METODI PER LA PROGETTAZIONE INDUSTRIALE. Prof. G. Fargione a.a. 2011/12
|
|
|
- Arrigo Calo
- 6 anni fa
- Visualizzazioni
Transcript
1 METODI PER LA PROGETTAZIONE INDUSTRIALE Prof. G. Fargione a.a. 2011/12
2 La concretizzazione qualitativa Corrisponde a rivestire con determinate forme e materiali lo schema del principio, può venire espressa attraverso il disegno di un complessivo. 1)Individuazione del principio 2)Analisi della funzione 3)Concretizzazione delle funzioni componenti 4)Scelta della soluzione costruttiva
3 1) Il principio più adatto viene scelto o con l esperienza del progettista o applicando le metodologie DfX, esempio: a) Rotazione di un corpo rigido attorno ad un sistema fisso (cerniera cilindrica) b) Rotazione di 90 della linea di azione di una forza
4 2) La funzione generale svolta dal principio viene rappresentato da uno schema, esempi: a)cerniera cilindrica: le funzioni componenti individuate sono F1 = bloccare l asse di rotazione; F2 = consentire le rotazioni; F3 = Impedire gli spostamenti assiali non voluti. b)leva a squadra: F1 = applicazione azione motrice; F2 = applicazione della forza ruotata di 90 ; F3 = vincolo alle parti fisse; F4 = continuità fisica.

 Cerniera cilindrica")
5 3) Concretizzazione delle funzioni componenti, mediante soluzioni costruttive desumibili con procedimenti analoghi a quelli dei principi a) Cerniera cilindrica b) Leva a squadra

6
7 4) Scelta della soluzione costruttiva, data una funzione esistono plurime soluzioni atte a svolgerla ma con modalità diverse fra loro. Esempio: matrice delle valutazioni applicato alla scelta di una sezione (piena o cava). a) Tradizionale: si sfoglia un catalogo b) Informatica: il progettista entra nel catalogo con pesi assegnati alle diverse caratteristiche b1)preselezione: partendo dalle esigenze del progettista in termini di pressione, diametro nominale e tipo di fluido (o classe ANSI) b2) le valvole emerse a livello precedente sono valutate in relazione alloro comportamento nei confronti delle caratteristiche emerse dal ciclo di vita
8 La concretizzazione quantitativa 1) Principi generali 2) Proporzionamento 3) Verifica 1)Il progettista affronta i problemi di definizione quantitativa della soluzione scelta: Proporzionamento, relativo a: dimensioni; errori di lavorazione ammissibili; materiali e trattamenti termici. Verifica di massima, volta a fornire un criterio di valutazione sia delle sollecitazioni agenti, sia della sua accattabilità. 2) Nella fase di proporzionamento è opportuno fare riferimento alla corrente pratica costruttiva riflessa sia delle indicazioni bibliografiche, sia da rilievi diretti esaminati criticamente 3) Verifica di massima, è un criterio rapido atto a fornire un criterio di valutazione sia della sollecitazione agente, sia della sua accettabilità. Essa agisce sul proporzionamento.
9 Posizionamento Dati due pezzi meccanici, il reciproco vincolo totale, che porta ad un unico pezzo monolitico composto da due, può venire in molti casi casi preceduto da un posizionamento, cioè un vincolo parziale, atto a eliminare movimenti relativi non voluti che ostacolano il successivo collegamento. Le funzioni componenti sono riconducibili alle seguenti: a) Contatto assiale b) Contatto trasversale c) Evitare contatti anomali d) Facilitare il montaggio
10
11
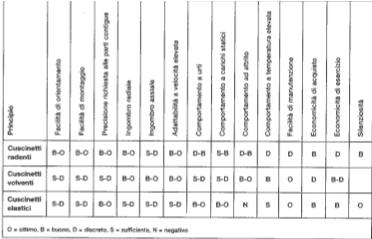
12 VINCOLO Il vincolo è definibile come l esclusione di alcuni gradi di libertà relativi fra due elementi appartenenti a due oggetti distinti ( in particolare, un elemento interno ed esterno). Il vincolo può essere: a) Radiale, che consente traslazioni assiali o rotazioni relative b) Radiale e assiale, che consente solo rotazioni relative c) Radiale e tangenziale, che consente solo traslazioni relative d) Totale, che non consente alcun movimento relativo. VINCOLO RADIALE Le grandi famiglie di soluzioni costruttive così scaturenti sono riconducibili ai cuscinetti e alle guide lineari Ricordiamo che i cuscinetti possono dividersi in radenti volventi ed elastici. La tabella riporta un criterio di selezione dei cuscinetti
13
14 VINCOLO ASSIALE
15 VINCOLO RADIALE E TANGENZIALE Funzione Pricipi di forza, di forma
16
17
18 Principi di forma con elementi interposti
19
20
21
22 TRASMISSIONE DEL MOTO Si intende per trasmissione del moto lo spostamento del moto stesso, senza variarne le caratteristiche. Trasmissione del moto rotatorio
23 Con riferimento ad un principio meccanico, definiti albero il solido sollecitato a torsione, mozzi i collegamenti con l entrata e l uscita del moto e sostegni i vincoli radiali con i cuscinetti. Con riferimento a tali schemi le funzioni componenti sono riconducibili alle seguenti: F1 = ricevimento del moto F2 = cessione del moto F3 = sostegno del moto F4 = continuità fisica
24
25
26 Trasmissione corrispondente ad una trazione Formazione di un archivio di principi: Funzioni componenti F1, F2 = applicazione delle forze; F3 = continuità fisica Esempi di principi per lo svolgimento delle funzioni F1 e F2 sono riportati nella figura che segue
27
28 Per quanto riguarda la forza F3 i principi fondamentali sono: 1)Elemento rigido: esso corrisponde formalmente, all elemento compresso; 2)Elemento flessibile: questo principio corrisponde alle funi; 3)Elemento articolato: esso corrisponde alle catene.
29 TRASMISSIONE CORRISPONDENTE A UNA COMPRESSIONE Un approccio alla formazione di un archivio di principi è il seguente
30 Le funzioni componenti nel caso di principio meccanico sono: F1, F2 = applicazione delle forze; F2 = continuità fisica La funzione F1 (applicazione della forza di ingresso) ha, come
31
32 TRASFORMAZIONE DEL MOTO Si intende per trasformazione del moto la variazione di caratteristiche (intensità, direzione, verso) Trasformazione del moto rotatorio La funzione trasformazione del moto rotatorio corrisponde al passaggio da situazione iniziale (velocità angolare n1 coppia M1) a una situazione finale (con velocità angolare n2 e coppia M2). L a seguente tabella mostra un approccio alla costituzione di un archivio dei relativi principi meccanici
33 Trasformazione del moto traslatorio La funzione trasformazione del moto traslatorio è Essa comporta in generale una variazione di forza e velocità, un approccio all individuazione dei principi è:
34
")
35 Elementi rigidi singoli Elementi rigidi uniti a deformabili a) Carrucola fissa
36 b) Carrucola mobile Le funzioni componenti sono riconducibili alle seguenti:
I CUSCINETTI VOLVENTI
 I CUSCINETTI VOLVENTI COSA SONO? Organi meccanici interposti tra albero e struttura rigida con lo scopo di: favorire la rotazione regolare dell albero ridurre al minimo l attrito sopportare le forze trasmesse
I CUSCINETTI VOLVENTI COSA SONO? Organi meccanici interposti tra albero e struttura rigida con lo scopo di: favorire la rotazione regolare dell albero ridurre al minimo l attrito sopportare le forze trasmesse
Alberi e perni Accoppiamenti albero e mozzo con linguette, chiavette, alberi scanalati e spine
 Istituto Istruzione Superiore G. Boris Giuliano" Via Carducci, 13-94015 Piazza Armerina (En) Corso di Tecnologie Meccaniche e Applicazioni Anno scolastico 2015-2016 Docente: Ing. Filippo Giustra Alberi
Istituto Istruzione Superiore G. Boris Giuliano" Via Carducci, 13-94015 Piazza Armerina (En) Corso di Tecnologie Meccaniche e Applicazioni Anno scolastico 2015-2016 Docente: Ing. Filippo Giustra Alberi
Laboratorio di Disegno Assistito dal Calcolatore
 Laboratorio di Disegno Assistito dal Calcolatore Luca Cortese c/o Dipartimento di Meccanica ed Aeronautica Ufficio n 20, via Eudossiana 18 tel. 06 44 585 236 e-mail: luca.cortese@uniroma1.it Laboratorio
Laboratorio di Disegno Assistito dal Calcolatore Luca Cortese c/o Dipartimento di Meccanica ed Aeronautica Ufficio n 20, via Eudossiana 18 tel. 06 44 585 236 e-mail: luca.cortese@uniroma1.it Laboratorio
Laboratorio di Tecnologie Biomediche
 Laboratorio di Tecnologie Biomediche Collegamenti meccanici Carmelo De Maria carmelo.demaria@unipi.it Imbiettamenti collegamenti di tipo smontabile che hanno per scopo quello di impedire la rotazione relativa
Laboratorio di Tecnologie Biomediche Collegamenti meccanici Carmelo De Maria carmelo.demaria@unipi.it Imbiettamenti collegamenti di tipo smontabile che hanno per scopo quello di impedire la rotazione relativa
Modulo 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria
 Progettazione Disciplinare 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria Segmento 01 : Principio di omogeneità Presentazione: il modulo è propedeutico agli argomenti che
Progettazione Disciplinare 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria Segmento 01 : Principio di omogeneità Presentazione: il modulo è propedeutico agli argomenti che
RUOTA LIBERA PER ALTERNATORE
 OSSERVAZIONI TECNICHE RUOTA LIBERA PER ALTERNATORE Il ciclo di combustione di un motore endotermico accelera e rallenta il movimento rotatorio dell'albero a gomiti. Semplificando, in fase di scoppio abbiamo
OSSERVAZIONI TECNICHE RUOTA LIBERA PER ALTERNATORE Il ciclo di combustione di un motore endotermico accelera e rallenta il movimento rotatorio dell'albero a gomiti. Semplificando, in fase di scoppio abbiamo
Laboratorio di Disegno Assistito dal Calcolatore
 Laboratorio di Disegno Assistito dal Calcolatore Luca Cortese c/o Dipartimento di Meccanica ed Aeronautica Ufficio n 20, via Eudossiana 18 tel. 06 44 585 236 e-mail: luca.cortese@uniroma1.it Laboratorio
Laboratorio di Disegno Assistito dal Calcolatore Luca Cortese c/o Dipartimento di Meccanica ed Aeronautica Ufficio n 20, via Eudossiana 18 tel. 06 44 585 236 e-mail: luca.cortese@uniroma1.it Laboratorio
L equilibrio dei corpi solidi
 1 L equilibrio dei corpi Quando un corpo è fermo e rimane fermo al trascorrere del tempo, diciamo che quel corpo è in equilibrio. Si definisce corpo rigido un corpo che non si deforma nonostante su di
1 L equilibrio dei corpi Quando un corpo è fermo e rimane fermo al trascorrere del tempo, diciamo che quel corpo è in equilibrio. Si definisce corpo rigido un corpo che non si deforma nonostante su di
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 5
 Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
SOLUZIONE DELLA TRACCIA N 2
 SOLUZIONE DELLA TRACCIA N La presente soluzione verrà redatta facendo riferimento al manuale: Caligaris, Fava, Tomasello Manuale di Meccanica Hoepli. - Studio delle sollecitazioni in gioco Si calcolano
SOLUZIONE DELLA TRACCIA N La presente soluzione verrà redatta facendo riferimento al manuale: Caligaris, Fava, Tomasello Manuale di Meccanica Hoepli. - Studio delle sollecitazioni in gioco Si calcolano
Università del Salento Facoltà di Ingegneria. Costruzione di Macchine
 Università del Salento Facoltà di Ingegneria Costruzione di Macchine I giunti meccanici a cura dell ing. Riccardo Nobile 1 I giunti meccanici I giunti sono degli organi meccanici utilizzati per realizzare
Università del Salento Facoltà di Ingegneria Costruzione di Macchine I giunti meccanici a cura dell ing. Riccardo Nobile 1 I giunti meccanici I giunti sono degli organi meccanici utilizzati per realizzare
Freni. I freni sono dispositivi atti a creare resistenza al moto allo scopo di impedirne l inizio o per regolarne la velocità o l accelerazione.
 Generalità Freni I freni sono dispositivi atti a creare resistenza al moto allo scopo di impedirne l inizio o per regolarne la velocità o l accelerazione. A seconda del tipo di resistenza si distinguono
Generalità Freni I freni sono dispositivi atti a creare resistenza al moto allo scopo di impedirne l inizio o per regolarne la velocità o l accelerazione. A seconda del tipo di resistenza si distinguono
Collegamenti tra albero e mozzo
 Collegamenti tra albero e mozzo L albero è un corpo cilindrico a più gradini su cui sono calettati gli organi rotanti, da cui riceve o a cui trasmette il moto Supporti Gli elementi caratteristici degli
Collegamenti tra albero e mozzo L albero è un corpo cilindrico a più gradini su cui sono calettati gli organi rotanti, da cui riceve o a cui trasmette il moto Supporti Gli elementi caratteristici degli
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
Sollecitazioni delle strutture
 Sollecitazioni delle strutture I pilastri e i muri portanti sono tipicamente sollecitati a compressione Le travi e i solai sono sollecitati a flessione L indeformabilità di questi elementi costruttivi
Sollecitazioni delle strutture I pilastri e i muri portanti sono tipicamente sollecitati a compressione Le travi e i solai sono sollecitati a flessione L indeformabilità di questi elementi costruttivi
Cinematica ed equilibrio del corpo rigido
 omportamento meccanico dei materiali inematica piana omportamento meccanico dei materiali inematica ed equilibrio del corpo rigido inematica piana Equilibrio esterno aratteristiche di sollecitazione 2
omportamento meccanico dei materiali inematica piana omportamento meccanico dei materiali inematica ed equilibrio del corpo rigido inematica piana Equilibrio esterno aratteristiche di sollecitazione 2
3.6.3 Esercizio Esercizio... 85
 Indice 1 Movimenti rigidi 1 1.1 Trasformazioni nello spazio R 3.................. 1 1.2 Trasformazioni rigide........................ 2 1.2.1 Espressione generale di una trasformazione rigida.... 3 1.2.2
Indice 1 Movimenti rigidi 1 1.1 Trasformazioni nello spazio R 3.................. 1 1.2 Trasformazioni rigide........................ 2 1.2.1 Espressione generale di una trasformazione rigida.... 3 1.2.2
Anno accademico 2005-06
 Universita degli Studi di Firenze Dipartimento di Meccanica e Tecnologie Industriali CORSO DI: DISEGNO MECCANICO (FI) CORSO DI: DISEGNO TECNICO IND.LE (PO) Docenti: Anno accademico 2005-06 Modulo 6: Elementi
Universita degli Studi di Firenze Dipartimento di Meccanica e Tecnologie Industriali CORSO DI: DISEGNO MECCANICO (FI) CORSO DI: DISEGNO TECNICO IND.LE (PO) Docenti: Anno accademico 2005-06 Modulo 6: Elementi
Statica del corpo rigido. Condizioni di equilibrio. Calcolo delle Reazioni Vincolari
 Statica del corpo rigido Condizioni di equilibrio Calcolo delle Reazioni incolari Obiettivo della lezione: apprendere le equazioni cardinali della statica e applicarle al calcolo delle reazioni vincolari.
Statica del corpo rigido Condizioni di equilibrio Calcolo delle Reazioni incolari Obiettivo della lezione: apprendere le equazioni cardinali della statica e applicarle al calcolo delle reazioni vincolari.
ESAME DI STATO 2012/2013 INDIRIZZO MECCANICA
 ESAME DI STATO 2012/2013 INDIRIZZO MECCANICA TEMA DI:DISEGNO, PROGETTAZIONE, ORGANIZZAZIONE INDUSTRIALE Dimensionamento dell albero L albero rappresentato nell allegato può essere assimilato ad una trave
ESAME DI STATO 2012/2013 INDIRIZZO MECCANICA TEMA DI:DISEGNO, PROGETTAZIONE, ORGANIZZAZIONE INDUSTRIALE Dimensionamento dell albero L albero rappresentato nell allegato può essere assimilato ad una trave
I CUSCINETTI VOLVENTI
 I CUSCINETTI VOLVENTI Il cuscinetto volvente, detto anche cuscinetto a rotolamento, è un elemento posizionato tra il perno di un albero e il sopporto, nel quale il movimento relativo tra parte rotante
I CUSCINETTI VOLVENTI Il cuscinetto volvente, detto anche cuscinetto a rotolamento, è un elemento posizionato tra il perno di un albero e il sopporto, nel quale il movimento relativo tra parte rotante
Trasmissione di potenza
 Trasmissione di potenza Alberi Lo scopo di questi appunti è quello di introdurre alla comprensione della funzione degli alberi e alle loro regole di disegno e rappresentazione. Esercitarsi nella rappresentazione
Trasmissione di potenza Alberi Lo scopo di questi appunti è quello di introdurre alla comprensione della funzione degli alberi e alle loro regole di disegno e rappresentazione. Esercitarsi nella rappresentazione
ITIS OTHOCA ORISTANO GLI ALBERI DI TRASMISSIONE E LORO PERNI
 ITIS OTHOCA ORISTANO GLI ALBERI DI TRASMISSIONE E LORO PERNI L'albero di trasmissione è l'organo rotante di una macchina che ha la funzione di trasmettere o ricevere coppie motrici (o resistenti) tra gli
ITIS OTHOCA ORISTANO GLI ALBERI DI TRASMISSIONE E LORO PERNI L'albero di trasmissione è l'organo rotante di una macchina che ha la funzione di trasmettere o ricevere coppie motrici (o resistenti) tra gli
Reazioni vincolari. Sistemi di corpi rigidi. Resistenza dei materiali. Forme strutturali per il design A.A prof.
 Resistenza dei materiali e Forme strutturali per il design A.A. 2014-2015 prof. Andrea Dall Asta Reazioni vincolari e Sistemi di corpi rigidi Scuola di Architettura e Design, Università di Camerino e-mail:andrea.dallasta@unicam.it
Resistenza dei materiali e Forme strutturali per il design A.A. 2014-2015 prof. Andrea Dall Asta Reazioni vincolari e Sistemi di corpi rigidi Scuola di Architettura e Design, Università di Camerino e-mail:andrea.dallasta@unicam.it
Capitolo 3 La torsione Sollecitazioni semplici: la torsione
 Capitolo 3 La torsione Sollecitazioni semplici: la torsione Definizione Un elemento strutturale è soggetto a sollecitazione di torsione quando su di esso agiscono due momenti uguali ed opposti giacenti
Capitolo 3 La torsione Sollecitazioni semplici: la torsione Definizione Un elemento strutturale è soggetto a sollecitazione di torsione quando su di esso agiscono due momenti uguali ed opposti giacenti
Le condizioni di equilibrio di un punto materiale Giuseppe Frangiamore con la collaborazione di Daniele Alessi
 Le condizioni di equilibrio di un punto materiale Giuseppe Frangiamore con la collaborazione di Daniele Alessi Un punto materiale soggetto a più forze rimane in equilibrio se il vettore risultante (R)
Le condizioni di equilibrio di un punto materiale Giuseppe Frangiamore con la collaborazione di Daniele Alessi Un punto materiale soggetto a più forze rimane in equilibrio se il vettore risultante (R)
Cuscinetti a strisciamento e a rotolamento
 Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
METODI DI RAPPRESENTAZIONE DI UN SISTEMA
 METODI DI RAPPRESENTAZIONE DI UN SISTEMA PROPRIETA ELEMENTARI Proprietà elementari dei componenti idraulici Proprietà elementari dei componenti termici Proprietà elementari dei componenti meccanici Proprietà
METODI DI RAPPRESENTAZIONE DI UN SISTEMA PROPRIETA ELEMENTARI Proprietà elementari dei componenti idraulici Proprietà elementari dei componenti termici Proprietà elementari dei componenti meccanici Proprietà
Collegamenti tra organi rotanti: accoppiamento albero-mozzo
 Accoppiamenti albero-mozzo Collegamenti tra organi rotanti: accoppiamento albero-mozzo Accoppiamenti albero-mozzo Accoppiamenti albero-mozzo 3 Accoppiamenti albero-mozzo 4 Accoppiamenti albero-mozzo Compito
Accoppiamenti albero-mozzo Collegamenti tra organi rotanti: accoppiamento albero-mozzo Accoppiamenti albero-mozzo Accoppiamenti albero-mozzo 3 Accoppiamenti albero-mozzo 4 Accoppiamenti albero-mozzo Compito
-gdl>gdv il sistema è staticamente labile (trave labile, cioè in grado di muoversi);
;") Meccanica a trave Trave in equilibrio con due vincoli I gradi di libertà per un corpo sul piano sono 3, mentre quelli di un corpo nello spazio sono 6. Consideriamo un sistema di riferimento formato da:
Meccanica a trave Trave in equilibrio con due vincoli I gradi di libertà per un corpo sul piano sono 3, mentre quelli di un corpo nello spazio sono 6. Consideriamo un sistema di riferimento formato da:
1.3 Sistemi non lineari ad 1 grado di libertà. 1.4 Sistemi non lineari a 2 gradi di libertà 1.5 Sistemi multicorpo. 1.6 La dinamica del corpo rigido
 V Indice XIII XVII 1 1 12 13 19 21 23 25 26 27 27 34 43 52 54 57 62 64 67 67 69 73 75 79 82 Prefazione Introduzione Cap. 1 Sistemi multi-corpo a 1-n gradi di libertà 1.1 Coordinate cartesiane, gradi di
V Indice XIII XVII 1 1 12 13 19 21 23 25 26 27 27 34 43 52 54 57 62 64 67 67 69 73 75 79 82 Prefazione Introduzione Cap. 1 Sistemi multi-corpo a 1-n gradi di libertà 1.1 Coordinate cartesiane, gradi di
Ministero dell Istruzione dell Università e della Ricerca M552 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE
 Pag. 1/1 Sessione ordinaria 2010 Seconda prova scritta Ministero dell Istruzione dell Università e della Ricerca M552 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: MECCANICA
Pag. 1/1 Sessione ordinaria 2010 Seconda prova scritta Ministero dell Istruzione dell Università e della Ricerca M552 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: MECCANICA
Disegno di Macchine. Lezione n 10 Cuscinetti radenti e volventi. corso per I anno della laurea in ing. meccanica Docente: ing.
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 10 Cuscinetti radenti e volventi Supporti e Cuscinetti I supporti sorreggono gli elementi rotanti
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 10 Cuscinetti radenti e volventi Supporti e Cuscinetti I supporti sorreggono gli elementi rotanti
Fondamenti di Meccanica Esame del
 Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
CORSO DI LAUREA IN ING. ELETTRICA CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE ANNO ACCADEMICO VERIFICA DI RIGIDEZZA DI ALBERO
 CORSO DI LAUREA IN ING. ELETTRICA CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE ANNO ACCADEMICO 25-6 VERIFICA DI RIGIDEZZA DI ALBERO E' dato l'albero riportato in Figura, recante all'estermità
CORSO DI LAUREA IN ING. ELETTRICA CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE ANNO ACCADEMICO 25-6 VERIFICA DI RIGIDEZZA DI ALBERO E' dato l'albero riportato in Figura, recante all'estermità
Meccanica Applicata alle Macchine
 Meccanica Applicata alle Macchine 06-11-013 TEMA A 1. Un cilindro ed una sfera omogenei di uguale massa m ed uguale raggio r sono collegati tra loro da un telaio di massa trascurabile mediante coppie rotoidali
Meccanica Applicata alle Macchine 06-11-013 TEMA A 1. Un cilindro ed una sfera omogenei di uguale massa m ed uguale raggio r sono collegati tra loro da un telaio di massa trascurabile mediante coppie rotoidali
Costruzione di Macchine Verifica a fatica degli elementi delle macchine
 Costruzione di Macchine Verifica a fatica degli elementi delle macchine In figura 1 è rappresentato schematicamente un mescolatore: l albero con la paletta è mosso da un motore elettrico asincrono trifase
Costruzione di Macchine Verifica a fatica degli elementi delle macchine In figura 1 è rappresentato schematicamente un mescolatore: l albero con la paletta è mosso da un motore elettrico asincrono trifase
VERIFICA DI MECCANISMI LOCALI DI COLLASSO. Edifici esistenti
 VERIFICA DI MECCANISMI LOCALI DI COLLASSO Edifici esistenti Comportamento sismico delle strutture in muratura edifici esistenti in muratura L IMPIANTO STRUTTURALE Muri Paralleli o nel piano Muri Ortogonali
VERIFICA DI MECCANISMI LOCALI DI COLLASSO Edifici esistenti Comportamento sismico delle strutture in muratura edifici esistenti in muratura L IMPIANTO STRUTTURALE Muri Paralleli o nel piano Muri Ortogonali
Componente o organo meccanico di macchina, che trasmette Coppia (Momento torcente, Potenza), col movimento di rotazione.
, col movimento di rotazione.") $/%(5,(02==,- 1a Parte - *** Definizione, Elementi caratteristici, Esempi, Punti di forza, Posizionamento, Mozzo, Immagine di ruote, mozzo albero, ruota dentata a modulo, Tipi di collegamento fra albero
$/%(5,(02==,- 1a Parte - *** Definizione, Elementi caratteristici, Esempi, Punti di forza, Posizionamento, Mozzo, Immagine di ruote, mozzo albero, ruota dentata a modulo, Tipi di collegamento fra albero
Capitolo 3 La torsione Sollecitazioni semplici: la torsione
 Capitolo 3 La torsione Sollecitazioni semplici: la torsione Definizione Un elemento strutturale è soggetto a sollecitazione di torsione quando su di esso agiscono due momenti uguali ed opposti giacenti
Capitolo 3 La torsione Sollecitazioni semplici: la torsione Definizione Un elemento strutturale è soggetto a sollecitazione di torsione quando su di esso agiscono due momenti uguali ed opposti giacenti
Meccanica. 5. Cinematica del Corpo Rigido. Domenico Galli. Dipartimento di Fisica e Astronomia
 Meccanica 5. Cinematica del Corpo Rigido http://campus.cib.unibo.it/252232/ Domenico Galli Dipartimento di Fisica e Astronomia 22 febbraio 2017 Traccia 1. 2. 2 Si chiama numero dei gradi di libertà (GdL)
Meccanica 5. Cinematica del Corpo Rigido http://campus.cib.unibo.it/252232/ Domenico Galli Dipartimento di Fisica e Astronomia 22 febbraio 2017 Traccia 1. 2. 2 Si chiama numero dei gradi di libertà (GdL)
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA. OBIETTIVI U. D. n 1.2: La rappresentazione di dati e fenomeni
 FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
le lavorazioni a freddo asportazione di
 le lavorazioni a freddo asportazione di le lavorazioni ad asportazione di truciolo la struttura truciolo delle macchine utensili lo studio del processo di asportazione di truciolo riveste un importanza
le lavorazioni a freddo asportazione di le lavorazioni ad asportazione di truciolo la struttura truciolo delle macchine utensili lo studio del processo di asportazione di truciolo riveste un importanza
UNIVERSITA DEGLI STUDI DI BRESCIA
 UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
Ammortizzatore corsa 15. Serie *-0
 Ammortizzatore corsa 15 Serie 4-1621-*-0 Requisiti Gli ammortizzatori della serie 4-1621- * -0 sono dispositivi studiati per convertire in energia termica l energia cinetica generata da organi meccanici
Ammortizzatore corsa 15 Serie 4-1621-*-0 Requisiti Gli ammortizzatori della serie 4-1621- * -0 sono dispositivi studiati per convertire in energia termica l energia cinetica generata da organi meccanici
Cuscinetti a strisciamento e a rotolamento
 Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
Indice I vettori Geometria delle masse
 Indice 1 I vettori 1 1.1 Vettori: definizioni................................ 1 1.2 Componenti scalare e vettoriale di un vettore secondo una retta orientata. 2 1.3 Operazioni di somma, differenza tra
Indice 1 I vettori 1 1.1 Vettori: definizioni................................ 1 1.2 Componenti scalare e vettoriale di un vettore secondo una retta orientata. 2 1.3 Operazioni di somma, differenza tra
Sommario Introduzione Il progetto motoruota Obiettivi della tesi Layout meccanico del sistema.3
 Sommario _ Capitolo 1 Analisi preliminare 1.1. Introduzione.1 1.1.1. Il progetto motoruota 1 1.1.2. Obiettivi della tesi 2 1.2. Layout meccanico del sistema.3 1.2.1. Trasmissione ad asse cavo...3 1.2.2.
Sommario _ Capitolo 1 Analisi preliminare 1.1. Introduzione.1 1.1.1. Il progetto motoruota 1 1.1.2. Obiettivi della tesi 2 1.2. Layout meccanico del sistema.3 1.2.1. Trasmissione ad asse cavo...3 1.2.2.
Istituto Istruzione Superiore G. Boris Giuliano" Via Carducci, Piazza Armerina (En)
") Istituto Istruzione Superiore G. Boris Giuliano" Via Carducci, 13-94015 Piazza Armerina (En) Corso di Tecnologie Meccaniche e Applicazioni Anno scolastico 2015-2016 Docente: Cuscinetti volventi Cuscinetti
Istituto Istruzione Superiore G. Boris Giuliano" Via Carducci, 13-94015 Piazza Armerina (En) Corso di Tecnologie Meccaniche e Applicazioni Anno scolastico 2015-2016 Docente: Cuscinetti volventi Cuscinetti
Istituto d Istruzione Secondaria Superiore Carlo Emilio Gadda
 Istituto d Istruzione Secondaria Superiore Carlo Emilio Gadda Presidenza e Segreteria: v. Nazionale 6 43045 Fornovo di Taro (PR) Tel. 0525 400229 Fax 0525 39300 E-mail: pris00800p@istruzione.it Sito web:
Istituto d Istruzione Secondaria Superiore Carlo Emilio Gadda Presidenza e Segreteria: v. Nazionale 6 43045 Fornovo di Taro (PR) Tel. 0525 400229 Fax 0525 39300 E-mail: pris00800p@istruzione.it Sito web:
2
 1 2 3 4 5 6 7 Esempi di atto di moto rotatorio Consideriamo un disco che ruota attorno al centro fisso. Sia R il raggio del disco e P il punto generico della periferia. j v P v = wl(p-) = f kl(p-) P i
1 2 3 4 5 6 7 Esempi di atto di moto rotatorio Consideriamo un disco che ruota attorno al centro fisso. Sia R il raggio del disco e P il punto generico della periferia. j v P v = wl(p-) = f kl(p-) P i
RELAZIONE DI FINE TIROCINIO
 FACOLTA DI INGEGNERIA CIVILE Corso di Laurea Magistrale in Ingegneria Civile per la protezione dai rischi naturali. Anno Accademico 2016/2017 RELAZIONE DI FINE TIROCINIO Realizzazione di un modello agli
FACOLTA DI INGEGNERIA CIVILE Corso di Laurea Magistrale in Ingegneria Civile per la protezione dai rischi naturali. Anno Accademico 2016/2017 RELAZIONE DI FINE TIROCINIO Realizzazione di un modello agli
Attrezzi ad asta di spinta a corsa variabile
 4.1 Attrezzi ad asta a corsa variabile Serie FO Sistema di fissaggio: ortogonale a piede Tipo di realizzazione: Impugnatura a crociera o leva manuale (azionamento con una sola mano) Leva di fissaggio e
4.1 Attrezzi ad asta a corsa variabile Serie FO Sistema di fissaggio: ortogonale a piede Tipo di realizzazione: Impugnatura a crociera o leva manuale (azionamento con una sola mano) Leva di fissaggio e
ESAME DI STATO 2008/09 INDIRIZZO MECCANICA TEMA DI : DISEGNO, PROGETTAZIONE, ORGANIZZAZIONE INDUSTRIALE
 ESAME DI STATO 2008/09 INDIRIZZO MECCANICA TEMA DI : DISEGNO, PROGETTAZIONE, ORGANIZZAZIONE INDUSTRIALE Verifica di stabilità dell albero L albero rappresentato nell allegato può essere assimilato ad una
ESAME DI STATO 2008/09 INDIRIZZO MECCANICA TEMA DI : DISEGNO, PROGETTAZIONE, ORGANIZZAZIONE INDUSTRIALE Verifica di stabilità dell albero L albero rappresentato nell allegato può essere assimilato ad una
ACCOPPIAMENTI ALBERO - MOZZO
 1 CCOPPIMENTI LBERO - ccoppiare due o più elementi di un qualsiasi complessivo, significa predisporre dei collegamenti in modo da renderli, in qualche maniera, solidali. Ciò si realizza introducendo dei
1 CCOPPIMENTI LBERO - ccoppiare due o più elementi di un qualsiasi complessivo, significa predisporre dei collegamenti in modo da renderli, in qualche maniera, solidali. Ciò si realizza introducendo dei
Esercizio 1 L/3. mg CM Mg. La sommatoria delle forze e dei momenti deve essere uguale a 0 M A. ω è il verso di rotazione con cui studio il sistema
 Esercizio 1 Una trave omogenea di lunghezza L e di massa M è appoggiata in posizione orizzontale su due fulcri lisci posti alle sue estremità. Una massa m è appoggiata sulla trave ad una distanza L/3 da
Esercizio 1 Una trave omogenea di lunghezza L e di massa M è appoggiata in posizione orizzontale su due fulcri lisci posti alle sue estremità. Una massa m è appoggiata sulla trave ad una distanza L/3 da
Equilibrio di un punto materiale su un piano
 1 Equilirio di un punto materiale su un piano no inclinato Se un corpo si trova su un piano inclinato, possiamo scomporre il suo peso in due componenti: una parallela al piano, l'altra perpendicolare.
1 Equilirio di un punto materiale su un piano no inclinato Se un corpo si trova su un piano inclinato, possiamo scomporre il suo peso in due componenti: una parallela al piano, l'altra perpendicolare.
Introduzione alla meccanica strutturale
 Claudia Comi Leone Corradi Dell'Acqua Introduzione alla meccanica strutturale '.E McGraw-Hill web site IUAV - VENEZIA I 4688 BIBLIOTECA CENTRALE ~f r irg8t!! Claudia Comi Leone Corradi Dell'Acqua Introduzione
Claudia Comi Leone Corradi Dell'Acqua Introduzione alla meccanica strutturale '.E McGraw-Hill web site IUAV - VENEZIA I 4688 BIBLIOTECA CENTRALE ~f r irg8t!! Claudia Comi Leone Corradi Dell'Acqua Introduzione
Corso di Laurea in Ingegneria Civile Questionario di Fisica Generale A
 Corso di Laurea in Ingegneria Civile Questionario di Fisica Generale A I vettori 1) Cosa si intende per grandezza scalare e per grandezza vettoriale? 2) Somma graficamente due vettori A, B. 3) Come è definito
Corso di Laurea in Ingegneria Civile Questionario di Fisica Generale A I vettori 1) Cosa si intende per grandezza scalare e per grandezza vettoriale? 2) Somma graficamente due vettori A, B. 3) Come è definito
Le viti possono essere
 VITI DI COLLEGAMENTO (filettatura metrica ISO) Le viti di collegamento sono costituite da due parti: lo stelo, che può essere totalmente o parzialmente filettato; la testa che può assumere forme varie.
VITI DI COLLEGAMENTO (filettatura metrica ISO) Le viti di collegamento sono costituite da due parti: lo stelo, che può essere totalmente o parzialmente filettato; la testa che può assumere forme varie.
Cablaggio della barra Previsione teorica del comportamento della barra Misure del segnale sotto flessione e sotto trazione Analisi dei risultati
 Laboratorio di misure Applicazioni del ponte di Wheatstone Barra di torsione Scopo Compiti Prerequisiti Riferimenti Utilizzare il ponte di Wheatstone per misurare la torsione di una barra Verificare l'insensibilità
Laboratorio di misure Applicazioni del ponte di Wheatstone Barra di torsione Scopo Compiti Prerequisiti Riferimenti Utilizzare il ponte di Wheatstone per misurare la torsione di una barra Verificare l'insensibilità
LEZIONE 1. IL PROGETTO STRUTTURALE Parte 2. La modellazione. Corso di TECNICA DELLE COSTRUZIONI Chiara CALDERINI A.A
 Corso di TECNICA DELLE COSTRUZIONI Chiara CALDERINI A.A. 2007-2008 Facoltà di Architettura Università degli Studi di Genova LEZIONE 1 IL PROGETTO STRUTTURALE Parte 2. La modellazione LA MODELLAZIONE INPUT
Corso di TECNICA DELLE COSTRUZIONI Chiara CALDERINI A.A. 2007-2008 Facoltà di Architettura Università degli Studi di Genova LEZIONE 1 IL PROGETTO STRUTTURALE Parte 2. La modellazione LA MODELLAZIONE INPUT
ESAME DI STATO 2014/2015 INDIRIZZO ITMM MECCANICA MECCATRONICA ED ENERGIA TEMA DI : DISEGNO, PROGETTAZIONE E ORGANIZZAZIONE INDUSTRIALE
 ESAME DI STATO 2014/2015 INDIRIZZO ITMM MECCANICA MECCATRONICA ED ENERGIA Prima parte TEMA DI : DISEGNO, PROGETTAZIONE E ORGANIZZAZIONE INDUSTRIALE A) Dimensionamento dell albero L albero rappresentato
ESAME DI STATO 2014/2015 INDIRIZZO ITMM MECCANICA MECCATRONICA ED ENERGIA Prima parte TEMA DI : DISEGNO, PROGETTAZIONE E ORGANIZZAZIONE INDUSTRIALE A) Dimensionamento dell albero L albero rappresentato
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria
 UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello DM 509/99 e DM 270/04 e Diploma Universitario)
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello DM 509/99 e DM 270/04 e Diploma Universitario)
2 - Principi di Meccanica e di Equilibrio
 2 - Principi di Meccanica e di Equilibrio Cause dei fenomeni meccanici (quiete e moto) 1/2 Nella Meccanica Classica (Meccanica Newtoniana) si assume che tra corpi diversi, così come tra le diverse parti
2 - Principi di Meccanica e di Equilibrio Cause dei fenomeni meccanici (quiete e moto) 1/2 Nella Meccanica Classica (Meccanica Newtoniana) si assume che tra corpi diversi, così come tra le diverse parti
L EQUILIBRIO DEL PUNTO MATERIALE
 1 L EQUILIBRIO DEL PUNTO MATERIALE La statica studia l equilibrio dei corpi. Un corpo è in equilibrio se è fermo e persevera nel suo stato di quiete al trascorrere del tempo. Un modello è la semplificazione
1 L EQUILIBRIO DEL PUNTO MATERIALE La statica studia l equilibrio dei corpi. Un corpo è in equilibrio se è fermo e persevera nel suo stato di quiete al trascorrere del tempo. Un modello è la semplificazione
CALETTATORI DI BLOCCAGGIO PER ATTRITO
 PER ATTRITO Il sistema di bloccaggio tramite calettamento per attrito rende solidale all albero uno o più organi che permettono di trasmettere il moto o sopportare una spinta assiale. L accoppiamento per
PER ATTRITO Il sistema di bloccaggio tramite calettamento per attrito rende solidale all albero uno o più organi che permettono di trasmettere il moto o sopportare una spinta assiale. L accoppiamento per
CARATTERISTICHE. * I carichi radiali sono calcolati sulla mezzeria dell albero.
 CARATTERISTICHE Lo Zero-Max è un variatore meccanico positivo funzionante a bagno d olio costruito sul principio della trasmissione del moto attraverso eccentrici e ruote libere collegati fra loro da aste
CARATTERISTICHE Lo Zero-Max è un variatore meccanico positivo funzionante a bagno d olio costruito sul principio della trasmissione del moto attraverso eccentrici e ruote libere collegati fra loro da aste
TECNOLOGIA DELL ARCHITETTURA 2009/10 PROF. SERGIO RINALDI
 SISTEMI STRUTTURALI PRINCIPALI NELLA STORIA DELL ARCHITETTURA Esiste una stretta relazione tra il sistema strutturale e i materiali scelti per la costruzione sistema a telaio sistema trilitico sistema
SISTEMI STRUTTURALI PRINCIPALI NELLA STORIA DELL ARCHITETTURA Esiste una stretta relazione tra il sistema strutturale e i materiali scelti per la costruzione sistema a telaio sistema trilitico sistema
ESERCIZIO 1 (Punti 9)
") UNIVERSITA DI PISA - ANNO ACCADEMICO 007-8 CORSO DI LAUREA IN ING. ELETTRICA (N.O.) CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE VERIFICA INTERMEDIA DEL 15-06-009 ESERCIZIO 1 (Punti 9) Data
UNIVERSITA DI PISA - ANNO ACCADEMICO 007-8 CORSO DI LAUREA IN ING. ELETTRICA (N.O.) CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE VERIFICA INTERMEDIA DEL 15-06-009 ESERCIZIO 1 (Punti 9) Data
1.6. Momenti di forze parallele rispetto a un asse. Ricerca grafica e analitica 16
 Prefazione Avvertenze 1 Elementi di teoria dei vettori...i I.1. Generalità...I 1.2. Composizione delle forze...2 Risultante di forze aventi la stessa retta d'applicazione 3 Risultante di forze concorrenti
Prefazione Avvertenze 1 Elementi di teoria dei vettori...i I.1. Generalità...I 1.2. Composizione delle forze...2 Risultante di forze aventi la stessa retta d'applicazione 3 Risultante di forze concorrenti
ARGOMENTI DELLA LEZIONE Collegamenti Albero-Mozzo Definizioni Applicazioni
 ARGOMENTI DELLA LEZIONE Collegamenti Albero-Mozzo Definizioni Applicazioni Introduzione L unione di parti meccaniche mediante elementi che possano essere rimossi in caso di necessità senza alterazioni
ARGOMENTI DELLA LEZIONE Collegamenti Albero-Mozzo Definizioni Applicazioni Introduzione L unione di parti meccaniche mediante elementi che possano essere rimossi in caso di necessità senza alterazioni
Modulo B Unità 2 L'equilibrio dei sistemi rigidi. Equilibrio di un punto materiale
 1 Equilirio di un punto materiale Per punto materiale intendiamo un qualsiasi corpo dotato di massa le cui dimensioni sono trascuraili rispetto a quelle dello spazio circostante. Il corpo rigido è un oggetto
1 Equilirio di un punto materiale Per punto materiale intendiamo un qualsiasi corpo dotato di massa le cui dimensioni sono trascuraili rispetto a quelle dello spazio circostante. Il corpo rigido è un oggetto
Organi meccanici per la trasmissione del moto
 Organi meccanici per la trasmissione del moto La trasmissione del moto fra due organi meccanici ha lo scopo di trasportare e/o trasformare il movimento e con esso le forze che lo generano. In una trasmissione
Organi meccanici per la trasmissione del moto La trasmissione del moto fra due organi meccanici ha lo scopo di trasportare e/o trasformare il movimento e con esso le forze che lo generano. In una trasmissione
TLY MODULI LINEARI MOTORIZZABILI
 TLY MODULI LINEARI MOTORIZZABILI La famiglia di prodotti TLY è stata progettata ricercando elevate prestazioni, qualità e semplicità costruttiva. Vengono utilizzati estrusi in alluminio autoportanti su
TLY MODULI LINEARI MOTORIZZABILI La famiglia di prodotti TLY è stata progettata ricercando elevate prestazioni, qualità e semplicità costruttiva. Vengono utilizzati estrusi in alluminio autoportanti su
MECCANICA APPLICATA ALLE MACCHINE L
 Università degli Studi di Bologna II Facoltà di Ingegneria con sede a Cesena MECCANICA ALICATA ALLE MACCHINE L Corso di Laurea in INGEGNEIA MECCANICA Corso di Laurea in INGEGNEIA AEOSAZIALE Anno Accademico
Università degli Studi di Bologna II Facoltà di Ingegneria con sede a Cesena MECCANICA ALICATA ALLE MACCHINE L Corso di Laurea in INGEGNEIA MECCANICA Corso di Laurea in INGEGNEIA AEOSAZIALE Anno Accademico
EQUILIBRIO DI UN PUNTO MATERIALE, DI UN SITEMA DI PUNTI EDIUNCORPORIGIDO
 EQUILIBRIO DI UN PUNTO MATERIALE, DI UN SITEMA DI PUNTI EDIUNCORPORIGIDO Equilibrio di un Punto Materiale Definizione 1 Un punto materiale è in una posizione di equilibrio quando posto in quella posizione
EQUILIBRIO DI UN PUNTO MATERIALE, DI UN SITEMA DI PUNTI EDIUNCORPORIGIDO Equilibrio di un Punto Materiale Definizione 1 Un punto materiale è in una posizione di equilibrio quando posto in quella posizione
Indice Materiali Parte 1 Fondamenti Introduzione
 Indice Prefazione Ringraziamenti dell Editore Simboli Guida alla lettura XIII XV XVII XXI Parte 1 Fondamenti 1 1 Introduzione 1 1-1 Il progetto 2 1-2 La progettazione meccanica 3 1-3 Fasi e interazioni
Indice Prefazione Ringraziamenti dell Editore Simboli Guida alla lettura XIII XV XVII XXI Parte 1 Fondamenti 1 1 Introduzione 1 1-1 Il progetto 2 1-2 La progettazione meccanica 3 1-3 Fasi e interazioni
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE
 UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE 10 Gennaio 2014 ESAME DI MECCANICA solo PRIMA PARTE versione A Corso di Laurea in Ingegneria Biomedica Esercizio 1 Nel meccanismo in figura,
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE 10 Gennaio 2014 ESAME DI MECCANICA solo PRIMA PARTE versione A Corso di Laurea in Ingegneria Biomedica Esercizio 1 Nel meccanismo in figura,
Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura. Fondamenti di Costruzioni Meccaniche Tensione e deformazione Carico assiale
 Esercizio N.1 Un asta di acciaio è lunga 2.2 m e non può allungarsi più di 1.2 mm quando le si applica un carico di 8.5 kn. Sapendo che E = 200 GPa, determinare: (a) il più piccolo diametro dell asta che
Esercizio N.1 Un asta di acciaio è lunga 2.2 m e non può allungarsi più di 1.2 mm quando le si applica un carico di 8.5 kn. Sapendo che E = 200 GPa, determinare: (a) il più piccolo diametro dell asta che
FRENI A TAMBURO E MOZZI RUOTA FT MR 140
 Via M.L. King, 6-41100 MODENA (ITALY) Tel: +39 059 415 711 Fax: +39 059 415 729 / 059 415 730 INTERNET: http://www.hansatmp.it E-MAIL: hansatmp@hansatmp.it HYDRAULIC COMPONENTS HYDROSTATIC TRANSMISSIONS
Via M.L. King, 6-41100 MODENA (ITALY) Tel: +39 059 415 711 Fax: +39 059 415 729 / 059 415 730 INTERNET: http://www.hansatmp.it E-MAIL: hansatmp@hansatmp.it HYDRAULIC COMPONENTS HYDROSTATIC TRANSMISSIONS
Robotica industriale. Richiami di statica del corpo rigido. Prof. Paolo Rocco
 Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
La Statica. La statica è una parte della meccanica che studia l equilibrio dei corpi. Prof Giovanni Ianne
 La Statica La statica è una parte della meccanica che studia l equilibrio dei corpi. Sistemi rigidi ed equilibrio Un corpo è in equilibrio quando è fermo e continua a restare fermo. Il punto materiale
La Statica La statica è una parte della meccanica che studia l equilibrio dei corpi. Sistemi rigidi ed equilibrio Un corpo è in equilibrio quando è fermo e continua a restare fermo. Il punto materiale
Collegamenti filettati
 Collegamenti filettati Carmine Napoli Si possono dividere i collegamenti filettati in due tipologie: 1. di serraggio (collegamento forzato tra due elementi) 2. viti di manovra ( tornio movimento torretta)
Collegamenti filettati Carmine Napoli Si possono dividere i collegamenti filettati in due tipologie: 1. di serraggio (collegamento forzato tra due elementi) 2. viti di manovra ( tornio movimento torretta)
Il ciclo di lavorazione. Industrializzazione prodotto
 Il ciclo di lavorazione Il ciclo di lavorazione definizioni FASE: insieme ordinato di operazioni realizzate presso il medesimo posto di lavoro con o senza lo smontaggio e riposizionamento del pezzo SOTTO-FASE:
Il ciclo di lavorazione Il ciclo di lavorazione definizioni FASE: insieme ordinato di operazioni realizzate presso il medesimo posto di lavoro con o senza lo smontaggio e riposizionamento del pezzo SOTTO-FASE:
Formulario Tecnologia Meccanica
 Formulario Tecnologia Meccanica Marcello Miccio U n i S A 1 4 / 0 7 / 0 1 0 Relazioni Meccanismo Formazione del Truciolo. - Rapporto di taglio: - Fattore di ricalcamento: - Spessore di taglio: sin - Spessore
Formulario Tecnologia Meccanica Marcello Miccio U n i S A 1 4 / 0 7 / 0 1 0 Relazioni Meccanismo Formazione del Truciolo. - Rapporto di taglio: - Fattore di ricalcamento: - Spessore di taglio: sin - Spessore
Reazioni vincolari e equilibrio del corpo rigido. M. Guagliano
 Reazioni vincolari e equilibrio del corpo rigido Reazioni vincolari del corpo rigido 2 I corpi rigidi sono generalmente vincolati al riferimento fisso tramite i vincoli, che esercitano delle forze sul
Reazioni vincolari e equilibrio del corpo rigido Reazioni vincolari del corpo rigido 2 I corpi rigidi sono generalmente vincolati al riferimento fisso tramite i vincoli, che esercitano delle forze sul
Università degi studi di Bergamo Dipartimento di Ingegneria e Scienze Applicate
 Università degi studi di Bergamo Dipartimento di Ingegneria e Scienze Applicate Progettazione Funzionale di Sistemi Meccanici e Meccatronici 2015-2016 Prof. Paolo Righettini Progetto camma a Bilanciere
Università degi studi di Bergamo Dipartimento di Ingegneria e Scienze Applicate Progettazione Funzionale di Sistemi Meccanici e Meccatronici 2015-2016 Prof. Paolo Righettini Progetto camma a Bilanciere
REGISTRO DELLE LEZIONI 2006/2007. Tipologia. Addì Tipologia. Addì Tipologia
 Introduzione ai contenuti del corso. Descrizione dell'organizzazione del corso e delle modalità di svolgimento delle lezioni e degli esami. Teoria lineare della trave. Ipotesi di base. Problema assiale:
Introduzione ai contenuti del corso. Descrizione dell'organizzazione del corso e delle modalità di svolgimento delle lezioni e degli esami. Teoria lineare della trave. Ipotesi di base. Problema assiale:
4 SOLLECITAZIONI INDOTTE. 4.1 Generalità
 4 SOLLECITAZIONI INDOTTE 4.1 Generalità Le azioni viste inducono uno stato pensionale interno alla struttura e all edificio che dipende dalla modalità con cui le azioni si esplicano. Le sollecitazioni
4 SOLLECITAZIONI INDOTTE 4.1 Generalità Le azioni viste inducono uno stato pensionale interno alla struttura e all edificio che dipende dalla modalità con cui le azioni si esplicano. Le sollecitazioni
DISEGNO TECNICO INDUSTRIALE. Lezione Trasmissioni meccaniche
 UNIVERSITÀ DI LECCE Corso di Laurea in Ingegneria Meccanica, Gestionale e dei Materiali DISEGNO TECNICO INDUSTRIALE Lezione Trasmissioni meccaniche 1 Argomenti della lezione Trasmissioni del moto rotatorio
UNIVERSITÀ DI LECCE Corso di Laurea in Ingegneria Meccanica, Gestionale e dei Materiali DISEGNO TECNICO INDUSTRIALE Lezione Trasmissioni meccaniche 1 Argomenti della lezione Trasmissioni del moto rotatorio
Lezione 2 - I vincoli
 Lezione 2 - I vincoli ü [.a. 2011-2012 : ultima revisione 29 settembre 2012] Proseguendo nello studio della cinematica del corpo rigido, si vuole fornire in questa lezione una classificazione dei possibili
Lezione 2 - I vincoli ü [.a. 2011-2012 : ultima revisione 29 settembre 2012] Proseguendo nello studio della cinematica del corpo rigido, si vuole fornire in questa lezione una classificazione dei possibili
Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo tra di loro;
 (pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
(pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
ELEMENTI ELASTICI MODULARI ROSTA GAMMA DEI PRODOTTI
 GAMMA DEI PRODOTTI Tipo DR-S: elementi elastici modulari Rosta in gomma Corpo esterno e tubo interno a sezione quadrata in acciaio. Atti al fissaggio, su uno o entrambi i lati, di leve dotate di un profilato
GAMMA DEI PRODOTTI Tipo DR-S: elementi elastici modulari Rosta in gomma Corpo esterno e tubo interno a sezione quadrata in acciaio. Atti al fissaggio, su uno o entrambi i lati, di leve dotate di un profilato
GENOVA SOPPORTI IN ACCIAIO FUSO
 GENOVA SOPPORTI IN ACCIAIO FUSO 003 SOPPORTI IN ACCIAIO FUSO DI QUALITA La BIERREDI si augura che questo catalogo possa risultare di facile e pratica consultazione, il nostro intento è stato quello di
GENOVA SOPPORTI IN ACCIAIO FUSO 003 SOPPORTI IN ACCIAIO FUSO DI QUALITA La BIERREDI si augura che questo catalogo possa risultare di facile e pratica consultazione, il nostro intento è stato quello di
INGRANAGGI CILINDRICI e CREMAGLIERE
 INGRANAGGI CILINDRICI e CREMAGLIERE INGRANAGGI CILINDRICI CON MOZZO LATERALE pag. 4 INGRANAGGI CILINDRICI SENZA MOZZO LATERALE 7 CREMAGLIERE 1 INGRANAGGI CILINDRICI E CREMAGLIERE INGRANAGGI CILINDRICI
INGRANAGGI CILINDRICI e CREMAGLIERE INGRANAGGI CILINDRICI CON MOZZO LATERALE pag. 4 INGRANAGGI CILINDRICI SENZA MOZZO LATERALE 7 CREMAGLIERE 1 INGRANAGGI CILINDRICI E CREMAGLIERE INGRANAGGI CILINDRICI
PIANO DI LAVORO ANNUALE
 ISTITUTO ISTRUZIONE SUPERIORE A. MORO RIVAROLO PIANO DI LAVORO ANNUALE DOCENTI : ANZALONE Giuseppe MEOTTO Roberto Materia d insegnamento: Meccanica Applicata e Macchine a fluido CLASSE 4^ SEZ. BME MECCANICA
ISTITUTO ISTRUZIONE SUPERIORE A. MORO RIVAROLO PIANO DI LAVORO ANNUALE DOCENTI : ANZALONE Giuseppe MEOTTO Roberto Materia d insegnamento: Meccanica Applicata e Macchine a fluido CLASSE 4^ SEZ. BME MECCANICA
BONIFICA ACUSTICA: ATTRITO E INERZIA. Bonifica acustica_moduloj3_rev_3_10_03
 BONIFICA ACUSTICA: ATTRITO E INERZIA Il movimento relativo fra due componenti meccanici a contatto determina fenomeni di attrito cui è associata un emissione sonora. Fra gli esempi più significativi di
BONIFICA ACUSTICA: ATTRITO E INERZIA Il movimento relativo fra due componenti meccanici a contatto determina fenomeni di attrito cui è associata un emissione sonora. Fra gli esempi più significativi di
Lezione 4 acciaio: L acciaio da costruzione i collegamenti fra elementi
 Temec Acciaio Lezione 4 acciaio: L acciaio da costruzione i collegamenti fra elementi Prof. Maria Chiara Torricelli Università di Firenze Collegamenti per chiodatura, bullonatura, saldatura 03/12/2015
Temec Acciaio Lezione 4 acciaio: L acciaio da costruzione i collegamenti fra elementi Prof. Maria Chiara Torricelli Università di Firenze Collegamenti per chiodatura, bullonatura, saldatura 03/12/2015
Elementi Costruttivi delle Macchine. Soluzione - Verifica di un albero di trasmissione 3.1. Politecnico di Torino CeTeM
 Si richiede la verifica di un albero di che riceve il moto da una ruota dentata calettata sull albero stesso il quale trasmette moto alternato a una puleggia. 40 50 20 20 R.5 R.1 R.5 R.2 R.1 Ø65 Ø46 Ø41
Si richiede la verifica di un albero di che riceve il moto da una ruota dentata calettata sull albero stesso il quale trasmette moto alternato a una puleggia. 40 50 20 20 R.5 R.1 R.5 R.2 R.1 Ø65 Ø46 Ø41