PROGRAMMAZIONE ASSEMBLER
|
|
|
- Lidia Bassi
- 8 anni fa
- Visualizzazioni
Transcript
1 PROGRAMMAZIONE ASSEMBLER Esempio di semplice lampeggiatore a LED Sistemi Elettronici Dicembre 2006 Ultimo aggiornamento: 11 dicembre

2 OBBIETTIVI 1 Discutere delle metodologie di progetto e dei sistemi di sviluppo hw/sw di applicazioni basate sui microcontrollori 2 Realizzare un semplice circuito che accende e spegne un diodo LED a intervalli regolari di tempo basato su microcontrollori Microchip PIC 3 Acquisire una maggiore familiarità con il linguaggio assembler per microcontrollori 4 Approfondire la conoscenza dell architettura interna del micro necessaria per comprendere la struttura del firmware assembler 5 Mettere in evidenza i punti di forza e gli svantaggi della programmazione tramite linguaggio macchina. 2

3 IL MICROCONTROLLORE PIC16F84A HIGH PERFORMANCE RISC CPU FEATURES Only 35 single word instructions to learn Operating speed: DC - 20 MHz clock input 1024 words of program memory 68 bytes of Data RAM 64 bytes of Data EEPROM 14-bit wide instruction words 8-bit wide data bytes 15 Special Function Hardware registers Eight-level deep hardware stack Direct, indirect and relative addressing modes Four interrupt sources: - External RB0/INT pin - TMR0 timer overflow - PORTB<7:4> interrupt-on-change PERIPHERAL FEATURES 13 I/O pins with individual direction control High current sink/source for direct LED drive - 25 ma sink max. per pin - 25 ma source max. per pin TMR0: 8-bit timer/counter with 8-bit programmable prescaler CMOS ENHANCED FLASH/EEPROM TECHNOLOGY Low power, high speed technology Fully static design Wide operating voltage range: - Commercial: 2.0V to 5.5V - Industrial: 2.0V to 5.5V Low power consumption: - < 2 ma 5V, 4 MHz - 15 ma 2V, 32 khz - < 0.5 ma typical standby 2V SPECIAL MCU FEATURES In-Circuit Serial Programming (ICSP ) Power-on Reset, Power-up Timer, Oscillator Start-up Timer Watchdog Timer with On-Chip RC oscillator Code protection Power saving SLEEP mode Selectable oscillator options 3

4 PIN E PERIFERICHE INTERNE RA2 RA3 1 2 PORTA PC PORTA RA1 RA0 RA4/RTCC MCLR/Vpp 5 Vss 3 4 POWER-UP TIMER START-UP TIMER POWER ON RESET WDT TIMER0 STACK OSC OSC1/CLKIN OSC2/CLKOUT Vdd RB0/INT RB1 RB2 RB PORTB EEPROM Program Mem EEPROM Data Mem REG. FILE W ALU PORTB RB7 RB6 RB5 RB4 4

5 DESIGN FLOW SCRITTURA DEL MICRO FILE.HEX FIRMWARE OK SCRITTURA DEL CODICE ASSEMBLER COMPILAZIONE FILE.COD SIMULAZIONE E DEBUG FIRMWARE ERRATO 5

6

7

8

9 Ogni microcontrollore dispone di specifici pin per la programmazione, in genere è possibile programmare il micro anche quando già montato sul circuito finale (In-Circuit-Programming) PROGRAMMATORI STAND-ALONE DEVELOPMENT-BOARD 9
 PROGRAMMATORI STAND-ALONE")
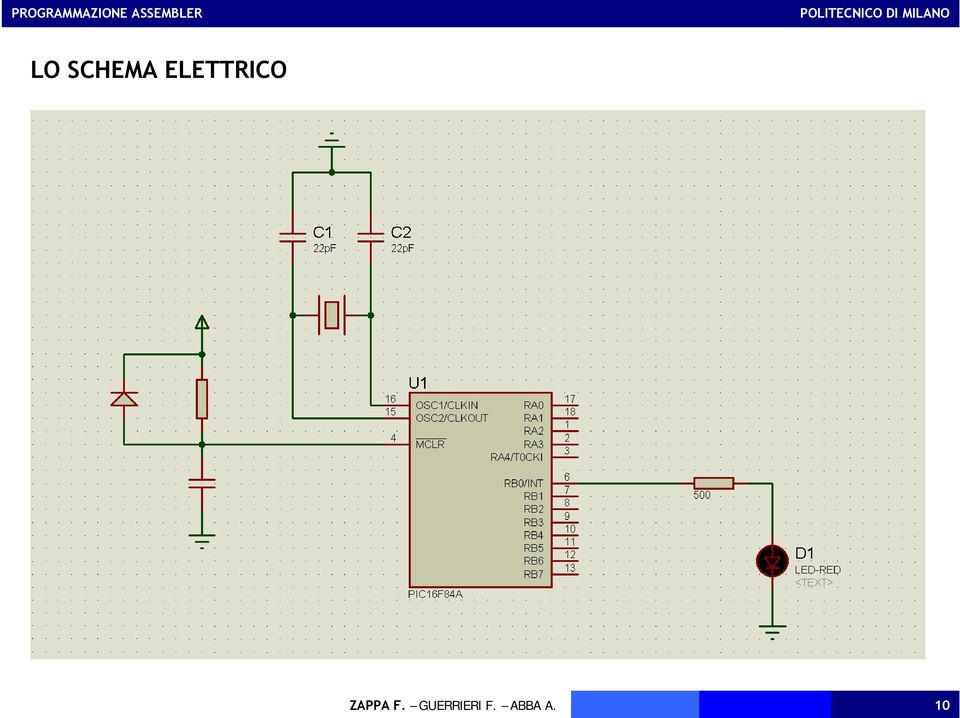
10 LO SCHEMA ELETTRICO 10
11
12

13 DIRETTIVE INIZIALI PROCESSOR RADIX 16F84A DEC E una direttiva per il compilatore che definisce il microcontrollore per cui si sta scrivendo il codice INCLUDE "P16F84A.INC" ; COSTANTI SIMBOLICHE LED EQU 0 ; DEFINIZIONE VARIABILI ORG 0CH Count RES 2 Indica al compilatore che tutti i numeri sono in notazione decimale, salvo se diversamente specificato Include nel sorgente del programma il file P16F84A.INC che contiene tutte costanti simboliche utilizzate nella programmazione 13

14 DIRETTIVE INIZIALI PROCESSOR RADIX 16F84A DEC E una direttiva per il compilatore che definisce il microcontrollore per cui si sta scrivendo il codice INCLUDE "P16F84A.INC" ; COSTANTI SIMBOLICHE LED EQU 0 ; DEFINIZIONE VARIABILI ORG 0CH Count RES 2 Indica al compilatore che tutti i numeri sono in notazione decimale, salvo se diversamente specificato Include nel sorgente del programma il file P16F84A.INC che contiene tutte costanti simboliche utilizzate nella programmazione 14

15 DIRETTIVE INIZIALI PROCESSOR RADIX 16F84A DEC E una direttiva per il compilatore che definisce il microcontrollore per cui si sta scrivendo il codice INCLUDE "P16F84A.INC" ; COSTANTI SIMBOLICHE LED EQU 0 ; DEFINIZIONE VARIABILI ORG 0CH Count RES 2 Indica al compilatore che tutti i numeri sono in notazione decimale, salvo se diversamente specificato Include nel sorgente del programma il file P16F84A.INC che contiene tutte costanti simboliche utilizzate nella programmazione 15

16 IL FILE INCLUDE P16F84A.INC 16

17 DIRETTIVE INIZIALI PROCESSOR RADIX INCLUDE 16F84A DEC "P16F84A.INC" Definisce una costante simbolica per una maggiore comodità di programmazione. Da questo punto in poi all etichetta LED è associato 0 ; COSTANTI SIMBOLICHE LED EQU 0 ; DEFINIZIONE VARIABILI ORG 0CH Count RES 2 E una direttiva che serve per decidere in quale parte della memoria dati verranno allocate le variabili dichiarate di seguito Riserviamo due byte di file register alla variabile Count nell area dati 17

18 DIRETTIVE INIZIALI PROCESSOR RADIX INCLUDE 16F84A DEC "P16F84A.INC" Definisce una costante simbolica per una maggiore comodità di programmazione. Da questo punto in poi all etichetta LED è associato 0 ; COSTANTI SIMBOLICHE LED EQU 0 ; DEFINIZIONE VARIABILI ORG 0CH Count RES 2 E una direttiva che serve per decidere in quale parte della memoria dati verranno allocate le variabili dichiarate di seguito Riserviamo due byte di file register alla variabile Count nell area dati 18

19 DIRETTIVE INIZIALI PROCESSOR RADIX INCLUDE 16F84A DEC "P16F84A.INC" Definisce una costante simbolica per una maggiore comodità di programmazione. Da questo punto in poi all etichetta LED è associato 0 ; COSTANTI SIMBOLICHE LED EQU 0 ; DEFINIZIONE VARIABILI ORG 0CH Count RES 2 E una direttiva che serve per decidere in quale parte della memoria dati verranno allocate le variabili dichiarate di seguito Riserviamo due byte di file register alla variabile Count nell area dati 19

20 COSA ABBIAMO FATTO FINO AD ORA? Sostanzialmente quasi nulla!!! Il programma vero e proprio non è ancora cominciato, infatti non è apparsa ancora alcuna istruzione, ma abbiamo solo scritto direttive. Le direttive sono servite a: Dare al compilatore alcune istruzioni per compilare il firmware Riservare dello spazio nella memoria per la variabile Count Definire una costante simbolica: LED == 0 20

