PLC e Controlli Numerici per Motion Control
|
|
|
- Eduardo Basso
- 8 anni fa
- Visualizzazioni
Transcript
1 .. PLC e Controlli Numerici per Motion Control

2 Sistemi per il Motion Control Argomenti Esposti Sistemi di azionamento Soluzioni basate su PC Controlli Numerici Elementi caratteristici di un sistema per Motion Control PLC Struttura Sistemi di programmazione Moduli dedicati al Motion Control Soluzioni Hardware e Software per il Motion Control Caratteristiche funzionali Principali configurazioni

3 Sistemi di Azionamento I sistemi di azionamento sono i principali attori per il Motion Control Permettono di introdurre l'energia necessaria a compiere attività di assemblaggio, movimentazione In impianti complessi più sistemi di azionamento devono essere fra loro coordinati Impianti di montaggio Macchine automatiche Robot

4 Sistemi di Azionamento Configurazione Azionamenti Nelle versioni più semplici permettono di regolare il flusso di energia dalla sorgente verso il motore (PWM) Nelle soluzioni digitali oggi disponibili Una parte delle funzioni del sistema di controllo può essere integrata nell'azionamento assieme all'alimentatore Controllo della corrente (coppia erogata) Controllo della velocità del motore Controllo della posizione del motore
 Controllo della velocità del motore Controllo della posizione")
 Le soluzioni coinvolgono sia la parte Hardware che la parte Software Ctr")
5 Sistemi di Azionamento Chiusura degli anelli di controllo del singolo asse possono essere realizzati da: Azionamento stesso Motion Controller Coordinamento di più assi secondo uno specifico profilo di moto Affidato ad un sistema centralizzato (Motion Controller) Le soluzioni coinvolgono sia la parte Hardware che la parte Software Ctr Az M
 Le soluzioni coinvolgono sia la parte Hardware che la parte Software Ctr")
6 Sistemi per il Motion Control È possibile attualmente distinguere quattro principali tipologie di configurazione per la distribuzione delle attività di generazione del profilo di moto ed applicazione dell'algoritmo di controllo del moto: 1) Profilo di moto ed algoritmo di controllo elaborato dal MC a) Anello di coppia o velocità chiuso sull'azionamento 2) Profilo di moto elaborato dal master e chiusura degli anelli da parte degli azionamenti 3) Profilo di moto ed algoritmo di controllo elaborato dall'azionamento 4) Profilo di moto generato off-line e preimpostato sull'azionamento, chiusura degli anelli da parte dell'azionamento
 Profilo di moto generato off-line e preimpostato sull'azionamento, chiusura degli anelli da parte")
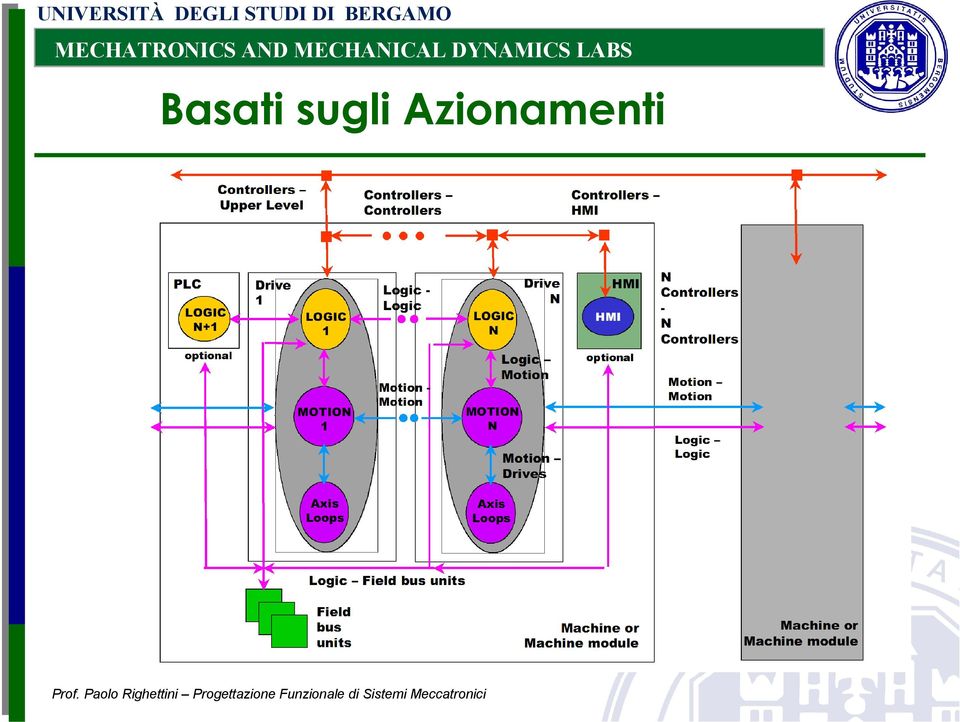
7 Soluzioni per il Motion Control Basate sui soli Azionamenti A basso investimento iniziale, funzioni verticalizzate sul fornitore di azionamenti Anelli di controllo di posizione chiusi sugli Azionamenti Basate su PLC Maggior flessibilità e possibilità di configurazione rispetto al caso precedente Maggiore portabilità Anelli di controllo di posizione chiusi sugli Azionamenti Basate su PC o CNC Maggiore flessibilità e capacità di interpolazione dei movimenti Possibilità di introdurre leggi di controllo complesse (anche controlli in forza) Anelli di controllo chiusi a livello di: Azionamento (posizione) Motion Controller (posizione/forza)
 Anelli di controllo chiusi a livello di: Azionamento (posizione) Motion")
8 Basati sugli Azionamenti
9 Basati su PLC

10 Basati su PC/CNC

11 Elementi caratteristici Elementi caratteristici delle soluzioni per il Motion Control Piattaforma Software Per la scrittura del programma di controllo macchina (interpolazione assi, fasi di azzeramento, ecc.) Per la gestione/elaborazione del controllo di un singolo asse Piattaforme Hardware digitali per l'esecuzione del programma di controllo di basso livello del singolo asse Per l'esecuzione del programma di funzionamento del sistema nel suo complesso (programma utente) Moduli Hardware per l'interazione con gli azionamenti ingressi/uscite analogici o digitali Bus di campo digitali general purpose (CanOpen, ProfiBus, ecc.) Bus di campo dedicati (ProfiMotion, SERCOS, ecc.)
 Moduli Hardware per l'interazione con gli azionamenti")
12 PLC- Introduzione introdotti sul finire degli anni 60 Con le seguenti caratteristiche: Svilupapti per offrire le medesime funzionalità delle logiche a relè allora utilizzate nei sistemi di automazione Essere programmabili Riutilizzabili ed affidabili Resistenti in ambienti ostili Privi di hard-disk, dotati di batteria tampone Avviabili in pochi secondi Programmazione di tipo ladder

13 PLC- Introduzione Un PLC è un sistema digitale specializzato per il controllo di macchine e processi Utilizza una memoria di programmazione in cui impostare istruzioni e specifiche funzioni per Controllo On/Off Timing Counting Sequenziatori Data handling Ecc..

14 PLC- Introduzione Innovazione introdotto con i PLC Flessibilità Elevata velocità di risposta Elementi allo stato solido (nessun elemento in movimento) Struttura modulare Possibilità di gestire sistemi molto complessi Set di istruzioni elevato e personalizzabile Economico

15 PLC- Vantaggi Elimina il cablaggio in favore di un opportuno programma di controllo Facilità di validazione Comunicazione fra PLC ed altri dispositivi a livello aziendale Elevata velocità di risposta Il programma sviluppato può essere caricato su più PLC per realizzare la medesima funzione Operazioni in Real Time Necessaria per garantire ripetibilità ed alta cadenza produttiva

16 PLC - Architettura È costituito da una unità centrale e da una serie di unità periferiche

17 PLC - Architettura Le unità sono normalmente collegate da moduli tra di loro interconnessi per mezzo di un bus parallelo o seriale


 in funzione delle decisioni prese dal")
18 PLC - Architettura L'unità centrale (o CPU) ha il compito di eseguire ciclicamente il programma utente Ciclicamente esegue: Acquisizione dei segnali dal campo (ingressi) Elabora il programma utente Pilota le i segnali verso il campo (uscite) in funzione delle decisioni prese dal programma utente
 in funzione delle decisioni prese dal")
19 PLC - Architettura Scansione ciclica e sincrona degli ingressi Elaborazione del segnale Pilotaggio delle uscite LETTURA DELLO STATO DEGLI INGRESSI ELABORAZIONE SEQUENZIALE DEL PROGRAMMA ATTIVAZIONE SEQUENZIALE DI TUTTE LE USCITE

20 PLC - Architettura Le funzioni di interfacciamento con il campo (ingressi ed uscite) sono realizzate da opportune schede di ingresso ed uscita Il tipo di schede dipende Dal segnale da trattare/elaborale (analogico/digitale/optoisolamento/termoco ppie/ecc.) Numero di segnali È possibile utilizzare comunicazione campo) anche schede (seriali/ethernet/bus di di
 Numero di segnali È possibile utilizzare comunicazione campo) anche schede")
21 PLC - Architettura Possono essere collegati dei moduli remoti di I/O Possono avere forma compatta (senza moduli) Il collegamento con il PLC avviene generalmente per mezzo di Bus di Campo Soluzioni a bassissimo costo Limitato numero di I/O
22 Software per PLC Per realizzare il programma che un PLC deve eseguire ogni produttore mette a disposizione un sistema di sviluppo: si tratta di un ambiente software che permette la scrittura e il test dei programmi Il sistema di sviluppo è solitamente un PC, tuttavia esistono anche dei piccoli terminali per la programmazione, che sono piuttosto utili in fase di collaudo sull impianto date le loro dimensioni molto ridotte e la semplicità d uso
23 Software per PLC Nell'implementazione di un programma per un PLC si possono distinguere due fasi: 1) la fase "off-line" di realizzazione nella quale sistema di sviluppo e PLC non sono collegati. 2) la fase "on-line" in cui il programma realizzato viene trasferito nel PLC e provato. Il collegamento tra sistema di sviluppo e il PLC (necessariamente presente in questa fase) permette di usufruire di tutti i tool a disposizione per il test dei programmi quali ad esempio il forzamento di variabili, la lettura del loro stato, l impostazione di break- point nel programma, ecc.
24 Software per PLC Tutti i PLC oggi in commercio mettono a disposizione un ambiente di programmazione standardizzato Basato sulla normativa IEC Prevede 5 principali linguaggi: Ladder Sequenatial Functional Chart (SFC) Functional Block Diagram (FBD) Instruction List (IL) Structured Text (ST)
25 Software per PLC Ladder Derivato dai disegni dei sistemi di controllo realizzati relé elettormeccanici rappresentazione grafica dei dove i contatti identificano variabili del programma I collegamenti tra i contatti rappresentano le operazioni booleane
26 Software per PLC Ladder Questo linguaggio deriva dai primi impieghi dei PLC, che in pratica sostituivano delle logiche cablate realizzate con dei relè, e risulta essere di comprensione immediata, le sue potenzialità sono però piuttosto limitate E tuttavia il caso di osservare che il linguaggio a contatti è ancora molto diffuso soprattutto per i PLC di produzione americana e per utenti dell ambiente elettro-meccanico.
27 Software per PLC I simboli nello schema rappresentano istruzioni Input Output I numeri o le etichette rappresentano indirizzi Da dove leggere Dove scrivere
28 Software per PLC Sequenatial Functional Chart (SFC) Basato sui concetti di fase (entro cui si eseguono azioni) e di transizione (con cui, al verificarsi di certe condizioni, si passa da un certo insieme di fasi attive ad un altro) E' derivato dalle reti di Petri (approccio per descrivere gli stati ed evoluzione di un sistema) Spesso SFC è usato come strumento di specifica (descrizione della funzione richiesta) Mette in evidenza gli stati (fasi) principali del sistema (ad alto livello) Avvio Riempimento di un serbatoio Svuotamento di un secondo serbatoio
29 Software per PLC Le fasi (stati )sono rappresentate da rettangoli La transizione definisce la condizione logica (eventi) per cui la transizione precedente termina Le fasi sono collegati da linee. Ogni linea ha una barra orizzontale rappresentante una transizione La transizione fa riferimento a condizione logica o a segnali esterni letti dal campo È possibili introdurre percorsi Ciclici Alternativi paralleli START Start Switch = 1 Riempimento Serb. Pieno = 1 lavorazione Lavorazione 1h svuotamento Start Switch = 0 stop
30 Software per PLC START Start Switch = 1 Perc. divergente Riempimento Trans. 3 filtraggio Serb. Pieno = 1 lavorazione Lavorazione 1h Trans. 4 Perc. convergente svuotamento Start Switch = 0 stop Start Switch = 1
31 Software per PLC Functional Block Diagram (FBD) analogo ai diagrammi circuitali, in cui le connessioni rappresentano i percorsi dei segnali tra i componenti Un blocco funzionale ha due caratteristiche principali, ovvero la definizione dei dati (ingressi e uscite) e un algoritmo che processa i valori correnti degli ingressi e delle variabili interne (locali o globali) e produce i nuovi valori delle uscite.
32 Software per PLC Instruction List (IL) è un linguaggio di basso livello molto simile all assembler. E adatto per compiti molto specifici quali l interfacciamento di hardware particolare. è disponibile per tutti i PLC. Structured Text (ST) è un linguaggio testuale ad alto livello, simile al PASCAL o ad alcuni BASIC.
33 PLC Motion Control I PLC estendono le funzionalità di base (logiche) per poter introdurre il controllo del moto L'estensione viene permessa per mezzo di Function Block Ogni costruttore di PLC ha sviluppato la propria libreria per il motion control Non è generalmente prevista una sofisticata piattaforma sw per il controllo del moto Accanto alle FB per il controllo del moto sono previste delle corrispondenti schede di espansione del PLC che realizzano le funzioni di controllo del moto desiderate Anelli singoli in velocità o posizione Movimenti interpolati in posizione Gli algoritmi di controllo sono generalmente semplici, lineari, basati su strutture PID
34 PlcOpen Motion Control A livello internazionale l'associazione PLCopen ( propone una standardizzazione per il motion control con PLC Gli utilizzatori di sistemi Motion Control richiedono generalmente tre livelli di complessità: Basse prestazioni e basso costo Prestazioni medie Prestazioni elevate e alti costi Sono disponibili sul mercato molte soluzioni che offrono tools di sviluppo, installazione e manutenzione fra loro incompatibili Basati principalmente su soluzioni di tipo proprietario Queste incompatibilità portano ad un incremento dei costi: Processo di ingegnerizzazione diviene lungo e difficile Tempi di istruzione e di sviluppo si allungano Software non utilizzabile fra le varie soluzioni
35 PlcOpen Motion Control Un approccio standardizzato riduce gli effetti negativi citati Standardizzazione a livello di linguaggi di programmazione (come già fatto a livello IEC 61131) Standardizzazione verso diverse soluzioni per motion control Distribuito Integrato Centralizzato
36 PlcOpen Motion Control Processo di standardizzazione per mezzo della definizione di librerie e componenti riutilizzabili La programmazione è meno dipendente dall'hardware Il software applicativo è più riutilizzabile Si riduce il costo per la formazione e supporto Applicazione scalabile su diverse schemi di motion control
37 PlcOpen Motion Control Definizione di Funciotn Block per Motion Control Questo processo di standardizzazione dovrebbe coinvolgere circa 80% del mercato del motion control Obiettivi principali Influenza: Utente finale (costruttore di sistemi che richiedono motion control) Fornitori di sistemi di controllo per garantire la portabilità delle FB Semplicità Efficienza Consistenza (conforme con IEC-61131) Hardware indipendent Flessibile per sviluppi futuri Completo
38 PlcOpen Motion Control Sviluppato su tre moduli principali: Definizione della macchina a stati Descrive il comportamento dell'asse ad alto livello Definizione delle FB per soluzioni Singolo Asse e Multi Asse Per le operazioni elementari sugli assi o sui singoli assi Regole e dichiarazione di conformità
39 PlcOpen Motion Control Macchina a Stati Descrive il comportamento dell'asse ad alto livello Utile per definire la sequenza di programma di motion control Stati definiti Stand Still Homing Discrete Motion Continuos Motion Suynchronized Motion Stopping Error Stop Transizioni da uno stato all'altro

40 PlcOpen Motion Control Function Block MC_MoveAbsolute MC_MoveRelative MC_MoveAdditive MC_MoveSuperimposed MC_MoveVelocity, MC_Home MC_ReadStatus Muli Asse CamTableSelect CamIn, CamOut GearIn, GearOut
41 PlcOpen Motion Control Principali FB
42 PlcOpen Motion Control Semplice gestione di un singolo asse Limitata possibilità di sviluppo di soluzioni con complesse soluzioni di interpolazione asse Profili di moto limitato Interpolazione fra assi per mezzo di tabelle o profili di moto I vincoli possono essere cambiati on line Impossibilità di introdurre strutture con controllo in forza Risolve la maggior parte delle problematiche delle macchine automatiche per Packaging Assemblaggio
43 PlcOpen Motion Control Riduzione del numero delle parti

44 PlcOpen Motion Control Camming, assi Master/Slave Postion Slave Master Position

45 PlcOpen Motion Control Gearing
46 PLC vs PC Condividono la medesima architettura di base PLC Operano in ambiente industriale Ambiente di programmazione standard Generalmente senza tastiere/video grafico/cd Comunicano con l'operatore per mezzo di opportune porte PC Strumenti di programmazione molto più potenti e flessibili Maggiore possibilità di interfacciamento con l'operatore Ambiente dinamico, Hardware con più potenza di calcolo Possono essere dotati di opportune schede in modo che possano interfacciarsi con il campo (ingressi/uscite) Possono essere dotati di sistemi di programmazione identici a quelli disponibili su PLC
47 Sistemi di controllo basato su PC Abbattimento iniziale dei costi Integrazione di Hardware commerciale a basso costo Basato su soluzioni industriali (testate temperatura e campi elettromagnetici) in Esistono soluzioni standardizzate Necessitano dello sviluppo delle sole applicazioni Software dedicate Facile scambio di dati con altri sistemi Facile ed economica verticalizzazione del prodotto Interfacce verso l'operatore e altri sistemi digitali altamente attrattivi per l'utente finale
48 Sistemi di controllo basato su PC Tutte le funzioni richieste funzionano sullo stesso Hw Interazione con gli azionamenti ed il campo Programma di Motion Control Interazione con l'operatore (HMI)
49 Sistemi di controllo basato su PC Piattaforma Hw per Sistema Operativo Real Time e Software per Motion Control Basso costo per l'utilizzo di piattaforme commerciali standardizzate Elevate prestazioni computazionali Deve essere sviluppato il software per il motion control soluzioni proprietarie basate eventualmente su opportune librerie In parte ci si può avvalere della soluzione SoftPLC (basato su SW conforme a IEC-61131) Formati standard costituiti principalmente da: Scheda Madre Bus standard di collegamento con le periferiche (ISA/PCI/PCIe) Schede di espansione verso il campo (I/O analogico/digitale/bus di campo)

50 Sistemi di controllo basato su PC Il Motion Controller dovrà avere una opportuna configurazione Hw/Sw per supportare la flessibilità offerta dai sistemi di interfacciamento con il campo Sistema operativo RT Schede di interfacciamento verso il campo Software per l'interfacciamento con l'operatore
51 Sistemi di controllo basato su PC Principali piattaforme Hardware PC/104 (96x90) Fan Less Standard diffuso da più di 10 anni CPU fino alla classe Pentium Bus di espansione PCI Ampia scelta di schede di espansione Prestazioni limitate EBX 5.25 (146x203) Fan Less CPU fino alla classe Pentium Bus di espansione PCI Bus di espansione standard Maggior potenza rispetto a PC/104 Controllore Grafico integrato
52 Sistemi di controllo basato su PC Principali piattaforme Hardware Industrial MiniATX (170x170) 1 slot di espansione PCI Maggior potenza di calcolo Controllore Grafico integrato Periferiche standard Doppia porta di rete Industrial ATX (304x244) Fino a 7 slot di espansione Processori più potenti Controllore Grafico integrato Elevata espandibilità per schede di interfacciamento verso il campo
53 Sistemi di controllo basato su PC Principali piattaforme Hardware PICMG Elevata potenza di calcolo Elevata espandibilità grazie al bus passivo Elevato costo complessivo Scheda madre Bus passivo cabinet
54 Sistemi di controllo basato su PC HW CPU PICMG BUS passivo Scheda interfacciamento Sensoray encoder in 4 Analog out Sistema operativo RT Software RTAI, RTLINUX, vxworks, QNX, LynxOS di basso livello singolo/multi asse Alto per livello per dell'applicazione la lo gestione sviluppo
55 Controlli Numerici Il mercato offre Controlli Numerici che: Realizzati su piattaforme Hw generalmente basate su PC industriali Sistema operativo RT Opportune schede di interfacciamento verso il campo Software e librerie per motion control in generale Applicazioni a sistemi ampiamente diffusi quali le macchine utensili e macchine con movimenti nel piano Costo proporzionale al numero di assi controllato ed al tipo di controllore installato Per alcuni campi applicativi (Macchine Utensili) mettono a disposizione un linguaggio standardizzato per il pilotaggio dei movimenti degli assi
56 Controlli Numerici Interfacce utente predisposte (standardizzate) Configurabilità dei moduli di interfacciamento con gli azionamenti Soluzioni complete chiavi in mano Ambiente di programmazione dedicato al motion control
57 Controlli Numerici Parecchi fornitori presenti sul mercato Il software sviluppato è verticalizzato sul prodotto acquistato
NORMA CEI EN 61131. PLC: programmazione. PLC: programmazione. PLC: programmazione. Automazione Industriale 3. Automazione Industriale
 NORMA CEI EN 61131 Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 La normativa IEC 1131 del 1993 ha standardizzato 5
NORMA CEI EN 61131 Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 La normativa IEC 1131 del 1993 ha standardizzato 5
La tecnica proporzionale
 La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
Gruppo Esea Software plc
 Gruppo Esea Software plc La prima regola di ogni tecnologia usata negli affari è che l automazione applicata ad una operazione efficiente ne ingrandirà l efficienza. La seconda è che l automazione applicata
Gruppo Esea Software plc La prima regola di ogni tecnologia usata negli affari è che l automazione applicata ad una operazione efficiente ne ingrandirà l efficienza. La seconda è che l automazione applicata
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
Il sistema Mitrol si presenta come un pannello operatore dotato di display LCD a colori con Touch Screen, all interno del quale è installata
 Il sistema Mitrol si presenta come un pannello operatore dotato di display LCD a colori con Touch Screen, all interno del quale è installata tipicamente una monoscheda, contenente tutte le CPU richieste
Il sistema Mitrol si presenta come un pannello operatore dotato di display LCD a colori con Touch Screen, all interno del quale è installata tipicamente una monoscheda, contenente tutte le CPU richieste
Il servizio di registrazione contabile. che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili
 Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como LOGICA DI CONTROLLO
 Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Software di sistema e software applicativo. I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche
 Software di sistema e software applicativo I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche Software soft ware soffice componente è la parte logica
Software di sistema e software applicativo I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche Software soft ware soffice componente è la parte logica
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
FONDAMENTI di INFORMATICA L. Mezzalira
 FONDAMENTI di INFORMATICA L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software
FONDAMENTI di INFORMATICA L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software
Automazione Direzione Progetto Progettazione HSRIO
 HSRIO_BROCHURE.DOC HSRIO HIGH SPEED REMOTE INPUT OUTPUT Nome documento: Hsrio_Brochure.doc Responsabile: Bassignana Luigi Data: 01/04/2008 1 DESCRIZIONE Sistema modulare di IO remoto ad alta velocità,
HSRIO_BROCHURE.DOC HSRIO HIGH SPEED REMOTE INPUT OUTPUT Nome documento: Hsrio_Brochure.doc Responsabile: Bassignana Luigi Data: 01/04/2008 1 DESCRIZIONE Sistema modulare di IO remoto ad alta velocità,
Architettura del calcolatore
 Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
2 Gli elementi del sistema di Gestione dei Flussi di Utenza
 SISTEMA INFORMATIVO page 4 2 Gli elementi del sistema di Gestione dei Flussi di Utenza Il sistema è composto da vari elementi, software e hardware, quali la Gestione delle Code di attesa, la Gestione di
SISTEMA INFORMATIVO page 4 2 Gli elementi del sistema di Gestione dei Flussi di Utenza Il sistema è composto da vari elementi, software e hardware, quali la Gestione delle Code di attesa, la Gestione di
P R O G E T T O L A R S A A P P U N T I S U L P. L. C.
 P R O G E T T O L A R S A A P P U N T I S U L P. L. C. L automazione di un qualunque procedimento industriale si ottiene mediante un insieme d apparecchiature, opportunamente collegate tra loro, in modo
P R O G E T T O L A R S A A P P U N T I S U L P. L. C. L automazione di un qualunque procedimento industriale si ottiene mediante un insieme d apparecchiature, opportunamente collegate tra loro, in modo
La piattaforma di lettura targhe intelligente ed innovativa in grado di offrire servizi completi e personalizzati
 La piattaforma di lettura targhe intelligente ed innovativa in grado di offrire servizi completi e personalizzati Affidabilità nel servizio precisione negli strumenti Chanda LPR Chanda LPR è una piattaforma
La piattaforma di lettura targhe intelligente ed innovativa in grado di offrire servizi completi e personalizzati Affidabilità nel servizio precisione negli strumenti Chanda LPR Chanda LPR è una piattaforma
" Soluzioni avanzate di telecontrollo con componenti standard di automazione: tecnologie Internet, M2M, IEC60870 "
 " Soluzioni avanzate di telecontrollo con componenti standard di automazione: tecnologie Internet, M2M, IEC60870 " Obiettivi Prevenzione malfunzionamenti riduzione disservizi conformità a standard minimi
" Soluzioni avanzate di telecontrollo con componenti standard di automazione: tecnologie Internet, M2M, IEC60870 " Obiettivi Prevenzione malfunzionamenti riduzione disservizi conformità a standard minimi
eeplc Applicazioni SlimLine Labelling Realtime Module per L'altro modo di etichettare
 Labelling Realtime Module per eeplc L'altro modo di etichettare : eeplc + Modulo Software Labelling Realtime 29 settembre 2008 Pag. 1 di 18. Premesse Dall'esperienza nella tecnologia Full Digital e nel
Labelling Realtime Module per eeplc L'altro modo di etichettare : eeplc + Modulo Software Labelling Realtime 29 settembre 2008 Pag. 1 di 18. Premesse Dall'esperienza nella tecnologia Full Digital e nel
CODESYS Motion + CNC: Il vostro Motion Control, facilmente sviluppato
 02/2014 CODESYS Motion + CNC: Il vostro Motion Control, facilmente sviluppato CODESYS Users' Conference 2014, Roland Wagner CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Motion task
02/2014 CODESYS Motion + CNC: Il vostro Motion Control, facilmente sviluppato CODESYS Users' Conference 2014, Roland Wagner CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Motion task
Approccio stratificato
 Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Servoazionamento Flessibile - Serie Hi-Drive
 www.parker-eme.com/hidrive Servoazionamento Flessibile - Serie Breve panoramica Descrizione è una serie di servoamplificatori completamente digitali ad elevate prestazioni per il controllo di motori brushless
www.parker-eme.com/hidrive Servoazionamento Flessibile - Serie Breve panoramica Descrizione è una serie di servoamplificatori completamente digitali ad elevate prestazioni per il controllo di motori brushless
PROGRAMMAZIONE DIDATTICA ANNUALE. SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica
 ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
INFORMATICA 1 L. Mezzalira
 INFORMATICA 1 L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software del modello
INFORMATICA 1 L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software del modello
Introduzione alle tecnologie informatiche. Strumenti mentali per il futuro
 Introduzione alle tecnologie informatiche Strumenti mentali per il futuro Panoramica Affronteremo i seguenti argomenti. I vari tipi di computer e il loro uso Il funzionamento dei computer Il futuro delle
Introduzione alle tecnologie informatiche Strumenti mentali per il futuro Panoramica Affronteremo i seguenti argomenti. I vari tipi di computer e il loro uso Il funzionamento dei computer Il futuro delle
Compatto, espandibile e potente. Il controller che cresce con l applicazione. www.kse.it
 Compatto, espandibile e potente. Il controller che cresce con l applicazione. www.kse.it Know-how per le industrie 1 KSE Touch Controller CNC con touch screen 7 + schede assi e IO Compatto, Veloce ed Produttivo.
Compatto, espandibile e potente. Il controller che cresce con l applicazione. www.kse.it Know-how per le industrie 1 KSE Touch Controller CNC con touch screen 7 + schede assi e IO Compatto, Veloce ed Produttivo.
Scopo della lezione. Informatica. Informatica - def. 1. Informatica
 Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Il controllo qualità con GOM nel settore Automotive
 Il controllo qualità con GOM nel settore Automotive La riduzione dei tempi di sviluppo prodotto e la riduzione dei costi forzano le aziende ad aumentare la loro efficienza. Parte importante di questo sforzo
Il controllo qualità con GOM nel settore Automotive La riduzione dei tempi di sviluppo prodotto e la riduzione dei costi forzano le aziende ad aumentare la loro efficienza. Parte importante di questo sforzo
Liceo Tecnologico. Indirizzo Elettrico Elettronico. Indicazioni nazionali per Piani di Studi Personalizzati
 Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Piano Nazionale di Formazione degli Insegnanti sulle Tecnologie dell'informazione e della Comunicazione. Percorso Formativo C1.
 Piano Nazionale di Formazione degli Insegnanti sulle Tecnologie dell'informazione e della Comunicazione Percorso Formativo C1 Modulo 2 Computer hardware 1 OBIETTIVI Identificare, descrivere, installare
Piano Nazionale di Formazione degli Insegnanti sulle Tecnologie dell'informazione e della Comunicazione Percorso Formativo C1 Modulo 2 Computer hardware 1 OBIETTIVI Identificare, descrivere, installare
Automazione e controllo
 Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
Sistemi informativi secondo prospettive combinate
 Sistemi informativi secondo prospettive combinate direz acquisti direz produz. direz vendite processo acquisti produzione vendite INTEGRAZIONE TRA PROSPETTIVE Informazioni e attività sono condivise da
Sistemi informativi secondo prospettive combinate direz acquisti direz produz. direz vendite processo acquisti produzione vendite INTEGRAZIONE TRA PROSPETTIVE Informazioni e attività sono condivise da
Simulazione di macchina: analisi virtuale del comportamento cinematico. Elio Bergamaschi
 Simulazione di macchina: analisi virtuale del comportamento cinematico Elio Bergamaschi - Simulazione: Progettazione, Costruzione & Test Virtuali Progettista meccanico Disegno Produzione Assemblaggio Messa
Simulazione di macchina: analisi virtuale del comportamento cinematico Elio Bergamaschi - Simulazione: Progettazione, Costruzione & Test Virtuali Progettista meccanico Disegno Produzione Assemblaggio Messa
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Automazione Industriale 4- Ingegneria del Software
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Automazione Industriale 4- Ingegneria del Software Cesare Fantuzzi (cesare.fantuzzi@unimore.it) Ingegneria Meccatronica
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Automazione Industriale 4- Ingegneria del Software Cesare Fantuzzi (cesare.fantuzzi@unimore.it) Ingegneria Meccatronica
Configurazione & Programmazione Profibus DP. in Ambiente Siemens TIA Portal
 Configurazione & Programmazione Profibus DP in Ambiente Siemens TIA Portal Configurazione Optional: Aggiungere File GSD Inserire Masters e Slaves Inserire Sottorete Profibus DP e collegare tutte le interfacce
Configurazione & Programmazione Profibus DP in Ambiente Siemens TIA Portal Configurazione Optional: Aggiungere File GSD Inserire Masters e Slaves Inserire Sottorete Profibus DP e collegare tutte le interfacce
ISTITUTO TECNICO ECONOMICO MOSSOTTI
 CLASSE III INDIRIZZO S.I.A. UdA n. 1 Titolo: conoscenze di base Conoscenza delle caratteristiche dell informatica e degli strumenti utilizzati Informatica e sistemi di elaborazione Conoscenza delle caratteristiche
CLASSE III INDIRIZZO S.I.A. UdA n. 1 Titolo: conoscenze di base Conoscenza delle caratteristiche dell informatica e degli strumenti utilizzati Informatica e sistemi di elaborazione Conoscenza delle caratteristiche
Struttura del calcolatore
 Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Sistemi di Automazione Industriale
 Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Creare una Rete Locale Lezione n. 1
 Le Reti Locali Introduzione Le Reti Locali indicate anche come LAN (Local Area Network), sono il punto d appoggio su cui si fonda la collaborazione nel lavoro in qualunque realtà, sia essa un azienda,
Le Reti Locali Introduzione Le Reti Locali indicate anche come LAN (Local Area Network), sono il punto d appoggio su cui si fonda la collaborazione nel lavoro in qualunque realtà, sia essa un azienda,
Input/Output. Moduli di Input/ Output. gestiscono quantità di dati differenti a velocità diverse in formati diversi. n Grande varietà di periferiche
 Input/Output n Grande varietà di periferiche gestiscono quantità di dati differenti a velocità diverse in formati diversi n Tutti più lenti della CPU e della RAM n Necessità di avere moduli di I/O Moduli
Input/Output n Grande varietà di periferiche gestiscono quantità di dati differenti a velocità diverse in formati diversi n Tutti più lenti della CPU e della RAM n Necessità di avere moduli di I/O Moduli
Programmable Logic Controllers - PLC
 Programmable Logic Controllers - PLC Introduzione! Negli anni sessanta i sistemi di automazione e controllo potevano essere implementati solo tramite circuiti a relè oppure con dispositivi allo stato solido
Programmable Logic Controllers - PLC Introduzione! Negli anni sessanta i sistemi di automazione e controllo potevano essere implementati solo tramite circuiti a relè oppure con dispositivi allo stato solido
IL PLC 1/9. permanente, la memoria volatile e i pin di I/O, oltre ad eventuali altri blocchi specializzati.
 IL PLC 1/9 Storia Il motivo per il quale nacque il PLC fu la necessità di eliminare i costi elevati per rimpiazzare i sistemi complicatissimi basati su relè. Nel anni 70 la società Beadford Associates
IL PLC 1/9 Storia Il motivo per il quale nacque il PLC fu la necessità di eliminare i costi elevati per rimpiazzare i sistemi complicatissimi basati su relè. Nel anni 70 la società Beadford Associates
L informatica INTRODUZIONE. L informatica. Tassonomia: criteri. È la disciplina scientifica che studia
 L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
INFORMATICA. Il Sistema Operativo. di Roberta Molinari
 INFORMATICA Il Sistema Operativo di Roberta Molinari Il Sistema Operativo un po di definizioni Elaborazione: trattamento di di informazioni acquisite dall esterno per per restituire un un risultato Processore:
INFORMATICA Il Sistema Operativo di Roberta Molinari Il Sistema Operativo un po di definizioni Elaborazione: trattamento di di informazioni acquisite dall esterno per per restituire un un risultato Processore:
PROTOTIPAZIONE DI UN TRADUTTORE DA SORGENTE PLC AD ASSEMBLY DI UNA MACCHINA VIRTUALE
 PROTOTIPAZIONE DI UN TRADUTTORE DA SORGENTE PLC AD ASSEMBLY DI UNA MACCHINA VIRTUALE Relatore: prof. Michele Moro Laureando: Marco Beggio Corso di laurea in Ingegneria Informatica Anno Accademico 2006-2007
PROTOTIPAZIONE DI UN TRADUTTORE DA SORGENTE PLC AD ASSEMBLY DI UNA MACCHINA VIRTUALE Relatore: prof. Michele Moro Laureando: Marco Beggio Corso di laurea in Ingegneria Informatica Anno Accademico 2006-2007
Architettura di un calcolatore
 2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
Architetture Applicative
 Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
CPU. Maurizio Palesi
 CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO
 PIANO DI LAVORO CLASSE 4 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: SISTEMI E MODELLI (30 ore)
PIANO DI LAVORO CLASSE 4 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: SISTEMI E MODELLI (30 ore)
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
Il software impiegato su un computer si distingue in: Sistema Operativo Compilatori per produrre programmi
 Il Software Il software impiegato su un computer si distingue in: Software di sistema Sistema Operativo Compilatori per produrre programmi Software applicativo Elaborazione testi Fogli elettronici Basi
Il Software Il software impiegato su un computer si distingue in: Software di sistema Sistema Operativo Compilatori per produrre programmi Software applicativo Elaborazione testi Fogli elettronici Basi
C. P. U. MEMORIA CENTRALE
 C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
Sistemi Informativi e Sistemi ERP
 Sistemi Informativi e Sistemi Trasformare i dati in conoscenza per supportare le decisioni CAPODAGLIO E ASSOCIATI 1 I SISTEMI INFORMATIVI LI - E IMPRESA SISTEMA DI OPERAZIONI ECONOMICHE SVOLTE DA UN DATO
Sistemi Informativi e Sistemi Trasformare i dati in conoscenza per supportare le decisioni CAPODAGLIO E ASSOCIATI 1 I SISTEMI INFORMATIVI LI - E IMPRESA SISTEMA DI OPERAZIONI ECONOMICHE SVOLTE DA UN DATO
Realizzare macchine sempre più ad alte performance riducendo il tempo dedicato alla progettazione.
 Realizzare macchine sempre più ad alte performance riducendo il tempo dedicato alla progettazione. Cristina Furini Product Expert Motion Control SAVE Verona 2013 Ad ogni necessità una soluzione Prima generazione
Realizzare macchine sempre più ad alte performance riducendo il tempo dedicato alla progettazione. Cristina Furini Product Expert Motion Control SAVE Verona 2013 Ad ogni necessità una soluzione Prima generazione
e automazione industriale
 Corso di Laurea Magistrale di Ingegneria Elettrica Corso di Sistemi e componenti per l automazione AA 2014-15 Azionamenti elettrici e automazione industriale Ezio Bassi, Francesco Benzi Università di Pavia
Corso di Laurea Magistrale di Ingegneria Elettrica Corso di Sistemi e componenti per l automazione AA 2014-15 Azionamenti elettrici e automazione industriale Ezio Bassi, Francesco Benzi Università di Pavia
I bus di campo nell automazione industriale
 I bus di campo nell automazione industriale Fabio Giorgi Introduzione Aspetti di comunicazione nell automazione industriale Esempio di cella di lavorazione Passaggio dal controllo centralizzato al controllo
I bus di campo nell automazione industriale Fabio Giorgi Introduzione Aspetti di comunicazione nell automazione industriale Esempio di cella di lavorazione Passaggio dal controllo centralizzato al controllo
SISTEMI DI ELABORAZIONE DELLE INFORMAZIONI
 SISTEMI DI ELABORAZIONE DELLE INFORMAZIONI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: martedì, 12.00-13.00. Dip. Di Matematica Modalità esame: scritto + tesina facoltativa 1
SISTEMI DI ELABORAZIONE DELLE INFORMAZIONI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: martedì, 12.00-13.00. Dip. Di Matematica Modalità esame: scritto + tesina facoltativa 1
Festo Mobile Electric Automation
 Festo Mobile Electric Automation 2 Electric Automation Panoramica Optimised Motion Series Schermo Controllo semplice di curve complesse Software Orientamento libero e flessibile Soluzioni di sicurezza
Festo Mobile Electric Automation 2 Electric Automation Panoramica Optimised Motion Series Schermo Controllo semplice di curve complesse Software Orientamento libero e flessibile Soluzioni di sicurezza
DISCIPLINA TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI
 DISCIPLINA TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI INDIRIZZO DI INFORMATICA E TELECOMUNICAZIONI ARTICOLAZIONE TELECOMUNICAZIONI Utilizzare consapevolmente gli strumenti
DISCIPLINA TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI INDIRIZZO DI INFORMATICA E TELECOMUNICAZIONI ARTICOLAZIONE TELECOMUNICAZIONI Utilizzare consapevolmente gli strumenti
Elenco unità capitalizzabili non presenti nello standard nazionale
 Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
Servoazionamento Digitale - TWIN-N & SPD-N
 Servoazionamento Digitale TWIN-N, SPD-N www.parker.com/eme/it/twinn Servoazionamento Digitale - TWIN-N & SPD-N Breve panoramica Descrizione TWIN-N è una serie di servoamplificatori completamente digitali,
Servoazionamento Digitale TWIN-N, SPD-N www.parker.com/eme/it/twinn Servoazionamento Digitale - TWIN-N & SPD-N Breve panoramica Descrizione TWIN-N è una serie di servoamplificatori completamente digitali,
Tecnologia dell Informazione
 Tecnologia dell Informazione Concetti di base della tecnologia dell informazione Materiale Didattico a cura di Marco Musolesi Università degli Studi di Bologna Sede di Ravenna Facoltà di Giurisprudenza
Tecnologia dell Informazione Concetti di base della tecnologia dell informazione Materiale Didattico a cura di Marco Musolesi Università degli Studi di Bologna Sede di Ravenna Facoltà di Giurisprudenza
SLAM NEW. Serie SLAM NEW e SLAM NEW COLOR... l'evoluzione continua! Visori
 SLAM NEW Serie SLAM NEW e SLAM NEW COLOR... l'evoluzione continua! I continui sviluppi della ricerca e della tecnologia elettronica mettono a disposizione del mercato nuovi componenti ogni giorno più evoluti
SLAM NEW Serie SLAM NEW e SLAM NEW COLOR... l'evoluzione continua! I continui sviluppi della ricerca e della tecnologia elettronica mettono a disposizione del mercato nuovi componenti ogni giorno più evoluti
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
SOFTWARE PER LA RILEVAZIONE DEI TEMPI PER CENTRI DI COSTO
 SOFTWARE PER LA RILEVAZIONE DEI TEMPI PER CENTRI DI COSTO Descrizione Nell ambito della rilevazione dei costi, Solari con l ambiente Start propone Time&Cost, una applicazione che contribuisce a fornire
SOFTWARE PER LA RILEVAZIONE DEI TEMPI PER CENTRI DI COSTO Descrizione Nell ambito della rilevazione dei costi, Solari con l ambiente Start propone Time&Cost, una applicazione che contribuisce a fornire
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
CONTROLLO NUMERICO Z32
 CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
CONTROLLO NUMERICO Z32
 CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
SISTEMI DI AUTOMAZIONE BARCODE & RFID
 SISTEMI DI AUTOMAZIONE BARCODE & RFID Sidera Software sviluppa soluzioni per la logistica e l automazione mediante la gestione di strumenti quali PLC per la gestione di apparecchiature, macchinari e sensori
SISTEMI DI AUTOMAZIONE BARCODE & RFID Sidera Software sviluppa soluzioni per la logistica e l automazione mediante la gestione di strumenti quali PLC per la gestione di apparecchiature, macchinari e sensori
WLINK. Ecco le principali ed innovative caratteristiche di un sistema wireless WLINK:
 Doc2wlink WLINK WLINK è, fondamentalmente, un protocollo di comunicazione radio. Esso è stato sviluppato nei laboratori CSI per dare una risposta all esigenza di comunicazioni radio sicure, affidabili
Doc2wlink WLINK WLINK è, fondamentalmente, un protocollo di comunicazione radio. Esso è stato sviluppato nei laboratori CSI per dare una risposta all esigenza di comunicazioni radio sicure, affidabili
Eletec S.n.c Via G. Agnelli, 12/14 25086 Rezzato (BS) www.eletec.com
 www.eletec.com") Mercati altrimenti impossibili La flessibilità e la convenienza di LOGO! hanno consentito ad Eletec di affrontare con successo mercati altrimenti restii ad accettare soluzioni di automazione avanzate La
Mercati altrimenti impossibili La flessibilità e la convenienza di LOGO! hanno consentito ad Eletec di affrontare con successo mercati altrimenti restii ad accettare soluzioni di automazione avanzate La
Servomotore Brushless con Elettronica Integrata - Motornet DC
 Sistema www.parker-eme.com/motornet Servomotore Brushless con Elettronica Integrata - Breve Panoramica Descrizione è un servomotore brushless con elettronica integrata, alimentato in tensione continua.
Sistema www.parker-eme.com/motornet Servomotore Brushless con Elettronica Integrata - Breve Panoramica Descrizione è un servomotore brushless con elettronica integrata, alimentato in tensione continua.
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione.
 Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Specializzazione Elettronica ed Elettrotecnica Articolazione Elettrotecnica. Elettronica ed Elettrotecnica - Classe 3^
 Specializzazione Elettronica ed Elettrotecnica Articolazione Elettrotecnica Elettronica ed Elettrotecnica - Classe 3^ 1- Reti elettriche in corrente continua Grandezze elettriche fondamentali e loro legami,
Specializzazione Elettronica ed Elettrotecnica Articolazione Elettrotecnica Elettronica ed Elettrotecnica - Classe 3^ 1- Reti elettriche in corrente continua Grandezze elettriche fondamentali e loro legami,
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione
 PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
OCS Open Control System
 OCS Open Control System L OCS è una applicazione software innovativa di supervisione e controllo, progettata e realizzata da Strhold S.p.A. per consentire la gestione centralizzata di sottosistemi periferici.
OCS Open Control System L OCS è una applicazione software innovativa di supervisione e controllo, progettata e realizzata da Strhold S.p.A. per consentire la gestione centralizzata di sottosistemi periferici.
SOFTWARE PER LA RILEVAZIONE PRESENZE SUL WEB
 SOFTWARE PER LA RILEVAZIONE PRESENZE SUL WEB Descrizione Time@Web rappresenta l applicazione per la gestione delle presenze via Web. Nel contesto dell ambiente START, Solari ha destinato questa soluzione
SOFTWARE PER LA RILEVAZIONE PRESENZE SUL WEB Descrizione Time@Web rappresenta l applicazione per la gestione delle presenze via Web. Nel contesto dell ambiente START, Solari ha destinato questa soluzione
Architettura dei computer
 Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore (CPU) la memoria principale (RAM) la memoria secondaria i dispositivi di input/output Il processore
Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore (CPU) la memoria principale (RAM) la memoria secondaria i dispositivi di input/output Il processore
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
LA LOGISTICA INTEGRATA
 dell Università degli Studi di Parma LA LOGISTICA INTEGRATA Obiettivo: rispondere ad alcuni interrogativi di fondo Come si è sviluppata la logistica in questi ultimi anni? Quali ulteriori sviluppi sono
dell Università degli Studi di Parma LA LOGISTICA INTEGRATA Obiettivo: rispondere ad alcuni interrogativi di fondo Come si è sviluppata la logistica in questi ultimi anni? Quali ulteriori sviluppi sono
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
Strategie di rinnovo dei sistemi di automazione di stazione
 Strategie di rinnovo dei sistemi di automazione di stazione Massimo Petrini TERNA SpA Emiliano Casale TERNA SpA Maurizio Pareti SELTA SpA Forum Telecontrollo Reti Acqua Gas ed Elettriche Roma 14-15 ottobre
Strategie di rinnovo dei sistemi di automazione di stazione Massimo Petrini TERNA SpA Emiliano Casale TERNA SpA Maurizio Pareti SELTA SpA Forum Telecontrollo Reti Acqua Gas ed Elettriche Roma 14-15 ottobre
Più processori uguale più velocità?
 Più processori uguale più velocità? e un processore impiega per eseguire un programma un tempo T, un sistema formato da P processori dello stesso tipo esegue lo stesso programma in un tempo TP T / P? In
Più processori uguale più velocità? e un processore impiega per eseguire un programma un tempo T, un sistema formato da P processori dello stesso tipo esegue lo stesso programma in un tempo TP T / P? In
Sistemi di Elaborazione delle Informazioni. Corso di Laurea per "Tecnico Ortopedico" 03
 Sistemi di Elaborazione delle Informazioni Corso di Laurea per "Tecnico Ortopedico" a.a. 2002-03 03 Prof. Luigi Borrelli Facoltà di Medicina e Chirurgia Università degli Studi di Napoli - Federico II a.a.
Sistemi di Elaborazione delle Informazioni Corso di Laurea per "Tecnico Ortopedico" a.a. 2002-03 03 Prof. Luigi Borrelli Facoltà di Medicina e Chirurgia Università degli Studi di Napoli - Federico II a.a.
PR362009 24 novembre 2009 Software, controllo basato su PC Pagina 1 di 5
 Software, controllo basato su PC Pagina 1 di 5 Utilizzo degli standard IT: ambiente di programmazione TwinCAT integrato in Microsoft Visual Studio TwinCAT 3, dalla standard Automation all extended Automation
Software, controllo basato su PC Pagina 1 di 5 Utilizzo degli standard IT: ambiente di programmazione TwinCAT integrato in Microsoft Visual Studio TwinCAT 3, dalla standard Automation all extended Automation
ITA GEFRAN SOLUZIONI PROGETTAZIONE E REALIZZAZIONE DI APPARECCHIATURE DI AUTOMAZIONE E QUADRI ELETTRICI
 ITA GEFRAN SOLUZIONI PROGETTAZIONE E REALIZZAZIONE DI APPARECCHIATURE DI AUTOMAZIONE E QUADRI ELETTRICI 04/2015 GEFRAN SOLUZIONI Gefran Soluzioni progetta e realizza apparecchiature di automazione e quadri
ITA GEFRAN SOLUZIONI PROGETTAZIONE E REALIZZAZIONE DI APPARECCHIATURE DI AUTOMAZIONE E QUADRI ELETTRICI 04/2015 GEFRAN SOLUZIONI Gefran Soluzioni progetta e realizza apparecchiature di automazione e quadri
Base di dati e sistemi informativi
 Base di dati e sistemi informativi Una base di dati è un insieme organizzato di dati opportunamente strutturato per lo svolgimento di determinate attività La base di dati è un elemento fondamentale per
Base di dati e sistemi informativi Una base di dati è un insieme organizzato di dati opportunamente strutturato per lo svolgimento di determinate attività La base di dati è un elemento fondamentale per
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale. 1/6 www.ni.com
 RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
TERMINALE PER IL CONTROLLO ACCESSI 2745
 TERMINALE PER IL CONTROLLO ACCESSI 2745 Il controllo accessi rappresenta un metodo importante per la risoluzione dei problemi legati al controllo e alla verifica della presenza e del passaggio delle persone
TERMINALE PER IL CONTROLLO ACCESSI 2745 Il controllo accessi rappresenta un metodo importante per la risoluzione dei problemi legati al controllo e alla verifica della presenza e del passaggio delle persone
PROGRAMMAZIONE DI T.T.I.M. CLASSE V. Opzione Manutentore Impianti Elettrici e Automazione
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE ) CLASSE V Opzione Manutentore Impianti Elettrici e Automazione (8 ore/settimana programmate su 30 settimane/anno,
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE ) CLASSE V Opzione Manutentore Impianti Elettrici e Automazione (8 ore/settimana programmate su 30 settimane/anno,
Soluzioni integrate per la gestione del magazzino
 Soluzioni integrate per la gestione del magazzino whsystem Light è la versione di whsystem dedicata alla gestione di magazzini convenzionali. Questa variante prevede un modulo aggiuntivo progettato per
Soluzioni integrate per la gestione del magazzino whsystem Light è la versione di whsystem dedicata alla gestione di magazzini convenzionali. Questa variante prevede un modulo aggiuntivo progettato per
Liceo Tecnologico. Indirizzo Informatico e Comunicazione. Indicazioni nazionali per Piani di Studi Personalizzati
 Indirizzo Informatico e Comunicazione Indicazioni nazionali per Piani di Studi Personalizzati Indirizzo Informatico e Comunicazione Discipline con attività di laboratorio 3 4 5 Fisica 132 Gestione di progetto
Indirizzo Informatico e Comunicazione Indicazioni nazionali per Piani di Studi Personalizzati Indirizzo Informatico e Comunicazione Discipline con attività di laboratorio 3 4 5 Fisica 132 Gestione di progetto
Logic Lab. un progetto italiano. www.axelsw.it. soluzioni SOFTWARE PER L'AUTOMAZIONE INDUSTRIALE
 Logic Lab soluzioni SOFTWARE PER L'AUTOMAZIONE INDUSTRIALE un progetto italiano www.axelsw.it Logic Lab La garanzia e l economia degli standard più diffusi sul mercato LogicLab è un ambiente di sviluppo
Logic Lab soluzioni SOFTWARE PER L'AUTOMAZIONE INDUSTRIALE un progetto italiano www.axelsw.it Logic Lab La garanzia e l economia degli standard più diffusi sul mercato LogicLab è un ambiente di sviluppo
RETI E SISTEMI INFORMATIVI
 RETI E SISTEMI INFORMATIVI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: mercoledì, 10.00-11.00. Studio 34, primo piano. Dip. Statistica 1 Modalità esame: scritto + tesina facoltativa
RETI E SISTEMI INFORMATIVI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: mercoledì, 10.00-11.00. Studio 34, primo piano. Dip. Statistica 1 Modalità esame: scritto + tesina facoltativa
La soluzione per la gestione dei suoi utensili
 La soluzione per la gestione dei suoi utensili TDM Systems Comp TDM Systems Professionisti nella gestione degli utensili TDM Systms GmbH sviluppa e commercia, da oltre 20 anni, un software per la gestione
La soluzione per la gestione dei suoi utensili TDM Systems Comp TDM Systems Professionisti nella gestione degli utensili TDM Systms GmbH sviluppa e commercia, da oltre 20 anni, un software per la gestione
Concetti di base di ingegneria del software
 Concetti di base di ingegneria del software [Dalle dispense del corso «Ingegneria del software» del prof. A. Furfaro (UNICAL)] Principali qualità del software Correttezza Affidabilità Robustezza Efficienza
Concetti di base di ingegneria del software [Dalle dispense del corso «Ingegneria del software» del prof. A. Furfaro (UNICAL)] Principali qualità del software Correttezza Affidabilità Robustezza Efficienza
Informazioni stampa. Nuovo concetto di controllo per la lavorazione dei metalli. Beckhoff alla EMO Pad. 25, Stand G33
 EMO 2007 Pagina 1 di 5 Beckhoff alla EMO Pad. 25, Stand G33 Nuovo concetto di controllo per la lavorazione dei metalli In occasione della fiera EMO 2007, Beckhoff presenterà una nuova generazione di sistemi
EMO 2007 Pagina 1 di 5 Beckhoff alla EMO Pad. 25, Stand G33 Nuovo concetto di controllo per la lavorazione dei metalli In occasione della fiera EMO 2007, Beckhoff presenterà una nuova generazione di sistemi
Strumenti di modellazione. Gabriella Trucco
 Strumenti di modellazione Gabriella Trucco Linguaggio di modellazione Linguaggio formale che può essere utilizzato per descrivere (modellare) un sistema Il concetto trova applicazione soprattutto nell
Strumenti di modellazione Gabriella Trucco Linguaggio di modellazione Linguaggio formale che può essere utilizzato per descrivere (modellare) un sistema Il concetto trova applicazione soprattutto nell
L HARDWARE parte 1 ICTECFOP@GMAIL.COM
 L HARDWARE parte 1 COMPUTER E CORPO UMANO INPUT E OUTPUT, PERIFERICHE UNITA DI SISTEMA: ELENCO COMPONENTI COMPONENTI NEL DETTAGLIO: SCHEDA MADRE (SOCKET, SLOT) CPU MEMORIA RAM MEMORIE DI MASSA USB E FIREWIRE
L HARDWARE parte 1 COMPUTER E CORPO UMANO INPUT E OUTPUT, PERIFERICHE UNITA DI SISTEMA: ELENCO COMPONENTI COMPONENTI NEL DETTAGLIO: SCHEDA MADRE (SOCKET, SLOT) CPU MEMORIA RAM MEMORIE DI MASSA USB E FIREWIRE