PROGETTO: SISTEMA DI CONTROLLO DELLA LETTURA DI UN Hard Disk MAGNETICO
|
|
|
- Viviana Bonelli
- 8 anni fa
- Visualizzazioni
Transcript
1 PROGETTO: SISTEMA DI CONTROLLO DELLA LETTURA DI UN Hard Disk MAGNETICO

2 Introduzione [1] Richard C. Dorf, Robert H. Bishop, «Controlli Automatici», Edizione Pearson. [2] [3]
![Pearson. [2] http://it.wikipedia.](/docs-images/45/2699926/images/page_2.jpg "org/wiki/disco_rigido [3] http://www.")
3 Processo di progettazione dei sistemi di controllo

4 Processo di progettazione dei sistemi di controllo

5 Introduzione al sistema Un disco rigido o disco fisso, anche chiamato hard disk drive è un dispositivo di memoria di massa di tipo magnetico che utilizza uno o più dischi magnetizzati per l'archiviazione dei dati. Storia L'hard disk è stato inventato nel 1956 dall'ibm. Il primo prototipo era costituito da 50 dischi del diametro di 24 pollici (circa 60 cm) e poteva immagazzinare circa 5 megabyte di dati. Era grande quanto un frigorifero, con un peso di oltre una tonnellata. La denominazione originaria era fixed disk (disco fisso), il termine hard disk (disco rigido) nacque intorno al 1970 per contrapposizione coi neonati floppy disk (dischetti). Il primo modello per personal computer fu il Seagate ST 506 prodotto da Seagate Technology nel 1980, aveva una capacità di 5 MB, diametro di 5,25 pollici ed era dotato di motore passo passo per il movimento delle testine. Nel 2007 Albert Fert e Peter Grünberg ricevono il premio Nobel per la Fisica come pionieri dell'invenzione dell'hard disk moderno cioè con capacità di memorizzazione superiore al gigabyte(scoperta della magnetoresistenza gigante).

6 Introduzione al sistema Descrizione Il disco rigido è costituito fondamentalmente da uno o più piatti in rapida rotazione, realizzati in alluminio o vetro, rivestiti di materiale ferromagnetico edaduetestine per ogni disco (una per lato), le quali, durante il funzionamento "volano" alla distanza di poche decine di nanometri dalla superficie del disco leggendo o scrivendo i dati. La testina è tenuta sollevata dall'aria mossa dalla rotazione stessa dei dischi la cui frequenza o velocità di rotazione può superare i giri al minuto; attualmente i valori standard di rotazione sono 4.200, 5.400, 7.200, e giri al minuto.

7 Introduzione al sistema La memorizzazione o scrittura dell'informazione o dati sulla superficie del supporto ferromagnetico consiste sostanzialmente nel trasferimento di un determinato verso alla magnetizzazione di un certo numero di domini di Weiss. Ad un certo stato (verso) di magnetizzazione è associato un bit di informazione (1 o 0). Il numero di domini di Weiss che costituiscono un singolo bit, moltiplicato per la loro estensione superficiale media, rapportato alla superficie di archiviazione disponibile, fornisce la densità d'informazione (bit al pollice quadro). L'evoluzione continua della tecnologia dei dischi rigidi ci ha portati ormai vicino al limite fisico inferiore tollerabile: quando infatti il numero di domini che definiscono un singolo bit si è avvicinato all'unità e la loro area è dell'ordine di pochi nanometri quadri, l'energia termica del sistema è diventata ormai paragonabile all'energia magnetica ed è sufficiente un tempo brevissimo a far invertire il verso della magnetizzazione del dominio (trattasi di una fluttuazione aleatoria) e perdere in questo modo l'informazione contenuta.
.")
8 Introduzione al sistema La lettura/scrittura dell'informazione magnetica in passato veniva affidata a testine induttive, avvolgimenti di rame miniaturizzati in grado di rilevare, in fase di lettura e secondo il principio di induzione magnetica, lavariazione del flusso del campo magnetico statico al transitare della testina tra un bit ed il successivo di una traccia contenente i bit, oppure in maniera duale imprimere una magnetizzazione sul disco in fase di scrittura. L'evoluzione che la spintronica ha portato nelle case di tutti sono state le testine magnetoresistive, basatesuundispositivo,laspin valve, ingradodi variare resistenza al mutare dell'intensità del campo magnetico. Il vantaggio dato da queste testine risiede nella loro sensibilità, migliore rispetto alle vecchie testine induttive, e nella loro dimensione ridottissima, cosa che consente di seguire il passo delle evoluzioni verso il nanometro per quanto riguarda l'area di un singolo bit. Infine, il prossimo futuro vedrà protagoniste della scena le testine di lettura basate sulle magnetic tunneling junction,mtj.

9 Introduzione al sistema Sistema di azionamento del disco 1999 Quantum Corporation

10 L obiettivo del dispositivo di lettura del disco è posizionare la testina per leggere i dati immagazzinati su una traccia del disco magnetico Introduzione al sistema

11 La variabile da controllare è la posizione della testina di lettura (il disco ruota ad una velocità di 7200 giri/min e la testina si trova ad una distanza di 100nm) Introduzione al sistema
 Introduzione")
12 Specifica per la precisione di posizione di 1 μm. La testina deve inoltre muoversi tra la traccia A e B entro 50 ms Introduzione al sistema

13 Stabiliamo una configurazione iniziale del sistema a ciclo chiuso utilizzando un motore per attuare il braccio Introduzione al sistema

14 Introduzione al sistema Sistema di controllo ad anello chiuso per l azionamento del disco

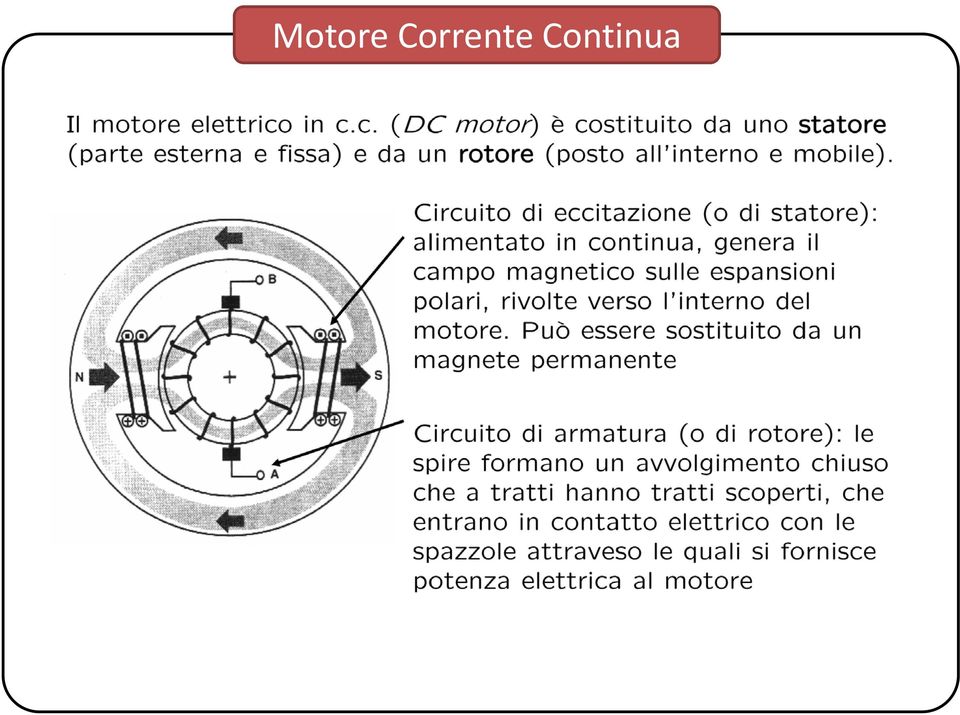
15 Modelli Matematici dei Sistemi Il sistema utilizza un motore CC a magneti permanenti, un sensore di posizione ed un braccio rigido Motore Corrente Continua

16 Motore Corrente Continua

17 Motore Corrente Continua Un motore DC è un attuatore di potenza che fornisce energia al carico. Il motore converte l energia elettrica a corrente continua in energia meccanica di rotazione. La maggior parte della coppia generata nel rotore (armatura) del motore è disponibile per azionare il carico esterno.

18 Motore Corrente Continua Un semplice motore DC. Quando la corrente scorre negli avvolgimenti, si genera un campo magnetico intorno al rotore. La parte sinistra del rotore è respinta dal magnete di sinistra ed attirata da quello di destra. Analogamente fa la parte in basso a destra. La coppia genera la rotazione. Quando le armature si allineano orizzontalmente, il commutatore inverte la direzione di corrente attraverso gli avvolgimenti, modificando anche il campo magnetico. Il processo ritorna quindi allo stato di partenza e il ciclo si ripete.

19 Motore Corrente Continua
20 Motore Corrente Continua (a) Schema elettrico. (b) Rappresentazione schematica esplosa.
 Rappresentazione")
21 Motore Corrente Continua La funzione di trasferimento di un motore DC può essere ottenuta tramite un approssimazione lineare trascurando effetti di secondo ordine quali l isteresi e la caduta di tensione sulle spazzole. La tensione di ingresso può essere applicata ai morsetti dell eccitazione o dell armatura. Il flusso al traferro del motore, supposto che non ci sia saturazione, risulta proporzionale alla corrente di eccitazione. La coppia sviluppata dal motore viene assunta proporzionale al flusso e alla corrente di armatura Risulta evidente che per avere un sistema lineare una delle due correnti deve essere mantenuta costante, mentre l altra diventa la variabile di ingresso.
22 Motore Corrente Continua (A) Consideriamo il Motore Controllato sulla Corrente di Eccitazione Applicando la trasformata di Laplace Corrente di armatura costante Costante del motore La corrente di eccitazione è legata alla tensione dello stesso circuito
23 Motore Corrente Continua (A) Consideriamo il Motore Controllato sulla Corrente di Eccitazione La coppia generata dal motore è uguale a quella applicata al carico a meno di un disturbo coppia del motore coppia di carico coppia di disturbo La legge di Newton per la rotazione
24 Motore Corrente Continua (A) Consideriamo il Motore Controllato sulla Corrente di Eccitazione La funzione di trasferimento dell insieme motore carico con coppia di disturbo nulla Di solito e quindi la costante dell eccitazione può essere trascurata Schema a blocchi di un motore DC controllato sull eccitazione
25 Motore Corrente Continua Schema a blocchi di un motore DC controllato sull eccitazione
26 Motore Corrente Continua (B) Consideriamo il Motore Controllato sulla Corrente di Armatura L eccitazione può essere ottenuta con un avvolgimento percorso da corrente o con un magnete permanente, quando è alimentata da una corrente costante la coppia è data La corrente di armatura è legata alla tensione applicata Funzione di permeabilità del materiale magnetico Forza controelettromotrice, proporzionale alla velocità del motore Trasformata della velocità angolare
27 Motore Corrente Continua (B) Consideriamo il Motore Controllato sulla Corrente di Armatura Corrente di armatura Coppia di carico Funzione di trasferimento con coppia di disturbo nulla Schema a blocchi di un motore DC controllato sull armatura
28 Motore Corrente Continua Schema a blocchi di un motore DC controllato sull armatura
29 Motore Corrente Continua (B) Consideriamo il Motore Controllato sulla Corrente di Armatura Per molti motori la costante di tempo dell armatura è trascurabile Costante di tempo equivalente Si noti che Km e Kb sono uguali infatti quando il motore raggiunge un regime la potenza di ingresso al rotore e quella fornita all albero risultano bilanciate (trascurando la resistenza del rotore). potenza di ingresso al rotore Potenza fornita all albero
30 Motore Corrente Continua Schema a blocchi di un motore CC controllato sull eccitazione Schema a blocchi di un motore CC controllato sull armatura
31 Motore Corrente Continua
32 Modelli Matematici dei Sistemi
33 Modelli Matematici dei Sistemi Il sistema utilizza un motore CC a magneti permanenti, un sensore di posizione ed un braccio rigido
34 Modelli matematici dei sistemi La testina di lettura è montata su un dispositivo portatestina che è collegato al braccio. Una sospensione che può flettersi in senso verticale è utilizzata per permettere alla testinadigalleggiaresopraildiscoadunadistanzadi100nm.unatestinaafilmsottile legge il flusso magnetico e fornisce il segnale all amplificatore. Il segnale di errore è ottenuto leggendo l errore da una traccia indice preregistrata. Possiamo assumere come f.d.t. del sensore H(s) = 1 Assumiamo che la sospensione sia rigida e non possa flettersi significativamente Supporto della testina di lettura con la sospensione
35 Modelli Matematici dei Sistemi Schema a blocchi dell azionamento di lettura di un disco
36 Modelli Matematici dei Sistemi Funzione di Trasferimento
37 Modelli Matematici dei Sistemi F.d.t. Schema a blocchi di un sistema ad anello chiuso
38 Modelli Matematici dei Sistemi Risposta del sistema rappresentato per R(s) = 0.1/s
39 Modelli in forma di stato
40 Modelli in forma di stato Consideriamo il supporto per la testina, poiché desideriamo un braccio e una sospensione molto leggeri, per garantire movimenti rapidi, dobbiamo considerare l effetto della sospensione che è un supporto molto sottile fatto di acciaio per molle. sospensione (a) Modello di un sistema a due masse con una sospensione flessibile. (b) Modello semplificato con una sospensione rigida.
41 Modelli in forma di stato (b) Modello semplificato con una sospensione rigida.
42 Modelli in forma di stato (b) Modello semplificato con una sospensione rigida. Modello della f.d.t. della testina del lettore, incluso l effetto del circuito di eccitazione del motore Corrisponde al modello già calcolato precedentemente Esempio
43 Modelli in forma di stato (a) Modello di un sistema a due masse con una sospensione flessibile. Equazioni differenziali del sistema Scelta delle variabili di stato
44 Modelli in forma di stato Equazioni di stato in forma matriciale Esempio
45 Modelli in forma di stato Considerando come uscita la velocità di posizionamento della testina otterremo: Risposta di y per un ingresso a gradino per il modello a due masse con k = 10 La risposta è abbastanza oscillante e sarebbe auspicabile una sospensione più rigida
46 Caratteristiche dei Sistemi
47 Caratteristiche dei Sistemi Il disco deve posizionare con precisione la testina di lettura ed essere capace di ridurre gli effetti delle variazioni dei parametri, dei disturbi esterni, delle vibrazioni. E importante evitare di mandare in risonanza il sistema con disturbi esterni quali un colpo al computer. Prestazioni dell azionamento del sistema di lettura del disco rispetto ai disturbi e alle variazioni parametriche. Errore a regime del sistema e risposta in transitorio al variare del guadagno
48 Caratteristiche dei Sistemi Sistema di controllo per l azionamento della testina di lettura del disco Il sistema ad anello chiuso usa come controllore un amplificatore a guadagno variabile.
49 Caratteristiche a regime Caratteristiche dei Sistemi Determiniamo il regime in corrispondenza di un ingresso a gradino in assenza di disturbi Errore R(s)*W(s) Valore di regime L errore a regime per un ingresso a gradino è Questa prestazione si mantiene anche variando i parametri del sistema
50 Caratteristiche in transitorio Caratteristiche dei Sistemi Analizziamo le caratteristiche del sistema in transitorio al variare di K a ed in assenza di disturbi F.d.t. a ciclo chiuso
51 Risposte al gradino del sistema ad anello chiuso per K a = 10 e K a = 80. Caratteristiche dei Sistemi
52 Risposta a un disturbo quando il riferimento è nullo Caratteristiche dei Sistemi
53 Caratteristiche dei Sistemi Risposta a un disturbo a gradino Risposta al disturbo per K a = 80. NOTA Per ridurre ulteriormente l effetto del disturbo, potrebbe essere necessario aumentare K a tuttavia la risposta del sistema risulterebbe troppo oscillatoria.
54 Prestazione dei sistemi
55 Obiettivo Prestazione dei sistemi Ottenere una risposta più rapida ad un ingresso a gradino e contemporaneamente: (1) limitare la sovraelongazione e la natura oscillatoria della risposta; (2) ridurre l effetto di un disturbo sulla posizione di uscita della testina di lettura.
56 Prestazione dei sistemi Consideriamo il modello del secondo ordine del motore e del braccio che si ottiene trascurando l effetto dell induttanza dell avvolgimento ( ) Schemi a blocchi del sistema di controllo con un modello del secondo ordine per il motore e il carico.
57 Prestazione dei sistemi Risposta del sistema a ciclo chiuso
58 Prestazione dei sistemi Risposta del sistema a un ingresso a gradino unitario, r(t) = 1, t > 0. Risposta per K a = 30 e 60.
59 Prestazione dei sistemi Risposta del sistema a un disturbo a gradino unitario, T d (s) = 1/s. Risposta per K a = 30 e 60.
60 Prestazione dei sistemi Valore ottimale
61 Stabilità dei sistemi
62 Stabilità dei sistemi Progetto di un sistema di controllo Si considera una diversa configurazione del sistema per migliorarne le prestazioni aggiungendo un sensore di velocità nel loop
63 Stabilità dei sistemi Sistema ad anello chiuso per l azionamento della testina del disco con una retroazione opzionale di velocità.
64 Inizialmente consideriamo l interruttore aperto riconducendoci al caso precedente e calcoliamo la f.d.t. Stabilità dei sistemi Equazione caratteristica Tabella di Routh
65 Stabilità dei sistemi Tabella di Routh Stabilità marginale Equazione ausiliaria Stabilità Il sistema risulta stabile se
66 Stabilità dei sistemi Retroazione di velocità Sistema equivalente con l anello di velocità chiuso.
67 Stabilità dei sistemi Equazione caratteristica Tabella di Routh Per garantire la stabilità è necessario scegliere le coppie di guadagni in modo che quando
68 Stabilità dei sistemi Risposta del sistema con retroazione di velocità con K a = 100 e K 1 = 0.05
69 Metodo del luogo delle radici
70 Metodo del luogo delle radici Obiettivo Utilizziamo il luogo delle radici per definire i guadagni di un controllore PID per il sistema con controllo di velocità Controllore PID Poiché il modello contiene un polo nell origine, poniamo il guadagno dell azione integrale pari a zero Controllore PD Sistema di controllo del disco con un controllore PD.
71 Metodo del luogo delle radici Sistema di controllo del disco con un controllore PD. Fdt ad anello chiuso Allo scopo di ottenere il luogo delle radici come funzione di un parametro pongo: Usiamo K P per selezionare la posizione dello zero z e per tracciare il luogo in funzione di K D
72 Metodo del luogo delle radici Poniamo z=1 Il numero di poli meno il numero degli zeri è 2 quindi si avranno due asintoti con e centro stella Matlab Code s=tf( s ); G=(5000*KD*(s+1))/(s*(s+20)*(s+1000) Rlocus(sys)
73 Metodo del luogo delle radici Tracciamento del luogo delle radici
74 Metodo del luogo delle radici
Organizzazione della memoria
 Memorizzazione dati La fase di codifica permette di esprimere qualsiasi informazione (numeri, testo, immagini, ecc) come stringhe di bit: Es: di immagine 00001001100110010010001100110010011001010010100010
Memorizzazione dati La fase di codifica permette di esprimere qualsiasi informazione (numeri, testo, immagini, ecc) come stringhe di bit: Es: di immagine 00001001100110010010001100110010011001010010100010
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA
 MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
6 Cenni sulla dinamica dei motori in corrente continua
 6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
Lezione 16. Motori elettrici: introduzione
 Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Fondamenti di macchine elettriche Corso SSIS 2006/07
 9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Regole della mano destra.
 Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Modellistica e controllo dei motori in corrente continua
 Modellistica e controllo dei motori in corrente continua Note per le lezioni del corso di Controlli Automatici A.A. 2008/09 Prof.ssa Maria Elena Valcher 1 Modellistica Un motore in corrente continua si
Modellistica e controllo dei motori in corrente continua Note per le lezioni del corso di Controlli Automatici A.A. 2008/09 Prof.ssa Maria Elena Valcher 1 Modellistica Un motore in corrente continua si
APPUNTI SUL CAMPO MAGNETICO ROTANTE
 APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO. Prof. Silvio Stasi Dott. Ing. Nadia Salvatore Dott. Ing. Michele Debenedictis
 CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO SCHEMA DELL AZIONAMENTO A CATENA APERTA AZIONAMENTO L azionamento a catena aperta comprende il motore asincrono e il relativo convertitore statico che riceve
CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO SCHEMA DELL AZIONAMENTO A CATENA APERTA AZIONAMENTO L azionamento a catena aperta comprende il motore asincrono e il relativo convertitore statico che riceve
Lez. 5 Memorie Secondarie
 Prof. Giovanni Mettivier 1 Dott. Giovanni Mettivier, PhD Dipartimento Scienze Fisiche Università di Napoli Federico II Compl. Univ. Monte S.Angelo Via Cintia, I-80126, Napoli mettivier@na.infn.it +39-081-676137
Prof. Giovanni Mettivier 1 Dott. Giovanni Mettivier, PhD Dipartimento Scienze Fisiche Università di Napoli Federico II Compl. Univ. Monte S.Angelo Via Cintia, I-80126, Napoli mettivier@na.infn.it +39-081-676137
Sistemi Elettrici. Debora Botturi ALTAIR. http://metropolis.sci.univr.it. Debora Botturi. Laboratorio di Sistemi e Segnali
 Sistemi Elettrici ALTAIR http://metropolis.sci.univr.it Argomenti Osservazioni generali Argomenti Argomenti Osservazioni generali Componenti di base: resistori, sorgenti elettriche, capacitori, induttori
Sistemi Elettrici ALTAIR http://metropolis.sci.univr.it Argomenti Osservazioni generali Argomenti Argomenti Osservazioni generali Componenti di base: resistori, sorgenti elettriche, capacitori, induttori
Motore passo passo: Laboratorio di Elettronica 1
 Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
I motori elettrici più diffusi
 I motori elettrici più diffusi Corrente continua Trifase ad induzione Altri Motori: Monofase Rotore avvolto (Collettore) Sincroni AC Servomotori Passo Passo Motore in Corrente Continua Gli avvolgimenti
I motori elettrici più diffusi Corrente continua Trifase ad induzione Altri Motori: Monofase Rotore avvolto (Collettore) Sincroni AC Servomotori Passo Passo Motore in Corrente Continua Gli avvolgimenti
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
G UI D A AL R E C U P E RO DEI DAT I D A T A R E C O V E R Y d a H A R D D I S K
 G UI D A AL R E C U P E RO DEI DAT I D A T A R E C O V E R Y d a H A R D D I S K Recupero dati professionale, software e in camera bianca, da ogni marca e modello Seagate, Maxtor, Hitachi, Toshiba, Western
G UI D A AL R E C U P E RO DEI DAT I D A T A R E C O V E R Y d a H A R D D I S K Recupero dati professionale, software e in camera bianca, da ogni marca e modello Seagate, Maxtor, Hitachi, Toshiba, Western
Il motore a corrente continua, chiamato così perché per. funzionare deve essere alimentato con tensione e corrente
 1.1 Il motore a corrente continua Il motore a corrente continua, chiamato così perché per funzionare deve essere alimentato con tensione e corrente costante, è costituito, come gli altri motori da due
1.1 Il motore a corrente continua Il motore a corrente continua, chiamato così perché per funzionare deve essere alimentato con tensione e corrente costante, è costituito, come gli altri motori da due
Le macchine elettriche
 Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Gli attuatori. Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo
 Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini
 Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
Strane anomalie di un motore omopolare Di Valerio Rizzi e Giorgio Giurini Gli scriventi, in qualità di studiosi del generatore omopolare hanno deciso di costruire questo motore per cercare di capire le
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P39 10. Serie P42 12. Serie P57 14. Serie P60 16. Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Il polo magnetico: simulazione nel tempo
 Corso di Elettrotecnica Industriale Professore Paolo Di Barba Il polo magnetico: simulazione nel tempo Anno Accademico 2013/2014 Lo scopo dell esercizio è quello di valutare l andamento del campo magnetico
Corso di Elettrotecnica Industriale Professore Paolo Di Barba Il polo magnetico: simulazione nel tempo Anno Accademico 2013/2014 Lo scopo dell esercizio è quello di valutare l andamento del campo magnetico
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Rappresentazione nello spazio degli stati
 Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
SISTEMA DI ATTUAZIONE DEI GIUNTI
 SISTEMA DI ATTUAZIONE DEI GIUNTI Organi di trasmissione Moto dei giunti basse velocità elevate coppie Ruote dentate variano l asse di rotazione e/o traslano il punto di applicazione denti a sezione larga
SISTEMA DI ATTUAZIONE DEI GIUNTI Organi di trasmissione Moto dei giunti basse velocità elevate coppie Ruote dentate variano l asse di rotazione e/o traslano il punto di applicazione denti a sezione larga
La caratteristica meccanica rappresenta l'andamento della coppia motrice C in
 MOTORI CORRENTE ALTERNATA: CARATTERISTICA MECCANICA La caratteristica meccanica rappresenta l'andamento della coppia motrice C in funzione della velocità di rotazione del rotore n r Alla partenza la C
MOTORI CORRENTE ALTERNATA: CARATTERISTICA MECCANICA La caratteristica meccanica rappresenta l'andamento della coppia motrice C in funzione della velocità di rotazione del rotore n r Alla partenza la C
INTRODUZIONE ALLA CONVERSIONE ELETTROMECCANICA
 INTRODUZIONE ALLA CONVERSIONE ELETTROMECCANICA Il trasferimento dell energia dalle fonti primarie (petrolio, metano, risorse idriche, eoliche, solari, ecc.) agli utilizzatori passa attraverso molteplici
INTRODUZIONE ALLA CONVERSIONE ELETTROMECCANICA Il trasferimento dell energia dalle fonti primarie (petrolio, metano, risorse idriche, eoliche, solari, ecc.) agli utilizzatori passa attraverso molteplici
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici.
 GLI ATTUATORI Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici. La casistica è assai vasta ; sono comuni i semplici azionamenti magnetici (elettromagneti
GLI ATTUATORI Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici. La casistica è assai vasta ; sono comuni i semplici azionamenti magnetici (elettromagneti
Servomeccanismi 1. Cassa. Albero. 1. Il motore elettrico in corrente continua
 Servomeccanismi 1 1. Il motore elettrico in corrente continua Descrizione fisica Il motore è contenuto in una cassa che in genere è cilindrica. Da una base del cilindro fuoriesce l albero motore; sulla
Servomeccanismi 1 1. Il motore elettrico in corrente continua Descrizione fisica Il motore è contenuto in una cassa che in genere è cilindrica. Da una base del cilindro fuoriesce l albero motore; sulla
ELETTRONICA. L amplificatore Operazionale
 ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
PROVE SULLA MACCHINA A CORRENTE CONTINUA
 LABORATORIO DI MACCHINE ELETTRICHE PROVE SULLA MACCHINA A CORRENTE CONTINUA PROVE SULLA MACCHINA A C. C. Contenuti Le prove di laboratorio che verranno prese in esame riguardano: la misura a freddo, in
LABORATORIO DI MACCHINE ELETTRICHE PROVE SULLA MACCHINA A CORRENTE CONTINUA PROVE SULLA MACCHINA A C. C. Contenuti Le prove di laboratorio che verranno prese in esame riguardano: la misura a freddo, in
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
Materiali per il modulo 1 ECDL. Autore: M. Lanino
 Materiali per il modulo 1 ECDL Autore: M. Lanino RAM, l'acronimo per "random access memory", ovvero "memoria ad acceso casuale", è la memoria in cui vengono caricati i dati che devono essere utilizzati
Materiali per il modulo 1 ECDL Autore: M. Lanino RAM, l'acronimo per "random access memory", ovvero "memoria ad acceso casuale", è la memoria in cui vengono caricati i dati che devono essere utilizzati
Informatica - A.A. 2010/11
 Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
Sensori a effetto Hall bipolari con ritenuta stabilizzati e non stabilizzati con circuito chopper
 Sensori a effetto Hall bipolari con ritenuta stabilizzati e non stabilizzati con circuito chopper I risultati dei test mostrano che è possibile ottenere prestazioni significativamente maggiori impiegando
Sensori a effetto Hall bipolari con ritenuta stabilizzati e non stabilizzati con circuito chopper I risultati dei test mostrano che è possibile ottenere prestazioni significativamente maggiori impiegando
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Ministero dell Istruzione, dell Università e della Ricerca M334 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE
 Ministero dell Istruzione, dell Università e della Ricerca M334 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTROTECNICA E AUTOMAZIONE Tema di: ELETTROTECNICA (Testo
Ministero dell Istruzione, dell Università e della Ricerca M334 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTROTECNICA E AUTOMAZIONE Tema di: ELETTROTECNICA (Testo
nei materiali (Inserendo un materiale all interno di un campo magnetico generato da un magnete permanente)
") COMPORTAMENTO MAGNETICO DEI MATERIALI a) nel vuoto B = μ0 H μ0 = 4 π 10-7 H/m b) nei materiali (Inserendo un materiale all interno di un campo magnetico generato da un magnete permanente) Il materiale
COMPORTAMENTO MAGNETICO DEI MATERIALI a) nel vuoto B = μ0 H μ0 = 4 π 10-7 H/m b) nei materiali (Inserendo un materiale all interno di un campo magnetico generato da un magnete permanente) Il materiale
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Laboratorio di Informatica di Base Archivi e Basi di Dati
 Laboratorio di Informatica di Base Archivi e Basi di Dati Introduzione La memorizzazione dei dati è un aspetto molto importante dell informatica Oggi, mediante i computer, è possibile memorizzare e modificare
Laboratorio di Informatica di Base Archivi e Basi di Dati Introduzione La memorizzazione dei dati è un aspetto molto importante dell informatica Oggi, mediante i computer, è possibile memorizzare e modificare
Architettura dei calcolatori II parte Memorie
 Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Informatica ed Elementi di Statistica 3 c.f.u. Anno Accademico 2010/2011 Docente: ing. Salvatore Sorce Architettura dei calcolatori
Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Informatica ed Elementi di Statistica 3 c.f.u. Anno Accademico 2010/2011 Docente: ing. Salvatore Sorce Architettura dei calcolatori
Architettura dei computer
 Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore (CPU) la memoria principale (RAM) la memoria secondaria i dispositivi di input/output Il processore
Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore (CPU) la memoria principale (RAM) la memoria secondaria i dispositivi di input/output Il processore
Azionamenti in Corrente Continua
 Convertitori La tensione variabile necessaria per regolare la velocità in un motore a c.c. può essere ottenuta utilizzando, a seconda dei casi, due tipi di convertitori: raddrizzatori controllati (convertitori
Convertitori La tensione variabile necessaria per regolare la velocità in un motore a c.c. può essere ottenuta utilizzando, a seconda dei casi, due tipi di convertitori: raddrizzatori controllati (convertitori
Informatica 1 Lezione 1
 Informatica 1 Lezione 1 Concetti base: Hardware È l insieme delle parti fisiche, elettroniche e meccaniche che compongono il computer, quali il chip, il mouse, il lettore CDROM, il monitor, le schede,
Informatica 1 Lezione 1 Concetti base: Hardware È l insieme delle parti fisiche, elettroniche e meccaniche che compongono il computer, quali il chip, il mouse, il lettore CDROM, il monitor, le schede,
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI E TRASFORMATORI
 INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI E TRASFORMATORI DL 1010B DL 1010D DL 1012Z KIT PER TRASFORMATORI E MOTORI KIT PER IL MONTAGGIO
INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI E TRASFORMATORI DL 1010B DL 1010D DL 1012Z KIT PER TRASFORMATORI E MOTORI KIT PER IL MONTAGGIO
Le memorie di massa. Il disco floppy 1
 Le memorie di massa Tutti i sistemi di elaborazione dispongono di alcuni supporti per memorizzare permanentemente le informazioni: le memorie di massa Dischetti o floppy disk Dischi fissi o hard disk CD
Le memorie di massa Tutti i sistemi di elaborazione dispongono di alcuni supporti per memorizzare permanentemente le informazioni: le memorie di massa Dischetti o floppy disk Dischi fissi o hard disk CD
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Generazione campo magnetico
 ELETTRO-MAGNETISMO Fra magnetismo ed elettricità esistono stretti rapporti: La corrente elettrica genera un campo magnetico; Un campo magnetico può generare elettricità. Generazione campo magnetico Corrente
ELETTRO-MAGNETISMO Fra magnetismo ed elettricità esistono stretti rapporti: La corrente elettrica genera un campo magnetico; Un campo magnetico può generare elettricità. Generazione campo magnetico Corrente
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Redundant Array of Inexpensive (Independent) Disks. Disco magnetico
 Disks. Disco magnetico") 26/5/25 RAID Redundant Array of Inexpensive (Independent) Disks Disco magnetico Costituito da un insieme di piatti rotanti (da a 5) Piatti rivestiti di una superficie magnetica Esiste una testina (bobina)
26/5/25 RAID Redundant Array of Inexpensive (Independent) Disks Disco magnetico Costituito da un insieme di piatti rotanti (da a 5) Piatti rivestiti di una superficie magnetica Esiste una testina (bobina)
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
Esercizio 20 - tema di meccanica applicata e macchine a fluido- 2002
 Esercizio 0 - tema di meccanica applicata e macchine a fluido- 00 er regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull albero di trasmissione del motore un volano in ghisa.
Esercizio 0 - tema di meccanica applicata e macchine a fluido- 00 er regolare il regime di rotazione di un gruppo elettrogeno, viene calettato sull albero di trasmissione del motore un volano in ghisa.
FISICA DELLA BICICLETTA
 FISICA DELLA BICICLETTA Con immagini scelte dalla 3 SB PREMESSA: LEGGI FISICHE Velocità periferica (tangenziale) del moto circolare uniforme : v = 2πr / T = 2πrf Velocità angolare: ω = θ / t ; per un giro
FISICA DELLA BICICLETTA Con immagini scelte dalla 3 SB PREMESSA: LEGGI FISICHE Velocità periferica (tangenziale) del moto circolare uniforme : v = 2πr / T = 2πrf Velocità angolare: ω = θ / t ; per un giro
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
Capitolo 9 Introduzione alle macchine elettriche
 Capitolo 9 Introduzione alle macchine elettriche Sezione 9.1: Macchine elettriche rotanti Problema 9.1 Relazione tra potenza nominale e temperatura ambiente mostrata in tabella. Un motore con funziona
Capitolo 9 Introduzione alle macchine elettriche Sezione 9.1: Macchine elettriche rotanti Problema 9.1 Relazione tra potenza nominale e temperatura ambiente mostrata in tabella. Un motore con funziona
Relazione Tecnica Progetto dell Impianto Elettrico
 Relazione Tecnica Progetto dell Impianto Elettrico Rotatoria ingresso cittadella universitaria Premessa: La presente relazione tecnica è finalizzata ad indicare la caratteristiche dei principali componenti
Relazione Tecnica Progetto dell Impianto Elettrico Rotatoria ingresso cittadella universitaria Premessa: La presente relazione tecnica è finalizzata ad indicare la caratteristiche dei principali componenti
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198
 SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
Calcolatori Elettronici
 Calcolatori Elettronici La memoria gerarchica L hard disk Introduzione alla memoria virtuale Scendiamo di un altro livello CPU Banco Cache Memoria principale Memoria secondaria Dimensioni < 1KB < 1 MB
Calcolatori Elettronici La memoria gerarchica L hard disk Introduzione alla memoria virtuale Scendiamo di un altro livello CPU Banco Cache Memoria principale Memoria secondaria Dimensioni < 1KB < 1 MB
Integrated Comfort SyStemS
 Integrated Comfort Systems EST (Energy Saving Technology) è una tecnologia applicata ai ventilconvettori e cassette EURAPO che consente di ottenere assorbimenti elettrici estremamente contenuti e una modulazione
Integrated Comfort Systems EST (Energy Saving Technology) è una tecnologia applicata ai ventilconvettori e cassette EURAPO che consente di ottenere assorbimenti elettrici estremamente contenuti e una modulazione
CORRENTE E TENSIONE ELETTRICA LA CORRENTE ELETTRICA
 CORRENTE E TENSIONE ELETTRICA La conoscenza delle grandezze elettriche fondamentali (corrente e tensione) è indispensabile per definire lo stato di un circuito elettrico. LA CORRENTE ELETTRICA DEFINIZIONE:
CORRENTE E TENSIONE ELETTRICA La conoscenza delle grandezze elettriche fondamentali (corrente e tensione) è indispensabile per definire lo stato di un circuito elettrico. LA CORRENTE ELETTRICA DEFINIZIONE:
Struttura del Calcolatore Corso di Abilità Informatiche Laurea in Fisica. prof. Corrado Santoro
 Struttura del Calcolatore Corso di Abilità Informatiche Laurea in Fisica prof. Corrado Santoro La prima macchina programmabile Conoscete queste macchine? Telai Jacquard (primi anni del 1800) Macchina per
Struttura del Calcolatore Corso di Abilità Informatiche Laurea in Fisica prof. Corrado Santoro La prima macchina programmabile Conoscete queste macchine? Telai Jacquard (primi anni del 1800) Macchina per
metodi di conversione, tipi di conversioni e schemi Alimentatori lineari
 Elettronica per l informatica 1 Contenuto dell unità D Conversione dell energia metodi di conversione, tipi di conversioni e schemi Alimentatori lineari componentistica e tecnologie riferimenti di tensione,
Elettronica per l informatica 1 Contenuto dell unità D Conversione dell energia metodi di conversione, tipi di conversioni e schemi Alimentatori lineari componentistica e tecnologie riferimenti di tensione,
Controllo di un Motore Elettrico in Corrente Continua
 Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
Capitolo 10 Macchine elettriche speciali
 Capitolo 10 Macchine elettriche speciali Sezione 10.1: Motori DC senza spazzole Problema 10.1 Macchina sincrona bifase a sei poli a magnete permanente. L ampiezza della tensione di fase a circuito aperto
Capitolo 10 Macchine elettriche speciali Sezione 10.1: Motori DC senza spazzole Problema 10.1 Macchina sincrona bifase a sei poli a magnete permanente. L ampiezza della tensione di fase a circuito aperto
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
19 Il campo elettrico - 3. Le linee del campo elettrico
 Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica. http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
Scelta e verifica dei motori elettrici per gli azionamenti di un mezzo di trazione leggera
 Scelta e verifica dei motori elettrici per gli azionamenti di un mezzo di trazione leggera Si consideri un convoglio ferroviario per la trazione leggera costituito da un unità di trazione, la quale è formata
Scelta e verifica dei motori elettrici per gli azionamenti di un mezzo di trazione leggera Si consideri un convoglio ferroviario per la trazione leggera costituito da un unità di trazione, la quale è formata
Estensimetro. in variazioni di resistenza.
 Estensimetro La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la variazione di geometria che l oggetto in questione subisce. L estensimetro estensimetro,
Estensimetro La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la variazione di geometria che l oggetto in questione subisce. L estensimetro estensimetro,
E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTROLLO di un MOTORE ELETTRICO a CORRENTE CONTINUA
 E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTOLLO di un MOTOE ELETTICO a COENTE CONTINUA 1. EQUAZIONI DEL MODELLO Equazioni nel dominio del tempo descrittive del Modello elettromagnetico
E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTOLLO di un MOTOE ELETTICO a COENTE CONTINUA 1. EQUAZIONI DEL MODELLO Equazioni nel dominio del tempo descrittive del Modello elettromagnetico
Protezione dai contatti indiretti
 Protezione dai contatti indiretti Se una persona entra in contatto contemporaneamente con due parti di un impianto a potenziale diverso si trova sottoposto ad una tensione che può essere pericolosa. l
Protezione dai contatti indiretti Se una persona entra in contatto contemporaneamente con due parti di un impianto a potenziale diverso si trova sottoposto ad una tensione che può essere pericolosa. l
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
11. Macchine a corrente continua. unità. 11.1 Principio di funzionamento
 11. Macchine a corrente continua unità 11.1 Principio di funzionamento Si consideri una spira rotante con velocità angolare costante e immersa in un campo magnetico costante come in figura 11.1. I lati
11. Macchine a corrente continua unità 11.1 Principio di funzionamento Si consideri una spira rotante con velocità angolare costante e immersa in un campo magnetico costante come in figura 11.1. I lati
Controllori PID, metodi di taratura e problemi d implementazione
 Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
 IL TRASFORMATORE Prof. S. Giannitto Il trasformatore è una macchina in grado di operare solo in corrente alternata, perché sfrutta i principi dell'elettromagnetismo legati ai flussi variabili. Il trasformatore
IL TRASFORMATORE Prof. S. Giannitto Il trasformatore è una macchina in grado di operare solo in corrente alternata, perché sfrutta i principi dell'elettromagnetismo legati ai flussi variabili. Il trasformatore
PRESE DI FORZA TOTALI IDROSTATICHE
 PRESE DI FORZA TOTALI IDROSTATICHE La Interpump Hydraulics ha di recente introdotto un intera gamma di prese di forza totali a trazione idrostatica come evoluzione tecnica dei modelli tradizionali già
PRESE DI FORZA TOTALI IDROSTATICHE La Interpump Hydraulics ha di recente introdotto un intera gamma di prese di forza totali a trazione idrostatica come evoluzione tecnica dei modelli tradizionali già
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
A. Maggiore Appunti dalle lezioni di Meccanica Tecnica
 Il giunto idraulico Fra i dispositivi che consentono di trasmettere potenza nel moto rotatorio, con la possibilità di variare la velocità relativa fra movente e cedente, grande importanza ha il giunto
Il giunto idraulico Fra i dispositivi che consentono di trasmettere potenza nel moto rotatorio, con la possibilità di variare la velocità relativa fra movente e cedente, grande importanza ha il giunto
Elettronica per l'informatica 24/11/03
 Contenuto dell unità D 1 Conversione dell energia metodi di conversione, tipi di conversioni e schemi Alimentatori lineari componentistica e tecnologie riferimenti di tensione, regolatori e filtri Alimentatori
Contenuto dell unità D 1 Conversione dell energia metodi di conversione, tipi di conversioni e schemi Alimentatori lineari componentistica e tecnologie riferimenti di tensione, regolatori e filtri Alimentatori
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte;
 Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
CONVERTITORI DIGITALE/ANALOGICO (DAC)
") CONVERTITORI DIGITALE/ANALOGICO (DAC) Un convertitore digitale/analogico (DAC: digital to analog converter) è un circuito che fornisce in uscita una grandezza analogica proporzionale alla parola di n bit
CONVERTITORI DIGITALE/ANALOGICO (DAC) Un convertitore digitale/analogico (DAC: digital to analog converter) è un circuito che fornisce in uscita una grandezza analogica proporzionale alla parola di n bit