21 IMPOSTAZIONE DEI REGISTRI Direttiva che stabilisce in quale punto della memoria programmi inserire le successive istruzioni. ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 movlw B movwf TRISA Mette a 1 il bit RP0 del registro STATUS che stabilisce a quale banco del file register ci si riferisce. Stiamo infatti per agire suiregistritrisa e TRISB che stanno nel banco 1 movlw movwf bcf bsf B TRISB STATUS,RP0 PORTB,LED Copia nel registro W il byte (tutti i pin della porta A sono degli input) Copia nel registro TRISA il contenuto di W precedentemente copiato 21
22 IMPOSTAZIONE DEI REGISTRI Il programma che stiamo creando verrà allocato in questa porzione della memoria Possiamo far partire il programma dalla posizione 0000h senza ulteriori accorgimenti perché in questo caso non abbiamo intenzione di utilizzare gli interrupt. L interrupt vector si trova infatti all indirizzo 0004h. 22
23 IMPOSTAZIONE DEI REGISTRI Direttiva che stabilisce in quale punto della memoria programmi inserire le successive istruzioni. ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 movlw B movwf TRISA Mette a 1 il bit RP0 del registro STATUS che stabilisce a quale banco del file register ci si riferisce. Stiamo infatti per agire suiregistritrisa e TRISB che stanno nel banco 1 movlw movwf bcf bsf B TRISB STATUS,RP0 PORTB,LED 23
24 IMPOSTAZIONE DEI REGISTRI Direttiva che stabilisce in quale punto della memoria programmi inserire le successive istruzioni. ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 movlw B movwf TRISA Mette a 1 il bit RP0 del registro STATUS che stabilisce a quale banco del file register ci si riferisce. Stiamo infatti per agire suiregistritrisa e TRISB che stanno nel banco 1 movlw movwf bcf bsf B TRISB STATUS,RP0 PORTB,LED Copia nel registro W il byte (tutti i pin della porta A sono degli input) Copia nel registro TRISA il contenuto di W precedentemente copiato 24
25 IMPOSTAZIONE DEI REGISTRI Direttiva che stabilisce in quale punto della memoria programmi inserire le successive istruzioni. ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 movlw B movwf TRISA Mette a 1 il bit RP0 del registro STATUS che stabilisce a quale banco del file register ci si riferisce. Stiamo infatti per agire suiregistritrisa e TRISB che stanno nel banco 1 movlw movwf bcf bsf B TRISB STATUS,RP0 PORTB,LED Copia nel registro W il byte (tutti i pin della porta A sono degli input) Copia nel registro TRISA il contenuto di W precedentemente copiato 25
26 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? movlw B movlw movwf B TRISA Il dato da memorizzare viene inviato verso l ALU ed il registro W Il dato viene memorizzato nel registro W 26
27 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? movlw B movlw movwf B TRISA B Il dato da memorizzare viene inviato verso l ALU ed il registro W Il dato viene memorizzato nel registro W 27
28 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? movlw B movlw movwf B TRISA B Il dato da memorizzare viene inviato verso l ALU ed il registro W B Il dato viene memorizzato nel registro W 28
29 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? movwf TRISA movlw movwf B TRISA Viene indirizzato il registro (TRISA) nel quale verrà salvato il dato B Il dato precedentemente memorizzato in W ripassa attraverso l ALU e raggiunge quindi il bus per essere memorizzato nel registro TRISA 29
30 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? movwf TRISA movlw movwf B TRISA IND. TRISA Viene indirizzato il registro (TRISA) nel quale verrà salvato il dato B Il dato precedentemente memorizzato in W ripassa attraverso l ALU e raggiunge quindi il bus per essere memorizzato nel registro TRISA 30
31 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? movwf TRISA movlw movwf B TRISA IND. TRISA Viene indirizzato il registro (TRISA) nel quale verrà salvato il dato B B Il dato precedentemente memorizzato in W ripassa attraverso l ALU e raggiunge quindi il bus per essere memorizzato nel registro TRISA 31
32 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? L istruzione viene caricata dalla memoria all istruction register muovi B in TRISA 32
33 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? L istruzione viene caricata dalla memoria all istruction register muovi B in TRISA IND. TRISA E possibile indirizzare il registro di destinazione e contemporaneamente inviare il dato da memorizzare? B B B 33
34 PERCHE PER COPIARE UN DATO IN UN REGISTRO DOBBIAMO PASSARE DA W? L istruzione viene caricata dalla memoria all istruction register muovi B in TRISA INDIRIZZO DATO E possibile indirizzare il registro di destinazione e contemporaneamente inviare il dato da memorizzare? NO, non ci possiamo permettere di mandare dato ed indirizzo contemporaneamente!! B B 34
35 E UN PROBLEMA LEGATO ALLA DIMENSIONE DELL OPCODE Per i microcontrollori PIC l opcode è grande 14 bit. Per eseguire l operazione di copia di un valore numerico direttamente in un registro servirebbero: 8 bit per il dato da copiare (lavoriamo con dati a 8 bit) 7 bit per specificare il registro (il file register è diviso in banchi da 127 celle, quindi si indirizza con 7 bit) 6 bit per indicare l operazione da utilizzare (il microcontrollore in esame ha 35 istruzioni, quindi si indica l istruzione con 6 bit) 21 bit (quindi servono 2 istruzioni per svolgere l operazione) 35
36 IMPOSTAZIONE DEI REGISTRI Copia in W il numero B (B indica che si sta fornendo il numeroin formatobinario) ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 Si copia il contenuto di W nel registro TRISB (tutti, tranne il pin 0 a cui collegheremo il LED, sono inpostati come input) movlw movwf movlw movwf bcf bsf B TRISA B TRISB STATUS,RP0 PORTB,LED Bit RP0 del registro STATUS = 0 (torniamonelbanco0 del file register) Accendo il LED collegato al pin RB0 mettendo a 1 il relativo bit del registro PORTB 36
37 IMPOSTAZIONE DEI REGISTRI Copia in W il numero B (B indica che si sta fornendo il numeroin formatobinario) ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 Si copia il contenuto di W nel registro TRISB (tutti, tranne il pin 0 a cui collegheremo il LED, sono inpostati come input) movlw movwf movlw movwf bcf bsf B TRISA B TRISB STATUS,RP0 PORTB,LED Bit RP0 del registro STATUS = 0 (torniamonelbanco0 del file register) Accendo il LED collegato al pin RB0 mettendo a 1 il relativo bit del registro PORTB 37
38 IMPOSTAZIONE DEI REGISTRI Copia in W il numero B (B indica che si sta fornendo il numeroin formatobinario) ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 Si copia il contenuto di W nel registro TRISB (tutti, tranne il pin 0 a cui collegheremo il LED, sono inpostati come input) movlw movwf movlw movwf bcf bsf B TRISA B TRISB STATUS,RP0 PORTB,LED Bit RP0 del registro STATUS = 0 (torniamonelbanco0 del file register) Accendo il LED collegato al pin RB0 mettendo a 1 il relativo bit del registro PORTB 38
39 IMPOSTAZIONE DEI REGISTRI Copia in W il numero B (B indica che si sta fornendo il numeroin formatobinario) ; IMPOSTAZIONE DEI REGISTRI ORG 00H bsf STATUS,RP0 Si copia il contenuto di W nel registro TRISB (tutti, tranne il pin 0 a cui collegheremo il LED, sono inpostati come input) movlw movwf movlw movwf bcf bsf B TRISA B TRISB STATUS,RP0 PORTB,LED Bit RP0 del registro STATUS = 0 (torniamonelbanco0 del file register) Accendo il LED collegato al pin RB0 mettendo a 1 il relativo bit del registro PORTB 39
40 CORPO DEL PROGRAMMA ; MAIN Main call Delay btfsc PORTB,LED SetToZero Etichetta Main. Serve come riferimento per funzioni di tipo Goto Chiama una routine che genera un ritardo di tempo costante Btfsc = Bit Test Flag Skip Clear Controlla lo stato attuale del pin a cui è collegato il LED. Se il LED è spento (uscita clear) salta la successiva istruzione. bsf SetToZero bcf PORTB,LED Main PORTB,LED Main Nel caso in cui il LED sia spento, il LED viene acceso ed infine l istruzione rimanda all inizio della routine. Nel caso invece in cui il led sia acceso l istruzione manda nella subroutine SetToZero dove il LED viene spento. Infine si ritorna anche in questo caso all inizio del Main. 40
41 CORPO DEL PROGRAMMA ; MAIN Main call Delay btfsc PORTB,LED SetToZero Etichetta Main. Serve come riferimento per funzioni di tipo Goto Chiama una routine che genera un ritardo di tempo costante Btfsc = Bit Test Flag Skip Clear Controlla lo stato attuale del pin a cui è collegato il LED. Se il LED è spento (uscita clear) salta la successiva istruzione. bsf SetToZero bcf PORTB,LED Main PORTB,LED Main Nel caso in cui il LED sia spento, il LED viene acceso ed infine l istruzione rimanda all inizio della routine. Nel caso invece in cui il led sia acceso l istruzione manda nella subroutine SetToZero dove il LED viene spento. Infine si ritorna anche in questo caso all inizio del Main. 41
42 CORPO DEL PROGRAMMA ; MAIN Main call Delay btfsc PORTB,LED SetToZero Etichetta Main. Serve come riferimento per funzioni di tipo Goto Chiama una routine che genera un ritardo di tempo costante Btfsc = Bit Test Flag Skip Clear Controlla lo stato attuale del pin a cui è collegato il LED. Se il LED è spento (uscita clear) salta la successiva istruzione. bsf SetToZero bcf PORTB,LED Main PORTB,LED Main Nel caso in cui il LED sia spento, il LED viene acceso ed infine l istruzione rimanda all inizio della routine. Nel caso invece in cui il led sia acceso l istruzione manda nella subroutine SetToZero dove il LED viene spento. Infine si ritorna anche in questo caso all inizio del Main. 42
43 ISTRUZIONE btfsc ( ) istruzione -1 istruzione 0 btfsc PORTB,LED il bit PORTB,LED == 0? SI NO istruzione 1 istruzione 2 ( ) 43
44 if IN ASSEMBLER test registro,bit salto VERO L istruzione di test in assembler esegue il controllo sul valore di un bit e a seconda del risultato: - l esecuzione del firmware prosegue inalterata ma viene saltata l istruzione successiva al test salto etichetta FALSO - l esecuzione del firmware prosegue inalterata E necessario quindi organizzare correttamente la struttura del firmware dotandola di opportuni salti al fine di gestire l istruzione di test etichetta fine dell if 44
45 if IN ASSEMBLER test registro,bit VERO salto VERO L istruzione di test in assembler esegue il controllo sul valore di un bit e a seconda del risultato: - l esecuzione del firmware prosegue inalterata ma viene saltata l istruzione successiva al test salto etichetta FALSO - l esecuzione del firmware prosegue inalterata E necessario quindi organizzare correttamente la struttura del firmware dotandola di opportuni salti al fine di gestire l istruzione di test etichetta fine dell if 45
46 if IN ASSEMBLER test registro,bit FALSO salto VERO L istruzione di test in assembler esegue il controllo sul valore di un bit e a seconda del risultato: - l esecuzione del firmware prosegue inalterata ma viene saltata l istruzione successiva al test salto etichetta FALSO - l esecuzione del firmware prosegue inalterata E necessario quindi organizzare correttamente la struttura del firmware dotandola di opportuni salti al fine di gestire l istruzione di test etichetta fine dell if 46
47 CORPO DEL PROGRAMMA ; MAIN Main call btfsc bsf SetToZero bcf FineIf Delay PORTB,LED SetToZero PORTB,LED FineIf PORTB,LED Main ATTENZIONE!!!! Versione alternativa NON ottimizzata e non utilizzata nel seguito. 47
48 CORPO DEL PROGRAMMA ; MAIN Main call Delay btfsc PORTB,LED SetToZero Etichetta Main. Serve come riferimento per funzioni di tipo Goto Chiama una routine che genera un ritardo di tempo costante Btfsc = Bit Test Flag Skip Clear Controlla lo stato attuale del pin a cui è collegato il LED. Se il LED è spento (uscita clear) salta la successiva istruzione. bsf SetToZero bcf PORTB,LED Main PORTB,LED Main Nel caso in cui il LED sia spento, il LED viene acceso ed infine l istruzione rimanda all inizio della routine. Nel caso invece in cui il led sia acceso l istruzione manda nella subroutine SetToZero dove il LED viene spento. Infine si ritorna anche in questo caso all inizio del Main. 48
49 CORPO DEL PROGRAMMA ; MAIN Main call Delay btfsc PORTB,LED SetToZero Etichetta Main. Serve come riferimento per funzioni di tipo Goto Chiama una routine che genera un ritardo di tempo costante Btfsc = Bit Test Flag Skip Clear Controlla lo stato attuale del pin a cui è collegato il LED. Se il LED è spento (uscita clear) salta la successiva istruzione. bsf SetToZero bcf PORTB,LED Main PORTB,LED Main Nel caso in cui il LED sia spento, il LED viene acceso ed infine l istruzione rimanda all inizio della routine. Nel caso invece in cui il led sia acceso l istruzione manda nella subroutine SetToZero dove il LED viene spento. Infine si ritorna anche in questo caso all inizio del Main. 49
50 LA ROUTINE DELAY ; DELAY Delay clrf Count clrf Count+1 DelayLoop decfsz Count,1 DelayLoop decfsz Count+1,1 DelayLoop return Azzera la prima e poi la seconda cella di memoria riservate all inizio per la variabile Count. L azzeramento della cella, caso particolare di scrittura di dati, può essere eseguito con una solo istruzione dedicata. Il problema dell opcode non si presenta in quanto non sono necessari gli 8 bit del dato (sempre = 0) END Count+1 0 Count 0 50
51 ISTRUZIONE decfsz ( ) istruzione -1 istruzione 0 Decfsz Count,1 Count = Count - 1 Count == 0? SI NO istruzione 1 istruzione 2 ( ) 51
52 52
53 LA ROUTINE DELAY ; DELAY Decrementa di 1 il primo byte di Count, se, dopo il decremento, Count == 0 allora viene saltata la successiva istruzione. Altrimenti riesegue il decremento. Delay clrf clrf DelayLoop decfsz decfsz return END Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 1 Count+1 0 Count
54 LA ROUTINE DELAY ; DELAY Decrementa di 1 il primo byte di Count, se, dopo il decremento, Count == 0 allora viene saltata la successiva istruzione. Altrimenti riesegue il decremento. Delay clrf clrf DelayLoop decfsz decfsz return END Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 2 Count+1 0 Count
55 LA ROUTINE DELAY ; DELAY Decrementa di 1 il primo byte di Count, se, dopo il decremento, Count == 0 allora viene saltata la successiva istruzione. Altrimenti riesegue il decremento. Delay clrf clrf DelayLoop decfsz decfsz return END Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 3 Count+1 0 Count
56 LA ROUTINE DELAY ; DELAY Decrementa di 1 il primo byte di Count, se, dopo il decremento, Count == 0 allora viene saltata la successiva istruzione. Altrimenti riesegue il decremento. Delay clrf clrf DelayLoop decfsz decfsz return END Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 255 Count+1 0 Count 1 56
57 LA ROUTINE DELAY ; DELAY Il secondo byte di Count viene decrementato di 1 ogni volta che il primo byte si azzera. Anche qui, dopo 256 decrementi, si salta l istruzione. Delay clrf clrf DelayLoop decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop END Count Count 0 57
58 LA ROUTINE DELAY ; DELAY Il secondo byte di Count viene decrementato di 1 ogni volta che il primo byte si azzera. Anche qui, dopo 256 decrementi, si salta l istruzione. Delay clrf clrf DelayLoop decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop END Count Count 0 58
59 LA ROUTINE DELAY ; DELAY Decrementa di 1 il primo byte di Count, se, dopo il decremento, Count == 0 allora viene saltata la successiva istruzione. Altrimenti riesegue il decremento. Delay clrf clrf DelayLoop decfsz decfsz return END Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 1 Count Count
60 LA ROUTINE DELAY ; DELAY Il secondo byte di Count viene decrementato di 1 ogni volta che il primo byte si azzera. Anche qui, dopo 256 decrementi, si salta l istruzione. Delay clrf clrf DelayLoop decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop END Count+1 1 Count 0 60
61 LA ROUTINE DELAY ; DELAY Decrementa di 1 il primo byte di Count, se, dopo il decremento, Count == 0 allora viene saltata la successiva istruzione. Altrimenti riesegue il decremento. Delay clrf clrf DelayLoop decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop END Count+1 0 Count 0 61
62 LA ROUTINE DELAY ; DELAY Delay clrf clrf DelayLoop decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop END Ritorna dalla routine nel Main. Segna la fine del programma 62
63 LA ROUTINE DELAY ; DELAY Delay clrf clrf DelayLoop decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop END Ritorna dalla routine nel Main. Segna la fine del programma 63
64 LA ROUTINE DELAY Delay DelayLoop clrf clrf decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop La routine Delay genera un ritardo di tempo sfruttando l esecuzione di cicli di istruzioni e la durata temporale di ognuna delle istruzioni. VANTAGGI 1. Il ritardo sintetizzato può essere molto preciso SVANTAGGI 1. La modifica del ritardo sintetizzato non è semplice 2. Il microcontrollore non può eseguire nessun altra istruzione mentre esegue la ruotine di ritardo (a meno di non utilizzare un interrupt che la interrompa) 3. Questo tipo di approccio non è facilmente utilizzabile con linguaggi ad alto livello 64
65 LA ROUTINE DELAY Quanto vale il ritardo sintetizzato? Leggendo il datasheet del microcontrollore è possibile conoscere la durata di ogni istruzione. In genere ogni istruzione dura 4 volte il periodo di clock (1 ciclo) del micro, ma ci sono alcune eccezioni, come le istruzioni, call e decfsz che possono durare 8 periodi di clock. Ipotiziamo un quarzo da 4 MHz. CLRF dura 1 ciclo, quindi 1 µs DECFSZ, quando non si verifica la condizione di salto della successiva istruzione dura 1 ciclo. Quando si verifica il salto dura 2 cicli. GOTO e RETURN durano sempre 2 cicli Delay DelayLoop clrf clrf decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 2+[(1+2)* ]* = µs Volendo essere più precisi andrebbero anche considerati i tempi necessari alle istruzioni nel Main per chiamare la routine 65
66 PERCHE ALCUNE ISTRUZIONI POSSONO DURARE 1 O 2 CICLI? MEMORIA Programmi e Dati MEMORIA Programma CPU CPU MEMORIA Dati Von-Neumann Harvard 66
67 PERCHE ALCUNE ISTRUZIONI POSSONO DURARE 1 O 2 CICLI? La procedura di esecuzione di una singola istruzione qualunque è divisa in varie fasi e richiede un tempo totale per l esecuzione pari a 8 PERIODI DI CLOCK Al fine di velocizzare l esecuzione delle istruzioni i microcontrollori PIC utilizzano un architettura Harvard al posto della classica Von-Neumann. L architettura Harvard presenta memorie separate per dati e programma che vengono indirizzati tramite due bus distinti. DATI PROGRAMMA 67
68 Questa struttura permette, NELLA MAGGIOR PARTE DEI CASI, di eseguire contemporaneamente L ESECUZIONE di una istruzione e il FETCH dell istruzione successiva. Si tratta di una struttura di tipo PIPELINE a due livelli che permette di ottenere un RADDOPPIO DEL RATE DI ISTRUZIONI/s DEL MICRO TCY è un intervallo di tempo della durata di 4 periodi di clock 68
69 PROBLEMA la pipeline non funziona nel caso in cui il risultato dell istruzione deve essere quello di modificare il flusso di esecuzione del programma, ovvero quando l istruzione modifica il Program Counter Questo è infatti un caso in cui l istruzione decide quale sarà la prossima istruzione da eseguire e di conseguenza è necessario attendere la completa esecuzione del comando prima di fare nuovamente il fetch (se non si attende la fine della fase di execute del comando non si conosce l indirizzo dell istruzione da eseguire!!) Il fetch dell istruzione 4 viene eseguito durante l esecuzione dell istruzione 3 che è una Call. Il risultato del fetch è però inutile dato che la Call carica nel PC l indirizzo di una diversa successiva istruzione. Per questo motivo nel successivo TCY non c è nessuna istruzione da eseguire ma si deve eseguire il fetch dell istruzione indicata dalla Call L esecuzione del firmware prosegue normalmente 69
70 Le istruzioni in questa situazione e che quindi durano 2 TCY sono: CALL GOTO Classiche istruzioni di salto o di chiamata di una routine RETFIE RETLW RETURN Sono instruzioni che si utilizzano per tornare nel codice principale da una sub-routine generica o da quella di gestione di interrupt Ci sono invece alcune istruzioni la cui durata dipende dall esito di un test: DECFSZ INCFSZ Incrementano o decrementano un registro. Viene saltata la successiva istruzione se il risultato dell operazione è0 BTFSC BTFSS Controllano lo stato di un bit di un registro. Viene saltata la successiva istruzione a seconda del valore del bit letto. 70
71 IL FIRMWARE COMPLETO PROCESSOR 16F84A RADIX DEC INCLUDE "P16F84A.INC" Main call btfsc Delay PORTB,LED SetToZero LED EQU 0 ORG Count RES 2 0CH SetToZero bsf bcf PORTB,LED Main PORTB,LED Main ORG bsf movlw movwf movlw movwf bcf 00H STATUS,RP B TRISA B TRISB STATUS,RP0 Delay DelayLoop clrf clrf decfsz decfsz return Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop bsf PORTB,LED END 71
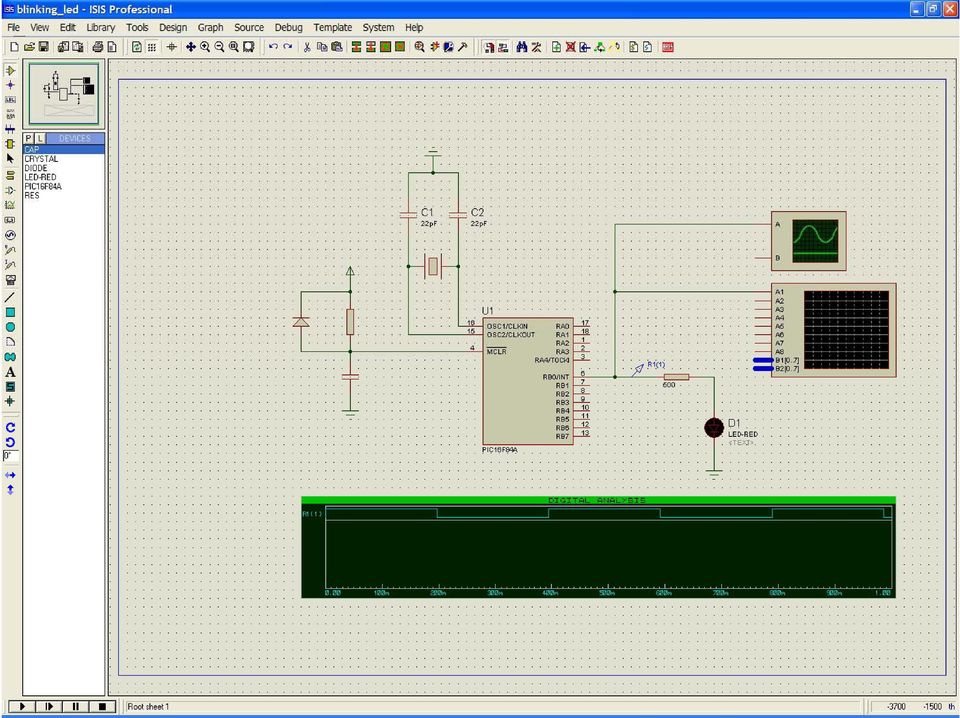
72 SIMULAZIONE DEL CIRCUITO Simulazione del circuito tramite il programma Proteus 72
73 RISULTATI DELLA SIMULAZIONE Entrambi gli strumenti hanno un base dei tempi impostata su 20 ms/div Questo significa che un segnale della durata di 200 ms (poco più del nostro caso) occuperebbe 10 divisioni, cioè l intero schermo L analizzatore logico permette di misurare gli intervalli di tempo tramite l utilizzo di apposite guide (in figura in viola) Il risultato della misura viene riportato dallo strumento attraverso appositi display: 196 ms!! LA SIMULAZIONE CONFERMA IL CALCOLO ANALITICO 73
74 IL CIRCUITO COMPLETO 35 mm 30 mm 74
75 IL CIRCUITO COMPLETO IL MICROCONTROLLORE 75
76 IL CIRCUITO COMPLETO IL QUARZO E I CONDENSATORI PER L OSCILLATORE INTERNO 76
77 IL CIRCUITO COMPLETO IL LED E LA RESISTENZA DI LIMITAZIONE DELLA CORRENTE 77
78 IL CIRCUITO COMPLETO EXTERNAL POWER-ON RESET CIRCUIT 78
79 MODIFICA 1 AGGIUNTA DI UN PULSANTE Ci proponiamo di modificare leggermente e il firmware e lo schema elettrico aggiungendo un pulsante la cui pressione determini l inizio del lampeggiamento del LED. E IL FIRMWARE? Naturalmente per poter accorgersi della pressione del pulsante il pin RB7 deve essere configurato come un ingresso. Nel nostro caso questa impostazione era già stata fatta all inizio del firmware ORG bsf 00H STATUS,RP0 La modifica al circuito consiste semplicemente nel collegamento di un pulsante e resistenza di pull-up al pin RB7 movlw B movwf TRISA movlw B movwf TRISB RB0/INT RB1 RB2 RB3 RB7 RB6 RB5 RB4 1=INPUT 0=OUTPUT 79
80 MODIFICA 1 AGGIUNTA DI UN PULSANTE PROCESSOR RADIX DEC INCLUDE LED EQU 0 SWITCH EQU 7 ORG Count RES 2 Main "P16F84A.INC" 0CH 16F84A btfsc PORTB,SWITCH $-1 call btfsc (Continua ) Delay PORTB,LED SetToZero Definiamo una costante simbolica per semplificare la programmazione, da ora in poi potremo riferirci al pin della porta B cui è collegato l interruttore senza dover ricordare quale pin precisamente fosse, basterà scrivere PORTB,SWITCH Controlliamo lo stato del pin che inizialmente sarà alto per via del pull-up. Quando il pulsante verrà premuto il suo stato andrà basso e verrà saltato il successivo per proseguire nel resto del programma Questa istruzione manda il programma all istruzione che si trova all indirizzo attuale del program counter (cioè l attuale posizione) -1. E un modo comodo per saltare indietro di una istruzione senza dover inserire un etichetta e appesantire il codice 80
81 MODIFICA 1 AGGIUNTA DI UN PULSANTE PROCESSOR RADIX DEC INCLUDE LED EQU 0 SWITCH EQU 7 ORG Count RES 2 Main "P16F84A.INC" 0CH 16F84A btfsc PORTB,SWITCH $-1 call btfsc (Continua ) Delay PORTB,LED SetToZero Definiamo una costante simbolica per semplificare la programmazione, da ora in poi potremo riferirci al pin della porta B cui è collegato l interruttore senza dover ricordare quale pin precisamente fosse, basterà scrivere PORTB,SWITCH Controlliamo lo stato del pin che inizialmente sarà alto per via del pull-up. Quando il pulsante verrà premuto il suo stato andrà basso e verrà saltato il successivo per proseguire nel resto del programma Questa istruzione manda il programma all istruzione che si trova all indirizzo attuale del program counter (cioè l attuale posizione) -1. E un modo comodo per saltare indietro di una istruzione senza dover inserire un etichetta e appesantire il codice 81
82 MODIFICA 1 AGGIUNTA DI UN PULSANTE PROCESSOR RADIX DEC INCLUDE LED EQU 0 SWITCH EQU 7 ORG Count RES 2 Main "P16F84A.INC" 0CH 16F84A btfsc PORTB,SWITCH $-1 call btfsc (Continua ) Delay PORTB,LED SetToZero Definiamo una costante simbolica per semplificare la programmazione, da ora in poi potremo riferirci al pin della porta B cui è collegato l interruttore senza dover ricordare quale pin precisamente fosse, basterà scrivere PORTB,SWITCH Controlliamo lo stato del pin che inizialmente sarà alto per via del pull-up. Quando il pulsante verrà premuto il suo stato andrà basso e verrà saltato il successivo per proseguire nel resto del programma Questa istruzione manda il programma all istruzione che si trova all indirizzo attuale del program counter (cioè l attuale posizione) -1. E un modo comodo per saltare indietro di una istruzione senza dover inserire un etichetta e appesantire il codice 82
83 MODIFICA 1 - IL FIRMWARE COMPLETO PROCESSOR 16F84A RADIX DEC INCLUDE LED EQU 0 SWITCH EQU 7 ORG Count RES 2 ORG bsf movlw movwf movlw movwf bcf bsf "P16F84A.INC" 0CH 00H STATUS,RP B TRISA B TRISB STATUS,RP0 PORTB,LED Main SetToZero Delay DelayLoop btfsc PORTB,SWITCH $-1 call Delay btfsc PORTB,LED SetToZero bsf PORTB,LED Main bcf PORTB,LED Main clrf Count clrf Count+1 decfsz Count,1 DelayLoop decfsz Count+1,1 DelayLoop return END 83
84 MODIFICA 2 UTILIZZO DI INTERRUPT L intento di questa seconda modifica è quello di gestire due diodi LED tramite due pulsanti. Ognuno dei due pulsanti sarà strettamente correlato ad uno dei due LED e la sua funzione sarà quella di avviare o fermare il lampeggiamento del LED stesso; il tutto in maniera indipendente dall altro LED. 84
85 MODIFICA 2 UTILIZZO DI INTERRUPT L intento di questa seconda modifica è quello di gestire due diodi LED tramite due pulsanti. Ognuno dei due pulsanti sarà strettamente correlato ad uno dei due LED e la sua funzione sarà quella di avviare o fermare il lampeggiamento del LED stesso; il tutto in maniera indipendente dall altro LED. 85
86 MODIFICA 2 UTILIZZO DI INTERRUPT L intento di questa seconda modifica è quello di gestire due diodi LED tramite due pulsanti. Ognuno dei due pulsanti sarà strettamente correlato ad uno dei due LED e la sua funzione sarà quella di avviare o fermare il lampeggiamento del LED stesso; il tutto in maniera indipendente dall altro LED. COME ORGANIZZARE IL NUOVO FIRMWARE? Il problema riguarda soprattutto la ruotine principale Main nella quale eseguiamo l operazione di lampeggiamento dei LED. Nell esempio iniziale, una volta acceso il circuito, non vi era nessun particolare evento che potesse disturbare l esecuzione del lampeggiamento. ORA LA SITUAZIONE E MOLTO DIVERSA IN QUANTO E NECESSARIO: 1 Verificare per ognuno dei due LED se esso debba o meno lampeggiare 2 Pilotare correttamente i LED per il lampeggiamento 3 Gestire gli eventi di pressione dei pulsanti di controllo che abilitano/fermano il lampeggiamento TUTTO QUANTO NELLA MANIERA PIU TRASPARENTE POSSIBILE, SENZA CIOE CHE IL LAMPEGGIAMENTO DEL LED NON COINVOLTO DALLA PRESSIONE DEL PULSANTE SI MODIFICHI SENSIBILMENTE!!! 86
87 MODIFICA 2 UTILIZZO DI INTERRUPT Analisi di alcuni possibili approcci al problema. Routine Main PULSANTE1 PREMUTO? Si Abilita lampeggiamento LED1 No Disabilita lampeggiamento LED1 PULSANTE2 PREMUTO? Si Abilita lampeggiamento LED2 No Disabilita lampeggiamento LED2 PROBLEMA 1 Queste istruzioni vengono eseguite ad ogni loop del Main, quindi influiscono SEMPRE sul lampeggiamento (il cui timing era stato così duramente calcolato nel primo esempio). Volendo potremmo anche tenerne conto ATTESA LED1 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla LED2 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla 87
88 MODIFICA 2 UTILIZZO DI INTERRUPT Analisi di alcuni possibili approcci al problema. Routine Main PROBLEMA 2 PULSANTE1 PREMUTO? Si Abilita lampeggiamento LED1 No Disabilita lampeggiamento LED1 PULSANTE2 PREMUTO? Si Abilita lampeggiamento LED2 No Disabilita lampeggiamento LED2 ATTESA LED1 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla CONTROLLO PULSANTE1 CONTROLLO PULSANTE2 Considerando i riflessi umani il pulsante viene tenuto premuto per circa 0,1 s. L attesa che abbiamo sintetizzato dura però 200ms (in genere non si scende molto al di sotto dato che vogliamo VEDERE il lampeggiamento). Quindi se la pressione non si verifica nell intervallo di tempo in cui controlliamo essa verrà persa!!! LED2 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla tempo 88
89 MODIFICA 2 UTILIZZO DI INTERRUPT Analisi di alcuni possibili approcci al problema. Routine Main PULSANTE1 PREMUTO? Si Abilita lampeggiamento LED1 No Disabilita lampeggiamento LED1 PULSANTE2 PREMUTO? Si Abilita lampeggiamento LED2 No Disabilita lampeggiamento LED2 1 µs A meno Su tutta di non la reiterare durata del il controllo ciclo il effettuandolo pulsante viene N volte letto prima solo di per: 1 µs passare oltre, l intervallo di tempo durante il quale si controlla dura 1 µs quanto una istruzione come BTFSS = 0,0005 % quindi 1 µs!!! µs ATTESA LED1 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla LED2 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla 200 ms 5 µs 5 µs tempo Basterebbe tenere premuto il pulsante più a lungo per avere la certezza che il circuito se ne accorga però non dovrebbe essere l utilizzatore ad adattarsi alla macchina, ma il contrario!!! 89
90 MODIFICA 2 UTILIZZO DI INTERRUPT La soluzione. Routine Main MAIN INTERRUPT ATTESA LED1 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla PULSANTE1? Si Abilita lampeggiamento LED1 No Non fare nulla LED2 DEVE LAMPEGGIARE? Si Inverti il suo stato No Non fare nulla PULSANTE2? Si Abilita lampeggiamento LED2 No Non fare nulla 90
91 DIRETTIVE VARIABILI IMPOSTAZ. REGISTRI MAIN ROUTINE DELAY INTERRUPT 91
92 DIRETTIVE VARIABILI INTERRUPT IMPOSTAZ. REGISTRI MAIN ROUTINE DELAY 92
93 DIRETTIVE VARIABILI INTERRUPT COME MAI IL FIRMWARE NON PUO ESSERE ESEGUITO IN MANIERA PIU SEQUENZIALE? Quando si verifica un interrupt il micro cessa la normale esecuzione delle istruzioni e nel PC viene caricato l indirizzo 0004h dell interrupt vector IMPOSTAZ. REGISTRI MAIN Dato che prima dell interrupt vector c è spazio solo per 3 istruzioni tipicamente si inserisce all indirizzo 0000h un che punta all inizio vero e proprio del programma. ROUTINE DELAY 93
94 PROCESSOR RADIX INCLUDE 16F84A DEC "P16F84A.INC" LED1 EQU 0 LED2 EQU 1 SWITCH1 EQU 6 SWITCH2 EQU 7 ORG Count RES 2 QUALE RES 1 ORG 0CH 00H inizio LED1 RB0 LED2 RB1 SWITCH1 RB6 SWITCH2 RB7 Definiamo la variabile QUALE di un byte che useremo per stabilire se i LED devono o meno lampeggiare. Associamo il bit 1 al LED1 e il bit 2 al LED2. Il bit 1 viene modificato dallo SWITCH1 mentre il bit 2 dallo SWITCH2 Questa istruzione realizza quello che nello schema a blocchi è il salto in nero Come mai è necessario? QUALE
95 PROCESSOR RADIX INCLUDE 16F84A DEC "P16F84A.INC" LED1 EQU 0 LED2 EQU 1 SWITCH1 EQU 6 SWITCH2 EQU 7 ORG Count RES 2 QUALE RES 1 ORG 0CH 00H inizio LED1 RB0 LED2 RB1 SWITCH1 RB6 SWITCH2 RB7 Definiamo la variabile QUALE di un byte che useremo per stabilire se i LED devono o meno lampeggiare. Associamo il bit 1 al LED1 e il bit 2 al LED2. Il bit 1 viene modificato dallo SWITCH1 mentre il bit 2 dallo SWITCH2 Questa istruzione realizza quello che nello schema a blocchi è il salto in nero Come mai è necessario? QUALE
96 PROCESSOR RADIX INCLUDE 16F84A DEC "P16F84A.INC" LED1 EQU 0 LED2 EQU 1 SWITCH1 EQU 6 SWITCH2 EQU 7 ORG Count RES 2 QUALE RES 1 ORG 0CH 00H inizio LED1 RB0 LED2 RB1 SWITCH1 RB6 SWITCH2 RB7 Definiamo la variabile QUALE di un byte che useremo per stabilire se i LED devono o meno lampeggiare. Associamo il bit 1 al LED1 e il bit 2 al LED2. Il bit 1 viene modificato dallo SWITCH1 mentre il bit 2 dallo SWITCH2 Questa istruzione realizza quello che nello schema a blocchi è il salto in nero QUALE
97 DIRETTIVE VARIABILI INTERRUPT COME MAI IL FIRMWARE NON PUO ESSERE ESEGUITO IN MANIERA PIU SEQUENZIALE? Quando si verifica un interrupt il micro cessa la normale esecuzione delle istruzioni e nel PC viene caricato l indirizzo 0004h dell interrupt vector IMPOSTAZ. REGISTRI MAIN Dato che prima dell interrupt vector c è spazio solo per 3 istruzioni tipicamente si inserisce all indirizzo 0000h un che punta all inizio vero e proprio del programma. ROUTINE DELAY 97
98 inizio bsf movlw movwf movlw movwf movlw andwf movlw movwf bcf clrf STATUS,RP B TRISA B TRISB B OPTION_REG,F B INTCON STATUS,RP0 QUALE Ora i LED sono 2, servono due output Imposta il registro OPTION_REG. Mettendo a zero il bit 7 imposta il pull-up resistivo interno sui pin della porta B (risparmiamo un resistore!!!) 98
99 OPERAZIONI DI MASCHERAMENTO CON OPERATORI LOGICI: AND REGISTRO AND COSTANTE A and B = OUT REGISTRO A B OUT I bit vengono forzati a 0 I bit rimangono inalterati
100 inizio bsf movlw movwf movlw movwf movlw andwf movlw movwf bcf clrf STATUS,RP B TRISA B TRISB B OPTION_REG,F B INTCON STATUS,RP0 QUALE Imposta il registro INTCON. Per il momento abilitiamo soltanto il Global Interrupt Enable (bit7) ma ancora non abilitiamo l interrupt specifico (che si abilita ponendo a 1 il bit3; il bit0 è il relativo flag) Azzero la variabile QUALE in modo che all inizio i LED non lampeggino INTCON 100
101 Main call bcf bsf Delay INTCON,0 INTCON,3 Chiama la routine Delay per dare il tempo alle impostazioni di divenire effettive (serve per evitare falsi interventi dell interrupt alla partenza). Solo successivamente viene attivato l interrupt e azzerato il relativo flag call btfss movlw xorwf Delay QUALE,1 led1_fermo B PORTB,F Controlla il bit1 della variabile QUALE: se è 1 salta la successiva istruzione e inverte lo stato del LED1 led1_fermo btfss movlw xorwf QUALE,2 Main B PORTB,F Main Invece di introdurre un ulteriore test che stabilisca la successiva istruzione da eseguire (bcf per azzerare o bsf per asserire). Invertiamo lo stato del bit direttamente sfruttando l ALU interna tramite l istruzione xorwf che effettua lo XOR tra il byte nel registro W e il contenuto di un registro, salvando il risultato nel registro stesso. A XOR 0 = A A XOR 1 =!A 101
102 Main call bcf bsf Delay INTCON,0 INTCON,3 Chiama la routine Delay per dare il tempo alle impostazioni di divenire effettive (serve per evitare falsi interventi dell interrupt alla partenza). Solo successivamente viene attivato l interrupt e azzerato il relativo flag call btfss movlw xorwf Delay QUALE,1 led1_fermo B PORTB,F Controlla il bit1 della variabile QUALE: se è 1 salta la successiva istruzione e inverte lo stato del LED1 led1_fermo btfss movlw xorwf QUALE,2 Main B PORTB,F Main Invece di introdurre un ulteriore test che stabilisca la successiva istruzione da eseguire (bcf per azzerare o bsf per asserire) invertiamo lo stato del bit sfruttando l ALU interna tramite l istruzione xorwf che effettua lo XOR tra il byte nel registro W e il contenuto di un registro, salvando il risultato nel registro stesso. A XOR 0 = A A XOR 1 =!A 102
