Analisi del volto. Introduzione. Localizzazione
|
|
|
- Giuditta Rocca
- 8 anni fa
- Visualizzazioni
Transcript
1 Analisi del volto Localizzazione Annalisa Franco Dario aio 2 Introduzione Problema: data una singola immagine o una sequenza video rilevare la presenza di uno o più volti e localizzarne la posizione all interno dell immagine. È necessaria l indipendenza rispetto a: posizione, orientazione, scala, espressione del volto; fattori esterni quali l illuminazione o la presenza di uno sfondo complesso.

2 3 Quante facce vedete? 4 Risultati di algoritmi allo stato dell arte Feraud et al., 2001 Sung et al., 1998 Yow et al., 1997 aio et al., 2000 Rowley et al., 1998 Schneiderman et al., 2000 Garcia et al., 1999 Lew et al., 1996

3 5 Approcci alla localizzazione (1) Tecniche feature-based Usano esplicitamente la conoscenza dell aspetto del volto, caratterizzato da un insieme di feature di basso livello: Low-level analysis: proprietà dei pixel Edges Colore della pelle Feature analysis: informazioni sulla geometria del volto Constellation Feature searching Template matching: modello standard di un volto definito manualmente o descritto da una funzione Correlazione Snakes Active Shape odels Approcci alla localizzazione (2) Tecniche image-based Affrontano il problema della localizzazione del volto come un generico problema di pattern recognition; L obiettivo è imparare a riconoscere un immagine di un volto sulla base di alcuni esempi di training. Subspace methods Neural networks 6 Support Vector achine Hidden arkov odel

. Face Image Eye ap outh ap Boundary ap R.L. Hsu,.A. ottaleb, A.K.")

4 7 Localizzazione in immagini a colori Algoritmo: Compensazione della luce Localizzazione basata sul colore della pelle Localizzazione delle principali caratteristiche del volto (occhi, bocca, contorno del viso). Face Image Eye ap outh ap Boundary ap R.L. Hsu,.A. ottaleb, A.K. Jain, Face Detection in Color Images, IEEE Transactions on Pattern Analysis and achine Intelligence, vol. 24, no. 5, pp , L algoritmo di localizzazione 8 Lighting Compensation Color Space Transformation Input Image Skin Color Detection Variance-based Segmentation Connected Component & Grouping Eye/ outh Detection Face Localization Face Boundary Detection Verifying/ Weighting Eyes-outh Triangles Facial Feature Detection Output Image

5 9 Spazio colorimetrico Spazio RGB (Red-Green-Blue) Spazio Luma-Chroma(YCbCr) 10 appa degli occhi (1) Dilation & asking Color Y EyeapL Eye map * AND Cr2 Cb2 EyeapC Dilated & masked

6 11 appa degli occhi (2) L algoritmo costruisce due diverse mappe degli occhi (crominanza e luminanza ). Crominanza: la regione circostante gli occhi è caratterizzata da valori elevati di C b e bassi di C r : ( ) ( ) 1 2 ~ C b EyeapC = Cb + C 2 ~ r + Cr = 255 C r 3 Cr Luminanza: gli occhi contengono solitamente sia regioni chiare sia zone più scure; opportuni operatori morfologici possono evidenziare tali caratteristiche. Y( x, y) gσ ( x, y) EyeapL = Y x, y g x, y + ( ) ( ) 1 La mappa relativa alla crominanza è sottoposta a equalizzazione dell istogramma e poi combinata con la mappa risultante dalla luminanza (AND). La mappa risultante dalla combinazione è poi sottoposta a dilatazione, mascherata e normalizzata per eliminare le altre regioni del volto ed evidenziare gli occhi. σ appa della bocca (1) La bocca è caratterizzata da una preponderanza della componente rossa rispetto a quella blu. 12 Color Cr/Cb Cr 2 outh map Dilated & masked - Difference * AND
 gσ ( x, y) EyeapL = Y x, y g x, y + ( ) ( ) 1 La mappa relativa alla crominanza è sottoposta a equalizzazione dell istogramma e poi combinata con la mappa risultante dalla luminanza (AND).")
7 13 appa della bocca (2) Nella regione della bocca la componente C r è maggiore di C b ; inoltre la risposta a C r /C b è bassa, mentre la risposta a C r2 è elevata. outhap 2 r 2 ( C C C ) 2 = C η r r b η = C n ( x, y) 1 ( Cr n x, y) FG r FG ( x, y) ( x, y) C ( x, y) b 2 n è il numero di pixel contenuti nella maschera che delimita il volto (FG) appa del contorno del volto Si analizzano tutti i triangoli occhi bocca dati dalla combinazione di due occhi e una bocca candidati. Ogni triangolo viene controllato verificando: Variazioni nel componente luma e media del gradiente delle orientazioni; Geometria e orientazione del triangolo; Presenza di un contorno del volto attorno al triangolo. A tutti i triangoli che verificano le condizioni precedenti è assegnato uno score e viene infine selezionato il triangolo che ottiene lo score maggiore (se superiore a una soglia). 14

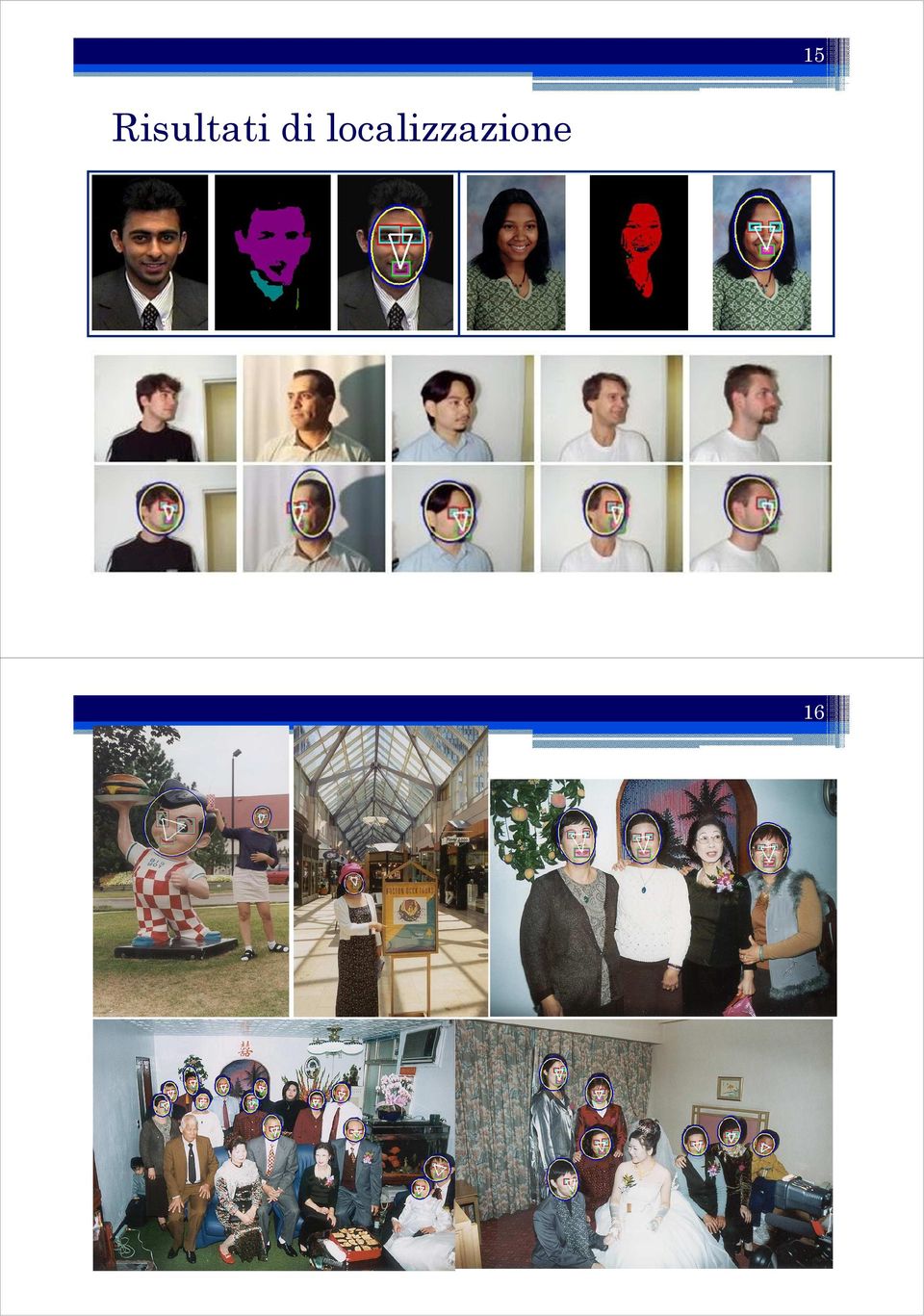
8 15 Risultati di localizzazione 16
9 17 18 Localizzazione su immagini a livelli di grigio Immagine delle orientazioni locali (multi-risoluzione) Directional Image computation Approximate location Directional Image refining Trasformata Hough sulle orientazioni (spazio Hough) Template atching (su orientazioni) D. aio, D. altoni, Real-time face location on gray-scale static images, Pattern Recognition, vol. 33, no. 9, pp , Fine location & face verification

10 19 Localizzazione approssimata Ricerca di blob ellittici sull immagine delle orientazioni. Un generico elemento d D σ ϕ (x 0,y 0 ) ❶ Calcolo dell immagine D delle orientazioni ❷ Generalized Hough Transform (GHT) usando settori di corone ellittiche come template. ❸ Ricerca di massimi in un array di accumulatori 20 Localizzazione approssimata con GHT Data un immagine delle orientazioni D e un array di accumulatori A: (x 2,y 2 ) a (x 0,y 0 ) d θ φ ϕ b C (x 1,y 1 ) Reset A ; element d D { Τ = compute template( (x 0,y 0 ), ϕ ); } pixel (x,y) T { A[x,y] = A[x,y] + σ weight T (x,y); } Per ogni elemento d D si calcola un differente template T al fine di aggiornare l array di accumulatori A tenendo conto di: un intervallo di variazione : a min a a max, b min b b max un errore angolare θ I punti (x 1, y 1 ) e (x 2, y 2 ) corrispondono ai centri delle 2 sole ellissi di semiassi (a, b) il cui bordo è tangente a d nel punto (x 0, y 0 ). Essendo interessati a tutte le ellissi nel range (a min...a max, b min...b max ) è necessario considerare come centri tutti i punti giacenti sui 2 segmenti determinati dall'intersezione della retta passante per (x 1, y 1 ) e (x 2, y 2 ) con la corona C. Assumendo un errore massimo angolare si determina il luogo geometrico dei possibili centri di ellissi in grado di generare in (x 0, y 0 ) un vettore d di direzione ϕ.
 Reset A ; element d D { Τ = compute template( (x 0,y 0 ), ϕ ); } pixel (x,y) T { A[x,y] = A[x,y] + σ weight T (x,y); } Per ogni elemento d D si calcola un differente template T al fine di")
11 21 Implementazione efficiente Discretizzazione delle orientazioni degli elementi in D (es. 256 valori) Pre-Calcolo dei template T; usando coordinate relative rispetto al centro dell ellisse, il number dci differenti template corrisponde al numero di differenti orientations template pixels (20,23) (20,25) (18,22) (15,26) (13,27) Discretizzazione dell accumulatore A 22 Risultato della localizzazione... un errore
 (20,25) (18,22) (15,26) (13,27).")
12 23 Raffinamento della localizzazione Un passo di localizzazione fine è necessario per: scartare i massimi di Hough che pur essendo ellissi non sono volti localizzare più esattamente il centro Loc. appros. Loc. fine (Hough) (Template atching) miglior candidato VOLTO FALSO ALLARE Il primo stadio trasmette al secondo una posizione alla volta (la più probabile); il secondo stadio continua a richiedere nuove posizioni al primo stadio fintanto che non è individuato un volto valido oppure non sono esaurite le posizioni candidate. Un esempio di template direzionali usati per il template matching in un intorno delle posizioni identificate dal primo stadio (Hough). L immagine delle orientazioni è localmente ricampionata a maggiore risoluzione per ottenere una migliore accuratezza. aschere parametriche F è una maschera, definita in modo parametrico rispetto ad a e b, che assume valori non nulli (orientazione + modulo) solo in corrispondenza dei nodi di una griglia della medesima granularità di D. a Inoltre, solo i nodi di F che appartengono alle 5 regioni grigie hanno moduli non nulli: b 0.05 b 0.13 b 0.07 b 0.05 b 0.19 a 0.7 a 0.42 a 1.67 a 0.42 a 0.32 b 0.57 b 0.13 b F b bocca, occhi e sopracciglia orizzontale naso verticale bordo tangente all ellisse Ogni regione ha un peso globale unifomemente distribuito tra i suoi elementi Discretizzando a e b nel range (a min...a max, b min...b max ) è possibile pre-calcolare un insieme di maschere F ={ F 1, F 2,..F m }, in ciascuna della quali la posizione dei nodi è espressa in coordinate relative rispetto al centro, che possono essere efficientemente utilizzate per calcolare il grado di correlazione in qualsiasi posizione dell'immagine delle orientazioni.

13 25 Esempi di localizzazione fine 26 Il localizzatore di Viola e Jones (1) La proposta di Paul Viola e ichael Jones, introdotta in generale per la localizzazione di oggetti, è stata applicata con successo all individuazione di volti. Prevede di creare un classificatore che inizialmente è addestrato mediante multiple istanze della classe da individuare (esempi positivi), e varie istanze di esempi negativi, ovvero immagini che non contengono alcun oggetto della classe in esame. Durante il training sono estratte diverse caratteristiche dagli esempi e selezionate quelle che risultano particolarmente discriminanti. Questo tipo di informazione è racchiusa nei parametri del modello statistico. Se il classificatore addestrato non trova un oggetto che invece è presente (miss) oppure ne indica erroneamente la presenza (false alarm), si può ricalibrare il suo addestramento aggiungendo gli esempi corrispondenti (positivi o negativi) al training set. P. Viola,. J. Jones, Rapid Object Detection using a Boosted Cascade of Simple Features, in proc. IEEE International Conference on Computer Vision and Pattern Recognition, vol. 1, pp , 2001.


14 27 Il localizzatore di Viola e Jones (2) etodo di tipo imagebased. Usa un classificatore in grado di associare un pattern in input a una delle due classi volto/non volto: Le immagini dei volti hanno proprietà comuni; Le immagini che non rappresentano volti sono estremamente irregolari. Paul Viola, ichael Jones, Robust Real-Time Face Detection, International Journal of Computer Vision 57(2), , Il localizzatore di Viola e Jones (3) I tre più importanti contributi dell approccio sono: Estrazione e valutazione di Haar-like feature Classificazione mediante boosting (costruzione di un classificatore robusto come combinazione di molteplici classificatori semplici) ultiscale detection?? features classify x F(x) +1 face? y la localizzazione è effettuata facendo scorrere una finestra di ricerca (le cui dimensioni possono variare) sull immagine, estraendo le feature presenti nella finestra e classificando la finestra come volto o non volto.
, 137 154, 2004 28 Il localizzatore di Viola e Jones (3) I tre più importanti contributi dell")
15 AdaBoost learning procedure Obiettivo: costruire un classificatore non lineare complesso H (x) come combinazione lineare di classificatori più semplici detti classificatori deboli (weak classifiers): α h ( x) dove x è un pattern da classificare, h m (x) {-1,+1} sono i classificatori deboli, α m 0 sono i corrispondenti fattori di peso, α è il fattore di normalizzazione m= 1 m H ( x) m m= 1 = m= 1 α m m 29 N.B. : nella versione discreta h m (x) assume un valore discreto in {-1,+1} AdaBoost: idea di base AdaBoost è una tecnica di addestramento che ha lo scopo di apprendere la sequenza ottimale di classificatori deboli e i corrispondenti pesi. Richiede un insieme di pattern di training {(x 1,y 1 ),(x 2,y 2 ),,(x N,y N )}, dove y i {-1,+1} è l etichetta della classe associata al pattern x i R n. Durante l apprendimento è calcolata e aggiornata una distribuzione di pesi [w 1,w 2,,w N ] associati ai pattern di training ; w i è associato al pattern (x i,y i ). Dopo l iterazione m, è assegnato ai pattern più difficili da classificare un peso w 1 (m) superiore, cosicché alla successiva iterazione m+1 tali pattern riceveranno un attenzione maggiore. AdaBoost assume di avere a disposizione una procedura per l apprendimento di un classificatore debole a partire da un insieme di pattern di training, data la distribuzione [w i (m) ]. 30
 assume un valore discreto in {-1,+1} AdaBoost: idea di base AdaBoost è una tecnica di addestramento che ha lo scopo di apprendere la sequenza ottimale di")
16 31 Un esempio Ogni punto ha un etichetta che ne indica la classe: y i = +1 ( ) -1 ( ) e un peso: w i =1 Classificatore lineare debole ripreso da Antonio Un esempio 32 Ogni punto ha un etichetta che ne indica la classe: y i = +1 ( ) -1 ( ) e un peso: w i =1 Il migliore
 -1 ( ) e un peso: w i")
17 33 Un esempio Ogni punto ha un etichetta che ne indica la classe: y i = +1 ( ) -1 ( ) Aggiornamento pesi: w i exp{-y i H (x i )} Formuliamo ora un nuovo problema Un esempio 34 Ogni punto ha un etichetta che ne indica la classe: y i = +1 ( ) -1 ( ) Aggiornamento pesi: w i exp{-y i H (x i )} Formuliamo ora un nuovo problema
 problema")
18 Un esempio 35 Ogni punto ha un etichetta che ne indica la classe: y i = +1 ( ) -1 ( ) Aggiornamento pesi: w i exp{-y i H (x i )} Formuliamo ora un nuovo problema 36 Un esempio Ogni punto ha un etichetta che ne indica la classe: y i = +1 ( ) -1 ( ) Aggiornamento pesi: w i exp{-y i H (x i )} Formuliamo ora un nuovo problema
 problema")
19 Un esempio 37 f 1 f 2 f 4 f 3 Il classificatore robusto (non lineare) è costituito da una combinazione di classificatori deboli (lineari). 38 Haar-like features Il localizzatore di Viola e Jones, nelle sue molteplici varianti, utilizza alcuni tipi di feature di base. Ogni feature è posizionata in una sottoregione di una sottofinestra dell immagine. Le feature sono applicate modificandone la dimensione, la forma, e la posizione nella sottofinestra. Esempio: A, B feature con due rettangoli, C con tre, D con quattro Usando una sottofinestra di dimensione 24 24, al variare della posizione, forma e dimensione si possono ottenere decine di migliaia di feature. Queste feature sono utilizzate poiché: sono efficaci ai fini della localizzazione del volto; possono essere calcolate in modo efficiente usando l immagine integrale.

20 39 L immagine integrale (2) L immagine integrale in posizione (x,y) è la somma del valore dei pixel sopra e a sinistra di (x,y): II ( x, y) = I( x, y ) x x, y y L immagine integrale può essere calcolata con una sola scansione dell immagine originale usando le seguenti formule ricorsive: S(x,y) = S(x,y-1) + I(x,y) II(x,y) = II(x-1,y) + S(x,y) dove I(x,y) è il valore del pixel nell immagine originale, S(x,y) è la somma cumulativa per righe, S(x,-1)=0 e II(-1,y)=0. Calcolo efficiente di feature rettangolari Usando l immagine integrale, è possibile calcolare la somma del valore dei pixel in qualsiasi rettangolo. Ad esempio la somma all interno del rettangolo D è data da: II(4) + II(1) II(2) II(3) Le feature caratterizzate da 2, 3 o 4 rettangoli possono essere calcolate usando rispettivamente 6, 8 e 9 valori di riferimento. 40

21 41 Estensione delle feature (1) set di feature introdotto da Lienhart e aydt Rotazioni a 45 RSAT(x,y) Vi sono ora due tipi di immagini integrali Sum Area Table Rotated Sum Area Table 42 Estensione delle feature (2) Dimensione della finestra di detection : W H W Fattori massimi di scala lungo x e y X = w H Y = h Il valore della caratteristica è calcolato come somma pesata di due componenti: la somma dei pixel corrispondenti alla regione scura e la somma di quelli all interno della regione bianca. I segni dei due pesi sono opposti e i loro valori assoluti sono inversamente proporzionali alle aree delle rispettive regioni, in modo da effettuare un calcolo normalizzato.
22 43 Estensione delle feature (3) Calcolo di SAT in un solo passo SAT( 1,y) = SAT(x, 1)=0 SAT(x,y) = SAT(x,y 1) + SAT(x 1,y) + I(x,y) SAT(x 1,y 1) Per ogni rettangolo r=(x,y,w,h,0) non ruotato la somma dei pixel può essere calcolata come: RecSum(r) = SAT(x 1,y 1) + SAT(x+w 1,y+h 1) SAT(x 1,y+h 1) SAT(x+w 1,y 1) Estensione delle feature (4) Calcolo di RSAT in due passi Primo passo da sinistra a destra e dall alto al basso RSAT(x,y) = RSAT(x 1,y 1) + RSAT(x 1,y) + I(x,y) RSAT(x 2,y 1) con RSAT( 1,y) = RSAT( 2,y) = RSAT(x, 1) =0 RSAT(x,y) 44 Secondo passo da destra a sinistra e dal basso all alto RSAT(x,y) = RSAT(x,y) + RSAT(x 1,y+1) RSAT(x 2,y) Per ogni rettangolo r=(x,y,w,h,0) ruotato di 45 la somma dei pixel può essere calcolata come: RecSum(r) = RSAT(x+w,y+w) + RSAT(x h,y+h) RSAT(x,y) RSAT(x+w h,y+w+h)
23 AdaBoost: il classificatore debole (1) Il più semplice classificatore debole è un albero di decisione con un singolo nodo. Supponiamo di aver costruito -1 classificatori deboli {h m (x) m=1,..,-1} e di voler costruire h (x). Il classificatore confronta il valore di una feature z k* con una soglia prefissata τ k* e assegna i valori +1 o -1 di conseguenza: h (x) = +1 se z k* >τ k* = -1 altrimenti 45 AdaBoost: il classificatore debole (2) In questa forma h (x) dipende da due parametri: la feature z k* il valore di soglia τ k* I due parametri possono essere fissati in base al minimo errore pesato di classificazione: Scegliamo il valore di soglia τ k che minimizza l errore di classificazione per ciascuna feature z k ; La feature z k* scelta per il classificatore corrente è quella che permette di ottenere l errore di classificazione complessivamente più basso. 46
24 AdaBoost: il classificatore robusto (1) AdaBoost apprende una sequenza di classificatori deboli h m e li combina in un classificatore robusto H, minimizzando l upper bound all errore di classificazione di H. L upper bound si ottiene con la seguente formula: y H x y = = h x i i i m= 1 m m i J H e e α ( ) ( ) ( ) i dove i è l indice delle immagini di training. Dato il classificatore corrente H 1 x m= 1 α m hm x e il nuovo classificatore debole h, il miglior coefficiente α per il nuovo classificatore robusto H x = H 1 x + α h x minimizza il costo: α arg min J H x + α h x = 1 α i ( ) = ( ) 1 ( ( ) ( )) 47 ( ) ( ) ( ) AdaBoost: il classificatore robusto (2) Il costo è minimo per: α = 1 ε log ε dove ε è l errore di classificazione pesato: ε i 1 = w 1 i [ sign( H ( x )) y ] 1[C] è 1 se C è vera, 0 altrimenti. A ogni iterazione è aggiornato il peso di ciascun pattern in base alle prestazioni di H : w ( ) ( ) ( 1 x, y = w ) ( x, y) exp( yα h ( x) ) = exp( yh ( x) ) i i 48
25 AdaBoost: il classificatore robusto (3) 0. (Input) (1) Pattern di training, dove N=a+b; a pattern hanno etichetta b pattern hanno etichetta ; (2) Il numero di classificatori da combinare. 1. (Inizializzazione) per i pattern con etichetta per i pattern con etichetta 2. (Costruzione del classificatore) Per m = 1,..,: (1) Scegli il classificatore debole ottimale h m che minimizzi l errore pesato (2) Scegli α m (3) Aggiorna i pesi e normalizzali. 3. (Output) (1) Classificatore (2) Classificazione dei pattern di training 49 Classificatori robusti in cascata Un solo classificatore robusto, per quanto elimini una grande porzione di sottofinestre che non contengono facce, non soddisfa i requisiti di applicazioni in termini d efficienza e di percentuale molto bassa di falsi allarmi (ad esempio <= 10-6 ). Una possibile soluzione consiste nell impiego di classificatori in cascata, via via più complessi. IAGE SUB-WINDOW Esempio T T T 50% 20% 2% 1 Feature 5 Feature 20 Feature F NON-VOLTO F NON-VOLTO F NON-VOLTO VOLTO Un classificatore per una sola feature riesce a passare al secondo stadio la quasi totalità dei volti esistenti (circa 100%) mentre scarta al contempo il 50% dei falsi volti. Un classificatore per 5 feature raggiunge quasi il 100% di detection rate e il 40% di false positive rate (20% cumulativo) usando i dati dello stadio precedente. Un classificatore per 20 feature raggiunge quasi il 100% di detection rate con 10% di false positive rate (2% cumulativo). 50
26 51 Localizzazione dei volti Volto o non volto? Volto o non volto? Volto o non volto? La localizzazione dei volti avviene analizzando sottofinestre consecutive (sovrapposte) dell immagine in input e valutando per ciascuna se appartiene alla classe dei volti. Il localizzatore di Viola e Jones è uno dei più robusti ed efficienti allo stato dell arte L addestramento è molto lento (può richiedere giorni); La procedura di localizzazione è molto efficiente (funzionamento real-time). Valutazione delle prestazioni di localizzazione: indicatori Correttezza della localizzazione d r d l, r err =max, d l ( dl dr ) dlr Se err < 0.25, la localizzazione è considerata corretta Falsi positivi Percentuale di finestre classificate come volto che in realtà non lo contengono. Facce non localizzate Percentuale di volti che non sono stati individuati C-Error Errore di localizzazione: distanza euclidea tra il reale centro della faccia e quello ipotizzato dal sistema, normalizzato rispetto alla somma degli assi dell ellisse contenente il volto. 52
27 53 Database di test BioID face database UCD Colour Face Image (UCFI) Database CU face database Face detection home page:
Librerie digitali. Video. Gestione di video. Caratteristiche dei video. Video. Metadati associati ai video. Metadati associati ai video
 Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Analisi e diagramma di Pareto
 Analisi e diagramma di Pareto L'analisi di Pareto è una metodologia statistica utilizzata per individuare i problemi più rilevanti nella situazione in esame e quindi le priorità di intervento. L'obiettivo
Analisi e diagramma di Pareto L'analisi di Pareto è una metodologia statistica utilizzata per individuare i problemi più rilevanti nella situazione in esame e quindi le priorità di intervento. L'obiettivo
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione. Raffaele Cappelli raffaele.cappelli@unibo.it
 Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione Raffaele Cappelli raffaele.cappelli@unibo.it Contenuti Estrazione dei bordi Calcolo del gradiente Operatori di Roberts Operatori
Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione Raffaele Cappelli raffaele.cappelli@unibo.it Contenuti Estrazione dei bordi Calcolo del gradiente Operatori di Roberts Operatori
Sistemi Informativi Territoriali. Map Algebra
 Paolo Mogorovich Sistemi Informativi Territoriali Appunti dalle lezioni Map Algebra Cod.735 - Vers.E57 1 Definizione di Map Algebra 2 Operatori locali 3 Operatori zonali 4 Operatori focali 5 Operatori
Paolo Mogorovich Sistemi Informativi Territoriali Appunti dalle lezioni Map Algebra Cod.735 - Vers.E57 1 Definizione di Map Algebra 2 Operatori locali 3 Operatori zonali 4 Operatori focali 5 Operatori
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
RAPPRESENTAZIONE GRAFICA E ANALISI DEI DATI SPERIMENTALI CON EXCEL
 RAPPRESENTAZIONE GRAFICA E ANALISI DEI DATI SPERIMENTALI CON EXCEL 1 RAPPRESENTAZIONE GRAFICA Per l analisi dati con Excel si fa riferimento alla versione 2007 di Office, le versioni successive non differiscono
RAPPRESENTAZIONE GRAFICA E ANALISI DEI DATI SPERIMENTALI CON EXCEL 1 RAPPRESENTAZIONE GRAFICA Per l analisi dati con Excel si fa riferimento alla versione 2007 di Office, le versioni successive non differiscono
Morphological Image processing
 Morphological Image processing Morfologia matematica La parola morfologia comunemente denota una parte della biologia che tratta con la forma e la struttura di organismi In analogia al termine biologico
Morphological Image processing Morfologia matematica La parola morfologia comunemente denota una parte della biologia che tratta con la forma e la struttura di organismi In analogia al termine biologico
Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE. Operare con i numeri
 COMPETENZA CHIAVE MATEMATICA Fonte di legittimazione Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE L alunno utilizza il calcolo scritto e mentale con i numeri
COMPETENZA CHIAVE MATEMATICA Fonte di legittimazione Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE L alunno utilizza il calcolo scritto e mentale con i numeri
Corso di Visione Artificiale. Filtri parte I. Samuel Rota Bulò
 Corso di Visione Artificiale Filtri parte I Samuel Rota Bulò Filtri spaziali Un filtro spaziale è caratterizzato da un intorno e un'operazione che deve essere eseguita sui pixels dell'immagine in quell'intorno.
Corso di Visione Artificiale Filtri parte I Samuel Rota Bulò Filtri spaziali Un filtro spaziale è caratterizzato da un intorno e un'operazione che deve essere eseguita sui pixels dell'immagine in quell'intorno.
Plate Locator Riconoscimento Automatico di Targhe
 Progetto per Laboratorio di Informatica 3 - Rimotti Daniele, Santinelli Gabriele Plate Locator Riconoscimento Automatico di Targhe Il programma plate_locator.m prende come input: l immagine della targa
Progetto per Laboratorio di Informatica 3 - Rimotti Daniele, Santinelli Gabriele Plate Locator Riconoscimento Automatico di Targhe Il programma plate_locator.m prende come input: l immagine della targa
Introduzione al MATLAB c Parte 2
 Introduzione al MATLAB c Parte 2 Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 18 gennaio 2008 Outline 1 M-file di tipo Script e Function Script Function 2 Costrutti di programmazione
Introduzione al MATLAB c Parte 2 Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 18 gennaio 2008 Outline 1 M-file di tipo Script e Function Script Function 2 Costrutti di programmazione
Test riconoscimento automatico espressioni del volto
 Università degli studi di Roma Tor Vergata Test riconoscimento automatico espressioni del volto Preparato per: Giovannella Carlo, Professore Preparato da: Tobia Giani e Alessandro Borelli, Studenti 10
Università degli studi di Roma Tor Vergata Test riconoscimento automatico espressioni del volto Preparato per: Giovannella Carlo, Professore Preparato da: Tobia Giani e Alessandro Borelli, Studenti 10
Tecniche di riconoscimento statistico
 On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 5 Tecniche OCR Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com http://www.onairweb.com/corsopr
On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 5 Tecniche OCR Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com http://www.onairweb.com/corsopr
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
SVM. Veronica Piccialli. Roma 11 gennaio 2010. Università degli Studi di Roma Tor Vergata 1 / 14
 SVM Veronica Piccialli Roma 11 gennaio 2010 Università degli Studi di Roma Tor Vergata 1 / 14 SVM Le Support Vector Machines (SVM) sono una classe di macchine di che derivano da concetti riguardanti la
SVM Veronica Piccialli Roma 11 gennaio 2010 Università degli Studi di Roma Tor Vergata 1 / 14 SVM Le Support Vector Machines (SVM) sono una classe di macchine di che derivano da concetti riguardanti la
VC-dimension: Esempio
 VC-dimension: Esempio Quale è la VC-dimension di. y b = 0 f() = 1 f() = 1 iperpiano 20? VC-dimension: Esempio Quale è la VC-dimension di? banale. Vediamo cosa succede con 2 punti: 21 VC-dimension: Esempio
VC-dimension: Esempio Quale è la VC-dimension di. y b = 0 f() = 1 f() = 1 iperpiano 20? VC-dimension: Esempio Quale è la VC-dimension di? banale. Vediamo cosa succede con 2 punti: 21 VC-dimension: Esempio
Come costruire una distribuzione di frequenze per caratteri quantitativi continui
 Come costruire una distribuzione di frequenze per caratteri quantitativi continui Consideriamo i dati contenuti nel primo foglio di lavoro (quello denominato dati) del file esempio2.xls. I dati si riferiscono
Come costruire una distribuzione di frequenze per caratteri quantitativi continui Consideriamo i dati contenuti nel primo foglio di lavoro (quello denominato dati) del file esempio2.xls. I dati si riferiscono
GEOMETRIA DELLE MASSE
 1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
ISTITUTO COMPRENSIVO MONTEGROTTO TERME SCUOLA PRIMARIA DISCIPLINA: MATEMATICA - CLASSE PRIMA OBIETTIVI DI APPRENDIMENTO
 PRIMA DELLA DISCIPLINA: MATEMATICA - CLASSE PRIMA L alunno si muove con sicurezza nel calcolo scritto e mentale con i numeri naturali. Legge e comprende testi che coinvolgono aspetti logici e matematici.
PRIMA DELLA DISCIPLINA: MATEMATICA - CLASSE PRIMA L alunno si muove con sicurezza nel calcolo scritto e mentale con i numeri naturali. Legge e comprende testi che coinvolgono aspetti logici e matematici.
Grafici delle distribuzioni di frequenza
 Grafici delle distribuzioni di frequenza L osservazione del grafico può far notare irregolarità o comportamenti anomali non direttamente osservabili sui dati; ad esempio errori di misurazione 1) Diagramma
Grafici delle distribuzioni di frequenza L osservazione del grafico può far notare irregolarità o comportamenti anomali non direttamente osservabili sui dati; ad esempio errori di misurazione 1) Diagramma
Capitolo 2 Distribuzioni di frequenza
 Edizioni Simone - Vol. 43/1 Compendio di statistica Capitolo 2 Distribuzioni di frequenza Sommario 1. Distribuzioni semplici. - 2. Distribuzioni doppie. - 3. Distribuzioni parziali: condizionate e marginali.
Edizioni Simone - Vol. 43/1 Compendio di statistica Capitolo 2 Distribuzioni di frequenza Sommario 1. Distribuzioni semplici. - 2. Distribuzioni doppie. - 3. Distribuzioni parziali: condizionate e marginali.
Tecniche di riconoscimento statistico
 On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 6 Lettura targhe e testi in esterno Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com
On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 6 Lettura targhe e testi in esterno Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com
Università di L Aquila Facoltà di Biotecnologie Agro-alimentari
 RIFERIMENTI Università di L Aquila Facoltà di Biotecnologie Agro-alimentari Esame di Laboratorio di informatica e statistica Parte 3 (versione 1.0) Il riferimento permette di identificare univocamente
RIFERIMENTI Università di L Aquila Facoltà di Biotecnologie Agro-alimentari Esame di Laboratorio di informatica e statistica Parte 3 (versione 1.0) Il riferimento permette di identificare univocamente
PROBLEMI TRADIZIONALI SIMULAZIONE DELLA PROVA DI MATEMATICA
 Simulazione 01/15 ANNO SCOLASTICO 01/15 PROBLEMI TRADIZIONALI SIMULAZIONE DELLA PROVA DI MATEMATICA DELL ESAME DI STATO PER IL LICEO SCIENTIFICO Il candidato risolva uno dei due problemi Problema 1 Nella
Simulazione 01/15 ANNO SCOLASTICO 01/15 PROBLEMI TRADIZIONALI SIMULAZIONE DELLA PROVA DI MATEMATICA DELL ESAME DI STATO PER IL LICEO SCIENTIFICO Il candidato risolva uno dei due problemi Problema 1 Nella
A.S. 2012-1013 CLASSE PRIMA SCUOLA PRIMARIA D ISTITUTO COMPETENZA CHIAVE EUROPEA DISCIPLINA
 ISTITUTO COMPRENSIVO STATALE di Scuola dell Infanzia, Scuola Primaria e Scuola Secondaria di 1 grado San Giovanni Teatino (CH) CURRICOLO A.S. 2012-1013 CLASSE PRIMA SCUOLA PRIMARIA OBIETTIVI DI Sviluppa
ISTITUTO COMPRENSIVO STATALE di Scuola dell Infanzia, Scuola Primaria e Scuola Secondaria di 1 grado San Giovanni Teatino (CH) CURRICOLO A.S. 2012-1013 CLASSE PRIMA SCUOLA PRIMARIA OBIETTIVI DI Sviluppa
Regressione non lineare con un modello neurale feedforward
 Reti Neurali Artificiali per lo studio del mercato Università degli studi di Brescia - Dipartimento di metodi quantitativi Marco Sandri (sandri.marco@gmail.com) Regressione non lineare con un modello neurale
Reti Neurali Artificiali per lo studio del mercato Università degli studi di Brescia - Dipartimento di metodi quantitativi Marco Sandri (sandri.marco@gmail.com) Regressione non lineare con un modello neurale
Algoritmo per il rilevamento di targhe
 Algoritmo per il rilevamento di targhe 19 maggio 2008 Nell affrontare il problema del riconoscimento delle targhe sono stati sviluppati due algoritmi che basano la loro ricerca su criteri differenti. Lo
Algoritmo per il rilevamento di targhe 19 maggio 2008 Nell affrontare il problema del riconoscimento delle targhe sono stati sviluppati due algoritmi che basano la loro ricerca su criteri differenti. Lo
Sono casi particolari di MCF : SPT (cammini minimi) non vi sono vincoli di capacità superiore (solo x ij > 0) (i, j) A : c ij, costo di percorrenza
 non vi sono vincoli di capacità superiore (solo x ij > 0) (i, j) A : c ij, costo di percorrenza") Il problema di flusso di costo minimo (MCF) Dati : grafo orientato G = ( N, A ) i N, deficit del nodo i : b i (i, j) A u ij, capacità superiore (max quantità di flusso che può transitare) c ij, costo di
Il problema di flusso di costo minimo (MCF) Dati : grafo orientato G = ( N, A ) i N, deficit del nodo i : b i (i, j) A u ij, capacità superiore (max quantità di flusso che può transitare) c ij, costo di
Uso di base delle funzioni in Microsoft Excel
 Uso di base delle funzioni in Microsoft Excel Le funzioni Una funzione è un operatore che applicato a uno o più argomenti (valori, siano essi numeri con virgola, numeri interi, stringhe di caratteri) restituisce
Uso di base delle funzioni in Microsoft Excel Le funzioni Una funzione è un operatore che applicato a uno o più argomenti (valori, siano essi numeri con virgola, numeri interi, stringhe di caratteri) restituisce
DIAGRAMMA CARTESIANO
 DIAGRAMMA CARTESIANO Imparerai ora a costruire con excel un diagramma cartesiano. Inizialmente andremo a porre sul grafico un solo punto, lo vedremo cambiare di posizione cambiando i valori nelle celle
DIAGRAMMA CARTESIANO Imparerai ora a costruire con excel un diagramma cartesiano. Inizialmente andremo a porre sul grafico un solo punto, lo vedremo cambiare di posizione cambiando i valori nelle celle
Tecniche di riconoscimento statistico
 On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 4 Reti neurali per la classificazione Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com
On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 4 Reti neurali per la classificazione Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com
Interpolazione ed approssimazione di funzioni
 Interpolazione ed approssimazione di funzioni Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 9 novembre 2007 Outline 1 Polinomi Valutazione di un polinomio Algoritmo di Horner
Interpolazione ed approssimazione di funzioni Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 9 novembre 2007 Outline 1 Polinomi Valutazione di un polinomio Algoritmo di Horner
LA CORRELAZIONE LINEARE
 LA CORRELAZIONE LINEARE La correlazione indica la tendenza che hanno due variabili (X e Y) a variare insieme, ovvero, a covariare. Ad esempio, si può supporre che vi sia una relazione tra l insoddisfazione
LA CORRELAZIONE LINEARE La correlazione indica la tendenza che hanno due variabili (X e Y) a variare insieme, ovvero, a covariare. Ad esempio, si può supporre che vi sia una relazione tra l insoddisfazione
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Computazione per l interazione naturale: macchine che apprendono
 Computazione per l interazione naturale: macchine che apprendono Corso di Interazione Naturale! Prof. Giuseppe Boccignone! Dipartimento di Informatica Università di Milano! boccignone@di.unimi.it boccignone.di.unimi.it/in_2015.html
Computazione per l interazione naturale: macchine che apprendono Corso di Interazione Naturale! Prof. Giuseppe Boccignone! Dipartimento di Informatica Università di Milano! boccignone@di.unimi.it boccignone.di.unimi.it/in_2015.html
Indicando con x i minuti di conversazione effettuati in un mese, con la spesa totale nel mese e con il costo medio al minuto:
 PROBLEMA 1. Il piano tariffario proposto da un operatore telefonico prevede, per le telefonate all estero, un canone fisso di 10 euro al mese, più 10 centesimi per ogni minuto di conversazione. Indicando
PROBLEMA 1. Il piano tariffario proposto da un operatore telefonico prevede, per le telefonate all estero, un canone fisso di 10 euro al mese, più 10 centesimi per ogni minuto di conversazione. Indicando
13. Campi vettoriali
 13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e
 Alberi di decisione Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e lanciarlo con i parametri di default.
Alberi di decisione Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e lanciarlo con i parametri di default.
Strumenti e metodi per la redazione della carta del pericolo da fenomeni torrentizi
 Versione 2.0 Strumenti e metodi per la redazione della carta del pericolo da fenomeni torrentizi Corso anno 2011 E. MANUALE UTILIZZO HAZARD MAPPER Il programma Hazard Mapper è stato realizzato per redarre,
Versione 2.0 Strumenti e metodi per la redazione della carta del pericolo da fenomeni torrentizi Corso anno 2011 E. MANUALE UTILIZZO HAZARD MAPPER Il programma Hazard Mapper è stato realizzato per redarre,
CONTINUITÀ E DERIVABILITÀ Esercizi proposti. 1. Determinare lim M(sinx) (M(t) denota la mantissa di t)
 (M(t) denota la mantissa di t)") CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
Pro e contro delle RNA
 Pro e contro delle RNA Pro: - flessibilità: le RNA sono approssimatori universali; - aggiornabilità sequenziale: la stima dei pesi della rete può essere aggiornata man mano che arriva nuova informazione;
Pro e contro delle RNA Pro: - flessibilità: le RNA sono approssimatori universali; - aggiornabilità sequenziale: la stima dei pesi della rete può essere aggiornata man mano che arriva nuova informazione;
Abbiamo costruito il grafico delle sst in funzione del tempo (dal 1880 al 1995).
.") ANALISI DI UNA SERIE TEMPORALE Analisi statistica elementare Abbiamo costruito il grafico delle sst in funzione del tempo (dal 1880 al 1995). Si puo' osservare una media di circa 26 C e una deviazione
ANALISI DI UNA SERIE TEMPORALE Analisi statistica elementare Abbiamo costruito il grafico delle sst in funzione del tempo (dal 1880 al 1995). Si puo' osservare una media di circa 26 C e una deviazione
15 febbraio 2010 - Soluzione esame di geometria - 12 crediti Ingegneria gestionale - a.a. 2009-2010 COGNOME... NOME... N. MATRICOLA...
 15 febbraio 010 - Soluzione esame di geometria - 1 crediti Ingegneria gestionale - a.a. 009-010 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura
15 febbraio 010 - Soluzione esame di geometria - 1 crediti Ingegneria gestionale - a.a. 009-010 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura
RETTE, PIANI, SFERE, CIRCONFERENZE
 RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
Capitolo 13: L offerta dell impresa e il surplus del produttore
 Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
DOMINIO E LIMITI. Esercizio 3 Studiare gli insiemi di livello della funzione f, nei seguenti casi: 1) f(x,y) = y2 x 2 + y 2.
 f(x,y) = y2 x 2 + y 2.") FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
Protocollo di tracciamento e valutazione degli studenti dei corsi di italiano ICoNLingua A.A. 2013-2014
 Progetto ICoNLingua Scienza senza Frontiere CsF- Italia Protocollo di tracciamento e valutazione degli studenti dei corsi di italiano ICoNLingua A.A. 2013-2014 1. Introduzione La valutazione sia in itinere
Progetto ICoNLingua Scienza senza Frontiere CsF- Italia Protocollo di tracciamento e valutazione degli studenti dei corsi di italiano ICoNLingua A.A. 2013-2014 1. Introduzione La valutazione sia in itinere
Ottimizzazione delle interrogazioni (parte I)
") Ottimizzazione delle interrogazioni I Basi di Dati / Complementi di Basi di Dati 1 Ottimizzazione delle interrogazioni (parte I) Angelo Montanari Dipartimento di Matematica e Informatica Università di
Ottimizzazione delle interrogazioni I Basi di Dati / Complementi di Basi di Dati 1 Ottimizzazione delle interrogazioni (parte I) Angelo Montanari Dipartimento di Matematica e Informatica Università di
Lezione 10: Il problema del consumatore: Preferenze e scelta ottimale
 Corso di Scienza Economica (Economia Politica) prof. G. Di Bartolomeo Lezione 10: Il problema del consumatore: Preferenze e scelta ottimale Facoltà di Scienze della Comunicazione Università di Teramo Scelta
Corso di Scienza Economica (Economia Politica) prof. G. Di Bartolomeo Lezione 10: Il problema del consumatore: Preferenze e scelta ottimale Facoltà di Scienze della Comunicazione Università di Teramo Scelta
La Visione Artificiale. La vis ione delle macchine La vis ione umana Acquis izione di immag ine
 La Visione Artificiale La vis ione delle macchine La vis ione umana Acquis izione di immag ine Copyright Alcune slide sono tratte dal testo: Digital Image Processing Materiale didattico relativo si trova
La Visione Artificiale La vis ione delle macchine La vis ione umana Acquis izione di immag ine Copyright Alcune slide sono tratte dal testo: Digital Image Processing Materiale didattico relativo si trova
Un po di statistica. Christian Ferrari. Laboratorio di Matematica
 Un po di statistica Christian Ferrari Laboratorio di Matematica 1 Introduzione La statistica è una parte della matematica applicata che si occupa della raccolta, dell analisi e dell interpretazione di
Un po di statistica Christian Ferrari Laboratorio di Matematica 1 Introduzione La statistica è una parte della matematica applicata che si occupa della raccolta, dell analisi e dell interpretazione di
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all elaborazione di immagini Part II
 Introduzione all elaborazione di immagini Part II Obiettivi delle tecniche di elaborazione di immagini: miglioramento di qualità (image enhancement) ripristino di qualità o restauro (image restoration)
Introduzione all elaborazione di immagini Part II Obiettivi delle tecniche di elaborazione di immagini: miglioramento di qualità (image enhancement) ripristino di qualità o restauro (image restoration)
Prof.ssa Paola Vicard
 Questa nota consiste perlopiù nella traduzione da Descriptive statistics di J. Shalliker e C. Ricketts, 2000, University of Plymouth Consideriamo come esempio il data set contenuto nel foglio excel esercizio1_dati.xls.
Questa nota consiste perlopiù nella traduzione da Descriptive statistics di J. Shalliker e C. Ricketts, 2000, University of Plymouth Consideriamo come esempio il data set contenuto nel foglio excel esercizio1_dati.xls.
INTRODUZIONE A EXCEL ESERCITAZIONE I
 1 INTRODUZIONE A EXCEL ESERCITAZIONE I Corso di Idrologia e Infrastrutture Idrauliche Prof. Roberto Guercio Cos è Excel 2 Foglio di calcolo o foglio elettronico è formato da: righe e colonne visualizzate
1 INTRODUZIONE A EXCEL ESERCITAZIONE I Corso di Idrologia e Infrastrutture Idrauliche Prof. Roberto Guercio Cos è Excel 2 Foglio di calcolo o foglio elettronico è formato da: righe e colonne visualizzate
Il campionamento. La digitalizzazione. Teoria e pratica. La rappresentazione digitale delle immagini. La rappresentazione digitale delle immagini
 ACQUISIZIONE ED ELABORAZIONE DELLE IMMAGINI Teoria e pratica La digitalizzazione La digitalizzazione di oggetti legati a fenomeni di tipo analogico, avviene attraverso due parametri fondamentali: Il numero
ACQUISIZIONE ED ELABORAZIONE DELLE IMMAGINI Teoria e pratica La digitalizzazione La digitalizzazione di oggetti legati a fenomeni di tipo analogico, avviene attraverso due parametri fondamentali: Il numero
4. Proiezioni del piano e dello spazio
 4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
La distribuzione Normale. La distribuzione Normale
 La Distribuzione Normale o Gaussiana è la distribuzione più importante ed utilizzata in tutta la statistica La curva delle frequenze della distribuzione Normale ha una forma caratteristica, simile ad una
La Distribuzione Normale o Gaussiana è la distribuzione più importante ed utilizzata in tutta la statistica La curva delle frequenze della distribuzione Normale ha una forma caratteristica, simile ad una
Capitolo 12 - Individuazione di Forme 1. Template Matching
 Capitolo - Individuazione di Forme Template Matching Molte applicazioni di visione richiedono di localizzare nell immagine correntemente analizzata una o più istanze di una particolare sotto-immagine di
Capitolo - Individuazione di Forme Template Matching Molte applicazioni di visione richiedono di localizzare nell immagine correntemente analizzata una o più istanze di una particolare sotto-immagine di
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA
 SCUOLA PRIMARIA DI CORTE FRANCA MATEMATICA CLASSE QUINTA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA L ALUNNO SVILUPPA UN ATTEGGIAMENTO POSITIVO RISPETTO ALLA MATEMATICA,
SCUOLA PRIMARIA DI CORTE FRANCA MATEMATICA CLASSE QUINTA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA L ALUNNO SVILUPPA UN ATTEGGIAMENTO POSITIVO RISPETTO ALLA MATEMATICA,
online La situazione operativa. In ambito aziendale i processi decisionali richiedono assunzioni di responsabilità a vari LABORATORIO 1
 LABORATORIO 1 Scelta tra preventivi per l acquisto di un impianto di Luca CAGLIERO Materie: Informatica, Matematica, Economia aziendale (Triennio IT) L attività da svolgere in laboratorio, di carattere
LABORATORIO 1 Scelta tra preventivi per l acquisto di un impianto di Luca CAGLIERO Materie: Informatica, Matematica, Economia aziendale (Triennio IT) L attività da svolgere in laboratorio, di carattere
A intervalli regolari ogni router manda la sua tabella a tutti i vicini, e riceve quelle dei vicini.
 Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
LABORATORIO DI ANALISI DEI SISTEMI
 LABORATORIO DI ANALISI DEI SISTEMI Si utilizzerà, come strumento di lavoro, un foglio elettronico, il più diffuso Excel o anche quello gratuito di OpenOffice (www.openoffice.org). Tale scelta, pur non
LABORATORIO DI ANALISI DEI SISTEMI Si utilizzerà, come strumento di lavoro, un foglio elettronico, il più diffuso Excel o anche quello gratuito di OpenOffice (www.openoffice.org). Tale scelta, pur non
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
(Esercizi Tratti da Temi d esame degli ordinamenti precedenti)
") (Esercizi Tratti da Temi d esame degli ordinamenti precedenti) Esercizio 1 L'agenzia viaggi GV - Grandi Viaggi vi commissiona l'implementazione della funzione AssegnaVolo. Tale funzione riceve due liste
(Esercizi Tratti da Temi d esame degli ordinamenti precedenti) Esercizio 1 L'agenzia viaggi GV - Grandi Viaggi vi commissiona l'implementazione della funzione AssegnaVolo. Tale funzione riceve due liste
SOLUZIONI D = (-1,+ ).
.") SOLUZIONI. Data la funzione f() ( ) ln( ) a) trova il dominio di f b) indica quali sono gli intervalli in cui f() risulta positiva e quelli in cui risulta negativa c) determina le eventuali intersezioni
SOLUZIONI. Data la funzione f() ( ) ln( ) a) trova il dominio di f b) indica quali sono gli intervalli in cui f() risulta positiva e quelli in cui risulta negativa c) determina le eventuali intersezioni
Codifiche a lunghezza variabile
 Sistemi Multimediali Codifiche a lunghezza variabile Marco Gribaudo marcog@di.unito.it, gribaudo@elet.polimi.it Assegnazione del codice Come visto in precedenza, per poter memorizzare o trasmettere un
Sistemi Multimediali Codifiche a lunghezza variabile Marco Gribaudo marcog@di.unito.it, gribaudo@elet.polimi.it Assegnazione del codice Come visto in precedenza, per poter memorizzare o trasmettere un
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
MArine Coastal Information SysTEm
 GUIDA ALL UTILIZZO DELL INTERFACCIA CARTOGRAFICA Il MArine Coastal Information SysTEm è un sistema informativo integrato che permette di gestire dati ambientali interdisciplinari (fisici, chimici e biologici)
GUIDA ALL UTILIZZO DELL INTERFACCIA CARTOGRAFICA Il MArine Coastal Information SysTEm è un sistema informativo integrato che permette di gestire dati ambientali interdisciplinari (fisici, chimici e biologici)
CONI, CILINDRI, SUPERFICI DI ROTAZIONE
 CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
Elaborazione del colore
 Sistemi Multimediali Elaborazione del colore Molti degli strumenti offerti da un programma di fotoritocco ci permettono di lavorare sui colori. Questi strumenti vengono solitamente utilizzati per correggere
Sistemi Multimediali Elaborazione del colore Molti degli strumenti offerti da un programma di fotoritocco ci permettono di lavorare sui colori. Questi strumenti vengono solitamente utilizzati per correggere
RICONOSCIMENTO DI TARGHE AUTOMOBILISTICHE
 PROGETTO DEL CORSO DI VISIONE E PERCEZIONE PARTE 2 RICONOSCIMENTO DI TARGHE AUTOMOBILISTICHE Scopo del progetto Il progetto ha come obiettivo quello di riconoscere il testo di una targa automobilistica
PROGETTO DEL CORSO DI VISIONE E PERCEZIONE PARTE 2 RICONOSCIMENTO DI TARGHE AUTOMOBILISTICHE Scopo del progetto Il progetto ha come obiettivo quello di riconoscere il testo di una targa automobilistica
Fogli Elettronici: MS Excel
 Fogli Elettronici: MS Excel Informatica - A.A. 2010/2011 - Excel 7.0 Foglio Elettronico Un foglio elettronico (o spreadsheet) è un software applicativo nato dall esigenza di: organizzare insiemi di dati
Fogli Elettronici: MS Excel Informatica - A.A. 2010/2011 - Excel 7.0 Foglio Elettronico Un foglio elettronico (o spreadsheet) è un software applicativo nato dall esigenza di: organizzare insiemi di dati
Esame di Stato 2015 - Tema di Matematica
 Esame di Stato 5 - Tema di Matematica PROBLEMA Il piano tariffario proposto da un operatore telefonico prevede, per le telefonate all estero, un canone fisso di euro al mese, più centesimi per ogni minuto
Esame di Stato 5 - Tema di Matematica PROBLEMA Il piano tariffario proposto da un operatore telefonico prevede, per le telefonate all estero, un canone fisso di euro al mese, più centesimi per ogni minuto
Corso di Visione Artificiale. Stereopsi. Samuel Rota Bulò
 Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Cenni su algoritmi, diagrammi di flusso, strutture di controllo
 Cenni su algoritmi, diagrammi di flusso, strutture di controllo Algoritmo Spesso, nel nostro vivere quotidiano, ci troviamo nella necessità di risolvere problemi. La descrizione della successione di operazioni
Cenni su algoritmi, diagrammi di flusso, strutture di controllo Algoritmo Spesso, nel nostro vivere quotidiano, ci troviamo nella necessità di risolvere problemi. La descrizione della successione di operazioni
MINIMI QUADRATI. REGRESSIONE LINEARE
 MINIMI QUADRATI. REGRESSIONE LINEARE Se il coefficiente di correlazione r è prossimo a 1 o a -1 e se il diagramma di dispersione suggerisce una relazione di tipo lineare, ha senso determinare l equazione
MINIMI QUADRATI. REGRESSIONE LINEARE Se il coefficiente di correlazione r è prossimo a 1 o a -1 e se il diagramma di dispersione suggerisce una relazione di tipo lineare, ha senso determinare l equazione
Controllo di Gestione - Guida Operativa
 Controllo di Gestione - Guida Operativa Il modulo software di Controllo di Gestione, meglio denominato Monitoraggio e Controllo del piano degli obiettivi permette di monitorare, durante l esercizio, gli
Controllo di Gestione - Guida Operativa Il modulo software di Controllo di Gestione, meglio denominato Monitoraggio e Controllo del piano degli obiettivi permette di monitorare, durante l esercizio, gli
IsoStereo 3D: il sistema generale ed automatizzato per ricostruzione tridimensionale
 IsoStereo 3D: il sistema generale ed automatizzato per ricostruzione tridimensionale Isomorph srl, Giugno 2008 Caratteristiche del programma: IsoStereo 3D elabora immagini stereoscopiche e ricostruisce
IsoStereo 3D: il sistema generale ed automatizzato per ricostruzione tridimensionale Isomorph srl, Giugno 2008 Caratteristiche del programma: IsoStereo 3D elabora immagini stereoscopiche e ricostruisce
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
CONCETTO DI LIMITE DI UNA FUNZIONE REALE
 CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
Corso di Visione Artificiale. Immagini digitali. Samuel Rota Bulò
 Corso di Visione Artificiale Immagini digitali Samuel Rota Bulò Immagini digitali Un immagine viene generata dalla combinazione di una sorgente di energia e la riflessione o assorbimento di energia da
Corso di Visione Artificiale Immagini digitali Samuel Rota Bulò Immagini digitali Un immagine viene generata dalla combinazione di una sorgente di energia e la riflessione o assorbimento di energia da
Miglioramento dell analisi di immagine in GRASS tramite segmentazione
 Segmentazione in GRASS Miglioramento dell analisi di immagine in GRASS tramite segmentazione Alfonso Vitti e Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Italy FOSS4G-it
Segmentazione in GRASS Miglioramento dell analisi di immagine in GRASS tramite segmentazione Alfonso Vitti e Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Italy FOSS4G-it
Piani di input e piani di calcolo reale in FaTA-e
 0 1 Piani di input e piani di calcolo reali in FaTA-e Dalla versione XX di FaTA-e è presente una nuova implementazione per il calcolo dei baricentri di massa e rigidezza. La nuova procedura consente di
0 1 Piani di input e piani di calcolo reali in FaTA-e Dalla versione XX di FaTA-e è presente una nuova implementazione per il calcolo dei baricentri di massa e rigidezza. La nuova procedura consente di
Analisi bivariata. Dott. Cazzaniga Paolo. Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it
 Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it Introduzione : analisi delle relazioni tra due caratteristiche osservate sulle stesse unità statistiche studio del comportamento di due caratteri
Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it Introduzione : analisi delle relazioni tra due caratteristiche osservate sulle stesse unità statistiche studio del comportamento di due caratteri
Capitolo 4: Ottimizzazione non lineare non vincolata parte II. E. Amaldi DEIB, Politecnico di Milano
 Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
TECNICHE DI SIMULAZIONE
 TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
Excel avanzato. I nomi. Gli indirizzi e le formule possono essere sostituiti da nomi. Si creano tramite Inserisci Nome Definisci
 Excel avanzato I nomi marco.falda@unipd.it Gli indirizzi e le formule possono essere sostituiti da nomi documentazione astrazione Si creano tramite Inserisci Nome Definisci Vengono raccolti nell area riferimento
Excel avanzato I nomi marco.falda@unipd.it Gli indirizzi e le formule possono essere sostituiti da nomi documentazione astrazione Si creano tramite Inserisci Nome Definisci Vengono raccolti nell area riferimento
Dott.ssa Caterina Gurrieri
 Dott.ssa Caterina Gurrieri Le relazioni tra caratteri Data una tabella a doppia entrata, grande importanza riveste il misurare se e in che misura le variabili in essa riportata sono in qualche modo
Dott.ssa Caterina Gurrieri Le relazioni tra caratteri Data una tabella a doppia entrata, grande importanza riveste il misurare se e in che misura le variabili in essa riportata sono in qualche modo
Operazioni fondamentali
 Foglio elettronico Le seguenti indicazioni valgono per Excel 2007, ma le procedure per Excel 2010 sono molto simile. In alcuni casi (per esempio, Pulsante Office /File) ci sono indicazioni entrambe le
Foglio elettronico Le seguenti indicazioni valgono per Excel 2007, ma le procedure per Excel 2010 sono molto simile. In alcuni casi (per esempio, Pulsante Office /File) ci sono indicazioni entrambe le
manifatturiera e per i servizi
 CAPITOLO 7 Tecnologie per la produzione manifatturiera e per i servizi Agenda Tecnologia e core technology Processi core ed ausiliari Tecnologia e struttura organizzativa Tecnologia core manifatturiera
CAPITOLO 7 Tecnologie per la produzione manifatturiera e per i servizi Agenda Tecnologia e core technology Processi core ed ausiliari Tecnologia e struttura organizzativa Tecnologia core manifatturiera
Elementi di Psicometria con Laboratorio di SPSS 1
 Elementi di Psicometria con Laboratorio di SPSS 1 12-Il t-test per campioni appaiati vers. 1.2 (7 novembre 2014) Germano Rossi 1 germano.rossi@unimib.it 1 Dipartimento di Psicologia, Università di Milano-Bicocca
Elementi di Psicometria con Laboratorio di SPSS 1 12-Il t-test per campioni appaiati vers. 1.2 (7 novembre 2014) Germano Rossi 1 germano.rossi@unimib.it 1 Dipartimento di Psicologia, Università di Milano-Bicocca
Mete e coerenze formative. Dalla scuola dell infanzia al biennio della scuola secondaria di II grado
 Mete e coerenze formative Dalla scuola dell infanzia al biennio della scuola secondaria di II grado Area disciplinare: Area Matematica Finalità Educativa Acquisire gli alfabeti di base della cultura Disciplina
Mete e coerenze formative Dalla scuola dell infanzia al biennio della scuola secondaria di II grado Area disciplinare: Area Matematica Finalità Educativa Acquisire gli alfabeti di base della cultura Disciplina
Nell esempio verrà mostrato come creare un semplice documento in Excel per calcolare in modo automatico la rata di un mutuo a tasso fisso conoscendo
 Nell esempio verrà mostrato come creare un semplice documento in Excel per calcolare in modo automatico la rata di un mutuo a tasso fisso conoscendo - la durata del mutuo in anni - l importo del mutuo
Nell esempio verrà mostrato come creare un semplice documento in Excel per calcolare in modo automatico la rata di un mutuo a tasso fisso conoscendo - la durata del mutuo in anni - l importo del mutuo
GESTIONE della BASE di DATI
 GESTIONE della SE di DTI I dati sono una componente fondamentale di un GIS Devono essere valutati con attenzione gli strumenti usati per: creare l archivio dei dati manipolare le informazioni contenute
GESTIONE della SE di DTI I dati sono una componente fondamentale di un GIS Devono essere valutati con attenzione gli strumenti usati per: creare l archivio dei dati manipolare le informazioni contenute