Corso di Analisi Numerica - AN1. Parte 3: metodi iterativi per sistemi lineari ed. equazioni nonlineari. Roberto Ferretti
|
|
|
- Timoteo Pellegrino
- 7 anni fa
- Visualizzazioni
Transcript

1 Corso di Analisi Numerica - AN1 Parte 3: metodi iterativi per sistemi lineari ed equazioni nonlineari Roberto Ferretti
2 Filosofia generale dei metodi iterativi Metodi iterativi per Sistemi Lineari Convergenza dei metodi iterativi per Sistemi Lineari Metodi per equazioni scalari: la bisezione Metodi per equazioni scalari: iterazioni di punto fisso Metodi per equazioni scalari: metodo di Newton e varianti 1
3 Filosofia generale dei metodi iterativi Sono metodi che non forniscono la soluzione esatta in un numero finito di operazioni, anche supponendo di lavorare in aritmetica esatta. Nei metodi iterativi, la soluzione viene cercata tramite una successione di soluzioni approssimate x k Nella maggioranza dei casi, tale successione si costruisce ponendo il sistema Ax = b o l equazione f(x) = 0 in forma di punto fisso: x = T (x) 2
4 Dal Teorema delle contrazioni é noto che se esiste un insieme invariante U per la trasformazione T ( ) e se T ( ) é una contrazione su U, allora preso x 0 U e definita la successione x k+1 = T (x k ) (1) si ha x k x, dove x é l unica soluzione in U dell equazione di punto fisso x = T (x). Questo permette di definire costruttivamente una successione convergente ad x, a patto di avere una contrazione a secondo membro di (1). 3
5 Poiché é generalmente piú facile localizzare approssimativamente una soluzione piuttosto che trovare un insieme invariante per la trasformazione T, puó essere conveniente sostituire l ipotesi di invarianza con l ipotesi che T sia una contrazione nell intorno della soluzione: infatti in questo caso se x k é in un intorno sferico di x ed L T é la costante di Lipschitz di T, allora x k+1 x = T (x k ) T ( x) L T x k x < x k x ed anche x k+1 é nello stesso intorno (che é quindi l insieme invariante cercato) 4
6 La costante di Lipschitz di una trasformazione T : R n R n puó essere determinata come L T = sup x dove J T (x) é la matrice jacobiana J T = T 1. x 1 T n x 1 J T (x) T 1 x n. T n x n Nel caso di trasformazioni affini, la jacobiana é costante Se n = 1, la norma della jacobiana equivale al modulo della derivata 5
7 L errore x k x puó essere maggiorato in due modi: Se é possibile maggiorare l errore iniziale x 0 x, allora x k x L T x k 1 x L k T x 0 x Altrimenti, dall aggiornamento x k x k 1 si ha la maggiorazione x k x x k+1 x k + x k+2 x k+1 + L T x k x k 1 + L 2 T x k x k 1 + L T 1 L T x k x k 1 Nel definire un corretto criterio di arresto delle iterazioni, si deve tenere conto anche dell entitá del residuo ( Ax b o f(x) ) 6
8 x k x piccolo, f(x) grande x k x grande, f(x) piccolo 7
9 La maggiorazione dell errore al passo k esimo in funzione di quello al passo (k 1) esimo, x k x L T x k 1 x in qualche caso puó essere migliorata: si definisce ordine di convergenza di un metodo il piú grande esponente γ tale che x k x C x k 1 x γ Nei metodi basati su una contrazione tipicamente C = L T e γ = 1, ma l interesse é verso metodi con γ > 1 (un ordine piú alto implica di regola un incremento della velocitá di convergenza del metodo) indice 8
10 Metodi iterativi per Sistemi Lineari La forma generale dei metodi iterativi per sistemi lineari si basa su una trasformazione T : R n R n affine: x k+1 = T (x k ) = Bx k + c Come é facile verificare, la matrice jacobiana della trasformazione é la matrice B (detta anche matrice di iterazione) In questo caso, puó essere data una condizione di convergenza necessaria e sufficiente, piú generale della condizione di contrattivitá B < 1 9
11 Un primo modo di costruire la trasformazione T é dato dal metodo di Jacobi in cui si esplicita la variabile i sima dalla equazione i sima: x 1 = 1 (b 1 a 12 x 2 a 13 x 3 a 1n x n ) a 11. (2) x n = 1 ( ) bn a n1 x 1 a n2 x 2 a n,n 1 x n 1 a nn Questo metodo suppone che gli elementi sulla diagonale di A siano non nulli, eventualmente a meno di permutazioni delle righe La convergenza puó dipendere dall ordinamento delle righe (o, in altre parole, dall ordine con cui si esplicitano le variabili) 10
12 Il metodo di Jacobi consiste quindi nella iterazione: x (k+1) i = 1 a ii b i a ij x (k) (i = 1,..., n) j i (in cui il numero di iterazione é stato indicato all apice, entro parentesi) j Il metodo richiede di memorizzare due vettori separati x (k) ed x (k+1) (infatti, il vettore non puó essere aggiornato fino a che non siano state calcolate tutte le componenti) 11
13 Una variante del metodo di Jacobi é il metodo di Gauss Seidel, in cui le variabili aggiornate vengono utilizzate immediatamente, ottenendo quindi la iterazione: x (k+1) i = 1 a ii b i j<i a ij x (k+1) j j>i a ij x (k) j (i = 1,..., n) (3) Il metodo di Gauss Seidel richiede quindi di memorizzare un solo vettore che sará riempito in parte dalla approssimazione x (k) ed in parte da x (k+1) 12
14 Una ulteriore variante del metodo di Gauss Seidel é il metodo del sovrarilassamento o SOR (Successive Over Relaxation), in cui viene introdotto un parametro ω detto parametro di rilassamento con l intento di accelerare la convergenza, ponendo lo schema nella forma: x (k+1) i = (1 ω)x (k) i in cui x (k+1) i,gs é il secondo membro di (3). + ωx (k+1) i,gs (i = 1,..., n) In genere per accelerare la convergenza si sceglie ω > 1, ma il valore ottimale é noto solo per alcune classi di matrici 13
15 Complessitá dei metodi iterativi: Il calcolo di T (x k ) richiede una somma ed un prodotto per ogni elemento non nullo di A. Il numero di operazioni é quindi O(2n 2 ) O(cost n) per matrici piene per matrici sparse e questo puó portare a preferire questi metodi in problemi sparsi La possibilitá di ottenere efficientemente una soluzione accurata dipende anche dalla costante di contrazione del metodo 14
16 Confronto tra metodi diretti e metodi iterativi: Nei problemi di piccole dimensioni i metodi diretti forniscono di regola soluzioni accurate con un numero ottimale di operazioni Nei problemi di grandi dimensioni i metodi diretti soffrono di instabilitá numeriche ed in generale non sono in grado di trarre vantaggio dalla eventuale sparsitá del problema La situazione piú favorevole all uso di metodi iterativi é quindi quella di problemi sparsi di grandi dimensioni 15
17 schema complessitá complessitá occupazione occupazione (probl. pieni) (probl. sparsi) (probl. pieni) (probl. sparsi) MEG O ( ) 2n 3 3 O ( ) 2n 3 3 O(n 2 ) O(n 2 ) LU O ( 2n 3 3 ), O(2n 2 ) (*) O ( ) 2n 3, O(2n 2 ) (*) O(n 2 ) O(n 2 ) 3 QR O ( 4n 3 3 ), O(3n 2 ) (*) O ( ) 4n 3, O(3n 2 ) (*) O(n 2 ) O(n 2 ) 3 iterat. O(n 2 ) per it. O(n) per it. O(n 2 ) O(n) (*) in caso di piú sistemi con la stessa matrice ma con termini noti diversi indice 16
18 Convergenza dei metodi iterativi per Sistemi Lineari La condizione necessaria e sufficiente di convergenza, per i metodi nella forma x k+1 = Bx k + c (4) é che ρ(b) < 1. In pratica questa condizione é difficile da verificare e se possibile si sostituisce con la condizione sufficiente B < 1 (che implica l altra, e coincide con la condizione di contrattivitá) 17

