Il controllo di processo
|
|
|
- Anna Maria Leoni
- 8 anni fa
- Visualizzazioni
Transcript
1 CORSO PLC

2 Automazione Complesso di tecniche dirette ad azionare macchine con altre macchine Dalla Meccanizzazione ossia dall impiego di macchine azionate dall uomo, si passa all azionamento automatico delle macchine, senza l intervento dell uomo L Automazione si occupa di tutti i problemi inerenti il controllo attivo di un processo Per processo s intende l evoluzione nel tempo di un sistema fisico

3 Il controllo di processo Essendo lo scopo principale di un processo l ottenimento di un prodotto avente determinate caratteristiche, chi lo progetta e chi lo gestisce deve fare in modo che esso possa essere opportunamente controllato. Possiamo allora definire «CONTROLLO DI PROCESSO» l interazione di un insieme di mezzi avente lo scopo di far evolvere il processo come previsto in base alle specifiche del prodotto da ottenere. Tale controllo può essere effettuato secondo diversi livelli gerarchici quali: singola macchina, insieme di macchine, reparto di produzione, insieme di reparti. Sia il processo che il controllo di processo possono essere effettuati in due modi profondamente diversi: Manuale Automatico Soprattutto in questi ultimi anni le industrie hanno privilegiato il ricorso a processi automatici nei quali un numero sempre maggiore di operazioni viene effettuato da macchine che sostituiscono il lavoro umano. PER «AUTOMAZIONE» SI DEVE PERTANTO INTENDERE L INTERAZIONE DI UN INSIEME DI MEZZI CHE CONSENTE DI EVITARE ATTIVITÀ MANUALI SIA PER QUANTO RIGUARDA LE SINGOLE FASI CHE PER QUANTO RIGUARDA IL CONTROLLO DEI PROCESSI.

4 Comando automatico L automazione di processo viene realizzata con un insieme di apparecchiature cui si dà il nome di «sistema di comando» o «comando automatico». Nella prima fase si ha un prelievo di informazioni sull andamento del processo, grazie ad opportuni dispositivi genericamente indicati con il nome di «sensori». La fase successiva è quella che avviene nel cervello del sistema di comando e consiste nell elaborazione delle informazioni ricevute (calcoli matematici, calcoli logici, decisione delle azioni da comandare). La terza fase consiste nell invio dei risultati dell elaborazione agli organi attuatori i quali eseguono, a conclusione del ciclo, le istruzioni ricevute.
.")
5 Elementi del sistema di controllo di un processo sensori PROCESSO attuatori sensori Segnali in ingresso programma Segnali in uscita attuatori Adattamento del segnale processore Adattamento del segnale Collegamento ad altri processori Reti locali

6 Comando Il comando è ciò che avviene in un sistema nel quale una o più grandezze di ingresso influenzano altre grandezze d uscita in base alle leggi fisiche intrinseche del sistema considerato La caratteristica del comando è il fatto che lo svolgimento dell azione, cioè la catena di comando è aperta

7 Comando manuale di una portata La quantità di una determinata sostanza che nell unità di tempo fluisce attraverso una tubazione (portata) può essere variata mediante una valvola (elemento posizionatore) e rilevata con uno strumento di misura Per una data posizione della valvola la portata può comunque variare a causa di disturbi (variazioni di pressione, prelevamenti irregolari) senza che ciò venga rilevato
 senza che ciò venga")
8 Sistema di comando per il controllo della portata ad anello aperto Se il valore effettivo (portata istantanea) ed il valore desiderato (valore di riferimento) sono diversi l uno dall altro, il sistema non può correggersi automaticamente. Una correzione può avvenire solo tramite intervento dall esterno, mediante riposizionamento della valvola. Per questo motivo si parla di un circuito ad anello aperto, come rappresentato in figura.

9 Regolazione La regolazione è un processo durante il quale la grandezza da controllare viene costantemente rilevata, confrontata con un altra grandezza, quella di riferimento, e, in base all esito di questo confronto, modificata fino a raggiungere il valore della grandezza di riferimento. Lo svolgimento delle azioni che ne derivano viene effettuato in un circuito chiuso chiamato anello di regolazione.

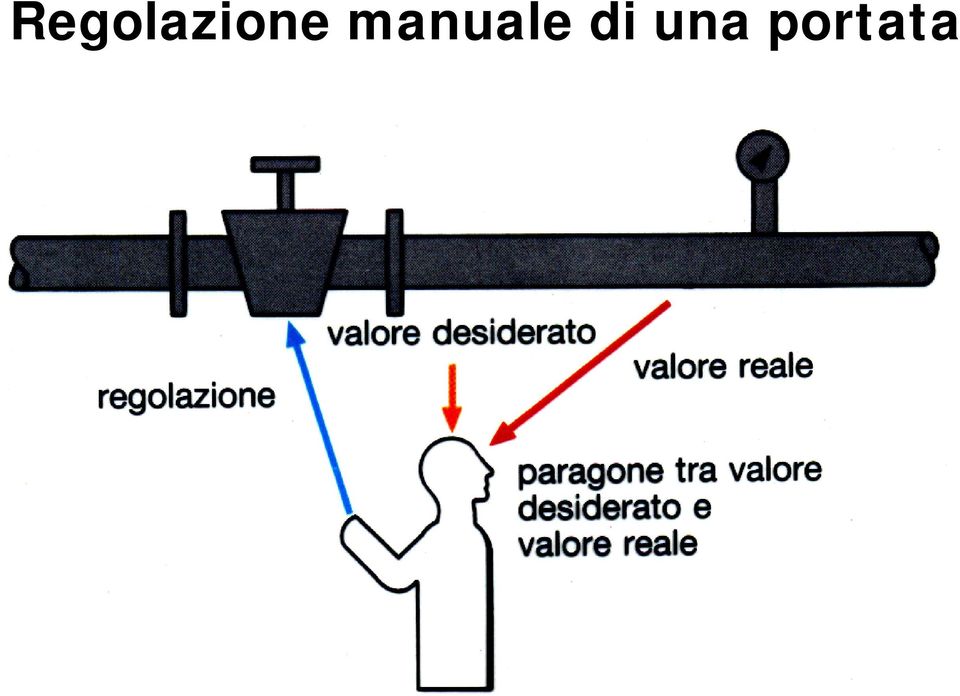
10 Regolazione manuale di una portata Se a causa di disturbi si producono indesiderate variazioni del valore registrato in uscita, questo valore effettivo deve essere regolato, ed i disturbi devono, se necessario, essere eliminati mediante compensazione della valvola. In caso di differenza tra valore effettivo e valore desiderato diventa indispensabile una regolazione correttiva. In questo modo si ottiene la regolazione del processo dove l anello di regolazione risulta essere chiuso. Se le attività di misurazione, confronto e compensazione vengono svolte dall uomo, si tratta di una regolazione manuale. Se invece vengono svolte da un dispositivo, si parla di regolazione automatica.

11 Regolazione manuale di una portata
12 Sistema di regolazione per il controllo ad anello chiuso della portata

13 Avvio dell automazione La procedura tipica di automazione richiedeva: La costruzione di un pannello II cablaggio dei componenti elettromeccanici e dei moduli elettronici scelti La verifica del funzionamento. Non essendo generalmente disponibili delle strutture di simulazione, il controllo del funzionamento doveva basarsi sull'effettiva situazione impiantistica, collegando fisicamente il controllore al sistema da governare. Se l'architettura di controllo si rivelava inefficace, spesso occorreva modificare l'intero schema di cablaggio, riassemblando i componenti utilizzati e collaudare nuovamente il tutto. Se dopo un certo tempo il ciclo di funzionamento dell'impianto doveva subire dei cambiamenti (per motivi di produzione) era necessario effettuare delle modifiche al quadro comando, non sempre facili e veloci o addirittura rifare completamente il quadro stesso con un costo non indifferente: In pratica, per ogni macchina o per ogni tipo di lavorazione, occorreva un quadro costruito su misura. Si parla di circuiti a Logica Cablata

14 Circuiti a logica cablata I circuiti a logica cablata sono quindi: Rigidi (cioè non possono essere facilmente modificati) Scarsamente riutilizzabili. La caratteristica saliente di un sistema a logica cablata è data dall'elaborazione parallela dei segnali: il verificarsi di una qualsiasi condizione di ingresso determina l'immediata modifica della corrispondente configurazione dei segnali di uscita.

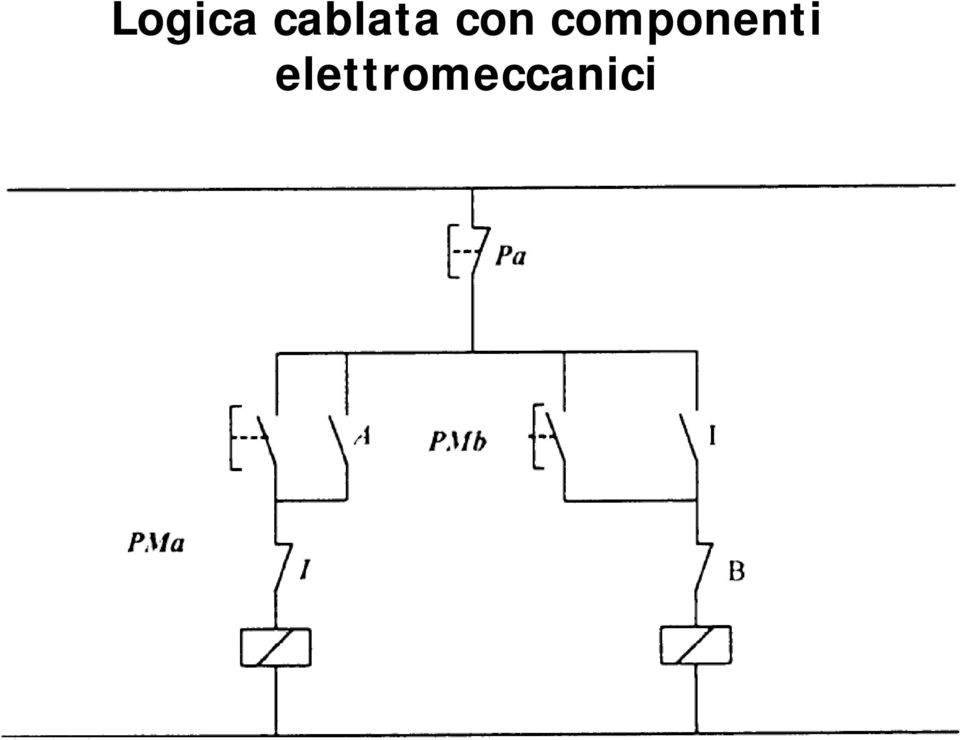
15 LOGICA CABLATA Un circuito che svolge determinate sequenze viene detto LOGICO. Un circuito logico non è altro che un insieme di elementi che svolgono una determinata funzione. In un circuito a LOGICA CABLATA i vari componenti vengono collegati tra loro seguendo uno schema ben preciso. I componenti di un sistema a logica cablata possono essere di varia natura, in base alla tecnologia adottata per il comando di quel dato sistema o impianto, possono essere componenti pneumatici oppure elettromeccanici, oppure ancora componenti elettronici (come circuiti integrati).

16 Logica cablata con componenti elettromeccanici
17 Verso il PLC In una visione moderna del mondo del controllo, l'elettronica rappresenta il cammino verso la futura automazione. La fabbrica del futuro è oggi possibile, essa può dare: Una maggiore affidabilità del sistema; Una maggiore qualità del prodotto; Un maggior flusso di informazioni; Un costo più ridotto; Un maggior grado di efficienza e flessibilità. Uno degli elementi fondamentali di una fabbrica così concepita è un'apparecchiatura elettronica chiamata: Controllore a Logica Programmabile PLC

18 L introduzione del PLC Questa apparecchiatura fu introdotta sul mercato per la prima volta nel 1970 ed è stata da allora perfezionata grazie alla disponibilità di componenti elettronici sempre più sofisticati, come il microprocessore. I PLC oggi vengono progettati utilizzando le tecniche più evolute (basate sui microprocessori e sui circuiti elettronici integrati) e consentono un funzionamento molto affidabile in applicazioni industriali, dove esistono parecchi fattori di rischio come disturbi elettrici, alte temperature, alimentazioni AC poco affidabili, vibrazioni meccaniche. Il PLC può essere definito come un sistema digitale elettronico destinato ad operare in ambiente industriale, che utilizza una memoria programmabile per memorizzare informazioni e istruzioni atte a implementare specifiche funzioni, come logica combinatoria, controlli sequenziali, temporizzazioni, conteggi, calcoli aritmetici, con riferimento al controllo di macchine e processi.

19 Dalla logica cablata alla logica programmata

20 LOGICA PROGRAMMATA In un circuito a logica programmata le varie funzioni (relè porte logiche, flip-flop, temporizzatori, contatori, ecc.) vengono ottenute mediante opportuni circuiti elettronici integrati, attivati con determinate istruzioni scritte e conservate nella memoria del sistema. Con l'introduzione del controllore logico programmabile per gestire automaticamente impianti o macchine occorre stabilire la sequenza e le condizioni di attivazione delle varie funzioni; scrivere nella memoria le istruzioni atte ad attivare le funzioni richieste al verificarsi delle condizioni stabilite (programma). Risulta pertanto evidente che, un intero ciclo produttivo o un controllo di processo può essere modificato a piacere anche in fase operativa semplicemente modificando il contenuto della memoria (cioè il programma). Inoltre non esiste più un vero e proprio cablaggio in quanto le varie funzioni vengono eseguite tramite circuiti elettronici, interni al PLC, opportunamente predisposti.
.")
21 I collegamenti al PLC Agli ingressi del PLC occorre però sempre collegare i pulsanti, gli impostatori, i finecorsa e i rilevatori di vario tipo per segnalare: in quale stato deve essere portato l'impianto (pulsanti, impostatori); in quale stato si trova istante per istante l'impianto (fine corsa, rivelatori). Alle uscite del PLC vanno invece collegati: i contattori per il comando di motori elettrici; I circuiti di comando degli attuatori (es. le elettrovalvole per il comando dei cilindri); i dispositivi di segnalazione; dispositivi vari per il comando degli attuatori. Le istruzioni eseguibili da un PLC dipendono dall intelligenza della sua unità centrale o CPU. Nei casi più semplici un PLC può limitarsi a eseguire tutte le funzioni di tipo logico altrimenti realizzabili tramite un sistema cablato a relè, oppure un sistema di moduli elettronici tra loro collegati in modo da dare funzioni fisse e definite.
22 Schema funzionale del PLC Controllo di Processo Console - Pulsanti - Interruttori - Impostatori Numerici Trasduttori - Int. Prossimità - Fine Corsa - Sensori Tempe. - Sensori Press. Ingressi PLC HARDWARE SOFTWARE Uscite Segnalazioni - Lampade -Allarmi - Display Attuatori - Teleruttori - Elettromagneti -Elettrovalvole - Riscaldatori PROCESSO DA CONTROLLARE
23 Classificazione dei PLC (I/O) Con riferimento alla quantità di ingressi ed uscite che gestisce, un PLC si dice: di gamma (o taglia) bassa quando può controllare un numero massimo di 64 I/O di gamma media quando controlla un numero di I/O compreso tra 64 e 512 di gamma alta quando controlla più di 512 I/O (normalmente 1024 o 2048)
24 Classificazione dei PLC (architetturale) In base al criterio costruttivo adottato i PLC possono essere: monoblocco (o compatti) Modulari Dal punto di vista dell impiego i PLC si possono classificare in: Sequenziali multifunzione
25 PLC Monoblocco Si dicono monoblocco (o compatti) quando vengono offerti in una configurazione rigida che non può essere modificata (Siemens Simatic S5 modello 101U: PLC monoblocco) In taluni casi il numero degli I/O può essere aumentato con il collegamento ad una unità d espansione, anch essa di tipo rigido e generalmente uguale, sia nella forma che nelle prestazioni, all unità base. I PLC compatti sono generalmente di gamma bassa.
26 PLC Modulare Un PLC si dice modulare quando è configurabile dall utente, a secondo delle specifiche esigenze assemblando in un rack, o su una base, varie schede di concezione modulare aventi ciascuna una determinata funzione. (Siemens Simatic S5 modello 105R PLC modulare con alimentatore montato e con 9 slot liberi di cui uno per CPU e 8 per schede I/O)
27 Classificazione dei PLC (Funzionale) Dal punto di vista dell impiego i PLC si possono classificare in: Sequenziali Multifunzione
28 PLC Sequenziali I PLC sequenziali possono essere compatti o modulari, di taglia piccola o media. Sono impiegati nella realizzazione degli automatismi che funzionano secondo una logica sequenziale; in pratica questi sono i controllori della prima generazione ovvero quelli nati per sostituire i quadri elettromeccanici. Gli attuali PLC sequenziali sono migliorati molto e svolgono, oltre a quelle logiche, anche altre funzioni come ad esempio: calcoli matematici elaborazione di segnali analogici oltre che On-Off conteggio veloce
29 PLC Multifunzione I PLC multifunzione sono impiegati in tutti quei casi in cui, oltre alle funzioni caratteristiche della logica sequenziale, sono richieste alcune delle seguenti prestazioni: misura regolazione (PID) posizionamento, controllo assi dialogo tra PLC e periferiche comunicazione tra PLC
30 Schema generale di un sistema PLC CPU Memoria di Programma (RAM) Timer Counter Merker UNITÀ DI GOVERNO Memoria Immagine degli Ingressi Ingressi Digitali ed Analogici BUS Periferico Unità Funzionali UNITÀ PERIFERICHE Modulo di Memoria (EPROM ) (EEPROM) Interfaccia Seriale Memoria Immagine delle Uscite Uscite Digitali ed Analogiche
31 Hardware di un PLC Memoria: Supporto fisico dove sono registrate le istruzioni che costituiscono il Programma applicativo e i dati necessari per le funzioni ausiliarie CPU: Legge lo stato dei segnali di ingresso ed esegue le istruzioni (in sequenza) registrate in memoria. In base all elaborazione provvede ad aggiornare lo stato delle uscite. Ingressi: Riceve i segnali (Fine corsa, Pulsanti, etc.) Uscite: Riceve i segnali prodotti dall elaborazione e li adatta per comandare i vari organi attuatori (Elettrovalvole, Teleruttori, spie luminose, etc.) Bus: Via di comunicazione e transito tra i vari blocchi MEMORIA BUS CPU INGRESSI (INPUT) USCITE (OUTPUT) IMPIANTO
32 Unità Centrale L Unità Centrale di un PLC risulta costituita dalle seguenti parti fondamentali: scheda processore (CPU) memorie alimentatore
33 Scheda Processore (CPU) La scheda processore, denominata anche CPU (Central Processor Unit) o ALU (Arithmetic-Logic-Unit) è la parte più importante del PLC poiché, servendosi di un microprocessore, consente l organizzazione e il coordinamento di tutte le attività del comando. La CPU legge i segnali d ingresso che recano le informazioni provenienti dal campo e che sono rilevate per mezzo di pulsanti, finecorsa, sensori e trasduttori vari. Qualora ci siano delle variazioni in tali segnali, la CPU reagisce, elabora tali nuovi dati secondo la logica interna programmata dall utente e genera gli opportuni segnali d uscita. Questi ultimi pilotano i dispositivi di campo che comandano gli attuatori permettendo l effettuazione dei movimenti secondo la sequenza desiderata.
34 Funzionamento della CPU La CPU esegue le varie istruzioni del programma in memoria: sequenzialmente (cioè una alla volta e una dopo l altra); in modo ciclico (cioè terminata l ultima istruzione riparte dalla prima) A causa di questo tipo di funzionamento è praticamente impossibile una rilevazione contemporanea di tutti i segnali di ingresso. Tra l elaborazione di una riga di programma e la successiva intercorre necessariamente un tempo, che, pur breve, è sensibile e comunque diverso da zero. Questa caratteristica è alla base dei metodi di acquisizione dello stato degli ingressi da parte dei PLC. Alcuni realizzano quella che viene definita un immagine degli ingressi all inizio della elaborazione. Tale immagine è conservata inalterata per tutto un ciclo di elaborazione, come se effettivamente gli ingressi non cambiassero, a differenza della realtà fisica, introducendo un errore noto e di solito non problematico. In altri casi i PLC aggiornano periodicamente l immagine nel corso dell elaborazione
35 24 V Funzionamento della CPU CPU STATO DEGLI INGRESSI Istruzione 1 Istruzione 2 Istruzione 3 Istruzione 4 Istruzione n Ultima Istruzione STATO DELLE USCITE La CPU legge lo stato dei segnali di Ingresso provenienti dalla Macchina o dall Impianto da controllare, esegue in sequenza le istruzioni registrate in memorie e, in base ai risultati logici dell elaborazione, provvede ad aggiornare lo stato delle Uscite del Sistema. 0 V
36 Scansione La CPU svolge le proprie mansioni secondo un ordine sequenziale, a cui si dà il nome di Scansione, che può essere schematizzato come in figura Acquisizione dagli ingressi Esecuzione del Programma Generazione uscite Acquisizione delle informazioni dal campo attraverso la lettura degli ingressi Elaborazione delle informazioni secondo il programma contenuto nella memoria Elaborazione delle informazioni al campo attraverso l aggiornamento delle uscite
37 Tipi di Scansione Ciascun PLC è costruito per operare secondo uno dei seguenti tipi di scansione: sincrona d ingresso e di uscita sincrona d ingresso e asincrona d uscita asincrona d ingresso e d uscita
38 Sincrona d Ingresso e d Uscita Essa deve il suo nome al fatto che sia la lettura che l invio dei dati avvengono in sincronismo, ovvero contemporaneamente per tutti gli ingressi e per tutte le uscite. Il PLC legge tutti gli ingressi all inizio del ciclo e crea in memoria un immagine del processo in quel momento. Tale immagine resta invariata per tutto il suo ciclo, anche se durante lo stesso alcuni ingressi potrebbero essere modificati. Vengono poi eseguite tutte le elaborazioni previste dal programma e alla fine del ciclo sono attivate o aggiornate le uscite, per poi dar seguito, all inizio del ciclo successivo, a una nuova lettura degli ingressi. Acquisizione contemporanea degli ingressi Elaborazione sequenziale delle informazioni con memorizzazione dei risultati intermedi Aggiornamento contemporaneo delle uscite
39 Scansione Sincrona d Ingresso e Asincrona d Uscita Questo tipo di ciclo si dice sincrono d ingresso, perché tutti gli ingressi vengono letti contemporaneamente, ed asincrono d uscita perché l invio alle uscite viene fatto in tempi diversi. Gli ingressi vengono letti una sola volta all inizio dell elaborazione ma le uscite vengono attivate di volta in volta quando viene risolta la funzione logica corrispondente. In questo caso l aggiornamento è più rapido, ma si verificano problemi nel caso di un uscita che ridiventa ingresso condizionando a sua volta un ulteriore uscita. In questo tipo di ciclo, l uscita che ridiventa ingresso non ha modo di agire se non con il ciclo successivo. Acquisizione contemporanea degli ingressi Elaborazione sequenziale con emissione primo risultato Aggiornamento uscita corrispondente Elaborazione sequenziale con emissione secondo risultato Aggiornamento uscita corrispondente Elaborazione sequenziale con emissione ultimo risultato Aggiornamento uscita corrispondente
40 Scansione Asincrona d Ingresso e d Uscita La scansione si dice asincrona d ingresso e d uscita poiché sia la lettura che l invio sono effettuati in tempi diversi. Legge ingressi Elaborazione sequenziale con emissione primo risultato Acquisizione ingressi e aggiornamento uscite In questo caso sia le uscite che gli ingressi vengono aggiornati ogni volta che si ottiene un risultato durante l esecuzione del programma. Elaborazione sequenziale con emissione secondo risultato Acquisizione ingressi e aggiornamento uscite Elaborazione sequenziale con emissione ultimo risultato Acquisizione ingressi e aggiornamento uscite
41 Sistema Operativo Tra le principali operazioni che tale sistema operativo gestisce ricordiamo: Scansione (già esaminata) autodiagnosi protezione dei dati funzione d Interruzione (Interrupt)
42 Autodiagnosi Alla fine di ogni scansione, immediatamente prima di ricominciare quella successiva, la CPU effettua un test autodiagnostico, ovvero un controllo sul funzionamento dei suoi circuiti interni. Se viene riscontrata qualche anomalia il sistema emette un segnale di allarme, per avvertire gli operatori che qualche cosa non funziona nella CPU e contemporaneamente vengono disabilitate le uscite, per evitare eventuali danni alle persone o alle apparecchiature. Il tipo ed il numero dei controlli dipendono dal particolare modello tuttavia quasi tutti rilevano: malfunzionamento del microprocessore malfunzionamento della memoria malfunzionamento delle schede I/O errori nella sintassi del programma utente tempo di scansione anomalo livello insufficiente della tensione fornita dalla batteria tampone
43 Protezione Dati In caso di improvvisa mancanza d alimentazione elettrica il sistema operativo provvede, automaticamente, a far alimentare le memorie, da una batteria tampone; ciò è indispensabile per evitare la perdita dei dati con conseguenze facilmente immaginabili. Per disporre di questa protezione occorre necessariamente mantenere la batteria ausiliaria in condizioni di perfetta efficienza; è questo il motivo per cui la verifica di tali prestazioni è inserita nel test di autodiagnosi. Naturalmente le condizioni di avaria sono segnalate all esterno attraverso una spia luminosa.
44 La Funzione d Interrupt L elaborazione del «programma principale» viene immediatamente interrotta in seguito all eventuale commutazione degli ingressi veloci per provocare l esecuzione del cosiddetto «sottoprogramma»; ciò consente una più immediata reazione del microprocessore alle variazioni di quei segnali che vengono indicati come prioritari Ad intervento effettuato la scansione del programma principale riprende dal punto in cui era stata interrotta. Istruzione Interrupt 1 (da dispositivo di ingresso) Subprogram Sottoprogramma Servizio interrupt 1 Interrupt 2 Subprogram Sottoprogramma Servizio interrupt 2
45 BIT Il bit è il valore logico di una variabile che può assumere solamente due stati: vero o falso (presente o assente), normalmente identificati mediante le prime due cifre decimali: 0 per essere falso (assente - non verificarsi di un evento) 1 per essere vero (presente - verificarsi di un evento) Il bit può essere assegnato a una variabile di uscita o ad una variabile di ingresso o, ancora, ad una variabile interna e ne rappresenta il comportamento logico Un insieme di bit è detto Word (o parola) Si hanno parole di 8, 16, 32 bit Una parola costituita da 8 bit viene denominata byte L unità di misura della quantità di memoria è la parola che viene però espressa con il multiplo K (kilo) e pertanto si ha: 1 K byte = 1024 byte, dove 1024 nel sistema binario è la potenza di due più prossima al valore 1000: 2 10 = 1024
46 Memorie I dispositivi che consentono registrare informazioni sono le memorie, sulle quali si possono scrivere e leggere dati Le memorie si classificano sulla base dei seguenti parametri principali: possibilità di lettura e/o scrittura velocità di scrittura modalità di cancellazione comportamento in mancanza di alimentazione elettrica (volatilità) quantità di informazioni memorizzabili (capacità) L unità utilizzata dai costruttori di PLC, per definire la quantità di memoria di cui dispone il controllore è la KWord (chiloparola) abbinata alla lunghezza di word, che può essere di 4, 8, 16 o 32 bit
47 Esempio di Memorie Dire che la memoria RAM di un PLC è di 3,5 Kword di 16 bit significa che essa è costituita da: 3,5 x 1024 = 3584 parole di 16 bit 3584 x 16 = bit : 8 = 7168 byte = 7 Kbyte oppure anche 3,5 Kw x 2 = 7 Kb essendo 1 word = 2 byte
48 Tipi di Memorie Le memorie presenti nel PLC sono di tipo: ROM RAM EPROM EEPROM
49 Memoria ROM È una memoria di sola lettura (Read Onlv Memory) è scritta dal costruttore per compiti specifici e mantiene il proprio contenuto anche in assenza di alimentazione elettrica ( memoria non volatile) La memoria ROM è utilizzata per la gestione del PLC (memoria del sistema) perché non può essere cancellata dall utente
50 Memoria RAM È una memoria ad accesso diretto (Random Access Memory), è scritta e letta dalla CPU ed è volatile, ma il suo contenuto può essere mantenuto attraverso una batteria tampone.
51 Memoria EPROM È una memoria di sola lettura, cancellabile e riprogrammabile (Erasable Programmable Read Only Memory ) Non volatile, può essere letta dal processore e può essere scritta e cancellata dall utente con l impiego di dispositivi specifici (programmatore Eprom per la scrittura e raggi ultravioletti per la cancellazione)
52 Memorie del PLC Le memorie del PLC si possono distinguere, in base al loro impiego, in: memoria di sistema memoria di programma memoria dati
53 Memoria di Sistema La memoria di sistema serve a conservare tutte quelle particolari istruzioni necessarie per la gestione ed il controllo del funzionamento della CPU e che pertanto costituiscono il vero e proprio «sistema operativo» del PLC. La memoria di sistema, dato il contenuto, di primaria importanza per il controllore, viene realizzata dal costruttore mediante ROM, allo scopo di impedire la sua involontaria cancellazione
54 Memoria di Programma In questa memoria vengono registrate le istruzioni del programma che il PLC deve eseguire. Per svolgere tale funzione essa deve essere accessibile all utente e pertanto viene realizzata con RAM o con EPROM. Normalmente il controllore offre la possibilità, attraverso la commutazione di un selettore, di usare, in alternativa tra loro, una RAM o una EPROM per sfruttare le caratteristiche positive di entrambe. Per sviluppare e mettere a punto il programma si utilizza la memoria RAM, che può essere scritta e corretta, restando installata nel PLC, con l unità di programmazione del controllore. Nel funzionamento normale conviene sfruttare le caratteristiche delle EPROM che offrono i notevoli vantaggi di non poter essere accidentalmente modificate, di non aver bisogno di batteria tampone in caso di mancanza di alimentazione elettrica e di poter essere duplicate. Quest ultima caratteristica si dimostra utile per l archiviazione dei programmi e per il trasporto degli stessi da un PLC ad un altro.
55 Memoria Dati La memoria dati è suddivida in due parti: memoria d ingresso memoria d uscita Nella prima viene memorizzato lo stato, continuamente aggiornato, dei sensori di campo collegati al controllore. Nella seconda il processore scrive, ad ogni scansione, lo stato delle uscite che deve essere trasmesso all esterno. Sono necessariamente realizzate con memorie RAM; nel funzionamento normale sono accessibili solo al processore ma per favorire la fase di messa a punto è possibile attivare una modalità di lavoro che consente l accesso alla memoria dati anche all utente che può, simulando lo stato, o come si dice in gergo «forzando gli I/O», verificare la rispondenza del programma alle specifiche.
56 Alimentatore Il microprocessore necessita di alimentazione ad una tensione continua e stabilizzata di pochi Volt (in genere 5 V), mentre per i circuiti di ingresso uscita è necessaria una tensione di 12 o 24 Volt sempre in corrente continua. Queste tensioni si ottengono con un alimentatore di adeguate caratteristiche.
57 Sistema BUS L interconnessione tra le varie parti del PLC avviene tramite un SISTEMA BUS, cioè un sistema di collegamenti interni per la trasmissione e lo scambio di segnali, tensione di alimentazione e potenziale di massa Il sistema BUS è suddiviso in più gruppi di segnali: bus degli indirizzi, tramite il quale il processore specifica l indirizzo della cella di memoria o del dispositivo di I/O a cui vuole accedere bus dati, tramite il quale è possibile lo scambio di dati tra il processore, le memorie e i moduli di I/O bus di alimentazione, tramite il quale l alimentatore fornisce le tensioni di alimentazione ai vari elementi del PLC
58 Selettore della Modalità Operativa Tutti i PLC possono usarsi almeno in due diverse modalità operative, il modo esecuzione ed il modo apprendimento o programmazione. Per selezionare le modalità di funzionamento è disponibile esternamente un selettore. Quando esso è in posizione di programmazione le uscite sono disabilitate e pertanto possono essere introdotti o editati programmi. In modo esecuzione le uscite vengono abilitate e quindi il programma contenuto in memoria è operante.
59 Connettore per Unità di Programmazione Per inserire i programmi nella memoria del controllore occorre collegare ad esso una delle unità di programmazione previste dal costruttore. E necessario quindi un opportuno dispositivo di comunicazione tra la memoria di programma ed il dispositivo programmatore.
60 Selettore RAM/EPROM Abbiamo già detto della possibilità di funzionamento sia con RAM che con EPROM; per rendere possibile questa prestazione il PLC deve essere dotato di uno zoccolo porta-memoria estraibile, per l interscambio RAM/EPROM e viceversa, oppure di uno zoccolo porta EPROM supplementare e di un selettore che avvisa il processore circa il tipo di memoria che deve leggere.
61 Relè di RUN o Inibitore delle Uscite Si tratta di un dispositivo di sicurezza che in modo esecuzione è attivato e pertanto abilita le uscite. Quando si verifica una qualche irregolarità rilevata dall autodiagnosi o viene a mancare tensione, il relè si disattiva automaticamente interrompendo il programma e disabilitando le uscite. Tale dispositivo è fornito di due contatti esterni utilizzabili per realizzare un allarme per gli operatori in caso di guasto.
62 Circuiti di Autodiagnosi Il controllore esegue ad ogni ciclo un test autodiagnostico. Se si verifica un guasto ad uno qualsiasi dei dispositivi controllati si interrompe la scansione del programma, si apre il contatto del relè di RUN e si disabilitano le uscite.
63 Indicatori led I/O Sul pannello frontale dei controllori monoblocco sono sempre previsti led luminosi, in quantità pari al numero dei punti I/O, che si accendono quando gli ingressi o le uscite corrispondenti sono attivi.
64 Morsettiere I/O Ogni controllore deve avere una morsettiera cui cablare gli ingressi e le uscite esterne. Allo scopo di non dover ricablare tutti i punti I/O ogni volta che si deve smontare il PLC, spesso tali morsettiere sono separabili da esso per mezzo di un connettore speciale appositamente predisposto.
65 Unità d Ingresso / Uscita L unità ingresso / uscita è composta dai dispositivi adatti a consentire il dialogo del PLC con il gruppo di potenza.
66 Moduli d ingresso I moduli d ingresso operano sui segnali provenienti dai sensori dell impianto per renderli compatibili con la CPU. Le informazioni provenienti dal processo controllato (tramite organi di comando, di impostazione, trasduttori, sensori) possono essere definite con il termine generico di Segnale. I segnali provenienti dai dispositivi in campo si possono distinguere in analogici o digitali.
67 Segnali Digitali Possono assumere solo due livelli di tensione denominati convenzionalmente alto (H o 1) e basso (L o 0) +5 V 0 V +5 V t
68 Segnali Analogici Possono assumere infiniti livelli di tensione all interno di un certo intervallo o range +5 V 0 V +5 V t
69 Moduli d Interfaccia L unità centrale è realizzata con circuiti integrati digitali che operano con la tensione di + 5 Volt c.c. e sono in grado di eseguire delle elaborazioni solo su segnali binari che assumono livelli di tensione di 0 Volt o 5 Volt I moduli di ingresso fungono quindi da interfaccia tra la logica interna del PLC ed i segnali esterni, comunque generati.
70 Moduli d Interfaccia Questi moduli, come tutte le interfacce, attuano non solo un semplice collegamento, ma anche e soprattutto: un adattamento dei livelli di tensione e delle caratteristiche dei segnali il filtraggio dei disturbi la squadratura dei segnali la separazione galvanica dei segnali
71 Modulo d Interfaccia Segnale Attenuatore Partitore Filtro Squadratore Separatore Galvanico al PLC (Bus di Sistema) I segnali provenienti dall esterno possono presentarsi con livelli di tensione diversi, ad esempio 12 Volt, 24 Volt ma anche 110 o 220 Volt e vengono quindi attenuati con opportuni partitori resistivi. Per evitare che i disturbi elettrici (picchi di tensione sulla linea di alimentazione ritorni induttivi dagli attuatori, interferenze provenienti dal cablaggio) introducano false informazioni nel modulo di ingresso, vengono inseriti opportuni filtri che permettono di valutare non solo il livello logico del segnale, ma anche la sua durata e quindi il suo contenuto energetico. Il segnale in uscita dal filtro viene successivamente squadrato perfettamente mediante uno speciale circuito elettronico a doppia soglia (trigger di Schmidt o comparatore di isteresi). Gli ingressi sono normalmente isolati galvanicamente dalla logica interna del PLC, al fine di avere una separazione dei potenziali. Infatti, eventuali sbalzi e sovraccarichi potrebbero essere causa di danni irreparabili per i circuiti integrati interni.
72 Modulo d Interfaccia Segnale Attenuatore Partitore Filtro Convertitore A/D Separatore Galvanico al PLC (Bus di Sistema) La tecnica maggiormente adottata per questa separazione fa uso di optoisolatori: il segnale in arrivo attiva un LED (Light Emitting Diode - diodo emettitore di luce), il quale, emettendo luce, attiva un elemento fotosensibile (in genere un fototransistor) che genera il segnale di livello adatto verso la logica interna del PLC. Se il segnale è di tipo analogico viene sottoposto ad una conversione da analogico a digitale ricevendo una rappresentazione binaria. Come si vede, non esiste continuità galvanica (o metallica) tra ingressi e logica interna, ma i segnali si propagano ugualmente grazie all accoppiamento ottico tra LED e fototransistor.
73 Funzioni di un Modulo d Ingresso Riassumendo, le funzioni di un modulo di ingresso sono: riconoscimento sicuro ed affidabile del livello logico 0 oppure 1 dei segnali trasferimento di questa informazione alla logica interna del PLC protezione della logica interna da eventuali sovratensioni, quindi isolamento galvanico tramite optoisolatori soppressione dei segnali di disturbo adattamento del segnale di ingresso ai livelli di tensione della logica interna della CPU del PLC
74 Moduli d Ingresso Disponibili In generale l Unità d ingresso è modulare ed è in grado di trattare vari tipi di segnali. Sono normalmente disponibili: moduli di ingresso per segnali digitali in C.C. (con e senza separazione galvanica) moduli di ingresso per segnali digitali in C.A. (con e separazione galvanica) moduli di ingresso per segnali analogici (in tensione o corrente)
75 Modulo di ingresso digitale senza separazione galvanica (4 x 24 V DC)
76 Modulo di ingresso digitale con separazione galvanica (8 x 24 V DC)
77 Modulo di ingresso digitale con separazione galvanica (4 x 230 V AC)
78 Moduli di Uscita I moduli di uscita rappresentano sostanzialmente l interfaccia tra l elaborazione del programma, attuata dalla CPU del PLC e gli attuatori che costituiscono il sistema di comando verso l impianto controllato. Le decisioni logiche formulate dal processore vengono inviate tramite il modulo di uscita agli attuatori di comando e agli elementi di segnalazione. Il modulo di uscita: converte il livello dei segnali, che escono dalla CPU negli opportuni livelli richiesti dai dispositivi in campo isola la CPU dai transitori che si possono trovare nella rete esterna
79 Segnali di Uscita I segnali richiesti dagli attuatori si possono suddividere in due categorie: segnali digitali: per gli attuatori ON - 0FF la cui risposta può assumere solo due valori (es.: fermo / in movimento) segnali analogici: per gli attuatori proporzionali la cui risposta può assumere infiniti valori all interno di un certo range (es.: movimento con velocità proporzionale al segnale ricevuto)
80 Moduli di Uscita Digitali Sono normalmente disponibili moduli di uscita: a transistori (con e senza separazione galvanica) per apparecchiature a C.C. ( V) a relè per apparecchiature a C.C. ( V) a relè per apparecchiature a C.A ( V) a triac per apparecchiature a C.A. ( V)
81 Uscite a Relè
82 Uscita a Trasistor
83 Uscita a TRIAC
84 Interfacce per Comunicazione e Trasmissione Dati I PLC utilizzati in sistemi di controllo complessi devono essere collegati in rete tra loro, e con calcolatori elettronici, allo scopo di rendere possibile l integrazione tra i vari livelli dell automazione. La circolazione dei dati avviene grazie a particolari dispositivi, come adattatori, diramatori, ripetitori, modem, ecc..
85 Sistemi di Comunicazione I sistemi di comunicazione più usati sono: RS422, RS232, fibre ottiche La RS422 si usa per il collegamento tra PLC cui si deve ricorrere quando è richiesta una quantità di punti I/O, o di memoria, maggiore di quella permessa da un solo controllore. La RS232 si rende necessaria per collegare il PLC ad un adattatore di linea o direttamente ad un PC. L adattatore serve nel caso in cui si devono trasformare in livelli RS232 i dati trasmessi su fibre ottiche o su cavo RS422. Si ricorre alle fibre ottiche quando occorre garantire un elevata immunità ai disturbi del PLC. Infine i principali parametri da considerare sono i seguenti: velocità di trasmissione distanze massime di trasmissione numero massimo di controllori collegabili
86 Individuazione degli Ingressi e delle Uscite Ad ogni ingresso e ad ogni uscita viene assegnato un indirizzo univoco al quale occorre fare riferimento durante la stesura del programma. Ogni ingresso o uscita possiede un indirizzo relativo al modulo stabilito dalla struttura circuitale e riportato sulla morsettiera (es.: per un modulo di 8 elementi l indirizzo relativo va da 0 a 7) e un indirizzo di base che può dipendere dalla posizione del modulo all interno del rack. Per individuare l indirizzo assoluto di un ingresso o di una uscita occorre sommare all indirizzo di base del modulo l indirizzo relativo dell I/O.
87 Nomenclature dei Morsetti d Ingresso Le nomenclature dei morsetti di ingresso / uscita dipendono dal costruttore. 24 V 0 V S100 1B1 1B2 PLC Ingressi Ad esempio: I 1.0 Indica la connessione al morsetto 0 del modulo 1, dove I sta per Input.
88 Nomenclature dei Morsetti di Uscita PLC Uscite H1 1Y1 0 V Ad esempio: Q 1.0 Indica la connessione al morsetto 0 del modulo 1.
89 Dialogo Operatore - Macchina Per gestire i sistemi automatizzati è necessario stabilire un dialogo tra operatore e macchina. È quindi indispensabile un interfaccia che, permettendo il dialogo tra l operatore ed il PLC, consenta l introduzione in memoria del suddetto programma. Tale funzione è svolta dall unità di programmazione chiamata anche «console» del «programmatore».
90 Funzioni Fondamentali della Console L unità di programmazione deve garantire almeno le seguenti operazioni fondamentali: scrittura del programma nella memoria del PLC lettura del programma contenuto nel controllore modifica (editing) e controllo (test) del programma ricerca di istruzioni del programma compilazione del programma Poiché il programma viene scritto dall utente in un linguaggio comprensibile ad esso ma non direttamente alla CPU, la console è fornita di un «compilatore» ovvero di un software residente su ROM che traduce i codici utilizzati dall operatore in «codici macchina» comprensibili al processore del PLC.
91 Le Funzioni del PLC I controllori programmabili simulano al loro interno un certo numero di operazioni ed inviano alle uscite segnali che sono il risultato di tali simulazioni. Ogni PLC possiede un certo magazzino funzioni. Ingressi esterni (Contatti) Uscite esterne (Bobine) Uscite interne ritentive (relè) Uscite esterne non ritentive (relè) Registro a scorrimento Temporizzatori Contatori Uscite di controllo speciali (relè) Altre varie Sequenziatori logici Operatori Matematico/logici
92 Tipi di Uscite Gli ingressi e le uscite esterne sono gli unici dispositivi effettivamente presenti e pertanto devono essere cablati, ovvero collegati elettricamente alla morsettiera del PLC. Le uscite di controllo interne possono essere di due tipi: ritentive non ritentive
93 Relè Ritentivi e non Ritentivi I relè non ritentivi non mantengono lo stato in caso di caduta di alimentazione; questo significa che se un relè di questo tipo si trova in posizione On al momento dell interruzione dell alimentazione della CPU, esso si troverà in posizione 0ff quando questa sarà riattivata. Le uscite interne ritentive sono anche dette di mantenimento, o relè Latch, perché mantengono il loro stato anche durante un interruzione dell alimentazione.
94 Blocchi Funzionali Contatori, temporizzatori, sequenziatori e registri a scorrimento sono funzioni, dette di box o di blocco funzionale (o non a relè), che emulano i rispettivi dispositivi fisici
95 Elementi Funzionali Matematici Gli operatori matematici consentono al PLC di effettuare operazioni aritmetico-logiche quali: Comparazione (>, <, =, < =, > = ); operazioni aritmetiche (+, -, x, /, ); conversioni di codice numerico (ad esempio Decimale Binario e viceversa) In genere anche queste funzioni sono dette di box.
96 Contatti e Bobine I contatti e le bobine sono gli elementi fondamentali per l elaborazione della logica a relè. I contatti simulati dal controllore possono essere NA (Normalmente Aperto) e NC (Normalmente Chiuso). Si assegna: ad un contatto aperto (che non si trova in tensione 0 V) lo stato logico 0 ad un contatto chiuso (che si trova in tensione 24 V) lo stato logico 1
97 Ingresso NA Un ingresso NA si comporta esattamente come l unità collegata. Se l unità collegata è un circuito aperto (quindi con stato logico 0 ), il contatto NA del programma resta un circuito aperto (con stato logico 0 ). 24 V Start_1 Start_2 Stato logico 0 Stato logico 1 I 0.0 I 0.1 Ingressi PLC Start_1 I AND 1 Start_2 I 0.1 Relè (bobina) 0
98 Ingresso NC Un ingresso NC si comporta in modo opposto all unità collegata; se questa è un circuito aperto il contatto è un circuito chiuso e viceversa. 24 V Start_2 Start_1 Stato logico 0 Stato logico 1 Start_1 Start_2 I 0.0 I AND 1 Relè (bobina) 0 I 0.0 I 0.1Ingressi PLC
99 Bobine I contatti possono essere usati singolarmente, in serie, in parallelo, in serie-parallelo ed in parallelo-serie. Una bobina si eccita (Valore logico 1 ) solamente quando viene preceduta da un percorso di contatti che si trovano allo stato logico 1. La bobina, rappresenta l operatore di scrittura, infatti consente di scrivere un bit in memoria. Le bobine possono essere usate singolarmente o in parallelo.
100 I Linguaggi di Programmazione Un linguaggio dì programmazione consiste nell insieme delle regole che stabiliscono come scrivere le istruzioni necessarie a comunicare al PLC che cosa deve fare. Essi appartengono essenzialmente a due tipologie: linguaggi grafici e linguaggi letterali. Grafici A contatti Grafcet Linguaggi di programmazione dei PLC Letterali Boolean Evoluti Fortran Basic Altri
101 Linguaggi Grafici I linguaggi grafici sono basati sull impostazione del diagramma a contatti, o del grafcet, che risolve l applicazione dal punto di vista logico. Il linguaggio a contatti (KOP) è molto diffuso ed è il primo linguaggio studiato per i PLC. Il linguaggio grafcet si è diffuso, in tempi abbastanza recenti, parallelamente all affermazione conseguita dal metodo grafcet per lo studio dei sistemi automatici, il cui più grande pregio consiste nell estrema semplicità con la quale consente di analizzare processi sequenziali.
102 Linguaggi Letterali Ognuno di tali codici si esprime con parole che traducono o ricordano l operazione cui si riferiscono. Il booleano è noto anche sotto altri nomi: mnemonico, lista istruzioni, AWL sono i più frequentemente utilizzati dai costruttori che, generalmente, adottano proprie sigle per ogni linguaggio, con il risultato di dare un messaggio commerciale meno chiaro di quanto essi credono. I linguaggi evoluti hanno avuto un notevole sviluppo soprattutto in ambienti dove, per certe mansioni, viene utilizzato personale con una cultura informatica di base.
103 Conversione degli schemi elettrici funzionali in diagrammi a contatti ( y ) Consideriamo lo schema elettrico funzionale del circuito di autoritenuta; in esso compaiono gli elementi principali della logica a relè ovvero: contatti NA, contatti NC, bobine e collegamenti. ( y ) + 24 V P M P A ( x ) K K P M I0.0 K M0.0 K P A I0.1 K M0.0 Lamp ( x ) K - M0.0 + Q 0.0 La freccia y indica il flusso di potenza, la freccia x indica il flusso logico. -
104 Passaggio dallo schema elettrico al diagramma a contatti Gli schemi elettrici funzionali sono trasformabili in diagrammi a contatti mediante alcune semplici modifiche: le linee che rappresentano l alimentazione vengono disegnate verticalmente; i simboli dei contatti NA, di quelli NC e delle bobine vengono semplificati nel modo seguente: Contatto normalmente aperto (NA) Contatto normalmente chiuso (NC) Bobina (relè) Il flusso di potenza va da sinistra verso destra; il flusso logico va dall alto verso il basso; ogni circuito viene disegnato in posizione orizzontale invece che verticale.
105 Diagramma a Contatti Con tali semplicissime regole lo schema elettrico si trasforma nel seguente diagramma a contatti: P M I0.0 K P A I0.1 K F0.0 F0.0 K F0.0 Lamp Q 0.0 La linea verticale sinistra può essere pensata come la linea in cui è presente la tensione, quella destra come la linea posta a massa. Con tale convenzione il flusso di energia può andare solo da sinistra verso destra ed è pertanto qui che deve essere posta la bobina da azionare. La linea a sinistra prende il nome di barra, quella destra può addirittura essere omessa.
106 Programma in KOP Il diagramma considerato è costituito da un solo circuito o, come spesso si dice, da una sola linea logica; quando nello schema ci sono più circuiti, le linee che li rappresentano vengono poste in parallelo alla prima, dando luogo ad un immagine grafica molto vicina a quella di una scala a pioli; da questo fatto discendono i nomi ladder o diagramma a scala. Il tratto di ciascuna linea logica a sinistra della bobina viene a volte chiamato zona di test. I contatti NA ed NC, se uniti da linee orizzontali realizzano la funzione AND, se uniti in verticale realizzano la funzione OR.
107 GRAFCET Diagramma funzionale sequenziale
108 GRAFCET Diagramma funzionale sequenziale È una tecnica di rappresentazione grafica messa a punto dall ente francese ADEPA(*). Il grafcet parte dalla considerazione che ogni comando automatico comprende una parte di potenza e una parte di comando e che il legame tra le due è dato da segnali di potenza e da segnali di pilotaggio. Nel grafcet vengono rappresentate le diverse fasi di un ciclo, numerate secondo l ordine di esecuzione a partire dalla prima, è preceduta da uno stato 0 Lo stato 0 rappresenta lo stato iniziale di riposo del sistema, prima di iniziare il ciclo di lavoro, e si evidenzia oltre che con il numero 0 anche con una doppia riquadratura. Accanto al numero d ordine della fase viene riportata, entro un apposito rettangolo, la descrizione dell operazione corrispondente. Tra un fase e la successiva si interpone un trattino orizzontale con l indicazione dell evento che permette il passaggio alla fase successiva (es. finecorsa). (*) Agenzia nazionale per lo sviluppo della produzione automatizzata.
109 Utilità del formalismo: Introduzione Rappresentazione schematica uniforme del comportamento funzionale di un automatismo (comunicazione priva di ambiguità) Ausilio alla progettazione Strumento per la realizzazione dei programmi per PLC Strumento operativo per la manutenzione
110 Elementi base del Grafcet Passo (step) Individua lo stato dell automatismo Ad esso sono associate le azioni Transizione (transiction) Individua le condizioni per il cambiamento di stato dell automatismo Passo iniziale Individua lo stato iniziale
111 Grafcet descrittivo Dato un automatismo così descritto: premendo lo start l automatismo parte premendo lo stop l automatismo si arresta La schematizzazione Grafcet descrittiva è la seguente 0 Stato iniziale START 1 Attivazione automatismo STOP 2 Disattivazione automatismo
112 Grafcet operativo 0 Condizioni iniziali Segnale di pilotaggio dello START 1 Comando di Attivazione automatismo Segnale di pilotaggio dello STOP 2 Comando di Disattivazione automatismo
113 Micro PLC S7-200 SIEMENS ISTRUZIONI ED ESERCITAZIONI
114 La serie S7-200 è una linea di controllori programmabili di dimensioni ridotte (Micro PLC). Un ampia gamma di modelli di CPU con diverse tensioni di alimentazione permette di disporre della flessibilità necessaria per affrontare e risolvere i problemi di automazione. Micro PLC S7-200 SIEMENS
115 Per poter usare un personal computer (PC) si deve disporre di uno dei seguenti set: cavo PC/PPI unità per processore di comunicazione (CP) e cavo per interfaccia multipoint (MPI) scheda per interfaccia multipoint (MPI). La scheda MPI viene fornita con un cavo MPI Requisiti hardware
116 Ciclo di scansione
117 Elenco delle CPU S7-200
118 CPU S7-200 La CPU S7-200 riunisce l unità centrale (CPU), l alimentatore e gli ingressi e uscite digitali in un unico dispositivo autonomo e compatto La CPU esegue il programma e memorizza i dati per il controllo del compito di automazione e del processo L alimentatore fornisce corrente all unità di base e alle unità di ampliamento ad essa collegate Gli ingressi e le uscite costituiscono i punti di controllo del sistema gli ingressi controllano i segnali provenienti dai dispositivi di campo (quali i sensori e gli interruttori); le uscite controllano pompe, motori o altri dispositivi del processo L interfaccia di comunicazione permette di collegare la CPU ad un dispositivo di programmazione o ad altri dispositivi I LED di stato forniscono informazioni sullo stato di funzionamento della CPU (RUN o STOP), lo stato attuale degli I/O locali e gli errori di sistema rilevati Un modulo EEPROM seriale plug-in consente di memorizzare i programmi della CPU
119 CPU S7-200
120 Unità di ampliamento
121 Configurazione di un sistema di automazione S7-200 PC Su cui è stato installato STEP 7-Micro/WIN 32 In ambiente Windows (95, 98, Windows NT 4.0) Almeno 16 MB di RAM e 50 MB di HD CPU S7-200 cavo di connessione PC/PPI CPU 221, CPU 222, CPU 224
122 Errori di installazione L installazione potrebbe non riuscire per le seguenti ragioni Memoria non sufficiente: occorrono almeno 50 MB di spazio libero di memoria sul disco fisso. Dischetto difettoso: verificare la qualità del dischetto, ed in caso negativo rivolgersi al proprio rappresentante o al distributore Errore dell operatore: ricominciare da capo l installazione dopo aver letto attentamente le istruzioni Qualche applicazione non è stata chiusa: potrebbe trattarsi anche della barra degli strumenti di Microsoft Office
P R O G E T T O L A R S A A P P U N T I S U L P. L. C.
 P R O G E T T O L A R S A A P P U N T I S U L P. L. C. L automazione di un qualunque procedimento industriale si ottiene mediante un insieme d apparecchiature, opportunamente collegate tra loro, in modo
P R O G E T T O L A R S A A P P U N T I S U L P. L. C. L automazione di un qualunque procedimento industriale si ottiene mediante un insieme d apparecchiature, opportunamente collegate tra loro, in modo
Corso PLC - Manuale Pratico 1
 Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
39 Il linguaggio grafico a contatti
 39 Il linguaggio grafico a contatti Diagramma a contatti, ladder, diagramma a scala sono nomi diversi usati per indicare la stessa cosa, il codice grafico per la programmazione dei PLC con il linguaggio
39 Il linguaggio grafico a contatti Diagramma a contatti, ladder, diagramma a scala sono nomi diversi usati per indicare la stessa cosa, il codice grafico per la programmazione dei PLC con il linguaggio
PLC Programmable Logic Controller
 PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
Architettura hardware
 Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
IL PLC 1/9. permanente, la memoria volatile e i pin di I/O, oltre ad eventuali altri blocchi specializzati.
 IL PLC 1/9 Storia Il motivo per il quale nacque il PLC fu la necessità di eliminare i costi elevati per rimpiazzare i sistemi complicatissimi basati su relè. Nel anni 70 la società Beadford Associates
IL PLC 1/9 Storia Il motivo per il quale nacque il PLC fu la necessità di eliminare i costi elevati per rimpiazzare i sistemi complicatissimi basati su relè. Nel anni 70 la società Beadford Associates
LABORATORIO DI SISTEMI
 ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
PLC - Linguaggi. I linguaggi di programmazione dei PLC sono orientati ai problemi di automazione e utilizzano soprattutto:
 PLC - Linguaggi Il software è l elemento determinante per dare all hardware del PLC quella flessibilità che i sistemi di controllo a logica cablata non possiedono. Il software che le aziende producono
PLC - Linguaggi Il software è l elemento determinante per dare all hardware del PLC quella flessibilità che i sistemi di controllo a logica cablata non possiedono. Il software che le aziende producono
C. P. U. MEMORIA CENTRALE
 C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
Esame di INFORMATICA
 Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
PLC Sistemi a Logica Programmabile
 PLC Sistemi a Logica Programmabile Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso @ ipsiaferraris.it
PLC Sistemi a Logica Programmabile Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso @ ipsiaferraris.it
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
SISTEMI DI ELABORAZIONE DELLE INFORMAZIONI
 SISTEMI DI ELABORAZIONE DELLE INFORMAZIONI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: martedì, 12.00-13.00. Dip. Di Matematica Modalità esame: scritto + tesina facoltativa 1
SISTEMI DI ELABORAZIONE DELLE INFORMAZIONI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: martedì, 12.00-13.00. Dip. Di Matematica Modalità esame: scritto + tesina facoltativa 1
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Informatica - A.A. 2010/11
 Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
ARCHITETTURA DI RETE FOLEGNANI ANDREA
 ARCHITETTURA DI RETE FOLEGNANI ANDREA INTRODUZIONE È denominata Architettura di rete un insieme di livelli e protocolli. Le reti sono organizzate gerarchicamente in livelli, ciascuno dei quali interagisce
ARCHITETTURA DI RETE FOLEGNANI ANDREA INTRODUZIONE È denominata Architettura di rete un insieme di livelli e protocolli. Le reti sono organizzate gerarchicamente in livelli, ciascuno dei quali interagisce
KEYSTONE. OM8 - EPI 2 Modulo interfaccia AS-i Manuale di istruzione. www.pentair.com/valves. Indice 1 Modulo Opzionale OM8: Interfaccia AS-i 1
 KEYSTONE Indice 1 Modulo Opzionale OM8: Interfaccia AS-i 1 2 Installazione 1 3 Dettagli sulla comunicazione 1 5 Descrizione del modulo interfaccia AS-i OM8 2 5 Protocollo interfaccia AS-i 3 6 Interfaccia
KEYSTONE Indice 1 Modulo Opzionale OM8: Interfaccia AS-i 1 2 Installazione 1 3 Dettagli sulla comunicazione 1 5 Descrizione del modulo interfaccia AS-i OM8 2 5 Protocollo interfaccia AS-i 3 6 Interfaccia
La tecnica proporzionale
 La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
CIRCUITI OLEODINAMICI ELEMENTARI
 CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
Excel. A cura di Luigi Labonia. e-mail: luigi.lab@libero.it
 Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
Appunti sulla Macchina di Turing. Macchina di Turing
 Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Memorie ROM (Read Only Memory)
") Memorie ROM (Read Only Memory) Considerando la prima forma canonica, la realizzazione di qualsiasi funzione di m variabili richiede un numero di porte AND pari al numero dei suoi mintermini e di prolungare
Memorie ROM (Read Only Memory) Considerando la prima forma canonica, la realizzazione di qualsiasi funzione di m variabili richiede un numero di porte AND pari al numero dei suoi mintermini e di prolungare
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione.
 Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte
 PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte Prima Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi
PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte Prima Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Struttura del calcolatore
 Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Sommario. Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi.
 Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Il software impiegato su un computer si distingue in: Sistema Operativo Compilatori per produrre programmi
 Il Software Il software impiegato su un computer si distingue in: Software di sistema Sistema Operativo Compilatori per produrre programmi Software applicativo Elaborazione testi Fogli elettronici Basi
Il Software Il software impiegato su un computer si distingue in: Software di sistema Sistema Operativo Compilatori per produrre programmi Software applicativo Elaborazione testi Fogli elettronici Basi
Input/Output. Moduli di Input/ Output. gestiscono quantità di dati differenti a velocità diverse in formati diversi. n Grande varietà di periferiche
 Input/Output n Grande varietà di periferiche gestiscono quantità di dati differenti a velocità diverse in formati diversi n Tutti più lenti della CPU e della RAM n Necessità di avere moduli di I/O Moduli
Input/Output n Grande varietà di periferiche gestiscono quantità di dati differenti a velocità diverse in formati diversi n Tutti più lenti della CPU e della RAM n Necessità di avere moduli di I/O Moduli
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Architettura di un calcolatore
 2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
CPU. Maurizio Palesi
 CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
Software relazione. Software di base Software applicativo. Hardware. Bios. Sistema operativo. Programmi applicativi
 Software relazione Hardware Software di base Software applicativo Bios Sistema operativo Programmi applicativi Software di base Sistema operativo Bios Utility di sistema software Software applicativo Programmi
Software relazione Hardware Software di base Software applicativo Bios Sistema operativo Programmi applicativi Software di base Sistema operativo Bios Utility di sistema software Software applicativo Programmi
All interno del computer si possono individuare 5 componenti principali: SCHEDA MADRE. MICROPROCESSORE che contiene la CPU MEMORIA RAM MEMORIA ROM
 Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Ing. Paolo Domenici PREFAZIONE
 Ing. Paolo Domenici SISTEMI A MICROPROCESSORE PREFAZIONE Il corso ha lo scopo di fornire i concetti fondamentali dei sistemi a microprocessore in modo semplice e interattivo. È costituito da una parte
Ing. Paolo Domenici SISTEMI A MICROPROCESSORE PREFAZIONE Il corso ha lo scopo di fornire i concetti fondamentali dei sistemi a microprocessore in modo semplice e interattivo. È costituito da una parte
Software di sistema e software applicativo. I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche
 Software di sistema e software applicativo I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche Software soft ware soffice componente è la parte logica
Software di sistema e software applicativo I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche Software soft ware soffice componente è la parte logica
NOZIONI ELEMENTARI DI HARDWARE E SOFTWARE
 CORSO INTRODUTTIVO DI INFORMATICA NOZIONI ELEMENTARI DI HARDWARE E SOFTWARE Dott. Paolo Righetto 1 CORSO INTRODUTTIVO DI INFORMATICA Percorso dell incontro: 1) Alcuni elementi della configurazione hardware
CORSO INTRODUTTIVO DI INFORMATICA NOZIONI ELEMENTARI DI HARDWARE E SOFTWARE Dott. Paolo Righetto 1 CORSO INTRODUTTIVO DI INFORMATICA Percorso dell incontro: 1) Alcuni elementi della configurazione hardware
Architettura dei computer
 Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore (CPU) la memoria principale (RAM) la memoria secondaria i dispositivi di input/output Il processore
Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore (CPU) la memoria principale (RAM) la memoria secondaria i dispositivi di input/output Il processore
FONDAMENTI di INFORMATICA L. Mezzalira
 FONDAMENTI di INFORMATICA L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software
FONDAMENTI di INFORMATICA L. Mezzalira Possibili domande 1 --- Caratteristiche delle macchine tipiche dell informatica Componenti hardware del modello funzionale di sistema informatico Componenti software
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
Gerarchia delle memorie
 Memorie Gerarchia delle memorie Cache CPU Centrale Massa Distanza Capacità Tempi di accesso Costo 2 1 Le memorie centrali Nella macchina di Von Neumann, le istruzioni e i dati sono contenute in una memoria
Memorie Gerarchia delle memorie Cache CPU Centrale Massa Distanza Capacità Tempi di accesso Costo 2 1 Le memorie centrali Nella macchina di Von Neumann, le istruzioni e i dati sono contenute in una memoria
RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000
 RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 DESCRIZIONE GENERALE L espansore senza fili è un modulo
RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 DESCRIZIONE GENERALE L espansore senza fili è un modulo
G S M C O M M A N D E R Duo S
 Il GSM Commander Duo S permette, di attivare indipendentemente o contemporaneamente due contatti elettrici, Contatto1 (C1) e Contatto2 (C2), attraverso una chiamata telefonica a costo zero al numero della
Il GSM Commander Duo S permette, di attivare indipendentemente o contemporaneamente due contatti elettrici, Contatto1 (C1) e Contatto2 (C2), attraverso una chiamata telefonica a costo zero al numero della
PROGRAMMAZIONE DIDATTICA ANNUALE. SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica
 ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
La gestione di un calcolatore. Sistemi Operativi primo modulo Introduzione. Sistema operativo (2) Sistema operativo (1)
 Sistema operativo (1)") La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione
 PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
Introduzione. Classificazione di Flynn... 2 Macchine a pipeline... 3 Macchine vettoriali e Array Processor... 4 Macchine MIMD... 6
 Appunti di Calcolatori Elettronici Esecuzione di istruzioni in parallelo Introduzione... 1 Classificazione di Flynn... 2 Macchine a pipeline... 3 Macchine vettoriali e Array Processor... 4 Macchine MIMD...
Appunti di Calcolatori Elettronici Esecuzione di istruzioni in parallelo Introduzione... 1 Classificazione di Flynn... 2 Macchine a pipeline... 3 Macchine vettoriali e Array Processor... 4 Macchine MIMD...
Reti sequenziali. Esempio di rete sequenziale: distributore automatico.
 Reti sequenziali 1 Reti sequenziali Nelle RETI COMBINATORIE il valore logico delle variabili di uscita, in un dato istante, è funzione solo dei valori delle variabili di ingresso in quello stesso istante.
Reti sequenziali 1 Reti sequenziali Nelle RETI COMBINATORIE il valore logico delle variabili di uscita, in un dato istante, è funzione solo dei valori delle variabili di ingresso in quello stesso istante.
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 La CPU e l esecuzione dei programmi 1 Nelle lezioni precedenti abbiamo detto che Un computer è costituito da 3 principali componenti:
per chimica industriale e chimica applicata e ambientale LEZIONE 4 La CPU e l esecuzione dei programmi 1 Nelle lezioni precedenti abbiamo detto che Un computer è costituito da 3 principali componenti:
BMSO1001. Virtual Configurator. Istruzioni d uso 02/10-01 PC
 BMSO1001 Virtual Configurator Istruzioni d uso 02/10-01 PC 2 Virtual Configurator Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Concetti
BMSO1001 Virtual Configurator Istruzioni d uso 02/10-01 PC 2 Virtual Configurator Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Concetti
Circuiti pneumatici. Prof. Luciano Scattolini
 Circuiti pneumatici Circuiti pneumatici È un insieme di attuatori pneumatici comandati da valvole Lo scopo consiste nel trasformare energia pneumatica in energia meccanica Comando di cilindro a semplice
Circuiti pneumatici Circuiti pneumatici È un insieme di attuatori pneumatici comandati da valvole Lo scopo consiste nel trasformare energia pneumatica in energia meccanica Comando di cilindro a semplice
I componenti di un Sistema di elaborazione. Memoria centrale. È costituita da una serie di CHIP disposti su una scheda elettronica
 I componenti di un Sistema di elaborazione. Memoria centrale Memorizza : istruzioni dati In forma BINARIA : 10001010101000110101... È costituita da una serie di CHIP disposti su una scheda elettronica
I componenti di un Sistema di elaborazione. Memoria centrale Memorizza : istruzioni dati In forma BINARIA : 10001010101000110101... È costituita da una serie di CHIP disposti su una scheda elettronica
ALGEBRA DELLE PROPOSIZIONI
 Università di Salerno Fondamenti di Informatica Corso di Laurea Ingegneria Corso B Docente: Ing. Giovanni Secondulfo Anno Accademico 2010-2011 ALGEBRA DELLE PROPOSIZIONI Fondamenti di Informatica Algebra
Università di Salerno Fondamenti di Informatica Corso di Laurea Ingegneria Corso B Docente: Ing. Giovanni Secondulfo Anno Accademico 2010-2011 ALGEBRA DELLE PROPOSIZIONI Fondamenti di Informatica Algebra
Corso di Informatica
 Corso di Informatica Modulo T2 3-Compilatori e interpreti 1 Prerequisiti Principi di programmazione Utilizzo di un compilatore 2 1 Introduzione Una volta progettato un algoritmo codificato in un linguaggio
Corso di Informatica Modulo T2 3-Compilatori e interpreti 1 Prerequisiti Principi di programmazione Utilizzo di un compilatore 2 1 Introduzione Una volta progettato un algoritmo codificato in un linguaggio
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
Introduzione alla programmazione in C
 Introduzione alla programmazione in C Testi Consigliati: A. Kelley & I. Pohl C didattica e programmazione B.W. Kernighan & D. M. Ritchie Linguaggio C P. Tosoratti Introduzione all informatica Materiale
Introduzione alla programmazione in C Testi Consigliati: A. Kelley & I. Pohl C didattica e programmazione B.W. Kernighan & D. M. Ritchie Linguaggio C P. Tosoratti Introduzione all informatica Materiale
Algebra Di Boole. Definiamo ora che esiste un segnale avente valore opposto di quello assunto dalla variabile X.
 Algebra Di Boole L algebra di Boole è un ramo della matematica basato sul calcolo logico a due valori di verità (vero, falso). Con alcune leggi particolari consente di operare su proposizioni allo stesso
Algebra Di Boole L algebra di Boole è un ramo della matematica basato sul calcolo logico a due valori di verità (vero, falso). Con alcune leggi particolari consente di operare su proposizioni allo stesso
Liceo Tecnologico. Indirizzo Elettrico Elettronico. Indicazioni nazionali per Piani di Studi Personalizzati
 Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Sistemi di Automazione Industriale
 Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Scuola Secondaria di Primo Grado Anna Frank Nome Cognome classe anno sc. 2008/09 INFORMATICA
 Scuola Secondaria di Primo Grado Anna Frank Nome Cognome classe anno sc. 2008/09 INFORMATICA Il termine informatica riassume due parole, informazione automatica, e si occupa dei sistemi per l elaborazione
Scuola Secondaria di Primo Grado Anna Frank Nome Cognome classe anno sc. 2008/09 INFORMATICA Il termine informatica riassume due parole, informazione automatica, e si occupa dei sistemi per l elaborazione
CONTROLLORI LOGICI PROGRAMMABILI PLC
 CONTROLLORI LOGICI PROGRAMMABILI Introduzione ai comandi elettronici e ai controllori logici programmabili L automazione di una qualsiasi operazione di un processo produttivo viene conseguita attraverso
CONTROLLORI LOGICI PROGRAMMABILI Introduzione ai comandi elettronici e ai controllori logici programmabili L automazione di una qualsiasi operazione di un processo produttivo viene conseguita attraverso
Lezione 8. La macchina universale
 Lezione 8 Algoritmi La macchina universale Un elaboratore o computer è una macchina digitale, elettronica, automatica capace di effettuare trasformazioni o elaborazioni su i dati digitale= l informazione
Lezione 8 Algoritmi La macchina universale Un elaboratore o computer è una macchina digitale, elettronica, automatica capace di effettuare trasformazioni o elaborazioni su i dati digitale= l informazione
Unità intelligenti serie DAT9000
 COMPONENTI PER L ELETTRONICA INDUSTRIALE E IL CONTROLLO DI PROCESSO Unità intelligenti serie DAT9000 NUOVA LINEA 2010 www.datexel.it serie DAT9000 Le principali funzioni da esse supportate, sono le seguenti:
COMPONENTI PER L ELETTRONICA INDUSTRIALE E IL CONTROLLO DI PROCESSO Unità intelligenti serie DAT9000 NUOVA LINEA 2010 www.datexel.it serie DAT9000 Le principali funzioni da esse supportate, sono le seguenti:
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
Airone Gestione Rifiuti Funzioni di Esportazione e Importazione
 Airone Gestione Rifiuti Funzioni di Esportazione e Importazione Airone Funzioni di Esportazione Importazione 1 Indice AIRONE GESTIONE RIFIUTI... 1 FUNZIONI DI ESPORTAZIONE E IMPORTAZIONE... 1 INDICE...
Airone Gestione Rifiuti Funzioni di Esportazione e Importazione Airone Funzioni di Esportazione Importazione 1 Indice AIRONE GESTIONE RIFIUTI... 1 FUNZIONI DI ESPORTAZIONE E IMPORTAZIONE... 1 INDICE...
Esame di Stato 2015. Materia: SISTEMI AUTOMATICI PRIMA PARTE
 Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Reti sequenziali sincrone
 Reti sequenziali sincrone Un approccio strutturato (7.1-7.3, 7.5-7.6) Modelli di reti sincrone Analisi di reti sincrone Descrizioni e sintesi di reti sequenziali sincrone Sintesi con flip-flop D, DE, T
Reti sequenziali sincrone Un approccio strutturato (7.1-7.3, 7.5-7.6) Modelli di reti sincrone Analisi di reti sincrone Descrizioni e sintesi di reti sequenziali sincrone Sintesi con flip-flop D, DE, T
Architettura del calcolatore
 Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Manuale Terminal Manager 2.0
 Manuale Terminal Manager 2.0 CREAZIONE / MODIFICA / CANCELLAZIONE TERMINALI Tramite il pulsante NUOVO possiamo aggiungere un terminale alla lista del nostro impianto. Comparirà una finestra che permette
Manuale Terminal Manager 2.0 CREAZIONE / MODIFICA / CANCELLAZIONE TERMINALI Tramite il pulsante NUOVO possiamo aggiungere un terminale alla lista del nostro impianto. Comparirà una finestra che permette
Scheduling della CPU. Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux
 Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Il Sistema Operativo. C. Marrocco. Università degli Studi di Cassino
 Il Sistema Operativo Il Sistema Operativo è uno strato software che: opera direttamente sull hardware; isola dai dettagli dell architettura hardware; fornisce un insieme di funzionalità di alto livello.
Il Sistema Operativo Il Sistema Operativo è uno strato software che: opera direttamente sull hardware; isola dai dettagli dell architettura hardware; fornisce un insieme di funzionalità di alto livello.
PANNELLO REMOTO PER BARRIERE 48BFC000 E 48BFC001
 PANNELLO REMOTO PER BARRIERE 48BFC000 E 48BFC001 ART.48BFA000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 CARATTERISTICHE GENERALI Il terminale 48BFA000 permette di
PANNELLO REMOTO PER BARRIERE 48BFC000 E 48BFC001 ART.48BFA000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 CARATTERISTICHE GENERALI Il terminale 48BFA000 permette di
Siamo così arrivati all aritmetica modulare, ma anche a individuare alcuni aspetti di come funziona l aritmetica del calcolatore come vedremo.
 DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
SISTEMI DI ACQUISIZIONE
 SISTEMI DI ACQUISIZIONE Introduzione Lo scopo dei sistemi di acquisizione dati è quello di controllo delle grandezze fisiche sia nella ricerca pura, nelle aziende e, per i piccoli utenti. I vantaggi sono:
SISTEMI DI ACQUISIZIONE Introduzione Lo scopo dei sistemi di acquisizione dati è quello di controllo delle grandezze fisiche sia nella ricerca pura, nelle aziende e, per i piccoli utenti. I vantaggi sono:
Approccio stratificato
 Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
A intervalli regolari ogni router manda la sua tabella a tutti i vicini, e riceve quelle dei vicini.
 Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
Il sistema di rilevazione dati per il controllo globale delle macchine di produzione
 1 Il sistema di rilevazione dati per il controllo globale delle macchine di produzione Per automatizzare Ia raccolta dati di produzione e monitorare in tempo reale il funzionamento delle macchine, Meta
1 Il sistema di rilevazione dati per il controllo globale delle macchine di produzione Per automatizzare Ia raccolta dati di produzione e monitorare in tempo reale il funzionamento delle macchine, Meta
L informatica INTRODUZIONE. L informatica. Tassonomia: criteri. È la disciplina scientifica che studia
 L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
SOFTWARE PER LA RILEVAZIONE DEI TEMPI PER CENTRI DI COSTO
 SOFTWARE PER LA RILEVAZIONE DEI TEMPI PER CENTRI DI COSTO Descrizione Nell ambito della rilevazione dei costi, Solari con l ambiente Start propone Time&Cost, una applicazione che contribuisce a fornire
SOFTWARE PER LA RILEVAZIONE DEI TEMPI PER CENTRI DI COSTO Descrizione Nell ambito della rilevazione dei costi, Solari con l ambiente Start propone Time&Cost, una applicazione che contribuisce a fornire
NORMA CEI EN 61131. PLC: programmazione. PLC: programmazione. PLC: programmazione. Automazione Industriale 3. Automazione Industriale
 NORMA CEI EN 61131 Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 La normativa IEC 1131 del 1993 ha standardizzato 5
NORMA CEI EN 61131 Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 La normativa IEC 1131 del 1993 ha standardizzato 5
Concetti fondamentali della Tecnologia Dell informazione Parte prima
 Concetti fondamentali della Tecnologia Dell informazione Parte prima 1 Concetti di base della tecnologia dell Informazione Nel corso degli ultimi anni la diffusione dell Information and Communication Technology
Concetti fondamentali della Tecnologia Dell informazione Parte prima 1 Concetti di base della tecnologia dell Informazione Nel corso degli ultimi anni la diffusione dell Information and Communication Technology
23/02/2014. Dalla scorsa lezione. La Macchina di Von Neumann. Uomo come esecutore di algoritmi
 Dalla scorsa lezione LABORATORIO DI PROGRAMMAZIONE Corso di laurea in matematica LA MACCHINA DI VON NEUMANN Marco Lapegna Dipartimento di Matematica e Applicazioni Universita degli Studi di Napoli Federico
Dalla scorsa lezione LABORATORIO DI PROGRAMMAZIONE Corso di laurea in matematica LA MACCHINA DI VON NEUMANN Marco Lapegna Dipartimento di Matematica e Applicazioni Universita degli Studi di Napoli Federico
Elenco unità capitalizzabili non presenti nello standard nazionale
 Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
In un modello a strati il SO si pone come un guscio (shell) tra la macchina reale (HW) e le applicazioni 1 :
 tra la macchina reale (HW) e le applicazioni 1 :") Un Sistema Operativo è un insieme complesso di programmi che, interagendo tra loro, devono svolgere una serie di funzioni per gestire il comportamento del computer e per agire come intermediario consentendo
Un Sistema Operativo è un insieme complesso di programmi che, interagendo tra loro, devono svolgere una serie di funzioni per gestire il comportamento del computer e per agire come intermediario consentendo
Ciclo di Istruzione. Ciclo di Istruzione. Controllo. Ciclo di Istruzione (diagramma di flusso) Lezione 5 e 6
 Lezione 5 e 6") Ciclo di Istruzione Può essere suddiviso in 4 tipi di sequenze di microoperazioni (cioè attività di calcolo aritmetico/logico, trasferimento e memorizzazione dei dati), non tutte necessariamente da realizzare
Ciclo di Istruzione Può essere suddiviso in 4 tipi di sequenze di microoperazioni (cioè attività di calcolo aritmetico/logico, trasferimento e memorizzazione dei dati), non tutte necessariamente da realizzare
Simbologia pneumatica
 Simbologia pneumatica Fonte/Sorgente di pressione E l alimentazione/alimentatore di ogni circuito pneumatico. È generalmente costituito da un compressore che comprime l aria all interno di un serbatoio.
Simbologia pneumatica Fonte/Sorgente di pressione E l alimentazione/alimentatore di ogni circuito pneumatico. È generalmente costituito da un compressore che comprime l aria all interno di un serbatoio.
IL CONTROLLO DI UN PROCESSO
 IL CONTROLLO DI UN PROCESSO 1 IL CONTROLLO DI UN PROCESSO Schema a blocchi 2 Il controllore può essere: A LOGICA CABLATA A LOGICA PROGRAMMABILE 3 CONTROLLORE A LOGICA CABLATA (*) (Wired Logic Control)
IL CONTROLLO DI UN PROCESSO 1 IL CONTROLLO DI UN PROCESSO Schema a blocchi 2 Il controllore può essere: A LOGICA CABLATA A LOGICA PROGRAMMABILE 3 CONTROLLORE A LOGICA CABLATA (*) (Wired Logic Control)
Cosa è un foglio elettronico
 Cosa è un foglio elettronico Versione informatica del foglio contabile Strumento per l elaborazione di numeri (ma non solo...) I valori inseriti possono essere modificati, analizzati, elaborati, ripetuti
Cosa è un foglio elettronico Versione informatica del foglio contabile Strumento per l elaborazione di numeri (ma non solo...) I valori inseriti possono essere modificati, analizzati, elaborati, ripetuti
CABINE ELETTRICHE DI TRASFORMAZIONE
 Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Informatica B a.a 2005/06 (Meccanici 4 squadra) PhD. Ing. Michele Folgheraiter
 PhD. Ing. Michele Folgheraiter") Informatica B a.a 2005/06 (Meccanici 4 squadra) Scaglione: da PO a ZZZZ PhD. Ing. Michele Folgheraiter Architettura del Calcolatore Macchina di von Neumann Il calcolatore moderno è basato su un architettura
Informatica B a.a 2005/06 (Meccanici 4 squadra) Scaglione: da PO a ZZZZ PhD. Ing. Michele Folgheraiter Architettura del Calcolatore Macchina di von Neumann Il calcolatore moderno è basato su un architettura
Creare una Rete Locale Lezione n. 1
 Le Reti Locali Introduzione Le Reti Locali indicate anche come LAN (Local Area Network), sono il punto d appoggio su cui si fonda la collaborazione nel lavoro in qualunque realtà, sia essa un azienda,
Le Reti Locali Introduzione Le Reti Locali indicate anche come LAN (Local Area Network), sono il punto d appoggio su cui si fonda la collaborazione nel lavoro in qualunque realtà, sia essa un azienda,
LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1
 LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1 I CODICI 1 IL CODICE BCD 1 Somma in BCD 2 Sottrazione BCD 5 IL CODICE ECCESSO 3 20 La trasmissione delle informazioni Quarta Parte I codici Il codice BCD
LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1 I CODICI 1 IL CODICE BCD 1 Somma in BCD 2 Sottrazione BCD 5 IL CODICE ECCESSO 3 20 La trasmissione delle informazioni Quarta Parte I codici Il codice BCD
4 3 4 = 4 x 10 2 + 3 x 10 1 + 4 x 10 0 aaa 10 2 10 1 10 0
 Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO
 PIANO DI LAVORO CLASSE 4 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: SISTEMI E MODELLI (30 ore)
PIANO DI LAVORO CLASSE 4 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: SISTEMI E MODELLI (30 ore)