Report di ricerca D3.5
|
|
|
- Davide Abate
- 8 anni fa
- Visualizzazioni
Transcript
1 Report di ricerca D3.5 Relazione su scenari, modelli implementativi e specifiche architetturali/funzionali di soluzioni di image processing ed information processing per la generazione massiva di punti di interesse georeferenziati nei parchi impliciti (smartspotting) Il presente documento costituisce il report di ricerca D3.5 previsto nel progetto NeoLuoghi nel task T3.3 L esperienza fruitiva: interazione sociale ed emozionale, Fruizione continua e diffusa: Smartspotting.
 Il presente documento costituisce il report di ricerca D3.")
2 Indice generale 1 Introduzione Struttura del documento

3 1 Introduzione Il modello di fruizione del NeoLuogo analizzato nel progetto di ricerca è quello in cui: Il sistema tematico viene letto come un continuum ricco di continue opportunità fruitive, che calzano con il ritmo emozionale dell esperienza immersiva e metalettica; Le esigenze e i comportamenti degli utenti sono profilati intelligentemente sulla base delle informazioni preesistenti e del monitoraggio dei comportamenti fruitivi, e consentono l erogazione di contenuti dinamici e l indirizzamento degli utenti secondo modelli narrativi appositamente ottimizzati; I contenuti sono leggeri, non necessariamente predeterminati, finemente contestualizzati e modulati in modo naturale e coinvolgente in funzione dell esperienza fruitiva; Il triggering dell erogazione avviene secondo metafore naturali e visuali, ad esempio di realtà aumentata, per cui si ha coerenza e contestualità tra vedere e comprendere, senza che vi sia la necessità di alternare il registro esperienziale con quello della fruizione passiva di un commento; La fruizione avviene in un contesto di scambio e di interazione sociale, collaborativa e competitiva, in cui ogni protagonista è un nodo di un organismo peer-to-peer che vive esperienze condivise, e nel condividerle le plasma e le finalizza; Questo modello ha come punto di partenza le metodologie per la generazione, normalizzazione, standardizzazione e restituzione di specifiche informazioni georeferenziate (Punti di Interesse o Point of Interest 1 ) contenute all interno di un contesto geografico 2 definito. Infatti la ricerca ha evidenziato che uno degli aspetti abilitanti nella creazione di NeoLuoghi esperienziali è la strutturazione delle esperienze di scoperta e fruizione del sistema tematizzato nella forma di una fitta trama di segni e punti di interesse di un continuum (che trova corrispondenza in una pari continuità emozionale) di evidenze ottenuto attraverso un lavoro di granularizzazione e pervasività. La metodologia di riferimento prevista per la creazione dei punti di interesse si basava sulle seguenti ipotesi di lavoro: Si acquisiscono corpora di informazione destrutturata sulla città, la sua storia, eventi e personaggi; Un motore di ricerca semantica analizza i testi ed estrae informazioni utili al processo di hotspotting, creando un repository annotato mediante tags descrittivi e semantici, Ulteriormente arricchibile mediante processi di editing ed annotazione eseguiti manualmente; Le unità di contenuto individuate nei corpora vengono separate tra quelle dotate di riferimenti (nomi di strade, vicino a..., legato al monumento..., etc.) che possono essere incrociati con una mappa street level acquisita per via fotografica e successive elaborazioni, e quelle con una annotazione debole, che richiede un intervento manuale di georeferenziazione e contestualizzazione; 1 Di seguito useremo anche l acronimo POI 2 La definizione di contesto geografico vuole essere generica ed è necessariamente associata all idea di luogo o area sulla superficie terreste univocamente identificata da coordinate geografiche. 3

4 Vengono realizzate riprese aeree a bassa quota (appositamente orto rettificate) e riprese street level al suolo, e i due layers vengono fatti combaciare attraverso tecniche di image recognition e di ottimizzazione dei match tra le coordinate spaziali; Il sistema, assistito dal motore di ricerca semantica, associa a ogni luogo (automaticamente nel primo caso, manualmente nel secondo) le informazioni topografiche e i contlet contenutistici pertinenti; Il sistema associa a ogni hot spot le informazioni complementari eventualmente esistenti (ad esempio, foto a terra, ricostruzioni di realtà aumentata) e le "calza" in modo che si sovrappongano; A questo punto si inserisce il sistema di storytelling (vedi oltre) che (off-line) aiuta gli autori a produrre storie tematiche legate a singoli hotspots e a loro sequenze, e (online) propone segmenti narrativi agli utenti seguendo dinamicamente i loro spostamenti nell'area tematizzata. Appare opportuno fin d ora evidenziare che tale metodologia è apparsa subito lacunosa relativamente alla mancata ipotesi di acquisizione di point of interest attraverso l interfacciamento diretto a banche dati strutturate o semi-strutturate che contengono informazioni già georeferenziate e validate. Questa modalità di creazione di point of interest è di assoluta importanza tenuto conto delle presenza di numerose banche dati di questo tipo e della evoluzione tecnologica per potersi interfacciare con queste sia in maniera sincrona che in maniera asincrona. 4
 e le \"calza\" in modo che si sovrappongano; A questo punto si inserisce il sistema di storytelling (vedi oltre) che (off-line) aiuta gli autori a produrre storie tematiche legate a")
5 2 Struttura del documento Il documento è strutturato nei seguenti technical report (TR): TR Analisi dello stato dell arte sulle metodologie di georeferenziazione delle informazioni. Descrive i principali sistemi di riferimento geografico in uso e le principali metodologie e tecnologie di associazione di informazioni ad un luogo geografico (geocoding, reverse geocoding, geotagging, etc.). TR Analisi dello stato dell'arte sulle tecniche di image processing ed in particolare sulle tecniche di ripresa aerea. Descrive principi, concetti fondamentali e stato dell arte delle tecniche di telerilevamento, concentrandosi principalmente sulle tecnologie aviotrasportabili e terrestri, e le tecniche di image processing ed analisi dei dati telerilevati per la produzione di informazioni. Infine è analizzato l utilizzo delle informazioni prodotte dai Geographic Information System per l analisi e la conoscenza del territorio. TR Analisi dello stato dell'arte sulle tecniche di modellazione dei POI e definizione di un modello di POI. Analizza i modelli esistenti di POI e le semantiche utilizzate per la loro classificazione e definisce un modello di POI conforme alle specifiche del progetto di ricerca. Descrive il diagramma Entità-Relazioni relativo alla progettazione logica di una banca dati conforme al modello di POI individuato nel technical report TR Analisi dello stato dell'arte sulle tecniche di modellazione dei POI e definizione di un modello di POI. Riporta anche gli script SQL da utilizzare per la sua creazione. TR Analisi dello stato dell arte sulle tecniche di information processing per la ricerca di informazioni georeferenziate e metodologie utilizzate per la estrazione dei POI. Analizza lo stato dell arte dell information processing con specifica attenzione alle metodologie e modelli di geographic information retrieval e definisce una metodologia per l estrazione di POI da banche dati non strutturate, semi-strutturate e strutturate. TR Analisi dello stato dell'arte sulle banche dati da utilizzare come information source per la generazione di POI. Analizza le principali banche dati, strutturate, semi-strutturate e non strutturate, che possono essere utilizzate come source information per la generazione dei POI. TR Smartspotting: Analisi dei requisiti e funzionalità. Analizza i requisiti funzionali e non funzionali del componente smartspotting e descrive le sue funzionalità. TR Smartspotting: Architettura applicativa. Descrive l architettura applicativa del componente smartspotting che soddisfa i requisiti individuati nel technical report TR Analisi dei requisiti. Descrive il diagramma Entità-Relazioni relativo alla progettazione logica della banca dati del componente smartspotting e riporta gli script SQL da utilizzare per la sua creazione. 5

6 Technical Report TR D3.5.1 Analisi dello stato dell'arte sulle metodologie di georeferenziazione delle informazioni Il presente documento costituisce il technical report TR D3.5.1 previsto nel report di ricerca D3.5 Relazione su scenari, modelli implementativi e specifiche architetturali/funzionali di soluzioni di image processing ed information processing per la generazione massiva di punti di interesse georeferenziati nei parchi impliciti (smartspotting) del progetto NeoLuoghi.

7 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Indice generale 1 Introduzione Sistemi di riferimento geografici Superfici di riferimento e datum Proiezioni geografiche o cartografiche Proiezione di Mercatore Proiezione di Gauss Sistemi di coordinate geografiche Latitudine e longitudine Universal Transverse Mercator (UTM)...18 Gauss-Boaga Cassini-Soldner Sistemi di coordinate in uso Tecnologie Sistemi di posizionamento globale Sistemi di posizionamento globale in funzione NAVSTAR GPS Segmento spaziale Segmento di controllo Segmento di utilizzo Principio di funzionamento GLONASS Sistemi di posizionamento globale in fase di attivazione Galileo IRNSS Beidou Geocoding Reverse geocoding Geotagging Geoparsing Toponimi e servizi di Gazetteer Sistema catastale italiano Acronimi Bibliografia

8 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figure Figura 1: Sistema di coordinate... 5 Figura 2: Latitudine e longitudine... 5 Figura 3: Ellissoide di rotazione... 6 Figura 4: Ellisoide, geoide e superficie topografica... 7 Figura 5: Ellisoide, geoide e superficie fisica...8 Figura 6: Datum... 9 Figura 7: Proiezioni azimutali Figura 8: Proiezioni cilindriche Figura 9: Proiezioni coniche Figura 10: Proiezione di Mercatore Figura 11: Proiezione di cilindrica inversa Figura 12: Proiezione di cilindrica inversa Figura 13: Proiezione di Gauss Figura 14: Latitudine e longitudine Figura 15: Suddivisione globo UTM Figura 16: Suddivisione Italia UTM Figura 17: Suddivisione Italia Gauss-Boaga Figura 18: Mappa catastale Figura 19: Triangolazione satellitare Figura 20: Ricerca toponimi Regione Sardegna Figura 21: Risultati ricerca toponimi Regione Sardegna Figura 22: Visualizzazione toponimi Regione Sardegna Figura 23: Visualizzazione coordinate catastali

9 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 1 Introduzione Il termite georeferenziazione è definito nella Enciclopedia Treccani come Tecnica di attribuzione di coordinate geografiche a un oggetto grafico, usata nelle procedure di cartografia computerizzata e nella costruzione di basi cartografiche digitali. Il termine è stato comunemente usato nel campo dei sistemi informativi geografici1 per descrivere il processo di associare ad una carta fisica, o immagine raster di una carta, le posizioni geografiche, tuttavia questa definizione appare oggi decisamente limitata e deve essere estesa e generalizzata prescindendo da sistemi digitali e computerizzati. Una definizione più appropriata appare essere Tecnica di associare un oggetto o una informazione ad una posizione geografica sulla superficie terrestre. La georeferenziazione può essere applicata a qualsiasi tipo di oggetto o struttura o informazione che può essere correlata ad una posizione geografica, come i punti di interesse, strade, luoghi, ponti o edifici. Una posizione geografica sulla superficie terrestre è comunemente rappresentata utilizzando un sistema di riferimento geografico che a sua volta può essere connesso ad un sistema geodetico di riferimento come ROMA40 o WGS84. Esempi di georeferenziazione possono essere stabilire la corretta posizione di una fotografia aerea all'interno di una carta o trovare le coordinate geografiche di luogo o di indirizzo (geocoding). Nel seguito del documento è riportato: 1 Lo stato dell arte dei differenti sistemi di riferimento geografici oggi utilizzati nel mondo; Lo stato dell arte delle tecnologie utilizzate per individuare in maniera universale e con precisione una posizione geografica sulla superficie terrestre in un dato sistema di riferimento geografico. Geographic Information System o GIS 4

10 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 2 Sistemi di riferimento geografici Un sistema di coordinate bidimensionale è definito rispetto a un piano, un sistema di coordinate tridimensionale è definito rispetto a due piani ortogonali, i sistemi di riferimento geografici o sistemi di coordinate geografiche estendono l idea del sistema cartesiano alla superficie curva della Terra. Figura 1: Sistema di coordinate Le coordinate geografiche sono spesso scelte in modo tale che uno dei numeri rappresenta la posizione verticale e due o tre numeri rappresentano la posizione orizzontale. Una scelta comune di coordinate geografiche è la latitudine, longitudine e altitudine. Figura 2: Latitudine e longitudine La definizione e la realizzazione di sistemi di riferimento geografici appropriati per determinare la posizione di un oggetto o di una informazione sulla superficie della terra sono da sempre considerati un problema fondamentale della scienza della geodesia cui spetta, tra gli altri, la determinazione delle dimensioni e della forma della Terra. La Terra somiglia molto ad una sfera, ma in realtà non lo è: considerarla tale è un'approssimazione che può essere utile in certi casi, ma troppo grossolana per la maggior parte delle applicazioni. La superficie fisica della Terra è invece molto vicina a quella di un ellissoide di rotazione, cioè un ellissoide biassiale, di forma e dimensioni assegnate attraverso due parametri, e di posizione spaziale definita attraverso sei parametri. 5

11 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 3: Ellissoide di rotazione Un ellissoide di rotazione riesce a fornire soltanto una approssimazione, sia pur buona, della forma che assumerebbe la Terra se il livello medio del mare si estendesse anche là dove si trovano le terre emerse, colmando le eventuali depressioni ed eliminando tutti i rilievi. In effetti la Terra non è omogenea, e la presenza di materia di densità diversa provoca una leggera distorsione del campo gravitazionale, sia per quello che riguarda la direzione che l'intensità Superfici di riferimento e datum La superficie ellissoidica è regolare e facilmente trattabile dal punto di vista matematico e proprio per questo è diffusamente usata come superficie di riferimento per le coordinate planimetriche. Invece l'ellissoide è molto meno sfruttabile come superficie di riferimento per le coordinate altimetriche in quanto priva di significato fisico e al suo posto è utilizzato il geoide, definito come superficie equipotenziale nel campo della gravità che meglio approssima il livello medio del mare, anche se non coincidente con esso. La superficie del geoide si discosta di pochi metri da quella dell'ellissoide. In generale si nota che in corrispondenza di fosse oceaniche il geoide si trova al di sotto dell'ellissoide, e coincide con il livello medio del mare; in corrispondenza di catene montuose il geoide si situa al di sopra dell'ellissoide. 6

12 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 4: Ellisoide, geoide e superficie topografica Una superficie di riferimento deve avere due caratteristiche: essere matematicamente trattabile; essere fisicamente individuabile con facilità. La seconda caratteristica è facilmente riscontrabile nelle superfici equipotenziali del campo della gravità, almeno per quanto riguarda il loro orientamento locale, essendo in ogni punto ortogonali alla direzione del filo a piombo; il geoide, che è una di queste superfici, non possiede però la prima caratteristica, che invece è propria dell'ellissoide biassiale. La posizione geografica di un punto sulla Terra può dunque essere definita come la sua posizione relativa ad una superficie di riferimento utilizzata in sostituzione della reale forma della Terra. Le superfici di riferimento più spesso utilizzate sono la sfera, l'ellissoide biassiale ed il geoide (superficie equipotenziale del campo gravitazionale della Terra). Le prime due hanno una definizione puramente geometrica e sono alternative, la terza ha una definizione fisica ed è associata alle altre per la determinazione più utilizzata delle quote. Essendo una superficie equipotenziale, il geoide è per definizione una superficie alla quale la forza di gravità è ovunque perpendicolare. Ciò significa che, quando si viaggia in nave, uno non nota le ondulazioni del geoide; la verticale locale (filo a piombo) è sempre perpendicolare al geoide e l'orizzonte locale tangenziale ad esso. 7

13 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 5: Ellisoide, geoide e superficie fisica È consuetudine corretta e necessaria distinguere tra coordinate sferiche, ellissoidiche e geoidiche, a secondo che siano utilizzate rispettivamente la sfera, l'ellissoide o il geoide come superfici di riferimento. La definizione di superfici di riferimento uniche per tutta la Terra, oggi indispensabile per l'utilizzo delle metodologie satellitari, è stata in passato di scarso interesse e di difficile realizzazione, a causa del carattere essenzialmente locale delle tecniche classiche di rilievo geodetico e topografico. Per questo motivo oggi esistono nel mondo molti sistemi geodetici locali definiti storicamente con l'intento di ottenere una buona approssimazione unicamente nelle aree di interesse. Considerando, come si è già detto, che il problema della determinazione dei punti è stato tradizionalmente affrontato, dalla geodesia classica, scindendo nettamente la parte altimetrica da quella planimetrica, troviamo normalmente due superfici di riferimento definite in maniera diversa in ogni nazione: un geoide e un ellissoide locali. Un datum è un sistema geodetico di riferimento che consente di definire in termini matematici la posizione di punti sulla superficie della Terra. Il datum consente quindi l'operazione di georeferenziazione di luoghi o oggetti. Non essendo la Terra uno sferoide perfetto, il datum di riferimento non può essere univoco. In altre parole, il datum è un parametro di trasformazione definito da due aspetti: l ellissoide di riferimento scelto per approssimare la dimensione e la forma della Terra; l orientamento dell ellissoide, ossia il suo posizionamento rispetto alla superficie terrestre reale. Dal punto di vista matematico, un ellissoide di riferimento è usualmente uno sferoide oblato descritto dalla formula: Dove: a = semiasse maggiore (o raggio equatoriale) c = semiasse minore (o raggio polare) a>c Questa superficie va quindi collegata in modo univoco alla superficie reale della Terra con una operazione che viene detta di orientamento. L'orientamento può essere di due tipi: orientamento locale: usato per superfici limitate (tipicamente a livello nazionale). Il collegamento fra la superficie di riferimento e la superficie della terra è limitato ad un solo punto; orientamento medio: usato per aree più vaste (continenti). Il collegamento fra la superficie di riferimento e la superficie terrestre avviene in più punti. Possono pertanto distinguersi due specie di datum: 8

, che sono orientati al centro della Terra e sono utilizzati per")
14 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità datum locali (o datum con orientamento locale), che accostano l ellissoide di riferimento alla superficie terrestre in un punto particolare per migliorare localmente l accuratezza del modello; datum globali (o datum con orientamento medio), che sono orientati al centro della Terra e sono utilizzati per funzionare globalmente. datum globale datum locale geoide Figura 6: Datum Esempi di datum: datum locali, che si accostano alla superficie terrestre in un punto particolare: European Datum 1950 (ED50) usa l ellissoide internazionale 1924 (Hayford), è orientato a Postdam (Germania) ed è stato creato per l uso in Europa. E il datum utilizzato nella produzione cartografica recente dell Istituto Geografico Militare; Roma 1940 (Roma40) usa l ellissoide internazionale di Hayford ed è orientato a Monte Mario (Roma); è il datum utilizzato nella produzione cartografica dell Istituto Geografico Militare fino alla fine degli anni 80. E ancora in uso nella Cartografia Tecnica Regionale. European Terrestrial Reference System 1989 (ETRS89) è un sistema di riferimento cartesiano geodetico di tipo geocentrico. In Europa, le coordinate e le mappe basate sull'etrs89 non sono soggette al cambiamento causato della deriva continentale. È il datum ufficiale adottato in Europa; American Datum North (NAD) è il datum oggi utilizzato per definire la rete geodetica in Nord America. E presente in due varianti North American Datum del 1927 (NAD27) e il North American Datum del 1983 (NAD83); 9
 usa l ellissoide")
15 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità datum globali, che sono orientati al centro della Terra e sono utilizzati per funzionare globalmente: World Geodetic System 84 (WGS84) usa un proprio ellissoide (WGS84); è usato dalla rete di rilevamento satellitare GPS. 10
; è usato dalla rete di rilevamento satellitare")
16 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 3 Proiezioni geografiche o cartografiche Al fine di rappresentare la superficie terrestre curva della Terra su di un piano, ovvero una carta geografica o mappa, riducendo al minimo le deformazioni, i cartografi hanno dovuto ricorrere a una particolare tecnica, nota col nome di proiezione geografica. Un metodo di proiezione è una funzione matematica che mette in corrispondenza biunivoca un sistema di coordinate sferiche (o sferoidali) con un sistema di coordinate planari. Un metodo di proiezione è dunque un insieme di regole (trasformazioni geometriche, matematiche o empiriche) per restituire lo spazio tridimensionale della superficie terrestre su un piano bidimensionale. Si tratta quindi di una trasformazione matematica che a partire dalle coordinate geografiche φ (latitudine) e λ (longitudine), calcola le coordinate cartografiche x e y sul piano. Si possono definire anche le formule inverse che permettono di calcolare φ e λ se sono note x e y. In termini geometrici lo sferoide terrestre (ellissoide) è una forma non sviluppabile: vale a dire che comunque la superficie dello sferoide sia divisa, non può essere distesa su un piano. In altre parole non è possibile spianare una superficie sferica o, più in generale curva, senza deformarla, cioè senza apportare compressioni ed espansioni ad alcune, se non a tutte, delle sue parti ovvero tutte le proiezioni sono affette da distorsioni. I metodi di proiezione sono pertanto distinti sulla base delle proprietà geometriche rispettate: ISOGONIA: uguaglianza di angoli compresi tra linee reali e linee rappresentate; EQUIDISTANZA: nella rappresentazione viene mantenuta la reale distanza (inalterato il rapporto tra lunghezze grafiche e reali); EQUIVALENZA: viene preservata l area (costante il rapporto tra aree grafiche e corrispondenti aree reali). Poiché nessuna proiezione è indenne da distorsioni (esempio una proiezione che conserva le aree non può conservare al tempo stesso gli angoli), quale tipo di distorsione possa essere tollerato, e quindi quale tecnica di proiezione debba essere scelta, dipende dallo scopo che si intende ottenere con la rappresentazione, rispetto ad alcuni parametri: proprietà della carta (esempio il mantenimento del parallelismo tra le deformate dei paralleli sul piano); estensione dell area da rappresentare; quantità ed estensione delle deformazioni ammissibili. In base alla conservazione di alcuni elementi si distinguono: Proiezioni conformi: lasciano inalterate le forme. Gli angoli restano invariati. Proiezioni equivalenti: le aree rimangono invariate, mentre le forme e gli angoli subiscono distorsione. Proiezioni equidistanti: lasciano inalterati gli elementi lineari in una direzione. 11
 per restituire lo spazio tridimensionale della superficie terrestre su un piano")
17 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Per produrre una carta sul piano, la rete fondamentale di meridiani e paralleli deve essere proiettata su una superficie sviluppabile sul piano. Le tre più comuni superfici sviluppabili sono il cilindro, il cono e, evidentemente, il piano (tangente o meno): Proiezioni azimutali: la proiezione viene effettuata su di un piano. E molto adatta per le proiezioni delle zone polari, in quanto i paralleli sono rappresentati come cerchi concentrici ed i meridiani come diametri della circonferenza. Figura 7: Proiezioni azimutali Proiezioni cilindriche: i meridiani ed i paralleli vengono proiettati lungo la superficie cilindrica ad angolo retto. I meridiani sono egualmente spaziati, mentre la distanza tra paralleli aumenta avvicinandosi ai poli. La proiezione cilindrica è conforme. Figura 8: Proiezioni cilindriche Le proiezioni cilindriche sono create disponendo un cilindro intorno al globo. Il cilindro è verticale nella proiezione cilindrica diretta ed è orizzontale nella proiezione cilindrica inversa. Il cilindro è tagliato lungo un meridiano (o un parallelo) e aperto per produrre un piano Proiezioni coniche: i meridiani sono proiettati lungo la superficie conica e si intersecano all apice del cono, mentre i paralleli sono proiettati come anelli. La distorsione aumenta lungo la latitudine. Utile per le zone a media latitudine. 12

18 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 9: Proiezioni coniche Esempi di proiezioni utilizzate sono: proiezione di Mercatore; proiezione di Gauss Proiezione di Mercatore La proiezione di Mercatore è una proiezione geografica conforme e cilindrica proposta nel 1569 dal geografo e cartografo fiammingo Gerard de Cremer noto come Gerardus Mercator (italianizzato in Gerardo Mercatore). La rappresentazione di Mercatore è uno sviluppo cilindrico diretto modificato da un procedimento misto geometrico-analitico che rende le carte isogoniche (angoli uguali nella rotta). Essa è diventata la proiezione geografica più usata per le mappe nautiche. Mentre la scala delle distanze è costante in ogni direzione attorno ad ogni punto, conservando allora gli angoli e le forme di piccoli oggetti (il che rende la proiezione conforme), la proiezione di Mercatore distorce sempre più la dimensione e le forme degli oggetti estesi passando dall'equatore ai poli, in corrispondenza dei quali la scala della mappa aumenta a valori infiniti (secondo un grigliato delle latitudini crescenti). Come ogni mappa di proiezione che tenta di rappresentare una superficie curva su un foglio piano, la forma della mappa è una distorsione della reale forma della superficie terrestre. La proiezione di Mercatore esagera le dimensioni delle aree lontane dall'equatore. Per esempio: la Groenlandia è rappresentata con un'area equivalente a quella dell'intero territorio dell'africa, quando in realtà l'area di questa è approssimativamente 14 volte quella della Groenlandia. 13
.")
19 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità l'alaska è rappresentata con un'area simile se non superiore a quella del Brasile, quando l'area del Brasile è in realtà più di 5 volte quella dell'alaska. la Finlandia è rappresentata avente un'estensione nord-sud più grande di quella dell'india, quando nella realtà è vero il contrario. Figura 10: Proiezione di Mercatore Google Maps attualmente usa una proiezione di Mercatore per le sue immagini. Infatti la proiezione di Mercatore si adatta bene per una mappa del mondo interattiva che può essere spostata e scalata senza cuciture di giunzione su mappe locali e la distorsione è impercettibile per piccole variazioni di latitudine Proiezione di Gauss La proiezione di Gauss (nota anche come proiezione inversa di Mercatore) è una proiezione conforme derivata dalla proiezione cilindrica inversa cioè l asse del cilindro è ortogonale all asse di rotazione terrestre. 14

20 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 11: Proiezione di cilindrica inversa Figura 12: Proiezione di cilindrica inversa Sul meridiano centrale la rappresentazione è equidistante. La deformazione di scala cresce rapidamente quando ci si allontana dal meridiano centrale; per questo motivo si è scelto di rappresentare la superficie terrestre mediante diversi fusi, cioè di suddividere l ellissoide in tanti spicchi delimitati da due meridiani e di rappresentare ogni fuso considerando il meridiano centrale come meridiano di riferimento. La proiezione inversa di Mercatore diventa universale facendo ruotare il cilindro orizzontale di una misura angolare costante e proiettando ogni fuso in modo indipendente. 15