19 Per scrivere esplicitamente la matrice B nei vari casi, si partiziona la matrice A: e ij = d ij = f ij = a ij se i > j 0 altrimenti a ij se i = j 0 altrimenti a ij se i < j 0 altrimenti 18
20 Con questa partizione, il metodo di Jacobi puó essere riscritto come: Dx k+1 = (E + F )x k + b che coincide con la forma generale (4) ponendo B J = D 1 (E + F ) e c J = D 1 b. In questo caso si dimostra facilmente che la condizione B J < 1 equivale alla dominanza diagonale per righe di A, che é quindi una condizione sufficiente di convergenza Lo studio della convergenza nella norma 1 porta ad una condizione simile, ma di verifica meno immediata 19
21 A sua volta, il metodo di Gauss Seidel puó essere riscritto come: (D + E)x k+1 = F x k + b che si riporta alla forma generale (4) ponendo B GS = (D + E) 1 F e c GS = (D + E) 1 b. In modo piuttosto tecnico si dimostra che due condizioni sufficienti per la convergenza sono la dominanza diagonale e la positivitá di A In teoria, qualsiasi sistema si puó riportare a quest ultimo caso: Ax = b A t Ax = A t b (A t A > 0) 20
22 Infine, il metodo SOR puó essere riscritto come: a ii x k+1 i = a ii (1 ω)x k i + ωb i ω j<i a ij x (k+1) j ω j>i a ij x (k) j da cui si ottiene la forma (D + ωe)x k+1 = [(1 ω)d ωf ]x k + ωb la cui matrice di iterazione é B SOR = (D + ωe) 1 [(1 ω)d ωf ] e c SOR = (D + ωe) 1 b. Si dimostra che una condizione sufficiente di convergenza per il metodo SOR é che A > 0 ed 0 < ω < 2 indice 21
23 Metodi per equazioni scalari: la bisezione Il metodo di bisezione (che non é nella forma (1)) é talvolta usato per dimostrare il teorema di esistenza degli zeri. Si parte da un intervallo [a 0, b 0 ] in cui la funzione cambia di segno, e si costruisce una successione di intervalli [a k, b k ] in modo che b k a k = 1 2 (b k 1 a k 1 ) e che la funzione cambi di segno in [a k, b k ]. La radice é il limite delle successioni a k e b k L algoritmo converge sotto la sola ipotesi di continuitá di f 22
24 E dato l intervallo [a 0, b 0 ], k = Poni c k = a k+b k 2 2. Se f(c k ) = 0 o se é soddisfatta la condizione di arresto, STOP 3. Se f(a k )f(c k ) < 0, poni a k+1 = a k, b k+1 = c k, incrementa k e vai a 1 4. Se f(b k )f(c k ) < 0, poni a k+1 = c k, b k+1 = b k, incrementa k e vai a 1 23
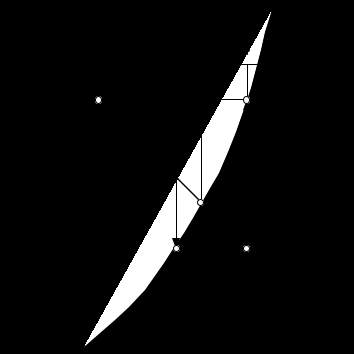
![Ogni intervallo [a k, b k ] per k 0 contiene la radice E possibile che si scartino intervalli contenenti radici, se](/docs-images/60/44665244/images/25-0.png "queste sono in numero pari Ad ogni passo, l errore (visto come ampiezza dell intervallo [a k, b k ]) si dimezza indice")
25 Ogni intervallo [a k, b k ] per k 0 contiene la radice E possibile che si scartino intervalli contenenti radici, se queste sono in numero pari Ad ogni passo, l errore (visto come ampiezza dell intervallo [a k, b k ]) si dimezza indice 24
26 Metodi per equazioni scalari: iterazioni di punto fisso In una dimensione, riscriviamo i metodi in forma (1) come x k+1 = g(x k ) (g : R R) (5) La condizione di contrattivitá diviene g (x) < 1 In una dimensione si puó dare una interpretazione grafica della costruzione ed eventuale convergenza della successione x k, basandosi sul fatto che la soluzione é intersezione dei grafici y = x y = g(x) 25




27 0 < g (x) < 1 1 < g (x) < 0 26
 < 1")

28 1 < g (x) g (x) < 1 27
29 Un modo standard per porre una equazione scalare f(x) = 0 in forma di punto fisso é di riscriverla come x = x + α(x)f(x) (6) Perché questa forma sia equivalente all equazione originale, la funzione (eventualmente costante) α(x) non deve avere zeri nell intorno di x. Utilizzando (6) per definire un metodo iterativo, si richiede normalmente che x sia una radice semplice (infatti se x é una radice multipla, si ha g ( x) = 1 e quindi g non é una contrazione) 28
30 L ordine di convergenza di un metodo nella forma (5) si puó caratterizzare nel modo seguente: Se g C m+1 e g ( x) = = g (m) ( x) = 0, g (m+1) ( x) 0, allora il metodo converge con ordine m + 1 se x 0 é sufficientemente vicino a x In particolare, se g(x) é nella forma (6) con α(x) = α (costante) allora se α = 1/f ( x) si ha convergenza quadratica (in generale, con questa struttura del metodo non si puó avere un ordine di convergenza superiore a 2) 29
31 Poiché x non é noto (ed anche la espressione esplicita di f puó non essere nota), la costante α deve essere una approssimazione del valore ottimale 1/f ( x) Una possibilitá é quella di sostituire f ( x) con il rapporto incrementale di f calcolato su un intorno (sufficientemente piccolo) [a, b] di x: in questo modo si ha il cosiddetto metodo delle corde: x k+1 = x k b a f(b) f(a) f(x k) convergente se f C 1, f ( x) 0 e a, b, x 0 sono abbastanza vicini a x indice 30
32 Metodi per equazioni scalari: varianti metodo di Newton e Il metodo di Newton si ottiene utilizzando la forma (6) con α(x) = 1/f (x) Si suppone quindi di conoscere l espressione esplicita della derivata Poiché, se f C 2 e f ( x) 0, si ha g ( x) = 1 f ( x) 2 f( x)f ( x) f ( x) 2 = 0 il metodo converge con ordine quadratico se x 0 é abbastanza vicino a x 31

33 L approssimazione x k+1 é lo zero della tangente al grafico di f in (x k, f(x k )) Va evitato che la derivata si annulli nell intorno di x (in questo caso la tangente diventerebbe parallela all asse delle ascisse) 32
34 Si puó dimostrare convergenza monotona, globale dello schema in uno dei seguenti casi: x 0 > x, f(x) crescente convessa f(x) decrescente concava x 0 < x, f(x) crescente concava f(x) decrescente convessa In caso di radici di molteplicitá m > 1, il metodo non é piú quadratico, ma converge invece con ordine quadratico il metodo x k+1 = x k m f(x k) f (x k ) 33
35 Un metodo di Newton approssimato si puó ottenere sostituendo il calcolo di con f (x) con quello del rapporto incrementale di passo h nel punto x k, ottenendo lo schema: x k+1 = x k h f(x k + h) f(x k ) f(x k) Non é richiesta l espressione esplicita della derivata, ma si calcola f due volte per iterazione (in x k ed in x k + h). Per evitare perdita di cifre significative, h non va scelto troppo piccolo In generale g ( x) 0 e quindi si ha convergenza lineare, ma il coefficiente di contrazione puó essere abbastanza vicino a zero 34
36 Nel metodo delle secanti si sostituisce il calcolo di con f (x) con quello del rapporto incrementale tra i punti x k 1 e x k, ottenendo quindi lo schema (che non é nella forma (6)): x k+1 = x k x k x k 1 f(x k ) f(x k 1 ) f(x k) Non é richiesta l espressione esplicita della derivata, ed inoltre si calcola f una sola volta per iterazione Se f C 2 e f ( x) 0, la convergenza é sopralineare, con esponente γ = se x 0 ed x 1 sono abbastanza vicini a x
37 L approssimazione x k+1 é lo zero della retta passante per i punti (x k, f(x k )) e (x k 1, f(x k 1 )) Come negli altri casi, si richiede che x sia una radice semplice Si hanno risultati di convergenza monotona analoghi a quelli del metodo di Newton 36
38 Nel metodo di Newton cubico si estende l idea del metodo di Newton definendo x k+1 come uno zero del polinomio di Taylor di secondo ordine di f calcolato in x k : x k+1 = x k f (x k ) ± f (x k ) 2 2f(x k )f (x k ) f. (x k ) La ambiguitá di segno si risolve scegliendo la radice piú vicina ad x k Il metodo converge con ordine 3 se f C 3 e x 0 é abbastanza vicino a x Il metodo puó convergere a radici complesse (situazione utile nel caso di equazioni algebriche) 37
39 Nel metodo di Muller si utilizza l idea del metodo di Newton cubico, ma si definisce x k+1 come lo zero del polinomio (detto interpolatore) di secondo grado di f passante per i punti (x k, f(x k )), (x k 1, f(x k 1 )) e (x k 2, f(x k 2 )) Anche in questo caso, tra due radici reali si sceglie la radice piú vicina ad x k, e si puó convergere a radici complesse Il metodo converge con ordine γ 1.84 se f C 3 e x 0, x 1 e x 2 sono abbastanza vicini a x 38
40 Confronto tra i vari metodi iterativi: Per applicare i metodi di Newton occorre conoscere l espressione analitica della funzione Quando l espressione di f non é nota, i metodi piú efficienti sono quelli delle secanti e di Muller, a patto che la funzione f sia sufficientemente regolare In mancanza di regolaritá della f, l unico metodo utilizzabile sotto la sola ipotesi di continuitá é la bisezione 39
41 schema complessitá ordine regolaritá bisezione calcolo f(x) γ = 1 C 0 corde calcolo f(x) γ = 1 C 1 secanti calcolo f(x) γ 1.62 C 2 Muller calcolo f(x) γ 1.84 C 3 Newton calcolo f(x), f (x) γ = 2 C 2 Newton cubico calcolo f(x), f (x), f (x) γ = 3 C 3 40
Derivazione numerica. Introduzione al calcolo numerico. Derivazione numerica (II) Derivazione numerica (III)
 Derivazione numerica (III)") Derivazione numerica Introduzione al calcolo numerico Il calcolo della derivata di una funzione in un punto implica un processo al limite che può solo essere approssimato da un calcolatore. Supponiamo
Derivazione numerica Introduzione al calcolo numerico Il calcolo della derivata di una funzione in un punto implica un processo al limite che può solo essere approssimato da un calcolatore. Supponiamo
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame
 Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Appunti del corso di Analisi Numerica
 Appunti del corso di Analisi Numerica Roberto Ferretti 21 marzo 2016 UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTÀ DI SCIENZE M.F.N. INDICE 2 Indice 1 Sistemi di equazioni lineari e nonlineari 5 1.1 I metodi
Appunti del corso di Analisi Numerica Roberto Ferretti 21 marzo 2016 UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTÀ DI SCIENZE M.F.N. INDICE 2 Indice 1 Sistemi di equazioni lineari e nonlineari 5 1.1 I metodi
Esercizio 1. Esercizio 2
 Sia data la matrice A A(α) = Esercizio α 2 2α 2 2, α R.) determinare per quali valori del parametro reale α é verificata la condizione necessaria e sufficiente di convergenza per il metodo di Jacobi;.2)
Sia data la matrice A A(α) = Esercizio α 2 2α 2 2, α R.) determinare per quali valori del parametro reale α é verificata la condizione necessaria e sufficiente di convergenza per il metodo di Jacobi;.2)
Equazioni non lineari
 Equazioni non lineari Introduzione In molte applicazioni intervengono equazioni che non siamo in grado di risolvere analiticamente, o la cui risoluzione risulta molto complessa e laboriosa. Un importante
Equazioni non lineari Introduzione In molte applicazioni intervengono equazioni che non siamo in grado di risolvere analiticamente, o la cui risoluzione risulta molto complessa e laboriosa. Un importante
Equazioni, funzioni e algoritmi: il metodo delle secanti
 Equazioni, funzioni e algoritmi: il metodo delle secanti Christian Ferrari 1 Introduzione La risoluzione di equazioni in R ci ha mostrato che solo per le equazioni polinomiali di primo e secondo grado,
Equazioni, funzioni e algoritmi: il metodo delle secanti Christian Ferrari 1 Introduzione La risoluzione di equazioni in R ci ha mostrato che solo per le equazioni polinomiali di primo e secondo grado,
Prova di ammissione al Dottorato di Ricerca in Matematica XXVIII ciclo. Universitá del Salento, 9 Aprile 2013
 Prova di ammissione al Dottorato di Ricerca in Matematica XXVIII ciclo Universitá del Salento, 9 Aprile 2013 1 1 TEMA I Il candidato svolga una ed una sola delle dissertazioni proposte, illustrando sinteticamente
Prova di ammissione al Dottorato di Ricerca in Matematica XXVIII ciclo Universitá del Salento, 9 Aprile 2013 1 1 TEMA I Il candidato svolga una ed una sola delle dissertazioni proposte, illustrando sinteticamente
Daniela Lera A.A. 2008-2009
 Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2008-2009 Equazioni non lineari Metodo di Newton Il metodo di Newton sfrutta le informazioni sulla funzione
Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2008-2009 Equazioni non lineari Metodo di Newton Il metodo di Newton sfrutta le informazioni sulla funzione
Universita degli Studi di Ancona - Facolta di Ingegneria Laurea in Ing. Elettronica (VO) Ing. Informatica e Automatica - Ing. delle Telecomunicazioni
 Ing. Informatica e Automatica - Ing. delle Telecomunicazioni") Universita degli Studi di Ancona - Facolta di Ingegneria Laurea in Ing. Elettronica (VO) Ing. Informatica e Automatica - Ing. delle Telecomunicazioni ANALISI NUMERICA - Primo Parziale - TEMA A (Prof. A.M.Perdon)
Universita degli Studi di Ancona - Facolta di Ingegneria Laurea in Ing. Elettronica (VO) Ing. Informatica e Automatica - Ing. delle Telecomunicazioni ANALISI NUMERICA - Primo Parziale - TEMA A (Prof. A.M.Perdon)
Facoltá di Scienze MM.FF.NN. Corso di Studi in Informatica- A.A
 Facoltá di Scienze MM.FF.NN. Corso di Studi in Informatica- A.A. 5-6 Corso di CALCOLO NUMERICO / ANALISI NUMERICA : Esempi di esercizi svolti in aula 5//5 ) Dato un triangolo, siano a, b le lunghezze di
Facoltá di Scienze MM.FF.NN. Corso di Studi in Informatica- A.A. 5-6 Corso di CALCOLO NUMERICO / ANALISI NUMERICA : Esempi di esercizi svolti in aula 5//5 ) Dato un triangolo, siano a, b le lunghezze di
EQUAZIONI non LINEARI
 EQUAZIONI non LINEARI Francesca Pelosi Dipartimento di Matematica, Università di Roma Tor Vergata CALCOLO NUMERICO e PROGRAMMAZIONE http://www.mat.uniroma2.it/ pelosi/ EQUAZIONI non LINEARI p.1/44 EQUAZIONI
EQUAZIONI non LINEARI Francesca Pelosi Dipartimento di Matematica, Università di Roma Tor Vergata CALCOLO NUMERICO e PROGRAMMAZIONE http://www.mat.uniroma2.it/ pelosi/ EQUAZIONI non LINEARI p.1/44 EQUAZIONI
RICHIAMI PER IL CORSO DI ANALISI NUMERICA
 RICHIAMI PER IL CORSO DI ANALISI NUMERICA Anno accademico 211 212 1 RICHIAMI: PRECISIONE FINITA (USO DI UN COMPUTER) IN UN COMPUTER UNA QUALUNQUE INFORMAZIONE VIENE RAPPRESENTATA COME UNA SEQUENZA FINITA
RICHIAMI PER IL CORSO DI ANALISI NUMERICA Anno accademico 211 212 1 RICHIAMI: PRECISIONE FINITA (USO DI UN COMPUTER) IN UN COMPUTER UNA QUALUNQUE INFORMAZIONE VIENE RAPPRESENTATA COME UNA SEQUENZA FINITA
1) Applicando la definizione di derivata, calcolare la derivata in x = 0 delle funzioni: c) x + 1 d)x sin x.
 Applicando la definizione di derivata, calcolare la derivata in x = 0 delle funzioni: c) x + 1 d)x sin x.") Funzioni derivabili Esercizi svolti 1) Applicando la definizione di derivata, calcolare la derivata in x = 0 delle funzioni: a)2x 5 b) x 3 x 4 c) x + 1 d)x sin x. 2) Scrivere l equazione della retta tangente
Funzioni derivabili Esercizi svolti 1) Applicando la definizione di derivata, calcolare la derivata in x = 0 delle funzioni: a)2x 5 b) x 3 x 4 c) x + 1 d)x sin x. 2) Scrivere l equazione della retta tangente
Esercitazione 6: Metodi iterativi per sistemi lineari.
 Esercitazione 6: Metodi iterativi per sistemi lineari. Richiami di Teoria Iterazione di Jacobi e Gauss Seidel. I metodi iterativi sono basati sul calcolo della soluzione x del sistema lineare Ax = b come
Esercitazione 6: Metodi iterativi per sistemi lineari. Richiami di Teoria Iterazione di Jacobi e Gauss Seidel. I metodi iterativi sono basati sul calcolo della soluzione x del sistema lineare Ax = b come
Università Politecnica delle Marche - Facoltà di Ingegneria Ing. Informatica e Automatica - Ing. Logistica e Produzione
 ANALISI NUMERICA - Primo Parziale - TEMA A PARTE I. Si chiede allo studente di trattare i seguenti argomenti nel modo più completo possibile. 1. Propagazione degli errori nel caso di operazioni elementari
ANALISI NUMERICA - Primo Parziale - TEMA A PARTE I. Si chiede allo studente di trattare i seguenti argomenti nel modo più completo possibile. 1. Propagazione degli errori nel caso di operazioni elementari
Tipologia delle funzioni studiate: 1. y= ax n + bx n y= e x 3. y= (ax + b)/ (cx + d) 4. y= (ax 2 + b) (cx + d)
/ (cx + d) 4. y= (ax 2 + b) (cx + d)") - ricerca dei punti di flesso - ricerca dell asintoto orizzontale - ricerca dell asintoto verticale - ricerca dell asintoto obliquo - ricerca dei punti di intersezione con gli assi Tipologia delle funzioni
- ricerca dei punti di flesso - ricerca dell asintoto orizzontale - ricerca dell asintoto verticale - ricerca dell asintoto obliquo - ricerca dei punti di intersezione con gli assi Tipologia delle funzioni
Autovalori ed autovettori di una matrice
 Autovalori ed autovettori di una matrice Lucia Gastaldi DICATAM http://www.ing.unibs.it/gastaldi/ Indice 1 Definizioni di autovalori ed autovettori Autovalori ed autovettori 2 Metodo delle potenze 3 Calcolo
Autovalori ed autovettori di una matrice Lucia Gastaldi DICATAM http://www.ing.unibs.it/gastaldi/ Indice 1 Definizioni di autovalori ed autovettori Autovalori ed autovettori 2 Metodo delle potenze 3 Calcolo
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dott.ssa M.C. De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Risoluzione di Equazioni Algebriche Le equazioni
Corso di Calcolo Numerico Dott.ssa M.C. De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Risoluzione di Equazioni Algebriche Le equazioni
Osservazione. Convergenza dei metodi di Gauss-Seidel e di Jacobi. Condizioni sufficienti per la convergenza. Definizione
 Osservazione Convergenza dei metodi di Gauss-Seidel e di Jacobi Fallimento dei metodi. (Es. Gauss- Seidel Condizioni sufficienti; teoremi di localizzazione degli autovalori; dimostrazione di convergenza
Osservazione Convergenza dei metodi di Gauss-Seidel e di Jacobi Fallimento dei metodi. (Es. Gauss- Seidel Condizioni sufficienti; teoremi di localizzazione degli autovalori; dimostrazione di convergenza
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta
 - a.a. 2013/14 A. Teta") Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta 1. (1/10 Lu.) Generalità sugli insiemi, operazioni di unione, intersezione e prodotto cartesiano. Insiemi numerici: naturali,
Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta 1. (1/10 Lu.) Generalità sugli insiemi, operazioni di unione, intersezione e prodotto cartesiano. Insiemi numerici: naturali,
Teorema di Thevenin generalizzato
 Teorema di Thevenin generalizzato Si considerino due reti elettriche lineari, A e B, aventi rispettivamente N A e N B nodi interni. Esse si interfacciano attraverso n (n 3) fili di collegamento, in cui
Teorema di Thevenin generalizzato Si considerino due reti elettriche lineari, A e B, aventi rispettivamente N A e N B nodi interni. Esse si interfacciano attraverso n (n 3) fili di collegamento, in cui
Un monomio è in forma normale se è il prodotto di un solo fattore numerico e di fattori letterali con basi diverse. Tutto quanto sarà detto di
 DEFINIZIONE Espressione algebrica costituita dal prodotto tra una parte numerica (coefficiente) e una o più variabili e/o costanti (parte letterale). Variabili e costanti possono comparire elevate a potenza
DEFINIZIONE Espressione algebrica costituita dal prodotto tra una parte numerica (coefficiente) e una o più variabili e/o costanti (parte letterale). Variabili e costanti possono comparire elevate a potenza
NOTE SULLE FUNZIONI CONVESSE DI UNA VARIABILE REALE
 NOTE SULLE FUNZIONI CONVESSE DI UNA VARIABILE REALE ROBERTO GIAMBÒ 1. DEFINIZIONI E PRIME PROPRIETÀ In queste note saranno presentate alcune proprietà principali delle funzioni convesse di una variabile
NOTE SULLE FUNZIONI CONVESSE DI UNA VARIABILE REALE ROBERTO GIAMBÒ 1. DEFINIZIONI E PRIME PROPRIETÀ In queste note saranno presentate alcune proprietà principali delle funzioni convesse di una variabile
Equazioni non lineari
 Capitolo 2 Equazioni non lineari 2.1 Richiami di teoria Prerequisiti: teorema di Gauss, nozioni elementari di calcolo differenziale. In generale, per risolvere una equazione della forma f(x) = 0 dove f
Capitolo 2 Equazioni non lineari 2.1 Richiami di teoria Prerequisiti: teorema di Gauss, nozioni elementari di calcolo differenziale. In generale, per risolvere una equazione della forma f(x) = 0 dove f
Esercitazioni di Geometria A: curve algebriche
 Esercitazioni di Geometria A: curve algebriche 24-25 maggio 2016 Esercizio 1 Sia P 2 il piano proiettivo complesso munito delle coordinate proiettive (x 0 : x 1 : x 2 ). Sia r la retta proiettiva di equazione
Esercitazioni di Geometria A: curve algebriche 24-25 maggio 2016 Esercizio 1 Sia P 2 il piano proiettivo complesso munito delle coordinate proiettive (x 0 : x 1 : x 2 ). Sia r la retta proiettiva di equazione
Esercizi 3. cos x ln(sin x), ln(e x 1 x ), ln( x 2 1), x sin x + x cos x + x, x 3 2x + 1. x 2 x + 2, x cos ex, x 2 e x.
, ln(e x 1 x ), ln( x 2 1), x sin x + x cos x + x, x 3 2x + 1. x 2 x + 2, x cos ex, x 2 e x.") I seguenti quesiti ed il relativo svolgimento sono coperti dal diritto d autore, pertanto essi non possono essere sfruttati a fini commerciali o di pubblicazione editoriale senza autorizzazione esplicita
I seguenti quesiti ed il relativo svolgimento sono coperti dal diritto d autore, pertanto essi non possono essere sfruttati a fini commerciali o di pubblicazione editoriale senza autorizzazione esplicita
PROGRAMMA. Capitolo 1 : Concetti di base: numeri reali, funzioni, funzioni reali di variabile reale.
 PROGRAMMA Capitolo 1 : Concetti di base: numeri reali, funzioni, funzioni reali di variabile reale. Gli insiemi numerici oggetto del corso: numeri naturali, interi relativi, razionali. Operazioni sui numeri
PROGRAMMA Capitolo 1 : Concetti di base: numeri reali, funzioni, funzioni reali di variabile reale. Gli insiemi numerici oggetto del corso: numeri naturali, interi relativi, razionali. Operazioni sui numeri
ANALISI 1 - Teoremi e dimostrazioni vari
 ANALISI 1 - Teoremi e dimostrazioni vari Sommario Proprietà dell estremo superiore per R... 2 Definitivamente... 2 Successioni convergenti... 2 Successioni monotone... 2 Teorema di esistenza del limite
ANALISI 1 - Teoremi e dimostrazioni vari Sommario Proprietà dell estremo superiore per R... 2 Definitivamente... 2 Successioni convergenti... 2 Successioni monotone... 2 Teorema di esistenza del limite
SISTEMI LINEARI, METODO DI GAUSS
 SISTEMI LINEARI, METODO DI GAUSS Abbiamo visto che un sistema di m equazioni lineari in n incognite si può rappresentare in forma matriciale come A x = b dove: A è la matrice di tipo (m, n) dei coefficienti
SISTEMI LINEARI, METODO DI GAUSS Abbiamo visto che un sistema di m equazioni lineari in n incognite si può rappresentare in forma matriciale come A x = b dove: A è la matrice di tipo (m, n) dei coefficienti
Esercizi di Complementi di Matematica (L-Z) a.a. 2015/2016
 a.a. 2015/2016") Esercizi di Complementi di Matematica (L-Z) a.a. 2015/2016 Prodotti scalari e forme bilineari simmetriche (1) Sia F : R 2 R 2 R un applicazione definita da F (x, y) = x 1 y 1 + 3x 1 y 2 5x 2 y 1 + 2x 2
Esercizi di Complementi di Matematica (L-Z) a.a. 2015/2016 Prodotti scalari e forme bilineari simmetriche (1) Sia F : R 2 R 2 R un applicazione definita da F (x, y) = x 1 y 1 + 3x 1 y 2 5x 2 y 1 + 2x 2
Prima prova in itinere di Analisi Matematica 1 Ingegneria Elettronica. Politecnico di Milano. A.A. 2015/2016. Prof. M. Bramanti.
 Prima prova in itinere di Analisi Matematica Ingegneria Elettronica. Politecnico di Milano Es. Punti A.A. 0/06. Prof. M. Bramanti Tema n 4 6 Tot. Cognome e nome (in stampatello) codice persona (o n di
Prima prova in itinere di Analisi Matematica Ingegneria Elettronica. Politecnico di Milano Es. Punti A.A. 0/06. Prof. M. Bramanti Tema n 4 6 Tot. Cognome e nome (in stampatello) codice persona (o n di
Corso di Robotica 1 Cinematica inversa
 Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
ANALISI MATEMATICA A CORSO DI LAUREA TRIENNALE IN MATEMATICA 15 CF A.A
 ANALISI MATEMATICA A CORSO DI LAUREA TRIENNALE IN MATEMATICA 15 CF A.A. 2016-17 Programma Provvisorio del corso di Analisi Matematica A Il programma che segue è solo indicativo. Il programma definitivo
ANALISI MATEMATICA A CORSO DI LAUREA TRIENNALE IN MATEMATICA 15 CF A.A. 2016-17 Programma Provvisorio del corso di Analisi Matematica A Il programma che segue è solo indicativo. Il programma definitivo
La soluzione approssimata consiste nella soluzione di un problema pi u facile che approssima quello dato. Nella tecnica di rilassamento l'approssimazi
 Tecniche di soluzione di sistemi di equazioni non-lineari Le tecniche di rilassamento riguardano principalmente la soluzione per via numerica di sistemi di equazioni. Risultano particolarmente semplici
Tecniche di soluzione di sistemi di equazioni non-lineari Le tecniche di rilassamento riguardano principalmente la soluzione per via numerica di sistemi di equazioni. Risultano particolarmente semplici
Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I)
") Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I) Luigi De Giovanni Giacomo Zambelli 1 Problemi di programmazione lineare Un problema
Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I) Luigi De Giovanni Giacomo Zambelli 1 Problemi di programmazione lineare Un problema
= y h. m x0 (h) = y Q y P x Q x P. f(x 0 + h) f(x 0 )
 = y Q y P x Q x P. f(x 0 + h) f(x 0 )") ESERCIZI DI MATEMATICA: SCHEDA n.1 su derivate: la definzione Classe 5B Sc.Soc. Data:...... Teoria in sintesi. Data una funzione y = f(x) denita intorno ad x 0 (ovverosia il dominio contiene un intervallo
ESERCIZI DI MATEMATICA: SCHEDA n.1 su derivate: la definzione Classe 5B Sc.Soc. Data:...... Teoria in sintesi. Data una funzione y = f(x) denita intorno ad x 0 (ovverosia il dominio contiene un intervallo
Istituto Kandinsky Anno Scolastico Programma di MATEMATICA - Classi Prime
 Istituto Kandinsky Anno Scolastico 2011-2012 Programma di MATEMATICA - Classi Prime Insieme dei numeri naturali. Le operazioni in N: addizione, sottrazione, moltiplicazione e divisione. Legge di composizione
Istituto Kandinsky Anno Scolastico 2011-2012 Programma di MATEMATICA - Classi Prime Insieme dei numeri naturali. Le operazioni in N: addizione, sottrazione, moltiplicazione e divisione. Legge di composizione
valore di a: verso l alto (ordinate crescenti) se a>0, verso il basso (ordinate decrescenti) se a<0;
 se a>0, verso il basso (ordinate decrescenti) se a<0;") La parabola è una particolare conica definita come è una curva aperta, nel senso che non può essere contenuta in alcuna superficie finita del piano; è simmetrica rispetto ad una retta, detta ASSE della
La parabola è una particolare conica definita come è una curva aperta, nel senso che non può essere contenuta in alcuna superficie finita del piano; è simmetrica rispetto ad una retta, detta ASSE della
Equazioni non lineari
 Equazioni non lineari Data una funzione f : [a, b] R si cerca α [a, b] tale che f (α) = 0. I metodi numerici per la risoluzione di questo problema sono metodi iterativi. Teorema Data una funzione continua
Equazioni non lineari Data una funzione f : [a, b] R si cerca α [a, b] tale che f (α) = 0. I metodi numerici per la risoluzione di questo problema sono metodi iterativi. Teorema Data una funzione continua
Funzioni implicite - Esercizi svolti
 Funzioni implicite - Esercizi svolti Esercizio. È data la funzione di due variabili F (x, y) = y(e y + x) log x. Verificare che esiste un intorno I in R del punto di ascissa x 0 = sul quale è definita
Funzioni implicite - Esercizi svolti Esercizio. È data la funzione di due variabili F (x, y) = y(e y + x) log x. Verificare che esiste un intorno I in R del punto di ascissa x 0 = sul quale è definita
Regola dei trapezi. a, b punti fissi a priori. non fissi a priori (indeterminati) errore di integrazione. a, b
 errore di integrazione. a, b") INTEGRAZIONE NUMERICA (Quadratura di Gauss) Regola dei trapezi I ( b a) f ( a) + f ( b) f (x) errore di integrazione f (x) f (a) f (b) a b x a a ' b' b x a, b punti fissi a priori a, b non fissi a priori
INTEGRAZIONE NUMERICA (Quadratura di Gauss) Regola dei trapezi I ( b a) f ( a) + f ( b) f (x) errore di integrazione f (x) f (a) f (b) a b x a a ' b' b x a, b punti fissi a priori a, b non fissi a priori
C I R C O N F E R E N Z A...
 C I R C O N F E R E N Z A... ESERCITAZIONI SVOLTE 3 Equazione della circonferenza di noto centro C e raggio r... 3 Equazione della circonferenza di centro C passante per un punto A... 3 Equazione della
C I R C O N F E R E N Z A... ESERCITAZIONI SVOLTE 3 Equazione della circonferenza di noto centro C e raggio r... 3 Equazione della circonferenza di centro C passante per un punto A... 3 Equazione della
Zeri di funzioni e teorema di Sturm
 Zeri di funzioni e teorema di Sturm Enrico Bertolazzi Dipartimento di Ingegneria Meccanica e Strutturale Università degli Studi di Trento via Mesiano 77, I 38050 Trento, Italia EnricoBertolazzi@ingunitnit
Zeri di funzioni e teorema di Sturm Enrico Bertolazzi Dipartimento di Ingegneria Meccanica e Strutturale Università degli Studi di Trento via Mesiano 77, I 38050 Trento, Italia EnricoBertolazzi@ingunitnit
1 Ampliamento del piano e coordinate omogenee
 1 Ampliamento del piano e coordinate omogenee Vogliamo dare una idea, senza molte pretese, dei concetti che stanno alla base di alcuni calcoli svolti nella classificazione delle coniche. Supponiamo di
1 Ampliamento del piano e coordinate omogenee Vogliamo dare una idea, senza molte pretese, dei concetti che stanno alla base di alcuni calcoli svolti nella classificazione delle coniche. Supponiamo di
Equazioni Polinomiali II Parabola
 Equazioni Polinomiali II Parabola - 0 Equazioni Polinomiali del secondo grado (Polinomi II) Forma Canonica e considerazioni La forma canonica dell equazione polinomiale di grado secondo è la seguente:
Equazioni Polinomiali II Parabola - 0 Equazioni Polinomiali del secondo grado (Polinomi II) Forma Canonica e considerazioni La forma canonica dell equazione polinomiale di grado secondo è la seguente:
Funzioni elementari: funzioni potenza
 Funzioni elementari: funzioni potenza Lezione per Studenti di Agraria Università di Bologna (Università di Bologna) Funzioni elementari: funzioni potenza 1 / 36 Funzioni lineari Come abbiamo già visto,
Funzioni elementari: funzioni potenza Lezione per Studenti di Agraria Università di Bologna (Università di Bologna) Funzioni elementari: funzioni potenza 1 / 36 Funzioni lineari Come abbiamo già visto,
Corso di Analisi Numerica - AN1. Parte 4: approssimazione polinomiale. Roberto Ferretti
 Corso di Analisi Numerica - AN1 Parte 4: approssimazione polinomiale Roberto Ferretti Le principali strategie di approssimazione Il polinomio interpolatore: forme di Lagrange e Newton L errore di interpolazione
Corso di Analisi Numerica - AN1 Parte 4: approssimazione polinomiale Roberto Ferretti Le principali strategie di approssimazione Il polinomio interpolatore: forme di Lagrange e Newton L errore di interpolazione
SIMULAZIONE - 29 APRILE QUESITI
 www.matefilia.it SIMULAZIONE - 29 APRILE 206 - QUESITI Q Determinare il volume del solido generato dalla rotazione attorno alla retta di equazione y= della regione di piano delimitata dalla curva di equazione
www.matefilia.it SIMULAZIONE - 29 APRILE 206 - QUESITI Q Determinare il volume del solido generato dalla rotazione attorno alla retta di equazione y= della regione di piano delimitata dalla curva di equazione
Corso di Laurea in Ingegneria Gestionale Anno Accademico 2013/2014 Calcolo Numerico
 1. Dato il problema ai valori iniziali f (t) = f(t) + cos t f(0) = 1, (ii) determinarne la soluzione numerica per 0 t 2π utilizzando il metodo di 2. Calcolare analiticamente e numericamente la media della
1. Dato il problema ai valori iniziali f (t) = f(t) + cos t f(0) = 1, (ii) determinarne la soluzione numerica per 0 t 2π utilizzando il metodo di 2. Calcolare analiticamente e numericamente la media della
Diario del Corso Analisi Matematica I
 Diario del Corso Analisi Matematica I 1. Martedì 1 ottobre 2013 Presentazione del corso. Nozioni di Teoria degli Insiemi. Numeri Naturali, loro proprietà, rappresentazione geometrica, sommatoria, principio
Diario del Corso Analisi Matematica I 1. Martedì 1 ottobre 2013 Presentazione del corso. Nozioni di Teoria degli Insiemi. Numeri Naturali, loro proprietà, rappresentazione geometrica, sommatoria, principio
Per il progetto di una piscina, un architetto si ispira alle funzioni f e g definite, per tutti gli x reali, da:
 PROBLEMA 2 PNI Per il progetto di una piscina, un architetto si ispira alle funzioni f e g definite, per tutti gli x reali, da: 1. Si studino le funzioni f e g e se ne disegnino i rispettivi grafici in
PROBLEMA 2 PNI Per il progetto di una piscina, un architetto si ispira alle funzioni f e g definite, per tutti gli x reali, da: 1. Si studino le funzioni f e g e se ne disegnino i rispettivi grafici in
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche
 Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Coniche
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Coniche
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Informatica B
 2013-2014 Matlab Laboratorio del 14/01/2014 Responsabili di laboratorio: Gianluca Durelli: durelli@elet.polimi.it Luigi Malago : malago@di.unimi.it Materiale di laboratorio reperibile all indirizzo: www.gianlucadurelli.com
2013-2014 Matlab Laboratorio del 14/01/2014 Responsabili di laboratorio: Gianluca Durelli: durelli@elet.polimi.it Luigi Malago : malago@di.unimi.it Materiale di laboratorio reperibile all indirizzo: www.gianlucadurelli.com
Si consideri il sistema a coefficienti reali di m equazioni lineari in n incognite
 3 Sistemi lineari 3 Generalità Si consideri il sistema a coefficienti reali di m equazioni lineari in n incognite ovvero, in forma matriciale, a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n x
3 Sistemi lineari 3 Generalità Si consideri il sistema a coefficienti reali di m equazioni lineari in n incognite ovvero, in forma matriciale, a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n x
Laboratorio di Matematica Computazionale A.A Lab. 4
 Laboratorio di Matematica Computazionale A.A. 2008-2009 Lab. 4 Complementi di Grafica 2D: Sottofinestre In Matlab si possono disegnare più grafici nella stessa finestra, suddividendola in sottofinestre
Laboratorio di Matematica Computazionale A.A. 2008-2009 Lab. 4 Complementi di Grafica 2D: Sottofinestre In Matlab si possono disegnare più grafici nella stessa finestra, suddividendola in sottofinestre
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Prontuario degli argomenti di Algebra
 Prontuario degli argomenti di Algebra NUMERI RELATIVI Un numero relativo è un numero preceduto da un segno + o - indicante la posizione rispetto ad un punto di riferimento a cui si associa il valore 0.
Prontuario degli argomenti di Algebra NUMERI RELATIVI Un numero relativo è un numero preceduto da un segno + o - indicante la posizione rispetto ad un punto di riferimento a cui si associa il valore 0.
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
a) Determinare il dominio, i limiti agli estremi del dominio e gli eventuali asintoti di f. Determinare inoltre gli zeri di f e studiarne il segno.
 Determinare il dominio, i limiti agli estremi del dominio e gli eventuali asintoti di f. Determinare inoltre gli zeri di f e studiarne il segno.") 1 ESERCIZI CON SOLUZIONE DETTAGLIATA Esercizio 1. Si consideri la funzione f(x) = e x 3e x +. a) Determinare il dominio, i limiti agli estremi del dominio e gli eventuali asintoti di f. Determinare inoltre
1 ESERCIZI CON SOLUZIONE DETTAGLIATA Esercizio 1. Si consideri la funzione f(x) = e x 3e x +. a) Determinare il dominio, i limiti agli estremi del dominio e gli eventuali asintoti di f. Determinare inoltre
Equazioni e sistemi non lineari
 Capitolo 4 Equazioni e sistemi non lineari 4.1 Introduzione Sia f(x):ir IR una funzione continua almeno su un certo intervallo I e si supponga che f(x) non sia della forma f(x) = a 1 x + a 0 con a 1 e
Capitolo 4 Equazioni e sistemi non lineari 4.1 Introduzione Sia f(x):ir IR una funzione continua almeno su un certo intervallo I e si supponga che f(x) non sia della forma f(x) = a 1 x + a 0 con a 1 e
Corso di Laurea in Ingegneria Informatica Analisi Numerica
 Corso di Laurea in Ingegneria Informatica Lucio Demeio Dipartimento di Scienze Matematiche 1 2 Analisi degli errori Informazioni generali Libro di testo: J. D. Faires, R. Burden, Numerical Analysis, Brooks/Cole,
Corso di Laurea in Ingegneria Informatica Lucio Demeio Dipartimento di Scienze Matematiche 1 2 Analisi degli errori Informazioni generali Libro di testo: J. D. Faires, R. Burden, Numerical Analysis, Brooks/Cole,
SISTEMI LINEARI QUADRATI: METODI ITERATIVI
 SISTEMI LINEARI QUADRATI: METODI ITERATIVI CALCOLO NUMERICO e PROGRAMMAZIONE SISTEMI LINEARI QUADRATI:METODI ITERATIVI p./54 RICHIAMI di ALGEBRA LINEARE DEFINIZIONI A R n n simmetrica se A = A T ; A C
SISTEMI LINEARI QUADRATI: METODI ITERATIVI CALCOLO NUMERICO e PROGRAMMAZIONE SISTEMI LINEARI QUADRATI:METODI ITERATIVI p./54 RICHIAMI di ALGEBRA LINEARE DEFINIZIONI A R n n simmetrica se A = A T ; A C
RICHIAMI SU RETTA, PARABOLA E DISEQUAZIONI. Angela Donatiello 1
 RICHIAMI SU RETTA, PARABOLA E DISEQUAZIONI Angela Donatiello 1 Una funzione del tipo f() = m + q, con m e q numeri reali, è una FUNZIONE LINEARE. Il numero q è detto INTERCETTA o ORDINATA ALL ORIGINE,
RICHIAMI SU RETTA, PARABOLA E DISEQUAZIONI Angela Donatiello 1 Una funzione del tipo f() = m + q, con m e q numeri reali, è una FUNZIONE LINEARE. Il numero q è detto INTERCETTA o ORDINATA ALL ORIGINE,
CLASSIFICAZIONE DELLE CONICHE AFFINI
 CLASSIFICAZIONE DELLE CONICHE AFFINI Pre-requisiti necessari. Elementi di geometria analitica punti e rette nel piano cartesiano, conoscenza delle coniche in forma canonica). Risoluzione di equazioni e
CLASSIFICAZIONE DELLE CONICHE AFFINI Pre-requisiti necessari. Elementi di geometria analitica punti e rette nel piano cartesiano, conoscenza delle coniche in forma canonica). Risoluzione di equazioni e
0.1 Spazi Euclidei in generale
 0.1. SPAZI EUCLIDEI IN GENERALE 1 0.1 Spazi Euclidei in generale Sia V uno spazio vettoriale definito su R. Diremo, estendendo una definizione data in precedenza, che V è uno spazio vettoriale euclideo
0.1. SPAZI EUCLIDEI IN GENERALE 1 0.1 Spazi Euclidei in generale Sia V uno spazio vettoriale definito su R. Diremo, estendendo una definizione data in precedenza, che V è uno spazio vettoriale euclideo
[ RITORNA ALLE DOMANDE] 2) Definisci la parabola come luogo geometrico. 1) Che cos è una conica?
![[ RITORNA ALLE DOMANDE] 2) Definisci la parabola come luogo geometrico. 1) Che cos è una conica?](/thumbs/57/41170353.jpg "[ RITORNA ALLE DOMANDE] 2) Definisci la parabola come luogo geometrico. 1) Che cos è una conica?") Matematica 1) Che cos è una conica? 2) Definisci la parabola come luogo geometrico. 3) Qual è l equazione di una parabola con asse di simmetria parallelo all asse delle y? 4) Qual è l equazione di una
Matematica 1) Che cos è una conica? 2) Definisci la parabola come luogo geometrico. 3) Qual è l equazione di una parabola con asse di simmetria parallelo all asse delle y? 4) Qual è l equazione di una
II Esonero di Matematica Discreta - a.a. 06/07. Versione B
 II Esonero di Matematica Discreta - a.a. 06/07 1. Nell anello dei numeri interi Z: Versione B a. Determinare la scrittura posizionale in base 9 del numero che in base 10 si scrive) 5293 e la scrittura
II Esonero di Matematica Discreta - a.a. 06/07 1. Nell anello dei numeri interi Z: Versione B a. Determinare la scrittura posizionale in base 9 del numero che in base 10 si scrive) 5293 e la scrittura
Quale delle seguenti rappresentazioni del numero reale è in virgola mobile normalizzata?
 Quale delle seguenti istruzioni MATLAB esegue il calcolo del raggio spettrale di una matrice quadrata A? a. max(eig(abs(a))) b. max(abs(eig(a))) c. abs(max(eig(a))) d. max(abs(eig(a *A))) Il raggio spettrale
Quale delle seguenti istruzioni MATLAB esegue il calcolo del raggio spettrale di una matrice quadrata A? a. max(eig(abs(a))) b. max(abs(eig(a))) c. abs(max(eig(a))) d. max(abs(eig(a *A))) Il raggio spettrale
(Per scaricare il programma: cercare su Google download EffeDiX )
") EffeDiX 2012 (ver. 3.0) Attività (Per scaricare il programma: cercare su Google download EffeDiX ) Primo incontro Attività 1 Discutere graficamente l equazione letterale kx 2 + x + k = 0 Tracciare il grafico
EffeDiX 2012 (ver. 3.0) Attività (Per scaricare il programma: cercare su Google download EffeDiX ) Primo incontro Attività 1 Discutere graficamente l equazione letterale kx 2 + x + k = 0 Tracciare il grafico
Esercizi 2016/17 - Analisi I - Ing. Edile Architettura Esponenziali e logaritmi
 Esercizi 06/7 - Analisi I - Ing. Edile Architettura Esponenziali e logaritmi Esercizio. Risolvere la seguente equazione: Soluzione. ) x+ ) x 7 x = 0 7 L equazione è definita per ogni x 0, valore in cui
Esercizi 06/7 - Analisi I - Ing. Edile Architettura Esponenziali e logaritmi Esercizio. Risolvere la seguente equazione: Soluzione. ) x+ ) x 7 x = 0 7 L equazione è definita per ogni x 0, valore in cui
Calcolo del movimento di sistemi dinamici LTI
 Calcolo del movimento di sistemi dinamici LTI Analisi modale per sistemi dinamici LTI TC Modi naturali di un sistema dinamico Analisi modale Esercizio 1 Costante di tempo Esercizio 2 2 Analisi modale per
Calcolo del movimento di sistemi dinamici LTI Analisi modale per sistemi dinamici LTI TC Modi naturali di un sistema dinamico Analisi modale Esercizio 1 Costante di tempo Esercizio 2 2 Analisi modale per
TEMI D ESAME DI ANALISI MATEMATICA I
 TEMI D ESAME DI ANALISI MATEMATICA I Corso di laurea quadriennale) in Fisica a.a. 003/04 Prova scritta del 3 aprile 003 ] Siano a, c parametri reali. Studiare l esistenza e, in caso affermativo, calcolare
TEMI D ESAME DI ANALISI MATEMATICA I Corso di laurea quadriennale) in Fisica a.a. 003/04 Prova scritta del 3 aprile 003 ] Siano a, c parametri reali. Studiare l esistenza e, in caso affermativo, calcolare
Laurea triennale in Informatica Corso di Analisi matematica (A) a.a. 2007/08 9 giugno 2008
 a.a. 2007/08 9 giugno 2008") 9 giugno 2008 1. Data la funzione f(x) = x e 1/(x2 4), (c) stabilire se f ammette punti singolari e in caso affermativo classificarli; calcolare la derivata prima di f e utilizzarla per studiare la monotonia
9 giugno 2008 1. Data la funzione f(x) = x e 1/(x2 4), (c) stabilire se f ammette punti singolari e in caso affermativo classificarli; calcolare la derivata prima di f e utilizzarla per studiare la monotonia
Proposizioni. Negazione di una proposizione. Congiunzione e disgiunzione di due proposizioni. Predicati. Quantificatori.
 Corso di laurea in Ingegneria elettronica e informatica - A13 Programma di Analisi matematica 1 - A13106 Anno accademico 2015-2016 Prof. Giulio Starita 1 - Insiemi, logica, numeri I concetti primitivi.
Corso di laurea in Ingegneria elettronica e informatica - A13 Programma di Analisi matematica 1 - A13106 Anno accademico 2015-2016 Prof. Giulio Starita 1 - Insiemi, logica, numeri I concetti primitivi.
Conoscenze. L operazione di divisione (la divisione di due polinomi) - La divisibilità fra polinomi (la regola di Ruffini, il teorema. del resto.
 - La divisibilità fra polinomi (la regola di Ruffini, il teorema. del resto.") Classe: TERZA (Liceo Artistico) Pagina 1 / 2 della Matematica La scomposizione dei polinomi in fattori primi L operazione di divisione (la divisione di due polinomi) - La divisibilità fra polinomi (la
Classe: TERZA (Liceo Artistico) Pagina 1 / 2 della Matematica La scomposizione dei polinomi in fattori primi L operazione di divisione (la divisione di due polinomi) - La divisibilità fra polinomi (la
DERIVATE E LORO APPLICAZIONE
 DERIVATE E LORO APPLICAZIONE SIMONE ALGHISI 1. Applicazione del calcolo differenziale 1 Abbiamo visto a lezione che esiste un importante legame tra la continuità di una funzione y = f(x) in un punto x
DERIVATE E LORO APPLICAZIONE SIMONE ALGHISI 1. Applicazione del calcolo differenziale 1 Abbiamo visto a lezione che esiste un importante legame tra la continuità di una funzione y = f(x) in un punto x
Le derivate parziali
 Sia f(x, y) una funzione definita in un insieme aperto A R 2 e sia P 0 = x 0, y 0 un punto di A. Essendo A un aperto, esiste un intorno I(P 0, δ) A. Preso un punto P(x, y) I(P 0, δ), P P 0, possiamo definire
Sia f(x, y) una funzione definita in un insieme aperto A R 2 e sia P 0 = x 0, y 0 un punto di A. Essendo A un aperto, esiste un intorno I(P 0, δ) A. Preso un punto P(x, y) I(P 0, δ), P P 0, possiamo definire
UNITÀ DIDATTICA 2 LE FUNZIONI
 UNITÀ DIDATTICA LE FUNZIONI. Le funzioni Definizione. Siano A e B due sottoinsiemi non vuoti di R. Si chiama funzione di A in B una qualsiasi legge che fa corrispondere a ogni elemento A uno ed un solo
UNITÀ DIDATTICA LE FUNZIONI. Le funzioni Definizione. Siano A e B due sottoinsiemi non vuoti di R. Si chiama funzione di A in B una qualsiasi legge che fa corrispondere a ogni elemento A uno ed un solo
1 Fattorizzazione di polinomi
 1 Fattorizzazione di polinomi Polinomio: un polinomio di grado n nella variabile x, è dato da p(x) = a n x n + a n 1 x n 1 + + a 1 x + a 0 con a n 0, a 0 è detto termine noto, a k è detto coefficiente
1 Fattorizzazione di polinomi Polinomio: un polinomio di grado n nella variabile x, è dato da p(x) = a n x n + a n 1 x n 1 + + a 1 x + a 0 con a n 0, a 0 è detto termine noto, a k è detto coefficiente
Calcolo Differenziale. Corsi di Laurea in Tecniche di Radiologia ecc... A.A Analisi Matematica - Calcolo Differenziale - p.
 Calcolo Differenziale Corsi di Laurea in Tecniche di Radiologia ecc... A.A. 2010-2011 - Analisi Matematica - Calcolo Differenziale - p. 1/33 Velocità istantanea Percorriamo il tratto di strada tra Udine
Calcolo Differenziale Corsi di Laurea in Tecniche di Radiologia ecc... A.A. 2010-2011 - Analisi Matematica - Calcolo Differenziale - p. 1/33 Velocità istantanea Percorriamo il tratto di strada tra Udine
PROGRAMMA MATEMATICA Classe 1 A AFM anno scolastico
 Classe 1 A AFM anno scolastico 2014-2015 I numeri naturali rappresentazione dei numeri naturali, le quattro operazioni, multipli e divisori di un numero. Criteri di divisibilità, le potenze, le espressioni
Classe 1 A AFM anno scolastico 2014-2015 I numeri naturali rappresentazione dei numeri naturali, le quattro operazioni, multipli e divisori di un numero. Criteri di divisibilità, le potenze, le espressioni
( ) le colonne della matrice dei coefficienti, con. , risulta A 3 = A 1 + 4A 2 + 4A 5, A 4 = A 1 + A 2,
 le colonne della matrice dei coefficienti, con. , risulta A 3 = A 1 + 4A 2 + 4A 5, A 4 = A 1 + A 2,") 1 Elementi di Analisi Matematica e Ricerca Operativa prova del 6 luglio 2016 1) Discutere il seguente problema di Programmazione Lineare: Trovare il massimo di p x 1, x 2, x 3, x 4 # x 2 + 4 x 3 + x 4
1 Elementi di Analisi Matematica e Ricerca Operativa prova del 6 luglio 2016 1) Discutere il seguente problema di Programmazione Lineare: Trovare il massimo di p x 1, x 2, x 3, x 4 # x 2 + 4 x 3 + x 4
FUNZIONI LINEARI (Retta, punto di pareggio e relazioni lineari generalizzate)
") FUNZIONI LINEARI (Retta, punto di pareggio e relazioni lineari generalizzate) Copyright SDA Bocconi, Milano La retta Una retta può essere espressa secondo due formulazioni: a. Forma esplicita b. Forma
FUNZIONI LINEARI (Retta, punto di pareggio e relazioni lineari generalizzate) Copyright SDA Bocconi, Milano La retta Una retta può essere espressa secondo due formulazioni: a. Forma esplicita b. Forma
ISTITUTO SUPERIORE XXV APRILE LICEO CLASSICO ANDREA DA PONTEDERA classi 5A-5B PROGRAMMA DI MATEMATICA
 ISTITUTO SUPERIORE XXV APRILE LICEO CLASSICO ANDREA DA PONTEDERA classi 5A-5B PROGRAMMA DI MATEMATICA PRIMA PARTE Intervallo limitato di numeri reali Dati due numeri reali a e b, con a
ISTITUTO SUPERIORE XXV APRILE LICEO CLASSICO ANDREA DA PONTEDERA classi 5A-5B PROGRAMMA DI MATEMATICA PRIMA PARTE Intervallo limitato di numeri reali Dati due numeri reali a e b, con a
PIANO CARTESIANO e RETTE classi 2 A/D 2009/2010
 PIANO CARTESIANO e RETTE classi 2 A/D 2009/2010 1) PIANO CARTESIANO serve per indicare, identificare, chiamare... ogni PUNTO del piano (ente geometrico) con una coppia di valori numerici (detti COORDINATE).
PIANO CARTESIANO e RETTE classi 2 A/D 2009/2010 1) PIANO CARTESIANO serve per indicare, identificare, chiamare... ogni PUNTO del piano (ente geometrico) con una coppia di valori numerici (detti COORDINATE).
(x B x A, y B y A ) = (4, 2) ha modulo
 = (4, 2) ha modulo") GEOMETRIA PIANA 1. Esercizi Esercizio 1. Dati i punti A(0, 4), e B(4, ) trovarne la distanza e trovare poi i punti C allineati con A e con B che verificano: (1) AC = CB (punto medio del segmento AB); ()
GEOMETRIA PIANA 1. Esercizi Esercizio 1. Dati i punti A(0, 4), e B(4, ) trovarne la distanza e trovare poi i punti C allineati con A e con B che verificano: (1) AC = CB (punto medio del segmento AB); ()
25 IL RAPPORTO INCREMENTALE - DERIVATE
 25 IL RAPPORTO INCREMENTALE - DERIVATE Definizione Sia f una funzione reale di variabile reale. Allora, dati x, y domf con x y, si definisce il rapporto incrementale di f tra x e y come P f (x, y = f(x
25 IL RAPPORTO INCREMENTALE - DERIVATE Definizione Sia f una funzione reale di variabile reale. Allora, dati x, y domf con x y, si definisce il rapporto incrementale di f tra x e y come P f (x, y = f(x
01. Modelli di Sistemi
 Controlli Automatici 01. Modelli di Sistemi Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it
Controlli Automatici 01. Modelli di Sistemi Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it
Sistemi lineari. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Traccia n.1 Studiare il comportamento della funzione: 3x + ex 3x e x. Svolgimento
 Traccia n. Studiare il comportamento della funzione: Svolgimento f(x) = 3x + ex 3x e x Determinazione del campo di esistenza, E[f]. La funzione si presenta come rapporto di due funzioni; il campo di esistenza
Traccia n. Studiare il comportamento della funzione: Svolgimento f(x) = 3x + ex 3x e x Determinazione del campo di esistenza, E[f]. La funzione si presenta come rapporto di due funzioni; il campo di esistenza
Corso di laurea: Ingegneria Civile Programma di Fondamenti di Analisi Matematica I a.a. 2011/2012 Docenti: Fabio Paronetto e Fabio Ancona
 Corso di laurea: Ingegneria Civile Programma di Fondamenti di Analisi Matematica I a.a. 2011/2012 Docenti: Fabio Paronetto e Fabio Ancona Gli argomenti denotati con un asterisco tra parentesi sono stati
Corso di laurea: Ingegneria Civile Programma di Fondamenti di Analisi Matematica I a.a. 2011/2012 Docenti: Fabio Paronetto e Fabio Ancona Gli argomenti denotati con un asterisco tra parentesi sono stati
FUNZIONI E INSIEMI DI DEFINIZIONE
 FUNZIONI E INSIEMI DI DEFINIZIONE In matematica, una funzione f da X in Y consiste in: ) un insieme X detto insieme di definizione I.d.D. (o dominio) di f 2) un insieme Y detto codominio di f 3) una legge
FUNZIONI E INSIEMI DI DEFINIZIONE In matematica, una funzione f da X in Y consiste in: ) un insieme X detto insieme di definizione I.d.D. (o dominio) di f 2) un insieme Y detto codominio di f 3) una legge
Corso di Calcolo Numerico
 Corso di Laurea in Ingegneria Gestionale Sede di Fermo Corso di 7 - CALCOLO NUMERICO CON MATRICI Richiami teorici Operazioni fondamentali Siano A = {a ij } e B = {b ij }, i = 1,..., m, j = 1,..., n due
Corso di Laurea in Ingegneria Gestionale Sede di Fermo Corso di 7 - CALCOLO NUMERICO CON MATRICI Richiami teorici Operazioni fondamentali Siano A = {a ij } e B = {b ij }, i = 1,..., m, j = 1,..., n due
Programma di matematica classe Prima
 Programma di matematica classe Prima RELAZIONI E FUNZIONI Insiemi Definizione e rappresentazione con diagrammi di Venn, per elencazione, per caratteristica. Operazioni tra insiemi: intersezione, unione,
Programma di matematica classe Prima RELAZIONI E FUNZIONI Insiemi Definizione e rappresentazione con diagrammi di Venn, per elencazione, per caratteristica. Operazioni tra insiemi: intersezione, unione,
PROGRAMMA MATEMATICA Classe 1 A AFM anno scolastico
 PROGRAMMA MATEMATICA Classe 1 A AFM anno scolastico 2015-2016 I numeri naturali rappresentazione dei numeri naturali, le quattro operazioni, multipli e divisori di un numero. Criteri di divisibilità, le
PROGRAMMA MATEMATICA Classe 1 A AFM anno scolastico 2015-2016 I numeri naturali rappresentazione dei numeri naturali, le quattro operazioni, multipli e divisori di un numero. Criteri di divisibilità, le
Sapienza Università di Roma Corso di laurea in Ingegneria Energetica Geometria A.A ESERCIZI DA CONSEGNARE prof.
 Sapienza Università di Roma Corso di laurea in Ingegneria Energetica Geometria A.A. 2015-2016 ESERCIZI DA CONSEGNARE prof. Cigliola Consegna per Martedì 6 Ottobre Esercizio 1. Una matrice quadrata A si
Sapienza Università di Roma Corso di laurea in Ingegneria Energetica Geometria A.A. 2015-2016 ESERCIZI DA CONSEGNARE prof. Cigliola Consegna per Martedì 6 Ottobre Esercizio 1. Una matrice quadrata A si
APPROSSIMAZIONE di FUNZIONI
 APPROSSIMAZIONE di FUNZIONI Francesca Pelosi Dipartimento di Sc. Matematiche ed Informatiche, Università di Siena CALCOLO NUMERICO a.a. 26 27 APPROSSIMAZIONE di FUNZIONI p.1/3 APPROSSIMAZIONE di FUNZIONI:
APPROSSIMAZIONE di FUNZIONI Francesca Pelosi Dipartimento di Sc. Matematiche ed Informatiche, Università di Siena CALCOLO NUMERICO a.a. 26 27 APPROSSIMAZIONE di FUNZIONI p.1/3 APPROSSIMAZIONE di FUNZIONI:
Funzioni. iniettiva se x y = f (x) f (y) o, equivalentemente, f (x) = f (y) = x = y
 f (y) o, equivalentemente, f (x) = f (y) = x = y") Funzioni. Dati due insiemi A e B (non necessariamente distinti) si chiama funzione da A a B una qualunque corrispondenza (formula, regola) che associa ad ogni elemento di A uno ed un solo elemento di B.
Funzioni. Dati due insiemi A e B (non necessariamente distinti) si chiama funzione da A a B una qualunque corrispondenza (formula, regola) che associa ad ogni elemento di A uno ed un solo elemento di B.