INGEGNERIA DEI SISTEMI IDRAULICI E TRASPORTO. Tecnologie dei sistemi di trasporto. Trazione Elettrica. Corso di. Prof.
|
|
|
- Celia Perini
- 8 anni fa
- Visualizzazioni
Transcript

1 INGEGNERIA DEI SISTEMI IDRAULICI E TRASPORTO Corso di Tecnologie dei sistemi di trasporto Prof. Francesca Pagliara Trazione Elettrica Prof. Francesco Murolo
2 Propulsione Trazione Trazione elettrica Mezzi di trazione con motori elettrici Regolazione di velocità dei motori elettrici 2
3 Propulsione 3
4 Propulsione: definizione Propulsione spinta in avanti sistema di propulsione esistenza di una forza capace di imprimere il moto ad un corpo utilizzando la sua reazione d inerzia per cui questo può essere spinto in una determinata direzione vincendo la resistenza al moto e fornendo l accelerazione desiderata Il mezzo che riceve spinta in avanti è detto veicolo. 4
5 Propulsione: le funzioni fondamentali Funzioni fondamentali relative al moto dei veicoli Sostentazione Contatto verticale tra veicolo e superficie su cui il veicolo si muove e traferisce il suo peso Propulsione (Sistema di propulsione) Trasforma un energia di qualsiasi tipo in energia di traslazione ovvero necessaria per la spinta Guida Modo in cui si determina la traiettoria del veicolo ed è assicurata la stabilità laterale del veicolo stesso libera vincolata 5
6 Propulsione: il sistema di propulsione Riferendoci a veicoli dotati di motore, il sistema di propulsione (chiamato anche sistema moto propulsore) è formato da: un motore: trasforma energia di diversa natura in energia meccanica; una trasmissione: trasmette l energia meccanica dal motore al propulsore; un propulsore: trasforma l energia meccanica prodotta dal motore in energia di traslazione per il veicolo. Il sistema di propulsione Motore Trasmissione Propulsore 6
7 Il sistema di propulsione: il propulsore (tipi) R M D/2 O F RUOTA MOTRICE -F O P a A RISUCCHIO SCIA v 1 +?v D E D M SPINTA ELICA A A a GETTO o REAZIONE T P b DIRETTA B B 7
8 Il sistema di propulsione: il propulsore (tipi) Propulsore Ruota motrice Elica (traente o spingente) Getto o reazione diretta Fenomeno dell aderenza sulla ruota (motrice) a cui è applicata una coppia motrice Fenomeno di reazione dovuto alla variazione della quantità di moto del fluido in cui è immerso il velicolo Si realizza con scarico ad alta velocità di un fluido in un altro fluido in direzione contraria a quello del moto Trasporto terrestre Trasporto terrestre Trasporto navale e aereo Trasporto terrestre Trasporto navale e aereo o missilistico Coppia cinemantica Ruota Rotaia Ruota Strada ordinaria Solido fluido Fluido fluido Nel caso del getto, il motore coincide con il propulsore. 8
9 Trazione Propulsione terrestre trasporto terrestre 9
10 Trasporto terrestre Trazione spinta in avanti sistema di trazione per i veicoli terrestri, trazione è sinonimo di propulsione Il veicolo che riceve spinta in avanti è detto mezzo di trazione quando è dotato di motore I veicoli dotati di motore nel trasporto a guida vincolata sono: locomotori; automotori. Senza motore: veicoli rimorchiati. 10
11 Trazione: i veicoli Veicoli terrestri Il mezzo di sostentazione più diffuso è la ruota Strada ferrata Strada ordinaria Sistema moto propulsore (fenomeno dell aderenza) Motore a c.i. Motore elettrico Ruota MOTRICE di acciaio Motore a c.i. Motore elettrico Ruota MOTRICE di gomma Sostentazione Ruota di acciaio (portante e motrice) Ruota di gomma (portante e motrice) Guida Guida vincolata Guida libera Moto della traiettoria unidirezionale Moto della traiettoria bidirezionale 11
12 Trazione: le funzioni fondamentali Sostentazione Veicoli convenzionali : Ruota in gomma su pavimentazione stradale. Ruota in acciaio su rotaia in acciaio. Sistema di propulsione Motore Trasmissione Ruote motrici Guida Libera: la traiettoria è scelta dal guidatore, la stabilità laterale è assicurata dall aderenza trasversale. Vincolata: la traiettoria e la stabilità laterale sono assicurate dalla interazione bordino della ruota rotaia. 12
13 Trazione: il sistema di trazione Un sistema di trazione in generale fa riferimento al tipo di motore di trazione utilizzato o dal veicolo stradale o dal mezzo di trazione ferroviario. In realtà i diversi sistemi di trazione possono essere associati alle diverse infrastrutture di trasporto. Inizialmente in ferrovia la trazione a vapore era la sola utilizzata, successivamente si utilizzò anche la trazione elettrica, diesel e diesel-elettrica. La sola trazione elettrica richiede impianti di alimentazione (sottostazioni SSE e linea aerea TE). Quando l energia è prodotta a bordo del mezzo di trazione si parla di trazione diesel-elettrica. La trazione stradale utilizza motori a combustione interna (a benzina, a gasolio, a benzina-gpl e benzina-metano); recentemente vengono anche utilizzati motori ibridi (a combustione interna-elettrici) e motori innovativi (elettrici, ad idrogeno, ecc.). 13
14 Trazione: il propulsore Il propulsore più utilizzato nel trasporto terrestre è la ruota motrice. L azione di una coppia motrice M, applicata ad un asse di un veicolo, sulla cui estremità sia calettata una ruota, corrisponde a quella esercitate da una forza F, applicata tangenzialmente alla ruota nel punto di contatto con la strada. Le forze attive tangenziali F e il carico verticale P a si trasmettono fra ruota e strada attraverso l'area d'impronta (pochi cm 2 ). Si dice che si verificano le condizioni di aderenza per una ruota soggetta al peso P a ed alla forza tangenziale F se R M O r a a F M F r A f P R F A essa rotola senza strisciare o slittare. -F O P a A 14
15 Trasporto terrestre: il fenomeno dell aderenza Aumentando il valore di F il rotolamento continua finché si raggiunge il limite di aderenza A oltre il quale l aderenza cessa e la ruota comincia a slittare. Si definisce coefficiente di aderenza il rapporto: f a =A/P a Perché si abbia aderenza deve quindi essere soddisfatta la condizione: F A=f a P a Il limite di aderenza A=f a P a rappresenta, quindi, il massimo valore della forza di trazione F che può essere trasmesso da una ruota alla pavimentazione affinché il moto si svolga in condizioni di puro rotolamento. La condizione di aderenza deve essere verificata anche in frenatura ovvero la ruota rotola senza pattinare. 15
16 Trazione: l equazione generale del moto I motivi per i quali la relazione F f a P a potrebbe non essere soddisfatta sono molteplici, coinvolgono le tre grandezze in gioco (F, f a e P a ) e non sono sempre di facile individuazione quantitativa. Un parametro che nella letteratura sembra che abbia una certa influenza sul coefficiente di aderenza f a è la velocità del mezzo di trazione, nel senso che questo viene considerato decrescente con l'aumentare della velocità. Esistono anche espressioni analitiche, di tipo empirico che esprimono tale variabilità. In realtà, il coefficiente di aderenza dovrebbe ritenersi invariabile o quasi con la velocità, mentre ciò che varia con la velocità è il peso aderente di un asse, che non corrisponde sempre al peso reale gravante sull'asse, quando esso e fermo. 16
17 Caso ferroviario - Coefficiente di aderenza Valori massimi del coefficiente di aderenza nel campo ferroviario Coppia motrice uniforme, binario asciutto, getto di sabbia 1/2,5 = 0,40. Coppia motrice uniforme, binario asciutto o bagnato e pulito 1/3 = 0,33. Coppia motrice quasi costante e binario come sopra 1/4 = 0,25. Coppia motrice di macchine a vapore e binario come sopra 1/4,5 = 0,22. Binario bagnato e trazione a vapore 1/7 = 0,14. Binario con brina e trazione a vapore 1/8 =0,12. Binario umido sporco e trazione a vapore 1/9 = 0,11. Binario ingrassato e trazione a vapore 1/10 = 0,10. Binario ingombro di foglie secche e trazione a vapore 1/125= 0,08. I valori da 5 a 9 aumentano del 15-20% per trazione elettrica. 17
18 Trazione: l equazione generale del moto L equazione generale del moto di un veicolo isolato si scrive: F-R=M s a=m dv/dt Dove M s rappresenta la massa statica P/g. Per tenere anche conto delle masse rotanti, si maggiora il valore della massa M introducendo il concetto di massa equivalente: M e = (1+β)M>M. Il coefficiente β (0,1 0,2) tiene conto di tutte le masse rotanti: ruote, pistoni, alberi, del cambio e volano oppure rotori. Quindi: F-R=M e dv/dt F = somma di tutte le forze attive (motrici o frenanti) applicate al veicolo. R = somma di tutte le resistenze applicate al veicolo. M e = massa equivalente del veicolo. dv/dt = accelerazione (con v velocità nella direzione del moto). 18
19 Trazione: il fenomeno dell aderenza Nello studio del moto dei veicoli devono sostanzialmente essere considerate le seguenti forze: le forze attive F aventi la stessa direzione del vettore velocità v con cui il mezzo si sposta, mentre il verso é lo stesso o l opposto a seconda che si tratti di forze di trazione o di frenatura; le forze passive o resistenze R aventi la stessa direzione della velocità e verso opposto; le forze d inerzia M e a. Le forze attive possono a loro volta avere il verso del vettore v se sono motrici (forze di trazione), oppure verso opposto se sono resistenti (forze frenanti). 19
20 Trazione: le resistenze al moto La resistenza R all avanzamento può essere considerata come somma di più addendi: R = R pr + R a [kg] Le resistenze in piano e rettilineo, o rettifilo, R pr dipendono esclusivamente dalle caratteristiche costruttive del veicolo, mentre quelle addizionali, o accidentali, R a dipendono solo dalle caratteristiche costruttive della strada ordinaria o ferrata. Resistenze in piano e rettilineo R PR R A Resistenze addizionali R PRr R PRa R Ac R Ap Resistenze al rotolamento Resistenze dovute all aria Resistenze dovute alle curve Resistenze dovute alla pendenza COPPIA PERNO-CUSCINETTO: Attrito nei fuselli delle sale montate. COPPIA RUOTA-ROTAIA: - Deformazione ruota-rotaia; - Deformazione piano di appoggio; - Serpeggiamento; - Urti. - Pressione frontale; - Azione laterale; - Depressione nella parte terminale. - Solidarietà delle ruote con l asse; R - Parallelismo delle sale di un carrello; - urti tra i bordini. G 20
21 Trazione: le resistenze al moto La resistenza R indica il valore assoluto delle resistenze. La resistenza r indica il valore unitario delle resistenze. Resistenze in piano e rettilineo o rettifilo r PR = b+c v 2 [kg/tonn] b=18 20 [kg/tonn] su strada ordinaria b=2,5 [kg/tonn] su strada ferrata c=0,001 0,04 v [m/s]. Resistenze addizionali o accidentali r A = i + ρ [kg/tonn] i = resistenza dovuta alle pendenze [ ] ρ = C/R resistenza dovuta alle curve [kg/tonn] Resistenza complessiva R [kg] = (b+c v 2 + i + ρ) M s 21
22 Trazione: la resistenza d inerzia 22
23 Trazione: considerazioni 23
24 Caratteristica ideale per la trazione La forza (o sforzo) di trazione F è la forza che applicata alle ruote del veicolo, è in grado di farlo muovere e mantenerlo in movimento alle diverse velocità nelle diverse condizioni di marcia. Poiché la resistenza R si oppone al moto la forza di trazione per mantenere il veicolo alla velocità richiesta deve essere pari alla resistenza. F = R (a regime) La forza di trazione che deve inoltre consentire il raggiungimento della velocità massima partendo da fermo pertanto essa deve essere definita in tutto il campo di velocità da 0 a V max e in questo campo deve avere un valore sempre superiore alla resistenza al moto per fornire al veicolo la forza necessaria a vincere anche la resistenza dovuta all inerzia (forza d inerzia o resistenza d inezia) F = M e a (all avviamento) 24
25 Caratteristica ideale per la trazione Ciò si può ottenere ad esempio con una caratteristica meccanica F(v) di tipo iperbolico (P=F v=costante) che fornisca alla velocità massima v max una forza pari alla resistenza al moto F=R max. F F(v) forza acceleratrice M a R(v) A velocità inferiori a quella massima v max la forza F è senz altro superiore alla resistenza R per cui la differenza rispetto a quest ultima è disponibile per variare la velocità con una determinata accelerazione a. 0 v max v 25
26 LIMITE DI VELOCITÀ Caratteristica ideale per la trazione La caratteristica iperbolica tende a fornire valori molto elevati della forza a basse velocità: se fosse perfettamente iperbolica a velocità nulla darebbe un valore infinito. Tali valori non possono essere utilizzati se non sono compatibili con l aderenza disponibile al contatto ruota rotaia. Quindi la forza di trazione non deve superare quella di aderenza, altrimenti la ruota slitta e non vi è avanzamento. F LIMITE DI ADERENZA Inoltre, la forza di trazione non deve superare neanche una certa velocità altrimenti ci sarebbe la rottura degli organi in moto del mezzo di trazione. v 26
27 Caratteristica ideale per la trazione Poiché il tempo necessario per raggiungere la velocità v max dipende dall accelerazione per ridurre al minimo tale tempo l accelerazione dovrebbe essere la più elevata possibile. Ciò si può ottenere solo se si adottano caratteristiche che forniscano a pari velocità valori più elevati della forza di trazione. F, R P 1 P max P max >P 1 >P 0 P 0 POTENZA COSTANTE F max SFORZO COSTANTE sforzo acceleratore M a R RESISTENZE AL MOTO 0 v max v 27
28 Caratteristica ideale per la trazione Se si volesse ridurre al minimo il tempo necessario a raggiungere la velocità massima v max la forza di trazione F dovrebbe mantenersi costante e pari a quella massima trasmissibile F max con l aderenza nel campo di velocità che va da 0 a v max e poi ridursi fino ad uguagliare la resistenza R max. La potenza utilizzata aumenterebbe proporzionalmente con la velocità da zero alla potenza massima, in corrispondenza della velocità massima e poi si ridurrebbe fino a quella necessaria per garantire la velocità massima. F, R, P F, R, P F, R, P F max F max P 1 P max F max P 0 R R R 0 v max v 0 v max v 0 v max v 28
29 Caratteristica ideale per la trazione Maggiore è la potenza di dimensionamento, maggiore può essere la zona a sforzo costante. Ovvero il valore di v 1 si sposta verso destra. Le massime prestazioni si ottengono quando lo sforzo di trazione è sempre costante fino alla velocità massima. Questo però, richiederebbe una potenza di dimensionamento elevatissima e sfruttabile solo per la fase di avviamento. F, P, R Potenza crescente POTENZA COSTANTE Limite di aderenza F Servizi metropolitani F max SFORZO COSTANTE P max = F max v max Servizi ferroviari RESISTENZE AL MOTO v max v v 29
30 Caratteristica ideale per la trazione Una volta fissata la potenza massima del mezzo di trazione, si può definire il dominio (F, v) delimitato da due confini: Limite di aderenza: lo sforzo di trazione non deve superare quello di aderenza altrimenti la ruota (motrice) slitta. Cosa analoga succede in frenatura (pattinamento). Limite di velocità: lo sforzo di trazione non deve superare una certa velocità altrimenti ci sarebbe la rottura degli organi in moto del mezzo di trazione. F LIMITE DI ADERENZA LIMITE DI POTENZA F,P F max P max DOMINIO DI REGOLAZIONE LIMITE DI VELOCITÀ SFORZO COSTANTE POTENZA COSTANTE v v 30
31 Trazione: i motori di trazione Ogni motore di trazione ha una sua caratteristica meccanica: è un diagramma che lega due grandezze meccaniche (coppia C - velocità angolare ω, o potenza P - velocità angolare ω). Le caratteristiche meccaniche dei motori di trazione si avvicinano a tre caratteristiche teoriche tipo a P costante, a C costante o a ω costante: Coppia costante Potenza costante Velocità costante P,C P,C P,C C P C P P C Motore a combustione interna ω ω ω Motore elettrico 31
32 Caratteristiche meccaniche dei motori di trazione kn II I IV III I II III IV V VI motore ideale a vapore elettrico c.c. elettrico c.a. monofase elettrico c.a. trifase a combustione interna V VI Raffronto fra le curve caratteristiche meccaniche dei motori di trazione principalmente usati km/h 32
33 Passaggio alla caratteristica meccanica dei motori Nel passaggio tra la caratteristica meccanica del mezzo di trazione a quella del motore bisogna tener conto del rapporto di riduzione e dei vari rendimenti. Motore C,n Trasmissione t v Ruote motrici F,v max 2 n 60 1 r max Cmax Fmax t r [rad/s]; D[m]; n [giri/min]; v [m/s] M M 33
34 Passaggio alla caratteristica meccanica dei motori In questo caso si può passare dalla caratteristica meccanica mezzo di trazione (F, v) a quello del motore (C, ω). Caratteristica meccanica C F C M P M F M P M ωm ω v M v Caratteristica meccanica del motore Caratteristica meccanica del mezzo di trazione C,ω F,v 34
35 Passaggio alla caratteristica meccanica dei motori telaio del carrello sospensione a naso albero motore motore di trazione Motore di trazione Ruota motrice? r assile cuscinetto ruota dentata cerchione Motore di trazione D p D r D? M MOTORE TRASMISSIONE RUOTA C, n F, v 35
36 Trazione elettrica Il sistema di trazione a) propulsore (ruota motrice) b) azionamento elettrico I. motore elettrico II. sistema di regolazione (convertitore) 36
37 Trazione elettrica Quando il motore di trazione è quello elettrico si parla di trazione elettrica. Sistema di alimentazione Alimentazione Motore (più apparato di regolazione: azionamento) Regolazione Motore elettrico Propulsore Sistema di Propulsione (di Trazione) 37
38 Trazione elettrica: l azionamento elettrico La dizione trazione elettrica si riferisce perciò a quei veicoli il cui moto avviene per l azione di uno o più motori elettrici o più correttamente per mezzo di azionamenti elettrici di trazione che consentono la regolazione dei motori. L'azionamento elettrico è un sistema che converte l'energia elettrica che riceve in ingresso, in energia meccanica in uscita. Energia Elettrica Convertitore Motore Energia Meccanica Schema elementare di azionamento elettrico Con il termine convertitore si intende sia un apparato di regolazione tradizionale ovvero con apparecchiature elettromeccaniche e sia un apparato elettronico ovvero con convertitori statici. 38
39 Trazione elettrica: l azionamento elettrico Per quanto riguarda la funzione del motore elettrico si parla di azionamento elettrico in: corrente continua; corrente alternata. Invece sulla base delle prestazioni, gli azionamenti elettrici sono in grado di fornire una: regolazione discreta; regolazione fine. Senza l elettronica di potenza la regolazione è sicuramente discreta: è possibile avere una numero finito di caratteristiche meccaniche (regolazione tradizionale). Con l elettronica di potenza si ottiene un azionamento con regolazione fine: numero infinito di caratteristiche meccaniche (dominio: regolazione elettronica). 39
40 Trazione elettrica: il sistema di trazione La fornitura a bordo di energia elettrica per l alimentazione dell azionamento avviene: a spese di un sistema di accumulo (veicolo elettrico puro); per generazione diretta da sorgenti locali (veicolo ibrido, dieselelettrico); per assorbimento da linea di contatto, cioè il motore riceve energia con una trasmissione a distanza dal luogo di produzione dell energia elettrica stessa (veicoli elettrici con captazione). Nei primi due casi la trazione elettrica riguarda unicamente il mezzo in movimento, nel terzo anche il sistema di distribuzione e di alimentazione e dunque l intero impianto e/o sistema di trazione. 40
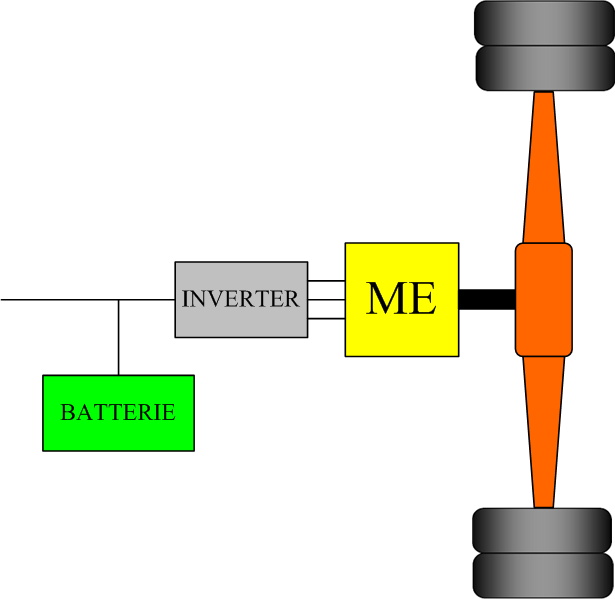
41 Trazione elettrica: il sistema di trazione Senza captazione: veicolo elettrico puro Equipaggiamento di trazione (apparecchiature di regolazione) Sistema di alimentazione (batterie) Motore elettrico veicolo Senza captazione: veicolo diesel elettrico Equipaggiamento di trazione (apparecchiature di regolazione) Motore diesel Generatore elettrico (alternatore) Motore elettrico veicolo Sistema di alimentazione 41
42 Trazione elettrica: il sistema di trazione Senza captazione: veicolo ibrido serie batterie Equipaggiamento di trazione (apparecchiature di regolazione) Generatore elettrico (alternatore) Motore diesel Motore elettrico veicolo Sistema di alimentazione Senza captazione: veicolo ibrido parallelo Batterie e/o Fuel Cell Equipaggiamento di trazione (apparecchiature di regolazione) Sistemi di alimentazione Generatore elettrico (alternatore) Motore diesel Motore elettrico veicolo 42
43 Trazione elettrica: il sistema di trazione Linea aerea Con captazione Sistema di alimentazione Pantografo Equipaggiamento di trazione (apparecchiature di regolazione) veicolo Motore elettrico 43
44 Trazione elettrica: trasformazione energetica leggi sui circuiti elettrici e magnetici = Elettromagnetismo. leggi meccaniche = Meccanica. leggi elettro-meccaniche = Trasformazioni di energia elettrica in energia magnetica. leggi meccano elettriche = Trasformazioni di energia meccanica in energia elettrica. Schema semplificativo delle leggi che governano i fenomeni elettromagnetici, meccanici, elettromeccanici e meccano-elettrici Leggi elettromeccaniche F B l i Legge sui circuiti elettrici e magnetici Leggi meccaniche E V P E i f.m.m. f.e.m E R i F F R P F v Leggi meccanoelettriche E B l v 44
45 Trazione elettrica: trasformazione energetica 1. Legge fondamentale elettrica: E= ΔV dove E è la f.e.m o tensione applicata o al circuito e le ΔV rappresentano le cadute di tensione. 2. Legge fondamentale meccanica: F= F R (somma di tutte le forze resistenti). 3. Legge fondamentale elettromeccanica: F=B l i. L ipotesi fondamentale è che la macchina contenga circuiti magnetici. Ci interessano le forze che sono esercitate su di un conduttore percorso da corrente e immerso in un campo magnetico. È la relazione che trasforma la potenza E I elettrica nella corrispondente F v del campo meccanico. 4. Legge fondamentale meccano-elettrica: E=B l v. Forza (elettromotrice f.e.m.) esercitata sulle cariche di un conduttore in moto in un campo magnetico. 45
46 Trasformazione energetica: generatore elementare Asse che trasla su due rotaie conduttrici, immerso in un campo di induzione B infinito ed uniforme. Se l asse si muove con velocità v, ai suoi estremi nasce una f.e.m. E=Blv e, se chiudo il circuito su di una resistenza R, si avrà una corrente i=e/r. Tale corrente passando nel conduttore farà nascere una forza meccanica F=Bli, quindi se si vuole che il moto del conduttore continui è necessario una potenza meccanica pari a F v; quindi si ha: F v=bli v ovvero F v=e i i In questo modo si è riuscita ad E B ottenere la trasformazione di potenza F v R meccanica in potenza elettrica. 46
47 0 Trasformazione energetica: motore elementare Lo schema è analogo. In questo caso è pero presente una batteria che fa circolare una corrente i nel circuito. Sul conduttore si esercita quindi una forza F=Bli e il conduttore si muove; questo movimento da luogo ad una f.e.m. E=Blv che ha direzione opposta alla tensione applicata. La potenza elettrica che si deve fornire, perché il conduttore continui il suo moto con velocità v, è pari a Ei. Raccogliendo le formule si ha: Vi Ei=Blvi=Fv. In questo modo si è ottenuta la trasformazione di energia elettrica in energia meccanica. Nei due casi non si è tenuto conto delle perdite (Vi Ei). i V E v B F Nella schematizzazione elementare di una macchina elettrica, avviene una trasformazione di energia meccanica in energia elettrica e viceversa. 47
48 Trazione elettrica: i motori elettrici Vantaggi della trazione elettrica Prestazione Elevata densità di potenza. Capacità di sovraccarico. Reversibilità che permette l uso della frenatura elettrica. Accelerazioni/decelerazioni elevate. Flessibilità Adattabilità alle diverse condizioni di marcia senza penalizzare il rendimento. Possibilità di sfruttare diverse fonti di energia. Varietà nella scelta dei motori (c.c., asincrono, sincrono). Economicità e compatibilità ambientale Emissioni fortemente ridotte (teoricamente nulle). Bassa rumorosità del motore elettrico. Manutenzione limitata sulla parte elettrica ed elettronica. Applicazioni ideali Trasporti urbani di massa (metro, bus elettrici) Trasporti AV di massa su medie distanza Linee in galleria (treni navetta) Trasporto urbano privato (in futuro) 48
49 Trazione elettrica: i motori elettrici Motori elettrici Usati fino ad oggi per la trazione A corrente alternata A corrente continua Asincrono Sincrono Monofase a colletore A eccitazione serie A eccitazione in drivazione Caratteristica meccanica intrinsecamente idonea per la trazione Motori elettrici Modi di alimentazione Con captazione Senza captazione Linea di contatto Veicoli senza sistema di alimentazione a bordo Veicoli diesel elettrici Veicoli elettrici puri Veicoli con sistema di alimentazione a bordo Veicoli ibridi 49
50 Trazione elettrica: i motori elettrici F,v Per un veicolo intero Caratteristica meccanica diagramma che lega due grandezze meccaniche C,ω Per un singolo motore Caratteristiche elettromeccaniche diagramma che lega una grandezza elettrica con una meccanica I, ω C,I Corrente in funzione della velocità Coppia in funzione della corrente 50
51 Trazione elettrica Mezzi di trazione con motori elettrici 51
52 Motore a collettore ad eccitazione serie in c.c. Vantaggi Caratteristica meccanica idonea all applicazione di trazione (ampia zona in cui C n=cost). Tecnologia consolidata e quindi di grande affidabilità. Buon rendimento per un ampio intervallo di carico. Presenta un ottima meccanica (resistenza a vibrazioni ed urti). Regolazione della velocità relativamente semplice. Svantaggi Ingombri e pesi considerevoli per la presenza del collettore. Manutenzione frequente soprattutto sul sistema spazzole-collettore. Rapido incremento della velocità per bassi carichi (fuga del motore). Tensioni applicabili limitate per assicurare la tenuta dell isolamento tra le lamelle del collettore. 52
53 Motore a collettore ad eccitazione serie in c.c. Sezione longitudinale del motore serie 1. Spazzole e portaspazzole 2. Lamelle 3. Testate 4. Nuclei poli eccitazione 5. Avvolgimenti di eccitazione 6. Ventilatore 7. Canale di ventilazione assiale 8. Pignone 9. Corona dentata 10. Sala montata 53
54 Motore a collettore ad eccitazione serie in c.c. 54
55 Motore a collettore ad eccitazione serie in c.c. Statore o eccitazione Indotto o armatura Spazzole e collettore Indotto o armatura: Armatura r i = r a + r pa + r ac Poli ausiliari Avv. compensatori Eccitazione: r e Indotto+eccitazione: r a r pa r ac U + i r e E M p.a. a.c. r pa r ac r a p.p. r = r i + r e 55
56 Motore a collettore ad eccitazione serie in c.c. Schema del motore serie Indotto o armatura: Armatura r i = r a + r pa + r ac Poli ausiliari Avv. compensatori Eccitazione: r e Indotto+eccitazione: r a r pa r ac U + i r e E M p.a. a.c. r pa r ac r a p.p. r = r i + r e E U E r I e E k n C k ' I equilibrio del circuito elettrico trasformazione meccanoelettrica trasformazione elettromeccanica + I M U r e r e I 56
57 Motore a collettore ad eccitazione serie in c.c. CARATTERISTICA ELETTROMECCANICA C C(n) CARATTERISTICA MECCANICA C(I) C(n)=costante I n n(i) I CARATTERISTICA ELETTROMECCANICA 57
58 Motore a collettore in c.a. Molto schematicamente possiamo rappresentare il motore come in figura, anche se in effetti, nei motori a c.a. i poli sono più numerosi. Sempre in figura si può notare, dalla disposizione spaziale degli avvolgimenti statorico e rotorico, il flusso statorico e quello rotorico (reazione di armatura). R S I s R 58
59 Motore a collettore in c.a.: circuito equivalente Il motore monofase a collettore ha caratteristiche costruttive in parte simili a quello a corrente continua; lo statore è però laminato, essendo il flusso alternato. L avvolgimento d indotto è di tipo parallelo. Avvolgimento d'indotto E Avvolgimento compensazione Avvolgimento dei poli ausiliari I M a.c. p.a. U p.p. Avvolgimento d eccitazione 59
60 Motore a collettore in c.a.: caratteristiche,i I M,I I t M t t t I I sen t M M sen t MIM M K I K cos cos 2 t 2 60
61 Motore asincrono trifase (in c.a.) Vantaggi rispetto motore c.c. Problematiche prima di utilizzo inverter Ingombro e massa ridotti a parità di potenza. Assenza di collettore e spazzole (problemi di manutenzione, limiti di corrente e velocità). Passaggio automatico da trazione a frenatura senza modifiche circuitali. Rigidità di funzionamento (poche velocità fisse di marcia in condizioni di stabilità). Complicazioni impiantistiche (linea bifilare, frequenza di alimentazione ridotta). Impiego di inverter controllati in tensione e frequenza Elevata elasticità di funzionamento grazie all ampio intervallo di regolazione della frequenza. Locomotori ad impiego universale (passeggeri, merci). Standardizzazione dei mezzi e riduzione dei costi. Inversione di marcia ottenuta modificando la sequenza di alimentazione delle fasi senza ricorrere ad apparecchiature elettromeccaniche. Avviamento ottenuto con bassi scorrimenti grazie alla regolazione della frequenza (elevate coppie di spunto, basse perdite rotoriche). Riduzione della massa dei motori e quindi del peso dei carrelli con miglioramento della qualità di marcia (M carr /M tot 40% M carr /M tot 55% con motori c.c.). 61
62 Motore asincrono trifase (in c.a.) 62
63 Confronto dimensionale motori (stessa potenza) Motore DC a collettore Motore asincrono trifase 63
64 Confronto locomotori DC e AC Traction drive of: rated power: maximum torque: maximum speed: mass (without gear): moment of inertia: E103: 1230kW at 1520 min Nm for 5 min 1600min kg 120kg m 2 E152: 1633kW at 2280 min Nm constantly 4000min kg 18,4kg m 2 Dimensions:
65 Caratteristica meccanica motore asincrono C K f C M s f C K f K 2 X 4 L R X 0 2 R2 s f 2 L C M s R R s X 2 2 C C M C Tratto instabile della caratteristica 0 n n 0 Caratteristica meccanica motore asincrono Caratteristica ideale per la trazione n s 1 s f n f 2 f f
66 Trazione elettrica Regolazione di velocità dei motori elettrici 66
67 Regolazione di velocità del motore Come accennato precedentemente, l'azionamento elettrico, in corrente continua o in corrente alternata, può fornire una regolazione del motore discreta oppure fine. Si parlerà, nel primo caso di azionamenti tradizionali, nel secondo, di azionamenti elettronici. Nell azionamento elettronico la conversione avviene in genere mediante i seguenti componenti: motori elettrici; convertitori elettronici di potenza; sensori; trasduttori; unità di controllo. Regolazione di un motore significa: a coppia costante sviluppare diverse velocità; a velocità costanti sviluppare diverse coppie. 67
68 Azionamento tradizionale in c.c.: regolazione di velocità E k n E n k U E r I E U r I n U r I k I E M U r ri Metodi di regolazione della velocità: 1. variare la tensione attraverso una resistenza aggiuntiva (regolazione reostatica); 2. variare il flusso regolando la f.m.m. di eccitazione (regolazione di campo); 3. variare la tensione di alimentazione U (regolazione di tensione: transizione serie/parallelo, chopper); 68
69 Azionamento tradizionale in c.c.: regolazione di velocità Linea di contatto 1,5-3 kv c.c. F, R Transizione serie-parallelo F M Apparecchiature di regolazione Reostato Regolazione reostatica Motore di trazione M = Motore in c.c. eccitazione serie Indebolimento di campo R F Binario v r v Linea di contatto 1,5-3 kv c.c. Linea di contatto 1,5-3 kv c.c. M = ecc. Esempio di Indebolimento di campo U IL P M 2 S1 4 6 Esempio di transizione serie-parallelo S2 M G Binario Binario 69
70 Azionamento tradizionale in c.c.: regolazione reostatica La resistenza R può essere variata cortocircuitando sequenzialmente le sezioni reostatiche r 1,..., r n tramite dei convertitori. 1. La corrente di avviamento non può essere mantenuta costante (numero eccessivo di posizioni reostatiche). 2. La corrente viene fatta variare tra valore min I B ed un valore max I A. n U ( R r) I k C (I A ) R (I B ) + I r 1 r 2 r x-1 r M - R <R R=0 I II U E n 70
71 Azionamento tradizionale in c.c.: regolazione di campo La variazione di flusso può essere ottenuta o variando con uno shunt, posto in parallelo al circuito di eccitazione, la corrente di campo, o diminuendo il numero di spire costituenti il circuito di eccitazione Poiché in entrambi i casi si ha una diminuzione delle amperspire di eccitazione e quindi del flusso induttore, l'operazione prende il nome di indebolimento di campo. U ( R r) I n k R e R e C e 1 >e 2 >e 3 I ecc R sh e 2 e 3 U M I sh I a M U e 1 Inserzione di derivatori ohmico induttivi Variazione del numero delle spire attive n 71
72 Aziona. tradizionale in c.c.: transizione serie - parallelo Con questo sistema è necessario disporre di almeno due motori che si possano connettere in serie o in parallelo. Disposti in serie sotto una certa tensione U, ai motori è applicata una tensione pari a U/2, mentre la corrente è I per entrambi. Quando vengono disposti in parallelo la tensione applicata sui motori è U, cioè si realizza un'altra caratteristica. P s = V x I P p = V x 2 I = 2 P s F I V/2 2I V M M I I M I M PARALLELO V/2 V SERIE SERIE PARALLELO v 72
73 Azionamento tradizionale in c.c.: regolazione di velocità Vediamo una sequenza di avviamento: 1. Avviamento con motori in serie ed esecuzione della regolazione reostatica e successivamente anche ad un indebolimento di campo. 2. Completamento regolazione reostatica e di campo e passaggio alla configurazione finale del circuito di trazione avente i motori in parallelo e reinserimento del reostato. 3. Completamento regolazione reostatica e di campo fino al punto di lavoro finale. 73
74 Azionamento tradizionale in c.c.: regolazione di velocità F, R e 2 e 5 F M e 3 e 6 e 1 e 4 F R Caratteristica meccanica regolata con esclusione reostatica, indebolimento di campo e transizione serie - parallelo v r v 74
75 Azionamento tradizionale in c.a. Linea di contatto 15 kv c.a. 16 2/3 Hz F e 3 e 2 e 1 e 0 Trasformatore con rapporto di trasformazione variabile M Motore in monofase a collettore F 1 Binario 0 v 1 v M v 75
76 Azionamento tradizionale Gli azionamenti tradizionali presentano due grossi svantaggi: 1. Consumo di energia e quindi il rendimento globale di trazione basso. 2. Dimensionamento del reostato di avviamento, che dovendo dissipare una quantità superiore di energia risulta più pesante, più ingombrante e più costoso; qualità che si pagano anche nel dimensionamento della locomotive stessa (maggior peso ed ingombro dell'apparecchiatura). 76
77 Azionamento tradizionale Questi problemi hanno portato negli anni passati ad un dimensionamento del motore di trazione, ne che permettesse di eliminare il reostato di avviamento nel tempo minimo compatibile con le prestazioni, richieste al veicolo; ciò richiede in particolare che la velocità di dimensionamento del motore a pieno campo corrisponda ad una velocità del veicolo relativamente bassa rispetto alla velocità massima di servizio in mode appunto che la caratteristica a piena tensione sia raggiunta in un tempo minimo. Ciò implica motori a basso numero di giri di dimensionamento e quindi di ingombro, peso e costo elevati. 77
78 Azionamento elettronico in c.c.: il chopper Il chopper è il dispositivo per la conversione corrente continua in corrente continua (c.c./c.c.). Esso è costituito da componenti elettronici (schematizzato in figura come un interruttore ideale T). Con il chopper è possibile variare con continuità il valore della tensione in uscita U 2 partendo in ingresso da un sistema di alimentazione in c.c..con un valore di U 1 fisso. I 1 = I 2 I 1 T I 2 I 1 D I 2 U 1 Lato linea = U 2 Lato motore U 1 D Abbassatore (motore) U 1 >U 2 U 2 U 1 T U 2 Elevatore (generatore) U 1 <U 2 78
79 Azionamento elettronico in c.c.: il chopper Questo sistema di regolazione è impiegato nei mezzi di trazione equipaggiati con motore in c.c. e permette di regolare, con continuità e senza dissipazioni di energia, la velocità, dall avviamento fino a regime (assenza di transizione serie/parallelo o inserzione di resistenze). Per ottenere la variazione di U 2 nell'intervallo 0 U 1, è possibile agire in due maniere distinte: variare il periodo T mantenendo costante T c (chopper a frequenza variabile) oppure variare T c con T costante (chopper a frequenza fissa). u 2 U 1 U 2 u 2 U 1 U 2 T c T c T T T b T b u 2 U 1 U 2 T c T b T T c T T b 2T 2T T c T b T 3T 3T t t t 79
80 Azionamento elettronico in c.c.: il chopper Rispetto agli equipaggiamenti tradizionali è possibile avere una regolazione continua della forza e della velocità. Il comando della marcia è molto più flessibile; è possibile infatti variare con continuità la forza di trazione di avviamento ed effettuare la marcia a velocità prefissata, regolata automaticamente. La regolazione di campo può essere usata per estendere il campo di utilizzazione ad alta velocità. Linea di contatto 1,5-3 kv c.c. F, R Apparecchiature di regolazione Chopper F M Motore di trazione M = Motore in c.c. eccitazione serie Dominio di regolazione R F Binario a coppia costante a potenza costante v 80
81 Azionamento elettronico in c.a.: l inverter La caratteristica meccanica del motore asincrono è di tipo rigida, ovvero è lontana da quella ideale per la trazione (a potenza costante) come per esempio, quella del motore a collettore ad eccitazione serie. Da quanto detto appare evidente la necessità di disporre di un dispositivo che regoli in maniera più fine possibile la tensione (V) e la frequenza (f) del motore asincrono. Ciò è stato possibile con l utilizzazione dell inverter, che ha consentito di ottenere, anche con i motori trifasi, caratteristiche meccaniche quanto mai prossime a quella ideale per la trazione. INVERTER = C CON INVERTER SENZA INVERTER Ingresso c.c. Uscita c.a. trifase Lato alimentazione 3~ Lato motore n 81
82 Azionamento elettronico in c.a.: regolazione U-f Regolazione tensione-frequenza motore asincrono U C,P,U U M C M C C M C V f n f cos t. f <f n f n 1/n 2 >f n P M U M C(n) P(n) U(n) V f decre. 0 n 1 n M n 0 n 1 n M n 82
83 ~ Azionamento elettronico in c.a. Linea di contatto 15 kv c.a. 16 2/3 Hz 25 kv c.a. 50 Hz Trasformatore riduttore Apparecchiature di regolazione Motori di trazione ~ M ~ 3 Raddrizzatore Chopper (variazione di V) Inverter (variazione di f) asincroni/ sincroni Binario Linea di contatto 1,5-3 kv c.c. F, R asincrono Appar. di regol. Motore di trazione F M ~ M ~ 3 Dominio di regolazione F Inverter asincrono/ sincrono R Binario a coppia costante a potenza costante v 83
84 Esempio: locomotore elettrico in c.c. 84
85 Esempio: locomotore elettrico in c.a. Compressone Ventole di raffreddamento Raddrizzatore principale Interruttore generale Pantografo Batterie Inverter principale Motori di raffreddamento Motori trifasi Raddrizzatore ausiliario Inverter ausiliario Trasformatore principale Spazzola 85
86 Esempio: locomotore elettrico politensione 86
87 Esempio: locomotore diesel-elettrico 87

88 Esempio: autobus ibrido 88
89 Esempio: Tram largo 2,40 metri; alto 3,30 metri (pantografo escluso); lungo 32 metri; composto da 5 unità intercomunicanti; 424kW di potenza totale; 70 km/h di velocità massima; 42 posti a sedere, più 4 attrezzati per disabili in sedia a rotelle; 160 posti in piedi (alla densità di 4 passeggeri/m 2 ); 202 passeggeri di capacità totale. 89
90 Esempio: Trolleybus 90
91 Trazione elettrica Il circuito di trazione o di alimentazione 91
92 Trazione elettrica: il circuito di trazione Come per tutti gli impianti utilizzatori dell energia elettrica, anche quello della trazione utilizza un circuito elettrico chiuso, che nel caso particolare è chiamato circuito di trazione ed è composto da una sorgente di energia, da una linea di alimentazione da un utilizzatore e da un conduttore di ritorno. Per i mezzi senza captazione, il circuito di trazione si riferisce alla parte del circuito attinente al solo veicolo stesso. Se consideriamo, invece, i mezzi con captazione, per sistema di trazione si intende il complesso linea di contatto (sorgente di energia e linea di alimentazione), elettrotreno (utilizzatore) e rotaie (conduttore di ritorno). Tipico esempio di questi sistemi è quello ferroviario. 92
93 Trazione elettrica ferroviaria Un impianto di elettrificazione o alimentazione comprende i seguenti sistemi: La produzione in centrali di energia elettrica. Il trasporto dell energia con linee in alta tensione AT. Centrale di produzione di energia elettrica Trasmissione dell energia elettrica: linee AT La trasformazione nelle sottostazioni SSE dove l energia elettrica è portata a valori di tensione adatti al sistema di trazione impiegato. La linea di contatto TE che porta l alimentazione ai veicoli. I veicoli che ricevono l energia elettrica e la trasformano in energia meccanica. Binario SSE Trasformazione dell energia elettrica Linea di contatto TE 93
94 Linee di alimentazione in AT e MT L energia elettrica viene trasmessa su linee di alimentazione in Alta Tensione AT. Sono considerate linee in AT quelle con valore di tensione pari a 66, 132, 150 e 220 kv. La maggior parte delle linee in AT hanno la funzione di trasportare l energia elettrica dalle centrali di produzione alle sottostazioni elettrice di trasformazione e smistamento. In queste sottostazioni l energia la tensione viene abbassata ad un valore di tensione che varia da 6 a 20 kv: linee in Media Tensione MT. Le linee in MT sono linee di distribuzione. Le linee di AT sono di proprietà della TERNA, mentre le maggior parte delle linee di MT sono di proprietà dell ENEL. Le linee di alimentazione ferroviarie TE sono alimentate o dalla rete di MT oppure dalla rete di AT. 94
95 Sistemi di alimentazione per la trazione I sistemi di alimentazione usati per la trazione elettrica (ferroviaria, metropolitana, tranviaria e filoviaria) per l alimentazione delle linee TE sono: 0,75 kv in corrente continua (tranviaria e filoviaria); 1,5 kv in corrente continua (ferroviaria, metropolitana); 3 kv in corrente continua (ferroviaria, metropolitana); 15 kv in corrente alternata a frequenza 16 e 2/3Hz (ferroviaria, metropolitana); 25 kv in corrente alternata a frequenza 50Hz (ferroviaria AV). 95
96 Sistemi di alimentazione per la trazione Come per i sistemi di trazione, anche per quelli di alimentazione l evoluzione è stata determinata dallo sviluppo dell elettronica di potenza (convertitori statici). Oggi la scelta del sistema di alimentazione non è più vincolante per la scelta del motore di trazione da equipaggiare su di un mezzo di trazione. La regolazione dei motori elettrici, sia quella tradizionale e sia quella con i convertitori, viene fatta variando il parametri elettrici tensione V, corrente I e frequenza f. Siccome i parametri elettrici del sistema di alimentazione sono fissi, i mezzi di trazione sono dotati di equipaggiamenti di trazione capaci di variare i parametri elettrici del motore presente a bordo del mezzo. 96
97 Sistemi di alimentazione in trazione Prima dei convertitori statici SISTEMA DI ALIMENTAZIONE SISTEMA DI TRAZIONE LINEA DI CONTATTO UNIPOLARE MOTORE A COLLETTORE ECCITAZIONE SERIE SISTEMA MONOFASE 15kV-16 2/3Hz (GERMANIA) SISTEMA 3kV c.c. (ITALIA) SISTEMA 750V-1500V c.c. (GRAN BRETAGNA-FRANCIA) 97
98 Trazione elettrica ferroviaria Dopo i convertitori statici SISTEMA DI ALIMENTAZIONE SISTEMA DI TRAZIONE LINEA DI CONTATTO UNIPOLARE MOTORI SINCRONI E ASINCRONI TRIFASE CON INVERTER SISTEMA MONOFASE AT 25kV-50-60Hz (Francia, Giappone) SISTEMI PREESISTENTI Adeguamento apparati di alimentazione di bordo 98
99 Sistema di alimentazione in c.c. Centrale di produzione di energia elettrica 9-25 kv c.a. Trasformatore di gruppo SSE Linea primaria AT 220 kv c.a. Stazione di smistamento 50 Hz Linea di distribuzione MT Ente distributore Impianti ferroviari SSE Sottostazione Elettrica di conversione Gli impianti ferroviari in c.c. sono alimentati alla tensione di V o V. Le sottostazioni elettriche di conversione ferroviarie sono allacciate alla rete di MT da 9 20 kv e trasformano e convertono l energia elettrica da c.a. in c.c.. La potenza fornita da ciascun gruppo di SSE arriva fino a 5,4 MVA. Raddrizzatore ~ Linea di contatto TE 3 kv c.c. binario 99
100 15kV in c. a. a frequenza 16 e 2/3Hz concentrata 16,67 Hz G ~ Gruppi di produzione monofasi autonomi 16 e 2/3 Hz Centrali di produzione di energia elettrica Linea primaria AT 220 kv c.a. 50 Hz La distribuzione centralizzata è caratterizzata dalla presenza di una rete di distribuzione Trasformatore elevatore kv c.a. Stazioni di conversione di fase e di frequenza Trasformatore riduttore kv c.a. Convertitore di frequenza ~ ~ monofase ad Alta Tensione, funzionante alla frequenza di 16 2/3 Hz per il solo uso ferroviario. Tale alimentazione è ottiene con gruppi di kv c.a. 16,67 Hz kv c.a. 16,67 Hz produzione monofasi che Linea primaria (ferroviaria) Linea primaria (ferroviaria) producono l energia direttamente alla frequenza di Trasformatore di gruppo SSE Trasformatore di gruppo SSE 16 2/3 Hz oppure con stazioni di conversione di frequenza che 15 kv c.a. Linea di contatto 15 kv c.a. Linea di contatto prelevano l energia dalla rete AT 16,67 Hz binario 16,67 Hz binario a 50 Hz. 100
101 15kV in c. a. a frequenza 16 e 2/3Hz distribuita Centrali di produzione di energia elettrica 9-25 kv c.a. Trasformatore di gruppo SSE Convertitore di frequenza 15 kv c.a. 16,67 Hz ~ ~ Linea primaria AT 220 kv c.a. Stazione di smistamento 50 Hz Linea di distribuzione MT Ente distributore Impianti ferroviari SSE Sottostazione Elettrica Linea di contatto TE binario I paesi scandinavi hanno seguito una filosofia diversa di elettrificazione adottando il cosiddetto sistema a conversione distribuito: le sottostazioni, sono collegate direttamente alla rete industriale e svolgono il duplice compito di trasformazione e di conversione di fase e di frequenza. In questo modo sia la conversione alla frequenza ferroviaria sia la trasformazione avvengono nelle stesse SSE risparmiando moltissimo sulle linee primarie. 101
102 25 kv in corrente alternata a frequenza 50 Hz R S T Linea primaria AT V SR V TS 380 kv c.a., 50 Hz V RT T I collegamenti alle coppie di fasi della rete AT variano ciclicamente da una SSE alla V RT R V SR V TS S successiva, per cui ciascuna tratta (RS-ST) viene suddivisa Ente distributore Impianti ferroviari in due sottotratte, alimentate con fasi diverse (10-20) e 1 V V 3 separate in centro da una zona neutra. V 2 2 V 1 V 2 V alla linea di contatto TE al binario 25 kv c.a. 50 Hz 102
103 2x 25 kv in corrente alternata a frequenza 50 Hzc Linea AT 380 kvc.a. 50Hz Centrale di produzione di energia elettrica 250 MVA 250 MVA Linea AT 150 kvc.a. 50Hz Ente distributore Linea AT 150 kvc.a. 50Hz Impianti ferroviari L = 25 km Corrente alternata SSE AV 60 MVA 60 MVA SSE AV Posto di parallelo Semplice SSP 2x25 kv c.a. Corrente alternata Feeder Linea di contatto Binario 103
104 Trazione elettrica ferroviaria: Famiglie degli enti Sostegno Linea di Contatto 104
105 Trazione elettrica ferroviaria: Famiglie degli enti Sospensione Punto Fisso 105
106 Trazione elettrica ferroviaria: Famiglie degli enti Palo di Regolazione Automatica Ormeggio Palo di Regolazione Automatica 106
107 Trazione elettrica ferroviaria: Famiglie degli enti Spazio d aria su comunicazione P/D 107
108 Trazione elettrica ferroviaria: TE 25 kv c.a. 108
109 Trazione elettrica ferroviaria: TE 25 kv c.a. 109
110 Trazione elettrica ferroviaria: TE 25kV c.a. 110
Insegnamento di Fondamenti di Infrastrutture viarie
 Insegnamento di Fondamenti di Infrastrutture viarie Territorio ed infrastrutture di trasporto La meccanica della locomozione: questioni generali Il fenomeno dell aderenza e l equazione generale del moto
Insegnamento di Fondamenti di Infrastrutture viarie Territorio ed infrastrutture di trasporto La meccanica della locomozione: questioni generali Il fenomeno dell aderenza e l equazione generale del moto
Le macchine elettriche
 Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Regole della mano destra.
 Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Lezione 16. Motori elettrici: introduzione
 Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Insegnamento di Fondamenti di Infrastrutture viarie
 Insegnamento di Fondamenti di Infrastrutture viarie Territorio ed infrastrutture di trasporto La meccanica della locomozione: questioni generali Il fenomeno dell aderenza e l equazione Dall equazione alle
Insegnamento di Fondamenti di Infrastrutture viarie Territorio ed infrastrutture di trasporto La meccanica della locomozione: questioni generali Il fenomeno dell aderenza e l equazione Dall equazione alle
Parte I: Meccanica della locomozione ed armamento
 Parte I: Meccanica della locomozione ed armamento 1) Meccanica della locomozione: equazione del moto, resistenze al moto, dinamica del veicolo, andamento planoaltimetrico, sopraelevazione in curva, accelerazione
Parte I: Meccanica della locomozione ed armamento 1) Meccanica della locomozione: equazione del moto, resistenze al moto, dinamica del veicolo, andamento planoaltimetrico, sopraelevazione in curva, accelerazione
I motori elettrici più diffusi
 I motori elettrici più diffusi Corrente continua Trifase ad induzione Altri Motori: Monofase Rotore avvolto (Collettore) Sincroni AC Servomotori Passo Passo Motore in Corrente Continua Gli avvolgimenti
I motori elettrici più diffusi Corrente continua Trifase ad induzione Altri Motori: Monofase Rotore avvolto (Collettore) Sincroni AC Servomotori Passo Passo Motore in Corrente Continua Gli avvolgimenti
Azionamenti elettrici per la trazione ferroviaria
 Azionamenti elettrici per la trazione ferroviaria Ing. Antonino Oscar Di Tommaso Università degli Studi di Palermo DIEET (Dipartimento di Ingegneria Elettrica, Elettronica e delle Telecomunicazioni) Ing.
Azionamenti elettrici per la trazione ferroviaria Ing. Antonino Oscar Di Tommaso Università degli Studi di Palermo DIEET (Dipartimento di Ingegneria Elettrica, Elettronica e delle Telecomunicazioni) Ing.
Filobus con marcia autonoma semplificata
 Organizzato da Area Tematica - 2 (Veicolo) Filobus con marcia autonoma semplificata Autore: Menolotto Flavio Ente di Appartenenza: distribuzione energia elettrica Contatti: Tel. 0322 259715 Cell. 328 2154994
Organizzato da Area Tematica - 2 (Veicolo) Filobus con marcia autonoma semplificata Autore: Menolotto Flavio Ente di Appartenenza: distribuzione energia elettrica Contatti: Tel. 0322 259715 Cell. 328 2154994
Fondamenti di macchine elettriche Corso SSIS 2006/07
 9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
Convertitori elettronici di potenza per i veicoli elettrici
 Trazione elettrica veicolare: stato dell arte ed evoluzioni future Convertitori elettronici di potenza per i veicoli elettrici Veicoli elettrici L aumento crescente del costo del combustibile e il problema
Trazione elettrica veicolare: stato dell arte ed evoluzioni future Convertitori elettronici di potenza per i veicoli elettrici Veicoli elettrici L aumento crescente del costo del combustibile e il problema
Soluzione del prof. Paolo Guidi
 Soluzione del prof. Paolo Guidi Lo schema elettrico del sistema formato dalla dinamo e dal motore asincrono trifase viene proposto in Fig. 1; Il motore asincrono trifase preleva la tensione di alimentazione
Soluzione del prof. Paolo Guidi Lo schema elettrico del sistema formato dalla dinamo e dal motore asincrono trifase viene proposto in Fig. 1; Il motore asincrono trifase preleva la tensione di alimentazione
La caratteristica meccanica rappresenta l'andamento della coppia motrice C in
 MOTORI CORRENTE ALTERNATA: CARATTERISTICA MECCANICA La caratteristica meccanica rappresenta l'andamento della coppia motrice C in funzione della velocità di rotazione del rotore n r Alla partenza la C
MOTORI CORRENTE ALTERNATA: CARATTERISTICA MECCANICA La caratteristica meccanica rappresenta l'andamento della coppia motrice C in funzione della velocità di rotazione del rotore n r Alla partenza la C
GUIDA ALLA PREPARAZIONE DELL ESAME
 GUIDA ALLA PREPARAZIONE DELL ESAME INTRODUZIONE Questa guida è rivolta a tutti gli studenti che intendono sostenere l esame del corso di Macchine e Azionamenti Elettrici in forma orale. I testi consigliati
GUIDA ALLA PREPARAZIONE DELL ESAME INTRODUZIONE Questa guida è rivolta a tutti gli studenti che intendono sostenere l esame del corso di Macchine e Azionamenti Elettrici in forma orale. I testi consigliati
FISICA DELLA BICICLETTA
 FISICA DELLA BICICLETTA Con immagini scelte dalla 3 SB PREMESSA: LEGGI FISICHE Velocità periferica (tangenziale) del moto circolare uniforme : v = 2πr / T = 2πrf Velocità angolare: ω = θ / t ; per un giro
FISICA DELLA BICICLETTA Con immagini scelte dalla 3 SB PREMESSA: LEGGI FISICHE Velocità periferica (tangenziale) del moto circolare uniforme : v = 2πr / T = 2πrf Velocità angolare: ω = θ / t ; per un giro
MACCHINE E AZIONAMENTI ELETTRICI
 MACCHINE E AZIONAMENTI ELETTRICI Corso di Laurea in Ingegneria Industriale Anno Accademico 2012-2013 INTRODUZIONE Docente Francesco Benzi Università di Pavia e-mail: fbenzi@unipv.it Dispense in collaborazione
MACCHINE E AZIONAMENTI ELETTRICI Corso di Laurea in Ingegneria Industriale Anno Accademico 2012-2013 INTRODUZIONE Docente Francesco Benzi Università di Pavia e-mail: fbenzi@unipv.it Dispense in collaborazione
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
I.T.I.S. M. FARADAY - Programmazione modulare
 I.T.I.S. M. FARADAY - Programmazione modulare A.S. 2015/2016 Indirizzo: ELETTROTECNICA Disciplina: ELETTROTECNICA E ELETTRONICA Classe: 5Aes Ore settimanali previste: 5 (2) INSEGNANTI: SCIARRA MAURIZIO
I.T.I.S. M. FARADAY - Programmazione modulare A.S. 2015/2016 Indirizzo: ELETTROTECNICA Disciplina: ELETTROTECNICA E ELETTRONICA Classe: 5Aes Ore settimanali previste: 5 (2) INSEGNANTI: SCIARRA MAURIZIO
ITI M. FARADAY Programmazione modulare
 ITI M. FARADAY Programmazione modulare A.S. 2015/16 Indirizzo: ELETTROTECNICA ed ELETTRONICA Disciplina: ELETTROTECNICA ed ELETTRONICA Classe: V A elettrotecnica settimanali previste: 6 INSEGNANTI: ERBAGGIO
ITI M. FARADAY Programmazione modulare A.S. 2015/16 Indirizzo: ELETTROTECNICA ed ELETTRONICA Disciplina: ELETTROTECNICA ed ELETTRONICA Classe: V A elettrotecnica settimanali previste: 6 INSEGNANTI: ERBAGGIO
11. Macchine a corrente continua. unità. 11.1 Principio di funzionamento
 11. Macchine a corrente continua unità 11.1 Principio di funzionamento Si consideri una spira rotante con velocità angolare costante e immersa in un campo magnetico costante come in figura 11.1. I lati
11. Macchine a corrente continua unità 11.1 Principio di funzionamento Si consideri una spira rotante con velocità angolare costante e immersa in un campo magnetico costante come in figura 11.1. I lati
SISTEMA DI ATTUAZIONE DEI GIUNTI
 SISTEMA DI ATTUAZIONE DEI GIUNTI Organi di trasmissione Moto dei giunti basse velocità elevate coppie Ruote dentate variano l asse di rotazione e/o traslano il punto di applicazione denti a sezione larga
SISTEMA DI ATTUAZIONE DEI GIUNTI Organi di trasmissione Moto dei giunti basse velocità elevate coppie Ruote dentate variano l asse di rotazione e/o traslano il punto di applicazione denti a sezione larga
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
Macchina sincrona (alternatore)
") Macchina sincrona (alternatore) Principio di funzionamento Le macchine sincrone si dividono in: macchina sincrona isotropa, se è realizzata la simmetria del flusso; macchina sincrona anisotropa, quanto
Macchina sincrona (alternatore) Principio di funzionamento Le macchine sincrone si dividono in: macchina sincrona isotropa, se è realizzata la simmetria del flusso; macchina sincrona anisotropa, quanto
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica. http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
GRANDEZZE ELETTRICHE E COMPONENTI
 Capitolo3:Layout 1 17-10-2012 15:33 Pagina 73 CAPITOLO 3 GRANDEZZE ELETTRICHE E COMPONENTI OBIETTIVI Conoscere le grandezze fisiche necessarie alla trattazione dei circuiti elettrici Comprendere la necessità
Capitolo3:Layout 1 17-10-2012 15:33 Pagina 73 CAPITOLO 3 GRANDEZZE ELETTRICHE E COMPONENTI OBIETTIVI Conoscere le grandezze fisiche necessarie alla trattazione dei circuiti elettrici Comprendere la necessità
Esempio Esame di Fisica Generale I C.d.L. ed.u. Informatica
 Esempio Esame di Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. 1d (giorno) contiene all incirca (a) 8640 s; (b) 9 10 4 s; (c) 86 10 2 s; (d) 1.44 10 3 s; (e) nessuno di questi valori. 2. Sono
Esempio Esame di Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. 1d (giorno) contiene all incirca (a) 8640 s; (b) 9 10 4 s; (c) 86 10 2 s; (d) 1.44 10 3 s; (e) nessuno di questi valori. 2. Sono
Impianti di propulsione navale
 La potenza elettrica è normalmente generata a bordo da uno o più dei seguenti sistemi che possono funzionare isolati o in parallele tra loro: Gruppi diesel-alternatori ; Alternatori asse trascinati dal
La potenza elettrica è normalmente generata a bordo da uno o più dei seguenti sistemi che possono funzionare isolati o in parallele tra loro: Gruppi diesel-alternatori ; Alternatori asse trascinati dal
Azionamenti in Corrente Continua
 Convertitori La tensione variabile necessaria per regolare la velocità in un motore a c.c. può essere ottenuta utilizzando, a seconda dei casi, due tipi di convertitori: raddrizzatori controllati (convertitori
Convertitori La tensione variabile necessaria per regolare la velocità in un motore a c.c. può essere ottenuta utilizzando, a seconda dei casi, due tipi di convertitori: raddrizzatori controllati (convertitori
DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE
 DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE Per un corretto dimensionamento del martinetto a ricircolo di sfere è necessario operare come segue: definizione dei dati del dell applicazione (A)
DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE Per un corretto dimensionamento del martinetto a ricircolo di sfere è necessario operare come segue: definizione dei dati del dell applicazione (A)
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte;
 Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
Istituto Tecnico dei Trasporti e Logistica Nautico San Giorgio Genova A/S 2012/2013 Programma Didattico Svolto Elettrotecnica ed Elettronica
 Docenti: Coppola Filippo Sergio Sacco Giuseppe Istituto Tecnico dei Trasporti e Logistica Nautico San Giorgio Genova A/S 2012/2013 Programma Didattico Svolto Classe 3A2 Elettrotecnica ed Elettronica Modulo
Docenti: Coppola Filippo Sergio Sacco Giuseppe Istituto Tecnico dei Trasporti e Logistica Nautico San Giorgio Genova A/S 2012/2013 Programma Didattico Svolto Classe 3A2 Elettrotecnica ed Elettronica Modulo
DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA. Dinamica: studio delle forze che causano il moto dei corpi
 DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA Dinamica: studio delle forze che causano il moto dei corpi 1 Forza Si definisce forza una qualunque causa esterna che produce una variazione dello stato
DINAMICA DEL PUNTO MATERIALE E CONCETTO DI FORZA Dinamica: studio delle forze che causano il moto dei corpi 1 Forza Si definisce forza una qualunque causa esterna che produce una variazione dello stato
Esercizio 20 - tema di meccanica applicata e macchine a fluido- 2002
 Esercizio 0 - tema di meccanica applicata e macchine a fluido- 00 er regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull albero di trasmissione del motore un volano in ghisa.
Esercizio 0 - tema di meccanica applicata e macchine a fluido- 00 er regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull albero di trasmissione del motore un volano in ghisa.
A. Maggiore Appunti dalle lezioni di Meccanica Tecnica
 Il giunto idraulico Fra i dispositivi che consentono di trasmettere potenza nel moto rotatorio, con la possibilità di variare la velocità relativa fra movente e cedente, grande importanza ha il giunto
Il giunto idraulico Fra i dispositivi che consentono di trasmettere potenza nel moto rotatorio, con la possibilità di variare la velocità relativa fra movente e cedente, grande importanza ha il giunto
APPLICATION SHEET Luglio
 Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
LA CORRENTE ELETTRICA Prof. Erasmo Modica erasmo@galois.it
 LA CORRENTE ELETTRICA Prof. Erasmo Modica erasmo@galois.it L INTENSITÀ DELLA CORRENTE ELETTRICA Consideriamo una lampadina inserita in un circuito elettrico costituito da fili metallici ed un interruttore.
LA CORRENTE ELETTRICA Prof. Erasmo Modica erasmo@galois.it L INTENSITÀ DELLA CORRENTE ELETTRICA Consideriamo una lampadina inserita in un circuito elettrico costituito da fili metallici ed un interruttore.
INDICE. Assessorato turismo, sport, commercio e trasporti Infrastrutture funiviarie
 INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
Impianti navali B. Parte 4. II semestre 2013. giulio.barabino@unige.it. danilo.tigano@unige.it
 Impianti navali B Parte 4 II semestre 2013 giulio.barabino@unige.it danilo.tigano@unige.it 1 Convertitore CA-CC monofase controllato 2 Convertitore CA-CC trifase controllato 3 Tiristore 4 Convertitore
Impianti navali B Parte 4 II semestre 2013 giulio.barabino@unige.it danilo.tigano@unige.it 1 Convertitore CA-CC monofase controllato 2 Convertitore CA-CC trifase controllato 3 Tiristore 4 Convertitore
CABINE ELETTRICHE DI TRASFORMAZIONE
 Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P39 10. Serie P42 12. Serie P57 14. Serie P60 16. Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
Componenti per la robotica: Generalità e Attuatori
 Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO. Prof. Silvio Stasi Dott. Ing. Nadia Salvatore Dott. Ing. Michele Debenedictis
 CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO SCHEMA DELL AZIONAMENTO A CATENA APERTA AZIONAMENTO L azionamento a catena aperta comprende il motore asincrono e il relativo convertitore statico che riceve
CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO SCHEMA DELL AZIONAMENTO A CATENA APERTA AZIONAMENTO L azionamento a catena aperta comprende il motore asincrono e il relativo convertitore statico che riceve
Ventilazione del locale di carica carrelli elevatori
 Ventilazione del locale di carica carrelli elevatori In ambito industriale è ormai consolidato l uso di carrelli elevatori elettrici. Queste macchine sono corredate di un gruppo batterie ricaricabili che
Ventilazione del locale di carica carrelli elevatori In ambito industriale è ormai consolidato l uso di carrelli elevatori elettrici. Queste macchine sono corredate di un gruppo batterie ricaricabili che
Generazione diesel-elettrica ad alta efficienza con sistemi di accumulo
 Generazione diesel-elettrica ad alta efficienza con sistemi di accumulo Giordano Torri Fondazione Megalia 8 Giornata sull efficienza energetica nelle industrie Milano, 18 Maggio 2016 18 Maggio 2016 Pg.
Generazione diesel-elettrica ad alta efficienza con sistemi di accumulo Giordano Torri Fondazione Megalia 8 Giornata sull efficienza energetica nelle industrie Milano, 18 Maggio 2016 18 Maggio 2016 Pg.
Impianti per il trasferimento di energia
 Capitolo 2 Impianti per il trasferimento di energia 2.1 2.1 Introduzione In molte zone di un velivolo è necessario disporre di energia, in modo controllato; questo è necessario per molte attività, ad esempio
Capitolo 2 Impianti per il trasferimento di energia 2.1 2.1 Introduzione In molte zone di un velivolo è necessario disporre di energia, in modo controllato; questo è necessario per molte attività, ad esempio
Scelta e verifica dei motori elettrici per gli azionamenti di un mezzo di trazione leggera
 Scelta e verifica dei motori elettrici per gli azionamenti di un mezzo di trazione leggera Si consideri un convoglio ferroviario per la trazione leggera costituito da un unità di trazione, la quale è formata
Scelta e verifica dei motori elettrici per gli azionamenti di un mezzo di trazione leggera Si consideri un convoglio ferroviario per la trazione leggera costituito da un unità di trazione, la quale è formata
Esercitazione 5 Dinamica del punto materiale
 Problema 1 Un corpo puntiforme di massa m = 1.0 kg viene lanciato lungo la superficie di un cuneo avente un inclinazione θ = 40 rispetto all orizzontale e altezza h = 80 cm. Il corpo viene lanciato dal
Problema 1 Un corpo puntiforme di massa m = 1.0 kg viene lanciato lungo la superficie di un cuneo avente un inclinazione θ = 40 rispetto all orizzontale e altezza h = 80 cm. Il corpo viene lanciato dal
L avviamento dei motori asincroni
 L avviamento dei motori asincroni Un problema rilevante è quello dell avviamento dei motori. Nei motori asincroni infatti, durante l avviamento, circolano nel motore correnti notevoli sia perché la resistenza
L avviamento dei motori asincroni Un problema rilevante è quello dell avviamento dei motori. Nei motori asincroni infatti, durante l avviamento, circolano nel motore correnti notevoli sia perché la resistenza
F S V F? Soluzione. Durante la spinta, F S =ma (I legge di Newton) con m=40 Kg.
 con m=40 Kg.") Spingete per 4 secondi una slitta dove si trova seduta la vostra sorellina. Il peso di slitta+sorella è di 40 kg. La spinta che applicate F S è in modulo pari a 60 Newton. La slitta inizialmente è ferma,
Spingete per 4 secondi una slitta dove si trova seduta la vostra sorellina. Il peso di slitta+sorella è di 40 kg. La spinta che applicate F S è in modulo pari a 60 Newton. La slitta inizialmente è ferma,
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante
 z + p / γ = costante") IDRAULICA LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante 2 LEGGE DI STEVIN Z = ALTEZZA GEODETICA ENERGIA POTENZIALE PER UNITA DI PESO p /
IDRAULICA LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante 2 LEGGE DI STEVIN Z = ALTEZZA GEODETICA ENERGIA POTENZIALE PER UNITA DI PESO p /
CORRENTE E TENSIONE ELETTRICA LA CORRENTE ELETTRICA
 CORRENTE E TENSIONE ELETTRICA La conoscenza delle grandezze elettriche fondamentali (corrente e tensione) è indispensabile per definire lo stato di un circuito elettrico. LA CORRENTE ELETTRICA DEFINIZIONE:
CORRENTE E TENSIONE ELETTRICA La conoscenza delle grandezze elettriche fondamentali (corrente e tensione) è indispensabile per definire lo stato di un circuito elettrico. LA CORRENTE ELETTRICA DEFINIZIONE:
PROVE SULLA MACCHINA A CORRENTE CONTINUA
 LABORATORIO DI MACCHINE ELETTRICHE PROVE SULLA MACCHINA A CORRENTE CONTINUA PROVE SULLA MACCHINA A C. C. Contenuti Le prove di laboratorio che verranno prese in esame riguardano: la misura a freddo, in
LABORATORIO DI MACCHINE ELETTRICHE PROVE SULLA MACCHINA A CORRENTE CONTINUA PROVE SULLA MACCHINA A C. C. Contenuti Le prove di laboratorio che verranno prese in esame riguardano: la misura a freddo, in
ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO
 ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO vittorio.scialla@strumentiperleaziende.com Attuatore per traiettorie non lineari dotato di
ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO vittorio.scialla@strumentiperleaziende.com Attuatore per traiettorie non lineari dotato di
Motori Sincroni. Motori Sincroni
 Motori Sincroni Motori Sincroni Se ad un generatore sincrono, funzionante in parallelo su una linea, anziché alimentarlo con una potenza meccanica, gli si applica una coppia resistente, esso continuerà
Motori Sincroni Motori Sincroni Se ad un generatore sincrono, funzionante in parallelo su una linea, anziché alimentarlo con una potenza meccanica, gli si applica una coppia resistente, esso continuerà
Macchine elettriche. La macchina sincrona. Corso SSIS 2006-07. 07 prof. Riolo Salvatore
 Macchine elettriche La macchina sincrona 07 prof. Struttura Essa comprende : a) albero meccanico collegato al motore primo b) circuito magnetico rotorico fissato all albero (poli induttori) i) c) avvolgimento
Macchine elettriche La macchina sincrona 07 prof. Struttura Essa comprende : a) albero meccanico collegato al motore primo b) circuito magnetico rotorico fissato all albero (poli induttori) i) c) avvolgimento
MACCHINE ELETTRICHE ROTANTI IN CORRENTE ALTERNATA
 RICHIAMI SUI SISTEMI TRIFASE E SUI TRASFORMATORI - Ripasso generale sui sistemi trifase. - Ripasso generale sulle misure di potenza nei sistemi trifase. - Ripasso generale sui trasformatori monofase e
RICHIAMI SUI SISTEMI TRIFASE E SUI TRASFORMATORI - Ripasso generale sui sistemi trifase. - Ripasso generale sulle misure di potenza nei sistemi trifase. - Ripasso generale sui trasformatori monofase e
IL TRASFORMATORE REALE
 Il trasformatore ideale è tale poiché: IL TRASFORMATORE REALE si ritengono nulle le resistenze R 1 e R 2 degli avvolgimenti; il flusso magnetico è interamente concatenato con i due avvolgimenti (non vi
Il trasformatore ideale è tale poiché: IL TRASFORMATORE REALE si ritengono nulle le resistenze R 1 e R 2 degli avvolgimenti; il flusso magnetico è interamente concatenato con i due avvolgimenti (non vi
METODO PER LA DESCRIZIONE DEL CAMPO MAGNETICO ROTANTE
 Ing. ENRICO BIAGI Docente di Tecnologie elettrice, Disegno, Progettazione ITIS A. Volta - Perugia ETODO PER LA DESCRIZIONE DEL CAPO AGNETICO ROTANTE Viene illustrato un metodo analitico-grafico per descrivere
Ing. ENRICO BIAGI Docente di Tecnologie elettrice, Disegno, Progettazione ITIS A. Volta - Perugia ETODO PER LA DESCRIZIONE DEL CAPO AGNETICO ROTANTE Viene illustrato un metodo analitico-grafico per descrivere
Motori brushless. Alimentando il motore e pilotando opportunamente le correnti I in modo che siano come nella figura 2 si nota come
 49 Motori brushless 1. Generalità I motori brushless sono idealmente derivati dai motori in DC con il proposito di eliminare il collettore a lamelle e quindi le spazzole. Esistono due tipi di motore brushless:
49 Motori brushless 1. Generalità I motori brushless sono idealmente derivati dai motori in DC con il proposito di eliminare il collettore a lamelle e quindi le spazzole. Esistono due tipi di motore brushless:
 IL TRASFORMATORE Prof. S. Giannitto Il trasformatore è una macchina in grado di operare solo in corrente alternata, perché sfrutta i principi dell'elettromagnetismo legati ai flussi variabili. Il trasformatore
IL TRASFORMATORE Prof. S. Giannitto Il trasformatore è una macchina in grado di operare solo in corrente alternata, perché sfrutta i principi dell'elettromagnetismo legati ai flussi variabili. Il trasformatore
LE MACCHINE ELETTRICHE
 LE MACCHINE ELETTRICHE Principi generali Le macchine sono sistemi fisici in cui avvengono trasformazioni di energia. Quelle particolari macchine in cui almeno una delle forme di energia, ricevuta o resa,
LE MACCHINE ELETTRICHE Principi generali Le macchine sono sistemi fisici in cui avvengono trasformazioni di energia. Quelle particolari macchine in cui almeno una delle forme di energia, ricevuta o resa,
Generatore radiologico
 Generatore radiologico Radiazioni artificiali alimentazione: corrente elettrica www.med.unipg.it/ac/rad/ www.etsrm.it oscar fiorucci. laurea.tecn.radiol@ospedale.perugia.it Impianto radiologico trasformatore
Generatore radiologico Radiazioni artificiali alimentazione: corrente elettrica www.med.unipg.it/ac/rad/ www.etsrm.it oscar fiorucci. laurea.tecn.radiol@ospedale.perugia.it Impianto radiologico trasformatore
CARATTERISTICHE MOTORI CORRENTE ALTERNATA TRIFASE
 11.1 ATL 10 BSA 10 CARATTERISTICHE MOTORI CARATTERISTICHE MOTORI CORRENTE ALTERNATA TRIFASE Motori asincroni trifase in esecuzione ventilata, con rotore equilibrato dinamicamente. Per l attuatore ATL 10
11.1 ATL 10 BSA 10 CARATTERISTICHE MOTORI CARATTERISTICHE MOTORI CORRENTE ALTERNATA TRIFASE Motori asincroni trifase in esecuzione ventilata, con rotore equilibrato dinamicamente. Per l attuatore ATL 10
PRINCIPI DI TRASDUZIONE
 PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
Motore passo passo: Laboratorio di Elettronica 1
 Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Integrazione degli impianti fotovoltaici nella rete elettrica
 Integrazione degli impianti fotovoltaici nella rete elettrica G. Simioli Torna al programma Indice degli argomenti Considerazioni introduttive Quadro normativo - Norma CEI 11-20 Isola indesiderata - Prove
Integrazione degli impianti fotovoltaici nella rete elettrica G. Simioli Torna al programma Indice degli argomenti Considerazioni introduttive Quadro normativo - Norma CEI 11-20 Isola indesiderata - Prove
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini
 Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
Corso di Componenti e Impianti Termotecnici LE RETI DI DISTRIBUZIONE PERDITE DI CARICO LOCALIZZATE
 LE RETI DI DISTRIBUZIONE PERDITE DI CARICO LOCALIZZATE 1 PERDITE DI CARICO LOCALIZZATE Sono le perdite di carico (o di pressione) che un fluido, in moto attraverso un condotto, subisce a causa delle resistenze
LE RETI DI DISTRIBUZIONE PERDITE DI CARICO LOCALIZZATE 1 PERDITE DI CARICO LOCALIZZATE Sono le perdite di carico (o di pressione) che un fluido, in moto attraverso un condotto, subisce a causa delle resistenze
ENERGIA ELETTRICA: Generatori e tipi di collegamento. Istituto Paritario Scuole Pie Napoletane - Anno Scolastico 2012-13 -
 ENERGIA ELETTRICA: Generatori e tipi di collegamento Quando un conduttore in movimento attraversa le linee di forza di un campo magnetico, nel conduttore si genera una forza elettromotrice indotta in grado
ENERGIA ELETTRICA: Generatori e tipi di collegamento Quando un conduttore in movimento attraversa le linee di forza di un campo magnetico, nel conduttore si genera una forza elettromotrice indotta in grado
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA
 MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
Maiello pompe e sistemi costruzione e servizi by L.E.M. s.r.l. Gruppi di pressurizzazione con Inverter
 Elettropompe con inverter: analisi tecnico economica Il risparmio energetico delle elettropompe è un elemento cruciale per il sistema produttivo, in quanto la presenza di motori elettrici nella produzione
Elettropompe con inverter: analisi tecnico economica Il risparmio energetico delle elettropompe è un elemento cruciale per il sistema produttivo, in quanto la presenza di motori elettrici nella produzione
INTRODUZIONE ALLA CONVERSIONE ELETTROMECCANICA
 INTRODUZIONE ALLA CONVERSIONE ELETTROMECCANICA Il trasferimento dell energia dalle fonti primarie (petrolio, metano, risorse idriche, eoliche, solari, ecc.) agli utilizzatori passa attraverso molteplici
INTRODUZIONE ALLA CONVERSIONE ELETTROMECCANICA Il trasferimento dell energia dalle fonti primarie (petrolio, metano, risorse idriche, eoliche, solari, ecc.) agli utilizzatori passa attraverso molteplici
Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo.
 Introduzione Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo. riassunto Cosa determina il moto? Forza - Spinta di un
Introduzione Cosa determina il moto? Aristotele pensava che occorresse uno sforzo per mantenere un corpo in movimento. Galileo non era d'accordo. riassunto Cosa determina il moto? Forza - Spinta di un
Scheda di progettazione generale (UFC effettivamente svolte) UNITÀ DIDATTICHE 1. Elettromagnetismo 2. Le macchine elettromagnetiche
 UNITÀ DIDATTICHE 1. Elettromagnetismo 2. Le macchine elettromagnetiche") Elettrotecnica-Elettronica AREA DI RIFERIMENTO Professionale Docenti: INGROSSO Pasquale DANZA Salvatore Libro di testo adottato: Gaetano Conte, Corso di Elettrotecnica ed Elettronica per l articolazione
Elettrotecnica-Elettronica AREA DI RIFERIMENTO Professionale Docenti: INGROSSO Pasquale DANZA Salvatore Libro di testo adottato: Gaetano Conte, Corso di Elettrotecnica ed Elettronica per l articolazione
Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici.
 GLI ATTUATORI Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici. La casistica è assai vasta ; sono comuni i semplici azionamenti magnetici (elettromagneti
GLI ATTUATORI Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici. La casistica è assai vasta ; sono comuni i semplici azionamenti magnetici (elettromagneti
Classe 35 A Anno Accademico 2005-06
 Classe 35 A Anno Accademico 2005-06 1) In un bipolo C, in regime sinusoidale, la tensione ai suoi capi e la corrente che l attraversa sono: A) in fase; B) in opposizione di fase; C) il fasore della corrente
Classe 35 A Anno Accademico 2005-06 1) In un bipolo C, in regime sinusoidale, la tensione ai suoi capi e la corrente che l attraversa sono: A) in fase; B) in opposizione di fase; C) il fasore della corrente
MISURE DI GRANDEZZE ELETTRICHE
 MISURE DI GRANDEZZE ELETTRICHE La tecnologia oggi permette di effettuare misure di grandezze elettriche molto accurate: precisioni dell ordine dello 0,1 0,2% sono piuttosto facilmente raggiungibili. corrente:
MISURE DI GRANDEZZE ELETTRICHE La tecnologia oggi permette di effettuare misure di grandezze elettriche molto accurate: precisioni dell ordine dello 0,1 0,2% sono piuttosto facilmente raggiungibili. corrente:
LA FORZA. Il movimento: dal come al perché
 LA FORZA Concetto di forza Principi della Dinamica: 1) Principio d inerzia 2) F=ma 3) Principio di azione e reazione Forza gravitazionale e forza peso Accelerazione di gravità Massa, peso, densità pag.1
LA FORZA Concetto di forza Principi della Dinamica: 1) Principio d inerzia 2) F=ma 3) Principio di azione e reazione Forza gravitazionale e forza peso Accelerazione di gravità Massa, peso, densità pag.1
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte;
 Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte; Obiettivi generali. Macchine Elettriche, HOEPLI di Gaetano Conte; Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte;
Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte; Obiettivi generali. Macchine Elettriche, HOEPLI di Gaetano Conte; Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte;
Pompe di circolazione
 Corso di IMPIANTI TECNICI per l EDILIZIA Pompe di circolazione per gli impianti di riscaldamento Prof. Paolo ZAZZINI Dipartimento INGEO Università G. D Annunzio Pescara www.lft.unich.it Pompe di circolazione
Corso di IMPIANTI TECNICI per l EDILIZIA Pompe di circolazione per gli impianti di riscaldamento Prof. Paolo ZAZZINI Dipartimento INGEO Università G. D Annunzio Pescara www.lft.unich.it Pompe di circolazione
LA CORRENTE ELETTRICA CONTINUA
 LA CORRENTE ELETTRICA CONTINUA (Fenomeno, indipendente dal tempo, che si osserva nei corpi conduttori quando le cariche elettriche fluiscono in essi.) Un conduttore metallico è in equilibrio elettrostatico
LA CORRENTE ELETTRICA CONTINUA (Fenomeno, indipendente dal tempo, che si osserva nei corpi conduttori quando le cariche elettriche fluiscono in essi.) Un conduttore metallico è in equilibrio elettrostatico
Proponente: GIOSUE FEOLA TEL. 3401014152 E-Mail: giosuefeola@libero.it
 Titolo del progetto: STERILIZZATORE ULTRA-FLASH Proponente: GIOSUE FEOLA TEL. 3401014152 E-Mail: giosuefeola@libero.it GENERALITA L idea è quella di realizzare uno sterilizzatore per latte, di nuova concezione,
Titolo del progetto: STERILIZZATORE ULTRA-FLASH Proponente: GIOSUE FEOLA TEL. 3401014152 E-Mail: giosuefeola@libero.it GENERALITA L idea è quella di realizzare uno sterilizzatore per latte, di nuova concezione,
Il Sistema di Distribuzione dell Energia Elettrica Roberto Faranda Dipartimento di Energia, Via La Masa, 34 (Bovisa) +39.02.2399.
 +39.02.2399.") Il Sistema di Distribuzione dell Energia Elettrica Roberto Faranda Dipartimento di Energia, Via La Masa, 34 (Bovisa) +39.02.2399.3793 Caratteristiche dell energia elettrica 2 Perché l uso dell Energia
Il Sistema di Distribuzione dell Energia Elettrica Roberto Faranda Dipartimento di Energia, Via La Masa, 34 (Bovisa) +39.02.2399.3793 Caratteristiche dell energia elettrica 2 Perché l uso dell Energia
Università degli Studi di Trieste a.a. 2009-2010. Convogliatori. continuo sono anche definiti convogliatori. Sono qui compresi:
 Convogliatori I trasportatori di tipo fisso con moto spesso continuo sono anche definiti convogliatori. Sono qui compresi: trasportatori a rulli (motorizzati o non motorizzati); trasportatori a nastro;
Convogliatori I trasportatori di tipo fisso con moto spesso continuo sono anche definiti convogliatori. Sono qui compresi: trasportatori a rulli (motorizzati o non motorizzati); trasportatori a nastro;
Sistemi Trifase. invece è nel senso degli anticipi (+) il sistema è denominato simmetrico inverso.
 il sistema è denominato simmetrico inverso.") Sistemi Trifase Un insieme di m generatori che producono f.e.m. sinusoidali di eguale valore massimo e sfasate tra di loro dello stesso angolo (2π/m) è un sistema polifase simmetrico ad m fasi. Se lo sfasamento
Sistemi Trifase Un insieme di m generatori che producono f.e.m. sinusoidali di eguale valore massimo e sfasate tra di loro dello stesso angolo (2π/m) è un sistema polifase simmetrico ad m fasi. Se lo sfasamento
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
CORSO DI IMPIANTI DI PROPULSIONE NAVALE
 ACCADEMIA NAVALE 1 ANNO CORSO APPLICATIVO GENIO NAVALE CORSO DI IMPIANTI DI PROPULSIONE NAVALE Lezione 09 Motori diesel lenti a due tempi A.A. 2011 /2012 Prof. Flavio Balsamo Nel motore a due tempi l intero
ACCADEMIA NAVALE 1 ANNO CORSO APPLICATIVO GENIO NAVALE CORSO DI IMPIANTI DI PROPULSIONE NAVALE Lezione 09 Motori diesel lenti a due tempi A.A. 2011 /2012 Prof. Flavio Balsamo Nel motore a due tempi l intero
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
La corrente elettrica
 La corrente elettrica La corrente elettrica è un movimento di cariche elettriche che hanno tutte lo stesso segno e si muovono nello stesso verso. Si ha corrente quando: 1. Ci sono cariche elettriche; 2.
La corrente elettrica La corrente elettrica è un movimento di cariche elettriche che hanno tutte lo stesso segno e si muovono nello stesso verso. Si ha corrente quando: 1. Ci sono cariche elettriche; 2.
Fondamenti di Trasporti. Meccanica della Locomozione Utilizzazione della potenza a bordo
 Università di Catania Facoltà di Ingegneria Corso di Laurea in Ingegneria Civile AA 1011 1 Fondamenti di Trasporti Meccanica della Locomozione Utilizzazione della potenza a bordo Giuseppe Inturri Dipartimento
Università di Catania Facoltà di Ingegneria Corso di Laurea in Ingegneria Civile AA 1011 1 Fondamenti di Trasporti Meccanica della Locomozione Utilizzazione della potenza a bordo Giuseppe Inturri Dipartimento
Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA
 Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA turbine eoliche ad asse verticale VAWT A.A. 2008/09 Energie Alternative Prof.B.Fortunato
Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA turbine eoliche ad asse verticale VAWT A.A. 2008/09 Energie Alternative Prof.B.Fortunato
CONDUTTORI, CAPACITA' E DIELETTRICI
 CONDUTTORI, CAPACITA' E DIELETTRICI Capacità di un conduttore isolato Se trasferiamo una carica elettrica su di un conduttore isolato questa si distribuisce sulla superficie in modo che il conduttore sia
CONDUTTORI, CAPACITA' E DIELETTRICI Capacità di un conduttore isolato Se trasferiamo una carica elettrica su di un conduttore isolato questa si distribuisce sulla superficie in modo che il conduttore sia
1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti.
. Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti.") SOLUZIONE TEMA MINISTERIALE TECNICO DELLE INDUSTRIE ELETTRICHE ED ELETTRONICHE 2012 1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti. L impianto elettrico a
SOLUZIONE TEMA MINISTERIALE TECNICO DELLE INDUSTRIE ELETTRICHE ED ELETTRONICHE 2012 1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti. L impianto elettrico a