Sensori inerziali nei Mobile Mapping Systems. Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007
|
|
|
- Beatrice Alberti
- 8 anni fa
- Visualizzazioni
Transcript
1 Sensori inerziali nei Mobile Mapping Systems Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007

2 MOTO DI UN CORPO RIGIDO NELLO SPAZIO: Descritto da 6 parametri: - un vettore posizione - 3 parametri di assetto Conoscenza di tali parametri fondamentale per la georeferenziazione diretta delle immagini acquisite dal MMS Allo stato attuale INS e GPS sono gli strumenti che garantiscono le 6 informazioni indipendenti con precisione e continuità

3 SENSORI PER LA NAVIGAZIONE Navigazione: metodi e tecniche per determinare posizione e assetto di un oggetto in moto, tipicamente in un sistema ECEF (Earth Centered Earth Fixed). Per fornire tali dati ad ogni istante, occorre che i dati di misura ci consentano di calcolare gli stati di navigazione: posizione, velocità e assetto negli istanti di campionamento e di predirli negli istanti voluti. (NB serve anche la velocità: altrimenti non so in che direzione mi sto muovendo!) Sensori: INS (Inertial Navigation System): determina tutti gli stati; GPS (GNSS) determina la posizione (se più GPS allora anche l assetto); Odometro solo le distanze.

4 SENSORI PER LA NAVIGAZIONE Ci sono due modalità/filosofie per la navigazione: Dead Reckoning System: la posizione/assetto attuale dipendono dalle precedenti + la misura di direzione e velocità nell ultimo t: Esempi: odometro, IMU, GPS di fase integrano osservazioni nel tempo: questo influenza le caratteristiche degli errori (correlati temporalmente) Position fixing: ogni dato di posizione è indipendente dagli altri; al più è legato a reference points Esempi: GPS di codice
 Position fixing: ogni dato di posizione è indipendente dagli altri; al più è legato a")
5 Navigazione inerziale e sistemi di riferimento La dinamica del veicolo può essere descritta in un sistema inerziale (i-frame), ovvero un sistema in cui vale la 2^ legge di Newton F = m a. Un sistema di questo tipo può essere definito con origine nel centro della Terra e orientamento rispetto alla sfera celeste con osservazioni astronomiche Un sistema Earth-centeredEarth-fixed (e-frame) come il WGS84 può essere riportato ad un i-frame conoscendo w terra Il moto del veicolo è di solito espresso in un local level frame: il sistema di navigazione (n-frame). Il sistema body (b-frame) è solidale al veicolo; assi forward, right, down (throughthe-floor). Le misure di un INS sono riferite a questi sistemi
 come il WGS84 può essere riportato ad un i-frame conoscendo w terra Il moto del veicolo è di solito espresso in un local level frame: il")
6 COS E UN SISTEMA INERZIALE INS? E un insieme di sensori che misurano le forze inerziali generate dal movimento di un oggetto. Misure triassiali di: Accelerazioni; Velocità angolari La navigazione è l applicazione più frequente

7 Navigazione inerziale: il principio La navigazione inerziale è fondata sulle misure di accelerazione e di velocità angolare del body rispetto ad un sistema inerziale. La posizione è ottenuta essenzialmente integrando le misure di accelerazione da accelerometri. Ne servono tanti quanti i GdL del moto: due se è piano, in direzioni ortogonali; altrimenti tre per un moto libero. Usare solo gli accelerometri non basta, perché per effetto del moto del body, i loro assi non restano allineati agli assi del navigation frame. Inoltre, il navigation frame non è inerziale: agisce la forza centrifuga. I giroscopi sono necessari per calcolare la sequenza di trasformazioni b n e i- frames.

8 Cos è un ACCELEROMETRO? L accelerometro è un sensore di misura dell accelerazione lungo un asse: una massa di prova, di solito sospesa ad una molla, sottoposta ad un accelerazione subisce uno spostamento, che viene trasformato in segnale elettrico.

9 PENDULOUS QUARTZ ACCELEROMETER Accelerometro capacitivo: spostamento della massa determinata come variazione della capacità elettrica di un condensatore al variare della distanza tra le armature. Elemento in quarzo sensibile alle accelerazioni, su cui sono montate bobine che interagiscono con il campo magnetico generato dalla parte fissa (e magnetizzata) del dispositivo

10 QUARTZ RESONANT BEAM ACCELEROMETER Si basa sulla variazione di frequenza di oscillazione di fasce di quarzo al variare della forza applicata L accelerazione misurata come differenza di frequenza tra le fasce in tensione e in compressione

11 Cos è un GIROSCOPIO? Il giroscopio è un dispositivo fisico rotante che, per effetto della legge di conservazione del momento angolare, tende a mantenere il suo asse di rotazione orientato in una direzione fissa permettendo di seguire nel tempo l orientamento di una terna, nella fattispecie quella n-frame. In commercio sono disponibili giroscopi a più gradi di libertà. I giroscopi meccanici sono installati in piattaforme gimbaled: Micromotori e un controllo di retroazione mantengono la piattaforma allineata nel local level frame, ovvero lo n-frame elevate precisioni, costosi processamento dati semplice.

12 Cos è un GIROSCOPIO? RING LASER GYROS: basato sul principio relativistico che la velocità della luce è costante in ogni riferimento inerziale, quindi se il tempo di percorrenza di due fasci di luce calcolato attraverso interferometro è diverso, allora il sistema ha subito una rotazione attorno all asse perpendicolare al sistema. Questi giroscopi non seguono meccanicamente il n-frame, ma determinano la precessione apparente analiticamente. Sono meno precisi e meno costosi. Le piattaforme che li montano sono definite strapdown: gli accelerometri sono fissati direttamente al body, per cui misurano nel b-frame

13 Cos è un GIROSCOPIO? MEMS (Micro-Electrical Mechanical Systems): poco costosi miniaturizzati (<< 1 mm) impiegano come sensori cristalli piezoelettrici molto sensibili sfruttano la forza di Coriolis

14 ANGOLI DI EULERO Nelle piattaforme strapdown gli accelerometri sono solidali al veicolo, quindi per introdurre le accelerazioni nelle equazioni di navigazione è necessario considerare le rotazioni dalla terna bframe alla n-frame. Nell ordine (inverso) sono: Angolo di rollio Angolo di beccheggio Angolo di prua

