TECNICHE DI CONTROLLO
|
|
|
- Ugo Andreoli
- 7 anni fa
- Visualizzazioni
Transcript
1 TECNICHE DI CONTROLLO Richiami di Teoria dei Sistemi Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Sistemi e Modelli

2 Concetto di Sistema Sistema: insieme, artificialmente isolato dal contesto, costituito da più parti tra loro interagenti di cui si vuole indagare il comporamento Attributo misurabile: caratteristica che può essere messa in relazione con un insieme di simboli o numeri (interi, reali, complessi) Modello matematico: equazioni che descrivono le relazioni tra gli attributi misurabili. Causa Effetto Es.: Motore.. o generatore?

3 Sistemi e Dinamica Sistemi e Dinamica y(t)
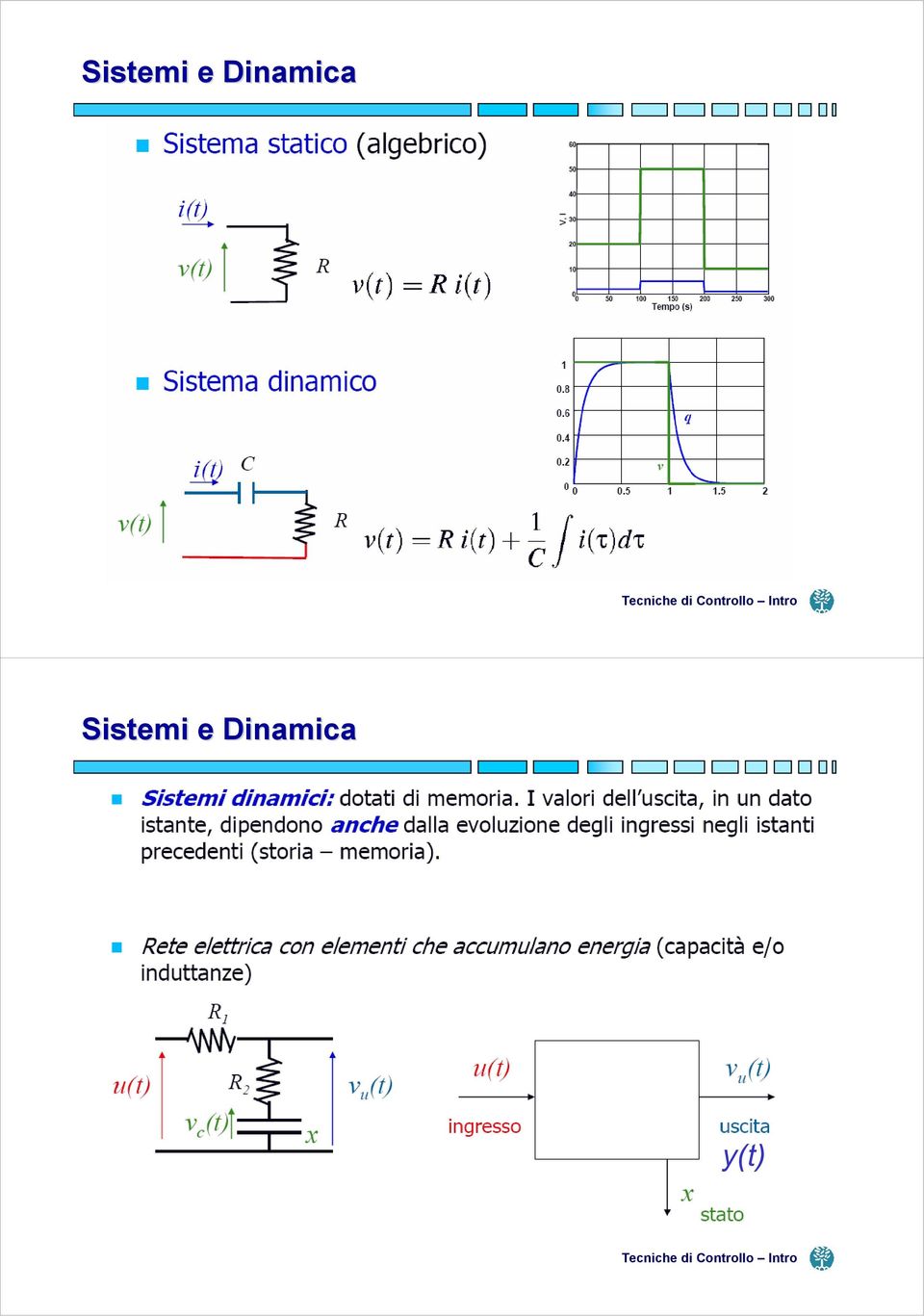
4 Considerazioni energetiche Lo stato è l informazione sulla situazione interna di un sistema, necessaria per predire l effetto della sua storia passata sul suo comportamento futuro. Lo stato nei sistemi fisici è determinato dall accumulo di energia (quantità di moto, energia potenziale, carica elettrica, ecc.) La scelta delle variabili di stato per la modellazione matematica è comunque arbitraria e non univoca! Considerazioni energetiche In ogni dominio fisico ci sono sempre UNO o DUE elementi che caratterizzano l accumulo di energia Elettrico: capacità (C) e induttanza (L) Meccanico traslante: massa (M) e reciproco della rigidità (1/K) Meccanico rotante: momento di inerzia (J) e reciproco della rigidità torsionale (1/K) Fluidico: capacità fluidica (Cf) e induttanza fluidica (Lf) Termico: capacità termica (Ct)
 e induttanza (L) Meccanico traslante: massa (M) e")
5 Considerazioni energetiche Modelli matematici analitici: equazioni differenziali

6 Modelli matematici analitici: equazioni differenziali I vettori sono, rispettivamente, i vettori di Stato: Ingresso: Uscita: x(t) X, X=R n u(t) U, U=R m y(t) Y, Y=R p all istante t T=R Modelli matematici analitici: equazioni differenziali Compattando la notazione, scriveremo le equazioni che rappresentano un sistema regolare come: dove x(t), u(t) e y(t) sono vettori e f e g sono vettori di funzioni. f è detta funzione di velocità di transizione dello stato g è detta funzione di uscita Il sistema descritto è di dimensione n con m ingressi e p uscite.

7 Tipologie di sistemi Si possono distinguere, in base al numero di ingressi e di uscite, i seguenti tipi di sistema: MIMO (Multiple Input Multiple Output): sistema con m (>1) ingressi e p (>1) uscite MISO (Multiple Input Single Output): sistema con m (>1) ingressi e un uscita sola (p=1) SIMO (Single Input Multiple Output): sistema con un solo ingresso (m=1) e p (>1) uscite SISO (Single Input Single Output): sistema con un solo ingresso (m=1) e una sola uscita (p=1) Classificazione dei modelli
: sistema con un solo ingresso (m=1) e una sola uscita (p=1) Classificazione dei")
8 La classe di modelli più... apprezzata! La classe di modelli più... apprezzata! Matrice Quadrata NB: se il sistema è puramente dinamico D = 0

9 Rappresentazioni equivalenti Introducendo il concetto di stato, abbiamo detto che NON esiste un modo unico di scegliere le variabili di stato per rappresentare un sistema dinamico. Per un sistema LTI, una volta scelta una base per X=R n, U=R m e Y=R p e scelte le variabili di stato, esso è rappresentato da: Consideriamo una matrice n x n T costante e non singolare e mediante un cambio di variabili definiamo un nuovo vettore di stato x come: Rappresentazioni equivalenti Sostituendo nelle equazioni di partenza si ottiene: Il sistema LTI rappresentato da queste equazioni è equivalente al sistema LTI di partenza nel senso che per un ingresso u(t), t 0, e due stati iniziali legati dalla condizione Le funzioni dello stato x(t) e z(t) sono legate dalla relazione e le uscite sono identiche.
, t 0, e due stati iniziali legati dalla condizione Le funzioni dello stato x(t) e z(t) sono legate dalla relazione e le")
10 Analisi dei sistemi Analisi del moto o della risposta: soluzione delle equazioni differenziali per determinare il moto di x o la risposta di y, dato u. Analisi della stabilità: verifica di come le variazioni limitate sul valore iniziale di x e sulla funzione di u influenzino il moto di x o la risposta di y. Analisi della controllabilità: verifica delle possibilità di influire su x e y, agendo opportunamente su u Analisi dell osservabilità: verifica delle possibilità di determinare x, note le funzioni di y e u Movimento (o moto), traiettoria ed equilibrio Traiettoria x 0 T (t 0,x 0 ) (t 1,x 1 ) Movimento x 1 x 2 (t 2,x 2 ) (t 3,x 2 ) (t 4,x 2 ) X
, traiettoria ed equilibrio Traiettoria x 0 T (t 0,x 0 ) (t 1,x 1 ) Movimento x 1 x 2 (t 2,x 2 ) (t")
11 Perchè apprezzare i sistemi lineari stazionari (LTI) Per i sistemi lineari stazionari o Lineari Tempo-Invarianti (LTI) le analisi citate si effettuano con semplici risultati di algebra lineare Dato: La soluzione dell equazione è data dalla formula di Lagrange : Moto libero + moto forzato Inoltre, vale il principio della sovrapposizione degli effetti Esponenziale di matrice La formula di Lagrange si basa sull esponenziale di matrice, calcolabile come estensione della funzione esponenziale scalare (tramite espansione in serie): Analogamente, è possibile definire l esponenziale di una matrice come:
: Analogamente, è possibile definire l esponenziale di una matrice")
12 Esponenziale di matrice e modi I movimenti liberi e forzati sono combinazioni lineari di funzioni esponenziali di base, dette modi, il cui andamento dipende dagli autovalori di A e dalla loro molteplicità Es. con autovalori singoli Esponenziale di matrice e modi Es. con autovalori doppi

13 Sistemi a tempo discreto Si ottengono ad esempio (MA NON SOLO) quando un sistema a tempo continuo viene accoppiato ad un elaboratore digitale Sistemi a tempo discreto Se si considera che all ingresso venga applicata una funziona costante a tratti e che l uscita venga campionata negli stessi istanti kt in cui l ingresso varia

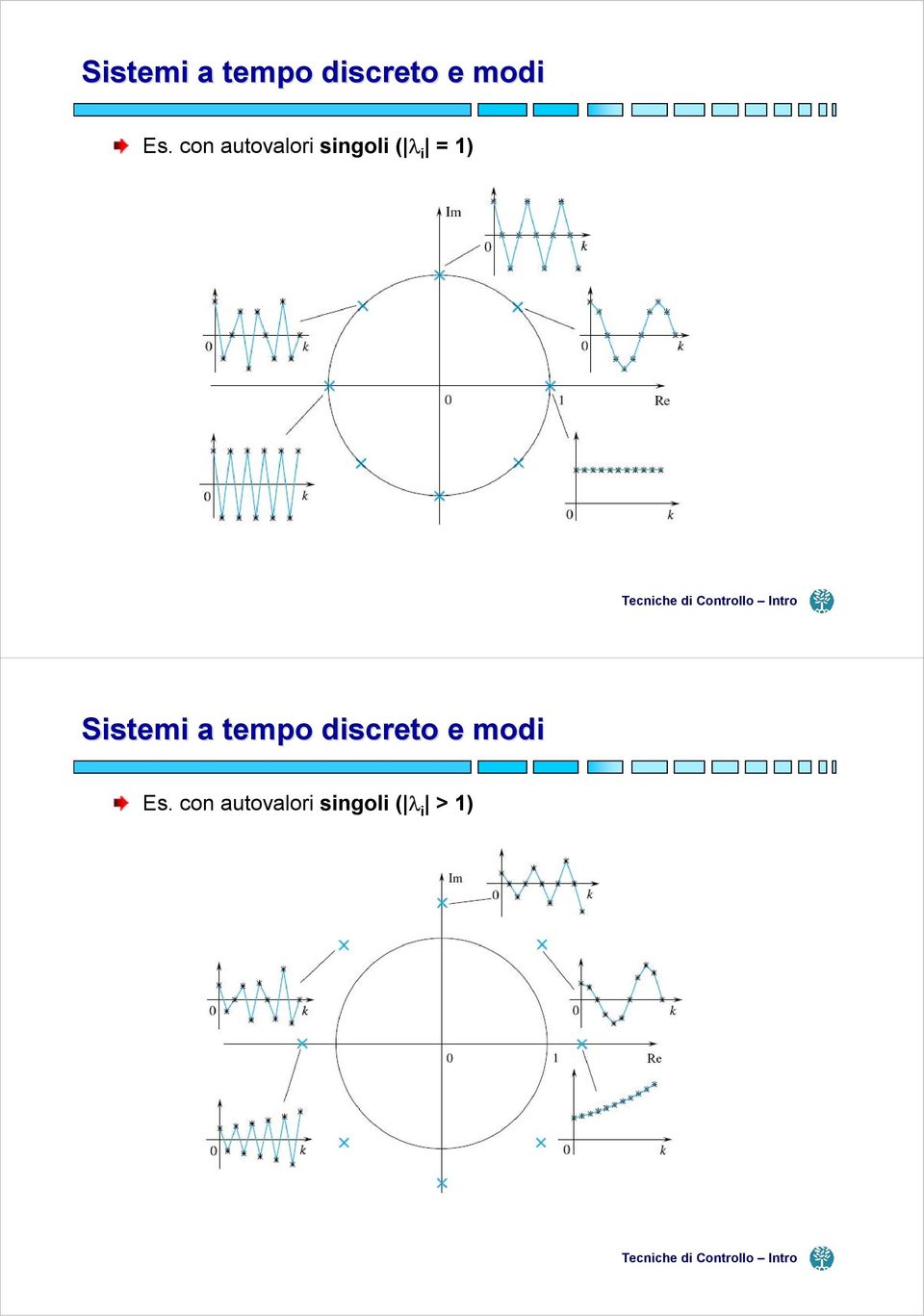
14 Sistemi a tempo discreto In generale, comunque si arrivi al modello MIMO il movimento si può calcolare direttamente e in modo ancora più intuitivo: Sistemi a tempo discreto e modi Sempre in funzione degli autovalori di A, ma... è diversa la relazione con la collocazione sul piano complesso, rispetto al tempo continuo Es. con autovalori singoli ( λ i < 1)

15 Sistemi a tempo discreto e modi Es. con autovalori singoli ( λ i = 1) Sistemi a tempo discreto e modi Es. con autovalori singoli ( λ i > 1)
16 Sistemi a tempo discreto e modi Es. con autovalori doppi ( λ i < 1) Stabilità In generale, si analizza la stabilità dei punti di equilibrio e/o dei movimenti di un sistema dinamico [DEF.] Un movimento si dice semplicemente stabile se ε>0 δ> 0 t.c. x(t 0 ) che soddisfa la si ha si dice inoltre asintoticamente stabile se è semplicemente stabile e altrimenti, si dice instabile

17 Stabilità: interpretazione geometrica 2ε 2δ x 2 Movimento stabile movimento nominale t movimento perturbato x 1 Stabilità: interpretazione geometrica 2ε 2δ x 2 Movimento asintoticamente stabile movimento nominale t movimento perturbato x 1

18 Stabilità: interpretazione geometrica 2ε x 2 Movimento instabile 2δ movimento perturbato movimento nominale t Stabilità e sistemi lineari stazionari (LTI) Per i sistemi LTI si può parlare di stabilità del sistema e non dei singoli punti di equilibrio o movimenti Se A è invertibile, il punto di equilibrio è unico L unico movimento di interesse per la stabilità è il movimento libero, le cui caratteristiche dipendono solo dagli autovalori di A (e che NON dipendono dalla rappresentazione)

19 Stabilità e sistemi lineari stazionari (LTI) [TEOR.] Un sistema LTI tempo-continuo è asintoticamente stabile se e solo se tutti i suoi autovalori hanno parte reale negativa [TEOR.] Un sistema LTI tempo-discreto è asintoticamente stabile se e solo se tutti i suoi autovalori hanno modulo minore di 1 Raggiungibilità e Controllabilità Obiettivo dell analisi: comprendere le possibilità di intervento su un sistema tramite l azione di controllo (dualmente: stima tramite osservazioni) Tali proprietà del sistema sono strutturali: NON dipendono dalla rappresentazione NON sono modificabili tramite il controllo Raggiungibilità / Controllabilità: Applicazione diretta: pianificazione dell azione di controllo in catena aperta Conseguenze: proprietà in catena chiusa

20 Raggiungibilità (da x(t 0 )=x 0 a?) [Def.1]: Lo stato x 1 di un sistema dinamico è raggiungibile da x 0 nell intervallo di tempo [t 0,t 1 ] (con t 0 <t 1 ) se esiste una funzione di ingresso ammissibile u(.) tale che: L insieme degli stati raggiungibili all istante t 1 a partire dall evento (t 0,x 0 ) è indicato con R + (t 0,t 1,x 0 ) Controllabilità (da?? a x(t 1 )=x 1 ) [Def.2]: Lo stato x 0 di un sistema dinamico è controllabile a x 1 nell intervallo di tempo [t 0,t 1 ] (con t 0 <t 1 ) se esiste una funzione di ingresso ammissibile u(.) tale che: L insieme degli stati controllabili all evento (t 1,x 1 ) a partire dall istante t 1 è indicato con R - (t 0,t 1,x 1 )
=x 1 ) [Def.")
21 Raggiungibilità e Controllabilità Concetti complementari: NOTA: per i sistemi lineari tempo-invarianti (LTI), tali proprietà non dipendono da t 0 e t 1 ma solo da t=t 1 -t 0 e si può considerare x = 0 come unico punto di interesse Raggiungibilità e Controllabilità complete Il sistema MIMO LTI t.continuo [t.discreto] È completamente raggiungibile se qualunque stato può essere raggiunto da x=0 in un tempo finito È completamente controllabile se x=0 può essere raggiunto da qualunque stato in t finito
22 Raggiungibilità e risposta forzata La possibilità di considerare x=0 come unico punto di interesse nei sistemi LTI lega la raggiungibilità unicamente alla risposta forzata: TEMPO CONTINUO TEMPO DISCRETO Esempi fisici 1) se 1/(R 1 *C 1 = 1/(R 2 *C 2 ) 2) ancora un parallelo
23 Esempi fisici 1) fissando ω = 1/(R 1 *C 1 = 1/(R 2 *C 2 ) e partendo dall origine per cui è impossibile portare l origine verso qualunque condizione in cui x 1 (t) x 2 (t) 2) considerazioni analoghe Raggiungibilità dei sistemi LTI t.discretit Insieme di stati raggiungibili in k passi per: Perciò: = sottospazio stati raggiungibili in k passi
24 Esempi 3) 4) Idem, ma con Sottospazio raggiungibile I sottospazi raggiungibili in 1,2,n passi soddisfano: Per un numero di passi k n, applicando il Teorema di Cayley-Hamilton: e si definisce il sottospazio raggiungibile
25 Teorema di Cayley-Hamilton Data la matrice A nxn e il polinomio caratteristico: la matrice A è tale che Come conseguenza: Matrice di raggiungibilità Poiché il sottospazio raggiungibile è: si definisce matrice di raggiungibilità: Il sistema è completamente raggiungibile se e solo se:
26 Raggiungibilità come proprietà strutturale Come detto, sistemi equivalenti, per i quali cioè: hanno le stesse proprietà di raggiungibilità: per cui tali sottospazi hanno la stessa dimensione Controllabilità dei sistemi LTI t.discretit Si consideri ancora con l obiettivo di controllare (a 0) un certo x(0) 0, in k passi: x(0) 0 è controllabile in k passi se è raggiungibile in k passi
27 Sottospazio controllabile Il sottospazio controllabile in k passi è pertanto: Il sistema è controllabile in k passi se vale la relazione di inclusione precedente per l intero spazio degli stati, cioè: Il sistema è completamente controllabile se l intero spazio degli stati è controllabile in k passi per qualche k Controllabilità in n passi In realtà, il sistema è controllabile se e solo se è controllabile in n passi: Se il sistema è controllabile in k passi con k può infatti scegliere u(k)=u(k+1)=..=u(n-1)=0 Se invece k > n, si ha sempre che n, si
28 Controllabilità contro raggiungibilità Per sistemi LTI t.discreti fin qui trattati, le due proprietà NON sono equivalenti: raggiungibilità controllabilità (se ovviamente ) controllabilità raggiungibilità Es. se A = 0 e rank(b)<n, si ha controllabilità ( ) ma non raggiungibilità: Sono equivalenti se e solo se A è non singolare Raggiungibilità dei sistemi LTI t.continuit Per uno stato x(t) è raggiungibile al tempo t se esiste una funzione di ingresso ammissibile u(.) tale che: Definendo l operatore lineare x(t) è raggiungibile al tempo t se e solo se pertanto il sottospazio raggiungibile al tempo t:
29 Sottospazio raggiungibile e dipendenza da t Se gli elementi del vettore di ingresso possono assumere valori arbitrariamente grandi, il sottospazio raggiungibile non dipende da t Ciò è conseguenza del teorema che afferma: Il sottospazio raggiungibile al tempo t>0 è l immagine della matrice di raggiungibilità: Il sistema è quindi completamente raggiungibile se Controllabilità dei sistemi LTI t.continuit Per uno stato x(0) è controllabile (a 0) al tempo t se esiste una funzione di ingresso ammissibile u(.) tale che: ovvero perciò l insieme degli stati controllabili al tempo t è un sottospazio tale che:
30 Controllabilità contro raggiungibilità La relazione di inclusione precedente è valida anche in senso inverso, inoltre per l invertibilità dell esponenziale di matrice: il che significa anche che il sottospazio controllabile non dipende da t! Pertanto, nei sistemi LTI t.continui, a differenza di quelli t.discreti: raggiungibilità controllabilità Forma canonica di raggiungibilità: scomposizione Se il sistema non è completamente raggiungibile, è sempre possibile (e comodo per alcune analisi) trasformare il sistema in u Parte raggiungibile Parte non raggiungibile
31 Considerazioni applicative Le proprietà analizzate permettono di progettare leggi di controllo in catena aperta, ma a minima energia (es. per sistemi t.discreto, basate sulla (pseudo)inversa della matrice P + ) Nel progetto di controllo in catena chiusa (es. retroazione dello stato), occorre considerare che il controllore non è in grado di agire sulla parte non raggiungibile del sistema (qualora sia presente). Se la parte non raggiungibile è stabile, allora il sistema è (almeno..) stabilizzabile Controllo in retroazione e stabilizzabilità Infatti, dato un sistema LTI completamente raggiungibile e ipotizzando che x sia completamente misurabile, la legge di controllo con retroazione dello stato v(t) + u(t) x(t) S + K con dim(k) = m x n, permette di modificare arbitrariamente gli autovalori del sistema
32 Controllo in retroazione e stabilizzabilità Il sistema in catena chiusa diventa infatti i cui autovalori sono ovviamente quelli di A+BK ATTENZIONE: se il sistema NON è completamente raggiungibile, è possibile modificare SOLO gli autovalori della parte raggiungibile Se gli autovalori della parte NON raggiungibile sono a parte reale negativa, il sistema (come detto) viene definito stabilizzabile Osservabilità (x(t 0 )=x 0 e u(.)/y(.)) [Def.3]: Lo stato x 0 di un sistema dinamico è compatibile con le funzioni di ingresso u(.) e uscita y(.) nell intervallo di tempo [t 0,t 1 ] (t 0 <t 1 ) se: L insieme degli stati iniziali compatibili con u(.) e y(.) nell intervallo [t 0,t 1 ] è indicato con E - (t 0,t 1,u(.),y(.))
33 Ricostruibilità (x(t 1 )=x 1 e u(.)/y(.)) [Def.4]: Lo stato x 1 di un sistema dinamico è compatibile con le funzioni di ingresso u(.) e uscita y(.) nell intervallo di tempo [t 0,t 1 ] (t 0 <t 1 ) se: L insieme degli stati finali compatibili con u(.) e y(.) nell intervallo [t 0,t 1 ] è indicato con E + (t 0,t 1,u(.),y(.)) Indistinguibilità tra due stati x e x [Def.5]: Due stati x e x sono indistinguibili nel futuro nell intervallo di tempo [t 0,t 1 ] (t 0 <t 1 ) se per tutte le funzioni di ingresso u(.) : Un sistema è completamente osservabile in [t 0,t 1 ] se l insieme degli stati iniziali compatibili con u(.) e y(.) comprende un solo elemento per ogni u(.) e per ogni y(.) (t 0,u(.))
34 Osservabilità (indistinguibilità)) e risposta libera Nei sistemi LTI, è possibile: considerare solo sistemi puramente dinamici considerare solo t=t 1 -t 0 considerare solamente la risposta libera per valutare l indistinguibilità, poiché: Sistemi non osservabili Es.3 (ancora un parallelo..) x 1 y L 1 L 2 u x 2 C x 3 Qualunque stato iniziale con x 1 +x 2 =0 è indistinguibile dall origine dello spazio degli stati
35 Indistinguibilità nei sistemi LTI t.discretit Due stati x e x sono indistinguibili nel futuro in k passi se per ogni successione di ingresso: le successioni di uscita y e y, corrispondenti agli stati iniziali x e x, coincidono per i primi k passi, vale a dire: condizione che si può scrivere anche come: Indistinguibilità nei sistemi LTI t.discretit - 1 Due stati x e x sono indistinguibili nel futuro se lo sono in k passi per ogni k Per il teorema di Cayley-Hamilton: per k n-1, pertanto l indistinguibilità nel futuro fra due stati x e x è collegata unicamente alla matrice
36 Sottospazio non osservabile Se consideriamo l indistinguibilità da 0 (in k passi o per estensione analoga alla precedente, per qualunque k), si definisce la condizione di non osservabilità di uno stato x come: La matrice: è detta matrice di osservabilità e sottospazio non osservabile del sistema Osservabilità Se il sottospazio non osservabile contiene solo 0: allora il sistema si dice osservabile Ciò naturalmente equivale anche a testare: Vedi considerazioni sul sottospazio di non raggiungibilità
37 Indistinguibilità nei sistemi LTI t.continuit Analogamente al caso t.discreto, due stati x e x sono indistinguibili nel futuro nell intervallo [0,t] se (e solo se): Definendo l operatore lineare: allora uno stato x è indistinguibile da 0 (non osservabile) se: Test di osservabilità per sistemi LTI t.continuit Si può dimostrare che anche per un sistema LTI t.continuo: Il sottospazio non osservabile in [0,t] è (per ogni t>0) il nucleo della matrice di osservabilità: e il sistema è osservabile se:
38 Forma canonica di osservabilità: : scomposizione Se il sistema non è completamente osservabile, è sempre possibile (e comodo per alcune analisi) trasformare il sistema in u Parte osservabile Funzione di uscita y Parte non osservabile Scomposizione canonica Unendo le due trasformazioni viste
39 Dualità I risultati ottenuti dalle analisi di raggiungibilità e osservabilità mostrano notevoli analogie. Per formalizzare tali analogie, si usa ricorrere alla definizione di dualità (qui nel caso LTI t. continuo) Dato: si definisce sistema duale: Dualità - 1 Il numero di ingressi (uscite) di S corrisponde al numero di uscite (ingressi) di S D Le matrici di raggiungibiltà e osservabilità di S D (P D+ e O D- ) sono legate a quelle di S (P + e O - ) come segue:
40 Considerazioni applicative Il progetto di stimatori asintotici dello stato in catena chiusa: Sistema u x y L + - B + - w C Stimatore asintotico in catena chiusa può, grazie alla proprietà di dualità, essere effettuato sfruttando i metodi di allocazione degli autovalori per il progetto di controllori con retroazione dello stato. Dinamica dell osservatore asintotico Infatti, le equazioni dell osservatore dello stato in catena chiusa sono: Definendo la dinamica dell errore è i cui autovalori sono quelli di A+LC. Se la coppia (A,C) è osservabile, per dualità la coppia (A T,C T ) è raggiungibile e gli autovalori dell osservatore possono essere assegnati in modo arbitrario.
41 Progetto osservatore e rilevabilità Analogamente al caso del progetto di controllo, gli autovalori dell osservatore possono essere assegnati arbitrariamente SOLO se il sistema è completamente osservabile Se non lo è, è ancora possibile costruire un osservatore asintotico purchè gli autovalori della parte non osservabile siano a parte reale negativa Il sistema in tal caso viene detto rilevabile Controllo con retroazione dello stato stimato In generale, le variabili di stato non sono TUTTE misurabili direttamente, ma se il sistema è osservabile si può sfruttare il progetto di un osservatore ANCHE realizzare il controllo con retroazione completa dello stato (stimato) La dinamica del sistema complessivo diventa: o in forma compatta:
42 Principio di separazione Esprimendo la dinamica in termini di x(t), stato reale, ed e(t), errore di stima: i cui autovalori sono costituiti dall unione di quelli di A+KC con quelli di A+LC. Questi autovalori sono assegnabili arbitrariamente e separatamente per la parte di controllo e di osservazione
TECNICHE DI CONTROLLO
 TECNICHE DI CONTROLLO Richiami di Teoria dei Sistemi Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Sistemi e Modelli Concetto di Sistema Sistema: insieme, artificialmente isolato
TECNICHE DI CONTROLLO Richiami di Teoria dei Sistemi Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Sistemi e Modelli Concetto di Sistema Sistema: insieme, artificialmente isolato
Fondamenti di Automatica
 Fondamenti di Automatica Proprietà strutturali dei sistemi LTI Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Proprietà
Fondamenti di Automatica Proprietà strutturali dei sistemi LTI Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Proprietà
Fondamenti di Automatica
 Fondamenti di Automatica Controllo con retroazione dello stato Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. 39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Controllo
Fondamenti di Automatica Controllo con retroazione dello stato Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. 39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Controllo
Controllo con retroazione dello stato
 CONTROLLI AUTOMATICI LS Ingegneria Informatica Controllo con retroazione dello stato Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 51 29334 e-mail: claudio.melchiorri@unibo.it http://www-lar.deis.unibo.it/people/cmelchiorri
CONTROLLI AUTOMATICI LS Ingegneria Informatica Controllo con retroazione dello stato Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 51 29334 e-mail: claudio.melchiorri@unibo.it http://www-lar.deis.unibo.it/people/cmelchiorri
Esame scritto di Teoria dei Sistemi - Modena - 22 Giugno Domande
 Esame scritto di Teoria dei Sistemi - Modena - Giugno 5 - Domande Per ciascuno dei seguenti test a risposta multipla segnare con una crocetta le affermazioni che si ritengono giuste. Alcuni test sono seguiti
Esame scritto di Teoria dei Sistemi - Modena - Giugno 5 - Domande Per ciascuno dei seguenti test a risposta multipla segnare con una crocetta le affermazioni che si ritengono giuste. Alcuni test sono seguiti
TEORIA DEI SISTEMI SISTEMI LINEARI
 TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI SISTEMI LINEARI Ing. Cristian Secchi Tel.
TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI SISTEMI LINEARI Ing. Cristian Secchi Tel.
Fondamenti di Automatica
 Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
SOLUZIONE della Prova TIPO E per:
 SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
Prova TIPO D per: ESERCIZIO 1.
 Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
TEORIA DEI SISTEMI ANALISI DEI SISTEMI LTI
 TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI ANALISI DEI SISTEMI LTI Ing. Cristian
TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI ANALISI DEI SISTEMI LTI Ing. Cristian
Fondamenti di Automatica
 Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Osservabilità e ricostruibilità
 Capitolo. TEORIA DEI SISTEMI 5. Osservabilità e ricostruibilità Osservabilità: il problema dell osservabilità consiste nel determinare lo stato iniziale x(t ) mediante osservazioni degli ingressi u(t)
Capitolo. TEORIA DEI SISTEMI 5. Osservabilità e ricostruibilità Osservabilità: il problema dell osservabilità consiste nel determinare lo stato iniziale x(t ) mediante osservazioni degli ingressi u(t)
Controlli Automatici e Teoria dei Sistemi I modelli dei sistemi
 Controlli Automatici e Teoria dei Sistemi I modelli dei sistemi Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica Università di Bologna Viale del Risorgimento 2, 40136 Bologna
Controlli Automatici e Teoria dei Sistemi I modelli dei sistemi Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica Università di Bologna Viale del Risorgimento 2, 40136 Bologna
Spazio degli stati. G(s) = Y (s) X(s) = b m s m + b m 1 s m b 1 s + b 0
 = Y (s) X(s) = b m s m + b m 1 s m b 1 s + b 0") .. MODELLISTICA - Modellistica dinamica 2. Spazio degli stati I sistemi dinamici lineari vengono tipicamente descritti utilizzando la trasformata di Laplace e il concetto di funzione di trasferimento.
.. MODELLISTICA - Modellistica dinamica 2. Spazio degli stati I sistemi dinamici lineari vengono tipicamente descritti utilizzando la trasformata di Laplace e il concetto di funzione di trasferimento.
