CINEMATICA DEI MECCANISMI DEFINIZIONI
|
|
|
- Ugo Pizzi
- 8 anni fa
- Visualizzazioni
Transcript
1 CINEMATICA APPLICATA Indice Cinematica del punto materiale Definizioni Tipologie di moto Strumenti matematici Applicazioni Cinematica del corpo rigido Definizioni Centro di istantanea rotazione Formula fondamentale della cinematica Rotazione del corpo rigido Coppie cinematiche Gradi di libertà Analisi cinematica 1 CINEMATICA DEI MECCANISMI DEFINIZIONI MEMBRO: elemento di macchina in movimento rispetto agli altri e ad essi connesso tramite coppie cinematiche TELAIO: membro fisso rispetto a un riferimento assoluto 2 1

2 Membri MOVENTI: membri sui quali agiscono forze esterne che compiono lavoro positivo, detto lavoro motore Membri CEDENTI: membri sui quali agiscono forze esterne che compiono lavoro negativo, detto lavoro resistente Motore a combustione interna movente cedente 3 ELEMENTO CINEMATICO: parte, superficie, di un membro che è a contatto di una parte di un altro membro COPPIA CINEMATICA: insieme di due elementi cinematici Sistema di due corpi rigidi che si muovono di moto relativo tra loro, con il vincolo che una superficie solidale al primo corpo strisci e/o rotoli costantemente durante il moto su una superficie solidale al secondo. 4 2

3 5 COPPIE CINEMATICHE SUPERIORI contatti lineari o puntiformi (non realizzabili tramite contatti di superficie) 6 3

4 CATENA CINEMATICA unione di più membri ottenuta con coppie cinematiche, in modo che, fissate le velocità di un numero di membri pari ai gradi di libertà, risultino univocamente determinate le velocità relative di tutti gli altri membri 7 Catena cinematica APERTA se esiste un membro con un solo accoppiamento 8 4

5 Catena cinematica CHIUSA ogni membro è accoppiato ad ambo le parti. MECCANISMO catena cinematica con un membro fisso il membro fisso è detto TELAIO 9 COORDINATE = posizione di punti o corpi rigidi è identificata da spostamenti e/o angoli Le COORDINATE devono essere sufficienti e indipendenti COORDINATE GENERALIZZATE = insieme di coordinate sufficienti e indipendenti Il moto di punti, o corpi rigidi, è rappresentato dalla evoluzione delle coordinate nel dominio del tempo 10 5

6 GRADI DI LIBERTÀ DI CATENE CINEMATICHE E MECCANISMI EQUAZIONE DI STRUTTURA Catena cinematica nello spazio 3D N = 6 m 5c 1 4c 2 3c 3 2c 4 c 5 = n + 6 N numero di gradi di libertà della catena cinematica Meccanismi nello spazio 3D n = 6(m 1) 5c 1 4c 2 3c 3 2c 4 c 5 n numero di gradi di libertà (grado di mobilità) di un meccanismo m membri rigidi, uno dei quali è il telaio c i numero delle coppie cinematiche di classe i presenti nel meccanismo 11 Robot SCARA 4gradi di libertà 12 6

7 Robot PUMA 6 gradi di Libertà 13 Meccanismi nel PIANO Nel piano un corpo libero ha 3 gradi di libertà: 2 coordinate di posizione 1 coordinata di rotazione Equazione di Grübler : n = 3(m 1) 2c1 c2 c 1 c 2 numero delle coppie cinematiche di classe 1 (rotoidali, prismatiche) numero delle coppie cinematiche di classe 2 (camme piane) se n 1si tratta di un meccanismo se n = 0si tratta di una struttura isostatica se n < 0si tratta di una struttura iperstatica 14 7

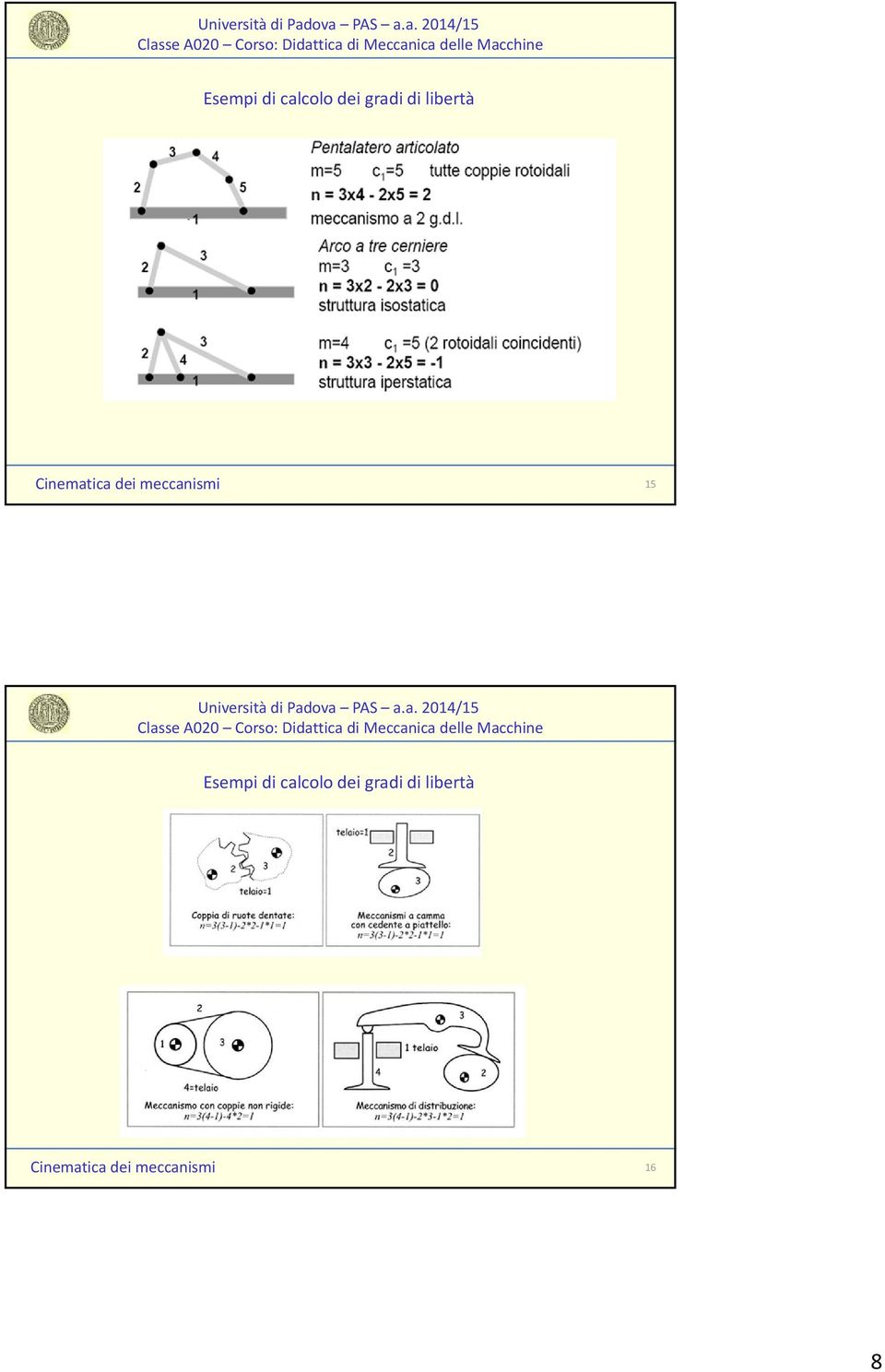
8 Esempi di calcolo dei gradi di libertà 15 Esempi di calcolo dei gradi di libertà 16 8
9 CASI PARTICOLARI Meccanismo con camma e punteria a rotella Morsa da banco 17 CASI PARTICOLARI Ombrello Giunto di Cardano 18 9