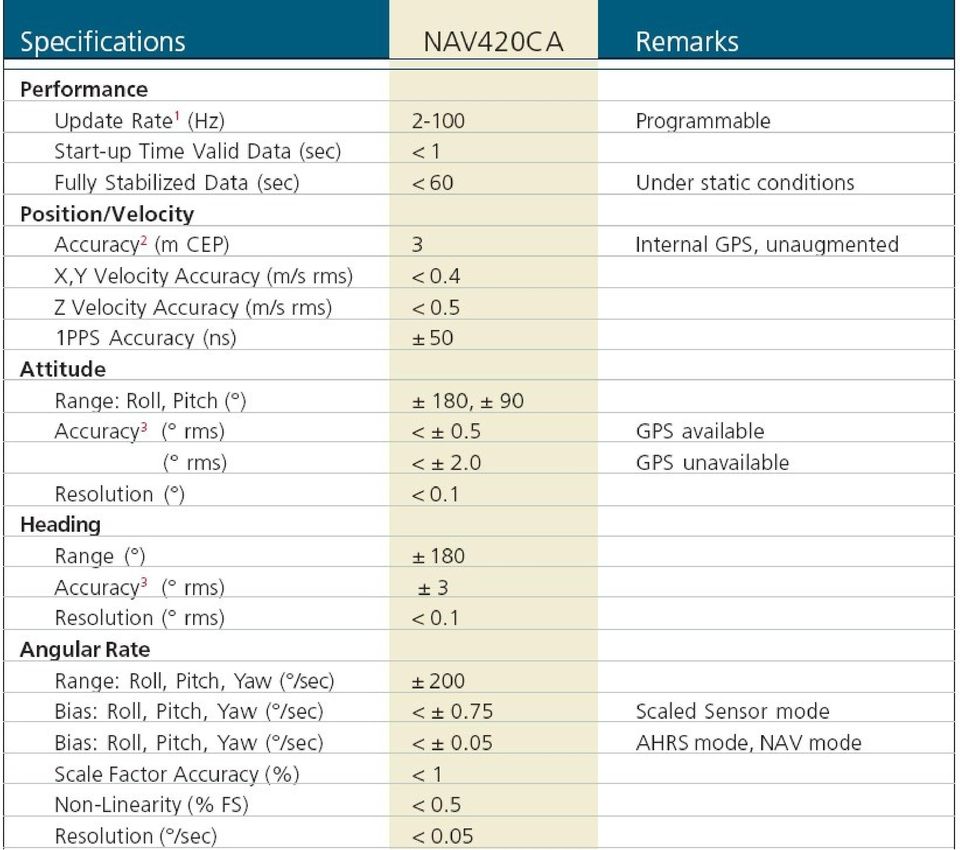
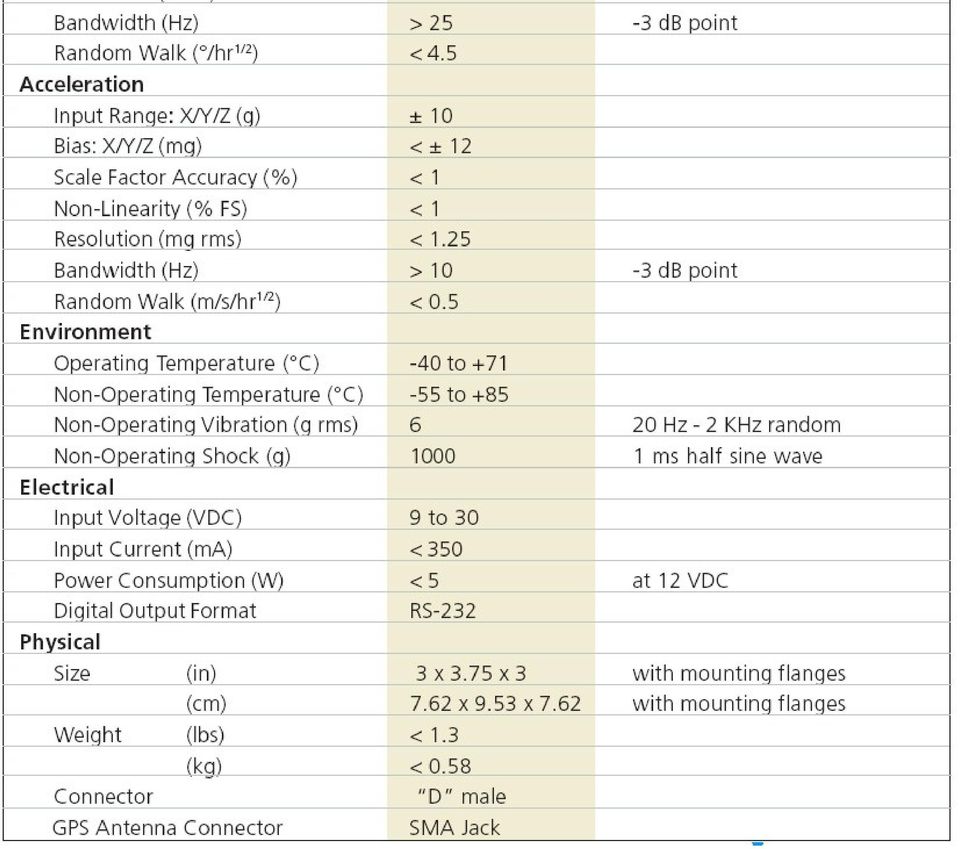
15 ESEMPIO DI INS: NAV420

16

17
18
19 Inertial navigation systems: error sources Il comportamento dei giroscopi può essere modellato come una componente random ad alta frequenza e da errori sistematici funzione del tempo riassunti da un bias per unità di tempo ed un fattore di scala. Gli accelerometri hanno un comportamento più semplice: anche per essi in sintesi si ha un bias per unità di tempo ed un fattore di scala. Nella maggior parte dei casi la componente random ad alta frequenza può esser ridotta efficacemente, grazie all elevata frequenza di misura. E necessaria una procedura di calibrazione per modellare gli errori sistematici. Una fonte di dati indipendenti come posizione e velocità da un GPS può essere integrata nella soluzione per controllare le derive.

20 PREGI GPS DIFETTI INS Alta precisione di posizione e velocità nel lungo periodo Precisione elevata di posizione e velocità solo nel brevissimo periodo Decremento di precisione nel tempo Precisione indipendente dal tempo PREGI INS DIFETTI GPS Dati d assetto accurati Dati d assetto rumorosi Alta frequenza delle misure Bassa frequenza delle misure Nessun periodo di interruzione della misura Periodi di interruzione del segnale INTEGRAZIONE INS/DGPS

21
22 Odometri Misurano la distanza percorsa dal veicolo in funzione del tempo Tipologie: Contagiri applicato alla ruota, che genera n impulsi al giro: Problemi: - costanza del diametro della ruota (pressione, carico dinamico, curva..) errore di scala (proporzionale alla distanza percorsa) - non fornisce direttamente l asse strada Altre : - ottico (a interferenza): elevata risoluzione, molto costoso - a microonde: costo intermedio, funziona male a v prossime a zero
23 ESEMPI DELL UNIVERSITA DI PERUGIA DI P.O.S. E CINEMATICI ESEMPI DI M.M.S.
Giroscopi, girobussole e sistemi di guida inerziale
 Giroscopi, girobussole e sistemi di guida inerziale (Ing. Stefano Di Cairano) Scopi: Giroscopi e Sistemi di Guida Inerziale 1. Fornire misurazioni di velocità e accelerazioni angolari 2. Fornire misurazioni
Giroscopi, girobussole e sistemi di guida inerziale (Ing. Stefano Di Cairano) Scopi: Giroscopi e Sistemi di Guida Inerziale 1. Fornire misurazioni di velocità e accelerazioni angolari 2. Fornire misurazioni
INTRODUZIONE ALL IMPIEGO DI SENSORI INERZIALI E GPS NELLA GEOREFERENZIAZIONE DIRETTA DELLE IMMAGINI IN FOTOGRAMMETRIA AEREA E TERRESTRE
 DIPARTIMENTO DI INGEGNERIA CIVILE, DELL AMBIENTE, DEL TERRITORIO ED ARCHITETTURA Università degli Studi di Parma Settore Scientifico Disciplinare: ICAR/06 Topografia e Cartografia INTRODUZIONE ALL IMPIEGO
DIPARTIMENTO DI INGEGNERIA CIVILE, DELL AMBIENTE, DEL TERRITORIO ED ARCHITETTURA Università degli Studi di Parma Settore Scientifico Disciplinare: ICAR/06 Topografia e Cartografia INTRODUZIONE ALL IMPIEGO
Tecniche per l analisi della postura e del movimento
 Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Sensor Systems ADM-E2-M
 Sistema di riferimento per navigazione ed assetto Sensor Systems ADM-E2-M Datasheet 2010 Sensor Systems Srl La piattaforma inerziale ADM-E2-M Attitude and Heading Reference System (AHRS) è un sistema ad
Sistema di riferimento per navigazione ed assetto Sensor Systems ADM-E2-M Datasheet 2010 Sensor Systems Srl La piattaforma inerziale ADM-E2-M Attitude and Heading Reference System (AHRS) è un sistema ad
Sensori Fisici. a.tognetti@centropiaggio.unipi.it
 Sensori Fisici a.tognetti@centropiaggio.unipi.it Misure di velocità ed accelerazione Tecniche a differenziazione ed integrazione In linea di principio è possibile determinare la velocità e l'accelerazione
Sensori Fisici a.tognetti@centropiaggio.unipi.it Misure di velocità ed accelerazione Tecniche a differenziazione ed integrazione In linea di principio è possibile determinare la velocità e l'accelerazione
INTEGRAZIONE CON GPS
 INTEGRAZIONE CON GPS LORAN-C Il sistema LORAN-C (LOng RANge) Sistema di radio-navigazione terrestre costituito da una catena di almeno tre stazioni di trasmissione. Gli utenti devono essere muniti di appositi
INTEGRAZIONE CON GPS LORAN-C Il sistema LORAN-C (LOng RANge) Sistema di radio-navigazione terrestre costituito da una catena di almeno tre stazioni di trasmissione. Gli utenti devono essere muniti di appositi
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare
 L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
Sensori di Sensori di spost spos am ent ent a cont cont t at o Pot P enziom etri enziom
 Cap 8: SENSORI PER MISURE DI MOTO Per misure di moto intendiamo le misure di spostamenti, velocità ed accelerazioni di oggetti, di grandezze cinematiche sia lineari che angolari. Sensori di spostamento
Cap 8: SENSORI PER MISURE DI MOTO Per misure di moto intendiamo le misure di spostamenti, velocità ed accelerazioni di oggetti, di grandezze cinematiche sia lineari che angolari. Sensori di spostamento
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
Figura 4. Conclusione
 Forza di Coriolis La forza di Coriolis é una forza che si manifesta su un corpo all interno di un sistema di riferimento (SDR) rotante, quale la terra che ruota su se stessa, quando il corpo stesso si
Forza di Coriolis La forza di Coriolis é una forza che si manifesta su un corpo all interno di un sistema di riferimento (SDR) rotante, quale la terra che ruota su se stessa, quando il corpo stesso si
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Forze, leggi della dinamica, diagramma del. 28 febbraio 2009 (PIACENTINO - PREITE) Fisica per Scienze Motorie
 Fisica per Scienze Motorie") Forze, leggi della dinamica, diagramma del corpo libero 1 FORZE Grandezza fisica definibile come l' agente in grado di modificare lo stato di quiete o di moto di un corpo. Ci troviamo di fronte ad una
Forze, leggi della dinamica, diagramma del corpo libero 1 FORZE Grandezza fisica definibile come l' agente in grado di modificare lo stato di quiete o di moto di un corpo. Ci troviamo di fronte ad una
Definizioni del secondo ed evoluzione degli orologi
 Definizioni del secondo ed evoluzione degli orologi Nel corso dei secoli vari strumenti aiutarono l'uomo a misurare il tempo; orologi solari, clessidre e orologi a pendolo definirono con minore o maggiore
Definizioni del secondo ed evoluzione degli orologi Nel corso dei secoli vari strumenti aiutarono l'uomo a misurare il tempo; orologi solari, clessidre e orologi a pendolo definirono con minore o maggiore
a t Esercizio (tratto dal problema 5.10 del Mazzoldi)
") 1 Esercizio (tratto dal problema 5.10 del Mazzoldi) Una guida semicircolare liscia verticale di raggio = 40 cm è vincolata ad una piattaforma orizzontale che si muove con accelerazione costante a t = 2
1 Esercizio (tratto dal problema 5.10 del Mazzoldi) Una guida semicircolare liscia verticale di raggio = 40 cm è vincolata ad una piattaforma orizzontale che si muove con accelerazione costante a t = 2
MISURE DIMENSIONALI MISURE DIMENSIONALI: - Sistemi a contatto. - Sistemi senza contatto.
 MISURE DIMENSIONALI Modello: tubo cilindrico misurato con forcelle del calibro caratterizzate da superfici piane e parallele fra loro. MISURE DIMENSIONALI: D Diametro del tubo misurato con calibro. Ripetendo
MISURE DIMENSIONALI Modello: tubo cilindrico misurato con forcelle del calibro caratterizzate da superfici piane e parallele fra loro. MISURE DIMENSIONALI: D Diametro del tubo misurato con calibro. Ripetendo
Cap 12 12 -- Misure di vi braz di vi ioni
 Cap 12 - Misure di vibrazioni Le vibrazioni sono poi da sempre uno strumento di diagnostica di macchine e sistemi meccanici 1 Le direttive CEE 89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE, obbliga tutti
Cap 12 - Misure di vibrazioni Le vibrazioni sono poi da sempre uno strumento di diagnostica di macchine e sistemi meccanici 1 Le direttive CEE 89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE, obbliga tutti
Integrazione di sensori nei Mobile Mapping Systems. Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007
 Integrazione di sensori nei Mobile Mapping Systems Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007 IL veicolo vincitore nel 2005 del Stanford Racing Team era dotato di: - 5 laser scanners
Integrazione di sensori nei Mobile Mapping Systems Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007 IL veicolo vincitore nel 2005 del Stanford Racing Team era dotato di: - 5 laser scanners
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini
 Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
Modello generale di trasduttore Come leggere la scheda tecnica di un trasduttore
 Modello generale di trasduttore Come leggere la scheda tecnica di un trasduttore Modello generale di trasduttore Informazioni sulle caratteristiche fisiche Sistema di misura Catena di misura Dati numerici
Modello generale di trasduttore Come leggere la scheda tecnica di un trasduttore Modello generale di trasduttore Informazioni sulle caratteristiche fisiche Sistema di misura Catena di misura Dati numerici
E possibile classificazione i trasduttori in base a diversi criteri, ad esempio: Criterio Trasduttori Caratteristiche
 PREMESSA In questa lezione verranno illustrate la classificazione delle diverse tipologie di trasduttori utilizzati nei sistemi di controllo industriali ed i loro parametri caratteristici. CLASSIFICAZIONE
PREMESSA In questa lezione verranno illustrate la classificazione delle diverse tipologie di trasduttori utilizzati nei sistemi di controllo industriali ed i loro parametri caratteristici. CLASSIFICAZIONE
1 Introduzione alla Meccanica Razionale 1 1.1 Che cos è la Meccanica Razionale... 1 1.2 Un esempio... 2
 Indice 1 Introduzione alla Meccanica Razionale 1 1.1 Che cos è la Meccanica Razionale..................... 1 1.2 Un esempio................................. 2 2 Spazi Vettoriali, Spazio e Tempo 7 2.1 Cos
Indice 1 Introduzione alla Meccanica Razionale 1 1.1 Che cos è la Meccanica Razionale..................... 1 1.2 Un esempio................................. 2 2 Spazi Vettoriali, Spazio e Tempo 7 2.1 Cos
Cenni sui trasduttori. Con particolare attenzione al settore marittimo
 Cenni sui trasduttori Con particolare attenzione al settore marittimo DEFINIZIONI Un Trasduttore è un dispositivo che converte una grandezza fisica in un segnale di natura elettrica Un Sensore è l elemento
Cenni sui trasduttori Con particolare attenzione al settore marittimo DEFINIZIONI Un Trasduttore è un dispositivo che converte una grandezza fisica in un segnale di natura elettrica Un Sensore è l elemento
Argomenti del corso Parte II Strumenti di misura
 Argomenti del corso Parte II Strumenti di misura 2. Misure di massa e forza Campioni di riferimento Misure di massa Bilance: analitica, a piattaforma Celle di carico estensimetriche Celle di carico piezoelettriche
Argomenti del corso Parte II Strumenti di misura 2. Misure di massa e forza Campioni di riferimento Misure di massa Bilance: analitica, a piattaforma Celle di carico estensimetriche Celle di carico piezoelettriche
Relatività INTRODUZIONE
 Relatività INTRODUZIONE Un po di ordine Einstein, nel 1905, dopo aver inviato alcuni articoli alla rivista scientifica «Annalen der physik» diventa subito famoso, uno dei quali riguardava la relatività
Relatività INTRODUZIONE Un po di ordine Einstein, nel 1905, dopo aver inviato alcuni articoli alla rivista scientifica «Annalen der physik» diventa subito famoso, uno dei quali riguardava la relatività
Estensimetro. in variazioni di resistenza.
 Estensimetro La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la variazione di geometria che l oggetto in questione subisce. L estensimetro estensimetro,
Estensimetro La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la variazione di geometria che l oggetto in questione subisce. L estensimetro estensimetro,
2. Giovedì 5/03/2015, 11 13. ore: 2(4) Spazi vettoriali euclidei. Vettori nello spazio fisico: Prodotto scalare e prodotto
 Spazi vettoriali euclidei. Vettori nello spazio fisico: Prodotto scalare e prodotto") Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2014/2015 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2015 1. Lunedì 2/03/2015, 11 13. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2014/2015 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2015 1. Lunedì 2/03/2015, 11 13. ore: 2(2) Presentazione
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Nome..Cognome.. Classe 4G 4 dicembre 2008. VERIFICA DI FISICA: lavoro ed energia
 Nome..Cognome.. Classe 4G 4 dicembre 8 VERIFIC DI FISIC: lavoro ed energia Domande ) Energia cinetica: (punti:.5) a) fornisci la definizione più generale possibile di energia cinetica, specificando l equazione
