Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori
|
|
|
- Ricardo Coco
- 7 anni fa
- Visualizzazioni
Transcript
1 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia Riferimenti bibliografici: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19 Fu, Gonzalez, Lee, Robotica, McGraw-Hill, Cap.6 Russel, Robot Tactile Sensing, Prentice Hall, Cap.4
2 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
3 Definizione di sensore e trasduttore SENSORE: dispositivo sensibile ad una grandezza fisica ed in grado di trasformarla in un segnale misurabile e trasferibile TRASDUTTORE: dispositivo che riceve in ingresso energia in una certa forma e produce in uscita energia in una forma diversa, secondo una relazione nota e fissata tra l ingresso e l uscita, non necessariamente per finalità di misura
4 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
5 Una prima suddivisione: sensori passivi: convertono direttamente l energia dell ingresso in energia di uscita, senza l ausilio di sorgenti esterne sensori attivi: richiedono energia dall esterno (eccitazione) per la conversione
6 Classificazione dei trasduttori Sul tipo di energia in ingresso, in ingresso o ausiliaria Radiante - onde elettromagnetiche: intensità, frequenza, polarizzazione e fase Meccanica - parametri esterni della materia: posizione, velocità, dimensione, durezza, forza Termica: temperatura, gradiente di temperatura, calore Elettrica: potenziale, corrente, resistenza, capacità Magnetica: intensità di campo, densità del flusso, permeabilità Chimica - struttura interna della materia: concentrazioni, struttura del cristallo, stato di aggregazione
7 Trasformazioni di energia in un trasduttore ENERGIA IN INGRESSO ENERGIA AUSILIARIA ENERGIA IN USCITA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE NESSUNA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE
8 Trasformazioni di energia in un trasduttore - Es: ENCODER OTTICO ENERGIA IN INGRESSO ENERGIA AUSILIARIA ENERGIA IN USCITA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE NESSUNA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE
9 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
10 Proprietà fondamentali di un sensore FUNZIONE DI TRASFERIMENTO CALIBRAZIONE (TARATURA) LINEARITÀ ISTERESI ACCURATEZZA RIPETIBILITÀ RISOLUZIONE SENSIBILITÀ SENSIBILITÀ AL RUMORE VITA UTILE STABILITÀ
11 Funzione di trasferimento La funzione di trasferimento funzione di trasferimento è la relazione tra la grandezza da acquisire e l'uscita del sensore stesso
12 Calibrazione (o Taratura ) L'operazione di calibrazione di un sensore corrisponde alla misurazione della grandezza in uscita per valori noti della grandezza in ingresso al sensore stesso. Per ciclo di calibrazione si intende una prova che copra tutto il campo di misura del sensore; la prova viene suddivisa in due parti, una per valori crescenti della grandezza e l'altra per valori decrescenti
13 Linearità Se la funzione caratteristica input/output di un sensore viene rappresentata graficamente su una scala lineare, la LINEARITÀ è un indicazione della deviazione dell output misurato del sensore rispetto ad una linea retta. La linea retta può essere scelta in vari modi. Ad es: 1) linea retta tra i punti dati dagli output del sensore relativi agli input 0 e 100% 2) linea retta che meglio approssima la curva dell output del sensore con il metodo dei minimi quadrati La linearità corrisponde al massimo scostamento, espresso in % di fondo scala, tra curva di calibrazione e una linea retta di riferimento
14 Isteresi Se un sensore è affetto da ISTERESI, per uno stesso valore di input l output può variare in funzione del fatto che l input stia crescendo o decrescendo al momento della misurazione L ISTERESI corrisponde alla massima differenza tra i due cammini di andata e di ritorno dell'uscita di un sensore durante il ciclo di calibrazione. Si esprime in percentuale del fondo scala (% f.s.).
15 Caratteristica di un sensore di contatto (array tattile)
16 Accuratezza L accuratezza accuratezza rappresenta l'errore massimo tra la grandezza reale e quella misurata
17 Ripetibilità Quando uno stesso valore di input è applicato ad un sensore, la RIPETIBILITÀ è una misura della variabilità nell output del sensore
18 Accuratezza e Ripetibilità misura accuratezza SI NO 100 (x m -x v ) / x v x m = valore medio x v = valore vero ripetibilità dispersione delle misure NO SI SI SI
19 Risoluzione La RISOLUZIONE è la minima variazione nell input che determina una variazione nell output del sensore
20 Sensibilità Una piccola variazione dell input provoca una piccola variazione corrispondente nell output. La SENSIBILITÀ è il rapporto tra la variazione dell output e la variazione dell input
21 Rumore Il RUMORE è il livello di segnale presente nell output del sensore non provocato dall input del sensore
22 Vita utile E' il tempo per il quale il sensore opera E' il tempo per il quale il sensore opera senza modificare le sue prestazioni
23 Stabilità Capacità del sensore a conservare inalterate le sue caratteristiche di funzionamento per un certo intervallo di tempo (lungo, medio, breve).
24 Altri parametri statici Tempo di risposta Range di ingresso Costo, dimensioni e peso Risposta in frequenza Fattori ambientali Temperatura max/min Tempo di warm-up Presenza di gas, fumi,.....
25 alcuni parametri dinamici drift dello zero ad esempio a causa della temperatura drift della sensibilità
26 Funzione dei sensori in un robot Percezione dello stato interno (propriocezione) Percezione dello stato esterno (esterocezione)
27 Funzione dei sensori in un robot Percezione dello stato interno: misura di variabili interne al sistema che sono usate per il controllo del robot. Ad esempio, la posizione dei giunti.
28 Funzione dei sensori in un robot Percezione dello stato esterno: misura di variabili caratterizzanti l ambiente di lavoro, quali ad esempio la distanza, la prossimità, la forza.
29 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
30 Sensori di posizione Switch Encoder ottici Potenziometri Sensori a effetto Hall
31 Switch Sensori di spostamento più semplici Forniscono un solo dato: contatto / non contatto Applicazioni come sensori di posizione: sensori di impatto su robot mobili whisker sensori di fine corsa per i giunti di un manipolatore
32 Switch meccanici LEVETTA CHE VIENE PREMUTA SE AVVIENE UN CONTATTO CONTATTO MECCANICO CHE CHIUDE UN CIRCUITO ELETTRICO V
33 Oral-Joystick: human-machine interface of a feeding assistive device for the severely disabled The Oral-Joystick is a straw-like tube for drinking with a nozzle, connected by a silicone flexible joint, in contact with four cross mechanical switches. The user can push the switches and activate specific functions of the feeding device, only with simple movements of the mouth. Silicone flexible joint Oral-Joystick Nozzle Straw 4 cross mechanical switches
34 Encoder lineari / rotativi ottici / magnetici incrementali / assoluti
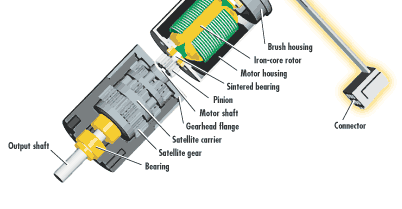
35 Encoder rotativi Ruota/link Motore Encoder Albero Motore
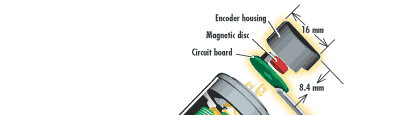
36 Encoder ottici
37 Encoder incrementale Contando gli impulsi e conoscendo il numero di linee radiali nel disco si può misurare la rotazione La frequenza del treno di impulsi è proporzionale alla velocità angolare
38 Encoder incrementale Usando due fotointerruttori si può determinare il verso della rotazione, tramite la relazione tra le fasi dei loro treni di impulsi A e B sono sfasati di ¼ di ciclo Una salita di A con B=0 corrisponde a una rotazione in senso orario Una salita di A con B=1 corrisponde a una rotazione in senso anti-orario


39 Encoder assoluto k fotointerruttori k tracce di codice Parola binaria a k bit, che rappresenta 2 k diverse orientazioni del disco Risoluzione angolare di 360 /2 k Fornisce l angolo di rotazione assoluto Ogni posizione è determinata univocamente
40 Encoder assoluto
41 Encoder assoluto Codice Gray singola transizione Decimale Binario Codice Gray
42 Encoder

43 Potenziometri Resistenza variabile L L 1 T R R = 1 T = V V output supply L 1 =R 1 L T /R T = =V output L T /V supply
44 Effetto Hall In un conduttore a forma di lamina percorso da corrente i e soggetto ad un campo magnetico di intensita' B, si origina una differenza di potenziale V in una direzione perpendicolare sia alla corrente che al campo magnetico. Il valore di tale differenza di potenziale e' proporzionale all'intensita' di corrente i e all'intensita' del campo magnetico B, mentre e' inversamente proporzionale allo spessore della lamina d: cammino V = R i B / d corrente dove R e' detta costante o coefficiente di Hall. B e -
45 Sensori a effetto Hall Sensore di prossimità a effetto Hall In assenza di oggetto da rivelare il sensore capta un forte campo magnetico emesso dal magnete permanente, mentre capta un campo più debole quando un oggetto ferromagnetico si trova nelle immediate vicinanze e varia la conformazione delle linee di forza Esempio di applicazione come sensore di posizione
 (Operational range: 0 90 degrees, Resolution: <5 degrees).")
46 Sensori a effetto Hall come sensori di posizione in robotica Detection of angular joint displacements 5+1 Encoders in the Actuation System 15 Embedded Joint Angle Sensors (Hall effect) (Operational range: 0 90 degrees, Resolution: <5 degrees).



47 Hall-effect joint angle sensors Gap
48 Esempio di applicazione di sensori a effetto Hall Guanto sensorizzato per rilevare la posizione delle dita
49 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
50 Sensori di RANGE/PROFONDITA Il range (o profondità) è la distanza tra il sensore e l oggetto rilevato. La percezione del range è importante per il riconoscimento degli oggetti e nel controllo del moto di un robot; spesso è usato insieme ad un sistema di visione per ricostruire il modello 3D di una scena Il principio fisico alla base della percezione del range è la triangolazione, ovvero la Il principio fisico alla base della percezione del range è la triangolazione, ovvero la rilevazione di un oggetto da due punti di vista differenti ad una distanza nota l uno dall altro
51 Misurazione della distanza: triangolazione Se due dispositivi a distanza nota possono puntare lo stesso punto di un oggetto, allora la distanza dell oggetto può essere calcolata conoscendo gli angoli di puntamento. TRIANGOLAZIONE PASSIVA: utilizza due dispositivi di acquisizione di immagini TRIANGOLAZIONE ATTIVA: utilizza un dispositivo di acquisizione di immagini ed una sorgente di luce controllata
52 Triangolazione passiva usando gli angoli di vergenza
53 Triangolazione passiva usando le proiezioni dello stesso punto sulle 2 immagini
54 Triangolazione passiva con telecamere
55 Triangolazione attiva
56 Triangolazione attiva con telecamera
57 Misurazione della distanza: luce strutturata E un estensione della triangolazione attiva che utilizza una figura luminosa anziché un punto luminoso e calcola la distanza in base alla distorsione della figura
58 LASER RANGE FINDERS A simple pin-hole short-range-finding sensor uses a laser diode as a light source, and a linear photo-diode array as a detector. The range from a sensor to the object is a function of the position of the maximum detected light along the array.
")
 Laser Class 1 Max.")
59 B21 LaserFinder LMS 200 Map building using the LMS 200 laser scanner Technical specification Angular Resolution 1 / 0,5 / 0,25 Response Time (ms) 13 / 26 / 53 Resolution (mm) 10 Systematic Error (mm mode) Statistic Error (1 Sigma) Laser Class 1 Max. Distance (m) 80 Data Interface +/- 15 mm 5 mm RS422 / RS232
60 Misurazione della distanza: tempo di volo La misura della distanza di un oggetto è data dalla misura del tempo che un dato segnale impiega a raggiungere l oggetto e a tornare indietro d = (v x t)/2 d = distanza dell oggetto v = velocità del segnale t = tempo impiegato dal segnale per raggiungere l oggetto e tornare indietro
61 Misurazione del Tempo di Volo: (esempio: radar and ultrasonic sonar) d = 0.5 t e v dove v è la velocità media degli impulsi emessi (aria o acqua) e t e è il tempo che intercorre da quando l impulso è stato emesso alla ricezione della sua eco.
62 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
63 Sensori di prossimità Percezione della presenza di un oggetto in un certo intorno spaziale Sensori ad ultrasuoni Sensori ottici, a infrarossi
64 SENSORI DI PROSSIMITA Sensori di prossimità passivi: rilevano perturbazioni nell ambiente, come ad esempio modifiche del campo magnetico o elettrico ES: sensori passivi a campo magnetico: sensori ad effetto hall Sensori di prossimità attivi: sfruttano i cambiamenti che avvengono ad un segnale emesso, che possono avvenire in seguito all interruzione o alla riflessione del cammino del segnale verso il ricevitore ES: sensori ottici attivi: emettitore e ricevitore di segnale luminoso
65 Sensore di prossimità a effetto Hall In assenza di un oggetto da rilevare, il sensore capta un forte campo magnetico emesso dal magnete permanente, mentre capta un campo più debole quando un oggetto ferromagnetico si trova nelle immediate vicinanze e varia la conformazione delle linee di forza

66 Sensori ad ultrasuoni 2 componenti principali: - trasduttore di ultrasuoni (che funziona sia da emettitore che da ricevitore) - elettronica per il calcolo della distanza Range: da 0.3m a 10.5m Ampiezza del fascio: 30 Accuratezza: ca. 25mm Ciclo operativo tipico: - l elettronica di controllo fa inviare ultrasuoni al trasduttore - il ricevitore viene disabilitato per un intervallo di tempo, per evitare false risposte dovute a segnale residuo nel trasduttore - il segnale ricevuto viene amplificato con un guadagno crescente, per compensare la diminuzione di intensità con la distanza - eco di ritorno che superano una certa soglia vengono prese in considerazione e associate a delle distanze calcolate in base al tempo trascorso dalla trasmissione


67 Principio di misurazione della distanza con i sensori a ultrasuoni r = 0 ct 2 0 c = velocità del suono = 343 m/s
68 Esempi di applicazione di sensori ad ultrasuoni su robot mobili




69 B21 US sensors
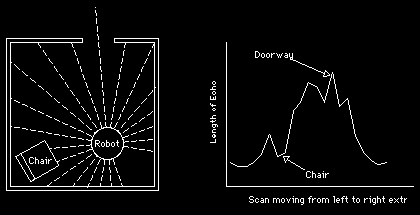
70 Funzioni dei sensori a ultrasuoni su un robot Obstacle avoidance: si assume che la prima eco rilevata misuri la distanza dell oggetto più vicino. Il robot usa questa informazione per evitare l urto Mappatura sonar: un insieme di eco acquisite con una scansione circolare o con un array di sensori a ultrasuoni viene usato per costruire una mappa dell ambiente. Similmente a uno schermo radar, un punto viene mostrato alla distanza rilevata, lungo la direzione di scansione Riconoscimento oggetti: una sequenza di eco o di mappe sonar viene elaborata per classificare strutture costituite da uno o più oggetti fisici. Quando l esito è positivo, l informazione può essere usata dal robot per la sua calibrazione o per la navigazione attraverso landmark

71 Sensori ottici



72 B21 IR sensors Sharp GP2D02 IR Distance Measuring Sensor
73 Sommario della lezione Definizione di sensore e di trasduttore Classificazione dei trasduttori Proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di prossimità: sensori a ultrasuoni e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
74 Metodi di base per la misurazione di forze 1. Mantenere l equilibrio rispetto alla forza da misurare applicata ad una massa, tramite un sistema di leve 2. Misurare l accelerazione della massa 3. Uguagliarla con una forza magnetica generata da una bobina e un magnete 4. Distribuire la forza su una specifica area per generare una pressione e poi misurare la pressione 5. Convertire la forza applicata in deformazione di un elemento elastico

75 Strutture a celle di carico Struttura esterna rigida Mezzo per misurare la forza applicata Elemento misuratore
76 Richiami di comportamento meccanico dei materiali Un materiale sottoposto a uno sforzo si deforma con comportamento elastico fino a una soglia dello sforzo (limite elastico), oltre la quale si deforma plasticamente sforzo σ = p A0 deformazione ε = l l 0 Rapporto di Poisson: δa A = ε ν 0 Modulo di elasticità: E = σ ε
77 Effetto piezoresistivo Ogni materiale varia la propria resistenza elettrica in funzione della deformazione V In un parallelepipedo metallico: con ρ = resistività del materiale, L, W, H = dimensioni del parallelepipedo R R = ε + 2νε + ρ ρ ν = rapporto di Poisson del materiale R = ρ L WH V=RI
78 Strain gauge La forma del sensore serve a renderlo più sensibile in una direzione che nell altra Fattore di Gauge: G R R = = 1+ 2ν + ε ρ ρ ε ν = rapporto di Poisson del materiale


79 Strain gauges
80 Sensori che usano strain gauge
81 Cable tension sensor
82 Sensori di forza/coppia a 3 componenti Strutture meccaniche con direzioni di deformazione preferenziali, date da indebolimenti, su 3 assi Strain gauge disposti sugli indebolimenti
83 Sensore triassiale di forza/coppia a Sensore triassiale di forza/coppia a croce di Malta croce di Malta Le forze e le coppie vengono misurate a partire dalle misure delle variazioni di resistenza degli strain gauge, moltiplicandole per una matrice di coefficienti tipica del sensore La matrice dei coefficienti si costruisce = w w w w w w w w c c c c c c c c c c c c c c c c f f f s z s y s x s z s y s x µ µ µ con una procedura di calibrazione in cui si applicano forze note

84 Sensori di Forza: applicazione
85 Sensori di Forza: applicazione
86 Esempio di utilizzo di sensori su un prototipo di robot mobile Sensori a effetto Hall sui giunti delle dita Sensore di forza/coppia sul polso (con strain gauge) Encoder sui motori del braccio e della base mobile Sensori a ultrasuoni Switch sul paraurti Potenziometri nel sistema di docking
Modulo D. Fondamenti di Robotica e Controllo
 Corso di Laurea Specialistica in Ingegneria Biomedica Corso di Bioingegneria della Riabilitazione Modulo D. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it
Corso di Laurea Specialistica in Ingegneria Biomedica Corso di Bioingegneria della Riabilitazione Modulo D. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it
Modulo B. Fondamenti di Robotica e Controllo
 Corso di Laurea Specialistica in Informatica Corso di Percezione Robotica Modulo B. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it Sommario della lezione
Corso di Laurea Specialistica in Informatica Corso di Percezione Robotica Modulo B. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it Sommario della lezione
Sensori: Proprietà Generali
 Sensori: Proprietà Generali Trasduttore / Transducer Trasduttore: (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti ad un sistema energetico
Sensori: Proprietà Generali Trasduttore / Transducer Trasduttore: (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti ad un sistema energetico
Componenti per la robotica: Sistemi di misura e Sensori propriocettivi
 Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
SISTEMA DI ACQUISIZIONE DATI
 SISTEMA DI ACQUISIZIONE DATI SENSORE O TRASDUTTORE LINEARIZZAZIONE CONDIZIONAMENTO CONVERTITORE A/D MICROPROCESSORE SENSORE LINEARIZZAZIONE Elemento che rileva la grandezza da controllare. Operazione necessaria
SISTEMA DI ACQUISIZIONE DATI SENSORE O TRASDUTTORE LINEARIZZAZIONE CONDIZIONAMENTO CONVERTITORE A/D MICROPROCESSORE SENSORE LINEARIZZAZIONE Elemento che rileva la grandezza da controllare. Operazione necessaria
Fondamenti sui Sensori applicati nella Robotica. Corso di Robotica Prof.ssa Gini Giuseppina 2006/2007
 Fondamenti sui Sensori applicati nella Robotica Ph.D Ing. Michele Folgheraiter Corso di Robotica Prof.ssa Gini Giuseppina 2006/2007 1 Funzione dei sensori nella Robotica Possiamo classificare i sensori
Fondamenti sui Sensori applicati nella Robotica Ph.D Ing. Michele Folgheraiter Corso di Robotica Prof.ssa Gini Giuseppina 2006/2007 1 Funzione dei sensori nella Robotica Possiamo classificare i sensori
Misure e Tecniche Sperimentali - Alfredo Cigada
 Misure di spostamento senza contatto 2 TRASDUTTORI A CORRENTI PARASSITE 1 Trasduttori a correnti parassite: principio di funzionamento bobina alimentata con corrente alternata ( 1 MHz) 3 superficie metallica
Misure di spostamento senza contatto 2 TRASDUTTORI A CORRENTI PARASSITE 1 Trasduttori a correnti parassite: principio di funzionamento bobina alimentata con corrente alternata ( 1 MHz) 3 superficie metallica
Appendice 3 - Cenni ai trasduttori
 Appunti di Misure Elettriche Appendice 3 - Cenni ai trasduttori Strumenti di misura per grandezze non elettriche...1 Introduzione...1 Termometri...1 Misuratori di PH (PH-meter)...2 Igrometri...2 Anemometri...2
Appunti di Misure Elettriche Appendice 3 - Cenni ai trasduttori Strumenti di misura per grandezze non elettriche...1 Introduzione...1 Termometri...1 Misuratori di PH (PH-meter)...2 Igrometri...2 Anemometri...2
Laurea in Ingegneria Elettrica Corso di Misure per l Automazione e la Produzione Industriale Caratterizzazione dei Sensori
 Laurea in Ingegneria Elettrica Corso di Misure per l Automazione e la Produzione Industriale Caratterizzazione dei Sensori (raccolta di lucidi) 1 Dovrebbe ormai essere chiaro che un sensore/trasduttore
Laurea in Ingegneria Elettrica Corso di Misure per l Automazione e la Produzione Industriale Caratterizzazione dei Sensori (raccolta di lucidi) 1 Dovrebbe ormai essere chiaro che un sensore/trasduttore
Sensori di Posizione e Velocità
 Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Lezione 10: Sensori molto elementari
 Robotica A Lezione 10: Sensori molto elementari Sensori di presenza pezzo Magnetici Capacitivi Ottici 2 1 Sensori induttivi (proximity) Funzionano solo con materiali ferromagnetici Mooolto semplici ed
Robotica A Lezione 10: Sensori molto elementari Sensori di presenza pezzo Magnetici Capacitivi Ottici 2 1 Sensori induttivi (proximity) Funzionano solo con materiali ferromagnetici Mooolto semplici ed
Sensori per la Robotica
 Sensori per la Robotica Sensori propriocettivi (PC) Misurano grandezze proprie cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione,
Sensori per la Robotica Sensori propriocettivi (PC) Misurano grandezze proprie cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione,
- converte una grandezza fisica (misurando) in un altra (più facilmente misurabile, generalmente elettrica).
 in un altra (più facilmente misurabile, generalmente elettrica).") Trasduttori Trasduttore: - converte una grandezza fisica (misurando) in un altra (più facilmente misurabile, generalmente elettrica). misurando T (gr. elettrica) - funzionamento basato su un determinato
Trasduttori Trasduttore: - converte una grandezza fisica (misurando) in un altra (più facilmente misurabile, generalmente elettrica). misurando T (gr. elettrica) - funzionamento basato su un determinato
I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di. elaborazione e gestione, hanno un profondo impatto su prodotti di larga
 CAPITOLO 1 INTRODUZIONE AI SENSORI IN FIBRA OTTICA 1.1 La sensoristica 1.1.1. Generalità I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di elaborazione e gestione, hanno un profondo
CAPITOLO 1 INTRODUZIONE AI SENSORI IN FIBRA OTTICA 1.1 La sensoristica 1.1.1. Generalità I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di elaborazione e gestione, hanno un profondo
Argomenti del corso Parte I Caratteristiche generali e strumenti terminali
 Argomenti del corso Parte I Caratteristiche generali e strumenti terminali 1. Concetti generali Finalità e applicazioni dello studio dei sistemi di misura Applicazione in vari campi: esempi Concetto di
Argomenti del corso Parte I Caratteristiche generali e strumenti terminali 1. Concetti generali Finalità e applicazioni dello studio dei sistemi di misura Applicazione in vari campi: esempi Concetto di
Encoder ROBOTICA 01CFIDV 02CFICY. AA 2006/07 Basilio Bona DAUIN Politecnico di Torino. Sensori 002/1
 Encoder Misurano la posizione o la velocità dei vari motori presenti sul robot Le misure vengono integrate per generare una stima della posizione (odometria) Forniscono misure (imprecise) rispetto al riferimento
Encoder Misurano la posizione o la velocità dei vari motori presenti sul robot Le misure vengono integrate per generare una stima della posizione (odometria) Forniscono misure (imprecise) rispetto al riferimento
Terminologia e definizioni generali
 Terminologia e definizioni generali L obiettivo di un sistema di misura è quello di fornire al sistema di controllo un indicazione sullo stato di un sistema fisico. Il modo più semplice per misurare una
Terminologia e definizioni generali L obiettivo di un sistema di misura è quello di fornire al sistema di controllo un indicazione sullo stato di un sistema fisico. Il modo più semplice per misurare una
PRINCIPI DI FISICA DEGLI ULTRASUONI. Renato Spagnolo Torino, 10 Maggio 2012
 PRINCIPI DI FISICA DEGLI ULTRASUONI Renato Spagnolo r.spagnolo@inrim.it Torino, 10 Maggio 2012 Segnale sinusoidale Frequenza f numero di oscillazioni al secondo (Hz) Periodo T durata di un oscillazione
PRINCIPI DI FISICA DEGLI ULTRASUONI Renato Spagnolo r.spagnolo@inrim.it Torino, 10 Maggio 2012 Segnale sinusoidale Frequenza f numero di oscillazioni al secondo (Hz) Periodo T durata di un oscillazione
Sensori. Elaboration Unit Actuators. Sensors. Progettazione Sistemi Elettronici 2013/ /05/2014
 Sensori Sensors Elaboration Unit Actuators 2013/2014 1 Sensori Unità di misura 2013/2014 2 Sensori Electronic characteristics Reference: Analog Devices 2013/2014 3 Sensori Caratteristiche Accuratezza:
Sensori Sensors Elaboration Unit Actuators 2013/2014 1 Sensori Unità di misura 2013/2014 2 Sensori Electronic characteristics Reference: Analog Devices 2013/2014 3 Sensori Caratteristiche Accuratezza:
Sensori per la Robotica. Corso di Robotica Prof. Vincenzo Caglioti 2005/2006
 Sensori per la Robotica PhD.. Ing. Michele Folgheraiter Corso di Robotica Prof. Vincenzo Caglioti 2005/2006 Como 1 Funzionalità dei sensori nella Robotica Possiamo classificare i sensori del Robot in 2
Sensori per la Robotica PhD.. Ing. Michele Folgheraiter Corso di Robotica Prof. Vincenzo Caglioti 2005/2006 Como 1 Funzionalità dei sensori nella Robotica Possiamo classificare i sensori del Robot in 2
ESERCITAZIONE 1 ESTENSIMETRIA
 UNIVERSITA DEGLI STUDI DI CAGLIARI FACOLTA DI INGEGNERIA E ARCHITETTURA DIPARTIMENTO DI MECCANICA, CHIMICA E MATERIALI CORSO DI LAUREA IN INGEGNERIA MECCANICA ESERCITAZIONE 1 ESTENSIMETRIA Relazione del
UNIVERSITA DEGLI STUDI DI CAGLIARI FACOLTA DI INGEGNERIA E ARCHITETTURA DIPARTIMENTO DI MECCANICA, CHIMICA E MATERIALI CORSO DI LAUREA IN INGEGNERIA MECCANICA ESERCITAZIONE 1 ESTENSIMETRIA Relazione del
Tecniche automatiche di acquisizione dati
 Tecniche automatiche di acquisizione dati Sensori Prima parte Fabio Garufi - TAADF 2005-2006 1 Dalla grandezza fisica alla Elaborazione di dati Grandezza fisica fisica Trasduzione Misura Registrazione
Tecniche automatiche di acquisizione dati Sensori Prima parte Fabio Garufi - TAADF 2005-2006 1 Dalla grandezza fisica alla Elaborazione di dati Grandezza fisica fisica Trasduzione Misura Registrazione
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
E un trasduttore digitale in grado di fornire una indicazione binaria della. Non sfruttano alcun principio fisico. Nei trasduttori lineari a principio
 TRASDUTTORI: ENCODER (detto anche CODIFICATORE OTTICO) E un trasduttore digitale in grado di fornire una indicazione binaria della grandezza fisica oggetto di misura ENCODER ASSOLUTO DI POSIZIONE Non sfruttano
TRASDUTTORI: ENCODER (detto anche CODIFICATORE OTTICO) E un trasduttore digitale in grado di fornire una indicazione binaria della grandezza fisica oggetto di misura ENCODER ASSOLUTO DI POSIZIONE Non sfruttano
Indice. Fisica: una introduzione. Il moto in due dimensioni. Moto rettilineo. Le leggi del moto di Newton
 Indice 1 Fisica: una introduzione 1.1 Parlare il linguaggio della fisica 2 1.2 Grandezze fisiche e unità di misura 3 1.3 Prefissi per le potenze di dieci e conversioni 7 1.4 Cifre significative 10 1.5
Indice 1 Fisica: una introduzione 1.1 Parlare il linguaggio della fisica 2 1.2 Grandezze fisiche e unità di misura 3 1.3 Prefissi per le potenze di dieci e conversioni 7 1.4 Cifre significative 10 1.5
Caratteristiche di trasferimento:
 Trasduttori Introduzione Il trasduttore è l elemento base della misura Per trasduttore intendiamo un dispositivo che trasforma una qualsiasi grandezza fisica in grandezza elettrica Lo scopo di tale trasformazione
Trasduttori Introduzione Il trasduttore è l elemento base della misura Per trasduttore intendiamo un dispositivo che trasforma una qualsiasi grandezza fisica in grandezza elettrica Lo scopo di tale trasformazione
Alcune esperienze di laboratorio sull elettromagnetismo
 Alcune esperienze di laboratorio sull elettromagnetismo - Scarica del condensatore A - Oscilloscopio didattico Q - Motorino elettrico A - Sistema molla-magnete Q - Trasformatore didattico A P. Bernardini
Alcune esperienze di laboratorio sull elettromagnetismo - Scarica del condensatore A - Oscilloscopio didattico Q - Motorino elettrico A - Sistema molla-magnete Q - Trasformatore didattico A P. Bernardini
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Velocimetro Vectrino
 Velocimetro Vectrino PRINCIPIO DI FUNZIONAMENTO Il Velocimetro Vectrino misura la velocità dell acqua usando l effetto Doppler. L effetto Doppler si percepisce quando passa un treno il cambiamento di tono
Velocimetro Vectrino PRINCIPIO DI FUNZIONAMENTO Il Velocimetro Vectrino misura la velocità dell acqua usando l effetto Doppler. L effetto Doppler si percepisce quando passa un treno il cambiamento di tono
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Lezione 3: Il problema della localizzazione
 Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Analogamente,sfruttando la variabilità della resistenza in funzione degli sforzi meccanici di trazione o di compressione,si realizzano gli
 SENSORI fig. 7 In un sistema di acquisizione dati i sensori costituiscono le interfacce fisiche tra i dispositivi di elaborazione dei segnali elettrici acquisiti e le corrispondenti grandezze fisiche da
SENSORI fig. 7 In un sistema di acquisizione dati i sensori costituiscono le interfacce fisiche tra i dispositivi di elaborazione dei segnali elettrici acquisiti e le corrispondenti grandezze fisiche da
Trasduttori. Molti trasduttori sono sia sensori sia attuatori.
 Trasduttori Sono dispositivi, generalmente elettrici o elettronici, che convertono un tipo di energia relativa a grandezze meccaniche e fisiche in segnali elettrici. Un trasduttore è talvolta definito
Trasduttori Sono dispositivi, generalmente elettrici o elettronici, che convertono un tipo di energia relativa a grandezze meccaniche e fisiche in segnali elettrici. Un trasduttore è talvolta definito
Sensori e Trasduttori
 Sensori e Trasduttori Sensori e Trasduttori Le parole sensore (più usata negli USA) e trasduttore (più comune in Europa) sono entrambe molto utilizzate nella descrizione dei sistemi di misura e controllo.
Sensori e Trasduttori Sensori e Trasduttori Le parole sensore (più usata negli USA) e trasduttore (più comune in Europa) sono entrambe molto utilizzate nella descrizione dei sistemi di misura e controllo.
Acquisizione Dati. Introduzione
 UNIVERSITÀ DEGLI STUDI DI CAGLIARI Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali Corso di Sperimentazione sulle Macchine Acquisizione Dati Introduzione Introduzione In campo scientifico
UNIVERSITÀ DEGLI STUDI DI CAGLIARI Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali Corso di Sperimentazione sulle Macchine Acquisizione Dati Introduzione Introduzione In campo scientifico
Misure di livello con sensori di prossimità Sonar SIMATIC PXS
 Misure di livello con sensori di prossimità Sonar SIMATIC PXS Nel misurare il livello di riempimento di un contenitore è spesso necessario determinare l altezza che assume il materiale sfuso o il liquido
Misure di livello con sensori di prossimità Sonar SIMATIC PXS Nel misurare il livello di riempimento di un contenitore è spesso necessario determinare l altezza che assume il materiale sfuso o il liquido
Acquisizione e rappresentazione di immagini
 Acquisizione e rappresentazione di immagini Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Radiazione elettromagnetica λ
Acquisizione e rappresentazione di immagini Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Radiazione elettromagnetica λ
Breve nota sulla misurazione della grandezza Forza
 Breve nota sulla misurazione della grandezza Forza 1. Introduzione In generale, si ricorre al concetto di forza in tutte quelle situazioni in cui sia necessario qualificare e quantificare l entità delle
Breve nota sulla misurazione della grandezza Forza 1. Introduzione In generale, si ricorre al concetto di forza in tutte quelle situazioni in cui sia necessario qualificare e quantificare l entità delle
Sensori di portata. A strozzamento (Obstruction meters) A sezione variabile (variable-area-flowmeters o rotameters ) A vortice (Vortex meters)
 A sezione variabile (variable-area-flowmeters o rotameters ) A vortice (Vortex meters)") Sensori di portata Tipi di sensore di portata (flussimetri, flowmeters) A strozzamento (Obstruction meters) A sezione variabile (variable-area-flowmeters o rotameters ) A vortice (Vortex meters) Elettromagnetici
Sensori di portata Tipi di sensore di portata (flussimetri, flowmeters) A strozzamento (Obstruction meters) A sezione variabile (variable-area-flowmeters o rotameters ) A vortice (Vortex meters) Elettromagnetici
Lavoro. Esempio. Definizione di lavoro. Lavoro motore e lavoro resistente. Lavoro compiuto da più forze ENERGIA, LAVORO E PRINCIPI DI CONSERVAZIONE
 Lavoro ENERGIA, LAVORO E PRINCIPI DI CONSERVAZIONE Cos è il lavoro? Il lavoro è la grandezza fisica che mette in relazione spostamento e forza. Il lavoro dipende sia dalla direzione della forza sia dalla
Lavoro ENERGIA, LAVORO E PRINCIPI DI CONSERVAZIONE Cos è il lavoro? Il lavoro è la grandezza fisica che mette in relazione spostamento e forza. Il lavoro dipende sia dalla direzione della forza sia dalla
SENSORE DI TENSIONE SP
 SENSORE DI TENSIONE SP3000-01 2 Sensore di tensione per la cattura di segnali elettrici senza contatto metallico sul conduttore L ingegneria elettronica è spesso chiamata a misurare impulsi di breve durata
SENSORE DI TENSIONE SP3000-01 2 Sensore di tensione per la cattura di segnali elettrici senza contatto metallico sul conduttore L ingegneria elettronica è spesso chiamata a misurare impulsi di breve durata
VARIABILI DI INTERESSE
 Sistemi Energetici VARIABILI DI INTERESSE composizione fluidi pressioni temperature titolo miscele portate potenze/energie elettriche potenze/energie meccaniche flussi termici / calore tempi velocità di
Sistemi Energetici VARIABILI DI INTERESSE composizione fluidi pressioni temperature titolo miscele portate potenze/energie elettriche potenze/energie meccaniche flussi termici / calore tempi velocità di
Trasduttori. - converte una grandezza fisica (misurando) in un altra (più facilmente misurabile, generalmente elettrica).
 in un altra (più facilmente misurabile, generalmente elettrica).") Trasduttori Trasduttore: - converte una grandezza fisica (misurando) in un altra (più facilmente misurabile, generalmente elettrica). misurando T (gr. elettrica) - funzionamento basato su un determinato
Trasduttori Trasduttore: - converte una grandezza fisica (misurando) in un altra (più facilmente misurabile, generalmente elettrica). misurando T (gr. elettrica) - funzionamento basato su un determinato
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA. OBIETTIVI U. D. n 1.2: La rappresentazione di dati e fenomeni
 FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
Elementi di base delle vibrazioni meccaniche
 Elementi di base delle vibrazioni meccaniche Vibrazioni Le vibrazioni sono fenomeni dinamici che ci circondano costantemente. La luce, il suono, il calore sono i fenomeni vibratori a noi più evidenti.
Elementi di base delle vibrazioni meccaniche Vibrazioni Le vibrazioni sono fenomeni dinamici che ci circondano costantemente. La luce, il suono, il calore sono i fenomeni vibratori a noi più evidenti.
INTRODUZIONE 11 INDICAZIONI PER I PARTECIPANTI AI CORSI ALPHA TEST 19
 INDICE INTRODUZIONE 11 SUGGERIMENTI PER AFFRONTARE LA PROVA A TEST 13 Bando di concorso e informazioni sulla selezione...13 Regolamento e istruzioni per lo svolgimento della prova...13 Domande a risposta
INDICE INTRODUZIONE 11 SUGGERIMENTI PER AFFRONTARE LA PROVA A TEST 13 Bando di concorso e informazioni sulla selezione...13 Regolamento e istruzioni per lo svolgimento della prova...13 Domande a risposta
Conoscenze FISICA LES CLASSE TERZA SAPERI MINIMI
 FISICA LES SAPERI MINIMI CLASSE TERZA LE GRANDEZZE FISICHE E LA LORO MISURA Nuovi principi per indagare la natura. Il concetto di grandezza fisica. Misurare una grandezza fisica. L impossibilità di ottenere
FISICA LES SAPERI MINIMI CLASSE TERZA LE GRANDEZZE FISICHE E LA LORO MISURA Nuovi principi per indagare la natura. Il concetto di grandezza fisica. Misurare una grandezza fisica. L impossibilità di ottenere
I.P.S.I.A. Di BOCCHIGLIERO
 I.P.S.I.A. Di BOCCHIGLIRO a.s. 2012/2013 -classe V- Materia: Sistemi, automazione e organizzazione della produzione ---- rasduttori di velocità ---- alunno: prof. Ing. Zumpano Luigi Chindamo Michelangelo
I.P.S.I.A. Di BOCCHIGLIRO a.s. 2012/2013 -classe V- Materia: Sistemi, automazione e organizzazione della produzione ---- rasduttori di velocità ---- alunno: prof. Ing. Zumpano Luigi Chindamo Michelangelo
Misure Elettriche ed Elettroniche
 Misure Elettriche ed Elettroniche Università degli Studi di Sassari Facoltà di Medicina e Chirurgia Corso di Laurea in Tecniche Audioprotesiche Tecniche di Laboratorio Biomedico Anno Accademico 2011/2012
Misure Elettriche ed Elettroniche Università degli Studi di Sassari Facoltà di Medicina e Chirurgia Corso di Laurea in Tecniche Audioprotesiche Tecniche di Laboratorio Biomedico Anno Accademico 2011/2012
Strumenti di Misura. Strumento di Misura
 Strumenti di Misura Le misure in fisica si ottengono attraverso gli strumenti di misura, dispositivi che possono essere sia molto semplici (come un righello) sia molto complessi come i rivelatori attualmente
Strumenti di Misura Le misure in fisica si ottengono attraverso gli strumenti di misura, dispositivi che possono essere sia molto semplici (come un righello) sia molto complessi come i rivelatori attualmente
I trasduttori Classificazione dei trasduttori
 I trasduttori 1 Classificazione dei trasduttori Segnale Politecnico di Torino 1 Classificazione per segnale Digitale registrazione con incrementi finiti elevata precisione grazie alla misura direttamente
I trasduttori 1 Classificazione dei trasduttori Segnale Politecnico di Torino 1 Classificazione per segnale Digitale registrazione con incrementi finiti elevata precisione grazie alla misura direttamente
ALMENO UN ORDINE DI GRANDEZZA
 Taratura statica Taratura statica L'analisi delle caratteristiche statiche di un singolo trasduttore o di un sistema di misura (catena di trasduttori) ponendoli in un ambiente controllato costituisce la
Taratura statica Taratura statica L'analisi delle caratteristiche statiche di un singolo trasduttore o di un sistema di misura (catena di trasduttori) ponendoli in un ambiente controllato costituisce la
Lezione 9: Sensorialità
 Robotica Robot Industriali e di Servizio Lezione 9: Sensorialità Sensorialità Per funzionare, un robot ha assoluto bisogno di sensori Esistono molte classificazioni dei sensori che possono essere utilizzati
Robotica Robot Industriali e di Servizio Lezione 9: Sensorialità Sensorialità Per funzionare, un robot ha assoluto bisogno di sensori Esistono molte classificazioni dei sensori che possono essere utilizzati
E. Arri e S. Sartori: Le Misure di grandezze fisiche, TSP-Paravia; E. Doebelin: Mesurement systems, Mc Graw Hill;
 Supporti didattici E. Arri e S. Sartori: Le Misure di grandezze fisiche, TSP-Paravia; E. Doebelin: Mesurement systems, Mc Graw Hill; Pallas-Areny J.G. Webster: Sensors and Signal Conditioning; (disponibili
Supporti didattici E. Arri e S. Sartori: Le Misure di grandezze fisiche, TSP-Paravia; E. Doebelin: Mesurement systems, Mc Graw Hill; Pallas-Areny J.G. Webster: Sensors and Signal Conditioning; (disponibili
LSS ADC DAC. Piero Vicini A.A
 LSS 2016-17 ADC DAC Piero Vicini A.A. 2016-2017 Conversione Digitale-Analogica La conversione digitale-analogica (DAC, Digital to Analog Conversion) permette di costruire una tensione V (o una corrente
LSS 2016-17 ADC DAC Piero Vicini A.A. 2016-2017 Conversione Digitale-Analogica La conversione digitale-analogica (DAC, Digital to Analog Conversion) permette di costruire una tensione V (o una corrente
Progetti sui Sistemi Real Time 2012 (tipologia: HW SW) P1: Node finder
 P1: Node finder") Progetti sui Sistemi Real Time 2012 (tipologia: HW SW) P1: Node finder Leggere la potenza del segnale wireless ricevuto da un nodo trasmittente nascosto, in modo da stimare la distanza dalla sorgente.
Progetti sui Sistemi Real Time 2012 (tipologia: HW SW) P1: Node finder Leggere la potenza del segnale wireless ricevuto da un nodo trasmittente nascosto, in modo da stimare la distanza dalla sorgente.
I sensori per la robotica mobile Giovanni De Luca
 www.delucagiovanni.com deluca@lns.infn.it I sensori per la robotica mobile Sensori per la robotica Sensori per la robotica 2 Sensori per la robotica Tre famiglie principali Sensori analogici Quando i valori
www.delucagiovanni.com deluca@lns.infn.it I sensori per la robotica mobile Sensori per la robotica Sensori per la robotica 2 Sensori per la robotica Tre famiglie principali Sensori analogici Quando i valori
Power meter Misure di potenza assoluta Misure di potenza relativa. Misure di potenza. F. Poli. 10 aprile F. Poli Misure di potenza
 Misure di potenza F. Poli 10 aprile 2008 Outline Power meter 1 Power meter 2 3 Misure di potenza Misure di potenza = base della metrologia in fibra ottica. Misure di potenza 1 assoluta: necessarie in relazione
Misure di potenza F. Poli 10 aprile 2008 Outline Power meter 1 Power meter 2 3 Misure di potenza Misure di potenza = base della metrologia in fibra ottica. Misure di potenza 1 assoluta: necessarie in relazione
Quanto bene conosciamo i Segnali Sismici?
 Quanto bene conosciamo i Segnali Sismici? In generale, quello registrato non è esattamente il moto del suolo ma la risposta dell apparato strumentale a questo movimento In pratica, lo strumento provoca
Quanto bene conosciamo i Segnali Sismici? In generale, quello registrato non è esattamente il moto del suolo ma la risposta dell apparato strumentale a questo movimento In pratica, lo strumento provoca
A DISTANCE AHEAD LED SCANNER MULTIRAGGIO R2100
 A DISTANCE AHEAD LED SCANNER MULTIRAGGIO R2100 Tecnologia Una nuova dimensione per la tec La tecnologia PRT (Pulse Ranging Technology) è una metodologia di misurazione innovativa di Pepperl+Fuchs, particolarmente
A DISTANCE AHEAD LED SCANNER MULTIRAGGIO R2100 Tecnologia Una nuova dimensione per la tec La tecnologia PRT (Pulse Ranging Technology) è una metodologia di misurazione innovativa di Pepperl+Fuchs, particolarmente
Progetto di Eccellenza - OMAROBOT -
 Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
ELETTRONICA II. Prof. Dante Del Corso - Politecnico di Torino. Parte F: Conversione A/D e D/A Lezione n F - 2: Convertitori D/A
 ELETTRONICA II Prof. Dante Del Corso - Politecnico di Torino Parte F: Conversione A/D e D/A Lezione n. 25 - F - 2: Convertitori D/A Conversione A/D La conversione da Analogico a Digitale comporta due tipi
ELETTRONICA II Prof. Dante Del Corso - Politecnico di Torino Parte F: Conversione A/D e D/A Lezione n. 25 - F - 2: Convertitori D/A Conversione A/D La conversione da Analogico a Digitale comporta due tipi
Metallurgia e Materiali non Metallici. Prova di trazione. Marco Colombo.
 Metallurgia e Materiali non Metallici Prova di trazione Marco Colombo marco1.colombo@polimi.it 16/03/2016 La prova di trazione uniassiale Una delle più comuni e importanti prove distruttive, si ricavano
Metallurgia e Materiali non Metallici Prova di trazione Marco Colombo marco1.colombo@polimi.it 16/03/2016 La prova di trazione uniassiale Una delle più comuni e importanti prove distruttive, si ricavano
Introduzione al concetto di funzione: macchine input - output, tabelle, grafici, formule
 PROGRAMMA EFFETTIVAMENTE SVOLTO UNICO FILE DOCENTE PATRIZIA LOCATELLI MATERIA: MATEMATICA CLASSE: 1E Domingo Paola, Michele Impedovo Matematica dappertutto Ed Zanichelli Volume A primo biennio SEZIONE
PROGRAMMA EFFETTIVAMENTE SVOLTO UNICO FILE DOCENTE PATRIZIA LOCATELLI MATERIA: MATEMATICA CLASSE: 1E Domingo Paola, Michele Impedovo Matematica dappertutto Ed Zanichelli Volume A primo biennio SEZIONE
Esperimenti di Fisica Contenuti
 Esperimenti di Fisica Contenuti D1 Meccanica D1.1 Proprietà comuni dei corpi D1.1.1 D1.1.1.1 D1.1.1.2 D1.1.1.3 D1.1.1.4 D1.1.1.5 D1.1.1.6 Volume Determinazione del volume di un solido regolare Determinazione
Esperimenti di Fisica Contenuti D1 Meccanica D1.1 Proprietà comuni dei corpi D1.1.1 D1.1.1.1 D1.1.1.2 D1.1.1.3 D1.1.1.4 D1.1.1.5 D1.1.1.6 Volume Determinazione del volume di un solido regolare Determinazione
Corso PAS Misure, strumenti ed Errori di misura. Didattica del Laboratorio di Fisica F. Garufi 2014
 Corso PAS Misure, strumenti ed Errori di misura Didattica del Laboratorio di Fisica F. Garufi 2014 Grandezze ed unità di misura grandezza (misurabile) si intende un attributo di un fenomeno, di un corpo
Corso PAS Misure, strumenti ed Errori di misura Didattica del Laboratorio di Fisica F. Garufi 2014 Grandezze ed unità di misura grandezza (misurabile) si intende un attributo di un fenomeno, di un corpo
VERIFICA SISTEMI E AUTOMAZIONE CLASSE VEL ALUNNO:... Punteggio 1 punto per ogni risposta/ esercizio corrett, tranne il secondo che vale 2
 VERIFICA SISTEMI E AUTOMAZIONE CLASSE VEL 23 10 2013 ALUNNO:... Punteggio 1 punto per ogni risposta/ esercizio corrett, tranne il secondo che vale 2 1 - La funzione del nodo di confronto all interno dei
VERIFICA SISTEMI E AUTOMAZIONE CLASSE VEL 23 10 2013 ALUNNO:... Punteggio 1 punto per ogni risposta/ esercizio corrett, tranne il secondo che vale 2 1 - La funzione del nodo di confronto all interno dei
Uso degli apparecchi elettrosensibili di protezione: cosa è necessario sapere...
 Uso degli apparecchi elettrosensibili di protezione: cosa è necessario sapere... Parte 1 della normativa IEC / EN 61496: maggiore resistenza ai guasti necessità di rilevare eventuali guasti é é controllo
Uso degli apparecchi elettrosensibili di protezione: cosa è necessario sapere... Parte 1 della normativa IEC / EN 61496: maggiore resistenza ai guasti necessità di rilevare eventuali guasti é é controllo
La corrente alternata
 La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
PERDITE NEI NUCLEI MAGNETICI
 PERDITE NEI NUCLEI MAGNETICI Nei nuclei magnetici delle macchine elettriche si hanno perdite di potenza attiva dovute a: 1) Isteresi magnetica 2) Correnti parassite PERDITE NEL FERRO Entrambi i fenomeni
PERDITE NEI NUCLEI MAGNETICI Nei nuclei magnetici delle macchine elettriche si hanno perdite di potenza attiva dovute a: 1) Isteresi magnetica 2) Correnti parassite PERDITE NEL FERRO Entrambi i fenomeni
Applicazioni di informatica. Sensori. Marco Tagliasacchi
 Sensori Marco Tagliasacchi Sensori Sensori 2 Un sensore è un dispositivo che misura una quantità fisica e la converte in un segnale che può essere letta da un osservatore o da uno strumento Sensori Grandezze
Sensori Marco Tagliasacchi Sensori Sensori 2 Un sensore è un dispositivo che misura una quantità fisica e la converte in un segnale che può essere letta da un osservatore o da uno strumento Sensori Grandezze
Sensori: Proprietà Generali
 Sensori: Proprietà Generali Trasduttore: Trasduttore / Transducer (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti a un sistema energetico
Sensori: Proprietà Generali Trasduttore: Trasduttore / Transducer (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti a un sistema energetico
Termografia a infrarossi
 Termografia a infrarossi Nella radiometria a microonde si verifica che hν
Termografia a infrarossi Nella radiometria a microonde si verifica che hν
METODI DI RAPPRESENTAZIONE DI UN SISTEMA
 METODI DI RAPPRESENTAZIONE DI UN SISTEMA PROPRIETA ELEMENTARI Proprietà elementari dei componenti idraulici Proprietà elementari dei componenti termici Proprietà elementari dei componenti meccanici Proprietà
METODI DI RAPPRESENTAZIONE DI UN SISTEMA PROPRIETA ELEMENTARI Proprietà elementari dei componenti idraulici Proprietà elementari dei componenti termici Proprietà elementari dei componenti meccanici Proprietà
CIRCUITO DI CONDIZIONAMENTO PER IL TRASDUTTORE DI TEMPERATURA AD590
 CIRCUITO DI CONDIZIONAMENTO PER IL ASDUTTORE DI TEMPERATURA AD590 Gruppo n 5 Urbini Andrea Marconi Simone Classe 5C 2001/2002 SPECIFICHE DEL PROGETTO: realizzare un circuito in grado di trasformare una
CIRCUITO DI CONDIZIONAMENTO PER IL ASDUTTORE DI TEMPERATURA AD590 Gruppo n 5 Urbini Andrea Marconi Simone Classe 5C 2001/2002 SPECIFICHE DEL PROGETTO: realizzare un circuito in grado di trasformare una
COMPONENTI PER L ELETTRONICA INDUSTRIALE E IL CONTROLLO DI PROCESSO
 COMPONENTI PER L ELETTRONICA INDUSTRIALE E IL CONTROLLO DI PROCESSO Trasmettitori e convertitori di temperatura e segnale per montaggio su guida DIN serie P.D.S. I trasmettitori e convertitori della serie
COMPONENTI PER L ELETTRONICA INDUSTRIALE E IL CONTROLLO DI PROCESSO Trasmettitori e convertitori di temperatura e segnale per montaggio su guida DIN serie P.D.S. I trasmettitori e convertitori della serie
Liceo Artistico R. Cottini Torino
 INSIEMI NUMERICI Liceo Artistico R. Cottini Torino Programma di 1 a per l IDONEITÀ ALLA CLASSE 2 A L insieme dei numeri naturali le quattro operazioni in N multipli e divisori potenze espressioni con i
INSIEMI NUMERICI Liceo Artistico R. Cottini Torino Programma di 1 a per l IDONEITÀ ALLA CLASSE 2 A L insieme dei numeri naturali le quattro operazioni in N multipli e divisori potenze espressioni con i
Introduzione all esperienza sul Tubo di Kundt
 03-05-2015 Introduzione all esperienza sul Tubo di Kundt Laboratorio di Fisica con Elementi di Statistica, Anno Accademico 2015-2016 Docente responsabile dell esperienza: Paolo Piseri date: Turno 1 Turno
03-05-2015 Introduzione all esperienza sul Tubo di Kundt Laboratorio di Fisica con Elementi di Statistica, Anno Accademico 2015-2016 Docente responsabile dell esperienza: Paolo Piseri date: Turno 1 Turno
Sensori Fisici.
 Sensori Fisici a.tognetti@centropiaggio.unipi.it Polarizzazione materiali Si chiama momento di dipolo elettrico una grandezza vettoriale p che ha direzione e verso dalla carica negativa a quella positiva
Sensori Fisici a.tognetti@centropiaggio.unipi.it Polarizzazione materiali Si chiama momento di dipolo elettrico una grandezza vettoriale p che ha direzione e verso dalla carica negativa a quella positiva
Robotica Mobile Percezione
 Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Determinazione del coefficiente di Joule-Thomson di un gas
 Chimica Fisica II Laboratorio A.A. 0-03 Anno Accademico 0 03 Corso di Laurea in Chimica Chimica Fisica II modulo B Esperienza di Laboratorio: Determinazione del coefficiente di Joule-Thomson di un gas
Chimica Fisica II Laboratorio A.A. 0-03 Anno Accademico 0 03 Corso di Laurea in Chimica Chimica Fisica II modulo B Esperienza di Laboratorio: Determinazione del coefficiente di Joule-Thomson di un gas
ESERCIZI - SERIE N. 4
 ESERCIZI - SERIE N. 4 EMISSIONE DI SEGNALI ANALOGICI Problema: convertire il risultato da formato binario, ottenuto dall'algoritmo di controllo ed elaborato dall'unità di governo realizzata con tecnologia
ESERCIZI - SERIE N. 4 EMISSIONE DI SEGNALI ANALOGICI Problema: convertire il risultato da formato binario, ottenuto dall'algoritmo di controllo ed elaborato dall'unità di governo realizzata con tecnologia
RELAZIONE COMPORTAMENTO MECCANICO DEI MATERIALI: MISURE ESTENSIMETRICHE
 UNIVERSITA DEGLI STUDI DI CAGLIARI DIPARTIMENTO DI INGEGNERIA MECCANICA RELAZIONE COMPORTAMENTO MECCANICO DEI MATERIALI: MISURE ESTENSIMETRICHE Relazione a cura di: Mattia Lai 45295 Andrea Aresu 45198
UNIVERSITA DEGLI STUDI DI CAGLIARI DIPARTIMENTO DI INGEGNERIA MECCANICA RELAZIONE COMPORTAMENTO MECCANICO DEI MATERIALI: MISURE ESTENSIMETRICHE Relazione a cura di: Mattia Lai 45295 Andrea Aresu 45198
IPSSAR P. ARTUSI - Forlimpopoli (Fc) 1 ANNO MODULO: ACCOGLIENZA
 1 ANNO MODULO: ACCOGLIENZA") MODULO: ACCOGLIENZA - Il programma di Fisica da svolgere assieme - Conoscere gli alunni - Il metodo di lavoro e di valutazione - Far conoscere agli alunni il metodo di lavoro - Esporre il metodo di valutazione
MODULO: ACCOGLIENZA - Il programma di Fisica da svolgere assieme - Conoscere gli alunni - Il metodo di lavoro e di valutazione - Far conoscere agli alunni il metodo di lavoro - Esporre il metodo di valutazione
Lezione 7. Requisiti di un sistema di controllo
 Lezione 7 Requisiti di un sistema di controllo Componenti di uno schema di controllo Esaurita la trattazione dei sistemi dinamici, si torna ora al problema di controllo, che aveva dato origine a tale studio.
Lezione 7 Requisiti di un sistema di controllo Componenti di uno schema di controllo Esaurita la trattazione dei sistemi dinamici, si torna ora al problema di controllo, che aveva dato origine a tale studio.
CANALE STAZIONARIO CANALE TEMPO INVARIANTE
 CANALE STAZIONARIO Si parla di un Canale Stazionario quando i fenomeni che avvengono possono essere modellati da processi casuali e le proprietà statistiche di tali processi sono indipendenti dal tempo.
CANALE STAZIONARIO Si parla di un Canale Stazionario quando i fenomeni che avvengono possono essere modellati da processi casuali e le proprietà statistiche di tali processi sono indipendenti dal tempo.
TEST DINAMICO MECCANICI
 Università degli Studi di Perugia Facoltà di Ingegneria - Industrialemisure@unipg.it Nuovo laboratorio di Foligno (Pg) dedicato ai TEST DINAMICO MECCANICI Tecniche sperimentali per migliorare le prestazioni
Università degli Studi di Perugia Facoltà di Ingegneria - Industrialemisure@unipg.it Nuovo laboratorio di Foligno (Pg) dedicato ai TEST DINAMICO MECCANICI Tecniche sperimentali per migliorare le prestazioni
Strumenti Indicatori Analogici Elettromeccanici
 Facoltà di Ingegneria Università degli Studi di Firenze Dipartimento di Elettronica e Telecomunicazioni Strumenti Indicatori Analogici Elettromeccanici Ing. Andrea Zanobini Dipartimento di Elettronica
Facoltà di Ingegneria Università degli Studi di Firenze Dipartimento di Elettronica e Telecomunicazioni Strumenti Indicatori Analogici Elettromeccanici Ing. Andrea Zanobini Dipartimento di Elettronica
Misure e Tecniche Sperimentali - Alfredo Cigada
 Misure di spostamento Estensometro F A 2 L t F VISTA A - A A estensimetri 1 Misure di spostamento 3 Misure di spostamento : lineare angolare Misure di spostamento : Quasi statiche (allineamento di un rotore
Misure di spostamento Estensometro F A 2 L t F VISTA A - A A estensimetri 1 Misure di spostamento 3 Misure di spostamento : lineare angolare Misure di spostamento : Quasi statiche (allineamento di un rotore
Fisica. Fisica. By Maria Libera Albanese. Release Date : Genre : Fisica FIle Size : 6.90 MB
 - Maria Libera Albanese By Maria Libera Albanese Release Date : 2012-01-01 Genre : FIle Size : 6.90 MB is Tutta la FISICA in un'app: la cinematica, le leggi di Keplero e i principi della dinamica. Lo studio
- Maria Libera Albanese By Maria Libera Albanese Release Date : 2012-01-01 Genre : FIle Size : 6.90 MB is Tutta la FISICA in un'app: la cinematica, le leggi di Keplero e i principi della dinamica. Lo studio
Risonanza magnetica nucleare
 Risonanza magnetica nucleare Università di Firenze Corso di Tecnologie Biomediche Lezione del 31 ottobre 2003 Leonardo Bocchi Principi fisici Premessa Modello classico Visualizzazione semplificata Equazione
Risonanza magnetica nucleare Università di Firenze Corso di Tecnologie Biomediche Lezione del 31 ottobre 2003 Leonardo Bocchi Principi fisici Premessa Modello classico Visualizzazione semplificata Equazione
Calcolo numerico per utilizzare i residui di udito
 Calcolo numerico per utilizzare i residui di udito Andrea Trucco, Ph.D. Dipartimento Ingegneria Biofisica ed Elettronica DIBE - Università di Genova trucco@ieee.org 1 Segnale audio Variazione della pressione
Calcolo numerico per utilizzare i residui di udito Andrea Trucco, Ph.D. Dipartimento Ingegneria Biofisica ed Elettronica DIBE - Università di Genova trucco@ieee.org 1 Segnale audio Variazione della pressione
Università del Salento Facoltà di Ingegneria Costruzione di Macchine
 Università del Salento Facoltà di Ingegneria Costruzione di Macchine Lezione 3 Prova di trazione a cura del prof. ing. Vito Dattoma e dell ing. Riccardo Nobile 1 Prove di caratterizzazione meccanica Prova
Università del Salento Facoltà di Ingegneria Costruzione di Macchine Lezione 3 Prova di trazione a cura del prof. ing. Vito Dattoma e dell ing. Riccardo Nobile 1 Prove di caratterizzazione meccanica Prova
Misure di spostamento
 Misure di spostamento Estensometro F A 2 L t F VISTA A - A A estensimetri 1 Misure di spostamento 3 Misure di spostamento : lineare angolare Misure di spostamento : Quasi statiche (allineamento di un rotore
Misure di spostamento Estensometro F A 2 L t F VISTA A - A A estensimetri 1 Misure di spostamento 3 Misure di spostamento : lineare angolare Misure di spostamento : Quasi statiche (allineamento di un rotore
Dipartimento di Scienze Chimiche. Ambiente. Sistema
 Descrizione macroscopica dei sistemi materiali Sistema: materia compresa entro una superficie chiusa (ad esempio la superficie interna di un contenitore, ma può essere anche una superficie matematica,
Descrizione macroscopica dei sistemi materiali Sistema: materia compresa entro una superficie chiusa (ad esempio la superficie interna di un contenitore, ma può essere anche una superficie matematica,
Soluzioni degli esercizi
 Soluzioni degli esercizi Compito 1. Formula risolutiva: t = V ρ g h / W con V = volume pozza, ρ = densità assoluta dell'acqua, h = altezza, W = potenza pompa Tempo = 0.1490E+03 s Formula risolutiva: c
Soluzioni degli esercizi Compito 1. Formula risolutiva: t = V ρ g h / W con V = volume pozza, ρ = densità assoluta dell'acqua, h = altezza, W = potenza pompa Tempo = 0.1490E+03 s Formula risolutiva: c
Esempi di tipi di sensori
 Componenti dei sistemi di controllo I componenti dei sistemi di controllo In un sistema di controllo sono presenti generalmente i seguenti componenti trasduttori; rivelatori di errore (nodi di confronto);
Componenti dei sistemi di controllo I componenti dei sistemi di controllo In un sistema di controllo sono presenti generalmente i seguenti componenti trasduttori; rivelatori di errore (nodi di confronto);
Conversione Analogico/Digitale
 Conversione Analogico/Digitale La conversione Analogico/Digitale (A/D) e quella Digitale/Analogico (D/A) forniscono il legame tra il mondo delle grandezze fisiche (analogiche) e quello del calcolo e della
Conversione Analogico/Digitale La conversione Analogico/Digitale (A/D) e quella Digitale/Analogico (D/A) forniscono il legame tra il mondo delle grandezze fisiche (analogiche) e quello del calcolo e della
Sistema 6000 Convertitore elettropneumatico per segnali in corrente continua Convertitore i/p Tipo 6126
 Sistema 6 Convertitore elettropneumatico per segnali in corrente continua Convertitore i/p Tipo 66 Applicazione Apparecchi per trasformare un segnale in corrente continua in un segnale pneumatico di misura
Sistema 6 Convertitore elettropneumatico per segnali in corrente continua Convertitore i/p Tipo 66 Applicazione Apparecchi per trasformare un segnale in corrente continua in un segnale pneumatico di misura
Ad uso didattico - Copia in lavorazione
 Indice Lezioni di Meccanica del Volo La Salita - Parte II Prof. Giuliano Deledda Istituto Tecnico Commerciale ed Aeronautico G. P. Chironi Nuoro A.S. 203/204 Sommario Queste note riportano lo studio dei
Indice Lezioni di Meccanica del Volo La Salita - Parte II Prof. Giuliano Deledda Istituto Tecnico Commerciale ed Aeronautico G. P. Chironi Nuoro A.S. 203/204 Sommario Queste note riportano lo studio dei