10 QUADRILATERI ARTICOLATI 19 Applicazioni del QUADRILATERO ARTICOLATO 20 10

11 CLASSIFICAZIONE DEI QUADRILATERI Quadrilatero di Grashof: Lmax + Lmin L3 + L4 regole di Grashof: il telaio è il più corto: quadrilatero a doppia manovella la biella è il membro più corto: quadrilatero a doppio bilanciere una delle due aste collegate al telaio è il membro più corto quadrilatero manovella bilanciere (l asta più corta è la manovella) Quadrilatero NON di Grashof: Lmax + Lmin > L3 + L4 Quadrilatero è sempre a doppio bilanciere
 Quadrilatero NON di Grashof: Lmax + Lmin > L3 + L4 Quadrilatero è sempre a doppio bilanciere.")
12 23 Applicazioni del QUADRILATERO ARTICOLATO Azionamento del tergicristallo 24 12

13 Applicazioni del QUADRILATERO ARTICOLATO Azionamento del tergicristallo Rotazione del cedente bilanciere Azione di tergitura angolo biella 2 30 [deg] [rad/s] 0-2 velocità angolare biella [deg] q [deg] angolo cedente-bilanciere 3 [rad/s] q [deg] velocità angolare cedente-bilanciere q [deg] Angoli rotazione [rad/s 2 ] accelerazione angolare biella q [deg] Velocità angolari q [deg] [rad/s 2 ] 0 accelerazione angolare cedente-bilanciere q [deg] Accelerazioni angolari 26 13
![angolare cedente-bilanciere 0 0 50 100 150 200 250 300 350 q [deg] Angoli rotazione 30 2 20 [rad/s 2 ] 10 0-10 -20 accelerazione angolare biella -10 0 50 100 150 200 250 300 350 q [deg]](/docs-images/41/14714659/images/page_13.jpg "Velocità angolari -30 0 50 100 150 200 250 300 350 q [deg] 100 3 50 [rad/s 2 ] 0 accelerazione angolare cedente-bilanciere -50-100 0 50 100 150 200 250 300 350 q [deg] Accelerazioni")
14 Applicazioni del PARALLELOGRAMMA ARTICOLATO Giostre 27 Applicazioni del PENTALATERO Pantografo 28 14

15 Applicazioni MANOVELLISMO DI SPINTA CENTRATO Motore a C.I. Compressore alternativo 29 Pressa Applicazione MANOVELLISMO DI SPINTA CENTRATO Seghetto alternativo 30 15

16 Applicazione MANOVELLISMO DI SPINTA CENTRATO Moto del pattino Espressione esatta x C r cos( t) L r 2 sin2( t 1 ) L2 Espressione semplificata x C r cos( t) L r 2 sin2( t ) L2 31 MECCANISMI PIANI con CAMMA 32 16
 L2 31 MECCANISMI PIANI con CAMMA 32")
17 MECCANISMI PIANI con CAMMA 33 Definizioni MECCANISMI PIANI con CAMMA Legge della ALZATA (spostamento del cedente) 34 17
 34")
18 Angolo di Pressione 35 Leggi di salita 36 18

19 Leggi di salita ottimale 37 Applicazione delle camme Distribuzione di un motore C.I. monocilindrico Camma POLICENTRICA 38 19

20 Profilo della camma in coordinate polari Arco Raggio di curvatura Centro di curvatura [mm] [deg] [deg] [mm] x C y C iniziale finale A B C rampa D E rampa F G Profilo della camma in coordinate polari Legge della ALZATA salita discesa riposo rampa rampa 40 20

21 Cinematica del cedente 0.02 velocità 0.01 s'(q) 0 jerk q [deg] s"(q) 0.05 accelerazione q [deg] 41 21
Cap. 1 - STRUTTURA DELLE MACCHINE
 Cap. 1 - STRUTTURA DELLE MACCHINE 1.1 Oggetto dello studio 1.2 La macchina come sistema 1.3 Studio delle macchine 1.4 Coppie cinematiche 1.5 Catene cinematiche e meccanismi Meccanica Applicata alle Macchine
Cap. 1 - STRUTTURA DELLE MACCHINE 1.1 Oggetto dello studio 1.2 La macchina come sistema 1.3 Studio delle macchine 1.4 Coppie cinematiche 1.5 Catene cinematiche e meccanismi Meccanica Applicata alle Macchine
2. Giovedì 5/03/2015, 11 13. ore: 2(4) Spazi vettoriali euclidei. Vettori nello spazio fisico: Prodotto scalare e prodotto
 Spazi vettoriali euclidei. Vettori nello spazio fisico: Prodotto scalare e prodotto") Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2014/2015 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2015 1. Lunedì 2/03/2015, 11 13. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2014/2015 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2015 1. Lunedì 2/03/2015, 11 13. ore: 2(2) Presentazione
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
1 Introduzione alla Meccanica Razionale 1 1.1 Che cos è la Meccanica Razionale... 1 1.2 Un esempio... 2
 Indice 1 Introduzione alla Meccanica Razionale 1 1.1 Che cos è la Meccanica Razionale..................... 1 1.2 Un esempio................................. 2 2 Spazi Vettoriali, Spazio e Tempo 7 2.1 Cos
Indice 1 Introduzione alla Meccanica Razionale 1 1.1 Che cos è la Meccanica Razionale..................... 1 1.2 Un esempio................................. 2 2 Spazi Vettoriali, Spazio e Tempo 7 2.1 Cos
Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo.
 Introduzione Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo. riassunto Cosa determina il moto? Forza - Spinta di un
Introduzione Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo. riassunto Cosa determina il moto? Forza - Spinta di un
Programmazione modulare a.s. 2015-2016 Disciplina: Meccanica
 Programmazione modulare a.s. 2015-2016 Disciplina: Meccanica Classe: 5 Meccanica Docente prof. Angelo Rinaldi Ore settimanali previste: 4 ore ro totale di ore 4x33=132 ore Libro di testo Corso di Meccanica
Programmazione modulare a.s. 2015-2016 Disciplina: Meccanica Classe: 5 Meccanica Docente prof. Angelo Rinaldi Ore settimanali previste: 4 ore ro totale di ore 4x33=132 ore Libro di testo Corso di Meccanica
Corso di Laurea: Insegnamento: Docente: Cinematica. Vincoli e gradi di libertà
 Vincoli e gradi di libertà Coppie cinematiche Meccanismi Equazioni di struttura del moto rigido piano Vincoli e gradi di libertà La principale caratteristica dei sistemi meccanici è quella di essere costituiti
Vincoli e gradi di libertà Coppie cinematiche Meccanismi Equazioni di struttura del moto rigido piano Vincoli e gradi di libertà La principale caratteristica dei sistemi meccanici è quella di essere costituiti
Tema 1. Figura 1-a Schema a blocchi dell utilizzatore. Figura 1-b Profilo della camma UTILIZZATORE
 Esami di Stato per l abilitazione all esercizio della professione di Ingegnere I Sessione 21 Sezione A Vecchio Ordinamento Prova scritta - Settore INDUSTRIALE Tema 1 L albero d ingresso di una macchina
Esami di Stato per l abilitazione all esercizio della professione di Ingegnere I Sessione 21 Sezione A Vecchio Ordinamento Prova scritta - Settore INDUSTRIALE Tema 1 L albero d ingresso di una macchina
1. calcolare l accelerazione del sistema e stabilire se la ruota sale o scende [6 punti];
![1. calcolare l accelerazione del sistema e stabilire se la ruota sale o scende [6 punti];](/thumbs/24/2314490.jpg "1. calcolare l accelerazione del sistema e stabilire se la ruota sale o scende [6 punti];") 1 Esercizio Una ruota di raggio R = 15 cm e di massa M = 8 Kg può rotolare senza strisciare lungo un piano inclinato di un angolo θ 2 = 30 0, ed è collegato tramite un filo inestensibile ad un blocco di
1 Esercizio Una ruota di raggio R = 15 cm e di massa M = 8 Kg può rotolare senza strisciare lungo un piano inclinato di un angolo θ 2 = 30 0, ed è collegato tramite un filo inestensibile ad un blocco di
DISEGNO TECNICO INDUSTRIALE
 DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile
 Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2015-2016 A. Ponno (aggiornato al 19 gennaio 2016) 2 Ottobre 2015 5/10/15 Benvenuto, presentazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2015-2016 A. Ponno (aggiornato al 19 gennaio 2016) 2 Ottobre 2015 5/10/15 Benvenuto, presentazione
Meccanica applicata alle macchine. Laurea Triennale in Ingegneria Industriale. Livello e corso di studio ING-IND/13
 Insegnamento Livello e corso di studio Settore scientifico disciplinare (SSD) Meccanica applicata alle macchine Laurea Triennale in Ingegneria Industriale ING-IND/13 Anno di corso 2 Numero totale di crediti
Insegnamento Livello e corso di studio Settore scientifico disciplinare (SSD) Meccanica applicata alle macchine Laurea Triennale in Ingegneria Industriale ING-IND/13 Anno di corso 2 Numero totale di crediti
SISTEMI VINCOLATI. 1. Punto fisso: il vincolo impedisce ogni spostamento del punto.
 SISTEMI VINCOLATI Definizione 1 Si dice vincolo una qualunque condizione imposta ad un sistema materiale che impedisce di assumere una generica posizione e/o atto di moto. La presenza di un vincolo di
SISTEMI VINCOLATI Definizione 1 Si dice vincolo una qualunque condizione imposta ad un sistema materiale che impedisce di assumere una generica posizione e/o atto di moto. La presenza di un vincolo di
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica. http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
7 Applicazioni ulteriori
 7 Applicazioni ulteriori 7 Applicazioni ulteriori 7.1 Strutture con maglie chiuse 7.1.1 Analisi cinematica Si consideri la struttura in figura 7.1: i gradi di libertà sono pari a l =3n c v =3 0 3 = 0,
7 Applicazioni ulteriori 7 Applicazioni ulteriori 7.1 Strutture con maglie chiuse 7.1.1 Analisi cinematica Si consideri la struttura in figura 7.1: i gradi di libertà sono pari a l =3n c v =3 0 3 = 0,
Disegno di Macchine. Lezione n 7 Componentistica di base: alberi. corso per I anno della laurea in ing. meccanica Docente: ing.
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 7 Componentistica di base: alberi Introduzione ai componenti di macchine I componenti meccanici
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 7 Componentistica di base: alberi Introduzione ai componenti di macchine I componenti meccanici
FISICA DELLA BICICLETTA
 FISICA DELLA BICICLETTA Con immagini scelte dalla 3 SB PREMESSA: LEGGI FISICHE Velocità periferica (tangenziale) del moto circolare uniforme : v = 2πr / T = 2πrf Velocità angolare: ω = θ / t ; per un giro
FISICA DELLA BICICLETTA Con immagini scelte dalla 3 SB PREMESSA: LEGGI FISICHE Velocità periferica (tangenziale) del moto circolare uniforme : v = 2πr / T = 2πrf Velocità angolare: ω = θ / t ; per un giro
F 2 F 1. r R F A. fig.1. fig.2
 N.1 Un cilindro di raggio R = 10 cm e massa M = 5 kg è posto su un piano orizzontale scabro (fig.1). In corrispondenza del centro del cilindro è scavata una sottilissima fenditura in modo tale da ridurre
N.1 Un cilindro di raggio R = 10 cm e massa M = 5 kg è posto su un piano orizzontale scabro (fig.1). In corrispondenza del centro del cilindro è scavata una sottilissima fenditura in modo tale da ridurre
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
Note a cura di M. Martellini e M. Zeni
 Università dell Insubria Corso di laurea Scienze Ambientali FISICA GENERALE Lezione 6 Energia e Lavoro Note a cura di M. Martellini e M. Zeni Queste note sono state in parte preparate con immagini tratte
Università dell Insubria Corso di laurea Scienze Ambientali FISICA GENERALE Lezione 6 Energia e Lavoro Note a cura di M. Martellini e M. Zeni Queste note sono state in parte preparate con immagini tratte
BILANCIAMENTO. 8-1 Bilanciamento statico di un rotore
 8 BILANCIAMENTO Come si è visto al capitolo 7-3.3, quando il baricentro di un rotore non coincide con l asse di rotazione possono insorgere fenomeni vibratori di entità rilevante, talvolta tali, in condizioni
8 BILANCIAMENTO Come si è visto al capitolo 7-3.3, quando il baricentro di un rotore non coincide con l asse di rotazione possono insorgere fenomeni vibratori di entità rilevante, talvolta tali, in condizioni
PIANO DI LAVORO. ISTITUTO TECNICO INDUSTRIALE Leonardo da Vinci con sez. Commerciale annessa BORGOMANERO (NO) Anno Scolastico 2015 2016
 Anno Scolastico 2015 2016") pag. 1 di 5 ISTITUTO TECNICO INDUSTRIALE Leonardo da Vinci con sez. Commerciale annessa BORGOMANERO (NO) PIANO DI LAVORO Anno Scolastico 2015 2016 Materia: Meccanica Macchine ed Energia Classe: V^ Mecc.
pag. 1 di 5 ISTITUTO TECNICO INDUSTRIALE Leonardo da Vinci con sez. Commerciale annessa BORGOMANERO (NO) PIANO DI LAVORO Anno Scolastico 2015 2016 Materia: Meccanica Macchine ed Energia Classe: V^ Mecc.
CORSO DI IMPIANTI DI PROPULSIONE NAVALE
 ACCADEMIA NAVALE 1 ANNO CORSO APPLICATIVO GENIO NAVALE CORSO DI IMPIANTI DI PROPULSIONE NAVALE Lezione 09 Motori diesel lenti a due tempi A.A. 2011 /2012 Prof. Flavio Balsamo Nel motore a due tempi l intero
ACCADEMIA NAVALE 1 ANNO CORSO APPLICATIVO GENIO NAVALE CORSO DI IMPIANTI DI PROPULSIONE NAVALE Lezione 09 Motori diesel lenti a due tempi A.A. 2011 /2012 Prof. Flavio Balsamo Nel motore a due tempi l intero
DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA. Dinamica: studio delle forze che causano il moto dei corpi
 DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA Dinamica: studio delle forze che causano il moto dei corpi 1 Forza Si definisce forza una qualunque causa esterna che produce una variazione dello stato
DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA Dinamica: studio delle forze che causano il moto dei corpi 1 Forza Si definisce forza una qualunque causa esterna che produce una variazione dello stato
. Si determina quindi quale distanza viene percorsa lungo l asse y in questo intervallo di tempo: h = v 0y ( d
 Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
CS. Cinematica dei sistemi
 CS. Cinematica dei sistemi Dopo aver esaminato la cinematica del punto e del corpo rigido, che sono gli schemi più semplificati con cui si possa rappresentare un corpo, ci occupiamo ora dei sistemi vincolati.
CS. Cinematica dei sistemi Dopo aver esaminato la cinematica del punto e del corpo rigido, che sono gli schemi più semplificati con cui si possa rappresentare un corpo, ci occupiamo ora dei sistemi vincolati.
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Disegno di Macchine. corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 4 Componentistica di base: alberi, trasmissione per cinghie e catene, giunti Alberi Appunti
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 4 Componentistica di base: alberi, trasmissione per cinghie e catene, giunti Alberi Appunti
GIRO DELLA MORTE PER UN CORPO CHE ROTOLA
 0. IL OETO D IERZIA GIRO DELLA ORTE ER U CORO CHE ROTOLA ell approfondimento «Giro della morte per un corpo che scivola» si esamina il comportamento di un punto materiale che supera il giro della morte
0. IL OETO D IERZIA GIRO DELLA ORTE ER U CORO CHE ROTOLA ell approfondimento «Giro della morte per un corpo che scivola» si esamina il comportamento di un punto materiale che supera il giro della morte
BIOMECCANICA A A 2 0 11-2 0 1 2. P r o f. s s a M a r i a G u e r r i s i D o t t. P i e t r o P i c e r n o
 A A 2 0 11-2 0 1 2 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 11-2 0 1 2 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 1 2-2 0 1 3 BIOMECCANICA. P i e t r o P i c e r n o, P h D
 A A 2 0 1 2-2 0 1 3 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 1 2-2 0 1 3 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
Modulo di Meccanica e Termodinamica
 Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
COME SI RISOLVE UN PROBLEMA DI DINAMICA ROTAZIONALE (punto materiale ovvero corpo puntiforme )
") COME SI RISOLVE UN PROBLEMA DI DINAMICA ROTAZIONALE (punto materiale ovvero corpo puntiforme ) 1. Caso dell'osservatore inerziale: l'analisi del problema procede in modo analogo a quanto fatto per la dinamica
COME SI RISOLVE UN PROBLEMA DI DINAMICA ROTAZIONALE (punto materiale ovvero corpo puntiforme ) 1. Caso dell'osservatore inerziale: l'analisi del problema procede in modo analogo a quanto fatto per la dinamica
Funzioni. Il concetto di funzione nasce da quello di corrispondenza fra grandezze. Tale corrispondenza può essere data in svariati modi:
 Funzioni Il concetto di funzione nasce da quello di corrispondenza fra grandezze. Tale corrispondenza può essere data in svariati modi: da un rilevamento empirico da una formula (legge) ESEMPI: 1. la temperatura
Funzioni Il concetto di funzione nasce da quello di corrispondenza fra grandezze. Tale corrispondenza può essere data in svariati modi: da un rilevamento empirico da una formula (legge) ESEMPI: 1. la temperatura
Energia e Lavoro. In pratica, si determina la dipendenza dallo spazio invece che dal tempo
 Energia e Lavoro Finora abbiamo descritto il moto dei corpi (puntiformi) usando le leggi di Newton, tramite le forze; abbiamo scritto l equazione del moto, determinato spostamento e velocità in funzione
Energia e Lavoro Finora abbiamo descritto il moto dei corpi (puntiformi) usando le leggi di Newton, tramite le forze; abbiamo scritto l equazione del moto, determinato spostamento e velocità in funzione
CORSO DI LAUREA IN FISICA ANNO ACCADEMICO 2013-14 PROVA DI INGRESSO
 CORSO DI LAUREA IN FISICA ANNO ACCADEMICO 2013-14 PROVA DI INGRESSO 20 Settembre 2013 Fisica 1. La figura è una vista dall alto di quattro scatole identiche, S 1, S 2, S 3, S 4, appoggiate su un piano
CORSO DI LAUREA IN FISICA ANNO ACCADEMICO 2013-14 PROVA DI INGRESSO 20 Settembre 2013 Fisica 1. La figura è una vista dall alto di quattro scatole identiche, S 1, S 2, S 3, S 4, appoggiate su un piano
F S V F? Soluzione. Durante la spinta, F S =ma (I legge di Newton) con m=40 Kg.
 con m=40 Kg.") Spingete per 4 secondi una slitta dove si trova seduta la vostra sorellina. Il peso di slitta+sorella è di 40 kg. La spinta che applicate F S è in modulo pari a 60 Newton. La slitta inizialmente è ferma,
Spingete per 4 secondi una slitta dove si trova seduta la vostra sorellina. Il peso di slitta+sorella è di 40 kg. La spinta che applicate F S è in modulo pari a 60 Newton. La slitta inizialmente è ferma,
Progetto Pilota Valutazione della scuola italiana. Anno Scolastico 2002 2003 PROVA DI MATEMATICA. Scuola Secondaria Superiore.
 Gruppo di lavoro per la predisposizione degli indirizzi per l attuazione delle disposizioni concernenti la valutazione del servizio scolastico Progetto Pilota Valutazione della scuola italiana Anno Scolastico
Gruppo di lavoro per la predisposizione degli indirizzi per l attuazione delle disposizioni concernenti la valutazione del servizio scolastico Progetto Pilota Valutazione della scuola italiana Anno Scolastico
Esercizi sui Compressori e Ventilatori
 Esercizi sui Compressori e Ventilatori 27 COMPRESSORE VOLUMETRICO (Appello del 08.06.1998, esercizio N 2) Testo Un compressore alternativo monocilindrico di cilindrata V c = 100 cm 3 e volume nocivo V
Esercizi sui Compressori e Ventilatori 27 COMPRESSORE VOLUMETRICO (Appello del 08.06.1998, esercizio N 2) Testo Un compressore alternativo monocilindrico di cilindrata V c = 100 cm 3 e volume nocivo V
Il potenziale a distanza r da una carica puntiforme è dato da V = kq/r, quindi è sufficiente calcolare V sx dovuto alla carica a sinistra:
 1. Esercizio Calcolare il potenziale elettrico nel punto A sull asse di simmetria della distribuzione di cariche in figura. Quanto lavoro bisogna spendere per portare una carica da 2 µc dall infinito al
1. Esercizio Calcolare il potenziale elettrico nel punto A sull asse di simmetria della distribuzione di cariche in figura. Quanto lavoro bisogna spendere per portare una carica da 2 µc dall infinito al
Introduzione ai Motori a Combustione Interna
 IPS Mario Carrara Guastalla (RE) Tecnologie e Tecniche di Installazione e Manutenzione Docente: Prof. Matteo Panciroli Introduzione ai Motori a Combustione Interna 1 Classificazione delle macchine MACCHINE
IPS Mario Carrara Guastalla (RE) Tecnologie e Tecniche di Installazione e Manutenzione Docente: Prof. Matteo Panciroli Introduzione ai Motori a Combustione Interna 1 Classificazione delle macchine MACCHINE
Il fotone. Emanuele Pugliese, Lorenzo Santi URDF Udine
 Il fotone Emanuele Pugliese, Lorenzo Santi URDF Udine Interpretazione di Einstein dell effetto fotoelettrico Esistono «particelle»* di luce: i fotoni! La luce è composta da quantità indivisibili di energia
Il fotone Emanuele Pugliese, Lorenzo Santi URDF Udine Interpretazione di Einstein dell effetto fotoelettrico Esistono «particelle»* di luce: i fotoni! La luce è composta da quantità indivisibili di energia
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Test di autovalutazione Corso di Laurea in Tossicologia dell ambiente e degli alimenti
 Test di autovalutazione Corso di Laurea in Tossicologia dell ambiente e degli alimenti Quesito 1 Un punto materiale di massa 5 kg si muove di moto circolare uniforme con velocità tangenziale 1 m/s. Quanto
Test di autovalutazione Corso di Laurea in Tossicologia dell ambiente e degli alimenti Quesito 1 Un punto materiale di massa 5 kg si muove di moto circolare uniforme con velocità tangenziale 1 m/s. Quanto
1. CLASSIFICAZIONE DELLE MACCHINE
 1. CLASSIFICAZIONE DELLE MACCHINE Si definisce macchina un insieme di organi meccanici, fissi e mobili, collegati tra loro in maniera cinematicamente definita, dei quali almeno uno è in movimento soggetto
1. CLASSIFICAZIONE DELLE MACCHINE Si definisce macchina un insieme di organi meccanici, fissi e mobili, collegati tra loro in maniera cinematicamente definita, dei quali almeno uno è in movimento soggetto
PROGRAMMAZIONE DIDATTICA
 Pagina 1 di 5 DIPARTIMENTO DI MATEMATICA E FISICA MATERIA: FISICA CLASSE: 2ª D SCIENTIFICO DOCENTE: VICARI GIOVANNI PROFILO CLASSE INGRESSO USCITA LA CLASSE HA MOSTRATO, COME GIÀ LO SCORSO ANNO, UN ATTEGIAMENTO
Pagina 1 di 5 DIPARTIMENTO DI MATEMATICA E FISICA MATERIA: FISICA CLASSE: 2ª D SCIENTIFICO DOCENTE: VICARI GIOVANNI PROFILO CLASSE INGRESSO USCITA LA CLASSE HA MOSTRATO, COME GIÀ LO SCORSO ANNO, UN ATTEGIAMENTO
2 R = mgr + 1 2 mv2 0 = E f
 Esercizio 1 Un corpo puntiforme di massa m scivola lungo la pista liscia di raggio R partendo da fermo da un altezza h rispetto al fondo della pista come rappresentato in figura. Calcolare: a) Il valore
Esercizio 1 Un corpo puntiforme di massa m scivola lungo la pista liscia di raggio R partendo da fermo da un altezza h rispetto al fondo della pista come rappresentato in figura. Calcolare: a) Il valore
l insieme Y è detto codominio (è l insieme di tutti i valori che la funzione può assumere)
") Che cos è una funzione? Assegnati due insiemi X e Y si ha una funzione elemento di X uno e un solo elemento di Y. f : X Y se esiste una corrispondenza che associa ad ogni Osservazioni: l insieme X è detto
Che cos è una funzione? Assegnati due insiemi X e Y si ha una funzione elemento di X uno e un solo elemento di Y. f : X Y se esiste una corrispondenza che associa ad ogni Osservazioni: l insieme X è detto
Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012
 Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012 Problema 1 Due carrelli A e B, di massa m A = 104 kg e m B = 128 kg, collegati da una molla di costante elastica k = 3100
Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012 Problema 1 Due carrelli A e B, di massa m A = 104 kg e m B = 128 kg, collegati da una molla di costante elastica k = 3100
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Quantità di moto. Per un corpo puntiforme possiamo definire la grandezza vettoriale quantità di moto come il prodotto m v.
 Quantità di moto Per un corpo puntiforme possiamo definire la grandezza vettoriale quantità di moto come il prodotto m v. La seconda legge di Newton può essere scritta con la quantità di moto: d Q F =
Quantità di moto Per un corpo puntiforme possiamo definire la grandezza vettoriale quantità di moto come il prodotto m v. La seconda legge di Newton può essere scritta con la quantità di moto: d Q F =
1) IL MOMENTO DI UNA FORZA
 IL MOMENTO DI UNA FORZA") 1) IL MOMENTO DI UNA FORZA Nell ambito dello studio dei sistemi di forze, diamo una definizione di momento: il momento è un ente statico che provoca la rotazione dei corpi. Le forze producono momenti se
1) IL MOMENTO DI UNA FORZA Nell ambito dello studio dei sistemi di forze, diamo una definizione di momento: il momento è un ente statico che provoca la rotazione dei corpi. Le forze producono momenti se
RUOTE DENTATE CILINDRICHE A DENTI DIRITTI E CREMAGLIERE
 RUOTE DENTATE CILINDRICHE A DENTI DIRITTI E CREMAGLIERE Gli ingranaggi cilindrici e le cremagliere sono gli elementi classici per la trasmissione meccanica dei movimenti di rotazione e di traslazione tra
RUOTE DENTATE CILINDRICHE A DENTI DIRITTI E CREMAGLIERE Gli ingranaggi cilindrici e le cremagliere sono gli elementi classici per la trasmissione meccanica dei movimenti di rotazione e di traslazione tra
Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA
 Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA turbine eoliche ad asse verticale VAWT A.A. 2008/09 Energie Alternative Prof.B.Fortunato
Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA turbine eoliche ad asse verticale VAWT A.A. 2008/09 Energie Alternative Prof.B.Fortunato
Definizione Statico-Cinematica dei vincoli interni
 Definizione Statico-Cinematica dei vincoi interni Esempi deo schema strutturae di una struttura in cemento armato e di due strutture in acciaio in cui sono presenti dei vincoi interni cerniera. Vincoo
Definizione Statico-Cinematica dei vincoi interni Esempi deo schema strutturae di una struttura in cemento armato e di due strutture in acciaio in cui sono presenti dei vincoi interni cerniera. Vincoo
MATERIA MECCANICA-MACCHINE ENERGIA MODULO 1. (IL PROBLEMA ENERGETICO) MODULO 2. (IDROSTATICA)
 MODULO 2. (IDROSTATICA)") Anno scolastico: 2014-2015 Classe: 3AME MATERIA MECCANICA-MACCHINE ENERGIA Insegnante prof.ssa Maria Cristina Giacinti Insegnante Compresente: prof. Tommasini Lorenzo DIPARTIMENTO DI MECCANICA PROGRAMMAZIONE
Anno scolastico: 2014-2015 Classe: 3AME MATERIA MECCANICA-MACCHINE ENERGIA Insegnante prof.ssa Maria Cristina Giacinti Insegnante Compresente: prof. Tommasini Lorenzo DIPARTIMENTO DI MECCANICA PROGRAMMAZIONE
Campo elettrico per una carica puntiforme
 Campo elettrico per una carica puntiforme 1 Linee di Campo elettrico A. Pastore Fisica con Elementi di Matematica (O-Z) 2 Esercizio Siano date tre cariche puntiformi positive uguali, fisse nei vertici
Campo elettrico per una carica puntiforme 1 Linee di Campo elettrico A. Pastore Fisica con Elementi di Matematica (O-Z) 2 Esercizio Siano date tre cariche puntiformi positive uguali, fisse nei vertici
CLASSE PRIMA A. I..I.S. via Silvestri,301 Plesso A.Volta Programma di Fisica e Laboratorio Programma Attività Didattiche svolte A.S.
 CLASSE PRIMA A I..I.S. via Silvestri,301 Plesso A.Volta Programma di Fisica e Laboratorio Programma Attività Didattiche svolte Materia A.S.2014/2015 FISICA e Laboratorio di Fisica Unità 2- Strumenti matematici:
CLASSE PRIMA A I..I.S. via Silvestri,301 Plesso A.Volta Programma di Fisica e Laboratorio Programma Attività Didattiche svolte Materia A.S.2014/2015 FISICA e Laboratorio di Fisica Unità 2- Strumenti matematici:
LICEO SCIENTIFICO STATALE MARIE CURIE Savignano s. R. (FC) CLASSE 3C ESERCIZI SU MOMENTO ANGOLARE-ROTOLAMENTO. Esercizio.
 CLASSE 3C ESERCIZI SU MOMENTO ANGOLARE-ROTOLAMENTO. Esercizio.") LICEO SCIENTIFICO STATALE MARIE CURIE Savignano s. R. (FC) CLASSE 3C ESERCIZI SU MOMENTO ANGOLARE-ROTOLAMENTO Esercizio Esercizio Esercizio Dati esercizio: I 1 =5,0 Kg m 2 I 2 =10 Kg m 2 ω i =10giri/sec
LICEO SCIENTIFICO STATALE MARIE CURIE Savignano s. R. (FC) CLASSE 3C ESERCIZI SU MOMENTO ANGOLARE-ROTOLAMENTO Esercizio Esercizio Esercizio Dati esercizio: I 1 =5,0 Kg m 2 I 2 =10 Kg m 2 ω i =10giri/sec
Lezione 10: Il problema del consumatore: Preferenze e scelta ottimale
 Corso di Scienza Economica (Economia Politica) prof. G. Di Bartolomeo Lezione 10: Il problema del consumatore: Preferenze e scelta ottimale Facoltà di Scienze della Comunicazione Università di Teramo Scelta
Corso di Scienza Economica (Economia Politica) prof. G. Di Bartolomeo Lezione 10: Il problema del consumatore: Preferenze e scelta ottimale Facoltà di Scienze della Comunicazione Università di Teramo Scelta
Forze Conservative. Il lavoro eseguito da una forza conservativa lungo un qualunque percorso chiuso e nullo.
 Lavoro ed energia 1. Forze conservative 2. Energia potenziale 3. Conservazione dell energia meccanica 4. Conservazione dell energia nel moto del pendolo 5. Esempio: energia potenziale gravitazionale 6.
Lavoro ed energia 1. Forze conservative 2. Energia potenziale 3. Conservazione dell energia meccanica 4. Conservazione dell energia nel moto del pendolo 5. Esempio: energia potenziale gravitazionale 6.
LE TORRI: DISCOVERY e COLUMBIA
 LE TORRI: DISCOVERY e COLUMBIA Osservazioni e misure a bordo Le tue sensazioni e l accelerometro a molla 1) Nelle due posizioni indicate dalle frecce indica le sensazioni ricevute rispetto al tuo peso
LE TORRI: DISCOVERY e COLUMBIA Osservazioni e misure a bordo Le tue sensazioni e l accelerometro a molla 1) Nelle due posizioni indicate dalle frecce indica le sensazioni ricevute rispetto al tuo peso
ESERCIZI CINEMATICA IN UNA DIMENSIONE
 ESERCIZI CINEMATICA IN UNA DIMENSIONE ES. 1 - Due treni partono da due stazioni distanti 20 km dirigendosi uno verso l altro rispettivamente alla velocità costante di v! = 50,00 km/h e v 2 = 100,00 km
ESERCIZI CINEMATICA IN UNA DIMENSIONE ES. 1 - Due treni partono da due stazioni distanti 20 km dirigendosi uno verso l altro rispettivamente alla velocità costante di v! = 50,00 km/h e v 2 = 100,00 km
a t Esercizio (tratto dal problema 5.10 del Mazzoldi)
") 1 Esercizio (tratto dal problema 5.10 del Mazzoldi) Una guida semicircolare liscia verticale di raggio = 40 cm è vincolata ad una piattaforma orizzontale che si muove con accelerazione costante a t = 2
1 Esercizio (tratto dal problema 5.10 del Mazzoldi) Una guida semicircolare liscia verticale di raggio = 40 cm è vincolata ad una piattaforma orizzontale che si muove con accelerazione costante a t = 2
Nome..Cognome.. Classe 4G 4 dicembre 2008. VERIFICA DI FISICA: lavoro ed energia
 Nome..Cognome.. Classe 4G 4 dicembre 8 VERIFIC DI FISIC: lavoro ed energia Domande ) Energia cinetica: (punti:.5) a) fornisci la definizione più generale possibile di energia cinetica, specificando l equazione
Nome..Cognome.. Classe 4G 4 dicembre 8 VERIFIC DI FISIC: lavoro ed energia Domande ) Energia cinetica: (punti:.5) a) fornisci la definizione più generale possibile di energia cinetica, specificando l equazione
QUESITO 1 A FISICA. Il candidato illustri il primo principio della termodinamica. Consideri poi la seguente
 QUESITO 1 A Il candidato illustri il primo principio della termodinamica. Consideri poi la seguente circostanza: nel cilindro di un motore avviene una rapida espansione di un gas contro il pistone. Il
QUESITO 1 A Il candidato illustri il primo principio della termodinamica. Consideri poi la seguente circostanza: nel cilindro di un motore avviene una rapida espansione di un gas contro il pistone. Il
APPUNTI SUL CAMPO MAGNETICO ROTANTE
 APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA MECCANICA PROGETTAZIONE ASSISTITA DA COMPUTER I PROVA DI ESAME DEL / / ALLIEVO MATRICOLA
 CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA MECCANICA PROGETTAZIONE ASSISTITA DA COMPUTER I PROVA DI ESAME DEL / / ALLIEVO MATRICOLA Data la MOLLA CONICA mostrata in Figura, proporre uno schema di elaborazione
CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA MECCANICA PROGETTAZIONE ASSISTITA DA COMPUTER I PROVA DI ESAME DEL / / ALLIEVO MATRICOLA Data la MOLLA CONICA mostrata in Figura, proporre uno schema di elaborazione
19 Il campo elettrico - 3. Le linee del campo elettrico
 Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
Problemi di dinamica del punto materiale (moto oscillatorio) A Sistemi di riferimento inerziali
 A Sistemi di riferimento inerziali") Problemi di dinamica del punto materiale (moto oscillatorio) A Sistemi di riferimento inerziali Problema n. 1: Un corpo puntiforme di massa m = 2.5 kg pende verticalmente dal soffitto di una stanza essendo
Problemi di dinamica del punto materiale (moto oscillatorio) A Sistemi di riferimento inerziali Problema n. 1: Un corpo puntiforme di massa m = 2.5 kg pende verticalmente dal soffitto di una stanza essendo
La propulsione Informazioni per il PD
 Informazioni per il PD 1/10 Compito Come funziona un automobile? Gli alunni studiano i diversi tipi di propulsione (motore) dell auto e imparano qual è la differenza tra un motore diesel e uno a benzina.
Informazioni per il PD 1/10 Compito Come funziona un automobile? Gli alunni studiano i diversi tipi di propulsione (motore) dell auto e imparano qual è la differenza tra un motore diesel e uno a benzina.
Dimensionamento di un azionamento di avanzamento
 Dimensionamento di un azionamento di avanzamento Saranno forniti i criteri per la scelta dei servomotori e dei principali componenti meccanici di un azionamento di avanzamento. dimensionamento stazionario
Dimensionamento di un azionamento di avanzamento Saranno forniti i criteri per la scelta dei servomotori e dei principali componenti meccanici di un azionamento di avanzamento. dimensionamento stazionario
GIRO DELLA MORTE PER UN CORPO CHE SCIVOLA
 8. LA CONSERVAZIONE DELL ENERGIA MECCANICA IL LAVORO E L ENERGIA 4 GIRO DELLA MORTE PER UN CORPO CHE SCIVOLA Il «giro della morte» è una delle parti più eccitanti di una corsa sulle montagne russe. Per
8. LA CONSERVAZIONE DELL ENERGIA MECCANICA IL LAVORO E L ENERGIA 4 GIRO DELLA MORTE PER UN CORPO CHE SCIVOLA Il «giro della morte» è una delle parti più eccitanti di una corsa sulle montagne russe. Per
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
CONSERVAZIONE DELL ENERGIA MECCANICA
 CONSERVAZIONE DELL ENERGIA MECCANICA L introduzione dell energia potenziale e dell energia cinetica ci permette di formulare un principio potente e universale applicabile alla soluzione dei problemi che
CONSERVAZIONE DELL ENERGIA MECCANICA L introduzione dell energia potenziale e dell energia cinetica ci permette di formulare un principio potente e universale applicabile alla soluzione dei problemi che
DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE
 DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE Per un corretto dimensionamento del martinetto a ricircolo di sfere è necessario operare come segue: definizione dei dati del dell applicazione (A)
DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE Per un corretto dimensionamento del martinetto a ricircolo di sfere è necessario operare come segue: definizione dei dati del dell applicazione (A)
percorso fatto sul tratto orizzontale). Determinare il lavoro (minimo) e la potenza minima del motore per percorrere un tratto.
. Determinare il lavoro (minimo) e la potenza minima del motore per percorrere un tratto.") Esercizio 1 Una pietra viene lanciata con una velocità iniziale di 20.0 m/s contro una pigna all'altezza di 5.0 m rispetto al punto di lancio. Trascurando ogni resistenza, calcolare la velocità della pietra
Esercizio 1 Una pietra viene lanciata con una velocità iniziale di 20.0 m/s contro una pigna all'altezza di 5.0 m rispetto al punto di lancio. Trascurando ogni resistenza, calcolare la velocità della pietra
Seconda Legge DINAMICA: F = ma
 Seconda Legge DINAMICA: F = ma (Le grandezze vettoriali sono indicate in grassetto e anche in arancione) Fisica con Elementi di Matematica 1 Unità di misura: Massa m si misura in kg, Accelerazione a si
Seconda Legge DINAMICA: F = ma (Le grandezze vettoriali sono indicate in grassetto e anche in arancione) Fisica con Elementi di Matematica 1 Unità di misura: Massa m si misura in kg, Accelerazione a si
bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo
 Momento di una forza Nella figura 1 è illustrato come forze uguali e contrarie possono non produrre equilibrio, bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo esteso.
Momento di una forza Nella figura 1 è illustrato come forze uguali e contrarie possono non produrre equilibrio, bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo esteso.
LA FORZA E IL MOTO: ISACC NEWTON UN RE SCONTROSO
 WebQuest Studentessa Guidi Elisabetta Corso Laurea Scienze Formazione Primaria Università di Urbino Carlo Bo LA FORZA E IL MOTO: ISACC NEWTON UN RE SCONTROSO 1) INTRODUZIONE Il 1642 è un anno storico per
WebQuest Studentessa Guidi Elisabetta Corso Laurea Scienze Formazione Primaria Università di Urbino Carlo Bo LA FORZA E IL MOTO: ISACC NEWTON UN RE SCONTROSO 1) INTRODUZIONE Il 1642 è un anno storico per
Lezione numero 7 28 Novembre 2000. Ruote dentate.
 Lezione numero 7 8 ovembre 000 Ruote dentate. Ruote dentate. La trasmissione da un albero ad un altro senza problemi legati ai rapporti di trasmissione è possibile sfruttando le ruote dentate, dette anche
Lezione numero 7 8 ovembre 000 Ruote dentate. Ruote dentate. La trasmissione da un albero ad un altro senza problemi legati ai rapporti di trasmissione è possibile sfruttando le ruote dentate, dette anche
Moto circolare uniforme
 Moto circolare uniforme 01 - Moto circolare uniforme. Il moto di un corpo che avviene su una traiettoria circolare (una circonferenza) con velocità (in modulo, intensità) costante si dice moto circolare
Moto circolare uniforme 01 - Moto circolare uniforme. Il moto di un corpo che avviene su una traiettoria circolare (una circonferenza) con velocità (in modulo, intensità) costante si dice moto circolare