Nome..Cognome.. Classe 4G 4 dicembre 8 VERIFIC DI FISIC: lavoro ed energia Domande ) Energia cinetica: (punti:.5) a) fornisci la definizione più generale possibile di energia cinetica, specificando l equazione
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo.
 Introduzione Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo. riassunto Cosa determina il moto? Forza - Spinta di un
Introduzione Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo. riassunto Cosa determina il moto? Forza - Spinta di un
DINAMICA. 1. La macchina di Atwood è composta da due masse m
 DINAMICA. La macchina di Atwood è composta da due masse m e m sospese verticalmente su di una puleggia liscia e di massa trascurabile. i calcolino: a. l accelerazione del sistema; b. la tensione della
DINAMICA. La macchina di Atwood è composta da due masse m e m sospese verticalmente su di una puleggia liscia e di massa trascurabile. i calcolino: a. l accelerazione del sistema; b. la tensione della
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
La prove dinamiche sugli edifici II parte strumentazione e analisi dei segnali
 La prove dinamiche sugli edifici II parte strumentazione e analisi dei segnali Luca Facchini e-mail: luca.facchini@unifi.it Introduzione Quali strumenti vengono utilizzati? Le grandezze di interesse nelle
La prove dinamiche sugli edifici II parte strumentazione e analisi dei segnali Luca Facchini e-mail: luca.facchini@unifi.it Introduzione Quali strumenti vengono utilizzati? Le grandezze di interesse nelle
BIOMECCANICA A A 2 0 11-2 0 1 2. P r o f. s s a M a r i a G u e r r i s i D o t t. P i e t r o P i c e r n o
 A A 2 0 11-2 0 1 2 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 11-2 0 1 2 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
ALLEGATO 1 NOTE SULL USO DEL METODO DI RILIEVO LASER SCANNER PER LE CAVE DEL COMUNE DI NUVOLENTO.
 ALLEGATO 1 NOTE SULL USO DEL METODO DI RILIEVO LASER SCANNER PER LE CAVE DEL COMUNE DI NUVOLENTO. A)Generalità Una prima importante precisazione: il metodo non ricorre a tecniche aerofotogrammetriche,
ALLEGATO 1 NOTE SULL USO DEL METODO DI RILIEVO LASER SCANNER PER LE CAVE DEL COMUNE DI NUVOLENTO. A)Generalità Una prima importante precisazione: il metodo non ricorre a tecniche aerofotogrammetriche,
DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA. Dinamica: studio delle forze che causano il moto dei corpi
 DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA Dinamica: studio delle forze che causano il moto dei corpi 1 Forza Si definisce forza una qualunque causa esterna che produce una variazione dello stato
DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA Dinamica: studio delle forze che causano il moto dei corpi 1 Forza Si definisce forza una qualunque causa esterna che produce una variazione dello stato
A A 2 0 1 2-2 0 1 3 BIOMECCANICA. P i e t r o P i c e r n o, P h D
 A A 2 0 1 2-2 0 1 3 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 1 2-2 0 1 3 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
Il fotone. Emanuele Pugliese, Lorenzo Santi URDF Udine
 Il fotone Emanuele Pugliese, Lorenzo Santi URDF Udine Interpretazione di Einstein dell effetto fotoelettrico Esistono «particelle»* di luce: i fotoni! La luce è composta da quantità indivisibili di energia
Il fotone Emanuele Pugliese, Lorenzo Santi URDF Udine Interpretazione di Einstein dell effetto fotoelettrico Esistono «particelle»* di luce: i fotoni! La luce è composta da quantità indivisibili di energia
Energia e Lavoro. In pratica, si determina la dipendenza dallo spazio invece che dal tempo
 Energia e Lavoro Finora abbiamo descritto il moto dei corpi (puntiformi) usando le leggi di Newton, tramite le forze; abbiamo scritto l equazione del moto, determinato spostamento e velocità in funzione
Energia e Lavoro Finora abbiamo descritto il moto dei corpi (puntiformi) usando le leggi di Newton, tramite le forze; abbiamo scritto l equazione del moto, determinato spostamento e velocità in funzione
Generazione campo magnetico
 ELETTRO-MAGNETISMO Fra magnetismo ed elettricità esistono stretti rapporti: La corrente elettrica genera un campo magnetico; Un campo magnetico può generare elettricità. Generazione campo magnetico Corrente
ELETTRO-MAGNETISMO Fra magnetismo ed elettricità esistono stretti rapporti: La corrente elettrica genera un campo magnetico; Un campo magnetico può generare elettricità. Generazione campo magnetico Corrente
PRINCIPI DI TRASDUZIONE
 PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo
 Momento di una forza Nella figura 1 è illustrato come forze uguali e contrarie possono non produrre equilibrio, bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo esteso.
Momento di una forza Nella figura 1 è illustrato come forze uguali e contrarie possono non produrre equilibrio, bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo esteso.
Cenni di geografia astronomica. Giorno solare e giorno siderale.
 Cenni di geografia astronomica. Tutte le figure e le immagini (tranne le ultime due) sono state prese dal sito Web: http://www.analemma.com/ Giorno solare e giorno siderale. La durata del giorno solare
Cenni di geografia astronomica. Tutte le figure e le immagini (tranne le ultime due) sono state prese dal sito Web: http://www.analemma.com/ Giorno solare e giorno siderale. La durata del giorno solare
Grandezze fisiche e loro misura
 Grandezze fisiche e loro misura Cos è la fisica? e di che cosa si occupa? - Scienza sperimentale che studia i fenomeni naturali suscettibili di sperimentazione e caratterizzati da entità o grandezze misurabili.
Grandezze fisiche e loro misura Cos è la fisica? e di che cosa si occupa? - Scienza sperimentale che studia i fenomeni naturali suscettibili di sperimentazione e caratterizzati da entità o grandezze misurabili.
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Motore passo passo: Laboratorio di Elettronica 1
 Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
PALI Si distinguono: Nel caso 1 il palo non modifica il moto ondoso, mentre nel caso 2 il moto ondoso è modificato dal palo.
 PALI Si distinguono: 1. pali di piccolo diametro se D/L0,05 Nel caso 1 il palo non modifica il moto ondoso, mentre nel caso 2 il moto ondoso è modificato dal palo.
PALI Si distinguono: 1. pali di piccolo diametro se D/L0,05 Nel caso 1 il palo non modifica il moto ondoso, mentre nel caso 2 il moto ondoso è modificato dal palo.
Lezione 16. Motori elettrici: introduzione
 Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
L IDENTIFICAZIONE STRUTTURALE
 e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
E 0 = E 1 2 + E 0. 2 = E h. = 3.2kV / m. 2 1 x. κ 1. κ 2 κ 1 E 1 = κ 2 E 2. = κ 1 E 1 x ε 0 = 8
 Solo Ingegneria dell Informazione e Ingegneria dell Energia (Canale 2 e DM 59) Problema Due condensatori piani C e C, uguali ad armature quadrate separate dalla distanza, sono connessi in parallelo. Lo
Solo Ingegneria dell Informazione e Ingegneria dell Energia (Canale 2 e DM 59) Problema Due condensatori piani C e C, uguali ad armature quadrate separate dalla distanza, sono connessi in parallelo. Lo
quale agisce una forza e viceversa. situazioni. applicate a due corpi che interagiscono. Determinare la forza centripeta di un
 CLASSE Seconda DISCIPLINA Fisica ORE SETTIMANALI 3 TIPO DI PROVA PER GIUDIZIO SOSPESO Test a risposta multipla MODULO U.D Conoscenze Abilità Competenze Enunciato del primo principio della Calcolare l accelerazione
CLASSE Seconda DISCIPLINA Fisica ORE SETTIMANALI 3 TIPO DI PROVA PER GIUDIZIO SOSPESO Test a risposta multipla MODULO U.D Conoscenze Abilità Competenze Enunciato del primo principio della Calcolare l accelerazione
I collettori solari termici
 I collettori solari termici a cura di Flavio CONTI, ing. LUVINATE (Varese) Tel. 0332 821398 Collettori solari a BASSA temperatura I collettori solari a bassa temperatura utilizzati normalmente negli impianti
I collettori solari termici a cura di Flavio CONTI, ing. LUVINATE (Varese) Tel. 0332 821398 Collettori solari a BASSA temperatura I collettori solari a bassa temperatura utilizzati normalmente negli impianti
3 PROVE MECCANICHE DEI MATERIALI METALLICI
 3 PROVE MECCANICHE DEI MATERIALI METALLICI 3.1 Prova di trazione 3.1.3 Estensimetri La precisione e la sensibilità dello strumento variano a seconda dello scopo cui esso è destinato. Nella prova di trazione
3 PROVE MECCANICHE DEI MATERIALI METALLICI 3.1 Prova di trazione 3.1.3 Estensimetri La precisione e la sensibilità dello strumento variano a seconda dello scopo cui esso è destinato. Nella prova di trazione
Ricordiamo ora che a è legata ad x (derivata seconda) ed otteniamo
 ed otteniamo") Moto armonico semplice Consideriamo il sistema presentato in figura in cui un corpo di massa m si muove lungo l asse delle x sotto l azione della molla ideale di costante elastica k ed in assenza di forze
Moto armonico semplice Consideriamo il sistema presentato in figura in cui un corpo di massa m si muove lungo l asse delle x sotto l azione della molla ideale di costante elastica k ed in assenza di forze
Tutte le tecniche spettroscopiche si basano sulla interazione tra radiazione elettromagnetica e materia.
 G. Digilio - principi_v10 versione 6.0 LA SPETTROSCOPIA Tutte le tecniche spettroscopiche si basano sulla interazione tra radiazione elettromagnetica e materia. La Spettroscopia di risonanza magnetica
G. Digilio - principi_v10 versione 6.0 LA SPETTROSCOPIA Tutte le tecniche spettroscopiche si basano sulla interazione tra radiazione elettromagnetica e materia. La Spettroscopia di risonanza magnetica
POLITECNICO DI MILANO CORSO DI LAUREA ON LINE IN INGEGNERIA INFORMATICA ESAME DI FISICA
 1 POLITECNICO DI MILANO CORSO DI LAUREA ON LINE IN INGEGNERIA INFORMATICA ESAME DI FISICA Per ogni punto del programma d esame vengono qui di seguito indicate le pagine corrispondenti nel testo G. Tonzig,
1 POLITECNICO DI MILANO CORSO DI LAUREA ON LINE IN INGEGNERIA INFORMATICA ESAME DI FISICA Per ogni punto del programma d esame vengono qui di seguito indicate le pagine corrispondenti nel testo G. Tonzig,
Misure di spostamento e dimensionali
 Misure di spostamento e dimensionali Pag. 1 Figura 4.5 Effetto di carico del potenziometro Pag. 2 Figura 4.6 Costruzione di potenziometri a filamento avvolto UNIVERSITA DI FIRENZE Pag. 3 Figura 4.7 Risoluzione
Misure di spostamento e dimensionali Pag. 1 Figura 4.5 Effetto di carico del potenziometro Pag. 2 Figura 4.6 Costruzione di potenziometri a filamento avvolto UNIVERSITA DI FIRENZE Pag. 3 Figura 4.7 Risoluzione
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
LE TORRI: DISCOVERY e COLUMBIA
 LE TORRI: DISCOVERY e COLUMBIA Osservazioni e misure a bordo Le tue sensazioni e l accelerometro a molla 1) Nelle due posizioni indicate dalle frecce indica le sensazioni ricevute rispetto al tuo peso
LE TORRI: DISCOVERY e COLUMBIA Osservazioni e misure a bordo Le tue sensazioni e l accelerometro a molla 1) Nelle due posizioni indicate dalle frecce indica le sensazioni ricevute rispetto al tuo peso
Problemi di dinamica del punto materiale (moto oscillatorio) A Sistemi di riferimento inerziali
 A Sistemi di riferimento inerziali") Problemi di dinamica del punto materiale (moto oscillatorio) A Sistemi di riferimento inerziali Problema n. 1: Un corpo puntiforme di massa m = 2.5 kg pende verticalmente dal soffitto di una stanza essendo
Problemi di dinamica del punto materiale (moto oscillatorio) A Sistemi di riferimento inerziali Problema n. 1: Un corpo puntiforme di massa m = 2.5 kg pende verticalmente dal soffitto di una stanza essendo
Motori brushless. Alimentando il motore e pilotando opportunamente le correnti I in modo che siano come nella figura 2 si nota come
 49 Motori brushless 1. Generalità I motori brushless sono idealmente derivati dai motori in DC con il proposito di eliminare il collettore a lamelle e quindi le spazzole. Esistono due tipi di motore brushless:
49 Motori brushless 1. Generalità I motori brushless sono idealmente derivati dai motori in DC con il proposito di eliminare il collettore a lamelle e quindi le spazzole. Esistono due tipi di motore brushless:
. Si determina quindi quale distanza viene percorsa lungo l asse y in questo intervallo di tempo: h = v 0y ( d
 Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
Sensore orientamento satellite TIsat-1
 SUPSI DTI Progetto di semestre estivo O3 05/06 SE 03 Sensore orientamento satellite TIsat-1 Studenti: Relatore: Correlatore: Committente: Alessandra Altmann Igor Benaglio Allen Weston Renato Pamini SUPSI
SUPSI DTI Progetto di semestre estivo O3 05/06 SE 03 Sensore orientamento satellite TIsat-1 Studenti: Relatore: Correlatore: Committente: Alessandra Altmann Igor Benaglio Allen Weston Renato Pamini SUPSI
LA LEGGE DI GRAVITAZIONE UNIVERSALE
 GRAVIMETRIA LA LEGGE DI GRAVITAZIONE UNIVERSALE r La legge di gravitazione universale, formulata da Isaac Newton nel 1666 e pubblicata nel 1684, afferma che l'attrazione gravitazionale tra due corpi è
GRAVIMETRIA LA LEGGE DI GRAVITAZIONE UNIVERSALE r La legge di gravitazione universale, formulata da Isaac Newton nel 1666 e pubblicata nel 1684, afferma che l'attrazione gravitazionale tra due corpi è
19 Il campo elettrico - 3. Le linee del campo elettrico
 Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10. Angelo Bonomi
 GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10 Angelo Bonomi CONSIDERAZIONI SUL MONITORAGGIO Un monitoraggio ottimale dipende dalle considerazioni seguenti:
GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10 Angelo Bonomi CONSIDERAZIONI SUL MONITORAGGIO Un monitoraggio ottimale dipende dalle considerazioni seguenti:
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P39 10. Serie P42 12. Serie P57 14. Serie P60 16. Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
Gli attuatori. Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo
 Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Seconda Legge DINAMICA: F = ma
 Seconda Legge DINAMICA: F = ma (Le grandezze vettoriali sono indicate in grassetto e anche in arancione) Fisica con Elementi di Matematica 1 Unità di misura: Massa m si misura in kg, Accelerazione a si
Seconda Legge DINAMICA: F = ma (Le grandezze vettoriali sono indicate in grassetto e anche in arancione) Fisica con Elementi di Matematica 1 Unità di misura: Massa m si misura in kg, Accelerazione a si
Anche nel caso che ci si muova e si regga una valigia il lavoro compiuto è nullo: la forza è verticale e lo spostamento orizzontale quindi F s =0 J.
 Lavoro Un concetto molto importante è quello di lavoro (di una forza) La definizione di tale quantità scalare è L= F dl (unità di misura joule J) Il concetto di lavoro richiede che ci sia uno spostamento,
Lavoro Un concetto molto importante è quello di lavoro (di una forza) La definizione di tale quantità scalare è L= F dl (unità di misura joule J) Il concetto di lavoro richiede che ci sia uno spostamento,
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Esempio Esame di Fisica Generale I C.d.L. ed.u. Informatica
 Esempio Esame di Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. 1d (giorno) contiene all incirca (a) 8640 s; (b) 9 10 4 s; (c) 86 10 2 s; (d) 1.44 10 3 s; (e) nessuno di questi valori. 2. Sono
Esempio Esame di Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. 1d (giorno) contiene all incirca (a) 8640 s; (b) 9 10 4 s; (c) 86 10 2 s; (d) 1.44 10 3 s; (e) nessuno di questi valori. 2. Sono
IL CAMPO MAGNETICO. V Scientifico Prof.ssa Delfino M. G.
 IL CAMPO MAGNETICO V Scientifico Prof.ssa Delfino M. G. UNITÀ - IL CAMPO MAGNETICO 1. Fenomeni magnetici 2. Calcolo del campo magnetico 3. Forze su conduttori percorsi da corrente 4. La forza di Lorentz
IL CAMPO MAGNETICO V Scientifico Prof.ssa Delfino M. G. UNITÀ - IL CAMPO MAGNETICO 1. Fenomeni magnetici 2. Calcolo del campo magnetico 3. Forze su conduttori percorsi da corrente 4. La forza di Lorentz
Cap 3.1- Prima legge della DINAMICA o di Newton
 Parte I Cap 3.1- Prima legge della DINAMICA o di Newton Cap 3.1- Prima legge della DINAMICA o di Newton 3.1-3.2-3.3 forze e principio d inerzia Abbiamo finora studiato come un corpo cambia traiettoria
Parte I Cap 3.1- Prima legge della DINAMICA o di Newton Cap 3.1- Prima legge della DINAMICA o di Newton 3.1-3.2-3.3 forze e principio d inerzia Abbiamo finora studiato come un corpo cambia traiettoria
Veloci, Economiche, Scalabili: Tecnologie Magnetiche per l Automazione
 TECHNICAL ARTICLE Veloci, Economiche, Scalabili: Tecnologie Magnetiche per l Automazione La famiglia degli attuatori magnetici diretti include motori lineari e voice coil e offre dei vantaggi rispetto
TECHNICAL ARTICLE Veloci, Economiche, Scalabili: Tecnologie Magnetiche per l Automazione La famiglia degli attuatori magnetici diretti include motori lineari e voice coil e offre dei vantaggi rispetto
STRUMENTAZIONE GEOTECNICA DI MONITORAGGIO. ovvero Strumentazione geotecnica tradizionale utilizzata per il monitoraggio dei movimenti franosi
 5 maggio 2005 - Corso di Laboratorio Monitoraggio Frane STRUMENTAZIONE GEOTECNICA DI MONITORAGGIO ovvero Strumentazione geotecnica tradizionale utilizzata per il monitoraggio dei movimenti franosi FINALITA
5 maggio 2005 - Corso di Laboratorio Monitoraggio Frane STRUMENTAZIONE GEOTECNICA DI MONITORAGGIO ovvero Strumentazione geotecnica tradizionale utilizzata per il monitoraggio dei movimenti franosi FINALITA
Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012
 Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012 Problema 1 Due carrelli A e B, di massa m A = 104 kg e m B = 128 kg, collegati da una molla di costante elastica k = 3100
Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012 Problema 1 Due carrelli A e B, di massa m A = 104 kg e m B = 128 kg, collegati da una molla di costante elastica k = 3100
DAKTON Manuale J-BOX J-BOX Manuale
 J-BOX Manuale J-BOX è un espansione per n.4 sensori aggiuntivi da applicare ad un sistema costituito già da Dashboard e µ-box. I sensori disponibili con J-BOX sono: -POSIZIONE PEDALI (acceleratore e freno)
J-BOX Manuale J-BOX è un espansione per n.4 sensori aggiuntivi da applicare ad un sistema costituito già da Dashboard e µ-box. I sensori disponibili con J-BOX sono: -POSIZIONE PEDALI (acceleratore e freno)
L'impulso di una forza che varia nel tempo
 Lezione 13 approfondimento pag.1 L'impulso di una forza che varia nel tempo Un riassunto di quel che sappiamo Riprendiamo in esame il solito carrellino che si trova sopra la rotaia a basso attrito. Se
Lezione 13 approfondimento pag.1 L'impulso di una forza che varia nel tempo Un riassunto di quel che sappiamo Riprendiamo in esame il solito carrellino che si trova sopra la rotaia a basso attrito. Se
SCIENZE INTEGRATE FISICA
 CLASSE DISCIPLINA ORE SETTIMANALI TIPO DI PROVA PER GIUDIZIO SOSPESO MODULO 1: Il moto e l energia I concetti di sistema di riferimento e le grandezze cinematiche. I diversi tipi di rappresentazione del
CLASSE DISCIPLINA ORE SETTIMANALI TIPO DI PROVA PER GIUDIZIO SOSPESO MODULO 1: Il moto e l energia I concetti di sistema di riferimento e le grandezze cinematiche. I diversi tipi di rappresentazione del
Distanziometro Laser ad alta velocità IDP-RFD100K CARATTERISTICHE: DESCRIZIONE:
 Distanziometro Laser ad alta velocità CARATTERISTICHE: Elevata velocità di acquisizione pari a 100Ksps (T acq =10us) Elevata accuratezza fino a ±5mm Elevata ripetibilità fino a ±0.2mm Distanza di misura
Distanziometro Laser ad alta velocità CARATTERISTICHE: Elevata velocità di acquisizione pari a 100Ksps (T acq =10us) Elevata accuratezza fino a ±5mm Elevata ripetibilità fino a ±0.2mm Distanza di misura
LA CORRENTE ELETTRICA Prof. Erasmo Modica erasmo@galois.it
 LA CORRENTE ELETTRICA Prof. Erasmo Modica erasmo@galois.it L INTENSITÀ DELLA CORRENTE ELETTRICA Consideriamo una lampadina inserita in un circuito elettrico costituito da fili metallici ed un interruttore.
LA CORRENTE ELETTRICA Prof. Erasmo Modica erasmo@galois.it L INTENSITÀ DELLA CORRENTE ELETTRICA Consideriamo una lampadina inserita in un circuito elettrico costituito da fili metallici ed un interruttore.
Modulo di Meccanica e Termodinamica
 Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
TOP CUT 500 ALLESTIMENTO BASE (A)
") TOP CUT 500 E una fresa a ponte, completamente costruita in fusione di ghisa, il movimento degli assi avviene su guide a ricircolo di sfere, mediante cremagliere ad alta precisione, riduttori a gioco ridotto
TOP CUT 500 E una fresa a ponte, completamente costruita in fusione di ghisa, il movimento degli assi avviene su guide a ricircolo di sfere, mediante cremagliere ad alta precisione, riduttori a gioco ridotto
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
Pressione. Esempio. Definizione di pressione. Legge di Stevino. Pressione nei fluidi EQUILIBRIO E CONSERVAZIONE DELL ENERGIA NEI FLUIDI
 Pressione EQUILIBRIO E CONSERVAZIONE DELL ENERGIA NEI FLUIDI Cos è la pressione? La pressione è una grandezza che lega tra di loro l intensità della forza e l aerea della superficie su cui viene esercitata
Pressione EQUILIBRIO E CONSERVAZIONE DELL ENERGIA NEI FLUIDI Cos è la pressione? La pressione è una grandezza che lega tra di loro l intensità della forza e l aerea della superficie su cui viene esercitata
La propagazione delle onde luminose può essere studiata per mezzo delle equazioni di Maxwell. Tuttavia, nella maggior parte dei casi è possibile
 Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
APPLICATION SHEET Luglio
 Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Quantità di moto. Per un corpo puntiforme possiamo definire la grandezza vettoriale quantità di moto come il prodotto m v.
 Quantità di moto Per un corpo puntiforme possiamo definire la grandezza vettoriale quantità di moto come il prodotto m v. La seconda legge di Newton può essere scritta con la quantità di moto: d Q F =
Quantità di moto Per un corpo puntiforme possiamo definire la grandezza vettoriale quantità di moto come il prodotto m v. La seconda legge di Newton può essere scritta con la quantità di moto: d Q F =
Idrostatica Correnti a pelo libero (o a superficie libera) Correnti in pressione. Foronomia
 Correnti in pressione. Foronomia") Idrostatica Correnti a pelo libero (o a superficie libera) Correnti in pressione Foronomia In idrostatica era lecito trascurare l attrito interno o viscosità e i risultati ottenuti valevano sia per i liquidi
Idrostatica Correnti a pelo libero (o a superficie libera) Correnti in pressione Foronomia In idrostatica era lecito trascurare l attrito interno o viscosità e i risultati ottenuti valevano sia per i liquidi
Progetto La fisica nelle attrazioni Attrazione NIAGARA Dati Utili
 Progetto La fisica nelle attrazioni Attrazione NIAGARA Dati Utili Angolo di risalita = 25 Altezza massima della salita = 25,87 m Altezza della salita nel tratto lineare (fino all ultimo pilone di metallo)
Progetto La fisica nelle attrazioni Attrazione NIAGARA Dati Utili Angolo di risalita = 25 Altezza massima della salita = 25,87 m Altezza della salita nel tratto lineare (fino all ultimo pilone di metallo)
GEOMETRIA DELLE MASSE
 1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
Per questo motivo negli accelerometri : ζ=0.67
 Accelerometri Funzione di trasferimento: Accelerazione da misurare W(s) Spostamento relativo tra massa sismica e base di fissaggio dell accelerometro 1 Diff.Spostamento( s ) W ( s) = = AccelerazioneBase(
Accelerometri Funzione di trasferimento: Accelerazione da misurare W(s) Spostamento relativo tra massa sismica e base di fissaggio dell accelerometro 1 Diff.Spostamento( s ) W ( s) = = AccelerazioneBase(
Le macchine elettriche
 Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;