11^ parte : Come gestire i servomotori con Arduino. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
|
|
|
- Michelangelo Agnello Garofalo
- 8 anni fa
- Visualizzazioni
Transcript
1 11^ parte : Come gestire i servomotori con Arduino Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)


2 Un servomotore è un dispositivo capace di eseguire dei movimenti meccanici in funzione del segnale applicato al suo ingresso. Sono in pratica dei dispositivi di precisione che servono per gestire la posizione angolare di un disco rotante o di un braccio meccanico. Sostanzialmente un servo è composto da un motore elettrico, un motoriduttore ed un circuito di feedback per la gestione della posizione. In commercio, esiste una vasta scelta di servi, ciascuno caratterizzabile per valore di coppia e precisione. Quindi le caratteristiche comuni tra i servo sono principalmente, l angolo di rotazione, la velocità di rotazione e la coppia motrice. Il servo trattato in questo articolo è il B2232, un piccolo servo economico, ideale per i primi esperimenti didattici. Questo tipo di servo ha un angolo di rotazione di circa 180 (la rotazione effettiva è un pò inferiore), inoltre esistono altri tipi di servi che hanno una rotazione continua e, anzichè pilotarne la posizione, ne possiamo gestire la velocità.

3 Qualunque sia il servo scelto, ci troveremo davanti sempre 3 contatti di cui due sono di alimentazione (V+ e GND) mentre il terzo è il pin di controllo che nel nostro caso andrà collegato con un pin di arduino. Per il servo in questione (i colori sono differenti dalla foto) il filo rosso corrisponde a V+, il filo viola è il GND mentre il filo giallo è quello del segnale. Se vogliamo pilotare dei servo prima di tutto dobbiamo sapere che la complessità dell opera nasce dalla necessità di utilizzare un duty cycle per impartire comandi a questi meravigliosi oggetti in grado di trasformare la volontà elettronica in movimento. Arduino dispone, secondo i modelli, di uscite PWM ossia pin digitali in grado di generare un duty-cycle utilizzabile per far muovere un servo. Il modo più semplice per pilotare i servomotori è utilizzare una libreria, che traduca angoli in segnali e ci eviti di dover impazzire con i dutycycle e i calcoli dei tempi; la libreria in questione è la Servo spiegata molto dettagliatamente sulla pagina ufficiale presente sul sito ufficiale dell Arduino.

4 Questa classe ti mette a disposizione alcuni metodi che semplificano di molto l obiettivo: attach(): permette di specificare su quale pin è connesso il nostro servo e legarlo all oggetto Servo; attached(): controlla che un oggetto di tipo Servo sia collegata ad un pin; detach(): rimuove il collegamento tra l oggetto Servo e il pin a cui era legata; read(): legge la posizione angolare del nostro servo, restituisce l ultimo valore passato con write(); write(): impartisce al servo l angolo a cui posizionarsi, su servo a rotazione continua imposta la velocità di rotazione 0=velocità massima in un senso, 90=fermo, 180=velocià massima nella direzione inversa; writemicroseconds(): imposta la velocità di rotazione del servo, in un servo standard il valore va da 1000 a 2000, in un servo a rotazione continua si comporta allo stesso modo della write(). L uso di questa libreria è molto semplice, vediamo quest esempio preso direttamente dal sito.
: imposta la velocità di rotazione del servo, in un servo standard il valore va da 1000 a 2000, in un")
5 Esempio 1 In questo esempio vedremo il servomotore compiere una rotazione da 0 a 180 e viceversa. Incominciamo collegando il nostro servo come nella figura seguente:

6 E importante tenere conto che con la classe Servo possiamo utilizzare tutti i pin digitali e analogici di Arduino e non solo le uscite di tipo PWM, questo disabilita la funzione analogwrite() normalmente utilizzabile con le uscite PWM di Arduino.
 normalmente utilizzabile con le uscite PWM di")
7 #include <Servo.h> // include la Libreria Servo.h Servo myservo; // crea l oggetto di tipo Servo, myservo sarà l oggetto su cui opererai int pos = 0; // inizializza una variabile di tipo intero pos il cui valore sarà la posizione da impartire al servo void setup() { myservo.attach(8);// lega l oggetto myservo al pin a cui abbiamo collegato il nostro servo, in questo caso il pin 8 void loop() { for(pos = 0; pos < 180; pos += 1) // imposta un ciclo con valori che vanno da 0 a 180, // sarano i gradi di spostamento del nostro servo { myservo.write(pos); // con il metodo write() passi all oggetto myservo la posizione che deve raggiungere, // il servo si sposterà gradualmente dalla sua posizione 0 alla posizione 180 delay(15); // imposta un ritardo di 15 millesimi di secondo per ogni ciclo del for. // Più sarà alto il ritardo più il servo sarà lento. for(pos = 180; pos>=1; pos-=1) // In questo caso imposta un ciclo con valori che vanno da 180 a 0 { myservo.write(pos); delay(15);
;// lega l oggetto myservo al pin a cui abbiamo collegato il nostro servo, in questo caso il pin 8 void loop() { for(pos = 0; pos < 180; pos += 1) // imposta un ciclo con valori che vanno da")
8 Con l istruzioneservo myservo; dichiariamo un oggetto di tipo Servo, e lo chiamiamo myservo. Invece per indicare a quale pin è collegato l oggetto myservo usiamo la funzione attach(), di cui possiamo vedere la sintassi all interno del void setup(). Per pilotare il servo usiamo la funzione myservo.write(pos) dove con pos si indica la posizione in gradi. Dopo aver visto la sintassi vediamo un esempio pratico.

9 Esempio 2 Nel secondo esempio comanderemo la rotazione di un servomotore con un potenziometro o trimmer.

10
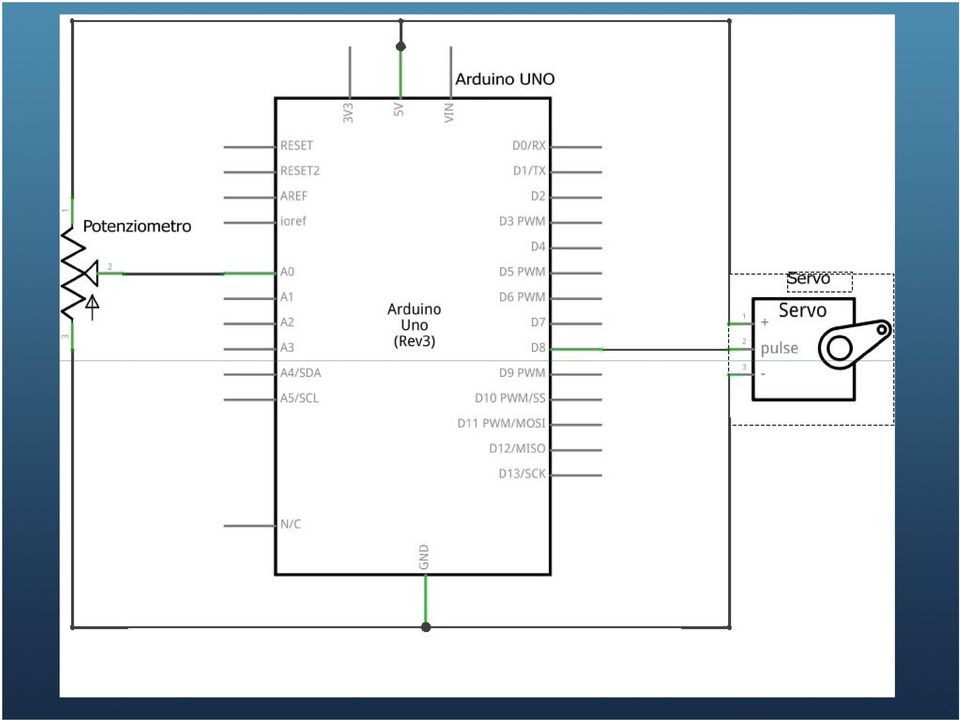
11 #include <Servo.h> // include la Libreria Servo.h Servo servomotor; // Crea l oggetto di tipo Servo, servomotor sarà l oggetto su cui opererai. int valore; // Inizializza una variabile di tipo intero "valore" il cui valore sarà la posizione da impartire al servo. void setup() { servomotor.attach(8); // Lega l oggetto servomotor al pin a cui abbiamo collegato il nostro servo, // in questo caso il pin 8. void loop() { valore = analogread(a0); // Legge il valore analogico del potenziometro sul pin A0 valore = map(valore, 0, 1023, 0, 180); // "Mappa" i valori di una lettura analogica (che vanno quindi da // 0 a 1023) a valori che vanno da 0 a 180. servomotor.write(valore); // con il metodo write() passi all oggetto servomotor la posizione che deve // raggiungere. delay(15);
 { valore = analogread(a0); // Legge il valore analogico del potenziometro sul pin A0 valore = map(valore, 0, 1023, 0, 180); // \"Mappa\" i valori di una lettura analogica (che vanno")
Progetto Esami Di Stato Anno 2014/2015
 Progetto Esami Di Stato Anno 2014/2015 Candidato: Ardilio Angelica Classe: 5 B - I.T.I.S. Elettronica ed Elettrotecnica. T.P.S.E.E. Tecnologia & Progettazione di Sistemi Elettrici ed Elettronici ARDUINO.
Progetto Esami Di Stato Anno 2014/2015 Candidato: Ardilio Angelica Classe: 5 B - I.T.I.S. Elettronica ed Elettrotecnica. T.P.S.E.E. Tecnologia & Progettazione di Sistemi Elettrici ed Elettronici ARDUINO.
8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N. Author: Ing. Sebastiano Giannitto (ITIS M.
 8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Come pilotare un motore passo passo usando l integrato L298N Nelle nostre
8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Come pilotare un motore passo passo usando l integrato L298N Nelle nostre
9^ parte : Come pilotare motori dc utilizzando il motor shield. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 9^ parte : Come pilotare motori dc utilizzando il motor shield Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) I motorini dc sono molto comuni nei vecchi giocatoli, possiamo recuperarli per
9^ parte : Come pilotare motori dc utilizzando il motor shield Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) I motorini dc sono molto comuni nei vecchi giocatoli, possiamo recuperarli per
8^ parte : Motor shield FE e motore passo-passo bipolare. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 8^ parte : Motor shield FE e motore passo-passo bipolare Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) 1 modo di gestione di un motore passo-passo bipolare // set pin numbers: const int a1
8^ parte : Motor shield FE e motore passo-passo bipolare Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) 1 modo di gestione di un motore passo-passo bipolare // set pin numbers: const int a1
7^ parte : Acquisizione della temperatura con LM35 e visualizzazione su display LCD. Author: Ing. Sebastiano Giannitto (ITIS M.
 7^ parte : Acquisizione della temperatura con LM35 e visualizzazione su display LCD Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 6 Lo scopo del progetto è realizzare un termometro
7^ parte : Acquisizione della temperatura con LM35 e visualizzazione su display LCD Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 6 Lo scopo del progetto è realizzare un termometro
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N. Author: Ing. Sebastiano Giannitto (ITIS M.
 8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Come pilotare un motore passo passo usando l integrato L298N Nelle nostre
8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Come pilotare un motore passo passo usando l integrato L298N Nelle nostre
Corso Base Arduino ed Elettronica
 Corso Base Arduino ed Elettronica Secondo incontro Saldatura e Relatore: Roberto Beligni rbeligni@altratecnoloiga.com L'ambiente di sviluppo L'ambiente di sviluppo di Arduino (Chiamato IDE) facilita la
Corso Base Arduino ed Elettronica Secondo incontro Saldatura e Relatore: Roberto Beligni rbeligni@altratecnoloiga.com L'ambiente di sviluppo L'ambiente di sviluppo di Arduino (Chiamato IDE) facilita la
Arduino: Programmazione
 Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Codifica: dal diagramma a blocchi al linguaggio C++
 Codifica: dal diagramma a blocchi al linguaggio C++ E necessario chiarire inizialmente alcuni concetti. La compilazione Il dispositivo del computer addetto all esecuzione dei programmi è la CPU La CPU
Codifica: dal diagramma a blocchi al linguaggio C++ E necessario chiarire inizialmente alcuni concetti. La compilazione Il dispositivo del computer addetto all esecuzione dei programmi è la CPU La CPU
Per scrivere una procedura che non deve restituire nessun valore e deve solo contenere le informazioni per le modalità delle porte e controlli
 CODICE Le fonti in cui si possono trovare tutorial o esempi di progetti utilizzati con Arduino si trovano nel sito ufficiale di Arduino, oppure nei forum di domotica e robotica. Il codice utilizzato per
CODICE Le fonti in cui si possono trovare tutorial o esempi di progetti utilizzati con Arduino si trovano nel sito ufficiale di Arduino, oppure nei forum di domotica e robotica. Il codice utilizzato per
NTC E MISURA DELLA TEMPERATURA CON ARDUINO
 NTC E MISURA DELLA TEMPERATURA CON ARDUINO Una NTC (Negative Temperature Coefficient resistenza a coefficiente di temperatura negativo) è una resistenza che cambia il suo valore con il variare della temperatura.
NTC E MISURA DELLA TEMPERATURA CON ARDUINO Una NTC (Negative Temperature Coefficient resistenza a coefficiente di temperatura negativo) è una resistenza che cambia il suo valore con il variare della temperatura.
come fare nas Configurare un NAS per accedere ai propri file ovunque
 come fare nas Configurare un NAS per accedere ai propri file ovunque O8 Configurare un NAS per accedere ai propri file ovunque È COMODO POTER ACCEDERE A DISTANZA, VIA INTERNET, AI PROPRI FILE, IN PARTICOLARE
come fare nas Configurare un NAS per accedere ai propri file ovunque O8 Configurare un NAS per accedere ai propri file ovunque È COMODO POTER ACCEDERE A DISTANZA, VIA INTERNET, AI PROPRI FILE, IN PARTICOLARE
Rossetto Flavio a.s. 2011/2012 classe 5E 2
 Rossetto Flavio a.s. 2011/2012 classe 5E 2 2 e 4 pag vuota Finalità-Obiettivo pag. 5 Situazione di partenza pag. 6 Prime operazioni pag. 7 Schema elettrico pag. 9 Circuito stampato pag 10 Elenco componenti
Rossetto Flavio a.s. 2011/2012 classe 5E 2 2 e 4 pag vuota Finalità-Obiettivo pag. 5 Situazione di partenza pag. 6 Prime operazioni pag. 7 Schema elettrico pag. 9 Circuito stampato pag 10 Elenco componenti
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Termodinamica. Sistema termodinamico. Piano di Clapeyron. Sistema termodinamico. Esempio. Cosa è la termodinamica? TERMODINAMICA
 Termodinamica TERMODINAMICA Cosa è la termodinamica? La termodinamica studia la conversione del calore in lavoro meccanico Prof Crosetto Silvio 2 Prof Crosetto Silvio Il motore dell automobile trasforma
Termodinamica TERMODINAMICA Cosa è la termodinamica? La termodinamica studia la conversione del calore in lavoro meccanico Prof Crosetto Silvio 2 Prof Crosetto Silvio Il motore dell automobile trasforma
INTRODUZIONE I CICLI DI BORSA
 www.previsioniborsa.net 1 lezione METODO CICLICO INTRODUZIONE Questo metodo e praticamente un riassunto in breve di anni di esperienza e di studi sull Analisi Tecnica di borsa con specializzazione in particolare
www.previsioniborsa.net 1 lezione METODO CICLICO INTRODUZIONE Questo metodo e praticamente un riassunto in breve di anni di esperienza e di studi sull Analisi Tecnica di borsa con specializzazione in particolare
LE MEDIE MOBILI CENTRATE
 www.previsioniborsa.net 2 lezione METODO CICLICO LE MEDIE MOBILI CENTRATE Siamo rimasti a come risolvere il precedente problema del ritardo sulle medie mobili Quindi cosa dobbiamo fare? Dobbiamo semplicemente
www.previsioniborsa.net 2 lezione METODO CICLICO LE MEDIE MOBILI CENTRATE Siamo rimasti a come risolvere il precedente problema del ritardo sulle medie mobili Quindi cosa dobbiamo fare? Dobbiamo semplicemente
6^ parte : Acquisizione della temperatura con LM35. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 6^ parte : Acquisizione della temperatura con LM35 Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 5 Lo scopo è quello di far accendere due LED in base ad una soglia di temperatura
6^ parte : Acquisizione della temperatura con LM35 Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 5 Lo scopo è quello di far accendere due LED in base ad una soglia di temperatura
TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA
 TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA Molte persone (io compreso) che comprano la prima volta un LM35, lo fanno perché sono spinti da come sia facile da
TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA Molte persone (io compreso) che comprano la prima volta un LM35, lo fanno perché sono spinti da come sia facile da
MST_K12_INV. Regolatore di velocita per motori in CC con comando esterno della inversione della rotazione. Manuale d uso e d installazione
 MST_K12_INV Regolatore di velocita per motori in CC con comando esterno della inversione della rotazione Manuale d uso e d installazione INTRODUZIONE Il circuito MST_K12_INV e un semplice regolatore di
MST_K12_INV Regolatore di velocita per motori in CC con comando esterno della inversione della rotazione Manuale d uso e d installazione INTRODUZIONE Il circuito MST_K12_INV e un semplice regolatore di
LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1
 LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1 I CODICI 1 IL CODICE BCD 1 Somma in BCD 2 Sottrazione BCD 5 IL CODICE ECCESSO 3 20 La trasmissione delle informazioni Quarta Parte I codici Il codice BCD
LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1 I CODICI 1 IL CODICE BCD 1 Somma in BCD 2 Sottrazione BCD 5 IL CODICE ECCESSO 3 20 La trasmissione delle informazioni Quarta Parte I codici Il codice BCD
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari A.A. 2013 2014 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari A.A. 2013 2014 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Esercitazione di Laboratorio - Leve di 1-2 - 3 genere TITOLO ESERCITAZIONE: VERIFICA DELLE LEGGI DELLE LEVE
 TITOLO ESERCITAZIONE: VERIFICA DELLE LEGGI DELLE LEVE PREREQUISITI RICHIESTI PER LO SVOLGIMENTO DELL ATTIVITÀ DI LABORATORIO L alunno deve conoscere la definizione di forza, la definizione di momento.
TITOLO ESERCITAZIONE: VERIFICA DELLE LEGGI DELLE LEVE PREREQUISITI RICHIESTI PER LO SVOLGIMENTO DELL ATTIVITÀ DI LABORATORIO L alunno deve conoscere la definizione di forza, la definizione di momento.
Orietta Bay - Sestri Levante 2011
 Per -corso Orietta Bay - Sestri Levante 2011 Per -corso Fotografare è saper cogliere l essenza delle cose e degli avvenimenti e Scriverli con la luce La macchina fotografica Il cuore originario della
Per -corso Orietta Bay - Sestri Levante 2011 Per -corso Fotografare è saper cogliere l essenza delle cose e degli avvenimenti e Scriverli con la luce La macchina fotografica Il cuore originario della
APPLICATION SHEET Luglio
 Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
da 2 a 5 giocatori, dai 10 anni in su, durata 30 minuti
 da 2 a 5 giocatori, dai 10 anni in su, durata 30 minuti OBIETTIVO Il vincitore è colui che, dopo due round di gioco, delle sue 11 ordinazioni, ne ha consegnate il maggior numero. CONTENUTO DELLA SCATOLA
da 2 a 5 giocatori, dai 10 anni in su, durata 30 minuti OBIETTIVO Il vincitore è colui che, dopo due round di gioco, delle sue 11 ordinazioni, ne ha consegnate il maggior numero. CONTENUTO DELLA SCATOLA
I SISTEMI DI NUMERAZIONE
 ISTITUTO DI ISTRUZIONE SUPERIORE G. M. ANGIOY CARBONIA I SISTEMI DI NUMERAZIONE Prof. G. Ciaschetti Fin dall antichità, l uomo ha avuto il bisogno di rappresentare le quantità in modo simbolico. Sono nati
ISTITUTO DI ISTRUZIONE SUPERIORE G. M. ANGIOY CARBONIA I SISTEMI DI NUMERAZIONE Prof. G. Ciaschetti Fin dall antichità, l uomo ha avuto il bisogno di rappresentare le quantità in modo simbolico. Sono nati
SERVO Motors. Funzionamento Meccanico. Funzionamento Elettrico 30/05/2012
 SERVO Motors SERVO Il servomotore serve a gestire la posizione angolare di un disco rotante o di un braccio meccanico. Esso è costituito da un unico contenitore che ha all interno un motore DC (da 4,5
SERVO Motors SERVO Il servomotore serve a gestire la posizione angolare di un disco rotante o di un braccio meccanico. Esso è costituito da un unico contenitore che ha all interno un motore DC (da 4,5
IMPARARE GIOCANDO A 9/10 ANNI
 IMPARARE GIOCANDO A 9/10 ANNI appunti dalla lezione del 19 maggio 2002 al Clinic di Riccione relatore Maurizio Cremonini, Istruttore Federale Set. Scol. e Minibasket I BAMINI DEVONO SCOPRIRE CIO DI CUI
IMPARARE GIOCANDO A 9/10 ANNI appunti dalla lezione del 19 maggio 2002 al Clinic di Riccione relatore Maurizio Cremonini, Istruttore Federale Set. Scol. e Minibasket I BAMINI DEVONO SCOPRIRE CIO DI CUI
COME SI FORMA E COME SI RICONOSCE UN ROSS HOOK
 COME SI FORMA E COME SI RICONOSCE UN ROSS HOOK di Francesco Fabi Trader Professionista e Responsabile di Joe Ross Trading Educators Italia PREMESSA Il Ross Hook è una delle formazioni grafiche che sono
COME SI FORMA E COME SI RICONOSCE UN ROSS HOOK di Francesco Fabi Trader Professionista e Responsabile di Joe Ross Trading Educators Italia PREMESSA Il Ross Hook è una delle formazioni grafiche che sono
Gestione della memoria centrale
 Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Capitolo 3. L applicazione Java Diagrammi ER. 3.1 La finestra iniziale, il menu e la barra pulsanti
 Capitolo 3 L applicazione Java Diagrammi ER Dopo le fasi di analisi, progettazione ed implementazione il software è stato compilato ed ora è pronto all uso; in questo capitolo mostreremo passo passo tutta
Capitolo 3 L applicazione Java Diagrammi ER Dopo le fasi di analisi, progettazione ed implementazione il software è stato compilato ed ora è pronto all uso; in questo capitolo mostreremo passo passo tutta
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
GUIDA AL CALCOLO DEI COSTI DELLE ATTIVITA DI RICERCA DOCUMENTALE
 GUIDA AL CALCOLO DEI COSTI DELLE ATTIVITA DI RICERCA DOCUMENTALE L applicazione elaborata da Nordest Informatica e disponibile all interno del sito è finalizzata a fornirvi un ipotesi dell impatto economico
GUIDA AL CALCOLO DEI COSTI DELLE ATTIVITA DI RICERCA DOCUMENTALE L applicazione elaborata da Nordest Informatica e disponibile all interno del sito è finalizzata a fornirvi un ipotesi dell impatto economico
Tesina di scienze. L Elettricità. Le forze elettriche
 Tesina di scienze L Elettricità Le forze elettriche In natura esistono due forme di elettricità: quella negativa e quella positiva. Queste due energie si attraggono fra loro, mentre gli stessi tipi di
Tesina di scienze L Elettricità Le forze elettriche In natura esistono due forme di elettricità: quella negativa e quella positiva. Queste due energie si attraggono fra loro, mentre gli stessi tipi di
Come Calcolare un Preventivo RC Auto. www.marcoventuri.eu. Seguimi su. Marco Venturi Intermediario Assicurativo. MarcoVenturi10
 Come Calcolare un Preventivo RC Auto www.marcoventuri.eu Seguimi su Marco Venturi Intermediario Assicurativo MarcoVenturi10 https://www.linkedin.com/in/marcoventuri 2014 Marco Venturi Intermediario Assicurativo
Come Calcolare un Preventivo RC Auto www.marcoventuri.eu Seguimi su Marco Venturi Intermediario Assicurativo MarcoVenturi10 https://www.linkedin.com/in/marcoventuri 2014 Marco Venturi Intermediario Assicurativo
PRINCIPI DI TRASDUZIONE
 PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
INDICE. Assessorato turismo, sport, commercio e trasporti Infrastrutture funiviarie
 INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
Calcolo delle probabilità
 Calcolo delle probabilità Laboratorio di Bioinformatica Corso A aa 2005-2006 Statistica Dai risultati di un esperimento si determinano alcune caratteristiche della popolazione Calcolo delle probabilità
Calcolo delle probabilità Laboratorio di Bioinformatica Corso A aa 2005-2006 Statistica Dai risultati di un esperimento si determinano alcune caratteristiche della popolazione Calcolo delle probabilità
IEIM. Esercizio Gestione Automobili Strutture e Files 2014-2015. Alessandro A. Nacci nacci@elet.polimi.it - alessandronacci.it
 IEIM Esercizio Gestione Automobili Strutture e Files 2014-2015 Alessandro A. Nacci nacci@elet.polimi.it - alessandronacci.it 1 2 Automobili Rappresentare in C una automobile. Nel nostro caso, una automobile
IEIM Esercizio Gestione Automobili Strutture e Files 2014-2015 Alessandro A. Nacci nacci@elet.polimi.it - alessandronacci.it 1 2 Automobili Rappresentare in C una automobile. Nel nostro caso, una automobile
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini
 Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
I componenti di un Sistema di elaborazione. Memoria centrale. È costituita da una serie di CHIP disposti su una scheda elettronica
 I componenti di un Sistema di elaborazione. Memoria centrale Memorizza : istruzioni dati In forma BINARIA : 10001010101000110101... È costituita da una serie di CHIP disposti su una scheda elettronica
I componenti di un Sistema di elaborazione. Memoria centrale Memorizza : istruzioni dati In forma BINARIA : 10001010101000110101... È costituita da una serie di CHIP disposti su una scheda elettronica
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Quanto costa smaltire il fosfosgrassaggio?
 Quanto costa smaltire il fosfosgrassaggio? E davvero conveniente acquistare e gestire in proprio un impianto di trattamento, oppure è molto più semplice ed economico smaltire le soluzioni esauste tal quali
Quanto costa smaltire il fosfosgrassaggio? E davvero conveniente acquistare e gestire in proprio un impianto di trattamento, oppure è molto più semplice ed economico smaltire le soluzioni esauste tal quali
Database 1 biblioteca universitaria. Testo del quesito
 Database 1 biblioteca universitaria Testo del quesito Una biblioteca universitaria acquista testi didattici su indicazione dei professori e cura il prestito dei testi agli studenti. La biblioteca vuole
Database 1 biblioteca universitaria Testo del quesito Una biblioteca universitaria acquista testi didattici su indicazione dei professori e cura il prestito dei testi agli studenti. La biblioteca vuole
www.previsioniborsa.net COME SI ENTRA IN POSIZIONE
 www.previsioniborsa.net 5 lezione sul METODO CICLICO COME SI ENTRA IN POSIZIONE Ci sono molti modi per entrare in posizione in un mercato (future) o un titolo, ma noi dobbiamo trovare un sistema che sia
www.previsioniborsa.net 5 lezione sul METODO CICLICO COME SI ENTRA IN POSIZIONE Ci sono molti modi per entrare in posizione in un mercato (future) o un titolo, ma noi dobbiamo trovare un sistema che sia
REGOLATORE PWM. Rev.1 del 24/02/2012
 Generalità REGOAORE PWM Rev.1 del 24/02/2012 Propongo questo semplice circuito per il controllo di un dispositivo di potenza mediante la modulazione PWM (Pulse Width Modulation) di una tensione continua.
Generalità REGOAORE PWM Rev.1 del 24/02/2012 Propongo questo semplice circuito per il controllo di un dispositivo di potenza mediante la modulazione PWM (Pulse Width Modulation) di una tensione continua.
CALCOLATORI ELETTRONICI A cura di Luca Orrù. Lezione n.7. Il moltiplicatore binario e il ciclo di base di una CPU
 Lezione n.7 Il moltiplicatore binario e il ciclo di base di una CPU 1 SOMMARIO Architettura del moltiplicatore Architettura di base di una CPU Ciclo principale di base di una CPU Riprendiamo l analisi
Lezione n.7 Il moltiplicatore binario e il ciclo di base di una CPU 1 SOMMARIO Architettura del moltiplicatore Architettura di base di una CPU Ciclo principale di base di una CPU Riprendiamo l analisi
 CNC a 3 assi La domanda che mi sono subito fatto era questa: In che modo fare un incisore spendendo veramente poco ma avendo una macchina con una buona precisione? La risposta mi è subito venuta in mente
CNC a 3 assi La domanda che mi sono subito fatto era questa: In che modo fare un incisore spendendo veramente poco ma avendo una macchina con una buona precisione? La risposta mi è subito venuta in mente
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
RIGENERAZIONE E MODIFICA DI UNA INSCATOLATRICE NUOVA FIMA CPK_S5.
 RIGENERAZIONE E MODIFICA DI UNA INSCATOLATRICE NUOVA FIMA CPK_S5. La ditta E.G., operante nel settore ceramico da più di un decennio, ha maturato l'esperienza per la rigenerazione o modifica di molte macchine
RIGENERAZIONE E MODIFICA DI UNA INSCATOLATRICE NUOVA FIMA CPK_S5. La ditta E.G., operante nel settore ceramico da più di un decennio, ha maturato l'esperienza per la rigenerazione o modifica di molte macchine
L ambiente grafico e le viste
 1 In questo Tutorial impareremo a conoscere l ambiente grafico di Cinema 4D e a muoverci tra le varie viste dello stesso All apertura di Cinema 4D apparirà la seguente interfaccia Pag. 1 Clicchiamo nella
1 In questo Tutorial impareremo a conoscere l ambiente grafico di Cinema 4D e a muoverci tra le varie viste dello stesso All apertura di Cinema 4D apparirà la seguente interfaccia Pag. 1 Clicchiamo nella
Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android...
 Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
CIRCUITI OLEODINAMICI ELEMENTARI
 CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
La manutenzione come elemento di garanzia della sicurezza di macchine e impianti
 La manutenzione come elemento di garanzia della sicurezza di macchine e impianti Alessandro Mazzeranghi, Rossano Rossetti MECQ S.r.l. Quanto è importante la manutenzione negli ambienti di lavoro? E cosa
La manutenzione come elemento di garanzia della sicurezza di macchine e impianti Alessandro Mazzeranghi, Rossano Rossetti MECQ S.r.l. Quanto è importante la manutenzione negli ambienti di lavoro? E cosa
Disegno di Macchine. Lezione n 7 Componentistica di base: alberi. corso per I anno della laurea in ing. meccanica Docente: ing.
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 7 Componentistica di base: alberi Introduzione ai componenti di macchine I componenti meccanici
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 7 Componentistica di base: alberi Introduzione ai componenti di macchine I componenti meccanici
LA CORRENTE ELETTRICA CONTINUA
 LA CORRENTE ELETTRICA CONTINUA (Fenomeno, indipendente dal tempo, che si osserva nei corpi conduttori quando le cariche elettriche fluiscono in essi.) Un conduttore metallico è in equilibrio elettrostatico
LA CORRENTE ELETTRICA CONTINUA (Fenomeno, indipendente dal tempo, che si osserva nei corpi conduttori quando le cariche elettriche fluiscono in essi.) Un conduttore metallico è in equilibrio elettrostatico
IL MIO PRIMO SITO NEWS USANDO GLI SCHEDARI
 Pagina 1 UN SISTEMA DI NEWS Sommario UN SISTEMA DI NEWS...1 Introduzione...2 Scelgo l'area su cui operare...3 Un minimo di teoria...3 Creo le Pagine...4 Definizione dello Schedario Novità...6 Compilo la
Pagina 1 UN SISTEMA DI NEWS Sommario UN SISTEMA DI NEWS...1 Introduzione...2 Scelgo l'area su cui operare...3 Un minimo di teoria...3 Creo le Pagine...4 Definizione dello Schedario Novità...6 Compilo la
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
All interno del computer si possono individuare 5 componenti principali: SCHEDA MADRE. MICROPROCESSORE che contiene la CPU MEMORIA RAM MEMORIA ROM
 Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Convertitori numerici in Excel
 ISTITUTO DI ISTRUZIONE SUPERIORE G. M. ANGIOY CARBONIA Convertitori numerici in Excel Prof. G. Ciaschetti Come attività di laboratorio, vogliamo realizzare dei convertitori numerici con Microsoft Excel
ISTITUTO DI ISTRUZIONE SUPERIORE G. M. ANGIOY CARBONIA Convertitori numerici in Excel Prof. G. Ciaschetti Come attività di laboratorio, vogliamo realizzare dei convertitori numerici con Microsoft Excel
Informatica per le discipline umanistiche 2 lezione 14
 Informatica per le discipline umanistiche 2 lezione 14 Torniamo ai concetti base dellʼinformatica. Abbiamo sinora affrontato diversi problemi: avere unʼidentità online, cercare pagine Web, commentare il
Informatica per le discipline umanistiche 2 lezione 14 Torniamo ai concetti base dellʼinformatica. Abbiamo sinora affrontato diversi problemi: avere unʼidentità online, cercare pagine Web, commentare il
2. Spiegare brevemente qual è la funzione del compilatore e la sua importanza per il programmatore.
 1 Esercizio 1 1. Immaginate di avere una calcolatore che invece che poter rappresentare i classici due valori per ogni bit (0/1) possa rappresentare 7 valori per ogni bit. (a) Quanti bit gli occorreranno
1 Esercizio 1 1. Immaginate di avere una calcolatore che invece che poter rappresentare i classici due valori per ogni bit (0/1) possa rappresentare 7 valori per ogni bit. (a) Quanti bit gli occorreranno
MESSA IN SCALA DI ALGORITMI DIGITALI
 Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Anche nel caso che ci si muova e si regga una valigia il lavoro compiuto è nullo: la forza è verticale e lo spostamento orizzontale quindi F s =0 J.
 Lavoro Un concetto molto importante è quello di lavoro (di una forza) La definizione di tale quantità scalare è L= F dl (unità di misura joule J) Il concetto di lavoro richiede che ci sia uno spostamento,
Lavoro Un concetto molto importante è quello di lavoro (di una forza) La definizione di tale quantità scalare è L= F dl (unità di misura joule J) Il concetto di lavoro richiede che ci sia uno spostamento,
La propagazione delle onde luminose può essere studiata per mezzo delle equazioni di Maxwell. Tuttavia, nella maggior parte dei casi è possibile
 Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
SOLUZIONE PER LA PISCINA ALBERGHIERA, WELLNESS E SPA
 SOLUZIONE PER LA PISCINA ALBERGHIERA, WELLNESS E SPA L'ingresso controllato nella piscina alberghiera, wellness e spa Il sistema di chiusura elettronica degli armadietti Il braccialetto senza contatto
SOLUZIONE PER LA PISCINA ALBERGHIERA, WELLNESS E SPA L'ingresso controllato nella piscina alberghiera, wellness e spa Il sistema di chiusura elettronica degli armadietti Il braccialetto senza contatto
ci sono più problemi che programmi esiste un problema che non si può risolvere con un programma
 Calcolabilità problemi facili trovare la media di due numeri stampare le linee di un file che contengono una parola problemi difficili trovare il circuito minimo data una tabella determinare la migliore
Calcolabilità problemi facili trovare la media di due numeri stampare le linee di un file che contengono una parola problemi difficili trovare il circuito minimo data una tabella determinare la migliore
Circuito di pilotaggio ON OFF con operazionale
 PREMESSA Circuito di pilotaggio ON OFF con operazionale A cura del Prof. Marco Chirizzi www.marcochirizzi.it Si supponga di dovere progettare un circuito di pilotaggio ON OFF in grado di mantenere un fluido
PREMESSA Circuito di pilotaggio ON OFF con operazionale A cura del Prof. Marco Chirizzi www.marcochirizzi.it Si supponga di dovere progettare un circuito di pilotaggio ON OFF in grado di mantenere un fluido
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198
 SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
FAIRShip (La Navetta Spaziale)
") FAIRShip (La Navetta Spaziale) Il Gioco di FairStart Questo gioco è progettato per permettere ai giocatori di sperimentare e imparare il principio fondamentale del approccio di base sicura nella gestione
FAIRShip (La Navetta Spaziale) Il Gioco di FairStart Questo gioco è progettato per permettere ai giocatori di sperimentare e imparare il principio fondamentale del approccio di base sicura nella gestione
Arduino. Laboratorio Arduino Base. HackLab Terni. Laboratorio aperto a tutti di elettronica, scienza e arte. hacklabterni.
 Laboratorio Base HackLab Terni Laboratorio aperto a tutti di elettronica, scienza e arte. hacklabterni.org Cos'è? è una piattaforma di prototipazione elettronica open-source basata su microcontrollore
Laboratorio Base HackLab Terni Laboratorio aperto a tutti di elettronica, scienza e arte. hacklabterni.org Cos'è? è una piattaforma di prototipazione elettronica open-source basata su microcontrollore
Invio SMS. DM Board ICS Invio SMS
 Invio SMS In questo programma proveremo ad inviare un SMS ad ogni pressione di uno dei 2 tasti della DM Board ICS. Per prima cosa creiamo un nuovo progetto premendo sul pulsante (Create new project): dove
Invio SMS In questo programma proveremo ad inviare un SMS ad ogni pressione di uno dei 2 tasti della DM Board ICS. Per prima cosa creiamo un nuovo progetto premendo sul pulsante (Create new project): dove
Arduino. SITO DI RIFERIMENTO: http://www.arduino.cc/
 www.creativecommons.org/ Arduino SITO DI RIFERIMENTO: http://www.arduino.cc/ Cos è Arduino? Arduino è una piccola scheda elettronica programmabile open source in grado di connettere facilmente il mondo
www.creativecommons.org/ Arduino SITO DI RIFERIMENTO: http://www.arduino.cc/ Cos è Arduino? Arduino è una piccola scheda elettronica programmabile open source in grado di connettere facilmente il mondo
Guida all uso di Java Diagrammi ER
 Guida all uso di Java Diagrammi ER Ver. 1.1 Alessandro Ballini 16/5/2004 Questa guida ha lo scopo di mostrare gli aspetti fondamentali dell utilizzo dell applicazione Java Diagrammi ER. Inizieremo con
Guida all uso di Java Diagrammi ER Ver. 1.1 Alessandro Ballini 16/5/2004 Questa guida ha lo scopo di mostrare gli aspetti fondamentali dell utilizzo dell applicazione Java Diagrammi ER. Inizieremo con
Sommario. Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi.
 Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Informatica pratica. File e cartelle
 Informatica pratica File e cartelle Riassunto della puntata precedente Abbiamo visto a cosa serve un word processor: Quali sono i suoi benefici rispetto alla macchina da scrivere tradizionale Quali sono
Informatica pratica File e cartelle Riassunto della puntata precedente Abbiamo visto a cosa serve un word processor: Quali sono i suoi benefici rispetto alla macchina da scrivere tradizionale Quali sono
Traduzioni & Corsi di Lingue Udine. Via Cussignacco 27/4. P. IVA: 02159420302 tel/fax: 0432-229621 scuola@jmi.it
 APPUNTI PRIMO INCONTRO Sono passati quasi duecento anni dall invenzione dei primi strumenti in grado di registrare immagini ma si può dire che la fotocamera è costituita dagli stessi elementi basilari
APPUNTI PRIMO INCONTRO Sono passati quasi duecento anni dall invenzione dei primi strumenti in grado di registrare immagini ma si può dire che la fotocamera è costituita dagli stessi elementi basilari
Montaggio e configurazione hard disk Introduzione
 Pagina 1 di 10 Montaggio e configurazione hard disk Introduzione In questa parte vedremo come installare un hard disk di tipo EIDE in un computer PC ATX compatibile. I passi per l'istallazione saranno:
Pagina 1 di 10 Montaggio e configurazione hard disk Introduzione In questa parte vedremo come installare un hard disk di tipo EIDE in un computer PC ATX compatibile. I passi per l'istallazione saranno:
Autoware Ladder Tool (per Arduino ) Basic Tutorial
 Basic Tutorial") Per iniziare. Utilizzare il ns. pacchetto Autoware Ladder Tool (in breve Ladder Tool) per Arduino è veramente semplice. Elenchiamo qui di seguito i passi necessari per eseguire la ns. prima esercitazione.
Per iniziare. Utilizzare il ns. pacchetto Autoware Ladder Tool (in breve Ladder Tool) per Arduino è veramente semplice. Elenchiamo qui di seguito i passi necessari per eseguire la ns. prima esercitazione.
GIANLUIGI BALLARANI. I 10 Errori di Chi Non Riesce a Rendere Negli Esami Come Vorrebbe
 GIANLUIGI BALLARANI I 10 Errori di Chi Non Riesce a Rendere Negli Esami Come Vorrebbe Individuarli e correggerli 1 di 6 Autore di Esami No Problem 1 Titolo I 10 Errori di Chi Non Riesce a Rendere Negli
GIANLUIGI BALLARANI I 10 Errori di Chi Non Riesce a Rendere Negli Esami Come Vorrebbe Individuarli e correggerli 1 di 6 Autore di Esami No Problem 1 Titolo I 10 Errori di Chi Non Riesce a Rendere Negli
REALIZZAZIONE DI UN PCB E CREAZIONE DI UN COMPONENTE CON IL SOFTWARE EAGLE
 REALIZZAZIONE DI UN PCB E CREAZIONE DI UN COMPONENTE CON IL SOFTWARE EAGLE EASILY APPLICABLE GRAPHICAL LAYOUT-EDITOR for Linux and Windows Realizzato dallo studente: Pachito Marco Calabrese dell Istituto
REALIZZAZIONE DI UN PCB E CREAZIONE DI UN COMPONENTE CON IL SOFTWARE EAGLE EASILY APPLICABLE GRAPHICAL LAYOUT-EDITOR for Linux and Windows Realizzato dallo studente: Pachito Marco Calabrese dell Istituto
IL CAMPO MAGNETICO. V Scientifico Prof.ssa Delfino M. G.
 IL CAMPO MAGNETICO V Scientifico Prof.ssa Delfino M. G. UNITÀ - IL CAMPO MAGNETICO 1. Fenomeni magnetici 2. Calcolo del campo magnetico 3. Forze su conduttori percorsi da corrente 4. La forza di Lorentz
IL CAMPO MAGNETICO V Scientifico Prof.ssa Delfino M. G. UNITÀ - IL CAMPO MAGNETICO 1. Fenomeni magnetici 2. Calcolo del campo magnetico 3. Forze su conduttori percorsi da corrente 4. La forza di Lorentz
LABORATORIO DI SISTEMI
 ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
GUIDA ALLA PROGRAMMAZIONE GRAFICA IN C
 GUIDA ALLA PROGRAMMAZIONE GRAFICA IN C.:luxx:. PREMESSE In questa guida non verranno trattati i costrutti di flusso, le funzioni, o comunque le caratteristiche del linguaggio, che si danno come presupposte.
GUIDA ALLA PROGRAMMAZIONE GRAFICA IN C.:luxx:. PREMESSE In questa guida non verranno trattati i costrutti di flusso, le funzioni, o comunque le caratteristiche del linguaggio, che si danno come presupposte.
Capitolo 2. Operazione di limite
 Capitolo 2 Operazione di ite In questo capitolo vogliamo occuparci dell operazione di ite, strumento indispensabile per scoprire molte proprietà delle funzioni. D ora in avanti riguarderemo i domini A
Capitolo 2 Operazione di ite In questo capitolo vogliamo occuparci dell operazione di ite, strumento indispensabile per scoprire molte proprietà delle funzioni. D ora in avanti riguarderemo i domini A
Sensori di velocità del vento. Manuale utente
 Cod. MW6017 Sensori di velocità del vento Manuale utente Aggiornamento 26/09/2014 INSTUM_00191 Pag. 1/10 Sommario 1 Descrizione... 3 1.1 Caratteristiche principali... 3 1.2 Modelli e caratteristiche tecniche...
Cod. MW6017 Sensori di velocità del vento Manuale utente Aggiornamento 26/09/2014 INSTUM_00191 Pag. 1/10 Sommario 1 Descrizione... 3 1.1 Caratteristiche principali... 3 1.2 Modelli e caratteristiche tecniche...
Capitolo. Interfacciamento di periferiche I/O con il PC. 1.1 Il BUS di espansione del PC
 Capitolo 1 Interfacciamento di periferiche I/O con il PC 1.1 Il BUS di espansione del PC 1.2 Interfacciamento di periferiche I/O con il PC, con dispositivi non programmabili 1.3 Istruzioni per leggere
Capitolo 1 Interfacciamento di periferiche I/O con il PC 1.1 Il BUS di espansione del PC 1.2 Interfacciamento di periferiche I/O con il PC, con dispositivi non programmabili 1.3 Istruzioni per leggere
INSEGUITORE SOLARE CON ARDUINO. Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3.
 INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
ESEMPIO 1: eseguire il complemento a 10 di 765
 COMPLEMENTO A 10 DI UN NUMERO DECIMALE Sia dato un numero N 10 in base 10 di n cifre. Il complemento a 10 di tale numero (N ) si ottiene sottraendo il numero stesso a 10 n. ESEMPIO 1: eseguire il complemento
COMPLEMENTO A 10 DI UN NUMERO DECIMALE Sia dato un numero N 10 in base 10 di n cifre. Il complemento a 10 di tale numero (N ) si ottiene sottraendo il numero stesso a 10 n. ESEMPIO 1: eseguire il complemento
ESERCITAZIONI PRATICHE: Ø Creazione di un decoder BCD/DEC con porte logiche. Ø Esercitazione con decoder 4511 e display 7 segmenti.
 BCD 7 SEGMENTI Il display BCD 7 segmenti è un visualizzatore di numeri che possono andare da zero a nove, ed è un dispositivo optoelettrico, cioè fornisce luce all applicazione di tensione ai suoi capi.
BCD 7 SEGMENTI Il display BCD 7 segmenti è un visualizzatore di numeri che possono andare da zero a nove, ed è un dispositivo optoelettrico, cioè fornisce luce all applicazione di tensione ai suoi capi.
Sistemi Web! per il turismo! - lezione 3 -
 Sistemi Web per il turismo - lezione 3 - I computer sono in grado di eseguire molte operazioni, e di risolvere un gran numero di problemi. E arrivato il momento di delineare esplicitamente il campo di
Sistemi Web per il turismo - lezione 3 - I computer sono in grado di eseguire molte operazioni, e di risolvere un gran numero di problemi. E arrivato il momento di delineare esplicitamente il campo di
Testo Esercizio. Un modello è ragionevole quando contiene queste tre caratteristiche.
 Testo Esercizio Si consideri la realizzazione di un semplice programma grafico per il disegno di figure geometriche in due dimensioni. Si analizzino i requisiti e se ne rappresentino i risultati in UML
Testo Esercizio Si consideri la realizzazione di un semplice programma grafico per il disegno di figure geometriche in due dimensioni. Si analizzino i requisiti e se ne rappresentino i risultati in UML
Inclinometro Omnidirezionale Modello 400B 401B
 Inclinometro Omnidirezionale Modello 400B 401B CARATTERISTICHE: CARATTERISTICHE TECNICHE: Stendalto s.r.l. Via Provinciale Est, 16 40053 Bazzano (BO) Italia Uff. tecnico-comm.: tel. 0 5 1-8 3 4 0 7 0 (r.a.)
Inclinometro Omnidirezionale Modello 400B 401B CARATTERISTICHE: CARATTERISTICHE TECNICHE: Stendalto s.r.l. Via Provinciale Est, 16 40053 Bazzano (BO) Italia Uff. tecnico-comm.: tel. 0 5 1-8 3 4 0 7 0 (r.a.)
Corso di Informatica
 Corso di Informatica Modulo T Scorrimento-Rotazione-Ricerca Prerequisiti Programmazione elementare Conoscenza ed uso di vettori Introduzione Lo scopo di questa Unità è approfondire il concetto di vettore
Corso di Informatica Modulo T Scorrimento-Rotazione-Ricerca Prerequisiti Programmazione elementare Conoscenza ed uso di vettori Introduzione Lo scopo di questa Unità è approfondire il concetto di vettore
LA FORZA E IL MOTO: ISACC NEWTON UN RE SCONTROSO
 WebQuest Studentessa Guidi Elisabetta Corso Laurea Scienze Formazione Primaria Università di Urbino Carlo Bo LA FORZA E IL MOTO: ISACC NEWTON UN RE SCONTROSO 1) INTRODUZIONE Il 1642 è un anno storico per
WebQuest Studentessa Guidi Elisabetta Corso Laurea Scienze Formazione Primaria Università di Urbino Carlo Bo LA FORZA E IL MOTO: ISACC NEWTON UN RE SCONTROSO 1) INTRODUZIONE Il 1642 è un anno storico per
SCHEMA TIPICO DEL CONTROLLO DI TEMPERATURA TIPO ON/OFF.
 file:controllo ON-OFF.doc Appunti Sistemi Elettrici Automatici Pagina 1 di 6 SCHEMA TIPICO DEL CONTROLLO DI TEMPERATURA TIPO ON/OFF. (fig 1) Ta Vr Ve Vc RESISTENZA ELETTRICA P T Tint RT V Condizionatore
file:controllo ON-OFF.doc Appunti Sistemi Elettrici Automatici Pagina 1 di 6 SCHEMA TIPICO DEL CONTROLLO DI TEMPERATURA TIPO ON/OFF. (fig 1) Ta Vr Ve Vc RESISTENZA ELETTRICA P T Tint RT V Condizionatore