Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
|
|
|
- Raffaella Mancini
- 6 anni fa
- Visualizzazioni
Transcript

1 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica
2 Sommario - 1! esperimenti con un sensore di forza/coppia su robot! finora, una tesi sulla calibrazione del sensore ATI Mini45! controllo del contatto e regolazione di forza! esplorazione/identificazione di contorni mediante sensore! slides 4-10! prove con e uso di attuatori a cedevolezza variabile! controllo simultaneo di rigidezza e posizione con un Qbmove!...anche in simulazione (Simulink/Matlab)! assemblaggio di due Qbmove in una struttura articolata (robot)! controllo coordinato di più gradi di libertà! slides Laboratorio di Automatica
3 Sommario - 2! controllo a tempo minimo di robot su cammino assegnato! trattazione cinematica con comandi limitati in accelerazione! con o senza vincoli di velocità dei giunti! nello spazio dei giunti o nello spazio cartesiano! robot 2R planare o 3R spaziale! slides appunti manoscritti! supervisione guidata da eventi di controllori a tempo continuo per robot! automa o rete di Petri guidata da eventi (e dallo stato del robot) per lo switch tra fasi/strategie di controllo per compiti complessi! stabilizzazione a configurazione di un robot 2R sotto-attuato! scelta delle priorità dei compiti simultanei per un robot ridondante! slides (con articoli scientifici a parte) Laboratorio di Automatica
! serie ATI!")

4 Sensore 6D di forza/coppia (F/T)! serie ATI! costo: circa 5 K! per il modello Mini45 Laboratorio di Automatica

 flangia di montaggio (sull ultimo asse del manipolatore)")
5 Sensore 6D di forza/coppia + robot! unità elettronica di filtraggio segnali e relative elaborazioni! montaggio al polso di un robot manipolatore terna di misura (solidale al sensore) flangia di montaggio (sull ultimo asse del manipolatore) Laboratorio di Automatica


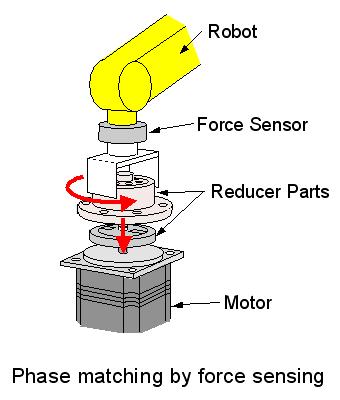
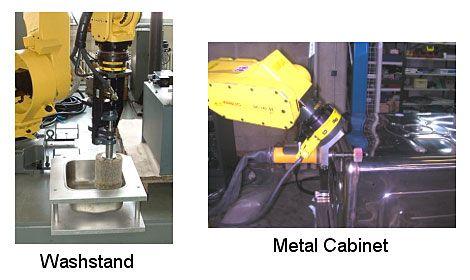
6 Usi tipici di un sensore F/T in ambito industriale Laboratorio di Automatica

7 Assemblaggio con sensore F/T robot ABB con sensore F/T ATI video Laboratorio di Automatica
 video MovingPlate2.mp4, materiale del corso Robotics 1: 05_Rob1_Video.zip Laboratorio di Automatica 25.2.2016 8")
8 Controllo combinato con uso di sensori di visione e forza robot KUKA LWR con telecamera e sensore F/T IEEE ICRA 07, Roma) video MovingPlate2.mp4, materiale del corso Robotics 1: 05_Rob1_Video.zip Laboratorio di Automatica

 % ' & segnali in uscita agli estensimetri (ponti di Wheatstone) Laboratorio di Automatica 25")
9 Calibrazione di un sensore F/T s f x s µ x " $ $ $ $ $ $ # $ s f x s f y s f z s µ x s µ y s µ z % ' ' ' ' ' ' & ' s f y s µ y s µ z s f z forze/coppie misurate nella terna solidale al sensore matrice di calibrazione " $ # c f c c µ c % ' = & " c R s O %" $ # S( c r cs ) c R c ' $ s R s &# s f s s µ s trasformazione delle misure dalla terna del sensore ad una di utente (carico/contatto) % ' & segnali in uscita agli estensimetri (ponti di Wheatstone) Laboratorio di Automatica


10 Sensore ATI Mini45 e KUKA LWR c/o Laboratorio di Robotica DIAG Laboratorio di Automatica


!")


11 Attuatore a cedevolezza variabile! attuatore Qbmove! prototipo Variable Stiffness Actuator (VSA) da spin-off dell Università di Pisa! due motori per il controllo simultaneo di movimento e cedevolezza (1/rigidezza)! basso costo e compatto! progetto open source HW/SW! modulare e componibile! modello dinamico e simulatore puleggia di uscita a cui applicare un carico movimentazione di un braccio interfacce standard di comunicazione e alimentazione Matlab Simulink Laboratorio di Automatica



12 Attuatore a cedevolezza variabile schema di principio: agonista-antagonista trasmissione elastica non lineare Laboratorio di Automatica
13 Attuatore a cedevolezza variabile Prima modalità: - riferimento variabile per la posizione - riferimento costante per la rigidezza Seconda modalità: - riferimento sinusoidale per la rigidezza - riferimento costante per la posizione Laboratorio di Automatica
14 Attuatore a cedevolezza variabile Esperimenti: riferimento variabile per la posizione, costante per la rigidezza controllore PID controllore PID + feedforward Laboratorio di Automatica
15 Attuatore a cedevolezza variabile Esperimenti: riferimento sinusoidale per la rigidezza, costante per la posizione controllore PID controllore PID + feedforward Laboratorio di Automatica



16 Robot con Qbmove combinati 3 video Università di Pisa: anche altri in playlist VSA CubeBot Laboratorio di Automatica
 video")
17 Controllo cinematico a tempo minimo di robot: punto-punto (PTP) e su cammino video moto da fermo a fermo tra configurazione iniziale e finale dei giunti moto su cammino cartesiano assegnato (qui lineare a tratti) video Laboratorio di Automatica
18 Controllo cinematico a tempo minimo di robot su cammino assegnato vedi pdf allegato con appunti manoscritti (11 pagine) su diverse possibili formulazioni di problemi di controllo ottimo di questo tipo Laboratorio di Automatica
 con vincoli di coppia ai motori video")
 a minima energia totale con vincoli di coppia ai motori materiali del corso")
19 Controllo dinamico di robot: a tempo minimo e a minima energia sono problemi più complessi, con dinamica, adatti per la laurea magistrale in Control Engineering moto PTP (Point-To-Point) con vincoli di coppia ai motori video Manutec_PTP_MinTime.mpg video Manutec_PTP_MinEnergy.mpg moto PTP (Point-To-Point) a minima energia totale con vincoli di coppia ai motori materiali del corso Robotics 2: 05_Rob2_Videos.zip Laboratorio di Automatica


!")

!")

20 Supervisore nel controllo di robot codifica della prossima legge istanti temporali di switch + riferimenti (obiettivi) Controllore (switched) Supervisore strategia/fase 1 strategia/fase 2... strategia/fase m stato/eventi Robot uscite (prestazioni)! esempi di supervisori basati su eventi! decide le transizioni da una fase di controllo alla successiva in base all errore e a condizioni di contrazione (controllo di robot sotto-attuati)! sceglie una tra più strategie di controllo in base allo stato del robot e agli obiettivi (controllo di robot ridondanti per task multipli con priorità) Laboratorio di Automatica



21 Controllo di robot sotto-attuati 2R planare con 1 solo motore alla base controllo molto difficile! 3R planare con 2 motori (il terzo giunto è passivo) relativamente più semplice... 3 video AIST Tsukuba: vedi si pianifica e si controlla il moto del centro di percussione del terzo braccio Laboratorio di Automatica
22 Controllo di robot sotto-attuati schema iterativo per contrazioni successive 2R con 1 solo motore alla base, in moto su un piano orizzontale Laboratorio di Automatica

23 Controllo di robot ridondanti c/o Laboratorio di Robotica DIAG 8 video nella playlist Kinematic control of redundant robots Laboratorio di Automatica
24
25
26
27
28
29
30
31
32
33
34
Cinematica differenziale inversa Statica
 Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Rilevazione e isolamento
 Corso di Robotica 2 Rilevazione e isolamento I) di guasti degli attuatori II) di collisioni ambientali (con reazione) Prof. Alessandro De Luca A. De Luca Diagnosi dei guasti ( faults ) nella diagnosi dei
Corso di Robotica 2 Rilevazione e isolamento I) di guasti degli attuatori II) di collisioni ambientali (con reazione) Prof. Alessandro De Luca A. De Luca Diagnosi dei guasti ( faults ) nella diagnosi dei
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Informazioni e Programma
 Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Progetto e Realizzazione di un Robot a Cinematica Parallela per Applicazioni Mediche
 Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
Complementi di Controlli Automatici. Introduzione al corso
 Università di Roma Tre Complementi di Controlli Automatici Introduzione al corso Prof. Giuseppe Oriolo DIS, Università di Roma La Sapienza Organizzazione del corso le lezioni saranno tenute in parte da
Università di Roma Tre Complementi di Controlli Automatici Introduzione al corso Prof. Giuseppe Oriolo DIS, Università di Roma La Sapienza Organizzazione del corso le lezioni saranno tenute in parte da
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo nello spazio cartesiano
 Corso di Robotica 2 Controllo nello spazio cartesiano Prof. Alessandro De Luca A. De Luca Controllo di posizione cartesiana PD+ per problemi di regolazione robot proporzionale all errore cartesiano/derivativo
Corso di Robotica 2 Controllo nello spazio cartesiano Prof. Alessandro De Luca A. De Luca Controllo di posizione cartesiana PD+ per problemi di regolazione robot proporzionale all errore cartesiano/derivativo
Modello dinamico dei robot: approccio di Newton-Eulero
 Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
Robot Mobili su Ruote Generalità e Cinematica
 Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Introduzione. Alessandro De Luca. Automazione
 Introduzione Alessandro De Luca obiettivi! Panoramica su architetture e metodi di controllo e supervisione per il funzionamento di macchine, apparati fisici e processi! che evolvono nel tempo o in base
Introduzione Alessandro De Luca obiettivi! Panoramica su architetture e metodi di controllo e supervisione per il funzionamento di macchine, apparati fisici e processi! che evolvono nel tempo o in base
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
 Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Corso di Laurea Specialistica in Informatica Università di Pisa
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Componenti per la robotica: Sistemi di misura e Sensori propriocettivi
 Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Università ità degli Studi di Brescia
 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Automazione Industriale per Applicazioni Speciali Curriculum: Robotica e Automazione Industriale Coordinatore: Prof. Giovanni
XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Automazione Industriale per Applicazioni Speciali Curriculum: Robotica e Automazione Industriale Coordinatore: Prof. Giovanni
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico (ing. M. Troncossi)
") MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
Programmazione KR16. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Programmazione KR16 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Kuka KR C2 : Controllore comandi posizioni & velocità corrente dati 2 Kuka KRC2 : Unità di potenza Calcolatore
Programmazione KR16 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Kuka KR C2 : Controllore comandi posizioni & velocità corrente dati 2 Kuka KRC2 : Unità di potenza Calcolatore
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 10 Macchine utensili e controllo numerico Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 10 Macchine utensili e controllo numerico Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Introduzione
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Il corso Obiettivo: Fornire la preparazione culturale e gli strumenti operativi per la comprensione
Controlli automatici per la meccatronica Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Il corso Obiettivo: Fornire la preparazione culturale e gli strumenti operativi per la comprensione
STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
 Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Corso di Robotica 1 Cinematica inversa
 Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
Un sistema di interazione uomo-robot per compiti di manipolazione mobile basato su realtà virtuale
 Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
Università degli Studi di Cassino Facoltà di Ingegneria
 Facoltà di Ingegneria Corso di Laurea in Modulo di: prof. Giuseppe Tomasso e-mail: tomasso@unicas.it telefono: 0776-2993730 Web: http:// webuser.unicas.it/tomasso Introduzione Modulo di: programma Corso
Facoltà di Ingegneria Corso di Laurea in Modulo di: prof. Giuseppe Tomasso e-mail: tomasso@unicas.it telefono: 0776-2993730 Web: http:// webuser.unicas.it/tomasso Introduzione Modulo di: programma Corso
Prof.ssa Cecilia Laschi
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura
 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
Coreografie con droni e sviluppi tecnologici. Patrick Predella
 Coreografie con droni e sviluppi tecnologici Patrick Predella Il Drone Sistema Aeromobile a Pilotaggio Remoto Sostanzialmente piccolo Leggero Estremamente manovrabile Versatile Le sue capacità Sistemi
Coreografie con droni e sviluppi tecnologici Patrick Predella Il Drone Sistema Aeromobile a Pilotaggio Remoto Sostanzialmente piccolo Leggero Estremamente manovrabile Versatile Le sue capacità Sistemi
Modello dinamico dei robot: approccio Lagrangiano
 Corso di Robotica 2 Modello dinamico dei robot: approccio Lagrangiano Prof. Alessandro De Luca A. De Luca Modello dinamico esprime il legame tra forze generalizzate ut) agenti sul robot movimento del robot
Corso di Robotica 2 Modello dinamico dei robot: approccio Lagrangiano Prof. Alessandro De Luca A. De Luca Modello dinamico esprime il legame tra forze generalizzate ut) agenti sul robot movimento del robot
Pianificazione del moto tra ostacoli
 Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello
Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Ingegneria Automatica Master of Science in Control Engineering
 Laurea Magistrale in Ingegneria Automatica Master of Science in Control Engineering www.diag.uniroma1.it/automatica Presentazione agli studenti di Controlli Automatici BIAR 14 Marzo 2016 Automatica!"#$%,
Laurea Magistrale in Ingegneria Automatica Master of Science in Control Engineering www.diag.uniroma1.it/automatica Presentazione agli studenti di Controlli Automatici BIAR 14 Marzo 2016 Automatica!"#$%,
Controllo cinematico Controllo dinamico di un singolo asse
 Corso di Robotica 1 Controllo cinematico Controllo dinamico di un singolo asse Prof. Alessandro De Luca Robotica 1 1 Controllo del moto si vuole realizzare effettivamente un moto desiderato regolazione
Corso di Robotica 1 Controllo cinematico Controllo dinamico di un singolo asse Prof. Alessandro De Luca Robotica 1 1 Controllo del moto si vuole realizzare effettivamente un moto desiderato regolazione
STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS
 STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS CORSO DI STUDIO IN INGEGNERIA ELETTRONICA LAUREA MAGISTRALE IN BIOINGEGNERIA (LM21) CORSO DI BIOMECCANICA A.A. 2015/16
STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS CORSO DI STUDIO IN INGEGNERIA ELETTRONICA LAUREA MAGISTRALE IN BIOINGEGNERIA (LM21) CORSO DI BIOMECCANICA A.A. 2015/16
SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT
 SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
PIANO DI LAVORO DEI DOCENTI
 Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 5
 Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
KUKA LeichtBau-Roboter LightWeight-Robot
 KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
SISTEMA DI POSIZIONAMENTO MICROMETRICO PER APPLICAZIONI CON FASCI DI PARTICELLE
 UNIVERSITA DEGLI STUDI DI CATANIA FACOLTA DI INGEGNERIA ISTITUTO NAZIONALE DI FISICA NUCLEARE LABORATORI NAZIONALI DEL SUD Corso di Laurea di I livello in Ingegneria Informatica SISTEMA DI POSIZIONAMENTO
UNIVERSITA DEGLI STUDI DI CATANIA FACOLTA DI INGEGNERIA ISTITUTO NAZIONALE DI FISICA NUCLEARE LABORATORI NAZIONALI DEL SUD Corso di Laurea di I livello in Ingegneria Informatica SISTEMA DI POSIZIONAMENTO
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica
 PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
CODESYS Softmotion come gestire un robot
 CODESYS Softmotion come gestire un robot CODESYS Users Conference 2017 Luca Strabla CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Componenti 2 Definizione robot 3 Programmazione 2 Componenti
CODESYS Softmotion come gestire un robot CODESYS Users Conference 2017 Luca Strabla CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Componenti 2 Definizione robot 3 Programmazione 2 Componenti
Motori Motore passo-passo Stadio di potenza PWM Sincrono Stadio di potenza del motore passopasso. Blocchi funzionali. Set point e generatore PWM
 RC1 Blocchi funzionai Motori a corrente continua Generatori Circuiti per il controllo dei motori in CC Motori a corrente alternata Circuiti per il controllo dei motori in CA Motori passo-passo Circuiti
RC1 Blocchi funzionai Motori a corrente continua Generatori Circuiti per il controllo dei motori in CC Motori a corrente alternata Circuiti per il controllo dei motori in CA Motori passo-passo Circuiti
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
L Automatic Control Telelab
 Università di Siena L Marco Casini Dipartimento di Ingegneria dell Informazione Università di Siena, Italy Email: casini@ing.unisi.it UNIVERSITA DI SIENA 1 Sommario Introduzione all (ACT) Descrizione di
Università di Siena L Marco Casini Dipartimento di Ingegneria dell Informazione Università di Siena, Italy Email: casini@ing.unisi.it UNIVERSITA DI SIENA 1 Sommario Introduzione all (ACT) Descrizione di
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Università degli Studi di Brescia
 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Secondo Anno Automazione Industr per Applicazioni Speciali Curriculum: Robotica e Automazione Industr Coordinatore: Prof. Giovanni Legnani
XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Secondo Anno Automazione Industr per Applicazioni Speciali Curriculum: Robotica e Automazione Industr Coordinatore: Prof. Giovanni Legnani
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms
 Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
Controlli automatici
 Controlli automatici Informazioni sul corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Informazioni generali (1/2) Corso di
Controlli automatici Informazioni sul corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Informazioni generali (1/2) Corso di
Modello dinamico dei robot:
 Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Compito del 14 giugno 2004
 Compito del 14 giugno 004 Un disco omogeneo di raggio R e massa m rotola senza strisciare lungo l asse delle ascisse di un piano verticale. Il centro C del disco è collegato da una molla di costante elastica
Compito del 14 giugno 004 Un disco omogeneo di raggio R e massa m rotola senza strisciare lungo l asse delle ascisse di un piano verticale. Il centro C del disco è collegato da una molla di costante elastica
LABORATORI DI CULTURA DIGITALE: INFORMATICA, INTERNET E ROBOTICA
 Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza. Locomozione Bipede. Fabio Zonfrilli. Corso di Robotica II 11 Febbraio 2004
 Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza Locomozione Bipede Fabio Zonfrilli Corso di Robotica II 11 Febbraio 2004 Sommario Tipologie di sistemi bipedi Passive walkers Hopping
Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza Locomozione Bipede Fabio Zonfrilli Corso di Robotica II 11 Febbraio 2004 Sommario Tipologie di sistemi bipedi Passive walkers Hopping
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
FONDAMENTI DI CONTROLLI AUTOMATICI
 FONDAMENTI DI CONTROLLI AUTOMATICI Prof. Sandro ZAMPIERI zampi@dei.unipd.it tel: 049 827 7648 Dipartimento di Ingegneria dell Informazione via Gradenigo 6/B 1 Informazioni generali Testi: Dispense delle
FONDAMENTI DI CONTROLLI AUTOMATICI Prof. Sandro ZAMPIERI zampi@dei.unipd.it tel: 049 827 7648 Dipartimento di Ingegneria dell Informazione via Gradenigo 6/B 1 Informazioni generali Testi: Dispense delle
LA MECCATRONICA E L AUTOMAZIONE PER LA FABBRICA DEL FUTURO
 LA MECCATRONICA E L AUTOMAZIONE PER LA FABBRICA DEL FUTURO Prof. Alessandro Gasparetto gasparetto@uniud.it Workshop Verso la fabbrica intelligente Udine, 27 Novembre 2014 Che cos è la meccatronica? La
LA MECCATRONICA E L AUTOMAZIONE PER LA FABBRICA DEL FUTURO Prof. Alessandro Gasparetto gasparetto@uniud.it Workshop Verso la fabbrica intelligente Udine, 27 Novembre 2014 Che cos è la meccatronica? La
Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento
 Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento Antonio Marra - Schneider Electric Esempio Applicativo: Vertical
Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento Antonio Marra - Schneider Electric Esempio Applicativo: Vertical
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof Paolo Rocco (paolorocco@polimiit) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof Paolo Rocco (paolorocco@polimiit) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per
Controllo dei manipolatori in contatto con l'ambiente. Relazione sul A.A
 Dipartimento di Ingegneria Meccanica Università di Brescia Dottorato di ricerca in Meccanica Applicata XIX ciclo Controllo dei manipolatori in contatto con l'ambiente Relazione sul A.A. 2004-2005 Giacomo
Dipartimento di Ingegneria Meccanica Università di Brescia Dottorato di ricerca in Meccanica Applicata XIX ciclo Controllo dei manipolatori in contatto con l'ambiente Relazione sul A.A. 2004-2005 Giacomo
Robotica Modellistica, pianificazione e controllo
 Bruno Siciliano è professore di Automatica presso l Università di Napoli Federico II. Lorenzo Sciavicco è professore di Automatica presso l Università di Roma Tre. Luigi Villani è professore di Automatica
Bruno Siciliano è professore di Automatica presso l Università di Napoli Federico II. Lorenzo Sciavicco è professore di Automatica presso l Università di Roma Tre. Luigi Villani è professore di Automatica
Fondamenti di Automatica. Feedback vs Feedforward. Prof. Leonardo Lanari DIS, Università di Roma La Sapienza
 Fondamenti di Automatica Feedback vs Feedforward Prof. Leonardo Lanari DIS, Università di Roma La Sapienza Problema di controllo Problema di controllo: imporre un funzionamento desiderato a un processo
Fondamenti di Automatica Feedback vs Feedforward Prof. Leonardo Lanari DIS, Università di Roma La Sapienza Problema di controllo Problema di controllo: imporre un funzionamento desiderato a un processo
Sistemi di produzione discreti Sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri Lez. 2 - Sistemi manifatturieri 1 I sistemi manifatturieri I sistemi
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri Lez. 2 - Sistemi manifatturieri 1 I sistemi manifatturieri I sistemi
Animazione biologica N. Alberto Borghese
 Animazione biologica N. Alberto Borghese N.B.: Il diritto di scaricare questo file è riservato solamente agli studenti regolarmente iscritti al corso di Animazione Digitale. 1/39 Sommario Il movimento
Animazione biologica N. Alberto Borghese N.B.: Il diritto di scaricare questo file è riservato solamente agli studenti regolarmente iscritti al corso di Animazione Digitale. 1/39 Sommario Il movimento
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 2009-2010 p. 1/11 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma1.it Lucidi tratti dal libro C. Bonivento,
Sistemi Digitali di Controllo A.A. 2009-2010 p. 1/11 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma1.it Lucidi tratti dal libro C. Bonivento,
TECNICHE DI CONTROLLO E DIAGNOSI
 TECNICHE DI CONTROLLO E DIAGNOSI Introduzione al corso Docente: Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Materiale didattico: http://www.silviosimani silviosimani.it/lessons34.html
TECNICHE DI CONTROLLO E DIAGNOSI Introduzione al corso Docente: Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Materiale didattico: http://www.silviosimani silviosimani.it/lessons34.html
Giuseppe Lucisano e Cesare Fantuzzi. Flessibilità ed Adattabilità nella Fabbrica del Futuro
 Cluster Tecnologico Nazionale Fabbrica Intelligente Imprese, università, organismi di ricerca, associazioni e enti territoriali: insieme per la crescita del Manifatturiero Giuseppe Lucisano e Cesare Fantuzzi
Cluster Tecnologico Nazionale Fabbrica Intelligente Imprese, università, organismi di ricerca, associazioni e enti territoriali: insieme per la crescita del Manifatturiero Giuseppe Lucisano e Cesare Fantuzzi
Evento organizzato da. i Basilio Bona
 Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Corso di Studio in Ingegneria dell Automazione Open Day
 Corso di Studio in Ingegneria dell Automazione Open Day 8 Aprile 2017 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Corso di Studio in Ingegneria dell Automazione Open Day 8 Aprile 2017 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
REGISTRO DELLE LEZIONI di Metodi agli Elementi Finiti
 UNIVERSITÀ DEGLI STUDI CAGLIARI FACOLTÀ DI INGEGNERIA E ARCHITETTURA REGISTRO DELLE LEZIONI di Metodi agli Elementi Finiti dettate dal prof. Filippo Bertolino nell Anno Accademico 2013-14 ARGOMENTO DELLA
UNIVERSITÀ DEGLI STUDI CAGLIARI FACOLTÀ DI INGEGNERIA E ARCHITETTURA REGISTRO DELLE LEZIONI di Metodi agli Elementi Finiti dettate dal prof. Filippo Bertolino nell Anno Accademico 2013-14 ARGOMENTO DELLA
07/03/2016. Robot collaborativi per la fabbrica 4.0. Obiettivi del seminario. Lo scenario: la fabbrica 4.0
 ARSControl Automation, Robotics and System Control lab Robot collaborativi per la fabbrica 4.0 Cristian Secchi, Cesare Fantuzzi ARSControl Lab, University of Modena and Reggio Emilia, Italy LA ROBOTICA
ARSControl Automation, Robotics and System Control lab Robot collaborativi per la fabbrica 4.0 Cristian Secchi, Cesare Fantuzzi ARSControl Lab, University of Modena and Reggio Emilia, Italy LA ROBOTICA
ITS MAKER Modulo industrializzazione di prodotto. Modena, febbraio 2017
 ITS MAKER Modulo industrializzazione di prodotto Modena, febbraio 2017 Design for assembly-caratteristiche I prodotti sono progettati in generale seguendo 6 particolari criteri Minimo costo. I singoli
ITS MAKER Modulo industrializzazione di prodotto Modena, febbraio 2017 Design for assembly-caratteristiche I prodotti sono progettati in generale seguendo 6 particolari criteri Minimo costo. I singoli
Controllo LQG/LTR di un Aereo. Corso di Controllo Multivariabile Prof. Francesco Amato
 Controllo LQG/LTR di un Aereo Corso di Controllo Multivariabile Prof. Francesco Amato Cenni di Dinamica del Volo: Variabili del Moto Cenni di Dinamica del Volo: Assi di Riferimento Superfici di Controllo
Controllo LQG/LTR di un Aereo Corso di Controllo Multivariabile Prof. Francesco Amato Cenni di Dinamica del Volo: Variabili del Moto Cenni di Dinamica del Volo: Assi di Riferimento Superfici di Controllo
AUTOMAZIONE INDUSTRIALE Prof. Luca Ferrarini
 POLITECNICO DI MILANO AUTOMAZIONE INDUSTRIALE Prof. Luca Ferrarini Anno Accademico 2009 / 10 24 giugno 2010 COGNOME... NOME... MATRICOLA... FIRMA... Non riportare sulla stessa pagina risposte a domande
POLITECNICO DI MILANO AUTOMAZIONE INDUSTRIALE Prof. Luca Ferrarini Anno Accademico 2009 / 10 24 giugno 2010 COGNOME... NOME... MATRICOLA... FIRMA... Non riportare sulla stessa pagina risposte a domande
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE
 UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE 10 Gennaio 2014 ESAME DI MECCANICA solo PRIMA PARTE versione A Corso di Laurea in Ingegneria Biomedica Esercizio 1 Nel meccanismo in figura,
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE 10 Gennaio 2014 ESAME DI MECCANICA solo PRIMA PARTE versione A Corso di Laurea in Ingegneria Biomedica Esercizio 1 Nel meccanismo in figura,
Fondamenti di Automatica
 Fondamenti di Automatica Esempi applicativi Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Esempi applicativi TESTINA
Fondamenti di Automatica Esempi applicativi Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Esempi applicativi TESTINA
Asservimento visuale
 Corso di Robotica 2 Asservimento visuale Prof. Alessandro De Luca A. De Luca Visual Servoing obiettivo usare informazioni acquisite tramite sensori di visione (telecamere) per controllare la posa/moto
Corso di Robotica 2 Asservimento visuale Prof. Alessandro De Luca A. De Luca Visual Servoing obiettivo usare informazioni acquisite tramite sensori di visione (telecamere) per controllare la posa/moto
Automazione. 20 Gennaio 2016
 Automazione 2 Gennaio 216 Esercizio 1 Un motore elettrico aziona attraverso un organo di trasmissione e riduzione del moto un carico costituito da un braccio robotico che ruota in un piano orizzontale.
Automazione 2 Gennaio 216 Esercizio 1 Un motore elettrico aziona attraverso un organo di trasmissione e riduzione del moto un carico costituito da un braccio robotico che ruota in un piano orizzontale.
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 1 Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Cosa facciamo Corso integrato di automazione industriale
Corso di Automazione industriale Lezione 1 Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Cosa facciamo Corso integrato di automazione industriale
1.3 Sistemi non lineari ad 1 grado di libertà. 1.4 Sistemi non lineari a 2 gradi di libertà 1.5 Sistemi multicorpo. 1.6 La dinamica del corpo rigido
 V Indice XIII XVII 1 1 12 13 19 21 23 25 26 27 27 34 43 52 54 57 62 64 67 67 69 73 75 79 82 Prefazione Introduzione Cap. 1 Sistemi multi-corpo a 1-n gradi di libertà 1.1 Coordinate cartesiane, gradi di
V Indice XIII XVII 1 1 12 13 19 21 23 25 26 27 27 34 43 52 54 57 62 64 67 67 69 73 75 79 82 Prefazione Introduzione Cap. 1 Sistemi multi-corpo a 1-n gradi di libertà 1.1 Coordinate cartesiane, gradi di
Formulazione delle equazioni del moto per un sistema lineare a tre gradi di libertà. Proprietà delle matrici di rigidezza e di flessibilità
 Formulazione delle equazioni del moto per un sistema lineare a tre gradi di libertà Proprietà delle matrici di rigidezza e di flessibilità Prof. Adolfo Santini - Dinamica delle Strutture Introduzione In
Formulazione delle equazioni del moto per un sistema lineare a tre gradi di libertà Proprietà delle matrici di rigidezza e di flessibilità Prof. Adolfo Santini - Dinamica delle Strutture Introduzione In
PALLETTIZZATORI CARTESIANI SERIE PCS
 PALLETTIZZATORI CARTESIANI CON TELAIO PERIMETRALE Nel presente documento presentiamo le due serie di pallettizzatori cartesiani applicati ad un telaio di forma parallelepipeda. Queste serie di macchine
PALLETTIZZATORI CARTESIANI CON TELAIO PERIMETRALE Nel presente documento presentiamo le due serie di pallettizzatori cartesiani applicati ad un telaio di forma parallelepipeda. Queste serie di macchine
Lezione 20. Controllo del moto
 Lezione 20. Controllo del moto . Introduzione In questa lezione si affronta il tema del controllo del moto. Innanzitutto si progetta il controllore della corrente di armatura. Quindi si procederà alla
Lezione 20. Controllo del moto . Introduzione In questa lezione si affronta il tema del controllo del moto. Innanzitutto si progetta il controllore della corrente di armatura. Quindi si procederà alla
Fondamenti di Meccanica Esame del
 Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Lab 1: Controllo di un motore elettrico tramite PID (10+1 punti)
") Lab 1: Controllo di un motore elettrico tramite PID (101 punti) Luca Schenato Email: schenato@dei.unipd.it 8 Gennaio 006 1 Scopo L obiettivo di questo laboratorio è di procedere alla progettazione di un
Lab 1: Controllo di un motore elettrico tramite PID (101 punti) Luca Schenato Email: schenato@dei.unipd.it 8 Gennaio 006 1 Scopo L obiettivo di questo laboratorio è di procedere alla progettazione di un
FONDAMENTI DI AUTOMATICA Corso di Laurea in Ingegneria Aerospaziale Prof. Silvia Strada. Introduzione
 FONDAMENTI DI AUTOMATICA Corso di Laurea in Ingegneria Aerospaziale Prof. Silvia Strada Introduzione 1 Cos è l Automatica? L Automatica è la disciplina che studia i sistemi di automazione, cioè sistemi
FONDAMENTI DI AUTOMATICA Corso di Laurea in Ingegneria Aerospaziale Prof. Silvia Strada Introduzione 1 Cos è l Automatica? L Automatica è la disciplina che studia i sistemi di automazione, cioè sistemi
Ingegneria e Tecnologie dei Sistemi di Controllo. Presentazione di un Progetto d Esame
 Ingegneria e Tecnologie dei Sistemi di Controllo Presentazione di un Progetto d Esame Titolo 2 Progetto del Sistema di Controllo di una Slitta Meccanica azionata mediante un Motore Elettrico in Continua
Ingegneria e Tecnologie dei Sistemi di Controllo Presentazione di un Progetto d Esame Titolo 2 Progetto del Sistema di Controllo di una Slitta Meccanica azionata mediante un Motore Elettrico in Continua
ROBOT CARTESIANI. Abbiamo 9 modelli di robot cartesiani che possono essere forniti in 3 tipologie diverse:
 ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
Tesi Sperimentale. Fabio Perini S.p.A 2012
 Tesi Sperimentale 11/10/2012 Stima del coefficiente resistivo equivalente di un asse meccanico a controllo elettronico INFO: cesare.fantuzzi@unimore.it Citare: TESI Prognostica in KPLPAckaging. Fabio Perini
Tesi Sperimentale 11/10/2012 Stima del coefficiente resistivo equivalente di un asse meccanico a controllo elettronico INFO: cesare.fantuzzi@unimore.it Citare: TESI Prognostica in KPLPAckaging. Fabio Perini
Si consideri il modello elementare planare di un razzo a ugello direzionabile riportato in figura 1.
 Esercitazione Scritta di Controlli Automatici 9-1-29 Si consideri il modello elementare planare di un razzo a ugello direzionabile riportato in figura 1 Figura 1: Modello elementare di razzo a ugello direzionabile
Esercitazione Scritta di Controlli Automatici 9-1-29 Si consideri il modello elementare planare di un razzo a ugello direzionabile riportato in figura 1 Figura 1: Modello elementare di razzo a ugello direzionabile