Introduzione al corso
|
|
|
- Albino Massa
- 8 anni fa
- Visualizzazioni
Transcript
1 Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale) Matrice di rotazione, Composizione di matrici di rotazione, Angoli di Eulero,Trasformazioni omogenee, Cinematica diretta, Convenzione di Denavit-Hartenberg, Cinematica di strutture tipiche, Spazio dei giunti e spazio operativo, Cinematica inversa, Cenni alla cinematica differenziale (relazioni tra velocità dei giunti e velocità dell organo terminale)

2 Dinamica (equazioni del moto del manipolatore in funzione delle forze e momenti agenti su di esso) Formulazione di Lagrange, Modello dinamico di strutture tipiche Pianificazione di traiettorie Traiettorie nello spazio dei giunti, Moto punto-punto, Moto su percorso assegnato, cenni alle traiettorie nello spazio operativo Controllo del moto (determinazione delle forze/coppie agli attuatori per garantire l esecuzione delle traiettorie di riferimento) Il problema del controllo, Controllo nello spazio dei giunti, Controllo indipendente ai giunti, Compensazione in avanti a coppia precalcolata, Cenni al controllo centralizzato ed alle tecniche avanzate di controllo, cenni al controllo dell interazione) Attuatori e sensori (cenni) Unità di governo Tecniche di controllo intelligente Reti neurali, Fuzzy logic, Algoritmi di ottimizzazione
 Attuatori e sensori (cenni) Unità di governo Tecniche di controllo")
3 ROBOTICA Studio di macchine che possano sostituire l uomo nell esecuzione di un compito, sia in termini di attivita fisica che decisionale Radici culturali mitologia Automa=creatura meccanica creata per sostituire l uomo era industriale: robot (robota = lavoro esecutivo) commediografo ceco Capek, 1921
 commediografo ceco")
4 Cenni storici Anni 40 Programmi di ricerca per lo sviluppo di manipolatori meccanici con controllo a distanza per la manipolazione di materiali radioattivi :architettura master-slave, il robot riproduce i movimenti dell operatore Anni 50 Dispositivo di trasferimento articolato programmato, il robot esegue una sequenza di operazioni programmate Anni UNIMATE (Unimation Inc.) primo robot industriale, associazione tra un calcolatore ed un manipolatore, viene usato dalla General Motor come asservimento ad una macchina per la pressocolata Introduzione dei sensori
 primo robot industriale, associazione tra un calcolatore ed un manipolatore, viene usato dalla General Motor come asservimento ad una")
5 anni 70: installazione di diversi tipi di robot commerciali ad azionamento elettrico o idraulico il costo dei robot risulta concorrenziale con la manodopera da allora in poi lo sviluppo è stato rapido

6 Trend di sviluppo della robotica industriale sistemi user-friendly sviluppo del software per la programmazione on-line, il monitoraggio remoto, sviluppo di programmi da parte di non esperti maggiori funzionalità (sensori, sistemi di visione, autonomia) integrazione hw-sw mirata al processo
 integrazione hw-sw")
7 Al di fuori del contesto industriale assumono sempre maggiore rilevanza i service robot : robot che opera in maniera parziale o completamente autonoma per compiere servizi utili al benessere di uomini o attrezzature applicazioni attuali per uso professionale: robot sottomarini (27%) per demolizioni (20%) medicali (15%) per laboratori (9%) in agricoltura (6%) altri (23%) applicazioni per uso privato: pulizia pavimenti taglio erba divertimento
 in agricoltura (6%) altri (23%) applicazioni per uso privato: pulizia pavimenti taglio erba")
8 progetto in fase di sviluppo: Shear Magic (Australia) (robot per la tosatura automatica delle pecore: tosa le pecora posta su un carrello muovendone opportunamente le zampe e il muso, riconosce la forma della pecora, pianifica la traiettoria, identifica e compensa i movimenti della pecora tramite sensori a ultrasuoni, corregge il movimento per evitare i tagli tramite sensori di contatto, impiega il doppio del tempo di un uomo ma riduce le abrasioni)

9 Robotica Un ROBOT è un manipolatore multifunzionale riprogrammabile progettato per spostare materiali, parti, utensili o dispositivi specializzati, per mezzo di movimenti variabili programmati per l esecuzione di un dato numero di compiti. (Robot Institute of America, 1980) La robotica è stata recentemente definita come la scienza che studia la connessione intelligente tra percezione e azione
 La robotica è stata recentemente definita come la scienza che")
