Esempi di Cinematica Diretta/Inversa. Massimo Cavallari. Corso di Robotica Prof.ssa Giuseppina Gini 2007/2008
|
|
|
- Cornelia Gaetana Elia
- 7 anni fa
- Visualizzazioni
Transcript
1 Eemp Cnemt Drett/Inver Mmo Cvllr Coro Robot rof. Gueppn Gn 7/8

2 Cnemt nver oone e Orentmento ell EnEffetor oone e Gunt Obettvo ell nemt nver è l rer elle relon per l lolo elle vrbl gunto, te l poone e l'orentmento ell orgno termnle. L oluone el problem nemto nvero è notevole mportn per trurre l trettor moto ell orgno termnle ne mot orrponent nello po e gunt. Il problem nemto nvero rult pù ompleo. n generle bogn rolvere equon non lner.. poono vere oluon multple o nfnte.. poono non etere oluon mmbl. Trettor en-effetor

3 Cnemt Inver Mnpoltore RRR Antropomorfo S voglono etermnre gl ngol gunto he permettono ll eneffetor rggungere un etermnto punto ello po. Dto Determnre, e H n o p n o p n o p

4 4 tn p p Cnemt Inver Mnpoltore RRR Antropomorfo Non è utltà perhé preent lun problem prt..

5 Cnemt Inver Mnpoltore RRR Antropomorfo L roluone el problem nemto nvero neet un frequente utlo elle funon trgonometrhe nvere. Le funon trgonometrhe nvere preentno però lun problem prt. Seno, oeno e tngente non mmettono funone nver unvo Inoltre v è l problem ell urte on u etermnno gl ngol E: tn non è efnt quno l ngolo vle -9 o 9, noltre per vlor prom quet non grnte un uffente urte. 5

6 L funone tn non è unvo en tn o en45 en 5 tn45 tn 5 o45 o 5 tn /

7 er ovvre quet problem utl l funone trgonometr nver tn,. L funone tn lol l ngolo utlno ue rgoment. Il egno quet rgoment vene utlto per etermnre l qurnte el rultto. Inoltre l funone tn grnte un urte unforme n tutto l mpo efnone. /

8 Trovmo l prmo ngolo gunto utlno l funone tn Atn p, p M ete un ltr oluone Anhe l eguente è un oluone per ' π A tn p, p ptto he π- e π - 8

9 Il problem nemto nvero è rtterto peo ll moltepltà elle oluon. E poble nftt portre l tern etremtà nell te poone on un numero onfguron gunto vere. Un mnpoltore ntropomorfo può rggungere lo teo punto ello po ttrvero 4 onfguron fferent. ' π A tn p, p π- π - Bro Detro Gomto Alto Bro Sntro Gomto Alto Bro Detro Gomto Bo Bro Sntro Gomto Bo 9

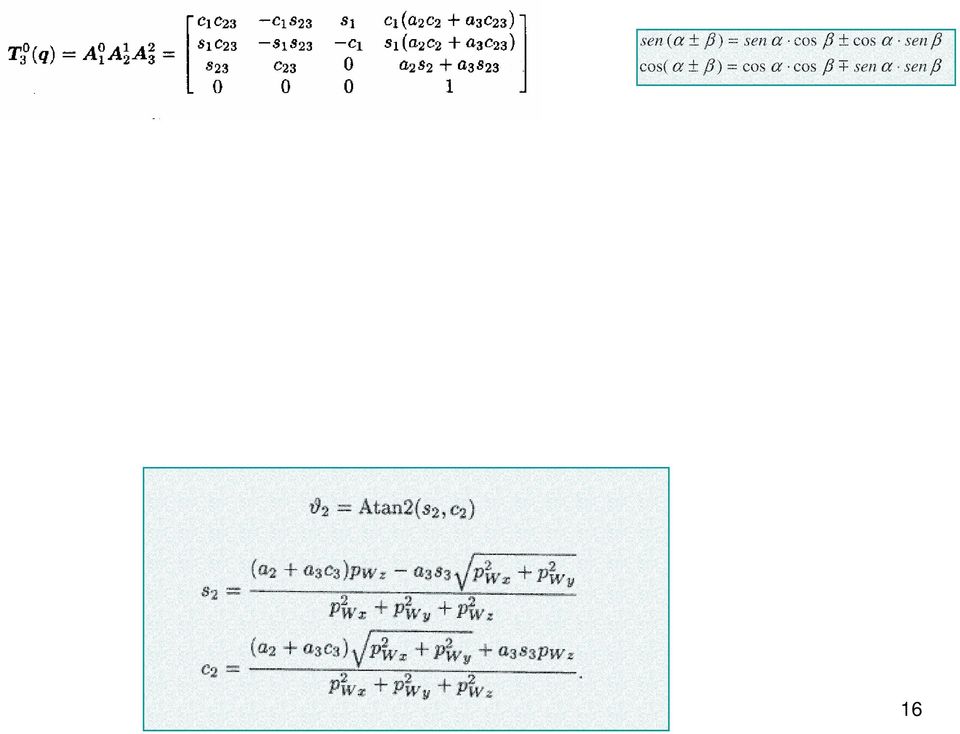
10 , tn A en en en en en m o o o o o Dobbmo trovre Co Co Co Co

11

12 er lolre rolve un tem lgebro on nognt en en o o en o o o m en en

13 en en en en en m o o o o o
14 4 en en en en en m o o o o o

15 5 en en en en en m o o o o o S rogle S rogle

16 en en o o en o o o m en en 6
17 Robot SCARA 4 π ngolo fr l e - e ttorno - tn fr - e murt lungo l reone - lunghe el lnk, tn fr - e lungo l e. lunghe el lnk ngolo fr gl - e ntorno. 7