21 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 13: Proiezione di Gauss 16
22 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 3.2. Sistemi di coordinate geografiche Un metodo di proiezione deve essere associato a un sistema di coordinate geografiche, ossia a una griglia regolare collocata su una proiezione per misurare posizioni, distanze e aree rispetto a un sistema di riferimento. Un sistema di coordinate geografiche permette di individuare ogni punto sulla superficie Terra attraverso un insieme di numeri o lettere. Le coordinate sono spesso scelte in modo tale che uno dei numeri rappresenta la posizione verticale, e due o tre numeri rappresentano la posizione orizzontale Latitudine e longitudine Il più noto sistema di coordinate geografiche usa le misure di latitudine e longitudine per determinare la posizione di un punto sulla superficie terrestre. La latitudine è la coordinata geografica pari all'altezza del polo celeste sull'orizzonte. Le linee di latitudine vanno da nord e sud parallelamente all'equatore, con numeri positivi che rappresentano l'emisfero settentrionale, numeri negativi che rappresentano l'emisfero sud mentre all'equatore sono assegnati 0 gradi di latitudine. La latitudine è dunque pari all'angolo che la verticale di un punto sulla superficie della Terra forma con il piano equatoriale. Tale angolo viene misurato in gradi sessagesimali e può assumere valori nell'intervallo da 0 a 90 N e da 0 a 90 S. I punti la cui latitudine è un angolo retto sono detti poli. Il polo dal quale la rotazione del pianeta è vista come antioraria è detto polo nord, l'altro polo sud. La latitudine nell'emisfero centrato sul polo nord si indica come latitudine nord, l'altra come latitudine sud, e i rispettivi emisferi come boreale e australe. La longitudine di un punto sulla superficie terrestre è l'angolo est o ovest da un meridiano di riferimento, il meridiano di Greenwich, ad un altro meridiano passante per quel punto. Tutti i meridiani sono metà di grandi ellissi (spesso impropriamente chiamati grandi cerchi), che convergono ai poli nord e sud. L angolo viene misurato in gradi sessagesimali su un piano perpendicolare all'asse terrestre e può assumere valori nell'intervallo da 0 a 180 E e da 0 a 180 W. Figura 14: Latitudine e longitudine 17
23 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Universal Transverse Mercator (UTM) UTM è un sistema di coordinate globali proiettato secondo la proiezione di Gauss e definisce la posizione attraverso due coordinate metriche Si è diviso il globo in 60 fusi, con meridiani intervallati di 6 in 6. I fusi sono individuati con numeri arabi, il numero 1 è l'opposto del meridiano di Greenwich e la rotazione è nel senso del moto di rotazione della Terra. La posizione è individuata in metri: la coordinata X (Easting) misura la distanza dal meridiano centrale; la coordinata Y (Northing) misura la distanza dall equatore: per non avere coordinate x negative, è considerata una falsa X (false easting) di m; per lo stesso motivo, nell emisfero meridionale è considerata una falsa Y (false northing) di m. Per suddividere ancor più la superficie del globo, oltre ai fusi, si individuano le fasce, costituite dalle superfici comprese fra due paralleli successivi, aventi un differenza di latitudine di 8 a partire dall'equatore, fino a 80 N e a 80 Sud. Figura 15: Suddivisione globo UTM Le fasce risultano essere 10 a Nord e 10 a Sud, e sono indicate con lettere maiuscole. Nell'intersezione dei fusi si hanno le zone, le quali sono indicate con il numero del fuso accompagnato dalla lettera della fascia. Il territorio italiano è contenuto nei fusi UTM 32 nord e 33 nord: il fuso 32 è compreso tra il meridiano 6 e il meridiano 12 (meridiano centrale 9 ); il fuso 33 è compreso tra il meridiano 12 e il meridiano 18 (meridiano centrale 15 ). 18
24 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 16: Suddivisione Italia UTM Per aver maggiore frazionamento, si scompone la zona in quadrati di 100 km di lato, che si individuano con altre lettere maiuscole, indipendenti da quelle delle fasce. Ad ogni colonna di quadretti si da una lettera e così ad ogni riga, in modo che un quadretto è individuato da due lettere, quella della propria colonna e quella della propria riga, che si scrivono in questo ordine Gauss-Boaga Il sistema Gauss-Boaga è proiettato secondo la proiezione di Gauss, con orientamento a Monte Mario (Roma). L Italia è divisa in due fusi (ovest e est) con una zona di sovrapposizione, le coordinate di GaussBoaga piane sono espresse in metri: per la latitudine (northing, dimensione Y) il riferimento è l equatore; per la longitudine (easting, dimensione X) è il meridiano centrale del fuso Ovest del sistema nazionale. Per evitare di avere coordinate con valori numerici negativi e, si è adottata la soluzione di assegnare una falsa X di m. 19
25 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 17: Suddivisione Italia Gauss-Boaga Cassini-Soldner L intero territorio italiano è rappresentato catastalmente attraverso un insieme di circa Fogli di mappa con le seguenti caratteristiche: 1. perimetro chiuso; 20
26 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 2. scala: 1:4000 montagna; 1:2000 collina e pianura; 1:1000 centri urbani(con sviluppi 1:500); 3. quadro d unione su foglio unico 1:25000; 4. identificati dal nome del comune censuario e da un numero progressivo; 5. suddivisi in particelle numerate progressivamente per ogni foglio di mappa ed eventualmente suddivise in subalterni. Figura 18: Mappa catastale Il sistema di riferimento catastale è caratterizzato da: ellissoide di Bessel orientato a Genova Osservatorio Istituto Idrografico Militare per il nord Italia, a Roma Monte Mario per il centro e Messina Castanea delle Furie per il sud; proiezione di Cassini-Soldner con: coordinate riferite al centro di riferimento (origine); le coordinate catastali hanno come origine (centro della proiezione) 849 origini, 31 con grandi estensioni e 818 con piccole estensioni; cilindro trasverso tangente lungo il meridiano passante per il centro di riferimento. 21
27 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità La proiezione di Cassini-Soldner, afilattica2, entro un raggio di circa 70 Km presenta una deformazione lineare massima del 0,006% nella direzione del meridiano, e nulla nella direzione del parallelo. Negli ambiti in cui è utilizzata è praticamente equivalente (caratteristica che la rende interessante per gli usi catastali) Sistemi di coordinate in uso Italia Gauss-Boaga basato su Roma40 (proiezione Mercatore inversa, datum Roma40) Internazionale UTM basato su WGS84 (proiezione Mercatore inversa, datum WGS84) Europa UTM basato su ED50 (proiezione Mercatore inversa, datum ED50) UTM basato su ETRF89 (proiezione Mercatore inversa, datum ETRF89) Francia Lambert 93 (RGF93) (proiezione Lambert conica conforme, datum GCS NTF) Germania DHDN (proiezione Mercatore inversa, datum Deutsche Hauptdreiecksnetz) Gran Bretagna British National Grid (BNG) basato su OSGB36 (proiezione Mercatore inversa, datum OSGB36) Olanda Rijksdriehoekstelse (RD) basato su Stereographic, datum AMERSFOORT) Svizzera Swiss Grid basato su CH1903 (proiezione Rosenmund cilindrica obliqua, datum CH1903) Australia Australian Map Grid (AMG84) basato su AGD84 (proiezione Mercatore inversa, datum AGD84) Stati Uniti UTM basato su NAD83 (proiezione Mercatore inversa, datum North American 1983) AMERSFOORT (proiezione Double SPCS (State Piane Coordinate System) basato su NAD83 (proiezione Mercatore inversa, datum North American 1983) Si definiscono afilattiche le rappresentazioni che ammettono tutti e tre i tipi di deformazione ma in modo tale che ognuna di queste sia la più piccola possibile. 2 22
28 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 3.3. Tecnologie In questo capitolo sarà brevemente descritto lo stato dell arte delle tecnologie utilizzate per individuare in maniera universale e con precisione una posizione geografica sulla superficie della Terra in un dato sistema di riferimento geografico Sistemi di posizionamento globale Le moderne tecnologie utilizzano sistemi satellitari per la localizzazione e navigazione terrestre, marittima o aerea. Un GPS (Global Positioning System) è un sistema di geo-radiolocalizzazione che utilizza una rete di satelliti artificiali in orbita e pseudoliti3. Il sistema è dedicato alla fornitura di un servizio di posizionamento geo-spaziale a copertura globale che permette a piccoli ed appositi ricevitori elettronici di determinare le loro coordinate geografiche (longitudine, latitudine ed altitudine) su un qualunque punto della superficie terrestre o dell'atmosfera con un errore di pochi metri, elaborando segnali a radiofrequenza trasmessi in linea di vista da tali satelliti Sistemi di posizionamento globale in funzione NAVSTAR GPS Il sistema statunitense Navigation Satellite Timing And Ranging Global Positioning System (NAVSTAR GPS) consiste di 32 satelliti operanti su 6 piani orbitali circolari ad un altezza di Km, alcuni dei quali in disuso e altri di riserva. L U.S. Air Force Space Command ha dichiarato il sistema completamente operativo il 27 aprile 1995, una volta terminato il completo posizionamento dei satelliti del Blocco II/IIA sulle orbite assegnate e dopo avere effettuato i test operativi in ambito militare. Il sistema permette di eseguire il posizionamento di punti appartenenti alla superficie terrestre, ovvero la determinazione della posizione dei punti interessati in un assegnato sistema di riferimento. Il posizionamento che si ottiene con il GPS è tridimensionale, quindi contemporaneamente planimetrico e altimetrico. Le principali caratteristiche del sistema GPS sono: elevata precisione; possibilità di impiego 24 ore su 24, 365 giorni dell anno; funzionalità in qualsiasi condizione meteorologica; non occorre la collimazione(non è necessaria la visibilità tra i due punti); semplificazione nell'individuare la rete di inquadramento; riduzione di tempo nelle operazioni preliminari del rilievo non è necessaria la presenza di personale specializzato; omogeneità del sistema di riferimento (WGS84) per tutti i rilievi. 3 Trasmettitore di segnale installato, prevalentemente in modo stabile, a terra. 23
29 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Le principali applicazioni di GPS sono attualmente tre, in funzione della precisione, della strumentazione impiegata e, conseguentemente, dei costi: applicazioni geodetiche: con precisioni centimetriche (come reti di controllo o di inquadramento regionale ed applicazioni fotogrammetriche); applicazioni topografiche: con precisioni decimetriche (come posizionamento di infrastrutture regionali, rilievi di alvei e così via); applicazioni classiche di navigazione: con precisioni metriche (determinazione della posizione dell antenna in movimento in tempo reale). Il livello di precisione dipende: modalità di misura; distanza punto-satellite; caratteristiche del ricevitore; tecniche di rilievo; numero e configurazione dei satelliti impiegati. I sottosistemi che compongono il sistema GPS vengono chiamati segmenti, e sono tre: segmento spaziale; segmento di controllo; segmento di utilizzo Segmento spaziale Sono i satelliti che inviano alla terra i segali elettromagnetici. La costellazione attualmente è costituita da 32 satelliti,di cui 28 operanti e 4 di scorta, sono collocati su 6 orbite circolari inclinate di 55 sul piano equatoriale e distanziato di 60. Il raggio delle orbite è di circa km. Ciascun satellite impiega 12 ore siderali per compiere l'intera rivoluzione, corrispondenti a 11h 56, per cui i satelliti si presentano ogni giorno con 4 minuti di anticipo rispetto al giorno precedente. I satelliti trasmettono a terra dati contenenti un segnale di tempo, le proprie effemeridi orbitali (ovvero le coordinate X(t)s, Y (t)s, Z (t)s), e informazioni varie quali il proprio numero di identificazione, lo stato di salute, etc. Tutti i dati sono trasmessi mediante un codice binario modulato su due frequenze portanti radio. I codici usati nella trasmissione sono: il codice C/A ( coarse acquisition, ovvero acquisizione grossolana ) e il P ( precision, consente una precisione molto maggiore), con frequenza di modulazione rispettivamente pari a 1 e 10 MHz e sono accessibili a tutti gli utenti. I satelliti NAVSTAR pesano 850 kg e hanno una vita di 7-8 anni e a bordo contengono 4 orologi atomici. Compiti principali del segmento sono: 24
30 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità trasmettere e ricevere informazioni dalle stazioni di controllo; trasmettere informazioni agli utenti tramite le onde; misurare il tempo con gli orologi atomici; eseguire correzioni orbitali secondo i parametri assegnati dalle stazioni di controllo Segmento di controllo E una struttura a terra che gestisce e controlla l'intera costellazione di satelliti definendone la posizione. E' un'attività svolta da: cinque stazioni di tracking a terra distribuite in prossimità dell'equatore e nell'ambito di basi militari. Le stazioni di tracking, dotate di apparati di ricezione estremamente precisi, seguono con continuità i satelliti, rilevandone l orbita. Le posizioni note di questi 5 punti definiscono in pratica il sistema di riferimento nel quale le orbite vengono calcolate. I satelliti compiendo l'intero giro della terra in 12 ore passano 2 volte sopra le stazioni che a quel punto misurano la loro altezza, la loro velocità, la loro posizione e quindi viene presunta la loro orbita, rilevando le variazioni rispetto al modello matematico. Tale variazioni sono indicate come errori delle effemeridi; una stazione principale di controllo (master), situata a Colorado Springs, negli Stati Uniti. La stazione master riceve i dati rilevati dalle stazioni di tracking, i quali vengono elaborati per calcolare le effemeridi orbitali di previsione dei vari satelliti, e per valutare le correzioni da apportare periodicamente sia agli orologi dei satelliti stessi sia, eventualmente, anche alle orbite. La stazione master è dotata di sofisticate apparecchiature di elaborazione e di un orologio atomico di riferimento all idrogeno, più preciso di quelli (al cesio o al rubidio) presenti a bordo dei satelliti; tre stazioni di trasmissione che ricevono i dati corretti dalla stazione master e li trasmettono periodicamente ai satelliti, effettuando il cosiddetto upload (aggiornamento) dei satelliti stessi. I dati orbitali e di tempo trasmessi dai satelliti a terra sono quindi più affidabili subito dopo l effettuazione di un upload, e si degradano via via, fino al successivo. Con le tecniche di misura in uso l effetto di tale degrado sui risultati è tuttavia modesto Segmento di utilizzo Sono le apparecchiature per la ricezione e l'interpretazione dei segnali emessi dai satelliti per la determinazione della posizione. E' costituita dagli utilizzatori militari o civili che devono essere provvisti del necessario equipaggiamento. Questo può essere più o meno sofisticato, ma in ogni caso composto da un'antenna e un ricevitore in grado di captare i segnali dei satelliti,o per ottenere il posizionamento tridimensionale in tempo reale, o in posizione statica per raccogliere dati da usare in una successiva elaborazione che fornisce risultati più precisi e in linea con le esigenze dei rilievi topografici. Tutti i ricevitori hanno un oscillatore che riproduce un segnale elettromagnetico identico a quello ricevuto dai satelliti anche se con una precisione e una stabilità minore. Quindi per ogni segnale ricevuto da ciascun satellite viene generata la riproduzione dello stesso 25
31 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità segnale, detta replica, la quale è necessaria per determinare la distanza tra il centro dell'antenna e del satellite Principio di funzionamento Il compito del sistema è quello di determinare la posizione tridimensionale di un punto. Il principio di funzionamento dei sistemi di navigazione basati su satelliti è analogo a quello dei sistemi di navigazione classici, e si basa nella misura delle distanze fra il ricevitore ed i satelliti facendo uso dei segnali radio. Per misurare questa distanza, in sostanza il ricevitore riceve un messaggio dal satellite in questione e calcola il tempo che occorre al segnale corrispondente a viaggiare dal trasmettitore montato sul satellite all antenna del ricevitore stesso. Siccome la velocità delle onde radio utilizzate è nota e costante rispetto a qualsiasi osservatore, la distanza fra il trasmettitore ed il ricevitore può essere calcolata facilmente e con grandissima precisione. Ciascun satellite emette onde radio che trasportano informazioni di vario tipo, queste emissioni sono governate dai quattro orologi atomici di grandissima precisione e stabilità che sono a bordo del satellite. Il segnale radio (oltre all'istante preciso dell'emissione) trasporta informazioni connesse all'esatta posizione del satellite nell'orbita. Quando il segnale viene captato dal ricevitore viene misurato il tempo che esso impiega per raggiungere l'antenna: esso permetterà di determinare la distanza tra satellite e antenna. Misurando simultaneamente le distanze di tre satelliti è possibile effettuare una trilaterazione da punti noti per calcolare la posizione del centro dell'antenna. Il punto risulta l'intersezione di tre sfere i cui centri corrispondono alla posizione dei satelliti. 26
32 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 19: Triangolazione satellitare Le misure con cui si perviene al posizionamento GPS possono essere essenzialmente raggruppate in due categorie: 1. misure di pseudoranges (pseudodistanze); 2. misure di FASE sulla portante (carrier phase). Si tratta di due modalità di misura completamente diverse con le quali si ottengono due livelli di precisione ben distinti, adatti ad impieghi differenti. Si seguito descriviamo esclusivamente la prima in quanto è quella maggiormente utilizzata. Il metodo per misura di pseudoranges è il metodo concettualmente e praticamente più semplice, ma anche il meno preciso. E basato sul semplice principio esposto in precedenza: effettuare misure di distanza dal punto incognito a terra a satelliti di posizione nota; si tratta in pratica di eseguire una intersezione all indietro in tre dimensioni con sole misure di distanza con i satelliti che fungono da trigonometrici. Si tratta di misurare il tempo necessario al segnale emesso dal satellite per raggiungere l'antenna del ricevitore. Conoscendo la velocità c di propagazione nel vuoto del segnale e il tempo T intercorso dall'invio alla successiva registrazione di un segnale modulato sulla portante si può in linea teorica calcolare la distanza d: d= c T La misura T viene eseguita confrontando il segnale registrato con quello prodotto come replica, valutando di quanto questo deve essere traslato nel tempo per ottenere l'allineamento con il codice ricevuto dal satellite. Dunque T viene determinato dal tempo che permette di allineare i due segnali modulati dai codici C/A e P. Conoscendo l'istante Toi in cui il segnale è partito dal satellite i e l'istante Tr nel quale esso è stato registrato dal ricevitore, tenendo conto che la sincronizzazione degli orologi dei satelliti è costantemente controllata e corretta possiamo ritenerla uguale per tutti i satelliti quindi indicando con t la differenza tra gli errori di sincronizzazione satellite-ricevitore si può ottenere l'equazione che fornisce la distanza di tra antenna del ricevitore e il satellite i: di=c (Tr - Toi) + c t E' possibile scrivere un'equazione simile a questa per ogni satellite registrato. La misura fornita è approssimata in quanto condizionata da cause d'errore: nella determinazione del tempo d'emissione del segnale; nella determinazione del tempo di registrazione del segnale; di ritardo ionosferico; di ritardo troposferico; di posizionamento dell'antenna; 27
33 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità delle effemeridi del satellite. Se consideriamo che la distanza tra satellite e antenna può essere espressa in funzione delle tre coordinate note del satellite(xi, Yi, Zi) e delle tre coordinate incognite del punto(x, Y, Z) e considerando l'errore di sincronizzazione incognito, il problema presenta 4 incognite risolvibili con 4 equazioni fornite dai segnali provenienti dai 4 satelliti; possiamo scrivere: La precisione con la quale è ottenuta la posizione del punto dopo la risoluzione delle equazioni dipende anche dal codice utilizzato nella misura (in genere dell ordine del metro) GLONASS Il sistema GLONASS (Global'naya Navigatsionnaya Sputnikovaya Sistema) è stato gestito e sviluppato per il governo dalla federazione Russa, dalla Russian Space Forces a partire dal Il progetto originale della costellazione GLONASS prevedeva la piena operatività di 24 satelliti su 3 piani orbitali operanti su orbite circolari ad un altezza orbitale di Km. A causa della grave situazione economica della Russia, nel 2002 erano ancora operativi solamente otto satelliti e la rete era pressoché inutilizzabile. Con il migliorare della situazione economica i satelliti operativi furono portati a 11 nel marzo del Tre satelliti di nuova concezione, con una vita operativa estesa a sette anni, furono lanciati il 26 dicembre In seguito ad un accordo commerciale con l'india, la rete è diventata operativa nell'aprile 2010, con 21 satelliti in funzione su 24. L'accuratezza del segnale è leggermente inferiore a quella del NAVSTAR GPS. Dal luglio 2012 la costellazione è pienamente operativa con 24 satelliti attivi, una "riserva" di 4 satelliti e 3 satelliti in stato di riparazione o fuori uso. Ciò permette un'ottima copertura quasi paragonabile al sistema americano GPS. Dopo anni in cui il sistema è stato penalizzato dal costo dei ricevitori GLONASS e dalla loro difficile reperibilità, a fine 2011 cominciano ad apparire sul mercato dispositivi elettronici di consumo che integrano ricevitori GPS e GLONASS (dei quali il più famoso è stato l'iphone 4S). Dal 2012 in poi, la compatibilità con GLONASS è diventata un caratteristica comune a molti device consumer tra i quali Samsung Galaxy S3, S4 e S5, iphone 5, 5C e 5S, Samsung Galaxy Ace 2, Nokia Lumia 920 e molti altri. 28
34 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Sistemi di posizionamento globale in fase di attivazione Galileo Il sistema di posizionamento Galileo è un sistema di posizionamento e navigazione satellitare civile, sviluppato in Europa come alternativa al NAVSTAR GPS controllato invece dal Dipartimento della Difesa degli Stati Uniti. La sua entrata in servizio è prevista per la fine del 2014 e conterà, nel 2020, 30 satelliti orbitanti su 3 piani inclinati rispetto al piano equatoriale terrestre di circa 56 e ad una quota di km. Il sistema Galileo è stato concepito principalmente per l utilizzo civile, in contrasto con il GPS, il cui scopo principale è di tipo militare. Gli Stati Uniti si riservano il diritto di limitare la potenza del segnale o l accuratezza dei sistemi GPS, o di interromperli completamente in modo che gli utenti non militari non possano accedere al servizio in tempi di conflitti. Il sistema europeo, teoricamente, non sarà soggetto ad interruzioni per propositi militari, provvederà miglioramenti significativi al segnale GPS disponibile e, una volta completato, sarà disponibile a tutti gli utenti, civili e militari, con la precisione massima. Con questo sistema si cerca di offrire quanto segue: una maggiore precisione di quella attualmente disponibile a tutti gli utenti; copertura migliorata di segnali satellitari a maggiori altitudini, di cui beneficeranno le regioni più al nord; un sistema di posizionamento affidabile anche in tempi di guerra. Si prospetta che Galileo sarà un sistema civile operato da una concessionaria commerciale Galileo. Sono previsti cinque tipi di servizi di posizionamento: il servizio aperto (OS), di accesso libero e gratuito. I segnali OS saranno trasmesse in due bande, a MHz ed a MHz. I ricevitori raggiungeranno un accuratezza di meno di 4 m orizzontali e di meno di 8 m verticali con l uso di entrambe le bande OS. I ricevitori a singola banda invece raggiungeranno un accuratezza di meno di 15 m orizzontali e di meno di 35 m verticali, paragonabile a quella provvista nel presente dal servizio GPS C/A. Si aspetta che la maggioranza dei futuri ricevitori nei mercati di massa processeranno entrambi i segnali GPS C/A e Galileo OS, per una copertura massima; il servizio commerciale cifrato, (CS) sarà disponibile mediante il pagamento di un certo importo, ed offrirà un accuratezza minore ad 1 m. Il CS può anche essere utilizzato insieme a sistemi di stazioni a terra per aumentare l accuratezza a meno di 10 cm. Il segnale verrà trasmesso in tre frequenze, le due utilizzate dai segnali OS più una di MHz; il servizio pubblico regolato (PRS) ed il servizio di protezione della vita (SoL) provvederanno un accuratezza paragonabile a quella del servizio aperto. L obiettivo principale è la robustezza di fronte ad interferenze e rilevamento di problemi entro i 10 secondi. Questi servizi saranno destinati ad autorità di sicurezza (polizia, militari, etc.) ed applicazioni critiche di trasporto (controllo del traffico aereo, atterraggio automatico di aerei, ecc), rispettivamente. 29
35 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità In aggiunta, i satelliti Galileo saranno capaci di rilevare e riportare segnali COSPAS-SARSAT di ricerca e soccorso nella banda MHz MHz, e questo gli farà parte del sistema Global Maritime Distress Safety System. Galileo migliorerà lo scenario offerto dai GPS agendo su tre caratteristiche, la precisione, la disponibilità e la copertura. La precisione dei GPS sarà migliorata grazie alla possibilità di utilizzare una costellazione combinata GPS-Galileo, grazie all interoperabilità tra i due sistemi. In questo modo, il numero di satelliti costantemente disponibili raddoppierà, permettendo misure più precise. Per lo stesso motivo, il numero maggiore di satelliti che diffondono un segnale di geo-localizzazione, permetterà di avere un servizio con maggiore disponibilità, anche in ambienti a visibilità limitate, come nei centri urbani dove si verifica il fenomeno dei canyon urbani, ovvero l oscuramento parziale dei segnali GSP da parte degli edifici, in particolare se molto alti e densi. Infine, la copertura offerta da Galileo in alcune aree geografiche sarà migliore del GPS, per come è stata progettata la posizione dei satelliti. In particolare, è stata curata una maggiore copertura del Nord Europa. Anche a livello di servizio, Galileo sarà migliorativo rispetto al GPS, offrendo alcune caratteristiche ora assenti nei GPS, come i servizi di integrità garantita del segnale, e in generale l affidabilità del sistema, oppure la possibilità di accedere ai dati grezzi non elaborati. Oltre a tutte queste caratteristiche, Galileo Supervisory Authority e Galileo Concessionaire daranno luogo ad un framework istituzionale con il compito di regolare e facilitare lo sfruttamento di Galileo a livello del mercato globale. Le applicazioni che nascono ogni giorno sono moltissime e questo enorme mercato è destinato a raggiungere 3 miliardi di utenti entro il IRNSS Indian Regional Navigational Satellite System (IRNSS) è un sistema di navigazione satellitare regionale, di proprietà del governo indiano. Il sistema è stato sviluppato dalla Indian Space Research Organization (ISRO). IRNSS sarà un sistema di navigazione indipendente e autonomo che intende coprire con i propri servizi un'area di circa 1500 chilometri intorno all India. Il sistema sarà sotto il completo controllo indiano, con il segmento spaziale, segmento di controllo e il segmento di utilizzo tutti in sviluppati in India. Il sistema sarò attivo a partire dal Beidou Beidou Navigation Satellite System è un sistema di navigazione satellitare cinese. Si compone di due distinte costellazioni di satelliti. Il sistema è un sistema di navigazione satellitare globale composto da 35 satelliti ed è in fase di costruzione a partire da gennaio Si prevede che inizierà a servire clienti a livello mondiale dopo il suo completamento nel Ad oggi non si hanno ancora informazioni dettagliate sui servizi che saranno offerti e sulle relative precisioni. 30
36 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Geocoding Il termine geocoding è utilizzato per descrivere il processo che associa coordinate geografiche ad altri dati geografici, come indirizzi stradali, codici di avviamento postale o toponimi. Le coordinate geografiche possono essere poi utilizzate per inserire l informazione collegata al dato geografico originario in un sistema di gestione delle informazioni geografiche oppure le coordinate possono essere incorporate in altri supporti come le fotografie digitali tramite geotagging4. La metodologia correntemente utilizzata dai sistemi di geocoding utilizza la ricerca degli indirizzi a partire da un grafo stradale georeferenziato interpolando poi le informazioni ricavate. Poiché non esiste uno standard per la codifica degli indirizzi, la ricerca può produrre risultati ambigui, come nel seguente caso5: Indirizzo ricercato: via Sassari Cagliari (sistema di riferimento Gauss-Boaga-Roma40 fuso Ovest) Risultati del processo di geocoding: 1. Indirizzo: Via Sassari Comune: Cagliari Provincia: Cagliari Coordinate: Indirizzo: Via Cagliari Comune: Sassari Provincia: Sassari Coordinate: Oggigiorno sono accessibili diversi sistemi che forniscono servizi di geocoding. Tra questi si evidenziano: MapQuest (parzialmente gratuito); Google Maps (parzialmente gratuito, con obbligo di indicare il logo Google Maps); Yahoo PlaceFinder (parzialmente gratuito, con obbligo di indicare il logo Yahoo Maps); Bing Maps (Microsoft) (gratuito per utilizzi non commerciali); Services using OpenStreetMap data (gratuito); USC Geocoder (parzialmente gratuito); geoplugin (parzialmente gratuito); GovMapper Geocoding (parzialmente gratuito); SmartyStreets (gratuito per utilizzi non commerciali). Tra le Pubbliche Amministrazioni italiane, ricordiamo i servizi di geocoding offerti dalla Regione Sardegna (riguardano il solo territorio regionale). I servizi sono forniti sia in maniera interattiva, attraverso il 4 5 Vedi il successivo paragrafo Si è utilizzato il servizio di geocoding del Geoportale della Regione Sardegna 31
37 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Geoportale della Regione, che via batch. In questo ultimo caso il sevizio REST è interrogabile in due modalità: Geocoding (KML). Questo servizio consente di specificare un indirizzo in formato strutturato o libero e fornisce una risposta conforme alle specifiche KML.; Geocoding (OpenLS). Questo servizio consente di specificare un indirizzo in formato strutturato o libero e fornisce una risposta conforme alle specifiche OpenLS Reverse geocoding l processi di reverse geocoding, a fronte di una coppia di coordinate espresse in un determinato sistema di riferimento, forniscono l indicazione dell indirizzo toponomastico più vicino interrogando una banca dati geografica generalmente costituita dal grafo stradale. I sistemi elencati nel paragrafo precedente forniscono, oltre ai servizi di geocoding, anche i servizi di reverse geocoding Geotagging Il processo di geotagging consiste nell aggiungere informazioni riguardanti la posizione geografica ad un media digitale quale foto, video, SMS, RSS feeds, etc. Le informazioni aggiunte solitamente corrispondono a coordinate geografiche. I processi di geotagging più comunemente utilizzati riguardano fotografie prodotte con le moderne camere digitali o smartphone provvisti di ricevitori GPS incorporati. In questi casi i device digitali inseriscono automaticamente le coordinate geografiche (solitamente nel sistema di riferimento WGS84) nei metadati associati alla fotografia (ad esempio il formato JPEG contiene specifici tag per la geolocalizzazione). Queste informazioni possono essere poi lette ed utilizzate da numerosi programmi software Geoparsing Geoparsing è il processo di assegnazione di indicatori geografici (ad esempio un indirizzo, un CAP o coordinate geografiche espresse in un dato sistema di riferimento) a singole parole o frasi in un testo libero ovvero in una sorgente di informazioni non-strutturate, per esempio 10 km a nord di Napoli. Questa tecnica, dal punto di vista teorico, si può anche applicare a riferimenti di luoghi presenti in altre forme di media digitali, per esempio un contenuto audio in cui lo speaker cita il nome di una località. Le metodologie di geoparsing sono differenti da quelle di geocoding in quanto, mentre il geocoding tratta esclusivamente dati geografici non ambigui, geoparsing analizza riferimenti ambigui e non strutturati e prevede due fasi distinte: 1. estrazione delle entità (entity extraction). Questa fase utilizza tecniche di analisi del linguaggio naturale (natural processing language o NPL) per identificare i nomi di località o toponimi in un testo; 32
38 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 2. precisazione del significato (disambiguation). Questa fase associa al nome della località o al toponimo la sua corretta posizione. Il risultato del geoparsing di un testo può naturalmente essere rappresentato graficamente riportandolo su una mappa geografica. Le tecniche di geoparsing ad oggi risultano non ancora perfettamente efficienti ed affidabili. Identificare il nome di una località in un testo è una operazione complessa e soggetta alle ambiguità del linguaggio naturale. I sistemi di geoparsing devono non solo comprendere le parole presenti in una frase, ma essere in grado di discriminare che quelle parole si riferiscono al nome di un luogo. Ad esempio la parola Napoli si può riferire all area urbana di Napoli, ma anche alla squadra di calcio, oppure alla pizzeria O Bella Napoli, etc. Inoltre una volta che in un testo non-strutturato il nome di un luogo è stato identificato, il passo successivo di precisazione del singolo esatto luogo è nuovamente complesso, ad esempio San Lorenzo di riferisce ad un quartiere di Roma, Napoli o Milano oppure alla frazione San Lorenzo del comune di Budoni nella provincia di Olbia-Tempio. Questo passo spesso richiede una nuova analisi del contesto e qualche volta è comunque impossibile risolvere le ambiguità. Considerato quanto sopra esposto i sistemi software realizzati per automatizzare le tecniche di geoparsing sono considerati solo parzialmente affidabili e, in generale, richiedono comunque un intervento manuale. Tra i software presenti sul mercato si possono citare: GeoDoc. On-line software che fornisce un servizio di geoparsing (solo in inglese). CALVIN (Cartographic Location And Vicinity INdexer). Software open source utilizza tecniche di entity resolution basate sui concetti di contesto geografico e risoluzione delle ambiguità tramite gazetteer (solo inglese). LocateXT. Software per ricercare le coordinate e nomi di luoghi in sorgenti di informazioni non strutturate (solo inglese). Si interfaccia con le piattaforme ESRI6 e Google Earth Toponimi e servizi di Gazetteer Il toponimo è il nome proprio di un luogo geografico. I nomi geografici costituiscono un importante meccanismo per georeferenziare una grande varietà di informazioni. La specifica nazionale di riferimento per la gestione dei toponimi e delle località significative è la 1n per la realizzazione dei DataBase Topografici. In particolare il documento 1n1007_1 fornisce la descrizione delle singole Classi, del loro contenuto, della loro componente spaziale, dei loro attributi e dei valori assunti da tali attributi. Il documento 1n1007_2, invece, specifica le indicazioni di riferimento per una completa definizione del dettaglio delle Specifiche di una classe. Secondo lo standard ISO19112 (anche norma nazionale UNI-EN-ISO19112:2005) un Gazetteer è una raccolta di identificativi geografici, riconducibili al concetto di toponimi. Un servizio di ricerca toponimi (assimilabile concettualmente ad un servizio di Gazetteer) è un servizio che, dato un nome di un luogo, è in grado di restituirne la localizzazione geografica. Open Geospatial Consortium (OGC) ha definito uno 6 7 ESRI è uno dei maggiori produttori mondiali di software per sistemi informativi geografici Si veda la Bibliografia 33
39 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità standard per implementare un servizio di Gazetteer attraverso l utilizzo del servizio Web Feature Service (WFS), o meglio, attraverso la definizione di un profilo applicativo dello standard WFS, che prende il nome di WFS-G. Un esempio di ricerca toponimi è quello realizzato dalla Regione Sardegna tramite il quale è possibile cercare nomi di località, città, monti, fiumi, laghi, etc. presenti nella banca dati dei toponimi della Regione Sardegna (dizionario dei toponimi) e successivamente visualizzarli su una mappa geografica. 34
40 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 20: Ricerca toponimi Regione Sardegna 35
41 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 21: Risultati ricerca toponimi Regione Sardegna La completezza dei toponimi è garantita dalla scelta di molteplici fonti informative, anche a scale diverse, quali: la Carta Tecnica Regionale (CTR) alla scala 1: (CTR10k); le carte IGM alle scale , e ; le carte Touring Club Italia ed la banca dati DBPrior10k. Nello specifico, la CTR fornisce i toponimi di dettaglio, mentre il Touring Club Italia i toponimi delle macroregioni (Campidano, Gallura ecc.) non presenti alle scale maggiori. La realizzazione dei toponimi, in funzione della scala di visualizzazione, è stata eseguita mantenendo una densità media tale da garantire la copertura del territorio e la leggibilità della carta. 36
42 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 22: Visualizzazione toponimi Regione Sardegna Sistema catastale italiano Il Catasto ha lo scopi variegati: fiscale, topografico, economico e di ordine vario: 1. fiscale. La ragione basilare della formazione del nuovo catasto fu quella di "perequare l'imposta". Questo concetto si basa sul principio che l'imposta deve essere generale e commisurata al reddito ritraibile dai beni in godimento; 2. topografici. Visto che il rilievo planimetrico delle mappe catastali è stato eseguito dal Catasto con buona precisione, i dati riportati nelle mappe catastali vengono utilizzati per lo studio e la progettazione sia per le opere di interesse pubblico che per quelle di interesse privato; 3. economici. I dati catastali vengono utilizzati per definire lo stato e la suddivisione della proprietà, per facilitare la ricerca di determinati dati economici, stime, consistenza patrimoniale di persone fisiche o giuridiche; 37
43 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 4. di ordine vario. I dati del Catasto Terreni e del Catasto Fabbricati, vengono utilizzati per facilitare la corresponsione dei crediti, per l'individuazione univoca del bene in fase di atti di compravendita, di procedimenti amministrativi, per accertare diritti di godimento sui beni immobili, per esperire determinate situazioni di fatto in sede di procedimenti giudiziari. Il catasto si suddivide in Catasto Fabbricati e Catasto Terreni. Il primo individua gli Immobili, il secondo i Terreni. I dati relativi agli immobili censiti al Catasto Fabbricati sono: Indirizzo: ubicazione dell immobile, comprensiva del numero civico, scala, piano e interno dell unità immobiliare. Zona censuaria: porzione omogenea di territorio comunale (ordinariamente è una sola per i Comuni medio piccoli e più di una per le città più grandi), nell ambito della quale la redditività dei fabbricati è da considerarsi uniforme. Può comprendere un solo Comune o una porzione del medesimo, con caratteristiche ambientali e socioeconomiche simili. Per ogni zona censuaria esiste uno specifico quadro tariffario consultabile presso l'ufficio provinciale - Territorio dell Agenzia. Categoria: tipologia delle unità immobiliari, presenti nella zona censuaria, differente per le caratteristiche intrinseche che ne determinano la destinazione ordinaria e permanente. Classe: parametro che identifica il grado di produttività delle unità immobiliari appartenenti alle categorie dei gruppi A, B e C. Viene indicata con U (unica) in assenza di una ripartizione in classi della categoria (ciò, in quanto, la redditività è omogenea all interno del Comune o della zona censuaria) ovvero con i numeri da 1 a n al crescere della redditività. Consistenza: dimensione dell'unità immobiliare. Per le abitazioni e gli uffici (immobili della categoria A) è espressa in "vani". Per i negozi, i magazzini, le rimesse (immobili della categoria C) è espressa in metri quadrati. Per gli immobili a destinazione collettiva (ospedali, caserme, ecc.) è espressa in metri cubi. Per gli immobili appartenenti alle categorie speciali dei gruppi D ed E non viene indicata la consistenza catastale. Rendita: per le unità immobiliari appartenenti alle categorie dei gruppi A, B e C, la rendita catastale è determinata moltiplicando la consistenza per la tariffa unitaria specifica per Comune, zona censuaria e corrispondente alla categoria e classe. Per le unità immobiliari appartenenti ai gruppi delle categorie D ed E la rendita è determinata attraverso stima diretta. I dati relativi ai terreni censiti al Catasto Terreni sono: Qualità: tipo di macrocoltura agraria attribuita a una particella del Catasto terreni, o sua porzione, avente rilevanza ai fini della conservazione del Catasto. Qualora la particella sia suddivisa in porzioni che presentano colturali diverse viene riportata la dicitura Modello 26 senza ulteriori dettagli disponibili solo attraverso una visura ordinaria. Classe: parametro che identifica il grado di produttività delle particelle interessate da una qualità di coltura. Viene indicata con U (unica) in assenza di una ripartizione in classi della categoria (ciò, in quanto, la redditività è omogenea all interno del Comune o della zona censuaria) ovvero con i numeri da 1 a n dove la classe 1 rappresenta quella di maggior reddito. 38
44 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Ha: superficie in ettari del terreno. Are: superficie in are del terreno. Ca: superficie in centiare del terreno. Reddito dominicale: è costituito dalla parte del reddito medio ordinario ritraibile dall esercizio delle attività agricole, che spetta al proprietario del terreno. È correlato alla qualità del terreno e alla sua produttività media ordinaria. Reddito agrario: è costituito dalla parte del reddito medio ordinario dei terreni imputabile al capitale di esercizio e al lavoro di organizzazione impiegati, nei limiti della potenzialità del terreno, nell esercizio delle attività agricole. È correlato alla qualità del terreno e alla sua produttività media ordinaria. La rappresentazione adottata il Catasto italiano è Cassini-Soldner. un immobile è identificato da foglio, particella e subalterno del Comune di appartenenza; un terreno è identificato da foglio e particella del Comune di appartenenza. Negli ultimi due decenni sono stati sviluppati, grazie all avvento delle nuove tecnologie, sistemi di conversione coordinate da Cassini-Soldner a Gauss-Boaga o ad altri sistemi di riferimento. Questi sistemi consentono di individuare con precisione la posizione delle particelle catastali, ovvero note le coordinate catastali, Comune, foglio e particella, di georeferenziare le informazioni catastali. 39
45 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità Figura 23: Visualizzazione coordinate catastali 40
46 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 4 Acronimi GIS Geographic information system IGM Istituto Geografico Militare GPS Global Positioning System NAVSTAR Navigation Satellite Timing And Ranging Global Positioning System CTR Carta Tecnica Regionale WFS Web Feature Service OGC Open Geospatial Consortium RSS RDF Site Summary GNSS Global Navigation Satellite System UTM Universal Transverse Mercator ED50 European Datum 1950 GLONASS Global'naya Navigatsionnaya Sputnikovaya Sistema IRNSS Indian Regional Navigational Satellite System Roma40 Roma 1940 ETRS89 European Terrestrial Reference System 1989 NAD American Datum North WGS84 World Geodetic System 84 JPEG Joint Photographic Experts Group 41
47 NeoLuoghi - Soluzioni per l esperienza culturale nei luoghi elettivi della surmodernità 5 Bibliografia 1. Topografia generale con elementi di geodesia, Giorgio Bezoari, Carlo Monti, Attilio Selvini, Editore UTET; 2. Dal GPS al GNSS (Global Navigation Satellite System). Per la geomatica, Alberto Cina, Editore CELID; 3. Introduzione alla geomatica. Manuale introduttivo ai sistemi informativi geografici, Gianfranco Amadio, Editore Flaccovio Dario; 4. Gli standard di Intesa Stato Regioni Enti-Locali per i SIT sono riportati in 5. Open Source Geospatial Foundation, 6. Open Geospatial Consortium, 42
48 Technical Report TR D3.5.2 Analisi dello stato dell'arte sulle tecniche di image processing ed in particolare sulle tecniche di ripresa aerea Il presente documento costituisce il technical report TR previsto nel report di ricerca D3.5 Relazione su scenari, modelli implementativi e specifiche architetturali/funzionali di soluzioni di image processing ed information processing per la generazione massiva di punti di interesse georeferenziati nei parchi impliciti (smartspotting) del progetto NeoLuoghi.
49 Indice generale 1 Introduzione Principi e concetti fondamentali del telerilevamento l processo di telerilevamento...10 La radiazione e lo spettro elettromagnetico Le grandezze radiometriche Formule e leggi fisiche alla base del telerilevamento...15 Le sorgenti naturali di energia: il Sole e la Terra...18 I fenomeni di interazione elettromagnetica Influenza dell atmosfera L assorbimento La diffusione La diffusione di Rayleigh La diffusione di Mie La diffusione non-selettiva L interazione delle radiazione con le superfici naturali La riflessione La trasmissione L emissione La firma spettrale delle superfici La vegetazione L acqua Il Suolo Il colore: misure quantitative nel telerilevamento Percezione soggettiva del colore Il sistema occhio-cervello Strumenti e dati del telerilevamento Caratteristiche e peculiarità del telerilevamento Le piattaforme per la ripresa a distanza Tecnologie e problematiche per il rilievo aereo Tecnologie di rilievo aereo I sistemi su velivoli e le principali differenze con i sistemi satellitari Quota di volo e risoluzione spaziale Risoluzione degli strumenti ottici Risoluzione degli strumenti elettro-ottici Distorsioni e problematiche Sistema GPS e piattaforma inerziale Le diverse tipologie di sensori su velivolo Sensori passivi Camere fotogrammetriche analogiche
50 Camere fotogrammetriche digitali Sensori multispettrali Sensori iperspettrali Camere termiche Sensori attivi Sistemi RADAR Sistemi Laser Camere digitali per riprese aeree e terrestri Caratteristiche delle immagini digitali I sensori Struttura dei sensori matriciali Funzionamento dei sensori matriciali La trasformazione dell immagine in forma numerica Il ground sampling distance (GSD) I sensori lineari Confrontare la geometria di presa delle camere digitali Le frame camera Frame camera mono-ccd a camera singola Frame camera mono-ccd multicamera Camere digitali aerofotogrammetriche multi-cono Le camere multi-cono Time Delay and Integration (TDI) Le camere Z/I Imaging DMC II Design Concept CCD Design Sistema ottico Configurazioni della famiglia DMC II Precisione geometrica Specifiche tecniche Le camere Vexcel UltraCam UltraCam Post-Processing and image quality control Posizionamento sul mercato dei prodotti UltraCam Dalla UltraCam-D alla UltraCam-Eagle La Vexcel UltraCam Eagle Camere fotogrammetriche a sensori lineari multipli Il principio di funzionamento delle camere a sensori lineari multipli (SML) La geometria di presa delle camere a sensori lineari multipli La camera ADS40 della Leica (LH System) Il sensore ADS40 di seconda generazione I nuovi sensori ADS80 e ADS Sistemi multi-camera obliqui Track Air MIDAS - (Multi-camera Integrated Digital Acquisition System)
51 Camere digitali Ottiche Piattaforma Unità di controllo MDC Unità fotografica Unità di navigazione Unità di controllo del supporto fotocamere Sistema GPS/INS Assemblaggio e specifiche tecniche Sistema modulare DigiCAM Single camera system Two Camera System Three Camera System Four Camera Systems Five Camera System Caratteristiche tecniche delle camere DigiCAM Microsoft UltraCam Osprey The UltraCam Osprey design Image quality Workflow e risultati 3D Techical Specification LiDAR - Airborne Laser Scanning Introduzione alla tecnologia Multiple Reflections Data collection Intensity LiDAR Data First and Last Returns Point Clouds Nominal Point Spacing Airborne Laser Scanner Riegl LMS Q Digitalizzazione dell'eco nel RIEGL LMS-Q Dati tecnici del RIEGL LMS-Q
52 Indice delle figure Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura
53 Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura
54 Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura Figura
55 Figura Figura Figura Figura Indice delle tabelle Tabella Tabella
56 1 Introduzione Il telerilevamento, in inglese Remote Sensing, è la disciplina tecnico-scientifica o scienza applicata, che attraverso un approccio multidisciplinare, si occupa dello studio del territorio e dell ambiente. Esso consente di acquisire a distanza informazioni dettagliate sulle caratteristiche qualitative e quantitative di superfici o porzioni di territorio, e formulare ipotesi interpretative sul loro stato e sui cambiamenti e i processi dinamici da cui essi sono interessati. L acquisizione dei dati in telerilevamento avviene grazie a speciali sensori che registrano le informazioni trasportate dall energia elettromagnetica emessa, riflessa o diffusa dai corpi osservati, riuscendo a rendere visibili radiazioni che l occhio umano non sarebbe altrimenti in grado di percepire. La prospettiva di osservazione varia a seconda della piattaforma che il telerilevamento utilizza (terra, aereo, satellite), infatti la distanza di osservazione dalla superficie indagata può essere minima, come nel caso di rilievi eseguiti come mezzi mobili terrestri, o negli ultimi tempi, sfruttando gli UAV (mezzi aerei senza pilota a bordo, noti anche come droni, che consentono rilievi a quote di volo bassissime) oppure estrema, grazie alle prospettive di Osservazione della Terra rese possibili a partire dagli anni 70 dall impiego delle tecnologie satellitari per usi civili. Il telerilevamento,, attraverso tecniche di image processing, o analisi vettoriale, è utilizzato in svariati campi applicativi per lo studio di fenomeni di natura diversa, fra questi i principali sono la meteorologia, per lo studio delle masse nuvolose, l agronomia e gli studi forestali, per l analisi e lo studio delle componenti vegetali, la geologia, per lo studio della superficie terrestre, l urbanistica per lo studio dello sviluppo dei centri urbani, e l idrologia, per lo studio delle acque superficiali. Nei successivi capitoli del documento si approfondiranno: I principi e i concetti fondamentali del telerilevamento; Le tematiche relative allo stato telerilevamento, concentrandosi aviotrasportabili e terrestri; Le tecniche relative all image processing ed alla analisi dei dati telerilevati per la produzione di informazioni dettagliate sul territorio; L utilizzo delle informazioni prodotte sui sistemi GIS per l analisi e la conoscenza del territorio. dell arte degli principalmente attuali sulle tecniche di tecnologie 9
57 2 Principi e concetti fondamentali del telerilevamento 2.1 l processo di telerilevamento Il telerilevamento può essere descritto come un processo che sfrutta il diverso modo in cui le superfici naturali interagiscono con l energia elettromagnetica proveniente da una sorgente (1) per ottenere informazioni sulle loro caratteristiche. Nel suo percorso questa energia interagisce con l atmosfera (2) e viene modificata in funzione della concentrazione dei suoi componenti prima di raggiungere il bersaglio. L interazione tra l energia incidente e la superfici naturale (3) lascia una traccia chiamata firma spettrale (4). Le diverse firme spettrali delle varie superfici naturali vengono raccolte e misurate da sensori montati su satelliti o aerei (5) che riprendono a distanza. I dati raccolti da questi strumenti vengono elaborati (6) per ottenerne informazioni sulle caratteristiche e lo stato di salute delle superfici indagate. L esito finale del processo è generalmente la produzione di mappe che forniscono informazioni utili per lo studio e la gestione dell ambiente (7). 1. Sorgente di energia. Il primo requisito del telerilevamento è la presenta di una fonte di energia che illumini o fornisca l energia elettromagnetica necessaria per illuminare la porzione di territorio ( scena ) che si vuole studiare. La fonte di energia può essere dunque naturale (Sole o Terra) o artificiale, come nel caso dei radar e dei lidar. 2. Interazione con l atmosfera. Nel percorso che la radiazione elettromagnetica compie per raggiungere la superficie naturale, essa attraversa l atmosfera ed entra in contatto con le particelle che la compongono, in particolare vapore acqueo, gas e polveri in sospensione. L interazione con l atmosfera può modificare la radiazione stessa, generando fenomeni di rifrazione o assorbimento di cui bisogna tener conto per una corretta interpretazione dei dati. 3. Interazione con le superfici naturali. L energia elettromagnetica che a questo punto ha raggiunto la superficie viene assorbita, riemessa o riflessa a seconda delle caratteristiche fisiche della superficie, delle sue condizioni e di altri fattori. 4. Firma spettrale delle superfici. Osservando come l interazione tra energia incidente e superficie varia nelle diverse lunghezze d onda dell energia elettromagnetica, se ne ricava una sorta di impronta digitale tipica della superficie, definita firma spettrale, che permette di distinguerla da altre superfici o corpi che hanno comportamenti diversi. 5. Sensori e piattaforme di telerilevamento. Il telerilevamento usa speciali sensori in grado di misurare e registrare l energia riflessa o emessa dalla superficie. I sensori si trovano su piattaforme poste sempre a distanza dall oggetto studiato. Nel caso dei Radar, il sensore è anche sorgente di 10
58 energia emettendo microonde. Le distanze sono variabili e possono essere prossime (da piattaforme a terra), o estreme (da satellite). 6. Trattamento dati. Il dato registrato dai sensori viene visualizzato sotto forma di immagine, che viene poi sottoposta a successivi processi di elaborazione e interpretazione al fine di estrarre le informazioni sul territorio studiato. 7. Uso dei dati. Le informazioni ottenute alla fine del processo di telerilevamento possono così essere usate da vari utenti per differenti scopi: dall analisi ambientale necessaria per una corretta pianificazione del territorio, alla riproduzione cartografica utile per la redazione di atlanti e carte turistiche. 2.2 La radiazione e lo spettro elettromagnetico Per acquisire informazioni sul territorio e sull ambiente il telerilevamento sfrutta i fenomeni legati al mondo dell energia elettromagnetica. E quindi necessario analizzare e comprendere alcuni concetti fondamentali sulla fisiche delle onde elettromagnetiche per capire quali siano i principi su cui le attività di telerilevamento si basino. Il trasferimento di energia raggiante si manifesta come un onda armonica che si propaga nello spazio, e consiste di due campi di forza, quello elettrico E e quello magnetico B, ortogonali tra loro e rispetto alla direzione di propagazione. Entrambi questi campi viaggiano alla velocità della luce c. Figura 1: Rappresentazione schematica di un campo elettromagnetico 11
59 Le caratteristiche dell onda interessanti ai fini del telerilevamento sono due: la lunghezza e la frequenza. La lunghezza λ è la distanza che separa due picchi consecutivi di un onda; essa è generalmente espressa in micron oppure nel suo sottomultiplo in nanometri. La frequenza ν equivale invece al numero di picchi d onda che passano in una dato punto in un certo intervallo di tempo; essa è normalmente espressa in hertz [Hz] o cicli al secondo. Il prodotto di queste due grandezze è costante e rappresenta la velocità di propagazione dell onda, ed è pari alla velocità della luce c. Figura 2: Onde elettromagnetiche di diversa lunghezza e frequenza Le radiazioni elettromagnetiche si distribuiscono in modo continuo lungo l asse delle lunghezze d onda (o delle frequenze); l insieme di tutte queste forme di energia viene chiamato spettro elettromagnetico. Le radiazioni vengono raggruppate convenzionalmente in regioni, o bande spettrali, che prendono il nome a seconda di alcune loro caratteristiche. I raggi X, ad esempio, si chiamano così perché erano sconosciuti all epoca in cui, nel 1895, furono scoperti per caso. Alcune denominazioni dipendono invece dalla posizione che esse hanno rispetto alla porzione del visibile: è il caso dell ultravioletto (UV) e dell infrarosso (IR); o dalla lunghezza che hanno rispetto ad altre radiazioni: così le microonde vengono definite in questo modo perché risultano essere molto più corte (micro) rispetto alle onde radio. Le microonde (1 mm 300 cm), con lunghezze d onda ben più ampie del visibile e dell infrarosso, sono rilevabili con vari strumenti, tra cui i radar. Anche le microonde vengono usate negli studi sul territorio; il loro vantaggio rispetto ad altre bande è di poter essere impiegate in qualunque condizione meteorologica, riuscendo a penetrare anche la copertura nuvolosa. Le bande dello spettro elettromagnetico telerilevamento sono le seguenti: maggiormente usate per scopi di 12
60 L ultravioletto o UV (0,01 0,4 μm) costituito dalla radiazione elettromagnetica con lunghezze d onda poste prima del limite inferiore del visibile (cioè prima del violetto). Anche se non possiamo percepire con i nostri occhi questa luce dello spettro, ci sarà capitato qualche volta di apprezzarne gli effetti: attraverso il fenomeno della fluorescenza, ad esempio. La fluorescenza altro non è, infatti, che luce visibile emessa da particolari materiali naturali, come rocce e minerali, quando questi vengono colpiti con radiazioni UV. Il visibile (0,4 0,7 μm) è l unica porzione dello spettro elettromagnetico che l occhio umano, sensore remoto naturale, è in grado di percepire, e la percepisce come un continuo arcobaleno di colori dal viola al rosso. Il Sole emette principalmente in questa regione dello spettro, ed è proprio per questo che i nostri occhi si sono specializzati a percepire queste lunghezze d onda. Figura 3: Rappresentazione dello spettro elettromagnetico alle diverse lunghezze d'onda Come si può vedere nella figura 3, questa porzione è estremamente limitata rispetto al resto dello spettro; si pensi che la regione dell infrarosso, ad esempio, è di ben 100 volte più ampia! Figura 4: Spettro nell'intervallo visibile elettromagnetico 13
61 Esistono, quindi, una quantità di radiazioni intorno a noi che non sono invisibili ai nostri occhi, e che invece possono essere percepite da altri esseri viventi (come gli insetti o i serpenti) o rilevate grazie ad appositi sensori impiegati nel telerilevamento. L infrarosso, o IR, (0,7 μm 1 mm) che ospita radiazioni con onde più lunghe rispetto a quelle del visibile, è molto ampia e viene ulteriormente suddivisa, in merito a considerazioni di tipo fisico in quattro regioni, così come riportato nella tabella seguente: Tabella 1: Suddivisione regione di emissione della radiazione infrarosso Regioni dello spettro Lunghezza dello spettro λ [μm] Infrarosso vicino 0,7-3 Infrarosso medio 3-7 Infrarosso lontano o termico 7-20 Infrarosso estremo Le regioni dell infrarosso sono assolutamente invisibili per l occhio umano e sono legate ad alcuni fenomeni di interazione energia-materia. L infrarosso lontano, ad esempio, corrisponde al mondo dell energia raggiante legata ai fenomeni termici e alla temperatura superficiale degli oggetti; per questa particolarità l infrarosso lontano, detto anche termico, è molto utile per studiare fenomeni territoriali a carattere ambientale. 2.3 Le grandezze radiometriche Il Telerilevamento misura l energia proveniente da un area osservata in una determinata unità di tempo. Questa misura è perciò quella di un flusso proprio, come la portata di un fiume rappresenta la quantità di acqua che scorre per ogni secondo attraverso una determinata sezione. Per definire in termini quantitativi questo flusso di energia, si usano così delle grandezze radiometriche. Le grandezze radiometriche che si utilizzano in Telerilevamento sono quindi tutte espressioni specifiche di flusso radiante Φ che equivale ad una potenza, e cioè energia nell unità di tempo. Il flusso radiante Φ si propaga nello spazio in tutte le direzioni e quindi si avranno delle definizioni diverse a seconda se si considera relativo ad una certa area A o si tiene conto di una determinata geometria di osservazione. Si parlerà quindi di irradianza E (densità di flusso radiante incidente), exitanza M (densità di flusso radiante in uscita), radianza L (densità di flusso radiante calcolata secondo la geometria di osservazione). La grandezza per eccellenza in 14
62 Telerilevamento è rappresentata dalla radianza L, cioè quel flusso calcolato in base alla geometria della ripresa. Quando queste grandezze si relazionano al variare della lunghezza d onda (λ), il loro significato diventa spettrale, e si avranno le seguenti nuove relazioni: 2.4 Formule e leggi fisiche alla base del telerilevamento Per comprendere meglio i meccanismi alla base delle tecniche di telerilevamento è necessario introdurre alcune leggi fisiche che permettono di discriminare il comportamento delle varie superfici. La descrizione di queste leggi ci permetterà anche di capire la dinamica di alcuni fenomeni naturali cui assistiamo tutti i giorni. Il corpo nero. Il primo concetto da introdurre è quello di corpo nero. Un oggetto che è in grado di assorbire tutta la radiazione che lo investe e che emette tutta l energia ricevuta alle varie lunghezze d onda si definisce corpo nero, o radiatore 15
63 integrale. Un tale oggetto quindi non riflette nulla e pertanto lo si può ben immaginare come nero. In realtà in natura nessun oggetto si comporta integralmente come corpo nero, però alcune superfici naturali presentano tali caratteristiche in alcune porzioni di spettro, per esempio gli oggetti che ci appaiono neri nel visibile. Legge di Planck. Questa legge esprime come un corpo nero, con temperatura T superiore allo zero assoluto, emette energia sotto forma di radiazioni. Essa descrive inoltre come tale flusso radiante aumenta in funzione della temperatura e come varia alle diverse lunghezze d onda. Figura 5: Densità di flusso radiante emessa M(l) da superfici di corpo nero poste a diverse temperature; alla temperatura di 6000 K il Sole emette molta più energia in tutte le lunghezza d onda (exitanza spettrale) rispetto sia ad una lampadina ad incandescenza, a 3000 K, sia alla superficie terrestre, che ha una temperatura media di 300 K. Dalle curve di Planck si nota inoltre che con il diminuire della T i massimi di emissione si spostano a lunghezze d onda sempre più lunghe, e che l area sottesa ad ogni curva diminuisce rapidamente. 16
64 Legge di Stefan-Boltzmann. La legge di Stefan-Boltzmann indica come la quantità totale di energia M(T) emessa complessivamente da un corpo nero, sia proporzionale alla quarta potenza della sua temperatura T e quindi aumenta molto rapidamente al crescere della stessa, come mostrato dai grafici della legge di Planck. Essa infatti corrisponde all area compresa tra una curva di Planck e l asse delle lunghezze d onda, che è assai più grande per il corpo nero che approssima il Sole rispetto a quello che approssima la Terra. Legge di Wien. Dall analisi delle curve illustrate in figura 5 si può osservare che la lunghezza d onda corrispondente alla massima emissione λ max non è sempre la stessa ma dipende dalla temperatura T. La relazione, nota come legge di Wien, mostra come la lunghezza d onda λ max si sposti verso valori più piccoli man mano che cresce la temperatura T della superficie. I valori di picco di emissione per le tre sorgenti nell esempio sopra illustrato risultano quindi essere: 9,66 μm per la superficie della Terra (nell infrarosso termico), 0,966 μm per la lampada a incandescenza (nell infrarosso vicino) e 0,483 μm per il Sole (nel blu-verde, e quindi nel visibile). Figura 6: I colori visibili in una colata di fusione sono un chiaro esempio di come, secondo la legge di Wien, al variare della temperatura vari il colore di emissione: dal giallo intenso che caratterizza il centro più caldo della colata si passa verso gli arancioni e i rossi delle zone più fredde esterne. 17
65 Legge di Kirchoff. Un altra relazione molto importante in Telerilevamento è quella che rapporta l energia assorbita da un corpo rispetto a quella emessa. La capacità di un corpo di emettere energia a una data temperatura è definita emissività e viene indicata con il parametro ε che ha valori tra 0 e 1. La proprietà di assorbire l energia incidente, invece, è definita dal coefficiente di assorbimento ed è espressa dal parametro α. Per la legge di Kirchoff l emissività di qualsiasi corpo è pari al suo coefficiente di assorbimento ovvero ε = α. In generale, un corpo con grandi capacità di assorbire energia, detto assorbitore, mostra una buona capacità di riemetterla e viceversa. Se un corpo assorbe tutta l energia incidente avrà un valore di α uguale ad 1; conseguentemente la sua ε avrà anch essa valore unitario, in altre parole, tale corpo emetterà tutta l energia assorbita. Queste che abbiamo descritto sono le caratteristiche proprie di un corpo nero, di cui si è già parlato, ovvero di un corpo che mostra massima capacità di assorbimento ed emissione per tutte le lunghezze d onda. Tutti gli altri corpi avranno invece un valore di ε ed α minori di 1 in quanto ε può essere definito come il rapporto fra il flusso di energia radiante Φe emessa da una superficie reale posta ad una certa temperatura T e quello Φcn emesso da una superficie di corpo nero posta alla stessa temperatura. Per cui: ε = Φe / Φcn. Le leggi per i corpi reali. In certe condizioni ed a determinate lunghezze d onda, anche l acqua del mare o un laghetto di montagna si comportano come corpi neri: di giorno assorbono energia solare mentre di notte la riemettono sotto forma di calore. Considerato quanto appena descritto, le leggi di Planck e di Stefan-Boltzman, nel caso di superfici reali, andranno riscritte considerando per ognuna il valore dell emissività del corpo, indicato dal valore di ε. 2.5 Le sorgenti naturali di energia: il Sole e la Terra Ogni superficie fisica che si trovi a una temperatura T superiore allo 0 K Kelvin (equivalente ad una temperatura di 273,14 C) emette energia sotto forma di radiazione elettromagnetica. Le sorgenti di energia che maggiormente regolano i fenomeni naturali che ci circondano sono la Terra ed il Sole. Dal punto di vista dell irraggiamento, dunque, queste due sorgenti si comportano in modo assai diverso a causa della loro diversa temperatura. Bisogna però ricordare che la superficie terrestre subisce l interazione con l energia solare che incide su di essa. L energia del sole viene assorbita dalle piante, per la fotosintesi, si trasmette all interno dei corpi idrici dei mari e dei laghi, dove viene assorbita, e si trasforma in calore, oppure viene riflessa dai corpi. Questi fenomeni di assorbimento, trasmissione e riflessione variano in funzione delle caratteristiche della superficie terrestre. Se vogliamo adesso usare uno strumento per misurare l energia emessa dalla Terra dovremo allora stare attenti a non comprendere nella nostra 18
66 misura, l energia riflessa dal Sole, e viceversa. Per la legge di Wien, Sole e Terra hanno due massimi di emissione molto diversi, rispettivamente di 9,66μm e di 0,483μm. Nonostante i massimi di emissione delle due sorgenti siano molti diversi, bisogna ricordare che, secondo la legge di Planck, il Sole emette lungo tutto lo spettro. Esiste perciò una banda, fra i 3 ed i 7μm di lunghezza d onda, chiamata IR medio, in cui si verifica una certa ambiguità: l energia infrarossa mediamente emessa dalle superfici naturali è qui confrontabile con quella solare mediamente riflessa dalle medesime: un rilievo effettuato in questa banda necessita quindi di una interpretazione più accurata per distinguere se l energia misurata corrisponda a quella solare riflessa o a quella emessa dalla Terra. In conclusione, i nostri occhi osservano per lo più il risultato dell energia riflessa dal Sole o da altre sorgenti di illuminazione artificiale (ad esempio una lampada o un flash), oppure quella emessa da altri corpi posti ad alte temperature (stelle, corpi incandescenti), il cui spettro cade parzialmente o totalmente nella regione del visibile. Mentre l energia emessa da altri corpi a temperatura ambiente risulta invece assolutamente invisibile, cadendo completamente, o per lo più, nelle regioni dell infrarosso. 2.6 I fenomeni di interazione elettromagnetica Quando si passa dai modelli fisici descritti dalle leggi riportante nel paragrafo precedente al mondo reale osservato attraverso gli strumenti del Telerilevamento, bisogna tener conto di due fenomeni che interagiscono con la radiazione elettromagnetica: l influenza dell atmosfera, che è il mezzo che la radiazione elettromagnetica attraversa durante il suo percorso dalla sorgente al sensore, e il comportamento delle superfici naturali che, come vedremo più avanti, possono riflettere, assorbire o trasmettere la radiazione Influenza dell atmosfera L atmosfera è di particolare interesse in Telerilevamento, in quanto è il mezzo attraverso cui l energia elettromagnetica viaggia nel suo percorso dalla sorgente al bersaglio e quindi al sensore. Lo studio della sua composizione e della sua interazione con la radiazione elettromagnetica è dunque di fondamentale importanza, perché da esso dipende una corretta interpretazione del dato. Le particelle solide o liquide sospese nell aria (gas e aerosol), ad esempio, assorbono e diffondono le onde elettromagnetiche modulando ed alterando il segnale che raggiunge il sensore rispetto alla radianza originale proveniente dal bersaglio oggetto di studio. Tale fenomeno (effetto atmosferico) evidentemente influenza e modifica l informazione rilevata, per cui occorrono specifici procedimenti di correzione e modelli interpretativi per ricondurre il dato ad un margine più sicuro di attendibilità. 19
67 I gas atmosferici, gli aerosol ed i vapori interagiscono differentemente con la radiazione solare, mettendo in campo due comportamenti principali: l assorbimento che riduce la quantità di energia incidente e la diffusione (scattering) che, al contrario, ridistribuisce la radiazione in arrivo cambiandone la direzione di propagazione. Figura 7: I principali fenomeni di interazione della radiazione solare con l atmosfera: assorbimento e diffusione L assorbimento Il fenomeno di assorbimento riguarda soprattutto i gas presenti nell atmosfera: il vapore acqueo, l anidride carbonica, l ossigeno e l ozono. Esistono alcune regioni dello spettro elettromagnetico, dette finestre atmosferiche, dove la radiazione viene trasmessa meglio che altrove, e dove le caratteristiche dei gas permettono il passaggio della radiazione. Le finestre di trasparenza più importanti sono quelle del visibile (0,4 0,7 mm), dell infrarosso vicino (0,7 1,3 mm; 1,5 1,8 mm; 2 2,6 mm), dell infrarosso medio (3 5 mm), dell infrarosso termico (8 14 mm) e, infine, quella delle microonde (1 mm 1 m). La conoscenza delle finestre di trasparenza dell atmosfera si rivela fondamentale quando si devono studiare dei fenomeni particolari e quando occorre definire le caratteristiche dei sensori, per progettare gli strumenti di osservazione e misura. 20
68 Figura 8: Gli assorbimenti selettivi delle molecole dei vari gas e composti presenti nell'atmosfera definiscono delle "finestre" ottimali per la trasmissione dell'energia elettromagnetica La diffusione La diffusione (o scattering) si ha quando la radiazione, nell impatto con le particelle costituenti l atmosfera, viene deviata in modo differente nelle varie direzioni. La modalità di diffusione dipende da molti fattori, tra cui la lunghezza d onda della radiazione incidente, la quantità di particelle o gas presenti nell atmosfera e la distanza che la radiazione percorre attraverso l atmosfera. In generale, la diffusione è responsabile dell effetto foschia e delle diverse colorazioni del cielo. Questi effetti sono più evidenti nel visibile e nell infrarosso, mentre sono praticamente trascurabili nel dominio delle microonde La diffusione di Rayleigh Il fenomeno di diffusione più comune è quello cosiddetto di Rayleigh (in riferimento alla omonima legge fisica) che si verifica quando le particelle sono più piccole della lunghezza d onda della radiazione. Più corta è la lunghezza d onda, maggiore sarà la quantità di radiazione diffusa. Questo fenomeno determina effetti diversi ed è 21
69 responsabile delle svariate colorazioni che può assumere il cielo nelle varie giornate o in diversi momenti della stessa giornata. Figura 9: Il tramonto ha una tipica colorazione dovuta alla diffusione delle lunghezze d onda maggiori che percorrono una grande distanza dalla fonte di energia. Il colore azzurro del cielo di mattina, ad esempio è dovuto al fatto che l energia solare a lunghezze d onda corta (vicine al blu) viene diffusa in maniera maggiore rispetto a quelle d onda lunga, come ad esempio il rosso, come previsto dalla legge di Rayleigh. Lo stesso fenomeno spiega il colore rosso del cielo all alba e viola al tramonto (figura 9): in tali situazioni i raggi del Sole raggiungono la superficie terrestre dopo aver attraversato uno spessore d atmosfera molto grande. Pertanto l energia che raggiunge l osservatore è solo quella nelle sue componenti a lunghezza d onda maggiore che subiscono meno il fenomeno della diffusione La diffusione di Mie La diffusione di Mie si ha invece quando la lunghezza d onda della radiazione incidente è delle stesse dimensioni delle particelle incontrate. Essa tende a influenzare le lunghezze d onda più lunghe nel visibile, dal giallo al rosso, e in situazioni del tutto particolari. Esempi di questo meccanismo sono i fumi e le polveri nella bassa atmosfera che provocano foschia, di solito giallastra, come succede spesso nei cieli delle aree fortemente industrializzate e popolate. Figura 10: I fumi che fuoriescono da una ciminiera industriale (a) e le nuvole (b) sono due esempi dei complessi fenomeni di diffusione che avvengono nell atmosfera. 22
70 2.6.6 La diffusione non-selettiva La diffusione non-selettiva è così chiamata perché influenza quasi allo stesso modo tutto il visibile, l infrarosso vicino e l infrarosso medio. Essa si verifica quando le particelle dell atmosfera, in particolare le goccioline d acqua e le polveri, dell ordine del micron e oltre, sono molto più grandi delle lunghezze d onda della radiazione con cui interagiscono. Il fenomeno è responsabile dell aspetto bianco lattiginoso in cui appare il cielo in presenza di nebbia e nuvole (figura 10). Se non vi fosse il fenomeno della diffusione, il cielo apparirebbe nero come effettivamente è nello spazio extra-atmosferico, dove il vuoto, cioè l assenza di particelle, impedisce qualunque tipo di interazione. 2.7 L interazione delle radiazione con le superfici naturali Quando la radiazione elettromagnetica, dopo aver attraversato l atmosfera, colpisce una superficie, a seconda della natura fisica e del grado di rugosità di questa, sono possibili tre meccanismi di interazione: una parte del flusso radiante incidente Φi viene riflessa Φr, una parte viene assorbita Φa, e infine la restante viene trasmessa Φt. In Telerilevamento questi meccanismi vengono descritti con dei coefficienti specifici detti rispettivamente: Coefficiente di riflessione o riflettività ρ = Φr / Φi Coefficiente di assorbimento o assorbività α = Φa / Φi Coefficiente di trasmissione o trasmissività τ = Φt / Φi esprimibili, per il principio di conservazione dell energia, nella semplice relazione: Solo un corpo nero, o radiatore integrale, presenta una condizione ideale dove tutta la radiazione incidente Φi viene assorbita e poi trasformata in energia emessa Φe, per questo corpo τ e ρ saranno uguali a zero ovvero l energia non verrà trasmessa né riflessa in ogni lunghezza d onda. Nel caso di corpi opachi, e cioè per la gran parte delle superfici naturali, τ risulta generalmente trascurabile. Se poniamo ad esempio un oggetto davanti al Sole, questo ci schermerà dalla luce proiettando un ombra nella regione di influenza, e quindi la relazione precedente si semplifica nella seguente: α+ρ=1 Dalla legge di Kirchhoff si è visto come l energia assorbita viene poi riemessa per cui, sostituendo α con il valore dell emissività ε, si ha anche che: 23
71 ε+ρ=1 Per comprendere meglio questo fenomeno, basta ricordare ciò che accade ad un automobile di colore nero che rimane esposta per un intera giornata al rovente sole estivo. A causa del suo colore scuro, l auto riflette poca luce e quindi assorbe tanta energia solare riemettendola sotto forma di calore La riflessione Il fenomeno della riflessione dipende dalla natura e dalla rugosità della superficie rispetto alla lunghezza d onda incidente. Si può avere una riflessione speculare, per cui un oggetto liscio riflette tutta l energia in una direzione precisa che è definita dall assetto geometrico della superficie, o una riflessione diffusa, nel caso di una superficie rugosa dove l energia viene più o meno uniformemente riflessa in tutte le direzioni. In questo ultimo caso, si parla allora di superfici lambertiane. La maggior parte delle superfici ha un comportamento intermedio fra i due estremi, e la riflessione diffusa è responsabile del colore dei corpi naturali che osserviamo tutti i giorni: ad esempio, il verde delle foglie degli alberi, il rosso o il giallo dei fiori. Figura 11: Il colore verde delle foglie dipende dalla maggiore riflettività nel verde rispetto alle altre lunghezze d onda del visibile La trasmissione Questo fenomeno interessa, come dice la parola, i corpi che mostrano un accentuato valore di trasmissività, come l acqua e l atmosfera, oltre a materiali artificiali come il vetro. Il caso del vetro è interessante anche per mostrare come la trasmissione possa essere rilevante in certe lunghezze d onda, e non in altre: tale materiale è infatti assolutamente trasparente nel visibile, ma nel contempo assolutamente opaco 24
72 nell infrarosso, per cui risulta un ottimo isolante termico. Uno degli effetti di questo fenomeno è il riscaldamento che si ottiene in una serra per i fiori (vedi figura 12). Figura 12: L effetto serra non è altro che un processo naturale dovuto al diverso comportamento di alcuni gas atmosferici nei confronti della radiazione: trasparenti ad onde corte e schermanti a onde lunghe. Il vetro permette la trasmissione dell energia ad onde corte, che viene prima assorbita all interno e poi riemessa sotto forma di onde lunghe; queste, non riuscendo più a liberarsi verso l esterno, determinano un aumento progressivo della temperatura dell ambiente interno alla serra. L acqua, invece, è trasparente solo alle lunghezze d onda più corte della porzione del visibile dello spettro (luce, blu, verde), mentre assorbe le lunghezze d onda più lunghe dal rosso all infrarosso. Per questa ragione solo le lunghezze d onda corte del blu raggiungono la profondità dei corpi idrici L emissione In Telerilevamento si fissa attorno a 3μm il limite superiore della porzione di energia solare riflessa dalla superficie terrestre rilevabile, che è anche il limite tra l infrarosso medio e vicino, come visto in precedenza. Oltre questa soglia e fino a 14μm l energia rilevabile è prodotta essenzialmente dal fenomeno dell emissione. In particolare, nella regione tra 8 e 14μm, si rileva essenzialmente l energia emessa dai corpi a temperatura ambiente (15-23 C). Un esempio di applicazione in Telerilevamento basata sulla misurazione dell energia emessa da corpi o superfici è la termografia, in quanto permette di registrare valori di temperatura ed emissività. 25
73 Figura 13: Le due immagini (a) riprendono due abitazioni simili; le immagini sottostanti (b) sono ottenute attraverso termografia ed evidenziano le differenze delle due abitazioni dal punto di vista termico; nella casa di sinistra la temperatura è superiore per la mancanza del rivestimento isolante; in quella di destra la presenza del rivestimento determina temperature inferiori. 2.8 La firma spettrale delle superfici Gli accenni alla fisica delle onde elettromagnetiche dei paragrafi precedenti ci hanno aiutato ad intuire che ogni superficie, a seconda delle proprietà fisiche, delle caratteristiche della radiazione incidente e di altri fattori, riemette, assorbe o riflette le radiazioni elettromagnetiche in maniera diversa nelle varie lunghezza d onda. Si tratta di un comportamento così caratteristico da rappresentare un impronta digitale di una superficie, una vera e propria firma di tale oggetto, che viene perciò chiamata firma spettrale. Così, osservando l energia riflessa nelle varie lunghezze d onda se ne ricava una curva di riflettività, detta appunto firma spettrale di riflettività, che permette di distinguere una superficie dalle altre superfici o corpi che hanno comportamenti diversi. Ovviamente la firma spettrale interessa anche regioni poste oltre il visibile, come l infrarosso. Prendiamo ad esempio l andamento di risposta spettrale della vegetazione: se i nostri occhi fossero in grado di vedere l energia infrarossa, gli alberi e le loro foglie ci apparirebbero di un colore infrarosso piuttosto che verde, essendo il valore di ρ nell infrarosso molto maggiore che nelle altre lunghezze d onda, incluso il verde, come si può vedere in figura 14. Figura 14: Le firme spettrali di riflessione delle categorie più significative del paesaggio: la vegetazione (a), l acqua (b), i suoli nudi. Come detto, tutte le superfici naturali hanno comportamenti variabili nei confronti della radiazione incidente a seconda del loro stato e delle loro caratteristiche. Questo principio è alla base delle tecniche e dei metodi sviluppati dal Telerilevamento per il loro riconoscimento. Esaminando il comportamento spettrale standard di alcune 26
74 superfici, che si ottengono da misurazioni spettrali, si può distinguere, ad esempio, la neve dal ghiaccio, o l acqua dalla vegetazione. Vediamo nei paragrafi successivi qual è il comportamento rispetto alla radiazione elettromagnetica delle principali superfici La vegetazione La curva di riflettanza della vegetazione può variare in funzione di molti fattori, quali il tipo di vegetazione e la sua densità, lo stadio fenologico, il contenuto di acqua. La clorofilla, un pigmento presente nelle cellule vegetali, assorbe ai fini della fotosintesi la radiazione visibile blu e rossa, riflettendo invece quella verde. Le foglie ci appaiono più verdi in estate quando il contenuto di clorofilla è molto alto. In autunno la clorofilla è presente in quantità minori, quindi il fenomeno di assorbimento delle radiazioni rossa e blu diminuisce, mentre aumenta quello della riflessione in tutto l intervallo del visibile, facendo apparire le foglie secche rosse o gialle (il giallo è la combinazione di radiazioni verdi e rosse). La struttura interna della foglia invece influisce sulla riflessione della radiazione infrarossa nell intervallo compreso tra 0,7 e 1,35mm: nell infrarosso vicino una foglia sana in questa porzione dello spettro elettromagnetico si comporta da alto riflettore di energia (50% - 70%). La misura e il monitoraggio della quantità di energia riflessa nell intervallo dell infrarosso vicino viene perciò usata per determinare lo stato di salute della vegetazione. Tra 1,35 e 2,70 mm, invece, le proprietà spettrali della vegetazione dipendono strettamente dal contenuto in acqua della foglia. In condizioni di stress idrico, si ha un innalzamento dei valori di radiazione riflessa, più contrastato in alcune bande di assorbimento tipicamente le stesse di assorbimento del vapore acqueo nell atmosfera. Figura 15: Il colore delle foglie di alcuni alberi descrive perfettamente lo spettro di riflessione dal verde al rosso, in relazione alla concentrazione della clorofilla presente e quindi all efficienza del processo di sintesi L acqua Fra gli ambienti che è possibile riconoscere grazie agli strumenti del Telerilevamento l acqua, nei suoi vari stati (gassoso, liquido e solido) riveste senza dubbio un ruolo particolare. 27
75 Ciò in base al suo particolare comportamento spettrale che generalmente contrasta con gli altri elementi del paesaggio al contorno. Ed anche perché questo elemento, insieme all atmosfera, non è propriamente un corpo opaco, almeno per le bande del visibile; al contrario il coefficiente di trasmissività τ per un corpo idrico è piuttosto elevato, almeno per i primi metri di spessore, che vengono perciò definiti zona eufotica o di penetrazione della luce. Se consideriamo un flusso radiante che penetra in acqua, si hanno gli stessi fenomeni di interazione già descritti per l atmosfera, principalmente di trasmissione e di diffusione (o scattering), mentre la riflessione è normalmente molto bassa: questo comportamento varia in funzione dei diversi componenti presenti. L acqua pura è perfettamente trasparente nel visibile, anche se in natura non esiste, presentandosi invece in combinazione con varie sostanze, fra cui alcune sono maggiormente responsabili della risposta radiometrica misurata. Un ruolo particolare è svolto dalla presenza di particelle più o meno fini in sospensione fra cui: la clorofilla, il carico sospeso inorganico e organico, il fitoplancton. La risposta spettrale dell acqua varia con la lunghezza d onda: l acqua limpida assorbe maggiormente le radiazioni più lunghe del visibile e dell infrarosso, mentre diffonde le lunghezze d onda più corte; per questo motivo l acqua ci appare blu o blu-verde, avendo il valore massimo di trasmissività a 450 nm, nel blu. Usualmente l acqua in condizioni di purezza, riflette fino ad un massimo che può raggiungere il 5% dell energia incidente, valore che, rispetto alle normali superfici opache, risulta estremamente piccolo. Se invece si potesse osservare uno specchio d acqua colpito solo da radiazione incidente rossa o infrarossa, esso apparirebbe scuro, in quanto tali lunghezze d onda vengono totalmente assorbite. Quando nell acqua è presente sedimento sospeso, come ad esempio, nei fiumi in piena, la diffusione aumenta anche per lunghezze d onda maggiori inducendo una colorazione giallo-rossastra; in presenza di forti concentrazioni saline per lo stesso motivo, la colorazione tende al rosa. Infine, nel caso di corpi d acqua poco profondi il colore dell acqua è determinato anche dal contributo di riflessione del fondale. Figura 16: Il colore dell acqua dipende dalla sua composizione e dalla combinazione di trasmissione e riflessione rispetto a diverse componenti: il fondo (c), il corpo idrico (b), la superficie (c). 28
76 2.8.3 Il Suolo La riflettanza dei suoli dipende dalla loro composizione chimica e fisica, che ne determina il colore superficiale, utile indicatore del tipo di suolo e delle sue proprietà. Il suolo presenta caratteri specifici legati alla sua natura ed origine e a fattori ambientali che ne influenzano la composizione. Dal punto di vista spettrale le caratteristiche del suolo più interessanti dipendono dal contenuto in sostanza organica, ossidi di ferro, sali e carbonati, umidità, tessitura e struttura. Tali caratteristiche modificano la risposta del suolo singolarmente oppure in sinergia. Infatti mentre alcuni fattori, come l humus o i carbonati, influenzano direttamente il colore del suolo, gli altri parametri non incidono sul comportamento spettrale, bensì sull intensità del dato telerilevato. Ciò che si deduce osservando il grafico relativo alla risposta spettrale generica dei suoli è che la loro riflettanza aumenta all aumentare della lunghezza d onda e presenta delle diminuzioni proporzionali al contenuto di umidità in corrispondenza delle lunghezze d onda di assorbimento dell acqua (1,4, 1,9 e 2,7 mm). Un suolo umido ha in generale una riflettanza più bassa rispetto ad un suolo asciutto. Figura 17: Il colore del suolo dipende da vari fattori quale la composizione chimica e fisica, il tasso di umidità, la tessitura e la struttura. 2.9 Il colore: misure quantitative nel telerilevamento L occhio, sensore naturale dell uomo, utilizza il colore come uno dei fattori chiave del riconoscimento. Allo stesso modo, anche i sensori artificiali usati nel Telerilevamento usano il colore, inteso come il risultato della radiazione emessa o riflessa dalle superfici, quale informazione sulle loro caratteristiche. Anche se il colore rilevato dai sensori va oltre il limitato spettro del visibile del nostro occhio. 29
77 2.9.1 Percezione soggettiva del colore Quando proviamo a definire un colore riportiamo una interpretazione soggettiva di una percezione. Per esempio se provassimo a chiedere ad un gruppo di persone il colore del cielo durante uno spettacolare tramonto sul mare, riceveremo un enorme variabilità di risposte. Questo può essere dovuto ad una serie innumerevole di variabili, quali per esempio lingua diversa, diottrie differenti, ecc Per capire il perché, forse può essere utile spiegare la differenza tra sensazione e percezione. La sensazione è un processo mediante il quale il nostro organismo riceve energia fisica dall ambiente esterno (calore, freddo, ecc.). Si tratta di un processo passivo che avviene nell organo di senso (nel caso della luce, l occhio) e non presuppone necessariamente il coinvolgimento consapevole del soggetto. La percezione è invece il processo con cui organizziamo e interpretiamo la sensazione; è un processo attivo che avviene nel cervello coinvolgendo anche l esperienza, l emotività e lo stato d animo del momento. Tornando al tramonto al mare, dunque, la risposta non poteva essere che varia, perché la percezione visiva avviene grazie al sistema cervello-occhio, un sistema comune a tutti gli esseri umani, ma condizionato da limiti di natura fisiologica e psicologica Il sistema occhio-cervello Il funzionamento dell occhio umano può essere paragonato a quello di una macchina fotografica, anche se sarebbe più corretto dire l inverso. La cornea e il cristallino fungono da lenti naturali: in mezzo ad esse si trova l iride, il cui colore determina proprio la diversa colorazione degli occhi. Al centro dell iride la pupilla, che ha la stessa funzione del diaframma in una macchina fotografica, si stringe e si dilata a seconda dell intensità di luce che la colpisce. Figura 18: Schema dell occhio umano. Sono messe in evidenza le componenti principali, quali la parte ottica (cristallino, iride, asse ottico), sensoriale (retina e fovea) e di trasmissione (nervi ottici). Si noti anche la diversa densità di distribuzione dei fotorecettori (coni e bastoncelli) rispetto alla posizione della fovea. 30
78 La funzione del cristallino è quella di far convergere i raggi luminosi (immagini) sulla retina, così come avviene sulla pellicola di una macchina fotografica. La retina riveste quasi tutta la parte interna dell occhio formata da milioni di cellule, detti fotorecettori, sensibili alla luce, che effettuano la trasformazione degli stimoli visivi in impulsi elettrici, che poi raggiungono il cervello attraverso il nervo ottico. I fotorecettori presenti sulla retina sono divisi in coni e bastoncelli. I coni si trovano prevalentemente al centro della retina e consentono la visione diurna, adattandosi meglio alla luce e percependo meglio i colori. I coni ricettori, tipicamente attivi durante il giorno e responsabili della visione cromatica, sono distinti in tre famiglie specializzate a percepire radianze spettralmente diverse, con picchi di sensibilità rispettivamente a: 440 nm per le piccole-medie lunghezze d onda (blu) 540 nm per le medie (verde) 580 nm (giallo-rosso) per quelle medio-lunghe I bastoncelli sono prevalentemente alla periferia e permettono la visione notturna, essendo molto più sensibili alla luce rispetto ai coni. La parte centrale della retina (detta macula) è responsabile della visione centrale, permette cioè di distinguere i dettagli delle immagini. Al suo centro c è la fovea responsabile della percezione dei dettagli più piccoli, in quanto caratterizzata da un altissima concentrazione di coni. Il segnale luminoso colpisce i fotorecettori e, attraverso una trasmissione complessa degli stimoli, passa al nervo ottico. I due nervi ottici, provenienti rispettivamente dall occhio destro e sinistro, si incontrano poi nel chiasma ottico dove ognuno di essi si divide in due parti, separando le rispettive informazioni della metà destra e della metà sinistra del campo visivo. Le due metà dei nervi ottici contenenti le informazioni della parte destra si uniscono e procedono per trasmettere le informazioni alla parte sinistra della corteccia cerebrale deputata alla visione. L intero processo, in forma simmetrica, si ripete per la parte sinistra del campo di vista che sarà quindi trasmessa alla parte destra della corteccia cerebrale. Le informazioni luminose così veicolate sotto forma di impulsi nervosi al cervello vengono finalmente lette ed interpretate in termini di posizione nello spazio, tinta, intensità e saturazione cromatica. 31
79 Figura 19: Confronto delle diverse sensibilità dei fotorecettori dell occhio umano nei tre colori fondamentali blu, verde e rosso. Rappresentazione oggettiva del colore. Studiando il funzionamento del sistema cervello-occhio abbiamo compreso i meccanismi funzionali della visione e i limiti di natura psicofisiologica insiti nella percezione visiva. Ma spesso ci troviamo di fronte alla necessità di descrivere oggettivamente, cioè in modo univoco e quantitativo, ciò che avvertiamo come percezioni cromatiche. Quando andiamo, ad esempio, a comprare una vernice per tinteggiare le pareti di casa, o a scegliere il colore per il tessuto del nuovo divano. Per risolvere questo problema, noi oggi ricorriamo a campionari dei colori che sono stati definiti nel corso degli anni sulla base di caratteristiche oggettive. Sintesi additiva e sintesi sottrattiva. Studi sperimentali sulla fisiologia dell occhio umano hanno mostrato come, a partire dalla sensibilità dell occhio alle diverse radiazioni dello spettro elettromagnetico, sia possibile riprodurre tutti i colori percepibili combinando tra loro tre colori primari: il blu, il verde e il rosso. Il processo di tale combinazione è stato chiamato sintesi additiva. Provando a proiettare questi colori primari a coppie su di uno schermo bianco, si nota che essi producono, rispettivamente, altri tre colori: ciano, magenta e giallo, definiti colori complementari. Ma questi colori si possono ottenere anche per sottrazione di un colore primario dalla luce bianca (sintesi sottrattiva). Il meccanismo di combinazione dei colori è stato espresso scientificamente nella teoria di Young-Helmoltz, detta anche delle componenti o di tricromaticità. Esso è alla base della rappresentazione dei colori in molti ambiti quotidiani, ed è alla base dei principali dispositivi di riproduzione visiva: monitor, tv e stampanti. Misurazione del colore. Si è visto come fenomeno del tutto soggettivo influenzato emotiva del momento. Per superare perciò umana e per fornire i dati fondamentali la percezione umana del colore sia un da molti fattori, tra cui la condizione il limite della soggettività della visione per la riproduzione delle immagini è 32
80 necessario possedere strumenti in grado di misurare il colore ovvero l energia elettromagnetica che proviene da una determinata superficie alle diverse lunghezze d onda. Per capire come funzionano gli strumenti del Telerilevamento, ripercorriamo l esperienza che ha permesso di scoprire l esistenza della luce Ultravioletta e dell Infrarosso. Usando un prisma di Newton, siamo in grado di separare la luce bianca proveniente dal Sole nelle sue componenti monocromatiche corrispondenti ai colori dello spettro del visibile che vanno dal blu al rosso in rapporto alla diversa lunghezza d onda. Questa operazione è esattamente quello che fanno i vari sensori usati nel Telerilevamento, che sono provvisti di filtri monocromatici in grado di selezionare solo alcune regioni dello spettro. Figura 20: Esempio dell esperimento condotto da Newton nel La luce bianca è scomposta nei diversi colori dello spettro al passaggio attraverso il prisma. A questo punto se poniamo dei termometri a distanza regolati lungo il piano dove viene scomposta la luce, potremo misurare l energia che accompagna le diverse lunghezze d onda lungo l arcobaleno creato dal prisma. Se poniamo i termometri anche prima del blu e dopo il rosso, misureremo così anche l energia rispettivamente dell ultravioletto e dell infrarosso. Al posto dei termometri, negli strumenti del Telerilevamento si usano sensori sofisticati in grado di convertire in segnale elettrico la radiazione che li colpisce, ma il principio è lo stesso. Per misurare i colori, ma anche la radiazione oltre il visibile è necessario prima scomporre la luce e poi quantificare l intensità della radiazione per la porzione spettrale di interesse. 33
81 Figura 21: Posizionando dei termometri alle estremità dello spettro del visibile è possibile misurare l energia di colori che non vediamo, cioè l ultravioletto e l infrarosso. 3 Strumenti e dati del telerilevamento Nel corso della sua storia, l uomo ha sempre cercato nuovi modi per superare i suoi limiti naturali di osservazione e di percezione visiva, per riuscire a scrutare oltre il muro, la collina, la montagna. Il Telerilevamento (TLR) può essere considerato una tappa di questo cammino dell uomo verso una visione più completa e complessiva dell ambiente in cui vive. Sfruttando le conoscenze dei fenomeni d interazione tra energia elettromagnetica e superfici naturali, tale disciplina permette di abbracciare con un solo sguardo vaste aree di territorio e di rappresentarlo su piccola scala attraverso immagini e mappe estremamente dettagliate, che si rivelano utili per moltissimi scopi. Tutto ciò è possibile, in particolare, grazie all uso di piattaforme (come aerei o satelliti) che consentono di riprendere a distanza più o meno ravvicinata il territorio, e di sensori che ne scrutano le caratteristiche e le condizioni. 3.1 Caratteristiche e peculiarità del telerilevamento Visione a distanza. Il TLR consente di riprendere a distanza vasti territori, anche quelli posti in zone remote ed inaccessibili (ad esempio, i ghiacciai, i deserti); senza un contatto diretto ed un intervento invasivo su essi (si pensi alla possibilità di controllare lo stato di salute di una foresta senza dover raccogliere campioni delle sue foglie). Misura con i sensori. Il TLR fa uso di sensori che permettono di vedere cose che ad occhio nudo non saremmo in grado di distinguere, discriminando in un immagine un 34
82 gran numero di elementi (suolo, vegetazione, acqua, ecc.) e riconoscendo le loro caratteristiche (umidità, stato di salute, concentrazione dei nutrienti, ecc.). Ripresa sinottica. La ripresa a distanza offre una prospettiva di visione di estese porzioni di territori: possiamo così seguire il percorso di un fiume che attraversa vari paesi; osservare la diversa distribuzione delle colture agricole in territori differenti; controllare la diffusione degli incendi di un intero continente o monitorare le condizioni di vaste distese oceaniche. Ripresa multispettrale. La visione a colori dell uomo è limitata perché permette di osservare solo una piccola parte del comportamento spettrale degli oggetti che avviene sempre lungo tutto lo spettro elettromagnetico. Il telerilevamento, invece, osserva il comportamento delle superfici in varie porzioni dello spettro, riprese dalle bande dei sensori, riuscendo così a distinguere in un territorio tipologie e stato delle superfici e degli oggetti che lo compongono. Ripresa multi temporale. Infine, le tecniche di telerilevamento consentono di riprendere la stessa scena ad intervalli di tempo diversi e regolari. Questo è particolarmente interessante se si è interessati a monitorare fenomeni naturali con un andamento dinamico, come l evoluzione meteorologica, lo scioglimento dei ghiacciai, il ciclo vegetativo delle colture, o fenomeni devastanti connessi all attività umana, come la deforestazione di alcune aree del pianeta. Uno degli aspetti più importanti che fanno del Telerilevamento uno strumento utile per il monitoraggio dell ambiente e del territorio è la possibilità di effettuare riprese multiple, ovvero con diverse risoluzioni spaziali, con differenti caratteristiche spettrali e di acquisire i dati in momenti diversi. Combinando insieme i diversi strumenti, sensori e mezzi è possibile realizzare un monitoraggio dell ambiente e del territorio che ne riesca a cogliere tutta la complessità Le piattaforme per la ripresa a distanza A seconda della distanza e delle caratteristiche dello strumento è possibile indagare differenti aspetti legati al territorio. Gli strumenti del Telerilevamento vengono montati su apposite piattaforme che in funzione della prospettiva e della quota di osservazione vengono distinte in: piattaforme da terra, da aereo da satellite. Piattaforme da terra. Gli strumenti di questa piattaforma sono vincolati alla superficie terrestre. In genere si ricorre alla ripresa a distanza da terra sia per ottenere informazioni spettrali estremamente dettagliate e inerenti piccole porzioni di territorio sia per tarare e calibrare i dati acquisiti con altre piattaforme, ad esempio per correggere l effetto dell atmosfera nelle immagini riprese da aereo o da satellite. Esempi di piattaforme a terra sono veicoli con braccio mobile, torri metalliche o cavalletti. Piattaforme aeree. Le riprese aeree vengono eseguite da quote variabili comprese tra i 300 e i metri e con strumentazioni diverse in funzione delle finalità del 35
83 volo e delle caratteristiche delle aree da rilevare. Esse consentono di acquisire immagini ad alta risoluzione a terra (da 5 a 100 centimetri) per il colore (RGB), falso colore e pancromatico e, a risoluzione leggermente inferiore, (da 100 a 200 centimetri) usando i sensori multispettrali. Grazie a queste riprese è possibile ottenere una visione stereoscopica (3D) del territorio che permette di produrre accurate cartografie ed eseguire precise misure altimetriche e plano-altimetriche. Sugli aerei è possibile montare diversi sensori contemporaneamente (camere da ripresa fotogrammetriche, analogiche o digitali, sensori multispettrale, laser altimetrici, ecc.) ottenendo così una più dettagliata indagine del territorio. Inoltre, grazie ai moderni sistemi GPS-inerziali è possibile una georeferenziazione diretta dei dati e delle immagini acquisite. L accurata programmazione dei sorvoli aerei in relazione alle caratteristiche delle aree di interesse, che possono essere anche limitate e molto eterogenee, offre poi la possibilità di scegliere il momento più opportuno per l acquisizione delle immagini. È interessante ricordare che dal 2000 le immagini riprese da piattaforma aerea non sono più soggette al controllo di riservatezza militare per cui rappresentano il territorio nella sua interezza senza mascherare alcuna area. Figura 22: Piattaforma aerea per il telerilevamento. Piattaforme aeree leggere a pilotaggio remoto e autonome. Da qualche anno stanno prendendo piede delle nuove piattaforme aeree leggere per i rilievi di prossimità, tali piattaforme sono note con diversi acronimi o definizioni, come UAV (Unmanned Aerial Vehicle), APR (Aeromobile a pilotaggio remoto) o più semplicemente droni. Questi dispositivi inizialmente sviluppati per scopi militari, stanno trovando nell ultimo periodo grande diffusione anche in ambito civile, in particolare lo sviluppo tecnologico nell ambito della sensoristica permette di equipaggiare gli APR con dispositivi in grado di indagare il territorio nell ambito dello spettro visibile, dell infrarosso con camere termiche, attraverso l uso di camere multispettrali o con dispositivi più evoluti come i sensori Lidar. 36
84 Figura 23: Esempio di droni ad ala fissa e rotante multipla. E da notare come gli APR per uso civile siano di dimensione estremamente ridotte, rispetto ai più noti cugini per uso militare, e quindi sono in grado di montare sensori a bordo nell ordine di peso non superiore a qualche kg. I droni UAV e soprattutto i micro-uav (che pesano meno di due kg) rappresentano l ultima frontiera per la ripresa del territorio ad alta risoluzione e a bassa quota di volo. Potendo montare diversi sensori, i velivoli senza pilota possono essere utilizzati anche in ambito urbano, per effettuare analisi di rischio ambientale, stime di cambiamenti del suolo e dell urbanizzato. Rappresentano inoltre una soluzione a basso costo per la creazione di quadri conoscitivi condivisi. I droni possono anche essere impiegati in molteplici situazioni tra cui le ricognizioni per attività delle forze dell ordine, il pattugliamento delle coste e delle acque territoriali e la sorveglianza urbana. Costituiscono un utile strumento per la prevenzione degli incendi boschivi e il monitoraggio di parchi, aree boschive, laghi, fiumi e paludi e delle infrastrutture industriali quali condotte, ponti e impianti di grandi dimensioni, per il rilevamento dei parametri atmosferici e ambientali, e per il controllo dell abusivismo edilizio. Tale tecnologia è impiegabile anche nel campo dell archeologia e dei beni culturali, oltre che per il controllo delle frodi agricole e per la tutela della conservazione ambientale, per realizzare fotografie e riprese aeree (utilizzabili per scopi pubblicitari, cinematografici e commerciali) e fotogrammetrie e rilievi topografici 3D. Piattaforme satellitari. I satelliti artificiali per l osservazione della terra dallo spazio sono impiegati per il monitoraggio ripetitivo e sistematico di grandi estensioni di territorio. Un satellite è un corpo, sia celeste sia artificiale, che ruota attorno ad un pianeta, con una traiettoria detta orbita, dipendente dalla forza d attrazione fra due corpi (gravità) e dalla forza centrifuga. I satelliti artificiali sono lanciati ad una determinata velocità, in funzione del raggiungimento della posizione d equilibrio di queste due forze, in zone dell atmosfera in cui le forze d attrito sono nulle. Esistono ormai un gran numero di satelliti artificiali utilizzati negli studi di Telerilevamento, con caratteristiche tecniche molto differenti (come vedremo più avanti), che riprendono porzioni differenti della superficie terrestre in funzione delle differenti orbite. 37
85 4 Tecnologie e problematiche per il rilievo aereo 4.1 Tecnologie di rilievo aereo Il capitolo integra una panoramica dei sensori, montati a bordo di aeromobili, costruiti per il rilievo e il monitoraggio del territorio e dell ambiente. Molti di questi strumenti hanno forti analogie con quelli utilizzati a bordo di satelliti: si tratta per lo più di sensori attivi o passivi che sfruttano i principi della radiazione elettromagnetica per evidenziare misure e caratteristiche di un oggetto o di un fenomeno. In questo contesto sono quindi evidenziate e descritte soprattutto le differenze, in termini di strumenti e le problematiche inerenti le piattaforme. 38
86 4.1.1 satellitari I sistemi su velivoli e le principali differenze con i sistemi Esistono alcune analogie tra le piattaforme, soprattutto per quanto riguarda gli strumenti che possono essere montati a bordo, per esempio i sensori multispettrali e/o pancromatici, tuttavia sono numerose anche le differenze tra i sistemi. Per questo le due piattaforme sono spesso considerate in competizione, anziché come tecnologie tra loro integrabili. Tra i vantaggi evidenti nell uso di velivoli si può annoverare la possibilità di scegliere l area e la quota di volo, e quindi la possibilità di pianificare una campagna di acquisizione mirata agli oggetti o fenomeni da studiare, con una specifica risoluzione spaziale. Anche la risoluzione temporale è variabile e pianificata, sempre in base all applicazione, in termini di ore del giorno, stagione e condizioni meteorologiche più adatte ad effettuare rilievi. Molti sensori su velivolo sono nati per sperimentare o tarare strumenti da montare su satellite. La NASA per esempio presso il Dryden Flight Research Center ( testa sensori di tipo avanzato, come per esempio sensori di tipo multispettrale, radar ad apertura sintetica, e camere fotogrammetriche di grande formato. Questi strumenti, se alloggiati su satelliti, per la quota dell orbita e per la consistente energia che devono misurare (in termini di quantità, intensità o discretizzazione), non raggiungono le analoghe prestazione rispetto agli stessi strumenti a bordo di aereo. Se la scelta di acquisizione dati ricade su questo tipo di piattaforma sono da tenere in considerazione alcune problematiche che determinano la scelta dello strumento per una specifica applicazione e influenzano il trattamento e l elaborazione dei dati acquisiti. L aereo è infatti una piattaforma instabile, soggetta a movimenti ed oscillazioni. Inoltre per alcune applicazioni avere a disposizione in modo regolare informazioni e poter confrontare serie di dati storiche può essere molto utile, come per l analisi dell espansione urbana, lo studio della desertificazione, ecc. In Italia attualmente poche Amministrazioni, sia a livello locale che nazionale hanno pianificato campagne di voli con scadenze regolari, senza gli sforzi compiuti da diverse società private oggi non si potrebbe disporre di un archivio completo di immagini per l intero territorio nazionale. Si deve infine fare un ulteriore considerazione relativa alle piattaforme: i velivoli attualmente in commercio sono molti e tra loro molto diversi, si possono utilizzare aerei civili e militari, ultraleggeri costruiti ad hoc e omologati per trasportare sensori, elicotteri e aerei unmanned. Ognuno di questi velivoli, varia per caratteristiche tecniche che lo rendono utilizzabile in determinati contesti e applicazioni rispetto ad un altro, nella pianificazione di una campagna di acquisizione di dati la scelta va 39
87 quindi fatta sia sul sensore che sul tipo di velivolo, per qualità, accuratezza e precisione del dato nonché per questioni economiche e logistiche Quota di volo e risoluzione spaziale Risoluzione degli strumenti ottici La risoluzione spaziale dei sensori montati su velivolo dipende dalla quota di volo, ma dipende anche dal tipo di strumento e dalle sue componenti. Nei sistemi ottici, come le camere fotogrammetriche tradizionali, il potere risolvente o risoluzione delle sue componenti: obiettivo, pellicola, strumento, è definito in linee/mm o cicli/mm. E anche possibile utilizzare la misura angolare, in radianti/ciclo, che esprime l angolo sotteso tra il rilevatore del sistema e due oggetti separati dalla distanza minima risolvibile (ciclo). Dalla risoluzione spaziale del sistema è ricavabile la risoluzione al suolo ottenuta dalla formula: Rsu = risoluzione al suolo Rs = potere risolvente del sistema f= lunghezza focale del sistema ottico impiegato H= altezza del sistema di ripresa rispetto al suolo Nel caso di una fotocamera con lunghezza focale f a 152 mm e con potere risolvente della pellicola pari a 80 linee/mm, applicando la formula per una altezza H di metri, la risoluzione al suolo è pari a: Risoluzione degli strumenti elettro-ottici Le camere fotogrammetriche digitali non utilizzano ancora, come nei sistemi tradizionali, centri di presa puntuali, ma un piano focale composto da elementi CCD in linea o a matrice, che scansionano la scena da rilevare, analogamente ai sistemi a scansione alloggiati su satellite. Il rilevamento a scansione opera un campionamento al suolo le cui dimensioni dipendono dal sensore impiegato e dalla distanza fra lo strumento e l oggetto. La risoluzione al suolo è riferibile all IFOV- Istantaneous Field of View, cioè all ampiezza angolare che sottende la superficie proiettata di un singolo elemento del detector. L IFOV può essere espresso come: 40

88 IFOV = a/f in radianti. IFOV = 1/a in linee/mm. cicli/mm o IFOVL= (H/f) * a in m. Con a dimensione del detector. Solitamente nei sistemi a scansione e nelle camere digitali si misura la risoluzione geometrica dell elemento in sottomultipli del m o in dpi Distorsioni e problematiche Le distorsioni presenti nei dati derivati da sistemi su aereo sono dovute principalmente alla geometria di presa e ai movimenti della piattaforma. Nel rilevamento a scansione, soprattutto di tipo push broom esiste un grande problema di distorsione geometrica, al di là dell assetto della piattaforma, che è insito nella struttura del sistema. Infatti alla velocità costante di rotazione dello specchio dello scanner, non corrisponde una proiezione al suolo di IFOV costante: la dimensione del pixel aumenta allontanandosi dal nadir della scansione. Figura 24: angoli di rotazione della piattaforma di ripresa. Inoltre va tenuta presente la limitazione imposta dal tempo di risposta dello strumento, per cui può esserci un certo ritardo nella registrazione di brusche variazioni di radianza della scena. I movimenti che il velivolo subisce durante il volo sono definiti di rollio (roll), beccheggio (pitch) e variazioni dell asse di imbardata (yaw), ovvero rotazioni del velivolo attorno al proprio asse longitudinale, laterale e verticale, rispettivamente. Nelle figure seguenti è mostrata la rappresentazione delle distorsioni sulle immagini. I dati derivati da sensore devono quindi essere corretti geometricamente per essere confrontati o integrati ad altri prodotti cartografici. 41
89 Figura 25: Esempio di distorsione dovuta a movimenti del velivolo Sistema GPS e piattaforma inerziale Per mantenere l informazione geografica delle misure registrate dal sensore e per correggere in fase di post-processamento dei dati le eventuali deformazioni provocate dai movimenti del velivolo è necessario (a volte consigliato, a volte indispensabile) installare a bordo degli aeromobili un sistema integrato GPS e piattaforma inerziale IMU-Inertial Measuring Unit, che permette agli operatori di conoscere in ogni istante le accelerazioni lineari e angolari, quindi gli esatti movimenti del velivolo, e di tenere sotto controllo, in qualsiasi istante di volo, la posizione della piattaforma. L integrazione tra sistema inerziale, composto da accelerometri e giroscopi e il GPS si definisce sistema INS- Inertial Navigation System (IMU, GPS e SW). Solitamente le operazioni di georeferenziazione vengono effettuate attraverso l uso di numerosi punti di controllo sul terreno (GCP - Ground Control Points) ricavati da rilievi topografici terrestri di precisione. Per ottenere dati geo referenziati e con la minima deformazione, è necessario determinare per ogni istante di esposizione i parametri esterni di orientamento del sensore (EOP - Exterior Orientation Parameter). Ciò richiede la determinazione dei parametri interni di orientamento del sensore (IOP- Interior Orientation Parameter). Installando il sistema INS i parametri esterni di orientamento EOP possono essere determinati riducendo i punti di controllo sul terreno GCP. Tale processo viene definito di georeferenziazione diretta. Terminata la fase della ripresa, ed il relativo controllo di qualità dei dati, viene avviato il post-processing: inizialmente viene calcolata l esatta traiettoria dell aereo durante la ripresa, quindi vengono determinate le successive posizioni occupate nel tempo dall'aereo (ovvero dal sensore) in base ai dati del GPS e del sistema inerziale. 42
90 I dati della traiettoria e dell assetto angolare vengono poi combinati con i dati dei sensori sincronizzandoli tra loro. La qualità dei dati in uscita dai sensori dipende quindi anche dal sistema INS, ovvero dalla piattaforma inerziale e dal tipo di ricevitore GPS utilizzato, nonché dai fattori ambientali riscontratisi nella fase di volo Le diverse tipologie di sensori su velivolo I sensori più utilizzati su velivolo sono le camere fotogrammetriche analogiche, le camere digitali a CCD, i sensori termici, i laser scanner, i sistemi radar SAR e i sensori iperspettrali o multispettrali a scansione pushbroom. Gli strumenti a bordo di aeromobili possono essere classificati da diversi punti di vista, che in linea di principio possono coincidere con quelli applicati per i satelliti. a) In base alla fonte di energia: sensori attivi e passivi Gli strumenti passivi rilevano la radiazione elettromagnetica, proveniente dal sole e riflessa od emessa dagli oggetti. Si tratta di strumenti come le camere fotogrammetriche e tutti i sensori multi e iperspettrali. I sensori attivi invece rilevano la risposta riflessa da un oggetto irradiato da una fonte di energia generata artificialmente. I sensori attivi su velivoli sono sia di tipo radar sia sistemi lidar, come i laser scanner, il laser altimetrici e i laser batimetrici. b) In base alla geometria di presa La geometria di presa delle camere fotogrammetriche analogiche è di tipo centrale, i rilevatori nelle camere digitali sono invece sia di tipo puntuale, lineare e a matrice. c) In base all intervallo di lunghezza d onda misurato: sensori ottici, elettro-ottici, termici e a microonde I sensori ottici sono gli strumenti fotografici tradizionali come le camere fotogrammetriche, le camere panoramiche ecc. che operano nel campo del visibile e nell infrarosso vicino (0,9 µm). I sensori elettro-ottici sono invece gli strumenti che trasformano l irradianza in un segnale elettrico utilizzando un rilevatore fotosensibile. Si tratta di spettrometri multi e iperspettrali che operano sia nella regione del visibile che dell infrarosso (CASI e AVIRIS). I sensori che misurano l energia nelle bande dell infrarosso termico, rilevano la temperatura in superficie e le proprietà termiche degli oggetti. Non sono molto utilizzati a bordo di aerei, contrariamente agli altri sistemi attivi laser che operano nel campo del visibile e soprattutto nel vicino infrarosso e che hanno avuto un forte sviluppo negli ultimi anni, in particolar modo i laser scanner. d) In base al campionamento multispettrali, iperspettrali spettrale: sensori pancromatici, I sensori pancromatici registrano una sola banda spettrale, solitamente tra μm, corrispondente alla parte visibile dello spettro. Nel caso di aeromobili i 43
91 sensori pancromatici sono le camere fotogrammetriche, sia tradizionali analogiche che digitali. Questi strumenti spesso operano anche in modalità multispettrale, attraverso ottiche differenziate e filtri che permettono di ottenere immagini RGB e CIR, utili ad integrare attività di fotointerpretazione e classificazione del suolo. e) In base al prodotto: imaging, non imaging I sensori imaging, da cui si ottengono immagini bidimensionali delle misure di radianza registrate sono principalmente tutte le camere fotogrammetriche e i sensori multi e iperspettrali. Dai sistemi laser scanner sono invece ottenibili informazioni sulla quota, è quindi possibile ottenere mappe tridimensionali come i modelli digitali del terreno (DTM) e della superficie (DSM). I sensori non imaging producono segnali in uscita che non sono direttamente traducibili in mappe, ma da cui, attraverso tecniche di interpolazione, si possono ottenere immagini bidimensionali e tridimensionali Sensori passivi Camere fotogrammetriche analogiche Fino a poche decine di anni fa, la fotografia aerea era una specializzazione sostanzialmente sconosciuta al di fuori dell'ambiente militare ed era abitualmente trascurata sia nella storia della fotografia che della macchina fotografica. In una prima grossolana classificazione delle fotocamere aeree dobbiamo distinguere quelle da uso a mano libera da quelle installate in posizione fissa. Le prime, che vengono definite panoramiche o per uso obliquo, sono probabilmente il modello più antico nato dall'adattamento delle fotocamere terrestri alle esigenze di volo e sono composte da un corpo rigido con due impugnature laterali, come la Hugershoff degli anni '30 mostrata a lato. Al contrario quelle per aerofotogrammetria, destinate alle riprese verticali, spesso mancano di quasi tutti gli elementi che rendono riconoscibile una macchina fotografica in quanto tale (mirino, pulsante di scatto, comando dei tempi) e la forma e le dimensioni, non più soggette all'ergonomia, sono funzionali alle parti interne. Hanno comandi elettrici remoti e, negli anni '30, talvolta erano azionate dalla rotazione di una piccola elica posta all'esterno dell'aereo. Contrariamente a quanto si possa immaginare alcune fotocamere specializzate per le riprese verticali, e installate in posizione fissa a bordo dell'aereo, furono utilizzate già nel corso della prima guerra mondiale, come testimoniato da una foto d'epoca riprodotta in Storia dell'aviazione (Fratelli Fabbri Ed. 1973) che mostra un ricognitore americano Curtiss attrezzato con una fotocamera montata all'esterno della fusoliera, di fianco all'osservatore. 44
92 Una caratteristica delle fotocamere per uso topografico è la presenza di indici impressi sul fotogramma che permettono di individuare il punto principale del quadro. Nelle fotocamere più antiche la suddivisione del quadro era impressa dall'ombra di due sottili fili metallici tesi davanti al piano focale che in seguito furono sostituiti da dei riferimenti sul bordo del fotogramma. Verso il 1950 le fotocamere iniziarono a registrare automaticamente altri dati relativi alla ripresa: data, identificativo del volo, altezza, bussola, etc. Queste informazioni agevolavano l'archiviazione e la ricostruzione della mappa, che viene fatta utilizzando 2 immagini successive parzialmente sovrapposte come una coppia stereoscopica. Con questa tecnica, messa a punto fra le due guerre, la coppia stereoscopica veniva osservata su un tavolo di lavoro che permetteva di tracciare la mappa con un pantografo. Figura 26: Fotocamera Hugershoff per riprese aeree a mano libera in uso negli anni 30. Figura 27: Esempio di immagine aerea analogica. Nel corso del '900 le fotocamere aeree, soprattutto quelle fisse, hanno subito una costante evoluzione. Probabilmente l'apice è stato raggiunto dai modelli RC20 e RC30 della Wild (poi Leica Geosystem AG). Il modello RC20 (1988) aveva introdotto una funzione innovativa denominata Forward Motion Compensation che compensava il moto apparente del suolo con lo spostamento del piano focale durante la ripresa; l'fmc, insieme alla qualità delle ottiche Leica 45
93 (che pesano 58 Kg), garantiva la massima qualità dei risultati. La fotocamera RC30 vera e propria, composta da corpo, obiettivo, supporto giroscopico e cassette porta film, pesava complessivamente circa 150 Kg, realizzava immagini 23x23 cm su film in rullo. Con il nuovo millennio anche la fotografia aerea si trasforma rapidamente e nel corso del 2006 termina la produzione della RC30, sostituita dal modello digitale ADS40. Figura 28: Leica RC30 Aerial Camera Systems Camere fotogrammetriche digitali Le macchine fotografiche digitali per il rilievo aereo, differiscono significativamente da quelle analogiche che utilizzano la pellicola, utilizzano i dispositivi ad accoppiamento di carica CCD che rispondono individualmente alla radiazione elettromagnetica e un sistema a scansione lineare o matriciale. L'energia che raggiunge la superficie del CCD causa la generazione di una carica elettronica che è proporzionale alla luminosità della zona al suolo registrata. L innovazione tecnologica deriva dal fatto che le coperture fotogrammetriche precedentemente composte da una serie di immagini quadrate con proiezione centrale sono a seconda dei modelli sostituite da una sola immagine per l intera strisciata. Sono dotate di sistema di georeferenziazione diretta dei pixel grazie al sistema GPS inerziale integrato. I sistemi digitali hanno sostituito i vecchi sistemi analogici, anche nel settore della fotografia aerea obliqua e non solo nel rilievo di immagini planimetriche, questi sistemi integrano diverse macchine fotografiche digitali ad alta risoluzione in sistemi di ripresa multipli (2, 4 o 5 camere) che, pianificando opportunamente le missioni di volo, consentono il rilievo di diversi punti di vista dello stesso oggetto. Anche queste piattaforme integrano sistemi GPS/INS per l acquisizione dei parametri di volo e la georeferenziazione diretta dei fotogrammi acquisiti. Nei successivi capitoli verrà approfondito il funzionamento delle camere fotogrammetriche digitali e i diversi modelli disponibili sul mercato Sensori multispettrali Le camere fotogrammetriche sia analogiche che digitali possono acquisire immagini in modalità multispettrale, la gamma spettrale di sistemi fotografici si limita alle regioni visibili e vicino infrarosso mentre i sistemi di multispettrali (MSS) possono estendersi a bande nell infrarosso termico, sono quindi capaci di una risoluzione spettrale molto più alta dei sistemi fotografici. I sistemi di MSS inoltre acquisiscono simultaneamente tutte le bande spettrali attraverso lo stesso sistema ottico per 46
94 attenuare problemi di comparazione geometrica e radiometrica tra le bande. Poiché i dati sui sistemi multispettrali sono registrati elettronicamente, su CCD, è più facile determinare la quantità specifica di energia misurata e possono registrare una gamma superiore di valori in formato digitale Sensori iperspettrali Risoluzioni spettrali elevate (per numero bande e ampiezza delle bande stesse) garantiscono informazioni più definite sulla composizione degli oggetti rilevati e sulle loro proprietà fisiche, perciò fin dagli anni 80 alla NASA JPL hanno investito nello sviluppo di sistemi in grado di leggere e misurare più bande spettrali contemporaneamente ma soprattutto con valori molto ristretti, in modo da confrontare nel dettaglio informazioni sulla firma spettrale e i picchi di assorbimento degli elementi. Spettrometri con più di 16 bande, sono definiti ad elevata risoluzione spettrale, nello specifico sensori iperspettrali. La differenza con gli strumenti multispettrali non è tanto nella tecnologia del sensore ma nelle metodologie per l elaborazione digitale dei dati con una idonea selezione delle bande in funzione dell applicazione. Nei problemi di classificazione, i sensori iperspettrali permettono di campionare densamente le firme spettrali dei vari tipi di copertura al suolo, migliorando la discriminazione fra classi similari rispetto ai tradizionali sensori multispettrali. Di contro, l'elevato numero di canali ha un impatto diretto sui tempi di elaborazione, che dipendono anche dalla complessità dei classificatori (lineari, quadratici od altro). Inoltre, un altro aspetto ancora più problematico è la proporzionalità esistente fra la dimensionalità spettrale e la grandezza del training-set disponibile. All'aumentare della dimensionalità dei dati, la grandezza del training-set deve crescere (spesso più che linearmente) per poter sfruttare l'informazione contenuta nei dati; occorrono algoritmi di classificazione complessi e sofisticati ma al tempo stesso idonei all impiego operativo Camere termiche Molti sistemi multispettrali (MSS) percepiscono la radiazione nell infrarosso termico così come le parti infrarosse visibili e riflesse dello spettro. Tuttavia, i sensori termici usano i CCD per rilevare la radiazione termica emessa da una superficie, quindi misurano la temperatura in superficie e le proprietà termiche degli oggetti Sensori attivi Sistemi RADAR Gli strumenti da ripresa che impiegano tecnologia RADAR (Radio Detecting And Ranging) funzionano nella banda delle microonde la cui lunghezza varia da 1mm a 1m; sono di tipo attivo e non risentono dell opacità atmosferica e delle nuvole 47
95 (sensori ogni tempo). Nel telerilevamento vengono impiegati essenzialmente due tipi di radar (sia per aereo sia per satellite) che funzionano in base a due principi diversi. a) Radar a visione laterale (Side Looking Radar) che emette un fascio d onde verso il terreno attraverso un antenna la quale, commutata in ricezione, ne rileva subito la risposta; la frazione di tempo intercorsa fra stimolazione e risposta indica la distanza degli oggetti dall aereo o dal satellite, mentre l intensità del segnale di ritorno indica il tipo di superficie o la sua giacitura. b) Radar ad antenna sintetica (SAR) che emette impulsi di energia a microonde a frequenza costante e ne riceve i segnali di risposta dal suolo in modo continuativo: la discriminazione spaziale avviene tenendo conto dell effetto Doppler che ogni oggetto riflettente genera nel suo moto di avvicinamento relativo; l intensità della risposta dipende da diversi fattori quali la costante dielettrica delle superfici, la resistività, l umidità, la giacitura, la tessitura, la frequenza e la polarizzazione del segnale. L interpretazione delle immagini radar è complessa ma offre notevoli vantaggi dovuti al controllo della sorgente del sistema attivo e all incondizionamento atmosferico Sistemi Laser La tecnologia laser scanner è composta dall integrazione di una serie di componenti, il laser scanner, il sistema di posizionamento GPS e il sistema inerziale IMU (Inertial Measurement Unit) di misura dell assetto e della posizione, e infine della componentistica di alimentazione, controllo e registrazione dei dati. Il sistema invia impulsi laser a terra e riceve i segnali di ritorno, il tempo che intercorre tra invio dell impulso e la ricezione della risposta è misurato con molta precisione, dell ordine dei secondi. Una volta determinata la distanza del velivolo dal punto colpito dal raggio laser sul terreno, per ottenere le coordinate di questo punto in un sistema di riferimento assoluto occorre determinare con esattezza la posizione del sensore al momento dell emissione dell impulso e la direzione del raggio uscente (i coseni direttori del raggio stesso). Per questo si usa il dato GPS e inerziale, così da ricostruire la posizione assoluta del sensore X, Y, Z e i valori angolari di ogni singolo raggio laser. Il meccanismo di scansione del sistema è basato su un insieme di fibre ottiche che producono un insieme di misure disposte sul terreno, l avanzamento del velivolo consente di acquisire una strisciata di punti di misura sul terreno. L accuratezza viene indicata in percentuale, sia essa verticale o orizzontale, in termini di misure che stanno all interno di una certa tolleranza. 48
96 4.2 Camere digitali per riprese aeree e terrestri Caratteristiche delle immagini digitali La parola immagine nella dizione immagine digitale può far pensare che l immagine digitale sia di per sé un immagine analoga a quella di tipo fotografico, con l unica variante di essere presentata alla nostra vista sul video di un computer o mediante qualche altro dispositivo elettronico. In realtà quando si osserva un immagine sul video di un computer non vediamo un immagine digitale, bensì un immagine analogica, come se osservassimo una fotografia. L unica differenza consiste nel fatto che l immagine osservata sullo video di un computer è materializzata dalla diversa illuminazione dei pixel del video, e quindi l immagine che si crea sulla nostra retina è il risultato di una luce emessa, mentre quando si osserva una fotografia l immagine che si forma sulla nostra retina è generata dalla luce riflessa dalla fotografia stessa. Una vera immagine digitale è in realtà una matrice di numeri che deriva dall aver tradotto in valori numerici la quantità di energia emessa o riflessa da un oggetto, e che sarebbe in grado di produrre un immagine percepibile dalla nostra retina o di impressionare una pellicola. Questi valori per essere nuovamente percepiti da noi come immagine nel senso comunemente attribuito al termine, devono subire un procedimento inverso di trasformazione dal numerico all analogico. Una seconda considerazione riguarda uno degli aspetti che a volte non vengono colti e cioè il fatto che il passaggio dall analogico al digitale non riguarda solo un evoluzione puramente tecnologica, ma un evoluzione per quanto riguarda l univocità e la conservazione della matricità dell immagine. In una camera fotografica tradizionale l immagine della realtà viene proiettata sul piano focale dove è situata la pellicola. La luce riflessa dalla scena ripresa sensibilizza la pellicola; in altre parole le cariche energetiche che costituiscono la luce (i fotoni) colpiscono i granuli di alogenuro d argento dell emulsione fotografica e li modificano in modo tale che quando la pellicola subisce il procedimento chimico di sviluppo essi si anneriscono tanto più quanto maggiore è il numero di fotoni che li ha colpiti. Nel momento della presa si forma quindi nell emulsione della pellicola quella che viene detta immagine latente, che costruisce una discretizzazione dell immagine della realtà secondo il tessuto irregolare dei granuli di alogenuro d argento. L immagine latente viene ridotta in un rapporto di scala rispetto alla realtà che dipende dalla focale dell obbiettivo e dalla distanza della scena dall obbiettivo stesso e viene eventualmente deformata rispetto a quella che sarebbe una rigorosa prospettiva centrale dall effetto della distorsione prodotta dall obbiettivo. Una ulteriore deformazione dell immagine latente può essere generata dalla deformazione, per effetti termici o meccanici, della pellicola negativa prima di aver subito il trattamento di sviluppo. 49
97 Il procedimento di sviluppo del negativo e quello successivo del positivo possono poi produrre una ulteriore deformazione dell immagine latente sull immagine analogica che se ne deriva (stampa o diapositiva). Nel procedimento fotografico tradizionale vi è quindi la possibilità che la geometria e la radiometria dell immagine latente vengano alterate a causa della natura del supporto su cui viene registrata e a causa dei trattamenti di sviluppo. Se poi dal negativo vengono prodotte più copie positive, queste possono anche differire tra loro se pur in misura modesta, ma comunque rilevabile ad esempio da una strumentazione fotogrammetrica di restituzione. Ma anche la conservazione nel tempo può generare in una fotografia tradizionale su pellicola delle deformazioni geometriche. Quindi possiamo dire che nel procedimento fotografico tradizionale esiste questa mancanza di perfetta corrispondenza tra l immagine che viene proiettata sul piano focale al momento della presa e la sua materializzazione sul supporto fotografico. Una delle principali caratteristiche della fotografia digitale è invece quella di catturare l immagine latente in formato numerico e di trasmetterla e conservarla nel tempo senza alterazioni. In altre parole al momento della presa si determina in modo univoco il rapporto tra la posizione di un punto nello spazio e la sua immagine e questo rapporto rimane immutato nel tempo ed è univoco per chiunque utilizzi l immagine I sensori Struttura dei sensori matriciali Le camere fotografiche digitali possono avere strutture molto diverse, ma, allo scopo di chiarire alcuni concetti fondamentali sulla tecnica che permette di acquisire l immagine di una scena in forma digitale, considereremo per ora la struttura di una camera digitale che sia concettualmente il più possibile simile a una camera fotografica tradizionale. Prendiamo cioè in considerazione una camera digitale con la quale la scena viene ripresa in modo istantaneo attraverso un obbiettivo da un unico punto dello spazio e nella quale l elemento che raccoglie l immagine sul piano focale è un sensore, cioè un dispositivo elettronico che svolge quella funzione di cattura e memorizzazione dell immagine che veniva svolta dalla tradizionale pellicola. Il sensore fa parte del chip elettronico che è l elemento fondamentale della camera digitale. Esistono oggi due tipi di chip elettronici che vengono utilizzati dalle camere digitali: il CCD, charghed-coupled device e il C-MOS; il CCD è quello da più tempo utilizzato e molto più largamente usato del C-MOS e quindi prenderemo in considerazione solo il primo. L invenzione del CCD, charghed-coupled device, che in italiano significa 50
98 dispositivo ad accoppiamento di carica, è avvenuta all inizio degli anni 70 nei laboratori della Bell. Alcune volte il CCD viene anche detto dispositivo a trasferimento di carica poiché i pixel che lo compongono, oltre a svolgere la funzione di trasformare l energia della luce incidente su di essi in una carica elettrica, svolgono anche la funzione di trasferirla in modo sequenziale dall uno all altro. Il CCD ha non solo la funzione di catturare l immagine che si forma sul sensore, ma anche quella di trasformarla in una matrice di numeri e memorizzarla su un supporto elaborabile da un computer. Nel tipo di camera digitale che stiamo considerando per introdurre l argomento, il sensore è costituito da una piastrina di silicio, quadrata o rettangolare, sulla quale vi è inciso un fitto grigliato che la suddivide in tanti elementi quadrati: i pixel. I pixel possono essere anche di forma rettangolare, ma ora e nel seguito, per semplicità di trattazione, considereremo che essi siano di forma quadrata. Un sensore così fatto, cioè costituito un grigliato, quadrato o rettangolare, di tante linee e colonne di pixel viene detto di tipo a matrice o, con terminologia anglosassone, di tipo area array. Si chiamano invece sensori lineari, o linear array, i sensori formati da un unica riga di pixel. Per avere un idea della dimensione fisica dei sensori consideriamo per il momento quelli delle camere digitali amatoriali, le quali peraltro vengono anche impiegate, come diremo nel seguito, in riprese fotogrammetriche terrestri ed aeree. Come è noto il formato classico delle camere fotografiche tradizionali amatoriali è di 24x36mm2. Il sensore delle camere amatoriali digitali che si pongono in alternativa alle camera a pellicola di questo formato hanno sensori molto più piccoli. Se consideriamo per esempio la Nikon COOLPIX S4150 con sensore di immagine CCD da 14 megapixel con risoluzione di 4320 x 3240 pixel per una dimensione di 6.16mm per 4.62mm. Le camere digitali che si pongono in alternativa alle camere 6x6cm 2 tendono invece a raggiungere la dimensione del sensore di 6x4cm 2. Per esempio i famosi dorsi digitali hasselblad hanno dimensioni del sensore di 43,8 32,9 mm con 50 Mpixel ( pixel) di risoluzione e dimensione del lato del pixel di 5,3 µm. Come si evince dai numeri riportati dei modelli reali non esiste proporzionalità diretta tra numero di pixel e dimensione del sensore; infatti in genere le camere con minor numero di pixel, e quindi prestazioni e prezzo inferiori a quelle con maggior numero di pixel, hanno anche pixel di dimensioni inferiori. La funzione del CCD è quello di catturare l energia che cade sugli elementi fotosensibili del grigliato dei pixel del sensore per il tempo di integrazione e di trasformare questa energia in una matrice di valori numerici. Vediamo in modo molto schematico come sia fatto un CCD, considerandone in particolare il sensore ed esaminando come avvenga il trasferimento delle cariche. 51


99 Consideriamo un CCD con un sensore rettangolare di dimensioni a x b; nei disegni che seguono tale sensore è strutturato, per semplicità di trattazione, come un grigliato di quattro righe e cinque colonne, per un totale di 20 pixel; come abbiamo visto in un sensore reale questi grigliati sono composti da molti megapixel. Il sensore è costituto per la maggior parte da silicio di tipo p (positivo). Parallelamente al lato b del sensore si realizzano, nel silicio p dei canali di silicio di tipo n (negativo) (figura 29). Figura 29: Struttura schematica del CCD. Tra canale e canale di silicio n rimane una striscia di silicio p. Tracciamo un reticolato ideale a maglia quadrata in modo che i lati verticali di questo reticolo ideale cadano nella mezzeria delle strisce inter-canale; ogni quadratino di questa maglia costituisce un pixel del sensore (figura 30). Figura 30: Struttura schematica del CCD. Alla base della matrice si trova un sensore lineare che ha tanti pixel quante sono le colonne della matrice; questo sensore lineare è separato dalla matrice da una barriera di elettrodi di controllo che, opportunamente comandati, impediscono, oppure consentono, il trasferimento delle cariche contenute nei pixel dell ultima riga del grigliato ai pixel del sensore lineare. L insieme di questi elettrodi di sbarramento viene chiamato con terminologia anglosassone transfer gate. Alla fine del sensore lineare vi è un dispositivo A/D (analog to digital converter) in grado di convertire una carica elettrica in una tensione e quindi in numero ad essa proporzionale; dopo questa trasformazione i numeri vengono memorizzati in forma di matrice M numerica su un hard-disk o dispositivo similare. 52
100 Esaminiamo prima la struttura del pixel prendendo in considerazione un generico pixel e facendone una sezione in senso ortogonale ai canali di silicio n, cioè parallelamente al lato a. Figura 31: Sezione dei pixel nella struttura del CCD. In figura 31 è rappresentata, in maniera molto schematica e non nelle proporzioni reali, la sezione di tre pixel appartenenti a tre canali affiancati e in essa vengono evidenziate le seguenti parti: Il corpo del cristallo di silicio p; La parte di silicio n, che costituisce l elemento fotosensibile, detto anche fotodiodo; Un elettrodo trasparente che, caricato positivamente, crea nel silicio p un pozzo (linea al tratto) nel quale spinge e intrappola gli elettroni che si liberano dal silicio n; Gli elettroni rilasciati dal silicio n e intrappolati nel pozzo per effetto della carica positiva dell elettrodo trasparente; Un elettrodo che comanda il tempo di integrazione; Il filtro che fa passare solo uno dei colori primari; Una microlente (non sempre presente) che fa convergere la luce che cade su tutta la superficie del pixel sulla superficie del fotodiodo. Se sopra il fotodiodo non fosse posto alcun filtro la risposta del fotodiodo alla luce incidente sarebbe analoga a quella che viene data da una pellicola pancromatica in bianco e nero; in altre parole la carica di elettroni prodotto nel pozzo di un generico fotodiodo sarebbe generata da tutta la banda spettrale della luce incidente sul fotodiodo stesso. Quindi, una volta trasformate le cariche di elettroni in una matrice di numeri, questa matrice potrebbe dar luogo, con un passaggio dal digitale all analogico, solo ad una immagine in bianco e nero. Per acquisire una immagine digitale che possa dar luogo una sua visualizzazione equivalente a una fotografia a colori, è necessario quindi separare la luce incidente nelle tre componenti primarie RGB e registrane l energia fotonica corrispondente con tre valori ad essa corrispondenti. 53
101 Per far sì che un fotodiodo registri, ad esempio, solo la quantità di energia che corrisponde alla banda del blu della luce che su di esso incide, occorre stendere su di esso un filtro che faccia passare solo la banda del blu; ma in tal modo lo stesso fotodiodo sarà insensibile alla parte della luce che corrisponde alle bande del verde e del rosso. Per poter registrare una scena suddividendo la luce che da essa proviene nei tre colori primari occorre allora dedicare una parte dei pixel del CCD alla registrazione delle onde elettromagnetiche che corrispondono al colore primario rosso, una parte alle onde elettromagnetiche che corrispondono al colore primario verde e una parte alle onde elettromagnetiche che corrispondono al colore primario blu. La disposizione più usata dei filtri sui fotoni è quella che segue lo schema di Bayer, il quale prevede che il 50% dei pixel riceva la luce verde, il 25% la luce rossa e il 25% la luce blu. Nella figura 33a) è indicata la disposizione dei filtri; in b) è indicata la posizione del filtro nel pixel; in c) viene mostrato come tutta la maglia dei pixel del sensore sia coperta dai filtri secondo lo schema di Bayer. Questa distribuzione in percentuali diverse dei filtri dei colori deriva dal fatto che l'occhio umano percepisce il verde come colore predominante per la definizione della nitidezza di un'immagine. Inoltre nelle camere fotografiche digitali terrestri con CCD di formato rettangolare che possono portare a inquadrature col lato lungo del CCD verticale o orizzontale, lo schema di Bayer produce lo stesso tipo di immagine indipendentemente dalla modalità di ripresa, sia essa orizzontale o verticale. Figura 32: Distribuzione dei filtri secondo lo schema di Bayer. In fase di post processing si dovranno derivare, applicando gli algoritmi del caso, per ogni pixel le due componenti di colore che non sono state registrate dal fotodiodo di quel pixel, in funzione dei valori dei due colori mancanti registrati dai pixel adiacenti. Nella figura 32d) si vede come, per i pixel coperto dal filtro verde, il valore del blu 54
102 che gli compete possa essere ricavato semplicemente facendo la media dei valori del blu registrati nei due pixel che stanno sopra e sotto di esso; e ugualmente come possa essere ricavato il valore del rosso facendo la media dei valori del rosso registrati nei due pixel che stanno a sinistra e a destra di esso. Per i pixel che sono coperti dal filtro rosso e dal filtro blu si procede invece diversamente. Consideriamo un pixel coperto dal filtro rosso; il valore del verde verrà ricavato come somma di ¼ di ciascun valore di verde registrato nei quattro pixel che stanno a sinistra e a destra e sopra e sotto; mentre il valore del blu verrà ricavato dai quattro pixel che stanno sulle due linee diagonali. Lo stesso avviene per il calcolo del valore verde rosso dei pixel coperti dal filtro blu. Questo è il modo più semplice di fare l interpolazione; si possono applicare processi di interpolazione più complessi prendendo in considerazione un maggior numero di pixel nell intorno di quello per il quale si devono ricavare i due colori mancanti. Naturalmente l uso dei filtri secondo lo schema di Bayer riduce l effettiva risoluzione delle immagini e quindi vedremo che nelle camere aeree fotogrammetriche, dove la risoluzione geometrica dell immagine è fondamentale, non si userà questo metodo per ricavare le immagini a colori. In molti casi i fotodiodi impiegati nei sensori sono sensibili anche alla parte dello spettro delle onde elettromagnetiche dell infrarosso vicino, da 0,7 a 0,8 μm (IR); se si vogliono effettuare riprese a colori ognuno dei tre filtri dovrà schermare oltre a due bande del visibile anche quella dell IR. Se invece si vogliono effettuare riprese all IR falso colore si sostituisce, nello schema di Bayer, il filtro B con un filtro che fa passare solo l IR. Il sensore di un CCD ha quindi una struttura molto complessa e in realtà vi è differenza tra dimensione del pixel e dimensione del fotodiodo in esso incluso. In pratica quando schematizziamo il sensore lo suddividiamo in pixel secondo un grigliato che non lascia spazi vuoti tra pixel e pixel; in realtà una rappresentazione più realistica, ancorché ancora schematica di un sensore, è quella della figura 33 a) nella quale è messa in evidenza la dimensione del pixel e quella del fotodiodo; la superficie del pixel che contorna il fotodiodo costituisce uno schermo che copre i vari tipi di elettrodi che servono al controllo del tempo di integrazione e al controllo del trasferimento delle cariche da un pixel all altro. 55
103 Figura 33: Struttura schematica del sensore CCD. Questo fatto fa sì che la risoluzione effettiva delle immagini acquisite sia in realtà minore di quella nominale e che la parte non acquisita dell immagine, quella che cade sui canali schermati del sensore, sia ricostruita per interpolazione. Può anche accadere che strutture lineari che cadano sulle zone schermate vadano in parte perdute. Nei CCD il rapporto tra la superficie del fotodiodo e quella del pixel è circa del 70%; questo rapporto viene detto fil effect o fattore di riempimento; questo valore reale aumenta fino ad assumere il valore del 90% quando i fotodiodi sono coperti dalle microlenti. Per aumentare il fattore di riempimento e ridurre il rischio che strutture lineari vadano perdute, la FujiFilm ha prodotto un CCD di tipo particolare, nel quale i pixel sono di forma ottagonale e disposti in modo quinconce rispetto ai lati del sensore (vedi figura 33 b)); in tale CCD la superficie schermata è minore e inoltre è più raro che l immagine di una struttura lineare reale ne possa seguire l andamento, venendo così persa nell immagine. Inoltre le lente che copre il pixel per favorire la concentrazione dei fotoni sul fotodiodo si adatta meglio alla forma ottagonale che non a quella quadrata. Un ulteriore passo avanti per migliorare il modo di acquisire le immagini digitali a colori è rappresentato da un nuovo tipo di sensore che è stato ideato alla fine degli anni novanta dalla Società Foveon dello scienziato Carter Mead. Questo sensore deriva il suo nome, Foveon, dal fatto di registrare la luce in modo analogo a quanto avviene nella formazione dell immagine sulla retina dell occhio umano. In pratica il fotodiodo non è composto da uno strato di silicio omogeneo, bensì da tre strati che sono sensibili alle tre bande delle onde elettromagnetiche che corrispondono a i tre colori primari. La realizzazione di questo sensore comporta l impiego delle più evolute tecnologie nella realizzazione dei sensori, in quanto i tre strati devono essere distribuiti verticalmente in uno spazio di 2 μm. (figura 33 c)) Funzionamento dei sensori matriciali Vediamo ora in dettaglio il funzionamento del sensore ed in particolare i processi di creazione e trasferimento della carica. Il meccanismo di creazione della carica avviene secondo lo schema seguente: La luce, per un tempo di integrazione regolato dall apposito elettrodo, cade sulla microlente; Viene filtrata dal filtro; Attraversa l elettrodo trasparente; Viene focalizzata sull elemento fotosensibile; 56
104 I fotoni della luce trasferiscono energia all elemento fotosensibile, il quale libera degli elettroni che vengono spinti nel pozzo creato dalla carica positiva dell elettrodo. Il fatto che le strisce di silicio n siano completamente immerse nel silicio p impedisce che gli elettroni migrino spontaneamente dai pixel di un canale ai pixel dei canali adiacenti, esistono in ogni caso dispositivi per drenare gli elettroniche fuoriescono, per eccesso di carica, dal loro pixel. Nel pixel la carica è proporzionale all intensità della luce che è caduta sull elemento fotosensibile e al tempo di integrazione. E da notare che l elemento fotosensibile risponde in maniera lineare all energia che lo colpisce; cioè la carica prodotta è linearmente proporzionale all energia della luce incidente. Questo fatto costituisce un altro punto di forza della tecnologia digitale rispetto alla ripresa su pellicola, dove invece la linearità tra energia incidente sulla pellicola e sensibilizzazione degli alogenuro d argento è lineare solo per un certo intervallo. In pratica ciò significa che un sensore è in grado di mantenere un miglior dettaglio anche quando l energia su di esso incidente è molto bassa; questo fatto si traduce ad esempio, nelle riprese aeree a scopo fotogrammetrico, in una miglior leggibilità dell immagine nelle zone d ombra. Ma la carica che si genera, cioè il numero di elettroni liberati, non è solo proporzionale all intensità della luce, cioè al numero di fotoni incidenti, e al tempo di integrazione, ma anche alla superficie del fotodiodo. Se la superficie del pixel è piccola anche la zona di silicio p in cui si accumula la carica è piccola e quindi succede che gli elettroni che eccedono questa capienza fuoriescono e vengono drenati via. Ciò significa in pratica che non si ha più dettaglio nelle zone luminose. Se, per evitare questo inconveniente, si accorcia troppo il tempo di integrazione, i fotodiodi dei pixel che ricevono poca luce potrebbero non essere in grado di liberare elettroni e quindi risulterebbero tutti privi di carica, e si perderebbe il dettaglio nelle zone meno esposte. E chiaro quindi pixel di dimensioni più piccole danno meno prestazioni di pixel di dimensioni maggiori. La capacità di un sensore di dare dettagli sia nelle zone scure che nelle zone chiare, è caratterizzata da quello che viene detto range dinamico e da esso deriva in pratica il numero di livelli in cui può effettivamente essere graduata l intensità della luce che colpisce il fotodiodo. In genere nelle camere digitali terrestri questa intensità viene graduata in 256 livelli (registrati con 8 bit); nelle camere digitali che devono dare maggiori prestazioni, ed in particolare quelle per uso fotogrammetrico, si arriva a un dettaglio di 4096 livelli (registrati con 12 bit). Dopo il tempo di integrazione durante il quale si è formata la carica, avviene il trasferimento della carica da un pixel all altro, in modo che si possa realizzare lo scorrimento verticale delle cariche tra riga e riga e poi quello orizzontale nel sensore lineare che sta al fondo della matrice, dal quale poi le cariche vengono prelevate per esser convertite in numeri. Consideriamo allora una sezione del canale che contiene i pixel nel senso del canale stesso, cioè parallelamente al lato a del sensore. In corrispondenza di ogni pixel si 57
105 trovano tre elettrodi; quello centrale è quello che abbiamo visto nella figura 33 e che, caricato positivamente, spinge e intrappola gli elettroni nel pozzo che esso genera nel silicio p; degli altri due elettrodi, con riferimento al percorso che va dall alto verso il basso lungo il canale, uno precede e uno segue questo elettrodo centrale. Per illustrare il principio del trasferimento di carica abbiamo riportato nella figura 35 due pixel consecutivi nello stesso canale verticale del sensore che denominiamo i e i+1. Nella figura 34 sono riportate in sequenza temporale le situazioni che si generano nei due pixel: Figura 34: Movimento delle cariche all interno del sensore. Situazione 1: nei due pixel i e i+1 gli elettrodi centrali, fino alla fine del tempo di integrazione sono polarizzati positivamente e spingono e tengono intrappolati gli elettroni nei pozzi ad essi sottostanti. Situazione 2: nei due pixel i due elettrodi di destra vengono polarizzati positivamente allargando i pozzi e gli elettroni si distribuiscono nei due pozzi allargati. Situazione 3: viene tolta la tensione ai due elettrodi di centro e i pozzi ad essi sottostanti si chiudono spingendo gli elettroni nei pozzi sottostanti gli elettrodi di destra. Situazione 4: gli elettrodi di sinistra vengono polarizzati positivamente e quindi si crea al di sotto di essi un pozzo che mette in comunicazione il pozzo sotto l elettrodo di destra del pixel i col pozzo sottostante l elettrodo di sinistra del pixel i+1; nella figura si vede anche che questa azione comincia a far affluire nel pozzo sotto l elettrodo di sinistra del pixel i, la carica del pixel i-1 e comincia a far defluire la carica del pixel i+1 nel pozzo sotto l elettrodo di sinistra del pixel i+2. 58
106 Situazione 5: viene tolta tensione ai due elettrodi di destra e, in tutti i pixel, gli elettroni si raccolgono nei pozzi al di sotto degli elettrodi di sinistra; a questo punto la carica del pixel i-1 è stata trasferita al pixel i, la carica del pixel i è stata trasferita al pixel i+1 e la carica del pixel i+1 è stata trasferita al pixel i+2; perché si ricrei la situazione di partenza della situazione 1 occorrono ancora i due passi che seguono. Situazione 6: viene data tensione agli elettrodi di centro; i pozzi sotto gli elettrodi di sinistra vengono messi in comunicazione con quelli centrali; Situazione 7: viene tolta tensione agli elettrodi di sinistra e il pozzo sotto di loro si chiude; gli elettroni si raccolgono nei pozzi sotto gli elettrodi centrali e il ciclo può ricominciare. Lo svuotamento viene effettuato cominciando a trasferire le cariche della riga di pixel più in basso del grigliato di pixel del sensore matriciale, nel sensore lineare posto al di sotto di tale riga e da essa separato dal gate di trasferimento (v. figura 30). Non appena i pixel dell ultima riga si sono svuotati dalle cariche, essi vengono riempiti dalle cariche della penultima riga, quella della penultima da quelle della terzultima, e così via. In questa cascata le cariche sono cioè accoppiate nella caduta le une alle altre (da qui il termine di accoppiamento di carica). Vediamo cosa succede alle cariche trasferite nel registro seriale posto alla base della matrice dei pixel e da essa separata dagli elettrodi di sbarramento. La prima carica della riga del sensore lineare viene prelevata dal pixel, trasformata da carica elettrica in una tensione, questa viene amplificata e quindi tradotta in un valore numerico. Non appena il primo pixel del sensore lineare rimane vuoto, la carica del secondo pixel viene trasferita in esso e tutte le altre avanzano anch esse di un posto verso destra (ovviamente con riferimento alla figura). Così avviene lo svuotamento del sensore lineare e la trasformazione in forma numerica delle cariche della riga più bassa del sensore. Non appena questo svuotamento è stato effettuato, quella che era la penultima riga della matrice dei pixel e che ora si trova nell ultima riga, viene trasferita nel sensore lineare e le cariche di ogni altra riga viene trasferita in quella sottostante rimasta vuota. La seconda riga di cariche che è stata trasferita nel sensore lineare subisce il trattamento della precedente. Il tutto si ripete fino a che anche l ultima riga è stata trasferita nel sensore lineare ed elaborata. Quando un CCD funziona nel modo illustrato si dice che è un CCD a trasferimento di quadro pieno o, con terminologia anglosassone, full frame transfer CCD. Questa modalità di funzionamento prevede appunto che i pixel funzionino inizialmente per l acquisizione dell energia luminosa e poi come registri di scorrimento (shift register). Il sensore lineare funziona solo come registro di scorrimento. Gli elettrodi di sbarramento (transfer gate) e il sensore lineare sono sempre schermati, mentre la matrice di pixel viene schermata per il tempo di durata del suo svuotamento dalle cariche. 59
107 Vi sono altri due tipi di sensori matriciali che qui per brevità non trattiamo: i CCD a transfer frame, nei quali oltre alla matrice dei sensori che acquisiscono le immagini ve ne è una di transito, e i CCD a interline transfer, nei quali ad ogni colonna di sensori è accoppiata un altra, con funzione di registro di scorrimento, per rendere il sensore immediatamente disponibile ad acquisire un altra immagine. E importante avere un idea dell ordine di grandezza del tempo richiesto per la trasformazione delle cariche acquisite dal sensore in una matrice di numeri. Abbiamo visto che dopo l acquisizione della carica, cioè al termine del tempo di integrazione, comincia lo svuotamento del sensore col trasferimento delle cariche dell ultima riga di pixel del sensore nel sensore lineare posto alla base del grigliato di pixel; il trasferimento delle cariche di una riga di pixel nella successiva (trasferimento parallelo) avviene in un tempo brevissimo, dell ordine dei microsecondi. Il tempo maggiore è richiesto invece per lo svuotamento del registro di scorrimento seriale, cioè del sensore lineare dal quale, ad una ad una, le cariche dei pixel vengono amplificate, tradotte in una tensione e infine tradotte in un valore numerico. Anche se il tempo richiesto per lo svuotamento del registro di scorrimento seriale è solo dell ordine di alcuni decimi di millisecondo, tenendo conto che i sensori matriciali di maggiori dimensioni possono avere anche diverse migliaia di righe di pixel, ne consegue che il tempo di svuotamento di tutto il sensore può richiedere anche due o tre secondi. Il tempo di svuotamento del sensore determina in pratica il minimo intervallo di tempo tra l acquisizione di due immagini successive. Al fine di diminuire il tempo di svuotamento del sensore nei CCD tecnologicamente più evoluti il registro di scorrimento viene diviso in due, e ciascuna delle due parti fa scorrere le cariche verso un proprio convertitore A/D (vedi figura 35 a)). Figura 35: Sensori matriciali a registro di scorrimento multiplo. Sempre per diminuire il tempo di svuotamento sono allo studio anche sensori matriciali nei quali il sensore viene idealmente diviso in due parti secondo una riga di mezzeria orizzontale; al termine del tempo di integrazione le cariche di una metà del sensore viene fata scorrere in modo parallelo verso un registro di scorrimento che sta nella parte alta del sensore, e l altra metà verso la parte bassa; i due registri di scorrimento sono a loro volta divisi in due e ciascuna parte fa scorrere serialmente le cariche verso un proprio convertitore A/D (vedi figura 35 b)). 60
108 Da questa descrizione, seppur schematica, approssimativa e incompleta di come sia costituito un CCD con sensore a matrice, ci possiamo però rendere conto della sua complessità e dei problemi che pone la sua realizzazione. In pratica questi problemi di costruzione dei CCD crescono proporzionalmente alla dimensione del sensore; i problemi nascono dalla difficoltà di realizzare wafer di silicio grandi ed omogenei, dal riuscire a creare la maglia di pixel con righe e colonne di pixel correttamente allineati e ad altri motivi tecnici che riguardano il funzionamento del microchip. Vedremo quindi che la difficoltà di produrre sensori matriciali di dimensioni a quelle citate porterà a soluzioni abbastanza complesse nella realizzazione delle camere digitali aere per le riprese fotogrammetriche La trasformazione dell immagine in forma numerica Vediamo come avviene tramite un CCD, la trasformazione dell immagine ottica della scena ripresa in immagine digitale e come in questo passaggio l immagine subisca un effetto di discretizzazione. Consideriamo di riprendere l immagine di un cerchio nero su uno sfondo bianco (figura 36). Figura 36: schema di acquisizione di una semplice immagine. Consideriamo la sua immagine proiettata sul grigliato di pixel del sensore, e supponiamo per semplicità che i fotodiodi del sensore non siano coperti da filtri per la separazione del colore; immaginiamo inoltre che, come abbiamo fatto precedentemente per semplicità di disegno, il sensore sia composto da pochi pixel allo scopo di poter rendere comprensibile il discorso che stiamo facendo. Sempre per semplicità del discorso consideriamo che la dimensione del fotodiodo coincida con quella del pixel. Nella figura si vede come l immagine dell oggetto ripreso, il cerchio nero, cada sul sensore coprendo in tutto o in parte alcuni dei suoi pixel. Per semplificare l esempio, supporremo che l intervallo di discretizzazione dei valori di 61
109 intensità delle cariche accumulate nei fotodiodi venga tradotta dal convertitore A/D con numero variabili da zero a 9, anziché, come avviene realmente nelle camere digitali e come abbiamo precedentemente detto, da 0 a 255 o da 0 a Relativamente alla superficie di ogni pixel si potranno avere tre casi: Tutta la superficie del pixel viene colpita dall immagine della parte bianca del muro: in tal caso molti fotoni cadranno sul fotodiodo del pixel, si crea un consistente carica di elettroni e alla fine l informazione che il CCD acquisisce, relativamente a questi pixel è: ho ricevuto molta energia luminosa e converte e memorizza questa informazione nel numero più alto, e cioè 9; Tutta la superficie del pixel viene colpita dall immagine della parte nera del muro: in tal caso non cadono fotoni sul fotodiodo del pixel, non si genera alcuna carica e l informazione che il CCD acquisisce è: non ho ricevuto energia luminosa e converte e memorizza questa informazione nel numero più basso, e cioè 0; La superficie del pixel viene colpita in parte dall immagine bianca e in parte dall immagine nera del muro: in questo caso una certa quantità di fotoni cadono sul fotodiodo, si genera una carica di una certa entità e l informazione che il CCD acquisisce è: ho ricevuto una certa quantità di energia luminosa e traduce questa informazione in un numero intermedio tra 0 e 9. Deve essere chiaro che, nel caso in cui su un pixel cada l immagine di una parte del muro che è in parte bianca e in parte nera, è ininfluente come l immagine in parte bianca e in parte nera si distribuisca su un pixel: quello che conta agli effetti della produzione della carica è la quantità di energia che colpisce il fotodiodo. La figura 37 si riferisce all istante in cui termina il tempo di integrazione: l intensità di carica accumulata da ciascun pixel è rappresentata con un retino che è tanto più fitto quanto maggiore è la carica accumulata; il registro di scorrimento è ancora vuoto e nessun numero è stato trasferito alla matrice che conterrà l immagine tradotta in forma numerica. Il cerchio tratteggiato rosso serve solo come riferimento per comprendere la distribuzione delle cariche, ma ovviamente non esiste sul sensore. Figura 37: accumulo di carica nel sensore. 62


110 Al termine del tempo di integrazione, cioè dell esposizione dei fotodiodi alla luce, inizia la fase di svuotamento del sensore e della traduzione in numero dell intensità di carica accumulata da ciascun pixel. Le cariche dell ultima riga del sensore vengono trasferite al registro di scorrimento e di qui, con scorrimento seriale vengono convertite dal dispositivo A/D in numeri, che andranno a formare l ultima riga della matrice nella quale sarà tradotta numericamente tutta l immagine. Nella figura 38 è illustrato il secondo passo del procedimento, quando l ultima riga è già stata decodificata e nella matrice si trova già la prima riga di numeri che, poiché tutti i pixel dell ultima riga contenevano il massimo delle cariche, sono tutti 9 (secondo la convenzione fatta per questo esempio). Le cariche della penultima riga sono state trasferite nel registro seriale; tutte le cariche sono scivolate verso il basso di due righe. Le cariche della penultima riga che si trovano nel registro seriale daranno luogo alla serie di numeri che è riportata sotto di essi. Figura 38: trasferimento di carica nel registro seriale. Al termine del trasferimento di tutte le righe di pixel del sensore nel registro seriale verrà prodotta la matrice numerica che traduce la situazione originaria delle cariche nel sensore dopo il tempo di integrazione; nella figura 39 si riporta tale situazione con a fianco la matrice numerica che ne è derivata dopo il processo di svuotamento di tutto il sensore. Figura 39: produzione della matrice numerica che rappresenta l immagine. Quando poi si passa dalla matrice numerica prodotta dalla camera digitale a una sua visualizzazione (sullo schermo di un computer, su carta mediante una stampante, ecc.) si ottiene un immagine che è costituita da quadretti di toni di grigio; nell ipotesi 63
111 di riprodurre la matrice di numeri con un dispositivo che fa corrispondere a ad ogni numero un quadretto, la matrice che abbiamo ottenuto produrrebbe il risultato della figura 40 a). Figura 40: qualità dell immagine acquisita con sensori con dimensioni diverse dei pixel. Se il lato del sensore fosse stato più piccolo, avremmo ottenuto una matrice che, riprodotta con un dispositivo che fa corrispondere a ad ogni numero un quadretto, avrebbe dato luogo al risultato riprodotto dalla figura 40 b). Diminuendo ancora il lato del pixel e rimanendo immutate tutte le altre condizioni, si sarebbe infine ottenuto il risultato riprodotto nella figura 40 c). Vediamo che nel passare da a) a b) e a c) le dimensioni del pixel sono sempre più piccole rispetto a quelle dell oggetto ripreso, e di conseguenza la forma dell oggetto che l immagine riproduce è via via più simile alla forma reale dell oggetto ripreso; traduciamo questo fatto dicendo che l immagine c) ha una maggior risoluzione dell immagine b), così come l immagine b) ha maggior risoluzione dell immagine a). Quindi, rimanendo invariati la distanza dell oggetto dall obbiettivo e la focale dell obbiettivo, la risoluzione con cui viene acquisita un immagine è tanto maggiore quanto più piccola è la dimensione del lato del pixel del sensore. Poiché però le riprese terrestri ed aeree vengono effettuate con camere che possono avere una gran varietà di distanze focali e con distanze obbiettivo/oggetto molto variabili, se vogliamo confrontare in termini di risoluzione le immagini che esse possono acquisire, occorre stabilire un criterio oggettivo che tenga conto contemporaneamente della dimensione del pixel del sensore, della focale dell obbiettivo e della distanza dell oggetto dall obbiettivo Il ground sampling distance (GSD) Il modo più corretto per valutare la risoluzione di un immagine digitale è quello di prendere in considerazione l area di superficie reale la cui immagine, proiettata sul piano focale e quindi sul sensore, copre la superficie di un pixel; tale area viene detta ground sampling distance (GSD). Potremmo rendere l espressione in italiano con la dizione dimensione del pixel al suolo, riferendoci implicitamente a una ripresa aerea. Il fatto che la risoluzione di un immagine sia legata alla dimensione del GSD potrebbe far pensare che la camera che produce immagini con maggior risoluzione sia quella che ha la dimensione dei pixel del sensore più piccoli. In realtà non è così, perché, se D è la distanza di presa, f è la focale della camera ed L la dimensione del lato del pixel, il GSD è dato dalla relazione: GSD = D * ( L / f ) dalla quale risulta che il GSD risulta funzione dei tre parametri L, f e D. 64
112 Quindi se vogliamo confrontare due camere digitali al riguardo della risoluzione delle immagini che esse possono produrre, dobbiamo valutare che GSD producono a parità di distanza di presa. E dobbiamo anche aver chiaro che se, a parità di distanza di presa, una camera produce un GSD più piccolo di un altra, non è detto che la prima abbia il sensore con pixel di lato minore, poiché nel determinare la dimensione del GSD interviene anche la focale dell obbiettivo; in altre parole la dimensione del GSD, a parità di distanza, è determinata non dal lato L del pixel, ma dal rapporto L/f. Ad esempio: una camera con un sensore con pixel di 10μm di lato e con focale di 100 mm, a parità di distanza di presa dall oggetto, produce immagini con risoluzione superiore a una camera con pixel di 8μm di lato ma con focale di 60 mm. Confrontando le tre figure 41a, 41b e 41c e sapendo che sono prodotte a partire da immagini digitali di uno stesso oggetto, possiamo senz altro dire che la figura 41c deriva da un immagine che ha maggior risoluzione di quella da cui sono derivate le figure 41a e 41b; ma, se le figure derivano da immagini prese con tre camere digitali diverse e non conosciamo la distanza alla quale le tre camere hanno ripreso l oggetto, non possiamo dire quale sia la camera con risoluzione maggiore. Ricordiamo infine che ridurre le dimensioni del pixel può essere un vantaggio da un punto di vista della risoluzione geometrica, ma non lo è dal punto di vista della qualità radiometrica dell immagine; come abbiamo precedentemente detto per ottimizzare le prestazioni di una camera digitale occorre conciliare due aspetti e cioè la risoluzione geometrica e il range dinamico I sensori lineari I sensori lineari sono costituiti da un unica riga di pixel; durante il tempo di integrazione il sensore acquisisce la carica e, al termine del tempo di integrazione, funziona da registro di scorrimento per far pervenire le cariche al convertitore A/D. Lo schema di un sensore lineare, almeno concettualmente, è quindi molto semplice ed è quello riportato nella figura 41a); nella stessa figura in b) è riportata l immagine di un sensore reale. Figura 41: Sensore lineare. Per acquisire un immagine con un sensore lineare si possono seguire due strade. La prima, che viene applicata nelle camere da presa terrestri (figura 42), consiste nel far traslare il sensore nel piano focale in modo da costruire l immagine mediante l acquisizione di tante striscioline dell immagine stessa. 65
113 Figura 42: schema di acquisizione dell immagine con traslazione del piano focale. Naturalmente il soggetto deve essere fermo per tutta la durata del tempo di traslazione del sensore nel piano focale. Ad ogni posizione del sensore lineare, cioè per ogni strisciolina di immagine catturata sul piano focale, le cariche acquisite vengono fatte scorrere lungo il sensore e trasformate in numeri dal convertitore A/D. Se si vuole ottenere un immagine a colori o all infrarosso falso colore impiegando un sensore lineare costituito da un unica riga di pixel pancromatici, occorre ripetere la passata del sensore sul piano focale per tre volte, anteponendo all obbiettivo ogni volta il filtro opportuno. La soluzione per evitare la tripla passata è costituita dall impiego dei sensori trilineari. Essi sono formati dall unione di tre sensori lineari; sui fotodiodi di ciascuna riga di sensori è applicato un filtro diverso; per una ripresa a colori i tre filtri saranno i classici RGB. Nelle camere da presa terrestri i filtri lineari e trilineari sono impiegati nei dorsi digitali; i dorsi digitali che utilizzano questi tipi di filtri hanno, come già detto, la limitazione di poter essere usati solo con soggetti fermi, ma consentono risoluzioni molto più elevate delle camere o dorsi digitali basati sui sensori a matrice. Infatti ciò che limita la dimensione dei sensori a matrice è il fatto di essere costituiti da un sensore bidimensionale; quindi per aumentare le dimensioni del sensore bisogna estendere il numero dei pixel sia lungo le righe che lungo le colonne e, per il momento, ci sono delle notevoli difficoltà costruttive a portare le dimensioni oltre certi limiti. E invece più semplice costruire dei sensori lineari costruititi da una sola riga di pixel; e infatti sensori lineari di 5000 o 8000 pixel sono abbastanza comuni; sono da tempo disponibili sensori lineari e trilineari di pixel e più recentemente anche di pixel. Ritornando alle camere per riprese terrestri o a dorsi digitali per esse, si vede che utilizzando un sensore lineare di 8000 pixel e facendolo traslare sul piano focale, si possono ottenere risoluzioni superiori a quelle conseguibili con sensori a matrice. Quando il sensore lineare viene utilizzato da piattaforma satellitare o aerea (figura 43), l immagine viene formata dalla combinazione del moto del mezzo e dall acquisizione dell immagine registrata dal sensore lineare effettuata con una cadenza che è condizionata da tre fattori: la dimensione del pixel del sensore, la focale dell obbiettivo, la quota di volo e la velocità del mezzo. 66
114 Figura 43: acquisizione aerea con sensore lineare. di immagine Gli apparati di presa che si basano su questo principio vengono detti pushbroom line scanner. Poiché la ripresa viene effettuata con continuità, striscia dopo striscia, il sensore lineare deve venir svuotato dalle cariche accumulate durante il tempo di integrazione, nell intervallo di tempo che occorre all aereo per percorrere una distanza che è data dalla proiezione del pixel al suolo divisa per la velocità V dell aereo; a sua volta la proiezione del pixel al suolo è data dalla sua dimensione reale L moltiplicata per il rapporto tra l altezza di volo H e la distanza focale f della camera da presa; quindi il tempo ΔT di svuotamento del sensore lineare deve essere inferiore a: ΔT < ( L * H/f ) / V Ad esempio: se la ripresa viene fatta con un sensore lineare i cui pixel hanno la dimensione di 8μm, attraverso un obbiettivo di 80 mm di focale, da un altezza di volo di 1000 m, ogni striscia del terreno ripresa avrà, nel senso del volo, una dimensione δs che vale: δs = (1000 /.08) x m = 0.10 m Se immaginiamo che la velocità dell aereo sia di 300 km/h, pari quindi a 83 m/s, si vede che l aereo percorre lo spazio δs in un tempo: ΔT = 0.10 m / 83 m/s = s Questo significa che lo svuotamento del sensore lineare deve avvenire in meno di un millesimo di secondo. Se teniamo conto che i sensori lineari delle camere aeree arrivano anche a dimensioni di , si comprende il tempo di svuotamento del sensore possa costituire un punto delicato per le camere da ripresa aeree che impiegano sensori lineari. Vedremo ad esempio che la camera Starimager TLS, che adotta questo tipo di sensori, ha una frequenza di ripresa di 500 linee/sec e quindi viene impiegata solo su elicottero. Per superare questo aspetto critico alcuni tipi di sensori trilineari che vengono impiegati nelle camere aeree sono dotati di particolari dispostivi. Un modo per velocizzare lo svuotamento dei sensori è quello di non far funzionare i tre sensori 67
115 lineari che acquisiscono l immagine come registri di scorrimento successivamente al tempo di integrazione, ma di trasferire, per ogni sensore, le cariche su due registri di scorrimento; le cariche dei pixel pari vengono trasferite in un registro di scorrimento e quelle dei pixel dispari in un altro registro di scorrimento; in tal modo il tempo di svuotamento del sensore si dimezza (figura 44). Lo stesso vale ovviamente anche per i sensori lineari singoli, pancromatici o all infrarosso. Figura 44: sensore trilineare con doppi registri di scorrimento. Analogamente a quanto abbiamo visto per i sensori a matrice, alcuni sensori lineari sono dotati di sistemi di svuotamento ancora più sofisticati, e cioè non solo le cariche di ciascun sensore sono smistate su due registri, ma ogni registro si svuota per metà verso sinistra e per metà verso destra mediante un altro convertitore A/D; in tal modo il tempo di svuotamento di ogni sensore lineare si riduce ad un quarto rispetto a quello che si avrebbe se il sensore venisse utilizzato sia per l accumulo delle cariche sia per la loro conversione in forma digitale (figura 45). Nella figura sono stati evidenziati anche i due gate di trasferimento che consentono il passaggio dal sensore ai due registri di scorrimento. Figura 45: sensore lineare con registri di scorrimento multipli Confrontare la geometria di presa delle camere digitali Tra le camere da presa che esaminiamo nel seguito alcune sono dedicate sia ad uso terrestre che aereo, altre ad uso esclusivamente aereo e segnatamente per impieghi fotogrammetrici. Le prime, quando usate per riprese aeree, non si propongono come vere camere fotogrammetriche aeree, ma piuttosto come camere per telerilevamento, per ricognizione o come camere che hanno il compito di fornire immagini di supporto alle riprese effettuate con il laser a scansione; come camere per rilievi fotogrammetrici vengono tutto al più proposte per rilievi di strutture ad andamento lineare, come: strade, canali, linee elettriche, ecc. e comunque per rilievi che si potrebbero definire, con terminologia corrente, speditivi. Sia che si tratti di camere del primo tipo sia che si tratti di camere aerofotogrammetriche è interessante confrontare la geometria della presa delle 68
116 camere che vedremo; è opportuno quindi premettere alcune considerazioni e dare un criterio di massima per poterne effettuare una valutazione comparativa con le camere fotogrammetriche tradizionali a pellicola. Abbiamo visto che la maniera più corretta di valutare comparativamente la risoluzione di due immagini digitali è quella di valutare il GSD. Ma questo vale per confrontare due immagini, indipendentemente da come esse vengano acquisite (camera usata, distanza camera-oggetto, ecc.). Se vogliamo invece paragonare tra loro due (o più) camere digitali dal punto di vista prestazionale in termine di risoluzione dobbiamo specificare quali sono i valori che caratterizzano la geometria della presa che hanno determinato quel dato GSD. Abbiamo visto infatti che il GSD è funzione non solo della dimensione del pixel del sensore, ma anche della focale dell obbiettivo e della distanza dell oggetto ripreso dall obbiettivo. Ad esempio: consideriamo due camere digitali A e B per riprese aeree con obbiettivo di focale uguale, con uguale dimensione fisica del sensore, ma con dimensione del pixel diversa, ad esempio una camera A con pixel di 9μm e una camera B con pixel di 12μm. Non possiamo dire a priori che la camera A sia quella che dà immagini con maggior risoluzione. Infatti se voliamo con le due camere alla stessa altezza di volo H avremo in effetti per la prima un GSD inferiore, in quanto il rapporto H/f è uguale per le due camere. (GSDA = H/f 9μm ) < (GSDB = H/f 12μm ) Però se con la camera B effettuiamo una ripresa ad un altezza HB minore di HA, (ad es. HB = HA/2) otteniamo con la camera B un GSD minore di quello che otteniamo con la camera A. Però, dato che abbiamo supposto per le due camere una focale uguale e uguali dimensioni fisiche del sensore, volando a quota minore, con la camera B avremo un campo abbracciato minore di quello che abbiamo con la camera A; questo fatto, nel caso di riprese fotogrammetriche, comporterebbe lo svantaggio di dover effettuare un maggior numero di strisciate per riprendere lo stesso territorio. Diventa quindi difficile, se consideriamo il campo delle fotogrammetria aerea, confrontare tra di loro due camere digitali in termini prestazionale, pur volendosi accontentare di un confronto limitato alla geometria della presa. Tuttavia, al solo scopo di poter effettuare una prima valutazione delle camere digitali, siano esse vere camere aerofotogrammetriche che camere per uso promiscuo terrestre ed aereo, dal solo punto di vista della geometria della presa, riteniamo che sia più conveniente confrontare le varie camere da presa che prenderemo in considerazione non tra di loro, ma con un termine di paragone per così dire esterno, confrontandone cioè le caratteristiche geometriche di presa con quelle di una camera tradizionale a pellicola di formato 23cm x 23cm e di focale 150 mm. Per il confronto 69
117 del GSD supporremo che i fotogrammi siano trasformati da pellicola in forma digitale con pixel di 14μm; è opinione generalmente condivisa infatti che risoluzioni più spinte non portino alcun vantaggio reale. I parametri che prenderemo in considerazione saranno quattro: Il campo abbracciato nel senso trasversale alla direzione di volo (ACT = angolo di campo trasversale), che determina la larghezza della strisciata; Il campo abbracciato nel senso del volo (ACL = angolo di campo longitudinale), che determina la base di presa; nella camera tradizionale a pellicola esso è uguale al precedente, ma vedremo che così non è obbligatoriamente nelle camere digitali; la base di presa, in rapporti all altezza di volo, è importante perché incide sulla precisione della restituzione fotogrammetrica; per il calcolo della base di presa b ipotizzeremo un valore di ricoprimento longitudinale del 60%; Il valore massimo dell angolo di osservazione stereoscopica di un punto αmax (AMS = angolo di massima stereoscopia), che si ha per il punto che sta sulla verticale della mezzeria della base di presa; Il GSD, che consente di confrontare in termini oggettivi la risoluzione geometrica delle immagini. Effettueremo il confronto tra questi valori relativi a una camera tradizionale a pellicola e le varie camere che prenderemo in considerazione, assumendo un altezza di volo H = 2000 m. Figura 46: parametri relativi all acquisizione di immagini aeree con sensore analogico Il valore del GSD risulta: GSD = ( H / f ) 14 μm = 0,186 m = ~ 19 cm mentre l AMS risulta: αmax = 2 arctan ( (1200/2) / 2000 ) = Le frame camera Con la dizione di frame camera, si intende una camera che cattura l immagine su uno o più sensori matriciali. Se la camera è dotata di un unico sensore matriciale la chiameremo frame camera mono-ccd (questo termine, come altri usati nel seguito, non fanno parte di una terminologia ufficiale, ma sono funzionale al discorso che si sta facendo); le frame camera mono-ccd, quando usate per riprese aere, possono 70
118 venir impiegate in configurazioni multi-camera, cioè, come vedremo nel seguito, in una configurazione che prevede l assemblaggio di più camere, in genere quattro, per la ripresa simultanea dell immagine in quattro diverse bande dello spettro elettromagnetico. Se una frame camera è invece dotata di più sensori matriciali che sono alloggiati in un'unica camera la chiameremo frame camera multi-ccd Frame camera mono-ccd a camera singola Le frame camera mono-ccd sono indifferentemente usate per riprese terrestri ed aeree. Le frame camera possono essere costituite da camere fotografiche digitali nate come tali, oppure da camere tradizionali aventi la caratteristica di essere dotate di dorso porta-pellicola, e nelle quali il dorso porta-pellicola è stato sostituito da un dorso digitale, cioè in pratica da un dorso dove al posto della pellicola è stato montato un CCD per l acquisizione dell immagine in forma digitale; il CCD può essere di tipo matriciale o di tipo lineare. I sensori delle frame camera mono-ccd hanno dimensioni variabili, in genere le camere dotate di sensori fino a 2000x3000 pixel vengono dette di piccolo formato; mentre quelle che sono dotate di sensori fino a 4000x5000 pixel vengono dette di medio formato. Le frame camere mono-ccd che nascono come camere da presa terrestri vengono adattate alle riprese aeree montandole su appositi dispostivi che hanno la funzione di mantenere la camere con asse ottico dell obbiettivo in direzione nadirale; questi dispositivi sono in genere dotati di dispositivi antivibranti che hanno lo scopo di attenuare le vibrazioni che possono essere trasmesse alla camera dal corpo dl mezzo aereo su cui essa è montata. Figura 47: Kodak-460 CIR Una delle camere digitali che è stata più utilizzata per questo tipo di riprese aere è la Kodak DCS460 che a partire dall inizio degli anni 90 è stata prodotta in una serie di esemplari con dimensioni del sensore via via maggiori; nei primi modelli il sensore aveva dimensione di 1000x1500 pixel e la dimensione del pixel era di 9 μm; il modello più recente (ormai fuori produzione dal 2004) ha una dimensione del sensore di 3000x4500 pixel con una dimensione del pixel di 8 μm. 71
119 Nella figura vediamo la Kodak-460 CIR (color infrared), a sinistra vediamo come appare la camera nella sua configurazione per usi terrestri; in questo caso il corpo della camera è Nikon con obbiettivo di 35 mm di focale; il sensore matriciale, costituito da 2036x3060 pixel di dimensione di 9 μm, ha una dimensione di 18.4x27.6 mm; il sensore è sensibile anche all infrarosso vicino e quindi la camera è idonea sia alle riprese a colori che in falso colore. A destra vediamo la camera in assetto di ripresa aerea, montata in posizione nadirale su un dispositivo dotato di sistema antivibrazioni. A fine di poter effettuare riprese a colori tutte le Kodak della serie DCS, come in genere tute le frame camera mono-ccd, utilizzavano sensori con pixel schermati da filtri secondo lo schema di Bayer. Oltre alle frame camere che impiegano sensori di piccolo formato, vi sono camere, introdotte a metà degli anni 2000, prodotte per uso terrestre che hanno però utilizzi anche in campo fotogrammetrico, in particolare per la produzione di ortofoto, ma soprattutto in uso congiunto con riprese effettuate con laser a scansione da aereo (LIDAR, LIght Detection And Ranging), a seguire le grandi case produttrici di dispositivi per il rilevo aereo quali IGI, Applanix, Leica e altri, hanno prodotto dispositivi di altissima qualità mono sensore, in grado di integrarsi nativamente nei sistemi ALS (Aerial Laser Scanning). Tra queste ne ricordiamo alcune per le elevate caratteristiche e prestazioni: Leica RCD105 Digital Frame Camera, frame camera mono sensore da 39MPixel con un intervallo di acquisizione di 1/4000s, progettata specificatamente per l uso aereo sulla piattaforma ALS-series airborne LIDAR systems di Leica Geosystems. La RCD 105 è stata progettata come una camera metrica digitale per un funzionamento conforme all ambiente operativo in cui opera, comprese temperatura, urti e vibrazioni. Il CC105 Controller Camera è responsabile del funzionamento e della memorizzazione dei dati. Figura 48: Leica RCD105. I dati acquisiti sono memorizzati su due dischi rigidi removibili. Il controllo della camera è fatto tramite il pannello operatore dell ALS 50. Le lenti di 35, 60 o 100mm disponibili per il sistema, sono ottimizzate sia per l usi RGB che CIR. L uso CIR richiede comunque un filtro ottico di compensazione per evitare 72
120 aberrazioni cromatiche. Un singolo controller è in grado di registrare dati provenienti da due frame camera diverse, consentendo quindi l acquisizione simultanea di immagini RGB e CIR. IGI DigiCAM, sistema di camera digitale aerea medio-formato per uso professionale, per la realizzazione di rilievi aerei a prezzo accessibile. Integrato con il sistema di gestione voli delle IGI CCNS4 e con il sistema GNSS/IMU AEROcontrol, costituisce una soluzione completa per un rapido e automatizzato processo di lavoro per la generazione diretta di immagini geo referenziate. Il sistema è disponibile in diverse versioni con sensori che vanno dai 40 agli 80Mpixel, in quest ultima versione con dimensione del sensore di 40.4 x 53.7mm, dimensione del pixel di 5.2μm. Il sistema può montare lenti da 28 a 300mm, ed acquisire attraverso apposite lenti intercambiabili sia immagini RGB che CIR. Figura 49: IGI DigiCAM. A metà degli anni 2000 notevole sviluppo si è avuto nel settore dei dorsi digitali; fra questi possiamo ricordare il dorso Leaf Valeo 22 da 22MPixel, visibile in figura 51a), dove è montato su un corpo Mamiya 654. In figura 51b) è invece visibile il Fuji DX2000 dotato di un sensore di dimensioni eccezionali per il periodo in cui è stato presentato, 5408x7648pixel (42 Mpixel). Figura 50: a) Leaf Valeo 22, b) Fuji DX Molti sono anche i dorsi digitali basati sull uso di sensori lineari, che, pur consentendo altissime risoluzioni, sono però esclusivamente dedicati alle riprese di soggetti fermi. Abbiamo detto precedentemente che l uso del filtro di Bayer, che è presente in molte delle camere le camere di questo tipo, riduce la risoluzione nominale di un sensore 73
121 matriciale poiché, per ogni pixel, i valori cromatici vengono ricavati per interpolazione di un certo numero di pixel del suo intorno. Un modo di evitare questo decadimento consiste nell effettuare tre riprese del soggetto anteponendo all obbiettivo, per ciascuna presa, separatamente i filtri RGB e IR, come illustrato nello schema a sinistra della figura 51. Figura 51: Camera mono CCD con filtri a disco rotante. Questa operazione non pone problemi per riprese terrestri con soggetti non in movimento ma è difficile da attuare nelle camere con cui si effettuano riprese aeree. Un esempio di applicazione di questo metodo nelle camere per riprese aeree, illustrato nella parte destra della figura 51, è costituito dalla camera SensyTech AMDC (Airborne Multispectral Digital Camera); in questa camera, progettata a metà degli anni 2000, il sensore del CCD aveva una dimensione di circa 2000x2000 pixel ed era in grado di acquisire un immagine ogni 2 secondi; un filtro rotante era posto davanti all obbiettivo e consentiva di catturare sul sensore in rapida successione le immagini del terreno nelle tre bande dello spettro visibile e in quello dell IR; le quattro immagini si sovrapponevano di circa il 90%;, ma poiché non erano riprese dallo stesso punto dello spazio, occorreva un operazione postprocessamento dei dati per produrre l immagine finale a colori o all infrarosso. L uso di questa tecnica è comunque raramente applicata nelle riprese aeree mentre è molto più comune nelle riprese terrestri di soggetti non i movimento Frame camera mono-ccd multicamera Abbiamo visto che l impiego della schermatura dei pixel con filtri di diverso colore secondo lo schema di Bayer riduce in pratica la risoluzione nominale del sensore; per ovviare a questo inconveniente e cioè sfruttare la risoluzione nominale del sensore e nel contempo ottenere immagini a colori o all infrarosso falso-colore, sono stati realizzati dei sistemi di ripresa basati sull uso simultaneo di più camere da presa, in genere quattro. Nella configurazione più semplice, che è stata quella più usata specialmente per le riprese aeree non fotogrammetriche, il sistema di presa viene realizzato assemblando quattro camere e mantenendo gli assi ottici degli obbiettivi tra loro paralleli. 74
122 Esaminiamo ora la camera DiMAC (Digital Modular Aerial Camera) che è un sistema multicamera introdotto nel 2006 che si basa sull impiego di una stessa camera, basata su un CCD matriciale, assemblata in più esemplari in un apposito contenitore, la quale rappresenta il sistema più evoluto e di recente introduzione sul mercato di questo tipo di sistemi multicamera. Questo sistema si basa sull impiego di un corpo cilindrico che può ospitare da una a quattro camere. La camera base è costituta da una camera digitale con un sensore a matrice da 7256 x 5452 pixel; i pixel hanno il lato di 6.8μm e la dimensione reale del sensore risulta perciò di 50.7x39.0 mm. I fotodiodi sono caratterizzati da un ampio range dinamico (da 8 a 16 bits) e la frequenza di presa è intorno ai 250ms. Figura 52: DiMAC (Digital Modular Aerial Camera). Nella figura 52, a sinistra è rappresentato il corpo cilindrico che ha la funzione di contenitore delle varie camere; a destra è rappresentato uno spaccato schematico della camera sezionata secondo un piano verticale mediano; il disegno mostra le due camere alloggiate in una metà del corpo cilindrico; altre due possono essere alloggiate nell altra metà del corpo cilindrico. Si noti la presenza dell otturatore tra l obbiettivo e il sensore che ha la funzione di oscurare il sensore durante il tempo di svuotamento del medesimo. Il corpo cilindrico alloggia al suo interno anche il dispositivo IMU per il direct georeferencing. Come detto le riprese possono essere effettuate con una o più camere sistemate nel corpo cilindrico; quando si usa più di una camera un software opportuno ricompone in un unica immagine virtuale le immagini che vengono acquisite dai sensori delle diverse camere. Poiché i sensori sono rettangolari, utilizzando diverse combinazioni di camere e diverso orientamento dei sensori (cioè o col lato più lungo o col lato più corto disposto nella direzione di volo) si possono ottenere molte diverse configurazioni di presa e conseguentemente molte diverse immagini virtuali ricomposte. 75
123 4.4 Camere digitali aerofotogrammetriche multi-cono Le camere multi-cono Esaminiamo ora due camere digitali espressamente realizzate per riprese aeree fotogrammetriche: la Z/I Imaging Digital Mapping Camera (DMC) e la Vexcel UltraCamD. Queste due camere appartengono anch esse alla categoria delle frame camera a camere multiple, anche se nel loro caso è più appropriato parlare di camere multi-cono più che di camere multicamera; infatti queste camere sono entrambe dotate di otto coppie obbiettivo sensore nelle quali ciascun obbiettivo proietta l immagine del terreno sul sensore matriciale ad esso accoppiato, ma queste coppie obbiettivo - sensore sono rigidamente montate in un corpo camera e non sono cioè delle camere a se stanti come abbiamo visto ad esempio nel caso della DiMAC. Esse inoltre si caratterizzano per un metodo peculiare di realizzare il FMC. Abbiamo visto che nella camera DiMAC il dispositivo FMC consiste in una traslazione reale del sensore nel senso del moto, analogo, come principio, a quello delle camere tradizionali. Nella camera a pellicola Wild RC10, ad esempio, il dispositivo di FMC consiste nel far traslare il dispositivo di spianamento nel senso del moto dell aereo con una velocità v=v (f/h) essendo V la velocità dell aereo. La traslazione massima che il dispositivo può subire è di 640μm. Nelle due camere che stiamo per vedere non viene usata una traslazione fisica dei sensori, ma un particolare artificio elettronico detto Time Delay and Integration (TDI) Time Delay and Integration (TDI) Il dispositivo FMC realizzato col metodo TDI consiste nel far scorrere le cariche da una riga del sensore matriciale alla successiva per la durata del tempo di integrazione richiesto dal sensore, con una velocità di scorrimento che è funzione dei seguenti fattori: δt = tempo di integrazione L = lato del pixel del sensore V = velocità dell aereo H = altezza di volo Affinché l immagine venga correttamente acquisita occorre che la traslazione δs dell immagine del terreno sul piano focale che avviene nel tempo di integrazione δt sia inferiore alle dimensioni L del lato del pixel; se invece la traslazione dell immagine è superiore, la zona di terreno che dovrebbe essere ripresa da un solo 76
124 pixel viene raccolta da più pixel, dando luogo a quello che potremmo assimilare all effetto di trascinamento nelle camere a pellicola. Quando non si verifica la condizione δs<l, col metodo TDI, per tutti i pixel del sensore, la carica non si forma totalmente in uno stesso fotodiodo, ma viene generata per incrementi successivi in un certo numero di fotodiodi allineati lungo la colonna a cui il pixel appartiene. Ciò si ottiene facendo scorrere, durante il tempo δt, la matrice delle cariche del sensore per n righe verso il registro di scorrimento. E cioè: nel tempo di integrazione δt l immagine sul piano focale si sposta di una quantità δs che vale: δs = V (f / H) δt Se δs è maggiore del lato del pixel L, la carica che ogni pixel acquisirebbe se il sensore venisse esposto per il tempo di integrazione δt stando fermo nello spazio, si formerà invece per un accumulo di incrementi di carica, facendo scorrere le cariche verticalmente di riga in riga verso il registro seriale per un numero n di righe che vale: n = δs / L In altre parole. Durante il tempo di integrazione le cariche di ogni riga del sensore passeranno per n volte da una riga alla successiva e, ad ogni passaggio, la carica di ogni fotodiodo i della riga si incrementa di una quantità che è Ci/n essendo Ci la carica che il fotodiodo acquisirebbe se l esposizione del sensore venisse effettuata da fermo. Al termine della traslazione attraverso le n righe ogni fotodiodo avrà acquisito la sua carica Ci come somma degli n incrementi Ci/n. Al termine del tempo δt il sensore viene oscurato dall otturatore e avviene il consueto svuotamento, facendo scorrere le cariche accumulate riga per riga nel registro seriale che traduce le cariche in forma digitale. Ogni camera che utilizza questo metodo per la correzione dell effetto di trascinamento dell immagine sul piano focale è caratterizzata da un numero massimo di righe sulle quali può essere distribuito l accumulo progressivo delle cariche. Questo valore, detto maximum FMC capability Le camere Z/I Imaging DMC II. Fin dal momento dell introduzione sul mercato delle camere digitali aeree nel corso del 2000, vi è sempre stata una forte richiesta dal mercato per un sensore con una dimensione di immagine corrispondente al formato delle camere analogiche a pellicola. Quando la camera RMK TOP aveva un formato di immagine quadrato di 9x9pollici la prima generazione di DMC usava quattro CCD pancromatici da 86,016x49,152mm con 28Megapixel, in quel momento questi erano semplicemente i più grandi sensori CCD disponibili sul mercato. Grazie alla combinazione dei dati delle quattro teste della camera tramite software il formato finale dell immagine aveva 77
125 quasi la stessa larghezza di strisciata di una camera analogica a pellicola, ma solo metà della copertura lungo la direzione di volo. Quando si sono resi disponibili i primi dati sulle camere digitali DMC, l argomento di discussione principale delle comunità scientifica fotogrammetrica era incentrato sulla qualità e l accuratezza in elevazione dei dati prodotti dalle nuove tecnologie digitali. In teoria infatti un formato di immagine ridotto, riduce il rapporto base per altezza dei fotogrammi, e porta ad una minore precisione di altezza. Ma in realtà a questo punto si avevano a disposizione immagini realmente digitali, riducendo infatti gli errori geometrici introdotti dalla distorsione della pellicola durante lo sviluppo e la scansione, la precisione complessiva dei dati è migliorata. Il processo di digitalizzazione diretta delle immagini, con più bit per pixel e la più ampia gamma dinamica del CCD, paragonata alla pellicola, ha generato modelli stereoscopici molto più puliti e brillanti, che hanno permesso ai cartografi di misurare con maggiore precisione la dimensione verticale. Figura 53: Z/I DMC II Camera System. Ma c era comunque ancora da parte della comunità una forte spinta per avere un sensore digitale unico, in modo da aumentare ulteriormente la precisione geometrica e radiometrica delle immagini aeree. Z/I Imaging ha finalmente trovato una soluzione per questa esigenza, 7che ha quindi portato nello sviluppo della nuova famiglia di camere digitali DMC II. Lo sviluppo della famiglia di camere digitali DMC II è stato pianificato in quattro fase ed è iniziato a fine del 2006 all XXI congresso ISPRS di Pechino, con l avvio della fase 1 chiamato RMK D. Progettato come unità di base per la DMC II senza testa pancromatica, l RMK D può essere utilizza come camera multispettrale medio formato. Nella settimana della fotogrammetria del 2009 il design dell RMK D è stato presentato in dettaglio. La progettazione delle fasi da 2 a 4 sono state avviate dal 2009 al 2011 e includevano la progettazione dei sensori DMC II 140, DMC II 230 e DMC II
126 Design Concept L idea di base per la progettazione delle camere DMC II è stata quella di progettare un successore della prima generazione di camere DMC e sviluppare un camere digitale aerea a frame con un unico grande sensore CCD monolitico. Gli ingegneri della Z/I iniziarono le discussioni tecniche con il team di designer della DALSA CCD per illustrare i requisiti richiesti. Dopo settimane di scambio di informazioni e feedback dalla DALSA arrivò un riscontro positivo e gli sviluppatori iniziarono a lavorare una specifica tecnica per un sensore CCD pancromatico da 140Megapixel con 7,2micron di dimensione del pixel, un record mondiale per i produttori di CCD commerciali. Con la fiducia di Z/I nella competenza dei progettisti DALSA CCD, ed essendo sicuri che avrebbero soddisfatto le aspettative, lo sviluppo della camera DMC II 140 è stato avviato dal lato Z/I. Il piano era quello di sviluppare una camera grande formato con un telaio in grado di supportare 5 corpi macchina, quattro camere multispettrali RGB/NIR e una camera PAN utilizzando il nuovo CCD da 140megapixel. Figura 54: Design DMC II Camera CCD Design Le teste delle quattro camere multispettrali usano sensori CCD PAN da 42Megapixel con pixel di 7.2micron esclusivamente progettati da DALSA per la nuova famiglia di camere DMC II. La dimensione fisica del sensore è di 43.9x49.3mm e il numero di pixel per l immagine è 6096x6846. L informazione colore è generata dall esterno usando appositi filtri per ogni banda. La compensazione elettronica del movimento in avanzamento è compensata utilizzando il TDI Time Delay Integration. Questa importante caratteristica non può essere applicata per CCD a colori che usano filtri di Bayer. Il sensore CCD pancromatico da 140megapixel ha 12240x11418pixel con 7.2micron di dimensione, il sensore fisico ha la dimensione di 88mmx82mm che consente di ottenere un immagine quasi quadrata. Questo sensore segnò il record per 79
127 dimensione nel mercato dei sensori CCD, ma il team di progetto della Z/I Imaging e della DALSA non si arresero e riuscirono a produrre un secondo CCD ancora più grande con 250megapixel di risoluzione e 5.6micron di dimensione del pixel, con 17216x15556pixel e una dimensione fisica di 90x84mm. Figura 55: Multispectral CCD (sinistra) e PAN CCD (destra). Altro requisito e sfida tecnica per gli ingegneri era la capacità e rapidità di lettura dei dati. La soluzione è stata la realizzazione di 16porte dati di lettura parallele direttamente sul chip del CCD. Fino ad oggi questo è il sensore CCD con la più alta risoluzione per singolo fotogramma. Z/I Imaging possiede i diritti esclusivi della DALSA per il suo utilizzo nelle fotocamere aeree digitali Sistema ottico In collaborazione con la Carl Zeiss Jena è stato progettato un sistema ottico completamente nuovo. Sono stati selezionati un obiettivo da 45mm di focale per le camere multispettrali e uno da 92mm per il PAN della camera DMC II 140. Tutte e quattro le camere multispettrali hano sistemi di lenti identici con filtri colore dedicati per ogni spetto. La testa della camera PAN include un filtro di taglio degli infrarossi per bloccare tutte le lunghezze d onda superiori a 710nm. Quando la progettazione della lente per l ottica PAN da 92mm del DMC II 140 è stato completato, DALSA aveva reso disponibili a Z/I le specifiche per il più grande sensore da 250megapixel. Attraverso un attenta analisi dei parametri il team di Z/I ha stabilito che la lente da 92mm, inizialmente progettata per il 140, poteva essere utilizzata anche sul più grande sensore da 250, anche se con qualche limitazione sul campo di vista utile. Questa è stato l inizio della camera DMC II 230, ma l obiettivo era quello di sfruttare appieno il sensore da 250megapixel e quindi Z/I ha deciso di 80
128 progettare una seconda lente PAN con 112mm di lunghezza focale che ha portato alla progettazione della DMC II 250. Figura 56: Z/I DMC II Configurazioni della famiglia DMC II La famiglia di camere aerofotogrammetriche DMC II è composta da 3 diverse configurazioni, la DMC II 140, la DMC II 230 e la DMC II 250. L unità di base è chiamata RMK D ed è la stessa per tutti e tre le configurazioni. L RMK D può operare come camera medio formato senza installazione della testa PAN. Come già spiegato in precedenza tutti i corpi macchina multispettrali hanno un proprio filtro colore e un sistema di compensazione del movimento in avanti. Aggiungendo la testa del sensore grande formato PAN da 140megapixel alla RMK D è possibile convertire il sistema nella DMC II 140. Questa ha la metà della distanza di campionamento a terra dei sensori colore portando il rapporto PAN/Colore a 2:1, che fornisce un eccellente risoluzione del colore per le applicazioni di telerilevamento. Le prime camera di questo modello sono state consegnate ai clienti nel Marzo del La successiva configurazione è la DMC II 230 che sfrutta la potenza del sensore CCD da 250megapixel in combinazione con le ottiche da 92mm che cono usate anche nella 140. Il sistema di camere multispettrali è identico con quello delle configurazioni RMK D e della DMC II 140. Il sistema DMC II 230 è progettato per la mappatura 3D ad alta risoluzione e la produzione di ortofoto di vasti territori. I primi esemplari di questa modello sono stati consegnati agli utenti nel dicembre L ultima configurazione della famiglia di camere aerofotogrammetriche è la DMC II 250. Che include il sensore da 250megapixel in combinazione alle nuove ottiche da 112mm per la lente PAN. Così come negli altri modelli il gruppo di camere multispettrali è identico alla RMK D. Questo consente un semplice percorso di upgrade dalla RMK D alla DMC II 250. Questo modello è principalmente pensato per i rilievi a altissima 81

129 risoluzione e il 3D mapping, per rilievi ad alta quota e sui centri urbani. I primi esemplari di questo modello sono stati consegnati ai clienti nel giugno del Precisione geometrica La famiglia di camere aerofotogrammetriche DMC II è stata progettata per soddisfare i più alti standard di precisione geometrica richiesti dagli standard e superare tutti i requisiti di precisione noti. Il grande sensore CCD monolitico è alla base di queste caratteristiche. I risultati ottenuti con tutte le configurazioni sono stati superiori alle aspettative. La prima generazione DMC ha una precisione XY di un pixel e verticale di 0,7pixel. LA DMC II ha migliorato questo livello a una precisione planimetrica di 0.5pixel e 0.7pixel di precisione verticale Specifiche tecniche La tabella seguente mostra le specifiche tecniche della famiglie di camere DMC II Le camere Vexcel UltraCam La Vexcel Imaging GmbH, noto produttore di tecnologia fotogrammetrica, è stata fondata a Graz in Austria nel Il primo prodotto sviluppato dalla società è stato lo scanner di precisione per pellicola UltraScan Nel maggio del 2003 è stata presentata la camera digitale grande formato UltraCamD, tre anni dopo è stata introdotto il nuovo sistema di camera digitala aereo grande formato UltraCamX. Il sensore ha trovato trovato immediatamente un suo spazio sul mercato internazione del telerilevamento ed è presente da allora come uno dei sensori per aeromobile più versatile in molte applicazioni e scenari diversi. Il breve intervallo di tempo fra le acquisizioni consente al sensore di acquisire immagini a larga scala con elevata sovrapposizione stereoscopica dei fotogrammi. Questo consente nuovi metodi e 82
130 processi di elaborazione delle immagini fotogrammetriche, consentendo un analisi altamente ridondante e quindi robusta delle immagini. I vantaggi di questo nuovo flusso di lavoro sono per esempio utilizzati con successo all interno dei task di modellazione dei 3D City Models del programma Virtual Earth di Microsoft, poi diventato Bings Maps. La larghezza di banda radiometrica e la capacità multispettrale della camera offrono una gamma dinamica superiore di 12bit per banda e l acquisizione simultanea del banda nell infrarosso. Questo permette di introdurre un processo di classificazione multispettrale all interno dei flussi di lavoro di analisi delle immagini. Infatti in combinazione con l analisi geometrica delle grandi immagini pancromatiche il processo di elaborazione automatico supporta la classificazione multispettrale. La precisione geometrica del sensore è mantenuta dal un sofisticati metodi di postprocessing, nonché da una calibratura di laboratorio di alta precisione. Questo rende possibile l ottenimento di risultati notevoli in fase di aerotriangolazione e orientamento del blocco. Il sistema UltraCamX sfrutta preziosi sviluppi nel campo della tecnologia dei sensori, della memorizzazione e trasferimento dei dati, oltreché naturalmente l esperienza e il know-how Vexcel. Le principali carattestiche offerte dalla camera UltraCamX sono: Immagini di grande formato di x9.420pixel; Eccellente sistema ottico con 100mm di focale per le teste pancromatiche e 33mm per le teste multispettrali; Capacità di memorizzazione di 4700 fotogrammi per una singola unità di memorizzazione dati; Raccolta di immagini teoricamente illimitata grazie a storage di archiviazione intercambiabili; Dati scaricabili dal velivolo alle unità di archiviazione rimovibili; Rapido trasferimento dei dati per il sistema di post-elaborazione da parte della nuova docking station; Il sistema di ripresa è composto dall unità sensore, storage di bordo e sistema di acquisizione dati, pannello di interfaccia per gli operatori e due unità storage rimovibili. I software per il funzionamento della camera e per l elaborazione delle immagini successive alla missione di volo completano il sistema. Sono inoltre disponibili i software per la predisposizione dei progetti e le operazioni di aerotriangolazione automatizzate. 83
131 Figura 57: Sistema digitale per il telerilevamento aereo UltraCamX. La testa del sensore UltraCamX è concepito come una camera digitale a frame, è composto da otto coni camera indipendenti, 4 di questi contribuiscono all acquisizione dell immagini pancromatica ad alta risoluzione, gli altri 4 occupano invece dell acquisizione dell immagine multispettrale. La testa del sensore UltraCamX è dotata di 13 unità di sensori ad alte performance FTF5033, ognuno di questi produce immagini di 16Mpixelcon una larghezza di banda radiometrica di 12bit. Il sistema è stato sviluppato in collaborazione con LINOS/Rodenstock, un sistema ottico ad alte prestazioni con lungheza focale di 100mm per i coni pancromatici e 33mm per i multispettrali. Questo set di 2 lenti supporta il pan-sharpening con rapporto 1:3. L immagine formata da 14430x9420pixel contribuisce ad aumentare la produttività in volo. Con il 25% di sovrapposizione laterale fra strisciate la UltraCamX può coprire un territorio di 1650m con risoluzione a terra di 15cm/pixel. 84


132 Figura 58: La testa del sensore UltraCamXcomposta dagli 8 sensori. L idea alla base della progettazione della tecnologia UltraCam è quindi quella di assemblare un unica grande immagine aerea a partire dai 9 tasselli prodotti attraverso 4 coni ottici separati, in grado di produrre immagini in 5 bande: pancromatico, infrarosso, rosso, verde, blue. Successivamente alla macchina digitale UltraCamX, la Vexcel ha introdotto sul mercato la UltraCam-XP con risoluzione di x11.300pixel. Figura 59: Caratteristiche tecniche e specifiche del sensore della UltraCamX UltraCam Post-Processing and image quality control La corsa continua dei produttori all aumento della risoluzione dei sensori in termini di pixel (~130Mpixel per la UltraCamX), la manipolazione e la gestione delle immagini aeree di queste dimensioni continua ad essere un problema per gli operatori. Questo problema è maggiormente aggravato dalla necessità dei processi di controllo della 85
133 qualità di visualizzare tali immagini all interno di sistemi georeferenziati, con necessità di utilizzare l intero dataset di progetto, spesso composto da centinaia se non migliaia di singole immagini, se pensiamo ad un progetto di medie dimensioni, con circa immagini il contro è presto fatto, parliamo di circa 250Gpixel da gestire. Nella maggior parte dei casi per questo tipo di controlli è svolto su immagini di preview, di qualità ridotta rispetto alle originali, con rapporti anche di 1:100, in modo da poter svolgere questo tipo di controlli in maniera rapida. Naturalmente questo approccio mostra degli svantaggi evidenti. Non possono essere valutatele informazioni presenti nei blocchi di immagini vicine, ed inoltre il contenuto delle informazioni è sostanzialmente diverso, in quanto le immagini sono anche radiometricamente ridote (8bit in sostituzione dell originale risoluzione radiomentrica). Il motore di visualizzazione sviluppato dalla Vexcel facilita la gestione di questa grande quantità di dati utilizzando immagini tassellate e piramidali, oltreché sfruttando le potenziali di accelerazione grafica dei nuovi processori grafici presenti sul mercato. Questo consente un rapido accesso alle immagini multirisoluzione. Durante la visualizzazione, le informazioni richieste sono recuperate dalle immagini e viene successivamente generata una visualizzazione rapida. Con questo approccio le prestazioni di visualizzazione dei dati dalle capacità della macchina di mostrare i dati, e quindi dalla risoluzione dello schermo, e non più dalle risoluzione delle immagini e dal loro numero. Un altro vantaggio dell approccio Vexcel è la capacità del sistema di mantenere l alta risoluzione radiomentrica delle immagini (> 12bit) all interno dei dati piramidali. La conversione a 8 bit avviene direttamente sulla scheda grafica e può quindi essere facilmente cambiato interattivamente per l intero blocco. Il motore Vexcel supporta diverse modalità di visualizzazione: Figura 60: Sistema UltraCamX di bordo e unità di memorizzazione rimovibile. 86
134 La visualizzazione delle impronte a terra delle immagini mosta il contorno delle immagini sfruttando i dati GPS/IMU; La visualizzazione Index Map mostra un blocco di immagini geo-referenziate. Uno slider può essere utilizzato per definire la scale dell impronta delle immagini e può eliminare virtualmente la sovrapposizione; La visualizzazione HeatMap mostra il grado di sovrapposizione delle immagini; i codici colore consentono un immediato riconoscimento visivo degli schemi di volo; La visualizzazione Thumbnail che è in grado di mostrare raggruppamenti di immagini per caratteristiche, consentendo l analisi semantica di contenuto; La visualizzazione di meta informazioni sovrapposte alle immagini, nella parte alta. Queste informazioni possono essere relative a ID come testo, impronta a terra, proiezione dei centri di presa, punti di controllo a terra, punti di legame. Figura 61: Vista ravvicinata di singole immagini al alta risoluzione mostra un elevato crab-angle dell immagine ispezionata. L immagine a desta offre una vista al 100%. Oltre alla visualizzazione è estremamente importante anche la modalità di interazione dell applicazione, per questo motivo la Vexcel si è concentrata sullo sviluppo di questa funzionalità, consentendo quindi agli utenti un ottima esperienza di navigazione dei datasets d immagini. Queste funzionalità diventano indispensabili quando si tratta di individuare punti di controllo a terra, dove per esempio il blocco di visualizzazione multi-immagine diventa estremamente rilevante. Questo approccio consente di navigare senza soluzione di continuità attraverso l intero dataset di immagini, inizialmente con una vista complessiva delle immagini, per poi consentire la visualizzazione delle singole immagini al 100% della loro risoluzione. Incoerenza radiometrica, immagini mancanti e crab angle possono essere visualizzati contemporaneamente. 87
135 Figura 62: vista panoramica di un blocco di circa 2000 immagini. L immagine a sinistra mostra che ci sono delle immagini mancanti. L immagine a destra mostra una heatmap del blocco. L immagine a destra della figura 62 mostra invece la heatmap view. Le regioni verdi indicano un alta sovrapposizione, le regioni rosso al contrario indicano aree di bassa sovrapposizione. Gli utenti possono navigare senza problemi dalla vista generale panoramica al dettaglio delle singole immagini, come mostrato in figura 61. Dal punto di vista radiometrico la UltraCamX sfrutta la qualità radiometrica del sensore CCD ad alte prestazioni FTF5033 prodotto da DALSA. Poco meno di 13bit di informazione possono essere estratti tramite il convertitore analogico/digitale a 14 bit. Tale dimensione della larghezza di banda del sensore permette di risolvere in maniera ottimale i problemi legati alle zone soleggiate e ombreggiate all interno di una stessa, proprio le prestazioni in aree d ombra mostrano l ottimo potenziale e la sensibilità di questo sensore Posizionamento sul mercato dei prodotti UltraCam Immediatamente dopo l ingresso sul mercato a metà del 2003 della UltraCamD, Vexcel inizi a ricevere i primi ordini di clienti attratti dalla caratteristiche esposte nei paragrafi precedenti e fiduciosi nelle specifiche tecniche del prodotto. Le consegne delle prime camere iniziarono a gennaio 2004, da quel momento la crescita di Vexcel all interno del mercato fotogrammetrico è stata importante fino a portarla a conquistare una fetta di mercato pari al 47% dei sensori digitali venduti nel mondo nel 2011, così come evidenziato nei grafici seguenti. 88
136 Figura 63: Posizionamento e crescita sul mercato delle camere digitali Vexcel. Come mostrato in figura 61, la dimensione del frame delle immagini è passato da pixels a pixel nel più recente sensore UltraCam Eagle che sfrutta la più avanzata tecnologia in termini di sensosri CCD che le consente di raggiungere i 5,2micrin di dimensione del prixel. Inoltre la tecnologia informatica ha contribuito alla miniaturizzazione del prodotto, consentendo l integrazione di unità di memorizzazione SSD e strumentazione GPS/IMU all interno della camera. Figura 64: Incremento della risoluzione delle immagini nelle camere Vexcel UltraCam dal 2003 con UltraCam-D e larghezza di 11.5K pixels, al 2011 con la UltraCam-Eagle con risoluzione di 20K pixels di larghezza di strisciata. Queste modifiche hanno inoltre contribuito al miglioramento delle prestazioni di velocità del prodotto. Ad oggi il peso totale della nuova UltraCam Eagle è 75Kg, quasi la metà della vecchia UltraCam-D, passando inoltre da due box separati ad un unico box integrato comprendente camera e unità di memorizzazione. 89
137 Dalla UltraCam-D alla UltraCam-Eagle Le figure 63 e 64 mostrano l evoluzione dei prodotti UltraCam dal Nel tempo l idea di produrre immagini a frame di grandi dimensioni è rimasta invariata. Una competenza di base è quella di capire come ottenere precisioni sub-micrometriche in una grande immagine ottenuta dall unione di diverse tiles, invalidando quindi la necessità di lavorare con CCD arrays di grandi dimensioni. Figura 65: Evoluzione dei sensori UltraCam nel tempo. Di seguito è mostrata una tabella sintetica dell evoluzione delle caratteristiche delle camere digitali Vexcel. Tabella 2: Andamento delle caratteristiche delle fotocamere digitali Vexcel nel tempo UCD UCLp UCX UCXp UCXp Wa UCE [Pixel] x x x x x x MegaPixel CCD[MPixel] 11 48/ >12 >12 >12 >12 >12 > Release Year Image Size Pixel Size [micron] Radiometric Accuracy [bit] Time between frames [sec] 90
138 1st 2st 1st 1st 1st 2st Lens System Linos Linos Vexcel Linos Vexcel Linos Vexcel Linos Vexcel Linos Vexcel Resolution(Lp/m /37 52/37 55/37 55/37 73/52 33/23 HDD SSD HDD HDD HDD SSD Electronic Architecture Generation m) Focal length Pan [mm] Focal length Color [mm] FOV [ ] cross/along track Data Storage #Images per Data Unit Nella tabella è mostrato come le caratteristiche delle camere Vexcel siano migliorate sensibilmente negli anni, consentendo inoltre un netto miglioramento della produttiva. La camera "ultra large format" UltraCam Eagle offre un incremento di oltre il 70% se paragonato alla UltraCam D del La Vexcel UltraCam Eagle Il disegno della testa del sensore della camera Eagle si basa sul concetto di camera multicono. Quattro coni acquisiscono l immagine pancromatica ad alta risoluzione, mentre altri 4 coni acquisizione le bande rosso, verde, blue e infrarosso vicino, così come mostrato in figura in 66. Questo concetto è lo stesso che la Vexcel ha utilizzato fin dai primi sensori presentati sul mercato. Naturalmente il miglioramento del sensore è stato affiancato da un evoluzione dei prodotti software che la Vexcel affianca alla camera, sia per l elaborazione dei dati, sia per la progettazione delle missioni di volo. Le maggiori evoluzioni software sono state introdotte col software chiamato Monolitic Stitching che è stato introdotto nel Queste procedure software e la tecnologia hardware multi cono del sensore ci completano in modo efficace. Questa è sempre stata l idea guida della progettazione dei prodotti Vexcel, nota come Software Leveraged Hardware. Al di là delle procedure software di acquisizione, UltraMap offre l intera suite software di post-processing, Aero- 91
139 triangulation and Bundle Adjustment Module, Color Adjustment Module e il nuovo Surface and Ortho Module. Figura 66: La testa della UltraCam Eagle Nuove funzioni e componenti sviluppati per la UltraCam Eagle rendono la tecnologia del sensore completamente innovativo rispetto ai sensori precedenti. Quasi tutti i componenti hardware sono stati ridisegnati e sviluppati e contribuiscono al miglioramento delle prestazioni e della flessibilità della camera. Le più importanti novità introdotte da questo sensore sono: Nuovi componenti elettronici sono stati sviluppati da Vexcel per Imaging per ottimizzare la gestione del sensore CCD e consentire un lettura rapida dei dati. In questo modo è stato possibile raggiungere un frame rate di 1/1,8 secondi; L array di CCD integrati consente di ottenere pixel di dimensione 5.2micron con gamma dinamica >12bit, consentendo inoltre la creazione di immagini da 260Mpixel ed oltre pixel lungo la striscia di volo; Il sistema ottico di serie con 80mm di distanza focale per il pancromatico e 27mm per RGB/NIR definiscono una struttura dell array di sensori a 100 lp/mm; Insieme al sistema di serie è fornito un secondo sistema ottico a 210mm per PAN e 700 per RGB/NIR con un potere risolutivo di 100lp/mm e pensato per missioni di volo ad alta quota con alta risoluzione; 92
140 La possibilità per gli utenti, grazie alla fornitura di lenti intercambiabili, di scambiare le lenti sul posto; L integrazione di tutti i componenti IT di bordo, tra cui storage SSD e schede computer, nonché la soluzione di navigazione integrata UltraNav. 4.5 Camere fotogrammetriche a sensori lineari multipli Il principio di funzionamento delle camere a sensori lineari multipli (SML) Le camere aerofotogrammetriche dotate di sensori lineari multipli (SLM) riprendono con continuità il territorio sorvolato, con tre viste simultanee: una vista nadirale (nadir), una vista inclinata nella direzione di volo (forward = Fw) e una vista inclinata in direzione opposta al volo (backward = Bw). Ciò si ottiene posizionando sul piano focale tre sensori lineari. La posizione dei sensori Fw e Bw rispetto a quello Nadir può variare a seconda del tipo di camera; in genere al loro posizione non è simmetrica rispetto al sensore Nadir. Inoltre vedremo che oltre ai tre sensori Fw, Bw e Nadir che acquisiscono l immagine in tutto lo spettro pancromatico (danno cioè immagini paragonabili a quelle della pellicola in b/n), le camere SLM hanno anche altri sensori per l acquisizione del colore e dell IR. Figura 67: schema di ripresa di una camera a sensori multipli lineari. Nella figura 67 è rappresentata schematicamente, ad un istante T1, una camera digitale SLM che sta riprendendo una strisciata di terreno. In essa sono evidenziati i 93
141 tre sensori sul piano focale e le corrispondenti strisce del terreno che, nell istante T1, danno la loro immagine sui sensori; per semplicità di disegno si è omesso di suddividere i sensori lineari in pixel, così come il terreno già ripreso è stato suddiviso nelle ideali strisce che hanno dato la loro immagine sui sensori, senza evidenziare la loro suddivisione in quadratini ideali corrispondenti ai pixel proiettati al suolo. Nella figura si sono evidenziate con le lettere A, B e C tre delle strisce ideali nelle quali la strisciata è stata suddivisa dall azione di cattura dei sensori. Ciò che si vuole far rilevare è che la striscia A, come tutte quelle che la precedono e quelle che la seguono, fino a quella inclusa che all istante T1 a cui la figura si riferisce è ripresa dal sensore Bw, sono state riprese, all istante T1, da tutti e tre i sensori. La striscia B, quella che la precede e quella che la segue, all istante T1 ripresa dal sensore Nadir, sono state riprese due volte, e cioè dal sensore Bw e dal sensore Nadir. Invece la striscia C, quella che la precede, quella che la segue e quella ripresa all istante T1 dal sensore Fw, sono state riprese una sola volta. A mano a mano che l aereo avanza lungo la strisciata tutte le strisce ideali in cui il terreno viene suddiviso saranno riprese tre volte. Nella figura 54 è stato inoltre evidenziato il punto P, che è il punto mediano della striscia ripresa all istante T1 dal sensore Fw, poiché tale punto sarà preso in particolare considerazione in quanto diremo qui di seguito. Una delle caratteristiche principali di una camera a sensori lineari è costituita dalla massima frequenza di acquisizione famax, che è il massimo numero di volte al secondo con cui la camera può effettuare il ciclo composto dall esposizione dei sensori alla luce e dallo svuotamento del sensore lineare con conseguente trasformazione delle cariche accumulate durante il tempo di integrazione in forma numerica. In genere la frequenza massima di acquisizione famax varia tra 500 e 1000 cicli/s. L inverso della frequenza massima di acquisizione è il periodo di acquisizione minimo ΔTmin che è l intervallo di tempo minimo tra l inizio di due esposizioni successive dei sensori alla luce. Se, ad esempio, famax vale 500 cicli/s si avrà ΔTmin = 0,002 sec, mentre con famax = 1000 cicli/s si ha ΔTmin = 0,001 sec. I valori famax e ΔTmin sono dei valori limite che non possono essere superati; in genere però la frequenza effettiva di acquisizione fa, e di conseguenza l intervallo ΔT effettivo, cioè quello che viene impostato durante una presa, dipende dai seguenti parametri: Altezza di volo H; Velocità dell aereo V; Dimensione del lato L del pixel del sensore; Focale f dell obbiettivo. 94
142 Dall altezza di volo H e dalla focale f della camera si ricava il fattore di scala H/f; questo fattore moltiplicato per la dimensione del lato L del pixel del sensore dà la dimensione della proiezione a terra del sensore lineare nella direzione del volo; dividendo questo prodotto per la velocità dell aereo si ha l intervallo da utilizzare tra due esposizioni consecutive: ΔT = ((H/f) L) / V Come detto questo valore non deve risultare minore di ΔTmin. Ad esempio: se la ripresa aerea viene eseguita con H=2000 m alla velocità di 300 km/h e la camera ha obbiettivo con focale f=100 mm e sensore lineare col lato del pixel di 9μm, risulta ΔT = ((2000 / 0.080) ) / ( /3600) = 0,0027 sec e pertanto tale intervallo tra due esposizioni consecutive dei sensori è compatibile anche con una camera che abbia un ΔTmin = 0,002 sec, e cioè una famax di soli 500 cicli al secondo. Un altro calcolo che si può fare è quello di determinare, in base alla famax, la velocità massima Vmax a cui può volare l aereo che effettua la ripresa, in funzione dell altezza di volo H, della focale f della camera e della dimensione L del lato del pixel del sensore. Se sostituiamo infatti nella relazione precedente a ΔT la frequenza di acquisizione fa si ottiene: 1/ fa = ((H / F)) L) / V da cui V = (H/f) L fa e sostituendo fa con famax si ha : Vmax = (H/f) L famax Se assumiamo ancora i parametri dell esempio precedente (H = 2000m, f = 80 mm, L = 9 μm, famax = 500 cicli/sec) risulta: Vmax = (2000 / 0.08) (3600/1000) = 405 km/h Questo significa ad esempio che non potremo utilizzare un jet per effettuare le riprese, ma dovremo utilizzare un normale aereo turboelica. 95
143 4.5.2 La geometria di presa delle camere a sensori lineari multipli. Illustrato il principio di base della ripresa mediante camere sensori lineari multipli facciamo alcune considerazioni sulla loro geometria di presa, per meglio comprendere in cosa esse si differenzino dalle camere tradizionali a pellicola. Figura 68: schema di ripresa della camera a sensori lineari multipli Nella figura 68 è rappresentata schematicamente, ad un istante T1, la stessa una camera digitale aerea SLM della figura 35, ma rappresentata come vista da una direzione ortogonale alla direzione di volo anziché in rappresentazione assonometria. Nella figura 55a) è indicato con α l angolo tra la direzione di presa Bw e la direzione di presa Nadir; con a è indicata la distanza sul terreno tra le due strisce riprese tra la direzione Bw e la direzione Nadir che, in funzione dell altezza di volo H, vale a = H x tanα. Con β è indicato l angolo tra la direzione di presa Nadir e la direzione di presa Fw; con c è indicata la distanza tra le due strisce di terreno riprese tra la direzione Nadir e la direzione Fw che vale c = H x tanβ. Consideriamo ciò che avviene all istante T1: non occupiamoci di ciò che riprendono in questo istante i sensori in direzione Bw e Nadir e consideriamo solo il punto P che si trova nella striscia di terreno che corrisponde alla presa Fw. Consideriamo ora l istante T2 in cui l aero è traslato della quantità c in modo da portarsi con la direzione Nadir in corrispondenza del punto P (v. fig. 36 b)); con questa seconda presa Nadir e la precedente Fw si hanno del punto P due immagini che ne consentono la visione stereoscopica sotto l angolo α. Consideriamo ora l istante T3 (v. fig. 36 c)) in cui l aereo è traslato della quantità a in modo da portarsi con la direzione Bw in corrispondenza del punto P; con questa presa Bw si ha del punto P una terza immagine che ne consente la visione stereoscopica sotto altri due angoli e cioè sotto l angolo α formato dalla direzioni Nadir e Bw e sotto l angolo δ formato dalle direzioni Bw e Fw. Questo angolo è il più grande dei tre e lo possiamo equiparare a quello che abbiamo precedentemente indicato per le prese con camera tradizionale a pellicola, come l angolo di massima stereoscopia. 96
144 Si vede inoltre dalla figura 55 c) che la base di presa b, che si può paragonare a quella delle prese con camera tradizionale a pellicola, è data dalla somma di a+c. Ciò che avviene per il punto P avviene per qualsiasi punto del terreno che si trova nella zona di terreno che corrisponde alla strisciata. Possiamo notare che mentre nelle prese con camera tradizionale a pellicola c è un solo punto nel modello stereoscopico che è osservabile sotto l angolo di massima stereoscopia, nelle prese con camere SLM tutti punti che si trovano sull asse della strisciata sono osservabili sotto l angolo di massima stereoscopia. Con le riprese con camere SLM il tradizionale concetto di strisciata intesa come sequenza di fotogrammi che si sovrappongono longitudinalmente lungo la direzione di volo viene superato da quello di strisciata continua. Naturalmente per poter eseguire la restituzione fotogrammetrica di prese effettuate con camere a sensori lineari multipli occorre utilizzare programmi di elaborazione delle immagini completamente diversi da quelli che si impiegano nel caso delle prese tradizionali. Inoltre le camere SLM devono essere sempre dotate di GPS e IMU, poiché nell operazione di post-processing in cui viene formata l immagine complessiva della strisciata occorre conoscere la posizione spaziale della camera (coordinate del punto di presa e assetto angolare) in corrispondenza di ogni punto di presa nel quale è avvenuta la presa simultanea delle tre strisce di terreno (Fw, Nadir e Bw). Con riferimento alla figura 67 possiamo dire che se n sono le striscioline ideali in cui viene suddiviso il territorio che costituisce la strisciata, saranno n i punti di presa dei quali dovranno essere note le coordinate e n le triplette dei parametri di assetto angolare della camera in corrispondenza di essi. Le camere a sensori lineari multipli sono caratterizzate da molti aspetti positivi. Innanzitutto ne sottolineiamo uno di carattere generale e che potremmo definire strategico: esse si avvalgono, se pur con le dovute differenze, della stessa tecnologia degli apparati a scansione satellitari; vedremo anzi che una delle camere SML che prenderemo in considerazione nel seguito è direttamente derivata da una camera destinata originariamente ad essere montata su una sonda destinata ad esplorare il pianeta Marte. Ciò significa che le camere SML si integrano in uno schema di rilevamento del territorio che le accomuna con le riprese satellitari e quindi, da un lato, ne può sfruttare l evoluzione tecnologica, e dall altro offre prodotti che sono simili a quelli proposti dalla tecnologia satellitare ad alte risoluzione. In secondo luogo le camere SML, sul piano della produzione si caratterizzano per la ripresa continua delle strisciate, non più frammentate in fotogrammi. Le riprese inoltre si prestano molto bene alla produzione delle ortofoto, poiché, utilizzando la presa nadirale, almeno nel senso del volo, l effetto prospettico è completamente eliminato. 97
145 4.5.3 La camera ADS40 della Leica (LH System) Il sensore aviotrasportato ADS40 è stato presentato al pubblico in occasione del XIX congresso ISPRS tenutosi ad Amsterdam nel luglio del ADS rappresenta l acronimo di Aerial Digital Sensor. Le due fasi di presentazione al pubblico e d immissione sul mercato hanno fatto seguito ad una intensa attività di sviluppo e di test. L ADS40 è un sensore digitale trilineare ed è stato sviluppato dalla LH Systems in collaborazione con il Centro Aerospaziale Tedesco (Deutsches Zentrum für Luftund Raumfahrt DLR). La presentazione di Amsterdam ha fatto seguito ad una fase di sperimentazione su modello ingegnerizzato (EM Engineered Model). Il modello ingegnerizzato costituisce, nelle varie fasi di progettazione, la pre-serie di una macchina operativa commerciale. Il primo test di volo con modello ingegnerizzato (EM) risale alla fine del Dopo questo modello è stato definito un modello prototipo (PM Prototipe Model) perfezionato avente circa pixel per linea. Il modello prototipo è stato testato per la prima volta nel gennaio del Al modello prototipo ha fatto seguito il modello di serie (figura 69). Figura 69: Sensore a tre linee Leica ADS40. Le componenti essenziali in cui può essere suddiviso il sensore LH System ADS40 sono: SH40 (Sensor Head 40) testata del sensore in cui sono alloggiati ottiche e linee CCD; MM40 (Mass Memory 40) - memoria di massa in cui vengono immagazzinati i dati; OI40 (Operator Interface 40) Interfaccia Operatore; I/O BOX Interfaccia di gestione delle connessioni esterne; CU40 (Control Unit 40) Unità di Controllo; PAV30 piattaforma giro-stabilizzata (integrata nella testa SH40); 98
146 POS Il computer che gestisce posizione e assetto del sensore (integrato nella Unità di controllo CU40); DO64 (Digital Optics 64) la componente ottica del sensore (integrata nella testa SH40); IMU (Inertial Measurement Unit) il sistema inerziale (integrato nella testa SH40); GPS (Global Positioning System) il sistema di posizionamento (integrato nella Unità di controllo CU40); FCMS (Flight Control Management System) Il computer di bordo per il controllo del volo; SPM (Signal Processing Module) Il modulo di processamento dei segnali elettronici (integrato nella testa SH40). Figura 70: Componenti del sensore ADS40. La testata SH40 (figura 71) rappresenta sicuramente la parte principale del sensore. In essa sono contenuti: Il piano focale con le linee CCD e i filtri; La lente telecentrica; La videocamera di controllo a terra ; Il sistema IMU; Il sistema di raffreddamento; Le varie componenti elettroniche. 99
147 Figura 71: Testata del sensore ADS40. Le ottiche della ADS40 sono progettate per applicazioni di fotogrammetria ad alta risoluzione e per applicazioni di telerilevamento. Il sistema di lenti è del tutto simile, nelle dimensioni esterne, nel peso, nella risoluzione e nell efficienza luminosa alle lenti della diffusa camera a pellicola Leica RC30. Tuttavia il progetto dei due sistemi ottici differisce parecchio dal punto di vista nelle modalità di registrazione. Nella camere a pellicola la minimizzazione delle distorsioni è un obiettivo di primario interesse, invece nelle lenti della camera digitale ADS40 il requisito più importante è costituito dalla telecentricità della lente nella direzione del piano focale. Questa specifica torna utile in generale per ogni camera digitale ma rappresenta un fattore assolutamente critico per la ADS40 indispensabile per la registrazione delle strette bande multispettrali. Il piano focale è costituito da quattro alloggiamenti CCD: due di questi contengono le linee CCD singole e due alloggiano le linee triple. Lo sviluppo della tecnologia di funzionamento del piano focale prevede la valutazione della accuratezza dell allineamento dei CCD, il controllo della temperatura dei sensori CCD e l interfacciamento tra la componente ottica, i filtri e l ambiente di gestione. Tutti i sensori CCD vanno installati con una incertezza di qualche micrometro. Per raggiungere un range dinamico di 12 bit con una risoluzione radiometrica di 8 bit è stato introdotto un sistema di stabilizzazione della temperatura. Inoltre il piano focale è stato equipaggiato con un sistema di ventilazione e aerazione per impedire la condensa di vapore acqueo sulla superficie di vetro dei moduli CCD e per evitare eventuali deformazioni del piano focale. Ogni CCD ha il proprio alloggiamento la cui altezza è compatibile con la tolleranza esistente tra la superficie di silicone e l alloggiamento della parte inferiore del vettore CCD. L accuratezza di costruzione di ogni alloggiamento supera il micron. La ceramica con cui sono realizzati questi supporti consente una efficiente dissipazione del calore: ogni inserto è costruito in modo tale da presentare un buco in cui vengono inseriti i tubi necessari alla fuoriuscita del calore. Il sistema di dissipazione del calore si basa su un insieme di valvole che diventano operative a sensore acceso. 100
148 Il piano focale del sensore ADS40 ospita una serie di vettori CCD la cui configurazione è variabile in funzione delle richieste del cliente. Un esempio di una di queste configurazioni (standard) possibili è illustrato in figura 72. Figura 72: standard ADS40. Configurazione La configurazione standard delle linee CCD è costituita da: Una coppia di vettori CCD pancromatici da pixel orientati davanti (Forward) sfalsati di mezzo pixel. La soluzione progettuale dei CCD sfalsati consente di ottenere immagini senza l effetto di aliasing. Una coppia di vettori CCD pancromatici da pixel orientati in modo nadirale (Nadir) sfalsati di mezzo pixel e accoppiati ad un vettore CCD da pixel che acquisisce sulla banda dell infrarosso vicino. Una coppia di vettori CCD pancromatici da pixel orientati dietro (Backward) sfalsati di mezzo pixel. Tre vettori RGB multispettrali da pixel orientati in modo nadirale. Riassumendo, questa configurazione prevede tre canali pancromatici ognuno dei quali formato da una coppia CCD sfalsata da pixel e 4 canali multispettrali formati da 4 vettori CCD singoli. In ogni linea CCD la dimensione del pixel è di 6.5μm. Ciascun vettore CCD presenta quindi una lunghezza di circa 8 cm (12000 CCD x 6.5μm). I vettori CCD sono disposti in modo tale da generare un angolo di vista trasversale (FoV) di 64. Gli angoli stereoscopici d osservazione (direzione longitudinale) secondo cui sono disposte le linee CCD sono di 14.2 e 28.4 (figura 73). 101
149 Figura 73: Angoli stereoscopici. La asimmetria della disposizione delle linee CCD apporta alcuni sostanziali benefici: La possibilità di potere scegliere tre diverse configurazioni di visione stereoscopica (Forward/Nadir 28.4, Backward/Nadir 14.2, Forward/Backward ); Evita singolarità nelle triangolazione aerea. formule matematiche usate nel processo di La lunghezza focale equivalente della camera ADS40 è pari a mm. Un sensore come ADS40 ad elevate prestazioni necessita di un sistema ottico analogamente potente. Il sistema di lenti di cui è dotato ha il compito di raccogliere e trasferire le informazioni geometriche e radiometriche dalla superficie terrestre al sensore. La componente ottica del sensore ADS40 è chiamata DO64 acronimo di Digital Optics. La parte principale di questa componente è rappresentata dalla lente telecentrica (figura 74). Figura 74: Lente telecentrica. Questo sistema ottico consente ai raggi ottici provenienti da tutte le direzioni di colpire il piano focale perpendicolarmente. Nelle camere fotogrammetriche tradizionali solo i raggi sovrapposti all asse ottico colpiscono il piano focale perpendicolarmente. La presa non è assimilabile ad una prospettiva centrale; in questo caso si parla di presa pseudo-ortogonale. 102
150 Il sensore ADS40 di seconda generazione Ad ottobre 2006 Leica ha annunciato la seconda generazione dei sensori ADS40. La nuova ADS40 consente di avere 5 bande perfettamente corregistrate senza fare ricorso al pan-sharpening. Questa possibilità è assicurata da un nuovo sistema ottico brevettato Leica: il filtro tetracroide. La Leica ha introdotto sul mercato due nuove testate: la SH51 e la SH52. Queste due nuove testate sono più piccole e sono così costituite: La SH51 è equipaggiata con un solo filtro tetracroide ed è indirizzata ad una efficiente produzione di ortofoto; La SH52 è equipaggiata con 2 filtri tetracroidici e rappresenta la testata universale adeguata a tutte le applicazioni. La SH52 aggiunge alle capacità della SH51 la possibilità della acquisizione stereoscopica e le immagini RGB e NIR. Il sensore integra un nuovo sistema di posizionamento inerziale: il Leica IPAS I nuovi sensori ADS80 e ADS100 Attualmente il sensore ADS40 è uscito dal catalogo delle Leica, dove invece restano disponibili i modelli ADS80 e ADS100. Il sensore ADS80 rappresenta la terza generazione di sensori per il rilievo di immagini digitali di grande formato aviotrasportati con sensori lineari prodotto dalla Leica, in grado di acquisire 5 diverse bande dagli stessi angoli contemporaneamente (R, G, B, IR, PAN). Questa soluzione è disponibile con due diverse configurazioni, attraverso le due testate SH91 e SH92. Questa soluzione consente di coprire la più ampia gamma di applicazioni geo spaziali e di mappatura 3D. La stretta integrazione del sensore, con il sistema IMU incorporato e tutte le novità dell unità di controllo CU80, consentendo quindi un ottima efficienza in termini di processo produttivo. Fra le novità introdotte, in termini di miglioramento delle performance, possiamo indicare: Acquisizione standard di immagini perfettamente co-registrate, uguale risoluzione delle immagini in pancromatico, colori e infrarosso, miglior dettaglio e massima qualità dell immagine (12000pixel swath); Modalità addizionale di acquisizione immagini HiRes per ortofoto, in grado di offrire un notevole miglioramento delle performance di produttività e notevole risparmio di costi grazie ad una larghezza della strisciata di pixel; Miglioramento dei tempi del ciclo di acquisizione consentendo l acquisizione di immagini con ridotto GSD (<5cm) ad una velocità maggiore; Sistema di georeferenziazione diretta delle immagini grazie al sistema integrato Leica IPAS Freebird che riduce la necessità di sidelap e punti di controllo a terra, oltreché ridurre sensibilmente i tempi di produzione; 103
151 Utilizzo di FlashMemory MM80 per la memorizzazione dei dati con maggiore affidabilità e riduzione del payload; Aumento della velocità di trasmissione dati permettendo l acquisizione simultanea di dati per la fotogrammetria e il telerilevamento; Miglioramento degli algoritmi di compressione garantendo inoltre una più elevata qualità delle immagini in tutte le bande di acquisizione; Nessuna necessità di operazioni di pan-sharpening o immagini virtuali; Sistema di elaborazione rapido delle ortofoto Leica XPro; Modulo Leica XPro SGM per l estrazione facilitata di DSM accurati dalle immagini. Nel secondo trimestre 2013 la Leica Geosystems ha rilasciato sul mercato la ADS100, una nuova generazione di sensori digitali aerofotogrammetrici. Questo nuovo dispositivo consente un netto miglioramento delle performance in termini di qualità dell immagine, precisione, prestazioni ed efficienza, consentendo quindi tempi e costi di acquisizione ridotti. Figura 75: Installazione del sistema Leica ADS80 su velivolo. 104
152 Fra le novità introdotte possiamo segnalare: Strisciate multispettrali a colori con larghezza di pixel in RGBN per la massima efficienza di acquisizione dati; Fasi TDI selezionabili per una migliore sensibilità ed espansione dell inviluppo operativo; Miglioramento dei tempi del ciclo di acquisizione, consentendo GSD inferiore a maggiore velocità; Strisciate RGBN a colori, in avanti, un interpretazione stereo più flessibile; Miglioramento della piattaforma Leica PAV100 girostabilizzata con controllo adattivo per una migliore qualità dell immagine; Sistema SPAN GNSS/IMU integrato con elaborazione strettamente accoppiata per una riduzione dei consumi; Flusso di lavoro end-to-end, dalla pianificazione della missione con Leica Mission Pro alla generazione di ortofoto e nuvole di punti con Leica XPro. planimetriche e indietro per Inoltre il nuovo sistema ADS100 condivide un installazione sull aeromobile unificata con gli altri dispositivi Leica. Infatti tutti i componenti di bordo, come Leica PAV100, Camera Controller CC33 e display operatore e pilota possono essere condivisi con i sistemi Leica RCD30 medio formato e camere oblique, riducendo quindi in modo significativo i costi di gestione e semplificandone il funzionamento. Figura 76: Leica ADS100 Airborne Digital Sensor 4.6 Sistemi multi-camera obliqui I sistemi multi-camera di telerilevamento aereo per il rilievo di immagini oblique stanno ormai diventando uno standard tecnologico all interno del mercato geospaziale in continua crescita, con applicazioni vicine a quelle più note che utilizzano fotografia planimentrica e i suoi derivati, quali per esempio: DSM, DTM, 105
153 ortofoto e mappe. In linea con l automazione del flusso di lavoro che utilizza fotogrammetria standard, dove ormai la tecnologia delle camera digitali stanno raggiungendo livelli importanti, grazie a sensori in grado di produrre immagine di grande-formato. Possiamo ormai osservare sensori sul mercato con risoluzioni di oltre mezzo miliardo di pixel, come la frame-camera B660, possiamo infatti osservare come ormai la corsa dei pixel nella tecnologia dei sensori di bordo assomiglia molto a quella del mercato delle fotocamere consumer. Figura 77: Esempio di visualizzazione di immagini oblique di Napoli su Bing Maps. La prima fotografia aerea obliqua è stata presa da James Wallace Black nel 1860, a Boston negli USA. Poi nel 1930 la U.S. Geological Survey e il genio dei corpi armati americani utilizzarono una T-3A a cinque lenti Fairchild per scopi di mappatura, sorveglianza e ricognizione. Il concetto di montaggio di più sensori all interno di un singolo box è emerso nuovamente con l arrivo della tecnologia digitale, quando si cerco di raggiungere dei migliori risultati in termini di performance costo/beneficio senza dover necessariamente sostenere costi astromici. Tuttavia, il vero risveglio dei sistemi obliqui è arrivato nel 2000 con l avvento di Pictometry International e del suo sistema brevettato in grado di produrre immagini oblique e nadirali con un unico strumento. Esempi di queste immagini possono essere visti all interno della piattaforma Bing Maps di Microsoft, con l utilizzo dello strumento di navigazione a volo d uccello (figura 77). Gli attuali sistemi di camera di ripresa oblique sono disponibili in una varietà di configurazioni diverse che si differenziano per il numero di sensori, disposizione, 106


154 modalità di acquisizione, sensibilità spettrale, ecc.. A seconda di queste caratteristiche i diversi dispositivi possono essere raggruppati secondo la classificazione che segue: 107
155 FAN Configuration: estende il normale sistema di copertura con strisciate sovrapposte ed è principalmente composto da sistemi a doppia camera come, ad esempio, il Trimble AIC x2 o il Dual DigiCAM. Entrami i sistemi sono disponibili con sensori CCD che vanno da 22 a 60Mpixel, e lenti intercambiabili fino a 150mm. Due camere sono accoppiate in un unico grande telaio per raddoppiare le dimensioni del sensore. Costruiti come sistemi modulari, i sensori possono essere riorganizzati all interno della struttura di montaggio per essere utilizzati sia come sistemi di rilievo planimetrico che obliquo. Una innovativa soluzione di questa tipologia di sistemi è proposta da VisionMap con il sensore A3 un sistema di avanzamento dei fotogrammi che consente di catturare fino a 64 immagini per spazzata, corrispondente ad un campo visivo di 109. Con i 300mm di lunghezza focale e avanzati sistemi antitrascinamento di compensazione del moto, il sistema A3 permette di volare ad alta o bassa quota mantenendo comunque un GSD di grandi dimensioni. Maltese-cross configuration: si tratta di una configurazione con una singola camera nadirale e quattro camera inclinate verso le direzioni cardinali con un inclinazione da 40 a 50. Questa configurazione è la più comune e la più vari, ed utilizza camere a frame di piccolo, medio o grande formato. Ci sono due tendenze di sviluppo differenti all interno di questa tipologia di sistemi: uno utilizza principalmente camere di piccolo e medio formato sottolinea il concetto di modularità e flessibilità (IGI, Midas Track Air, Leica), l altro produce invece sistemi chiusi e investe sensori più grandi e potenti (Microsoft, CICADE, Icaros). Block configuration: in questi sistemi le camere sono organizzate in un blocco. Analogamente ai di Fans, esiste una sovrapposizione sufficiente fra i singoli fotogrammi per consentire di rettificare e mosaicare le immagini per la creazione di un singolo fotogramma quasi verticale di forma rettangolare. La prima generazione delle camere z/i di DMC erano composte da un sistema con quattro camere medio formato a bordo, i cui fotogrammi venivano mosaicati in post-processing per la creazione di un immagine grande formato, questo è un tipico esempio di questa tipologia di sistemi. Altri esempi sono Trimble AIC x4e IGI DigiCam Quattro, con sensori Rollei e Hasselblad rispettivamente. Questi tipi di sistemi di ripresa non sono realmente obliqui, le singole camere sono quasi verticali, non mostrano quindi le facciate degli edifici, ma possono essere adattati per diventare dei sistemi obliqui. Il boom sul mercato e il crescente interesse per le immagini oblique multi-camera è principalmente dovuto alla loro principale qualità, cioè la capacità di rivelare la facciata degli edifici, e normalmente la loro impronta a terra. Di conseguenza è diventato più facile per utenti non esperti interpretare i dati, in quanto queste immagini mostrano informazioni maggiormente intuitive rispetto a quando mostrato 108
156 da una semplice immagine planimetriche. Le applicazioni basate su vedute aeree oblique sono molteplici. Per esempio è possibile utilizzare queste immagini per l aggiornamento degli ingombri stradali, per l analisi della situazione urbana all interno del centri abitati, o per la possibilità unitamente ad altre tecnologie di consentire una modellazione del territorio urbano foto realistica attraverso la costruzione di 3D City Models. Poiché questo tipo di applicazioni sono considerate di applicazioni di tipo metrico, è probabile che rispettino i relativi parametri di accuratezza, esclusivamente se si dispone di accurato orientamento esterno dei fotogrammi, attraverso aggiornamenti costanti della calibrazione dei dispositivi e disponibilità di un DTM affidabile per i singoli fotogrammi. Possono essere utilizzate calibrazioni più rapide e georeferenziazione diretta nel caso di applicazioni orientate alla valutazione qualitativa, nei casi più rigorosi, come ad esempio applicazioni di Image Matching) è obbligatorio l uso di parametri definiti e regolati in modo ottimale. Per poter utilizzare datasets di immagini oblique all interno di processi produttivi, i flussi di lavoro per la calibrazione delle immagini devono essere adattati di conseguenza. Anche le soluzioni commerciali più avanzate hanno attualmente difficoltà nella gestione corretta di datasets di immagini miste, oblique e nadirali, dovute principalmente diverse scale delle immagini ed alle variazioni radiometriche. Il mercato della tecnologia avionica di bordo è in forte espansione e di conseguenza è crescente l interesse rispetto ai sensori per scopi di mappatura, si è quindi data una panoramica dei sistemi multi-camera oblique esistenti e delle soluzioni per la lavorazione degli stessi. Tra le diverse soluzioni commerciali si può osservare come probabilmente le configurazioni a croce maltese (maltese-cross configuration) siano quelle più diffuse ed apprezzate nelle diverse caratteristiche offerte. Esistono infatti sistemi di questo genere da 2 a 10 corpi macchina, con o meno sistemi di gestione dell avanzamento e di compensazione delle vibrazioni, offrendo soluzioni di immagini singole in medio formato o grande formato generate da merge di immagini, tali immagini possono inoltre essere acquisite con diverse sovrapposizioni. La disponibilità di sistemi obliqui è veramente ricca, ma parlando di una tecnologia relativamente recente, esiste ancora una questione aperta rispetto all applicazione di tale tecnologia, e di quali siano i suoi punti di forza e di debolezza, sia relativamente alle diverse piattaforme che naturalmente alla varietà e disponibilità di dati prodotti, sia relativamente alla loro utilizzo all interno di sistemi dedicati alla mappatura metrica. Il post-processing di immagini oblique è un problema di ricerca ancora parzialmente aperto ed estremamente complesso. La geometria di queste immagini e delle corrispettive applicazioni, con tutte le loro caratteristiche: variazioni di scala all interno delle immagini, variazioni di luminosità, molteplici direzioni di osservazione e grandi differenze di prospettiva fra i punti di vista non consentono di 109
157 trovare corrispondenze attraverso le viste utilizzando le tradizionali tecniche e metodi ormai consolidati. E possibile però utilizzando approcci appropriati triangolare correttamente un gran numero di immagini sia generate da sistemi in configurazione FAN che MalteseCross. Quando si trattano immagini con una forte corrispondenza e vengono generate nuvole di punti, rimangono aperte le questioni relative alla sovrapposizione minima richiesta durante i voli, al numero ottimale di immagini di riferimento da utilizzare, illuminazione e scala variano fra aree sovrapposte delle diverse immagini e producono disallineamenti di profondità fra le immagini. Come riportato da diversi ricercatori, la semplice fusione di nuvole di punti produce disomogeneità e sfocatura radiometrica, un altro problema che deve essere ulteriormente affrontato. Metodologie avanzate devono ancora essere sviluppate e messe a punto al fine di migliorare questi effetti e la qualità sia delle immagini che delle nuvole di punti da queste ottenute in fase di triangolazione. Le immagini oblique consentono comunque una descrizione più profonda e completa delle aree urbane, che permette di estrarre più informazioni nel dominio delle applicazioni smart-city. Integrando immagini nadirali e oblique si può migliorare la derivazione delle conoscenze, ma finora l argomento non è stato ancora oggetto di studi approfonditi. Inoltre, l uso di diverse bande spettrali, come per esempio la termica, da immagini oblique potrebbe spingere l utilizzo di questo genere di sistemi in nuovo spettro di applicazioni, come ad esempio il monitoraggio dell efficienza energetica delle facciate degli edifici. Nei paragrafi seguenti di questo capitolo verranno presentati alcuni fra i sistemi commerciali per la ripresa di immagini oblique più interessanti presenti sul mercato. 110
158 Figura 78: Principali sistemi commerciali aerei multi-camere per la ripresa di immagini oblique. 111
159 4.6.1 System) Track Air MIDAS - (Multi-camera Integrated Digital Acquisition Il sistema MIDAS (Multi-cameras Integrated Digital Acquisition System), utilizzato per le riprese oblique, è costituito da quattro fotocamere inclinate ed una nadirale connesse ad un computer dedicato all acquisizione dei dati. Il sistema MIDAS è stato sviluppato dalla società TRACK AIR (una delle società leader nel mondo nel campo dello sviluppo software per progettazione e gestione dei piani di volo per il telerilevamento) insieme a diversi partner quali la TRIMBLE-APPLANIX e la CANON. Il sistema MIDAS è alloggiato a bordo dell aeroplano ed è installato su una speciale piattaforma che si inserisce perfettamente all interno della botola fotogrammetrica dell aeroplano. MIDAS è un sistema complesso composto da componenti hardware commerciali (fotocamere digitali, DGPS/INS e navigatore), da componenti hardware realizzati ad hoc, e da applicativi software per la pianificazione e gestione del volo, per il controllo delle fotocamera, per l acquisizione dei dati, per il processing dei dati di volo e la georeferenziazione, per la calibrazione. Figura 79: Vista interna ed esterna del sistema MIDAS installato su velivolo Camere digitali Il sistema MIDAS può utilizzare diversi tipi di fotocamere, con differenti risoluzioni; le camere digitali scelte sono molto spesso le reflex Canon EOS 1Ds Mark III. La risoluzione di questa fotocamera è di 21Mega pixel, rappresenta un ottimo compromesso tra una soddisfacente risoluzione dell immagine a terra ed un peso non eccessivo dei file risultanti, soprattutto considerando l elevato numero di scatti previsti solitamente nelle campagne di rilievo urbano a bassa quota. La serie CANON 1Ds, seppur non nasce come una macchina fotografica aerea, è un prodotto altamente affidabile; una volta calibrata, la sua geometria rimane soddisfacentemente stabile nel tempo. Inoltre, grazie al SDK (Software Development Kit) fornito da Canon, questa fotocamera può essere controllata completamente in remoto dal computer integrato nel sistema MIDAS, permettendo all operatore di cambiare tutti i settaggi durante il volo senza dover accedere al corpo macchina. 112
160 Figura 80: Installazione delle Canon EOS 1Ds Mark III sul sistema MIDAS. Le caratteristiche principali di questa fotocamera sono: Sensore CMOS a pieno formato da 21 Megapixel: le immagini sono elaborate ad una profondità colore pari a 14 bit per ottenere gradazioni cromatiche più accurate. La qualità delle immagini è garantita dall efficace riduzione del rumore alle alte sensibilità e dal filtro passa-basso che elimina l effetto moiré ed i falsi colori. 5 fps. Due processori DIGIC III: la coppia di processore garantisce le elevate prestazioni di elaborazione. Sistema AF ad area estesa e alta precisione. Sistema integrato di pulizia EOS: la Self-Cleaning Sensor Unit assicura pulizia e protezione dalla polvere ad ogni accensione. Corpo in lega di magnesio impermeabile: resistente alla polvere e all umidità, protegge EOS-1Ds Mark III. La robustezza dell apparecchio è stata testata con migliaia di ore di volo nelle condizioni più estreme Ottiche Il sistema MIDAS utilizza ottiche Zeiss appositamente costruite, calibrate e testate. La calibrazione viene realizzata da Applanix, secondo severe procedure di misurazione della distorsione dell ottica. Delle cinque macchine fotografiche, quattro, ovvero quelle inclinate di 45 rispetto al nadir, monteranno una ottica con focale da 50mm ed una, in posizione nadirale, utilizzerà una focale 25mm. Questa soluzione è stata studiata in modo tale da avere una risoluzione a terra quanto più uniforme possibile e anche per ottenere un ricoprimento confrontabile tra la ripresa verticale e quelle oblique. 113
161 Piattaforma L intera piattaforma poggia sul pavimento dell aeroplano per mezzo di sei sospensioni pneumatiche che smorzano le vibrazioni e permettono, tramite dei leveraggi, una perfetta messa in piano del sistema durante il volo; il supporto delle fotocamere è connesso alla piattaforma tramite una flangia per un montaggio rapido ed è motorizzato in modo da correggere l eventuale deriva dell aeroplano. Il motore del supporto delle fotocamere è azionato dal computer che controlla l intero sistema e che agisce in base ai parametri che riceve dal DGPS/INS. Figura 81: MIDAS Schema della piattaforma Unità di controllo MDC Il MIDAS Data Computer (MDC) è costituito da 3 sottosistemi che sono alloggiati all interno di un contenitore molto compatto: l unità fotografica, l unità di navigazione e l unità di controllo del supporto. Il MDC è un sistema altamente modulare studiato per una facile individuazione degli eventuali difetti e per un agevole manutenzione; installato sull aereo tramite un supporto metallico collegato al piano del pavimento dell aeromobile con delle sospensioni pneumatiche, permette di evitare che le vibrazioni vengano trasmesse al computer e, in particolar modo, ai dischi rigidi. I LED diagnostici e molteplici strumenti software permettono una rapida identificazione di qualsiasi anomalia hardware. 114
162 Figura 82: Unità di controllo MIDAS MDC Unità fotografica Questo insieme di computer è dedicato all acquisizione delle immagini ad alta velocità, trasferimento e salvataggio. L unità fotografica è stata progettata in modo da poter trarre un pieno vantaggio dalle capacità delle moderne macchine fotografiche digitali: è capace di attivare in continuazione 5 fotocamere con un intervallo minimo di 2,5 secondi e di salvare tutte le immagini in un unico hard drive (con un backup in tempo reale su in secondo disco). Inoltre è completata da un display per visualizzare le ultime 5 immagini scattate per effettuare un controllo della qualità e dell esposizione in tempo reale e per permettere un eventuale intervento sui parametri di acquisizione in volo. L esposizione delle 5 fotocamere viene determinato automaticamente attraverso un algoritmo sofisticato che consente di operare nei valori ottimali delle curve colore e di tagliare gli eventuali picchi. Inoltre il sistema è in grado di scambiare i settaggi delle macchine fotografiche a seconda che si stia percorrendo una strisciata, per esempio da nord a sud piuttosto che da sud a nord. In questo modo non si corre mai il rischio di avere delle fotografie sovraesposte ed altre sottoesposte a causa di un cambio di direzione nella percorrenza delle strisciate. Il salvataggio delle immagini su un unico hard drive di tipo standard comporta alcuni vantaggi operativi: L equipaggio non deve sostituire il disco durante il volo; I dati per il post-processing sono accessibili da un unico supporto, poiché su questo hard drive sono registrati anche i dati di volo registrati da XTRACK FMS (Flight Management System), inclusi i dati del DGPS/INS; Sono disponibili sul mercato dischi SATA con dimensioni sino a 4 TB che possono contenere sino a diverse centinaia di migliaia di immagini ad alta risoluzione. 115
163 Unità di navigazione L unità di navigazione è costruita intorno al noto sistema di gestione del volo XTRACK di TRACK AIR; questo sistema permette all utente di volare missioni aeree con la massima efficienza. L unita di navigazione, che integra un ricevitore GPS (ma può anche essere collegato con qualsiasi GPS esterno), invia al pilota le indicazioni necessarie per condurre l aereo lungo la strisciata programmata, tramite un display, e all approssimarsi dei punti di presa pianificati, invia un impulso alle macchine fotografiche tramite l unita fotografica. Figura 83: Unità di navigazione GPS installata sul cockpit del Partenavia P Unità di controllo del supporto fotocamere L unità di controllo del supporto fotocamere permette di controllare e compensare la deriva. Questa compensazione è particolarmente importante perché consente di ottenere l impronta a terra delle fotografie esattamente come da progetto di volo. Se non fosse presente questo componente si rischierebbe di avere uno spostamento sistematico delle immagini. La deriva può esser compensata sia manualmente con l utilizzo di una videocamera che è installata sulla base della piattaforma, sia in maniera automatica con i dati provenienti dall IMU. Figura 84: Sistema compensazione della deriva. automatico di 116
164 Sistema GPS/INS Il sistema MIDAS integra il sistema POSAV 310 IMU di Applanix. L accoppiamento dei sistemi è stato studiato ed implementato da un team congiunto tra Applanix e Track Air. POSAV è un sistema hardware e software progettato per la georeferenziazione diretta dei dati acquisiti da sensori aviotrasportati, ovvero la misura diretta della posizione del sensore e del suo orientamento nello spazio (conosciuto come parametri di orientamento esterno) senza la necessità di rilevare punti di controllo aggiuntivi sull area di interesse. Il sistema utilizza la precisione del GNSS supportata ed aumentata da misure inerziali (IMU). Il sistema POSAV: Acquisisce e calcola in modo accurato tutte le variabili di movimento, inclusi i parametri di orientamento esterno dei sensori, sia in tempo reale che in postmissione; Elimina l esigenza dell aereo-triangolazione e la necessità di completezza dei punti di controllo a terra (spesso utilizzati solo per il controllo di qualità); Semplifica e automatizza il flusso dei dati ed il processo di controllo di qualità; Permette di utilizzare un singolo modello stereoscopico per lavori di cartografia o un unico fotogramma per elaborare ortofoto utilizzando un DTM esistente. Figura 85: Installazione del sistema GPS/INS. 117
165 Assemblaggio e specifiche tecniche All interno di questo paragrafo sono riportati lo schema di montaggio del sistema MIDAS e il dettaglio delle sue caratteristiche tecniche così come riportato dalla casa costruttrice. Figura 86: Schema di assemblaggio della testa del sistema MIDAS. 118
166 Figura 87: Tabella di dettaglio delle caratteristiche tecniche da brochure Sistema modulare DigiCAM L elemento di base per la realizzazione di sistemi di multiple di IGI è la sua fotocamera digitale medio formato. Questa è basata sulla tecnologia hasselblad ed ha una struttura modulare comprendente tre unità principali: Un corpo macchina modificato; 119
167 Un dorso digitale; Una serie di lenti che devono essere calibrate da IGI. Le versioni iniziali della camera erano caratterizzate da un dorso digitale da 22megapixel. Tuttavia la stragrande maggioranza di quelli costruiti fino ad oggi hanno utilizzato i dorsi da 39megapixel consentendo la generazione di fotogrammi con un formato rettangolare di 7216x5412pixel. Le serie attuali in produzione della DigiCam sono caratterizzate da un dorso digitale da 60megapixel che si basa su nuovo chip della Dalsa. Per soddisfare le svariate esigenze dei propri clienti, IGI offre una vasta gamma di lenti per l'uso con le sue telecamere DigiCam con valori di lunghezza focale compresa tra i 28 e 300 mm. Queste lenti sono state sviluppate da Hasselblad specificatamente per l'utilizzo con le fotocamere digitali. Ogni lente della gamma viene azionato in combinazione con un otturatore a controllo elettronico che si trova nella lente e fornisce tempi di posa sul campo di 1/800 a 1/125 secondo. Il tempo minimo tra esposizioni successive con la fotocamera DigiCam-39 era di 1.9 secondi, nella nuova DigiCam-60 questa frequenza è scesa a 1.6 secondi. Oltre alla unità di camera, un sistema DigiCam completo comprende un DigiControl Sensor Management Unit (SMU) insieme a una coppia di SSD con capacità di registrazione di 6400 immagini. Il sistema comprende anche un touch-screen da 8 che fornisce tutte le informazioni on-line, come le immagini di anteprima e gli istogrammi per l operato del sistema. Figura 88: (a) Sistema modulare della camera IGI corpo macchina, dorso digitale e lenti. (b) Sistema completo DigiCam L integrazione del sistema di ripresa aerea digitale con il sistema di navigazione aerea proprio del velivolo attraverso la guida di IGI offre pieno funzionamento del sistema integrato. L aggiunta inoltre del sistema GPS/IMU della AEROControl fornisce i valori di posizione, quota e assetto del velivolo, fornendo alla camera i valori corretti per il funzionamento al momento dell esposizione, oltreché come necessario i parametri per i processi di georeferenziazione diretta e di triangolazione aerea. 120
168 Single camera system L utilizzo di un singolo sistema DigiCam è naturalmente possibile in una modalità stand-alone per l acquisizione di immagini nadirali con copertura stereoscopica. Per questa operazione di base, un semplice telaio può essere montato sul velivolo per il puntamento della camera verso la direzione nadirale. Tuttavia, generalmente, la fotocamera è montata e gestita dai supporti appositamente progettati. Questi includono un sistema senza controllo giroscopico come i vecchi Wild/Leica PAV10/20 o su un supporto giroscopico come il Leica PAV30, Zeiss T-AS & SM-2000 o Somag GSM IGI può fornire adattori di supporto per tutti questi modelli. Figura 89: Sistema IGI airborne laser system. LiteMapper - Tuttavia, fino ad ora, molte singole camere IGI DigiCam sono state fornite come parte integrante del sistema LiteMapper - airborne laser system. Per questa applicazione specifica, IGI offre il sistema completo (Laser scanner + DigiCam + CCNS flight navigation and guidance system + AEROcontrol GPS/IMU unit) montato in un DART Heli-Utility-Pod. Certificato per l utilizzo con elicotteri Eurocopter AS350/355. Il DART è una scatola in kevlar snella e molto leggera che è attacata al lato dell elicotero ed è stata modificata per accogliere l intero sistema LiteMapper. Per l utilizzo del sistema con altri tipi di elicoterri o velivoli ad ala fissa IGI può fornire sistemi di montaggio specifici, costruiti in-house in grado di ospitare il sistema completo LiteMapper. Questi box sono dotati di sistemi a molla, progettati per smorzare o rimuovere gli effetti delle vibrazioni prodotte durante il volo Two Camera System Per quanto riguarda l uso di sistemi con due macchine DigiCam, sono offerte da IGI un numero di configurazioni diverse. La prima di queste è chiamata Double-DigiCam system e prevede il posizionamento della coppia di camere in un idoneo supporto con entrambi gli assi ottici paralleli fra loro, che puntano nella direzione verticale. Questo consente due possibili modalità operative: 121
169 Nella prima vengono prodotte contemporaneamente due immagini quasi identiche del terreno a colori (RGB) e in falsi colori (CIR); Nella seconda si usano le camere per acquisire alternativamente immagini del terreno con sovrapposizione stereoscopica, volando alto o con valori di velocità che richiedono un intervallo di scatto minore di un secondo; Le esposizioni delle due camere sono sincronizzate con valori di un 1/100ms. Una seconda configurazione è chiamata Dual-DigiCam system e monta le due camere su un apposito supporto leggermente inclinato (low oblique) per il puntamento dei loro assi ottici. Anche in questo caso possono essere utilizzate due modalità operative: Nella prima configurazione le camere sono puntate in direzioni opposte, perpendicolari alla linea di volo, e gli scatti sono fatti contemporaneamente. Questo produce due immagini oblique con una stretta sovrapposizione. Le due foto possono essere rettificate e mosaicate insieme con punti di controllo e unione comuni nella parte di sovrapposizione; Figura 90: Sistema IGI Dual-DigiCAM La modalità di funzionamento alternativa opera con lo stesso sistema, ma le camere sono puntate in maniera obliqua lungo l asse di volo. Questo può essere utilizzato per acquisire doppie fotografie oblique convergenti con il 100% di sovrapposizione, se desiderato, consentendo la generazione di stereo-modelli con un favorevole rapporto base su altezza. Utilizzando la prima configurazione possono essere ottenute, utilizzando il dorso sa 60megapixel, immagini mosaicate fino a 110megapixel. La terza configurazione possibile usando una coppia di camere DigiCam è quella chiamata Dual-DigiCAM Oblique system. Come nella precedente configurazione, si usano le camere montate su supporti che puntano al suolo con una inclinazione dell asse focale di 45, non è possibile quindi in alcun modo sovrapporre le immagini 122
170 prodotte. Questa configurazione è stata progettata per produrre immagini fortemente oblique che possono fornire dettagli sulle caratteristiche degli edifici e altre strutture, oltreché essere utilizzate per la produzione di modelli 3D urbani Three Camera System IGI ha inoltre progettato un sistema di rilievo aereo Triple-DigiCAM. Questo è composto da tre camere che sono posizionate con un montaggio standard in una configurazione che prevede un frame verticale e due frame leggermente obliqui, anche in questo è prevista un altissima sincronizzazione fra le esposizioni. Selezionando le lenti di una lunghezza focale adeguata (corta), fra quelle disponibili, può essere realizzata una vastissima copertura angolare del terreno in direzione perpendicolare alla strisciata, e da orizzonte a orizzonte se richiesto. Come tutte le precedenti configurazioni, un sistema GPS/IMU può essere integrato ala sistema per fornire una misurazione continua della posizione e dell assetto del velivolo e della piattaforma su cui il sistema Triple-DigiCAM è montato. Figura 91: Esempio della copertura con sistema Triple-DigiCAM Four Camera Systems IGI ha inoltre introdotto un sistema di quattro camere basato su due differenti configurazioni geometriche e di puntamento obliquo delle camere. Nel prima configurazione, chiamata Quattro-DigiCAM system, le quattro camere sono strettamente accoppiate insieme in una configurazione a blocchi tale che tutte le quattro immagini inclinate vengano acquisiste contemporaneamente e con una leggera sovrapposizione fra i bordi. Le quattro immagini oblique risultanti possono essere rettificate in post-processing. Dopo la rettifica, le immagini raddrizzate individualmente possono essere mosaicate insieme per produrre una singola immagine composita quasi verticale con un grande formato rettangolare di 220megapixel usando i dorsi digitali da 60megapixel. 123
171 Figura 92: Immagine Quattro-DigiCam. e ricoprimento del sistema Queste immagini grande formato possono essere utilizzate per produrre modelli stereoscopici utilizzabili nelle principali workstation cartografiche. Le camere DigiCam utilizzano filtri a mosaico e interpolazione di Bayer per generare le immagini a colori e falsi colori, quindi non vi è necessità di produrre ulteriori immagini di piccolo formato per generare immagini multispettrali, senza quindi la necessità di ricorrere ad operazioni di pan-sharpening, usate invece da alcuni altri sistemi di rilievo a grande formato. E anche interessante notare come il sistema a quattro camere è installabile all interno dei sistemi di montaggio standard come la serie Wild/Leica PAV10/20/30, Zeiss SM-2000 o Somag GSM-3000per i quali IGI fornisce un adattore cilindrico. 124
172 Figura 93: Immagine e ricoprimento del sistema Quattro-DigiCam Oblique. La configurazione alternativa del sistema a quattro camere è il Quattro-DigiCAM Oblique, che ha una combinazione geometrica completamente diversa nei gli assi focali delle quattro camere sono orientati di circa 45. Due camere sono montate perpendicolarmente alla linea di volo, le altre due nella stessa direzione. È possibile notare che in questa configurazione le quattro camere acquisiscono simultaneamente l immagine e non c è nessuna sovrapposizione fra esse. Così come nel sistema DualDigiCAM Oblique, le immagini acquisite sono usate nella produzione di 3D City Model. Nonostante la diversa configurazione geometrica ed il largo punto di vista obliquo, le camere sono montate in un alloggiamento standard. In alternativa, dipendentemente dallo spazio disponibile nel velivolo, possono essere montate su uno specifico supporto prodotto dalla IGI Five Camera System Il sistema a 5 camere che è stato introdotto da IGI è il Penta-DigiCAM. Questo è composto dal una camera nadirale DigiCAM equipaggiata con una lente grandangolare (f=28mm) che produce un immagini quasi nadirale del terreno. Questa camera centrale è affiancata da altre 4 camere DigiCAM che sono equipaggiate con lenti da 150mm, che simultaneamente acquisiscono le immagini oblique del terreno. Due di queste camere oblique sono perpendicolari alla linea di volo, e due parallele. Ognuna delle quattro immagini oblique ha una stretta sovrapposizione con l immagine nadirale. La copertura del suolo risultate crea il distintivo simbolo della croce maltese, che dà il nome all intera categoria di questi sistemi. Questo tipo di configurazione molto particolare, Che riale originariamente al 1930, è stata ripresa in periodo più recente dal sistema Pictometry e dai suoi licenziatari. Tuttavia queste aziende lavorano essenzialmente come fornitori di servizi, concedendo le loro immagini in licenza agli utenti. Al contraio IGI, agisce 125
173 come integratore di sistemi, fornendo il suo sistema di rilievo aereo Penta-DigiCAM ad aziende di rilievo aereo indipendenti. Figura 94: Immagine e ricoprimento del sistema Penta-DigiCAM. Il sistema IGI genera immagini digitali di medio formato, piuttosto che piccolo formato, come invece succede in altri sistemi concorrenti. Anche il sistema penta così come le configurazioni precedenti, possono utilizzare le camere a 40, 50 e 60 e 80megapixel, ed essere montato su un sistema di montaggio girostabilizzato per l utilizzo all interno del velivolo Caratteristiche tecniche delle camere DigiCAM Come detto il sistema modulare di IGI può montare nelle diverse configurazioni diversi modelli di dorso digitale per l acquisizione di immagini a risoluzione diverse. Di seguito sono indicate le caratteristiche delle diverse camere DigiCAM, così come riportati dal produttore. 126
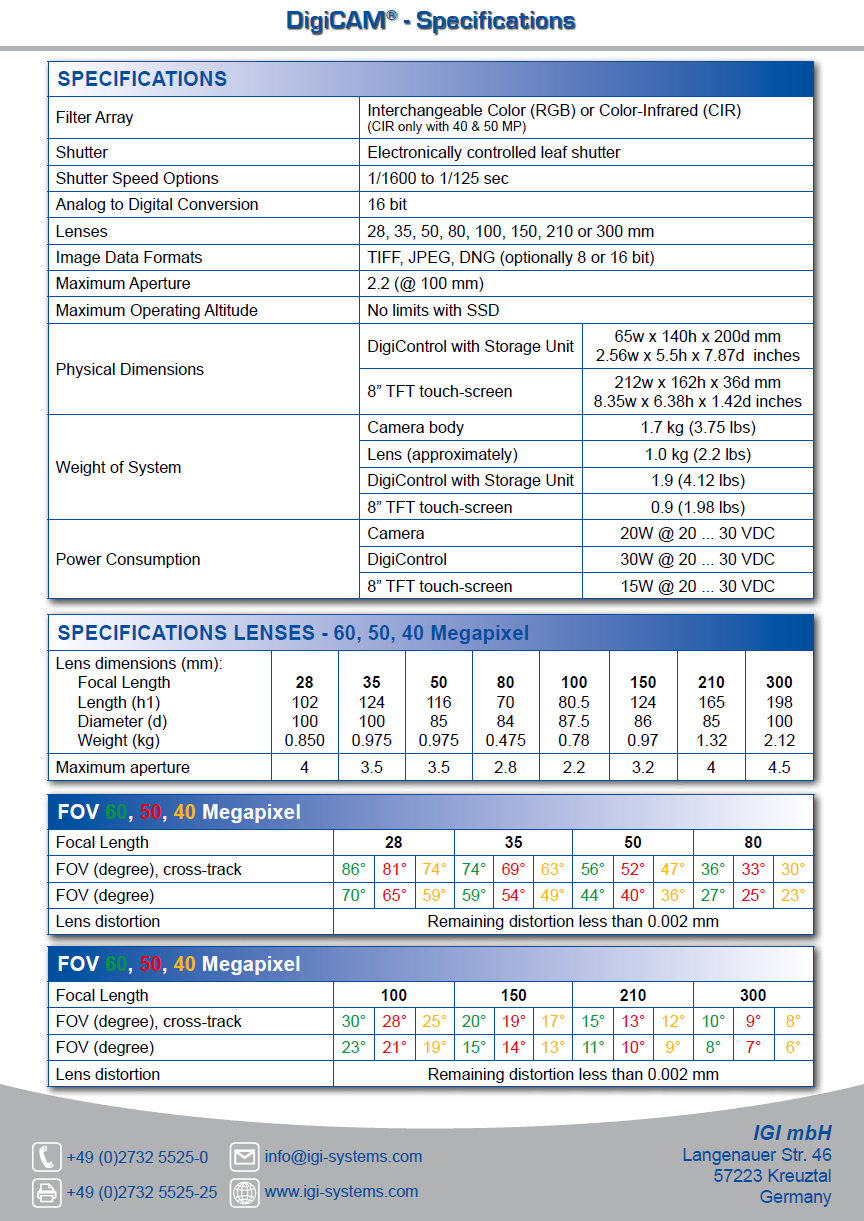
174 127
175 4.6.3 Microsoft UltraCam Osprey La camera UltraCam Osprey è stata presentata per la prima volta alla conferenza ASPRS del 2013 e mostrata a Baltimora nel marzo del Figura 95: Osprey. Microsoft UltraCam Nonostante questa non sia la prima camera per riprese oblique presentata sul mercato, questa incorpora diversi concetti nuovi ed unici mettendo un chiaro accento sulla fotogrammetria professionale e la produttività del rilievo. In primo luogo il componente nadirale è di tipo metrico derivato dalla più nota camera UltraCam Lp, Questa camerale nadirale costituisce ossatura portante geometrica della UltraCam Osprey e consente unire nello stesso strumento i processi fotogrammetrici tradizionali con il rilievo delle immagini oblique. Per esempio, le immagini prodotte sono compatibili con il software UltraMap e possono essere utilizzate nel flusso di lavoro classico di aero-triangolazione e per la creazione di densi modelli di superfice e la creazione di ortofoto. In secondo luogo, aggiungendo i sei corpi macchina obliqui rende i processi di acquisizione estremamente produttivi. I coni puntano nelle quattro direzioni cardinali inclinati di 45. CI sono due coppie di coni avanti e indietro, e singoli coni a destra e sinistra The UltraCam Osprey design Ci sono 10 indipendi coni integrati dentro un singolo sistema camera Osprey. Quattro coni costituiscono la classica camera nadirale per la creazione di una immagine pancromatica da 90megapixel, così come uno per l RGB e per l immagine NIR. I restanti sei coni sono dotati di lenti da 80mm e prismi ottici di altà qualità. I coni che guardano avanti e indietro nella direzione di volo sono assemblati a due a due, allargando notevolmente il campo visivo perpendicolare alla direzione di volo. La tabella seguente mostra i principali parametri del sistema di camere UltraCam Osprey. 128

176 Figura 96: UtraCAM Ospery footprint e diagramma FOV La progettazione della camera è stata orientata alla produttività in volo. Pertanto l entità dell impronta nadirale e la traccia della dimensione trasversale sono ben proporzionati tra loro. Volando ad una altitudine di 1275m si produce un immagine nadirale di 15cm di GSD e con una copertura di 1750x1127m. Nelle direzioni destra e sinistra rispetto all asse di volo, le immagini ottenute si combinano senza soluzione di continuità producendo un immagine con campo visivo di 115. La dimensione di quest impronta è superiore ai 1135m. Questo supporta un modello di volo in cui la distanza dalla linea di volo è il 60% della superficie di appoggio nadirale (il 40% di sovrapposizione laterale). Ad una velocità al suolo di 60m/sec il frame rate della UltraCam Osprey è di circa 0,45 immagini/secondo (2.2secondi TBFR). 129
177 Image quality La tecnologia del sensore e le relative performance radiometriche della UltraCam Osprey sono in line con l alto livello di qualità dei sensori della famiglia UltraCam. Le teste della camera Osprey sono dotati di sensori ed elettronica di ultima generazione che sono ottimizzati per evidenziare livelli di rumore molto bassi manifestandosi in immagini quasi prive di rumore e di altissima gamma. La conversione analogico digitale è attuata con convertitori a 14 bit e tutto il processo di elaborazione delle immagini digitali è implementato a 16bit. Le immagini risultanti sono di altissima qualità e mostrano un ampio range dinamico. Figura 97: Esempio di immagina obliqua prodotta con camera Osprey Workflow e risultati 3D Poiché ogni immagine nadirale è accompagnata da sei immagini oblique supplementari, il sistema Osprey produce un numero piuttosto elevato di immagini durante una missione di volo. Quindi è evidente necessaria una catena fortemente automatizzata di elaborazione dei dati, in maniera da estrarre a costi economicamente vantaggiosi tutti le informazioni presenti nei dati. 130
178 Figura 98: DSM prodotto da nuvola di punti generata da immagini Osprey La combinazione di immagini altamente ridondanti e accurate consente di creare DSM di straordinaria fedeltà e precisione. Questo rende molto più semplice estrarre le informazioni geometriche dai dati, per poi procedere alla texturizzazione delle geometrie, col fine di produrre modelli tridimensionali completamente texturizzati. Soprattutto in ambienti urbani, la qualità delle immagini originali combinata con la capacità di acuiqsire tutte le facciate verticali di strutture artificiali sono gli ingredienti fondamentali per ottenere un modello 3D con un alto grado di automazione. Nella figura seguente è mostrato il risultato del processo di produzione del modello tridimensionale. 131
179 Figura 99: Modello 3D generato con DSM e texture prodotte da UltraCam Osprey 132

180 Techical Specification Di seguito le specifiche tecniche della camera così come riportato dal produttore. 133
181 4.7 LiDAR - Airborne Laser Scanning Introduzione alla tecnologia LiDAR è l acronimo per Light Detection And Ranging. Questa recente tecnologia, che è in grado di rilevare le differenze in elevazione, è usata per determinare le forme della superficie del terreno includendo gli elementi naturali ed artificiali. Il LiDAR è utilizzato per mappare elementi topografici come l altezza e la densità di oggetti in rilievo sulla superficie terrestre, come alberi ed edifici. Figura 100: LiDAR data is collected from aircraft by firing laser beams to the earth. I dati LiDAR grezzi, anche chiamati nuvole di punti, sono raccolti da aereo mediante invio di fasci laser, nella lunghezza d onda del visibile e dell infrarosso vicino, verso il terreno. Quando intercettano un elemento solido, i fasci laser sono riflessi verso il sensore LiDAR. I valori di elevazione (object height) sono calcolati attraverso la misurazione del tempo richiesto al segnale per coprire la distanza fra sensore ed oggetto e tornare indietro. Un sistema LiDAR è costituito da tre componenti per il rilievo accurato dei valori di quota: Pulse Time Coordinates of the Pulse Altitude of the Aircraft Il laser trasmette un impulso che è riflesso da un oggetto verso il sensore. Il sensore registra il tempo di percorrenza per migliaia di impulsi laser al secondo. Un sistema di GPS a doppia-frequenza è utilizzato per georeferenziare i punti laser e memorizzare l attuale quota al terreno. Un dispositivo GPS è operativo sull aereo, gli altri sono utilizzati a terra. Un sistema di navigazione inerziale (INS) è usato per memorizzare l assetto in quota dell aereo. I dati ricavati dal sistema di GPS/INS sono poi associati come dati ai singoli impulsi laser. 134
182 Figura 101: Lidar collection system data Con queste informazioni (pulse time, coordinates of the pulse, altitude of the aircraft), la quota degli edifici e degli altri oggetti in rilievo o entità topografiche può essere calcolata nel modo seguente: Per l impulso è memorizzato il tempo di percorrenza andata e ritorno fra sensore ed oggetto colpito ( T ). Il tempo di percorrenza è moltiplicato per la velocità dell impulso laser. Le onde elettromagnetiche del laser viaggiano alla velocità della luce, per cui la velocità dell impulso laser è uguale alla velocità della luce ( c ). Il valore risultante è diviso per 2, ottenendo quindi il valore della distanza ( d ) percorsa dal fascio laser dal sensore alla superficie dell oggetto a terra. Il valore della distanza fra dal fascio laser ( d ) è usato per derivare l elevazione degli oggetti ( o ) attraverso sottrazione dalla quota operativa dell aeromobile ( a ). Infine, l elevazione del livello del terreno ( z ) in corrispondenza delle coordinate planimetriche dell impulso laser, acquisite attraverso l unità GPS, è sottratta dall elevazione dell oggetto ( e ) per ottenere un dato corretto di elevazione degli oggetti ( e* ). 135
183 4.7.2 Multiple Reflections Gli impulsi laser possono avere riflessi multipli da una singola emissione di fascio laser, consentendo una modellazione dettagliata della superficie del terreno. Parte del fascio laser può colpire un oggetto solido e restituire il riflesso al sensore, mentre il resto del fascio continua verso il terreno. Questo accade comunemente nelle zone urbane e forestate. I riflessi multipli dell impulso laser possono determinare superfici intermedie, come per esempio le gronde degli alberi, fornendo i dati di elevazione per gli altri oggetti del terreno. Teoricamente, il primo impulso colpisce le foglie in cima alla fronda mentre l ultimo attraversa gli spazi vuoti fino a colpire il terreno sotto la fronda. I riflessi multipli consentono di creare un migliore modello delle superfici, in quanto da questi è possibile ricavare collezioni di molti punti al terreno nelle aree urbanizzate e forestate. Figura 102: Un singolo impulso può incontrare diverse superfici prima di incontrare il terreno per essere riflesso definitivamente Data collection I dati dei punti LiDAR sono acquisiti tramite scansioni sequenziali simili a spazzolate sul terreno. Lo spessore delle strisciate e la sovrapposizione fra scansioni parallele è variabile. Gli impulsi laser possono essere generati attraverso una griglia densa e regolare, con spazi uguali fra linee di scansione e impulsi laser per tutta la spazzolata, in un modello a S, Z o circolare. Ogni impulso laser riflesso è costituito da una punto tridimensionale con coordinate x, y e z, dove x è longitudine, y latitudine e z quota. 136
184 Figura 103: Modalità di acquisizione dei dati Lidar Intensity L intesità con cui l impulso laser è riflesso, è generalmente conservato insieme agli altri dati. Un buon dato di intensità produce un immagine comparabile con una fotografia in bianco e nero. Il dato di intensità può essere utilizzato per la visualizzazione dei dati o come riferimento per l estrazione di features. A B Figura 104: La stessa immagine senza l applicazione del dato di intesità (sinistra) e con l applicazione dell intensità (destra) 4.8 LiDAR Data I dati LiDAR possono essere integrati con altre tipologie di datasets, incluse ortofoto, immagini multispettrali, iperspettrali e pancromatiche. Il LiDAR viene integrato con i dati GIS ed altri da rilievo topografico, per la generazione di cartografia, modellazione tridimensionale avanzata dell edificato e del territorio in genere, oltre 137
185 che per la produzione di mappe di alta qualità. I dati LiDAR sono utilizzati nelle attività di gestione delle aree forestate, modellazione urbana, uso del suolo, rilievo topografico, ingegneria, difesa ed intelligence. I set di dati LiDAR contengono un enorme numero di informazioni di elevazione, incluse edifici, alberi, linee elettriche, e molti altri elementi visibili, che solitamente non sono accessibili in database GIS. Questi dati, completamente digitali, sono immediatamente disponibili per la produzione di DEMs con una precisione in quota compresa fra 0.15m e 1m. I risultati prodotti includono curve di livello, carte di esposizione e pendenza, ortofoto in 3D, visualizzazione di ambienti di realtà virtuale, e altro. I due dati principali restituiti derivati dal dato LiDAR grezzo sono un last-return data file, spesso accompagnato dal first-return data file First and Last Returns Ogni fascio di luce trasmesso alla superficie terrestre dispositivo laser può restituire uno o più (fino a 5) impulsi. Ogni segnale riflesso, o impulso, è definito come porzione di un fascio di luce che colpisce la superficie di un oggetto e torna verso il sensore. Nelle aree che contengono superfici più piccole del raggio del fascio laser, riflessi multipli possono quindi essere possibili. Quando il fascio di luce entra in contatto con un oggetto in maniera che accidentalmente una parte dell energia viene riflessa verso il sensore, la parte rimanente continua la sua discesa verso il suolo fino a quando entra in contatto con un altro oggetto solido. Nessun ulteriore oggetto nel percorso del fascio laser viene restituito se l energia riflessa non è sufficiente per consentire all impulso di ritornare verso il sensore. La prima porzione del fascio che colpisce un oggetto, come un ramo o le fronde di un albero, e che torna indietro verso il sensore è chiamato first-return (primo eco). La porzione del fascio che invece colpisce l ultimo oggetto solido (che può essere il terreno) e restituisce il suo eco al sensore è chiamata last-return. Nel contesto dei dati LiDAR, first e last returns sono definiti come di seguito: First-returns Una combinazione di tutte le classi di dati ricevuti come primo eco da ogni impulso laser. I First-return data contengono le informazioni di quota relative alle prime o uniche superfici che l impulso LiDAR ha colpito. 138
186 Last-returns Contiene una combinazione di tutte le classi di dati ricevuti come ultimo eco di ogni impulso laser. Queste sono le ultime superfici che il LiDAR ha incontrato, contiene quindi le quote relative agli echi dal secondo all ultimo. Figura 105: Gli impulsi Lidar colpiscono una varietà di oggetti a terra, le frecce rosse sono i fasci che restituiscono un unico valore, quelle blu sono invece i valori multipli Figura 106: Un singolo fascio può restituire un primo, secondo (intermedio) o ultimo risultato Dato che il primo eco contiene le quote degli oggetti più alti (il fascio di luce colpisce prima gli oggetti alti) e l ultimo eco con forte probabilità restituirà la quota della superficie, utilizzando entrambi i dati first e last returns possono essere usati per estrarre edifici, alberi e la quota della superficie terrestre. Gli echi fra il primo e l ultimo sono spesso relativi ad oggetti di quota intermedia, come rami d albero, e sono spesso utili per lo studio delle aree forestate e volumi di biomassa Point Clouds I dati LiDAR grezzi (non classificati) derivati direttamente dalle agli impulsi del laser sono conosciuti come nuvole di punti. I riflessi multipli del fascio laser creano una nuvola di punti multi-return. Come minimo, i punti della nuvola contengono i valori di elevazione per ogni eco, con ogni punto definito dalla tripletta di valori contenente le coordinate x,y e z. 139
187 Figura 107: Nuvole di punti in 3D relative ai first return e last return La densità della nuvola di punti è solitamente specificata al momento della progettazione del rilievo LiDAR. Secondo il sensore di acquisizione LiDAR, il formato e i campi richiesti dal project manager, la nuvola di punti può contenere informazioni addizionali quali l intensità, time, e altitudine dell aereo. I dati della nuvola punti possono essere strutturati in diversi formati, dall ASCII (text, CSV, etc ) a binario (bin, LAS, formati proprietari). In modo crescente, la domanda degli utenti, per la distribuzione dei dati si sta indirizzando verso i LAS files, che sono standardizzati tipicamente di dimensioni ridotte, ed utilizzabili in molteplici applicazioni Nominal Point Spacing La Nominal Point Spacing (distanza nominale fra i punti) definisce il numero medio di misurazioni che il produttore realizza per le singole unità d area sull intero data-set, definisce quindi la risoluzione della nuvola di punti. Talvolta questa risoluzione è anche detta numero di punti per unita d area. I due valori sono strettamente relazionati, ad un alto numero di punti per unità d area corrisponde un valore basso per la distanza nominale fra i punti della nuvola LiDAR. Così come il numero di pixel descrive la risoluzione di un immagine digitale, la distanza nominale fra i punti (o il numero di punti per metro quadro, o altra unità di superficie) descrive la risoluzione della nuvola di punti. Diversamente dalle camere digitali che normalmente hanno una risoluzione o numero di pixel fissati, un rilievo LiDAR può essere volato basso o lento per incrementare la sua risoluzione. Così come una macchina per rilievi 140
188 fotografici digitali, che ha un alta risoluzione e può acquisire oggetti piccoli nella scena, una nuvola di punti che ha una distanza piccola fra i punti può consentire di discriminare e riconoscere oggetti molto piccoli rispetto al terreno che è stato rilevando. 4.9 Airborne Laser Scanner Riegl LMS Q560 Il Riegl LMS-Q560 è un rivoluzionario laser scanner 2D sviluppato utilizzando gli ultimi stati di avanzamento delle tecniche di acquisizione ed elaborazione di segnali digitali, e riunisce le principali tecnologie relative alla scansione laser da aereo. Tale dispositivo consente l acquisizione di dettagliati parametri obiettivo direttamente dalla digitalizzazione dell eco del segnale durante il rilievo, e successivo postprocessing delle forme d onda. Questa metodologia è particolarmente utile quando si devono svolgere difficili compiti operativi, come l analisi di volumetrie e forme dei tetti nell urbano o classificazione degli oggetti. Figura 108: Installazione del Riegl LMS Q560 su velivolo Partenavia P68 I parametri operativi del RIEGL LMS-Q560 possono essere configurati per coprire un ampio spettro di applicazioni. Dispone inoltre di una completa interfaccia che consente un agevole integrazione dello strumento in un completo sistema di rilievo aereo. Lo strumento è estremamente robusto, quindi ideale per l installazione a bordo degli aerei. Inoltre, è abbastanza compatto e leggero per essere installato in velivoli mono o doppio motore, elicotteri o UAV. 141
189 4.9.1 Digitalizzazione dell'eco nel RIEGL LMS-Q560 Le funzionalità di digitalizzazione del RIEGL LMS-Q560 permette all utente di estrarre un gran numero di informazioni corrette dall eco del segnale. La figura 109 illustra un rilievo dove le misurazioni vengono effettuate su 3 tipologie diverse di oggetti. Il rosso rappresenta gli impulsi dei segnali laser che viaggiano verso l obiettivo alla velocità della luce. Quando il segnale interagisce con una superficie riflettente, una frazione del segnale trasmesso è riflessa verso lo strumento laser, indicati nella figura dai segnali blue. Figura 109: Eco dei segnali risultante dai differenti tipi di target Nella situazione 1, l impulso laser colpisce prima le fronde dell albero che causano tre diversi impulsi di eco. Una parte dell impulso laser colpisce il terreno restituendo un ulteriore impulso. Nella situazione 2, il laser viene riflesso da una superficie piatta con un piccolo angolo di incidenza, ottenendo un lungo eco di risposta. Nella situazione 3, l impulso è invece riflesso da una semplice superficie piatta a incidenza normale, ne risulta un eco di risposta con una forma identica a quella dell impulso trasmesso dal laser. La linea superiore del diagramma di acquisizione mostra il segnale analogico: il primo impulso (rosso), si riferisce alla frazione dell impulso laser trasmesso, i tre impulsi successivi (blue) corrispondono al riflesso dei rami dell albero; l ultimo impulso corrisponde all eco del terreno. 142
190 Figura 110: Acquisizione dei dati e post-processing Questo eco analogico è campionato ad intervalli di tempo costanti (linea intermedia della sezione ACQUISITION) ed è, in seguito, convertito da analogico a digitale, ottenendo quindi un flusso di dati digitali (linea in basso). Questa data stream è memorizzato dal RIEGL Data Recorder per la seguente operazione di postprocessing, come indicato nella sezione POST-PROCESSING del diagramma in figura. Basato sulla lunga esperienza RIEGL nella progettazione e costruzione di dispositivi laser per l industria, il LMS-Q560 memorizza le informazioni complete del segnale di eco su un ampio range dinamico. Pertanto, nella fase di post-processing i segnali possono essere perfettamente ricostruiti e analizzati in dettaglio per ricavare la distanza dal target, e gli altri parametri con assoluta precisione. 143

191 4.9.2 Dati tecnici del RIEGL LMS-Q
192 Technical Report TR D3.5.3 Analisi dello stato dell'arte sulle tecniche di modellazione dei POI e definizione di un modello di POI Il presente documento costituisce il technical report TR D3.5.3 previsto nel report di ricerca D3.5 Relazione su scenari, modelli implementativi e specifiche architetturali/funzionali di soluzioni di image processing ed information processing per la generazione massiva di punti di interesse georeferenziati nei parchi impliciti (smartspotting) del progetto NeoLuoghi.
193 Indice 1 Introduzione Stato dell arte POIplaza GPS Data Team Bing Google MapPoint World Map of UNESCO's Points of Interest (POI) OpenPOIs GEOsiti luoghi, itinerari, punti di interesse della Città di Napoli Cagliari Turismo, portale turistico della Città di Cagliari Punti di Interesse Turistico della Regione Marche Punti di Interesse della Città di Berna Punti d'interesse Parco Etna Punti di Interesse della Città di Brescia Portale del Territorio Immagine decorativa Comunità Valsugana e Tesino Punti di Interesse della Riviera Romagnola Punti di Interesse di Palau Aree Protette del Po e della Collina Torinese Categorie POI per navigatori satellitari GeoNames OpenStreetMap Pagine Gialle Modello di POI ID Lingua Descrizione Sistema di riferimento Geometria Posizione baricentro Categoria Contatti Web URI Tag Data aggiornamento Autore Note Classificazione dei POI Categorie POI Ricettività Ristorazione Cultura Servizi Tempo libero Trasporti Turismo Storia
194 Natura Negozio Altro Sinonimi Categorie POI Ricettività Ristorazione Cultura Servizi Tempo libero Trasporti Turismo Storia Natura Negozio Tag POI Ricettività Ristorazione Cultura Servizi Tempo libero Trasporti Turismo Storia Natura Negozio Sinonimi Tag POI Diagramma ER Script SQL Acronimi Bibliografia
195 Figure Figura 1: Poiplaza Figura 2: GPS Data Team Figura 3: Bing Figura 4: Google Figura 5: World Map of UNESCO's Points of Interest Figura 6: GEOsiti luoghi, itinerari, punti di interesse della Città di Napoli Figura 7: Cagliari Turismo, portale turistico della Città di Cagliari...24 Figura 8: Punti di Interesse della Città di Berna Figura 9: Portale del Territorio Immagine decorativa Comunità Valsugana e Tesino...29 Figura 10: OpenStreetMap Figura 11: Pagine Gialle Figura 12: Diagramma ER Data Base di POI
196 1 Introduzione In termini generali1, un point of interest o POI è un luogo in uno spazio fisico per il quale sono disponibili informazioni ovvero un POI associa informazioni ad una posizione geografica sulla superficie terrestre. Un POI può essere semplice come un insieme di coordinate a cui è associato un identificatore, o più complesso come un modello tridimensionale di un edificio a cui sono associati un indirizzo, nomi in più lingue, informazioni sugli orari di apertura e chiusura, etc. I POI (e le informazioni ad esso associati) hanno numerosi utilizzi incluso realtà aumentata, giochi social networking basati sulla localizzazione, geocaching, creazione di mappe e tematismi, sistemi di navigazione, etc. Nonostante la pervasività del concetto di POI e la sua diffusione in numerosissimi ambiti, gli sforzi per definire uno standard internazionale per le specifiche e i formati di interscambio dei POI sono stati, fino ad oggi, limitati. Solo recentemente, principalmente per interessi commerciali legati allo sviluppo esponenziale della pubblicità localizzata e dei social network, sono stati istituiti gruppi di lavoro dedicati a questo scopo. Nel 2010 è stato istituito dal World Wide Web Consortium (W3C) un gruppo di lavoro dedicato ai POI. Il consorzio W3C è una comunità internazionale in cui le Organizzazioni Membro, uno staff full time e gli utenti lavorano insieme per sviluppare standard Web. Il W3C sviluppa specifiche tecniche e linee guida mediante un processo definito per massimizzare il consenso riguardo al contenuto di un technical report al fine di assicurare un'alta qualità tecnica ed editoriale, e conseguire l'appoggio del W3C e della comunità. Tra le tecnologie di interesse per W3C ricordiamo: Progettazione Web e Applicazioni; Architettura del Web; Semantic Web; Tecnologia XML; Web di Servizi; DIsposiitivi Web. Il gruppo W3C, nel maggio 2011, ha pubblicato il Points of Interest Core W3C Working Draft e nel marzo 2012 è stato pubblicato il Points of Interest Core, W3C Editor's Draft. Il gruppo W3C tuttavia non ha completato il proprio lavoro. Nel dicembre 2013, solo alcuni mesi fa, il Technical Committee del Open Geospatial Consortium (OGC) ha approvato la creazione di un OGC Point of Interest (POI) Standards Working Group (SWG). Il consorzio OGC è un'organizzazione internazionale no-profit che ha lo scopo di definire specifiche tecniche per i servizi geospaziali e di localizzazione. Il consorzio OGC è formato da oltre 470 membri (governi, industria privata, università) con l'obiettivo di sviluppare e realizzare standard aperti per il contenuto, i servizi e l'interscambio di dati geografici. Le specifiche definite da OGC sono pubbliche e disponibili gratuitamente. Ci sono oltre 50 standard gestiti dal consorzio OGC e il consorzio OGC ha una relazione stretta con Oltre a questa definizione esistono definizioni più complesse legate ai termini geografici correlati tra loro di punto di interesse (point of interest), posizione/ubicazione (location) e luogo (place). Queste definizioni non sono prese in considerazione. Per maggiori dettagli si vedano le analisi del gruppo di lavoro sui POI W3C. 1 5
197 ISO/TC211 (Geographic Information/Geomatics). Le specifiche progressivamente sostituite dagli standard ISO della serie OGC di tipo abstract sono Il gruppo OGC appena istituito ha il compito di sviluppare specifiche di codifica standard per i POI. Ad oggi non ha prodotto alcun risultato. La mancanza di fatto di uno standard di riferimento per le specifiche dei POI ha condotto a procedere come segue: 1. è stata effettuata una valutazione critica dello stato dell arte esaminando le principali tecniche di modellazione e realizzazioni di POI esistenti; 2. successivamente si è proceduto con una definizione ad hoc di un modello originale di POI che risponda alle esigenze del progetto di ricerca: conforme con i requirement del progetto di ricerca; semplicità di utilizzo; flessibilità e scalabilità in maniera tale poter essere facilmente manutenuto ed esteso. Inoltre si è ritenuto opportuno, ove possibile, riprendere le parti consolidate del W3C Working Draft che si pensa costituiranno il fondamento anche del futuro lavoro del OGC Point of Interest Standards Working Group. Infine in questo documento è anche descritto il diagramma Entity-Relationship (ER) relativo alla progettazione logica di un Data Base di POI rispondente al modello concettuale individuato. Il Data Base di POI progettato è indipendente dall applicativo che andrà ad utilizzare le informazioni in esso contenute. Per completezza, sono anche riportati gli script SQL da utilizzare per la sua creazione. 6
198 2 Stato dell arte Di seguito si riportano le principali realizzazioni esistenti con specifico riferimento ai temi del progetto di ricerca POIplaza POIplaza2 costituisce una della maggiori banche dati di POI a livello mondiale, contiene circa 5,5 milioni di POI di 218 nazioni suddividi in 3258 categorie. I POI sono strutturati secondo il seguente modello: nazione; gruppo; categoria; nome; coordinate geografiche; indirizzo (opzionale); numero di telefono (opzionale); sito web (opzionale); Uniform Resource Identifier (URI) di una risorsa generica che può essere un indirizzo Web, un documento, un'immagine, etc. (opzionale); tag; icona per la rappresentazione grafica. I POI possono essere visualizzati e scaricati gratuitamente in 21 formati diversi a seconda del device fisico su cui devono essere visualizzati. Di seguito sono elencati i gruppi definiti in POIplaza: Accomodation Administration, Office, Public Institution, Police Adult Only Armed Forces Art Attractions Banks & ATM Bicycle Bus Business & Event Center Cars, Motorbikes, Vehicles Communications Company, Manufacturer & Grower Computing Cosmetology Courier 2 Public Transport Real Estate Religion & Piety Rent-a-Car, Rent-a-Boat, Rent-a-Bike Science Service Speedcam Sport, Relaxation & Leisure Stores & Shops Stores - Agriculture Stores - Bakery Stores - Beauty Stores - Bio Stores - Bonus Stores - Books & Newspapers Stores - Building Material Si veda 7
199 Crime & Security Stores - Carnival Culture & History Stores - Clothing & Textile Dangerous Section Stores - Delicacy Diplomacy Stores - Electronic Appliances Do It Stores - Electronics Education Stores - Eyeware Energy Stores - Florist & Horticulture Fair Stores - Food Fashion Stores - Furniture & Furnishings Festive Stores - Gift Filling Station Stores - Hiking & Mountaineering Food & Beverages Stores - Household Appliances Food & Beverages - Coffee & Sweets Stores - Kids & Toys Food & Beverages - Fast Food Stores - Office Supplies Food & Beverages - Fish Stores - Outlet Food & Beverages - Grill Stores - Paint Food & Beverages - Internet Stores - Perfumes & Drugstore Food & Beverages - Milk Stores - Photo & Video Food & Beverages - Motorway Rest Area Stores - Second Hand Articles Food & Beverages - Pizza Stores - Shading Food & Beverages - Sports Bar Stores - Shoes & Leatherware Food & Beverages - Sushi Stores - Shopping Center, Mall Food & Beverages - Vegetarian Stores - Spare Parts Food & Beverages - Wine, Beer & Spirits Stores - Sport Fun & Pleasure Stores - Stationery Games Stores - Supermarket & Hypermarket General Stores - Sweets & Chocolate Geography & Nature Stores - Tobacco Health, Medicine & Care Stores - Tools Hobby Toll Gate & Toll Insurance Tourism & Trip Luxury Tourism in Hungary Market Traffic Media Traffic Control Motoring Club Travel Agency Music & Dance Truck Navigation Weather Organization Wellness & Fitness Parking WiFi Pets Ciascun gruppo è suddiviso rigidamente in categorie. Ad esempio il gruppo Accomodation è suddiviso in: Abbázia Group Accent Hotels Adagio City Aparthotel Adina Apartment Hotel All Seasons Hotel All Suites Appart Hotel Arcantis Hotel Barceló Bed & Breakfast Best Western Hotel Bidget Motels Hostel Hotel Hotel Balladins Hotel Beremend Rose Hotel Express Norge Hotel Formule 1 Hotel Indigo Hotel Lucien Barriere Hotel Sziget Ibis Budget Hotel Ibis Hotel 8
200 BikerHotel BlueGreen Resorts Brit Hotel Britannia Hotels Buddha-Bar Hotel Campanile Candlewood Suites Choice Hotels Citotel College/Jugendherberge Comfort Inn Crowne Plaza Danubius Hotels Days Inn De Vere Design Hotel Dorint Doubletree Drury Inn & Suites easy Hotel Embassy Suites Etap Hotel Exploris Fairmont Hotel Falkensteiner Fasthotel First Hotel GEO Holiday Gites de France Gromada Hampton Inn Hilton Holiday Inn Holiday Inn Express Homewood Suites Ice Hotel InteContinental Istvan Hotel Kyriad La Quinta Les Grand Tables Suisse Logis Marriott Mercure MGallery Motel Motel 6 Mountain Lodge Mövenpick Hotel Novotel Polish Prestige Hotels & Resorts Pontins Holiday Parks Pousada de Juventude Premier Inn Premiere Classe Hotels Pullman Qualys Hotel Radisson Ramada Relais & Chateaux Romantik Room to Rent Scandic Hotels Sheraton Sofitel Start Hotel Staybridge Suite Novotel Super 8 Motel Wake Up Zara Hotel Le categorie utilizzate sono un mix per individuare feature semantiche (Bed & Breakfast, Hotel, Motel, etc.) e oggetti specifici (Holiday Inn, Best Western Hotel, Sheraton, etc.). La scelta dei gruppi e delle categorie effettuata non appare soddisfacente in quanto crediamo priva di semplicità e genericità. 9
201 Figura 1: Poiplaza GPS Data Team GPS Data Team3 fornisce specifici tool (POI Editor, POI Manager, POI converters, Geocoder, Geotagger, etc.) per la gestione dei POI utilizzati nei navigatori satellitari. I POI possono essere visualizzati e scaricati gratuitamente in numerosi formati diversi a seconda del navigatore satellitare su cui devono essere visualizzati. I POI sono strutturati secondo il seguente modello: nazione; categoria; tipologia; nome; coordinate geografiche; indirizzo (opzionale); numero di telefono (opzionale); descrizione (opzionale); 3 Si veda 10
202 icona per la rappresentazione grafica. Le categorie sono definite in base alla nazione di riferimento. Nel caso dell Italia le categorie definite in GPS Data Team sono: Accommodation; Automotive; Petrol; Recreation; Restaurants; Road Safety; Shopping; Tourist locations; Transportation; Local POIs; Custom POIs. Ciascuna categoria è suddivisa rigidamente in tipologie a loro volta dipendenti dalla nazione di riferimento. Ad esempio, nel caso dell Italia, la tipologia: Accomodation è suddivisa in: 1. Accor Hotels 2. Ramada 3. Marriott 4. Budget accommodation 5. Hotels 6. Campanile Hotels 7. Motels 8. Bed & Breakfast 9. Camping Restaurants è suddivisa in: 1. McDonald's 2. Burger King Shopping è suddivisa in: 1. H&M Stores 2. Shoe Stores 3. IKEA stores 4. Pharmacy 5. Penny Market 6. Lidl. 7. Auchan Stores 8. Carrefour Tourist locations è suddivisa in: 1. Embassies 2. Theatres 3. Tourist sites 11
203 4. Castles 5. Museums La scelta di categorie e tipologie utilizzata non appare soddisfacente in quanto crediamo priva di completezza e genericità. Figura 2: GPS Data Team Bing Bing4 è il motore di ricerca di Microsoft. L'obiettivo di Bing è quello di competere con Google e nel luglio 2012 si è posizionato al secondo posto tra i motori di ricerca più utilizzati negli Stati Uniti, essendo stato utilizzato mediamente per il 15,7% delle ricerche mondiali, rispetto al 66,8% di Google e al 13% di Yahoo!. Bing ha le funzionalità di mapping ed attraverso queste gestisce i propri POI strutturati secondo il seguente modello: categoria; sotto-categoria; nome; coordinate geografiche; indirizzo; numero di telefono (opzionale); Uniform Resource Identifier (URI) di una risorsa generica che può essere un indirizzo Web, un documento, un'immagine, etc. (opzionale); 4 Si veda 12
204 orario apertura (opzionale, solo per POI commerciali); tag. Le categorie definite in Bing sono: Arts & Entertainment Automotive & Vehicles Business to Business Computers & Technology Education Food & Dining Government & Community Health & Beauty Home & Family Legal & Finance Professionals & Services Real Estate & Construction Sports & Recreation Shopping Travel Ciascuna categoria è suddivisa rigidamente in sotto-categorie. Ad esempio le tipologie: Arts & Entertainment 1. Entertainment Agencies & Bureaus 2. Museums 3. Trade Shows, Expositions & Fairs 4. Adult Entertainment 5. Amusement 6. Art 7. Clubs 8. Costumes 9. Dance 10. Escort Services 11. Gambling 12. General Entertainers 13. Movies 14. Music 15. Party & Event Planning 16. Theater 17. Ticket Sales Food & Dining 13
205 1. Bakeries 2. Banquet Facilities 3. Beverages 4. Catering 5. Cooking & Barbecue 6. Grocery & Food Stores 7. Restaurants 8. Taverns, Bars & Cocktail Lounges Sports & Recreation 1. Hot Air Balloons 2. Skateboards & Equipment 3. Archery & Shooting 4. Bicycles 5. Bowling 6. Crafts & Hobbies 7. Equestrian 8. General Sports 9. Golf 10. Gymnastics 11. Horseshoes 12. Hunting & Fishing 13. Martial Arts & Self Defense 14. Outdoor Recreation 15. Paintball 16. Parachuting & Parasailing 17. Pool & Billiards 18. Racing 19. Recreation Centers 20. Skating 21. Snow Sports 22. Sporting Goods 23. Swimming & Watersports 24. Team Sports 25. Tennis & Racquet Sports 26. Country Clubs Bing gestisce, anche attraverso altri siti web quali Tripadvisor.it o 2spaghi.it, le recensioni su di un POI. La scelta di categorie e sotto-categorie utilizzata appare soddisfacente in quanto sicuramente semplice ed efficace. 14
206 Figura 3: Bing Google I POI di Google hanno caratteristiche assolutamente analoghe a quelli di Bing. Di seguito sono riportate le icone utilizzate da Google nella rappresentazione grafica delle categorie dei POI5: 5 Banca Negozio o campo da tennis Bar Sport invernali Concessionaria auto Cimitero Autonoleggio Vigili del fuoco Riparazione automobili Moschea Caffè o panetteria Sinagoga Si veda 15
207 Asilo nido o scuola materna Tempio o luogo di culto Ristorante Dentista Elettronica, computer ecc. Dottore Fast food Ospedale Area di servizio Farmacia Negozio di articoli da regalo Veterinario Cura dei capelli Parco divertimenti Internet Service Provider o imprese di noleggio Acquario Gioielleria Bowling Aspetti legali Casinò Alloggi Fitness Motociclette Cinema o noleggi Musica Auditorium o luoghi di eventi Attività legate agli animali Zoo Studio o attrezzatura fotografica Accademia o istituto di istruzione Shopping Aeroporto Alimentari Edificio pubblico Piscina Palazzo di giustizia Tè Ambasciata o sede amministrativa Telecomunicazioni Luogo storico Agenzia viaggi Industria Parcheggio Biblioteca Posteggio taxi Monumento Concessionaria camion o SUV Museo Baseball Polizia 16
208 Pesca Ufficio postale Campeggio Complesso residenziale Campo da golf Scuola Montagna Stadio Parco Destinazione turistica Area di sosta Università Complesso calcistico o sportivo Figura 4: Google 17
209 2.1.4.MapPoint MapPoint6 è un'applicazione per il mapping di oggetti e strutture che consente di gestire in maniera semplificata dati geospaziali per il Nord America e l Europa. MapPoint permette la costruzione e la visualizzazione di POI strutturati secondo il seguente modello: categoria; sotto-categoria; nome; coordinate geografiche; indirizzo; numero di telefono (opzionale); icona per la rappresentazione grafica. La gestione si limita alla sole categorie e sotto-categorie: Restaurants 1. Asian 2. BBQ 3. Chinese 4. Delis 5. French 6. Greek 7. Indian 8. Italian 9. Japanese 10. Mexican 11. Other 12. Pizza 13. Seafood 14. Steak 15. Thai Places 1. Airports Major 2. Airports Minor 3. Amusement parks 4. ATMs 5. Auto services 6. Banks 7. Bus stations 8. Campgrounds 6 Si veda 18
210 9. Casinos 10. Cinemas 11. City/town halls 12. Community centers 13. Convention centers 14. Ferry terminals 15. Galleries 16. Gas stations 17. Golf courses 18. Hospitals 19. Hotels and motels 20. Landmarks 21. Libraries 22. Marinas 23. Museums 24. National parks 25. Nightclubs and taverns 26. Park & Rides 27. Parking 28. Pharmacies 29. Police stations 30. Post offices 31. Rental car agencies 32. Rest areas 33. Schools 34. Ski resorts 35. Stadiums and arenas 36. Subway station 37. Theaters 38. Train stations 39. Wineries La scelta di categorie e sotto-categorie utilizzata appare limitata e non adatta alle esigenza del progetto World Map of UNESCO's Points of Interest (POI) World Map of UNESCO's Points of Interest 7 gestisce i POI di interesse per l UNESCO e le segnalazioni di eventi nel mondo di rilevanza per l infanzia. Si basa su OpenStreenMap a cui rimanda per una analisi delle sue caratteristiche Si veda Si vedano i paragrafi successivi 19
211 Figura 5: World Map of UNESCO's Points of Interest OpenPOIs OpenPOI9 è la banca dati dei POI del consorzio OGC, costituisce una della maggiori banche dati di POI in quanto contiene circa 9 milioni di POI distribuiti in tutto il mondo. La banca dati è stata costruita estraendo informazioni da diverse source: GeoNames (si veda oltre); China Historical GIS; Futouring. Questa banca dati contiene circa 2000 POI relativi alla regione Lazio; DBPedia. DBpedia è un progetto per l'estrazione di informazioni strutturate da Wikipedia e per il rilascio di queste informazioni sul Web. Il data set di DBPedia continue le coordinate geografiche di circa luoghi; OpenStreetMap (si veda oltre). I POI contenuti nella banca dati OpenPOIs possono essere scaricati liberamente attraverso API Custom oppure attraverso i servizi OGC Web Feature Service (WFS). Le query restituiscono i dati in formato XML o JSON secondo le specifiche indicate nel già citato Points of Interest Core W3C Working Draft. 9 Si veda 20
212 2.1.7.GEOsiti luoghi, itinerari, punti di interesse della Città di Napoli GEOsiti10 è il portale cartografico con luoghi, itinerari e punti di interesse della città di Napoli. I POI sono strutturati secondo il seguente modello: categoria; nome; coordinate geografiche; indirizzo; galleria. Contiene foto digitali; storia. Contiene una descrizione della storia del POI; Informazioni (opzionale). Contiene ulteriori informazioni non-strutturate. Le categorie definite in GEOsiti sono: Biblioteche Castelli Catacombe e Cripte Chiese Chiostri Fontane Musei Metrò dell'arte Palazzi Piazze e porticati Porte/arco Scavi archeologici Siti di Interesse Teatri Vie/largo Le categorie utilizzate appaiono limitate e la stessa modellazione dei POI insufficiente. 10 Si veda 21
213 Figura 6: GEOsiti luoghi, itinerari, punti di interesse della Città di Napoli Cagliari Turismo, portale turistico della Città di Cagliari Cagliari Turismo11 è il sito ufficiale di informazione e promozione turistica del Comune di Cagliari, curato dalla redazione interna all'ufficio del Turismo. Il portale offre ai turisti, ai cittadini e agli operatori economici un servizio di informazione sull'offerta turistica cittadina, i luoghi e gli appuntamenti in città assicurando costante aggiornamento, qualità e affidabilità delle notizie pubblicate. I POI sono strutturati secondo il seguente modello: gruppo; categoria; nome; coordinate geografiche; indirizzo; descrizione; orario apertura (opzionale, solo per POI commerciali); URL ad una scheda di approfondimento. L organizzazione, in Cagliari Turismo, di gruppi e categorie è gerarchica: Eventi e segnalazioni varie 1. Biblioteche e Centri d'arte 11 Trasporti 1. Aeroporto Si veda 22
214 2. Cinema e Teatro 3. Conferenze e riunioni 4. Divieto Transito Sosta 5. Eventi e Manifestazioni 6. Infopoint 7. Lavori stradali 8. Musei e monumenti 9. Musica e Concerti 10. Parcheggi e aree di sosta Commercio 1. Enogastronomia tradizionale 2. Enoteche 3. Laboratori artigiani 4. Librerie 5. Mercati 6. Mercatini all'aperto 7. Negozi di artigianato sardo e souvenirs Ricettività 1. Affittacamere 2. Alberghi 3. Bed and Breakfast 4. Boat & Breakfast 5. Case e appartamenti per vacanze 6. Ostelli 7. Residence alberghi Ristorazione 1. Bar 2. Fast foods 3. Gelaterie 4. Pizzerie 5. Ristoranti 6. Ristoranti etnici 7. Ristoranti per celiaci 8. Ristoranti vegetariani e vegani 9. Slow foods Servizi 1. Ascensori 2. Bagni pubblici 3. Biblioteche 4. CAMPAGNE DI SENSIBILIZZAZIONE 5. Cassette postali 6. Consolati 7. Emeroteche 8. Farmacie 9. Fototessere 10. Infopoint 11. Internet points 12. Mediateche 13. Noleggio bici 14. Noleggio imbarcazioni 15. Ospedali 16. Telefoni pubblici 2. Amico bus 3. ARST 4. Autonoleggi e noleggio con conducente 5. Bus navetta aeroporto 6. Consegne e spedizioni 7. Ctm 8. MetroCagliari 9. Parcheggi auto 10. Parcheggi gratuiti 11. Parcheggi moto 12. Porto 13. Porto canale 14. Stazione autobus 15. Stazione treni 16. Taxi e postazioni taxi 17. Trasporto pubblico 18. Ztl Turismo 1. Affitto case vacanze 2. Agenzie di viaggi 3. Associazioni guide turistiche 4. Bus turistici 5. Deposito bagagli 6. Escursioni in barca 7. Porti turistici 8. Tour e Visite guidate Luoghi 1. Fiera Internazionale della Sardegna 2. Porti 3. Punti di informazione 4. Punti panoramici 5. Spiagge 6. Archivi 7. Centri culturali 8. Chiese sconsacrate 9. Collezioni e mostre permanenti 10. Gallerie d'arte 11. Meeting, Incentive, Congress & Event 12. Musei 13. Teatri 14. Università degli Studi di Cagliari 15. Chiese 16. Conventi e monasteri 17. Cripte 18. Cimiteri monumentali 19. Monumenti commemorativi 20. Presidi difensivi storici 21. Rifugi sotterranei 22. Aree di interesse naturalistico 23. Aree verdi 24. Colli 25. Parchi 26. Zone umide e stagni 23
215 17. Uffici postali 18. Zone WiFi Tempo libero 1. Aree ciclabili 2. Aree pedonali 3. Associazioni moto d'epoca 4. Caffè letterari 5. Centri benessere 6. Cinema 7. Diving Center 8. Impianti sportivi 9. Maneggi 10. Palestre 11. Pubs 12. Spazi espositivi 13. Sport estremi 14. Trekking Bastioni Cavità sotterranee e grotte Fari Monumenti Palazzi storici Pozzi e cisterne Quartieri Siti archeologici Torri Osserviamo che un POI può appartenere a più categorie. Ad esempio la Basilica di San Saturnino appartiene alle categorie Chiese e Monumenti. Le categorie utilizzate appaiono di interesse considerato che sono strettamente legate all ambito turistico. Figura 7: Cagliari Turismo, portale turistico della Città di Cagliari 24
216 2.1.9.Punti di Interesse Turistico della Regione Marche La Regione Marche elenca i punti di interesse Turistico 12 nel proprio portale consentendone lo scarico sul proprio PC. I POI sono strutturati secondo il seguente modello: identificativo POI; tipologia; denominazione; codice ISTAT Comune; comune; indirizzo; telefono; ; sito Web; coordinate; orario apertura (opzionale, solo per POI commerciali). Le tipologie definite in Regione Marche Punti di Interesse Turistico sono: Chiese Monasteri e conventi IAT - Uffici Informazioni Spiagge Parchi Eccellenze Personaggi e la loro terra Opere d'arte (eccellenze) Archeologia (eccellenze) Luoghi di arte (eccellenze) Sport (parziale) Architettura e paesaggio (eccellenze) Storie e leggende Locali storici Ristoranti Operatori turistici Cataloghi Parchi divertimento Tradizioni Le tipologie utilizzate appaiono di interesse considerato che sono strettamente legate all ambito turistico. 12 Si veda 25
217 Punti di Interesse della Città di Berna La città di Berna13 riporta i propri punti di interesse suddivisi in: Luoghi d'interesse: Hotels; Vita notturna; Shopping; Gastronomie. I POI appaiono correlati ad una scheda senza nessuna modellizzazione ed organizzazione. Figura 8: Punti di Interesse della Città di Berna 13 Si veda 26
218 Punti d'interesse Parco Etna I punti di interesse del Parco Etna 14 sono riportati come mero elenco senza nessuna modellizzazione ed organizzazione Punti di Interesse della Città di Brescia La città di Brescia riporta i punti di interesse Turistico 15 come mero elenco senza nessuna modellizzazione ed organizzazione Portale del Territorio Immagine decorativa Comunità Valsugana e Tesino Il Portale del Territorio Comunità Valsugana e Tesino riporta i punti di interesse Turistico 16 nel proprio portale consentendone lo scarico sul proprio PC. I POI sono strutturati secondo il seguente modello: tipologia; denominazione; descrizione; icona; coordinate. Le tipologie definite nel Portale del Territorio Comunità Valsugana e Tesino sono: Località turistica Trekking Noleggio attrezzature sportive Museo Biblioteca Castello Mountain Bike Ecomuseo Percorso naturalistico Sci alpinismo / Sci Escursionismo Luogo incantevole Piscina Golf Biotopo Le tipologie utilizzate appaiono generiche e di scarso interesse per i temi della ricerca. Si veda Si veda 16 Si veda
219 Figura 9: Portale del Territorio Immagine decorativa Comunità Valsugana e Tesino Punti di Interesse della Riviera Romagnola Il sito Speciale Hotel17 riporta i POI della Riviera Romagnola. I POI sono riportati sia su mappa sia come mero elenco senza nessuna modellizzazione ed organizzazione Punti di Interesse di Palau Il Portale di promozione e informazione turistica del centro commerciale naturale ORSUS di Palau 18, riporta i POI del territorio di Palau. I POI sono strutturati secondo il seguente modello: tipologia; nome; indirizzo; Si veda Si veda 28
220 telefono (opzionale); (opzionale); descrizione (opzionale); sito web (opzionale); coordinate geografiche. Le tipologie utilizzate sono: Abbigliamento Accessori Agenzie di servizi Agenzie di viaggio Agenzie funebri Agenzie immobiliari Agriturismi Alberghi Alimentari Amministrazione condomini Arredamento Artigianato Assistenza tecnica Autofficine meccaniche Baby Sitter e Parking Bar Bed & Breakfast Campeggi Cantieri nautici Carrozzerie Case vacanza Centri estetici e di benessere Centri servizi Consulenti del lavoro Distributori carburante Diving centers Escursioni in barca Escursioni via terra Falegnami Farmacie / Parafarmacie Ferramenta Fotografi Frutta e verdura Giardinaggio Gioiellerie Gommisti Idraulici Imprese agricole Imprese edili Itinerari archeologici Lavanderie Macchine e attrezzature per il commercio Macellerie Mercatino Negozi di idraulica Negozi di nautica Negozi di ottica Noleggio auto Noleggio bus e minibus Noleggio imbarcazioni Panifici Parcheggi custoditi Parrucchieri Pasta fresca Pasticcerie Pescherie Pizzerie Posti barca Profumerie Punti di interesse Residence Ristoranti Rosticcerie e Gastronomie Scuole di kitesurf Scuole di vela Scuole di windsurf Servizio taxi Studi di progettazione Studi grafici Studi legali Traghetti per La Maddalena Vele e tendoni Le tipologie utilizzate appaiono troppo specifiche e di scarso interesse per i temi della ricerca Aree Protette del Po e della Collina Torinese Il Portale delle Aree Protette del Po e della Collina Torinese 19 riporta i punti di interesse come mero elenco senza nessuna modellizzazione ed organizzazione Categorie POI per navigatori satellitari Si riportano di seguito due esempi delle categorie e tipologie utilizzate nell organizzazione dei POI nei navigatori satellitari. 1. Jensen NAV100 GPS Navigation System Automotive 19 Others Si veda 29
221 o Automobile club o Parking o Car parts o Car rental o Repair service o Car dealership/repair o Car wash o Gas station Business o Bank o Service business o ATM o Convention/Exhibition center o Currency exchange o Manufacturing business Civic Center Education o University/College o School o Nursery/Pre-school o Elementary school o Middle school o High school Emergency o Pharmacy o General practitioner o Specialist o Dental surgeon/dentist o Veterinarian o EMS o Fire station o Hospital o Police station Entertainment o Art gallery o Arcade o Casino o Cinema o Museum o Night life/disco o Stage o Winery Food & Drink o Fast food o Bar o Ice cream o Pizzeria o Restaurant Government o Court house o Embassy o Government office Prisons Lodging o Travel agency o Cemetery o Others Recreation o Amusement park o Beach o Fairground o National park o National forest o State park o Park o Zoo/Aquarium o Stadium/Arena o Outdoor sport o Bowling alley o Golf course o Ice rink o Sports center o Swimming pool o Tennis court o Marina o Squash court o Pool hall o Others o Hiking ground o Ski resort o Fitness club Public Services o Library o Post office o Tourist information Service Shops o Shopping center o Service shop o Specialty store o Grocery Tourist Attraction o Building o Monument o Mountain o Other tourist attractions o Church Traffic Related o Border post/frontier crossing o Mountain pass o Rest area Travel o Airline access o Airport o Ferry terminal o Railway station 30
222 o o o o o Camping Guest house Hotel Recreational camp Youth hostel 2. TomTom Amusement Park ATM Bank Machine Beach Beauty Beauty Salon Border Crossing Bus Station Campground Camping Ground Car dealership Car rental facility Car repair Car Repair Service Car Wash Cash Machine Casino Church Clinic College Company Concert hall Convention Center Cultural Center Dentist Doctor Embassy Exhibition Center Ferry Terminal Fire Station Garage Gas Station Golf Course Government office Hospital Hotel Ice skating rink Law courts Legal Legal Office Legal Solicitors Leisure center Library Marina Motel Mountain Pass Mountain Peak Movie Theater Museum Nightlife Open parking Opera Panoramic View Park and Recreation Area Parking Parking Facility Parking Garage Parking Lot Pharmacy Place of worship Playing Field Police Station Post Office Railway Station Rental car parking Rest Area Restaurant Scenic View School Shop Shopping Center Shopping Mall Solicitors Sports Center Stadium Swimming Pool Tennis Court Theater Tourist attraction Tourist Information Office Truck stop and Service University Veterinarian Water sports Winery Yacht Club Zoo 31
223 GeoNames Geonames20 è un data base geografico (utilizza come sistema di riferimento WGS84) che può essere acceduto liberamente alle condizioni previste dalla creative commons license. La banca dati GeoNames contiene oltre 10 milioni di nomi geografici ai quali sono associate features raggruppate in 9 classi suddivise in 668 sotto-categorie. La descrizione completa della classi è riportata in: Di seguito si riporta, come esempio, la classe S spot, building, farm: administrative facility agricultural facility airbase airfield heliport airport a government building a building and/or tract of land used for improving agriculture an area used to store supplies, provide barracks for air force personnel, hangars and runways for aircraft, and from which operations are initiated a place on land where aircraft land and take off; no facilities provided for the commercial handling of passengers and cargo a place where helicopters land and take off a place where aircraft regularly land and take off, with runways, navigational aids, and major facilities for the commercial handling of passengers and cargo abandoned airfield amphitheater ancient site aquaculture facility arch astronomical station asylum athletic field automatic teller machine bank beacon bridge ruined bridge building(s) office building boundary marker barracks breakwater baling station boatyard burial cave(s) 20 an oval or circular structure with rising tiers of seats about a stage or open space a place where archeological remains, old structures, or cultural artifacts are located facility or area for the cultivation of aquatic animals and plants, especially fish, shellfish, and seaweed, in natural or controlled marine or freshwater environments; underwater agriculture a natural or man-made structure in the form of an arch a point on the earth whose position has been determined by observations of celestial bodies a facility where the insane are cared for and protected a tract of land used for playing team sports, and athletic track and field events An unattended electronic machine in a public place, connected to a data system and related equipment and activated by a bank customer to obtain cash withdrawals and other banking services. A business establishment in which money is kept for saving or commercial purposes or is invested, supplied for loans, or exchanged. a fixed artificial navigation mark a structure erected across an obstacle such as a stream, road, etc., in order to carry roads, railroads, and pedestrians across a destroyed or decayed bridge which is no longer functional a structure built for permanent use, as a house, factory, etc. commercial building where business and/or services are conducted a fixture marking a point along a boundary a building for lodging military personnel a structure erected to break the force of waves at the entrance to a harbor or port a facility for baling agricultural products a waterside facility for servicing, repairing, and building small vessels a cave used for human burials Si veda 32
224 bus station bus stop cairn cave(s) church camp(s) logging camp labor camp mining camp oil camp abandoned camp refugee camp cemetery communication center corral(s) casino castle customs house courthouse atomic center community center facility center medical center religious center space center convent dam ruined dam sub-surface dam dairy dry dock dockyard dike diplomatic facility fuel depot estate(s) oil palm plantation rubber plantation sugar plantation tea plantation a facility comprising ticket office, platforms, etc. for loading and unloading passengers a place lacking station facilities a heap of stones erected as a landmark or for other purposes an underground passageway or chamber, or cavity on the side of a cliff a building for public Christian worship a site occupied by tents, huts, or other shelters for temporary use a camp used by loggers a camp used by migrant or temporary laborers a camp used by miners a camp used by oilfield workers a camp used by refugees a burial place or ground a facility, including buildings, antennae, towers and electronic equipment for receiving and transmitting information a pen or enclosure for confining or capturing animals a building used for entertainment, especially gambling a large fortified building or set of buildings a building in a port where customs and duties are paid, and where vessels are entered and cleared a building in which courts of law are held a facility where atomic research is carried out a facility for community recreation and other activities a place where more than one facility is situated a complex of health care buildings including two or more of the following: hospital, medical school, clinic, pharmacy, doctor's offices, etc. a facility where more than one religious activity is carried out, e.g., retreat, school, monastery, worship a facility for launching, tracking, or controlling satellites and space vehicles a building where a community of nuns lives in seclusion a barrier constructed across a stream to impound water a destroyed or decayed dam which is no longer functional a dam put down to bedrock in a sand river a facility for the processing, sale and distribution of milk or milk products a dock providing support for a vessel, and means for removing the water so that the bottom of the vessel can be exposed a facility for servicing, building, or repairing ships an earth or stone embankment usually constructed for flood or stream control office, residence, or facility of a foreign government, which may include an embassy, consulate, chancery, office of charge d'affaires, or other diplomatic, economic, military, or cultural mission an area where fuel is stored a large commercialized agricultural landholding with associated buildings and other facilities an estate specializing in the cultivation of oil palm trees an estate which specializes in growing and tapping rubber trees an estate that specializes in growing sugar cane an estate which specializes in growing tea bushes 33
225 section of estate facility foundry farm abandoned farm farms farmstead fort ferry gate garden(s) ghat guest house gas-oil separator plant local government office grave hermitage halting place homestead house(s) country house hospital clinic dispensary leprosarium historical site hotel hut huts military installation research institute jetty landing leper colony library landfill lock(s) lighthouse mall marina a building or buildings housing a center, institute, foundation, hospital, prison, mission, courthouse, etc. a building or works where metal casting is carried out a tract of land with associated buildings devoted to agriculture tracts of land with associated buildings devoted to agriculture the buildings and adjacent service areas of a farm a defensive structure or earthworks a boat or other floating conveyance and terminal facilities regularly used to transport people and vehicles across a waterbody a controlled access entrance or exit an enclosure for displaying selected plant or animal life a set of steps leading to a river, which are of religious significance, and at their base is usually a platform for bathing a house used to provide lodging for paying guests a facility for separating gas from oil a facility housing local governmental offices, usually a city, town, or village hall a burial site a secluded residence, usually for religious sects a place where caravans stop for rest a residence, owner's or manager's, on a sheep or cattle station, woolshed, outcamp, or Aboriginal outstation, specific to Australia and New Zealand a building used as a human habitation a large house, mansion, or chateau, on a large estate a building in which sick or injured, especially those confined to bed, are medically treated a medical facility associated with a hospital for outpatients a building where medical or dental aid is dispensed an asylum or hospital for lepers a place of historical importance a building providing lodging and/or meals for the public a small primitive house small primitive houses a facility for use of and control by armed forces a facility where research is carried out a structure built out into the water at a river mouth or harbor entrance to regulate currents and silting a place where boats receive or discharge passengers and freight, but lacking most port facilities a settled area inhabited by lepers in relative isolation A place in which information resources such as books are kept for reading, reference, or lending. a place for trash and garbage disposal in which the waste is buried between layers of earth to build up low-lying land a basin in a waterway with gates at each end by means of which vessels are passed from one water level to another a distinctive structure exhibiting a major navigation light A large, often enclosed shopping complex containing various stores, businesses, and restaurants usually accessible by common passageways. a harbor facility for small boats, yachts, etc. 34
226 factory brewery cannery copper works limekiln munitions plant phosphate works abandoned factory sugar refinery market mill(s) ore treatment plant olive oil mill sugar mill former sugar mill sawmill windmill water mill mine(s) gold mine(s) coal mine(s) chrome mine(s) copper mine(s) iron mine(s) monument salt mine(s) abandoned mine quarry(-ies) mole mosque mission abandoned mission monastery metro station museum novitiate nursery(-ies) observation point observatory radio observatory oil pipeline junction abandoned oil well oil refinery tank farm one or more buildings where goods are manufactured, processed or fabricated one or more buildings where beer is brewed a building where food items are canned a facility for processing copper ore a furnace in which limestone is reduced to lime a factory where ammunition is made a facility for producing fertilizer a facility for converting raw sugar into refined sugar a place where goods are bought and sold at regular intervals a building housing machines for transforming, shaping, finishing, grinding, or extracting products a facility for improving the metal content of ore by concentration a mill where oil is extracted from olives a facility where sugar cane is processed into raw sugar a sugar mill no longer used as a sugar mill a mill where logs or lumber are sawn to specified shapes and sizes a mill or water pump powered by wind a mill powered by running water a site where mineral ores are extracted from the ground by excavating surface pits and subterranean passages a mine where gold ore, or alluvial gold is extracted a mine where coal is extracted a mine where chrome ore is extracted a mine where copper ore is extracted a mine where iron ore is extracted a commemorative structure or statue a mine from which salt is extracted a surface mine where building stone or gravel and sand, etc. are extracted a massive structure of masonry or large stones serving as a pier or breakwater a building for public Islamic worship a place characterized by dwellings, school, church, hospital and other facilities operated by a religious group for the purpose of providing charitable services and to propagate religion a building and grounds where a community of monks lives in seclusion metro station (Underground, Tube, or Metro) a building where objects of permanent interest in one or more of the arts and sciences are preserved and exhibited a religious house or school where novices are trained a place where plants are propagated for transplanting or grafting a wildlife or scenic observation point a facility equipped for observation of atmospheric or space phenomena a facility equipped with an array of antennae for receiving radio waves from space a section of an oil pipeline where two or more pipes join together a facility for converting crude oil into refined petroleum products a tract of land occupied by large, cylindrical, metal tanks in which oil or 35
227 oil well opera house palace pagoda pier parking lot oil pumping station water pumping station post office police post abandoned police post park gate park headquarters prison reformatory abandoned prison power station hydroelectric power station border post customs post patrol post pyramid pyramids quay traffic circle golf course racetrack restaurant store resthouse rookery religious site retreat ranch(es) railroad siding railroad signal resort railroad station liquid petrochemicals are stored a well from which oil may be pumped A theater designed chiefly for the performance of operas. a large stately house, often a royal or presidential residence a tower-like storied structure, usually a Buddhist shrine a structure built out into navigable water on piles providing berthing for ships and recreation an area used for parking vehicles a facility for pumping oil through a pipeline a facility for pumping water from a major well or through a pipeline a public building in which mail is received, sorted and distributed a building in which police are stationed a controlled access to a park a park administrative facility a facility for confining prisoners a facility for confining, training, and reforming young law offenders a facility for generating electric power a building where electricity is generated from water power a post or station at an international boundary for the regulation of movement of people and goods a building at an international boundary where customs and duties are paid on goods a post from which patrols are sent out an ancient massive structure of square ground plan with four triangular faces meeting at a point and used for enclosing tombs ancient massive structures of square ground plan with four triangular faces meeting at a point and used for enclosing tombs a structure of solid construction along a shore or bank which provides berthing for ships and which generally provides cargo handling facilities a road junction formed around a central circle about which traffic moves in one direction only a recreation field where golf is played a track where races are held A place where meals are served to the public a building where goods and/or services are offered for sale a structure maintained for the rest and shelter of travelers a breeding place of a colony of birds or seals an ancient site of significant religious importance a place of temporary seclusion, especially for religious groups a large farm specializing in extensive grazing of livestock a short track parallel to and joining the main track a signal at the entrance of a particular section of track governing the movement of trains a specialized facility for vacation, health, or participation sports activities a facility comprising ticket office, platforms, etc. for loading and unloading train passengers and freight abandoned railroad station railroad stop a place lacking station facilities where trains stop to pick up and unload passengers and freight 36
228 abandoned railroad stop ruin(s) school agricultural school college language school military school maritime school technical school State Exam Prep Centre sheepfold shrine storehouse sluice sanatorium spa spillway square stable stadium scientific research base coast guard station experiment station forest station inspection station meteorological station radio station satellite station whaling station steps sewage treatment plant theater tomb(s) temple(s) cattle dipping tank tower transit terminal triangulation station oil pipeline terminal temp work office university prep school a destroyed or decayed structure which is no longer functional building(s) where instruction in one or more branches of knowledge takes place a school with a curriculum focused on agriculture the grounds and buildings of an institution of higher learning Language Schools & Institutions a school at which military science forms the core of the curriculum a school at which maritime sciences form the core of the curriculum post-secondary school with a specifically technical or vocational curriculum state exam preparation centres a fence or wall enclosure for sheep and other small herd animals a structure or place memorializing a person or religious concept a building for storing goods, especially provisions a conduit or passage for carrying off surplus water from a waterbody, usually regulated by means of a sluice gate a facility where victims of physical or mental disorders are treated a resort area usually developed around a medicinal spring a passage or outlet through which surplus water flows over, around or through a dam a broad, open, public area near the center of a town or city a building for the shelter and feeding of farm animals, especially horses a structure with an enclosure for athletic games with tiers of seats for spectators a scientific facility used as a base from which research is carried out or monitored a facility from which the coast is guarded by armed vessels a facility for carrying out experiments a collection of buildings and facilities for carrying out forest management a station at which vehicles, goods, and people are inspected a station at which weather elements are recorded a facility for producing and transmitting information by radio waves a facility for tracking and communicating with orbiting satellites a facility for butchering whales and processing train oil stones or slabs placed for ease in ascending or descending a steep slope facility for the processing of sewage and/or wastewater A building, room, or outdoor structure for the presentation of plays, films, or other dramatic performances a structure for interring bodies an edifice dedicated to religious worship a small artificial pond used for immersing cattle in chemically treated water for disease control a high conspicuous structure, typically much higher than its diameter facilities for the handling of vehicular freight and passengers a point on the earth whose position has been determined by triangulation a tank farm or loading facility at the end of an oil pipeline Temporary Work Offices University Preparation Schools & Institutions 37
229 university united states government establishment veterinary facility wall ancient wall weir(s) wharf(-ves) wreck waterworks free trade zone zoo An institution for higher learning with teaching and research facilities constituting a graduate school and professional schools that award master's degrees and doctorates and an undergraduate division that awards bachelor's degrees. a facility operated by the United States Government in Panama a building or camp at which veterinary services are available a thick masonry structure, usually enclosing a field or building, or forming the side of a structure the remains of a linear defensive stone structure a small dam in a stream, designed to raise the water level or to divert stream flow through a desired channel a structure of open rather than solid construction along a shore or a bank which provides berthing for ships and cargo-handling facilities the site of the remains of a wrecked vessel a facility for supplying potable water through a water source and a system of pumps and filtration beds an area, usually a section of a port, where goods may be received and shipped free of customs duty and of most customs regulations a zoological garden or park where wild animals are kept for exhibition La suddivisione per nazione dei nomi geografici censiti è riportata in per l Italia sono circa L accesso alla banca dati può essere eseguito attraverso il download del dump21 in formato text file (aggiornato giornalmente), oppure attraverso specifici web service OpenStreetMap OpenStreetMap (OSM) è un progetto nato nel 2004 che ha come obiettivo creare e rendere disponibili dati cartografici, liberi e gratuiti, a chiunque voglia utilizzarli. La comunità di OSM raccoglie, a livello globale, dati di strade, ferrovie, fiumi, foreste, edifici e tutto ciò che normalmente è visualizzato sulle mappe geografiche. Poiché i dati sono rilevati dai membri della comunità e non sono copiati o derivati da mappe esistenti, chiunque può utilizzarli a qualsiasi scopo e senza costi di licenza. OSM offre l insieme dei dati sia in forma grezza o in forma di mappa pre-elaborata: le forma pre-elaborata rappresenta la forma più veloce per visualizzarli o inserirli all interno di una propria pagina web. i dati grezzi si prestano ad elaborazioni per creare mappe specifiche. I dati possono essere scaricati in diversi formati oppure è possibile utilizzare API in stile Google Maps per mostrare i dati di OSM sul proprio sito web23. OSM usa una struttura dati topologica. Le mappe di OSM sono composte solo da pochi semplici elementi, chiamati nodi, percorsi e relazioni. Ogni elemento può avere un certo numero di proprietà (dette etichette, in inglese tags) che sono associate ad un valore (esempio: highway=primary). Tutte le interfacce di gestione usano questi elementi e permettono di inserire le etichette. Si veda Si veda 23 Si veda
230 1. Nodo (node). Un nodo è l'elemento base dello schema di dati OSM. I nodi consistono di una latitudine e di una longitudine (un singolo punto geografico) I nodi sono necessari per definire un percorso (vedi sotto), però possono anche essere dei punti non connessi, indipendenti, quando si vuole rappresentare ad esempio quale una cabina telefonica, un pub, una denominazione di luogo, o tutti gli altri punti di interesse. I nodi indipendenti devono possedere almeno una etichetta, come ad esempio amenity=telephone. I nodi che fanno parte di un percorso spesso non possiedono delle proprie etichette (essi solamente esistono per descrivere il percorso), ma questa non è una regola ferrea. Per esempio un nodo può essere etichettato come railway=station ed anche essere incluso in un percorso etichettato come railway=rail. 2. Percorso (way). Un percorso è una interconnessione ordinata di almeno 2 nodi che descrive una caratteristica lineare come una strada, o qualcosa di simile. Un nodo può appartenere a più percorsi. 3. Relazione (relation). Una relazione può raggruppare assieme altri elementi, nodi, percorsi, ed all'occorrenza anche altre relazioni. I singoli elementi sono i 'membri' della relazione, ed ognuno di essi assume un 'ruolo'. Come per gli altri tipi di elementi, una relazione può possedere un numero arbitrario di etichette. All'interno di una stessa relazione si possono avere nodi, percorsi o relazioni duplicati. 4. Etichetta (tag). Una etichetta non è un elemento, bensì una proprietà applicata ad un nodo, percorso o relazione. Queste proprietà sono contraddistinte da coppie Chiave-Valore che descrivono l'elemento. Le Chiavi ed i Valori possono essere delle stringhe Unicode lunghe al massimo 255 caratteri. Per essere sicuri che le applicazioni e gli altri utilizzatori dei dati OpenStreetMap possano interpretare le etichette in modo significativo, è consigliato (non obbligatorio) seguire un certo standard di etichettatura, documentato nella documentazione sulle Map Features. Non c'è limite al numero di etichette che possono essere collegate ad un singolo elemento e OSM non pone alcun genere di restrizione sulle chiavi (Keys) e sui valori (Values) che possono essere definiti. La Comunità si trova in genere d'accordo su determinate combinazioni chiave-valore per i tag più utilizzati, che fungono da standard informale. Tuttavia, gli utenti possono creare nuovi tag per migliorare lo stile della mappa o per supportare le analisi che si basano su attributi delle caratteristiche non mappati in precedenza. Come detto in precedenza, i POI, in OSM, sono rappresentati da nodi semplici ai quali sono associate almeno una delle seguenti chiavi: 1. aeroway (aeroporto). Aeroporti, campi volo altre e strutture affini di supporto all'utilizzo di aerei ed elicotteri. Si veda wiki.openstreetmap.org/wiki/it:map_features#aeroway_.28aeroporto.29 per una descrizione dei possibili valori della chiave, della spiegazione di ciascun valore, per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 2. craft (artigiani). Un posto dove si realizzano produzioni o lavorazioni su commissione. Si veda wiki.openstreetmap.org/wiki/it:map_features#craft_.28artigiani.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 39
231 3. emergency (emergenze). Servizi per una emergenza o oggetti usati durante una emergenza. Si veda wiki.openstreetmap.org/wiki/it:map_features#emergency_.28emergenze.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 4. places (luoghi). Usato per insediamenti e territori. Si veda wiki.openstreetmap.org/wiki/it:map_features#places_.28luoghi.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 5. shop (negozi). Un negozio è un posto dove sono vendute merci. Sono concettualmente suddivisi in Cibo e bevande Grandi magazzini, supermercati e centri commerciali Abbigliamento e accessori, scarpe Occasioni, beneficienza Salute e bellezza Fai da te, casalinghi, edilizia, giardinaggio Mobilio ed arredamento Elettronica Outdoor e sport, veicoli Arte, musica, hobby Cancelleria, articoli da regalo, libri, giornali e riviste Altro Si veda wiki.openstreetmap.org/wiki/it:map_features#shop_.28negozi.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 6. historic (storiche). Usato per descrivere vari siti archeologici, rovine, relitti, castelli, edifici antichi. Si veda wiki.openstreetmap.org/wiki/it:map_features#historic_.28storiche.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 7. amenity (strutture di servizio). Sono concettualmente suddivise in: Mangiare e bere Istruzione Mezzi di trasporto Denaro Assistenza sanitaria 40
232 Intrattenimento, cultura, belle arti Altro Si veda wiki.openstreetmap.org/wiki/it:map_features#amenity_.28strutture_di_servizio.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 8. leisure (tempo libero). Si veda wiki.openstreetmap.org/wiki/it:map_features#leisure_.28tempo_libero.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 9. tourism (turismo). Usato per indicare località o cose di specifico interesse turistico. Si veda wiki.openstreetmap.org/wiki/it:map_features#tourism_.28turismo.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI; 10. office (uffici). Un ufficio è un posto dove vengono offerti servizi al pubblico. Si veda wiki.openstreetmap.org/wiki/it:map_features#office_.28uffici.29 per l elenco dei possibili valori della chiave, della descrizione di ciascun valore, dell icona utilizzata per la rappresentazione del POI. Figura 10: OpenStreetMap La struttura utilizzata OSM è sicuramente completa, ma appare anche complessa e di non facile gestione. 41
233 Pagine Gialle Il Portale Pagine Gialle24 è stato esaminato in quanto si è ritenuto utile analizzare la metodologia con cui le sue informazioni sono modelizzate ed organizzate. Il Portale consente di ricercare un attività, un impresa, un operatore per categoria e comune. Le informazioni sono strutturate secondo il seguente modello: categoria; nome; descrizione; indirizzo; numero di telefono; sito web (opzionale); (opzionale); recensioni (opzionale); Uniform Resource Identifier (URI) di una risorsa generica che può essere un indirizzo Web, un documento, un'immagine, ecc (opzionale); tag (opzionale); marchio grafico (opzionale). Le categorie presenti sono circa I tag sono parole chiave che possono essere associate alle categorie. 24 Si veda 42
234 Figura 11: Pagine Gialle 43
235 3 Modello di POI Di seguito è riportata la descrizione delle entità che, in base all analisi effettuata, definiscono il nostro modello di POI: 1. ID 2. Lingua 3. Descrizione 4. Sistema di riferimento 5. Geometria 6. Posizione baricentro 7. Categoria 8. Contatti 9. Web 10. URI 11. Tag 12. Data aggiornamento 13. Autore 3.1. ID E l identificativo univoco del POI Lingua Specifica la lingua nella quale sono riportate le informazioni sul POI esposte in linguaggio naturale. Un POI può essere descritto in più lingue. E utilizzato lo standard ISO Descrizione L entità descrizione racchiude le informazioni contenute nel POI. E descritta dagli attributi: nome. Specifica il nome del POI nel linguaggio naturale. Esempio Chiesa di San Mariano o Ristorante Alba ; descrizione. Specifica informazioni addizionali sul POI in linguaggio naturale. 25 Si veda ISO 639-1:2002, Codes for the representation of names of languages, (2002) 44
236 3.4. Sistema di riferimento Specifica il sistema di riferimento geografico. E utilizzata la codifica EPSG 26. Un POI può essere descritto in più sistemi di riferimento Geometria Specifica la geometria del POI (punto, linea, poligono, multi-punto, etc.) e fornisce le coordinate, nel sistema di riferimento definito,per la sua rappresentazione Posizione baricentro L entità posizione baricentro contiene le informazioni sulla posizione del baricentro del POI, definito come singolo punto che rappresenta la posizione geografica del POI. E descritta dalle entità: posizione geografica. Questa entità indica la posizione sulla superficie terreste del POI in coordinate geografiche. E descritta dagli attributi: coordinate. Specifica le coordinate geografiche nel sistema di riferimento definito; altitudine. Specifica l altitudine rispetto al geoide di riferimento. indirizzo. Questa entità indica la posizione del POI su un grafo stradale o in una località. E descritta dagli attributi: specifica indirizzo. Indica la DUG (Denominazione Urbanistica Generalizzata): Piazza, Via, Vicolo, Località, etc. intermezzo. Specifica l eventuale intermezzo dell indirizzo (di, degli, dei, etc.); nome. Nome vero e proprio normalizzato ovvero toponimo; numero civico; CAP; Comune; Provincia. L indirizzo non contiene, in quanto non fondamentali, informazioni su scala, piano, interno, etc Categoria Specifica la classificazione del POI. Un POI può appartenere a più categorie. Le categorie appartengono ad un dizionario chiuso. Le categorie sono suddivise in classi allo solo scopo di facilitarne la gestione (vedi il capitolo successivo). 26 Si veda 45
237 3.8. Contatti L entità contatti racchiude eventuali informazioni su come contattare personale correlato al POI. E descritta dagli attributi: telefono; Web L entità web specifica il sito web principale del POI. E rappresentata da un URL URI L entità URI specifica una o più Uniform Resource Identifier Reference che contengono ulteriori informazioni sui POI Tag L entità tag descrive una proprietà applicata al POI (metadati POI). Le proprietà sono contraddistinte da coppie chiave-valore che descrivono l'elemento. Le chiavi appartengono ad un dizionario chiuso, mentre, a seconda della chiave, i valori possono appartenere o meno ad un dizionario chiuso e possono essere descritti secondo uno specifico formalismo. Non c'è limite al numero di coppie chiave-valore che possono essere collegati ad un singolo POI Data aggiornamento L entità data aggiornamento racchiude le informazioni temporali sulle variazioni di stato del POI nel sistema. E descritta dagli attributi: Data inserimento; Data modifica; Data cancellazione Autore Specifica l autore della creazione o aggiornamento del POI. E caratterizzato dai seguenti attributi: nome autore. Specifica il nome della persona fisica che ha creato o aggiornato il POI; Note Specifica note associate al POI. E un campo non strutturato che può contenere informazioni varie quali la genealogia del POI, etc. 46
238 4 Classificazione dei POI In questo capitolo sono descritte: 1. categorie POI; 2. tag POI. Ove necessario, al fine di evitare ambiguità, viene riportata una definizione del termine usato o la URL dove la definizione può essere reperita Categorie POI Le categorie POI sono espresse in linguaggio naturale e dunque dipendono dalla lingua scelta. Nel caso dell italiano sono state individuate le seguenti categorie che, per comodità, raggruppiamo in classi distinte che meglio aiutano a comprenderle e gestirle Ricettività Strutture o spazi destinati ad ospitare persone e cose. Categoria Affittacamere Albergo Bed and Breakfast Boat and Breakfast Case e appartamenti per vacanze Ostello Camping Residence Area sosta camper Significato Strutture composte da non più di sei camere, ubicate in non più di due appartamenti ammobiliati in uno stesso stabile, nei quali sono forniti alloggio ed eventualmente servizi complementari. Strutture per l'ospitalità, a pagamento, a bordo di imbarcazioni (o navi) ormeggiate in porto, comprendente il pernottamento e la prima colazione. Immobili arredati gestiti in forma imprenditoriale per l'affitto ai turisti, senza offerta di servizi centralizzati, nel corso di una o più stagioni, con contratti aventi validità non superiore ai tre mesi consecutivi. Aree adibite a campeggio. Esercizi ricettivi a gestione unitaria che forniscono alloggio e servizi accessori (pulizia, cambio biancheria, manutenzione) in unità abitative arredate costituite da uno o più locali, dotate di servizio autonomi di cucina. Area, eventualmente attrezzata con servizi quali corrente elettrica, acqua, servizi igienici, smaltimento acque nere, etc., destinata alla sosta di camper Ristorazione Strutture destinate alla ristorazione di persone. 47
239 Categoria Bar Caffè Fast food Gelateria Pizzeria Ristorante Significato Locale in grado di erogare secondo le licenze i seguenti servizi: caffetteria, somministrazione di bevande alcoliche, vendita piatti freddi, vendita di piatti caldi. Locale con una cucina costituita principalmente da hamburger, hot dog, cotolette, patate fritte, pizze, sandwich ma anche da altri cibi derivati da cucine etniche come la cipolla fritta e il kebab, e suggerisce l'uso massiccio di diverse salse come senape, maionese e ketchup. Il fast food è in genere caratterizzato da un costo relativamente modesto, dall'uniformità del servizio offerto e dall'ampia diffusione dei punti vendita. Locale che vende principalmente gelati di produzione propria o comunque artigianale. Locale dove si possono consumare sul posto o consumare da asporto principalmente pizze, calzoni e fritti vari, ma in cui spesso è possibile trovare anche altre tipologie di pietanze Cultura Strutture o spazi legati alla cultura in senso lato. Categoria Centro culturale Galleria d'arte Mediateca Significato Luogo organizzato e attrezzato per contenere servizi collettivi che prediligono la dimensione relazionale e culturale tra le persone. Luogo organizzato - gestito solitamente da privati o associazioni - dedicato all'esposizione anche temporanea di opere d'arte intese in senso ampio. Luogo dove vengono raccolte produzioni multimediali contenute in vari supporti: videocassette, CD, DVD, pellicole cinematografiche. Museo Pinacoteca Biblioteca Teatro Archivio Luogo principalmente destinato alla conservazione di atti, scritture e documenti prodotti e/o acquisiti da un soggetto pubblico o privato (ente, istituzione, famiglia o individuo nel normale esercizio delle proprie funzioni), durante lo svolgimento della propria attività, e custoditi in funzione del loro valore di attestazione e di tutela di un determinato interesse. L'interesse potrà essere di varia natura: politico-sociale (amministrativo, giudiziario, scientifico, militare, religioso, etc.) o patrimoniale. 48
240 4.1.4.Servizi Strutture o spazi destinati ad erogare servizi alla collettività. Categoria Ascensore Bagno pubblico Ambasciata o Consolato Farmacia e parafarmacia Internet point Noleggio biciclette Noleggio imbarcazioni Ospedali Pronto soccorso Telefoni pubblici Significato Luogo principalmente destinato alla vendita di tabacchi e derivati. Tabacchino Ufficio postale Zona WiFi Cimitero Fiera Centro congressi Pubblica sicurezza Questura, Commissariati di zona, Caserme dei carabinieri, Caserme cdlla Guardia di finanza, Caserme della Guardia Forestale, Caserme dei Vigili del Fuoco, etc. Banca Bancomat Cambio valute Lavanderia Tempo libero Strutture o spazi destinati alla fruizione di servizi legati al tempo libero. Categoria Centro benessere Parrucchiere Cinema Diving Center Impianto sportivo Significato Struttura che opera per il benessere, il relax e la cura del corpo. Arena, stadio o edificio similare o campo sportivo in cui si tengono le competizioni sportive o allenamenti per discipline sportive sia individuali che di squadra. Maneggio Stabilimento balneare Agenzie di scommesse Locali e ritrovi 49
241 4.1.6.Trasporti Strutture o spazi destinati al trasporto di cose o persone. Categoria Aeroporto Azienda trasporti locale Autonoleggio e noleggio con conducente Fermata autobus Fermata metro Parcheggi auto Porto Stazione autobus Stazione treni Postazioni taxi Aree ciclabili Aree pedonali Significato Stazione aeroportuale. Sede azienda di trasporti locale Turismo Strutture o spazi che erogano specifici servizi dedicati al turismo. Categoria Info Point Agenzie di viaggi Associazioni guide turistiche Bus turistici Deposito bagagli Escursioni in barca Tour e Visite guidate Significato Punto informazioni turistiche Punto di partenza e fermate bus dedicati alle visite turistiche Punto di partenza escursioni in barca Punto di partenza visite guidate Storia Strutture o spazi di rilevanza storica. Categoria Presidio difensivo storico Rifugio sotterraneo Bastione Cavità sotterranea Faro Monumento Palazzo storico Pozzo o cisterna Chiesa Convento o monastero Cripta Sito archeologico Torre Fontana Relitto Significato 50
242 4.1.9.Natura Strutture o spazi di interesse naturalistico. Categoria Zoo Spiaggia Parco Area di interesse naturalistico Area verde Zona umida Punto panoramico Significato Negozio Strutture o spazi dedicati alla vendita di merci. Categoria Edicola Significato Luogo principalmente destinato alla vendita di quotidiani e periodici. Alimentari Prodotti tipici Include Enogastronomia tradizionale, Artigianato tipico e tradizionale, Souvenir Libreria Mercatino all'aperto Abbigliamento e accessori Articoli regalo Antiquariato Biglietti per concerti e spettacoli Centro commerciale Include mercati, supermercati e grandi magazzini Giocattoli Fiori Arte, musica, hobby Altro Altre categorie da identificare che non ricadono nelle classi su elencate Sinonimi Categorie POI Ad ogni categoria POI sono associati sinonimi. I sinonimi sono espressi in linguaggio naturale e dunque dipendono dalla lingua scelta. Ovviamente un sinonimo non può essere una specificazione della categoria, ovvero un attributo della categoria, in quanto questa informazione dovrà essere contenuta nei Tag dei POI (vedi oltre). Di seguito alcuni esempi Ricettività Categoria Albergo Bed and Breakfast Boat and Breakfast Case e appartamenti per vacanze Valori (Hotel, Alberghetto) (B&B, Bed&Breakfast) (Boat&Breakfast) 51
243 Ostello Camping Residence Area sosta camper Ristorazione Categoria Bar Caffè Fast food Gelateria Pizzeria Ristorante Valori (caffetteria) (pizzeria d asporto) Cultura Categoria Centro culturale Galleria d'arte Mediateca Museo Pinacoteca Biblioteca Teatro Archivio Valori (auditorium, sala di musica) Servizi Categoria Ascensore Bagno pubblico Ambasciata o Consolato Farmacia e parafarmacia Internet point Noleggio biciclette Noleggio imbarcazioni Ospedali Pronto soccorso Telefoni pubblici Tabacchino Ufficio postale Zona WiFi Cimitero Fiera Centro congressi Pubblica sicurezza Banca Valori (scala mobile) (toilette) (noleggio bici) (rivendita tabacchi, sigarette) (posto di polizzia) (istituto di credito, istituto di risparmio, istituto finanziario, cassa di risparmio) 52
244 Bancomat Cambio valute Luogo di culto Lavanderia (sportello automatico) Tempo libero Categoria Centro benessere Parrucchiere Cinema Diving Center Impianto sportivo Maneggio Stabilimento balneare Agenzie di scommesse Locali e ritrovi Valori Trasporti Categoria Aeroporto Azienda trasporti locale Autonoleggio e noleggio con conducente Fermata autobus Fermata metro Parcheggi auto Porto Stazione autobus Stazione treni Postazioni taxi Valori (fermata bus) (pista per biciclette, pista ciclabile) (ZTL) Aree ciclabili Aree pedonali Turismo Categoria Valori Info Point (centro informazioni) Agenzie di viaggi Associazioni guide turistiche Bus turistici Deposito bagagli Escursioni in barca Tour e Visite guidate (guida) Storia Categoria Presidio difensivo storico Rifugio sotterraneo Valori 53
245 Bastione Cavità sotterranea Faro Monumento Palazzo storico Pozzo o cisterna Chiesa Convento o monastero Cripta Sito archeologico Torre Fontana Relitto (grotta) (rovine) Natura Categoria Zoo Spiaggia Parco Area di interesse naturalistico Area verde Zona umida Punto panoramico Valori (stagno) (belvedere) Negozio Edicola Alimentari (rivendita giornali) (negozio di cibo e bevande) Prodotti tipici Libreria Mercatino all'aperto (negozio di libri) Abbigliamento (negozio di vestiti, negozio di vestiario) Accessori Gioielleria (boutique, negozio di vestiti, negozio di vestiario) (valigeria) (negozio di gioielli) Calzature (negozio di scarpe) Profumeria Tessuti e stoffe Articoli regalo Antiquariato Biglietti per concerti e spettacoli (negozio di profumi) Abbigliamento alta moda e stilisti Centro commerciale Giocattoli Fiori Arte, musica, hobby (ticket office) (mercato, supermercato, grande magazzino) (negozio di giochi) (negozio di piante) (dischi, CD, bricolage, fai 54
246 da te, quadri) 4.3. Tag POI Come detto in precedenza l entità tag descrive una proprietà applicata al POI. Le proprietà sono contraddistinte da coppie chiave-valore che descrivono l'elemento. Le chiavi appartengono ad un dizionario chiuso, mentre, a seconda della chiave, i valori possono appartenere o meno ad un dizionario chiuso. Chiavi e valori sono espresse in linguaggio naturale e dunque dipendono dalla lingua scelta. Nel caso dell italiano, di seguito riportiamo i tag principali per le categorie individuate. La sintassi è analoga a quella di un Document Type Definition (DTD):, implica una sequenza di valori; implica una scelta tra valori; cardinalità dei valori (da specificare subito dopo il loro nome): non specificata indica che il valore è presente una sola volta;? indica che l'elemento è presente zero o una sola volta; * indica che l'elemento è presente zero o più volte; + indica che l'elemento è presente una o più volte. E possibile avere strutture nidificate indicate con la sintassi <chiave>=(valore). Esempio: chiave orario valori (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì?>=, <venerdì?>=, <sabato?>=, <domenica?>=, <tutti i giorni?>=) si può esplicitare in: orario lunedì , martedì , mercoledì , giovedì , venerdì , sabato , domenica chiuso-close oppure orario domenica chiuso Ricettività Categoria Chiave tipologia numerostelle Albergo servizi Valori (motel pensione) (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) (piscina, animali domestici ammessi, camere per fumatori, servizio in camera, wifi, carte di credito accettate) prezzo 55
247 numerostelle Bed and Breakfast servizi (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) (animali domestici ammessi, camere per fumatori, cucinino, wifi, carte di credito accettate) prezzo Boat and Breakfast Case e appartamenti per vacanze numerostelle prezzo prezzo numerostelle Ostello (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) servizi (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) (animali domestici ammessi, camere per fumatori, lavanderia, wifi, carte di credito accettate) prezzo Camping numerostelle servizi (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) (animali domestici ammessi, cucinino, lavanderia, wifi, carte di credito accettate) prezzo numerostelle Residence servizi (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) (animali domestici ammessi, camere per fumatori, lavanderia, cucinino, wifi, carte di credito accettate) prezzo Area sosta camper Ristorazione Bar Caffè Categoria Chiave specialita specialita Fast food tipologia Gelateria Pizzeria caratteristica specifica cucina caratteristica menuspeciali servizi Valori (wine bar) (caffè napoletano) (mcdonald burger king paninoteca) (artigianale) (pizza d asporto, pizza al metro, pizza domicilio) (pizza napoletana) (forno a legna) (menu di lavoro, menu per bambini, menu per cerimonie, menu per gruppi) (prenotazione accettata, animazione per bambini, locale con sala da ballo, 56
248 affitto per feste private, affitto per matrimoni, affitto per ricevimenti, affitto per cene private, affitto per pranzi privati, parcheggio interno, aria condizionata, animali domestici ammessi, sala interna fumatori, wifi, carte di credito accettate) prezzo numerostelle cucina specialita caratteristica Ristorante orario menuspeciali tipologia servizi (1 stella 2 stelle 3 stelle 4 stelle 5 stelle) (cucina asiatica, cucina cinese, cucina francese, cucina greca, cucina indiana, cucina giapponese, cucina messicana, cucina italiana, cucina mediterranea, cucina classica, cucina creativa, cucina americana, cucina regionale, cucina tradizionale, cucina campana, cucina etnica, cucina specifica per ciliaci) (specialità carne, specialità pesce, specialità frutti di mare, vegetariano, specialità stagionali, cantina vini) (tipico, slow food) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (menu di lavoro, menu per bambini, menu per cerimonie, menu per gruppi) (trattoria osteria tavola calda rosticceria) (prenotazione accettata, animazione per bambini, locale con sala da ballo, affitto per feste private, affitto per matrimoni, affitto per ricevimenti, affitto per cene private, affitto per pranzi privati, parcheggio interno, aria condizionata, animali domestici ammessi, sala interna fumatori, wifi, carte di credito accettate) prezzo 57
249 4.3.3.Cultura Categoria Chiave orario Centro culturale servizi numeromassimovisitator i tipologiavisitarore prezzobiglietto Galleria d'arte orario servizi (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) orario (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) servizi (prenotazione accettata carte di credito accettate) numeromassimovisitator i tipologiavisitarore prezzobiglietto Museo (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) numeromassimovisitator i tipologiavisitarore prezzobiglietto Mediateca Valori (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata, carte di credito accettate), (bambino, adulto, esperto) orario (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) servizi (prenotazione accettata carte di credito accettate) numeromassimovisitator i tipologiavisitarore prezzobiglietto, (bambino, adulto, esperto) orario (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) servizi (prenotazione Pinacoteca accettata, 58
250 carte di credito accettate) numeromassimovisitator i tipologiavisitarore prezzobiglietto Biblioteca orario (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) servizi (prenotazione accettata carte di credito accettate) numeromassimovisitator i tipologiavisitarore prezzobiglietto Teatro, (bambino, adulto, esperto) orario (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) servizi (prenotazione accettata carte di credito accettate) numeromassimovisitator i tipologiavisitarore prezzobiglietto tipologia (bambino, adulto, esperto) orario Archivio (bambino, adulto, esperto) servizi numeromassimovisitator i tipologiavisitarore prezzobiglietto, (lirico, comunale) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata, carte di credito accettate) (bambino, adulto, esperto) Servizi Categoria Ascensore Bagno pubblico Ambasciata o Consolato Farmacia e parafarmacia Internet point Noleggio biciclette Noleggio imbarcazioni Ospedali Pronto soccorso Chiave Valori 59
251 Telefoni pubblici Tabacchino Ufficio postale Zona WiFi Cimitero tipologia (cimitero monumentale cimitero ebraico) tipologia (carabinieri, guardia di finanza, polizia, questura) Fiera Centro congressi Pubblica sicurezza Banca Bancomat Cambio valute Luogo di culto tipologia Lavanderia specialita (parrocchia chiesa sinagoga tempio moschea) a gettoni self service automatica) Tempo libero Categoria Chiave Centro benessere specifica Parrucchiere Cinema Diving Center specifica Impianto sportivo Valori (estetista, manicure, pedicure, massaggi, depilazione) (uomo, donna, unisex) specialita (piscina, palestra, campo di calcio, campo sportivo, campo di pallacanestro, campo di golf, campo di calcetto, campo da tennis, campo di pallavolo) tipologia (birreria, pub, cabaret, discobar, discopub, discoteca, internet caffè, cyber pub, night club, piano bar, sala da ballo e dancing, vineria, wine bar) Maneggio Stabilimento balneare Agenzie di scommesse Locali e ritrovi Trasporti Categoria Aeroporto Azienda trasporti locale Autonoleggio e noleggio con conducente Chiave Valori 60
252 Fermata autobus Fermata metro Parcheggi auto Porto Stazione autobus Stazione treni Postazioni taxi Aree ciclabili Aree pedonali specialita (a pagamento gratuito) Turismo Categoria Chiave orario Info Point Valori (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) Agenzie di viaggi Associazioni guide turistiche Bus turistici Deposito bagagli Escursioni in barca Tour e Visite guidate Storia Categoria Chiave orario Presidio difensivo storico servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Rifugio sotterraneo servizi Bastione numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Valori (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? 61
253 >=, <domenica?>=, <tutti i giorni?>=) servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Cavità sotterranea servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Faro servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Monumento servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Palazzo storico servizi Pozzo o cisterna numeromassimovisitatori prezzobiglietto tipologiavisitarore orario (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i 62
254 giorni?>=) servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore Tipologia Chiesa orario servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Convento o monastero servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Cripta servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Sito archeologico servizi Torre numeromassimovisitatori prezzobiglietto tipologiavisitarore orario (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (cattedrale santuario abbazia certosa basilica cappella duomo pieve battistero) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate), (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? 63
255 >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate) servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Fontana (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate) servizi numeromassimovisitatori prezzobiglietto tipologiavisitarore orario Relitto numeromassimovisitatori prezzobiglietto tipologiavisitarore, (bambino, adulto, esperto) (<lunedì?>=, <martedì?>=, <mercoledì?>=, <giovedì? >=, <venerdì?>=, <sabato? >=, <domenica?>=, <tutti i giorni?>=) (prenotazione accettata carte di credito accettate) servizi,, (bambino, adulto, esperto) Natura Categoria Zoo Chiave orario Valori (<lunedì?>=, <martedì? >=, <mercoledì?>=, <giovedì?>=, <venerdì? >=, <sabato?>=, <domenica?>=, <tutti i giorni?>=) prezzobiglietto Spiaggia Parco Area di interesse naturalistico Area verde Zona umida Punto panoramico 64
256 Negozio Categoria Chiave Valori Edicola Alimentari Prodotti tipici specialita (panetteria, macelleria, negozio di formaggi, negozio di cioccolato, negozio di caffè, pasticceria, drogheria, latteria, fruttivendolo, negozio di ortofrutta, negozio di prodotti naturali ed ecologici, negozio di pasta fresca, pescheria, negozio di the, enoteca, negozio di enogastronomia) specialita (enogastronomia tradizionale, artigianato tipico, artigianato tradizionale, souvenir) Libreria Mercatino all'aperto tipologia Abbigliamento specialita (uomo, donna, bambino, premaman) (taglie forti, abiti da matrimonio, abiti da sposa, abiti da cerimonia, abiti su misura) marchi Abbigliamento alta moda e stilisti Accessori Gioielleria Calzature marchi marchi marchi tipologia (uomo, donna, bambino, sportive, sneakers) specialita (su misura) marchi Profumeria Tessuti e stoffe Articoli regalo Antiquariato Biglietti per concerti e spettacoli Centro commerciale Giocattoli Fiori Arte, musica, hobby 65
257 4.4. Sinonimi Tag POI Ad ogni chiave e valore del TAG POI possono essere associati sinonimi. I sinonimi sono espressi in linguaggio naturale e dunque dipendono dalla lingua scelta. 66
258 5 Diagramma ER Figura 12: Diagramma ER Data Base di POI 67
259 6 Script SQL -- MySQL Script generated by MySQL Workbench -- Model: POIModel Version: 1.0 SET UNIQUE_CHECKS=0; SET FOREIGN_KEY_CHECKS=0; SET SQL_MODE='TRADITIONAL,ALLOW_INVALID_DATES'; Schema POIDataBase DROP SCHEMA IF EXISTS `POIDataBase` ; CREATE SCHEMA IF NOT EXISTS `POIDataBase` DEFAULT CHARACTER SET utf8 COLLATE utf8_general_ci ; SHOW WARNINGS; USE `POIDataBase` ; Table `POIDataBase`.`Lingua` DROP TABLE IF EXISTS `POIDataBase`.`Lingua` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Lingua` ( `IDLingua` CHAR(2) NOT NULL, `Lingua` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDLingua`)) ENGINE = InnoDB; SHOW WARNINGS; Table `POIDataBase`.`Provincia` DROP TABLE IF EXISTS `POIDataBase`.`Provincia` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Provincia` ( `CodiceISTATProvincia` CHAR(3) NOT NULL, `Provincia` VARCHAR(255) NOT NULL, PRIMARY KEY (`CodiceISTATProvincia`)) ENGINE = InnoDB; SHOW WARNINGS; CREATE UNIQUE INDEX (`CodiceISTATProvincia` ASC); `CodiceISTATProvincia_UNIQUE` ON `POIDataBase`.`Provincia` SHOW WARNINGS; Table `POIDataBase`.`Comune` DROP TABLE IF EXISTS `POIDataBase`.`Comune` ; SHOW WARNINGS; 68
260 CREATE TABLE IF NOT EXISTS `POIDataBase`.`Comune` ( `CodiceISTATComune` CHAR(6) NOT NULL, `Comune` VARCHAR(255) NOT NULL, `CodiceISTATProvincia` CHAR(3) NOT NULL, PRIMARY KEY (`CodiceISTATComune`), CONSTRAINT `CodiceISTATProvincia` FOREIGN KEY (`CodiceISTATProvincia`) REFERENCES `POIDataBase`.`Provincia` (`CodiceISTATProvincia`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE UNIQUE INDEX `CodiceISTAT_UNIQUE` ON `POIDataBase`.`Comune` (`CodiceISTATComune` ASC); SHOW WARNINGS; CREATE INDEX `CodiceISTATProvincia_idx` ON `POIDataBase`.`Comune` (`CodiceISTATProvincia` ASC); SHOW WARNINGS; Table `POIDataBase`.`SpecificaIndirizzo` DROP TABLE IF EXISTS `POIDataBase`.`SpecificaIndirizzo` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`SpecificaIndirizzo` ( `IDSpecificaIndirizzo` INT NOT NULL, `SpecificaIndirizzo` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDSpecificaIndirizzo`)) ENGINE = InnoDB; SHOW WARNINGS; Table `POIDataBase`.`IntermezzoIndirizzo` DROP TABLE IF EXISTS `POIDataBase`.`IntermezzoIndirizzo` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`IntermezzoIndirizzo` ( `IDIntermezzoIndirizzo` INT NOT NULL, `IntermezzoIndirizzo` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDIntermezzoIndirizzo`)) ENGINE = InnoDB; SHOW WARNINGS; Table `POIDataBase`.`ComuneCAP` DROP TABLE IF EXISTS `POIDataBase`.`ComuneCAP` ; 69
261 SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`ComuneCAP` ( `IDComuneCAP` INT NOT NULL, `CodiceISTATComune` CHAR(6) NOT NULL, `CAP` CHAR(5) NOT NULL, PRIMARY KEY (`IDComuneCAP`), CONSTRAINT `CodiceISTATComune_idx` FOREIGN KEY (`CodiceISTATComune`) REFERENCES `POIDataBase`.`Comune` (`CodiceISTATComune`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `CodiceISTATComune_idx_idx` (`CodiceISTATComune` ASC); ON `POIDataBase`.`ComuneCAP` SHOW WARNINGS; Table `POIDataBase`.`Indirizzo` DROP TABLE IF EXISTS `POIDataBase`.`Indirizzo` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Indirizzo` ( `IDIndirizzo` INT NOT NULL, `IDSpecificaIndirizzo` INT NOT NULL, `IDIntermezzoIndirizzo` INT NULL, `IDComuneCAP` INT NOT NULL, `Nome` VARCHAR(255) NOT NULL, PRIMARY KEY (`IDIndirizzo`), CONSTRAINT `IDSpecifcicaIndirizzo_idx` FOREIGN KEY (`IDSpecificaIndirizzo`) REFERENCES `POIDataBase`.`SpecificaIndirizzo` (`IDSpecificaIndirizzo`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDIntermezzoIndirizzo_idx` FOREIGN KEY (`IDIntermezzoIndirizzo`) REFERENCES `POIDataBase`.`IntermezzoIndirizzo` (`IDIntermezzoIndirizzo`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDComuneCAP_idx` FOREIGN KEY (`IDComuneCAP`) REFERENCES `POIDataBase`.`ComuneCAP` (`IDComuneCAP`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDSpecifcicaIndirizzo_idx_idx` ON `POIDataBase`.`Indirizzo` (`IDSpecificaIndirizzo` ASC); SHOW WARNINGS; CREATE INDEX `IDIntermezzoIndirizzo_idx_idx` ON `POIDataBase`.`Indirizzo` (`IDIntermezzoIndirizzo` ASC); 70
262 SHOW WARNINGS; CREATE INDEX `IDComuneCAP_idx_idx` ON `POIDataBase`.`Indirizzo` (`IDComuneCAP` ASC); SHOW WARNINGS; Table `POIDataBase`.`POI` DROP TABLE IF EXISTS `POIDataBase`.`POI` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`POI` ( `IDPOI` INT NOT NULL AUTO_INCREMENT, `IDIndirizzo` INT NULL, `NumeroCivicoIndirizzo` VARCHAR(5) NULL, `Web` VARCHAR(255) NULL, `NomeAutore` VARCHAR(255) NOT NULL, `DataInserimento` DATETIME NOT NULL, `DataAggiornamento` DATETIME NULL, `DataCancellazione` DATETIME NULL, `Note` BLOB NULL, `TefefonoContatto` VARCHAR(20) NULL, ` Contatto` VARCHAR(255) NULL, PRIMARY KEY (`IDPOI`), CONSTRAINT `IDIndirizzo_idx` FOREIGN KEY (`IDIndirizzo`) REFERENCES `POIDataBase`.`Indirizzo` (`IDIndirizzo`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE UNIQUE INDEX `IDPOI_UNIQUE` ON `POIDataBase`.`POI` (`IDPOI` ASC); SHOW WARNINGS; CREATE INDEX `IDIndirizzo_idx_idx` ON `POIDataBase`.`POI` (`IDIndirizzo` ASC); SHOW WARNINGS; Table `POIDataBase`.`URI` DROP TABLE IF EXISTS `POIDataBase`.`URI` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`URI` ( `IDPOI` INT NOT NULL, `URIValue` VARCHAR(255) NOT NULL, PRIMARY KEY (`URIValue`, `IDPOI`), CONSTRAINT `PRIMARY` FOREIGN KEY (`IDPOI`) REFERENCES `POIDataBase`.`POI` (`IDPOI`) ON DELETE CASCADE ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; 71
263 CREATE INDEX `POI_PRIMARY_idx` ON `POIDataBase`.`URI` (`IDPOI` ASC); SHOW WARNINGS; Table `POIDataBase`.`Categoria` DROP TABLE IF EXISTS `POIDataBase`.`Categoria` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Categoria` ( `IDCategoria` INT NOT NULL, `IDLingua` CHAR(2) NOT NULL, `Categoria` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDCategoria`, `IDLingua`), CONSTRAINT `IDLingua_ixd` FOREIGN KEY (`IDLingua`) REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDLingua_ixd_idx` ON `POIDataBase`.`Categoria` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`CategoriePOI` DROP TABLE IF EXISTS `POIDataBase`.`CategoriePOI` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`CategoriePOI` ( `IDPoi` INT NOT NULL, `IDCategoria` INT NOT NULL, `IDLingua` CHAR(2) NOT NULL, PRIMARY KEY (`IDPoi`, `IDCategoria`, `IDLingua`), CONSTRAINT `IDCategoria_idx` FOREIGN KEY (`IDCategoria`) REFERENCES `POIDataBase`.`Categoria` (`IDCategoria`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDPOI_idx` FOREIGN KEY (`IDPoi`) REFERENCES `POIDataBase`.`POI` (`IDPOI`) ON DELETE CASCADE ON UPDATE CASCADE, CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; 72
264 CREATE INDEX `IDCategoria_idx_idx` ON `POIDataBase`.`CategoriePOI` (`IDCategoria` ASC); SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`CategoriePOI` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`DescrizionePOI` DROP TABLE IF EXISTS `POIDataBase`.`DescrizionePOI` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`DescrizionePOI` ( `IDPOI` INT NOT NULL, `IDLingua` INT NOT NULL, `Nome` VARCHAR(45) NOT NULL, `Descrizione` BLOB NULL, PRIMARY KEY (`IDPOI`, `IDLingua`), CONSTRAINT `IDPOI_idx` FOREIGN KEY (`IDPOI`) REFERENCES `POIDataBase`.`POI` (`IDPOI`) ON DELETE CASCADE ON UPDATE CASCADE, CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`DescrizionePOI` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`Chiave` DROP TABLE IF EXISTS `POIDataBase`.`Chiave` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Chiave` ( `IDChiave` INT NOT NULL, `IDLingua` CHAR(2) NOT NULL, `IDCategoria` INT NOT NULL, `Chiave` VARCHAR(45) NOT NULL, `SintassiValore` VARCHAR(255) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDChiave`, `IDLingua`), CONSTRAINT `IDCategoria_idx` FOREIGN KEY (`IDCategoria`) REFERENCES `POIDataBase`.`Categoria` (`IDCategoria`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) 73
265 REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`Chiave` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`Classe` DROP TABLE IF EXISTS `POIDataBase`.`Classe` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Classe` ( `IDClasse` INT NOT NULL, `IDLingua` CHAR(2) NOT NULL, `Classe` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDClasse`, `IDLingua`), CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`Classe` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`ClasseCategoria` DROP TABLE IF EXISTS `POIDataBase`.`ClasseCategoria` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`ClasseCategoria` ( `IDClasse` INT NOT NULL, `IDCategoria` INT NOT NULL, `IDLingua` CHAR(2) NOT NULL, PRIMARY KEY (`IDClasse`, `IDCategoria`, `IDLingua`), CONSTRAINT `IDClasse_idx` FOREIGN KEY (`IDClasse`) REFERENCES `POIDataBase`.`Classe` (`IDClasse`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDCategoria_idx` FOREIGN KEY (`IDCategoria`) REFERENCES `POIDataBase`.`Categoria` (`IDCategoria`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) 74
266 REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDCategoria_idx_idx` ON `POIDataBase`.`ClasseCategoria` (`IDCategoria` ASC); SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`ClasseCategoria` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`TAG` DROP TABLE IF EXISTS `POIDataBase`.`TAG` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`TAG` ( `IDPOI` INT NOT NULL, `IDLingua` INT NOT NULL, `IDchiave` INT NOT NULL, `Valore` VARCHAR(255) NOT NULL, PRIMARY KEY (`IDPOI`, `IDLingua`, `IDchiave`, `Valore`), CONSTRAINT `IDPOI_idx` FOREIGN KEY (`IDPOI`) REFERENCES `POIDataBase`.`POI` (`IDPOI`) ON DELETE CASCADE ON UPDATE CASCADE, CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE RESTRICT ON UPDATE CASCADE, CONSTRAINT `IDChiave_idx` FOREIGN KEY (`IDchiave`) REFERENCES `POIDataBase`.`Chiave` (`IDChiave`) ON DELETE RESTRICT ON UPDATE CASCADE) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDPOI_idx_idx` ON `POIDataBase`.`TAG` (`IDPOI` ASC); SHOW WARNINGS; CREATE INDEX `IDChiave_idx_idx` ON `POIDataBase`.`TAG` (`IDchiave` ASC); SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`TAG` (`IDLingua` ASC); SHOW WARNINGS; Table `POIDataBase`.`SistemaRIferimento` DROP TABLE IF EXISTS `POIDataBase`.`SistemaRIferimento` ; 75
267 SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`SistemaRIferimento` ( `IDSistemaRiferimento` INT NOT NULL, `SistemaRiferimento` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, PRIMARY KEY (`IDSistemaRiferimento`)) ENGINE = InnoDB; SHOW WARNINGS; CREATE UNIQUE INDEX `IDSistemaRiferimento_UNIQUE` ON `POIDataBase`.`SistemaRIferimento` (`IDSistemaRiferimento` ASC); SHOW WARNINGS; Table `POIDataBase`.`GeografiaPOI` DROP TABLE IF EXISTS `POIDataBase`.`GeografiaPOI` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`GeografiaPOI` ( `IDPOI` INT NOT NULL, `IDSistemaRiferimento` INT NOT NULL, `CoordinateBaricentroPOI` POINT NOT NULL, `AltimetriaBaricentroPOI` INT NULL, `GeometriaPOI` GEOMETRY NULL, PRIMARY KEY (`IDPOI`, `IDSistemaRiferimento`), CONSTRAINT `IDPOI_idx` FOREIGN KEY (`IDPOI`) REFERENCES `POIDataBase`.`POI` (`IDPOI`) ON DELETE CASCADE ON UPDATE CASCADE, CONSTRAINT `IDSistemaRiferimento_idx` FOREIGN KEY (`IDSistemaRiferimento`) REFERENCES `POIDataBase`.`SistemaRIferimento` (`IDSistemaRiferimento`) ON DELETE NO ACTION ON UPDATE NO ACTION) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDSistemaRiferimento_idx_idx` (`IDSistemaRiferimento` ASC); ON `POIDataBase`.`GeografiaPOI` SHOW WARNINGS; Table `POIDataBase`.`Dizionario` DROP TABLE IF EXISTS `POIDataBase`.`Dizionario` ; SHOW WARNINGS; CREATE TABLE IF NOT EXISTS `POIDataBase`.`Dizionario` ( `IDLingua` CHAR(2) NOT NULL, `Vocabolo` VARCHAR(45) NOT NULL, `SinomimoVariante` VARCHAR(45) NOT NULL, `Descrizione` VARCHAR(255) NULL, 76
268 PRIMARY KEY (`IDLingua`, `Vocabolo`, `SinomimoVariante`), CONSTRAINT `IDLingua_idx` FOREIGN KEY (`IDLingua`) REFERENCES `POIDataBase`.`Lingua` (`IDLingua`) ON DELETE NO ACTION ON UPDATE NO ACTION) ENGINE = InnoDB; SHOW WARNINGS; CREATE INDEX `IDLingua_idx_idx` ON `POIDataBase`.`Dizionario` (`IDLingua` ASC); SHOW WARNINGS; CREATE INDEX `SinonimoVariante_idx_idx` ON `POIDataBase`.`Dizionario` (`SinomimoVariante` ASC); SHOW WARNINGS; CREATE INDEX `Vocabolo_idx_idx` ON `POIDataBase`.`Dizionario` (`Vocabolo` ASC); SHOW WARNINGS; SET SQL_MODE=@OLD_SQL_MODE; SET FOREIGN_KEY_CHECKS=@OLD_FOREIGN_KEY_CHECKS; SET UNIQUE_CHECKS=@OLD_UNIQUE_CHECKS; 77
269 7 Acronimi W3C World Wide Web Consortium OGC Open Geospatial Consortium GPS Global Positioning System API Application Programming Interface SWG Standards Working Group URI Uniform Resource Identifier WFS OGC Web Feature Service OSM OpenStreetMap XAPI Extended API DTD Document Type Definition ER Entity-Relationship POI Point of Interest SQL Structured Query Language 78
270 8 Bibliografia 1. World Wide Web Consortium, Points of Interest Working Group, 2. Points of Interest Core W3C Working Draft, 3. Thomas Spangenberg, Standardization, Modeling and Implementation of Points of Interest a Touristic Perspective, International Journal of u- and e- Service, Science and Technology Vol.6, No.6 (2013), pp L. Baltrunas, B. Ludwig, S. Peer and F. Ricci, Context-aware places of interest recommendations and explanations, 1st Workshop on Decision Making and Recommendation Acceptance Issues in Recommender Systems, Girona, Spain, (2011). 79
271 Technical Report TR D3.5.4 Analisi dello stato dell arte sulle tecniche di information processing per la ricerca di informazioni georeferenziate e metodologie utilizzate per la estrazione dei POI Il presente documento costituisce il technical report TR D3.5.4 previsto nel report di ricerca D3.5 Relazione su scenari, modelli implementativi e specifiche architetturali/funzionali di soluzioni di image processing ed information processing per la generazione massiva di punti di interesse georeferenziati nei parchi impliciti (smartspotting) del progetto NeoLuoghi.
272 Indice 1 Introduzione Information processing Information retrieval Sistemi esistenti Information extraction Sistemi esistenti Data mining Sistemi esistenti Geographic information retrieval Query geografiche e spaziali Tipologie di query geografiche Navigazione geografica Indicizzazione geografica e spaziale Metodologia per geographic information retrieval Sistemi esistenti Geographic information system Gazetteer Management Software Estrazione di POI Estrazione Pre-elaborazione della sorgente Banche dati non-strutturate Banche dati semi--strutturate Banche dati strutturate Estrazione vera e propria delle informazioni Banche dati non-strutturate Banche dati semi--strutturate Banche dati strutturate Creazione formato intermedio Trasformazione Caricamento Acronimi Bibliografia
273 Figure Figura 1: Relazioni topologiche Figura 2: Query spaziale Punto Figura 3: Query spaziale Linea Figura 4: Query spaziale Poligono Figura 5: Query spaziale Buffer...19 Figura 6: Schema ETL
274 1 Introduzione Lo sviluppo esponenziale del Web mette oggi a disposizione una quantità potenzialmente infinita di contenuti informativi in formato digitale. Questa crescita di quantità di dati accessibili è stata accompagnata da un aumento notevole dei formati di rappresentazione e di gestione. E possibile distinguere tre categorie in cui racchiudere tali formati: 1. formati di dati strutturati come i database relazionali; 2. formati di dati semi-strutturati come pagine HTML e XML; 3. formati di dati non strutturati come i documenti testuali (text free). I dati strutturati (quelli già inseriti in database, organizzati e pronti per essere gestiti da applicazioni informatiche) sono facilmente gestibili e rappresentano, peraltro, solo una parte minoritaria delle informazioni disponibili. Le difficoltà maggiori di gestione provengono dai dati non strutturati o semi-strutturati, cioè informazioni digitali non catalogate e non classificate o solo parzialmente catalogate e classificate. Solitamente si tratta di documenti, e quindi di insiemi di dati articolati e complessi, di origine e formato anche molto diversi. Tali sorgenti di informazioni, pur essendo capaci di fornire un enorme mole di dati da utilizzare in applicazioni reali, risultano essere, in massima parte, difficili da manipolare in maniera automatica dai programmi software. Tutto ciò ha portato, negli ultimi anni, allo sviluppo di studi e tecniche riguardanti il trattamento automatico delle informazioni che hanno dato origine ad approcci e sistemi destinati ad esempio ad estrarre informazioni da pagine Web e/o annotarne automaticamente i contenuti. Le tecniche utilizzate non hanno una classificazione univoca e, in generale, rientrano nella sfera dei processi, tecniche ed attività che vanno sotto il nome di Information Processing e più specificatamente: information retrieval (IR); information extraction (IE); data minig. Recentemente, alle tecniche sopra citate, si è aggiunta una nuova disciplina, la geographic information retrieval, che può essere considerata una specializzazione della information retrieval e riguarda la ricerca ed il trattamento di informazioni a cui sono associate attributi geografici (coordinate geografiche, nome di luoghi, indirizzi, etc.) 1. Questa disciplina appare di notevole importanza nel contesto del progetto di ricerca ed in particolare per quanto riguarda il componente smartspotting che vuole le metodologie per la generazione, normalizzazione, standardizzazione e restituzione di specifiche informazioni georeferenziate (Punti di Interesse o Point of Interest 2 ). Nel seguito del documento è riportato: un riepilogo dello stato dell arte delle tecniche di information retrieval, information extraction, data minig; 1 Si veda il precedente TR D3.5.1 Analisi dello stato dell arte sulle metodologie di georeferenziazione delle informazioni 2 Si veda il precedente TR D3.5.3 Analisi dello stato dell'arte sulle tecniche di modellazione dei POI e definizione di un modello di POI. Di seguito useremo anche l acronimo POI 4
275 un riepilogo dello stato dell arte delle tecniche di geographic information retrieval; metodologie utilizzate nell ambito del progetto di ricerca per la estrazione di POI da sorgenti di informazioni non-strutturate, semi-strutturate e strutturate. 5
276 2 Information processing TBD Information retrieval TBD Sistemi esistenti TBD Information extraction TBD Sistemi esistenti Negli ultimi anni sono stati proposti numerosi approcci al problema dell information extraction. In questa sezione verranno brevemente descritti alcuni tra i più importanti sistemi esistenti e confrontate le loro principali funzionalità. RAPIER. RAPIER (Robust Automated Production of Information Extraction Rules) lavora su testo semistrutturato e riesce a dedurre le regole in modo da portare a termine lo svolgimento completo della funzione di IE. Riceve un insieme di documenti e template di esempio indicanti l informazione da estrarre ed impara regole di pattern-matching per estrarre i riempitivi (filler) degli slot nel template. L intervento umano nel sistema consiste nel fornire testi con template già riempiti. L algoritmo di apprendimento incorpora tecniche provenienti da numerosi sistemi di programmazione logica induttiva e impara pattern non limitati (unbounded pattern) che includono restrizioni sulle parole e part-ofspeech tagger in prossimità del riempitivo. L algoritmo si basa su una ricerca bottom-up ossia su una ricerca dallo specifico al generale, iniziando con la regola più specifica che si accoppia con uno slot target. Delle coppie di regole sono scelte a caso e si ricerca la loro migliore generalizzazione partendo da una least general generalization (LGG) e aggiungendo restrizioni fino a quando non ci sono progressi nelle successive numerose iterazioni. I pattern di estrazione di RAPIER sono basati sull individuazione di separatori di testo e sulla descrizione del contenuto ottenuta dall utilizzo di pattern che sfruttano informazioni sintattiche e semantiche. Le prime sono conseguite utilizzando un part-of-speech tagger, mentre le seconde sono dedotte da un dizionario di classi semantiche. Il tagger analizza le frasi in input etichettando ogni parola come un nome, un verbo, un aggettivo ecc. in modo più robusto e veloce di come farebbe un full parser, ma perdendo un po in quantità 6
277 di informazioni recuperate. Le regole per l estrazione sono indicizzate secondo un nome di template e di slot e consistono di tre parti: un filler, ossia un pattern che si accoppia con il testo target e un pre-filler ed un post-filler ossia, dei pattern che si accoppiano rispettivamente con il testo precedente e seguente. Ogni pattern può essere rappresentato o da una serie di pattern item costituiti da una singola parola o da una pattern list relativa a N parole. Per avere una corrispondenza il testo in esame deve soddisfare uno dei tre possibili tipi di requisiti: appartenere ad una lista di parole, ad una lista di etichette sintattiche o ad una lista di classi semantiche. Il fatto che l algoritmo sia centrato su una frase target implica un estrazione unicamente single slot, ma è possibile eseguire un estrazione multislot dividendo il testo in più di tre campi. SoftMealy. SoftMealy è un sistema basato su automi a stati finiti non deterministici chiamati finitestate transducers (FST). Tale approccio riesce a gestire casi in cui mancano dei valori, ci sono slot con valori multipli oppure sono presenti permutazioni di variabili. Ciò è ottenuto mediante l utilizzo delle cosiddette wildcard le quali gestiscono oltre alle voci mancanti anche quelle che appaiono in ordine vario, ma incluse negli esempi di addestramento. Le regole contestuali sono ricavate utilizzando un algoritmo induttivo applicato su degli esempi che devono contenere una lista ordinata di fatti da estrarre insieme ai rispettivi separatori. L algoritmo riceve come input l insieme di fatti etichettati ritornando informazioni sulla posizione dei separatori e sulle permutazioni possibili. Queste informazioni offrono le basi per la creazione di regole contestuali che costituiscono l output del processo. Il wrapper che si ottiene è un automa a stati finiti non deterministico in cui gli stati rappresentano i fatti da estrarre e le transizioni rappresentano le regole contestuali che definiscono i separatori tra gli stessi. Le transizioni di stato sono determinate dalla corrispondenza con tali regole contestuali. L estrazione dei fatti avviene quando il wrapper riconosce i separatori nelle sue vicinanze. TSIMMIS. TSIMMIS (The Stanford-IBM Manager of Multiple Information Sources) si pone come obiettivo lo sviluppo di strumenti che facilitino la rapida integrazione di sorgenti testuali eterogenee, includendo sia le sorgenti di dati strutturati sia quelle di dati semi-strutturati. Questo obiettivo è raggiunto attraverso un architettura simile a quella di molti altri sistemi: i wrapper convertono i dati attraverso un modello comune di rappresentazione, mentre i mediator combinano ed integrano i dati ricevuti dai wrapper. I wrapper, inoltre, forniscono un linguaggio di interrogazione ed estrazione delle informazioni, mostrando un interfaccia esterna simile a quella dei mediatori. In questo modo, l utente può porre le interrogazioni attraverso un unico linguaggio sia ai mediatori (ricevendo dati integrati da più sorgenti), sia direttamente ai wrapper (interrogando un unica fonte). Ad ogni sorgente corrisponde un wrapper (o traduttore) che converte nel modello comune i dati estratti dalla sorgente. I wrapper convertono, inoltre, le query scritte utilizzando il modello comune in richieste comprensibili dalla particolare sorgente da loro servita. La peculiarità di questo progetto è il modello comune dei dati utilizzato per rappresentare le informazioni. OEM (Object Exchange Model) è un modello a etichette basato sui concetti di identità di oggetto e annidamento particolarmente adatto a descrivere dati la cui struttura non è nota o è variabile nel tempo. In aggiunta a questo, sono disponibili ed utilizzati dal sistema due linguaggi di interrogazione, OEM-QL e MSL (Mediator Specification Language), per ottenere i dati dalle fonti ed integrarli opportunamente. Per facilitare il compito dell amministratore del sistema sono 7
278 stati progettati due moduli (translator generator e mediator generator) che supportano le fasi di realizzazione, rispettivamente dei wrapper e dei mediatori, fornendo un insieme di librerie di funzioni predefinite. Ogni comando è della forma: [variabili, sorgente, pattern], dove il campo sorgente specifica l input testuale, pattern indica come trovare il testo di interesse all interno della sorgente, e variabili sono una lista di variabili che memorizzano i risultati dell estrazione. Il simbolo speciale * in un pattern significa scartare, mentre # significa salvare in una variabile. TSIMMIS fornisce due importanti operatori: Split, utilizzato per dividere la lista di input in elementi individuali; Case, che consente di gestire irregolarità nella struttura dei dati di input Minerva. Minerva è un formalismo per lo sviluppo di wrapper che combina un approccio dichiarativo grammar-based con le caratteristiche tipiche dei linguaggi di programmazione procedurali. La grammatica utilizzata da Minerva è di tipo EBNF: per ogni documento viene definito un insieme di produzioni; ogni produzione definisce la struttura di un simbolo non terminale della grammatica in termini di simboli terminali e di altri non terminali. Minerva lavora in cooperazione con un linguaggio per la ricerca e la ristrutturazione di documenti chiamato Editor, che fornisce le operazioni di base presenti negli editor testuali. Per gestire le irregolarità trovate comunemente nei dati HTML, Minerva fornisce un meccanismo procedurale per manipolare le eccezioni all interno del parser grammaticale. BYU. BYU (lavoro del Data Extraction Group presso la Brigham Young University) implementa un approccio basato su ontologie. Le ontologie sono precedentemente costruite per descrivere i dati di interesse, includendo relazioni, appartenenze lessicali, e parole chiave di contesto. Analizzando l ontologia, il tool può riconoscere vari dati presenti all interno di uno o più documenti, estrarli e successivamente produrre, automaticamente, un database contenete tali dati estratti. Prima di applicare l ontologia, il tool richiede l applicazione di una procedura automatica di estrazione di frammenti di testo contenenti le informazioni (o i record) di interesse. Per operare correttamente questo tool fa affidamento quindi alla costruzione attenta dell ontologia ed alla sua validazione. Un prerequisito, questo, che richiede uno sforzo concettuale rilevante ad opera di operatori esperti nell ambito dei domini di interesse da rappresentare all interno dell ontologia. Il lato positivo è che, se l ontologia è abbastanza rappresentativa, l estrazione è assolutamente automatica. Inoltre, BYU è discretamente robusto (ad esempio, esso continua ad operare correttamente anche se le caratteristiche di formattazione della pagina sorgente cambiano) e adattabile (ad esempio, esso lavora a partire da pagine diverse provenienti da diverse sorgenti, ma appartenenti allo stesso dominio di applicazione). Tali caratteristiche sono unicamente riconoscibili solo in tool che utilizzano un approccio basato su ontologie. Jedi. Jedi (Java based Extraction and Dissemination of Information) [21] ha funzionalità di estrazione, integrazione e riorganizzazione dei dati. Per la generazione dei wrapper utilizza le attribute grammars 8
279 valutate con una strategia di parsing fault-tolerant in grado di lavorare con grammatiche ambigue e sorgenti non regolari. Lo strato di wrapping trasforma sorgenti modellate in maniera eterogenea in un modello ad oggetti uniforme. I wrapper coinvolti sono di due tipi: generici e specifici. I wrapper generici abilitano Jedi a lavorare con sorgenti dati standard tipo HTML, XML, CORBA, ecc. I wrapper specifici possono essere utilizzati per ottenere dati da formati proprietari quali ad esempio banche dati on-line, cataloghi, bibliografie ecc. Lo strato di mediazione utilizza un semplice modello object-oriented e lavora con dati relazionali, HTML e XML. Esso permette di definire ed interrogare più sorgenti in modo da ottenere delle viste integranti in grado di omogeneizzare sia la struttura che la semantica delle stesse. Queste caratteristiche rendono Jedi un vero DAT (Data Acquisition and Transformation Tool). Inoltre, Jedi contiene un linguaggio C-like che consente agli utenti di definire i propri wrapper e mediatori. NoDoSE. NoDoSE (Northwestern Document Structure Extractor) è un tool interattivo per la determinazione e l estrazione semiautomatica di informazioni semi-strutturate. Per prima cosa è necessario definire uno schema per i dati da estrarre. Successivamente, utilizzando una GUI, l utente decompone il documento gerarchicamente, evidenziando le regioni di interesse e descrivendo la loro semantica. Il processo di decomposizione di un documento avviene in livelli. Per ogni livello di decomposizione l utente costruisce un oggetto avente una complessa struttura. Dopo aver addestrato il tool su come costruire alcuni oggetti, NoDoSE può apprendere come identificare altri oggetti nel documento. Quest ultima funzionalità è affidata ad un componente di mining che tenta di inferire la grammatica di un documento dagli oggetti costruiti dall utente. Nella sua versione corrente NoDoSE offre componenti di mining per il plain text e per pagine HTML. SRV. SRV (Sequence Rules with Validation) è un algoritmo relazionale top-down per l Information Extraction. L input è costituito da un insieme di pagine etichettate in modo da identificare le istanze dei campi da estrarre e da un insieme di caratteristiche che i token devono soddisfare. L output è un insieme di regole di estrazione. In questo sistema il problema dell Information Extraction è visto in un ottica di classificazione in cui tutte le possibili frasi di un testo sono considerate istanze. Ognuna di queste è sottoposta ad un classificatore che gli assegna una metrica indicante l attinenza della frase con il corretto filler per uno slot target. La versione originale di SRV usa un classificatore che si basa sull apprendimento di regole relazionali che adottano una tecnica di induzione top-down. Le funzioni usate in SRV sono di due tipi: semplici e relazionali. Dato un token sono innanzitutto individuate una serie di caratteristiche base quali lunghezza, tipo di carattere, ortografia, partof-speech e significato lessicale. Ma, successivamente, si va alla ricerca di caratteristiche più complesse che identificano l adiacenza tra token, ricerca questa che garantisce il carattere relazionale del sistema. Lo spazio di SRV consiste in tutti quei frammenti di testo estratti dalla collezione dei documenti d esempio che sono lunghi, in numero di token, quanto la più piccola istanza di campo nel corpo l esempio, ma non più lunghi della più larga. Il processo di estrazione coinvolge l esame di ogni possibile frammento di testo di lunghezza tale da adattarsi ad una qualsiasi delle regole. 9
280 SRV inizia esaminando l intero insieme degli esempi, positivi e negativi, dove quelli negativi sono rappresentati dai frammenti che non possono essere accettati come un istanza di campo. L induzione procede confrontando tutti gli esempi che non sono stati coperti dalle regole precedentemente acquisite. Quando una regola è abbastanza buona, ossia copre solo esempi positivi o un ulteriore specializzazione è giudicata improduttiva, tutti gli esempi positivi coperti da quella regola sono rimossi dall insieme generale e il processo è iterato. La rappresentazione delle regole di SRV è espressiva ed è capace di incorporare caratteristiche ortografiche ed altre che individuino part-of-speech o classi semantiche quando sono disponibili. Non è richiesta una precedente analisi sintattica. WebOQL. WebOQL è un linguaggio funzionale che può essere utilizzato come un linguaggio di interrogazione per il Web, per dati semistrutturati, e per la ristrutturazione di siti Web. La struttura dati principale fornita da WebOQL e l Hypertree. Gli Hypertree sono alberi etichettati sugli archi ordinati che possono essere usati per modellare una tabella relazionale, un file BibTex, una gerarchia di directory,...il livello di astrazione del modello permette di supportare comodamente collezioni, annodamenti e ordinamenti. La struttura dell albero è simile a quella del Document Object Model (DOM) nella quale gli archi sono etichettati con record contenenti tre attributi: tag, source e text, corrispondenti al nome del tag, alla porzione di codice HTML ed al testo senza markup. Il principale costrutto fornito da WebOQL è il selectfrom-where. Il linguaggio ha l abilità di simulare tutte le operazioni in algebra relazionale e calcolare la chiusura transitiva su relazioni binarie arbitrarie. WHISK. WHISK è un sistema costruito in modo da gestire qualsiasi tipo di estrazione, da testo molto strutturato a testo semistrutturato tipico dei documenti WEB, e, usato in congiunzione con un analizzatore sintattico ed un etichettatore semantico, riesce anche a gestire l estrazione di informazioni da testo libero. WHISK è basato su un algoritmo ad apprendimento e richiede un insieme di istanze di esercizio annotate a mano. Il processo di etichettatura è alternato con quello di apprendimento, infatti, ad ogni iterazione, il sistema sottopone all utente un istanza da etichettare dopodiché induce un insieme di regole basandosi sull insieme di esercizio in versione espansa. Gli oggetti di partenza sono un insieme contenente le istanze non etichettate e uno vuoto che conterrà quelle etichettate. Per istanza si intende una piccola unità di un documento come una frase. Ad ogni iterazione viene selezionato un insieme di istanze non etichettate che viene sottoposto all utente il quale aggiunge un etichetta per ogni case frame. Cosa costituisce un istanza dipende dal dominio: per il testo strutturato e semistrutturato essa è rappresentata da tag HTML o altre espressioni regolari, per il testo libero un analizzatore di frasi segmenta il testo in frasi o frammenti di frasi. Le etichette delle istanze così ottenute sono usate per la creazione di nuove regole e per testare le performance di quelle già proposte. Se una regola si applica correttamente ad una istanza si dice che questa riesce a coprirla e la frase estratta è considerata corretta. WHISK appartiene alla famiglia degli algoritmi coprenti (covering algorithm), è basato su tecniche di machine learning ed impara le regole di classificazione utilizzando l induzione topdown. Inizialmente viene trovata la regola più generale che copre il testo di partenza, successivamente si aggiunge un termine per volta alla regola fino a quando gli errori sono ridotti a zero o un criterio di presnellimento (pre-pruning) è soddisfatto. Il processo di apprendimento è ripetuto fino a quando tutte le 10
281 estrazioni positive sono coperte dalle regole generate. A questo punto si applica un processo di postsnellimento (post-pruning) in modo da rimuovere le regole che sovradattano (overfit) i dati. Riassumendo, WHISK è in grado di gestire testo strutturato e semistrutturato, associa informazioni correlate tra loro in case frame multi-slot, opera su istanze che rappresentano tipicamente frasi o unità della stessa taglia, gestisce le permutazioni variabili degli slot nel caso in cui queste siano appartenenti agli esempi, ma è incapace di rappresentare caratteristiche negate. Wien. WIEN (Wrapper Induction ENvironment), tramite un approccio di tipo plain-text, analizza pagine HTML che hanno organizzazione di tipo HLRT (Head, Left, Right, Tail), in cui è possibile riconoscere gli elementi che servono a delimitare la testa (Head) e la coda (Tail) della zona di interesse. Al loro interno possono essere riconosciute coppie di elementi, Left e Right, che separano gli slot contenenti i fatti da estrarre. Quasi tutti gli attributi che caratterizzano le pagine vengono tralasciati. Le pagine che soddisfano queste caratteristiche rappresentano quasi sempre risultati automatici frutto di interrogazioni ad indici di ricerca o database. WIEN tenta di automatizzare il più possibile il wrapping in modo da evitare il compito di etichettare a mano un insieme di documenti di esempio. In proposito, sono state sviluppate una serie di tecniche che automaticamente si preoccupano di tale fase. L algoritmo di etichettatura automatica prende in input delle euristiche specifiche del dominio e le utilizza al fine di riconoscere le istanze degli attributi che si vogliono estrarre in modo da etichettarle. Stalker. Stalker offre un linguaggio di estrazione più espressivo lasciando spazio alla disgiunzione e i multi-pattern. L utente fornisce esempi in cui sono evidenziati i dati rilevanti che costituiscono le foglie del cosiddetto albero EC (Embedded Catalog): una descrizione della pagina secondo una struttura ad albero in cui ogni nodo interno è sia una lista omogenea che una tupla eterogenea di voci. A partire dalla pagina di esempio sono generati la sequenza dei token che rappresentano il contenuto della pagina (parole, etichette HTML) e gli indici dei token rappresentanti l inizio delle voci. La sequenza dei token e delle wildcard è usata come punto di riferimento per localizzare una voce da essere estratta dall algoritmo di induzione wrapper che genera regole di estrazione espresse come semplici grammatiche a riferimento ( landmarkgrammar ). I documenti Web sono descritti utilizzando il formalismo EC in cui il contenuto di ogni nodo radice è l intera sequenza di token (ossia l intero documento), mentre il contenuto di un nodo qualsiasi rappresenta una sottosequenza del contenuto del suo genitore. I nodi finali sono le voci di interesse dell utente, ossia i dati da essere estratti. Stalker usa un algoritmo a copertura sequenziale che genera un automa a riferimento lineare (linear landmark automata) in grado di creare il maggior numero possibile di esempi di addestramento. L automa in questione è a stati finiti e non deterministico e una transizione tra stati avviene allorquando la stringa al momento sotto esame è accettata come valida in quanto soddisfa la regola che permette la transizione dallo stato corrente a quello successivo. In seguito Stalker cerca di generare un nuovo automa per gli esempi rimanenti e il processo viene iterato. Quando tutti gli esempi positivi sono coperti, Stalker ritorna la soluzione ossia una SLG (Simple Landmark Grammar) dove ogni ramo corrisponde ad un landmark automata. Stalker riesce ad effettuare wrapping da sorgenti di informazione 11
282 aventi un numero di livelli arbitrario. Ogni nodo è estratto indipendentemente dal suo sibling, quindi l ordinamento delle voci nel documento non deve essere necessariamente fissato ed è possibile estrarre informazioni da documenti con voci mancanti o che appaiono in vario ordine. L algoritmo usa regole single slot, ma questo non rappresenta una limitazione in quanto usando un EC-tree riesce a raggruppare voci individuali estratte però da template multi slot. Lixto. Lixto è uno strumento che permette agli utenti di costruire interattivamente e visualmente un wrapper. Il processo si svolge mediante l utilizzo di uno o pochi documenti d esempio usando principalmente i mouse click e un design fortemente intuitivo. Durante il processo visuale il programma wrapper è generato automaticamente e non richiede l intervento da parte di persone con conoscenze del linguaggio di programmazione del wrapper. Lixto presenta un insieme di caratteristiche uniche: utilizza un processo di specifica del wrapper visuale; permette l estrazione di pattern target basata sul contesto, sul contenuto stesso, sugli attributi HTML, sull ordine di comparsa e su concetti semantici e sintattici; la struttura delle specifiche visuali utilizza un linguaggio interno basato sulla logica, simile al Monadic Datalog e denominato Elog che è in grado, con la sua struttura più interna, di catturare precisamente ed efficientemente l espressività della monadic second order logic (MSO) applicata agli alberi. L architettura del Lixto Visual Wrapper Toolkit è suddivisa in moduli. L Interactive Pattern Builder fornisce un interfaccia utente visuale che permette all utente di specificare i pattern di estrazione desiderati e contiene l algoritmo di base per creare un corrispondente Elog wrapper di output. L Extractor è l interprete del programma Elog che esegue l estrazione sul documento HTML generando come output una pattern instance base ossia una struttura dati che codifica le istanze estratte come alberi gerarchicamente ordinati e stringhe. Un solo programma Elog può essere usato sia per effettuare del wrap continuamente su pagine che cambiano o su diverse pagine accomunate da una struttura simile. Con l XML Designer l utente decide come mappare l informazione estratta, conservata nelle pattern instance base, in XML. Compito questo svolto materialmente dal cosiddetto XML Transformer. Il sistema fin qui descritto è stato utilizzato per lo sviluppo di numerose applicazioni nel mondo reale in cui l obiettivo di integrare, trasformare e consegnare l informazione estratta usando il Lixto Visual Wrapper è stato perseguito mediante l utilizzo del Lixto Transformation Server. Esso può essere considerato come un ambiente simile ad un contenitore di agenti di informazione configurati visualmente, può gestire flussi unidirezionali molto complessi di informazioni, è disegnato per l uso di componenti in modo da modulare la gestione dell informazione ed inoltre garantisce che i servizi di informazione siano controllati e personalizzati dall esterno dell ambiente server utilizzando vari tipi di mezzi di comunicazione (HTTP, SMS, RMI). DEByE. Per l estrazione di dati da sorgenti provenienti dal web DEByE (Data Extraction By Example) utilizza un approccio basato su un piccolo insieme di esempi specificati dall utente. La novità sta nel fatto che l intero processo di estrazione è pienamente specificato da esempi proposti dall utente poi utilizzati per generare i pattern. L utente parte scegliendo un tipo di struttura ed essa è descritta all atto della specifica degli esempi. L utente interagisce con un interfaccia grafica basata sul concetto di tabelle annidate (nested tables) che, grazie alla loro semplicità e intuitivit`a, lo mettono al riparo dal doversi addentrare in dettagli tecnici (come tag HTML e operatori di formattazione) legati alla problematica dell estrazione. L approccio utilizzato permette all utente di esprimere la sua percezione degli oggetti nelle pagine di interesse e questo 12
283 evita che sia il tool a derivarla dalla formattazione del testo. L estrazione utilizza il modulo DEByE extractor che adotta una procedura bottom-up abbastanza efficiente anche se applicata a documenti Web diversi tra loro, come dimostrato dagli esperimenti condotti. Altri moduli sono in via di realizzazione per essere usati insieme a DEByE. Tra questi, QSByE: una interfaccia per query QBE-like, ASByE: un tool per la generazione di agenti di acquisizione di dati, DEByE-SM: un modulo per memorizzare i dati estratti in database relazionali, WebView: un tool per definire e mantenere viste su sorgenti web. HιLεX. HιLεX è un sistema logic-based che combina la conoscenza sintattica e quella semantica per estrarre informazioni da documenti non strutturati. Le principali caratteristiche di HιLεX sono le seguenti: Una nuova rappresentazione bidimensionale per i documenti non strutturati. Un documento viene visto come un piano Cartesiano composto da un insieme di regioni rettangolari annidate denominate portion. Ogni portion, identificata univocamente attraverso le coordinate cartesiane di due vertici opposti, contiene una parte del documento di input; L utilizzo di un linguaggio per la rappresentazione della conoscenza ASP-based chiamato OntoDLP, che estende la programmazione logica disgiuntiva con delle caratteristiche proprie della programmazione ad oggetti come classi, ereditarietà (multipla) e tipi. Questo linguaggio è supportato dal sistema DLV; L utilizzo di un ontologia, codificata in OntoDLP, che descrive il dominio del documento di input. Un concetto del dominio è rappresentato come una classe OntoDLP; ogni istanza di classe è un pattern rappresentante un possibile modo di scrivere il concetto; L impiego di una nuova grammatica (HιLεX grammar) per la specificazione dei pattern. La grammatica estende le espressioni regolari per la rappresentazione di pattern bidimensionali (come tabelle, item list, etc.), che appaiono frequentemente nelle pagine Web. I pattern sono specificati attraverso regole OntoDLP sulla cui esecuzione si basa l estrazione semantica di informazioni mediante l associazione di ogni portion ad un elemento dell ontologia di dominio. HιLεX consente di estrarre informazioni da documenti di formati differenti grazie all alto livello di astrazione fornito dalla vista logica del documento, e permette di effettuare una classificazione semantica dei documenti utile in svariati contesti applicativi 2.3. Data mining TBD Sistemi esistenti 1. Data Science Toolkit, includes geo, text, NLP, and sentiment analysis tools; 2. Datumbox, a free API and many functions for Sentiment Analysis, Language Detection, Topic Classification and easily building intelligent apps; 13
284 3. FreeLing, open source language analysis tool suite, GNU GPL.; 4. GATE, a leading open-source toolkit for Text Mining, with a free open source framework (or SDK) and graphical development environment; 5. Grammarcheck.net, free online grammar check, for English. 6. IKANOW Infinit.e open source Community Edition, a scalable framework for collecting, storing, processing, retrieving, analyzing, and visualizing unstructured documents and structured records. 7. INTEXT, MS-DOS version of TextQuest, in public domain since Jan 2, LingPipe, is a suite of Java libraries for the linguistic analysis of human language. 9. Open Calais, an open-source toolkit for including semantic functionality within your blog, content management system, website or application. 10. RapidMiner Text Mining, ReVerb: Open Information Extraction Software, binary relationships like high-in(winter squash, vitamin c) without requiring any relation-specific training data. 12. S-EM (Spy-EM), a text classification system that learns from positive and unlabeled examples. 13. The Semantic Indexing Project, offering open source tools, including Semantic Engine - a standalone indexer/search application. 3 Geographic information retrieval Negli ultimi anni, con l evoluzione di nuove tecnologie, si è avuto un notevole aumento della disponibilità di banche dati contenenti informazioni digitali georeferenziate (informazioni con associata una posizione sulla superficie terrestre). Questa tipologia di informazione, che precedentemente si limitava alle tradizionali forme di stampa (ad esempio mappe e atlanti), oggi include i dati di telerilevamento, le immagini da satelliti e aerei, le immagini provenienti da fotocamere digitali su autovetture (ad esempio street view), le banche dati di misurazioni di dati ambientali associati a specifiche aree geografiche (ad esempio temperatura, velocità del vento, salinità, altezza della neve), etc. Inoltre la disponibilità di informazioni vettoriali complesse, come mappe topografiche e carte tecniche, accessibili on line e la disponibilità di sistemi di georeferenziazione a basso costo (sia attraverso sistemi hardware quali GPS che attraverso sistemi software quali geocoding) ha consentito la messa on-line di enormi quantità di informazioni digitali georeferenziate. L accesso a queste informazioni avviene ancora oggi attraverso criteri standard (ovvero con indici basati su tematiche predefinite) mentre l accesso su base geografica si sta sviluppando solo recentemente grazie 14
285 principalmente alla evoluzione dei motori di ricerca e allo sviluppo dei servizi di web mapping che consentono la navigazione geografica su web (ad esempio Google Maps 3 ). Wikipedia definisce geographic information retrieval (GIR) i sistemi e le metodologie che aggiungono metadati geografici [1] a quanto ottenuto da sistemi e metodologie di information retrieval. Nel technical report TR D3.5.1 Analisi dello stato dell arte sulle metodologie di georeferenziazione delle informazioni sono state descritte le tecnologie utilizzate per individuare in maniera universale e con precisione una posizione geografica sulla superficie della Terra in un dato sistema di riferimento geografico. In particolare sono state analizzate le metodologie e tecnologie di: Geocoding. Associa coordinate geografiche ad altri dati geografici, come indirizzi stradali, codici di avviamento postale o toponimi; Reverse geocoding. A fronte di una coppia di coordinate espresse in un determinato sistema di riferimento fornisce l indicazione dell indirizzo toponomastico(via, numero civico, CAP, etc.); Geotagging. Aggiunge informazioni riguardanti la posizione geografica ad un media digitale; Geoparsing. Assegna marker geografici (ad esempio un indirizzo, un CAP o coordinate geografiche espresse in un dato sistema di riferimento) a singole parole o frasi in un testo libero ovvero a dati non-strutturati. Servizi di Gazetteer. Dato un nome di un luogo, ne restituisce la localizzazione geografica. In questo paragrafo sarà brevemente descritto, in maniera unitaria, lo stato dell arte della geographic information retrieval Query geografiche e spaziali I termini di query geografica e query spaziale sottintendono interrogazioni di banche dati che sono organizzate anche spazialmente sulla base di particolari relazioni tra le entità in esse presenti nel contesto di un sistema di riferimento. Il termine più generale è query spaziale (spatial query), anche se nella lingua italiana può apparire sviante, e può essere definito come query sulle relazioni spaziali (intersezione, contenimento, confine, di adiacenza, di prossimità) di entità geometricamente definite e posizionate in uno spazio indipendentemente dalla natura del sistema di coordinate utilizzato. Viceversa, il termine query geografica assume che lo spazio sia necessariamente uno spazio fisico delineato da sistemi di coordinate ben definiti che descrivono il mondo reale. Nel seguito del paragrafo l'enfasi sarà posta sulle query geografiche, anche i modelli descritti si possono applicare anche ad un database spaziale general purpose, oltre che, naturalmente, ad un sistema informativo geografico. Appare opportuno precisare che, in generale, le caratteristiche dei dati geografici richiedono metodi di accesso e strutture di dati verticale e particolari, ma non è compito di questo report analizzare i metodi di accesso e le strutture dati geografici (la letteratura su questi argomenti è vastissima), bensì ci si concentrerà su una classificazione di base dei tipi di query geografica. 3 Si veda 15
286 Le relazioni spaziali tra entità geografiche possono essere classificate in vari modi. Una distinzione è quella tra le relazioni che sono indipendenti dall orientamento, dette relazioni topologiche, e quelle che ne dipendono, dette relazioni geografiche. In generale, le relazioni geografiche, nei sistemi di coordinate che descrivono il mondo reale, sono relazioni geometriche. In un contesto geometrico, in cui la distanza e la direzione possono essere misurate su una scala continua, i principi della geometria sono lo strumento idoneo per calcolare la maggior parte delle relazioni tra gli oggetti che si trovano all'interno di questo contesto. Ad esempio, date le coordinate geografiche in WSG84 di Napoli (Mercato , ) e Roma (Piazza Campidoglio , ), è abbastanza semplice calcolare, utilizzando formule geometriche, la distanza tra le due località, oppure, utilizzando semplicemente le sole coordinate, è possibile individuare altre relazioni tra le due località, ad esempio Roma è a Nord di Napoli (è definita una direzione). Le relazioni geografiche includono le seguenti relazioni tra entità: di fronte a; dall altra parte di; sopra; sotto; descrizioni metriche di angoli azimutali: a nord; a sud; a est; a ovest; e loro combinazioni. Si hanno inoltre le relazioni che descrivono la distanza tra entità geografiche sia in termini metrici quantitativi (misura della distanza) che in termini qualitativi, mediante termini quali: vicino; lontano; in prossimità di Le relazioni spaziali possono essere sia geometriche che topologiche (ovvero spazialmente correlate ma senza che sia precisata una distanza misurabile o una direzione assoluta). Le relazioni topologiche tra entità geografiche sono del tipo: equivalenza (si sovrappone completamente); equivalenza parziale (si sovrappone parzialmente, attraversa); contenimento (è interna); adiacenza (è connessa o incontra); separatezza (è disgiunta). 16
287 Nella figura di lato si hanno le relazioni: b è interno a c a è connesso a c d è disgiunto da a f è sovrapposto a e Figura 1: Relazioni topologiche Le indicazioni topologiche possono non avere alcuna particolare relazione con un sistema di coordinate geografiche. Ad esempio destra e sinistra sono indicazioni valide solo in relazione al sistema di riferimento di un osservatore e non hanno alcun rapporto assoluto con Nord o Ovest. Le query spaziali e geografiche combinano entrambi gli elementi geometrici e topologici. E possibile distinguere due categorie principali di query che soddisfano i requisiti di conoscenza imposti da un generico utente: la query Cosa c'è qui. Risponde al requisito di conoscere quali informazioni sono disponibili in una determinata località (geograficamente individuata); la query Dov'è questo. Risponde al requisito di conoscere di conoscere in quale località (geograficamente individuata) si verifica un dato evento o fenomeno. All'interno di questa semplice classificazione delle query spaziali e geografiche, ci sono diversi tipi di query, che si distinguono per come sono geograficamente definite le località di interesse Tipologie di query geografiche Le tipologie di query geografiche che un utente può eseguire verso le banche dati digitali possono essere complesse ed arbitrarie nella definizione del tipo di informazioni desiderate, limitazione delle aree geografiche, periodo di tempo, etc. Tuttavia, limitandosi esclusivamente agli aspetti spaziali o geografici della query, possiamo distingue cinque diverse tipologie di query a seconda del tipo di informazioni fornite dall utente: 1. Punto; 2. Linea; 17
288 3. Poligono; 4. Buffer; 5. Multicriterio. Le prima tipologia di query è probabilmente la più semplice da analizzare e descrivere ed è illustrata nella figura che segue: Figura 2: Query spaziale Punto La query Punto risponde alla domanda Cosa si trova nel punto di coordinate X, Y nel sistema di riferimento utilizzato. Questa query, ad esempio, nel caso di POI, dovrebbe restituire i POI che sono presenti in un particolare punto della superficie terrestre. Più in generale restituisce un qualsiasi oggetto georeferenziato che si riferisce ad un particolare punto sulla superficie terrestre. La query Linea è legata alla presenza di una rete nei dati spaziali o geografici. Una rete può essere considerata come un insieme di segmenti (ogni segmento è definito da due punti) tra loro interconessi (il punto di terminazione di un segmento è il punto di inizio del segmento successivo), che rappresentano strade, linee elettriche, oleodotti, etc. Figura 3: Query spaziale Linea Le query Linea rispondono alla domanda Cosi si trova lungo questo percorso, ma anche a domande più complicate, che richiedono la conoscenza di altre informazioni come ad esempio Quale e il percorso più breve da questo punto a questo punto della linea. In questo caso se si vuole conoscere, ad esempio, il 18
289 percorso più breve tra Napoli e Roma è necessario conoscere anche i sensi di percorrenza, i flussi di traffico, i limiti di velocità, etc. e la query diventa una più complessa query multicriterio. La query Poligono è illustrata nella figura successiva: Figura 4: Query spaziale Poligono Questa query risponde alla domanda Cosa possiamo trovare all interno di una particolare regione sulla superficie terrestre (ovvero poligono definito come Linea in cui il punto iniziale e quello finale coincidono). E evidente che il concetto di interno ad una regione non deve essere necessariamente preciso, ma può essere interpretato diversamente utilizzando i concetti di massima o minima area di sovrapposizione affinché un oggetto sia considerato interno ad una regione. La query buffer è illustrata nella figura successiva: Figura 5: Query spaziale Buffer Questa query risponde alla domanda Cosa possiamo trovare entro una data distanza da un punto, linea o poligono. Ovviamente i processi coinvolti sono necessariamente differenti a seconda che si tratti di punto,linea o poligono. Esempi della query possono essere quali POI che si trovano ad una data distanza da un monumento (inteso come punto) oppure ad una data distanza da una strada Infine le query multicriterio combinano ricerche complesse su molteplici sorgenti di informazioni e possono includere anche informazioni non georeferenziate. Ad esempio ricercare i POI che rappresentano ristoranti di Napoli su che si trovano nelle vicinanze di determinata via (query buffer), che accettano prenotazioni e che hanno una cucina specifica per celiaci. Teoricamente i sistemi di geographic information retrieval dovrebbero essere in grado di gestire query multicriterio come sopra definite e dunque combinare le diverse tipologie di query spaziali con informazioni non spaziali alle quali sono associate componenti geografiche 4 ovvero informazioni georeferenziate. 4 Si veda quanto riportato nel technical report TR D3.5.1 Analisi dello stato dell arte sulle metodologie di georeferenziazione delle informazioni 19
290 3.3. Navigazione geografica Effettuare ricerche in una banca dati geografico indicizzato è un'attività che implica una buona conoscenza di ciò che si sta cercando e che si è in grado di esplicitare questa conoscenza con un qualche formalismo. La maggior parte delle query utilizzate come esempi nella analisi sopra riportata riflettono esattamente questa condizione. Tuttavia è possibile immaginare ricerche molto meno dirette e specializzate che implicano che gli utenti hanno una qualche nozione del tipo di informazioni volute ma non sono in grado di esplicitare e specificare le loro necessità utilizzando un qualsiasi formalismo (ad esempio un linguaggio di interrogazione). Ciò che è necessario in questi casi è la possibilità di navigare geograficamente la banca dati senza richiedere la formulazione di una esplicita query. Questa navigazione geografica combina query geografiche hoc le mappe geografiche interattive di mappe per consentire all'utente di esplorare la dimensione geografica delle informazioni presenti nella banca dati. La ricerca di informazioni con associate componenti geografiche utilizzando come strumento la navigazione su mappe interattive oggi è una metodologia ampiamente utilizzata dagli utenti grazie allo sviluppo delle tecnologie di web mapping sia su personal computer che su device mobile (ad esempio smartphone). Questa metodologia di ricerca di informazioni ha un riscontro importante nella ricerca di POI laddove è possibile integrare il singolo POI con il contesto geografico circostante e con le informazioni a loro volta associate al contesto geografico. I vantaggi della navigazione geografica su web come strumento di geographic information retrieval sono evidenti: potenzialità della navigazione su web e dunque possibilità di strutture tutte le caratteristiche di internet; semplicità ed intuitività (gli utenti devono avere solo qualche nozione elementare di geografia); nessuna necessità di utilizzare strumenti tecnologici specifici in quanto è sufficiente il solo browser Indicizzazione geografica e spaziale Una delle principali sorgenti di informazioni nelle banche dati digitali sono gli elementi testuali (ovvero il testo) in una varietà di forme e proveniente da una molteplicità di fonti. Questi elementi possono includere documenti full-text come enciclopedie, articoli, libri, relazioni, leggi, normative, etc. Molti di questi documenti descrivono, discutono, o si riferiscono a particolari luoghi o regioni e la localizzazione geografica è spesso un importante, se non il principale criterio per la ricerca di informazioni nelle banche dati digitali. Nelle metodologie tradizionali di catalogazione, i riferimenti geografici sono una forma comune di accesso ai documenti (soprattutto libri e mappe) e questi riferimenti sono solitamente assegnati manualmente in base alle valutazioni del catalogatore che stabilisce se questi siano importanti o meno per l'accesso al documento. In linea di principio questa attività manuale potrebbe essere fatta per ogni singolo documento o parte di documento presente in una banca dati digitale, ma i costi, in questo caso sarebbero proibitivi. Appare evidente la necessità di utilizzare strumenti in grado di eseguire automaticamente la georeferenziazione dei documenti di testo ovvero indicizzare automaticamente un documento in base agli elementi geografici in esso presenti. In questa maniera le operazioni di information retrieval su base 20
291 geografica possono essere di fatto trattate in maniera analoga alle usuali operazioni di ricerca di informazioni in un documento testuale. Come già riportato, si rimanda al technical report TR D3.5.1 Analisi dello stato dell arte sulle metodologie di georeferenziazione delle informazioni per la descrizione delle metodologie e tecnologie per georeferneziare informazioni. E inoltre opportuno osservare che la georeferenziazione dei documenti nelle banche dati digitali, ove viene realizzata, è effettuata in maniera ambigua utilizzando la toponomastica piuttosto che elementi di georeferenziazione standard e non ambigui quali le coordinate geografiche in sistemi di riferimento standard. Questo porta ad una serie di problemi quali: 1. la toponomastica non è univoca e senza qualificatori aggiuntivi moltissimi nomi di luogo sono ambigui (San Lorenzo quartiere di Roma o quartiere di Napoli); 2. molti nomi di luoghi non sono definiti universalmente e in maniera standard e spesso esistono sinonimi ; 3. il luogo a cui la toponomastica fa riferimento cambia dimensione, forma e anche nome nel corso del tempo. Ad esempio i cambiamenti politici nel mondo sono assai più veloci di quanto non lo siano i cambiamenti geologici. Frontiere, limiti amministrativi, nazioni e nomi delle regioni (o anche l'esistenza meno di entità politiche) possono cambiare in qualsiasi momento; 4. l ortografia varia. Il nome di un luogo espresso nella lingua (o dialetto) locale può cambiare nel tempo e comunque non essere univoco nelle varie lingue. Viceversa l utilizzo di coordinate geografiche consente di individuare i luoghi in maniera univoca e precisa con i seguenti vantaggi: 1. la localizzazione è persistente e non varia nel tempo indipendentemente dal nome, dalle condizioni politiche, etc.; 2. le informazioni possono essere gestite in maniera semplice dai sistemi informativi geografici; 3. le informazioni possono essere trattate in maniera diretta e coerente dalle applicazioni di geographic information retrieval, consentendo l utilizzo di tutte le tipologie di query geografiche e spaziali sopra discusse Metodologia per geographic information retrieval Nel paragrafo precedente è stato evidenziato come l indicizzazione geografica e spaziale di un documento utilizzando coordinate geografiche in un dato sistema di riferimento, risolve in maniera diretta le problematiche legate alla ricerca delle informazioni geografiche in esso contenute. Quasi tutte le tecnologie ed applicazioni di information retrieval diffuse nel mercato consumer utilizzano questa metodologia. Tuttavia la maggior parte dei documenti presenti nelle banche dati digitali non sono indicizzati in questa maniera e dunque non soddisfano questo presupposto. In questo ultimo caso la metodologia che può essere utilizzata prevede i seguenti passi: 1. identificazione dei nomi di località e dei costrutti geografici. Questo passo tenta di individuare tutte le parole o frasi che abbiano un significativo contenuto geografico. Le metodologie utilizzate sono 21
292 quelle già citate di geoparsing e dunque si basano sull utilizzo dei gazetteer per individuare i nomi dei luoghi e parser in grado di individuare costrutti lessicali che contengono informazioni spaziali o topologiche, come adiacente al lago, a sud del fiume, tra il fiume e la strada, etc. I risultati del processo sono passati al passo successivo. 2. georeferenziazione delle informazioni. Questo passo consiste nella georeferenziazione di quanto ricavato nel passo precedente utilizzando le tecniche di geocoding. Nel caso di oggetti che hanno una estensione geografica in genere si attribuiscono all oggetto le coordinate del suo baricentro (esempio città, vie, piazze o comunque una generica località) fermo restando che l oggetto può poi essere spazialmente descritto in maniera precisa assegnandogli la corretta geometra (linea, multilinea, poligono, etc.). E evidente che il processo affronta problematiche complesse legate all ambiguità ed incompletezza di quanto rilevato. Ad oggi le tecniche utilizzate appaiono ancora poco mature e sono strettamente correlate alla tecniche di information retrieval classico. In generale si tenta di risolvere l incompletezza delle informazioni assegnando ai termini individuati un peso probabilistico. Ad esempio se si è individuato il termine quartiere di San Lorenzo e nel testo si parla principalmente della città di Napoli (ovvero si è costruita una relazione con la città di Napoli) si ipotizza che si tratti dl quartiere di San Lorenzo a Napoli. La risoluzione delle ambiguità rimane, ad oggi, ad un livello empirico. Infatti è evidente che i concetti di adiacente al monumento, adiacente alla piazza, adiacente al lago sottintendono una distanza diversa dall oggetto di riferimento e, nel caso di piazza e lago, richiedono anche la specifica di una direzione (verso nord, verso sud, etc.), cosa probabilmente non necessaria nel caso del monumento. In questi casi si potrebbe assegnare una distanza proporzionale alla dimensione dell oggetto di riferimento, incrementando notevolmente le difficoltà di una corretta georeferenziazione Sistemi esistenti Allo stato attuale non esistono sistemi software di mercato per la ricerca ed estrazione di informazioni a cui sono associate componenti geografiche generiche 5. I sistemi disponibili sono dedicati alla gestione, in senso lato, del dato geografico (geographic information system) oppure alla gestione del gazetteer (gazetteer management software). Nel seguito del paragrafo sono brevemente descritti i sistemi software esistenti per queste due categorie Geographic information system Un Geographic Information System (GIS) è un sistema progettato per ricevere, immagazzinare, elaborare, analizzare, gestire e rappresentare tutti i tipi di dato spaziale o geografico. I GIS gestiscono sia il dato geografico puro che i suoi attributi alfanumerici. I dati geografici riguardano direttamente la configurazione dei luoghi e permettono di realizzare un modello rappresentativo (bidimensionale o tridimensionale) della realtà. Essi possono essere di diversa 5 Ovvero informazioni che non siano già state esplicitamente georeferenziate utilizzando sistemi di coordinate geografiche e dunque indicizzate in maniera univoca dal punto di vista geografico 22
293 provenienza, ottenuti già in formato digitale (file di cartografia numerica, immagini telerilevate, dati GPS, etc.) oppure prodotti attraverso la digitalizzazione di documenti analogici. I dati geografici sono strutturati secondo gli schemi della cartografia numerica, ovvero in formato raster 6 o in formato vettoriale 7 e sono formalmente descritti attraverso metadati. La Direttiva INSPIRE (2007/2/EC) descrive gli elementi minimi che devono essere presenti in ogni set di metadati relativo ai dati geografici. In Italia, l Agenzia per l Italia Digitale ha recepito le norme tecniche di INSPIRE realizzando il Repertorio Nazionale dei Dati Territoriali (RNDT). Tra i software GIS open source si possono citare: 14. GRASS GIS (si veda Quantum GIS (si veda gvsig (si veda Kosmo (si veda OpenJUMP (si veda Orfeo toolbox (si veda Mapguide (si veda udig (si veda SAGA GIS (si veda Tra i software GIS proprietari si possono citare: 1. ArcGIS (si veda 2. Geomedia (si veda 3. MapINFO (si veda 4. AutoCAD MAP (si veda 5. GISMaker (si veda Gazetteer Management Software Secondo lo standard ISO19112 (anche norma nazionale UNI-EN-ISO19112:2005) un Gazetteer è una raccolta di identificativi geografici. Nel technical report TR D3.5.1 Analisi dello stato dell arte sulle metodologie di georeferenziazione delle informazioni, sono stati descritti i servizi di Gazetteer e di ricerca Toponimi. I software per la gestione dei Gazetteer sono estremamente specialistici ed utilizzati, ad oggi, in ambiti molto ristretti. Si possono citare: 1. Civica GIS. Dedicato principalmente alla gestione degli identificativi geografici del Regno Unito (si veda 6 Si veda 7 Si veda 23
294 2. Symphony imanage. Dedicato principalmente alla gestione degli identificativi geografici del Regno Unito (si veda 3. GGP NGz (si veda 4. CadCorp. CadCorp ha sviluppato un sistema per la gestione del National Street Gazetteer, un database di tutte le strade dell Inghilterra e del Galles (si veda 24
295 4 Estrazione di POI In questo paragrafo sono descritte le metodologie utilizzate nel progetto di ricerca per la estrazione di POI da banche dati semi-strutturate, strutturate o non-strutturate. Preliminarmente appare opportuno ricordare, come descritto ed analizzato in dettaglio nel technical report TR D3.5.3 Analisi dello stato dell'arte sulle tecniche di modellazione dei POI e definizione di un modello di POI, che un POI è un luogo in uno spazio fisico per il quale sono disponibili informazioni ovvero un POI associa informazioni ad una posizione geografica sulla superficie terrestre. Le informazioni di interesse per il progetto di ricerca configurano un modello di POI definito descritto dalle entità riportate nel technical report citato (nome, categoria, descrizione, geometria, contatti, sito web, etc.). L estrazione di POI è confinata nei limiti del modello di POI definito e prevede quindi la ricerca di precise informazioni da associare ad una posizione geografica. Questa condizione al contorno limita e in parte semplifica le modalità di ricerca ed estrazione dei POI da banche dati ed implica che le metodologie utilizzate hanno come assioma che è definito l ambito della ricerca ovvero sono definite: le categorie di oggetti da ricercare (ad esempio ristoranti, alberghi, chiese, etc.); le informazioni associate agli oggetti (ad esempio nome, descrizione, posizione, etc.); l ambito geografico della ricerca (ad esempio tutte le vie del Comune di Napoli, oppure alcune vie del Comune di Napoli, oppure tutti i Comuni della Provincia di Napoli, etc.). La metodologia impiegata per estrazione di POI da banche dati semi-strutturate, strutturate o nonstrutturate e loro normalizzazione nel modello di POI definito, riprende le tecniche utilizzate nei processi di Extract, Transform e Load (ETL) per estrarre informazioni da sorgenti eterogenee e ricondurle a modelli predefiniti. Le informazioni sono estratte dalle banche dati (sorgente), sono sottoposte a un processo di trasformazione che normalizza i dati e sono quindi caricate nelle banche dati che riprendono il modello di POI definito. I tre processi: 1. estrazione; 2. trasformazione; 3. caricamento; sono concettualmente comuni alle diverse tipologie di banche dati (semi-strutturate, strutturate o nonstrutturate), ma le tecniche utilizzate per realizzarli possono essere differenti. 25
296 Dati Normalizzati Banche Dati Dati Grezzi Transform File Extract Dati Definitivi Load Figura 6: Schema ETL 4.1. Estrazione Il processo di estrazione è stato, a sua volta, suddiviso in tre passi: 1. pre-elaborazione della sorgente; 2. estrazione vera e propria delle informazioni; 3. creazione formato intermedio. 26
297 4.1.1.Pre-elaborazione della sorgente Questo passo ha una valenza meramente tecnica e consiste nella predisposizione della sorgente per riportala ad un formato accessibile dal passo successivo. Sono state analizzate e progettate soluzioni specifiche differenti a seconda della tipologia di banche dati Banche dati non-strutturate TBD Banche dati semi--strutturate Nel caso particolare di sorgenti web è necessaria la disponibilità locale di tutte pagine HTML di interesse in quanto sarebbe oneroso ed inutile accedere via internet alle singole pagine selezionando di volta in volta quella che contiene le informazioni da estrarre. In questo specifico caso, a seguito delle analisi effettuate, sono stati progettati e realizzati modelli standard per effettuare il download sui sistemi locali delle pagine HTML di interesse. I modelli sono dati in input ad un motore di download che automaticamente trasferisce localmente (esegue il download) le pagine HTML individuate scartando tutte le altre. I modelli consentono di: indicare esplicitamente una o più pagine HTML di cui si vuole eseguire il download; nel caso di sorgenti web paginate ovvero liste di informazioni su più pagine HTML (come ad esempio i risultati di una ricerca): 1. eseguire automaticamente il download di tutte e sole le pagine della lista; 2. eseguire automaticamente il download di tutte e sole le pagine di dettaglio a partire dalle singole entry di tutte le pagine della lista. Il passo sopra descritto consente, una volta valorizzato un modello, di avere localmente le pagine HTML di interesse pronte per essere date in input al passo successivo. Ad esempio nel caso in cui si utilizzi come sorgente web la Guida Michelin per gli hotel di Napoli, il processo esegue il download automatico di 450 pagine HTML (una pagina per ogni hotel), oppure nel caso in cui si utilizzi come sorgente web 2Spaghi.it per i ristoranti di Napoli, il processo esegue il download automatico di 820 pagine HTML (una pagina per ogni ristorante) Banche dati strutturate Nel caso di data base relazionali sono stati progettati connettori che scaricano localmente i dati di interesse (esempio connettore per OpenStreetMap) Estrazione vera e propria delle informazioni Questo passo consiste nella estrazione vera e propria dei POI a partire dai documenti predisposti nel passo precedente Banche dati non-strutturate TBD. 27
298 Banche dati semi--strutturate Il passo utilizza le tecniche di web scraping e HTML parser e riceve in input le pagine HTLM da esaminare e template predefiniti con le indicazioni dei marker (esempio tag HTML) che sono utilizzati per individuare i token (singola parola o insieme di parole) di informazione da estrarre ed a cui associare la corrispondente entità dei POI (nome, categoria, descrizione, etc.) Banche dati strutturate Nel caso di data base relazionali il processo è semplice e stabilisce le corrispondenza tra le entità presenti nella sorgente di origine e le entità dei POI nel modello predefinito Creazione formato intermedio Le informazioni estratte nel passo precedente sono elaborate in un formato intermedio con codifica ASCII. Il formato intermedio è unico per tutte le tre tipologie di banche dati Trasformazione Il processo di trasformazione riceve in input le informazioni estratte e elaborate nel formato intermedio. E comune a tutte le tre tipologie di banche dati e consiste nella: pulizia generale delle informazioni (ad esempio eliminazione caratteri spuri o spazi o tab all inizio o alle fine delle singole informazioni); eliminazione informazioni incomplete; normalizzazione delle informazioni secondo il modello di POI definito (ad esempio normalizzazione indirizzi, tag POI, etc.); utilizzo delle codifiche predefinite (ad esempio eliminazione abbreviazioni od utilizzo delle corrette abbreviazioni); eliminazione POI geograficamente inconsistenti ovvero non comprese nell extent geografico definito Caricamento Il processo di caricamento inserisce le informazioni derivate dal processo di trasformazione nelle banche dati dei POI veri e propri. E comune a tutte le tre tipologie di banche dati ed è strutturato in maniera tale da riconoscere se un POI non esiste nella banca dati dei POI oppure già stato inserito. In questo secondo caso segue regole predefinite per decidere se procedere o meno all aggiornamento totale o parziale delle informazioni già presenti per il POI individuato come duplicato. 28
299 5 Acronimi IR Information retrieval GIS GPS CTR RNDT GMS GIR ETL Geographic information system Global Positioning System Carta Tecnica Regionale Repertorio Nazionale dei Dati Territoriali (RNDT) gazetteer management software GMS Geographic information retrieval Extract, Transform e Load 29
300 6 Bibliografia 1. Wikipedia, the free encyclopedia, Geographic information retrieval, 2. Geographic Information Retrieval, Alexander Markowetz, Thomas Brinkho, Bernhard Seeger, 2004, University of Bonn; 3. Open Source Geospatial Foundation, 4. Open Geospatial Consortium, 5. ETL The process of updating the data warehouse, Hugh J. Watson, Terry College of Business University of Georgia, 30
301 Technical Report TR D3.5.5 Analisi dello stato dell'arte sulle banche dati da utilizzare come information source per la generazione di POI Il presente documento costituisce il technical report TR D3.5.5 previsto nel report di ricerca D3.5 Relazione su scenari, modelli implementativi e specifiche architetturali/funzionali di soluzioni di image processing ed information processing per la generazione massiva di punti di interesse georeferenziati nei parchi impliciti (smartspotting) del progetto NeoLuoghi.
302 Indice generale 1 Introduzione metodologica Limitazioni nell analisi delle information source Classificazione delle information source Dati strutturati Dati non-strutturati Dati semi-strutturati Metodologia per la individuazione delle information source Information source selezionate Information source con dati strutturati Registro Imprese Openstreetmap Information source con dati non strutturati Pagine web sito istituzionale del Comune di Napoli, sezioni cultura e turismo Pagine web Wikipedia su Napoli Giuda della Campania: Napoli Guida di Napoli Weagoo.com Information source con dati semi-strutturati Pagine gialle Trip Advisor Sito istituzionale Comune di Napoli Universita.it Guida Michelin bed-and-breakfast-in-italy.com parrocchie.it spaghi.it Travel Italia Acronimi
303 Figure Figura 1: Utilizzo motori di ricerca in Italia... 8 Figura 2: Napoli Centro visualizzazione con OpenStreetMap...11 Figura 3: Copertina Guida Giuda della Campania...14 Figura 4: Copertina Guida di Napoli Weagoo.com
304 1 Introduzione metodologica Information source può essere definita come un elemento che contiene informazioni che possono essere di utilità per qualche scopo o qualcuno. Information source possono dunque essere osservazioni, persone, libri, giornali, siti web, foto, etc. Nel proseguo del documento è analizzato lo stato dell arte sulle banche dati che possono essere utilizzate come information source per la generazione dei point of interest (POI) come previsti nel progetto di ricerca. 4
305 2 Limitazioni nell analisi delle information source L analisi delle information source specificatamente dedicate alla generazione di POI, ovvero informazioni associate ad una posizione geografica sulla superficie terrestre, richiede necessariamente di imporre preliminarmente alcune limitazioni nella scelta dei possibili candidati: 1. information source con contenuti che consentono di determinare una posizione geografica ovvero: toponimi (nome di luogo); indirizzi (posizione su un grafo stradale); riferimenti catastali. I contenuti sopra elencati, tramite le tecnologie discusse nei precedenti technical report, possono essere converti, con una precisione variabile, in coordinate geografiche in un dato sistema di riferimento e quindi localizzati sulla superficie terrestre e visualizzati su una mappa geografica. Più precisamente sono prese in considerazione le banche dati che contengono informazioni localizzate nel comune di Napoli (inteso come limite amministrativo associato ad una estensione geografica); 2. nel caso di generazione automatica o semi automatica di POI, attraverso il componente smartspotting, sono presi in considerazione esclusivamente contenuti digitali. 5
306 3 Classificazione delle information source Information source possono essere suddivise in differenti classi a seconda della struttura e tipologia delle informazioni in esse contenute Dati strutturati Sono dati conservati in banche dati organizzate secondo modelli e strutture definite e rigide. Esempi di dati strutturati sono quelli contenuti in database relazionali o gerarchici oppure in un foglio excel. I dati strutturati sono strettamente dipendenti dalla definizione del modello di dati (entità e relazioni) e delle tipologie di dati che sono memorizzati. I dati strutturati hanno il vantaggio di essere facilmente gestibili (inserimento, elaborazione ed interrogazione delle banche dati associate). Questa tipologia di dati è la più indicata per i modelli di gestione relazionale delle informazioni Dati non-strutturati I dati non-strutturati sono dati grezzi memorizzati senza alcun modello o schema. Un esempio possono essere i file contenenti testi a carattere narrativo (free text) prodotti per mezzo di un software di editing testuale oppure un file multimediale. In questo caso i sistemi di gestione utilizzabili sono quelli basati sui modelli dell information retrieval Dati semi-strutturati I dati semi-strutturati sono una forma di dato strutturato che non risponde a un modello o schema definito, ma che, tuttavia, contiene tag o altre tipologie di marker che permettono la individuazione di elementi semantici, gerarchie e item con specifiche informazioni. Nei dati semi-strutturati le entità appartenenti alla stessa classe possono avere attributi differenti e l ordine degli attributi non è importante. Un esempio esplicativo di questa tipologia di informazioni è il file compilato con sintassi XML. Nonostante non vi siano limiti strutturali all inserimento dei dati, le informazioni vengono, comunque, organizzate secondo logiche strutturate e interoperabili. In questo caso, i sistemi di gestione dei dati possono organizzare i contenuti sia attraverso i modelli relazionali, sia attraverso modelli di information retrieval. 6

307 4 Metodologia per la individuazione delle information source L individuazione delle information source da utilizzare per la generazione dei POI è stata realizzata esaminando i contenuti presenti sul web avendo come obiettivo quello di individuare sorgenti il più possibile eterogenee e complete al fine avere una casistica sufficiente per verificare con precisione i risultati del progetto di ricerca. Si è proceduto diversamente a seconda della classificazione delle information source: 1. dati strutturati. Si è stabilito di utilizzare un insieme di sorgenti che rispondessero ai requisiti di: a. i contenuti sono georeferenziati (ovvero contengono sufficienti elementi per poter georeferenziare le informazioni); b. affidabilità e completezza; c. tecnologie di interfacciamento ed estrazione delle informazioni che rappresentano lo stato dell arte nel settore di riferimento; d. possibilità di effettuare query con attributi geografici (es. estrai tutte le pizzerie del comune di Napoli); e. contenuti disponibili senza licenza d uso oppure contenuti di banche dati istituzionali. 2. dati non-strutturati. Si è stabilito di utilizzare un insieme di sorgenti che rispondessero ai requisiti di: a. i contenuti sono riferiti alla estensione geografica di interesse (comune di Napoli); b. formati digitali eterogenei (html, pdf, etc.); c. differenti finalità (commerciali, studio, istituzionali); d. differente pubblico target (giovani, famiglie, etc.). 3. dati semi-strutturati. In questo caso si è proceduto come segue: a. selezione di un motore di ricerca. Si è stabilito, utilizzando esclusivamente il criterio di affidabilità e maggior utilizzo, di utilizzare Google: 7
IL SISTEMA CARTOGRAFICO NAZIONALE
 IL SISTEMA CARTOGRAFICO NAZIONALE La Il paragrafo è intitolato La Carta di Gauss poiché, delle infinite formule che si possono adottare per mettere in corrispondenza i punti dell'ellissoide con quelli
IL SISTEMA CARTOGRAFICO NAZIONALE La Il paragrafo è intitolato La Carta di Gauss poiché, delle infinite formule che si possono adottare per mettere in corrispondenza i punti dell'ellissoide con quelli
TOPOGRAFI A E ORIENTAMENTO IN MONTAGNA. 04-09-2014 XXIV Corso di Alpinismo A1
 Club Alpino Italiano - Sezione di Bozzolo TOPOGRAFI A E ORIENTAMENTO IN MONTAGNA TOPOGRAFIA E ORIENTAMENTO IN MONTAGNA Cenni di geodesia e topografia Cartografia Lettura ed interpretazione delle carte
Club Alpino Italiano - Sezione di Bozzolo TOPOGRAFI A E ORIENTAMENTO IN MONTAGNA TOPOGRAFIA E ORIENTAMENTO IN MONTAGNA Cenni di geodesia e topografia Cartografia Lettura ed interpretazione delle carte
La rappresentazione fornita dalle carte geografiche è:
 Le proiezioni geografiche La rappresentazione fornita dalle carte geografiche è: approssimata ridotta simbolica È approssimata perché non è possibile sviluppare su un piano una superficie sferica senza
Le proiezioni geografiche La rappresentazione fornita dalle carte geografiche è: approssimata ridotta simbolica È approssimata perché non è possibile sviluppare su un piano una superficie sferica senza
Sistema di riferimento
 Sistema di riferimento Storicamente divisione fra altimetria e planimetria (riferimento fisico riferimento matematico) Oggi dati sempre più integrati Domani? Dato di fatto - L acqua segue leggi fisiche
Sistema di riferimento Storicamente divisione fra altimetria e planimetria (riferimento fisico riferimento matematico) Oggi dati sempre più integrati Domani? Dato di fatto - L acqua segue leggi fisiche
SISTEMI DI RIFERIMENTO E PROIEZIONI
 SISTEMI DI RIFERIMENTO E PROIEZIONI Esistono 3 tipi di dati: 1- Dati tabellari (informativi) 2- Dati geometrici (territoriali) 3- Dati geometrici e tabellari (informativi territoriali) La localizzazione
SISTEMI DI RIFERIMENTO E PROIEZIONI Esistono 3 tipi di dati: 1- Dati tabellari (informativi) 2- Dati geometrici (territoriali) 3- Dati geometrici e tabellari (informativi territoriali) La localizzazione
Inserimento di distanze e di angoli nella carta di Gauss
 Inserimento di distanze e di angoli nella carta di Gauss Corso di laurea in Ingegneria per l Ambiente e il Territorio a.a. 2006-2007 Inserimento della distanza reale misurata nella carta di Gauss (passaggio
Inserimento di distanze e di angoli nella carta di Gauss Corso di laurea in Ingegneria per l Ambiente e il Territorio a.a. 2006-2007 Inserimento della distanza reale misurata nella carta di Gauss (passaggio
Sistemi di riferimento in uso in Italia
 Sistemi di riferimento in uso in Italia Sistemi di riferimento in uso in Italia Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Paolo Zatelli Università di Trento 1 /
Sistemi di riferimento in uso in Italia Sistemi di riferimento in uso in Italia Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Paolo Zatelli Università di Trento 1 /
Metodi di Posizionamento
 Metodi di Posizionamento Modi di posizionamento Determinazione di una posizione mediante GPS dipende: Accuratezza del dato ricercato Tipo di ricettore GPS Modi: Posizionamento assoluto Posizionamento relativo
Metodi di Posizionamento Modi di posizionamento Determinazione di una posizione mediante GPS dipende: Accuratezza del dato ricercato Tipo di ricettore GPS Modi: Posizionamento assoluto Posizionamento relativo
Elementi di cartografia: La lettura del territorio. Robbio, 9 Febbraio 2013 Tiziano Cattaneo Legambiente Lombardia
 Elementi di cartografia: La lettura del territorio Robbio, 9 Febbraio 2013 Tiziano Cattaneo Legambiente Lombardia Cenni storici Tavoletta di Nippur, 1500 A.C. Cenni storici Carta di Anassimandro, 550 A.C.
Elementi di cartografia: La lettura del territorio Robbio, 9 Febbraio 2013 Tiziano Cattaneo Legambiente Lombardia Cenni storici Tavoletta di Nippur, 1500 A.C. Cenni storici Carta di Anassimandro, 550 A.C.
1. Very Long Baseline Interferometry (VLBI), 2. Satellite Laser Ranging (SLR)
, 2. Satellite Laser Ranging (SLR)") Geodesia Dal greco Γεωδαισια: divisione della Terra Discipline collegate alla geodesia: 1. studio della forma del pianeta; 2. studio del campo di gravità del pianeta. Misure geodetiche: misure legate e
Geodesia Dal greco Γεωδαισια: divisione della Terra Discipline collegate alla geodesia: 1. studio della forma del pianeta; 2. studio del campo di gravità del pianeta. Misure geodetiche: misure legate e
Scuola Alpinismo "Cosimo Zappelli" CAI Viareggio NOZIONI DI ORIENTAMENTO
 Scuola Alpinismo "Cosimo Zappelli" CAI Viareggio NOZIONI DI ORIENTAMENTO Viareggio 02/05/2013 Introduzione Cos è l orientamento? L'orientamento è l'insieme delle tecniche che permettono di riconoscere
Scuola Alpinismo "Cosimo Zappelli" CAI Viareggio NOZIONI DI ORIENTAMENTO Viareggio 02/05/2013 Introduzione Cos è l orientamento? L'orientamento è l'insieme delle tecniche che permettono di riconoscere
I.I.S. G. MINUTOLI - MESSINA
 I.I.S. G. MINUTOLI - MESSINA OGGETTO : cenni sul seminario GPS del 24/09/2010 1) GNSS E PRINCIPI DI FUNZIONAMENTO: IL sistema GPS (ovvero Global Positioning System) è un sistema di posizionamento globale
I.I.S. G. MINUTOLI - MESSINA OGGETTO : cenni sul seminario GPS del 24/09/2010 1) GNSS E PRINCIPI DI FUNZIONAMENTO: IL sistema GPS (ovvero Global Positioning System) è un sistema di posizionamento globale
Classificazione delle carte
 Classificazione delle carte In base alla scala -carte geografiche 1:1.000.000 e inferiore -carte corografiche 1:1.000.000 1:200.000 -carte topografiche 1:100.000 a piccola scala 1:50.000 a media scala
Classificazione delle carte In base alla scala -carte geografiche 1:1.000.000 e inferiore -carte corografiche 1:1.000.000 1:200.000 -carte topografiche 1:100.000 a piccola scala 1:50.000 a media scala
Conversione coordinate Sistema Informativo Territoriale Regionale e Infrastruttura di Dati Territoriale (SITR-IDT)
") Conversione coordinate Sistema Informativo Territoriale Regionale e Infrastruttura di Dati Territoriale (SITR-IDT) Indice 1. Le trasformazioni di coordinate... 3 1.1 Coordinate massime e minime ammesse
Conversione coordinate Sistema Informativo Territoriale Regionale e Infrastruttura di Dati Territoriale (SITR-IDT) Indice 1. Le trasformazioni di coordinate... 3 1.1 Coordinate massime e minime ammesse
Relatore: Giovanni Telesca
 Potenza 15/10/2009 La necessità di gestire grandi volumi di informazioni, provenienti da molteplici fonti e organizzati secondo sistemi di georeferenziazione diversi per caratteristiche e accuratezza,
Potenza 15/10/2009 La necessità di gestire grandi volumi di informazioni, provenienti da molteplici fonti e organizzati secondo sistemi di georeferenziazione diversi per caratteristiche e accuratezza,
La Georeferenziazione dei dati territoriali
 La Georeferenziazione dei dati territoriali Dott. Alessandro Santucci ANNO ACCADEMICO 2006/07 Università di Pisa Dipartimento di Ingegneria Civile ARGOMENTI Georeferenziazione degli oggetti: concetti generali
La Georeferenziazione dei dati territoriali Dott. Alessandro Santucci ANNO ACCADEMICO 2006/07 Università di Pisa Dipartimento di Ingegneria Civile ARGOMENTI Georeferenziazione degli oggetti: concetti generali
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Sistema Informativo Geografico:
 Sistemi Informativi Geografici Sistema Informativo Geografico: È un sistema informativo che tratta informazioni spaziali georeferenziate, ne consente la gestione e l'analisi. Informazioni spaziali: dati
Sistemi Informativi Geografici Sistema Informativo Geografico: È un sistema informativo che tratta informazioni spaziali georeferenziate, ne consente la gestione e l'analisi. Informazioni spaziali: dati
L IMMAGINE DELLA TERRA
 L IMMAGINE DELLA TERRA 1 Capitolo 1 L orientamento e la misura del tempo Paralleli e meridiani La Terra ha, grossomodo, la forma di una sfera e dunque ha un centro dove si incontrano gli infiniti diametri.
L IMMAGINE DELLA TERRA 1 Capitolo 1 L orientamento e la misura del tempo Paralleli e meridiani La Terra ha, grossomodo, la forma di una sfera e dunque ha un centro dove si incontrano gli infiniti diametri.
1. PREMESSA 3. 2. DOTAZIONE TECNICA 4. Strumenti satellitare GPS TRIMBLE 5700-5800 a doppia frequenza 4. Stazione totale elettronica TRIMBLE 5600 4
 SOMMARIO 1. PREMESSA 3 2. DOTAZIONE TECNICA 4. Strumenti satellitare GPS TRIMBLE 5700-5800 a doppia frequenza 4. Stazione totale elettronica TRIMBLE 5600 4 3. INTRODUZIONE METODOLOGICA 5 4. ANALISI METODOLOGICA
SOMMARIO 1. PREMESSA 3 2. DOTAZIONE TECNICA 4. Strumenti satellitare GPS TRIMBLE 5700-5800 a doppia frequenza 4. Stazione totale elettronica TRIMBLE 5600 4 3. INTRODUZIONE METODOLOGICA 5 4. ANALISI METODOLOGICA
Cenni di geografia astronomica. Giorno solare e giorno siderale.
 Cenni di geografia astronomica. Tutte le figure e le immagini (tranne le ultime due) sono state prese dal sito Web: http://www.analemma.com/ Giorno solare e giorno siderale. La durata del giorno solare
Cenni di geografia astronomica. Tutte le figure e le immagini (tranne le ultime due) sono state prese dal sito Web: http://www.analemma.com/ Giorno solare e giorno siderale. La durata del giorno solare
Ministero delle Infrastrutture e dei Trasporti
 Ministero delle Infrastrutture e dei Trasporti Direzione generale per i porti S.I.D. SISTEMA INFORMATIVO DEMANIO MARITTIMO Guida alla compilazione del Modello Domanda D3 (Parte Tecnica: cartelloni, insegne
Ministero delle Infrastrutture e dei Trasporti Direzione generale per i porti S.I.D. SISTEMA INFORMATIVO DEMANIO MARITTIMO Guida alla compilazione del Modello Domanda D3 (Parte Tecnica: cartelloni, insegne
Corso Operatore C.R.I. nel Settore Emergenza Cartografia ed orientamento
 Corso Operatore C.R.I. nel Settore Emergenza Cartografia ed orientamento Contenuti della lezione 1. Definizioni generali 2. Le coordinate geografiche 3. Le carte e le proiezioni 4. Lettura di una carta
Corso Operatore C.R.I. nel Settore Emergenza Cartografia ed orientamento Contenuti della lezione 1. Definizioni generali 2. Le coordinate geografiche 3. Le carte e le proiezioni 4. Lettura di una carta
Basi di cartografia: le coordinate geografiche
 Basi di cartografia: le coordinate geografiche Introduzione Diversamente da una decina di anni fa, le coordinate geografiche di un luogo sono diventate una informazione usuale da fornire in ambito lavorativo.
Basi di cartografia: le coordinate geografiche Introduzione Diversamente da una decina di anni fa, le coordinate geografiche di un luogo sono diventate una informazione usuale da fornire in ambito lavorativo.
Introduzione al sistema GPS. Corso GPS riservato ai soci
 Introduzione al sistema GPS Corso GPS riservato ai soci Agenda 1. Generalità sul sistema GPS 2. Principi di orientamento 2 Generalità sul sistema GPS 3 NAVSTAR GPS, a cosa serve Il NAVSTAR GPS (Navigation
Introduzione al sistema GPS Corso GPS riservato ai soci Agenda 1. Generalità sul sistema GPS 2. Principi di orientamento 2 Generalità sul sistema GPS 3 NAVSTAR GPS, a cosa serve Il NAVSTAR GPS (Navigation
Proiezioni cartografiche in uso in Italia
 Proiezioni cartografiche in uso in Italia Proiezioni cartografiche in uso in Italia Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Paolo Zatelli Università di Trento
Proiezioni cartografiche in uso in Italia Proiezioni cartografiche in uso in Italia Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Paolo Zatelli Università di Trento
LA GRAFICA E LA GEOMETRIA OPERATIVA
 LA GRAFICA E LA GEOMETRIA OPERATIVA La geometria operativa, contrariamente a quella descrittiva basata sulle regole per la rappresentazione delle forme geometriche, prende in considerazione lo spazio racchiuso
LA GRAFICA E LA GEOMETRIA OPERATIVA La geometria operativa, contrariamente a quella descrittiva basata sulle regole per la rappresentazione delle forme geometriche, prende in considerazione lo spazio racchiuso
Istituto Comprensivo di Buddusò - Scuola Primaria - Ins. Dore
 Istituto Comprensivo di Buddusò - Scuola Primaria - Ins. Dore La terra ha la forma di una sfera e per rappresentarla si usa il Mappamondo chiamato anche globo I geografi hanno tracciato sul mappamondo
Istituto Comprensivo di Buddusò - Scuola Primaria - Ins. Dore La terra ha la forma di una sfera e per rappresentarla si usa il Mappamondo chiamato anche globo I geografi hanno tracciato sul mappamondo
DALLE CARTE ALLE SEZIONI GEOLOGICHE
 DALLE CARTE ALLE SEZIONI GEOLOGICHE PROFILO TOPOGRAFICO Il profilo topografico, detto anche profilo altimetrico, è l intersezione di un piano verticale con la superficie topografica. Si tratta quindi di
DALLE CARTE ALLE SEZIONI GEOLOGICHE PROFILO TOPOGRAFICO Il profilo topografico, detto anche profilo altimetrico, è l intersezione di un piano verticale con la superficie topografica. Si tratta quindi di
CONI, CILINDRI, SUPERFICI DI ROTAZIONE
 CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
La misura in topografia
 La misura in topografia In questa dispensa di fornisce un cenno agli strumenti e alle tecniche di misura impiegate in topografia. Vengono descritti gli strumenti per misurare le lunghezze, quali il flessometro,
La misura in topografia In questa dispensa di fornisce un cenno agli strumenti e alle tecniche di misura impiegate in topografia. Vengono descritti gli strumenti per misurare le lunghezze, quali il flessometro,
Basi di Dati Spaziali
 degli Studi Basi di Dati Spaziali Introduzione ai Geographical Information Systems (GIS) Alessandra Chiarandini - Lezione 4 Cartografia Italiana Introduzione ai GIS A. Chiarandini 22 La Cartografia IGM
degli Studi Basi di Dati Spaziali Introduzione ai Geographical Information Systems (GIS) Alessandra Chiarandini - Lezione 4 Cartografia Italiana Introduzione ai GIS A. Chiarandini 22 La Cartografia IGM
Cpia di Lecce. Le coordinate geografiche
 Cpia di Lecce Le coordinate geografiche Forma della Terra La Terra è sferica Per la sua rappresentazione si usa il globo o mappamondo Meridiani e paralleli sono linee immaginarie usate dai geografi per
Cpia di Lecce Le coordinate geografiche Forma della Terra La Terra è sferica Per la sua rappresentazione si usa il globo o mappamondo Meridiani e paralleli sono linee immaginarie usate dai geografi per
TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA
 SCUOLA PRIMARIA DI CORTE FRANCA MATEMATICA CLASSE QUINTA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA L ALUNNO SVILUPPA UN ATTEGGIAMENTO POSITIVO RISPETTO ALLA MATEMATICA,
SCUOLA PRIMARIA DI CORTE FRANCA MATEMATICA CLASSE QUINTA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA L ALUNNO SVILUPPA UN ATTEGGIAMENTO POSITIVO RISPETTO ALLA MATEMATICA,
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei patrimoni
 CONVEGNO FACILITY MANAGEMENT: LA GESTIONE INTEGRATA DEI PATRIMONI PUBBLICI GENOVA FACOLTA DI ARCHITETTURA 06.07.2010 Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei
CONVEGNO FACILITY MANAGEMENT: LA GESTIONE INTEGRATA DEI PATRIMONI PUBBLICI GENOVA FACOLTA DI ARCHITETTURA 06.07.2010 Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei
(Esercizi Tratti da Temi d esame degli ordinamenti precedenti)
") (Esercizi Tratti da Temi d esame degli ordinamenti precedenti) Esercizio 1 L'agenzia viaggi GV - Grandi Viaggi vi commissiona l'implementazione della funzione AssegnaVolo. Tale funzione riceve due liste
(Esercizi Tratti da Temi d esame degli ordinamenti precedenti) Esercizio 1 L'agenzia viaggi GV - Grandi Viaggi vi commissiona l'implementazione della funzione AssegnaVolo. Tale funzione riceve due liste
Fondamenti osservativi di un Mappamondo Parallelo
 Fondamenti osservativi di un Mappamondo Parallelo Néstor CAMINO Complejo PLAZA DEL CIELO Facultad de Ingeniería (UNPSJB) y ISFD N 804 Esquel, Chubut, Patagonia, ARGENTINA. nestor.camino@speedy.com.ar -
Fondamenti osservativi di un Mappamondo Parallelo Néstor CAMINO Complejo PLAZA DEL CIELO Facultad de Ingeniería (UNPSJB) y ISFD N 804 Esquel, Chubut, Patagonia, ARGENTINA. nestor.camino@speedy.com.ar -
A.S. 2012-1013 CLASSE PRIMA SCUOLA PRIMARIA D ISTITUTO COMPETENZA CHIAVE EUROPEA DISCIPLINA
 ISTITUTO COMPRENSIVO STATALE di Scuola dell Infanzia, Scuola Primaria e Scuola Secondaria di 1 grado San Giovanni Teatino (CH) CURRICOLO A.S. 2012-1013 CLASSE PRIMA SCUOLA PRIMARIA OBIETTIVI DI Sviluppa
ISTITUTO COMPRENSIVO STATALE di Scuola dell Infanzia, Scuola Primaria e Scuola Secondaria di 1 grado San Giovanni Teatino (CH) CURRICOLO A.S. 2012-1013 CLASSE PRIMA SCUOLA PRIMARIA OBIETTIVI DI Sviluppa
SISTEMI INFORMATIVI TERRITORIALI E GOVERNO INTEGRATO DEL TERRITORIO: INTRODUZIONE ALLE BASI DATI GEOGRAFICHE
 SISTEMI INFORMATIVI TERRITORIALI E GOVERNO INTEGRATO DEL TERRITORIO: INTRODUZIONE ALLE BASI DATI GEOGRAFICHE Rev. 0 03/06/2014 Arch. Chiara Dell Orto IL SIT NON È UNA TRADIZIONALE CARTOGRAFIA DISPONIBILITÀ
SISTEMI INFORMATIVI TERRITORIALI E GOVERNO INTEGRATO DEL TERRITORIO: INTRODUZIONE ALLE BASI DATI GEOGRAFICHE Rev. 0 03/06/2014 Arch. Chiara Dell Orto IL SIT NON È UNA TRADIZIONALE CARTOGRAFIA DISPONIBILITÀ
Excel. A cura di Luigi Labonia. e-mail: luigi.lab@libero.it
 Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
ISTITUTO COMPRENSIVO MONTEGROTTO TERME SCUOLA PRIMARIA DISCIPLINA: MATEMATICA - CLASSE PRIMA OBIETTIVI DI APPRENDIMENTO
 PRIMA DELLA DISCIPLINA: MATEMATICA - CLASSE PRIMA L alunno si muove con sicurezza nel calcolo scritto e mentale con i numeri naturali. Legge e comprende testi che coinvolgono aspetti logici e matematici.
PRIMA DELLA DISCIPLINA: MATEMATICA - CLASSE PRIMA L alunno si muove con sicurezza nel calcolo scritto e mentale con i numeri naturali. Legge e comprende testi che coinvolgono aspetti logici e matematici.
Sistemi di riferimento
 Sistemi di riferimento Sistemi di riferimento Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Paolo Zatelli Università di Trento 1 / 40 Sistemi di riferimento Outline
Sistemi di riferimento Sistemi di riferimento Paolo Zatelli Dipartimento di Ingegneria Civile ed Ambientale Università di Trento Paolo Zatelli Università di Trento 1 / 40 Sistemi di riferimento Outline
Una carta geografica diversa la proiezione cartografica di Arno Peters
 Una carta geografica diversa la proiezione cartografica di Arno Peters Nella proiezione di Mercatore la Germania (patria elettiva del geografo) e l Europa si trovano al centro del mondo, sia in senso latitudinale
Una carta geografica diversa la proiezione cartografica di Arno Peters Nella proiezione di Mercatore la Germania (patria elettiva del geografo) e l Europa si trovano al centro del mondo, sia in senso latitudinale
Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE. Operare con i numeri
 COMPETENZA CHIAVE MATEMATICA Fonte di legittimazione Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE L alunno utilizza il calcolo scritto e mentale con i numeri
COMPETENZA CHIAVE MATEMATICA Fonte di legittimazione Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE L alunno utilizza il calcolo scritto e mentale con i numeri
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
Processo di rendering
 Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Ministero delle Infrastrutture e dei Trasporti
 Ministero delle Infrastrutture e dei Trasporti UNITÀ DI GESTIONE DELLE INFRASTRUTTURE PER LA NAVIGAZIONE ED IL DEMANIO MARITTIMO S.I.D. SISTEMA INFORMATIVO DEMANIO MARITTIMO GUIDA ALLA COMPILAZIONE DEL
Ministero delle Infrastrutture e dei Trasporti UNITÀ DI GESTIONE DELLE INFRASTRUTTURE PER LA NAVIGAZIONE ED IL DEMANIO MARITTIMO S.I.D. SISTEMA INFORMATIVO DEMANIO MARITTIMO GUIDA ALLA COMPILAZIONE DEL
DEFINIZIONE di CARTA. Carta di Mercatore Schermata ArcView. Generalità sulle carte e sui GIS 1
 DEFINIZIONE di CARTA Carta di Mercatore Schermata ArcView Una carta geografica non è altro che una figura piana, che rappresenta la superficie della Terra o una sua porzione (Lagrange 1736-1813) Generalità
DEFINIZIONE di CARTA Carta di Mercatore Schermata ArcView Una carta geografica non è altro che una figura piana, che rappresenta la superficie della Terra o una sua porzione (Lagrange 1736-1813) Generalità
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Librerie digitali. Video. Gestione di video. Caratteristiche dei video. Video. Metadati associati ai video. Metadati associati ai video
 Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Trasformazioni Geometriche 1 Roberto Petroni, 2011
 1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
EXCEL PER WINDOWS95. sfruttare le potenzialità di calcolo dei personal computer. Essi si basano su un area di lavoro, detta foglio di lavoro,
 EXCEL PER WINDOWS95 1.Introduzione ai fogli elettronici I fogli elettronici sono delle applicazioni che permettono di sfruttare le potenzialità di calcolo dei personal computer. Essi si basano su un area
EXCEL PER WINDOWS95 1.Introduzione ai fogli elettronici I fogli elettronici sono delle applicazioni che permettono di sfruttare le potenzialità di calcolo dei personal computer. Essi si basano su un area
Luigi Piroddi piroddi@elet.polimi.it
 Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
GPS? SINTETICAMENTE STRUTTURA WGS 84 TECNICHE DI MISURAZIONE RILIEVO TOPOGRAFICO PRECISIONE E FONTI DI ERRORE RETE GPS
 GPS GPS? SINTETICAMENTE STRUTTURA WGS 84 TECNICHE DI MISURAZIONE RILIEVO TOPOGRAFICO PRECISIONE E FONTI DI ERRORE RETE GPS GPS Global Positioning System è costituito da una costellazione di satelliti NAVSTAR
GPS GPS? SINTETICAMENTE STRUTTURA WGS 84 TECNICHE DI MISURAZIONE RILIEVO TOPOGRAFICO PRECISIONE E FONTI DI ERRORE RETE GPS GPS Global Positioning System è costituito da una costellazione di satelliti NAVSTAR
Mete e coerenze formative. Dalla scuola dell infanzia al biennio della scuola secondaria di II grado
 Mete e coerenze formative Dalla scuola dell infanzia al biennio della scuola secondaria di II grado Area disciplinare: Area Matematica Finalità Educativa Acquisire gli alfabeti di base della cultura Disciplina
Mete e coerenze formative Dalla scuola dell infanzia al biennio della scuola secondaria di II grado Area disciplinare: Area Matematica Finalità Educativa Acquisire gli alfabeti di base della cultura Disciplina
Capitolo 13: L offerta dell impresa e il surplus del produttore
 Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Corso di Informatica Generale (C. L. Economia e Commercio) Ing. Valerio Lacagnina Rappresentazione in virgola mobile
 Ing. Valerio Lacagnina Rappresentazione in virgola mobile") Problemi connessi all utilizzo di un numero di bit limitato Abbiamo visto quali sono i vantaggi dell utilizzo della rappresentazione in complemento alla base: corrispondenza biunivoca fra rappresentazione
Problemi connessi all utilizzo di un numero di bit limitato Abbiamo visto quali sono i vantaggi dell utilizzo della rappresentazione in complemento alla base: corrispondenza biunivoca fra rappresentazione
Sistema di diagnosi CAR TEST
 Data: 30/09/09 1 di 7 Sistema di diagnosi CAR TEST Il sistema di diagnosi CAR TEST venne convenientemente utilizzato per: - verificare che la scocca di un veicolo sia dimensionalmente conforme ai disegni
Data: 30/09/09 1 di 7 Sistema di diagnosi CAR TEST Il sistema di diagnosi CAR TEST venne convenientemente utilizzato per: - verificare che la scocca di un veicolo sia dimensionalmente conforme ai disegni
1. Introduzione. 2. Il Progetto
 1. Introduzione Con l espressione trasporto pubblico locale intelligente si intende l uso di tecnologie a supporto della mobilità e degli spostamenti di persone. Grazie allo sviluppo di dispositivi e strumenti
1. Introduzione Con l espressione trasporto pubblico locale intelligente si intende l uso di tecnologie a supporto della mobilità e degli spostamenti di persone. Grazie allo sviluppo di dispositivi e strumenti
13. Campi vettoriali
 13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
Implementazione su web del sistema WIND-GIS
 Implementazione su web del sistema WIND-GIS Contenuti dell applicazione Il layout dell applicazione si articola in diverse sezioni, ognuna delle quali offre specifiche funzionalità. La sezione più importante
Implementazione su web del sistema WIND-GIS Contenuti dell applicazione Il layout dell applicazione si articola in diverse sezioni, ognuna delle quali offre specifiche funzionalità. La sezione più importante
TECNICO SUPERIORE PER I RILEVAMENTI TERRITORIALI INFORMATIZZATI
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE EDILIZIA TECNICO SUPERIORE PER I RILEVAMENTI TERRITORIALI INFORMATIZZATI STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI TECNICO SUPERIORE PER I
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE EDILIZIA TECNICO SUPERIORE PER I RILEVAMENTI TERRITORIALI INFORMATIZZATI STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI TECNICO SUPERIORE PER I
Gps e Cartografia Digitale Sistema e principi di funzionamento. 2 Corso ASE Popoli, 5 luglio 2015 AE Arturo Acciavatti
 Gps e Cartografia Digitale Sistema e principi di funzionamento 2 Corso ASE Popoli, 5 luglio 2015 AE Arturo Acciavatti Carta topografica Bussola Altimetro Orientamento classico 2 L orientamento classico
Gps e Cartografia Digitale Sistema e principi di funzionamento 2 Corso ASE Popoli, 5 luglio 2015 AE Arturo Acciavatti Carta topografica Bussola Altimetro Orientamento classico 2 L orientamento classico
Interesse, sconto, ratei e risconti
 TXT HTM PDF pdf P1 P2 P3 P4 293 Interesse, sconto, ratei e risconti Capitolo 129 129.1 Interesse semplice....................................................... 293 129.1.1 Esercizio per il calcolo dell
TXT HTM PDF pdf P1 P2 P3 P4 293 Interesse, sconto, ratei e risconti Capitolo 129 129.1 Interesse semplice....................................................... 293 129.1.1 Esercizio per il calcolo dell
RETTE, PIANI, SFERE, CIRCONFERENZE
 RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
Registratori di Cassa
 modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
LA FORMA DELLA TERRA
 LA FORMA DELLA TERRA La forma approssimativamente sferica della Terra può essere dimostrata con alcune prove fisiche, valide prima che l Uomo osservasse la Terra dallo Spazio: 1 - Avvicinamento di una
LA FORMA DELLA TERRA La forma approssimativamente sferica della Terra può essere dimostrata con alcune prove fisiche, valide prima che l Uomo osservasse la Terra dallo Spazio: 1 - Avvicinamento di una
4. Proiezioni del piano e dello spazio
 4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
FIRESHOP.NET. Gestione del taglia e colore. www.firesoft.it
 FIRESHOP.NET Gestione del taglia e colore www.firesoft.it Sommario SOMMARIO Introduzione... 3 Configurazione iniziale... 5 Gestione delle varianti... 6 Raggruppamento delle varianti... 8 Gestire le varianti
FIRESHOP.NET Gestione del taglia e colore www.firesoft.it Sommario SOMMARIO Introduzione... 3 Configurazione iniziale... 5 Gestione delle varianti... 6 Raggruppamento delle varianti... 8 Gestire le varianti
GEOMETRIA DELLE MASSE
 1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
( x) ( x) 0. Equazioni irrazionali
 ( x) 0. Equazioni irrazionali") Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
GPS Global Positioning System
 GPS Global Positioning System GNSS GNSS Global Navigation Satellite System Il GNSS (Global Navigation Satellite System) è il sistema globale di navigazione satellitare basato sul sistema statunitense GPS
GPS Global Positioning System GNSS GNSS Global Navigation Satellite System Il GNSS (Global Navigation Satellite System) è il sistema globale di navigazione satellitare basato sul sistema statunitense GPS
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Sistema Banca dati e Repertorio dei dispositivi medici Notifiche multiple di DM simili
 Sistema Banca dati e Repertorio dei dispositivi medici Notifiche multiple di DM simili Questa presentazione intende illustrare brevemente la nuova funzionalità (Notifiche multiple di DM simili) predisposta
Sistema Banca dati e Repertorio dei dispositivi medici Notifiche multiple di DM simili Questa presentazione intende illustrare brevemente la nuova funzionalità (Notifiche multiple di DM simili) predisposta
LA RETTA. Retta per l'origine, rette orizzontali e verticali
 Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Creare una Rete Locale Lezione n. 1
 Le Reti Locali Introduzione Le Reti Locali indicate anche come LAN (Local Area Network), sono il punto d appoggio su cui si fonda la collaborazione nel lavoro in qualunque realtà, sia essa un azienda,
Le Reti Locali Introduzione Le Reti Locali indicate anche come LAN (Local Area Network), sono il punto d appoggio su cui si fonda la collaborazione nel lavoro in qualunque realtà, sia essa un azienda,
Altezza del sole sull orizzonte nel corso dell anno
 Lucia Corbo e Nicola Scarpel Altezza del sole sull orizzonte nel corso dell anno 2 SD ALTEZZA DEL SOLE E LATITUDINE Per il moto di Rivoluzione che la Terra compie in un anno intorno al Sole, ad un osservatore
Lucia Corbo e Nicola Scarpel Altezza del sole sull orizzonte nel corso dell anno 2 SD ALTEZZA DEL SOLE E LATITUDINE Per il moto di Rivoluzione che la Terra compie in un anno intorno al Sole, ad un osservatore
LA CONOSCENZA DEL MONDO SCUOLA DELL INFANZIA. OBIETTIVI DI APPRENDIMENTO 3 anni 4 anni 5 anni
 SCUOLA DELL INFANZIA INDICATORI LA CONOSCENZA DEL MONDO OBIETTIVI DI APPRENDIMENTO 3 anni 4 anni 5 anni Riconoscere la quantità. Ordinare piccole quantità. Riconoscere la quantità. Operare e ordinare piccole
SCUOLA DELL INFANZIA INDICATORI LA CONOSCENZA DEL MONDO OBIETTIVI DI APPRENDIMENTO 3 anni 4 anni 5 anni Riconoscere la quantità. Ordinare piccole quantità. Riconoscere la quantità. Operare e ordinare piccole
LA LEGGE DI GRAVITAZIONE UNIVERSALE
 GRAVIMETRIA LA LEGGE DI GRAVITAZIONE UNIVERSALE r La legge di gravitazione universale, formulata da Isaac Newton nel 1666 e pubblicata nel 1684, afferma che l'attrazione gravitazionale tra due corpi è
GRAVIMETRIA LA LEGGE DI GRAVITAZIONE UNIVERSALE r La legge di gravitazione universale, formulata da Isaac Newton nel 1666 e pubblicata nel 1684, afferma che l'attrazione gravitazionale tra due corpi è
Serata su GPS. Luca Delucchi. 7 Giugno 2013, Trento. Fondazione Edmund Mach - GIS & Remote Sensing Unit. http://gis.cri.fmach.it
 Serata su GPS Fondazione Edmund Mach - GIS & Remote Sensing Unit http://gis.cri.fmach.it 1 Cos è e come funziona Storia 2 Datalogger GPS Cellulari 3 Waypoints Tracce Rotte TracBack Bussola elettronica
Serata su GPS Fondazione Edmund Mach - GIS & Remote Sensing Unit http://gis.cri.fmach.it 1 Cos è e come funziona Storia 2 Datalogger GPS Cellulari 3 Waypoints Tracce Rotte TracBack Bussola elettronica
SmartGPS Satellite Information System Guida all utilizzo del programma Sviluppato da Fabio e Marco Adriani Versione 1.0.0
 SmartGPS Satellite Information System Guida all utilizzo del programma Sviluppato da Fabio e Marco Adriani Versione 1.0.0 Benvenuto in SmartGPS, l'applicativo che consente di determinare, utilizzando un
SmartGPS Satellite Information System Guida all utilizzo del programma Sviluppato da Fabio e Marco Adriani Versione 1.0.0 Benvenuto in SmartGPS, l'applicativo che consente di determinare, utilizzando un
Università di L Aquila Facoltà di Biotecnologie Agro-alimentari
 RIFERIMENTI Università di L Aquila Facoltà di Biotecnologie Agro-alimentari Esame di Laboratorio di informatica e statistica Parte 3 (versione 1.0) Il riferimento permette di identificare univocamente
RIFERIMENTI Università di L Aquila Facoltà di Biotecnologie Agro-alimentari Esame di Laboratorio di informatica e statistica Parte 3 (versione 1.0) Il riferimento permette di identificare univocamente
Formazione SIAR Marzo - Aprile 2007. Sistemi Informativi Territoriali. Introduzione ai. Rossi Doria Laura Direzione Ambiente Servizi ambientali
 Formazione SIAR Marzo - Aprile 2007 Introduzione ai Sistemi Informativi Territoriali Rossi Doria Laura Direzione Ambiente Servizi ambientali Sommario Cos è il SIT Gli strumenti del SIT L informatizzazione
Formazione SIAR Marzo - Aprile 2007 Introduzione ai Sistemi Informativi Territoriali Rossi Doria Laura Direzione Ambiente Servizi ambientali Sommario Cos è il SIT Gli strumenti del SIT L informatizzazione
Monitoraggio a scala regionale: l impiego dei GIS e dei DGPS
 Monitoraggio a scala regionale: l impiego dei GIS e dei DGPS Augusto Screpanti ACS - ENEA augusto.screpanti@enea.it Rilevare e Rappresentare Rilevare il territorio attività di campagna come Rilievi geologici
Monitoraggio a scala regionale: l impiego dei GIS e dei DGPS Augusto Screpanti ACS - ENEA augusto.screpanti@enea.it Rilevare e Rappresentare Rilevare il territorio attività di campagna come Rilievi geologici
Spline Nurbs. IUAV Disegno Digitale. Camillo Trevisan
 Spline Nurbs IUAV Disegno Digitale Camillo Trevisan Spline e Nurbs Negli anni 70 e 80 del secolo scorso nelle aziende si è iniziata a sentire l esigenza di concentrare in un unica rappresentazione gestita
Spline Nurbs IUAV Disegno Digitale Camillo Trevisan Spline e Nurbs Negli anni 70 e 80 del secolo scorso nelle aziende si è iniziata a sentire l esigenza di concentrare in un unica rappresentazione gestita
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Analisi e diagramma di Pareto
 Analisi e diagramma di Pareto L'analisi di Pareto è una metodologia statistica utilizzata per individuare i problemi più rilevanti nella situazione in esame e quindi le priorità di intervento. L'obiettivo
Analisi e diagramma di Pareto L'analisi di Pareto è una metodologia statistica utilizzata per individuare i problemi più rilevanti nella situazione in esame e quindi le priorità di intervento. L'obiettivo
Il Sistema di Posizionamento Globale (GPS)
") Il Sistema di Posizionamento Globale (GPS) Metodo di base: triangolazione nello spazio I satelliti GPS Determinazione delle distanze dai satelliti mediante misure di tempi di arrivo dei segnali Come è
Il Sistema di Posizionamento Globale (GPS) Metodo di base: triangolazione nello spazio I satelliti GPS Determinazione delle distanze dai satelliti mediante misure di tempi di arrivo dei segnali Come è
Il controllo della visualizzazione
 Capitolo 3 Il controllo della visualizzazione Per disegnare in modo preciso è necessario regolare continuamente l inquadratura in modo da vedere la parte di disegno che interessa. Saper utilizzare gli
Capitolo 3 Il controllo della visualizzazione Per disegnare in modo preciso è necessario regolare continuamente l inquadratura in modo da vedere la parte di disegno che interessa. Saper utilizzare gli
Corso di. Dott.ssa Donatella Cocca
 Corso di Statistica medica e applicata Dott.ssa Donatella Cocca 1 a Lezione Cos'è la statistica? Come in tutta la ricerca scientifica sperimentale, anche nelle scienze mediche e biologiche è indispensabile
Corso di Statistica medica e applicata Dott.ssa Donatella Cocca 1 a Lezione Cos'è la statistica? Come in tutta la ricerca scientifica sperimentale, anche nelle scienze mediche e biologiche è indispensabile
Slide Cerbara parte1 5. Le distribuzioni teoriche
 Slide Cerbara parte1 5 Le distribuzioni teoriche I fenomeni biologici, demografici, sociali ed economici, che sono il principale oggetto della statistica, non sono retti da leggi matematiche. Però dalle
Slide Cerbara parte1 5 Le distribuzioni teoriche I fenomeni biologici, demografici, sociali ed economici, che sono il principale oggetto della statistica, non sono retti da leggi matematiche. Però dalle
Il database management system Access
 Il database management system Access Corso di autoistruzione http://www.manualipc.it/manuali/ corso/manuali.php? idcap=00&idman=17&size=12&sid= INTRODUZIONE Il concetto di base di dati, database o archivio
Il database management system Access Corso di autoistruzione http://www.manualipc.it/manuali/ corso/manuali.php? idcap=00&idman=17&size=12&sid= INTRODUZIONE Il concetto di base di dati, database o archivio
LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1
 LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1 I CODICI 1 IL CODICE BCD 1 Somma in BCD 2 Sottrazione BCD 5 IL CODICE ECCESSO 3 20 La trasmissione delle informazioni Quarta Parte I codici Il codice BCD
LA TRASMISSIONE DELLE INFORMAZIONI QUARTA PARTE 1 I CODICI 1 IL CODICE BCD 1 Somma in BCD 2 Sottrazione BCD 5 IL CODICE ECCESSO 3 20 La trasmissione delle informazioni Quarta Parte I codici Il codice BCD
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
MANUALE di ISTRUZIONI
 1 MANUALE di ISTRUZIONI 2 L ORA NEL MONDO Tutti gli strumenti di misura vengono ideati per eseguire la misura e la lettura di una data grandezza fisica. Per misurare la lunghezza di un oggetto si userà
1 MANUALE di ISTRUZIONI 2 L ORA NEL MONDO Tutti gli strumenti di misura vengono ideati per eseguire la misura e la lettura di una data grandezza fisica. Per misurare la lunghezza di un oggetto si userà
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI
 APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................