10 Capacità di agire sull ambiente: sistema meccanico (locomozione + manipolazione) (progettazione meccanica, scelta dei materiali, scelta degli attuatori) Capacità di percezione sistema sensoriale (sensori propriocettivi ed eterocettivi) (condizionamento ed elaborazione dei segnali, scelta dei sensori) Connessione tra azione e percezione sistema di governo:comanda l esecuzione dell azione nel rispetto dei vincoli imposti dal sistema meccanico e dell ambiente (ambiente di programmazione, architettura del sistema di elaborazione e controllo, politiche di controllo, intelligenza artificiale) Robotica avanzata: spiccate caratteristiche di autonomia applicazioni in ambiente ostile (spaziale, sottomarino, nucleare, militare,...) missioni di servizio (applicazioni domestiche, assistenza medica, assistenza ai disabili, agricoltura,...). Eta infantile: prototipi Robotica industriale: ambiente fortemente strutturato progettazione, governo e applicazioni dei robot in ambito industriale Tecnologia matura

11 Automazione Tecnologia il cui obiettivo è quello di sostituire la macchina all uomo in un processo di produzione, non solo per quanto riguarda l esecuzione delle operazioni materiali, ma anche per ciò che concerne l elaborazione intelligente delle informazioni sullo stato del processo. automazione rigida (produzione in serie di grossi volumi di manufatti di caratteristiche costanti) automazione programmabile (produzione di piccoli e medi lotti di manufatti di caratteristiche variabili) automazione flessibile (produzione di lotti variabili di manufatti diversi) I robot industriali sono i componenti tipici dei sistemi di automazione programmabili, possono comunque svolgere compiti sia in sistemi rigidi che flessibili
 automazione flessibile (produzione di lotti variabili di manufatti diversi) I robot industriali sono i componenti tipici dei sistemi di automazione")
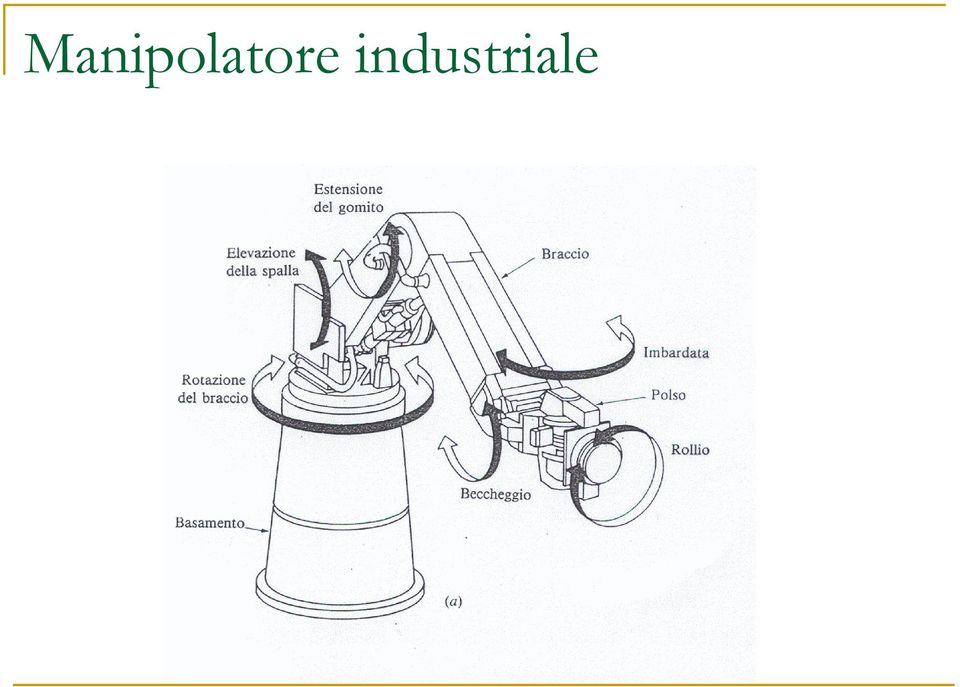
12 I robot Industriali Un robot industriale è costituito da : Una struttura meccanica, o manipolatore, che consiste in un insieme di corpi rigidi (bracci) interconnessi tra loro per mezzo di articolazioni (giunti); nel manipolatore si individuano una struttura portante, che ne assicura la mobilità, un polso, che conferisce destrezza, ed un organo terminale che esegue il compito per il quale il robot è utilizzato. Attuatori che imprimono il movimento al manipolatore attraverso l azione dei giunti; si impiegano usualmente motori elettrici, idraulici e talvolta pneumatici. Sensori che misurano lo stato del manipolatore ed eventualmente lo stato dell ambiente. Una unità di governo con funzioni di controllo e supervisione dei movimenti del manipolatore.

13 Manipolatore industriale
14 Applicazioni dei Robot Industriali Manipolazione Trasferimento di materiali Ispezione di materiali e misura

15 Applicazioni dei Robot Industriali TRASPORTO palettizzazione (disposizione di oggetti in maniera preordinata su un opportuno supporto raccoglitore) carico e scarico di magazzini carico e scarico di macchine operatrici e macchine utensili selezione e smistamento di parti confezionamento di merci

16 Applicazioni dei Robot Industriali MANIPOLAZIONE saldatura verniciatura a spruzzo fresatura e trapanatura incollaggio taglio finitura assemblaggio di gruppi meccanici ed elettrici montaggio di schede elettroniche avvitatura cablaggio

17 Applicazioni dei Robot Industriali MISURA e ISPEZIONE collaudo dimensionale rivelamento di profili individuazione di difetti di fabbricazione

18 Struttura dei manipolatori Catena cinematica aperta o chiusa una catena cinematica è detta aperta quando vi è una sola sequenza di bracci che connette i due estremi della catena. Alternativamente un manipolatore contiene una catena cinematica chiusa quando una sequenza di bracci forma un anello (garantiscono una maggiore rigidezza, hanno migliore precisione per portate più elevate).

19 Giunti di tipo prismatico o di tipo rotoidale. In una catena cinematica aperta ogni giunto, prismatico o rotoidale, conferisce un singolo grado di mobilità. Un giunto prismatico realizza un moto relativo di traslazione tra due bracci Un giunto rotoidale conferisce un moto relativo di rotazione tra due bracci. Asse (di un giunto): direzione lungo la quale o attorno la quale una parte del robot può muoversi il numero di assi corrisponde al numero di gdl

20 Gradi di mobilità I gradi di mobilità devono essere opportunamente distribuiti lungo la struttura meccanica in modo da fornire i gradi di libertà richiesti, per l'esecuzione di un dato compito. Caso generale: compito che consiste nel posizionamento e orientamento di un oggetto sono necessari sei gradi di libertà se il numero dei gradi di mobilità sono superiori ai gradi di libertà richiesti, il manipolatore si dice ridondante, in tal caso alcuni movimenti possono essere fatti con diverse combinazioni di movimenti dei singoli attuatori e si può scegliere il movimento ottimo.

21 Spazi Spazio di lavoro Parte dell ambiente a cui l organo terminale può accedere (dipende dalla struttura e dai fine corsa dei giunti) Spazio di movimento Parte dell ambiente che può essere toccato da qualsiasi parte in movimento del robot (dove c è pericolo di urto)
22 Misura degli errori di posizione precisione (o accuratezza): differenza tra la posizione desiderata (posa di comando) e la media delle posizioni raggiunte in più ripetizioni ripetitibilità: dispersione delle pose di risposta rispetto alla media
23 Classificazione dei manipolatori Geometria cartesiana Geometria cilindrica Geometria sferica Geometria SCARA Geometria antropomorfa
24 Geometria Cartesiana 3 giunti prismatici con assi ortogonali tra loro Ad ogni grado di mobilità corrisponde un grado di libertà ottime caratteristiche di rigidezza meccanica precisione di posizionamento del polso costante nello spazio di lavoro scarsa destrezza operazioni di trasporto e assemblaggio azionamenti elettrici (talvolta pneumatici)
25 Struttura cartesiana a portale: manipolazione di oggetti di dimensione e peso rilevanti
26 Struttura a portale Unità lineare Kuka KL 250 con robot KR 15/2
27 Geometria cilindrica un giunto rotoidale e due prismatici ad ogni grado di mobilità corrisponde un grado di libertà in coordinate cilindriche buone caratteristiche di rigidezza meccanica la precisione di posizionamento del polso si riduce al crescere dello sbraccio orizzontale operazioni di trasporto di oggetti anche di peso rilevante azionamenti idraulici (o elettrici)
28 Geometria sferica due giunti rotoidali e uno prismatico ad ogni grado di mobilità corrisponde un grado di libertà in coordinate sferiche discrete caratteristiche di rigidezza meccanica può manipolare oggetti sul pavimento la precisione di posizionamento del polso si riduce al crescere dello sbraccio radiale operazioni di lavorazione azionamenti elettrici
29 Geometria SCARA due giunti rotoidali e uno prismatico con assi del moto paralleli tra loro Selective Compliance Assembly Robot Arm elevata rigidezza a carichi verticali e cedevolezza a carichi orizzontali la precisione di posizionamento del polso si riduce al crescere della distanza del polso stesso dall asse del primo giunto manipolazione di piccoli oggetti, assemblaggio per inserimenti verticali azionamenti elettrici
30 Geometria SCARA Robot AdeptOne XL (SCARA a 4 giunti) Sbraccio 800mm, portata 12 Kg Velocità 1200mm/s giunto prismatico Da 600 a 3300 gradi/s per i 3 giunti rotoidali
31 Geometria Antropomorfa 3 giunti rotoidali L asse di rotazione della base è ortogonale agli altri due che sono paralleli I giunti vengono detti spalla e gomito struttura più destra precisione di posizionamento variabile applicazioni molteplici azionamenti elettrici
32 Geometria Antropomorfa
33 Geometria Antropomorfa Antropomorfo a 6 giunti Polso non sferico Sbraccio orizontale 1458 mm Sbraccio verticale 2208 mm Velocità primi 3 giunti /s Velocità ultimi 3 giunti /s Portata 16 kg Robot Comau SMART S2
34 Polso sferico La struttura del manipolatore ha il compito di posizionare il polso Il polso ha il compito di orientare l organo terminale Per garantire orientamenti arbitrari nello spazio 3D sono necessari 3 gradi di mobilità realizzati da giunti rotoidali I 3 assi di rotazione si intersecano in un punto caratteristiche di compattezza e destrezza disaccoppiamento tra posizione e orientamento Organo terminale specificato in relazione al compito che il robot deve eseguire - pinza (trasporto) - utensile o dispositivo specializzato (lavorazione e assemblaggio)
35 La scelta del tipo di robot adatto per un compito specifico dipende dai vincoli sullo spazio di lavoro richiesto, sulla destrezza, sulla precisione di posizionamento, sulle prestazioni dinamiche
36 Mercato della Robotica
37 Mercato della Robotica
38 Mercato della Robotica
39 Mercato della Robotica
40 Mercato della Robotica
41 Mercato della Robotica
42 Mercato della Robotica
43 ROBOTICA Vincoli Coppie Movimento nello spazio dei giunti Generatore di traiettorie Cinematica inversa Controllo delle traiettorie Attuatori Meccanica Ambiente Controllo del compito Compito Sensori di stato interno Sensori di stato esterno
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali
 Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Robotica industriale. Introduzione al corso. Prof. Paolo Rocco (paolo.rocco@polimi.it)
") Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
Introduzione alla Robotica
 1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
Fondamenti di robotica
 Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
modulog Combinazioni di moduli per la tecnica della manipolazione
 modulog Combinazioni di moduli per la tecnica della manipolazione Facile gestione di carichi pesanti - un valore aggiunto per la produttività La manipolazione ed il montaggio manuale di carichi pesanti
modulog Combinazioni di moduli per la tecnica della manipolazione Facile gestione di carichi pesanti - un valore aggiunto per la produttività La manipolazione ed il montaggio manuale di carichi pesanti
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
ROBOT CARTESIANI. Abbiamo 9 modelli di robot cartesiani che possono essere forniti in 3 tipologie diverse:
 ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
Componenti per la robotica: Generalità e Attuatori
 Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
PALLETTIZZAZATORI E FINE LINEA
 PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
Il controllo qualità con GOM nel settore Automotive
 Il controllo qualità con GOM nel settore Automotive La riduzione dei tempi di sviluppo prodotto e la riduzione dei costi forzano le aziende ad aumentare la loro efficienza. Parte importante di questo sforzo
Il controllo qualità con GOM nel settore Automotive La riduzione dei tempi di sviluppo prodotto e la riduzione dei costi forzano le aziende ad aumentare la loro efficienza. Parte importante di questo sforzo
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
LA PROGRAMMAZIONE N10 G0 X5 Y5
 LA PROGRAMMAZIONE Un programma per una Macchina Utensile CNC è costituito da una sequenza logica di informazioni geometriche, tecnologiche ed ausiliarie (fasi di lavoro). Le informazioni geometriche riguardano
