Introduzione al Corso
|
|
|
- Giancarlo Nardi
- 8 anni fa
- Visualizzazioni
Transcript
1 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania, Italy gmuscato@diees.unict.it Page 1

2 Controllo Intelligente Definizione di Controllo Intelligente Tecniche di controllo che utilizzano metodologie Soft Computing quali Reti neurali, Fuzzy Logic, Algoritmi genetici, ecc. Robotica Un ROBOT è un manipolatore multifunzionale riprogrammabile progettato per spostare materiali, parti, utensili o dispositivi specializzati, per mezzo di movimenti variabili programmati per l esecuzione di un dato numero di compiti. La robotica è stata recentemente definita come la scienza che studia la connessione intelligente tra percezione e azione Page 2

3 Percezione - Azione La capacità di agire, sull'ambiente è offerta da un sistema meccanico dotato in generale di organi di locomozione per muoversi e di organi di manipolazione che intervengono sugli oggetti presenti. La capacità di percezione è affidata ad un sistema sensoriale in grado di acquisire informazioni, sullo stato interno (sensori propriocettivi) e sullo stato esterno (sensori eterocettivi). La capacità di connettere, in maniera intelligente, azioni e percezioni è affidata ad un sistema di governo (elaboratore) che sia in grado di comandare l'azione nel rispetto dei vincoli imposti dal sistema meccanico (fine corsa dei giunti) e dell'ambiente (ostacoli). Con il termine robotica avanzata si fa riferimento alla scienza che studia robot con spiccate caratteristiche di autonomia, le cui applicazioni sono concepite per risolvere problemi di operatività in ambienti ostili (spazio, sottomarino, nucleare, militare,...) o per eseguire missioni di servizio (applicazioni domestiche, assistenza medica, assistenza ai disabili, agricoltura,...). Introduzione Introduzione al corso. Robotica. Classificazione. Esempi. Cinematica. Dinamica. Traiettorie. Controllo Robotica mobile. Configurazioni. Localizzazione, Pianificazione del percorso, Aggiramento di ostacoli, Navigazione. Sensori e attuatori per robot. Sistemi di visione per la robotica. Percezione, Preelaborazione, Segmentazione, Descrizione, Riconoscimento, Interpretazione. Applicazioni di robot. Page 3
 che sia in grado di comandare l'azione nel rispetto dei vincoli imposti dal")
4 Introduzione Controllo Intelligente. Logica Fuzzy. Controllo Fuzzy. Reti Neurali. Il perceptrone multistrato, Apprendimento, Radial Basis Function. Identificazione di sistemi dinamici mediante reti neurali e sistemi Fuzzy. Algoritmi genetici. Controllori intelligenti. Ottimizzazione di controllori intelligenti. Laboratorio. Il MATLAB. Robotic Toolbox. Fuzzy Toolbox. Neural Network Toolbox. Genetic toolbox. Il Simulink. Simulazione in Simulink di sistemi dinamici e identificazione mediante reti neurali. Simulazione di sistemi di controllo Fuzzy. Programmazione di microcontrollori. Controllo di sistemi robotici mediante microcontrollori. I robot Industriali Un robot industriale è costituito da : Una struttura meccanica, o manipolatore, che consiste in un insieme di corpi rigidi (bracci) interconnessi tra loro per mezzo d'articolazioni (giunti); nel manipolatore si individuano una struttura portante, che ne assicura la mobilità, un polso, che conferisce destrezza, ed un organo terminale che esegue il compito per il quale il robot è utilizzato. Attuatori che imprimono il movimento al manipolatore attraverso l azione dei giunti; si impiegano usualmente motori elettrici, idraulici e talvolta pneumatici. Sensori che misurano lo stato del manipolatore ed eventualmente lo stato dell ambiente. Una unità di governo con funzioni di controllo e supervisione dei movimenti del manipolatore. Page 4

5 Manipolatore industriale Struttura dei manipolatori Catena cinematica aperta o chiusa Da un punto di vista topologico, una catena cinematica è detta aperta quando vi è una sola sequenza di bracci che connette i due estremi della catena. Alternativamente un manipolatore contiene una catena cinematica chiusa quando una sequenza di bracci forma un anello. Giunti di tipo prismatico o di tipo rotoidale. In una catena cinematica aperta ogni giunto, prismatico o rotoidale, conferisce un singolo grado di mobilità. Un giunto prismatico realizza un moto relativo di traslazione tra due bracci, un giunto rotoidale conferisce un moto relativo di rotazione tra due bracci. Page 5

6 Gradi di mobilità I gradi di mobilità devono essere opportunamente distribuiti lungo la struttura meccanica in modo da fornire i gradi di libertà richiesti, per l'esecuzione di un dato compito. Nel caso più generale di un compito, che consiste nel posizionamento e nell'orientamento di un oggetto, sono necessari sei gradi di libertà, se il numero dei gradi di mobilità sono superiori ai gradi di libertà richiesti, il manipolatore si dice ridondante. Classificazione dei manipolatori Geometria cartesiana Geometria cilindrica Geometria sferica Geometria SCARA Geometria antropomorfa Page 6

7 Geometria Cartesiana Geometria Cartesiana Page 7

8 Geometria cilindrica Geometria sferica Page 8

9 Geometria SCARA Selective Compliance Assembly Robot Arm Geometria SCARA Selective Compliance Assembly Robot Arm Page 9

10 Geometria Antropomorfa Geometria Antropomorfa Page 10

11 Geometria Antropomorfa Polso sferico Page 11

12 Applicazioni dei Robot Industriali Saldatura (a punti e ad arco) Verniciatura spray Molatura (Rettifica, Smerigliatura,...) Trasferimento di materiali Assemblaggio di parti Ordinamento di materiali Ispezione di materiali Applicazioni dei Robot Industriali TRASPORTO palettizzazione (disposizione di oggetti in maniera preordinata su un opportuno supporto raccoglitore) carico e scarico di magazzini carico e scarico di macchine operatrici e macchine utensili selezione e smistamento di parti confezionamento di merci Page 12

13 Applicazioni dei Robot Industriali MANIPOLAZIONE saldatura ad arco e a punti verniciatura a spruzzo fresatura e trapanatura incollaggio taglio laser ed a getto d acqua finitura assemblaggio di gruppi meccanici ed elettrici montaggio di schede elettroniche avvitatura cablaggio Applicazioni dei Robot Industriali MISURA collaudo dimensionale rivelamento di profili individuazione di difetti di fabbricazione Page 13

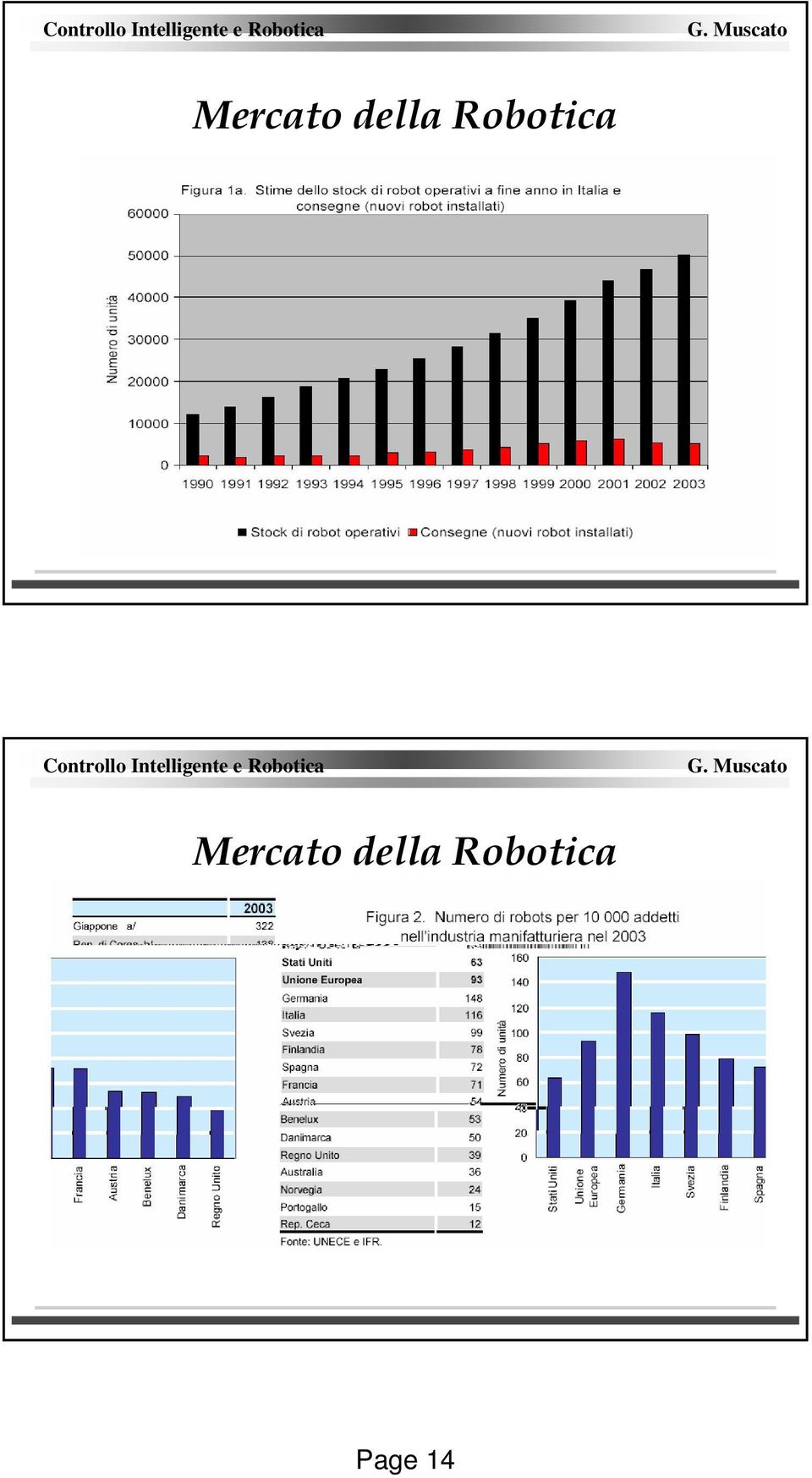
14 Mercato della Robotica Mercato della Robotica Page 14
15 Mercato della Robotica Mercato della Robotica Page 15

16 Mercato della Robotica Mercato della Robotica Page 16

17 Mercato della Robotica ROBOTICA Vincoli Coppie Movimento nello spazio dei giunti Generatore di traiettorie Cinematica inversa Controllo delle traiettorie Attuatori Meccanica Ambiente Controllo del compito Compito Sensori di stato interno Sensori di stato esterno Page 17

18 Le tre leggi della Robotica 1. Un robot non può fare del male a un essere umano ne consentire, restando inoperoso, che un essere umano si trovi in pericolo. 2. Un robot deve obbedire agli ordini impartiti da esseri umani, a meno che tali ordini non contrastino con la prima legge. 3. Un robot deve proteggere la sua esistenza a meno che tale protezione non vada contro la prima e la seconda legge. Page 18

Introduzione al corso
 Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali
 Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
Fondamenti di robotica
 Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Componenti per la robotica: Generalità e Attuatori
 Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Introduzione alla Robotica
 1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
Programmazione Fondi Strutturali 2007/2013 P.O.N. FSE A.S. 2013/2014 SCHEDA PROGETTUALE MODULO MECCANICA, MECCATRONICA, ENERGIA
 ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
Robotica industriale. Introduzione al corso. Prof. Paolo Rocco (paolo.rocco@polimi.it)
") Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO.
 L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO. DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE Confronto tra giunti GRADI DI LIBERTA DEL ROBOT Si definiscono
L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO. DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE Confronto tra giunti GRADI DI LIBERTA DEL ROBOT Si definiscono
ROBOT CARTESIANI. Abbiamo 9 modelli di robot cartesiani che possono essere forniti in 3 tipologie diverse:
 ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
LA PROGRAMMAZIONE N10 G0 X5 Y5
 LA PROGRAMMAZIONE Un programma per una Macchina Utensile CNC è costituito da una sequenza logica di informazioni geometriche, tecnologiche ed ausiliarie (fasi di lavoro). Le informazioni geometriche riguardano
LA PROGRAMMAZIONE Un programma per una Macchina Utensile CNC è costituito da una sequenza logica di informazioni geometriche, tecnologiche ed ausiliarie (fasi di lavoro). Le informazioni geometriche riguardano
CINEMATICA DEI MECCANISMI DEFINIZIONI
 CINEMATICA APPLICATA Indice Cinematica del punto materiale Definizioni Tipologie di moto Strumenti matematici Applicazioni Cinematica del corpo rigido Definizioni Centro di istantanea rotazione Formula
CINEMATICA APPLICATA Indice Cinematica del punto materiale Definizioni Tipologie di moto Strumenti matematici Applicazioni Cinematica del corpo rigido Definizioni Centro di istantanea rotazione Formula
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC
 PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC A cura di Massimo Reboldi Versione 2.0 7/1/14 La programmazione EIA/ISO! Introduzione! Assi e Riferimenti! Linguaggio di programmazione! Grammatica;! Lessico;!
PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC A cura di Massimo Reboldi Versione 2.0 7/1/14 La programmazione EIA/ISO! Introduzione! Assi e Riferimenti! Linguaggio di programmazione! Grammatica;! Lessico;!
Caratteristiche costruttive dei robot industriali
 61 Caratteristiche costruttive dei robot industriali L architettura del robot è quella descritta schematicamente in figura 1, costituita dai seguenti sottoinsiemi: struttura meccanica; sistema d azionamento;
61 Caratteristiche costruttive dei robot industriali L architettura del robot è quella descritta schematicamente in figura 1, costituita dai seguenti sottoinsiemi: struttura meccanica; sistema d azionamento;
Automazione e controllo
 Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura
 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione II anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione II anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
2.2.3 Comportamento degli organi che trasformano l energia meccanica 32 2.2.3.1 Effetti inerziali 32 2.2.3.2 Effetto della rigidezza e dello
 Indice Prefazione IX 1. Un nuovo approccio alla progettazione e costruzione di macchine 1 1.1 Sistemi tecnici nella costruzione di macchine: esempi 1 1.2 Concetti essenziali del nuovo approccio alla progettazione
Indice Prefazione IX 1. Un nuovo approccio alla progettazione e costruzione di macchine 1 1.1 Sistemi tecnici nella costruzione di macchine: esempi 1 1.2 Concetti essenziali del nuovo approccio alla progettazione
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
AUTOMAZIONE INDUSTRIALE
 AUTOMAZIONE INDUSTRIALE Lo schema seguente descrive l evoluzione dei sistemi di produzione industriale con l avvento dell automazione. Vengono presi in considerazione la lavorazione alle macchine utensili,
AUTOMAZIONE INDUSTRIALE Lo schema seguente descrive l evoluzione dei sistemi di produzione industriale con l avvento dell automazione. Vengono presi in considerazione la lavorazione alle macchine utensili,
IL MONDO DEI ROBOT: I PROTAGONISTI DELL AUTOMAZIONE INDUSTRIALE
 IL MONDO DEI ROBOT: I PROTAGONISTI DELL AUTOMAZIONE INDUSTRIALE La realizzazione di sistemi di controllo automatico si può far risalire ad epoche piuttosto remote nella storia dell umanità. Le prime applicazioni
IL MONDO DEI ROBOT: I PROTAGONISTI DELL AUTOMAZIONE INDUSTRIALE La realizzazione di sistemi di controllo automatico si può far risalire ad epoche piuttosto remote nella storia dell umanità. Le prime applicazioni
Progettazione e realizzazione di un manipolatore elettromeccanico
 Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
Ministero dell istruzione, dell università e della ricerca. Liceo Tecnologico. Indirizzo Elettrico Elettronico
 Ministero dell istruzione, dell università e della ricerca Liceo Tecnologico Indicazioni nazionali per i Piani di Studio Personalizzati Obiettivi Specifici di Apprendimento Allegato_C8-LT-02-Elettrico
Ministero dell istruzione, dell università e della ricerca Liceo Tecnologico Indicazioni nazionali per i Piani di Studio Personalizzati Obiettivi Specifici di Apprendimento Allegato_C8-LT-02-Elettrico
Robot industriale Tipi di robot (robot cartesiani, robot SCARA, robot antropomorfi) 6dof (gradi di libertà) Un esempio di robot: ICube
 6dof (gradi di libertà) Un esempio di robot: ICube") ROBOTICA Conoscenze di base sui concetti di : Robot industriale Tipi di robot (robot cartesiani, robot SCARA, robot antropomorfi) 6dof (gradi di libertà) Un esempio di robot: ICube Robot industriale Un
ROBOTICA Conoscenze di base sui concetti di : Robot industriale Tipi di robot (robot cartesiani, robot SCARA, robot antropomorfi) 6dof (gradi di libertà) Un esempio di robot: ICube Robot industriale Un
CIM A CIM B. Computer-Integrated Manufacturing (CIM)
") Computer-Integrated Manufacturing (CIM) Il Computer Integrated Manufacturing (CIM) è un metodo di produzione nel quale l'intero processo produttivo è controllato da un computer. Tipicamente, è composto
Computer-Integrated Manufacturing (CIM) Il Computer Integrated Manufacturing (CIM) è un metodo di produzione nel quale l'intero processo produttivo è controllato da un computer. Tipicamente, è composto
TECNOLOGIA MECCANICA LE MACCHINE UTENSILI A CNC I Centri di Lavoro
 LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
1 Introduzione al corso 3 1.1 Architettura del sistema di controllo... 6
 Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
Corso di Studio in Ingegneria dell Automazione. Open Day 15 Febbraio 2014
 Corso di Studio in Ingegneria dell Automazione Open Day 15 Febbraio 2014 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Corso di Studio in Ingegneria dell Automazione Open Day 15 Febbraio 2014 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Robotica. La robotica
 Robotica 1/20 La robotica Il termine robot deriva dal ceco "ROBOTA" (lavoratore), introdotto per la prima volta nel 1920 dal commediografo Karel Capek. Secondo il R.I.A. (Robot Institute of America) il
Robotica 1/20 La robotica Il termine robot deriva dal ceco "ROBOTA" (lavoratore), introdotto per la prima volta nel 1920 dal commediografo Karel Capek. Secondo il R.I.A. (Robot Institute of America) il
Il ciclo di lavorazione
 INTRODUZIONE AI CICLI DI LAVORAZIONE Rif. Bibliografico: Giusti-Santochi TECNOLOGIA MECCANICA e studi di fabbricazione Capitolo 9 1 Il ciclo di lavorazione DEFINIZIONE: Si dice CICLO DI LAVORAZIONE tutto
INTRODUZIONE AI CICLI DI LAVORAZIONE Rif. Bibliografico: Giusti-Santochi TECNOLOGIA MECCANICA e studi di fabbricazione Capitolo 9 1 Il ciclo di lavorazione DEFINIZIONE: Si dice CICLO DI LAVORAZIONE tutto
Liceo Tecnologico. Indirizzo Elettrico Elettronico. Indicazioni nazionali per Piani di Studi Personalizzati
 Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
Automazione Industriale
 Politecnico di Milano Prof. Luca Ferrarini Tel. 02-2399-3672 e-mail luca.ferrarini@polimi.it http://www.elet.polimi.it/upload/ferrarin/ miai2004/corso.html 1 Orario del corso Lunedì 8.15-10.15 T.1.1 Martedì
Politecnico di Milano Prof. Luca Ferrarini Tel. 02-2399-3672 e-mail luca.ferrarini@polimi.it http://www.elet.polimi.it/upload/ferrarin/ miai2004/corso.html 1 Orario del corso Lunedì 8.15-10.15 T.1.1 Martedì
Scopo della lezione. Informatica. Informatica - def. 1. Informatica
 Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Sommario. Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi.
 Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
CABINE ELETTRICHE DI TRASFORMAZIONE
 Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Qualificazione dell installatore, gestore e manutentore di impianti eolici: Livello 4
 Qualificazione dell installatore, gestore e manutentore di impianti eolici: Livello 4 REQUISITI MINIMI DI ACCESSO E CORSI E LEARNING/VIDEO LEZIONI DISPONIBILI CONOSCENZE CONTENUTI FORMATIVI SUGGERITI PER
Qualificazione dell installatore, gestore e manutentore di impianti eolici: Livello 4 REQUISITI MINIMI DI ACCESSO E CORSI E LEARNING/VIDEO LEZIONI DISPONIBILI CONOSCENZE CONTENUTI FORMATIVI SUGGERITI PER
LA ROBOTICA INDUSTRIALE
 LA ROBOTICA INDUSTRIALE Ricerca di: Rossana Cavallaro Amalia Ghini Dipartimento di Scienze Economiche e Aziendali Economia aziendale - Teoria del controllo a.a. 2015/2016 ORIGINE Il termine robot deriva
LA ROBOTICA INDUSTRIALE Ricerca di: Rossana Cavallaro Amalia Ghini Dipartimento di Scienze Economiche e Aziendali Economia aziendale - Teoria del controllo a.a. 2015/2016 ORIGINE Il termine robot deriva
RIPARI DI PROTEZIONE TIPI E CRITERI DI SCELTA
 RIPARI DI PROTEZIONE TIPI E CRITERI DI SCELTA Tipologia: fisso a segregazione totale barriera distanziatrice - a tunnel mobile motorizzato a chiusura automatica regolabile interbloccato interbloccato con
RIPARI DI PROTEZIONE TIPI E CRITERI DI SCELTA Tipologia: fisso a segregazione totale barriera distanziatrice - a tunnel mobile motorizzato a chiusura automatica regolabile interbloccato interbloccato con
SLINGOFER S.R.L. Informativa Sulle Attrezzature Revisionate e Certificate INDICE STATO DI CONSERVAZIONE... ... ... SCOPO DEL SERVIZIO... ...
 Informativa Sulle Attrezzature Revisionate e Certificate INDICE ATTESTATI SULLO S STATO DI CONSERVAZIONE... 2 SCOPO DEL SERVIZIO......... 5 METODO DI LAVORO......... 6 1/9 ESEMPI DI RICONDIZIONAMENTO MACCHINE...
Informativa Sulle Attrezzature Revisionate e Certificate INDICE ATTESTATI SULLO S STATO DI CONSERVAZIONE... 2 SCOPO DEL SERVIZIO......... 5 METODO DI LAVORO......... 6 1/9 ESEMPI DI RICONDIZIONAMENTO MACCHINE...
I Problemi e la loro Soluzione. Il Concetto Intuitivo di Calcolatore. Risoluzione di un Problema. Esempio
 Il Concetto Intuitivo di Calcolatore Fondamenti di Informatica A Ingegneria Gestionale Università degli Studi di Brescia Docente: Prof. Alfonso Gerevini I Problemi e la loro Soluzione Problema: classe
Il Concetto Intuitivo di Calcolatore Fondamenti di Informatica A Ingegneria Gestionale Università degli Studi di Brescia Docente: Prof. Alfonso Gerevini I Problemi e la loro Soluzione Problema: classe
Istituto d Istruzione Superiore C. Rosatelli - Rieti
 Allegato n. 7 Offerta formativa secondo gli ordinamenti preesistenti L'Istituto C. Rosatelli fornisce per gli studenti iscritti nelle classi 5 e i seguenti diplomi: Diploma di Perito industriale L ITIS
Allegato n. 7 Offerta formativa secondo gli ordinamenti preesistenti L'Istituto C. Rosatelli fornisce per gli studenti iscritti nelle classi 5 e i seguenti diplomi: Diploma di Perito industriale L ITIS
ROBOT. 1. Premessa. asservimento alle macchine utensili (scarico dei pezzi lavorati e carico dei pezzi da lavorare);
;") ROBOT 1. Premessa Il termine Robot viene introdotto per la prima volta nel 1920 dal commediografo Karel Capek con il termine ceco "robota" (lavoratore). Isaac Asimov, scrittore di libri divulgativi e di
ROBOT 1. Premessa Il termine Robot viene introdotto per la prima volta nel 1920 dal commediografo Karel Capek con il termine ceco "robota" (lavoratore). Isaac Asimov, scrittore di libri divulgativi e di
Meccanico montaggio / INTRODUZIONE / INDUSTRIALE o MOBILE
 Meccanico montaggio / INTRODUZIONE / INDUSTRIALE o MOBILE STAGE LIBERTY 1 : NOZIONI DI MONTAGGIO E DI REGOLAZIONE DI UN IMPIANTO OLEODINAMICO Regole di controllo di montaggio e precauzioni preliminari,
Meccanico montaggio / INTRODUZIONE / INDUSTRIALE o MOBILE STAGE LIBERTY 1 : NOZIONI DI MONTAGGIO E DI REGOLAZIONE DI UN IMPIANTO OLEODINAMICO Regole di controllo di montaggio e precauzioni preliminari,
Elementi di robotica industriale
 Elementi di robotica industriale Stefano Ferrari Università degli Studi di Milano ferrari@dti.unimi.it Corso di Robotica Industriale IFTS Industrializzazione del Prodotto e del Processo Motivazioni dell
Elementi di robotica industriale Stefano Ferrari Università degli Studi di Milano ferrari@dti.unimi.it Corso di Robotica Industriale IFTS Industrializzazione del Prodotto e del Processo Motivazioni dell
PROGRAMMAZIONE della M.U. CNC
 PROGRAMMAZIONE della M.U. CNC 1 La programmazione delle M.U. CNC 1 Generalità 2 Geometrie di riferimento 3 Grammatica 4 Lessico 5 Sintassi 6 Esempi 7 Linguaggio APT 2 La programmazione delle M.U. CNC Le
PROGRAMMAZIONE della M.U. CNC 1 La programmazione delle M.U. CNC 1 Generalità 2 Geometrie di riferimento 3 Grammatica 4 Lessico 5 Sintassi 6 Esempi 7 Linguaggio APT 2 La programmazione delle M.U. CNC Le
Macchine per lo spandimento di concimi granulati
 Macchine per lo spandimento di concimi granulati Gli organi di distribuzione sono adeguatamente protetti contro il contatto non intenzionale? In relazione al pericolo in questione i riferimenti tecnici
Macchine per lo spandimento di concimi granulati Gli organi di distribuzione sono adeguatamente protetti contro il contatto non intenzionale? In relazione al pericolo in questione i riferimenti tecnici
OPERATORE DI IMPIANTI TERMO-IDRAULICI
 OPERATORE DI IMPIANTI TERMO-IDRAULICI Descrizione sintetica della figura L operatore di impianti termo-idraulici interviene, a livello esecutivo, nel processo di realizzazione e manutenzione dell impiantistica
OPERATORE DI IMPIANTI TERMO-IDRAULICI Descrizione sintetica della figura L operatore di impianti termo-idraulici interviene, a livello esecutivo, nel processo di realizzazione e manutenzione dell impiantistica
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione
 PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
DISEGNO TECNICO INDUSTRIALE
 DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
Modellistica e Controllo di Sistemi ad Eventi Discreti
 Modellistica e Controllo di Sistemi ad Eventi Discreti Cos è l Automazione Industriale? Automazione Industriale: insieme di discipline (modelli, metodi e strumenti) che permettono di analizzare e progettare
Modellistica e Controllo di Sistemi ad Eventi Discreti Cos è l Automazione Industriale? Automazione Industriale: insieme di discipline (modelli, metodi e strumenti) che permettono di analizzare e progettare
Normativa (UNI EN ISO 8373)
") UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
CAPITOLO 4 I PROCESSI PRODUTTIVI CONDIZIONATI DALLE CARATTERISTICHE DELL IMPIANTO
 CAPITOLO 4 I PROCESSI PRODUTTIVI CONDIZIONATI DALLE CARATTERISTICHE DELL IMPIANTO L assemblaggio di un automobile Descrizione generale Il processo produttivo della GMAD (General Motors Assembly Division)
CAPITOLO 4 I PROCESSI PRODUTTIVI CONDIZIONATI DALLE CARATTERISTICHE DELL IMPIANTO L assemblaggio di un automobile Descrizione generale Il processo produttivo della GMAD (General Motors Assembly Division)
ISIS C.Facchinetti Sede: via Azimonti, 5 21053 Castellanza. INDIRIZZO: manutenzione assistenza tecnica
 Tel. 0331635718 INDIRIZZO: manutenzione assistenza tecnica OPZIONE apparati,impianti e servizi tecnici industriali e civili DISCIPLINA: tecnologie e tecniche di installazione e manutenzione PIANO DELLE
Tel. 0331635718 INDIRIZZO: manutenzione assistenza tecnica OPZIONE apparati,impianti e servizi tecnici industriali e civili DISCIPLINA: tecnologie e tecniche di installazione e manutenzione PIANO DELLE
Operatore dell abbigliamento. Standard della Figura nazionale
 Operatore dell abbigliamento Standard della Figura nazionale Denominazione della figura OPERATORE DELL ABBIGLIAMENTO Referenziazioni della figura Professioni NUP/ISTAT correlate Attività economiche di
Operatore dell abbigliamento Standard della Figura nazionale Denominazione della figura OPERATORE DELL ABBIGLIAMENTO Referenziazioni della figura Professioni NUP/ISTAT correlate Attività economiche di
PROGRAMMAZIONE DI T.T.I.M. CLASSE IV. Opzione Manutentore Impianti Elettrici e Domotici
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE ) CLASSE IV Opzione Manutentore Impianti Elettrici e Domotici 1 0 SICUREZZA Normativa fondamentale sulla sicurezza
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE ) CLASSE IV Opzione Manutentore Impianti Elettrici e Domotici 1 0 SICUREZZA Normativa fondamentale sulla sicurezza
installatore, gestore e manutentore di piccoli impianti fotovoltaici
 matrice EQF del installatore, gestore e manutentore di piccoli impianti fotovoltaici Questa scheda riguarda il percorso di formazione di conoscenze, abilità e competenze utili alla messa in opera, gestione
matrice EQF del installatore, gestore e manutentore di piccoli impianti fotovoltaici Questa scheda riguarda il percorso di formazione di conoscenze, abilità e competenze utili alla messa in opera, gestione
GLI APPARATI PER L INTERCONNESSIONE DI RETI LOCALI 1. Il Repeater 2. L Hub 2. Il Bridge 4. Lo Switch 4. Router 6
 GLI APPARATI PER L INTERCONNESSIONE DI RETI LOCALI 1 Il Repeater 2 L Hub 2 Il Bridge 4 Lo Switch 4 Router 6 Gli apparati per l interconnessione di reti locali Distinguiamo i seguenti tipi di apparati:
GLI APPARATI PER L INTERCONNESSIONE DI RETI LOCALI 1 Il Repeater 2 L Hub 2 Il Bridge 4 Lo Switch 4 Router 6 Gli apparati per l interconnessione di reti locali Distinguiamo i seguenti tipi di apparati:
BART SIMPSON!! Caratterizzazione e analisi segnali multidimensionali. Classificazione supervisionata. Biometria: riconoscimento impronte digitali
 Ingegneria g Elettronica e delle Telecomunicazioni Orientamento Caratterizzazione e analisi segnali multidimensionali Classificazione supervisionata Biometria: riconoscimento impronte digitali Riconoscimento
Ingegneria g Elettronica e delle Telecomunicazioni Orientamento Caratterizzazione e analisi segnali multidimensionali Classificazione supervisionata Biometria: riconoscimento impronte digitali Riconoscimento
Corso di formazione TEORICO/PRATICO per Operatori Addetti alla conduzione di piattaforme di lavoro mobili elevabili (PLE)
") Per il lavoro in quotaatt. 01 - Corso di formazione TEORICO/PRATICO per Operatori Addetti alla conduzione di piattaforme di lavoro mobili elevabili (PLE) con stabilizzatori e senza stabilizzatori ai sensi
Per il lavoro in quotaatt. 01 - Corso di formazione TEORICO/PRATICO per Operatori Addetti alla conduzione di piattaforme di lavoro mobili elevabili (PLE) con stabilizzatori e senza stabilizzatori ai sensi
Operatore macchine a controllo numerico
 identificativo scheda: 08-005 stato scheda: Validata Descrizione sintetica L esegue la lavorazione di pezzi meccanici utilizzando macchine a controllo numerico, in conformità con i disegni di riferimento
identificativo scheda: 08-005 stato scheda: Validata Descrizione sintetica L esegue la lavorazione di pezzi meccanici utilizzando macchine a controllo numerico, in conformità con i disegni di riferimento
Tecniche di riconoscimento statistico
 On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 4 Reti neurali per la classificazione Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com
On AIR s.r.l. Tecniche di riconoscimento statistico Applicazioni alla lettura automatica di testi (OCR) Parte 4 Reti neurali per la classificazione Ennio Ottaviani On AIR srl ennio.ottaviani@onairweb.com
Qualificazione dell installatore, gestore e manutentore di piccoli impianti fotovoltaici: Livello 4
 Qualificazione dell installatore, gestore e manutentore di piccoli impianti fotovoltaici: Livello 4 REQUISITI MINIMI DI ACCESSO E CORSI E LEARNING/VIDEO LEZIONI DISPONIBILI CONOSCENZE CONTENUTI FORMATIVI
Qualificazione dell installatore, gestore e manutentore di piccoli impianti fotovoltaici: Livello 4 REQUISITI MINIMI DI ACCESSO E CORSI E LEARNING/VIDEO LEZIONI DISPONIBILI CONOSCENZE CONTENUTI FORMATIVI
In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi
 Capitolo 2 Controllo Cooperativo In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi intelligenti per gli Unmanned Aerial Vehicles (UAVs), cioè velivoli senza equipaggio
Capitolo 2 Controllo Cooperativo In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi intelligenti per gli Unmanned Aerial Vehicles (UAVs), cioè velivoli senza equipaggio
THEME Matrice di Competenza - Meccatronica
 AREE DI COMPETENZA FASI DELLO SVILUPPO DELLE COMPETENZE 1. Effettuare la manutenzione e garantire l'affidabilità dei sistemi. svolgere le operazioni di manutenzione programmata di base su macchine e sistemi
AREE DI COMPETENZA FASI DELLO SVILUPPO DELLE COMPETENZE 1. Effettuare la manutenzione e garantire l'affidabilità dei sistemi. svolgere le operazioni di manutenzione programmata di base su macchine e sistemi
Luigi Piroddi piroddi@elet.polimi.it
 Automazione industriale dispense del corso 2. Introduzione al controllo logico Luigi Piroddi piroddi@elet.polimi.it Modello CIM Un moderno sistema di produzione è conforme al modello CIM (Computer Integrated
Automazione industriale dispense del corso 2. Introduzione al controllo logico Luigi Piroddi piroddi@elet.polimi.it Modello CIM Un moderno sistema di produzione è conforme al modello CIM (Computer Integrated
MECCANICA DELLE MACCHINE
 UNIVERSITA POLITECNICA DELLE MARCHE Incontro U to A 4 Marzo 2011 MDM GRUPPO DI MECCANICA DELLE MACCHINE www.dipmec.univpm.it/meccanica MECCANICA APPLICATA ALLE MACCHINE PROGETTAZIONE MECCANICA FUNZIONALE
UNIVERSITA POLITECNICA DELLE MARCHE Incontro U to A 4 Marzo 2011 MDM GRUPPO DI MECCANICA DELLE MACCHINE www.dipmec.univpm.it/meccanica MECCANICA APPLICATA ALLE MACCHINE PROGETTAZIONE MECCANICA FUNZIONALE
TECNICHE DI SIMULAZIONE
 TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
AREA PROFESSIONALE DI RIFERIMENTO. Nomenclatura delle Unità Professionali (NUP/ISTAT):
:") AREA PROFESSIONALE DI RIFERIMENTO Denominazione della figura 10. OPERATORE DEL LEGNO Referenziazioni della figura Nomenclatura delle Unità Professionali (NUP/ISTAT): 6. Artigiani, operai specializzati
AREA PROFESSIONALE DI RIFERIMENTO Denominazione della figura 10. OPERATORE DEL LEGNO Referenziazioni della figura Nomenclatura delle Unità Professionali (NUP/ISTAT): 6. Artigiani, operai specializzati
STRUMENTO DI AUTOVALUTAZIONE MONTAGGIO ARREDO
 STRUMENTO DI AUTOVALUTAZIONE MONTAGGIO ARREDO FIGURA 1 Assemblatore ed installatore di elementi di arredo e falegnameria COMPETENZA GENERALE Essere in grado di assemblare elementi di arredo e falegnameria,
STRUMENTO DI AUTOVALUTAZIONE MONTAGGIO ARREDO FIGURA 1 Assemblatore ed installatore di elementi di arredo e falegnameria COMPETENZA GENERALE Essere in grado di assemblare elementi di arredo e falegnameria,
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
All interno del computer si possono individuare 5 componenti principali: SCHEDA MADRE. MICROPROCESSORE che contiene la CPU MEMORIA RAM MEMORIA ROM
 Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
Operatore. delle calzature Standard della Figura nazionale
 Operatore delle calzature Standard della Figura nazionale 7 Denominazione della figura Referenziazioni della figura Professioni NUP/ISTAT correlate OPERATORE DELLE CALZATURE 6. Artigiani, operai specializzati
Operatore delle calzature Standard della Figura nazionale 7 Denominazione della figura Referenziazioni della figura Professioni NUP/ISTAT correlate OPERATORE DELLE CALZATURE 6. Artigiani, operai specializzati
IL MINISTRO DEL LAVORO E DELLE POLITICHE SOCIALI di concerto con IL MINISTRO DELLA SALUTE
 Decreto del Ministero dell interno 4 febbraio 2011 Definizione dei criteri per il rilascio delle autorizzazioni di cui all art. 82, comma 2, del D.Lgs. 09/04/2008, n. 81, e successive modifiche ed integrazioni.
Decreto del Ministero dell interno 4 febbraio 2011 Definizione dei criteri per il rilascio delle autorizzazioni di cui all art. 82, comma 2, del D.Lgs. 09/04/2008, n. 81, e successive modifiche ed integrazioni.
2.4.16 Isola robotizzata D.Lgs. 81/08 All. V e VI, DPR 459/96 All. I, UNI EN ISO 10218:2006
 2.4.16 Isola robotizzata D.Lgs. 81/08 All. V e VI, DPR 459/96 All. I, UNI EN ISO 10218:2006 Macchina o insieme di macchine asservite nella manipolazione del materiale o nell esecuzione delle lavorazioni
2.4.16 Isola robotizzata D.Lgs. 81/08 All. V e VI, DPR 459/96 All. I, UNI EN ISO 10218:2006 Macchina o insieme di macchine asservite nella manipolazione del materiale o nell esecuzione delle lavorazioni
MODULO PREREQUISITI OBIETTIVI CONTENUTI ORE
 1 POTENZA ED ENERGIA Conoscenze di fisica del primo biennio biennio Lettura di schemi elettrici di potenza e di comando per impianti industriali Uso di internet per ricerca materiali e cataloghi. Concetto
1 POTENZA ED ENERGIA Conoscenze di fisica del primo biennio biennio Lettura di schemi elettrici di potenza e di comando per impianti industriali Uso di internet per ricerca materiali e cataloghi. Concetto
UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA. Corso di AUTOMAZIONE INDUSTRIALE
 UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA Corso di AUTOMAZIONE INDUSTRIALE Prof. Andrea Cataldo andrea.cataldo@itia.cnr.it ARGOMENTI delle ESERCITAZIONI CONTROLLO NUMERICO in AULA CONTROLLO
UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA Corso di AUTOMAZIONE INDUSTRIALE Prof. Andrea Cataldo andrea.cataldo@itia.cnr.it ARGOMENTI delle ESERCITAZIONI CONTROLLO NUMERICO in AULA CONTROLLO
Requisiti di sicurezza per i dispositivi di protezione immateriali presenti sulle presse (barriere fotoelettriche)
") Requisiti di sicurezza per i dispositivi di protezione immateriali presenti sulle presse (barriere fotoelettriche) Fig. 1 Lavoro manuale su una pressa con barriera fotoelettrica e riparo fisso laterale.
Requisiti di sicurezza per i dispositivi di protezione immateriali presenti sulle presse (barriere fotoelettriche) Fig. 1 Lavoro manuale su una pressa con barriera fotoelettrica e riparo fisso laterale.
Ministero dell istruzione, dell università e della ricerca. Liceo Tecnologico. Indirizzo Logistica e Trasporti
 Ministero dell istruzione, dell università e della ricerca Liceo Tecnologico Indicazioni nazionali per i Piani di Studio Personalizzati Obiettivi Specifici di Apprendimento Allegato_C8-LT-08-Logistica
Ministero dell istruzione, dell università e della ricerca Liceo Tecnologico Indicazioni nazionali per i Piani di Studio Personalizzati Obiettivi Specifici di Apprendimento Allegato_C8-LT-08-Logistica
CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO. Programma d'esame. Temi d'esame proposti in precedenti concorsi
 CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Programma d'esame CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Temi d'esame proposti in precedenti concorsi CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO
CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Programma d'esame CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Temi d'esame proposti in precedenti concorsi CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO
Liceo Tecnologico. Indirizzo Logistica e Trasporti. Indicazioni nazionali per Piani di Studi Personalizzati
 Indicazioni nazionali per Piani di Studi Personalizzati Discipline con attività di laboratorio 3 4 5 Sistemi di trasporti 132 132 132 Tecnologie informatiche, dell automazione e della comunicazione 66
Indicazioni nazionali per Piani di Studi Personalizzati Discipline con attività di laboratorio 3 4 5 Sistemi di trasporti 132 132 132 Tecnologie informatiche, dell automazione e della comunicazione 66
Disegno di Macchine. Lezione n 7 Componentistica di base: alberi. corso per I anno della laurea in ing. meccanica Docente: ing.
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 7 Componentistica di base: alberi Introduzione ai componenti di macchine I componenti meccanici
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 7 Componentistica di base: alberi Introduzione ai componenti di macchine I componenti meccanici
Istituto Tecnico G.Galilei Livorno
 IL FUTURO: i quadri orari e le 4 specializzazioni della riforma PRIMO BIENNIO Il primo biennio del nostro istituto è dedicato all acquisizione di saperi e competenze di base ed ha valore orientativo e
IL FUTURO: i quadri orari e le 4 specializzazioni della riforma PRIMO BIENNIO Il primo biennio del nostro istituto è dedicato all acquisizione di saperi e competenze di base ed ha valore orientativo e
CENTRO DI TAGLIO SC 55
 CENTRO DI TAGLIO SC 55 SC 55 Centro di taglio Centro di taglio CNC a 2 assi controllati, studiato per il taglio di profili in PVC. La macchina esegue le operazioni di carico profilo dal magazzino barre,
CENTRO DI TAGLIO SC 55 SC 55 Centro di taglio Centro di taglio CNC a 2 assi controllati, studiato per il taglio di profili in PVC. La macchina esegue le operazioni di carico profilo dal magazzino barre,
PROGRAMMAZIONE DIDATTICA ANNUALE DOCENTI
 ISS IPSIA SILVIO CECCATO di MONTECCHIO MAGGIORE ( VI ) classe QUINTA A e B PROGRAMMAZIONE DIDATTICA ANNUALE DOCENTI Anno scolastico 2015/16 Materia: LABORATORI TECNOLOGICI ED ESERCITAZIONI Indirizzo :
ISS IPSIA SILVIO CECCATO di MONTECCHIO MAGGIORE ( VI ) classe QUINTA A e B PROGRAMMAZIONE DIDATTICA ANNUALE DOCENTI Anno scolastico 2015/16 Materia: LABORATORI TECNOLOGICI ED ESERCITAZIONI Indirizzo :
AREA PROFESSIONALE DI RIFERIMENTO 9. TECNICO PER L AUTOMAZIONE INDUSTRIALE. Nomenclatura delle Unità Professioni (NUP/ISTAT):
:") AREA PROFESSIONALE DI RIFERIMENTO Denominazione della figura 9. TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Nomenclatura delle Unità Professioni (NUP/ISTAT): 6. Artigiani, operai
AREA PROFESSIONALE DI RIFERIMENTO Denominazione della figura 9. TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Nomenclatura delle Unità Professioni (NUP/ISTAT): 6. Artigiani, operai
DIPARTIMENTO DI STUDI UMANISTICI
 DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA