Politecnico di Milano Dipartimento di Meccanica I passi di un analisi FEM
|
|
|
- Letizia Costanzo
- 8 anni fa
- Visualizzazioni
Transcript
1 Politecnico di Milano Dipartimento di Meccanica Mario Guagliano

2 I PASSI SONO 3 1. MODELLING (Idealizzazione) (ipotesi su vincoli/carichi) 2. ANALISI (statica/dinamica, lineare/nonlineare) (Hardware/Software) 3. POSTPROCESSING (deformata, tensore sforzi/von Mises) (Verifiche dei risultati) 2
 3.")
3 I PASSI DI UN ANALISI FEM ANALISI DEL COMPONENTE MECCANICO REALE INDIVIDUAZIONE DEGLI OBIETTIVI DELL ANALISI SCHEMATIZZAZIONE DEL COMPONENTE E SEMPLIFICAZIONI GEOMETRICHE SCHEMATIZZAZIONE DELLE CONDIZIONI AL CONTORNO OPERATIVAMENTE CONCETTUALMENTE Ø TIPO DI ELEMENTO Ø DIMENSIONE DEGLI ELEMENTI (ANALISI DI CONVERGENZA) Ø CONDIZIONI AL CONTORNO (CARICHI MECCANICI, TERMICI, ECC. E VINCOLI) Ø MODELLAZIONE DEL MATERIALE Ø TIPO DI ANALISI Ø ANALISI E INTERPRETAZIONE DEI RISULTATI 3

4 Esempio CAMERA IPERBARICA SCOPO DELL ANALISI FEM Ø verifica giunzione mantello/fondo Ø verifica della tenuta della porta 4

5 Esempio CAMERA IPERBARICA 5

6 DEFINIZIONE DELLA MESH ü modello geometrico ü scelta tipo di elemento ü dimensione elementi ü condizioni al contorno MODELLARE COMPORTAMENTO DELLA STRUTTURA MODELLARE LA GEOMETRIA 6

7 TIPI DI ELEMENTI STRUTTURE REALI CONTINUE e 3D N DISCRETO DI ELEMENTI FINITI FAMIGLIA (SOLIDI, PIANI, SHELL, ECC.) DOF NUMERO DI NODI/FUNZIONI DI FORMA FORMULAZIONE INTEGRAZIONE 7
 DOF NUMERO DI NODI/FUNZIONI DI FORMA")
8 TIPI DI ELEMENTI Es. TRAVE STRUTTURE REALI 3D ASTA (truss o rod) BEAM (trave) SHELL (gusci) PIANI (sforzo piano, deformazione piana, assialsimmetrici) ELEMENTI RIGIDI ALTRI 3D SOLIDI (esaedro, cunei, tetraedri) 1D ROD 2D AXYSIMMETRIC SHELL 3D SOLIDI BRICK 8
 ELEMENTI RIGIDI ALTRI 3D SOLIDI (esaedro,")
9 INTEGRAZIONE ANALISI STATICA [K] {u} = {F} [K] è la matrice di rigidezza della struttura {u} è il vettore degli spostamenti nodali {F} è il vettore delle forze nodali ANALISI CALCOLO DI VARIABILI u, F nodali σ, ε, ecc. agli elementi FEM utilizza metodi numerici (Algoritmo di Gauss) per integrare le grandezze caratteristiche sul volume di ogni elemento Punti in cui viene eseguito il calcolo numerico sono chiamati punti di integrazione o punti di Gauss Esempio Punti di integrazione in un elemento 2D sforzo piano a 4 nodi 9

10 NUMERO DI NODI E FUNZIONI DI FORMA ANALISI STATICA [K] {u} = {F} {u} è il vettore degli spostamenti nodali di un elemento Negli altri punti dell elemento gli spostamenti sono calcolati interpolando gli spostamenti nodali L ordine di interpolazione (lineare o quadratico) dipende dalle funzioni di forma dell elemento (ovvero dal numero di nodi dell elemento) interpolazione lineare elementi del primo ordine interpolazione quadratica elementi del secondo ordine 10
 interpolazione lineare elementi del primo ordine interpolazione quadratica elementi del secondo")
11 ELEMENTI 1D ASTA ASTA/rod/truss (spar, strut) a 2 nodi punto di integrazione Ø 2 o 3 DOF traslazionali Ø modellare strutture reticolari con elementi snelli incernierati agli estremi Ø supportano solo carichi assiali Ø non ci sono errori di discretizzazione, distorsione Ø (utilizzati per modellare bulloni o collegamenti in modelli assialsimmetrici) INPUT UTENTE OBBLIGATORI AREA SEZIONE TRASVERSALE MATERIALE 11
 INPUT UTENTE OBBLIGATORI AREA SEZIONE TRASVERSALE")
12 Esempi 12

13 ELEMENTI 1D BEAM BEAM/TRAVE a 2 (3) nodi punto di integrazione 1D BEAM Ø 3 DOF traslazionali e 3 DOF rotazionali Ø modellare strutture con elementi snelli (modello di calcolo travi) Ø non ci sono errori di discretizzazione, distorsione Ø facili errori di posizionamento e di rappresentazione nei collegamenti tra elementi Ø hanno sistemi di riferimento locali con un asse lungo lo sviluppo dell elemento trave INPUT UTENTE OBBLIGATORI SEZIONE (caratteristiche geometriche e inerziali) MATERIALE 13
")
14 Esempi 1D BEAM 14

15 ELEMENTI 2D PIANI 15
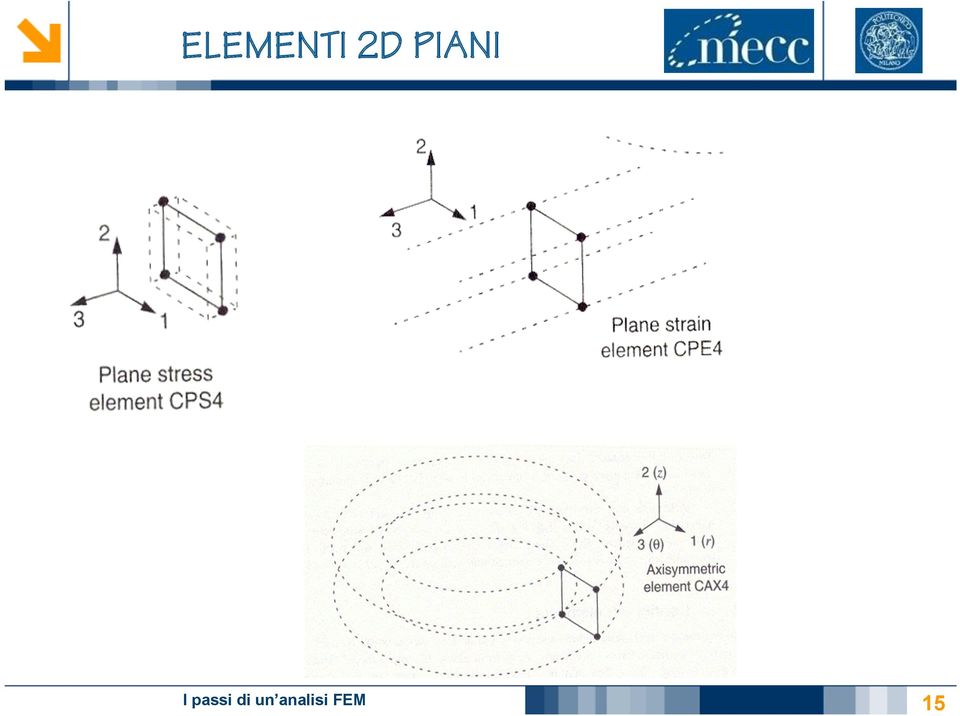
16 ELEMENTI 2D PIANI SFORZO PIANO/PLANE STRESS DEFORMAZIONE PIANA/PLANE STRAIN ASSIALSIMMETRICI/AXYSIMMETRIC v 2 g.d.l. traslazionali a ogni nodo v el. sforzo piano assumono sforzo fuori piano nullo, adatti per modellare strutture sottili v el. deform. piana assumono deform. fuori piano nulla, adatti per modellare strutture spesse v el. assials. adatti per modellare strutture con simmetria assials. e carichi assials. v sezione trasversale costante v (numerazione dei nodi dell elemento in senso orario) a 3, 4, 6, 8 nodi INPUT UTENTE OBBLIGATORI SPESSORE MATERIALE 16

17 ELEMENTI 2D PIANI ESEMPI Elementi a 4 nodi 4 punti di integrazione Elementi a 8 nodi 9 punti di integrazione Ø INTEGRAZIONE PIENA Ø INTEGRAZIONE RIDOTTA Numeri di punti di Gauss richiesti per integrare i termini polinomiali nella matrice di rigidezza di un elemento Significativo effetto sull accuratezza dei risultati 17

18 Esempi ELEMENTI 2D PIANI PLANE STRESS PLANE STRAIN Y AXYSIMMETRIC X 18

19 ELEMENTI SHELL SHELL (PLATE)/GUSCIO (LASTRA) a 3, 4, 6, 8 nodi ü 3 DOF traslazionali e 3 DOF rotazionali ü utili per modellare strutture in parete sottile con larga estensione in confronto ad un ridotto spessore (modello di calcolo guscio) ü sforzi nella direzione dello spessore trascurabili ü mesh relativamente semplici riferite alla superficie media (sovrastima sforzi) ü variazione degli sforzi attraverso lo spessore è lineare ü formulazione thin e thick, effetto del taglio trasversale trascurato o incluso ü possibili errori di modellazione legati alla dimensione degli elementi (el. a 4 nodi) ü possibili errori di modellazione nell unione di elementi con spessore differenti INPUT UTENTE OBBLIGATORI SPESSORE MATERIALE 19

20 ELEMENTI SHELL v definizione OFFSET rispetto alla superficie di riferimento v definizione NORMALE RISULTATI FLESSIONALE + MEMBRANALE v punti di integrazione lungo lo spessore TOP BOTTOM SUPERFICIE MEDIA MEMBRANALE 20

21 ELEMENTI SHELL sforzo membranale sforzo membranale FE sforzo membranale errori di discretizzazione Materiale non efficace errori di discretizzazione 21
22 Esempi ELEMENTI SHELL 22
23 Esempi ELEMENTI SHELL 23
24 SHELL VERSUS 2D/3D STRUTTURE PIANE CARICATE NEL PIANO ANALOGHI RISULTATI ELEMENTI 2D ELEMENTI SHELL STRUTTURE CON CONCENTRAZIONE DI SFORZO DI TIPO STRUTTURALE ES. GIUNZIONI FONDO/MANTELLO ELEMENTI SHELL STRUTTURE CON ELEVATI GRADIENTI DI SFORZO DOVUTI A VARIAZIONI GEOMETRICHE ES. APERTURE IN RECIPIENTI IN PRESSIONE ELEMENTI 3D 24
25 ELEMENTI 3D SOLIDI BRICK /MATTONE (HEXAHEDRAL) WEDGE /CUNEO 4, 6, 8, 10, nodi TETRAHEDRAL/TETRAEDRO TETRAHEDRAL ü 3 g.d.l. traslazionali a ogni nodo ü formulazione non richiede semplificazioni della geometria ü adatte per geometrie complesse derivanti da modellatori solidi ü visualizzazione 2D (wire frame) poco utile ü risultati non accurati con tetraedri in presenza di gradienti degli sforzi WEDGE INPUT UTENTE OBBLIGATORI MATERIALE BRICK 25
26 Esempi ELEMENTI 3D SOLIDI 26
27 REALIZZAZIONE MESH MODELLO GEOMETRICO CARTACEO SUDDIVISIONE IN PARTI O BLOCCHI GENERAZIONE COORDINATE NODALI MODELLO GEOMETRICO GENERAZIONE ELEMENTI SISTEMI CAD o MODELLATORI SOLIDI SUDDIVISIONE IN PARTI O BLOCCHI (GENERAZIONE COORDINATE NODALI) MESHATURA FREE GENERAZIONE ELEMENTI MESHATURA MANUALE MESHATURA LOCAL FREE 27
28 REALIZZAZIONE MESH Es. BARRETTA INTAGLIATA CARICATA ASSIALMENTE CON FORO CENTRALE FREE 1 OPERAZIONE MAPPED 2 OPERAZIONI..ALCUNE OPERAZIONI Warnings o Errori di distorsione 28
29 FREE MESH Permette di ottenere velocemente la mesh (si può indicare solo la dimensione approssimativa degli elementi) I vantaggi e gli svantaggi sono principalmente legati ai modelli solidi (elementi TET). Parametri di qualità: - Pulizia delle superfici - Mesh zone transizione - Posizione nodo intermedio 29
30 REALIZZAZIONE MESH ANALISI DI CONVERGENZA Ø Tipo di elemento Ø Disposizione elementi Ø Dimensione elementi Errori nel calcolo dei gradienti Errori di modellazione geometrica Coarse mesh 14 elementi Normal mesh 112 elementi Fine mesh 448 elementi Very fine mesh 1792 elementi RISULTATI 30
31 REALIZZAZIONE MESH Tipo di elemento Dimensione elementi Disposizione elementi Warnings o Errori legati alla distorsione degli elementi Errori legati al calcolo delle grandezze caratteristiche 31
32 MESH DESIGN Densità mesh dipende dalla complessità della distribuzione degli sforzi In presenza di elevati gradienti di sforzo localizzati è consigliato l utilizzo di discretizzazioni con densità di elementi differenti Mesh ottimizzata richiede un processo iterativo N iterazioni Abilità dell analista Mesh iniziale accurata 32
33 MESH DESIGN Alcuni software commerciali prevedono l utilizzo di schemi iterativi pressoché automatici h-type: si aumenta il numero di elementi, suddividendo gli elementi esistenti r-type: i nodi sono ricollocati per ridurre la dimensione degli elementi p-type: si aumenta l ordine delle funzioni di forma degli elementi Tali metodi generalmente richiedono che la mesh sia generata con un modellatore geometrico Tali metodi possono essere utilizzati nei processi di meshatura manuale o mappata ad eccetto del p-type per il quale è necessario aggiungere nodi interni agli spigoli per aumentare la funzione di forma (elementi usuali hanno al massimo funzioni di forma del 2 ordine) P-ELEMENTS Elementi speciali nei quali l ordine del polinomio viene aumentato senza nodi addizionali Es. PRO-MECHANICA 33
34 TECNICHE DI MODELLAZIONE SUB-STRUCTURING TECNICA CON LA QUALE DIFFERENTI PARTI DI UNA STRUTTURA SONO ANALIZZATE SEPARATAMENTE E POI ASSEMBLATE PER FORMARE LA STRUTTURA COMPLETA TECNICA CON LA QUALE SI ANALIZZA UNA PICCOLA ZONA DELLA STRUTTURA A PARTIRE DAGLI SPOSTAMENTI CALCOLATI MEDIANTE UN MODELLO GLOBALE 34
35 MESH DESIGN REALIZZARE MESH CON DIFFERENTI DENSITA DI ELEMENTI TIPICHE TRANSIZIONI PER RIDURRE IL NUMERO DI ELEMENTI 35
36 CONDIZIONI AL CONTORNO VINCOLI/CONSTRAINTS (BOUNDARY CONDITIONS) constraints impongono valori definiti alle variabili nodali CARICHI/LOADS molteplicità di carichi e coppie concentrate e distribuite 36
37 CONDIZIONI AL CONTORNO VINCOLI/CONSTRAINTS I vincoli devono essere sufficienti per eliminare i moti di corpi rigidi y x Schema di calcolo della trave esistono solo reazioni vincolari in direzione Y Elementi finiti è necessario definire un supporto in direzione X 37
38 VINCOLI/CONSTRAINTS spostamenti e/o rotazioni impedite derivanti dal struttura al contesto circostante vincoli di simmetria multi-point constraints elementi spring/molla elementi gap elementi rigidi collegamento della 38
39 VINCOLI/CONSTRAINTS y Spostamenti u, v, w e/o rotazioni impedite ω, φ, µ (sistema di coordinate cartesiane globale x, y, z) z x Il n di g.d.l dipende dal tipo di elemento Ø ASTA 2 g.d.l. o 3 g.d.l. u,v,w = 0 Ø 2D SP/DP 2 g.d.l. u,v = 0 2D Axy 2 g.d.l. a, r = 0 39
40 VINCOLI/CONSTRAINTS Il n di g.d.l dipende dal tipo di elemento Ø BEAM 6 g.d.l. u,v,w, ω, φ, µ = 0 Ø SHELL 6 g.d.l. u,v,w, ω, φ, µ = 0 Ø SOLIDI 3 g.d.l. u,v,w = 0 40
41 VINCOLI/CONSTRAINTS VINCOLI DI SIMMETRIA SIMMETRIA PIANO XY w, ω, φ = 0 z y x z y x SIMMETRIA PIANO YZ u, φ, µ = 0 SIMMETRIA PIANO XZ v, ω, µ = 0 z y x VINCOLI DI ANTISIMMETRIA z y ANTISIMMETRIA PIANO XZ u, w, φ = 0 x z y x ANTISIMMETRIA PIANO YZ v, w, ω = 0 ANTISIMMETRIA PIANO XY u, v, µ = 0 z y x 41
42 VINCOLI/CONSTRAINTS CONSTRAINT EQUATION or MULTI POINT CONSTRAINTS SLAVE u i = C 1 + C 2 u j + C 3 v k + C 4 w l MASTER dove u n, v n e w n sono gli spostamenti del nodo n nelle direzioni x, y, z e C i è una costante. Anche le rotazioni possono essere inserite, in questo caso i coefficienti avranno una dimensione Es. faccia PIANA 42
43 VINCOLI/CONSTRAINTS CONSTRAINT EQUATION or MULTI POINT CONSTRAINTS LINEARE è un metodo standard per introdurre transizioni di mesh per elementi con funzioni di forma del primo ordine Ogni DOF al nodo p è interpolato linearmente a partire dai corrispondenti DOF dei nodi a e b 43
44 VINCOLI/CONSTRAINTS CONSTRAINT EQUATION or MULTI POINT CONSTRAINTS QUADRATICO è un metodo standard per introdurre transizioni di mesh per elementi del secondo ordine Ogni DOF al nodo p è interpolato quadraticamente a partire dai corrispondenti DOF dei nodi a e b 44
45 VINCOLI/CONSTRAINTS CONSTRAINT EQUATION or MULTI POINT CONSTRAINTS CYCLIC SYMMETRY introduce vincoli per imporre simmetrie cicliche uguagliando gli spostamenti radiali, circonferenziali e assiali ai nodi a e b a b SETTORE ANALIZZATO 45
46 VINCOLI/CONSTRAINTS CONSTRAINT EQUATION or MULTI POINT CONSTRAINTS PIN schematizza una cerniera tra due nodi; spostamenti rotazioni libere TIE tutti i gradi di libertà uguali tra i nodi SLIDER utilizzato per schematizzare il passaggio tra elementi differenti, E necessario in presenza di DOF attivi differenti introdurre dei vincoli cinematici es. beam-shell, beam-solid, shell-solid uguali ai nodi e 46
47 VINCOLI/CONSTRAINTS ü ü ELEMENTI SPRING/MOLLA ü elemento monodimensionale accoppia una forza con relativo spostamento accoppia un momento con relativa rotazione ü può essere lineare o non lineare ü ELEMENTI GAP utile per simulare appoggio monolatero ü ü ELEMENTI RIGIDI ü elemento monodimensionale nessuna richiesta relativa alla geometria elemento di collegamento rigido tra due nodi 47
48 CARICHI/LOADS DA RICORDARE ANALISI LINEARE SFORZI E DEFORMAZIONI SONO DIRETTAMENTE PROPORZIONALI AI CARICHI APPLICATI CARICHI MECCANICI DEVONO ESSERE CONVERTITI IN CARICHI NODALI 48
49 CARICHI/LOADS ANALISI LINEARE applicare carichi unitari e determinare i risultati tramite semplici moltiplicazioni di fattori noti Es. analisi di un recipienti in pressione da verificare sia in prova idraulica sia in condizioni di progetto 49
50 CARICHI/LOADS CARICO NODALE elevata deformazione ed elevato sforzo nel nodo di applicazione rispetto ai nodi circostanti valore locale dello sforzo calcolato al nodo non ha significato reale CARICHI DISTRIBUITI infinito numero di combinazioni di carichi discreti nodali staticamente equivalenti al carico distribuito (in accordo con St. Venant) devono essere trasformati in carichi nodali F i [K] {u} = {F} stesso effetto remoto lontano dal punto di applicazione dei carichi 50
51 CARICHI/LOADS MODALITA DI APPLICAZIONE DEL CARICO P TOT applicato alla curva P TOT / n nodi = P i 51
52 CARICHI NODALI CARICHI/LOADS CARICO DISTRIBUITO PIATTO SOLLECITATO A TRAZIONE 52
53 CARICHI/LOADS Mesh regolare caratterizzata da medesima lunghezza elementi P tot = 1000 N P tot /n elementi = P el 100 N 200 N 200 N 200 N 200 N 100 N 200 N 200 N 200 N 200 N 200 N 53
54 CARICHI/LOADS MESH CON LUNGHEZZA ELEMENTI DIFFERENTI A B C D E L A = mm L B = mm L C = mm L D = mm L E = mm q = P tot /L tot = 50 N/mm q L i = P i APPLICATO NELLA MEZZERIA DELL ELEMENTO COMPETE PER ½ AL NODO DI SX E PER ½ AL NODO DI DX 54
55 CARICHI/LOADS ANALOGO RISULTATO 55
56 CARICHI/LOADS Come ricavare la distribuzione di forze equivalente cinematicamente? analisi con spostamento imposto e si ricavano le reazioni vincolari ai nodi ovvero i carichi da applicare TEORICO Tipo di elemento e funzione di forma distribuzioni dei carichi equivalenti cinematicamente ü carichi sulle curve e sui contorni per elementi 2D ü pressioni su shell e solidi 3D PRATICO Software commerciali 56
57 CARICHI/LOADS ü SPOSTAMENTI ü VELOCITA ü ACCELERAZIONI ü CARICHI TERMICI APPLICATI AI NODI 57
58 CARICHI/LOADS Nelle analisi con differenti componenti di carico PUO ESSERE UTILE 1) utilizzare carichi unitari 2) analizzare i risultati relativi alle differenti componenti di carico per interpretare come la struttura lavora soggetta ai vari carichi (in analisi lineari elastiche vale il principio di sovrapposizione degli effetti) Es. analisi di strutture in ambito civile in presenza di differenti componenti: neve, sisma, vento, peso proprio ecc. 58
59 ANALISI DEFINITI INPUT UTENTE MODELLO GEOMETRICO DISCRETIZZAZIONE TIPO DI ELEMENTI DIMENSIONI DEGLI ELEMENTI CONDIZIONI AL CONTORNO } TIPO DI ANALISI ANALISI STATICA ANALISI DINAMICA TRASMISSIONE DEL CALORE BUCKLING ECC. COMPUTER ANALISI [K] {u} = {F} [M] {ü}+ [C] {u} + [K]. {u} = {F(t)} [C] {T}+ [K] {T} = {Q} 59
60 ANALISI STATICA PROCEDURE DI CONTROLLO Ø PRIMA DELL ANALISI - controllo delle informazioni inserite dall utente da parte del programma - controllo da parte dell utente della consistenza di informazioni introdotte nel caso di utilizzo di software differenti (modellatore e solutore) Ø DURANTE L ANALISI controlli eseguiti dal software possono riportare due tipi di errore, fatali o warning Ø DOPO L ANALISI interpretazione dei risultati da parte dell utente 60
61 ANALISI STATICA [K] {u} = {F} [K] è la matrice di rigidezza della struttura {u} è il vettore degli spostamenti nodali {F} è il vettore delle forze nodali ANALISI RISOLUZIONE DI UN SISTEMA DI N EQUAZIONI LINEARI IN N INCOGNITE (ALGEBRA MATRICIALE) SERIE DI PASSI DEFINITI 61
62 ANALISI STATICA RISOLUZIONE DI UN SISTEMA DI N EQUAZIONI LINEARI IN N INCOGNITE (ALGEBRA MATRICIALE) k 11 u 1 + k 12 u 2 + k 13 u 3 = F 1 k 21 u 1 + k 22 u 2 + k 23 u 3 = F 2 k 31 u 1 + k 32 u 2 + k 33 u 3 = F 3 [K] {u} = {F} ALGORITMO DI ELIMINAZIONE GAUSSIANA 1ª FASE: trasformare il sistema di equazioni in un sistema con matrice dei coefficienti triangolare superiore 2ª FASE: determinazione delle incognite per sostituzione 62
63 ANALISI STATICA 1ª FASE dell algoritmo di eliminazione Gaussiana Manipolazione delle equazioni per trasformare la matrice k 11 u 1 + k 12 u 2 + k 13 u 3 = F 1 k 21 u 1 + k 22 u 2 + k 23 u 3 = F 2 k 31 u 1 + k 32 u 2 + k 33 u 3 = F 3 1ª eq. 2ª eq. 3ª eq. Normalizzo la 1ª equazione (rendere il primo coefficiente unitario) 1ª eq. u 1 + (k 12 / k 11 ) u 2 + (k 13 / k 11 ) u 3 = (1 / k 11 ) F 1 2ª eq. k 21 u 1 + k 22 u 2 + k 23 u 3 = F 2 3ª I passi eq. di un analisi FEM k 31 u 1 + k 32 u 2 + k 33 u 3 = F 3 63
64 ANALISI STATICA Moltiplico la 1ª eq. Per k 21 1ª eq k 21 u 1 + (k 21 k 12 / k 11 ) u 2 + (k 21 k 13 / k 11 ) u 3 = (k 21 / k 11 ) F 1 2ª eq k 21 u 1 + k 22 u 2 + k 23 u 3 = F 2 3ª eq k 31 u 1 + k 32 u 2 + k 33 u 3 = F 3 2ª eq - 1ª eq (k 22 - k 21 k 12 / k 11 ) u 2 + (k 23 - k 21 k 13 / k 11 ) u 3 = F 2 - (k 21 / k 11 ) F 1 k I 22 u 2 + ki 23 u 3 = FI 2 64
65 ANALISI STATICA Dopo la manipolazione delle equazioni ottengo 1ª eq k 11 u 1 + k 12 u 2 + k 13 u 3 = F 1 2ª eq k I 22 u 2 + ki 23 u 3 = FI 2 3ª eq k I 33 u 3 = FI 3 PIVOT [ k 11 k 12 k 13 ] { k I 12 k I 13 k II 13 { u 1 } u 2 u 3 = F 1 F I 2 F I 3 } Risolvo la 3ª eq e sostituisco nelle altre eq. Ricavo le incognite u 1, u 2 e u 3 65
66 TIPICA SEQUENZA DELLE OPERAZIONI ESEGUITE DURANTE L ANALISI DEFINIZIONE DELLA MESH FORMAZIONE DEGLI ELEMENTI ASSEMBLAGGIO DEGLI ELEMENTI DEFINIZIONE DEI VINCOLI NATURA MODULARE DEL METODO FE MATRIX FACTORISATION DEFINIZIONE DEI CARICHI CALCOLO DEGLI SPOSTAMENTI UTENTE INTERPRETAZIONE DEI RISULTATI ANALISI STATICA COMPUTER CALCOLO DEGLI SFORZI E DELLE DEFORMAZIONI UTENTE 66
67 ANALISI STATICA DIAGNOSTICA DEL SOFTWARE AVVISI DI WARNINGS O ERROR ininfluenti indicano alcuni effetti che devono essere presi in considerazione nell interpretazione indicano che l analisi non è valida Sono avvisi di errore che il software rileva prima di ricavare i risultati significativi non impedendone il calcolo; la soluzione arriva al termine WARNINGS ERRORI Sono errori fatali che il software rileva durante la soluzione; non si arriva al termine della soluzione e non si ottengono risultati 67
68 ANALISI STATICA Es. WARNINGS Carico applicato ad un nodo che non esiste Carico applicato ad un nodo vincolato Zone non connesse nel modello Densità del materiale è stata definita nulla Distorsione dell elemente è elevata Vincolo applicato a DOF non attivo Ecc, 68
69 ANALISI STATICA ERRORI NELLA GENERAZIONE DEGLI ELEMENTI E PROBLEMI NELL ASSEMBLAGGIO ü distorsione eccessiva degli elementi - dipende dal tipo di elemento; elemento con funzioni di forma più elevate possono accettare distorsioni maggiori - limitare la distorsione nelle zone di interesse o nelle zone con elevati gradienti di sforzo 69
70 ANALISI STATICA ERRORI NELLA GENERAZIONE DEGLI ELEMENTI E PROBLEMI NELL ASSEMBLAGGIO ü unione non corretta degli elementi (zone non connesse) - verificare la connettività degli elementi; eseguire il merge dei nodi ü unione non corretta di differenti tipi di elementi; introdurre eventuali multi-point constraints 70
71 ANALISI STATICA ERRORI legati al MAL CONDIZIONAMENTO DELLA MATRICE pivot nullo o pivot negativo sono spesso indici di errori nel modello, es. la struttura non è ben vincolata e sono permessi dei moti di corpo rigido pivot molto piccolo in confronto agli altri, questo causa scarsa o addirittura perdita completa di accuratezza nel calcolo dei risultati MATRICE SINGOLARE CAUSE Vincoli non sufficienti per prevenire i moti di corpo rigido Vincoli non sufficienti dovuti alla mancanza di connettività degli elementi, possibili moti di corpo rigido Differenza molto elevata nella rigidezza degli elementi 71
72 ANALISI STATICA Es. ERRORI legato al mal condizionamento del sistema Elevata differenza di rigidezza tra parti dello stesso modello ü Elementi 2D O 3D con rapidi cambiamenti di dimensioni ü Elementi beam o shell hanno rigidezza flessionale proporzionale al cubo della lunghezza; facilmente si possono ottenere rigidezze molto diverse tra loro ü Scelta delle proprietà degli elementi rigidi di collegamento 72
73 ANALISI STATICA Es. ERROR The element has a high aspect ratio so that the lenght of one or more sides is very much greater than the lenght of the shortest side Es. ERROR Il volume dell elemento è definito negativo Es. ERROR Equation 717 Node 125-z PIVOT = 1E-09 Calcolo è sequenziale, di consequenza l errore che si commette è comulativo; maggiore è il numero degli elementi, maggiore è il numero dei DOF e minore sarà l accuratezza nei risultati 73
74 FINE 74
Piani di input e piani di calcolo reale in FaTA-e
 0 1 Piani di input e piani di calcolo reali in FaTA-e Dalla versione XX di FaTA-e è presente una nuova implementazione per il calcolo dei baricentri di massa e rigidezza. La nuova procedura consente di
0 1 Piani di input e piani di calcolo reali in FaTA-e Dalla versione XX di FaTA-e è presente una nuova implementazione per il calcolo dei baricentri di massa e rigidezza. La nuova procedura consente di
La modellazione delle strutture
 La modellazione delle strutture 1 Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-32012
La modellazione delle strutture 1 Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-32012
Procedure di calcolo implicite ed esplicite
 Procedure di calcolo implicite ed esplicite Il problema della modellazione dell impatto tra corpi solidi a medie e alte velocità. La simulazione dell impatto tra corpi solidi in caso di urti a media velocità,
Procedure di calcolo implicite ed esplicite Il problema della modellazione dell impatto tra corpi solidi a medie e alte velocità. La simulazione dell impatto tra corpi solidi in caso di urti a media velocità,
La modellazione delle strutture
 La modellazione delle strutture 1 Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-32012
La modellazione delle strutture 1 Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-32012
La modellazione delle strutture
 La modellazione delle strutture Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-3-2012
La modellazione delle strutture Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-3-2012
Relazione di fine tirocinio. Andrea Santucci
 Relazione di fine tirocinio Andrea Santucci 10/04/2015 Indice Introduzione ii 1 Analisi numerica con COMSOL R 1 1.1 Il Software.................................... 1 1.1.1 Geometria................................
Relazione di fine tirocinio Andrea Santucci 10/04/2015 Indice Introduzione ii 1 Analisi numerica con COMSOL R 1 1.1 Il Software.................................... 1 1.1.1 Geometria................................
Analisi FEM applicata su una sedia da interni
 relazione di fine anno tema del progetto Analisi FEM applicata su una sedia da interni studente matricola Tarantino Francesco 770690 CdLM in Design del Prodotto per l Innovazione 1. Informazioni oggetto
relazione di fine anno tema del progetto Analisi FEM applicata su una sedia da interni studente matricola Tarantino Francesco 770690 CdLM in Design del Prodotto per l Innovazione 1. Informazioni oggetto
Prova d esame del 30 giugno 2010 Soluzione
 UNIVERSITÀ I PIS Facoltà di Ingegneria Meccanica nalitica e dei Continui (CS Ing. Nucleare e della Sicurezza Industriale) Scienza delle Costruzioni (C Ing. Nucleare e della Sicurezza e Protezione) Scienza
UNIVERSITÀ I PIS Facoltà di Ingegneria Meccanica nalitica e dei Continui (CS Ing. Nucleare e della Sicurezza Industriale) Scienza delle Costruzioni (C Ing. Nucleare e della Sicurezza e Protezione) Scienza
La modellazione delle strutture
 La modellazione delle strutture 1 Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-32012
La modellazione delle strutture 1 Programma 31-1-2012 Introduzione e brevi richiami al metodo degli elementi finiti 7-2-2012 La modellazione della geometria 14-2-2012 21-2-2012 28-2-2012 6-3-2012 13-32012
Horae. Horae Software per la Progettazione Architettonica e Strutturale
 1 IL MATERIALE X-LAM Nel programma CDSWin il materiale X-LAM pu ò essere utilizzato solo come elemento parete verticale. Quindi, dal punto di vista strutturale, il suo comportamento è prevalentemente a
1 IL MATERIALE X-LAM Nel programma CDSWin il materiale X-LAM pu ò essere utilizzato solo come elemento parete verticale. Quindi, dal punto di vista strutturale, il suo comportamento è prevalentemente a
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
TRAVE SU SUOLO ELASTICO
 Capitolo 3 TRAVE SU SUOLO ELASTICO (3.1) Combinando la (3.1) con la (3.2) si ottiene: (3.2) L equazione differenziale può essere così riscritta: (3.3) La soluzione dell equazione differenziale di ordine
Capitolo 3 TRAVE SU SUOLO ELASTICO (3.1) Combinando la (3.1) con la (3.2) si ottiene: (3.2) L equazione differenziale può essere così riscritta: (3.3) La soluzione dell equazione differenziale di ordine
Corso di Componenti e Impianti Termotecnici LE RETI DI DISTRIBUZIONE PERDITE DI CARICO LOCALIZZATE
 LE RETI DI DISTRIBUZIONE PERDITE DI CARICO LOCALIZZATE 1 PERDITE DI CARICO LOCALIZZATE Sono le perdite di carico (o di pressione) che un fluido, in moto attraverso un condotto, subisce a causa delle resistenze
LE RETI DI DISTRIBUZIONE PERDITE DI CARICO LOCALIZZATE 1 PERDITE DI CARICO LOCALIZZATE Sono le perdite di carico (o di pressione) che un fluido, in moto attraverso un condotto, subisce a causa delle resistenze
Sussidi didattici per il corso di COSTRUZIONI EDILI. Prof. Ing. Francesco Zanghì TRAVI RETICOLARI AGGIORNAMENTO DEL 7/11/2011
 Sussidi didattici per il corso di COSTRUZIONI EDILI Prof. Ing. Francesco Zanghì TRAVI RETICOLARI AGGIORNAMENTO DEL 7/11/2011 Le travi reticolari sono strutture formate da aste rettilinee, mutuamente collegate
Sussidi didattici per il corso di COSTRUZIONI EDILI Prof. Ing. Francesco Zanghì TRAVI RETICOLARI AGGIORNAMENTO DEL 7/11/2011 Le travi reticolari sono strutture formate da aste rettilinee, mutuamente collegate
Dimensionamento delle strutture
 Dimensionamento delle strutture Prof. Fabio Fossati Department of Mechanics Politecnico di Milano Lo stato di tensione o di sforzo Allo scopo di caratterizzare in maniera puntuale la distribuzione delle
Dimensionamento delle strutture Prof. Fabio Fossati Department of Mechanics Politecnico di Milano Lo stato di tensione o di sforzo Allo scopo di caratterizzare in maniera puntuale la distribuzione delle
TRASMISSIONE DI POTENZA IN AMBITO ELICOTTERISTICO: ANALISI STATICA ED A FATICA DI UNA FUSIONE TRAMITE MODELLI AD ELEMENTI FINITI E PROVE STRUMENTALI.
 Laurea Specialistica in Ingegneria Meccanica TRASMISSIONE DI POTENZA IN AMBITO ELICOTTERISTICO: ANALISI STATICA ED A FATICA DI UNA FUSIONE TRAMITE MODELLI AD ELEMENTI FINITI E PROVE STRUMENTALI. Relatore:
Laurea Specialistica in Ingegneria Meccanica TRASMISSIONE DI POTENZA IN AMBITO ELICOTTERISTICO: ANALISI STATICA ED A FATICA DI UNA FUSIONE TRAMITE MODELLI AD ELEMENTI FINITI E PROVE STRUMENTALI. Relatore:
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Per prima cosa si determinano le caratteristiche geometriche e meccaniche della sezione del profilo, nel nostro caso sono le seguenti;
 !""##"!$%&'((""!" )**&)+,)-./0)*$1110,)-./0)*!""##"!$%&'((""!" *&)23+-0-$4--56%--0.),0-,-%323 -&3%/ La presente relazione ha lo scopo di illustrare il meccanismo di calcolo che sta alla base del dimensionamento
!""##"!$%&'((""!" )**&)+,)-./0)*$1110,)-./0)*!""##"!$%&'((""!" *&)23+-0-$4--56%--0.),0-,-%323 -&3%/ La presente relazione ha lo scopo di illustrare il meccanismo di calcolo che sta alla base del dimensionamento
Introduzione all uso di un programma per analisi agli Elementi Finiti
 L analisi strutturale con il metodo degli elementi finiti Introduzione all uso di un programma per analisi agli Elementi Finiti L analisi di una struttura può essere effettuata attraverso metodi analitici
L analisi strutturale con il metodo degli elementi finiti Introduzione all uso di un programma per analisi agli Elementi Finiti L analisi di una struttura può essere effettuata attraverso metodi analitici
TECNICA DELLE COSTRUZIONI: PROGETTO DI STRUTTURE LE FONDAZIONI
 LE FONDAZIONI Generalità sulle fondazioni Fondazioni dirette Plinti isolati Trave rovescia Esecutivi di strutture di fondazione Generalità Le opere di fondazione hanno il compito di trasferire le sollecitazioni
LE FONDAZIONI Generalità sulle fondazioni Fondazioni dirette Plinti isolati Trave rovescia Esecutivi di strutture di fondazione Generalità Le opere di fondazione hanno il compito di trasferire le sollecitazioni
TIP AND TRICKS 01 DEFINIZIONE DEI PARAMETRI DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA
 TIP AND TRICKS 01 DEFINIZIONE DEI PARAMETRI DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA TECNICA DI DEFINIZIONE DELLE PROPRIETA' DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA Descrizione
TIP AND TRICKS 01 DEFINIZIONE DEI PARAMETRI DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA TECNICA DI DEFINIZIONE DELLE PROPRIETA' DI UNA LASTRA ORTOTROPA EQUIVALENTE A UNA VOLTA MURARIA Descrizione
11 Teorema dei lavori virtuali
 Teorema dei lavori virtuali Teorema dei lavori virtuali Si consideri una trave ad asse rettilineo figura.). Per essa si definisce sistema carichi sollecitazioni CS) l insieme di tutte le grandezze di tipo
Teorema dei lavori virtuali Teorema dei lavori virtuali Si consideri una trave ad asse rettilineo figura.). Per essa si definisce sistema carichi sollecitazioni CS) l insieme di tutte le grandezze di tipo
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
ARGOMENTI DI TECNICA DELLE COSTRUZIONI INDICE
 Giuseppe Stagnitto Erica Barzoni ARGOMENTI DI TECNICA DELLE COSTRUZIONI Applicazioni ed approfondimenti del Corso di FONDAMENTI DI TECNICA DELLE COSTRUZIONI Appunti a cura degli studenti INDICE I - RICHIAMI
Giuseppe Stagnitto Erica Barzoni ARGOMENTI DI TECNICA DELLE COSTRUZIONI Applicazioni ed approfondimenti del Corso di FONDAMENTI DI TECNICA DELLE COSTRUZIONI Appunti a cura degli studenti INDICE I - RICHIAMI
ALCUNE NOTE SULLA MODELLAZIONE FEM DELLE PLATEE DI FONDAZIONE IN C.A.
 Paolo Varagnolo Giorgio Pilloni ALCUNE NOTE SULLA MODELLAZIONE FEM DELLE PLATEE DI FONDAZIONE IN C.A. Ingegneri liberi professionisti Padova luglio 2010 ------------------------- Nella progettazione esecutiva
Paolo Varagnolo Giorgio Pilloni ALCUNE NOTE SULLA MODELLAZIONE FEM DELLE PLATEE DI FONDAZIONE IN C.A. Ingegneri liberi professionisti Padova luglio 2010 ------------------------- Nella progettazione esecutiva
Massimo Rundo Politecnico di Torino Dipartimento Energia Fluid Power Research Laboratory
 La simulazione delle pompe oleodinamiche Massimo Rundo Politecnico di Torino Dipartimento Energia Fluid Power Research Laboratory Politecnico di Torino Dipartimento Energia Macchine a fluido Laboratorio
La simulazione delle pompe oleodinamiche Massimo Rundo Politecnico di Torino Dipartimento Energia Fluid Power Research Laboratory Politecnico di Torino Dipartimento Energia Macchine a fluido Laboratorio
Confronto tra i codici di calcolo QUAD4-M e LSR2D
 2 Confronto tra i codici di calcolo QUAD4-M e LSR2D Introduzione Questo documento riporta un confronto tra i risultati di un analisi di risposta sismica locale condotta con il codice di calcolo LSR2D (Stacec
2 Confronto tra i codici di calcolo QUAD4-M e LSR2D Introduzione Questo documento riporta un confronto tra i risultati di un analisi di risposta sismica locale condotta con il codice di calcolo LSR2D (Stacec
RESISTENZA DEI MATERIALI TEST
 RESISTENZA DEI MATERIALI TEST 1. Nello studio della resistenza dei materiali, i corpi: a) sono tali per cui esiste sempre una proporzionalità diretta tra sollecitazione e deformazione b) sono considerati
RESISTENZA DEI MATERIALI TEST 1. Nello studio della resistenza dei materiali, i corpi: a) sono tali per cui esiste sempre una proporzionalità diretta tra sollecitazione e deformazione b) sono considerati
Il calcolo delle sopraelevazioni in muratura in funzione del livello di conoscenza
 MICHELE VINCI Il calcolo delle sopraelevazioni in muratura in funzione del livello di conoscenza Collana Calcolo di edifici in muratura (www.edificiinmuratura.it) Articolo 2 Ottobre 2013 Bibliografia:
MICHELE VINCI Il calcolo delle sopraelevazioni in muratura in funzione del livello di conoscenza Collana Calcolo di edifici in muratura (www.edificiinmuratura.it) Articolo 2 Ottobre 2013 Bibliografia:
Verifica delle tolleranze attraverso Reverse Engineering: sviluppo di algoritmi per l'analisi di superfici cilindriche
 Laurea Magistrale in Ingegneria Meccanica aa 13-14 Verifica delle tolleranze attraverso Reverse Engineering: sviluppo di algoritmi per l'analisi di superfici cilindriche Candidato: Alessio Trifirò Relatore:
Laurea Magistrale in Ingegneria Meccanica aa 13-14 Verifica delle tolleranze attraverso Reverse Engineering: sviluppo di algoritmi per l'analisi di superfici cilindriche Candidato: Alessio Trifirò Relatore:
L IDENTIFICAZIONE STRUTTURALE
 e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI
 APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
ELEMENTI TRIANGOLARI E TETRAEDRICI A LATI DIRITTI
 EEMENTI TRIANGOARI E TETRAEDRICI A ATI DIRITTI Nella ricerca di unificazione delle problematiche in vista di una generalizzazione delle procedure di sviluppo di elementi finiti, gioca un ruolo importante
EEMENTI TRIANGOARI E TETRAEDRICI A ATI DIRITTI Nella ricerca di unificazione delle problematiche in vista di una generalizzazione delle procedure di sviluppo di elementi finiti, gioca un ruolo importante
7 Applicazioni ulteriori
 7 Applicazioni ulteriori 7 Applicazioni ulteriori 7.1 Strutture con maglie chiuse 7.1.1 Analisi cinematica Si consideri la struttura in figura 7.1: i gradi di libertà sono pari a l =3n c v =3 0 3 = 0,
7 Applicazioni ulteriori 7 Applicazioni ulteriori 7.1 Strutture con maglie chiuse 7.1.1 Analisi cinematica Si consideri la struttura in figura 7.1: i gradi di libertà sono pari a l =3n c v =3 0 3 = 0,
La dinamica degli edifici e le prove sperimentali. Studio del comportamento dinamico di una struttura
 La dinamica degli edifici e le prove sperimentali La Norma UNI 9916 prende in considerazione in modo esplicito il caso della misura delle vibrazioni finalizzata allo: Studio del comportamento dinamico
La dinamica degli edifici e le prove sperimentali La Norma UNI 9916 prende in considerazione in modo esplicito il caso della misura delle vibrazioni finalizzata allo: Studio del comportamento dinamico
Soluzione di equazioni quadratiche
 Soluzione di equazioni quadratiche Soluzione sulla Retta Algebrica Inseriamo sulla Retta Algebrica le seguenti espressioni polinomiali x e x 3 e cerchiamo di individuare i valori di x per i quali i punti
Soluzione di equazioni quadratiche Soluzione sulla Retta Algebrica Inseriamo sulla Retta Algebrica le seguenti espressioni polinomiali x e x 3 e cerchiamo di individuare i valori di x per i quali i punti
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
TEST DI VALIDAZIONE DEL SOFTWARE VEM NL
 1 2 TEST DI VALIDAZIONE DEL SOFTWARE VEM NL Confronto dei risultati tra il software VEM NL el il metodo SAM proposto dall Unità di Ricerca dell Università di Pavia. Stacec s.r.l. Software e servizi per
1 2 TEST DI VALIDAZIONE DEL SOFTWARE VEM NL Confronto dei risultati tra il software VEM NL el il metodo SAM proposto dall Unità di Ricerca dell Università di Pavia. Stacec s.r.l. Software e servizi per
Pordenone, 15-16 Giugno 2012. Relatori: Tecniche per una corretta modellazione strutturale agli elementi finiti. In collaborazione con:
 Pordenone, 15-16 Giugno 2012 In collaborazione con: Galleria San Marco 4 33170 Pordenone Tel. 0434 28465 Fax 0434 28466 E-mail info@csi-italia.eu http://www.csi-italia.eu Tecniche per una corretta modellazione
Pordenone, 15-16 Giugno 2012 In collaborazione con: Galleria San Marco 4 33170 Pordenone Tel. 0434 28465 Fax 0434 28466 E-mail info@csi-italia.eu http://www.csi-italia.eu Tecniche per una corretta modellazione
CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA MECCANICA PROGETTAZIONE ASSISTITA DA COMPUTER I PROVA DI ESAME DEL / / ALLIEVO MATRICOLA
 CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA MECCANICA PROGETTAZIONE ASSISTITA DA COMPUTER I PROVA DI ESAME DEL / / ALLIEVO MATRICOLA Data la MOLLA CONICA mostrata in Figura, proporre uno schema di elaborazione
CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA MECCANICA PROGETTAZIONE ASSISTITA DA COMPUTER I PROVA DI ESAME DEL / / ALLIEVO MATRICOLA Data la MOLLA CONICA mostrata in Figura, proporre uno schema di elaborazione
Prof. Sergio Baragetti. Progettazione FEM
 Prof. Sergio Baragetti Progettazione FEM Perché gli Elementi Finiti Le teorie classiche della meccanica, studiate nei corsi precedenti, sono risolutive nella grande maggioranza dei casi: problemi piani,
Prof. Sergio Baragetti Progettazione FEM Perché gli Elementi Finiti Le teorie classiche della meccanica, studiate nei corsi precedenti, sono risolutive nella grande maggioranza dei casi: problemi piani,
LA TRAVE DI FONDAZIONE SU SUOLO ELASTICO STRATIFICATO DI SPESSORE LIMITATO CON MODULO ELASTICO VARIABILE CON LA PROFONDITÀ
 LA TRAVE DI FONDAZIONE SU SUOLO ELASTICO STRATIFICATO DI SPESSORE LIMITATO CON MODULO ELASTICO VARIABILE CON LA PROFONDITÀ Giovanni Dalerci, Rossella Bovolenta Università degli Studi di Genova Dipartimento
LA TRAVE DI FONDAZIONE SU SUOLO ELASTICO STRATIFICATO DI SPESSORE LIMITATO CON MODULO ELASTICO VARIABILE CON LA PROFONDITÀ Giovanni Dalerci, Rossella Bovolenta Università degli Studi di Genova Dipartimento
Introduzione al Metodo agli Elementi Finiti
 Introduzione al Metodo agli Elementi Finiti Finite Element Method, FEM Finite Element Analysis, FEA Finite Element, FE Applicazione all analisi strutturale Prof. Ciro Santus Dip. di Ingegneria Civile e
Introduzione al Metodo agli Elementi Finiti Finite Element Method, FEM Finite Element Analysis, FEA Finite Element, FE Applicazione all analisi strutturale Prof. Ciro Santus Dip. di Ingegneria Civile e
DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE
 DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE Per un corretto dimensionamento del martinetto a ricircolo di sfere è necessario operare come segue: definizione dei dati del dell applicazione (A)
DIMENSIONAMENTO DEL MARTINETTO PER RICIRCOLO DI SFERE Per un corretto dimensionamento del martinetto a ricircolo di sfere è necessario operare come segue: definizione dei dati del dell applicazione (A)
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
STRUTTURE MISTE ACCIAIO-CLS Lezione 2
 STRUTTURE MISTE ACCIAIO-CLS Lezione 2 I SISTEMI DI CONNESSIONE Tipologie di connettori Calcolo della sollecitazione nei connettori Connettori a totale ripristino di resistenza Connettori a parziale ripristino
STRUTTURE MISTE ACCIAIO-CLS Lezione 2 I SISTEMI DI CONNESSIONE Tipologie di connettori Calcolo della sollecitazione nei connettori Connettori a totale ripristino di resistenza Connettori a parziale ripristino
Matrice rappresent. Base ker e img. Rappresentazione cartesiana ker(f) + im(f).
 + im(f).") Due Matrici A,B. Ker f = ker g. 1- Ridurre a scala A e B e faccio il sistema. 2 Se Vengono gli stessi valori allora, i ker sono uguali. Cauchy 1 autovalore, 1- Metto a matrice x1(0),x2(0),x3(0) e la chiamo
Due Matrici A,B. Ker f = ker g. 1- Ridurre a scala A e B e faccio il sistema. 2 Se Vengono gli stessi valori allora, i ker sono uguali. Cauchy 1 autovalore, 1- Metto a matrice x1(0),x2(0),x3(0) e la chiamo
Collegamenti nelle strutture
 1 Collegamenti nelle strutture Le tipologie delle unioni bullonate o saldate sono molteplici e dipendono essenzialmente da: caratteristiche dell unione: nell ambito di quelle bullonate si possono avere
1 Collegamenti nelle strutture Le tipologie delle unioni bullonate o saldate sono molteplici e dipendono essenzialmente da: caratteristiche dell unione: nell ambito di quelle bullonate si possono avere
Ottimizazione vincolata
 Ottimizazione vincolata Ricordiamo alcuni risultati provati nella scheda sulla Teoria di Dini per una funzione F : R N+M R M di classe C 1 con (x 0, y 0 ) F 1 (a), a = (a 1,, a M ), punto in cui vale l
Ottimizazione vincolata Ricordiamo alcuni risultati provati nella scheda sulla Teoria di Dini per una funzione F : R N+M R M di classe C 1 con (x 0, y 0 ) F 1 (a), a = (a 1,, a M ), punto in cui vale l
SETTI O PARETI IN C.A.
 SETTI O PARETI IN C.A. Parete Pareti accoppiate SETTI O PARETI IN C.A. Na 20% Fh i i h i Na/M tot >=0.2 SETTI O PARETI IN C.A. IL FATTORE DI STRUTTURA VERIFICHE SETTI O PARETI IN C.A. SOLLECITAZIONI -FLESSIONE
SETTI O PARETI IN C.A. Parete Pareti accoppiate SETTI O PARETI IN C.A. Na 20% Fh i i h i Na/M tot >=0.2 SETTI O PARETI IN C.A. IL FATTORE DI STRUTTURA VERIFICHE SETTI O PARETI IN C.A. SOLLECITAZIONI -FLESSIONE
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
ELEMENTI SHELL Piastra forata
 ELEMENTI SHELL Piastra forata Modellazione geometrica È possibile semplificare la geometria per una modellazione più agevole e migliore accuratezza dei risultati: Ridurre i raccordi, gli smussi, le forme
ELEMENTI SHELL Piastra forata Modellazione geometrica È possibile semplificare la geometria per una modellazione più agevole e migliore accuratezza dei risultati: Ridurre i raccordi, gli smussi, le forme
LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante
 z + p / γ = costante") IDRAULICA LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante 2 LEGGE DI STEVIN Z = ALTEZZA GEODETICA ENERGIA POTENZIALE PER UNITA DI PESO p /
IDRAULICA LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante 2 LEGGE DI STEVIN Z = ALTEZZA GEODETICA ENERGIA POTENZIALE PER UNITA DI PESO p /
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
2. Giovedì 5/03/2015, 11 13. ore: 2(4) Spazi vettoriali euclidei. Vettori nello spazio fisico: Prodotto scalare e prodotto
 Spazi vettoriali euclidei. Vettori nello spazio fisico: Prodotto scalare e prodotto") Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2014/2015 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2015 1. Lunedì 2/03/2015, 11 13. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2014/2015 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2015 1. Lunedì 2/03/2015, 11 13. ore: 2(2) Presentazione
IL TRACCIAMENTO QUALITATIVO DEL MOMENTO FLETTENTE NEI PORTALI
 IL TRACCIAMENTO QUALITATIVO DEL MOMENTO FLETTENTE NEI PORTALI Alcune proprietà della deformata dei portali Si esaminano nel seguito alcune proprietà della deformata dei portali. Queste proprietà permettono
IL TRACCIAMENTO QUALITATIVO DEL MOMENTO FLETTENTE NEI PORTALI Alcune proprietà della deformata dei portali Si esaminano nel seguito alcune proprietà della deformata dei portali. Queste proprietà permettono
PORTANZA DELLE FONDAZIONI
 1 N.T.C. 2008, Capitolo 6.4 - OPERE DI FONDAZIONE Nelle verifiche di sicurezza devono essere presi in considerazione tutti i meccanismi di stato limite ultimo, sia a breve sia a lungo termine. Gli stati
1 N.T.C. 2008, Capitolo 6.4 - OPERE DI FONDAZIONE Nelle verifiche di sicurezza devono essere presi in considerazione tutti i meccanismi di stato limite ultimo, sia a breve sia a lungo termine. Gli stati
La funzione di trasferimento
 Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Sistema di diagnosi CAR TEST
 Data: 30/09/09 1 di 7 Sistema di diagnosi CAR TEST Il sistema di diagnosi CAR TEST venne convenientemente utilizzato per: - verificare che la scocca di un veicolo sia dimensionalmente conforme ai disegni
Data: 30/09/09 1 di 7 Sistema di diagnosi CAR TEST Il sistema di diagnosi CAR TEST venne convenientemente utilizzato per: - verificare che la scocca di un veicolo sia dimensionalmente conforme ai disegni
MATRICE DELLE COMPETENZE DI SCIENZE E TECNOLIE APPLICATE INDIRIZZO DI MECCANICA, MECCATRONICA ED ENERGIA
 MATRICE DELLE COMPETENZE DI SCIENZE E TECNOLIE APPLICATE INDIRIZZO DI MECCANICA, MECCATRONICA ED ENERGIA Competenze in esito al quinquennio (dall Allegato C del Regolamento) 1. Individuare le proprietà
MATRICE DELLE COMPETENZE DI SCIENZE E TECNOLIE APPLICATE INDIRIZZO DI MECCANICA, MECCATRONICA ED ENERGIA Competenze in esito al quinquennio (dall Allegato C del Regolamento) 1. Individuare le proprietà
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
HPRS FINAL CONFERENCE. Utilizzo del metodo FEM nel progetto HPRS. Redatta da: Ing. Daniele Lai - IMAL
 HPRS FINAL CONFERENCE Utilizzo del metodo FEM nel progetto HPRS Redatta da: Ing. Daniele Lai - IMAL Descrizione sommaria del metodo FEM Dove è richiesta l analisi FEM L analisi FEM applicata all iniettore
HPRS FINAL CONFERENCE Utilizzo del metodo FEM nel progetto HPRS Redatta da: Ing. Daniele Lai - IMAL Descrizione sommaria del metodo FEM Dove è richiesta l analisi FEM L analisi FEM applicata all iniettore
e-dva - eni-depth Velocity Analysis
 Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
VERIFICA DELLE IPOTESI
 VERIFICA DELLE IPOTESI Nella verifica delle ipotesi è necessario fissare alcune fasi prima di iniziare ad analizzare i dati. a) Si deve stabilire quale deve essere l'ipotesi nulla (H0) e quale l'ipotesi
VERIFICA DELLE IPOTESI Nella verifica delle ipotesi è necessario fissare alcune fasi prima di iniziare ad analizzare i dati. a) Si deve stabilire quale deve essere l'ipotesi nulla (H0) e quale l'ipotesi
MODELLAZIONE DI UN EDIFICIO IN MURATURA CON IL PROGRAMMA DI CALCOLO 3MURI
 MODELLAZIONE DI UN EDIFICIO IN MURATURA CON IL PROGRAMMA DI CALCOLO 3MURI 1) CREARE UN FILE.DXF IN AUTOCAD NEL QUALE VENGONO RIPORTATE LE PIANTE DEI VARI PIANI DELL EDIFICIO DA ANALIZZARE. RISULTA CONVENIENTE
MODELLAZIONE DI UN EDIFICIO IN MURATURA CON IL PROGRAMMA DI CALCOLO 3MURI 1) CREARE UN FILE.DXF IN AUTOCAD NEL QUALE VENGONO RIPORTATE LE PIANTE DEI VARI PIANI DELL EDIFICIO DA ANALIZZARE. RISULTA CONVENIENTE
INDICE. _Abstract pag. 3. 1. Il Benchmark pag. 5. 2. Modellazione in SAP2000 pag. 6. 2.1 La Griglia (GRID) pag. 7. 2.2 I Materiali pag.
 pag. 7. 2.2 I Materiali pag.") INDICE _Abstract pag. 3 1. Il Benchmark pag. 5 2. Modellazione in SAP2000 pag. 6 2.1 La Griglia (GRID) pag. 7 2.2 I Materiali pag. 9 2.3 Le Sezioni degli Elementi Strutturali pag. 12 2.4 Definizione dei
INDICE _Abstract pag. 3 1. Il Benchmark pag. 5 2. Modellazione in SAP2000 pag. 6 2.1 La Griglia (GRID) pag. 7 2.2 I Materiali pag. 9 2.3 Le Sezioni degli Elementi Strutturali pag. 12 2.4 Definizione dei
Università degli Studi di Palermo
 Dipartimento di Ingegneria Chimica, Gestionale, Informatica e Meccanica Università degli Studi di Palermo Corso in: SIMULAZIONE NUMERICA PER L'INGEGNERIA MECCANICA Docente: Prof. Antonio Pantano Anno Accademico
Dipartimento di Ingegneria Chimica, Gestionale, Informatica e Meccanica Università degli Studi di Palermo Corso in: SIMULAZIONE NUMERICA PER L'INGEGNERIA MECCANICA Docente: Prof. Antonio Pantano Anno Accademico
I processi di tempra sono condotti sul manufatto finito per generare sforzi residui di compressione in superficie. Vengono sfruttate allo scopo
 I processi di tempra sono condotti sul manufatto finito per generare sforzi residui di compressione in superficie. Vengono sfruttate allo scopo diverse metodologie. 1 La tempra termica (o fisica) si basa
I processi di tempra sono condotti sul manufatto finito per generare sforzi residui di compressione in superficie. Vengono sfruttate allo scopo diverse metodologie. 1 La tempra termica (o fisica) si basa
CONI, CILINDRI, SUPERFICI DI ROTAZIONE
 CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
Comportamento dinamico di valvole
 Comportamento dinamico di valvole Dott. Ing. Mario Cozzani Srl & Università degli Studi di Genova Felice Sfravara, Fabio Manfrone, Luca Montanelli, Massimo Schiavone, Andrea Raggi Obiettivi del progetto
Comportamento dinamico di valvole Dott. Ing. Mario Cozzani Srl & Università degli Studi di Genova Felice Sfravara, Fabio Manfrone, Luca Montanelli, Massimo Schiavone, Andrea Raggi Obiettivi del progetto
SIMULAZIONI LTCA MEDIANTE METODI F.E.M. PER L ANALISI DI INGRANAGGI CILINDRICI A DENTI DRITTI
 Autori: SIMULAZIONI LTCA MEDIANTE METODI F.E.M. PER L ANALISI DI INGRANAGGI CILINDRICI A DENTI DRITTI Marco Beghini Fabio Presicce Ciro Santus Marco Facchini Collaborazione fra DIMNP, Università di Pisa
Autori: SIMULAZIONI LTCA MEDIANTE METODI F.E.M. PER L ANALISI DI INGRANAGGI CILINDRICI A DENTI DRITTI Marco Beghini Fabio Presicce Ciro Santus Marco Facchini Collaborazione fra DIMNP, Università di Pisa
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
EDIFICI IN MURATURA ORDINARIA, ARMATA O MISTA
 Edifici in muratura portante 2 1 Cosa è ANDILWall? ANDILWall è un software di analisi strutturale che utilizza il motore di calcolo SAM II, sviluppato presso l Università degli Studi di Pavia e presso
Edifici in muratura portante 2 1 Cosa è ANDILWall? ANDILWall è un software di analisi strutturale che utilizza il motore di calcolo SAM II, sviluppato presso l Università degli Studi di Pavia e presso
1 PREMESSE E SCOPI... 3 2 DESCRIZIONE DEI SUPPORTI SOTTOPOSTI A PROVA... 3 3 PROGRAMMA DELLE PROVE SPERIMENTALI... 5
 DI UN SISTEMA DI FISSAGGIO PER FACCIATE CONTINUE 2 INDICE 1 PREMESSE E SCOPI... 3 2 DESCRIZIONE DEI SUPPORTI SOTTOPOSTI A PROVA... 3 3 PROGRAMMA DELLE PROVE SPERIMENTALI... 5 3.1 STRUMENTAZIONE UTILIZZATA...
DI UN SISTEMA DI FISSAGGIO PER FACCIATE CONTINUE 2 INDICE 1 PREMESSE E SCOPI... 3 2 DESCRIZIONE DEI SUPPORTI SOTTOPOSTI A PROVA... 3 3 PROGRAMMA DELLE PROVE SPERIMENTALI... 5 3.1 STRUMENTAZIONE UTILIZZATA...
GEOTECNICA. ing. Nunziante Squeglia 13. OPERE DI SOSTEGNO. Corso di Geotecnica Corso di Laurea in Ingegneria Edile - Architettura
 GEOTECNICA 13. OPERE DI SOSTEGNO DEFINIZIONI Opere di sostegno rigide: muri a gravità, a mensola, a contrafforti.. Opere di sostegno flessibili: palancole metalliche, diaframmi in cls (eventualmente con
GEOTECNICA 13. OPERE DI SOSTEGNO DEFINIZIONI Opere di sostegno rigide: muri a gravità, a mensola, a contrafforti.. Opere di sostegno flessibili: palancole metalliche, diaframmi in cls (eventualmente con
DOLMEN PRESENTAZIONE DEL CODICE DI CALCOLO
 DOLMEN PRESENTAZIONE DEL CODICE DI CALCOLO Il codice di calcolo DOLMEN è prodotto, distribuito ed assistito dalla CDM DOLMEN srl, con sede in Torino, Via B. Drovetti 9F. La società produttrice è presente
DOLMEN PRESENTAZIONE DEL CODICE DI CALCOLO Il codice di calcolo DOLMEN è prodotto, distribuito ed assistito dalla CDM DOLMEN srl, con sede in Torino, Via B. Drovetti 9F. La società produttrice è presente
Capriate in legno I edizione aprile 2011. Indice Introduzione
 Capriate in legno I edizione aprile 2011 Indice Introduzione 1. Il legno e sue applicazioni 1.1. Il legno come materiale da costruzione 1.2. diffusione del legno 1.3. Standardizzazione della produzione
Capriate in legno I edizione aprile 2011 Indice Introduzione 1. Il legno e sue applicazioni 1.1. Il legno come materiale da costruzione 1.2. diffusione del legno 1.3. Standardizzazione della produzione
Analisi non lineari statiche e dinamiche valutate con il software: ETABS
 Dipartimento di Ingegneria CORSO DI LAUREA IN INGENGNERIA CIVILE PER LA PROTEZIONE DAI RISCHI NATURALI Relazione di fine tirocinio Analisi non lineari statiche e dinamiche valutate con il software: ETABS
Dipartimento di Ingegneria CORSO DI LAUREA IN INGENGNERIA CIVILE PER LA PROTEZIONE DAI RISCHI NATURALI Relazione di fine tirocinio Analisi non lineari statiche e dinamiche valutate con il software: ETABS
McGraw-Hill. Tutti i diritti riservati
 Copyright 004 The Companies srl e Corbusier - Progetto per il palazzo dei Soviet a Mosca 1931 Problema 1. Arco Trave di copertura Tirante bielle Membrana di copertura Fig. P1.1 Analizzare il sistema in
Copyright 004 The Companies srl e Corbusier - Progetto per il palazzo dei Soviet a Mosca 1931 Problema 1. Arco Trave di copertura Tirante bielle Membrana di copertura Fig. P1.1 Analizzare il sistema in
E mail: emadelmo@dicea.unifi.it Web: www.dicea.unifi.it/~emadelmo. Firenze, 12/03/2009
 www.dicea.unifi.it Anno accademico 2008/2009 Ingegneria Sismica CIS Emanuele Del Monte E mail: emadelmo@dicea.unifi.it Web: www.dicea.unifi.it/~emadelmo Firenze, 12/03/2009 PRIMA PARTE CARATTERISTICHE
www.dicea.unifi.it Anno accademico 2008/2009 Ingegneria Sismica CIS Emanuele Del Monte E mail: emadelmo@dicea.unifi.it Web: www.dicea.unifi.it/~emadelmo Firenze, 12/03/2009 PRIMA PARTE CARATTERISTICHE
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Modelli di dimensionamento
 Introduzione alla Norma SIA 266 Modelli di dimensionamento Franco Prada Studio d ing. Giani e Prada Lugano Testo di: Joseph Schwartz HTA Luzern Documentazione a pagina 19 Norma SIA 266 - Costruzioni di
Introduzione alla Norma SIA 266 Modelli di dimensionamento Franco Prada Studio d ing. Giani e Prada Lugano Testo di: Joseph Schwartz HTA Luzern Documentazione a pagina 19 Norma SIA 266 - Costruzioni di
13. Campi vettoriali
 13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
Verifiche di sicurezza di una costruzione 1/2
 Verifiche di sicurezza di una costruzione 1/2 Le costruzioni devono soddisfare opportuni requisiti di sicurezza nei confronti della loro capacità portante Capacità portante Attitudine di una struttura
Verifiche di sicurezza di una costruzione 1/2 Le costruzioni devono soddisfare opportuni requisiti di sicurezza nei confronti della loro capacità portante Capacità portante Attitudine di una struttura
Richiami sulle derivate parziali e definizione di gradiente di una funzione, sulle derivate direzionali. Regola della catena per funzioni composte.
 PROGRAMMA di Fondamenti di Analisi Matematica 2 (che sarà svolto fino al 7 gennaio 2013) A.A. 2012-2013, Paola Mannucci e Claudio Marchi, Canali 1 e 2 Ingegneria Gestionale, Meccanica-Meccatronica, Vicenza
PROGRAMMA di Fondamenti di Analisi Matematica 2 (che sarà svolto fino al 7 gennaio 2013) A.A. 2012-2013, Paola Mannucci e Claudio Marchi, Canali 1 e 2 Ingegneria Gestionale, Meccanica-Meccatronica, Vicenza
Estensimetri o Strain Gauges
 Estensimetri o Strain Gauges Sforzi e deformazioni in un corpo elastico Consideriamo un parallelepipedo di materiale W H F dove è la lunghezza e S = W H è la sezione. Definiamo sforzo (stress) il rapporto
Estensimetri o Strain Gauges Sforzi e deformazioni in un corpo elastico Consideriamo un parallelepipedo di materiale W H F dove è la lunghezza e S = W H è la sezione. Definiamo sforzo (stress) il rapporto
Le equazioni. Diapositive riassemblate e rielaborate da prof. Antonio Manca da materiali offerti dalla rete.
 Le equazioni Diapositive riassemblate e rielaborate da prof. Antonio Manca da materiali offerti dalla rete. Definizione e caratteristiche Chiamiamo equazione l uguaglianza tra due espressioni algebriche,
Le equazioni Diapositive riassemblate e rielaborate da prof. Antonio Manca da materiali offerti dalla rete. Definizione e caratteristiche Chiamiamo equazione l uguaglianza tra due espressioni algebriche,
Corso di Costruzioni Aeronautiche
 Corso di Costruzioni Aeronautiche Introduzione al metodo degli elementi finiti 13 Novembre 2013 Ing. Mauro Linari Senior Project Manager MSC Softw are S.r.l. La schematizzazione delle strutture Considerazioni
Corso di Costruzioni Aeronautiche Introduzione al metodo degli elementi finiti 13 Novembre 2013 Ing. Mauro Linari Senior Project Manager MSC Softw are S.r.l. La schematizzazione delle strutture Considerazioni
MODULO GRAT PROCEDURA TRASFXY TEST CASES
 TC GRAT/TrasfXY 1 MODULO GRAT PROCEDURA TRASFXY TEST CASES 1 TC TRASFXY 1 - Graticcio a 17 aste carico nel perimetro aste ripartizione in direz. Y Trave 1 Trave 2 Trave 3 Traverso 1 Traverso 2 Traverso
TC GRAT/TrasfXY 1 MODULO GRAT PROCEDURA TRASFXY TEST CASES 1 TC TRASFXY 1 - Graticcio a 17 aste carico nel perimetro aste ripartizione in direz. Y Trave 1 Trave 2 Trave 3 Traverso 1 Traverso 2 Traverso
Esempio. Approssimazione con il criterio dei minimi quadrati. Esempio. Esempio. Risultati sperimentali. Interpolazione con spline cubica.
 Esempio Risultati sperimentali Approssimazione con il criterio dei minimi quadrati Esempio Interpolazione con spline cubica. Esempio 1 Come procedere? La natura del fenomeno suggerisce che una buona approssimazione
Esempio Risultati sperimentali Approssimazione con il criterio dei minimi quadrati Esempio Interpolazione con spline cubica. Esempio 1 Come procedere? La natura del fenomeno suggerisce che una buona approssimazione
. Si determina quindi quale distanza viene percorsa lungo l asse y in questo intervallo di tempo: h = v 0y ( d
 Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Università di Roma Tor Vergata
 Università di oma Tor Vergata Facoltà di Ingegneria Dipartimento di Ingegneria Industriale Corso di: TEMOTECNIC 1 IMPINTI DI ISCLDMENTO D CQU: DIMENSIONMENTO Ing. G. Bovesecchi gianluigi.bovesecchi@gmail.com
Università di oma Tor Vergata Facoltà di Ingegneria Dipartimento di Ingegneria Industriale Corso di: TEMOTECNIC 1 IMPINTI DI ISCLDMENTO D CQU: DIMENSIONMENTO Ing. G. Bovesecchi gianluigi.bovesecchi@gmail.com
UNIVERSITÀ DEGLI STUDI DI ROMA TOR VERGATA
 Facoltà di Ingegneria Corso di Laurea in Ingegneria Civile Analisi Statica Lineare Dott. Ing. Simone Beccarini Email: sbeccarini@hotmail.it Analisi statica lineare Cos è il periodo di vibrazione? Il Periodo
Facoltà di Ingegneria Corso di Laurea in Ingegneria Civile Analisi Statica Lineare Dott. Ing. Simone Beccarini Email: sbeccarini@hotmail.it Analisi statica lineare Cos è il periodo di vibrazione? Il Periodo
24 - Strutture simmetriche ed antisimmetriche
 24 - Strutture simmetriche ed antisimmetriche ü [.a. 2011-2012 : ultima revisione 1 maggio 2012] In questo capitolo si studiano strutture piane che presentano proprieta' di simmetria ed antisimmetria sia
24 - Strutture simmetriche ed antisimmetriche ü [.a. 2011-2012 : ultima revisione 1 maggio 2012] In questo capitolo si studiano strutture piane che presentano proprieta' di simmetria ed antisimmetria sia
LA CATENA DI ASSICURAZIONE. Lezione a cura di Torrini Andrea
 LA CATENA DI ASSICURAZIONE Lezione a cura di Torrini Andrea PARLEREMO IN QUESTA LEZIONE DI: Significato di CATENA DI ASSICURAZIONE Dimensionamento della CATENA DI ASSICURAZIONE Forza di Arresto Fattore
LA CATENA DI ASSICURAZIONE Lezione a cura di Torrini Andrea PARLEREMO IN QUESTA LEZIONE DI: Significato di CATENA DI ASSICURAZIONE Dimensionamento della CATENA DI ASSICURAZIONE Forza di Arresto Fattore
Certificazione di produzione di codice di calcolo Programma CAP3
 1 Certificazione di produzione di codice di calcolo Programma CAP3 1) CARATTERISTICHE DEL CODICE Titolo programma : CAP3 - Travi precompresse ad armatura pretesa, Metodo agli stati limite. Autore : ing.
1 Certificazione di produzione di codice di calcolo Programma CAP3 1) CARATTERISTICHE DEL CODICE Titolo programma : CAP3 - Travi precompresse ad armatura pretesa, Metodo agli stati limite. Autore : ing.
Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA
 Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA turbine eoliche ad asse verticale VAWT A.A. 2008/09 Energie Alternative Prof.B.Fortunato
Politecnico di Bari I Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica ENERGIA EOLICA turbine eoliche ad asse verticale VAWT A.A. 2008/09 Energie Alternative Prof.B.Fortunato