LA PROGRAMMAZIONE Un programma per una Macchina Utensile CNC è costituito da una sequenza logica di informazioni geometriche, tecnologiche ed ausiliarie (fasi di lavoro). Le informazioni geometriche riguardano
Elevata resa e flessibilità: bordatrici BRANDT e HOMAG
 XYLEXPO Pagina: 1 / 7 Aprile 2016 Tecnologia di bordatura di HOMAG Group alla XYLEXPO 2016 Elevata resa e flessibilità: bordatrici BRANDT e HOMAG Dall artigianato fino all industria: BRANDT e HOMAG si
XYLEXPO Pagina: 1 / 7 Aprile 2016 Tecnologia di bordatura di HOMAG Group alla XYLEXPO 2016 Elevata resa e flessibilità: bordatrici BRANDT e HOMAG Dall artigianato fino all industria: BRANDT e HOMAG si
PALETTIZZAZATORI E FINE LINEA
 PALLETTIZZATORI PALETTIZZAZATORI E FINE LINEA Apiel produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche
PALLETTIZZATORI PALETTIZZAZATORI E FINE LINEA Apiel produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche
TORNI VERTICALI A DUE MONTANTI Mod. 1520, 1525, 1L532
 TORNI VERTICALI A DUE MONTANTI Mod. 15, 155, 1L5 M.I.R.M.U. Via Baldinucci, 4 158 Milano Tel.959 Fax.9954 info @mirmu.it 1 Le macchine sono destinate alle operazioni di sgrossatura e di finitura di pezzi
TORNI VERTICALI A DUE MONTANTI Mod. 15, 155, 1L5 M.I.R.M.U. Via Baldinucci, 4 158 Milano Tel.959 Fax.9954 info @mirmu.it 1 Le macchine sono destinate alle operazioni di sgrossatura e di finitura di pezzi
AUTOMAZIONE INDUSTRIALE
 AUTOMAZIONE INDUSTRIALE Lo schema seguente descrive l evoluzione dei sistemi di produzione industriale con l avvento dell automazione. Vengono presi in considerazione la lavorazione alle macchine utensili,
AUTOMAZIONE INDUSTRIALE Lo schema seguente descrive l evoluzione dei sistemi di produzione industriale con l avvento dell automazione. Vengono presi in considerazione la lavorazione alle macchine utensili,
TECNOLOGIA MECCANICA LE MACCHINE UTENSILI A CNC I Centri di Lavoro
 LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Modellistica e Controllo di Sistemi ad Eventi Discreti
 Modellistica e Controllo di Sistemi ad Eventi Discreti Cos è l Automazione Industriale? Automazione Industriale: insieme di discipline (modelli, metodi e strumenti) che permettono di analizzare e progettare
Modellistica e Controllo di Sistemi ad Eventi Discreti Cos è l Automazione Industriale? Automazione Industriale: insieme di discipline (modelli, metodi e strumenti) che permettono di analizzare e progettare
PALLETTIZZAZATORI CARTESIANI APERTI
 PALLETTIZZAZATORI CARTESIANI APERTI Il pallettizzatore cartesiano aperto è un robot cartesiano serie CC a 3/4 assi con un asse a terra che può arrivare a 10 metri di corsa, per pallettizzare fino a 7 posti
PALLETTIZZAZATORI CARTESIANI APERTI Il pallettizzatore cartesiano aperto è un robot cartesiano serie CC a 3/4 assi con un asse a terra che può arrivare a 10 metri di corsa, per pallettizzare fino a 7 posti
BNC 2. Sistema di produzione servocontrollato
 Sistema di produzione servocontrollato Ottimizzazione della produzione Trasferite la produzione in serie di componenti a nastro e a filo sul nuovo sistema di produzione servocontrollato BNC 2. La macchina
Sistema di produzione servocontrollato Ottimizzazione della produzione Trasferite la produzione in serie di componenti a nastro e a filo sul nuovo sistema di produzione servocontrollato BNC 2. La macchina
Sistem Elettrica Due Automazioni industriali
 Sistemi di collaudo Sistem Elettrica Due Automazioni industriali Un Gruppo che offre risposte mirate per tutti i vostri obiettivi di produzione automatizzata e di collaudo ESPERIENZA, RICERCA, INNOVAZIONE
Sistemi di collaudo Sistem Elettrica Due Automazioni industriali Un Gruppo che offre risposte mirate per tutti i vostri obiettivi di produzione automatizzata e di collaudo ESPERIENZA, RICERCA, INNOVAZIONE
L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO.
 L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO. DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE Confronto tra giunti GRADI DI LIBERTA DEL ROBOT Si definiscono
L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO. DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE Confronto tra giunti GRADI DI LIBERTA DEL ROBOT Si definiscono
Il magazzino automatico CARTESIO per contenitori in plastica presenta un elevata densità di stoccaggio a fronte di una contenuta occupazione
 MAGAZZINI VERTICALI Il magazzino automatico CARTESIO per contenitori in plastica presenta un elevata densità di stoccaggio a fronte di una contenuta occupazione superficiale. Il sistema è dedicato all
MAGAZZINI VERTICALI Il magazzino automatico CARTESIO per contenitori in plastica presenta un elevata densità di stoccaggio a fronte di una contenuta occupazione superficiale. Il sistema è dedicato all
TECNICHE DI SIMULAZIONE
 TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
ELEVATORI PER NASTRI
 NASTRI TRASPORTATORI ELEVATORI PER NASTRI ELEVATORE CONTINUO A RIPIANI Per le esigenze di trasporto in verticale realizziamo elevatori verticali a piano fisso. Queste apparecchiature svolgono sia la funzione
NASTRI TRASPORTATORI ELEVATORI PER NASTRI ELEVATORE CONTINUO A RIPIANI Per le esigenze di trasporto in verticale realizziamo elevatori verticali a piano fisso. Queste apparecchiature svolgono sia la funzione
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
Lezione 1 Organizzazione, organi e relazioni
 Lezione 1 Organizzazione, organi e relazioni Economia e Organizzazione Aziendale Modulo 4 - L organizzazione aziendale Unità didattica 1 Concetti base dell organizzazione Antonio Dallara Concetto di organizzazione
Lezione 1 Organizzazione, organi e relazioni Economia e Organizzazione Aziendale Modulo 4 - L organizzazione aziendale Unità didattica 1 Concetti base dell organizzazione Antonio Dallara Concetto di organizzazione
IL MONDO DEI ROBOT: I PROTAGONISTI DELL AUTOMAZIONE INDUSTRIALE
 IL MONDO DEI ROBOT: I PROTAGONISTI DELL AUTOMAZIONE INDUSTRIALE La realizzazione di sistemi di controllo automatico si può far risalire ad epoche piuttosto remote nella storia dell umanità. Le prime applicazioni
IL MONDO DEI ROBOT: I PROTAGONISTI DELL AUTOMAZIONE INDUSTRIALE La realizzazione di sistemi di controllo automatico si può far risalire ad epoche piuttosto remote nella storia dell umanità. Le prime applicazioni
MISURE DIMENSIONALI MISURE DIMENSIONALI: - Sistemi a contatto. - Sistemi senza contatto.
 MISURE DIMENSIONALI Modello: tubo cilindrico misurato con forcelle del calibro caratterizzate da superfici piane e parallele fra loro. MISURE DIMENSIONALI: D Diametro del tubo misurato con calibro. Ripetendo
MISURE DIMENSIONALI Modello: tubo cilindrico misurato con forcelle del calibro caratterizzate da superfici piane e parallele fra loro. MISURE DIMENSIONALI: D Diametro del tubo misurato con calibro. Ripetendo
Il ciclo di lavorazione
 INTRODUZIONE AI CICLI DI LAVORAZIONE Rif. Bibliografico: Giusti-Santochi TECNOLOGIA MECCANICA e studi di fabbricazione Capitolo 9 1 Il ciclo di lavorazione DEFINIZIONE: Si dice CICLO DI LAVORAZIONE tutto
INTRODUZIONE AI CICLI DI LAVORAZIONE Rif. Bibliografico: Giusti-Santochi TECNOLOGIA MECCANICA e studi di fabbricazione Capitolo 9 1 Il ciclo di lavorazione DEFINIZIONE: Si dice CICLO DI LAVORAZIONE tutto
Relazioni statistiche: regressione e correlazione
 Relazioni statistiche: regressione e correlazione È detto studio della connessione lo studio si occupa della ricerca di relazioni fra due variabili statistiche o fra una mutabile e una variabile statistica
Relazioni statistiche: regressione e correlazione È detto studio della connessione lo studio si occupa della ricerca di relazioni fra due variabili statistiche o fra una mutabile e una variabile statistica
Sistemi Informativi e Sistemi ERP
 Sistemi Informativi e Sistemi Trasformare i dati in conoscenza per supportare le decisioni CAPODAGLIO E ASSOCIATI 1 I SISTEMI INFORMATIVI LI - E IMPRESA SISTEMA DI OPERAZIONI ECONOMICHE SVOLTE DA UN DATO
Sistemi Informativi e Sistemi Trasformare i dati in conoscenza per supportare le decisioni CAPODAGLIO E ASSOCIATI 1 I SISTEMI INFORMATIVI LI - E IMPRESA SISTEMA DI OPERAZIONI ECONOMICHE SVOLTE DA UN DATO
SOLLEVARE SCARICARE TRASPORTARE MONTARE LUCIDARE RUOTARE IMPILARE CARICARE TRASFERIRE ROBOT KUKA PER KR 360 CARICHI PESANTI KR 500
 SOLLEVARE SCARICARE TRASPORTARE MONTARE LUCIDARE RUOTARE IMPILARE CARICARE TRASFERIRE ROBOT KUKA PER KR 360 CARICHI PESANTI KR 500 WORKING IDEAS CHIMICA AUTOMOTIVE DIVERTIMENTO ALIMENTAZIONE BEVANDE FONDERIA
SOLLEVARE SCARICARE TRASPORTARE MONTARE LUCIDARE RUOTARE IMPILARE CARICARE TRASFERIRE ROBOT KUKA PER KR 360 CARICHI PESANTI KR 500 WORKING IDEAS CHIMICA AUTOMOTIVE DIVERTIMENTO ALIMENTAZIONE BEVANDE FONDERIA
TRONCATRICE DOPPIA TESTA ELETTRONICA 500 TS
 TRONCATRICE DOPPIA TESTA ELETTRONICA 500 TS 500 TS - 500 CD - 500 D2K Troncatrice doppia testa elettronica Le troncatrici a doppia testa Pertici vantano caratteristiche uniche in quanto a robustezza e
TRONCATRICE DOPPIA TESTA ELETTRONICA 500 TS 500 TS - 500 CD - 500 D2K Troncatrice doppia testa elettronica Le troncatrici a doppia testa Pertici vantano caratteristiche uniche in quanto a robustezza e
Veloci, Economiche, Scalabili: Tecnologie Magnetiche per l Automazione
 TECHNICAL ARTICLE Veloci, Economiche, Scalabili: Tecnologie Magnetiche per l Automazione La famiglia degli attuatori magnetici diretti include motori lineari e voice coil e offre dei vantaggi rispetto
TECHNICAL ARTICLE Veloci, Economiche, Scalabili: Tecnologie Magnetiche per l Automazione La famiglia degli attuatori magnetici diretti include motori lineari e voice coil e offre dei vantaggi rispetto
TRONCATRICE DOPPIA TESTA ELETTRONICA 600 TSE
 TRONCATRICE DOPPIA TESTA ELETTRONICA 600 TSE 600 TSE/TSP - 550 TSE/TSP Troncatrice doppia testa elettronica Troncatrice doppia testa a 3 assi controllati per alluminio, PVC e leghe leggere, ideale per
TRONCATRICE DOPPIA TESTA ELETTRONICA 600 TSE 600 TSE/TSP - 550 TSE/TSP Troncatrice doppia testa elettronica Troncatrice doppia testa a 3 assi controllati per alluminio, PVC e leghe leggere, ideale per
La Metodologia adottata nel Corso
 La Metodologia adottata nel Corso 1 Mission Statement + Glossario + Lista Funzionalià 3 Descrizione 6 Funzionalità 2 Schema 4 Schema 5 concettuale Logico EA Relazionale Codice Transazioni In PL/SQL Schema
La Metodologia adottata nel Corso 1 Mission Statement + Glossario + Lista Funzionalià 3 Descrizione 6 Funzionalità 2 Schema 4 Schema 5 concettuale Logico EA Relazionale Codice Transazioni In PL/SQL Schema
Normativa (UNI EN ISO 8373)
") UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
 MACCHINE UTENSILI è la divisione del Gruppo Overmach che si occupa di analizzare e risolvere qualsiasi problema produttivo del Cliente in fase di pre-vendita: dalla scelta della macchina utensile più
MACCHINE UTENSILI è la divisione del Gruppo Overmach che si occupa di analizzare e risolvere qualsiasi problema produttivo del Cliente in fase di pre-vendita: dalla scelta della macchina utensile più
APPLICATION SHEET Luglio
 Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Informazioni tecniche. QWD Macchine per la fabbricazione e la manutenzione degli utensili in PCD con processo di elettroerosione a filo
 Informazioni tecniche QWD Macchine per la fabbricazione e la manutenzione degli utensili in PCD con processo di elettroerosione a filo QWD 750/760 Una concezione versatile di macchina per le più elevate
Informazioni tecniche QWD Macchine per la fabbricazione e la manutenzione degli utensili in PCD con processo di elettroerosione a filo QWD 750/760 Una concezione versatile di macchina per le più elevate
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
RAPPORTO DI PROVA Venezia,. Foglio n. 1 di 7. Protocollo: Luogo e Data della prova: Richiedente: Materiale testato:
 Foglio n. 1 di 7 Protocollo: Luogo e Data della prova: Mestre, Richiedente: Materiale testato: Prova eseguita: Conducibilità termica Riferimento Normativo: UNI EN 12667 DESCRIZIONE DEL CAMPIONE SOTTOPOSTO
Foglio n. 1 di 7 Protocollo: Luogo e Data della prova: Mestre, Richiedente: Materiale testato: Prova eseguita: Conducibilità termica Riferimento Normativo: UNI EN 12667 DESCRIZIONE DEL CAMPIONE SOTTOPOSTO
RM-NC GRM-NC. Trancia-piegatrici automatiche servo-controllate
 RM-NC GRM-NC Trancia-piegatrici automatiche servo-controllate Le trancia-piegatrici automatiche servocontrollate più veloci al mondo Aumentate l efficienza nella produzione. Grazie alle trancia-piegatrici
RM-NC GRM-NC Trancia-piegatrici automatiche servo-controllate Le trancia-piegatrici automatiche servocontrollate più veloci al mondo Aumentate l efficienza nella produzione. Grazie alle trancia-piegatrici
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como LOGICA DI CONTROLLO
 Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Sommario. Introduzione 1
 Sommario Introduzione 1 1 Il Telecontrollo 1.1 Introduzione... 4 1.2 Prestazioni di un sistema di Telecontrollo... 8 1.3 I mercati di riferimento... 10 1.3.1 Il Telecontrollo nella gestione dei processi
Sommario Introduzione 1 1 Il Telecontrollo 1.1 Introduzione... 4 1.2 Prestazioni di un sistema di Telecontrollo... 8 1.3 I mercati di riferimento... 10 1.3.1 Il Telecontrollo nella gestione dei processi
ISTITUZIONI DI ECONOMIA AZIENDALE
 ISTITUZIONI DI ECONOMIA AZIENDALE 1 a) L organizzazione: concetti generali b) La struttura organizzativa c) I principali modelli di struttura organizzativa a) La struttura plurifunzionale b) La struttura
ISTITUZIONI DI ECONOMIA AZIENDALE 1 a) L organizzazione: concetti generali b) La struttura organizzativa c) I principali modelli di struttura organizzativa a) La struttura plurifunzionale b) La struttura
PALLETTIZZAZATORI E FINE LINEA
 PALLETTIZZAZATORI E FINE LINEA Apiel produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
PALLETTIZZAZATORI E FINE LINEA Apiel produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Introduzione alle tecnologie informatiche. Strumenti mentali per il futuro
 Introduzione alle tecnologie informatiche Strumenti mentali per il futuro Panoramica Affronteremo i seguenti argomenti. I vari tipi di computer e il loro uso Il funzionamento dei computer Il futuro delle
Introduzione alle tecnologie informatiche Strumenti mentali per il futuro Panoramica Affronteremo i seguenti argomenti. I vari tipi di computer e il loro uso Il funzionamento dei computer Il futuro delle
SPIDER MIXER. e il. Caratteristica principale è la flessibilità e semplicità installazione
 SPIDER MIXER Lo Spider Mixer è una macchina in grado di lavorare in autonomia e studiata appositamente per migliorare semplificare le operazione di trasferimento del prodotto all interno della cantina.
SPIDER MIXER Lo Spider Mixer è una macchina in grado di lavorare in autonomia e studiata appositamente per migliorare semplificare le operazione di trasferimento del prodotto all interno della cantina.
Sistema di cambio dell utensile Torretta utensili 3.0
 Un eccellenza più volte dimostrata Innovative technology improved Italienisch - Italiano L ORIGINALE Made in Germany Toretta utensili 3.0 Sistema di cambio dell utensile Torretta utensili 3.0 Torretta
Un eccellenza più volte dimostrata Innovative technology improved Italienisch - Italiano L ORIGINALE Made in Germany Toretta utensili 3.0 Sistema di cambio dell utensile Torretta utensili 3.0 Torretta
3DE Modeling Professional
 3DE Modeling Professional 3DE Modeling Professional è la parte di 3DE Modeling Suite che si occupa della modellazione 3D automatica di oggetti ed edifici a partire da nuvole di punti ottenute con scanner
3DE Modeling Professional 3DE Modeling Professional è la parte di 3DE Modeling Suite che si occupa della modellazione 3D automatica di oggetti ed edifici a partire da nuvole di punti ottenute con scanner
Tecniche per l analisi della postura e del movimento
 Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
CENTRO DI TAGLIO SC 55
 CENTRO DI TAGLIO SC 55 SC 55 Centro di taglio Centro di taglio CNC a 2 assi controllati, studiato per il taglio di profili in PVC. La macchina esegue le operazioni di carico profilo dal magazzino barre,
CENTRO DI TAGLIO SC 55 SC 55 Centro di taglio Centro di taglio CNC a 2 assi controllati, studiato per il taglio di profili in PVC. La macchina esegue le operazioni di carico profilo dal magazzino barre,
Sistemi centralizzati e distribuiti
 Sistemi centralizzati e distribuiti In relazione al luogo dove è posta fisicamente la base di dati I sistemi informativi, sulla base del luogo dove il DB è realmente dislocato, si possono suddividere in:
Sistemi centralizzati e distribuiti In relazione al luogo dove è posta fisicamente la base di dati I sistemi informativi, sulla base del luogo dove il DB è realmente dislocato, si possono suddividere in:
Festo Mobile Electric Automation
 Festo Mobile Electric Automation 2 Electric Automation Panoramica Optimised Motion Series Schermo Controllo semplice di curve complesse Software Orientamento libero e flessibile Soluzioni di sicurezza
Festo Mobile Electric Automation 2 Electric Automation Panoramica Optimised Motion Series Schermo Controllo semplice di curve complesse Software Orientamento libero e flessibile Soluzioni di sicurezza
Schumacher Precision Tools GmbH
 Image-Broschure Tecnologia della Filettatura Schumacher Precision Tools GmbH Prodotti Applicazioni Servizi L impresa Utensili di precisione dal 1918 Schumacher produce utensili di alta qualità e precisione
Image-Broschure Tecnologia della Filettatura Schumacher Precision Tools GmbH Prodotti Applicazioni Servizi L impresa Utensili di precisione dal 1918 Schumacher produce utensili di alta qualità e precisione
INGRANAGGI CILINDRICI E CREMAGLIERE
 INGRANAGGI CILINDRICI E CREMAGLIERE INGRANAGGI CILINDRICI CON MOZZO LATERALE pag. 4 INGRANAGGI CILINDRICI SENZA MOZZO pag. 7 CREMAGLIERE pag. 9 INGRANAGGI CILINDRICI E CREMAGLIERE INGRANAGGI CILINDRICI
INGRANAGGI CILINDRICI E CREMAGLIERE INGRANAGGI CILINDRICI CON MOZZO LATERALE pag. 4 INGRANAGGI CILINDRICI SENZA MOZZO pag. 7 CREMAGLIERE pag. 9 INGRANAGGI CILINDRICI E CREMAGLIERE INGRANAGGI CILINDRICI
PR242012 23. aprile 2012 Motion Control Pagina 1 di 5. XTS extended Transport System: un nuovo modo di concepire il Motion Control
 Motion Control Pagina 1 di 5 XTS extended Transport System: un nuovo modo di concepire il Motion Control Il nuovo principio: motore lineare con moto circolare Il nuovo sistema di azionamento XTS (extended
Motion Control Pagina 1 di 5 XTS extended Transport System: un nuovo modo di concepire il Motion Control Il nuovo principio: motore lineare con moto circolare Il nuovo sistema di azionamento XTS (extended
Guida alla registrazione on-line di un DataLogger
 NovaProject s.r.l. Guida alla registrazione on-line di un DataLogger Revisione 3.0 3/08/2010 Partita IVA / Codice Fiscale: 03034090542 pag. 1 di 17 Contenuti Il presente documento è una guida all accesso
NovaProject s.r.l. Guida alla registrazione on-line di un DataLogger Revisione 3.0 3/08/2010 Partita IVA / Codice Fiscale: 03034090542 pag. 1 di 17 Contenuti Il presente documento è una guida all accesso
2.2.4 Distanze di sicurezza UNI EN ISO 13857:2008, UNI EN 349:1994
 2.2.4 Distanze di sicurezza UNI EN ISO 13857:2008, UNI EN 349:1994 2.2.4.1 Descrizione L uso delle distanze di sicurezza rappresenta un modo per garantire l integrità fisica dei lavoratori in presenza
2.2.4 Distanze di sicurezza UNI EN ISO 13857:2008, UNI EN 349:1994 2.2.4.1 Descrizione L uso delle distanze di sicurezza rappresenta un modo per garantire l integrità fisica dei lavoratori in presenza
Indice. pagina 2 di 10
 LEZIONE PROGETTAZIONE ORGANIZZATIVA DOTT.SSA ROSAMARIA D AMORE Indice PROGETTAZIONE ORGANIZZATIVA---------------------------------------------------------------------------------------- 3 LA STRUTTURA
LEZIONE PROGETTAZIONE ORGANIZZATIVA DOTT.SSA ROSAMARIA D AMORE Indice PROGETTAZIONE ORGANIZZATIVA---------------------------------------------------------------------------------------- 3 LA STRUTTURA
Il servizio di registrazione contabile. che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili
 Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
MODELLO PER LO SVILUPPO DEL PRODOTTO
 MODELLO PER LO SVILUPPO DEL PRODOTTO 34 Funzioni aziendali coinvolte nello sviluppo prodotto LE PRINCIPALI FUNZIONI AZIENDALI PROTAGONISTE NELLO SVIPUPPO PRODOTTI SONO: Progettazione e sviluppo prodotto
MODELLO PER LO SVILUPPO DEL PRODOTTO 34 Funzioni aziendali coinvolte nello sviluppo prodotto LE PRINCIPALI FUNZIONI AZIENDALI PROTAGONISTE NELLO SVIPUPPO PRODOTTI SONO: Progettazione e sviluppo prodotto
2 Gli elementi del sistema di Gestione dei Flussi di Utenza
 SISTEMA INFORMATIVO page 4 2 Gli elementi del sistema di Gestione dei Flussi di Utenza Il sistema è composto da vari elementi, software e hardware, quali la Gestione delle Code di attesa, la Gestione di
SISTEMA INFORMATIVO page 4 2 Gli elementi del sistema di Gestione dei Flussi di Utenza Il sistema è composto da vari elementi, software e hardware, quali la Gestione delle Code di attesa, la Gestione di
CONTROLLO DEGLI ACCESSI INTELLIGENTE PER UN FLUSSO DI PERSONE SICURO E CONFORTEVOLE. KONE Access
 CONTROLLO DEGLI ACCESSI INTELLIGENTE PER UN FLUSSO DI PERSONE SICURO E CONFORTEVOLE KONE Access 1 KONE Access per una gestione avanzata del flusso di persone KONE Access è una soluzione di controllo d
CONTROLLO DEGLI ACCESSI INTELLIGENTE PER UN FLUSSO DI PERSONE SICURO E CONFORTEVOLE KONE Access 1 KONE Access per una gestione avanzata del flusso di persone KONE Access è una soluzione di controllo d
EnerSmartSystem. Efficienza energetica negli edifici domestici
 EnerSmartSystem Efficienza energetica negli edifici domestici CLK Italia srl - WEB: www.clk-italia.it - email: info@clk-italia.it - TEL: 0571 1661103 - FAX: 0571 684849 Agenda - EnerSmartSystem - Semplicità
EnerSmartSystem Efficienza energetica negli edifici domestici CLK Italia srl - WEB: www.clk-italia.it - email: info@clk-italia.it - TEL: 0571 1661103 - FAX: 0571 684849 Agenda - EnerSmartSystem - Semplicità
Comunicazione tra Computer. Protocolli. Astrazione di Sottosistema di Comunicazione. Modello di un Sottosistema di Comunicazione
 I semestre 04/05 Comunicazione tra Computer Protocolli Prof. Vincenzo Auletta auletta@dia.unisa.it http://www.dia.unisa.it/professori/auletta/ Università degli studi di Salerno Laurea in Informatica 1
I semestre 04/05 Comunicazione tra Computer Protocolli Prof. Vincenzo Auletta auletta@dia.unisa.it http://www.dia.unisa.it/professori/auletta/ Università degli studi di Salerno Laurea in Informatica 1
OBIETTIVI FORME E STRUMENTI DI SUPPORTO ALL ELABORAZIONE INTEGRATA DEI DATI 51 3/001.0
 OBIETTIVI FORME E STRUMENTI DI SUPPORTO ALL ELABORAZIONE INTEGRATA DEI DATI 51 3/001.0 OBIETTIVI DELL INTEGRAZIONE INTEGRAZIONE: INTERAZIONE DI UOMINI, PROCESSI E TECNOLOGIE CON L OBIETTIVO DI CREARE UN
OBIETTIVI FORME E STRUMENTI DI SUPPORTO ALL ELABORAZIONE INTEGRATA DEI DATI 51 3/001.0 OBIETTIVI DELL INTEGRAZIONE INTEGRAZIONE: INTERAZIONE DI UOMINI, PROCESSI E TECNOLOGIE CON L OBIETTIVO DI CREARE UN
Edometro Automatico pneumatico Computerizzato BS 1377:5 ASTM D2435 ASTM D3877 ASTM D4546 AASHTO T216 NF P94-090-1 NF P94-091 UNE 103-405 UNE 103-602
 Edometro Automatico pneumatico Computerizzato BS 1377:5 ASTM D2435 ASTM D3877 ASTM D4546 AASHTO T216 NF P94-090-1 NF P94-091 UNE 103-405 UNE 103-602 CARATTERISTICHE PRINCIPALI Controllo della prova attraverso
Edometro Automatico pneumatico Computerizzato BS 1377:5 ASTM D2435 ASTM D3877 ASTM D4546 AASHTO T216 NF P94-090-1 NF P94-091 UNE 103-405 UNE 103-602 CARATTERISTICHE PRINCIPALI Controllo della prova attraverso
Meccanica degli Azionamenti
 Università degli Studi di Brescia Laurea in Ingegneria dell Automazione Industriale Parte I Introduzione all automazione industriale I.1 Automazione e Flessibilità Automazione Automazione: Impiego di mezzi
Università degli Studi di Brescia Laurea in Ingegneria dell Automazione Industriale Parte I Introduzione all automazione industriale I.1 Automazione e Flessibilità Automazione Automazione: Impiego di mezzi
ROBOT. 1. Premessa. asservimento alle macchine utensili (scarico dei pezzi lavorati e carico dei pezzi da lavorare);
;") ROBOT 1. Premessa Il termine Robot viene introdotto per la prima volta nel 1920 dal commediografo Karel Capek con il termine ceco "robota" (lavoratore). Isaac Asimov, scrittore di libri divulgativi e di
ROBOT 1. Premessa Il termine Robot viene introdotto per la prima volta nel 1920 dal commediografo Karel Capek con il termine ceco "robota" (lavoratore). Isaac Asimov, scrittore di libri divulgativi e di
CIM A CIM B. Computer-Integrated Manufacturing (CIM)
") Computer-Integrated Manufacturing (CIM) Il Computer Integrated Manufacturing (CIM) è un metodo di produzione nel quale l'intero processo produttivo è controllato da un computer. Tipicamente, è composto
Computer-Integrated Manufacturing (CIM) Il Computer Integrated Manufacturing (CIM) è un metodo di produzione nel quale l'intero processo produttivo è controllato da un computer. Tipicamente, è composto
20.18-ITA Assemblaggio valvole AGS a triplo servizio
 TM Le valvole a servizio triplo AGS Victaulic sono costituite da una valvola a farfalla Vic-300 AGS Serie W761 e da una valvola Vic-Check AGS serie W715 (componenti spediti singolarmente, non assiemati).
TM Le valvole a servizio triplo AGS Victaulic sono costituite da una valvola a farfalla Vic-300 AGS Serie W761 e da una valvola Vic-Check AGS serie W715 (componenti spediti singolarmente, non assiemati).
CHF 270. La nuova rettificatrice per fianchi per la produzione di lame. Comando CNC per tutte le funzioni.
 CHF 270 La nuova rettificatrice per fianchi per la produzione di lame. Comando CNC per tutte le funzioni. A controllo CNC Affilatura automatica dei fianchi del dente di lame con riporti in HM. Competenza
CHF 270 La nuova rettificatrice per fianchi per la produzione di lame. Comando CNC per tutte le funzioni. A controllo CNC Affilatura automatica dei fianchi del dente di lame con riporti in HM. Competenza
ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO
 ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO vittorio.scialla@strumentiperleaziende.com Attuatore per traiettorie non lineari dotato di
ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO vittorio.scialla@strumentiperleaziende.com Attuatore per traiettorie non lineari dotato di
Software per Helpdesk
 Software per Helpdesk Padova - maggio 2010 Antonio Dalvit - www.antoniodalvit.com Cosa è un helpdesk? Un help desk è un servizio che fornisce informazioni e assistenza ad utenti che hanno problemi nella
Software per Helpdesk Padova - maggio 2010 Antonio Dalvit - www.antoniodalvit.com Cosa è un helpdesk? Un help desk è un servizio che fornisce informazioni e assistenza ad utenti che hanno problemi nella
1 Introduzione al corso 3 1.1 Architettura del sistema di controllo... 6
 Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
PROGRAMMAZIONE della M.U. CNC
 PROGRAMMAZIONE della M.U. CNC 1 La programmazione delle M.U. CNC 1 Generalità 2 Geometrie di riferimento 3 Grammatica 4 Lessico 5 Sintassi 6 Esempi 7 Linguaggio APT 2 La programmazione delle M.U. CNC Le
PROGRAMMAZIONE della M.U. CNC 1 La programmazione delle M.U. CNC 1 Generalità 2 Geometrie di riferimento 3 Grammatica 4 Lessico 5 Sintassi 6 Esempi 7 Linguaggio APT 2 La programmazione delle M.U. CNC Le
MACCHINE E AZIONAMENTI ELETTRICI
 MACCHINE E AZIONAMENTI ELETTRICI Corso di Laurea in Ingegneria Industriale Anno Accademico 2012-2013 INTRODUZIONE Docente Francesco Benzi Università di Pavia e-mail: fbenzi@unipv.it Dispense in collaborazione
MACCHINE E AZIONAMENTI ELETTRICI Corso di Laurea in Ingegneria Industriale Anno Accademico 2012-2013 INTRODUZIONE Docente Francesco Benzi Università di Pavia e-mail: fbenzi@unipv.it Dispense in collaborazione
Silca Software GLOSSARIO. February 2013 Copyright Silca S.p.A. V.2.0
 GLOSSARIO Che cos è una SCHEDA? SCHEDA ovvero l insieme dei parametri relativi a spazi, profondità, basi del taglio, angoli, riferimenti, morsetto, fresa ( un totale di circa 250 parametri per ogni asse
GLOSSARIO Che cos è una SCHEDA? SCHEDA ovvero l insieme dei parametri relativi a spazi, profondità, basi del taglio, angoli, riferimenti, morsetto, fresa ( un totale di circa 250 parametri per ogni asse
Esse vengono definite "mezzi mobili" e possono essere raggruppate in due grandi categorie: trasportatori continui e trasportatori discontinui.
 Mezzi di handling Tra le attrezzature che operano nel magazzino sono particolarmente importanti i mezzi che seguono il materiale (per lo meno con una parte) durante i suoi movimenti. Esse vengono definite
Mezzi di handling Tra le attrezzature che operano nel magazzino sono particolarmente importanti i mezzi che seguono il materiale (per lo meno con una parte) durante i suoi movimenti. Esse vengono definite
Progetto GRIIN Gestione Remota di Illuminazione in edifici INdustriali pubblici - commerciali
 Gestione Remota di Illuminazione in edifici INdustriali pubblici - commerciali Strategie e nuovi valori dell ICT per l ecosostenibilità 12 luglio 2012 Centro Congressi Torino Incontra PROGETTO GRIIN Oggetto
Gestione Remota di Illuminazione in edifici INdustriali pubblici - commerciali Strategie e nuovi valori dell ICT per l ecosostenibilità 12 luglio 2012 Centro Congressi Torino Incontra PROGETTO GRIIN Oggetto
CABINE ELETTRICHE DI TRASFORMAZIONE
 Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Programmazione Fondi Strutturali 2007/2013 P.O.N. FSE A.S. 2013/2014 SCHEDA PROGETTUALE MODULO MECCANICA, MECCATRONICA, ENERGIA
 ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
Introduzionee principali classificazioni
 Introduzionee principali classificazioni Roberto Pinto Dipartimento di Ingegneria Gestionale, dell Informazione e della Produzione (DIGIP) Università di Bergamo Di cosa parliamo in questo corso? Il termine
Introduzionee principali classificazioni Roberto Pinto Dipartimento di Ingegneria Gestionale, dell Informazione e della Produzione (DIGIP) Università di Bergamo Di cosa parliamo in questo corso? Il termine