103 OPERAZIONI DI MASCHERAMENTO CON OPERATORI LOGICI: XOR REGISTRO XOR COSTANTE A xor B = OUT REGISTRO A B OUT I bit rimangono inalterati I bit vengono invertiti
104 call bcf bsf Delay INTCON,0 INTCON,3 Main call btfss movlw xorwf Delay QUALE,1 led1_fermo B PORTB,F Se invece il bit1 di QUALE dovesse essere 0 salta all etichetta led1_fermo led1_fermo btfss movlw xorwf QUALE,2 Main B PORTB,F Main Come prima controlla lo stato del bit2 della variabile QUALE che indica se il LED2 deve lampeggiare. Se il bit2 è 1 allora inverte lo stato del LED2 altrimenti torna all inizio del Main 104
105 call bcf bsf Delay INTCON,0 INTCON,3 Main call btfss movlw xorwf Delay QUALE,1 led1_fermo B PORTB,F Se invece il bit1 di QUALE dovesse essere 0 salta all etichetta led1_fermo led1_fermo btfss movlw xorwf QUALE,2 Main B PORTB,F Main Come prima controlla lo stato del bit2 della variabile QUALE che indica se il LED2 deve lampeggiare. Se il bit2 è 1 allora inverte lo stato del LED2 altrimenti torna all inizio del Main 105
106 ORG 04H Context Push Indica che le istruzioni seguenti verranno memorizzate a partire dall indirizzo 0004h, ovvero a partire dall interrupt vector btfsc movlw xorwf PORTB,SWITCH1 altro_led B QUALE,F fine_int altro_led btfsc movlw xorwf PORTB,SWITCH2 fine_int B QUALE,F fine_int Context Pop bcf retfie INTCON,0 106
107 CONTEXT SAVING Quando si entra nella routine di interrupt la prima operazione da eseguire, dopo aver disabilitato l interrupt per evitare nidificazioni, è quella del context saving Il salvataggio del contesto è infatti necessario al fine di garantire che l interrupt risulti TRASPARENTE al programma principale e non ne pregiudichi il funzionamento. ( ) movlw B movwf TRISB ( ) 107
108 CONTEXT SAVING Quando si entra nella routine di interrupt la prima operazione da eseguire, dopo aver disabilitato l interrupt per evitare nidificazioni, è quella del context saving Il salvataggio del contesto è infatti necessario al fine di garantire che l interrupt risulti TRASPARENTE al programma principale e non ne pregiudichi il funzionamento. ( ) movlw B movwf TRISB ( ) 108
109 CONTEXT SAVING Quando si entra nella routine di interrupt la prima operazione da eseguire, dopo aver disabilitato l interrupt per evitare nidificazioni, è quella del context saving Il salvataggio del contesto è infatti necessario al fine di garantire che l interrupt risulti TRASPARENTE al programma principale e non ne pregiudichi il funzionamento. ( ) INTERRUPT movlw B ( ) bsf movlw 5H W = B movwf TRISB movwf clrf ( ) ( ) 109
110 CONTEXT SAVING Quando si entra nella routine di interrupt la prima operazione da eseguire, dopo aver disabilitato l interrupt per evitare nidificazioni, è quella del context saving Il salvataggio del contesto è infatti necessario al fine di garantire che l interrupt risulti TRASPARENTE al programma principale e non ne pregiudichi il funzionamento. ( ) INTERRUPT movlw B ( ) bsf movlw 5H W = B W = B movwf TRISB movwf clrf ( ) TRISB = B ( ) 110
111 CONTEXT SAVING Quando si entra nella routine di interrupt la prima operazione da eseguire, dopo aver disabilitato l interrupt per evitare nidificazioni, è quella del context saving Il salvataggio del contesto è infatti necessario al fine di garantire che l interrupt risulti TRASPARENTE al programma principale e non ne pregiudichi il funzionamento. movlw 3 xorwf btfsc Variabile,W STATUS,Z Qui in mezzo non deve accadere nulla ai flag del registro di STATUS (in particolare a Z) altrimenti invalideremmo il test!!! ( ) 111
112 CONTEXT SAVING: COME APPLICARLO Il context saving viene eseguito semplicemente salvando in opportune variabili temporanee create appositamente il valore del registro W e del registro STATUS E necessario però effettuare l operazione utilizzando solamente istruzioni che non modifichino in alcun modo i flag del registro STATUS: ecco il motivo per cui si utilizza l istruzione SWAPF invece di una più intuitiva istruzione MOVF ORG 04H Context Push movwf W_TEMP swapf STATUS, W movwf STATUS_TEMP ( ) Context Pop bcf INTCON,0 retfie swapf STATUS_TEMP,W movwf STATUS swapf W_TEMP, F swapf W_TEMP, W Logicamente all inizio del programma è necessario definire le variabili STATUS_TEMP e W_TEMP 112
113 ORG 04H Context Push Indica che le istruzioni seguenti verranno memorizzate a partire dall indirizzo 0004h, ovvero a partire dall interrupt vector btfsc movlw xorwf PORTB,SWITCH1 altro_led B QUALE,F fine_int Controlla se è stato premuto il pulsante 1 (verifica che il relativo pin sia a 0). Se Si viene invertito il valore del bit1 della variabile QUALE che dice se il LED1 deve o no lampeggiare altro_led fine_int btfsc movlw xorwf PORTB,SWITCH2 fine_int B QUALE,F Se non è stato premuto il pulsante 1 viene controllato il pulsante 2. In linea di principio questo secondo controllo non sarebbe necessario, ma viene fatto per maggiore sicurezza. Context Pop bcf INTCON,0 retfie Alla fine della procedura di gestione dell interrupt viene riabilitato l interrupt azzerando il flag associato (ogni volta che si verifica l interrupt è necessario azzerare via firmware il flag per riattivarlo). 113
114 ORG 04H Context Push Indica che le istruzioni seguenti verranno memorizzate a partire dall indirizzo 0004h, ovvero a partire dall interrupt vector btfsc movlw xorwf PORTB,SWITCH1 altro_led B QUALE,F fine_int Controlla se è stato premuto il pulsante 1 (verifica che il relativo pin sia a 0). Se Si viene invertito il valore del bit1 della variabile QUALE che dice se il LED1 deve o no lampeggiare altro_led fine_int btfsc movlw xorwf PORTB,SWITCH2 fine_int B QUALE,F Se non è stato premuto il pulsante 1 viene controllato il pulsante 2. In linea di principio questo secondo controllo non sarebbe necessario, ma viene fatto per maggiore sicurezza. Context Pop bcf INTCON,0 retfie Alla fine della procedura di gestione dell interrupt viene riabilitato l interrupt azzerando il flag associato (ogni volta che si verifica l interrupt è necessario azzerare via firmware il flag per riattivarlo). 114
115 ORG 04H Context Push Indica che le istruzioni seguenti verranno memorizzate a partire dall indirizzo 0004h, ovvero a partire dall interrupt vector btfsc movlw xorwf PORTB,SWITCH1 altro_led B QUALE,F fine_int Controlla se è stato premuto il pulsante 1 (verifica che il relativo pin sia a 0). Se Si viene invertito il valore del bit1 della variabile QUALE che dice se il LED1 deve o no lampeggiare altro_led fine_int btfsc movlw xorwf PORTB,SWITCH2 fine_int B QUALE,F Se non è stato premuto il pulsante 1 viene controllato il pulsante 2. In linea di principio questo secondo controllo non sarebbe necessario, ma viene fatto per maggiore sicurezza. Context Pop bcf INTCON,0 retfie Alla fine della procedura di gestione dell interrupt viene riabilitato l interrupt azzerando il flag associato (ogni volta che si verifica l interrupt è necessario azzerare via firmware il flag per riattivarlo). 115
116 PROCESSOR RADIX INCLUDE LED1 EQU 0 LED2 EQU 1 SWITCH1 EQU 6 SWITCH2 EQU 7 ORG Count RES 2 QUALE RES 1 altro_led fine_int ORG ORG Context Push btfsc movlw xorwf btfsc movlw xorwf Context Pop 16F84A DEC "P16F84A.INC" 0CH 00H inizio 04H PORTB,SWITCH1 altro_led B QUALE,F fine_int PORTB,SWITCH2 fine_int B QUALE,F 1 inizio bsf movlw movwf movlw movwf movlw andwf movlw movwf bcf STATUS,RP B TRISA B TRISB B OPTION_REG B INTCON STATUS,RP0 Main led1_fermo Delay DelayLoop call bcf bsf call btfss movlw xorwf btfss movlw xorwf clrf clrf decfsz decfsz return Delay INTCON,0 INTCON,3 Delay QUALE,1 led1_fermo B PORTB,F QUALE,2 Main B PORTB,F Main Count Count+1 Count,1 DelayLoop Count+1,1 DelayLoop 4 bcf retfie INTCON,0 2 clrf QUALE 3 END 5 116
Lezione 8. Figura 1. Configurazione del registro INTCON
 Lezione 8 In questa puntata, ci dedicheremo all'impiego dei cosiddetti "interrupt", che tanto incutono temore ai più inesperti. Ma che cosa sono questi interrupt? Come abbiamo già visto, un programma non
Lezione 8 In questa puntata, ci dedicheremo all'impiego dei cosiddetti "interrupt", che tanto incutono temore ai più inesperti. Ma che cosa sono questi interrupt? Come abbiamo già visto, un programma non
Lezione 4. Figura 1. Schema di una tastiera a matrice di 4x4 tasti
 Lezione 4 Uno degli scogli maggiori per chi inizia a lavorare con i microcontroller, è l'interfacciamento con tastiere a matrice. La cosa potrebbe a prima vista sembrare complessa, ma in realtà è implementabile
Lezione 4 Uno degli scogli maggiori per chi inizia a lavorare con i microcontroller, è l'interfacciamento con tastiere a matrice. La cosa potrebbe a prima vista sembrare complessa, ma in realtà è implementabile
PROCESSOR 16F84A. ;configurazione FUSES: oscillatore XT, WDT disabilitato PWRT abilitato, CP disabilitato config 0x3FF1
 ---- ; Programma per ROBOT MDB3F2004-05 Evolution ; Autore: MICCI Antonello copyright 2005 ---- ------------------------- ;Piedino RA0 ingresso fotocellula dx livello basso rilevazione ostacolo ;Piedino
---- ; Programma per ROBOT MDB3F2004-05 Evolution ; Autore: MICCI Antonello copyright 2005 ---- ------------------------- ;Piedino RA0 ingresso fotocellula dx livello basso rilevazione ostacolo ;Piedino
CIRCUITO DI TEST E SOFTWARE UTILIZZATI
 CIRCUITO DI TEST E SOFTWARE UTILIZZATI Circuito di Test Nello schema elettrico di figura A è rappresentato un circuito, realizzabile anche senza l ausilio di un circuito stampato, che consente di testare
CIRCUITO DI TEST E SOFTWARE UTILIZZATI Circuito di Test Nello schema elettrico di figura A è rappresentato un circuito, realizzabile anche senza l ausilio di un circuito stampato, che consente di testare
INTRODUZIONE alla PROGRAMMAZIONE di MICROCONTROLLORI
 LUCIDI LEZIONI SISTEMI ELETTRONICI INDUSTRIALI www.dismi.unimo.it (People Associated Pavan ) www.microchip.com com (Datasheet PIC - DS30292) (Mid Range Family Manual DS33023) Università degli Studi di
LUCIDI LEZIONI SISTEMI ELETTRONICI INDUSTRIALI www.dismi.unimo.it (People Associated Pavan ) www.microchip.com com (Datasheet PIC - DS30292) (Mid Range Family Manual DS33023) Università degli Studi di
8 Microcontrollori PIC
 8 Microcontrollori PIC 8.1 Descrizione generale Un microcontrollore è un dispositivo elettronico che opportunamente programmato è in grado di svolgere diverse funzioni in modo autonomo. Essenzialmente
8 Microcontrollori PIC 8.1 Descrizione generale Un microcontrollore è un dispositivo elettronico che opportunamente programmato è in grado di svolgere diverse funzioni in modo autonomo. Essenzialmente
Lezione 1 Caratteristiche principali del PIC16C84 L'hardware
 Lezione 1 Nella prima lezione del corso, cercheremo di comprendere come sia fatto internamente il controller più conosciuto di Microchip, ovvero il PIC16C84 poi evoluto nel PIC16F84. Sebbene i microcontroller
Lezione 1 Nella prima lezione del corso, cercheremo di comprendere come sia fatto internamente il controller più conosciuto di Microchip, ovvero il PIC16C84 poi evoluto nel PIC16F84. Sebbene i microcontroller
ESERCIZI SUI SISTEMI DI NUMERAZIONE
 ESERCIZI SUI SISTEMI DI NUMERAZIONE 1 ) Convertire in base 10 i seguenti numeri rappresentati nelle basi indicate: (1000101) 2 [R. 69] (477) 8 [R. 319] (40F) 16 [R. 1039] (5778) 9 [R. 4283] (126) 9 [R.
ESERCIZI SUI SISTEMI DI NUMERAZIONE 1 ) Convertire in base 10 i seguenti numeri rappresentati nelle basi indicate: (1000101) 2 [R. 69] (477) 8 [R. 319] (40F) 16 [R. 1039] (5778) 9 [R. 4283] (126) 9 [R.
CPU. Maurizio Palesi
 CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
4 3 4 = 4 x 10 2 + 3 x 10 1 + 4 x 10 0 aaa 10 2 10 1 10 0
 Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
MICROCONTROLLORE PIC16F84A
 MICROCONTROLLORE PIC16F84A Il microcontrollore pic16f84a, a differenza di un computer normale e' dotato in un unico integrato di tutti gli elementi fondamentali di un computer, che sono la Cpu, unita'
MICROCONTROLLORE PIC16F84A Il microcontrollore pic16f84a, a differenza di un computer normale e' dotato in un unico integrato di tutti gli elementi fondamentali di un computer, che sono la Cpu, unita'
LABORATORIO DI SISTEMI
 ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
A/D CON PIC 16F877. Sommario INTRODUZIONE... 2 SELEZIONARE I BANCHI... 2 ADCON0... 4 ADCS1, ADCS0... 4 CH2, CH1 E CH0... 5 GO/DONE... 6 ADON...
 A/D CON PIC 16F877 Sommario INTRODUZIONE... 2 SELEZIONARE I BANCHI... 2... 4 ADCS1, ADCS0... 4 CH2, CH1 E CH0... 5 GO/DONE... 6 ADON... 7 ESEMPIO 1... 7 ADCON1... 8 ADFM... 8 PGF3, PGF1 E PGF0... 9 ESEMPIO
A/D CON PIC 16F877 Sommario INTRODUZIONE... 2 SELEZIONARE I BANCHI... 2... 4 ADCS1, ADCS0... 4 CH2, CH1 E CH0... 5 GO/DONE... 6 ADON... 7 ESEMPIO 1... 7 ADCON1... 8 ADFM... 8 PGF3, PGF1 E PGF0... 9 ESEMPIO
Architettura del PIC 18F452
 Controllo Digitale a.a. 2005-2006 Architettura del PIC 18F452 Ing. Federica Pascucci PIC 18F452 Caratteristiche Frequenza operativa: 40 MHz Memorie: Program FLASH memory: 32 KBytes, 16 K-istruzioni memorizzabili
Controllo Digitale a.a. 2005-2006 Architettura del PIC 18F452 Ing. Federica Pascucci PIC 18F452 Caratteristiche Frequenza operativa: 40 MHz Memorie: Program FLASH memory: 32 KBytes, 16 K-istruzioni memorizzabili
PUNTATORE LASER AUTOMATICO CON COMANDO VIA ETHERNET
 Canzian Sara Liberali Marco 5AT A.S.2007/2008 PUNTATORE LASER AUTOMATICO CON COMANDO VIA ETHERNET Questo sistema permette di posizionare una luce laser in una determinata posizione data dalle coordinate
Canzian Sara Liberali Marco 5AT A.S.2007/2008 PUNTATORE LASER AUTOMATICO CON COMANDO VIA ETHERNET Questo sistema permette di posizionare una luce laser in una determinata posizione data dalle coordinate
Il processore. Il processore. Il processore. Il processore. Architettura dell elaboratore
 Il processore Architettura dell elaboratore Il processore La esegue istruzioni in linguaggio macchina In modo sequenziale e ciclico (ciclo macchina o ciclo ) Effettuando operazioni di lettura delle istruzioni
Il processore Architettura dell elaboratore Il processore La esegue istruzioni in linguaggio macchina In modo sequenziale e ciclico (ciclo macchina o ciclo ) Effettuando operazioni di lettura delle istruzioni
Arduino: Programmazione
 Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Calcolatori Elettronici. La Pipeline Criticità sui dati Criticità sul controllo Cenni sull unità di controllo
 Calcolatori Elettronici La Pipeline Criticità sui dati Criticità sul controllo Cenni sull unità di controllo La pipeline CRITICITÀ SUI DATI Calcolatori Elettronici - Pipeline (2) - Slide 2 L. Tarantino
Calcolatori Elettronici La Pipeline Criticità sui dati Criticità sul controllo Cenni sull unità di controllo La pipeline CRITICITÀ SUI DATI Calcolatori Elettronici - Pipeline (2) - Slide 2 L. Tarantino
Powered by: Relators:
 Powered by: Hacking Group Como www.hgcomo.org Relators: Beretta Matteo, matteo@hgcomo.org Pizzagalli Diego Ulisse ulisse@hgcomo.org Atmel AVR Studio 4 integra al suo interno un ambiente di programmazione
Powered by: Hacking Group Como www.hgcomo.org Relators: Beretta Matteo, matteo@hgcomo.org Pizzagalli Diego Ulisse ulisse@hgcomo.org Atmel AVR Studio 4 integra al suo interno un ambiente di programmazione
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 La CPU e l esecuzione dei programmi 1 Nelle lezioni precedenti abbiamo detto che Un computer è costituito da 3 principali componenti:
per chimica industriale e chimica applicata e ambientale LEZIONE 4 La CPU e l esecuzione dei programmi 1 Nelle lezioni precedenti abbiamo detto che Un computer è costituito da 3 principali componenti:
ARCHITETTURE MICROPROGRAMMATE. 1. Necessità di un architettura microprogrammata 1. Cos è un architettura microprogrammata? 4
 ARCHITETTURE MICROPROGRAMMATE. 1 Necessità di un architettura microprogrammata 1 Cos è un architettura microprogrammata? 4 Struttura di una microistruzione. 5 Esempi di microprogrammi 9 Esempio 1 9 Esempio
ARCHITETTURE MICROPROGRAMMATE. 1 Necessità di un architettura microprogrammata 1 Cos è un architettura microprogrammata? 4 Struttura di una microistruzione. 5 Esempi di microprogrammi 9 Esempio 1 9 Esempio
09-05-07. Introduzione ai microcontrollori PIC
 09-05-07 Introduzione ai microcontrollori PIC Daniele Beninato: Nicola Trivellin: beninato@dei.unipd.it trive1@tin.it Che cosa è un microcontrollore? Un microcontrollore è un sistema a microprocessore
09-05-07 Introduzione ai microcontrollori PIC Daniele Beninato: Nicola Trivellin: beninato@dei.unipd.it trive1@tin.it Che cosa è un microcontrollore? Un microcontrollore è un sistema a microprocessore
Architettura del calcolatore
 Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Gestione della memoria centrale
 Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
CALCOLATORI ELETTRONICI A cura di Luca Orrù. Lezione n.7. Il moltiplicatore binario e il ciclo di base di una CPU
 Lezione n.7 Il moltiplicatore binario e il ciclo di base di una CPU 1 SOMMARIO Architettura del moltiplicatore Architettura di base di una CPU Ciclo principale di base di una CPU Riprendiamo l analisi
Lezione n.7 Il moltiplicatore binario e il ciclo di base di una CPU 1 SOMMARIO Architettura del moltiplicatore Architettura di base di una CPU Ciclo principale di base di una CPU Riprendiamo l analisi
Ing. Paolo Domenici PREFAZIONE
 Ing. Paolo Domenici SISTEMI A MICROPROCESSORE PREFAZIONE Il corso ha lo scopo di fornire i concetti fondamentali dei sistemi a microprocessore in modo semplice e interattivo. È costituito da una parte
Ing. Paolo Domenici SISTEMI A MICROPROCESSORE PREFAZIONE Il corso ha lo scopo di fornire i concetti fondamentali dei sistemi a microprocessore in modo semplice e interattivo. È costituito da una parte
Architettura hardware
 Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
Invio SMS. DM Board ICS Invio SMS
 Invio SMS In questo programma proveremo ad inviare un SMS ad ogni pressione di uno dei 2 tasti della DM Board ICS. Per prima cosa creiamo un nuovo progetto premendo sul pulsante (Create new project): dove
Invio SMS In questo programma proveremo ad inviare un SMS ad ogni pressione di uno dei 2 tasti della DM Board ICS. Per prima cosa creiamo un nuovo progetto premendo sul pulsante (Create new project): dove
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
A intervalli regolari ogni router manda la sua tabella a tutti i vicini, e riceve quelle dei vicini.
 Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione.
 Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Esempio: aggiungere j
 Esempio: aggiungere j Eccezioni e interruzioni Il progetto del controllo del processore si complica a causa della necessità di considerare, durante l esecuzione delle istruzioni, il verificarsi di eventi
Esempio: aggiungere j Eccezioni e interruzioni Il progetto del controllo del processore si complica a causa della necessità di considerare, durante l esecuzione delle istruzioni, il verificarsi di eventi
APPUNTI SUL PIC16F84
 APPUNTI SUL PIC16F84 Gianluca 'gurutech' Mascolo v0.1 04/04/2004 mailto: gurutech_at_gurutech.it Hackit04 Il PIC16F84 è un microcontrollore a 8-bit dotato di due porte di I/O digitali, una da 5 bit e una
APPUNTI SUL PIC16F84 Gianluca 'gurutech' Mascolo v0.1 04/04/2004 mailto: gurutech_at_gurutech.it Hackit04 Il PIC16F84 è un microcontrollore a 8-bit dotato di due porte di I/O digitali, una da 5 bit e una
Microcontrollori. L ultima parte del corso prevede un approfondimento sui microprocessori, in particolare sul PIC 16F876.
 111 Microcontrollori L ultima parte del corso prevede un approfondimento sui microprocessori, in particolare sul PIC 16F876. In elettronica digitale il microcontrollore è un dispositivo elettronico integrato
111 Microcontrollori L ultima parte del corso prevede un approfondimento sui microprocessori, in particolare sul PIC 16F876. In elettronica digitale il microcontrollore è un dispositivo elettronico integrato
Architettura di un sistema di calcolo
 Richiami sulla struttura dei sistemi di calcolo Gestione delle Interruzioni Gestione della comunicazione fra processore e dispositivi periferici Gerarchia di memoria Protezione. 2.1 Architettura di un
Richiami sulla struttura dei sistemi di calcolo Gestione delle Interruzioni Gestione della comunicazione fra processore e dispositivi periferici Gerarchia di memoria Protezione. 2.1 Architettura di un
Gestione Risorse Umane Web
 La gestione delle risorse umane Gestione Risorse Umane Web Generazione attestati di partecipazione ai corsi di formazione (Versione V03) Premessa... 2 Configurazione del sistema... 3 Estrattore dati...
La gestione delle risorse umane Gestione Risorse Umane Web Generazione attestati di partecipazione ai corsi di formazione (Versione V03) Premessa... 2 Configurazione del sistema... 3 Estrattore dati...
Esercizi di verifica del debito formativo:
 Esercizi di verifica del debito formativo: Disegnare il diagramma e scrivere la tabella delle transizioni di stato degli automi sequenziali a stati finiti che rappresentano il comportamento dei seguenti
Esercizi di verifica del debito formativo: Disegnare il diagramma e scrivere la tabella delle transizioni di stato degli automi sequenziali a stati finiti che rappresentano il comportamento dei seguenti
I microcontrollori. In sostanza i pic hanno le seguenti caratteristiche:
 I microcontrollori Con il termine di microcontrollori si intende un sistema integrato simile ad un microprocessore ma contente su un unico chip oltre la CPU, anche la memoria RAM, memoria dati, memoria
I microcontrollori Con il termine di microcontrollori si intende un sistema integrato simile ad un microprocessore ma contente su un unico chip oltre la CPU, anche la memoria RAM, memoria dati, memoria
Introduzione. Classificazione di Flynn... 2 Macchine a pipeline... 3 Macchine vettoriali e Array Processor... 4 Macchine MIMD... 6
 Appunti di Calcolatori Elettronici Esecuzione di istruzioni in parallelo Introduzione... 1 Classificazione di Flynn... 2 Macchine a pipeline... 3 Macchine vettoriali e Array Processor... 4 Macchine MIMD...
Appunti di Calcolatori Elettronici Esecuzione di istruzioni in parallelo Introduzione... 1 Classificazione di Flynn... 2 Macchine a pipeline... 3 Macchine vettoriali e Array Processor... 4 Macchine MIMD...
STRUTTURE DEI SISTEMI DI CALCOLO
 STRUTTURE DEI SISTEMI DI CALCOLO 2.1 Strutture dei sistemi di calcolo Funzionamento Struttura dell I/O Struttura della memoria Gerarchia delle memorie Protezione Hardware Architettura di un generico sistema
STRUTTURE DEI SISTEMI DI CALCOLO 2.1 Strutture dei sistemi di calcolo Funzionamento Struttura dell I/O Struttura della memoria Gerarchia delle memorie Protezione Hardware Architettura di un generico sistema
DMA Accesso Diretto alla Memoria
 Testo di rif.to: [Congiu] - 8.1-8.3 (pg. 241 250) 08.a DMA Accesso Diretto alla Memoria Motivazioni Organizzazione dei trasferimenti DMA Arbitraggio del bus di memoria Trasferimento di un blocco di dati
Testo di rif.to: [Congiu] - 8.1-8.3 (pg. 241 250) 08.a DMA Accesso Diretto alla Memoria Motivazioni Organizzazione dei trasferimenti DMA Arbitraggio del bus di memoria Trasferimento di un blocco di dati
Il µcontrollore PIC 16F84
 Il µcontrollore PIC 16F84 Microchip Tecnology D. Ch. 1 Il grande successo dei microcontrollori ha indotto tutte le grandi case costrutrici di semiconduttori come la Intel, la Philips Semiconductors, la
Il µcontrollore PIC 16F84 Microchip Tecnology D. Ch. 1 Il grande successo dei microcontrollori ha indotto tutte le grandi case costrutrici di semiconduttori come la Intel, la Philips Semiconductors, la
Capitolo Quarto...2 Le direttive di assemblaggio di ASM 68000...2 Premessa...2 1. Program Location Counter e direttiva ORG...2 2.
 Capitolo Quarto...2 Le direttive di assemblaggio di ASM 68000...2 Premessa...2 1. Program Location Counter e direttiva ORG...2 2. Dichiarazione di dati: le direttive DS e DC...3 2.1 Direttiva DS...3 2.2
Capitolo Quarto...2 Le direttive di assemblaggio di ASM 68000...2 Premessa...2 1. Program Location Counter e direttiva ORG...2 2. Dichiarazione di dati: le direttive DS e DC...3 2.1 Direttiva DS...3 2.2
File, Modifica, Visualizza, Strumenti, Messaggio
 Guida installare account in Outlook Express Introduzione Questa guida riguarda di sicuro uno dei programmi maggiormente usati oggi: il client di posta elettronica. Tutti, ormai, siamo abituati a ricevere
Guida installare account in Outlook Express Introduzione Questa guida riguarda di sicuro uno dei programmi maggiormente usati oggi: il client di posta elettronica. Tutti, ormai, siamo abituati a ricevere
Corso di Sistemi di Elaborazione delle informazioni
 Corso di Sistemi di Elaborazione delle informazioni Sistemi Operativi Francesco Fontanella Complessità del Software Software applicativo Software di sistema Sistema Operativo Hardware 2 La struttura del
Corso di Sistemi di Elaborazione delle informazioni Sistemi Operativi Francesco Fontanella Complessità del Software Software applicativo Software di sistema Sistema Operativo Hardware 2 La struttura del
Introduzione all'architettura dei Calcolatori
 Introduzione all'architettura dei Calcolatori Introduzione Che cos è un calcolatore? Come funziona un calcolatore? è possibile rispondere a queste domande in molti modi, ciascuno relativo a un diverso
Introduzione all'architettura dei Calcolatori Introduzione Che cos è un calcolatore? Come funziona un calcolatore? è possibile rispondere a queste domande in molti modi, ciascuno relativo a un diverso
Introduzione. Corso di Informatica Applicata. Università degli studi di Cassino
 Università degli studi di Cassino Corso di Laurea in Ingegneria della Produzione Industriale Corso di Informatica Applicata Introduzione Ing. Saverio De Vito e-mail: saverio.devito@portici.enea.it Tel.:
Università degli studi di Cassino Corso di Laurea in Ingegneria della Produzione Industriale Corso di Informatica Applicata Introduzione Ing. Saverio De Vito e-mail: saverio.devito@portici.enea.it Tel.:
Lezione n.19 Processori RISC e CISC
 Lezione n.19 Processori RISC e CISC 1 Processori RISC e Superscalari Motivazioni che hanno portato alla realizzazione di queste architetture Sommario: Confronto tra le architetture CISC e RISC Prestazioni
Lezione n.19 Processori RISC e CISC 1 Processori RISC e Superscalari Motivazioni che hanno portato alla realizzazione di queste architetture Sommario: Confronto tra le architetture CISC e RISC Prestazioni
FONDAMENTI di INFORMATICA L. Mezzalira
 FONDAMENTI di INFORMATICA L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software
FONDAMENTI di INFORMATICA L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software
Ciclo di Istruzione. Ciclo di Istruzione. Controllo. Ciclo di Istruzione (diagramma di flusso) Lezione 5 e 6
 Lezione 5 e 6") Ciclo di Istruzione Può essere suddiviso in 4 tipi di sequenze di microoperazioni (cioè attività di calcolo aritmetico/logico, trasferimento e memorizzazione dei dati), non tutte necessariamente da realizzare
Ciclo di Istruzione Può essere suddiviso in 4 tipi di sequenze di microoperazioni (cioè attività di calcolo aritmetico/logico, trasferimento e memorizzazione dei dati), non tutte necessariamente da realizzare
Verificare il funzionamento delle memorie RAM Saper effettuare misure di collaudo. Dip switch Pulsante n.a. Octal tri-state buffer IC2 = MM 2114
 SCH 31 Scrittura/lettura RAM Obiettivi Strumenti e componenti Verificare il funzionamento delle memorie RAM Saper effettuare misure di collaudo S1 S5 P1 IC1 = 74LS244 Dip switch Pulsante n.a. Octal tri-state
SCH 31 Scrittura/lettura RAM Obiettivi Strumenti e componenti Verificare il funzionamento delle memorie RAM Saper effettuare misure di collaudo S1 S5 P1 IC1 = 74LS244 Dip switch Pulsante n.a. Octal tri-state
Corso di Calcolatori Elettronici I A.A. 2010-2011 Il processore Lezione 18
 Corso di Calcolatori Elettronici I A.A. 2010-2011 Il processore Lezione 18 Università degli Studi di Napoli Federico II Facoltà di Ingegneria Calcolatore: sottosistemi Processore o CPU (Central Processing
Corso di Calcolatori Elettronici I A.A. 2010-2011 Il processore Lezione 18 Università degli Studi di Napoli Federico II Facoltà di Ingegneria Calcolatore: sottosistemi Processore o CPU (Central Processing
Modulo. Programmiamo in Pascal. Unità didattiche COSA IMPAREREMO...
 Modulo A Programmiamo in Pascal Unità didattiche 1. Installiamo il Dev-Pascal 2. Il programma e le variabili 3. Input dei dati 4. Utilizziamo gli operatori matematici e commentiamo il codice COSA IMPAREREMO...
Modulo A Programmiamo in Pascal Unità didattiche 1. Installiamo il Dev-Pascal 2. Il programma e le variabili 3. Input dei dati 4. Utilizziamo gli operatori matematici e commentiamo il codice COSA IMPAREREMO...
IRSplit. Istruzioni d uso 07/10-01 PC
 3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
Manuale d uso per la raccolta: Monitoraggio del servizio di Maggior Tutela
 Manuale d uso per la raccolta: Monitoraggio del servizio di Maggior Tutela Pagina 1 di 9 Indice generale 1 Accesso alla raccolta... 3 2 Il pannello di controllo della raccolta e attivazione delle maschere...
Manuale d uso per la raccolta: Monitoraggio del servizio di Maggior Tutela Pagina 1 di 9 Indice generale 1 Accesso alla raccolta... 3 2 Il pannello di controllo della raccolta e attivazione delle maschere...
5-1 FILE: CREAZIONE NUOVO DOCUMENTO
 Capittol lo 5 File 5-1 FILE: CREAZIONE NUOVO DOCUMENTO In Word è possibile creare documenti completamente nuovi oppure risparmiare tempo utilizzando autocomposizioni o modelli, che consentono di creare
Capittol lo 5 File 5-1 FILE: CREAZIONE NUOVO DOCUMENTO In Word è possibile creare documenti completamente nuovi oppure risparmiare tempo utilizzando autocomposizioni o modelli, che consentono di creare
Struttura del calcolatore
 Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Fasi di creazione di un programma
 Fasi di creazione di un programma 1. Studio Preliminare 2. Analisi del Sistema 6. Manutenzione e Test 3. Progettazione 5. Implementazione 4. Sviluppo 41 Sviluppo di programmi Per la costruzione di un programma
Fasi di creazione di un programma 1. Studio Preliminare 2. Analisi del Sistema 6. Manutenzione e Test 3. Progettazione 5. Implementazione 4. Sviluppo 41 Sviluppo di programmi Per la costruzione di un programma
Testi di Esercizi e Quesiti 1
 Architettura degli Elaboratori, 2009-2010 Testi di Esercizi e Quesiti 1 1. Una rete logica ha quattro variabili booleane di ingresso a 0, a 1, b 0, b 1 e due variabili booleane di uscita z 0, z 1. La specifica
Architettura degli Elaboratori, 2009-2010 Testi di Esercizi e Quesiti 1 1. Una rete logica ha quattro variabili booleane di ingresso a 0, a 1, b 0, b 1 e due variabili booleane di uscita z 0, z 1. La specifica
L amministratore di dominio
 L amministratore di dominio Netbuilder consente ai suoi clienti di gestire autonomamente le caselle del proprio dominio nel rispetto dei vincoli contrattuali. Ciò è reso possibile dall esistenza di un
L amministratore di dominio Netbuilder consente ai suoi clienti di gestire autonomamente le caselle del proprio dominio nel rispetto dei vincoli contrattuali. Ciò è reso possibile dall esistenza di un
I Thread. I Thread. I due processi dovrebbero lavorare sullo stesso testo
 I Thread 1 Consideriamo due processi che devono lavorare sugli stessi dati. Come possono fare, se ogni processo ha la propria area dati (ossia, gli spazi di indirizzamento dei due processi sono separati)?
I Thread 1 Consideriamo due processi che devono lavorare sugli stessi dati. Come possono fare, se ogni processo ha la propria area dati (ossia, gli spazi di indirizzamento dei due processi sono separati)?
Una volta inseriti tutti i parametri necessari premere.
 Esercitazione n 1 Questa esercitazione guidata ha lo scopo di mostrare come creare un semplice progetto per pilotare l accensione e lo spegnimento di un led attraverso uno degli switch della XSA board.
Esercitazione n 1 Questa esercitazione guidata ha lo scopo di mostrare come creare un semplice progetto per pilotare l accensione e lo spegnimento di un led attraverso uno degli switch della XSA board.
Architettura della CPU e linguaggio assembly Corso di Abilità Informatiche Laurea in Fisica. prof. ing. Corrado Santoro
 Architettura della CPU e linguaggio assembly Corso di Abilità Informatiche Laurea in Fisica prof. ing. Corrado Santoro Schema a blocchi di una CPU Arithmetic Logic Unit Control Unit Register File BUS Control
Architettura della CPU e linguaggio assembly Corso di Abilità Informatiche Laurea in Fisica prof. ing. Corrado Santoro Schema a blocchi di una CPU Arithmetic Logic Unit Control Unit Register File BUS Control
Il memory manager. Gestione della memoria centrale
 Il memory manager Gestione della memoria centrale La memoria La memoria RAM è un vettore molto grande di WORD cioè celle elementari a 16bit, 32bit, 64bit (2Byte, 4Byte, 8Byte) o altre misure a seconda
Il memory manager Gestione della memoria centrale La memoria La memoria RAM è un vettore molto grande di WORD cioè celle elementari a 16bit, 32bit, 64bit (2Byte, 4Byte, 8Byte) o altre misure a seconda
Calcolatori Elettronici. La memoria gerarchica La memoria virtuale
 Calcolatori Elettronici La memoria gerarchica La memoria virtuale Come usare la memoria secondaria oltre che per conservare permanentemente dati e programmi Idea Tenere parte del codice in mem princ e
Calcolatori Elettronici La memoria gerarchica La memoria virtuale Come usare la memoria secondaria oltre che per conservare permanentemente dati e programmi Idea Tenere parte del codice in mem princ e
INFORMATICA 1 L. Mezzalira
 INFORMATICA 1 L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software del modello
INFORMATICA 1 L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software del modello
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
Memorie ROM (Read Only Memory)
") Memorie ROM (Read Only Memory) Considerando la prima forma canonica, la realizzazione di qualsiasi funzione di m variabili richiede un numero di porte AND pari al numero dei suoi mintermini e di prolungare
Memorie ROM (Read Only Memory) Considerando la prima forma canonica, la realizzazione di qualsiasi funzione di m variabili richiede un numero di porte AND pari al numero dei suoi mintermini e di prolungare
Manuale Amministratore Legalmail Enterprise. Manuale ad uso degli Amministratori del Servizio Legalmail Enterprise
 Manuale Amministratore Legalmail Enterprise Manuale ad uso degli Amministratori del Servizio Legalmail Enterprise Pagina 2 di 16 Manuale Amministratore Legalmail Enterprise Introduzione a Legalmail Enterprise...3
Manuale Amministratore Legalmail Enterprise Manuale ad uso degli Amministratori del Servizio Legalmail Enterprise Pagina 2 di 16 Manuale Amministratore Legalmail Enterprise Introduzione a Legalmail Enterprise...3
Architettura di un calcolatore
 2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
Esercizi per il recupero del debito formativo:
 ANNO SCOLASTICO 2005/2006 CLASSE 3 ISC Esercizi per il recupero del debito formativo: Disegnare il diagramma e scrivere la matrice delle transizioni di stato degli automi a stati finiti che rappresentano
ANNO SCOLASTICO 2005/2006 CLASSE 3 ISC Esercizi per il recupero del debito formativo: Disegnare il diagramma e scrivere la matrice delle transizioni di stato degli automi a stati finiti che rappresentano
C. P. U. MEMORIA CENTRALE
 C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
Dispense di Informatica per l ITG Valadier
 La notazione binaria Dispense di Informatica per l ITG Valadier Le informazioni dentro il computer All interno di un calcolatore tutte le informazioni sono memorizzate sottoforma di lunghe sequenze di
La notazione binaria Dispense di Informatica per l ITG Valadier Le informazioni dentro il computer All interno di un calcolatore tutte le informazioni sono memorizzate sottoforma di lunghe sequenze di
La memoria centrale (RAM)
") La memoria centrale (RAM) Mantiene al proprio interno i dati e le istruzioni dei programmi in esecuzione Memoria ad accesso casuale Tecnologia elettronica: Veloce ma volatile e costosa Due eccezioni R.O.M.
La memoria centrale (RAM) Mantiene al proprio interno i dati e le istruzioni dei programmi in esecuzione Memoria ad accesso casuale Tecnologia elettronica: Veloce ma volatile e costosa Due eccezioni R.O.M.
APP RIO8 APP PER LA CONFIGURAZIONE GUIDA PER L UTENTE. Omniabit s.r.l. Via Val Camonica 11, Milan, Italy http://www.omniabit.com support@omniabit.
 APP RIO8 APP PER LA CONFIGURAZIONE GUIDA PER L UTENTE 2 APP RIO8 Premessa L applicazione RIO8 è una App mobile, compatibile con i sistemi operativi Android ed ios, ideata per la configurazione del prodotto
APP RIO8 APP PER LA CONFIGURAZIONE GUIDA PER L UTENTE 2 APP RIO8 Premessa L applicazione RIO8 è una App mobile, compatibile con i sistemi operativi Android ed ios, ideata per la configurazione del prodotto
Quinto Homework. Indicare il tempo necessario all'esecuzione del programma in caso di avvio e ritiro fuori ordine.
 Quinto Homework 1) Si vuole progettare una cache a mappatura diretta per un sistema a 32 bit per una memoria da 2 GB (quindi sono solo 31 i bit utili per gli indirizzi) e blocchi di 64 byte. Rispondere
Quinto Homework 1) Si vuole progettare una cache a mappatura diretta per un sistema a 32 bit per una memoria da 2 GB (quindi sono solo 31 i bit utili per gli indirizzi) e blocchi di 64 byte. Rispondere
La microarchitettura. Didattica della strumentazione digitale e sistemi a microprocessore anno accademico 2006 2007 pagina 1
 La microarchitettura. anno accademico 2006 2007 pagina 1 Integer Java virtual machine Ogni microprocessore può avere una microarchitettura diversa, ma la modalità di funzionamento per certi aspetti è generale.
La microarchitettura. anno accademico 2006 2007 pagina 1 Integer Java virtual machine Ogni microprocessore può avere una microarchitettura diversa, ma la modalità di funzionamento per certi aspetti è generale.
Esempio di moltiplicazione come somma e spostamento
 Esempio di moltiplicazione come somma e spostamento Implementare una moltiplicazione coinvolge algoritmi di shift e somma Istruzioni di Shift:movimento di bit: ROL Rd ROR Rd LSL Rd LSR ASR Rd Rd 22 x 35
Esempio di moltiplicazione come somma e spostamento Implementare una moltiplicazione coinvolge algoritmi di shift e somma Istruzioni di Shift:movimento di bit: ROL Rd ROR Rd LSL Rd LSR ASR Rd Rd 22 x 35
Sistema operativo: Gestione della memoria
 Dipartimento di Elettronica ed Informazione Politecnico di Milano Informatica e CAD (c.i.) - ICA Prof. Pierluigi Plebani A.A. 2008/2009 Sistema operativo: Gestione della memoria La presente dispensa e
Dipartimento di Elettronica ed Informazione Politecnico di Milano Informatica e CAD (c.i.) - ICA Prof. Pierluigi Plebani A.A. 2008/2009 Sistema operativo: Gestione della memoria La presente dispensa e
Laboratorio di Architettura degli Elaboratori - A.A. 2012/13
 Università di Udine - Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Laboratorio di Architettura degli Elaboratori - A.A. 2012/13 Circuiti logici, lezione 1 Sintetizzare
Università di Udine - Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Laboratorio di Architettura degli Elaboratori - A.A. 2012/13 Circuiti logici, lezione 1 Sintetizzare
Corso PLC - Manuale Pratico 1
 Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
Architettura di un calcolatore: introduzione
 Corso di Calcolatori Elettronici I Architettura di un calcolatore: introduzione Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie
Corso di Calcolatori Elettronici I Architettura di un calcolatore: introduzione Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie
Esame di INFORMATICA
 Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Programmazione del microcontrollore PIC 16F84
 Programmazione del microcontrollore PIC 16F84 2 Indice Capitolo 1: Set di istruzioni del PIC 16F84 1.1 Descrizione sintetica 1.2 Simbologia adottata 1.3 Sintassi 1.4 Descrizione completa Capitolo 2: Variabili,
Programmazione del microcontrollore PIC 16F84 2 Indice Capitolo 1: Set di istruzioni del PIC 16F84 1.1 Descrizione sintetica 1.2 Simbologia adottata 1.3 Sintassi 1.4 Descrizione completa Capitolo 2: Variabili,
MODELLO CLIENT/SERVER. Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it
 MODELLO CLIENT/SERVER Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it POSSIBILI STRUTTURE DEL SISTEMA INFORMATIVO La struttura di un sistema informativo
MODELLO CLIENT/SERVER Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it POSSIBILI STRUTTURE DEL SISTEMA INFORMATIVO La struttura di un sistema informativo
Consiglio regionale della Toscana. Regole per il corretto funzionamento della posta elettronica
 Consiglio regionale della Toscana Regole per il corretto funzionamento della posta elettronica A cura dell Ufficio Informatica Maggio 2006 Indice 1. Regole di utilizzo della posta elettronica... 3 2. Controllo
Consiglio regionale della Toscana Regole per il corretto funzionamento della posta elettronica A cura dell Ufficio Informatica Maggio 2006 Indice 1. Regole di utilizzo della posta elettronica... 3 2. Controllo
Architettura hw. La memoria e la cpu
 Architettura hw La memoria e la cpu La memoria centrale e la CPU Bus controllo Bus indirizzi Bus dati Bus di collegamento con la cpu indirizzi controllo dati Bus Indirizzi 11 Bus controllo Leggi/scrivi
Architettura hw La memoria e la cpu La memoria centrale e la CPU Bus controllo Bus indirizzi Bus dati Bus di collegamento con la cpu indirizzi controllo dati Bus Indirizzi 11 Bus controllo Leggi/scrivi
Il Sistema Operativo. C. Marrocco. Università degli Studi di Cassino
 Il Sistema Operativo Il Sistema Operativo è uno strato software che: opera direttamente sull hardware; isola dai dettagli dell architettura hardware; fornisce un insieme di funzionalità di alto livello.
Il Sistema Operativo Il Sistema Operativo è uno strato software che: opera direttamente sull hardware; isola dai dettagli dell architettura hardware; fornisce un insieme di funzionalità di alto livello.
Access. Microsoft Access. Aprire Access. Aprire Access. Aprire un database. Creare un nuovo database
 Microsoft Access Introduzione alle basi di dati Access E un programma di gestione di database (DBMS) Access offre: un supporto transazionale limitato Meccanismi di sicurezza, protezione di dati e gestione
Microsoft Access Introduzione alle basi di dati Access E un programma di gestione di database (DBMS) Access offre: un supporto transazionale limitato Meccanismi di sicurezza, protezione di dati e gestione
Manuale Terminal Manager 2.0
 Manuale Terminal Manager 2.0 CREAZIONE / MODIFICA / CANCELLAZIONE TERMINALI Tramite il pulsante NUOVO possiamo aggiungere un terminale alla lista del nostro impianto. Comparirà una finestra che permette
Manuale Terminal Manager 2.0 CREAZIONE / MODIFICA / CANCELLAZIONE TERMINALI Tramite il pulsante NUOVO possiamo aggiungere un terminale alla lista del nostro impianto. Comparirà una finestra che permette
Classe 3a INF - Esecuzione di un interrupt: ricostruzione delle operazioni al calcolatore con Turbo Debugger
 Classe 3a INF - Esecuzione di un interrupt: ricostruzione delle operazioni al calcolatore con Turbo Debugger Turbo debugger è un potente strumento di sviluppo pensato, anni fa, come complemento agli strumenti
Classe 3a INF - Esecuzione di un interrupt: ricostruzione delle operazioni al calcolatore con Turbo Debugger Turbo debugger è un potente strumento di sviluppo pensato, anni fa, come complemento agli strumenti
Coordinazione Distribuita
 Coordinazione Distribuita Ordinamento degli eventi Mutua esclusione Atomicità Controllo della Concorrenza 21.1 Introduzione Tutte le questioni relative alla concorrenza che si incontrano in sistemi centralizzati,
Coordinazione Distribuita Ordinamento degli eventi Mutua esclusione Atomicità Controllo della Concorrenza 21.1 Introduzione Tutte le questioni relative alla concorrenza che si incontrano in sistemi centralizzati,
Figura 1 Le Icone dei file di Excel con e senza macro.
 18 Le macro Le macro rappresentano una soluzione interessante per automatizzare e velocizzare l esecuzione di operazioni ripetitive. Le macro, di fatto, sono porzioni di codice VBA (Visual Basic for Applications)
18 Le macro Le macro rappresentano una soluzione interessante per automatizzare e velocizzare l esecuzione di operazioni ripetitive. Le macro, di fatto, sono porzioni di codice VBA (Visual Basic for Applications)
INSTALLAZIONE NUOVO CLIENT TUTTOTEL (04 Novembre 2014)
") INSTALLAZIONE NUOVO CLIENT TUTTOTEL (04 Novembre 2014) Se la Suite risulta già stata installata e quindi sono già presenti le configurazioni di seguito indicate, si prega di andare direttamente alla fine
INSTALLAZIONE NUOVO CLIENT TUTTOTEL (04 Novembre 2014) Se la Suite risulta già stata installata e quindi sono già presenti le configurazioni di seguito indicate, si prega di andare direttamente alla fine
L architettura di riferimento
 Architetture degli elaboratori e delle reti Lezione 10 L architettura di riferimento Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 10 1/27
Architetture degli elaboratori e delle reti Lezione 10 L architettura di riferimento Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 10 1/27
Sottosistema di Ingresso/Uscita (I/O)
") Corso di Calcolatori Elettronici I A.A. 2013-2014 Sottosistema di Ingresso/Uscita (I/O) ing. Alessandro Cilardo Corso di Laurea in Ingegneria Biomedica allievi J-Z Calcolatore: sottosistemi Processore
Corso di Calcolatori Elettronici I A.A. 2013-2014 Sottosistema di Ingresso/Uscita (I/O) ing. Alessandro Cilardo Corso di Laurea in Ingegneria Biomedica allievi J-Z Calcolatore: sottosistemi Processore
Introduzione. Corso di Informatica Applicata. Università degli studi di Cassino
 Università degli studi di Cassino Corso di Laurea in Ingegneria della Produzione Industriale Corso di Informatica Applicata Introduzione Ing. Saverio De Vito e-mail: saverio.devito@portici.enea.it Tel.:
Università degli studi di Cassino Corso di Laurea in Ingegneria della Produzione Industriale Corso di Informatica Applicata Introduzione Ing. Saverio De Vito e-mail: saverio.devito@portici.enea.it Tel.:
OSCILLATORI AL QUARZO: CONTASECONDI
 ... OSCILLATORI AL QUARZO: CONTASECONDI di Maurizio Del Corso m.delcorso@farelettronica.com Come può un cristallo di quarzo oscillare ad una determinata frequenza? Quale spiegazione fisica c è dietro a
... OSCILLATORI AL QUARZO: CONTASECONDI di Maurizio Del Corso m.delcorso@farelettronica.com Come può un cristallo di quarzo oscillare ad una determinata frequenza? Quale spiegazione fisica c è dietro a