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 9 giugno 2017 SOLUZIONE ESERCIZIO 1. Si consideri un altoparlante ad attrazione magnetica per la riproduzione sonora, rappresentato dalla seguente
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 9 giugno 2017 SOLUZIONE ESERCIZIO 1. Si consideri un altoparlante ad attrazione magnetica per la riproduzione sonora, rappresentato dalla seguente
Proprietà strutturali: Controllabilità e Osservabilità
 CONTROLLI AUTOMATICI LS Ingegneria Informatica Proprietà strutturali: Controllabilità e Osservabilità Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: claudio.melchiorri@deis.unibo.it
CONTROLLI AUTOMATICI LS Ingegneria Informatica Proprietà strutturali: Controllabilità e Osservabilità Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: claudio.melchiorri@deis.unibo.it
CONTROLLO DI SISTEMI ROBOTICI Laurea Specialistica in Ingegneria Meccatronica
 CONTROLLO DI SISTEMI ROBOTICI Laurea Specialistica in Ingegneria Meccatronica CONTROLLO DI SISTEMI ROBOTICI ANALISI DEI SISTEMI LTI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi
CONTROLLO DI SISTEMI ROBOTICI Laurea Specialistica in Ingegneria Meccatronica CONTROLLO DI SISTEMI ROBOTICI ANALISI DEI SISTEMI LTI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) (A.A. fino al 2017/2018) SOLUZIONE
 (A.A. fino al 2017/2018) SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) (A.A. fino al 2017/2018) Prova scritta 7 giugno 2019 SOLUZIONE ESERCIZIO 1. Si consideri il problema della regolazione di quota dell aerostato ad aria calda mostrato
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) (A.A. fino al 2017/2018) Prova scritta 7 giugno 2019 SOLUZIONE ESERCIZIO 1. Si consideri il problema della regolazione di quota dell aerostato ad aria calda mostrato
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il circuito elettronico
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il circuito elettronico
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione sicura tra umani
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione sicura tra umani
Stimatori dello stato
 Capitolo. TEORIA DEI SISTEMI 5. Stimatori dello stato La retroazione statica dello stato u(k) = K x(k) richiede la conoscenza di tutte le componenti del vettore di stato. Tipicamente le uniche variabili
Capitolo. TEORIA DEI SISTEMI 5. Stimatori dello stato La retroazione statica dello stato u(k) = K x(k) richiede la conoscenza di tutte le componenti del vettore di stato. Tipicamente le uniche variabili
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
SOLUZIONE della Prova TIPO B per:
 SOLUZIONE della Prova TIPO B per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla
SOLUZIONE della Prova TIPO B per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla
Controlli Automatici I
 Ingegneria Elettrica Politecnico di Torino Luca Carlone Controlli Automatici I LEZIONE V Sommario LEZIONE V Proprietà strutturali Controllabilità e raggiungibilità Raggiungibilità nei sistemi lineari Forma
Ingegneria Elettrica Politecnico di Torino Luca Carlone Controlli Automatici I LEZIONE V Sommario LEZIONE V Proprietà strutturali Controllabilità e raggiungibilità Raggiungibilità nei sistemi lineari Forma
Nome, Cognome: punti corrispondono alla nota massima.
 Nome Cognome: Gli esercizi 11 e 12 sono obbligatori il terzo esercizio deve essere scelto tra 13 e 14 10 punti corrispondono alla nota massima 12 novembre 2016 ing Ivan Furlan 1 11 Sistema di controllo
Nome Cognome: Gli esercizi 11 e 12 sono obbligatori il terzo esercizio deve essere scelto tra 13 e 14 10 punti corrispondono alla nota massima 12 novembre 2016 ing Ivan Furlan 1 11 Sistema di controllo
Analisi nel dominio del tempo delle rappresentazioni in variabili di stato
 4 Analisi nel dominio del tempo delle rappresentazioni in variabili di stato Versione del 21 marzo 2019 In questo capitolo 1 si affronta lo studio, nel dominio del tempo, dei modelli di sistemi lineari,
4 Analisi nel dominio del tempo delle rappresentazioni in variabili di stato Versione del 21 marzo 2019 In questo capitolo 1 si affronta lo studio, nel dominio del tempo, dei modelli di sistemi lineari,
4 Analisi nel dominio del tempo delle rappresentazioni in
 Indice del libro Alessandro Giua, Carla Seatzu Analisi dei sistemi dinamici, Springer-Verlag Italia, II edizione, 2009 Pagina web: http://www.diee.unica.it/giua/asd/ Prefazione.....................................................
Indice del libro Alessandro Giua, Carla Seatzu Analisi dei sistemi dinamici, Springer-Verlag Italia, II edizione, 2009 Pagina web: http://www.diee.unica.it/giua/asd/ Prefazione.....................................................
Ingegneria Informatica. Prof. Claudio Melchiorri DEIS-Università di Bologna Tel
 CONTROLLI AUTOMATICI LS Ingegneria Informatica Sistemi a Dati Campionati Prof. DEIS-Università di Bologna Tel. 51 29334 e-mail: claudio.melchiorri@unibo.it http://www-lar lar.deis.unibo.it/people/cmelchiorri
CONTROLLI AUTOMATICI LS Ingegneria Informatica Sistemi a Dati Campionati Prof. DEIS-Università di Bologna Tel. 51 29334 e-mail: claudio.melchiorri@unibo.it http://www-lar lar.deis.unibo.it/people/cmelchiorri
SOLUZIONE della Prova TIPO F per:
 SOLUZIONE della Prova TIPO F per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
SOLUZIONE della Prova TIPO F per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
CONTROLLI AUTOMATICI LS Ingegneria Informatica SISTEMI E MODELLI
 CONTROLLI AUTOMATICI LS Ingegneria Informatica SISTEMI E MODELLI Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: claudio.melchiorri@unibo.it http://www-lar.deis.unibo.it/~cmelchiorri
CONTROLLI AUTOMATICI LS Ingegneria Informatica SISTEMI E MODELLI Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: claudio.melchiorri@unibo.it http://www-lar.deis.unibo.it/~cmelchiorri
Proprietà Strutturali dei Sistemi Dinamici: Controllabilità e Raggiungibilità
 Proprietà Strutturali dei Sistemi Dinamici: ontrollabilità e Raggiungibilità Ingegneria dell'automazione orso di Sistemi di ontrollo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 22 ontrollabilità
Proprietà Strutturali dei Sistemi Dinamici: ontrollabilità e Raggiungibilità Ingegneria dell'automazione orso di Sistemi di ontrollo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 22 ontrollabilità
Elementi di Teoria dei Sistemi
 Parte 2, 1 Elementi di Teoria dei Sistemi Parte 2, 2 Definizione di sistema dinamico Parte 2, 3 Sistema dinamico a tempo continuo Ingresso Uscita Parte 2, 4 Cosa significa Dinamico?? e` univocamente determinata?
Parte 2, 1 Elementi di Teoria dei Sistemi Parte 2, 2 Definizione di sistema dinamico Parte 2, 3 Sistema dinamico a tempo continuo Ingresso Uscita Parte 2, 4 Cosa significa Dinamico?? e` univocamente determinata?
Elementi di Teoria dei Sistemi. Definizione di sistema dinamico. Cosa significa Dinamico? Sistema dinamico a tempo continuo
 Parte 2, 1 Parte 2, 2 Elementi di Teoria dei Sistemi Definizione di sistema dinamico Parte 2, 3 Sistema dinamico a tempo continuo Cosa significa Dinamico? Parte 2, 4? e` univocamente determinata? Ingresso
Parte 2, 1 Parte 2, 2 Elementi di Teoria dei Sistemi Definizione di sistema dinamico Parte 2, 3 Sistema dinamico a tempo continuo Cosa significa Dinamico? Parte 2, 4? e` univocamente determinata? Ingresso
Stimatori dello stato
 Capitolo 5. OSSERVABILITÀ E RICOSTRUIBILITÀ 5. Stimatori dello stato La retroazione statica dello stato u(k) = K x(k) richiede la conoscenza di tutte le componenti del vettore di stato. Tipicamente le
Capitolo 5. OSSERVABILITÀ E RICOSTRUIBILITÀ 5. Stimatori dello stato La retroazione statica dello stato u(k) = K x(k) richiede la conoscenza di tutte le componenti del vettore di stato. Tipicamente le
Modelli nello spazio degli stati
 Modelli nello spazio degli stati Modelli nello spazio degli stati Stato: informazione che riassume, in ogni istante, l effetto della storia passata del sistema sul suo comportamento futuro. x(t) stato
Modelli nello spazio degli stati Modelli nello spazio degli stati Stato: informazione che riassume, in ogni istante, l effetto della storia passata del sistema sul suo comportamento futuro. x(t) stato
Parte 3, 1. Stabilità. Prof. Thomas Parisini. Fondamenti di Automatica
 Parte 3, 1 Stabilità Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
Parte 3, 1 Stabilità Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
Stabilità: Stabilità. Stabilità: il caso dei sistemi dinamici a tempo continuo. Stabilità dell equilibrio
 Parte 3, 1 Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) Stabilità - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
Parte 3, 1 Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) Stabilità - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
01AYS / 07AYS - FONDAMENTI DI AUTOMATICA Tipologia degli esercizi proposti nel compito del 16/XI/2007
 1 01AYS / 07AYS - FONDAMENTI DI AUTOMATICA Tipologia degli esercizi proposti nel compito del 16/XI/2007 Esercizio 1 - Date le matrici A = 2p 1 1 2p 2 C = 1 p di un modello LTI in variabili di stato a tempo
1 01AYS / 07AYS - FONDAMENTI DI AUTOMATICA Tipologia degli esercizi proposti nel compito del 16/XI/2007 Esercizio 1 - Date le matrici A = 2p 1 1 2p 2 C = 1 p di un modello LTI in variabili di stato a tempo
Controlli Automatici LA Introduzione all'analisi dei sistemi dinamici
 Introduzione all'analisi dei sistemi dinamici lineari Prof. Carlo Rossi DEIS-Università di Bologna Tel. 5 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi. 2. movimento e stabilità del
Introduzione all'analisi dei sistemi dinamici lineari Prof. Carlo Rossi DEIS-Università di Bologna Tel. 5 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi. 2. movimento e stabilità del
SOLUZIONE della Prova TIPO A per:
 SOLUZIONE della Prova TIPO A per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
SOLUZIONE della Prova TIPO A per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
Raggiungibilità e controllabilità
 Capitolo. TEORIA DEI SISTEMI 4. Raggiungibilità e controllabilità Raggiungibilità. Il problema della raggiungibilità consiste nel determinare l insieme di stati raggiungibili a partire da un dato stato
Capitolo. TEORIA DEI SISTEMI 4. Raggiungibilità e controllabilità Raggiungibilità. Il problema della raggiungibilità consiste nel determinare l insieme di stati raggiungibili a partire da un dato stato
Elementi di Teoria dei Sistemi
 Parte 2, 1 Elementi di Teoria dei Sistemi Parte 2, 2 Sistema dinamico a tempo continuo Ingresso Uscita Parte 2, 3 Cosa significa Dinamico?? e` univocamente determinata? Se la risposta e` no Sistema dinamico
Parte 2, 1 Elementi di Teoria dei Sistemi Parte 2, 2 Sistema dinamico a tempo continuo Ingresso Uscita Parte 2, 3 Cosa significa Dinamico?? e` univocamente determinata? Se la risposta e` no Sistema dinamico
SOLUZIONE della Prova TIPO E per:
 SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 CFU): 6 degli 8 esercizi numerici + 4 delle 5 domande a risposta multipla (v. ultime due pagine) NOTA: nell effettiva prova d esame
SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 CFU): 6 degli 8 esercizi numerici + 4 delle 5 domande a risposta multipla (v. ultime due pagine) NOTA: nell effettiva prova d esame
Elementi di Teoria dei Sistemi. Definizione di sistema dinamico. Cosa significa Dinamico? Sistema dinamico a tempo continuo
 Parte 2, 1 Parte 2, 2 Elementi di Teoria dei Sistemi Definizione di sistema dinamico Parte 2, 3 Sistema dinamico a tempo continuo Cosa significa Dinamico? Parte 2, 4? e` univocamente determinata? Ingresso
Parte 2, 1 Parte 2, 2 Elementi di Teoria dei Sistemi Definizione di sistema dinamico Parte 2, 3 Sistema dinamico a tempo continuo Cosa significa Dinamico? Parte 2, 4? e` univocamente determinata? Ingresso
SISTEMI LINEARI E STAZIONARI A TEMPO CONTINUO
 SISTEMI LINEARI E STAZIONARI A TEMPO CONTINUO Movimento ed equilibrio Stabilità Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori MOVIMENTO ED EQUILIBRIO Sistema lineare e stazionario
SISTEMI LINEARI E STAZIONARI A TEMPO CONTINUO Movimento ed equilibrio Stabilità Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori MOVIMENTO ED EQUILIBRIO Sistema lineare e stazionario
ẋ 1 = 2x 1 + (sen 2 (x 1 ) + 1)x 2 + 2u (1) y = x 1
 + 1)x 2 + 2u (1) y = x 1") Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
COMPITO DI ANALISI DEI SISTEMI Laurea in Ingegneria dell Informazione 13 Luglio 2010
 COMPITO DI ANALISI DEI SISTEMI Laurea in Ingegneria dell Informazione 3 Luglio Esercizio. Si consideri il seguente sistema a tempo continuo: ẋ(t) = F x(t) = x(t), y(t) = Hx(t) = [ ] x(t), t. i) Si progetti,
COMPITO DI ANALISI DEI SISTEMI Laurea in Ingegneria dell Informazione 3 Luglio Esercizio. Si consideri il seguente sistema a tempo continuo: ẋ(t) = F x(t) = x(t), y(t) = Hx(t) = [ ] x(t), t. i) Si progetti,
Controllabilità e raggiungibilità
 TDSC Parte 4, 1 Controllabilità e raggiungibilità Definizioni e proprietà per i sistemi dinamici TDSC Parte 4, 2 Definizioni generali Che cosa si intende per controllabilità o per raggiungibilità?! Facendo
TDSC Parte 4, 1 Controllabilità e raggiungibilità Definizioni e proprietà per i sistemi dinamici TDSC Parte 4, 2 Definizioni generali Che cosa si intende per controllabilità o per raggiungibilità?! Facendo
Controlli Automatici LA Introduzione all'analisi dei sistemi dinamici lineari
 Controlli Automatici LA Introduzione all'analisi dei sistemi dinamici lineari Prof. Carlo Rossi DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi
Controlli Automatici LA Introduzione all'analisi dei sistemi dinamici lineari Prof. Carlo Rossi DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi
Scrivere il numero della risposta sopra alla corrispondente domanda. (voti: 2,0,-1, min=14 sulle prime 10) , C = [3 2 2], D =
![Scrivere il numero della risposta sopra alla corrispondente domanda. (voti: 2,0,-1, min=14 sulle prime 10) , C = [3 2 2], D =](/thumbs/67/56407198.jpg "Scrivere il numero della risposta sopra alla corrispondente domanda. (voti: 2,0,-1, min=14 sulle prime 10) , C = [3 2 2], D =") n. 101 cognome nome corso di laurea Analisi e Simulazione di Sistemi Dinamici 18/11/2003 Risposte Domande 1 2 3 4 5 6 7 8 9 10 N. matricola Scrivere il numero della risposta sopra alla corrispondente domanda.
n. 101 cognome nome corso di laurea Analisi e Simulazione di Sistemi Dinamici 18/11/2003 Risposte Domande 1 2 3 4 5 6 7 8 9 10 N. matricola Scrivere il numero della risposta sopra alla corrispondente domanda.
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il
Nome, Cognome: punti corrispondono alla nota massima.
 Nome ognome: Gli esercizi 11 e 12 sono obbligatori il terzo esercizio deve essere scelto tra 13 e 14 10 punti corrispondono alla nota massima 6 dicembre 2012 ing Ivan Furlan 1 11 Sistema per sollevare
Nome ognome: Gli esercizi 11 e 12 sono obbligatori il terzo esercizio deve essere scelto tra 13 e 14 10 punti corrispondono alla nota massima 6 dicembre 2012 ing Ivan Furlan 1 11 Sistema per sollevare
Proprietà strutturali e leggi di controllo
 Proprietà strutturali e leggi di controllo Retroazione statica dallo stato La legge di controllo Esempi di calcolo di leggi di controllo Il problema della regolazione 2 Retroazione statica dallo stato
Proprietà strutturali e leggi di controllo Retroazione statica dallo stato La legge di controllo Esempi di calcolo di leggi di controllo Il problema della regolazione 2 Retroazione statica dallo stato
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 20 giugno 2017 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema di sorveglianza costituito da una flotta di droni di tipologia quadricottero.
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 20 giugno 2017 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema di sorveglianza costituito da una flotta di droni di tipologia quadricottero.
CONTROLLI AUTOMATICI Ingegneria Gestionale ANALISI ARMONICA
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
MOVIMENTO DEI SISTEMI LINEARI
 MOVIMENTO DEI SISTEMI LINEARI I sistemi continui x& = Ax + Bu Formula di Lagrange 3 3 e At = I + At + A t + A t! 3! Nei sistemi lineari, quindi x( t) = x ( t) + x ( t) l Inoltre x l (t) e x f (t) sono
MOVIMENTO DEI SISTEMI LINEARI I sistemi continui x& = Ax + Bu Formula di Lagrange 3 3 e At = I + At + A t + A t! 3! Nei sistemi lineari, quindi x( t) = x ( t) + x ( t) l Inoltre x l (t) e x f (t) sono
Fondamenti di Automatica
 Fondamenti di Automatica Proprietà strutturali e leggi di controllo aggiungibilità e controllabilità etroazione statica dallo stato Osservabilità e rilevabilità Stima dello stato e regolatore dinamico
Fondamenti di Automatica Proprietà strutturali e leggi di controllo aggiungibilità e controllabilità etroazione statica dallo stato Osservabilità e rilevabilità Stima dello stato e regolatore dinamico
Proprietà strutturali e leggi di controllo
 Proprietà strutturali e leggi di controllo sservabilità e rilevabilità Definizioni ed esempi introduttivi Analisi dell osservabilità di sistemi dinamici LTI Esempi di studio dell osservabilità sservabilità
Proprietà strutturali e leggi di controllo sservabilità e rilevabilità Definizioni ed esempi introduttivi Analisi dell osservabilità di sistemi dinamici LTI Esempi di studio dell osservabilità sservabilità
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff e le formule di base
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff e le formule di base
Stabilità per i sistemi dinamici a tempo discreto
 Parte 3, 1 Stabilità per i sistemi dinamici a tempo discreto Parte 3, 2 Stabilità: Le definizioni delle proprietà di stabilità per i sistemi dinamici a tempo discreto sono analoghe a quelle viste per i
Parte 3, 1 Stabilità per i sistemi dinamici a tempo discreto Parte 3, 2 Stabilità: Le definizioni delle proprietà di stabilità per i sistemi dinamici a tempo discreto sono analoghe a quelle viste per i
Fondamenti di Automatica
 Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
CONTROLLO DI ROBOT INDUSTRIALI Laurea Magistrale in Ingegneria Meccatronica
 CONTROLLO DI ROBOT INDUSTRIALI Laurea Magistrale in Ingegneria Meccatronica CONTROLLO DI ROBOT INDUSTRIALI ANALISI DEI SISTEMI LTI Ing. Tel. 5 535 e-mail: cristian.secchi@unimore.it http://www.dismi.unimo.it/members/csecchi
CONTROLLO DI ROBOT INDUSTRIALI Laurea Magistrale in Ingegneria Meccatronica CONTROLLO DI ROBOT INDUSTRIALI ANALISI DEI SISTEMI LTI Ing. Tel. 5 535 e-mail: cristian.secchi@unimore.it http://www.dismi.unimo.it/members/csecchi
Stabilità dei sistemi dinamici
 Stabilità - 1 Corso di Laurea in Ingegneria Meccanica Stabilità dei sistemi dinamici DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Stabilità
Stabilità - 1 Corso di Laurea in Ingegneria Meccanica Stabilità dei sistemi dinamici DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Stabilità
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Proprietà strutturali e leggi di controllo. Stima dello stato e regolatore dinamico
 Proprietà strutturali e leggi di controllo Stima dello stato e regolatore dinamico Stima dello stato e regolatore dinamico Stimatore asintotico dello stato Esempi di progetto di stimatori asintotici dello
Proprietà strutturali e leggi di controllo Stima dello stato e regolatore dinamico Stima dello stato e regolatore dinamico Stimatore asintotico dello stato Esempi di progetto di stimatori asintotici dello
Cristian Secchi Pag. 1
 CONTROLLO DI SISTEMI ROBOTCI Laurea Specialistica in Ingegneria Meccatronica CONTROLLO DI SISTEMI ROBOTICI OSSERVABILITA E RICOSTRUIBILITA Ing. Tel. 0522 522234 e-mail: secchi.cristian@unimore.it http://www.dismi.unimore.it/members/csecchi
CONTROLLO DI SISTEMI ROBOTCI Laurea Specialistica in Ingegneria Meccatronica CONTROLLO DI SISTEMI ROBOTICI OSSERVABILITA E RICOSTRUIBILITA Ing. Tel. 0522 522234 e-mail: secchi.cristian@unimore.it http://www.dismi.unimore.it/members/csecchi
Prova TIPO C per: ESERCIZIO 1.
 Prova TIPO C per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta multipla (v. ultime
Prova TIPO C per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta multipla (v. ultime
Fondamenti di Automatica
 Fondamenti di Automatica Esempi applicativi Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Esempi applicativi TESTINA
Fondamenti di Automatica Esempi applicativi Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Esempi applicativi TESTINA
Controlli Automatici
 Controlli Automatici (Prof. Casella) I Prova in Itinere - 21 Novembre 2005 Soluzioni Esercizio 1 Con riferimento al seguente sistema dinamico: ẋ 1 = x 1 x 2 2x 3 ẋ 2 = 2x 2 x 3 ẋ 3 =x 2 2x 3 u y=x 2 x
Controlli Automatici (Prof. Casella) I Prova in Itinere - 21 Novembre 2005 Soluzioni Esercizio 1 Con riferimento al seguente sistema dinamico: ẋ 1 = x 1 x 2 2x 3 ẋ 2 = 2x 2 x 3 ẋ 3 =x 2 2x 3 u y=x 2 x
La funzione di risposta armonica
 Funzione di risposta armonica - Corso di Laurea in Ingegneria Meccanica Controlli Automatici L La funzione di risposta armonica DEIS-Università di Bologna Tel. 5 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi
Funzione di risposta armonica - Corso di Laurea in Ingegneria Meccanica Controlli Automatici L La funzione di risposta armonica DEIS-Università di Bologna Tel. 5 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff
SOLUZIONE della Prova TIPO D per:
 SOLUZIONE della Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla
SOLUZIONE della Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 28 giugno 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 28 giugno 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie
ANALISI ARMONICA. G(s) Analisi armonica. Funzione di risposta armonica
 Analisi armonica. Funzione di risposta armonica") CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Analisi
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Analisi
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Ing. Luigi
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Ing. Luigi
Definizione di Sistema Dinamico
 Capitolo 1. INTRODUZIONE 1.1 Definizione di Sistema Dinamico Un sistema dinamico è definito dai seguenti oggetti: Un insieme ordinato dei tempi T, Un insieme di valori di ingresso U, Un insieme di funzioni
Capitolo 1. INTRODUZIONE 1.1 Definizione di Sistema Dinamico Un sistema dinamico è definito dai seguenti oggetti: Un insieme ordinato dei tempi T, Un insieme di valori di ingresso U, Un insieme di funzioni
Lezione 2. Sistemi dinamici a tempo continuo. F. Previdi - Automatica - Lez. 2 1
 Lezione 2. Sistemi dinamici a tempo continuo F. Previdi - Automatica - Lez. 2 1 Schema della lezione 1. Cos è un sistema dinamico? 2. Modellistica dei sistemi dinamici 3. Il concetto di dinamica 4. Sistemi
Lezione 2. Sistemi dinamici a tempo continuo F. Previdi - Automatica - Lez. 2 1 Schema della lezione 1. Cos è un sistema dinamico? 2. Modellistica dei sistemi dinamici 3. Il concetto di dinamica 4. Sistemi
ANTITRAFORMATE DI LAPLACE MODI DI UN SISTEMA
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html ANTITRAFORMATE DI LAPLACE MODI DI UN SISTEMA Ing. e-mail: luigi.biagiotti@unimore.it
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html ANTITRAFORMATE DI LAPLACE MODI DI UN SISTEMA Ing. e-mail: luigi.biagiotti@unimore.it
Controlli Automatici e Teoria dei Sistemi I Sistemi Lineari Stazionari Retroazione, Modelli di Ingresso Uscita, Realizzazione
 Controlli Automatici e Teoria dei Sistemi I Sistemi Lineari Stazionari Retroazione, Modelli di Ingresso Uscita, Realizzazione Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica
Controlli Automatici e Teoria dei Sistemi I Sistemi Lineari Stazionari Retroazione, Modelli di Ingresso Uscita, Realizzazione Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica
Sistemi Dinamici a Tempo Continuo
 Parte 2 Aggiornamento: Febbraio 2012 Parte 2, 1 T Sistemi Dinamici a Tempo Continuo Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi
Parte 2 Aggiornamento: Febbraio 2012 Parte 2, 1 T Sistemi Dinamici a Tempo Continuo Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi
Fondamenti di Automatica
 Fondamenti di Automatica Introduzione e modellistica dei sistemi Introduzione allo studio dei sistemi Modellistica dei sistemi dinamici elettrici Modellistica dei sistemi dinamici meccanici Modellistica
Fondamenti di Automatica Introduzione e modellistica dei sistemi Introduzione allo studio dei sistemi Modellistica dei sistemi dinamici elettrici Modellistica dei sistemi dinamici meccanici Modellistica
Note per il corso di Geometria Corso di laurea in Ing. Edile/Architettura. 4 Sistemi lineari. Metodo di eliminazione di Gauss Jordan
 Note per il corso di Geometria 2006-07 Corso di laurea in Ing. Edile/Architettura Sistemi lineari. Metodo di eliminazione di Gauss Jordan.1 Operazioni elementari Abbiamo visto che un sistema di m equazioni
Note per il corso di Geometria 2006-07 Corso di laurea in Ing. Edile/Architettura Sistemi lineari. Metodo di eliminazione di Gauss Jordan.1 Operazioni elementari Abbiamo visto che un sistema di m equazioni
Esame di FONDAMENTI DI AUTOMATICA (6 crediti) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 crediti) / CONTROLLI AUTOMATICI Prova scritta 24 luglio 2019 SOLUZIONE ESERCIZIO 1. Si consideri un sistema per il riscaldamento di parti metalliche, costituito da
Esame di FONDAMENTI DI AUTOMATICA (6 crediti) / CONTROLLI AUTOMATICI Prova scritta 24 luglio 2019 SOLUZIONE ESERCIZIO 1. Si consideri un sistema per il riscaldamento di parti metalliche, costituito da
19 Marzo Equazioni differenziali.
 19 Marzo 2019 Equazioni differenziali. Definizione 1. Si chiama equazione differenziale una relazione che coinvolge una o più derivate di una funzione incognita y(x), la funzione stessa, funzioni di x
19 Marzo 2019 Equazioni differenziali. Definizione 1. Si chiama equazione differenziale una relazione che coinvolge una o più derivate di una funzione incognita y(x), la funzione stessa, funzioni di x
Controlli Automatici e Teoria dei Sistemi Stabilità dei Moti e delle Risposte nei Sistemi a Stato Vettore
 Controlli Automatici e Teoria dei Sistemi Stabilità dei Moti e delle Risposte nei Sistemi a Stato Vettore Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica Università di Bologna
Controlli Automatici e Teoria dei Sistemi Stabilità dei Moti e delle Risposte nei Sistemi a Stato Vettore Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica Università di Bologna
08. Analisi armonica. Controlli Automatici
 8. Analisi armonica Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Alessio Levratti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
8. Analisi armonica Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Alessio Levratti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
TEORIA DEI SISTEMI e IDENTIFICAZIONE DEI MODELLI (IMC - 12 CFU) COMPITO DI TEORIA DEI SISTEMI 30 Gennaio A.A
 COMPITO DI TEORIA DEI SISTEMI 30 Gennaio A.A") TEORIA DEI SISTEMI e IDENTIFICAZIONE DEI MODELLI (IMC - 12 CFU) COMPITO DI TEORIA DEI SISTEMI 30 Gennaio 2013 - A.A. 2012-2013 Esercizio 1. Si consideri il sistema a tempo continuo descritto dalle seguenti
TEORIA DEI SISTEMI e IDENTIFICAZIONE DEI MODELLI (IMC - 12 CFU) COMPITO DI TEORIA DEI SISTEMI 30 Gennaio 2013 - A.A. 2012-2013 Esercizio 1. Si consideri il sistema a tempo continuo descritto dalle seguenti
Lezione 6. Assegnamento degli autovalori mediante retroazione dello stato. F. Previdi - Controlli Automatici - Lez. 6 1
 Lezione 6. Assegnamento degli autovalori mediante retroazione dello stato F. Previdi - Controlli Automatici - Lez. 6 Schema della lezione. ntroduzione 2. Assegnamento degli autovalori con stato accessibile
Lezione 6. Assegnamento degli autovalori mediante retroazione dello stato F. Previdi - Controlli Automatici - Lez. 6 Schema della lezione. ntroduzione 2. Assegnamento degli autovalori con stato accessibile
iii) uno stimatore il cui errore di stima converga a zero più rapidamente della successione ;
 uno stimatore il cui errore di stima converga a zero più rapidamente della successione ;") Teoria dei Sistemi - 9 cfu - L.M. in Ingegneria dell Automazione Compito del 4//7 Esercizio Si consideri il sistema lineare discreto Σ = (F, G, H) con F = 3 4 5, G =, H = 4 6 6 Si stabilisca se esiste,
Teoria dei Sistemi - 9 cfu - L.M. in Ingegneria dell Automazione Compito del 4//7 Esercizio Si consideri il sistema lineare discreto Σ = (F, G, H) con F = 3 4 5, G =, H = 4 6 6 Si stabilisca se esiste,
SISTEMI DINAMICI A TEMPO CONTINUO. Classificazione dei sistemi dinamici
 SISTEMI DINAMICI A TEMPO CONTINUO Concetti fondamentali Classificazione dei sistemi dinamici Movimento ed equilibrio Sistemi lineari Linearizzazione Stabilità Illustrazioni dal Testo di Riferimento per
SISTEMI DINAMICI A TEMPO CONTINUO Concetti fondamentali Classificazione dei sistemi dinamici Movimento ed equilibrio Sistemi lineari Linearizzazione Stabilità Illustrazioni dal Testo di Riferimento per
w 1 (z) = z2 z + 1 z 3 z 2 + z 1, w 2(z) = z2
 = z2 z + 1 z 3 z 2 + z 1, w 2(z) = z2") Teoria dei Sistemi - 9 cfu - L.M. in Ingegneria dell Automazione Compito del 3///7 Esercizio Si considerino le funzioni di trasferimento (a tempo discreto) w (z) = z z + z 3 z + z, w (z) = z z 3 (.) (i)
Teoria dei Sistemi - 9 cfu - L.M. in Ingegneria dell Automazione Compito del 3///7 Esercizio Si considerino le funzioni di trasferimento (a tempo discreto) w (z) = z z + z 3 z + z, w (z) = z z 3 (.) (i)
Analisi dei Sistemi Esercitazione 1
 Analisi dei Sistemi Esercitazione Soluzione 0 Ottobre 00 Esercizio. Sono dati i seguenti modelli matematici di sistemi dinamici. ÿ(t) + y(t) = 5 u(t)u(t). () t ÿ(t) + tẏ(t) + y(t) = 5sin(t)ü(t). () ẋ (t)
Analisi dei Sistemi Esercitazione Soluzione 0 Ottobre 00 Esercizio. Sono dati i seguenti modelli matematici di sistemi dinamici. ÿ(t) + y(t) = 5 u(t)u(t). () t ÿ(t) + tẏ(t) + y(t) = 5sin(t)ü(t). () ẋ (t)
Proprietà Strutturali dei Sistemi Dinamici: Stabilità
 Proprietà Strutturali dei Sistemi Dinamici: Stabilità Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012 1 Stabilità Consideriamo il sistema
Proprietà Strutturali dei Sistemi Dinamici: Stabilità Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012 1 Stabilità Consideriamo il sistema
Soluzione nel dominio del tempo
 Soluzione nel dominio del tempo Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Antitrasformate CA 2017 2018 Prof. Laura Giarré 1 Risposta nel dominio trasformato Ricordo che
Soluzione nel dominio del tempo Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Antitrasformate CA 2017 2018 Prof. Laura Giarré 1 Risposta nel dominio trasformato Ricordo che
TEORIA DEI SISTEMI e IDENTIFICAZIONE DEI MODELLI (IMC - 12 CFU) COMPITO DI TEORIA DEI SISTEMI 20 Giugno A.A
 COMPITO DI TEORIA DEI SISTEMI 20 Giugno A.A") TEORIA DEI SISTEMI e IDENTIFICAZIONE DEI MODELLI (IMC - CFU) COMPITO DI TEORIA DEI SISTEMI Giugno - A.A. - Esercizio. Si consideri il sistema a tempo continuo descritto dalle seguenti equazioni: x(t +
TEORIA DEI SISTEMI e IDENTIFICAZIONE DEI MODELLI (IMC - CFU) COMPITO DI TEORIA DEI SISTEMI Giugno - A.A. - Esercizio. Si consideri il sistema a tempo continuo descritto dalle seguenti equazioni: x(t +
Proprietà Strutturali dei Sistemi Dinamici: Osservabilità
 Proprietà Strutturali dei Sistemi Dinamici: sservabilità Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 ttobre 2012 1 Consideriamo il sistema x f
Proprietà Strutturali dei Sistemi Dinamici: sservabilità Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 ttobre 2012 1 Consideriamo il sistema x f
TEORIA DEI SISTEMI OSSERVABILITA E RICOSTRUIBILITA
 TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI OSSERVABILITA E RICOSTRUIBILITA Ing. Cristian
TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI OSSERVABILITA E RICOSTRUIBILITA Ing. Cristian
CONTROLLI AUTOMATICI LS Ingegneria Informatica. Analisi modale
 CONTROLLI AUTOMATICI LS Ingegneria Informatica Analisi modale Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 5 9334 e-mail: claudio.melchiorri@unibo.it http://www-lar.deis.unibo.it/~cmelchiorri
CONTROLLI AUTOMATICI LS Ingegneria Informatica Analisi modale Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 5 9334 e-mail: claudio.melchiorri@unibo.it http://www-lar.deis.unibo.it/~cmelchiorri
Raggiungibilità, Controllabilità, Osservabilità e Determinabilità
 Raggiungibilità, Controllabilità, Osservabilità e Determinabilità Si determini se i sistemi lineari tempo invarianti ẋ(t) = Ax(t) + Bu(t), Σ c : y(t) = Cx(t) + Du(t). x(k + ) = Ax(k) + Bu(k), Σ d : y(k)
Raggiungibilità, Controllabilità, Osservabilità e Determinabilità Si determini se i sistemi lineari tempo invarianti ẋ(t) = Ax(t) + Bu(t), Σ c : y(t) = Cx(t) + Du(t). x(k + ) = Ax(k) + Bu(k), Σ d : y(k)