POLITECNICO DI MILANO CORSO DI LAUREA ON LINE IN INGEGNERIA INFORMATICA ESAME DI FISICA
 1 POLITECNICO DI MILANO CORSO DI LAUREA ON LINE IN INGEGNERIA INFORMATICA ESAME DI FISICA Per ogni punto del programma d esame vengono qui di seguito indicate le pagine corrispondenti nel testo G. Tonzig,
1 POLITECNICO DI MILANO CORSO DI LAUREA ON LINE IN INGEGNERIA INFORMATICA ESAME DI FISICA Per ogni punto del programma d esame vengono qui di seguito indicate le pagine corrispondenti nel testo G. Tonzig,
ISTITUZIONE SCOLASTICA Via Tuscolana, 208 - Roma Sede associata Liceo-Ginnasio ''B.Russell" Verifica sommativa di Fisica
 ISTITUZIONE SCOLASTICA Via Tuscolana, 208 - Roma Sede associata Liceo-Ginnasio ''B.Russell" Verifica sommativa di Fisica Questionario a risposta multipla Prova di uscita di Fisica relativa al modulo DESCRIZIONE
ISTITUZIONE SCOLASTICA Via Tuscolana, 208 - Roma Sede associata Liceo-Ginnasio ''B.Russell" Verifica sommativa di Fisica Questionario a risposta multipla Prova di uscita di Fisica relativa al modulo DESCRIZIONE
Dinamica di un impianto ascensore
 Dinamica di un impianto ascensore rev. 1.2 L ascensore rappresentato schematicamente in figura è azionato da un motore elettrico tramite un riduttore ed una puleggia sulla quale si avvolge la fune di sollevamento.
Dinamica di un impianto ascensore rev. 1.2 L ascensore rappresentato schematicamente in figura è azionato da un motore elettrico tramite un riduttore ed una puleggia sulla quale si avvolge la fune di sollevamento.
MATEMATICA 2001. p = 4/6 = 2/3; q = 1-2/3 = 1/3. La risposta corretta è quindi la E).
.") MATEMATICA 2001 66. Quale fra le seguenti affermazioni è sbagliata? A) Tutte le funzioni ammettono la funzione inversa B) Una funzione dispari è simmetrica rispetto all origine C) Una funzione pari è simmetrica
MATEMATICA 2001 66. Quale fra le seguenti affermazioni è sbagliata? A) Tutte le funzioni ammettono la funzione inversa B) Una funzione dispari è simmetrica rispetto all origine C) Una funzione pari è simmetrica
TRASFORMAZIONI GEOMETRICHE NEL PIANO. Parte 1
 TRASFORMAZIONI GEOMETRICHE NEL PIANO Parte 1 La geometria è la scienza che studia la forma e l estensione dei corpi e le trasformazioni che questi possono subire. In generale per trasformazione geometrica
TRASFORMAZIONI GEOMETRICHE NEL PIANO Parte 1 La geometria è la scienza che studia la forma e l estensione dei corpi e le trasformazioni che questi possono subire. In generale per trasformazione geometrica
Esercitazione 5 Dinamica del punto materiale
 Problema 1 Un corpo puntiforme di massa m = 1.0 kg viene lanciato lungo la superficie di un cuneo avente un inclinazione θ = 40 rispetto all orizzontale e altezza h = 80 cm. Il corpo viene lanciato dal
Problema 1 Un corpo puntiforme di massa m = 1.0 kg viene lanciato lungo la superficie di un cuneo avente un inclinazione θ = 40 rispetto all orizzontale e altezza h = 80 cm. Il corpo viene lanciato dal
Aprile (recupero) tra una variazione di velocità e l intervallo di tempo in cui ha luogo.
 tra una variazione di velocità e l intervallo di tempo in cui ha luogo.") Febbraio 1. Un aereo in volo orizzontale, alla velocità costante di 360 km/h, lascia cadere delle provviste per un accampamento da un altezza di 200 metri. Determina a quale distanza dall accampamento
Febbraio 1. Un aereo in volo orizzontale, alla velocità costante di 360 km/h, lascia cadere delle provviste per un accampamento da un altezza di 200 metri. Determina a quale distanza dall accampamento
quale agisce una forza e viceversa. situazioni. applicate a due corpi che interagiscono. Determinare la forza centripeta di un
 CLASSE Seconda DISCIPLINA Fisica ORE SETTIMANALI 3 TIPO DI PROVA PER GIUDIZIO SOSPESO Test a risposta multipla MODULO U.D Conoscenze Abilità Competenze Enunciato del primo principio della Calcolare l accelerazione
CLASSE Seconda DISCIPLINA Fisica ORE SETTIMANALI 3 TIPO DI PROVA PER GIUDIZIO SOSPESO Test a risposta multipla MODULO U.D Conoscenze Abilità Competenze Enunciato del primo principio della Calcolare l accelerazione
CIRCUITI OLEODINAMICI ELEMENTARI
 CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
I.T.I.S. «G. MARCONI» - PADOVA Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277 e-mail: marconi@provincia.padova.it ww.itismarconipadova.
 PAG. 1/5 I.T.I.S. «G. MARCONI» - PADOVA Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277 e-mail: marconi@provincia.padova.it ww.itismarconipadova.it DIPARTIMANTO DI MECCANICA E MACCHINE A FLUIDO Rev.
PAG. 1/5 I.T.I.S. «G. MARCONI» - PADOVA Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277 e-mail: marconi@provincia.padova.it ww.itismarconipadova.it DIPARTIMANTO DI MECCANICA E MACCHINE A FLUIDO Rev.
Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 2011/2012
 Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 211/212 Ricordare: una funzione lipschitziana tra spazi metrici manda insiemi limitati in insiemi limitati; se il dominio di una funzione
Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 211/212 Ricordare: una funzione lipschitziana tra spazi metrici manda insiemi limitati in insiemi limitati; se il dominio di una funzione
Fasi del progetto geotecnico di una fondazione
 1 Fasi del progetto geotecnico di una fondazione 1. Indagini per la caratterizzazione geotecnica del sottosuolo. Analisi di entità e distribuzione delle azioni di progetto in esercizio (carichi fissi +
1 Fasi del progetto geotecnico di una fondazione 1. Indagini per la caratterizzazione geotecnica del sottosuolo. Analisi di entità e distribuzione delle azioni di progetto in esercizio (carichi fissi +
IL FORMULARIO DI FISICA PER LE CLASSI DI 3 E 4 LICEO SCIENTIFICO Di Pietro Aceti
 IL FORMULARIO DI FISICA PER LE CLASSI DI 3 E 4 LICEO SCIENTIFICO Di Pietro Aceti ATTENZIONE Quest opera è stata scritta con l intenzione di essere un comodo strumento di ripasso, essa non dà informazioni
IL FORMULARIO DI FISICA PER LE CLASSI DI 3 E 4 LICEO SCIENTIFICO Di Pietro Aceti ATTENZIONE Quest opera è stata scritta con l intenzione di essere un comodo strumento di ripasso, essa non dà informazioni
RUOTE DENTATE. Introduzione
 RUOTE DENTATE 362 Introduzione Le ruote dentate costituiscono un sistema affidabile per la trasmissione del moto tra assi paralleli, incidenti e sghembi. La trasmissione avviene per spinta dei denti della
RUOTE DENTATE 362 Introduzione Le ruote dentate costituiscono un sistema affidabile per la trasmissione del moto tra assi paralleli, incidenti e sghembi. La trasmissione avviene per spinta dei denti della
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
La propagazione delle onde luminose può essere studiata per mezzo delle equazioni di Maxwell. Tuttavia, nella maggior parte dei casi è possibile
 Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul