SISTEMI AUTOMATICI ED ORGANIZZAZIONE DELLA PRODUZIONE STABILITA DEI SISTEMI CRITERIO DI BODE. ESERCIZI SUL CRITERIO DI BODE Completamente svolti
|
|
|
- Marianna Sorrentino
- 7 anni fa
- Visualizzazioni
Transcript
1 SISTEMI AUTOMATICI ED ORGANIZZAZIONE DELLA PRODUZIONE STABILITA DEI SISTEMI CRITERIO DI BODE ESERCIZI SUL CRITERIO DI BODE Completamente svolti A cura del prof. Michele ZIMOTTI 1

2 Esercizi sulla stabilità di un sistema ESERCIZIO A Stabilire in base ai valori dei poli, se le seguenti fdt riferite a sistemi controreazionati ad anello chiuso, caratterizzano sistemi stabili: 10(s 2)(s - 4) a) (s + 1)(s + 5)(s + 7) 15(s + 1) b) (s + 3)(s - 4)(s + 6) 20(s 2) c) s(s + 3)(s + 7) 10s d) (s j)(s + 2-2j) 30 e) (s + 2)(s j)(s -3-2j) 15(s 3) f) (s + 4)(s ) 20 g) 2 2 (s - 9)(s + 9) 2 10s h) (s + 2)(s j)(s + 1-2j) (s + 1) i) 2 s (s + 2)(s + 3) 2
 f) (s + 4)(s 2 + 25) 20 g) 2 2 (s - 9)(s + 9) 2 10s h) (s + 2)(s + 1 + 2j)(s + 1-2j) (s + 1) i) 2 s (s + 2)(s +")
3 SOLUZIONE 10(s 2)(s - 4) a) (s + 1)(s + 5)(s + 7) la fdt proposta ha tutti i poli negativi: p 1 =-1; p 2 =-5; p 3 =-7 quindi si riferisce ad un sistema stabile. Il fatto di avere zeri positivi ( z 1 =2; z 2 =4) non influisce sulla stabilità del sistema. 15(s + 1) b) (s + 3)(s - 4)(s + 6) la fdt proposta ha i poli : p 1 =-3; p 2 =+4; p 3 =-6 quindi essendo presente il polo positivo p 2, si riferisce ad un sistema instabile. 20(s 2) c) s(s + 3)(s + 7) la fdt proposta ha i poli : p 1 =0; p 2 =-3; p 3 =-7 quindi essendo presente il polo nullo p 1, si riferisce ad un sistema al limite della stabilità. 3

4 10s d) (s j)(s + 2-2j) la fdt proposta ha i poli complessi coniugati: p 1 =-2-2j; p 2 =-2+2j con la parte reale negativa, quindi essa si riferisce ad un sistema stabile asintoticamente. 30 e) (s + 2)(s j)(s -3-2j) la fdt proposta ha i poli : p 1 =-2; p 2 =+3-2j; p 3 =+3+2j i cui poli complessi coniugati presentano la parte reale positiva, quindi essa si riferisce ad un sistema instabile. 15(s 3) f) (s + 4)(s ) la fdt proposta ha i poli : p 1 = - 4; p 2 =-5j; p 3 =+5j i cui poli immaginari coniugati presentano la parte reale nulla, quindi essa si riferisce ad un sistema stabile ma non asintoticamente. 4

5 20 g) 2 2 (s - 9)(s + 9) la fdt proposta ha i poli : p 1 = - 3; p 2 =+3; p 3 =+3j; p 4 =-3j poiché è presente un polo positivo p 2, il sistema è instabile. 2 10s h) (s + 2)(s j)(s + 1-2j) la fdt proposta ha i poli : p 1 = - 2; p 2 =-1-2j; p 3 =-1+2j il sistema è stabile asintoticamente. (s + 1) i) 2 s (s + 2)(s + 3) la fdt proposta ha i poli : p 1,2 =0 ; p 3 =-2; p 4 =-3 il sistema, avendo un polo nullo doppio, è instabile. 5

6 Esercizio B Stabilire se i seguenti sistemi, sollecitati da impulsi unitari o da segnali limitati in ingresso, sono stabili, asintoticamente stabili o instabili, in base al tipo di risposta. 1 Poiché l ingresso limitato produce un uscita di ampiezza limitata, il sistema è STABILE ma non asintoticamente. 2. se l ingresso è un segnale di tipo impulsivo, per caratterizzare un sistema stabile, la risposta deve tendere a zero e non essere limitata in ampiezza: quindi nel nostro caso il sistema è INSTABILE 6

7 3. Poiché l ingresso è un segnale di tipo impulsivo e la risposta tende a zero il sistema è STABILE 4. Poiché la risposta ad un segnale limitato in ampiezza tende a zero, il sistema è asintoticamente STABILE 5. Poiché la risposta ad un segnale impulsivo unitario tende a zero, il sistema è STABILE 7

8 6. Il sistema è stabile ma non asintoticamente, risposta limitata ad un segnale limitato 7. Poiché la risposta ad un segnale limitato in ampiezza diverge, il sistema è INSTABILE 8. Poiché la risposta ad un segnale impulsivo unitario tende a zero, il sistema è STABILE 8

9 9. Poiché la risposta ad un segnale impulsivo diverge, il sistema è INSTABILE. (Per essere stabile deve tendere a zero) ESERCIZIO C CRITERIO DI BODE 1. Dato il sistema controreazionato di figura determinare se è stabile tramite il criterio di BODE: 9

10 dove 20 s(1-2s) H(s) 1 = (1 + s) Soluzione La fdt ad anello aperto G(s)H(s) risulta 20) G(s)H(s) = s(1-2s)(1 + s) E poichè presenta un polo p=1/2 positivo, il sistema a cui è associata, è instabile e pertanto il criterio non può essere applicato. 2. Determinare se il sistema rappresentato in figura è stabile applicando il criterio di BODE Soluzione: La fdt ad anello aperto è: 10s G1(s)G2(s)H(s) == (s + 1)(s + 4)(s + 2) 10

11 Pertanto è stabile perchè presenta poli negativi, ma essendo la controreazione positiva, il criterio di BODE non può essere applicato. 3. Determinare, mediante il criterio di BODE, se il sistema rappresentato in figura è stabile: La fdt ad anello aperto del sistema 10(1-2s) G1(s)G2(s) == (1 + 3s)(1 + 5s) Risulta stabile presentando i poli p 1 =-1/3 e p 2 =-1/5 negativi, però non essendo a sfasamento minimo per avere uno zero positivo z 1 =1/2, il criterio di BODE non può essere applicato 11
 G1(s)G2(s) == (1 + 3s)(1 + 5s) Risulta stabile presentando i poli p 1 =-1/3 e p 2 =-1/5 negativi, però non")
12 ESERCIZIO D Si discuta la stabilità dei sistemi rappresentati a catena aperta dalle seguenti fdt mediante il criterio di BODE: 20(1 + s) a. G(s)H(s) == s(1 + 0,16s)(1 + 10s) -10(1 + s) b. G(s)H(s) == (1 + 4s)(1 + 10s) 30s c. G(s)H(s) == 2 (1 + 10s) (1 + 0,2s) 2 10(1 + s) d. G(s)H(s) == 2 s (1 + 2s)( s) 5(1 + 5s)( s) e. G(s)H(s) == (1 + 50s)( s)(1 + 0,1s) 0.5(1 + 20s) f. G(s)H(s) == (1 + 2s)( s)(1 + 0,05s) 12
H(s) == 2 s (1 + 2s)(1 + 0.1s) 5(1 + 5s)(1 + 1.25s) e. G(s)H(s) == (1 + 50s)(1 + 0.2s)(1 + 0,1s) 0.")
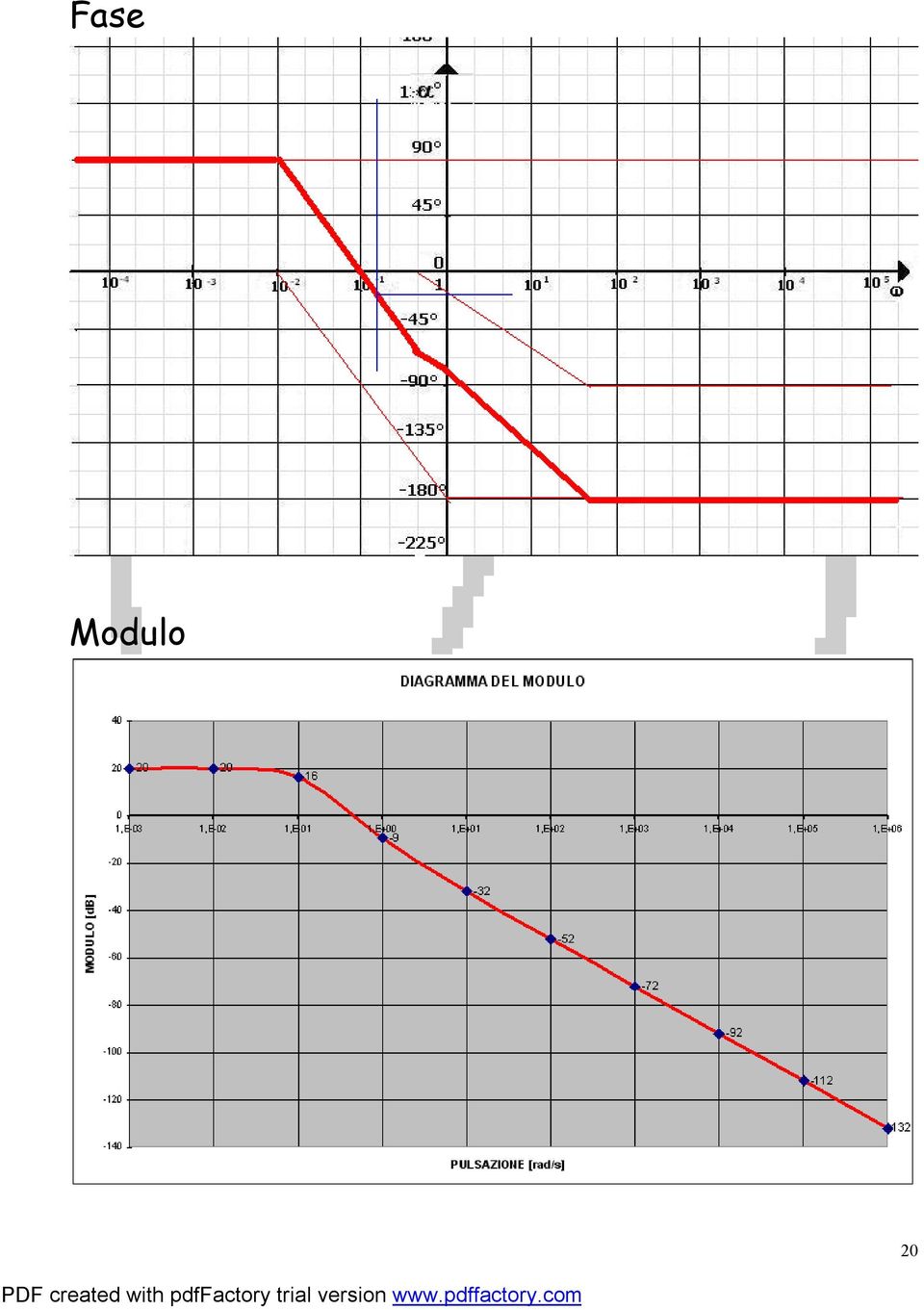
13 Soluzione a. Il diagramma di BODE delle attenuazioni 20(1 + jw) G(jw)H(jw) == jw(1 + 0,16jw)(1 + 10jw) Il guadagno statico Go[dB]= 20 Log20= 26 db Le pulsazioni d angolo: hw 1 =1 rad/s iw* 2 =1 rad/s ( polo nullo origine) iw 3 = 1/0,16= 6.25 rad/s iw 4 =1/10= 0.1 rad/s Modulo 13
![+ 0,16jw)(1 + 10jw) Il guadagno statico Go[dB]= 20 Log20= 26 db Le](/docs-images/49/20507325/images/page_13.jpg "pulsazioni d angolo: hw 1 =1 rad/s iw* 2 =1 rad/s ( polo nullo")
14 Fase 14

15 Essendo il modulo della fase, in corrispondenza della w t = 2 rad/s a 0 db, inferiore a 180, il sistema risulta STABILE e il margine di fase mdf=circa = circa 40 Lo sfasamento in corrispondenza della w t =2 rad/s si può determinare applicando la seguente formula ϕ t =ϕ(ω t )=arctgω t τ 1 + arctgω t τ 2 +arctgω t τ 3...-g arctgω t T 1 -arctgω t T 2 -arctgω t T 3 = arctg(2*1) arctg(2*0.16)- arctg(2*10)= = =
 -90 - arctg(2*0.16)- arctg(2*10)= =63.5-90 -17.")
16 b. Il diagramma di BODE delle attenuazioni -10(1 + jw) G(jw)H(jw) == (1 + 4jw)(1 + 10jw) Il guadagno statico Go[dB]= 20 Log10= 20 db Le pulsazioni d angolo: hw 1 =1 rad/s iw 2 =1/4=0.25 rad/s iw 3 = 1/10= 0.1 rad/s Modulo 16
![Go[dB]= 20 Log10= 20 db Le pulsazioni d angolo: hw 1 =1](/docs-images/49/20507325/images/page_16.jpg "rad/s iw 2 =1/4=0.25 rad/s iw 3 = 1/10= 0.")
17 Fase Modulo 17

18 Fase Il sistema è INSTABILE 18

19 c. Il diagramma di BODE delle attenuazioni 30(jw) G(jw)H(jw) == 2 (1 + 10jw) ( jw) Il guadagno statico Go[dB]= 20 Log30= 29.5 db Le pulsazioni d angolo: hw* 1 =1 rad/s ( origine) iiw 2 =1/10=0.1 rad/s iw 3 = 1/0.2= 5 rad/s Modulo 19
![2jw) Il guadagno statico Go[dB]= 20 Log30= 29.](/docs-images/49/20507325/images/page_19.jpg "5 db Le pulsazioni d angolo: hw* 1 =1 rad/s ( origine) iiw")
20 Fase Modulo 20
21 Fase Il sistema è STABILE 21
la fdt ha i poli: p 1 =-3; p 2 =+4; p 3 =-6. Essendo presente un polo positivo p 2 =+4 il sistema è instabile.
 ESERCIZI SVOLTI SUL CRITERIO DI BODE GRUPPO A Stabilire in base ai valori dei poli, se le seguenti fdt riferite a sistemi controreazionati ad anello chiuso, caratterizzano sistemi stabili: ESERCIZIO 1
ESERCIZI SVOLTI SUL CRITERIO DI BODE GRUPPO A Stabilire in base ai valori dei poli, se le seguenti fdt riferite a sistemi controreazionati ad anello chiuso, caratterizzano sistemi stabili: ESERCIZIO 1
La stabilità di un sistema non dipende dal segnale d ingresso, ma dipende solo dalla f.d.t. del sistema. Stabilità BIBO (Bound Input Bounded Output)
") 8.1 GENERALITÀ La stabilità di un sistema non dipende dal segnale d ingresso, ma dipende solo dalla f.d.t. del sistema f.d.t. = U(s) E(s) Stabilità BIBO (Bound Input Bounded Output) Un sistema lineare
8.1 GENERALITÀ La stabilità di un sistema non dipende dal segnale d ingresso, ma dipende solo dalla f.d.t. del sistema f.d.t. = U(s) E(s) Stabilità BIBO (Bound Input Bounded Output) Un sistema lineare
Capitolo. Stabilità dei sistemi di controllo. 8.1 Generalità. 8.2 Criterio generale di stabilità. 8.3 Esercizi - Criterio generale di stabilità
 Capitolo 7 Stabilità dei sistemi di controllo 8.1 Generalità 8. Criterio generale di stabilità 8.3 Esercizi - Criterio generale di stabilità 8.4 Criterio di stabilità di Nyquist 8.5 Esercizi - Criterio
Capitolo 7 Stabilità dei sistemi di controllo 8.1 Generalità 8. Criterio generale di stabilità 8.3 Esercizi - Criterio generale di stabilità 8.4 Criterio di stabilità di Nyquist 8.5 Esercizi - Criterio
Cognome Nome Matricola Corso
 Fondamenti di Controlli Automatici - A.A. 212/13 6 novembre 213 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che
Fondamenti di Controlli Automatici - A.A. 212/13 6 novembre 213 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che
5. Per ω = 1/τ il diagramma reale di Bode delle ampiezze della funzione G(jω) =
 =") Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
INGEGNERIA DELLE TELECOMUNICAZIONI
 INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME E SOLUZIONI 18 febbraio 2014 Anno Accademico 2012/2013 ESERCIZIO 1 Si consideri il sistema descritto dalle
INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME E SOLUZIONI 18 febbraio 2014 Anno Accademico 2012/2013 ESERCIZIO 1 Si consideri il sistema descritto dalle
Controlli automatici e controllo dei processi Docente: Davide M. Raimondo Prova scritta: 01/03/2013 Durata: 3h. Cognome Nome Matricola
 Controlli automatici e controllo dei processi Docente: Davide M. Raimondo Prova scritta: 01/03/2013 Durata: 3h Cognome Nome Matricola Esercizio 3: Si determini, motivando brevemente, la corrispondenza
Controlli automatici e controllo dei processi Docente: Davide M. Raimondo Prova scritta: 01/03/2013 Durata: 3h Cognome Nome Matricola Esercizio 3: Si determini, motivando brevemente, la corrispondenza
un sistema è stabile se, in conseguenza di una sollecitazione esterna limitata, la sua risposta (variazione dell uscita) è limitata (Bounded Input
 è limitata (Bounded Input") un sistema è stabile se, in conseguenza di una sollecitazione esterna limitata, la sua risposta (variazione dell uscita) è limitata (Bounded Input Bounded Output) Un sistema si dice asintoticamente stabile
un sistema è stabile se, in conseguenza di una sollecitazione esterna limitata, la sua risposta (variazione dell uscita) è limitata (Bounded Input Bounded Output) Un sistema si dice asintoticamente stabile
Il criterio di Nyquist
 0.0. 4.5 1 Il criterio di Nyquist IlcriteriodiNyquistconsentedistabilireseunsistema,delqualesiconosce la risposta armonica ad anello aperto, sia stabile o meno una volta chiuso in retroazione: r(t) e(t)
0.0. 4.5 1 Il criterio di Nyquist IlcriteriodiNyquistconsentedistabilireseunsistema,delqualesiconosce la risposta armonica ad anello aperto, sia stabile o meno una volta chiuso in retroazione: r(t) e(t)
Per un corretto funzionamento dei sistema si progetta un controllo a retroazione secondo lo schema di figura.
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
STABILITÀ DEI SISTEMI Metodo di Bode e Nyquist
 I.T.I. Modesto PANETTI B A R I Via Re David, 186-70125 BARI 080-542.54.12 - Fax 080-542.64.32 Internet http://www.itispanetti.it email : BATF05000C@istruzione.it INTRODUZIONE STABILITÀ DEI SISTEMI Metodo
I.T.I. Modesto PANETTI B A R I Via Re David, 186-70125 BARI 080-542.54.12 - Fax 080-542.64.32 Internet http://www.itispanetti.it email : BATF05000C@istruzione.it INTRODUZIONE STABILITÀ DEI SISTEMI Metodo
Diagrammi asintotici di Bode: esercizi. Tracciare i diagrammi asintotici di Bode della seguente funzione G(s): s 2. s(s 30)(1+ s
: s 2. s(s 30)(1+ s") .. 3.2 1 Nyquist: Diagrammi asintotici di Bode: esercizi Tracciare i diagrammi asintotici di Bode della seguente funzione G(s): 6(s2 +.8s+4) s(s 3)(1+ s 2 )2. Pendenza iniziale: -2 db/dec. Pulsazioni critiche:
.. 3.2 1 Nyquist: Diagrammi asintotici di Bode: esercizi Tracciare i diagrammi asintotici di Bode della seguente funzione G(s): 6(s2 +.8s+4) s(s 3)(1+ s 2 )2. Pendenza iniziale: -2 db/dec. Pulsazioni critiche:
Nome: Nr. Mat. Firma:
 Controlli Automatici A - A.A. 26/7 Secondo Compito 8 Dicembre 26 - Esercizi Compito A Nr. a = b = Nome: Nr. Mat. Firma: Negli esercizi che seguono, si sostituisca ad a e b i valori assegnati e si risponda
Controlli Automatici A - A.A. 26/7 Secondo Compito 8 Dicembre 26 - Esercizi Compito A Nr. a = b = Nome: Nr. Mat. Firma: Negli esercizi che seguono, si sostituisca ad a e b i valori assegnati e si risponda
Fondamenti di Automatica Prof. Luca Bascetta. Soluzioni della seconda prova scritta intermedia 25 giugno 2018
 Fondamenti di Automatica Prof. Luca Bascetta Soluzioni della seconda prova scritta intermedia 25 giugno 28 ESERCIZIO Si consideri il sistema di controllo di figura, con y variabile controllata e y o riferimento:
Fondamenti di Automatica Prof. Luca Bascetta Soluzioni della seconda prova scritta intermedia 25 giugno 28 ESERCIZIO Si consideri il sistema di controllo di figura, con y variabile controllata e y o riferimento:
Controlli Automatici LA Prova del 11/01/2005 Gruppo a
 Cognome Nome Matr. Prova del //5 Gruppo a Indicare a quale o a quali delle f.d.t. indicate possono corrispondere le seguenti risposte al gradino unitario.38.7.9.4.85.4 Amplitude.6.4..6.4. Step Response
Cognome Nome Matr. Prova del //5 Gruppo a Indicare a quale o a quali delle f.d.t. indicate possono corrispondere le seguenti risposte al gradino unitario.38.7.9.4.85.4 Amplitude.6.4..6.4. Step Response
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO. Schema generale di controllo in retroazione
 ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 3 luglio 19 - Quiz Per ciascuno dei
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 3 luglio 19 - Quiz Per ciascuno dei
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 2009/10 6 Settembre 2010 - Esercizi Compito Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t):
Fondamenti di Controlli Automatici - A.A. 2009/10 6 Settembre 2010 - Esercizi Compito Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t):
Cognome Nome Matricola Corso
 Fondamenti di Controlli Automatici - A.A. 23/4 23 luglio 24 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Fondamenti di Controlli Automatici - A.A. 23/4 23 luglio 24 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
INGEGNERIA DELLE TELECOMUNICAZIONI
 INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME II prova in itinere 4 luglio 214 Anno Accademico 213/214 ESERCIZIO 1 Si consideri il sistema seguente Si ponga
INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME II prova in itinere 4 luglio 214 Anno Accademico 213/214 ESERCIZIO 1 Si consideri il sistema seguente Si ponga
Sistemi di Controllo Esempio di domande teoriche a risposta multipla. Esempio di problemi e quesiti a risposta aperta
 Sistemi di Controllo Esempio di domande teoriche a risposta multipla Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte
Sistemi di Controllo Esempio di domande teoriche a risposta multipla Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2010/ gennaio 2012
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2010/2011 10 gennaio 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2010/2011 10 gennaio 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
Cognome Nome: Matricola: Corso di Laurea: Fondamenti di Controlli Automatici - A.A. 2011/12 20 settembre Domande Teoriche
 Fondamenti di Controlli Automatici - A.A. / settembre - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. / settembre - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Controlli Automatici 2 22/06/05 Compito a
 Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
SOLUZIONE. Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015
 a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.24-5 Prof. Silvia Strada Seconda prova intermedia 2 Febbraio 25 SOLUZIONE ESERCIZIO punti: 8 su 32 Si consideri un sistema dinamico,
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.24-5 Prof. Silvia Strada Seconda prova intermedia 2 Febbraio 25 SOLUZIONE ESERCIZIO punti: 8 su 32 Si consideri un sistema dinamico,
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 1/13 1 giugno 13 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si ritengono
Fondamenti di Controlli Automatici - A.A. 1/13 1 giugno 13 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si ritengono
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 13 febbraio 19 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 13 febbraio 19 - Quiz Per ciascuno
FONDAMENTI DI AUTOMATICA (Ingegneria Biomedica) Appello del 16 febbraio 2010: testo e soluzione. y = x 1
 Appello del 16 febbraio 2010: testo e soluzione. y = x 1") FONDAMENTI DI AUTOMATICA (Ingegneria Biomedica) Appello del 16 febbraio 21: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema descritto dalle seguenti equazioni: ẋ 1 = x 2 2 + x 1 ẋ 2 =
FONDAMENTI DI AUTOMATICA (Ingegneria Biomedica) Appello del 16 febbraio 21: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema descritto dalle seguenti equazioni: ẋ 1 = x 2 2 + x 1 ẋ 2 =
ESEMPI DI DIAGRAMMI DI BODE Esempio n.1 Tracciare il diagramma di Bode delle ampiezze per la seguente F(jω):
:") ESEMPI DI DIAGRAMMI DI BODE Esempio n. Tracciare il diagramma di Bode delle ampiezze per la seguente : = 3, 6 ( + ( + j, j, ( + j, Si ricavano i poli e gli zeri di ( +,s s = 3, 6 ( +, s ( +,s Non si hanno
ESEMPI DI DIAGRAMMI DI BODE Esempio n. Tracciare il diagramma di Bode delle ampiezze per la seguente : = 3, 6 ( + ( + j, j, ( + j, Si ricavano i poli e gli zeri di ( +,s s = 3, 6 ( +, s ( +,s Non si hanno
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ luglio Soluzione
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
Controlli Automatici Compito del - Esercizi
 Compito del - Esercizi. Data la funzione di trasferimento G(s) = s (s +),sicalcoli a) La risposta impulsiva g(t); b) L equazione differenziale associata al sistema G(s); c) Si commenti la stabilità del
Compito del - Esercizi. Data la funzione di trasferimento G(s) = s (s +),sicalcoli a) La risposta impulsiva g(t); b) L equazione differenziale associata al sistema G(s); c) Si commenti la stabilità del
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici Compito A 2 Aprile 2007 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si considerino
Prova scritta di Controlli Automatici Compito A 2 Aprile 2007 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si considerino
Controlli Automatici 2 13/07/05 Compito a
 Controlli Automatici 3/7/5 Compito a a) Data la funzione di trasferimento P (s) = (s+)(s+) (s+)s. a.) Si tracci il diagramma di Bode. a.) Si tracci il diagramma di Nyquist. Bode Diagram 5 Magnitude (db)
Controlli Automatici 3/7/5 Compito a a) Data la funzione di trasferimento P (s) = (s+)(s+) (s+)s. a.) Si tracci il diagramma di Bode. a.) Si tracci il diagramma di Nyquist. Bode Diagram 5 Magnitude (db)
Stabilità dei sistemi in retroazione. Diagrammi polari e teorema di Nyquist
 Stabilità dei sistemi in retroazione Diagrammi polari e teorema di Nyquist STABILITA DEI SISTEMI IN RETROAZIONE Vogliamo studiare la stabilità del sistema in retroazione a partire della conoscenza di L(s
Stabilità dei sistemi in retroazione Diagrammi polari e teorema di Nyquist STABILITA DEI SISTEMI IN RETROAZIONE Vogliamo studiare la stabilità del sistema in retroazione a partire della conoscenza di L(s
Fondamenti di Automatica
 Fondamenti di Automatica (Prof. Rocco) Anno accademico 2016/2017 Appello del 23 Febbraio 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
Fondamenti di Automatica (Prof. Rocco) Anno accademico 2016/2017 Appello del 23 Febbraio 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 settembre 219 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 settembre 219 - Quiz Per ciascuno
Esercizio 1. (s 1) (s 0.5)(s 1) G(s) 28. p1 = -0.5 (sx) p2 = -1 (sx) Tipo: g=0. G(0) = 56 = 20log10(56) ~ 35 db
 (s 0.5)(s 1) G(s) 28. p1 = -0.5 (sx) p2 = -1 (sx) Tipo: g=0. G(0) = 56 = 20log10(56) ~ 35 db") Esercizio 1 2 G(s) 28 (s 1) (s.5)(s 1) Poli: p1 = -.5 p2 = -1 zeri: z1 = 1 (dx) Tipo: g= Guadagno: G() = 56 = 2log1(56) ~ 35 db Bode del Modulo 3 Scala 4 6 5 4 3 Magnitude (db) 2 1-1 -2 1.1.2.3 1 1 Piazzamento
Esercizio 1 2 G(s) 28 (s 1) (s.5)(s 1) Poli: p1 = -.5 p2 = -1 zeri: z1 = 1 (dx) Tipo: g= Guadagno: G() = 56 = 2log1(56) ~ 35 db Bode del Modulo 3 Scala 4 6 5 4 3 Magnitude (db) 2 1-1 -2 1.1.2.3 1 1 Piazzamento
B = Si studi, giustificando sinteticamente le proprie affermazioni, la stabilità del sistema. si A = G(s) = Y f (s) U(s) = 1.
 = Y f (s) U(s) = 1.") ESERCIZIO 1 Un sistema dinamico lineare invariante e a tempo continuo è descritto dall equazione differenziale che lega l ingresso all uscita:... y (t) + ÿ(t) + 4ẏ(t) + 4y(t) = u(t) 1. Si determinino le
ESERCIZIO 1 Un sistema dinamico lineare invariante e a tempo continuo è descritto dall equazione differenziale che lega l ingresso all uscita:... y (t) + ÿ(t) + 4ẏ(t) + 4y(t) = u(t) 1. Si determinino le
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 giugno 29 - Quiz Per ciascuno dei
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 giugno 29 - Quiz Per ciascuno dei
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/ giugno 2012
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 5 giugno 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 5 giugno 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
Esercizi per il corso di Fondamenti di Automatica (Mod. I) PARTE II
 PARTE II") Esercizi per il corso di Fondamenti di Automatica (Mod. I) PARTE II 20 dicembre 2018 Esercizio 1. (Stabilita ) Si consideri un sistema LTI retto dalla seguente f.d.t.: s + a s(s + b) 1. Si discuta la stabilità
Esercizi per il corso di Fondamenti di Automatica (Mod. I) PARTE II 20 dicembre 2018 Esercizio 1. (Stabilita ) Si consideri un sistema LTI retto dalla seguente f.d.t.: s + a s(s + b) 1. Si discuta la stabilità
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 212/13 9 novembre 212 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Fondamenti di Controlli Automatici - A.A. 212/13 9 novembre 212 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Controlli Automatici L-B - Cesena Compito del 28 maggio Domande teoriche
 Compito del 8 maggio 3 - Domande teoriche Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte corrette, e si considerano
Compito del 8 maggio 3 - Domande teoriche Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte corrette, e si considerano
Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 2006
 Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 26 Numero di matricola = 1α 1 = 1β 1 Si consideri lo schema di azionamento di una valvola rotativa riportato in fig1 Il sistema è costituito da tre
Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 26 Numero di matricola = 1α 1 = 1β 1 Si consideri lo schema di azionamento di una valvola rotativa riportato in fig1 Il sistema è costituito da tre
Il luogo delle radici
 Il luogo delle radici Andrea Munafò Università di Pisa April 14, 2012 Luogo delle radici (Evans 1948) Il luogo delle radici è uno strumento grafico per l analisi e la sintesi di sistemi di controllo a
Il luogo delle radici Andrea Munafò Università di Pisa April 14, 2012 Luogo delle radici (Evans 1948) Il luogo delle radici è uno strumento grafico per l analisi e la sintesi di sistemi di controllo a
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 28 giugno 2018 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie di lamiere,
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 28 giugno 2018 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie di lamiere,
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
SOLUZIONE della Prova TIPO E per:
 SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 CFU): 6 degli 8 esercizi numerici + 4 delle 5 domande a risposta multipla (v. ultime due pagine) NOTA: nell effettiva prova d esame
SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 CFU): 6 degli 8 esercizi numerici + 4 delle 5 domande a risposta multipla (v. ultime due pagine) NOTA: nell effettiva prova d esame
Esame di Regolazione e Controllo
 Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Criterio di stabilità di Bode. tramite la risposta in frequenza viene indicata come condizione di innesco dell instabilità la
 Criterio di stabilità di Bode Sia dato un sistema retroazionato con f.d.t. espressa da: F s = G(s) + G s H(s) tramite la risposta in frequenza viene indicata come condizione di innesco dell instabilità
Criterio di stabilità di Bode Sia dato un sistema retroazionato con f.d.t. espressa da: F s = G(s) + G s H(s) tramite la risposta in frequenza viene indicata come condizione di innesco dell instabilità
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici - Prima parte 18 Aprile 216 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti
Controlli Automatici - Prima parte 18 Aprile 216 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 218 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 218 - Quiz Per ciascuno
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) (A.A. fino al 2017/2018) SOLUZIONE
 (A.A. fino al 2017/2018) SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) (A.A. fino al 2017/2018) Prova scritta 7 giugno 2019 SOLUZIONE ESERCIZIO 1. Si consideri il problema della regolazione di quota dell aerostato ad aria calda mostrato
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) (A.A. fino al 2017/2018) Prova scritta 7 giugno 2019 SOLUZIONE ESERCIZIO 1. Si consideri il problema della regolazione di quota dell aerostato ad aria calda mostrato
Progetto del controllore
 Parte 10, 1 - Problema di progetto Parte 10, 2 Progetto del controllore Il caso dei sistemi LTI a tempo continuo Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Parte 10, 1 - Problema di progetto Parte 10, 2 Progetto del controllore Il caso dei sistemi LTI a tempo continuo Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
rapporto tra ingresso e uscita all equilibrio.
 Sistemi Dinamici: Induttore: Condensatore: Massa: Oscillatore meccanico: Pendolo: Serbatoio cilindrico: Serbatoio cilindrico con valvola d efflusso: Funzione di Trasferimento: Stabilità del sistema: (N.B.
Sistemi Dinamici: Induttore: Condensatore: Massa: Oscillatore meccanico: Pendolo: Serbatoio cilindrico: Serbatoio cilindrico con valvola d efflusso: Funzione di Trasferimento: Stabilità del sistema: (N.B.
ANALISI FREQUENZIALE E CARATTERISTICHE DEI SISTEMI IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale ANALISI FREQUENZIALE E CARATTERISTICHE DEI SISTEMI IN RETROAZIONE Ing. Luigi Biagiotti Tel. 051 2093034 / 051 2093068 email: lbiagiotti@deis.unibo.it
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale ANALISI FREQUENZIALE E CARATTERISTICHE DEI SISTEMI IN RETROAZIONE Ing. Luigi Biagiotti Tel. 051 2093034 / 051 2093068 email: lbiagiotti@deis.unibo.it
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici A 22 Giugno 11 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici A 22 Giugno 11 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
INGEGNERIA INFORMATICA
 ESERCIZIO Si consideri il seguente sistema S. INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 7/06/09 Prof. Marcello Farina TESTO DEGLI ESERCIZI E SOLUZIONI x = u (sin(πx)) A. Si scrivano le equazioni
ESERCIZIO Si consideri il seguente sistema S. INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 7/06/09 Prof. Marcello Farina TESTO DEGLI ESERCIZI E SOLUZIONI x = u (sin(πx)) A. Si scrivano le equazioni
Cognome Nome Matricola Corso di Laurea
 Fondamenti di Controlli Automatici A.A. 213/14 7 gennaio 215 Quiz di Teoria Cognome Nome Matricola Corso di Laurea Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici A.A. 213/14 7 gennaio 215 Quiz di Teoria Cognome Nome Matricola Corso di Laurea Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Precisione in regime permanente
 Regime permanente e transitorio Reiezione di disturbi in regime permanente Risposta transitoria e risposta in frequenza Reiezione di disturbi a banda larga Esempi di analisi e simulazione 2 27 Politecnico
Regime permanente e transitorio Reiezione di disturbi in regime permanente Risposta transitoria e risposta in frequenza Reiezione di disturbi a banda larga Esempi di analisi e simulazione 2 27 Politecnico
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello dell 8 luglio 2008: testo e soluzione
 Appello dell 8 luglio 2008: testo e soluzione") AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello dell 8 luglio 8: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema con ingresso u ed uscita y descritto dalle seguenti equazioni:
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello dell 8 luglio 8: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema con ingresso u ed uscita y descritto dalle seguenti equazioni:
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 6/7 Marzo 7 - Esercizi Compito B Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t) = sin(3
Fondamenti di Controlli Automatici - A.A. 6/7 Marzo 7 - Esercizi Compito B Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t) = sin(3
a.a. 2014/2015 Docente: Stefano Bifaretti
 a.a. 2014/2015 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Un sistema di controllo automatico è un sistema in grado di imporre a una o più variabili controllate (uscite) gli andamenti temporali
a.a. 2014/2015 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Un sistema di controllo automatico è un sistema in grado di imporre a una o più variabili controllate (uscite) gli andamenti temporali
Controlli Automatici LA Prova del 24/10/2006 gruppo A
 Cognome Nome Matr. 3 - - -3-9 45 Dato l impianto G(s) con: 8(s + 3) s(s + 8)(s + 5)(s + ) ) si traccino i diagrammi di Bode asintotici dei termini elementari e della funzione di trasferimento (indicandola
Cognome Nome Matr. 3 - - -3-9 45 Dato l impianto G(s) con: 8(s + 3) s(s + 8)(s + 5)(s + ) ) si traccino i diagrammi di Bode asintotici dei termini elementari e della funzione di trasferimento (indicandola
Il Criterio di Nyquist
 Il Criterio di Nyquist (vedi Marro Par. 4.5 a 4.7 e 4.9 vedi Vitelli-Petternella Par. VIII., VIII.4 Num_Den9_n.vi realizzato con Labview) Come determinare la stabilità a ciclo chiuso dalle caratteristiche
Il Criterio di Nyquist (vedi Marro Par. 4.5 a 4.7 e 4.9 vedi Vitelli-Petternella Par. VIII., VIII.4 Num_Den9_n.vi realizzato con Labview) Come determinare la stabilità a ciclo chiuso dalle caratteristiche
Regime permanente e transitorio
 Regime permanente e transitorio Precisione in regime permanente Segnali canonici di riferimento: polinomiali e sinusoidali Inseguimento di segnali polinomiali Inseguimento di segnali sinusoidali Implicazioni
Regime permanente e transitorio Precisione in regime permanente Segnali canonici di riferimento: polinomiali e sinusoidali Inseguimento di segnali polinomiali Inseguimento di segnali sinusoidali Implicazioni
INGEGNERIA INFORMATICA
 INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 21/09/2016 - Soluzioni Prof Marcello Farina Anno Accademico 2015/2016 ESERCIZIO 1 Si consideri il sistema descritto dalle seguenti equazioni: A Spiegare
INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 21/09/2016 - Soluzioni Prof Marcello Farina Anno Accademico 2015/2016 ESERCIZIO 1 Si consideri il sistema descritto dalle seguenti equazioni: A Spiegare
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Diagrammi di Bode Risposta in frequenza Rappresentazione grafica naturale Rappresentazione grafica modificata Diagrammi di Bode di fdt elementari Esempio
Stabilità dei sistemi di controllo in retroazione Diagrammi di Bode Risposta in frequenza Rappresentazione grafica naturale Rappresentazione grafica modificata Diagrammi di Bode di fdt elementari Esempio
INGEGNERIA DELLE TELECOMUNICAZIONI
 INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME E SOLUZIONI 20 settembre 2013 Anno Accademico 2012/2013 ESERCIZIO 1 Si consideri il sistema descritto dalle
INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME E SOLUZIONI 20 settembre 2013 Anno Accademico 2012/2013 ESERCIZIO 1 Si consideri il sistema descritto dalle
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Diagrammi di Bode Risposta in frequenza Rappresentazione grafica naturale Rappresentazione grafica modificata Diagrammi di Bode di fdt elementari Esempio
Stabilità dei sistemi di controllo in retroazione Diagrammi di Bode Risposta in frequenza Rappresentazione grafica naturale Rappresentazione grafica modificata Diagrammi di Bode di fdt elementari Esempio
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Analisi dei sistemi in retroazione
 Facoltà di Ingegneria di Reggio Emilia Corso di Controlli Automatici Corsi di laurea in Ingegneria Meccatronica ed in Ingegneria della Gestione Industriale Ing. Alessandro Macchelli e-mail: amacchelli@deis.unibo.it
Facoltà di Ingegneria di Reggio Emilia Corso di Controlli Automatici Corsi di laurea in Ingegneria Meccatronica ed in Ingegneria della Gestione Industriale Ing. Alessandro Macchelli e-mail: amacchelli@deis.unibo.it
Corso di laurea in Informatica. Regolatori. Marta Capiluppi Dipartimento di Informatica Università di Verona
 Corso di laurea in Informatica Regolatori Marta Capiluppi marta.capiluppi@univr.it Dipartimento di Informatica Università di Verona Scelta delle specifiche 1. Picco di risonanza e massima sovraelongazione
Corso di laurea in Informatica Regolatori Marta Capiluppi marta.capiluppi@univr.it Dipartimento di Informatica Università di Verona Scelta delle specifiche 1. Picco di risonanza e massima sovraelongazione
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 settembre 218 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 settembre 218 - Quiz Per ciascuno
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO. Schema generale di controllo in retroazione. Margine di guadagno e margine di fase
 ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici - Prima parte Aprile 8 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.) Calcolare la trasformata di Laplace X(s) dei seguenti
Controlli Automatici - Prima parte Aprile 8 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.) Calcolare la trasformata di Laplace X(s) dei seguenti
Regolazione e Controllo dei Sistemi Meccanici
 Regolazione e Controllo dei Sistemi Meccanici 9--9 A Si consideri la risposta a gradino unitario riportata in figura e si determini qualitativamente la funzione di trasferimento G(s) del sistema che la
Regolazione e Controllo dei Sistemi Meccanici 9--9 A Si consideri la risposta a gradino unitario riportata in figura e si determini qualitativamente la funzione di trasferimento G(s) del sistema che la
Controlli Automatici LA Prova del 10/12/2004 Gruppo a
 Cognome Nome Matr. Controlli Automatici LA Prova del //4 Gruppo a Indicare a quale o a quali delle f.d.t. indicate possono corrispondere le seguenti risposte al gradino unitario 3.8.7.56.4.8.4 Amplitude
Cognome Nome Matr. Controlli Automatici LA Prova del //4 Gruppo a Indicare a quale o a quali delle f.d.t. indicate possono corrispondere le seguenti risposte al gradino unitario 3.8.7.56.4.8.4 Amplitude
FORMULARIO DI CONTROLLI AUTOMATICI
 FORMULARIO DI CONTROLLI AUTOMATICI Sistema x (t) = A x (t) + B u (t) y (t) = C x (t) + D u (t) Funzione di trasferimento G (s) = y (s) / u (s) = C (si A) -1 B + D Sistema Serie G (s) = i G i (s) prodotto
FORMULARIO DI CONTROLLI AUTOMATICI Sistema x (t) = A x (t) + B u (t) y (t) = C x (t) + D u (t) Funzione di trasferimento G (s) = y (s) / u (s) = C (si A) -1 B + D Sistema Serie G (s) = i G i (s) prodotto
Controllo in retroazione: Progetto e Sintesi Regolatori. Prof. Laura Giarré
 Controllo in retroazione: Progetto e Sintesi Regolatori Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Regolatori standard Alcune strutture standard di regolatori reti correttrici
Controllo in retroazione: Progetto e Sintesi Regolatori Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Regolatori standard Alcune strutture standard di regolatori reti correttrici
CONCETTO DI STABILITÀ NEI SISTEMI DI CONTROLLO. Sistema in condizioni di equilibrio a t = 0. d(t) = 0. u(t) = 0. y(t) = 0. Sistema
 = 0. u(t) = 0. y(t) = 0. Sistema") CONCETTO DI STABILITÀ NEI SISTEMI DI CONTROLLO Sistema in condizioni di equilibrio a t = 0. d(t) = 0 u(t) = 0 Sistema y(t) = 0 Tipi di perturbazione. Perturbazione di durata limitata: u(t) = 0, t > T u
CONCETTO DI STABILITÀ NEI SISTEMI DI CONTROLLO Sistema in condizioni di equilibrio a t = 0. d(t) = 0 u(t) = 0 Sistema y(t) = 0 Tipi di perturbazione. Perturbazione di durata limitata: u(t) = 0, t > T u
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Funzioni di trasferimento: esercizi sulla rappresentazione della risposta in frequenza
 Funzioni di trasferimento: esercizi sulla rappresentazione della risposta in frequenza Si considerino le seguenti funzioni di trasferimento: ( s + s ( s + s ( s) = ( s) = (s + )( s 9s + ) (s + )( s +.9s
Funzioni di trasferimento: esercizi sulla rappresentazione della risposta in frequenza Si considerino le seguenti funzioni di trasferimento: ( s + s ( s + s ( s) = ( s) = (s + )( s 9s + ) (s + )( s +.9s
Controllo in retroazione: Analisi e Sensitività. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Controllo in retroazione: Analisi e Sensitività Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Progetto Reti Correttrici CA 217 218 Prof. Laura Giarré 2 Regolatori standard
Controllo in retroazione: Analisi e Sensitività Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Progetto Reti Correttrici CA 217 218 Prof. Laura Giarré 2 Regolatori standard
Diagrammi di Bode. Lezione 16 1
 Diagrammi di Bode Lezione 16 1 Funzione di trasferimento da considerare Tracciare il diagramma di Bode (solo spettro di ampiezza) della funzione di trasferimento: H() s = Punti critici: ss ( + 500) ( s+
Diagrammi di Bode Lezione 16 1 Funzione di trasferimento da considerare Tracciare il diagramma di Bode (solo spettro di ampiezza) della funzione di trasferimento: H() s = Punti critici: ss ( + 500) ( s+
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/ gennaio 2013
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 14 gennaio 2013 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 14 gennaio 2013 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello del 4 luglio 2006: testo e soluzione
 Appello del 4 luglio 2006: testo e soluzione") AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello del 4 luglio 26: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema con ingresso u ed uscita y descritto dalle seguenti equazioni:
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello del 4 luglio 26: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema con ingresso u ed uscita y descritto dalle seguenti equazioni:
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Appello del 24 Settembre 2015
 a.a Prof. Silvia Strada Appello del 24 Settembre 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Appello del 24 Settembre 2015 Nome e Cognome:........................... Matricola...........................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Appello del 24 Settembre 2015 Nome e Cognome:........................... Matricola...........................
Esame scritto di: Sistemi a Controreazione N.O.
 Esercizi d esame Esame scritto di: Sistemi a Controreazione N.O. Esercizio N Per il seguente sistema: P s s.5 s( s ) s. Determinare i valori di K per i quali il sistema K P (s) in retroazione unitaria
Esercizi d esame Esame scritto di: Sistemi a Controreazione N.O. Esercizio N Per il seguente sistema: P s s.5 s( s ) s. Determinare i valori di K per i quali il sistema K P (s) in retroazione unitaria
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 29 - Quiz Per ciascuno dei
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 29 - Quiz Per ciascuno dei
Esercitazione 09: Prestazioni dei sistemi di controllo
 3 maggio 29 (3h) Fondamenti di Automatica Prof. M. Farina Responsabile delle esercitazioni: Enrico Terzi Queste dispense sono state scritte e redatte dal Prof. Alessandro Papadopoulos, Mälardalen University
3 maggio 29 (3h) Fondamenti di Automatica Prof. M. Farina Responsabile delle esercitazioni: Enrico Terzi Queste dispense sono state scritte e redatte dal Prof. Alessandro Papadopoulos, Mälardalen University
Progetto del controllore
 Parte 10, 1 Progetto del controllore Il caso dei sistemi LTI a tempo continuo - Problema di progetto Parte 10, 2 Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Parte 10, 1 Progetto del controllore Il caso dei sistemi LTI a tempo continuo - Problema di progetto Parte 10, 2 Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Studio di sistemi dinamici tramite FdT. Risposta transitoria e risposta a regime
 Parte 8, 1 Studio di sistemi dinamici tramite FdT Risposta transitoria e risposta a regime Parte 8, 2 Alcune definizioni e richiami! Consideriamo un sistema LTI, a tempo continuo oppure a tempo discreto,
Parte 8, 1 Studio di sistemi dinamici tramite FdT Risposta transitoria e risposta a regime Parte 8, 2 Alcune definizioni e richiami! Consideriamo un sistema LTI, a tempo continuo oppure a tempo discreto,
Alcune definizioni e richiami. Studio di sistemi dinamici tramite FdT. Risposta transitoria e risposta a regime
 Parte 8, 1 Parte 8, 2 Alcune definizioni e richiami Studio di sistemi dinamici tramite FdT Risposta transitoria e risposta a regime Consideriamo un sistema LTI, a tempo continuo oppure a tempo discreto,
Parte 8, 1 Parte 8, 2 Alcune definizioni e richiami Studio di sistemi dinamici tramite FdT Risposta transitoria e risposta a regime Consideriamo un sistema LTI, a tempo continuo oppure a tempo discreto,
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 8 giugno 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 8 giugno 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Controllo in retroazione: Analisi e Sensitività. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Controllo in retroazione: Analisi e Sensitività Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Schema di riferimento per il controllo in retroazione Come già visto lo schema
Controllo in retroazione: Analisi e Sensitività Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Schema di riferimento per il controllo in retroazione Come già visto lo schema
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Dicembre 29 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere V e quali sono
Prova scritta di Controlli Automatici - Compito A 21 Dicembre 29 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere V e quali sono