CORSO DI ORDINAMENTO. Tema di: SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE
|
|
|
- Marilena Abate
- 8 anni fa
- Visualizzazioni
Transcript
1 Sessione ordinaria 211 Seconda prova scritta M48 - ESAME DI STATO DI ISTITUTO PROFESSIONALE ORSO DI ORDINAMENTO Indirizzo: TENIO DELLE INDUSTRIE ELETTRIHE Tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE DELLA PRODUZIONE Si desidera automatizzare il ciclo di trattamento e stoccaggio di alimenti. I prodotti scorrono su un nastro trasportatore che si deve prima fermare sotto la stazione di lavaggio per un tempo T1, per poi ripartire e rifermarsi sotto la seconda stazione per la fase di asciugatura di durata T2. Dopo l asciugatura, il nastro si rimette in moto per trasportare il prodotto sotto un pistone che lo spinge dentro una scatola per l imballaggio. Una volta riempita la scatola con N prodotti, questa viene portata via da un secondo nastro trasportatore. Il motore del primo nastro è inserito in un sistema di controllo della velocità ad anello chiuso. Le funzioni di trasferimento del motore e del sistema di comando valgono rispettivamente: mot,8 s s c 62, 5 (1 )(1 ) 5 5 La funzione di trasferimento della catena di reazione presenta un guadagno pari a,625 4 V s/rad e un polo con costante di tempo,2 1 s. Il candidato fatte eventuali ipotesi aggiuntive, Descriva il sistema di controllo tramite uno schema a blocchi inserendo un regolatore proporzionale Kp =3,2 e calcoli la funzione di trasferimento totale; Verifichi la stabilità del sistema di controllo ad anello chiuso ricavando i margini di ampiezza e di fase; alcoli la velocità di rotazione del motore sapendo che la tensione di riferimento V R relativa alla velocità desiderata vale 5V; Illustri gli effetti sulla precisione, la velocità e la stabilità del sistema di controllo se la costante del regolatore viene incrementata fino a avere Kp=8; Descriva una possibile configurazione del sistema automatico di trattamento e stoccaggio, indicando di conseguenza i dispositivi necessari, integrandolo eventualmente con altre funzionalità e illustri una soluzione dell automatismo usando un linguaggio di sua scelta. Durata massima della prova: 6 ore. E consentito soltanto l'uso di manuali tecnici e di calcolatrici tascabili non programmabili. Non è consentito lasciare l'istituto prima che siano trascorse 3 ore dalla dettatura del tema.

2 Soluzione PARTE SISTEMI In figura è rappresentato lo schema a blocchi del sistema V REF Ve,8 Regolatore mot = 62,5 s s R = (1 )(1 ) 5 5 (s) Vr,625 H 1,2 1 4 s La parte di sistema indicata come blocco di reazione deve avere guadagno statico K =,625 4 e costante di tempo,2 1 s Pertanto è un sistema del primo ordine con F.d.T. : A,625 H 1,2 1 4 s Ipotizziamo prima il valore del regolatore pari a 3,2. La funzione di trasferimento della catena di andata vale: A R M,8 3,2 62,5 (1 s,2) (1 s,2) A 16 (1 s,2) (1 s,2) La funzione di trasferimento ad anello aperto vale : AP H = R M,8,625,2 62,5 (1 s,2) (1 s,2) (1, s) AP 1 (1 s,2) (1 s,2) (1,2 1 4 s)
 (1 s,2) A 16 (1 s,2) (1 s,2) La funzione di trasferimento ad anello aperto vale")
3 Mentre la funzione di trasferimento a catena chiusa vale: H 1 Andata Andata 16 (1 s,2) (1 s,2) H 16,625 1 (1 s,2) (1 s,2) 1,2 1 4 s H 4 16 (1,2 1 s) (1 s,2) (1 s,2) (1,2 1 4 s) 1 Per valutare la stabilità tracciamo i diagrammi di Bode della F.d.T. a catena aperta. Diagramma di Bode Modulo M [db] Fase [gradi] Pulsazione [rad/s] uadagno di Bode: K = 1, K_db = 2 Polo reale: p = -5. tau =. Polo reale: p = -5. tau =.2 Polo reale: p = -5. tau =.2 Valutiamo ora i margini fase e di guadagno con il diagramma successivo
![Diagramma di Bode Modulo M [db] -5-1 -15 1 1 2 1 4 1 6 Fase [gradi] -45-9 -135-18 -225-27 1 1 2 1 4 1 6 Pulsazione [rad/s] uadagno di Bode: K =](/docs-images/51/18000458/images/page_3.jpg "1, K_db = 2 Polo reale: p = -5. tau =. Polo reale: p = -5. tau =.2 Polo reale: p = -5. tau =.2 Valutiamo ora i margini fase e di guadagno con il diagramma successivo")
4 Bode Diagrams m=4.923 db (at rad/sec), Pm= deg. (at rad/sec) 5 Phase (deg); Magnitude (db) Frequency (rad/sec) Si nota che i margini sono ampiamente positivi, (Mg=4.93 ed Mf stabile in modo robusto essendo Mg>15 ed Mf> ) il sistema è Per il calcolo della velocità di rotazione del motore posto: V R = 5V 5 V R s Si ottiene: (1 s,2 1 ) VR H 4 s (1 s,2) (1 s,2) (1 s,2 1 ) 1 Applicando il teorema del valore finale ricaviamo la velocità di rotazione del motore: 5 16 ( ) lim s ( s) s 72,72rad / s s s 11 Ipotizziamo ora il valore del regolatore pari a 8. La funzione di trasferimento della catena di andata vale ora: A R M,8 8 62,5 (1 s,2) (1 s,2) A 4 (1 s,2) (1 s,2)
 il sistema è Per il calcolo della velocità di rotazione del motore posto: V R = 5V 5 V R s Si ottiene: 4 5 16 (1 s,2 1 ) VR H 4 s (1 s,2) (1 s,2) (1 s,2 1 ) 1 Applicando il teorema")
5 La funzione di trasferimento ad anello aperto vale : AP H = R M,8,625 62,5 (1 s,2) (1 s,2) (1, s) AP 25 (1 s,2) (1 s,2) (1,2 1 4 s) Per valutare la stabilità tracciamo i diagrammi di Bode della nuova F.d.T. a catena aperta. Diagramma di Bode Modulo M [db] Fase [gradi] Pulsazione [rad/s] Il nuovo valore del guadagno è: uadagno di Bode: K = 25, K_db = 28 Polo reale: p = -5. tau =. Polo reale: p = -5. tau =.2 Polo reale: p = -5. tau =.2
![Diagramma di Bode Modulo M [db] -5-1 -15 1 1 2 1 4 1 6 Fase [gradi] -45-9 -135-18 -225-27 1 1 2 1 4 1 6 Pulsazione [rad/s] Il](/docs-images/51/18000458/images/page_5.jpg "nuovo valore del guadagno è: uadagno di Bode: K = 25, K_db = 28 Polo reale: p = -5. tau =. Polo reale: p = -5. tau =.2 Polo reale: p = -5.")
6 Valutiamo ora i nuovi margini fase e di guadagno con il diagramma successivo Bode Diagrams m= db (at rad/sec), Pm= deg. (at rad/sec) 5 Phase (deg); Magnitude (db) Frequency (rad/sec) Si può notare che sia i margini di guadagno che di fase si riducono. Il sistema non risulta più stabile in modo robusto, la sua stabilità si è ridotta ed è quindi più incerta. Il sistema rimane comunque stabile. Inoltre aumentando il valore del K del regolatore il sistema risulta più veloce, l errore a regime si riduce ma si ottiene una sovraelongazione maggiore che mette a rischio la stabilità. Si possono confrontare le due risposte del sistema considerando i due valori di K del regolatore che ci mostrano quanto appena affermato. on K =3,2 H 4 16 (1,2 1 s) (1 s,2) (1 s,2) (1,2 1 4 s) 1 H 1 Andata Andata 4 (1 s,2) (1 s,2) H 4,625 1 (1 s,2) (1 s,2) (1,2 1 4 s) on K =8 H 4 4 (1,2 1 s) (1 s,2) (1 s,2) (1,2 1 4 ) 25

7 12 Step Response From: U(1) 1 K=3,2 K=8 8 Amplitude To: Y(1) Time (sec.) L automatismo richiesto può essere presentato nel modo che segue: Attraverso il pulsante di marcia PM si avvia il nastro M1 che trasporta i prodotti. Quando il prodotto viene rilevato dal sensore LAV il nastro si ferma e si avvia una pompa, per la fase di lavaggio, per un tempo T1. Al termine di questa fase il nastro riparte. Quando il prodotto trasportato sarà rilevato dal sensore AS il nastro si ferma e si avvia una ventola, per l asciugatura, per un tempo T2. Al termine di questa fase il nastro riparte. Quando il prodotto sarà rilevato dal sensore SPI un pistone lo spingerà dentro una scatola per l imballaggio e rientrerà automaticamente quando uscirà dalla zona del sensore. Il sensore F di finecorsa del pistone incrementerà un contatore e quando saranno stati contati N prodotti, partirà un secondo nastro M2 che porterà via la scatola ormai piena. Quando la scotola incontra il sensore FI il nastro M2 si ferma. Si prevede un pulsante di stop ciclo in qualsiasi istante. Ipotizzando di usare il PL si può effettuare la programmazione con il linguaggio KOP o AWL oppure si può realizzare uno schema a contatti. Dopo aver predisposto la tabella delle assegnazioni. TABELLA DELLE ASSENAZIONI INRESSI FUNZIONE STATO LOIO INDIRIZZO PM Avvio N.O. - I. PS Stop N I.1 LAV. È il sensore posto sotto la stazione di lavaggio N.O. - I.2 AS. È il sensore posto sotto la stazione di asciugatura N.O. - I.3 SPI. È il sensore posto sotto il pistone di espulsione N.O. - I.4 F. È il sensore di finecorsa dello stello del cilindro N.O. - I.5 FI. È il sensore che arresta il motore del nastro 2. N.O. - I.6 USITE FUNZIONE INDIRIZZO M1 Nastro 1 Q. M2 Nastro 2 Q.1 Y Elettrovalvola Monostabile Q.2

8 Si può eseguire la programmazione in KOP e AWL KOP
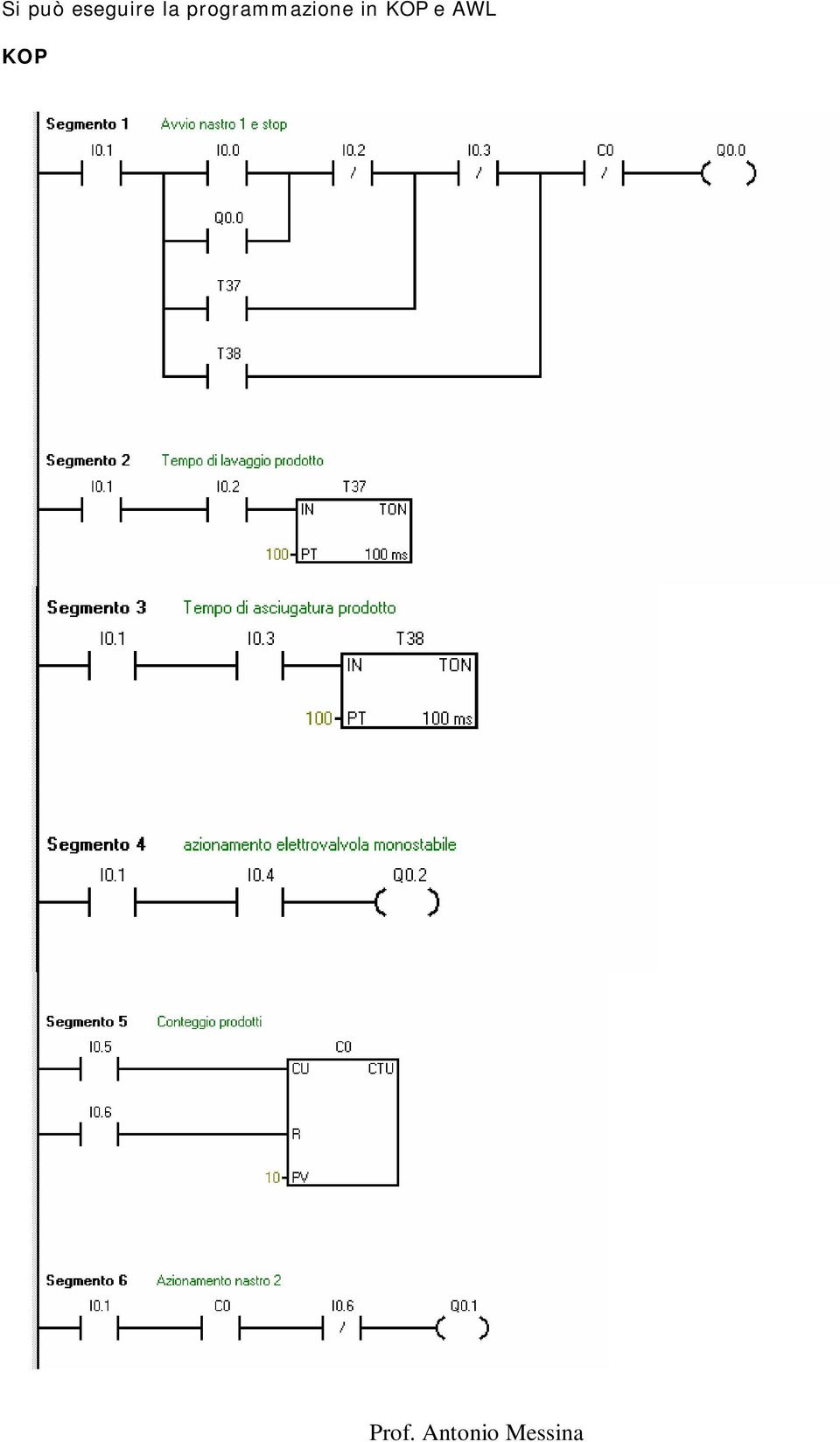
9 AWL Segmento 1 Avvio nastro 1 e stop LD I.1 LD I. O Q. AN I.2 O T37 AN I.3 O T38 ALD AN = Q. Segmento 2 Tempo di lavaggio prodotto LD I.1 A I.2 TON T37, 1 Segmento 3 Tempo di asciugatura prodotto LD I.1 A I.3 TON T38, 1 Segmento 4 azionamento elettrovalvola monostabile LD I.1 A I.4 = Q.2 Segmento 5 onteggio prodotti LD I.5 LD I.6 TU, 1 Segmento 6 Azionamento nastro 2 LD I.1 A AN I.6 = Q.1 ONTATTI +24V M1 T1 T2 LAV AS SPI F LAV 2 AS FI Y 1 3 F FI M1 T1 3 T2 3 Y 5 M2 V

2002 ISTITUTO PROFESSIONALE (indirizzo Tecnico per le Industrie Elettriche)
") 2002 ISTITUTO PROFESSIONALE (indirizzo Tecnico per le Industrie Elettriche) Tema di SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Un sistema a nastro trasportatore, azionato da un motore con funzione
2002 ISTITUTO PROFESSIONALE (indirizzo Tecnico per le Industrie Elettriche) Tema di SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Un sistema a nastro trasportatore, azionato da un motore con funzione
CORSO DI ORDINAMENTO. Tema di: SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE
 Sessione ordinaria 25 Seconda prova scritta M48 - ESME DI STTO DI ISTITUTO PROFESSIONLE CORSO DI ORDINMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI, UTOMZIONE E ORGNIZZZIONE DELL
Sessione ordinaria 25 Seconda prova scritta M48 - ESME DI STTO DI ISTITUTO PROFESSIONLE CORSO DI ORDINMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI, UTOMZIONE E ORGNIZZZIONE DELL
Dalle misure eseguite con un segnale sinusoidale su di un impianto si è verificato che esso:
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Ministero dell Istruzione, dell Università e della Ricerca M334 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE
 Ministero dell Istruzione, dell Università e della Ricerca M334 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTROTECNICA E AUTOMAZIONE Tema di: ELETTROTECNICA (Testo
Ministero dell Istruzione, dell Università e della Ricerca M334 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTROTECNICA E AUTOMAZIONE Tema di: ELETTROTECNICA (Testo
ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO. Indirizzo: ELETTROTECNICA E AUTOMAZIONE
 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTROTECNICA E AUTOMAZIONE Tema di: ELETTROTECNICA (Testo valevole per i corsi di ordinamento, per i corsi sperimentali
ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTROTECNICA E AUTOMAZIONE Tema di: ELETTROTECNICA (Testo valevole per i corsi di ordinamento, per i corsi sperimentali
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Margine di fase e margine di guadagno
 Margine di fase e margine di guadagno Prendiamo in considerazione sistemi per i uali la funzione ad anello aperto, L(s), sia stabile e non presenti dunue, poli a parte reale positiva. In tal caso il criterio
Margine di fase e margine di guadagno Prendiamo in considerazione sistemi per i uali la funzione ad anello aperto, L(s), sia stabile e non presenti dunue, poli a parte reale positiva. In tal caso il criterio
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CORSO di AUTOMAZIONE INDUSTRIALE
 CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO DI ORDINAMENTO. Tema di: SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE
 Sessione ordinaria Seconda prova scritta M48 - ESME DI STTO DI ISTITUTO PROFESSIONLE CORSO DI ORDINMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI, UTOMZIONE E ORGNIZZZIONE DELL PRODUZIONE
Sessione ordinaria Seconda prova scritta M48 - ESME DI STTO DI ISTITUTO PROFESSIONLE CORSO DI ORDINMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI, UTOMZIONE E ORGNIZZZIONE DELL PRODUZIONE
I.I.S. A. VOLTA FROSINONE. Seconda prova scritta - Simulazione ELETTRONICA ED ELETTROTECNICA
 Codice e Indirizzo : ITEC I.I.S. A. VOLTA FROSINONE Progetto Formazione personale docente per gli Esami di Stato (Interventi formativi di cui al D.M. n. 23/2013 e al D.M. n. 351/2014 USR Lazio) A.S. 2014/2015
Codice e Indirizzo : ITEC I.I.S. A. VOLTA FROSINONE Progetto Formazione personale docente per gli Esami di Stato (Interventi formativi di cui al D.M. n. 23/2013 e al D.M. n. 351/2014 USR Lazio) A.S. 2014/2015
CONTROLLORI STANDARD PID. Guido Vagliasindi Controlli Automatici A.A. 06/07 Controllori Standard PID
 ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
Esame di Stato di Istituto Tecnico Industriale A.S. 2004/2005
 Esame di Stato di Istituto Tecnico Industriale A.S. 2004/2005 Indirizzo: Elettrotecnica e automazione Tema di: Elettrotecnica Una macchina in corrente continua, funzionante da dinamo con eccitazione indipendente,
Esame di Stato di Istituto Tecnico Industriale A.S. 2004/2005 Indirizzo: Elettrotecnica e automazione Tema di: Elettrotecnica Una macchina in corrente continua, funzionante da dinamo con eccitazione indipendente,
CENNI SULLA STRUTTURA DEL LINGUAGGIO SFC (O GRAFCET) ED ESEMPI DI APPLICAZIONE
 ED ESEMPI DI APPLICAZIONE") Appunti Sistemi Automatici Pagina di 6 CENNI SULLA STRUTTURA DEL LINGUAGGIO SFC (O GRAFCET) ED ESEMPI DI APPLICAZIONE Struttura del linguaggio SFC e interpretazione Fase ( di partenza) Condizioni di transizione
Appunti Sistemi Automatici Pagina di 6 CENNI SULLA STRUTTURA DEL LINGUAGGIO SFC (O GRAFCET) ED ESEMPI DI APPLICAZIONE Struttura del linguaggio SFC e interpretazione Fase ( di partenza) Condizioni di transizione
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
CONTROLLO IN TENSIONE DI LED
 Applicazioni Ver. 1.1 INTRODUZIONE CONTROLLO IN TENSIONE DI LED In questo documento vengono fornite delle informazioni circa la possibilità di pilotare diodi led tramite una sorgente in tensione. La trattazione
Applicazioni Ver. 1.1 INTRODUZIONE CONTROLLO IN TENSIONE DI LED In questo documento vengono fornite delle informazioni circa la possibilità di pilotare diodi led tramite una sorgente in tensione. La trattazione
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
M049 - ESAME DI STATO DI ISTITUTO PROFESSIONALE. Indirizzo: TECNICO DELLE INDUSTRIE ELETTRONICHE CORSO DI ORDINAMENTO
 M049 - ESAME DI STATO DI ISTITUTO PROFESSIONALE Indirizzo: TECNICO DELLE INDUSTRIE ELETTRONICHE CORSO DI ORDINAMENTO Tema di: ELETTRONICA, TELECOMUNICAZIONI E APPLICAZIONI Il candidato, formulando eventuali
M049 - ESAME DI STATO DI ISTITUTO PROFESSIONALE Indirizzo: TECNICO DELLE INDUSTRIE ELETTRONICHE CORSO DI ORDINAMENTO Tema di: ELETTRONICA, TELECOMUNICAZIONI E APPLICAZIONI Il candidato, formulando eventuali
POSSIBILE SOLUZIONE. Comando. Trasduttore G T
 POSSIBILE SOLUZIONE Innanzitutto disegniamo lo schema a blocchi del sistema. Vr Regolatore P Comando 4 G( (1 1,25s ) Controllo (serbatoio) 5 G( (1 12,5 Vb - Trasduttore G T Cominciamo a calcolare la f.d.t.
POSSIBILE SOLUZIONE Innanzitutto disegniamo lo schema a blocchi del sistema. Vr Regolatore P Comando 4 G( (1 1,25s ) Controllo (serbatoio) 5 G( (1 12,5 Vb - Trasduttore G T Cominciamo a calcolare la f.d.t.
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati
 Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Fondamenti di Automatica - I Parte Il progetto del controllore
 Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Prof. A. Bemporad, Ing. S. Di Cairano 26 Maggio 2005. Esercitazione di Tecnologia dei Sistemi di Controllo
 Università degli Studi di Siena Prof. A. Bemporad, Ing. S. Di Cairano 26 Maggio 2005 Esercitazione di Tecnologia dei Sistemi di Controllo Implementazione di controllori con xpc target Questa esercitazione
Università degli Studi di Siena Prof. A. Bemporad, Ing. S. Di Cairano 26 Maggio 2005 Esercitazione di Tecnologia dei Sistemi di Controllo Implementazione di controllori con xpc target Questa esercitazione
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
M272 - ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE
 Pag. 1/2 Sessione ordinaria 2006 Seconda prova scritta M272 - ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTRONICA E TELECOMUNICAZIONI Tema di: SISTEMI ELETTRONICI
Pag. 1/2 Sessione ordinaria 2006 Seconda prova scritta M272 - ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTRONICA E TELECOMUNICAZIONI Tema di: SISTEMI ELETTRONICI
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
CONTROLLO DI GESTIONE DELLO STUDIO
 CONTROLLO DI GESTIONE DELLO STUDIO Con il controllo di gestione dello studio il commercialista può meglio controllare le attività svolte dai propri collaboratori dello studio nei confronti dei clienti
CONTROLLO DI GESTIONE DELLO STUDIO Con il controllo di gestione dello studio il commercialista può meglio controllare le attività svolte dai propri collaboratori dello studio nei confronti dei clienti
Ministero dell Istruzione, dell Università e della Ricerca
 Pag. 1/11 Sessione ordinaria 2015 Il candidato svolga la prima parte della prova e risponda a due tra i quesiti proposti nella seconda parte. PRIMA PARTE SISTEMA DI CONTROLLO E TRATTAMENTO DEI GAS DI SCARICO
Pag. 1/11 Sessione ordinaria 2015 Il candidato svolga la prima parte della prova e risponda a due tra i quesiti proposti nella seconda parte. PRIMA PARTE SISTEMA DI CONTROLLO E TRATTAMENTO DEI GAS DI SCARICO
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Mon Ami 3000 Produzione interna/esterna Gestione della produzione interna/esterna
 Mon Ami 3000 Produzione interna/esterna Gestione della produzione interna/esterna Introduzione Questa guida illustra tutte le funzioni e le procedure da eseguire per gestire correttamente un ciclo di produzione
Mon Ami 3000 Produzione interna/esterna Gestione della produzione interna/esterna Introduzione Questa guida illustra tutte le funzioni e le procedure da eseguire per gestire correttamente un ciclo di produzione
PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte
 PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte Prima Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi
PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte Prima Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi
Posizione dei componenti Vedi figura 1 e fare riferimento alla tabella 1.
 Cambio del contenitore Rhino XD2H per sistemi a uretano con controllo a due mani Posizione dei componenti Vedi figura 1 e fare riferimento alla tabella 1. 1 6 5 2 4 3 Figura 1 Posizione dei componenti
Cambio del contenitore Rhino XD2H per sistemi a uretano con controllo a due mani Posizione dei componenti Vedi figura 1 e fare riferimento alla tabella 1. 1 6 5 2 4 3 Figura 1 Posizione dei componenti
CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO. Programma d'esame. Temi d'esame proposti in precedenti concorsi
 CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Programma d'esame CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Temi d'esame proposti in precedenti concorsi CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO
CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Programma d'esame CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO Temi d'esame proposti in precedenti concorsi CLASSE 32/C - LABORATORIO MECCANICO-TECNOLOGICO
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
FASI DA ESEGUIRE ON-LINE
 FASI DA ESEGUIRE ON-LINE a) registrazione del candidato mediante apposito link presente sul portale della Regione Basilicata e rilascio delle credenziali di accesso necessarie per procedere alla candidatura
FASI DA ESEGUIRE ON-LINE a) registrazione del candidato mediante apposito link presente sul portale della Regione Basilicata e rilascio delle credenziali di accesso necessarie per procedere alla candidatura
1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti.
. Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti.") SOLUZIONE TEMA MINISTERIALE TECNICO DELLE INDUSTRIE ELETTRICHE ED ELETTRONICHE 2012 1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti. L impianto elettrico a
SOLUZIONE TEMA MINISTERIALE TECNICO DELLE INDUSTRIE ELETTRICHE ED ELETTRONICHE 2012 1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti. L impianto elettrico a
LINEE GUIDA PER LO SCARICO PEC IN P.I.Tre
 LINEE GUIDA PER LO SCARICO PEC IN P.I.Tre SOMMARIO Il protocollo in arrivo a mezzo Interoperabilita PEC 2 Controllo dello scarico PEC 4 Miglioramento delle prestazioni dello scarico PEC in P.I.Tre 5 Introduzione
LINEE GUIDA PER LO SCARICO PEC IN P.I.Tre SOMMARIO Il protocollo in arrivo a mezzo Interoperabilita PEC 2 Controllo dello scarico PEC 4 Miglioramento delle prestazioni dello scarico PEC in P.I.Tre 5 Introduzione
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Manuale Operativo per la Compilazione dei Questionari di Valutazione della Didattica
 Università degli Studi di Messina Area Sistema Informativo per l'analisi dei Dati e Calcolo Scientifico Settore Supporto Informatico per l'analisi Decisionale di Ateneo Manuale Operativo per la Compilazione
Università degli Studi di Messina Area Sistema Informativo per l'analisi dei Dati e Calcolo Scientifico Settore Supporto Informatico per l'analisi Decisionale di Ateneo Manuale Operativo per la Compilazione
Tabelle di riferimento Pulsanti Inserire documento Predisposizione doc Approvazione Doc Numerazione Doc Pubblicazione Albo Webservice
 - Albo pretorio virtuale e gestione della consultazione documentale - Argomenti Tabelle di riferimento Pulsanti Inserire documento Predisposizione doc Approvazione Doc Numerazione Doc Pubblicazione Albo
- Albo pretorio virtuale e gestione della consultazione documentale - Argomenti Tabelle di riferimento Pulsanti Inserire documento Predisposizione doc Approvazione Doc Numerazione Doc Pubblicazione Albo
EASY GATE SYSTEM. INSTALLATORE QUALIFICATO Lezione 3 Parte A DIVISIONE TECNICA CORSO DI. nnovazioni Srl. www.easygate.eu
 S I pazio nnovazioni Srl DIVISIONE TECNICA www.easygate.eu SETTORE AUTOMAZIONI Via Roma, 92-35010 Limena PD - Tel. 049 2956552 - Fax 049 7969561 - info@easygate.eu EASY GATE SYSTEM CORSO DI INSTALLATORE
S I pazio nnovazioni Srl DIVISIONE TECNICA www.easygate.eu SETTORE AUTOMAZIONI Via Roma, 92-35010 Limena PD - Tel. 049 2956552 - Fax 049 7969561 - info@easygate.eu EASY GATE SYSTEM CORSO DI INSTALLATORE
MANUALE D USO E MANUTENZIONE
 MANUALE D USO E MANUTENZIONE ALIMENTATORE FIBRE 40018 San Pietro in casale BO Via Parma, 103 Tel. 051 811144 fax 051 6668231 www.fibrocev.it Email: fibrocev@fibrocev.it INTRODUZIONE Per una comoda consultazione
MANUALE D USO E MANUTENZIONE ALIMENTATORE FIBRE 40018 San Pietro in casale BO Via Parma, 103 Tel. 051 811144 fax 051 6668231 www.fibrocev.it Email: fibrocev@fibrocev.it INTRODUZIONE Per una comoda consultazione
ESERCITAZIONE (7-11-13) Ing. Stefano Botelli
 Ing. Stefano Botelli") FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
REGOLAMENTO TENNIS STAR
 REGOLAMENTO TENNIS STAR Slot machine a 5 rulli e 40 linee Lo scopo del gioco Tennis Star è ottenere una combinazione vincente di simboli dopo la rotazione dei rulli. Per giocare: Il valore del gettone
REGOLAMENTO TENNIS STAR Slot machine a 5 rulli e 40 linee Lo scopo del gioco Tennis Star è ottenere una combinazione vincente di simboli dopo la rotazione dei rulli. Per giocare: Il valore del gettone
Corso di orientamento. Indirizzo: ELETTRONICA E TELECOMUNICAZIONI
 M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Corso di orientamento Indirizzo: ELETTRONICA E TELECOMUNICAZIONI Tema di: ELETTRONICA (Testo valevole per i corsi di ordinamento e per i corsi sperimentali
M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Corso di orientamento Indirizzo: ELETTRONICA E TELECOMUNICAZIONI Tema di: ELETTRONICA (Testo valevole per i corsi di ordinamento e per i corsi sperimentali
7.2 Controlli e prove
 7.2 Controlli e prove Lo scopo dei controlli e delle verifiche è quello di: assicurare che l ascensore sia stato installato in modo corretto e che il suo utilizzo avvenga in modo sicuro; tenere sotto controllo
7.2 Controlli e prove Lo scopo dei controlli e delle verifiche è quello di: assicurare che l ascensore sia stato installato in modo corretto e che il suo utilizzo avvenga in modo sicuro; tenere sotto controllo
Diagrammi polari, di Nyquist e di Nichols
 Diagrammi polari, di Nyquist e di Nichols Definizione (1/2) Il diagramma di Nichols (DdNic) di una fdt consiste nella rappresentazione grafica di G(s) s= jω = G(jω) = M( ω)e jϕ( ω), per ω (, ) sul piano
Diagrammi polari, di Nyquist e di Nichols Definizione (1/2) Il diagramma di Nichols (DdNic) di una fdt consiste nella rappresentazione grafica di G(s) s= jω = G(jω) = M( ω)e jϕ( ω), per ω (, ) sul piano
Esercizio 20 - tema di meccanica applicata e macchine a fluido- 2002
 Esercizio 0 - tema di meccanica applicata e macchine a fluido- 00 er regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull albero di trasmissione del motore un volano in ghisa.
Esercizio 0 - tema di meccanica applicata e macchine a fluido- 00 er regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull albero di trasmissione del motore un volano in ghisa.
PROCESSI PRODUTTIVI E LOGISTICA I.T.S.T J.F. KENNEDY - PN
 PROCESSI PRODUTTIVI E LOGISTICA I.T.S.T J.F. KENNEDY - PN A.S. 2014/15 Innovazione e ciclo di vita di un prodotto La progettazione di un prodotto e di conseguenza il suo processo produttivo dipende dalla
PROCESSI PRODUTTIVI E LOGISTICA I.T.S.T J.F. KENNEDY - PN A.S. 2014/15 Innovazione e ciclo di vita di un prodotto La progettazione di un prodotto e di conseguenza il suo processo produttivo dipende dalla
REGOLE PER L ESAME (agg.te settembre 2015)
") Informatica e Programmazione (9 CFU) Ingegneria Meccanica e dei Materiali REGOLE PER L ESAME (agg.te settembre 2015) Modalità d esame (note generali) Per superare l esame, lo studente deve sostenere due
Informatica e Programmazione (9 CFU) Ingegneria Meccanica e dei Materiali REGOLE PER L ESAME (agg.te settembre 2015) Modalità d esame (note generali) Per superare l esame, lo studente deve sostenere due
Manuale d uso per la raccolta: Sicurezza degli impianti di utenza a gas - Postcontatore
 Manuale d uso per la raccolta: Sicurezza degli impianti di utenza a gas - Postcontatore 1. Obbligo di comunicazione dei dati... 2 2. Accesso alla raccolta... 2 3. Compilazione... 6 2.1 Dati generali Sicurezza
Manuale d uso per la raccolta: Sicurezza degli impianti di utenza a gas - Postcontatore 1. Obbligo di comunicazione dei dati... 2 2. Accesso alla raccolta... 2 3. Compilazione... 6 2.1 Dati generali Sicurezza
Sistemi di controllo industriali
 Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
SPORTELLO UNICO DELLE ATTIVITÀ PRODUTTIVE MANUALE OPERATIVO FUNZIONI DI SCRIVANIA PER GLI UFFICI SUAP
 InfoCamere Società Consortile di Informatica delle Camere di Commercio Italiane per azioni SPORTELLO UNICO DELLE ATTIVITÀ PRODUTTIVE MANUALE OPERATIVO FUNZIONI DI SCRIVANIA PER GLI UFFICI SUAP versione
InfoCamere Società Consortile di Informatica delle Camere di Commercio Italiane per azioni SPORTELLO UNICO DELLE ATTIVITÀ PRODUTTIVE MANUALE OPERATIVO FUNZIONI DI SCRIVANIA PER GLI UFFICI SUAP versione
Il sensore rilevatore di presenza modalità d uso
 SENSORE RILEVATORE DI PRESENZA Il sensore rilevatore di presenza modalità d uso I moduli pic-sms seriali e le versioni professionali con gsm integrato sono di fatto anche dei veri e propri sistemi d allarme
SENSORE RILEVATORE DI PRESENZA Il sensore rilevatore di presenza modalità d uso I moduli pic-sms seriali e le versioni professionali con gsm integrato sono di fatto anche dei veri e propri sistemi d allarme
Principali comandi MATLAB utili per il corso di Controlli Automatici
 Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Esercizio 9 Controllo temperatura, umidità e luminosità all interno di una serra
 Esercizio 9 Controllo temperatura, umidità e luminosità all interno di una serra Si desidera controllare i valori di temperatura, umidità e luminosità all interno di una serra. I valori vengono rilevati
Esercizio 9 Controllo temperatura, umidità e luminosità all interno di una serra Si desidera controllare i valori di temperatura, umidità e luminosità all interno di una serra. I valori vengono rilevati
Sistema di controllo per iniezione sequenziale, montato su carrello
 Sistema di controllo per iniezione sequenziale, montato su carrello Componenti: "Sequentia" SE802E + Minicentrale oleodinamica F014/0050 F014/0050-IT Rev.0-15/12/2014 Pg. 1/5 Minicentrale oleodinamica
Sistema di controllo per iniezione sequenziale, montato su carrello Componenti: "Sequentia" SE802E + Minicentrale oleodinamica F014/0050 F014/0050-IT Rev.0-15/12/2014 Pg. 1/5 Minicentrale oleodinamica
IL MODULO CAUZIONI A&D srl
 IL MODULO CAUZIONI 1 Sommario 1. INTRODUZIONE ALLE CAUZIONI... 3 2. CAUZIONI LEGATE AD UN DOCUMENTO... 3 1.1. GESTIONE CAUZIONI IN USCITA RIFERIMENTO AD UN DOCUMENTO (ORDINE)... 3 1.2. GESTIONE CAUZIONI
IL MODULO CAUZIONI 1 Sommario 1. INTRODUZIONE ALLE CAUZIONI... 3 2. CAUZIONI LEGATE AD UN DOCUMENTO... 3 1.1. GESTIONE CAUZIONI IN USCITA RIFERIMENTO AD UN DOCUMENTO (ORDINE)... 3 1.2. GESTIONE CAUZIONI
TAU S.r.l. Linee guida per le automazioni, secondo le nuove norme europee EN 13241-1, EN 12445 ed EN 12453
 TAU S.r.l. Linee guida per le automazioni, secondo le nuove norme europee EN 13241-1, EN 12445 ed EN 12453 Dal 31 maggio 2001, gli impianti per cancelli automatici ad uso promiscuo (carrabile-pedonale)
TAU S.r.l. Linee guida per le automazioni, secondo le nuove norme europee EN 13241-1, EN 12445 ed EN 12453 Dal 31 maggio 2001, gli impianti per cancelli automatici ad uso promiscuo (carrabile-pedonale)
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Introduzione. Margine di ampiezza... 2 Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di Bode... 6
 ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
Gestione energetica. Dario Freddi Traduzione della documentazione: Federico Zenith
 Dario Freddi Traduzione della documentazione: Federico Zenith 2 Indice 1 PowerDevil, un demone per la gestione energetica 4 1.1 Impostazioni di risparmio energetico........................... 4 1.2 Impostazioni
Dario Freddi Traduzione della documentazione: Federico Zenith 2 Indice 1 PowerDevil, un demone per la gestione energetica 4 1.1 Impostazioni di risparmio energetico........................... 4 1.2 Impostazioni
M841 ESAME DI STATO DI ISTRUZIONE SECONDARIA SUPERIORE. Indirizzo: IPM9 MANUTENZIONE E ASSISTENZA TECNICA CURVATURA MECCANICA
 Pag. 1/5 Sessione ordinaria 2015 A T T E N Z I O N E La presente prova è costituita dalle seguenti tracce relative a: IPM9 MANUTENZIONE E ASSISTENZA TECNICA IPS9 MANUTENZIONE E ASSISTENZA TECNICA Si invita
Pag. 1/5 Sessione ordinaria 2015 A T T E N Z I O N E La presente prova è costituita dalle seguenti tracce relative a: IPM9 MANUTENZIONE E ASSISTENZA TECNICA IPS9 MANUTENZIONE E ASSISTENZA TECNICA Si invita
M842 ESAME DI STATO DI ISTRUZIONE SECONDARIA SUPERIORE. Indirizzo: IPS9 - MANUTENZIONE E ASSISTENZA TECNICA CURVATURA SISTEMI ENERGETICI
 Pag. 1/5 Sessione ordinaria 2015 A T T E N Z I O N E La presente prova è costituita dalle seguenti tracce relative a: IPS9 MANUTENZIONE E ASSISTENZA TECNICA IPM9 MANUTENZIONE E ASSISTENZA TECNICA Si invita
Pag. 1/5 Sessione ordinaria 2015 A T T E N Z I O N E La presente prova è costituita dalle seguenti tracce relative a: IPS9 MANUTENZIONE E ASSISTENZA TECNICA IPM9 MANUTENZIONE E ASSISTENZA TECNICA Si invita
siamo partiti dalle scuole per arrivare a tutti i cittadini!
 siamo partiti dalle scuole per arrivare a tutti i cittadini! COME E STATO FATTO IL BILANCIO ENERGETICO? Per effettuare il bilancio energetico è stato necessario conoscere e valutare tutti i consumi energetici
siamo partiti dalle scuole per arrivare a tutti i cittadini! COME E STATO FATTO IL BILANCIO ENERGETICO? Per effettuare il bilancio energetico è stato necessario conoscere e valutare tutti i consumi energetici
Progetto NoiPA per la gestione giuridicoeconomica del personale delle Aziende e degli Enti del Servizio Sanitario della Regione Lazio
 Progetto NoiPA per la gestione giuridicoeconomica del personale delle Aziende e degli Enti del Servizio Sanitario della Regione Lazio Pillola operativa Integrazione Generazione Dettagli Contabili INFORMAZIONI
Progetto NoiPA per la gestione giuridicoeconomica del personale delle Aziende e degli Enti del Servizio Sanitario della Regione Lazio Pillola operativa Integrazione Generazione Dettagli Contabili INFORMAZIONI
INDICE. Assessorato turismo, sport, commercio e trasporti Infrastrutture funiviarie
 INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
Product Shipping Cost Guida d'installazione ed Utilizzo
 Guida d'installazione ed Utilizzo Installazione Per installare il modulo è sufficiente copiare la cartella app del pacchetto del modulo nella cartella principale dell'installazione di Magento dove è già
Guida d'installazione ed Utilizzo Installazione Per installare il modulo è sufficiente copiare la cartella app del pacchetto del modulo nella cartella principale dell'installazione di Magento dove è già
Il luogo delle radici (ver. 1.0)
") Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
Ambulatorio Virtuale Medinformatica Sistema On Line per richiedere Appuntamenti e Ricette
 Ambulatorio Virtuale Medinformatica Sistema On Line per richiedere Appuntamenti e Ricette Egregio Dottore, Gentile Dottoressa, abbiamo il piacere di presentarle il nuovo sistema informatico per la gestione
Ambulatorio Virtuale Medinformatica Sistema On Line per richiedere Appuntamenti e Ricette Egregio Dottore, Gentile Dottoressa, abbiamo il piacere di presentarle il nuovo sistema informatico per la gestione
Sistemi Automazione (specialistica) Si consideri un convoglio composto da vagoni di massa m connessi da molle con constante elastica K.
 Si consideri un convoglio composto da vagoni di massa m connessi da molle con constante elastica K.") Sistemi Automazione (specialistica) Si consideri un convoglio composto da vagoni di massa m connessi da molle con constante elastica K. Il candidato descriva il modello matematico del sistema, le metodologie
Sistemi Automazione (specialistica) Si consideri un convoglio composto da vagoni di massa m connessi da molle con constante elastica K. Il candidato descriva il modello matematico del sistema, le metodologie
GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012
 GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012 L unità di Milano Città Studi del Centro matematita propone anche per l a.s. 2011-2012 una serie di problemi pensati per
GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012 L unità di Milano Città Studi del Centro matematita propone anche per l a.s. 2011-2012 una serie di problemi pensati per
MIUR Concorso Personale Docente 2016
 Livello di classificazione: CONFIDENZIALE Destinatari del documento: CINECA Concorso Personale Docente 2016 Istruzioni per le prove scritte Data Versione Approvazione 24/02/2016 01 Rosa De Pasquale Francesca
Livello di classificazione: CONFIDENZIALE Destinatari del documento: CINECA Concorso Personale Docente 2016 Istruzioni per le prove scritte Data Versione Approvazione 24/02/2016 01 Rosa De Pasquale Francesca
FASI DA ESEGUIRE ON-LINE
 FASI DA ESEGUIRE ON-LINE a) registrazione del candidato mediante apposito link presente sul portale della Regione Basilicata e rilascio delle credenziali di accesso necessarie per procedere alla candidatura
FASI DA ESEGUIRE ON-LINE a) registrazione del candidato mediante apposito link presente sul portale della Regione Basilicata e rilascio delle credenziali di accesso necessarie per procedere alla candidatura
RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000
 RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 DESCRIZIONE GENERALE L espansore senza fili è un modulo
RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 DESCRIZIONE GENERALE L espansore senza fili è un modulo
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Isola di foratura. Il linguaggio SFC. Esercizi. Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 1
 Il linguaggio SFC Esercizi Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 1 Isola di foratura Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 2 Isola di foratura
Il linguaggio SFC Esercizi Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 1 Isola di foratura Prof. P. Levi - Laboratorio di Informatica Industriale - Esercizi SFC 2 Isola di foratura
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
Basetta per misure su amplificatori
 Basetta per misure su amplificatori Per le misure viene utilizzata una basetta a circuito stampato premontata, che contiene due circuiti (amplificatore invertente e noninvertente). Una serie di interruttori
Basetta per misure su amplificatori Per le misure viene utilizzata una basetta a circuito stampato premontata, che contiene due circuiti (amplificatore invertente e noninvertente). Una serie di interruttori
ELETTRONICA Tema di Sistemi elettronici automatici Soluzione
 ELETTRONICA Tema di Sistemi elettronici automatici Soluzione La traccia presenta lo sviluppo di un progetto relativo al monitoraggio della temperatura durante un processo di produzione tipico nelle applicazione
ELETTRONICA Tema di Sistemi elettronici automatici Soluzione La traccia presenta lo sviluppo di un progetto relativo al monitoraggio della temperatura durante un processo di produzione tipico nelle applicazione
Infostat-UIF. Istruzioni per l accesso e le autorizzazioni
 Infostat-UIF Istruzioni per l accesso e le autorizzazioni Versione 1.2 1 INDICE 1. Istruzioni operative per l'utilizzo dei servizi Infostat-UIF... 3 2. Registrazione al portale Infostat-UIF... 4 2.1. Caso
Infostat-UIF Istruzioni per l accesso e le autorizzazioni Versione 1.2 1 INDICE 1. Istruzioni operative per l'utilizzo dei servizi Infostat-UIF... 3 2. Registrazione al portale Infostat-UIF... 4 2.1. Caso
Considerazioni sulle specifiche.
 # SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
# SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE
 M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE CORSO DI ORDINAMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Sessione d esame: 2013
M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE CORSO DI ORDINAMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Sessione d esame: 2013
Installazione di Zelio Soft 2 su Microsoft Windows Vista
 Installazione di Zelio Soft 2 su Microsoft Windows Vista 1. Installazione di Zelio Soft 2 v4.1: Per prima cosa installare Zelio Soft 2 (versione 4.1) lanciandone il setup (doppio click sul file Setup.exe
Installazione di Zelio Soft 2 su Microsoft Windows Vista 1. Installazione di Zelio Soft 2 v4.1: Per prima cosa installare Zelio Soft 2 (versione 4.1) lanciandone il setup (doppio click sul file Setup.exe
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria
 ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE PRIMA PROVA SCRITTA DEL 22 giugno 2011 SETTORE DELL INFORMAZIONE Tema n. 1 Il candidato sviluppi un analisi critica e discuta
ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE PRIMA PROVA SCRITTA DEL 22 giugno 2011 SETTORE DELL INFORMAZIONE Tema n. 1 Il candidato sviluppi un analisi critica e discuta
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
Installazione Tooway. Guida veloce all installazione del servizio Tooway
 1 Installazione Tooway Guida veloce all installazione del servizio Tooway 2 INDICE 1. Materiale richiesto 2. Identificazione dati per puntamento 3. Assemblaggio Kit 4. Preparazione al puntamento 5. Puntamento
1 Installazione Tooway Guida veloce all installazione del servizio Tooway 2 INDICE 1. Materiale richiesto 2. Identificazione dati per puntamento 3. Assemblaggio Kit 4. Preparazione al puntamento 5. Puntamento