18 8 Robot SCARA nemt rett 4 4 π , ,4,,,, T A A A A A

19 ,4 T Dto etermnre : D,, Non onermo l ultmo gl gunto 4 D H n o p n o p n o p 4

20 ,4 T en en en en en m o o o o o Co, tn

21 l l ϑ tn l, l
22 ,4 T en en en en en m o o o o o
23 ,4 T en en en en en m o o o o o
24 4, tn
25 Robot Clnro RTT Cnemt rett L o o 5
26 6 Robot Clnro RTT Cnemt rett, A L 9 9
27 7 Robot Clnro RTT Cnemt rett, A L 9 9
28 8 Robot Clnro RTT Cnemt rett,, L T L T
29 9 Robot Clnro RTT Cnemt Inver, L T, tn L L
30 Robot Clnro RTT Cnemt Inver tn l, L E poble rolvere l problem nemto nvero utlno olo le nformon rguro l nemt rett un robot?
31 Algortmo numero per l roluone el problem nemto nvero Cenn Smulone CnemtDrett unto rggungere onoono le oornte M non onoono vlor e gunt el robot f Dtn tr en-effetor e punto rggungere f oone En-Effetor Clolt no gunt un vlore prten f { q... q,,, } q tn en effetor n l problem he ntene rolvere rult equvlente ll rer el mnmo globle un funone multmenonle. Lo opo ele rebbe quello trovre un vettore tle he Vrbl gunto
32 Algortmo numero per l roluone el problem nemto nvero Cenn Mnm lol e globl mnm l funone errore
33 Algortmo numero per l roluone el problem nemto nvero Cenn Defnone mtemt el grente n uno po R Il grente è qun l grne he n reone e vero eono u h l mm vrone ell funone f,, oltre he l enttà quet vrone. Il grente vene efnto ome grne vettorle.
34 Algortmo numero per l roluone el problem nemto nvero Cenn er mnmre l funone f pomo utlre l e el grente. L lgortmo eegue eguent p prnpl: Clolo ell nemt rett Clolo ell tn tr poone ell en effetor e poone rggungere Clolo el grente per ogn vrble gunto. L lgortmo termn quno l errore tr l poone ell en-effetor e l punto è mnore un etermnto vlore A ogn terone. ogn gunto vene movmentto nell reone he etermn un mnuone ell tn tr en-effetor e poone rggungere. NB: L e el grente è un ten ottmone tpo lole he non grnte trovre l oluone ottm l problem. 4
35 Algortmo numero per l roluone el problem nemto nvero Cenn 5
Esempi di Cinematica Diretta/Inversa. Massimo Cavallari. Corso di Robotica Prof.ssa Giuseppina Gini 2007/2008
 Eemp Cnemt Drett/Inver Mmo Cvllr Coro Robot Prof. Gueppn Gn 7/8 Cnemt rett: Pozone e Gunt Pozone e Orentmento ell EnEffetor Obettvo ell nemt rett è l etermnzone ell pozone e orentmento ell orgno termnle
Eemp Cnemt Drett/Inver Mmo Cvllr Coro Robot Prof. Gueppn Gn 7/8 Cnemt rett: Pozone e Gunt Pozone e Orentmento ell EnEffetor Obettvo ell nemt rett è l etermnzone ell pozone e orentmento ell orgno termnle
Controllo del moto e robotica industriale
 Controllo el moto e robot nutrle Rhm nemt Prof. Polo Roo (olo.roo@olm.t) Not: I egn rortt n quete le ono trtt l teto: L.Svo, B.Slno Robot nutrle Moellt e ontrollo robot mnoltor ( e.) M Grw-Hll, Il tem
Controllo el moto e robot nutrle Rhm nemt Prof. Polo Roo (olo.roo@olm.t) Not: I egn rortt n quete le ono trtt l teto: L.Svo, B.Slno Robot nutrle Moellt e ontrollo robot mnoltor ( e.) M Grw-Hll, Il tem
Controllo del moto e robotica industriale
 Controllo el moto e root nutrle Rhm nemt Prof. Polo Roo (olo.roo@olm.t) Not: I egn rortt n uete le ono trtt l teto: L.Svo, B.Slno Root nutrle Moellt e ontrollo root mnoltor ( e.) M Grw-Hll, Il tem meno
Controllo el moto e root nutrle Rhm nemt Prof. Polo Roo (olo.roo@olm.t) Not: I egn rortt n uete le ono trtt l teto: L.Svo, B.Slno Root nutrle Moellt e ontrollo root mnoltor ( e.) M Grw-Hll, Il tem meno
Controllo dei Robot 1
 Tble of ontent Introduton Cnemt Prte Dprtmento d Ing. Elettr e dell Informzone (DEI) Polteno d Br e-ml: polo.lno [t] polb.t Coro d Cnemt drett S onder un mnpoltore ottuto d n + br onne n t (ten pert) trmte
Tble of ontent Introduton Cnemt Prte Dprtmento d Ing. Elettr e dell Informzone (DEI) Polteno d Br e-ml: polo.lno [t] polb.t Coro d Cnemt drett S onder un mnpoltore ottuto d n + br onne n t (ten pert) trmte
Controllo dei Robot. Corso di Controllo dei Robot Cinematica Parte 2. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Coro d Cnemt Prte Polo Lno Dprtmento d Ing. Elettr e dell Informzone (DEI) Cnemt drett Un mnpoltore è ottuto d un neme d orp rgd (br) onne n t trmte oppe nemthe (gunt). S ume he d ogn gunto orrpond un
Coro d Cnemt Prte Polo Lno Dprtmento d Ing. Elettr e dell Informzone (DEI) Cnemt drett Un mnpoltore è ottuto d un neme d orp rgd (br) onne n t trmte oppe nemthe (gunt). S ume he d ogn gunto orrpond un
Convenzione Il vettore di modulo 0 é indicato con 0. Definizione Un vettore di modulo 1 é chiamato versore
 Vettor. Un vettore è ndvduto nello spo o nel pno ssegnndo tre grndee: Lunghe o Modulo o Intenstà: defnt d un numero rele non negtvo Dreone nlnone d un rett rspetto gl ss rtesn Verso Può rppresentto d segment
Vettor. Un vettore è ndvduto nello spo o nel pno ssegnndo tre grndee: Lunghe o Modulo o Intenstà: defnt d un numero rele non negtvo Dreone nlnone d un rett rspetto gl ss rtesn Verso Può rppresentto d segment
Convenzione Il vettore di modulo 0 é indicato con 0. Definizione Un vettore di modulo 1 é chiamato versore
 Vettor. Un vettore è ndvduto nello spo o nel pno ssegnndo tre grndee: Lunghe o Modulo o Intenstà: defnt d un numero rele non negtvo Dreone nlnone d un rett rspetto gl ss rtesn Verso Può rppresentto d segment
Vettor. Un vettore è ndvduto nello spo o nel pno ssegnndo tre grndee: Lunghe o Modulo o Intenstà: defnt d un numero rele non negtvo Dreone nlnone d un rett rspetto gl ss rtesn Verso Può rppresentto d segment
CINEMATICA INVERSA. Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona
 CINEMATICA INVERSA Paolo Forn Dpartmento d Informata Unvertà degl Stud d Verona Introduzone Cnemata Dretta Dat: angol a gunt Calola: pozone e orentamento organo termnale Cnemata Invera Dat: pozone e orentamento
CINEMATICA INVERSA Paolo Forn Dpartmento d Informata Unvertà degl Stud d Verona Introduzone Cnemata Dretta Dat: angol a gunt Calola: pozone e orentamento organo termnale Cnemata Invera Dat: pozone e orentamento
Analisi sistematica delle strutture. Rigidezza
 Anls sstemt elle strutture Rgezz u U x y v Trve nel pno v Vettore forze nol Vettore spostment nol θ u θ u U u V v Tre gr lertà per noo Due no per elemento x U θ u Se gr lertà per elemento V v tre rgezz
Anls sstemt elle strutture Rgezz u U x y v Trve nel pno v Vettore forze nol Vettore spostment nol θ u θ u U u V v Tre gr lertà per noo Due no per elemento x U θ u Se gr lertà per elemento V v tre rgezz
terna base, dalla matrice di trasformazione omogenea Terna utensile
 Cnemt drett Un mnpoltore è ottuto d un neme d orp rgd (br) onne n t trmte oppe nemthe (gunt). S ume he d ogn gunto orrponde un grdo d mobltà dell truttur. d ogn gunto noltre vene ot un vrble dett vrble
Cnemt drett Un mnpoltore è ottuto d un neme d orp rgd (br) onne n t trmte oppe nemthe (gunt). S ume he d ogn gunto orrponde un grdo d mobltà dell truttur. d ogn gunto noltre vene ot un vrble dett vrble
Fondamenti di robotica
 Fondment d robot Cnemt dfferenle e tt rof. G. Mgnn (mgnn@elet.olm.t) Not: Dver degn rortt n uete lde ono trtt dl teto: L.Svo, B.Slno Robot ndutrle Modellt e ontrollo d robot mnoltor ( ed.) M Grw-Hll, Cnemt
Fondment d robot Cnemt dfferenle e tt rof. G. Mgnn (mgnn@elet.olm.t) Not: Dver degn rortt n uete lde ono trtt dl teto: L.Svo, B.Slno Robot ndutrle Modellt e ontrollo d robot mnoltor ( ed.) M Grw-Hll, Cnemt
Università degli studi di Cagliari
 Unvertà degl tud d Cglr Anno demo 8/9 Relzone ull ttvtà d lbortoro per l oro d Robot Indutrle d Alberto Tnd - Mt. 787 Introduzone Quet elborto vrà lo opo d dervere l ttvtà d lbortoro volt per l oro d Robot
Unvertà degl tud d Cglr Anno demo 8/9 Relzone ull ttvtà d lbortoro per l oro d Robot Indutrle d Alberto Tnd - Mt. 787 Introduzone Quet elborto vrà lo opo d dervere l ttvtà d lbortoro volt per l oro d Robot
Linearità. linearità = omogeneità + additività. matematica lineare fra causa ed effetto. Elemento lineare: presenta una relazione
 Lnertà Elemento lnere: preent un relzone mtemtc lnere fr cu ed effetto. Eempo: v/ relzone lnere 0 e αv relzone non lnere lnertà omogenetà ddtvtà Se l ngreo vene moltplcndo per un fttore cotnte, l uct rult
Lnertà Elemento lnere: preent un relzone mtemtc lnere fr cu ed effetto. Eempo: v/ relzone lnere 0 e αv relzone non lnere lnertà omogenetà ddtvtà Se l ngreo vene moltplcndo per un fttore cotnte, l uct rult
ANALISI DELLA REGRESSIONE ANALISI BIVARIATA DELLA REGRESSIONE
 ANALII DELLA REGREIONE L Al dell Regreoe rgurd lo tudo delle relzo etet r o pù rtter qutttv o vrl. L rer de legm etet r pù vrl poe ome rer delle relzo uzol he pogoo Y ome grdezz dpedete d u ere d vrl dpedet
ANALII DELLA REGREIONE L Al dell Regreoe rgurd lo tudo delle relzo etet r o pù rtter qutttv o vrl. L rer de legm etet r pù vrl poe ome rer delle relzo uzol he pogoo Y ome grdezz dpedete d u ere d vrl dpedet
Controllo dei robot. Cinematica differenziale e statica. Parte I. Cinematica differenziale. Cinematica differenziale e statica
 Controllo e robot Cnemt fferenle e tt Prof. Polo oo (olo.roo@olm.t) Not: Dver egn rortt n uete le ono trtt l teto: L.Svo, B.Slno obot nutrle Moellt e ontrollo robot mnoltor ( e.) M Grw-Hll, Cnemt fferenle
Controllo e robot Cnemt fferenle e tt Prof. Polo oo (olo.roo@olm.t) Not: Dver egn rortt n uete le ono trtt l teto: L.Svo, B.Slno obot nutrle Moellt e ontrollo robot mnoltor ( e.) M Grw-Hll, Cnemt fferenle
Pierpaolo De Filippi Dipartimento di Elettronica e Informazione Via Ponzio 34/ Ricevimento: solo su appuntamento
 Polteno d Mlano Cnemata Dretta e Invera Fondament d obota a.a. / Perpaolo De Flpp Fondament d obota Contatt Perpaolo De Flpp Dpartmento d Elettrona e Informazone Va Ponzo 34/5 39947 evmento: olo u appuntamento
Polteno d Mlano Cnemata Dretta e Invera Fondament d obota a.a. / Perpaolo De Flpp Fondament d obota Contatt Perpaolo De Flpp Dpartmento d Elettrona e Informazone Va Ponzo 34/5 39947 evmento: olo u appuntamento
Controllo dei robot. Cinematica. Prof. Paolo Rocco
 Contollo e obot Cnemt Pof. Polo oo (olo.oo@olm.t) Not: I egn ott n quete le ono ttt l teto: L.Svo, B.Slno obot nutle Moellt e ontollo obot mnolto ( e.) M Gw-Hll, Contollo e obot - Cnemt - P. oo [] Poone
Contollo e obot Cnemt Pof. Polo oo (olo.oo@olm.t) Not: I egn ott n quete le ono ttt l teto: L.Svo, B.Slno obot nutle Moellt e ontollo obot mnolto ( e.) M Gw-Hll, Contollo e obot - Cnemt - P. oo [] Poone
Diagrammi di Bode. (versione del ) Funzioni di trasferimento
 Funzioni di trasferimento") Dgr d Bode www.de.g.uo.t/er/tr/ddtt.ht veroe del 5-- Fuo d trfereto Le fuo d trfereto f.d.t de rut ler teo vrt oo fuo rol oè rort tr due olo oeffet rel dell vrle Per evtre d trttre eltete quttà gre, trodue
Dgr d Bode www.de.g.uo.t/er/tr/ddtt.ht veroe del 5-- Fuo d trfereto Le fuo d trfereto f.d.t de rut ler teo vrt oo fuo rol oè rort tr due olo oeffet rel dell vrle Per evtre d trttre eltete quttà gre, trodue
Il piano cartesiano e la retta
 Cpitolo Eserizi Il pino rtesino e l rett Teori p. Coorinte rtesine nel pino Stilisi ove si trov isuno ei punti ti. (I I qurnte, II II qurnte, III III qurnte, IV IV qurnte, x sse x, y sse y) A(0, 8) B(,
Cpitolo Eserizi Il pino rtesino e l rett Teori p. Coorinte rtesine nel pino Stilisi ove si trov isuno ei punti ti. (I I qurnte, II II qurnte, III III qurnte, IV IV qurnte, x sse x, y sse y) A(0, 8) B(,
Introduzione al Calcolo Strutturale Matriciale
 0/6/05 Introzone l Clolo Strttrle Mtrle Dlle pene el prof. Dro Amoo e lle lezon el prof. Gonn Snt.Cortee Progettzone Men gl Element nt ( 05-06) Introzone l lolo trttrle mtrle Strttr ret Per trttr ret ntene
0/6/05 Introzone l Clolo Strttrle Mtrle Dlle pene el prof. Dro Amoo e lle lezon el prof. Gonn Snt.Cortee Progettzone Men gl Element nt ( 05-06) Introzone l lolo trttrle mtrle Strttr ret Per trttr ret ntene
Moto circolare uniformemente accelerato
 Moto circolre uniforeente ccelerto el M.C.U.A. il vettore velocità non h più il odulo cotnte, è preente invece un ccelerzione dett ccelerzione tngenzile che i ntiene cotnte. Ripenndo ll circonferenz tglit
Moto circolre uniforeente ccelerto el M.C.U.A. il vettore velocità non h più il odulo cotnte, è preente invece un ccelerzione dett ccelerzione tngenzile che i ntiene cotnte. Ripenndo ll circonferenz tglit
Il lavoro è quindi una grandezza scalare le cui unita di misura sono: = Joule = J
 Ve. el 9/0/09 Lvoo e Eneg Denzone lvoo pe un oz cotnte Se un oz cotnte gce u un copo che eettu uno potmento ce che l oz compe un lvoo ento come: co ( co ) ove è l componente ell oz pllel llo potmento.
Ve. el 9/0/09 Lvoo e Eneg Denzone lvoo pe un oz cotnte Se un oz cotnte gce u un copo che eettu uno potmento ce che l oz compe un lvoo ento come: co ( co ) ove è l componente ell oz pllel llo potmento.
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA. Scuola Secondaria Superiore Classe terza. Scuola... Classe... Alunno...
 VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri Superiore Clsse terz Suol..........................................................................................................................................
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri Superiore Clsse terz Suol..........................................................................................................................................
Legge dei grandi numeri e significato probabilistico della distribuzione normale
 Legge dei grndi numeri e ignificto probbilitico dell ditribuione normle Sppimo che l quntità f()d rppreent un indictore dell frione di miure che cdono tr e + d in un dto eperimento qundo l vribile X egue
Legge dei grndi numeri e ignificto probbilitico dell ditribuione normle Sppimo che l quntità f()d rppreent un indictore dell frione di miure che cdono tr e + d in un dto eperimento qundo l vribile X egue
VERSO L ESAME DI STATO SCUOLA SECONDARIA DI PRIMO GRADO PROVA DI MATEMATICA
 VERSO L ESAME DI STATO SCUOLA SECONDARIA DI PRIMO GRADO PROVA DI MATEMATICA trtto Mtemti in zione, A. Arpinti, M. Musini Mettimoi ll prov! Suol..........................................................................................................................................
VERSO L ESAME DI STATO SCUOLA SECONDARIA DI PRIMO GRADO PROVA DI MATEMATICA trtto Mtemti in zione, A. Arpinti, M. Musini Mettimoi ll prov! Suol..........................................................................................................................................
QUINTA LEZIONE: corrente elettrica, legge di ohm, carica e scarica di un condensatore, leggi di Kirchoff
 A. hoon esercz Fsc II QUINTA LEZIONE: corrente elettrc, legge ohm, crc e scrc un conenstore, legg Krchoff Eserczo Un conuttore clnrco n rme vente sezone re S mm è percorso un corrente ntenstà 8A. lcolre
A. hoon esercz Fsc II QUINTA LEZIONE: corrente elettrc, legge ohm, crc e scrc un conenstore, legg Krchoff Eserczo Un conuttore clnrco n rme vente sezone re S mm è percorso un corrente ntenstà 8A. lcolre
Monomi e polinomi. Verifica per la classe prima COGNOME... NOME... Classe... Data...
 Cpitolo Monomi e polinomi Monomi Verifi per l lsse prim COGNOME............................... NOME............................. Clsse.................................... Dt...............................
Cpitolo Monomi e polinomi Monomi Verifi per l lsse prim COGNOME............................... NOME............................. Clsse.................................... Dt...............................
I vettori. Grandezze scalari: Grandezze vettoriali
 Grndee sclr: I ettor engono defnte dl loro lore numerco esemp: lunghe d un segmento, re d un fgur pn, tempertur d un corpo, ecc. Grndee ettorl engono defnte, oltre che dl loro lore numerco, d un dreone
Grndee sclr: I ettor engono defnte dl loro lore numerco esemp: lunghe d un segmento, re d un fgur pn, tempertur d un corpo, ecc. Grndee ettorl engono defnte, oltre che dl loro lore numerco, d un dreone
Analisi Matematica I per Ingegneria Gestionale, a.a Primo compitino, 18 novembre 2017 Testi 1
 Primo ompitino, 8 novemre 07 Testi Prim prte, gruppo. =, = ; r = α = = 0, = 4; r = α = r = 3, α = π/3; = =. Trovre le soluzioni ell isuguglinz tn( tli he 0 π. + log log(log ; lim + os(e ; lim 4. Clolre
Primo ompitino, 8 novemre 07 Testi Prim prte, gruppo. =, = ; r = α = = 0, = 4; r = α = r = 3, α = π/3; = =. Trovre le soluzioni ell isuguglinz tn( tli he 0 π. + log log(log ; lim + os(e ; lim 4. Clolre
I segmenti orientati
 I vettor Untà Pgn 1 d 5 I egment orentt Dll geometr euclde ppmo che l egmento è l prte fnt d rett delmtt d due punt dett etrem del egmento. Defnmo egmento orentto un qul egmento ul qule è tto fto un vero
I vettor Untà Pgn 1 d 5 I egment orentt Dll geometr euclde ppmo che l egmento è l prte fnt d rett delmtt d due punt dett etrem del egmento. Defnmo egmento orentto un qul egmento ul qule è tto fto un vero
1.1 Identificazione del campo di operatività di un motore AC brushless. Sia dato un motore AC brushless isotropo di cui siano noti i seguenti dati:
 Captolo 1 1.1 Ientfcazone el campo operatvtà un motore AC bruhle Sa ato un motore AC bruhle otropo cu ano not eguent at: Vn = 190 V In = 3.5 A Tn =.6 N n pol = R = 1 Ω L = 8 mh Ke = Kt = 0.4 S etermn l
Captolo 1 1.1 Ientfcazone el campo operatvtà un motore AC bruhle Sa ato un motore AC bruhle otropo cu ano not eguent at: Vn = 190 V In = 3.5 A Tn =.6 N n pol = R = 1 Ω L = 8 mh Ke = Kt = 0.4 S etermn l
Analisi Matematica I per Ingegneria Gestionale, a.a Scritto del quinto appello, 3 luglio 2017 Testi 1
 nlisi Mtemti I per Ingegneri Gestionle,.. 6-7 Sritto el quinto ppello, 3 luglio 7 Testi Prim prte, gruppo.. Dire per quli R l funzione f() := sin( 3 ) + 3 è resente su tutto R.. Disporre le seguenti funzioni
nlisi Mtemti I per Ingegneri Gestionle,.. 6-7 Sritto el quinto ppello, 3 luglio 7 Testi Prim prte, gruppo.. Dire per quli R l funzione f() := sin( 3 ) + 3 è resente su tutto R.. Disporre le seguenti funzioni
I vettori. Grandezze scalari: Grandezze ve9oriali
 I ettor Grndee sclr: engono defnte dl loro lore numerco esemp: lunghe d un segmento, re d un fgur pn, tempertur d un corpo, ecc. Grndee e9orl engono defnte, oltre che dl loro lore numerco, d un dreone
I ettor Grndee sclr: engono defnte dl loro lore numerco esemp: lunghe d un segmento, re d un fgur pn, tempertur d un corpo, ecc. Grndee e9orl engono defnte, oltre che dl loro lore numerco, d un dreone
1) TEOREMA: OGNI TRIANGOLO E INSCRIVIBILE/CIRCOSCRIVIBILE IN/AD UNA CIRCONFERENZA
 TEOREMA: OGNI TRIANGOLO E INSCRIVIBILE/CIRCOSCRIVIBILE IN/AD UNA CIRCONFERENZA") 1) TEORE: OGNI TRINGOLO E INSRIVIILE/IROSRIVIILE IN/ UN IRONFERENZ TRINGOLO INSRITTO: isegniamo il triangolo. Si tracciano i due assi r ed s dei lati e. Indichiamo con il loro punto di incontro. Sappiamo
1) TEORE: OGNI TRINGOLO E INSRIVIILE/IROSRIVIILE IN/ UN IRONFERENZ TRINGOLO INSRITTO: isegniamo il triangolo. Si tracciano i due assi r ed s dei lati e. Indichiamo con il loro punto di incontro. Sappiamo
Equazioni di secondo grado Capitolo
 Equzioni i seono gro Cpitolo Risoluzione lgeri Verifi per l lsse seon COGNOME............................... NOME............................. Clsse.................................... Dt...............................
Equzioni i seono gro Cpitolo Risoluzione lgeri Verifi per l lsse seon COGNOME............................... NOME............................. Clsse.................................... Dt...............................
Rendite a rate costanti posticipate in regime di interessi composti
 Redte rte cott regme d tere compot Redte rte cott potcpte regme d tere compot /32 Redte rte cott potcpte regme d tere compot 2/32 Redte rte cott potcpte regme d tere compot VALORE ATTUALE DI UNA RENDITA
Redte rte cott regme d tere compot Redte rte cott potcpte regme d tere compot /32 Redte rte cott potcpte regme d tere compot 2/32 Redte rte cott potcpte regme d tere compot VALORE ATTUALE DI UNA RENDITA
Scrivere 2.1 cm implica dire che la misura sia compresa nell intervallo mm
 Il lto d un ddo è pr. cm. Usndo le cfre sgnfctve per stmre l errore clcolre l volume del cuo. Supponendo che l devzone stndrd nell msur del lto s d mm clcolre l devzone stndrd che ssoct ll msur del volume.
Il lto d un ddo è pr. cm. Usndo le cfre sgnfctve per stmre l errore clcolre l volume del cuo. Supponendo che l devzone stndrd nell msur del lto s d mm clcolre l devzone stndrd che ssoct ll msur del volume.
L IPERBOLE. L iperbole è il luogo geometrico dei punti del piano per i quali è costante la differenza delle distanze da due punti fissi detti fuochi.
 prof.ss Cterin Vespi 1 Appunti di geometri nliti L IPERBOLE L iperole è il luogo geometrio dei punti del pino per i quli è ostnte l differenz delle distnze d due punti fissi detti fuohi. Sino F1 e F i
prof.ss Cterin Vespi 1 Appunti di geometri nliti L IPERBOLE L iperole è il luogo geometrio dei punti del pino per i quli è ostnte l differenz delle distnze d due punti fissi detti fuohi. Sino F1 e F i
ANALISI DELLA REGRESSIONE ANALISI BIVARIATA DELLA REGRESSIONE
 ANALII DELLA REGREIONE L Al dell Regreoe rgurd lo tudo delle relzo etet r o pù crtter qutttv o vrl. L rcerc de legm etet r pù vrl poe come rcerc delle relzo uzol che pogoo come grdezz dpedete d u ere d
ANALII DELLA REGREIONE L Al dell Regreoe rgurd lo tudo delle relzo etet r o pù crtter qutttv o vrl. L rcerc de legm etet r pù vrl poe come rcerc delle relzo uzol che pogoo come grdezz dpedete d u ere d
Corso di Costruzione di Macchine e Progettazione agli Elementi Finiti
 9/8/06 Dprtmento Ingegner Men e Aeropzle Unvertà Rom L Spenz Coro Cotruzone Mhne e Progettzone gl Element nt Doente: Prof. Govnn Broggto Doente: Ing. Lu Cortee eml: govnn.broggto@unrom.t, lu.ortee@unrom.t
9/8/06 Dprtmento Ingegner Men e Aeropzle Unvertà Rom L Spenz Coro Cotruzone Mhne e Progettzone gl Element nt Doente: Prof. Govnn Broggto Doente: Ing. Lu Cortee eml: govnn.broggto@unrom.t, lu.ortee@unrom.t
Corso di Costruzione di Macchine e Progettazione agli Elementi Finiti
 Dprtmento Ingegner Men e Aeropzle Unvertà Rom L Spenz Coro Cotruzone Mhne e Progettzone gl Element nt Doente: Ing. Lu Cortee, Prof. Govnn Broggto eml: lu.ortee@unrom.t, govnn.broggto@unrom.t, uffo: Dprtmento
Dprtmento Ingegner Men e Aeropzle Unvertà Rom L Spenz Coro Cotruzone Mhne e Progettzone gl Element nt Doente: Ing. Lu Cortee, Prof. Govnn Broggto eml: lu.ortee@unrom.t, govnn.broggto@unrom.t, uffo: Dprtmento
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA. Scuola Secondaria Superiore Classe Prima. Scuola... Classe... Alunno...
 VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri Superiore Clsse Prim Suol..........................................................................................................................................
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri Superiore Clsse Prim Suol..........................................................................................................................................
CINEMATICA DIRETTA. Introduzione. Giunti e Bracci. Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona
 CINEMATICA DIETTA Paolo Forn Dpartmento d Informata Unvertà degl Stud d Verona ALTAI -- Computer Sene Department Unverty of Verona Faoltá d Senze Motore, Coro d Bongegnera, Parte http://metropol..unvr.t
CINEMATICA DIETTA Paolo Forn Dpartmento d Informata Unvertà degl Stud d Verona ALTAI -- Computer Sene Department Unverty of Verona Faoltá d Senze Motore, Coro d Bongegnera, Parte http://metropol..unvr.t
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA. Scuola Secondaria di Primo Grado Classe Prima. Scuola... Classe... Alunno...
 VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri i Primo Gro Clsse Prim Suol..........................................................................................................................................
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri i Primo Gro Clsse Prim Suol..........................................................................................................................................
La rappresentazione per elencazione consiste nell elencare tutte le coppie ordinate che verificano la relazione
 RELAZIONI E FUNZIONI Relzioni inrie Dti ue insiemi non vuoti e (he possono eventulmente oiniere), si ie relzione tr e un qulsisi legge he ssoi elementi elementi. L insieme A è etto insieme i prtenz. L
RELAZIONI E FUNZIONI Relzioni inrie Dti ue insiemi non vuoti e (he possono eventulmente oiniere), si ie relzione tr e un qulsisi legge he ssoi elementi elementi. L insieme A è etto insieme i prtenz. L
d coulomb d volt b trasformatore d alternatore b amperometro d reostato
 ppunti 7 TEST DI VERIFICA 1 Unità i misur ell ri elettri: henry weer volt oulom 2 Unità i misur ell pità elettri: oulom henry fr volt 3 Gener orrente lternt: umultore resistenz 4 Misur l tensione: resistometro
ppunti 7 TEST DI VERIFICA 1 Unità i misur ell ri elettri: henry weer volt oulom 2 Unità i misur ell pità elettri: oulom henry fr volt 3 Gener orrente lternt: umultore resistenz 4 Misur l tensione: resistometro
Interpolazione dei dati
 Unverstà degl Stud d Br Dprtmento d Chmc 9 gugno 0 F.Mvell Lortoro d Chmc Fsc I.. 0-0 Interpolzone Curve Interpolzone de dt Qundo s conosce l legge fsc che mette n relzone tr loro due vrl e, mednte prmetr,,
Unverstà degl Stud d Br Dprtmento d Chmc 9 gugno 0 F.Mvell Lortoro d Chmc Fsc I.. 0-0 Interpolzone Curve Interpolzone de dt Qundo s conosce l legge fsc che mette n relzone tr loro due vrl e, mednte prmetr,,
Strumenti Matematici per la Fisica
 Strumenti Mtemtici per l Fisic Strumenti Mtemtici per l Fisic Approssimzioni Notzione scientific (o esponenzile) Ordine di Grndezz Sistem Metrico Decimle Equivlenze Proporzioni e Percentuli Relzioni fr
Strumenti Mtemtici per l Fisic Strumenti Mtemtici per l Fisic Approssimzioni Notzione scientific (o esponenzile) Ordine di Grndezz Sistem Metrico Decimle Equivlenze Proporzioni e Percentuli Relzioni fr
CINEMATICA DIRETTA. Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona
 CINEMATICA DIRETTA Paolo Forn Dpartmento d Informata Unvertà degl Stud d Verona Introduzone Manpolatore: atena nemata (aperta) d orp rgd (bra) e gunt (rotodal e prmat) Per poter manpolare un oggetto nello
CINEMATICA DIRETTA Paolo Forn Dpartmento d Informata Unvertà degl Stud d Verona Introduzone Manpolatore: atena nemata (aperta) d orp rgd (bra) e gunt (rotodal e prmat) Per poter manpolare un oggetto nello
Definizione. Si chiama similitudine una corrispondenza biunivoca dal piano in sé tale che,
 CAPITOLO 6 LE SIMILITUDINI 6 Rihimi i teori Definizione Si him similituine un orrisponenz iunivo l pino in sé tle he presi ue punti qulunque A B el pino e etti A B i loro orrisponenti si h he esiste un
CAPITOLO 6 LE SIMILITUDINI 6 Rihimi i teori Definizione Si him similituine un orrisponenz iunivo l pino in sé tle he presi ue punti qulunque A B el pino e etti A B i loro orrisponenti si h he esiste un
Propagazione degli Errori
 Propgone egl Error L mggor prte elle grnee fsche solto non può essere msurt ttrverso un sngol msur rett m vene nvece etermnt n ue pss stnt come etto nell efnone msure nrette:. S msurno un o pù grnee che
Propgone egl Error L mggor prte elle grnee fsche solto non può essere msurt ttrverso un sngol msur rett m vene nvece etermnt n ue pss stnt come etto nell efnone msure nrette:. S msurno un o pù grnee che
Geometria Analitica. Parabola (asse verticale) Geometria Analitica La retta. ; y2. x = y = y = ax parabola passante per l origine e con asse l asse y
 Geometria Analitica La retta. ; y2. x = y = y = ax parabola passante per l origine e con asse l asse y") Geometr Anlt Dstnz tr due punt nel pno rtesno P ( x x ) + ( y ) P y Punto medo d due punt nel pno rtesno M x + x y + ( x ; y ) ; M M y Are d un trngolo nel pno rtesno prtre dlle oordnte de suo x y punt
Geometr Anlt Dstnz tr due punt nel pno rtesno P ( x x ) + ( y ) P y Punto medo d due punt nel pno rtesno M x + x y + ( x ; y ) ; M M y Are d un trngolo nel pno rtesno prtre dlle oordnte de suo x y punt
Regressione Lineare Semplice
 reressone lnere Reressone nere Semplce Per ottenere l veloctà d un corpo s msur l su poszone vr temp. Spendo che l relzone tr l poszone del corpo s l tempo t è dt dll lee s = v t trovre con l reressone
reressone lnere Reressone nere Semplce Per ottenere l veloctà d un corpo s msur l su poszone vr temp. Spendo che l relzone tr l poszone del corpo s l tempo t è dt dll lee s = v t trovre con l reressone
Cammini minimi in un grafo orientato pesato. Un problema di percorso. Problemi di ottimizzazione
 Cmmn mnm n un gro orntto sto Algortm Dkstr Bllmn-For r l rolm l mmno mnmo sorgnt sngol Un rolm rorso Dt un m strl on stnz s. n lomtr un unto rtnz s tror rors ù r s sun ll ltr loltà Prolm ottmzzzon Prolm:
Cmmn mnm n un gro orntto sto Algortm Dkstr Bllmn-For r l rolm l mmno mnmo sorgnt sngol Un rolm rorso Dt un m strl on stnz s. n lomtr un unto rtnz s tror rors ù r s sun ll ltr loltà Prolm ottmzzzon Prolm:
Regime Permanente. (vedi Vitelli-Petternella par. VI.1,VI.1.1,VI.2)
") Regme Permanente (ve Vtell-Petternella par. VI.,VI..,VI.) Comportamento a regme permanente Clafcazone n tp Conzon a Cclo Chuo Conzon a Cclo Aperto Rpota a Regme per Dturb Cotant Dturbo ulla mura Rpota
Regme Permanente (ve Vtell-Petternella par. VI.,VI..,VI.) Comportamento a regme permanente Clafcazone n tp Conzon a Cclo Chuo Conzon a Cclo Aperto Rpota a Regme per Dturb Cotant Dturbo ulla mura Rpota
MATEMATICA FINANZIARIA 3. RENDITE
 MATEMATICA FINANZIAIA Prof. Adre Berrd 999 3. ENDITE Coro d Mtetc Fzr 999 d Adre Berrd Sezoe 3 ENDITA Operzoe fzr copot, crtterzzt d cdeze (,,...,,...,, rcuotere quelle cdeze,,...,,...,, t e d port d pgre
MATEMATICA FINANZIAIA Prof. Adre Berrd 999 3. ENDITE Coro d Mtetc Fzr 999 d Adre Berrd Sezoe 3 ENDITA Operzoe fzr copot, crtterzzt d cdeze (,,...,,...,, rcuotere quelle cdeze,,...,,...,, t e d port d pgre
Unità Didattica N 32. Le trasformazioni geometriche
 1 Untà Ddttc N Le trsformzon geometrche 1) Le trsformzon del pno n sé ) L smmetr centrle ) L smmetr ssle 4) L trslzone 5) L trslzone degl ss crtesn 6) L ' ffntà 7) L smltudne 8) L omotet 09) Le sometre
1 Untà Ddttc N Le trsformzon geometrche 1) Le trsformzon del pno n sé ) L smmetr centrle ) L smmetr ssle 4) L trslzone 5) L trslzone degl ss crtesn 6) L ' ffntà 7) L smltudne 8) L omotet 09) Le sometre
Liceo Scientifico Statale A. Volta, Torino Anno scolastico 2014 / 2015
 Leo Sentfo Sttle A. Volt, Torno Anno solsto 0 / 0 Cognome e Nome: LOGARITMI ED ESPONENZIALI Complet on l equone d sun funone: A) B) C) D) 0) Qule funone pss per l punto ( ; ) ed è sempre postv? 0) L funone
Leo Sentfo Sttle A. Volt, Torno Anno solsto 0 / 0 Cognome e Nome: LOGARITMI ED ESPONENZIALI Complet on l equone d sun funone: A) B) C) D) 0) Qule funone pss per l punto ( ; ) ed è sempre postv? 0) L funone
SOLUZIONE PROBLEMI Insegnamento di Fisica dell Atmosfera Seconda prova in itinere
 Doente: rof Dino Zri serittore: in lessio Bertò OLUZION PROBLMI Insenento i Fisi ell tosfer eon rov in itinere /3 Vlori elle ostnti Rio terrestre eio: 637 Rio solre eio: 7 5 Distnz ei terr-sole : 9 6 Vlore
Doente: rof Dino Zri serittore: in lessio Bertò OLUZION PROBLMI Insenento i Fisi ell tosfer eon rov in itinere /3 Vlori elle ostnti Rio terrestre eio: 637 Rio solre eio: 7 5 Distnz ei terr-sole : 9 6 Vlore
ESERCIZI IN PIÙ ESERCIZI DI FINE CAPITOLO
 L RLZIONI L FUNZIONI serizi in più SRIZI IN PIÙ SRIZI I FIN PITOLO TST Nell insieme ell figur, l relzione rppresentt goe ell o elle proprietà: TST L relzione «essere isenente i», efinit nell insieme egli
L RLZIONI L FUNZIONI serizi in più SRIZI IN PIÙ SRIZI I FIN PITOLO TST Nell insieme ell figur, l relzione rppresentt goe ell o elle proprietà: TST L relzione «essere isenente i», efinit nell insieme egli
ESERCIZI SVOLTI DEL CORSO DI TRASMISSIONE NUMERICA
 Università egli Stui i rento Corso i Lure in Ingegneri elle eleomunizioni ESERCIZI SVOLI DEL CORSO DI RASMISSIONE NUMERICA Prof Lorenzo Bruzzone ESERCIZIO Costruire un oie vente n=3, k=2 on rità isri,
Università egli Stui i rento Corso i Lure in Ingegneri elle eleomunizioni ESERCIZI SVOLI DEL CORSO DI RASMISSIONE NUMERICA Prof Lorenzo Bruzzone ESERCIZIO Costruire un oie vente n=3, k=2 on rità isri,
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA. Scuola Secondaria di Primo Grado Classe Prima. Scuola... Classe... Alunno...
 VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri i Primo Gro Clsse Prim Suol..........................................................................................................................................
VALUTAZIONE DELLE CONOSCENZE E DELLE ABILITÀ DI BASE PROVA DI MATEMATICA Suol Seonri i Primo Gro Clsse Prim Suol..........................................................................................................................................
Soluzioni A - Test d ingresso alla Prova Scritta di Controlli Automatici A del 8 Maggio 2004
 Soluzioni A - Tet d ingreo ll Prov Sritt di Controlli Automtii A del 8 Mggio 004 ) Srivere l funzione di trferimento di un item dinmio vente i modi{ t in(4 t e t ϕ), te in(4 t ϕ) } T() ( ) 6 ( ) ) Dto
Soluzioni A - Tet d ingreo ll Prov Sritt di Controlli Automtii A del 8 Mggio 004 ) Srivere l funzione di trferimento di un item dinmio vente i modi{ t in(4 t e t ϕ), te in(4 t ϕ) } T() ( ) 6 ( ) ) Dto
Controllo dei robot. (Prof. Rocco) Appello del 14 Luglio Firma:...
 Appello del 14 Luglio Firma:...") Controllo de robot (Prof. Roo) Appello del 14 Luglo 2010 Cognome:... Nome:... Matrola:... Frma:... Avvertenze: Il preente faolo ompone d 8 pagne (omprea la opertna). Tutte le pagne utlzzate vanno frmate.
Controllo de robot (Prof. Roo) Appello del 14 Luglo 2010 Cognome:... Nome:... Matrola:... Frma:... Avvertenze: Il preente faolo ompone d 8 pagne (omprea la opertna). Tutte le pagne utlzzate vanno frmate.
Cenni di Dinamica. La dinamica studia le cause del moto:
 enn Dnm nm stu le use el moto: legge Newton o legge nerz: n un sstem nerzle un oro ermne nel suo stto quete o moto unorme. legge Newton: un orz lt un oro mss m orrsone un elerzone t ll relzone: F = m (F
enn Dnm nm stu le use el moto: legge Newton o legge nerz: n un sstem nerzle un oro ermne nel suo stto quete o moto unorme. legge Newton: un orz lt un oro mss m orrsone un elerzone t ll relzone: F = m (F
I vettori. Grandezze scalari e grandezze vettoriali
 I vetto Gndee sl e gndee vettol Vettoe: ente mtemto tteto d te qunttà modulo deone veso I vetto sono pplt n un punto (esste un numeo nfnto d vetto equpollent, oé on modulo, deone e veso ugul, m pplt n
I vetto Gndee sl e gndee vettol Vettoe: ente mtemto tteto d te qunttà modulo deone veso I vetto sono pplt n un punto (esste un numeo nfnto d vetto equpollent, oé on modulo, deone e veso ugul, m pplt n
Richiami di cinematica
 Rihimi di inemti rof. Giorgio Butto Dirtimento di Informti e Sitemiti Univerità di vi E-mil: utto@univ.it Sitemi rootii Sono itemi otituiti d un inieme di ori rigidi (link) onnei medinte giunti ttuti.
Rihimi di inemti rof. Giorgio Butto Dirtimento di Informti e Sitemiti Univerità di vi E-mil: utto@univ.it Sitemi rootii Sono itemi otituiti d un inieme di ori rigidi (link) onnei medinte giunti ttuti.
Relazioni e funzioni. Relazioni
 Relzioni e unzioni Relzioni Deinizione: dti due insiemi A e B, si deinise un relzione R tr A e B un orrispondenz stilit d un proposizione tr un elemento A e B, in tl so si die he è in relzione on e si
Relzioni e unzioni Relzioni Deinizione: dti due insiemi A e B, si deinise un relzione R tr A e B un orrispondenz stilit d un proposizione tr un elemento A e B, in tl so si die he è in relzione on e si
Chimica fisica dei materiali. Recupero di matematica. Sergio Brutti
 Chimi fisi dei mterili Repero di mtemti Sergio Brtti Nmeri omplessi Un nmero omplesso è n espressione mtemti ostitit d 3 elementi ( nmeri reli, e l nità immginri i: i i definiione Re Im Dti de nmeri omplessi:
Chimi fisi dei mterili Repero di mtemti Sergio Brtti Nmeri omplessi Un nmero omplesso è n espressione mtemti ostitit d 3 elementi ( nmeri reli, e l nità immginri i: i i definiione Re Im Dti de nmeri omplessi:
Metodo di massima verosimiglianza (cenni) Maximum Likelyhood
 Maximum Likelyhood") Metodo d mm veromglnz (cenn) Mmum kelhood In un proceo d mur (con mure rpetl ed ndpendent) ono tte ftte mure dfferent,,, 3,. S m l vlore vero (non noto) dell oervle e P(m) l dtruzone d proltà egut d dt
Metodo d mm veromglnz (cenn) Mmum kelhood In un proceo d mur (con mure rpetl ed ndpendent) ono tte ftte mure dfferent,,, 3,. S m l vlore vero (non noto) dell oervle e P(m) l dtruzone d proltà egut d dt
VERSO L ESAME DI STATO LA DERIVATA DI UNA FUNZIONE
 VERSO L ESAME DI STATO LA DERIVATA DI UNA FUNZIONE Soluzioni di quesiti e prolemi trtti dl Corso Bse Blu di Mtemti volume 5 [] (Es. n. 8 pg. 9 V) Dell prol f ( ) si hnno le seguenti informzioni, tutte
VERSO L ESAME DI STATO LA DERIVATA DI UNA FUNZIONE Soluzioni di quesiti e prolemi trtti dl Corso Bse Blu di Mtemti volume 5 [] (Es. n. 8 pg. 9 V) Dell prol f ( ) si hnno le seguenti informzioni, tutte
TRASFORMAZIONI GEOMETRICHE
 TRASFORMAZIONI GEOMETRICHE ) Spegre perhé relone he segue rppresent un trsformone geometr e determnre l trsformt dell rett L relone ndt osttuse un orrsponden unvo de punt del pno n sé stesso e qund è un
TRASFORMAZIONI GEOMETRICHE ) Spegre perhé relone he segue rppresent un trsformone geometr e determnre l trsformt dell rett L relone ndt osttuse un orrsponden unvo de punt del pno n sé stesso e qund è un
Verifica per la classe seconda COGNOME... NOME... Classe... Data...
 L rett Cpitolo Rett erifi per l lsse seon COGNOME............................... NOME............................. Clsse.................................... Dt............................... Rett Rette
L rett Cpitolo Rett erifi per l lsse seon COGNOME............................... NOME............................. Clsse.................................... Dt............................... Rett Rette
MEDIANA. 1. Numero di termini dispari (s dispari) VARIABILE STATISTICA N.B. Le frequenze della distribuzione devono essere cumulate
 VARIABILE STATISTICA N.B. Le frequenze della distribuzione devono essere cumulate") MEDIANA SUCCESSIONE N.B. I termn della ucceone devono eere pot n ordne non decrecente 1. Numero d termn dpar ( dpar) Me x + 1. Numero d termn par ( par) Me x + x + 1 VARIABILE STATISTICA N.B. Le frequenze
MEDIANA SUCCESSIONE N.B. I termn della ucceone devono eere pot n ordne non decrecente 1. Numero d termn dpar ( dpar) Me x + 1. Numero d termn par ( par) Me x + x + 1 VARIABILE STATISTICA N.B. Le frequenze
Analisi Parametrica della Stabilità
 Prof. Crlo Coetio Fodmeti di Automtic A.A. 6/7 Coro di Fodmeti di Automtic A.A. 6/7 Alii Prmetric dell Stbilità Prof. Crlo Coetio Diprtimeto di Medici Sperimetle e Cliic Uiverità degli Studi Mg Greci di
Prof. Crlo Coetio Fodmeti di Automtic A.A. 6/7 Coro di Fodmeti di Automtic A.A. 6/7 Alii Prmetric dell Stbilità Prof. Crlo Coetio Diprtimeto di Medici Sperimetle e Cliic Uiverità degli Studi Mg Greci di
Fisica II - Ing. Marittima e Sicurezza, prof. Schiavi A.A Foglio di Esercizi n. 1
 Fisic II - Ing. Mrittim e Sicurezz, prof. Schivi A.A. 2003-2004 Foglio i Esercizi n. 1 1.1. (**) Un cric elettrosttic è istribuit uniformemente, con ensità linere, su un semirett che gice sull sse i un
Fisic II - Ing. Mrittim e Sicurezz, prof. Schivi A.A. 2003-2004 Foglio i Esercizi n. 1 1.1. (**) Un cric elettrosttic è istribuit uniformemente, con ensità linere, su un semirett che gice sull sse i un
Analisi Matematica Lezione 26, 25 novembre 2014 Integrale di Riemann
 Dprtmento d Scenze Sttstche Anls Mtemtc Lezone 26, 25 novembre 2014 Integrle d Remnn prof. Dnele Rtell dnele.rtell@unbo.t 1/28? Teorem du Bos-Reymond e Drboux Condzone necessr e suffcente ffnché f R ([,
Dprtmento d Scenze Sttstche Anls Mtemtc Lezone 26, 25 novembre 2014 Integrle d Remnn prof. Dnele Rtell dnele.rtell@unbo.t 1/28? Teorem du Bos-Reymond e Drboux Condzone necessr e suffcente ffnché f R ([,
Test diagnostici. Un po di definizioni: test: (a+c)) / n. a+c. Malattia NO. a+b TEST. c+d. n= a+b+c+d. b+d POS NEG TOT TOT
) / n. a+c. Malattia NO. a+b TEST. c+d. n= a+b+c+d. b+d POS NEG TOT TOT") Test ignostii Un po i efinizioni: proilità pre-test test: (+)) / n POS SI Mltti NO + TEST NEG + + + n= +++ 1 sensiilità el test: / (+( +) proilità he, t l mltti M, il test T si positivo SI Mltti NO POS
Test ignostii Un po i efinizioni: proilità pre-test test: (+)) / n POS SI Mltti NO + TEST NEG + + + n= +++ 1 sensiilità el test: / (+( +) proilità he, t l mltti M, il test T si positivo SI Mltti NO POS
Università della Calabria
 Unverstà dell Clbr FACOLTA DI IGEGERIA Corso d Lure n Ingegner Cvle CORSO DI IDROLOGIA.O. Prof. Psqule Versce Y 6 ( 6, 6 (, e e 6 6 f( 6 (, e SCHEDA DIDATTICA 6 REGRESSIOE E CORRELAZIOE A.A. - REGRESSIOE
Unverstà dell Clbr FACOLTA DI IGEGERIA Corso d Lure n Ingegner Cvle CORSO DI IDROLOGIA.O. Prof. Psqule Versce Y 6 ( 6, 6 (, e e 6 6 f( 6 (, e SCHEDA DIDATTICA 6 REGRESSIOE E CORRELAZIOE A.A. - REGRESSIOE
Sviluppo curato da: Francesca Caporale e Lia Di Florio Docente: prof. Quintino d Annibale a.s. 2003/2004
 Meccnc Legge d Newton e prncp d conervzone Lceo Scentco Tecnologco ESECZO TATTO DAL COMPTO FNALE DEL ANNO Svluppo curto d: Frncec Cporle e L D Floro cle LST A Docente: pro. Quntno d Annble.. /4 Teto Un
Meccnc Legge d Newton e prncp d conervzone Lceo Scentco Tecnologco ESECZO TATTO DAL COMPTO FNALE DEL ANNO Svluppo curto d: Frncec Cporle e L D Floro cle LST A Docente: pro. Quntno d Annble.. /4 Teto Un
Es1 Es2 Es3 Es4 Es5 tot
 Ottore lsse E Verifi sommtiv Cognome Nome rgomenti: onihe, funzione esponenzile e grfii derivti Tempo disposizione: ore Voto Es Es Es Es Es tot.... Considert l ellisse vente ome sse fole l sse, eentriità
Ottore lsse E Verifi sommtiv Cognome Nome rgomenti: onihe, funzione esponenzile e grfii derivti Tempo disposizione: ore Voto Es Es Es Es Es tot.... Considert l ellisse vente ome sse fole l sse, eentriità
(figura - 3.0a) (figura - 3.0b) TH TH AB L AB L TH
 (figura - 3.0b) TH TH AB L AB L TH") ESEZO.0: egnto l crcuto d fgur.0, relzzto trmte l collegmento d pol lner, determn l equvlente d Thévenn del polo d morett e pendo che con l retenz L 45 W, conne morett, mur 90, mentre con L non conne mur
ESEZO.0: egnto l crcuto d fgur.0, relzzto trmte l collegmento d pol lner, determn l equvlente d Thévenn del polo d morett e pendo che con l retenz L 45 W, conne morett, mur 90, mentre con L non conne mur
Amplificatori operazionali
 mplfcator operazonal Parte www.e.ng.unbo.t/pers/mastr/attca.htm (ersone el 9-5-0) mplfcatore operazonale L amplfcatore operazonale è un sposto, normalmente realzzato come crcuto ntegrato, otato tre termnal
mplfcator operazonal Parte www.e.ng.unbo.t/pers/mastr/attca.htm (ersone el 9-5-0) mplfcatore operazonale L amplfcatore operazonale è un sposto, normalmente realzzato come crcuto ntegrato, otato tre termnal
A.A.2009/10 Fisica 1 1
 Mhine termihe e frigoriferi Un mhin termi è un mhin he, grzie un sequenz i trsformzioni termoinmihe i un t sostnz, proue lvoro he può essere utilizzto. Un mhin solitmente lvor su i un ilo i trsformzioni
Mhine termihe e frigoriferi Un mhin termi è un mhin he, grzie un sequenz i trsformzioni termoinmihe i un t sostnz, proue lvoro he può essere utilizzto. Un mhin solitmente lvor su i un ilo i trsformzioni
Ellisse ed iperbole. Osservazione. Considereremo sempre ellissi della forma + = 1 le quali hanno tutte centro nell origine degli
 Ellisse ed iperole Ellisse Definizione: si definise ellisse il luogo geometrio dei punti del pino per i quli è ostnte l somm delle distnze d due punti fissi F e F detti fuohi. L equzione noni dell ellisse
Ellisse ed iperole Ellisse Definizione: si definise ellisse il luogo geometrio dei punti del pino per i quli è ostnte l somm delle distnze d due punti fissi F e F detti fuohi. L equzione noni dell ellisse
Noi investiamo in qualità della vita e Tu?
 No nvestmo n qultà dell vt e Tu? sosttuzone de serrment SI NO - RISPARMIO IN BOLLETTA - COMFORT - QUALITÀ DELLA VITA + - lvor d rqulfczone lvor d rqulfczone + eff cen 10 nn relzzzone del cppotto z e nerg
No nvestmo n qultà dell vt e Tu? sosttuzone de serrment SI NO - RISPARMIO IN BOLLETTA - COMFORT - QUALITÀ DELLA VITA + - lvor d rqulfczone lvor d rqulfczone + eff cen 10 nn relzzzone del cppotto z e nerg
Lezione 7: Rette e piani nello spazio
 Lezione 7: Rette e pini nello spzio In quest lezione i metteremo in un riferimento rtesino ortonormle dello spzio. I primi oggetti geometrii he individuimo sono le rette e i pini. Per qunto rigurd le rette
Lezione 7: Rette e pini nello spzio In quest lezione i metteremo in un riferimento rtesino ortonormle dello spzio. I primi oggetti geometrii he individuimo sono le rette e i pini. Per qunto rigurd le rette
1 Curve, superfici, sottovarietà.
 Complementi ed Esercizi di Geometri Differenzile - A. Smbusetti 1 1 Curve, superfici, sottovrietà. Definizioni 1.1 (Intorni, insiemi perti, domini) Si S un sottoinsieme di R n : un intorno rettngolre perto
Complementi ed Esercizi di Geometri Differenzile - A. Smbusetti 1 1 Curve, superfici, sottovrietà. Definizioni 1.1 (Intorni, insiemi perti, domini) Si S un sottoinsieme di R n : un intorno rettngolre perto
UNIVERSITÀ DEGLI STUDI DI BERGAMO. Facoltà di Ingegneria. Istituzioni di Economia Laurea Triennale in Ingegneria Gestionale
 Gnmr Mrtn UNIVERSITÀ DEGLI STUDI DI BERGAMO Fcoltà d Ingegner Isttuzon d Econom Lure Trennle n Ingegner Gestonle Lezone 9 Domnd del mercto Prof. Gnmr Mrtn Unverstà degl Stud d Bergmo Fcoltà d Ingegner
Gnmr Mrtn UNIVERSITÀ DEGLI STUDI DI BERGAMO Fcoltà d Ingegner Isttuzon d Econom Lure Trennle n Ingegner Gestonle Lezone 9 Domnd del mercto Prof. Gnmr Mrtn Unverstà degl Stud d Bergmo Fcoltà d Ingegner
Geometria analitica +l piano cartesiano Le funzioni retta, parabola, iperbole Le trasformazioni sul piano cartesiano
 Geometri nliti +l pino rtesino Le funzioni rett, prol, iperole Le trsformzioni sul pino rtesino SEZ. P +l pino rtesino Osserv le oorinte ei seguenti punti: (, 0), (, ), C(, +), D + +, E(+, 9)., Che os
Geometri nliti +l pino rtesino Le funzioni rett, prol, iperole Le trsformzioni sul pino rtesino SEZ. P +l pino rtesino Osserv le oorinte ei seguenti punti: (, 0), (, ), C(, +), D + +, E(+, 9)., Che os

Calcolo del Throughput del TCP
 Calcolo del Throughput del TCP Modello Perodco Legge dell nverso della p Obettvo: determnare l throughput X(t) n termn d bt/s d una sorgente che mpega l TCP per trasmettere suo dat ad un destnataro. Sano
Calcolo del Throughput del TCP Modello Perodco Legge dell nverso della p Obettvo: determnare l throughput X(t) n termn d bt/s d una sorgente che mpega l TCP per trasmettere suo dat ad un destnataro. Sano
( ) 1. Scrivi l equazione della parabola ad asse verticale passante per il punto ( ) P e con vertice. Soluzione Dall equazione generica della parabola
 1. Scrivi l equazione della parabola ad asse verticale passante per il punto ( ) P e con vertice. Soluzione Dall equazione generica della parabola") . Srivi l euzione dell prol d sse vertile pssnte per il punto ( ) ; P e on vertie ( ) ; V. Dll euzione generi dell prol e dll onosenze del vertie, le ui oordinte generihe sono V ; possimo srivere sostituendo
. Srivi l euzione dell prol d sse vertile pssnte per il punto ( ) ; P e on vertie ( ) ; V. Dll euzione generi dell prol e dll onosenze del vertie, le ui oordinte generihe sono V ; possimo srivere sostituendo
Unità Didattica N 08 I sistemi di primo grado a due incognite U.D. N 08 I sistemi di primo grado a due incognite
 66 Unità idtti N 08 I sistemi di primo grdo due inognite U.. N 08 I sistemi di primo grdo due inognite 01) Coordinte rtesine 0) I sistemi di primo grdo due inognite 0) Metodo di sostituzione 04) Metodo
66 Unità idtti N 08 I sistemi di primo grdo due inognite U.. N 08 I sistemi di primo grdo due inognite 01) Coordinte rtesine 0) I sistemi di primo grdo due inognite 0) Metodo di sostituzione 04) Metodo
Sia data una macchina rotante isotropa, dotata di un solo avvolgimento rotorico.
 ommrio. FAORI PAZIALI... 1.1 I FAORI PAZIALI ED IL GIUTO ELETTROMAGETICO... 1. Fori pzili.1 I fori pzili ed il giunto elettromgnetico i dt un mcchin rotnte iotrop, dott di un olo vvolgimento rotorico.
ommrio. FAORI PAZIALI... 1.1 I FAORI PAZIALI ED IL GIUTO ELETTROMAGETICO... 1. Fori pzili.1 I fori pzili ed il giunto elettromgnetico i dt un mcchin rotnte iotrop, dott di un olo vvolgimento rotorico.
Algebra. c d. 1. Operazioni con le potenze. 2. Operazioni con le frazioni. 3. Identità notevoli. (somma algebrica tra frazioni)
") ler. Oerzioi o le oteze m m m m : m / m m m, m / m. Oerzioi o le rzioi d d somm leri tr rzioi d rodotto tr rzioi d d d : rorto tr rzioi d otez di u rzioe 3. Idetità otevoli. 3 3, 3 3 3, 3 3 3 3,, 4 4 3
ler. Oerzioi o le oteze m m m m : m / m m m, m / m. Oerzioi o le rzioi d d somm leri tr rzioi d rodotto tr rzioi d d d : rorto tr rzioi d otez di u rzioe 3. Idetità otevoli. 3 3, 3 3 3, 3 3 3 3,, 4 4 3
Superfici di Riferimento (1/4)
") Superfici di Riferimento (1/4) L definizione di un superficie di riferimento nsce dll necessità di vere un supporto mtemtico su cui sviluppre il rilievo eseguito sull superficie terrestre. Tle superficie
Superfici di Riferimento (1/4) L definizione di un superficie di riferimento nsce dll necessità di vere un supporto mtemtico su cui sviluppre il rilievo eseguito sull superficie terrestre. Tle superficie
Le equazioni di secondo grado. Appunti delle lezioni di Armando Pisani A.S Liceo Classico Dante Alighieri (GO)
") Le equzioni di seondo grdo Appunti delle lezioni di Armndo Pisni A.S. 3- Lieo Clssio Dnte Alighieri (GO) Not Questi ppunti sono d intendere ome guid llo studio e ome rissunto di qunto illustrto durnte
Le equzioni di seondo grdo Appunti delle lezioni di Armndo Pisni A.S. 3- Lieo Clssio Dnte Alighieri (GO) Not Questi ppunti sono d intendere ome guid llo studio e ome rissunto di qunto illustrto durnte
Sistemi a Radiofrequenza II. Guide Monomodali
 Eserizio. Ordinre le frequenze di tglio dei modi di un guid rettngolre on b, qundo: b / < b < b / Soluzione: L ostnte riti è ugule per modi TE e TM: K Frequenz Criti: f K V f m V n f π b Tglio dei modi:
Eserizio. Ordinre le frequenze di tglio dei modi di un guid rettngolre on b, qundo: b / < b < b / Soluzione: L ostnte riti è ugule per modi TE e TM: K Frequenz Criti: f K V f m V n f π b Tglio dei modi: