FORM FINDIG E OTTIMIZZAZIONE DEL BUCKLING DI GRID SHELLS CON L UTILIZZO DI ALGORITMI GENETICI
|
|
|
- Tommaso Gasparini
- 8 anni fa
- Visualizzazioni
Transcript
1 FORM FINDIG E OTTIMIZZAZIONE DEL BUCKLING DI GRID SHELLS CON L UTILIZZO DI ALGORITMI GENETICI

2 GRID SHELL /// 01 Una grid shell (gitterschale in tedesco) è una struttura di barre, curva nello spazio. Le barre formano una griglia piana con maglia rettangolare e distanza costante tra ciascun nodo. La forma della grid shell è ottenuta per inversione di una rete sospesa. Nel modo in cui una griglia sospesa dà la curva ideale di un arco senza flessione, così l inversione della rete conduce ad una forma funicolare nella quale il grid shell non presenta flessione. Schlaich Bergermann und Parterners, Swimming Bath Aquatoll, Neckarsulm, 1989 FREI OTTO RFR, Copertura del chiostro dell abbazia di Neumunster, Neumunster, 2002 Frei Otto, Multihalle Exhibition Garden, Mennheim, 1968

3 FORM-FINDING /// 02 La catenaria è la curva secondo cui si dispone una fune che supponiamo omogenea, flessibile e non estendibile, appesa a due punti estremi, che sia lasciata pendere soggetta soltanto al proprio peso. Invertendo tale forma, in considerazione del fatto che una catenaria ha la proprietà di avere in ogni suo punto una distribuzione uniforme del suo peso totale, si ottiene una geometria resistente per forma. catenaria invertita catenaria Lo stesso principio può essere adottato per ottenere delle geometrie più complesse. Partendo da una maglia piana deformabile, vincolata opportunatamente, sottoposta alla forza di gravità, si ottiene una geometria che, se invertita, corrisponde alla funicolare del sistema di forze relativo alla particolare combinazione di carichi introdotta nel modello.

4 FORM-FINDING /// 03 Antonio Gaudi, Colonia Güell Heinz Isler: modelli fisici per l inversione delle membrane tese (sinistra) Deitingen Service Station, Deitingen, Svizzera, 1968 (destra) Frei Otto, Multihalle Exhibition Garden, Mennheim, 1968
 Frei Otto, Multihalle Exhibition Garden,")
5

6 Prestress Force Form-Finding FORM-FINDING /// 05 Il Prestress Force Form-Finding è una metodologia utilizzata dallo studio RFR per la progettazione della copertura della corte dell abbazia di Neumunster. Il processo si può riassumere nei seguenti punti: 1. Definizione della griglia strutturale piana e dei carichi nodali E = 0.05 N/mm 2 2. Definizione degli elementi e di un modulo di elasticità ridotto 3. Definizione della pretensione negli elementi 4. Analisi della struttura attraverso il solutore GSARelax del software Oasys GSA 5. Generazione della nuova struttura e della condizione di carico che permette l equilibrio

7 Le grid shells sono strutture che fanno fronte ai carichi esterni principalmente attraverso sforzi di compressione. Pertanto la verifica della stabilità risulta, spesso, il parametro dominante per la progettazione strutturale di queste opere. Le tipologie di collasso per instabilità delle grid shells si possono riassumere come segue [Bulenda Th., Knippers J., 2001]: SNAP THROUGH (a) BUCKLING /// 06 P (b) R/EA C 0 0 C instabilità del singolo elemento: si instabilizza un solo elemento senza coinvolgere il resto della struttura; N A a b 1 f f 0 B N 0 C 1 instabilità locale: il fenomeno di snap-through; (a) P instabilità globale: si instabilizza tutta la struttura. Questa modalità di collasso è paragonabile al buckling globale di un guscio continuo; C 0 A N combinazioni dei precedenti modi: le grid shell 1 sono ottimizzate nei confronti dei carichi che portano a diverse modalità di collasso. Questo vuol dire che varie modalità di collasso possono avvenire per lo stesso livello di carico. Si deve quindi prestare C attenzione anche all interazione di modi che di per sé non 1 sono pericolosi ma che combinandosi possono portare al collasso della struttura. 0 a b C f f 0 B N (b) Lo snap through è un fenomeno di instabilità locale che porta ad una configurazione ribaltata della struttura. Il passaggio tra la geometria iniziale e quella ribaltata avviene in maniera R/EA repentina con un rilascio dell energia a snap-through cinetica immagazzinata che si trasforma Area A in un azione impulsiva b che coinvolge 1 0 w/f gli elementi adiacenti al nodo dove lo snap through si è manifestato. Se l energia rilasciata è elevata, si accentua l effetto dinamico che coinvolge i nodi adiacenti, trasformando l instabilità locale in una più pericolosa instabilità globale che può portare al collasso dell intera struttura o di una larga parte di essa [Gioncu V., Lenza P., 1993].
 BUCKLING /// 06 P (b) R/EA C 0 0 C instabilità del singolo elemento: si instabilizza un solo elemento senza coinvolgere il resto della struttura; N A a b 1 f f 0 B N 0 C 1")
8 BKL. vs F.F. /// 07 IL FORM FINDING CON PRESTRESS UNIFORME GENERA UNA STRUTTURA OTTIMALE PER IL BUCKLING? ESISTE UN MODO PER INIZIALIZZARE IL PRESTRESS IN MODO DA OTTENERE UNA STRUT- TURA OTTIMA DAL PUTNO DI VISTA DELL INSTABILITÀ? È POSSIBILE SVILUPPARE UNA PROCEDURA CHE CONSENTA DI CONIUGARE FORM-FIN- DING E BUCKLING PER LA PROGETTAZIONE DI GRIDSHELLS?

9 Non è la specie più forte a sopravvivere, né la più intelligente, ma quella più pronta al cambiamento. G.A. /// 08 [Charles Darwin] Un algoritmo genetico è un algoritmo di ottimizzazione basato su un metodo euristico ispirato al principio della selezione naturale. I principi fondamentali su cui si basa la selezione naturale sono: il principio della variabilità dei caratteri tra gli individui di una popolazione; il principio dell adattamento, secondo il quale gli individui che presentano caratteri vantaggiosi ai fini della sopravvivenza sono i più adatti (fit) all ambiente; il principio dell ereditarietà dei caratteri tra genitori e figli. L idea che sta alla base di un algoritmo genetico è quella di, partendo da un insieme iniziale di possibili soluzioni (individui) per un determinato problema, selezionare le migliori e ricombinarle fra di loro in modo tale che esse evolvano verso un punto di ottimo (massimo o minimo). Per formulare un problema in termini genetici si deve: determinazione dello schema di rappresentazione; determinazione della funzione di fitness TERMINOLOGIA D E F I N I Z I O N E codice genetico componente di un cromosoma possibili varianti di un gene posizione di un gene nel cromosoma informazione genetica completa insieme dei geni contenuti in un genoma insieme di tutte le caratteristiche osservabili in un individuo ricombinazione dei geni durante la riproduzione alterazione casuale di un cromosoma grado di adattabilità di un individuo B I O L O G I A CROMOSOMA GENE ALLELE LOCUS GENOMA GENOTIPO FENOTIPO CROSSOVER MUTAZIONE FITNESS determinazione dei parametri e delle variabili per controllare l algoritmo; determinazione del criterio di arresto dell algoritmo.
 all ambiente; il principio dell ereditarietà dei caratteri tra genitori e figli.")
10 Schema di rappresentazione Lo schema di rappresentazione non è altro il processo che porta alla definizione delle variabili del problema, inclusa la definizione di un possibile spazio di ricerca della soluzione. G.A. /// 09 CODIFICA BINARIA CROMOSOMA [A] CROMOSOMA [B] CODIFICA VALORI REALI CROMOSOMA [A] CROMOSOMA [B] CROMOSOMA [C] A B D J E I F J D H D I E R J F D L K F G T N L T Y (back), (back), (right), (forward), (left)
![/// 09 CODIFICA BINARIA CROMOSOMA [A] CROMOSOMA [B] 0 1 1 0 1 0 0 1 0 1 0 0 1 1 0 0 0 1 1 1 0 0 1 1 CODIFICA VALORI REALI](/docs-images/42/211570/images/page_10.jpg "CROMOSOMA [A] CROMOSOMA [B] CROMOSOMA [C] 1.235 5.324 0.455 2.329 2.454 6.764 3.103 3.")
11 Definizione Fitness Function La fitness function è la funzione obiettivo che l algoritmo genetico deve massimizzare o minimizzare. Ad ogni individuo avrà una propria funzione di fitness attraverso la quale sarà valutata la sua bontà. Si supponga, per esempio, che la funzione di fitness F dipenda dal vettore p composto da n variabili: min F = f( p), con p= ( p,..., p ), per p p p 1 max n n n n BACINO DI ATTRAZIONE G.A. /// 10 Per un sistema dinamico, un bacino di attrazione è il più grande intorno U di un attrattore x 0, tale che ogni orbita x(t), che parte da un punto interno a U, evolve verso x 0. Nel caso specifico, gli attrattori sono rappresentati dai picchi del fitness landscape. L ottimizzazione farà evolvere le soluzioni di p massimizzando (o minimizzando) il valore della fitness function F: min max[min] F = f( p ), in p p p max n n n FITNESS LANDSCAPE Il fitness landscape è la rappresentazione grafica della funzione di fitness. fitness landscape della funzione f(x,y) = sin(x) - cos(y)
, che parte da un punto interno a U, evolve verso x 0.")
12

13 Parametri di controllo G.A. /// 12 P O P O L A T I O N S I Z E N U M B E R O F G E N E R A T I O N S non specificato C R O S S O V E R R A T E (80%- 90%) M U T A T I O N R A T E (0.5% - 1%) Criteri di arresto TEMPO DI EVOLUZIONE NUMERO DI GENERAZIONI CONVERGENZA DELLA POPOLAZIONE CONVERGENZA DELLA FITNESS CONVERGENZA DEL VALORE MIGLIORE DELLA FITNESS L algoritmo si arresta quando il tempo di evoluzione, imposto dall utilizzatore, viene raggiunto. L algoritmo si arresta quando il numero massimo di generazioni viene raggiunto. L algoritmo si arresta quando una popolazione converge. La convergenza di una popolazione può essere stimata in vari modi come ad esempio verificando l uguaglianza, in termini di massima minima e media fitness, fra la popolazione corrente e la popolazione allo step successivo oppure controllando che la fitness media della popolazione corrente sia inferiore ad una percentuale della fitness massima definita dall utente. L algoritmo si arresta, ad esempio, quando i valori massimi minimi e medi della fitness function per la popolazione corrente si eguagliano. L algoritmo si arresta, ad esempio, quando il valore grezzo (non scalato) della funzione di fitness è uguale ad un valore definito dall utente.

14

15

16
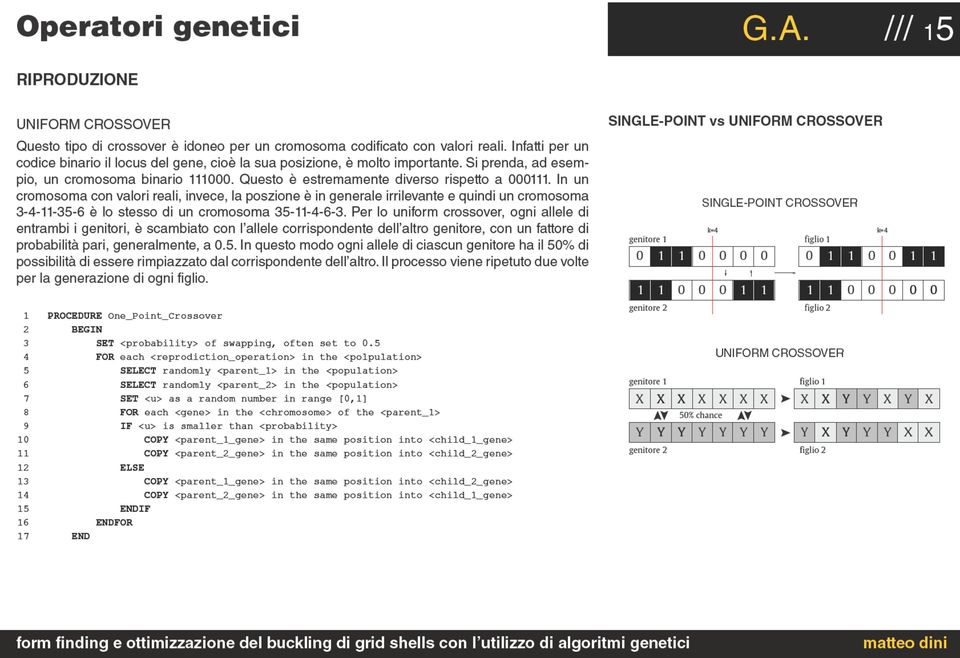
17 Operatori genetici G.A. /// 16 MUTAZIONE L operatore di mutazione provoca una variazione genetica nel cromosoma degli individui di una popolazione. Al contrario dell operatore di crossover, che è considerato un costruttore di nuovi candidati alla soluzione finale, la mutazione è considerata com un distruttore della configurazione esistente. Per questa regione, gioca un ruolo secondario nel processo genetico. Infatti le mutazioni sono inserite allo scopo di evitare, ad esempio, che tutti gli individui siano uguali e quindi che che la possibilità di evoluzione si arresti in un ottimo locale. 1 PROCEDURE One_Point_Crossover 2 BEGIN 3 SET <probability> of swapg, often set to FOR each <reprodiction_operation> in the <polpulation> 5 SELECT randomly <parent_1> in the <population> 6 SELECT randomly <parent_2> in the <population> 7 SET <u> as a random number in range [0,1] 8 FOR each <gene> in the <chromosome> of the <parent_1> 9 IF <u> is smaller than <probability> 10 COPY <parent_1_gene> in the same position into <child_1_gene> 11 COPY <parent_2_gene> in the same position into <child_2_gene> 12 ELSE 13 COPY <parent_1_gene> in the same position into <child_2_gene> 14 COPY <parent_2_gene> in the same position into <child_1_gene> 15 ENDIF 16 ENDFOR 17 END cromosoma originale cromosoma mutato X X X X X X X X X X X X Y X mutazione con p% di possibilità Y nuovo valore random

18
19

20

21 Semplice Algoritmo Genetico G.A. /// 20 CONFRONTO GALAPAGOS vs. PYEVOLVE ALGORITMO GENETICO TEMPO DI ESECUZIONE [s] CRITERIO DI ARRESTO Galapagos stagnant iterations (50) PyEvolve GA_ numero generazioni (100) PyEvolve GA_ numero generazioni (100) PyEvolve GA_ convergenza popolazione PyEvolve GA_ convergenza popolazione
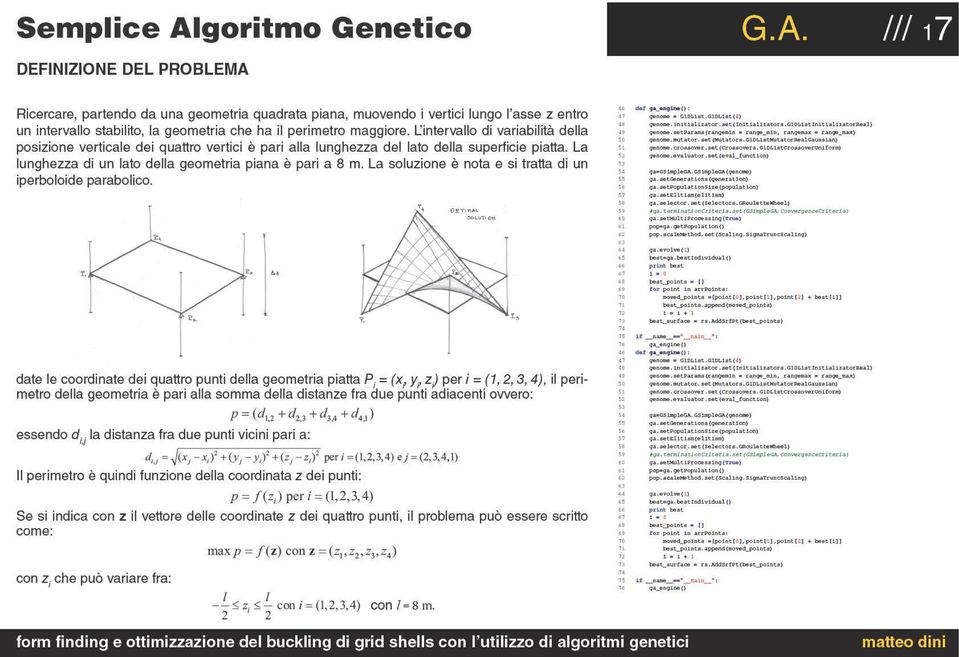
22 Form-Finding e Buckling DEFINIZIONE DEL PROBLEMA Il problema studiato consiste nel ricercare la forma, attraverso un processo di formfinding, che sia ottimizzata nei confronti del buckling. Le diverse geometrie vengono generate cambiando il prestress negli elementi che compongono la struttura. I valori che può assumere il prestress varia da 0.5 kn a 10 kn. Per poter confrontare le geometrie, l altezza massima è stata posta pari a 3 metri. Questo comporta la necessità di scalare il prestress fino a che la struttura non raggiunge l altezza ricercata. Una volta trovata la forma le proprietà degli elementi vengono cambiate impostando le sezioni reali e come materiale l acciaio e non più il materiale utilizzato per il form finding con il modulo di elasticità ridotto. La tipologia dei vincoli interni ed esterni viene scelta in base all analisi che si vuole effettuare. Si procede quindi all analisi di buckling con carichi nodali pari a quelli che hanno generato la struttura (1kN) che fornisce il valore del più basso carico critico di collasso. L algoritmo genetico deve massimizzare questo valore. Se indichiamo con p = (p1,p2,...,pn) il vettore del prestress virtuale per n elementi strutturali, l ottimizzazione fa evolvere le soluzioni per p massimizzando: OTTIMIZZAZIONE///21 form-finding struttura per il buckling max b( p) con p= ( p1, p2,..., p n ) In termini genetici si può dire che: max b( p) con p= ( p1, p2,..., p n ) è la FITNESS FUNCTION il vettore p = (p1,p2,...,pn) è il GENOMA LOAD FACTOR
23 OTTIMIZZAZIONE///22 PARAMETRI DELL ALGORITMO GENETICO CODIFICA Numeri Reali GENERAZIONI 50 POPLAZIONE 10 TIPO DI MUTAZIONE Gaussian Real Mutation PERCENTUALE DI MUTAZIONE 0.05 (5%) TIPO DI CROSSOVER Uniform Crossover PERCENTUALE DI CROSSOVER 0.50 (50%) N. DI INDIVIDUI ELTIE 1 TIPO DI SCALA DELLA FITNESS Sigma Trunc Scaling TIPO DI CONVERGENZA Numero generazioni/convergenza popolazione
24 MODELLAZIONE DELLA STRUTTURA IN GSA OTTIMIZZAZIONE///23 La modellazione della maglia strutturale piana è stata fatta in GSA in modo tale da facilitare l esecuzione delle procedure dell algoritmo. Le caratteristiche principali del modello sono: CARICHI NODALI PER IL FORM-FINDING: 1 kn DEFINIZIONE DELLE SEZIONI PER IL FORM FINDING E DI UN MATERIALE CON E = 0.05 N/mm 2 DIVISIONE DEGLI ELEMENTI IN GRUPPI SIMMETRICI PER L ASSEGNAZIONE DEL PRESTRESS DEFINIZIONE DELLE SEZIONI PER GLI ELEMENTI PER L ANALISI DI BUCKLING CARICHI NODALI PER IL BUCKLING: 1 kn
25 ALGORITMO DI BISEZIONE OTTIMIZZAZIONE///24 L algoritmo consente di trovare la radice di una funzione compresa in un intervallo [a,b] con a e b di segno opposto. 1 INPUT : Function f, endpoint values a, b, tolerance TOL, maximum iterations NMAX 2 CONDITIONS : a < b, either f(a) < 0 and f(b) > 0 or f(a) > 0 and f(b) < 0 3 OUTPUT : value which differs from a root of f(x)=0 by less than TOL 4 5 N = 1 6 WHILE N = NMAX 7 c = (a + b)/2 8 IF (f(c) = 0 OR (b a)/2 < TOL THEN { solution found 9 OUTPUT (c) IF sign(f(c)) = sign(f(a)) then a = c else b = c 12 N = N + 1 increment step counter OUTPUT ("Method failed.") max number of steps exceeded
26 OTTIMIZZAZIONE///25 ALGORITMO DI BISEZIONE: RICERCA DELL ALTEZZA Per la ricerca dell altezza si utilizza l algoritmo di bisezione in modo da scalare il prestress degli elementi fino a che non ri raggiunge l altezza cercata di 3 metri. 1. Definizione dell intervallo [a,b] 2. Form-finding con un prestress pari a: p * a e p * b 3. Calcolo dell altezza massima per le due geometrie trovate: h(a) e h(b) 4. Calcolo di f(a) e f(b) come: f(a) = h(a) - h f(b) = h(b) - h 5. Se f(a)*f(b)>0 si modifica l intervallo e si riparte dal punto 2 6. Calcolo di c: c = 0.5 * (a + b) 7. Calcolo di h(c) con un prestress p * c 8. Calcolo di f(c): f(c) = h(c) - h 9. Se f(c) < Tol allora c è il valore del prestress che mi consente di avere un altezza di 3 metri altrimenti: se f(c) * f(b) > 0 pongo a = c e riparto dal punto 7 se f(c) * f(a) > 0 pongo b = c e riparto dal punto 7 1 def bisection(a, b, arrprestress, target_heigth, path1, path2, tol = 5.0e-3): 2 3 arrps_a = [] 4 arrps_b = [] 5 6 for ps in arrprestress: 7 arrps_a.append(a * ps) 8 for ps in arrprestress: 9 arrps_b.append(b * ps) heigth_a = heigth(path1,path2,arrps_a) 14 fa = heigth_a - target_heigth heigth_b = heigth(path1,path2,arrps_b) 17 fb = heigth_b - target_heigth if fa == 0.0 : return path2 20 if fb == 0.0 : return path if fa * fb > 0.0: 23 arrprestress = [] 24 b = b for ps in arrprestress: 26 arrps_b.append(b * ps) 27 heigth_b = heigth(path1,path2,arrps_b) n = ceil(log(abs(a - b) / tol) / log(2)) for i in range(int(n)): 32 c = 0.5 * (a + b) 33 arrps_c = [] 34 for ps in arrprestress: 35 arrps_c.append(c * ps) heigth_c = heigth(path1,path2,arrps_c) 38 fc = heigth_c - target_heigth 39 if abs(fc) < tol: return path2 40 if fb * fc < 0.0: a = c 41 else: b = c return path2
27 CALCOLO DEL FATTORE DI BUCKLING OTTIMIZZAZIONE///26 Il fattore di buckling viene calcolato su una geometria deformata. L algoritmo per il calcolo è il seguente: 1. Calcolo del primo modo di buckling EV1 per la condizione di carico che ha generato la forma 2. Calcolo della nuova condizione di carico pari a: 0.8 * EV1 3. Analisi non lineare con la nuova condizione di carico e definizone della nuova geometria deformata 4. Calcolo del primo modo di buckling EV2 per la geometria deformata 5. Calcolo del fattore di buckling per la struttura pari a: (0.8 * EV1) * (EV2)
28
29 DIRECTION 2: area=a/10 DIRECTION 1: aera=a/10 DIRECTION 2: area=a OTTIMIZZAZIONE///28 FLAT GEOMETRY ONE DIRECTION RESTRAINTS FORM FINDING SHAPE INTIAL RELEASES SECTIONS PRESTRESS DIRECTIONS GEOMETRY INITIALIZATION BEST SHAPE TWO DIRECTIONS THREE DIRECTIONS UNIFROM PRESTRESS DIRECTION 1: aera=a PIN ENCASTRE ENCASTRES PINS DIRECTIONS1PINS DIRECTIONS2 EQUAL ALL WAYS INITIAL SHAPE LOAD FACTOR BEST SHAPE LOAD FACTOR % % % % % % % % % % % % % % This part of matrix indicates how I put the prestress for the form-finding This part of matrix indicates the internal and external conditions for the buckling analysis for the form found shape
30 Risultati OTTIMIZZAZIONE///29 Il form finding effettuato con un prestress uniforme non genera la migliore geometria possibile nei confroti del bucklig Non esiste una relazione analitica tra i prestress per i vari elementi L algoritmo genetico produce notevoli miglioramenti per il fattore di buckling delle geometrie Dai risultati si nota come gli individui migliori presentino un prestress maggiore per gli elementi in angolo. Questo produce una curvatura inversa dell arco.
31 Futuri sviluppi OTTIMIZZAZIONE///30 Migliorare l efficienza dell algoritmo genetico in termini di tempo-macchina. Evitare la curvatura inversa degli archi agli angoli inserendo all interno del GA il calcolo della curvatura della geometria come ulteriore parametro di controllo. Sviluppare un MOGA in grado di poter valutare separatamente funzioni di fitness diverse Effettuare ulteriori test con metodi di form-finding diversi e con una distribuzione di prestress negli elementi diversa Effettuare test con maglie strutturali diverse e su diversi perimetri Ricercare, se possibile, un metodo nuovo di form-finding che tenga in conto da subito del fattore di buckling della struttura
Page 1. Evoluzione. Intelligenza Artificiale. Algoritmi Genetici. Evoluzione. Evoluzione: nomenclatura. Corrispondenze natura-calcolo
 Evoluzione In ogni popolazione si verificano delle mutazioni. Intelligenza Artificiale In un ambiente che varia, le mutazioni possono generare individui che meglio si adattano alle nuove condizioni. Questi
Evoluzione In ogni popolazione si verificano delle mutazioni. Intelligenza Artificiale In un ambiente che varia, le mutazioni possono generare individui che meglio si adattano alle nuove condizioni. Questi
Parte I. Prima Parte
 Parte I Prima Parte Capitolo 1 Introduzione generale 1.1 Il problema dell assegnazione Corsi-Borsisti Il problema dell assegnazione delle borse dei corsi ai vari studenti può essere riassunto nei punti
Parte I Prima Parte Capitolo 1 Introduzione generale 1.1 Il problema dell assegnazione Corsi-Borsisti Il problema dell assegnazione delle borse dei corsi ai vari studenti può essere riassunto nei punti
Introduzione agli Algoritmi Genetici Prof. Beatrice Lazzerini
 Introduzione agli Algoritmi Genetici Prof. Beatrice Lazzerini Dipartimento di Ingegneria della Informazione Via Diotisalvi, 2 56122 PISA ALGORITMI GENETICI (GA) Sono usati per risolvere problemi di ricerca
Introduzione agli Algoritmi Genetici Prof. Beatrice Lazzerini Dipartimento di Ingegneria della Informazione Via Diotisalvi, 2 56122 PISA ALGORITMI GENETICI (GA) Sono usati per risolvere problemi di ricerca
Introduzione agli Algoritmi Genetici Prof. Beatrice Lazzerini
 Introduzione agli Algoritmi Genetici Prof. Beatrice Lazzerini Dipartimento di Ingegneria della Informazione Via Diotisalvi, 2 56122 PISA ALGORITMI GENETICI (GA) Sono usati per risolvere problemi di ricerca
Introduzione agli Algoritmi Genetici Prof. Beatrice Lazzerini Dipartimento di Ingegneria della Informazione Via Diotisalvi, 2 56122 PISA ALGORITMI GENETICI (GA) Sono usati per risolvere problemi di ricerca
Riproduzione Crossover Mutazione
 Algoritmi Genetici Sono algoritmi di ricerca basati sui principi evolutivi della selezione naturale e della genetica, che implicano la sopravvivenza degli elementi migliori e lo scambio di informazioni
Algoritmi Genetici Sono algoritmi di ricerca basati sui principi evolutivi della selezione naturale e della genetica, che implicano la sopravvivenza degli elementi migliori e lo scambio di informazioni
Intelligenza Artificiale. Introduzione al calcolo evolutivo
 Intelligenza Artificiale Introduzione al calcolo evolutivo Marco Piastra Calcolo evolutivo - 1 Calcolo evolutivo ed IA Universe Borg Vogons Earth etc Biotop Society Stones & Seas etc Art Science Politics
Intelligenza Artificiale Introduzione al calcolo evolutivo Marco Piastra Calcolo evolutivo - 1 Calcolo evolutivo ed IA Universe Borg Vogons Earth etc Biotop Society Stones & Seas etc Art Science Politics
( x) ( x) 0. Equazioni irrazionali
 ( x) 0. Equazioni irrazionali") Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Corso di. Dott.ssa Donatella Cocca
 Corso di Statistica medica e applicata Dott.ssa Donatella Cocca 1 a Lezione Cos'è la statistica? Come in tutta la ricerca scientifica sperimentale, anche nelle scienze mediche e biologiche è indispensabile
Corso di Statistica medica e applicata Dott.ssa Donatella Cocca 1 a Lezione Cos'è la statistica? Come in tutta la ricerca scientifica sperimentale, anche nelle scienze mediche e biologiche è indispensabile
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
E mail: emadelmo@dicea.unifi.it Web: www.dicea.unifi.it/~emadelmo. Firenze, 12/03/2009
 www.dicea.unifi.it Anno accademico 2008/2009 Ingegneria Sismica CIS Emanuele Del Monte E mail: emadelmo@dicea.unifi.it Web: www.dicea.unifi.it/~emadelmo Firenze, 12/03/2009 PRIMA PARTE CARATTERISTICHE
www.dicea.unifi.it Anno accademico 2008/2009 Ingegneria Sismica CIS Emanuele Del Monte E mail: emadelmo@dicea.unifi.it Web: www.dicea.unifi.it/~emadelmo Firenze, 12/03/2009 PRIMA PARTE CARATTERISTICHE
Indice. pagina 2 di 10
 LEZIONE PROGETTAZIONE ORGANIZZATIVA DOTT.SSA ROSAMARIA D AMORE Indice PROGETTAZIONE ORGANIZZATIVA---------------------------------------------------------------------------------------- 3 LA STRUTTURA
LEZIONE PROGETTAZIONE ORGANIZZATIVA DOTT.SSA ROSAMARIA D AMORE Indice PROGETTAZIONE ORGANIZZATIVA---------------------------------------------------------------------------------------- 3 LA STRUTTURA
Ottimizzazione Multi Obiettivo
 Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
Algoritmi e strutture dati. Codici di Huffman
 Algoritmi e strutture dati Codici di Huffman Memorizzazione dei dati Quando un file viene memorizzato, esso va memorizzato in qualche formato binario Modo più semplice: memorizzare il codice ASCII per
Algoritmi e strutture dati Codici di Huffman Memorizzazione dei dati Quando un file viene memorizzato, esso va memorizzato in qualche formato binario Modo più semplice: memorizzare il codice ASCII per
Stimare il WCET Metodo classico e applicazione di un algoritmo genetico
 Stimare il WCET Metodo classico e applicazione di un algoritmo genetico Sommario Introduzione Definizione di WCET Importanza del WCET Panoramica dei classici metodi per calcolare il WCET [1] Utilizzo di
Stimare il WCET Metodo classico e applicazione di un algoritmo genetico Sommario Introduzione Definizione di WCET Importanza del WCET Panoramica dei classici metodi per calcolare il WCET [1] Utilizzo di
Esercizi Capitolo 6 - Alberi binari di ricerca
 Esercizi Capitolo 6 - Alberi binari di ricerca Alberto Montresor 23 settembre 200 Alcuni degli esercizi che seguono sono associati alle rispettive soluzioni. Se il vostro lettore PDF lo consente, è possibile
Esercizi Capitolo 6 - Alberi binari di ricerca Alberto Montresor 23 settembre 200 Alcuni degli esercizi che seguono sono associati alle rispettive soluzioni. Se il vostro lettore PDF lo consente, è possibile
e-dva - eni-depth Velocity Analysis
 Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
Prof. Giuseppe Chiumeo. Avete già studiato che qualsiasi algoritmo appropriato può essere scritto utilizzando soltanto tre strutture di base:
 LA STRUTTURA DI RIPETIZIONE La ripetizione POST-condizionale La ripetizione PRE-condizionale INTRODUZIONE (1/3) Avete già studiato che qualsiasi algoritmo appropriato può essere scritto utilizzando soltanto
LA STRUTTURA DI RIPETIZIONE La ripetizione POST-condizionale La ripetizione PRE-condizionale INTRODUZIONE (1/3) Avete già studiato che qualsiasi algoritmo appropriato può essere scritto utilizzando soltanto
f(x) = 1 x. Il dominio di questa funzione è il sottoinsieme proprio di R dato da
 = 1 x. Il dominio di questa funzione è il sottoinsieme proprio di R dato da") Data una funzione reale f di variabile reale x, definita su un sottoinsieme proprio D f di R (con questo voglio dire che il dominio di f è un sottoinsieme di R che non coincide con tutto R), ci si chiede
Data una funzione reale f di variabile reale x, definita su un sottoinsieme proprio D f di R (con questo voglio dire che il dominio di f è un sottoinsieme di R che non coincide con tutto R), ci si chiede
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
CONTINUITÀ E DERIVABILITÀ Esercizi proposti. 1. Determinare lim M(sinx) (M(t) denota la mantissa di t)
 (M(t) denota la mantissa di t)") CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
Computazione Naturale AA. 2011-2012
 Computazione Naturale AA. 2011-2012 Prof. Mario Pavone CdL Magistrale in Informatica Dip. Matematica ed Informatica mpavone@dmi.unict.it http://www.dmi.unict.it/mpavone/ INDICE Obiettivi formativi Cos
Computazione Naturale AA. 2011-2012 Prof. Mario Pavone CdL Magistrale in Informatica Dip. Matematica ed Informatica mpavone@dmi.unict.it http://www.dmi.unict.it/mpavone/ INDICE Obiettivi formativi Cos
4 3 4 = 4 x 10 2 + 3 x 10 1 + 4 x 10 0 aaa 10 2 10 1 10 0
 Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4: Ottimizzazione non lineare non vincolata parte II. E. Amaldi DEIB, Politecnico di Milano
 Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Indice di rischio globale
 Indice di rischio globale Di Pietro Bottani Dottore Commercialista in Prato Introduzione Con tale studio abbiamo cercato di creare un indice generale capace di valutare il rischio economico-finanziario
Indice di rischio globale Di Pietro Bottani Dottore Commercialista in Prato Introduzione Con tale studio abbiamo cercato di creare un indice generale capace di valutare il rischio economico-finanziario
La distribuzione Normale. La distribuzione Normale
 La Distribuzione Normale o Gaussiana è la distribuzione più importante ed utilizzata in tutta la statistica La curva delle frequenze della distribuzione Normale ha una forma caratteristica, simile ad una
La Distribuzione Normale o Gaussiana è la distribuzione più importante ed utilizzata in tutta la statistica La curva delle frequenze della distribuzione Normale ha una forma caratteristica, simile ad una
9. Urti e conservazione della quantità di moto.
 9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
Esercizi svolti. 1. Si consideri la funzione f(x) = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di
 = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di") Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Intelligenza Artificiale
 Intelligenza Artificiale Esercizi e Domande di Esame Tecniche di Ricerca e Pianificazione Esercizi Griglia Si consideri un ambiente costituito da una griglia n n in cui si muove un agente che può spostarsi
Intelligenza Artificiale Esercizi e Domande di Esame Tecniche di Ricerca e Pianificazione Esercizi Griglia Si consideri un ambiente costituito da una griglia n n in cui si muove un agente che può spostarsi
DEPLOY YOUR BUSINESS
 DEPLOY YOUR BUSINESS COS É ARROCCO? E uno strumento online per lo sviluppo del Piano Economico-Finanziario del Business Plan. Arrocco è uno strumento online appositamente progettato per lo sviluppo di
DEPLOY YOUR BUSINESS COS É ARROCCO? E uno strumento online per lo sviluppo del Piano Economico-Finanziario del Business Plan. Arrocco è uno strumento online appositamente progettato per lo sviluppo di
3 GRAFICI DI FUNZIONI
 3 GRAFICI DI FUNZIONI Particolari sottoinsiemi di R che noi studieremo sono i grafici di funzioni. Il grafico di una funzione f (se non è specificato il dominio di definizione) è dato da {(x, y) : x dom
3 GRAFICI DI FUNZIONI Particolari sottoinsiemi di R che noi studieremo sono i grafici di funzioni. Il grafico di una funzione f (se non è specificato il dominio di definizione) è dato da {(x, y) : x dom
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
STRATEGIA DI TRADING. Turning Points
 STRATEGIA DI TRADING Turning Points ANALISI E OBIETTIVI DA RAGGIUNGERE Studiare l andamento dei prezzi dei mercati finanziari con una certa previsione su tendenze future Analisi Tecnica: studio dell andamento
STRATEGIA DI TRADING Turning Points ANALISI E OBIETTIVI DA RAGGIUNGERE Studiare l andamento dei prezzi dei mercati finanziari con una certa previsione su tendenze future Analisi Tecnica: studio dell andamento
Relazione di fine tirocinio. Andrea Santucci
 Relazione di fine tirocinio Andrea Santucci 10/04/2015 Indice Introduzione ii 1 Analisi numerica con COMSOL R 1 1.1 Il Software.................................... 1 1.1.1 Geometria................................
Relazione di fine tirocinio Andrea Santucci 10/04/2015 Indice Introduzione ii 1 Analisi numerica con COMSOL R 1 1.1 Il Software.................................... 1 1.1.1 Geometria................................
Esercitazioni di Calcolo Numerico 23-30/03/2009, Laboratorio 2
 Esercitazioni di Calcolo Numerico 23-30/03/2009, Laboratorio 2 [1] Metodo di Bisezione gli estremi a e b di un intervallo reale trovi uno zero della funzione f(x) nell intervallo [a, b] usando il metodo
Esercitazioni di Calcolo Numerico 23-30/03/2009, Laboratorio 2 [1] Metodo di Bisezione gli estremi a e b di un intervallo reale trovi uno zero della funzione f(x) nell intervallo [a, b] usando il metodo
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Breve introduzione al Calcolo Evoluzionistico
 Breve introduzione al Calcolo Evoluzionistico Stefano Cagnoni Dipartimento di Ingegneria dell Informazione, Università di Parma cagnoni@ce.unipr.it 1 Introduzione Il mondo fisico ed i fenomeni naturali
Breve introduzione al Calcolo Evoluzionistico Stefano Cagnoni Dipartimento di Ingegneria dell Informazione, Università di Parma cagnoni@ce.unipr.it 1 Introduzione Il mondo fisico ed i fenomeni naturali
2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1
![2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1](/thumbs/25/5899888.jpg "2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1") 1 PORTAFOGLIO Portafoglio Markowitz (2 titoli) (rischiosi) due titoli rendimento/varianza ( μ 1, σ 1 ), ( μ 2, σ 2 ) Si suppone μ 1 > μ 2, σ 1 > σ 2 portafoglio con pesi w 1, w 2 w 1 = w, w 2 = 1- w 1
1 PORTAFOGLIO Portafoglio Markowitz (2 titoli) (rischiosi) due titoli rendimento/varianza ( μ 1, σ 1 ), ( μ 2, σ 2 ) Si suppone μ 1 > μ 2, σ 1 > σ 2 portafoglio con pesi w 1, w 2 w 1 = w, w 2 = 1- w 1
Carichi unitari. Dimensionamento delle sezioni e verifica di massima. Dimensionamento travi a spessore. Altri carichi unitari. Esempio.
 Carichi unitari delle sezioni e verifica di massima Una volta definito lo spessore, si possono calcolare i carichi unitari (k/m ) Solaio del piano tipo Solaio di copertura Solaio torrino scala Sbalzo piano
Carichi unitari delle sezioni e verifica di massima Una volta definito lo spessore, si possono calcolare i carichi unitari (k/m ) Solaio del piano tipo Solaio di copertura Solaio torrino scala Sbalzo piano
REGOLAMENTO (UE) N. 1235/2011 DELLA COMMISSIONE
 N. 1235/2011 DELLA COMMISSIONE") 30.11.2011 Gazzetta ufficiale dell Unione europea L 317/17 REGOLAMENTO (UE) N. 1235/2011 DELLA COMMISSIONE del 29 novembre 2011 recante modifica del regolamento (CE) n. 1222/2009 del Parlamento europeo
30.11.2011 Gazzetta ufficiale dell Unione europea L 317/17 REGOLAMENTO (UE) N. 1235/2011 DELLA COMMISSIONE del 29 novembre 2011 recante modifica del regolamento (CE) n. 1222/2009 del Parlamento europeo
TECNICA DELLE COSTRUZIONI: PROGETTO DI STRUTTURE LE FONDAZIONI
 LE FONDAZIONI Generalità sulle fondazioni Fondazioni dirette Plinti isolati Trave rovescia Esecutivi di strutture di fondazione Generalità Le opere di fondazione hanno il compito di trasferire le sollecitazioni
LE FONDAZIONI Generalità sulle fondazioni Fondazioni dirette Plinti isolati Trave rovescia Esecutivi di strutture di fondazione Generalità Le opere di fondazione hanno il compito di trasferire le sollecitazioni
RAPPRESENTAZIONE BINARIA DEI NUMERI. Andrea Bobbio Anno Accademico 1996-1997
 1 RAPPRESENTAZIONE BINARIA DEI NUMERI Andrea Bobbio Anno Accademico 1996-1997 Numeri Binari 2 Sistemi di Numerazione Il valore di un numero può essere espresso con diverse rappresentazioni. non posizionali:
1 RAPPRESENTAZIONE BINARIA DEI NUMERI Andrea Bobbio Anno Accademico 1996-1997 Numeri Binari 2 Sistemi di Numerazione Il valore di un numero può essere espresso con diverse rappresentazioni. non posizionali:
SPC e distribuzione normale con Access
 SPC e distribuzione normale con Access In questo articolo esamineremo una applicazione Access per il calcolo e la rappresentazione grafica della distribuzione normale, collegata con tabelle di Clienti,
SPC e distribuzione normale con Access In questo articolo esamineremo una applicazione Access per il calcolo e la rappresentazione grafica della distribuzione normale, collegata con tabelle di Clienti,
Algoritmi e Strutture Dati & Laboratorio di Algoritmi e Programmazione
 Algoritmi e Strutture Dati & Laboratorio di Algoritmi e Programmazione Esercizi II parte Esercizio 1 Discutere la correttezza di ciascuna delle seguenti affermazioni. Dimostrare formalmente la validità
Algoritmi e Strutture Dati & Laboratorio di Algoritmi e Programmazione Esercizi II parte Esercizio 1 Discutere la correttezza di ciascuna delle seguenti affermazioni. Dimostrare formalmente la validità
LEZIONE 7. Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.
 e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.") 7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
DIPARTIMENTO DI STUDI UMANISTICI
 DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
CHRYSO Flexò la tecnologia avanzata per pannelli a taglio termico
 la tecnologia avanzata per pannelli a taglio termico CHRYSO Flexò: la tecnologia avanzata per pannelli a taglio termico IL SISTEMA, COPERTO DA BREVETTO INTERNAZIONALE, PER OTTIMIZZARE LA PRESTAZIONE TERMICA
la tecnologia avanzata per pannelli a taglio termico CHRYSO Flexò: la tecnologia avanzata per pannelli a taglio termico IL SISTEMA, COPERTO DA BREVETTO INTERNAZIONALE, PER OTTIMIZZARE LA PRESTAZIONE TERMICA
void funzioneprova() { int x=2; cout<<"dentro la funzione x="<<x<<endl; }
 { int x=2; cout<<dentro la funzione x=<<x<<endl; }") FUNZIONI 57. Cosa servono le funzioni? A spezzare il programma in diverse parti relativamente indipendenti fra loro, ovvero interagenti sono attraverso i parametri di input ed IL VALORE di uscita. In questo
FUNZIONI 57. Cosa servono le funzioni? A spezzare il programma in diverse parti relativamente indipendenti fra loro, ovvero interagenti sono attraverso i parametri di input ed IL VALORE di uscita. In questo
risulta (x) = 1 se x < 0.
 = 1 se x < 0.") Questo file si pone come obiettivo quello di mostrarvi come lo studio di una funzione reale di una variabile reale, nella cui espressione compare un qualche valore assoluto, possa essere svolto senza necessariamente
Questo file si pone come obiettivo quello di mostrarvi come lo studio di una funzione reale di una variabile reale, nella cui espressione compare un qualche valore assoluto, possa essere svolto senza necessariamente
Documentazione esterna al software matematico sviluppato con MatLab
 Documentazione esterna al software matematico sviluppato con MatLab Algoritmi Metodo di Gauss-Seidel con sovrarilassamento Metodo delle Secanti Metodo di Newton Studente Amelio Francesco 556/00699 Anno
Documentazione esterna al software matematico sviluppato con MatLab Algoritmi Metodo di Gauss-Seidel con sovrarilassamento Metodo delle Secanti Metodo di Newton Studente Amelio Francesco 556/00699 Anno
VILLA BORROMEO Sarmeola di Rubano Padova 25 novembre 2010. Relatore: Ing. Carlo Calisse
 LE RETI ANTICADUTA DALLE NORME UNI EN 1263-1 1 e 2 ALLE NUOVE LINEE GUIDA AIPAA VILLA BORROMEO Sarmeola di Rubano Padova 25 novembre 2010 Relatore: Ing. Carlo Calisse INTRODUZIONE ALLE NORME UNI EN 1263-1:
LE RETI ANTICADUTA DALLE NORME UNI EN 1263-1 1 e 2 ALLE NUOVE LINEE GUIDA AIPAA VILLA BORROMEO Sarmeola di Rubano Padova 25 novembre 2010 Relatore: Ing. Carlo Calisse INTRODUZIONE ALLE NORME UNI EN 1263-1:
INTRODUZIONE AL CONTROLLO OTTIMO
 INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
La funzione è continua nel suo dominio perchè y = f(x) è composizione di funzioni continue. Il punto x = 0 è un punto isolato per D f.
 è composizione di funzioni continue. Il punto x = 0 è un punto isolato per D f.") FUNZIONI CONTINUE - ALCUNI ESERCIZI SVOLTI SIMONE ALGHISI 1. Continuità di una funzione Dati un insieme D R, una funzione f : D R e x 0 R, si è detto che f è continua in x 0 se sono soddisfatte le seguenti
FUNZIONI CONTINUE - ALCUNI ESERCIZI SVOLTI SIMONE ALGHISI 1. Continuità di una funzione Dati un insieme D R, una funzione f : D R e x 0 R, si è detto che f è continua in x 0 se sono soddisfatte le seguenti
4. Operazioni aritmetiche con i numeri binari
 I Numeri Binari 4. Operazioni aritmetiche con i numeri binari Contare con i numeri binari Prima di vedere quali operazioni possiamo effettuare con i numeri binari, iniziamo ad imparare a contare in binario:
I Numeri Binari 4. Operazioni aritmetiche con i numeri binari Contare con i numeri binari Prima di vedere quali operazioni possiamo effettuare con i numeri binari, iniziamo ad imparare a contare in binario:
Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e
 Alberi di decisione Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e lanciarlo con i parametri di default.
Alberi di decisione Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e lanciarlo con i parametri di default.
2. Leggi finanziarie di capitalizzazione
 2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
Introduzione ai Metodi Formali
 Intruzione ai Meti Formali Sistemi software anche molto complessi regolano la vita quotidiana, anche in situazioni life-critical (e.g. avionica) e business-critical (e.g. operazioni bancarie). Esempi di
Intruzione ai Meti Formali Sistemi software anche molto complessi regolano la vita quotidiana, anche in situazioni life-critical (e.g. avionica) e business-critical (e.g. operazioni bancarie). Esempi di
Lezione. Tecnica delle Costruzioni
 Lezione Tecnica delle Costruzioni 1 Flessione composta tensoflessione Risposta della sezione Campo elastico σ + A I Risposta della sezione Al limite elastico el, Per calcolare el, : σ A + el, I f f + el,
Lezione Tecnica delle Costruzioni 1 Flessione composta tensoflessione Risposta della sezione Campo elastico σ + A I Risposta della sezione Al limite elastico el, Per calcolare el, : σ A + el, I f f + el,
Esponenziali elogaritmi
 Esponenziali elogaritmi Potenze ad esponente reale Ricordiamo che per un qualsiasi numero razionale m n prendere n>0) si pone a m n = n a m (in cui si può sempre a patto che a sia un numero reale positivo.
Esponenziali elogaritmi Potenze ad esponente reale Ricordiamo che per un qualsiasi numero razionale m n prendere n>0) si pone a m n = n a m (in cui si può sempre a patto che a sia un numero reale positivo.
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
Sono casi particolari di MCF : SPT (cammini minimi) non vi sono vincoli di capacità superiore (solo x ij > 0) (i, j) A : c ij, costo di percorrenza
 non vi sono vincoli di capacità superiore (solo x ij > 0) (i, j) A : c ij, costo di percorrenza") Il problema di flusso di costo minimo (MCF) Dati : grafo orientato G = ( N, A ) i N, deficit del nodo i : b i (i, j) A u ij, capacità superiore (max quantità di flusso che può transitare) c ij, costo di
Il problema di flusso di costo minimo (MCF) Dati : grafo orientato G = ( N, A ) i N, deficit del nodo i : b i (i, j) A u ij, capacità superiore (max quantità di flusso che può transitare) c ij, costo di
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI
 FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
2 FUNZIONI REALI DI VARIABILE REALE
 2 FUNZIONI REALI DI VARIABILE REALE 2.1 CONCETTO DI FUNZIONE Definizione 2.1 Siano A e B due insiemi. Una funzione (o applicazione) f con dominio A a valori in B è una legge che associa ad ogni elemento
2 FUNZIONI REALI DI VARIABILE REALE 2.1 CONCETTO DI FUNZIONE Definizione 2.1 Siano A e B due insiemi. Una funzione (o applicazione) f con dominio A a valori in B è una legge che associa ad ogni elemento
Dimensionamento delle strutture
 Dimensionamento delle strutture Prof. Fabio Fossati Department of Mechanics Politecnico di Milano Lo stato di tensione o di sforzo Allo scopo di caratterizzare in maniera puntuale la distribuzione delle
Dimensionamento delle strutture Prof. Fabio Fossati Department of Mechanics Politecnico di Milano Lo stato di tensione o di sforzo Allo scopo di caratterizzare in maniera puntuale la distribuzione delle
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
PROGRAMMA SVOLTO NELLA SESSIONE N.
 Università C. Cattaneo Liuc, Corso di Statistica, Sessione n. 1, 2014 Laboratorio Excel Sessione n. 1 Venerdì 031014 Gruppo PZ Lunedì 061014 Gruppo AD Martedì 071014 Gruppo EO PROGRAMMA SVOLTO NELLA SESSIONE
Università C. Cattaneo Liuc, Corso di Statistica, Sessione n. 1, 2014 Laboratorio Excel Sessione n. 1 Venerdì 031014 Gruppo PZ Lunedì 061014 Gruppo AD Martedì 071014 Gruppo EO PROGRAMMA SVOLTO NELLA SESSIONE
Indici di dispersione
 Indici di dispersione 1 Supponiamo di disporre di un insieme di misure e di cercare un solo valore che, meglio di ciascun altro, sia in grado di catturare le caratteristiche della distribuzione nel suo
Indici di dispersione 1 Supponiamo di disporre di un insieme di misure e di cercare un solo valore che, meglio di ciascun altro, sia in grado di catturare le caratteristiche della distribuzione nel suo
Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 2011/2012
 Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 211/212 Ricordare: una funzione lipschitziana tra spazi metrici manda insiemi limitati in insiemi limitati; se il dominio di una funzione
Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 211/212 Ricordare: una funzione lipschitziana tra spazi metrici manda insiemi limitati in insiemi limitati; se il dominio di una funzione
Il Capital asset pricing model è un modello di equilibrio dei mercati, individua una relazione tra rischio e rendimento, si fonda sulle seguenti
 Il Capital asset pricing model è un modello di equilibrio dei mercati, individua una relazione tra rischio e rendimento, si fonda sulle seguenti ipotesi: Gli investitori sono avversi al rischio; Gli investitori
Il Capital asset pricing model è un modello di equilibrio dei mercati, individua una relazione tra rischio e rendimento, si fonda sulle seguenti ipotesi: Gli investitori sono avversi al rischio; Gli investitori
Intorni Fissato un punto sull' asse reale, si definisce intorno del punto, un intervallo aperto contenente e tutto contenuto in
 Intorni Fissato un punto sull' asse reale, si definisce intorno del punto, un intervallo aperto contenente e tutto contenuto in Solitamente si fa riferimento ad intorni simmetrici =, + + Definizione: dato
Intorni Fissato un punto sull' asse reale, si definisce intorno del punto, un intervallo aperto contenente e tutto contenuto in Solitamente si fa riferimento ad intorni simmetrici =, + + Definizione: dato
a) Il campo di esistenza di f(x) è dato da 2x 0, ovvero x 0. Il grafico di f(x) è quello di una iperbole -1 1
 Il campo di esistenza di f(x) è dato da 2x 0, ovvero x 0. Il grafico di f(x) è quello di una iperbole -1 1") LE FUNZIONI EALI DI VAIABILE EALE Soluzioni di quesiti e problemi estratti dal Corso Base Blu di Matematica volume 5 Q[] Sono date le due funzioni: ) = e g() = - se - se = - Determina il campo di esistenza
LE FUNZIONI EALI DI VAIABILE EALE Soluzioni di quesiti e problemi estratti dal Corso Base Blu di Matematica volume 5 Q[] Sono date le due funzioni: ) = e g() = - se - se = - Determina il campo di esistenza
 Stima per intervalli Nei metodi di stima puntuale è sempre presente un ^ errore θ θ dovuto al fatto che la stima di θ in genere non coincide con il parametro θ. Sorge quindi l esigenza di determinare una
Stima per intervalli Nei metodi di stima puntuale è sempre presente un ^ errore θ θ dovuto al fatto che la stima di θ in genere non coincide con il parametro θ. Sorge quindi l esigenza di determinare una
Complessità Computazionale
 Complessità Computazionale Analisi Algoritmi e pseudocodice Cosa significa analizzare un algoritmo Modello di calcolo Analisi del caso peggiore e del caso medio Esempio di algoritmo in pseudocodice INSERTION
Complessità Computazionale Analisi Algoritmi e pseudocodice Cosa significa analizzare un algoritmo Modello di calcolo Analisi del caso peggiore e del caso medio Esempio di algoritmo in pseudocodice INSERTION
Teoria dei Giochi. Anna Torre
 Teoria dei Giochi Anna Torre Almo Collegio Borromeo 14 marzo 2013 email: anna.torre@unipv.it sito web del corso:www-dimat.unipv.it/atorre/borromeo2013.html IL PARI O DISPARI I II S T S (-1, 1) (1, -1)
Teoria dei Giochi Anna Torre Almo Collegio Borromeo 14 marzo 2013 email: anna.torre@unipv.it sito web del corso:www-dimat.unipv.it/atorre/borromeo2013.html IL PARI O DISPARI I II S T S (-1, 1) (1, -1)
DOMANDE a risposta multipla (ogni risposta esatta riceve una valutazione di due; non sono previste penalizzazioni in caso di risposte non corrette)
") In una ora rispondere alle dieci domande a risposta multipla e a una delle due domande a risposta aperta, e risolvere l esercizio. DOMANDE a risposta multipla (ogni risposta esatta riceve una valutazione
In una ora rispondere alle dieci domande a risposta multipla e a una delle due domande a risposta aperta, e risolvere l esercizio. DOMANDE a risposta multipla (ogni risposta esatta riceve una valutazione
RICERCA OPERATIVA GRUPPO B prova scritta del 22 marzo 2007
 RICERCA OPERATIVA GRUPPO B prova scritta del 22 marzo 2007 Rispondere alle seguenti domande marcando a penna la lettera corrispondente alla risposta ritenuta corretta (una sola tra quelle riportate). Se
RICERCA OPERATIVA GRUPPO B prova scritta del 22 marzo 2007 Rispondere alle seguenti domande marcando a penna la lettera corrispondente alla risposta ritenuta corretta (una sola tra quelle riportate). Se
Indici (Statistiche) che esprimono le caratteristiche di simmetria e
 che esprimono le caratteristiche di simmetria e") Indici di sintesi Indici (Statistiche) Gran parte della analisi statistica consiste nel condensare complessi pattern di osservazioni in un indicatore che sia capace di riassumere una specifica caratteristica
Indici di sintesi Indici (Statistiche) Gran parte della analisi statistica consiste nel condensare complessi pattern di osservazioni in un indicatore che sia capace di riassumere una specifica caratteristica
INTEGRALI DEFINITI. Tale superficie viene detta trapezoide e la misura della sua area si ottiene utilizzando il calcolo di un integrale definito.
 INTEGRALI DEFINITI Sia nel campo scientifico che in quello tecnico si presentano spesso situazioni per affrontare le quali è necessario ricorrere al calcolo dell integrale definito. Vi sono infatti svariati
INTEGRALI DEFINITI Sia nel campo scientifico che in quello tecnico si presentano spesso situazioni per affrontare le quali è necessario ricorrere al calcolo dell integrale definito. Vi sono infatti svariati
Capitolo 25: Lo scambio nel mercato delle assicurazioni
 Capitolo 25: Lo scambio nel mercato delle assicurazioni 25.1: Introduzione In questo capitolo la teoria economica discussa nei capitoli 23 e 24 viene applicata all analisi dello scambio del rischio nel
Capitolo 25: Lo scambio nel mercato delle assicurazioni 25.1: Introduzione In questo capitolo la teoria economica discussa nei capitoli 23 e 24 viene applicata all analisi dello scambio del rischio nel
LE FINESTRE E L ISOLAMENTO ACUSTICO
 LE FINESTRE E L ISOLAMENTO ACUSTICO Roberto Malatesta. William Marcone Ufficio Tecnico (giugno 2008) LA PROTEZIONE DAL RUMORE DEGLI EDIFICI, LA NORMATIVA NAZIONALE La maggior sensibilità delle persone
LE FINESTRE E L ISOLAMENTO ACUSTICO Roberto Malatesta. William Marcone Ufficio Tecnico (giugno 2008) LA PROTEZIONE DAL RUMORE DEGLI EDIFICI, LA NORMATIVA NAZIONALE La maggior sensibilità delle persone
SISTEMI MULTIAGENTE. Esercizio
 Esercizio SISTEMI MULTIAGENTE Nello studio dei sistemi dinamici complessi la simulazione al computer ha un ruolo importante dal momento che presenta molti vantaggi rispetto ai metodi sperimentali più tradizionali;
Esercizio SISTEMI MULTIAGENTE Nello studio dei sistemi dinamici complessi la simulazione al computer ha un ruolo importante dal momento che presenta molti vantaggi rispetto ai metodi sperimentali più tradizionali;
SINTESI DELLA NORMATIVA ETAG EOTA
 SINTESI DELLA NORMATIVA ETAG EOTA Scopo del presente documento è riassumere in modo conciso e, nello stesso tempo, completo e dettagliato, le indicazioni fornite nella norma EOTA circa le modalità di svolgimento
SINTESI DELLA NORMATIVA ETAG EOTA Scopo del presente documento è riassumere in modo conciso e, nello stesso tempo, completo e dettagliato, le indicazioni fornite nella norma EOTA circa le modalità di svolgimento
Lezione n. 2 (a cura di Chiara Rossi)
") Lezione n. 2 (a cura di Chiara Rossi) QUANTILE Data una variabile casuale X, si definisce Quantile superiore x p : X P (X x p ) = p Quantile inferiore x p : X P (X x p ) = p p p=0.05 x p x p Graficamente,
Lezione n. 2 (a cura di Chiara Rossi) QUANTILE Data una variabile casuale X, si definisce Quantile superiore x p : X P (X x p ) = p Quantile inferiore x p : X P (X x p ) = p p p=0.05 x p x p Graficamente,
Luigi Piroddi piroddi@elet.polimi.it
 Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
CAPACITÀ DI PROCESSO (PROCESS CAPABILITY)
") CICLO DI LEZIONI per Progetto e Gestione della Qualità Facoltà di Ingegneria CAPACITÀ DI PROCESSO (PROCESS CAPABILITY) Carlo Noè Università Carlo Cattaneo e-mail: cnoe@liuc.it 1 CAPACITÀ DI PROCESSO Il
CICLO DI LEZIONI per Progetto e Gestione della Qualità Facoltà di Ingegneria CAPACITÀ DI PROCESSO (PROCESS CAPABILITY) Carlo Noè Università Carlo Cattaneo e-mail: cnoe@liuc.it 1 CAPACITÀ DI PROCESSO Il
TIP AND TRICKS 01 DEFINIZIONE DEI PARAMETRI DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA
 TIP AND TRICKS 01 DEFINIZIONE DEI PARAMETRI DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA TECNICA DI DEFINIZIONE DELLE PROPRIETA' DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA Descrizione
TIP AND TRICKS 01 DEFINIZIONE DEI PARAMETRI DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA TECNICA DI DEFINIZIONE DELLE PROPRIETA' DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA Descrizione
1. PRIME PROPRIETÀ 2
 RELAZIONI 1. Prime proprietà Il significato comune del concetto di relazione è facilmente intuibile: due elementi sono in relazione se c è un legame tra loro descritto da una certa proprietà; ad esempio,
RELAZIONI 1. Prime proprietà Il significato comune del concetto di relazione è facilmente intuibile: due elementi sono in relazione se c è un legame tra loro descritto da una certa proprietà; ad esempio,
Lenti sottili/1. Menisco convergente. Menisco divergente. Piano convessa. Piano concava. Biconcava. Biconvessa. G. Costabile
 Lenti sottili/1 La lente è un sistema ottico costituito da un pezzo di materiale trasparente omogeneo (vetro, policarbonato, quarzo, fluorite,...) limitato da due calotte sferiche (o, più generalmente,
Lenti sottili/1 La lente è un sistema ottico costituito da un pezzo di materiale trasparente omogeneo (vetro, policarbonato, quarzo, fluorite,...) limitato da due calotte sferiche (o, più generalmente,
Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012
 Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012 Problema 1 Due carrelli A e B, di massa m A = 104 kg e m B = 128 kg, collegati da una molla di costante elastica k = 3100
Prova scritta di Fisica Generale I Corso di studio in Astronomia 22 giugno 2012 Problema 1 Due carrelli A e B, di massa m A = 104 kg e m B = 128 kg, collegati da una molla di costante elastica k = 3100
CONCETTO DI LIMITE DI UNA FUNZIONE REALE
 CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
FUNZIONE. Si scrive: A B f: A B x y=f(x) (si legge: f funzione da A in B) x f y= f(x)
 (si legge: f funzione da A in B) x f y= f(x)") 1 FUNZIONE Dati gli insiemi A e B, si definisce funzione da A in B una relazione o legge o corrispondenza che ad ogni elemento di A associa uno ed un solo elemento di B. Si scrive: A B f: A B f() (si legge:
1 FUNZIONE Dati gli insiemi A e B, si definisce funzione da A in B una relazione o legge o corrispondenza che ad ogni elemento di A associa uno ed un solo elemento di B. Si scrive: A B f: A B f() (si legge:
1996: il prezzo salì a $5.00 per bushel con contestazioni sui vecchi contratti
 MICRO ECONOMIA Analisi della Domanda e dell Offerta 1. Motivazioni 2. Definizione di Mercati Competitivi 3. La Funzione di Domanda di Mercato 4. La Funzione di Offerta di Mercato 5. Equilibrio e sue caratteristiche
MICRO ECONOMIA Analisi della Domanda e dell Offerta 1. Motivazioni 2. Definizione di Mercati Competitivi 3. La Funzione di Domanda di Mercato 4. La Funzione di Offerta di Mercato 5. Equilibrio e sue caratteristiche
(a cura di Francesca Godioli)
") lezione n. 12 (a cura di Francesca Godioli) Ad ogni categoria della variabile qualitativa si può assegnare un valore numerico che viene chiamato SCORE. Passare dalla variabile qualitativa X2 a dei valori
lezione n. 12 (a cura di Francesca Godioli) Ad ogni categoria della variabile qualitativa si può assegnare un valore numerico che viene chiamato SCORE. Passare dalla variabile qualitativa X2 a dei valori
Verifica parte IIA. Test (o analisi dinamica) Mancanza di continuità. Esempio
 Mancanza di continuità. Esempio") Test (o analisi dinamica) Verifica parte IIA Rif. Ghezzi et al. 6.3-6.3.3 Consiste nell osservare il comportamento del sistema in un certo numero di condizioni significative Non può (in generale) essere
Test (o analisi dinamica) Verifica parte IIA Rif. Ghezzi et al. 6.3-6.3.3 Consiste nell osservare il comportamento del sistema in un certo numero di condizioni significative Non può (in generale) essere
Lezione 8. La macchina universale
 Lezione 8 Algoritmi La macchina universale Un elaboratore o computer è una macchina digitale, elettronica, automatica capace di effettuare trasformazioni o elaborazioni su i dati digitale= l informazione
Lezione 8 Algoritmi La macchina universale Un elaboratore o computer è una macchina digitale, elettronica, automatica capace di effettuare trasformazioni o elaborazioni su i dati digitale= l informazione
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre