Comportamento a regime dei sistemi in retroazione per segnali di ingresso canonici
|
|
|
- Cosima Gianni
- 8 anni fa
- Visualizzazioni
Transcript
1 Comortamento a regime dei itemi in retroazione er egnali di ingreo anonii

2 Errore a regime ed ineguimento Un obiettivo rimario nella rogettazione dei itemi di ontrollo è l ineguimento del egnale di riferimento Analizziamo le rorietà di ineguimento dei itemi di ontrollo in retroazione a regime er egnali anonii alolando l errore di ineguimento ogni egnale uò eere viluato in erie di Taylor ed eere aroimato da una.l. di egnali anonii

3 R E - Y E R - Y R - R R Analizziamo il omortamento a regime di E er egnali di ingreo anonii gradino, rama, arabola.. R r t k k gradino k rama k 2 arabola k t k! ell iotei he il itema a ilo hiuo ia tabile, oiamo aliare il teorema del valore finale

4 k t R E t e e k e Affinhè l errore a regime ia finito, devono emlifiari i k oli nell origine Poihé: il numero di oli nell origine di oinide on il numero di zeri nell origine di / on

5 efiniamo tio di un itema il numero di oli nell origine he oiede: Sitema di tio zero: non ha oli nell origine Sitema di tio uno: ha un olo nell origine Sitema di tio due: ha due oli nell origine.

6 Errore al gradino er un itema di tio zero k e on k oizione otante di k k e errore è finito e diminuie all aumentare del guadagno di Bode di

7 Errore al gradino er un itema di tio uno e k on k e erhè errore è nullo, a regime i ottiene l ineguimento erfetto o teo aade er itemi di tio due, tre.

8 Errore alla rama er un itema di tio zero k e on k e

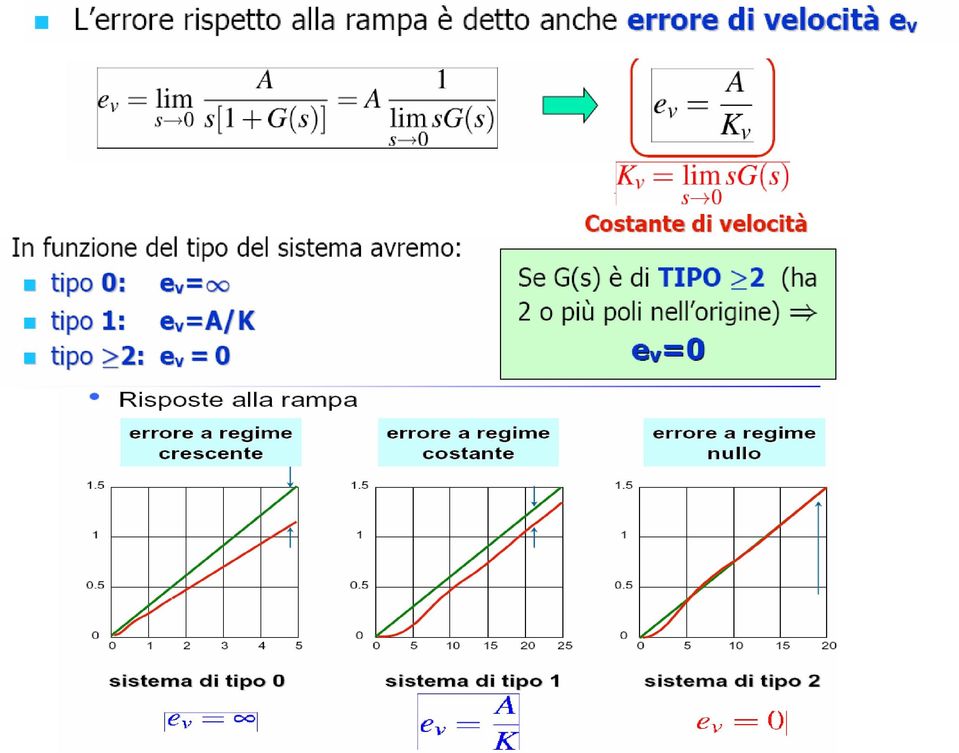
9 Errore alla rama er un itema di tio uno k e on k v k e ~ ~ ~ veloità otante di ~ k o v

10 Errore alla rama er un itema di tio due k e on k ~ ~ e

11

12
13 Se un itema non ha il numero di oli nell origine neeari a garantire l errore a regime rihieto, è oibile introdurli tramite il ontrollore Analogamente il ontrollore uò modifiare il valore dell errore a regime introduendo un guadagno oortuno e rorietà di ineguimento a regime oono quindi eere modifiate da un ontrollore del tio: on k ed l oortuni C k l C è detto ontrollore tatio inerimento del ontrollore tatio ridue il margine di fae del itema e uò renderlo intabile

14 Eemio ato il roeo on f.d.t.: P 2 rogettare un ontrollore he garantia: - errore a regime er un ingreo a gradino nullo - errore a regime er un ingreo a rama <

15 Il roeo è di tio zero, quindi e venie hiuo in retroazione unitaria reenterebbe errore al gradino finito e ari a: e k P.5.6 Verifihiamolo:.35 Ste Reone >> /2; >> wfeedbak, Tranfer funtion: >> tew Amlitude Time e

16 Per avere errore al gradino nullo è neeario he C*P ia di tio, er avere errore alla rama < è neeario he il guadagno di ia oortuno, la f.d.t. di C dovrà quindi eere del tio Ck/ Caloliamo k: e ram k > 2 k v k 2 2 k < C 2

17 >> 2/; >> l*; >> wfeedbakl, Tranfer funtion: ^2 2 2 >> tew >> figure >> t[:.:]; >> w,t,t Amlitude Amlitude Ste Reone Time e inear Simulation Reult Time e
![:]; >> w,t,t Amlitude Amlitude. 4.](/docs-images/43/620221/images/page_17.jpg "2. 8. 6. 4.")
18 Analii della tabilità Verifihiamo l effetto he ha l aggiunta di C ulla tabilità robuta del itema a ilo hiuo: Bode iagram Gm Inf, Pm Inf 4 Bode iagram Gm Inf db at Inf rad/e, Pm 65.5 deg at.9 rad/e Magnitude db Magnitude db Phae deg -45 Phae deg Frequeny rad/e margin -8-2 Frequeny rad/e margin*

19 yquit iagram 8 yquit iagram Imaginary Axi Real Axi Imaginary Axi Real Axi nyquit nyquit*

20 Analii in frequenza del itema a ilo hiuo >> wfeedbak, Tranfer funtion: >> w2feedbak*, Tranfer funtion: ^2 2 2 >> bodew,w2 Con l inerimento di C: - Si nota he la w2 ha modulo db alle bae frequenze, garantendo un buon ineguimento a regime er egnali inuoidali di ulazione inferiore alla banda aante - Si ha una riduzione della banda aante Magnitude db Phae deg B ode iagram -2-2 F requ en y rad / e w w2

21 Analii tramite luogo delle radii Root ou.8 Root ou Imagin ary Axi Sytem: untitled Gain:.748 Pole: -.74i aming:. 88 Overhoot %:.5 Frequeny rad/e: rlou Real Axi rlou* Real Axi Il itema a ilo hiuo ha emre una dinamia di rimo ordine Il itema a ilo hiuo al reere di k uò avere una dinamia di eondo ordine on: Taot T reente S% reente
22 eemio ato il roeo on f.d.t.: P 5 2 rogettare il omenatore tatio in modo da avere: - errore al gradino nullo - errore alla rama<.
23 Il roeo è di tio uno, quindi meo in retroazione unitaria ha già errore al gradino nullo ed errore alla rama finito e ari a: e ram > delle eifihe.4 Ste Reone inear Simulation Reult Amlitude.8.6 Amlitude Time e Time e
24 Si deve introdurre un ontrollore er aumentare oortunamente il guadagno: e ram.4 k > 4. C 4 5k 2 2 5k <.
25 .5 Ste Reone w w 9 inear Simulation Reult 8 7 Amlitude.5 Amlitude Time e >> wfeedbak,; >> wfeedbak4*,; >> tew,w Time e >> w,t,t >> hold Current lot held >> w,t,t Il itema è iù veloe a ovraelongazione è aumentata errore alla rama è diminuito
26 Analii in frequenza del itema a ilo aerto tabilità robuta 8 yquit iagram 6 Bode iagram Gm Inf db at Inf rad/e, Pm 25.2 deg at 4.25 rad/e Imaginary Axi Sytem: Real: -.25 Imag: 45 Frequeny rad/e: Magnitude db Phae deg Real Axi -8-2 Frequeny rad/e a ulazione di attraveramento è aumentata Il margine di fae è diminuito Il itema a ilo hiuo è omunque tabile
27 Analii in frequenza del itema a ilo hiuo 2 Bode iagram Magnitude db Phae deg w w bodew,w -8-2 Frequeny rad/e Sono aumentati modulo alla rionanza e banda aante
28 eemio ato il roeo on f.d.t.: P 5 2 rogettare il omenatore tatio in modo da avere: - errore al gradino nullo - errore alla rama<.
29 È lo teo del reedente ma deve eere: e ram.4 k > 4. C 4 5k 2 2 5k <. 2.8 Ste Reone Ste Reone Amlitude Time e Sitema a ilo hiuo enza omenatore tatio Amlitude Time e Sitema a ilo hiuo on omenatore tatio: È diventato intabile
30 Bode iagram Gm.58 db at.4 rad/e, Pm 5.2 deg at.29 rad/e 5 Bode iagram Gm -5.5 db at.4 rad/e, Pm deg at 2.5 rad/e Magnitude db Magnitude db Phae deg Frequeny rad/e Senza omenatore Phae deg Frequeny rad/e Con omenatore In queti ai è neeario introdurre, oltre al omenatore tatio, un altro omenatore he tabilizzi il itema a ilo hiuo enza modifiare guadagno E tio di
31 Errore a regime er diturbi anonii ulla atena diretta R - C P f Conideriamo un itema di ontrollo in retroazione u ui agie un diturbo additivo f ulla atena diretta Obiettivo del ontrollore è quello di rendere traurabile l azione del diturbo ull uita del itema ontrollato Ci ouiamo dell effetto a regime di diturbi otanti gradino o a rama
32 Agendo er ovraoizione degli effetti onideriamo nullo R e aloliamo la f.d.t. tra uita e diturbo P C Y f f a f.d.t ha lo teo denominatore della f.d.t. tra ingreo ed uita, e il itema è tabile er alolare l uita a regime quando agie il diturbo i uò uare Il teorema del valore finale y f f
33 Se il diturbo è un gradino ed il itema è di tio i ha: y f k quindi e i vuole he a regime il diturbo abbia una ara influenza ull uita i deve aumentare il guadagno di Analogamente a quanto vito reedentemente i ottiene he er annullare l uita er un diturbo a gradino è neeario avere un itema di tio o ueriore
34 Anhe er diturbi di tio rama valgono i riultati ottenuti reedentemente: itema di tio : uita a rama itema di tio : uita a gradino, inveramente roorzionale a kv itema di tio 2: uita nulla
35 Conideriamo ora un diturbo agente ull uita del ontrollore: R - C f P a f.d.t. tra uita e diturbo è: P Y f C P
36 P C P Y f f f f Conideriamo un diturbo a gradino e alihiamo il teorema del valore finale: y Se ia C he P ono di tio, l uita a regime ha un valore finito e non nullo y
37 Se P è di tio : ~ y Se C è di tio : ~ ~ y In generale: Per annullare l effetto di un diturbo a gradino è neeario he ia reente un olo nell origine nella f.d.t. del itema a monte del unto di ingreo del diturbo
Definizione delle specifiche per un sistema di controllo a retroazione unitaria
 Definizione delle pecifiche per un itema di controllo a retroazione unitaria Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento
Definizione delle pecifiche per un itema di controllo a retroazione unitaria Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento
Sintesi tramite il luogo delle radici
 Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Capitolo. Il comportamento dei sistemi di controllo in regime permanente. 6.1 Classificazione dei sistemi di controllo. 6.2 Errore statico: generalità
 Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Lezione 2. Campionamento e Aliasing. F. Previdi - Controlli Automatici - Lez. 2 1
 Lezione 2. Campionamento e Aliaing F. Previdi - Controlli Automatici - Lez. 2 1 Schema della lezione 1. Introduzione 2. Il campionatore ideale 3. Traformata di un egnale campionato 4. Teorema del campionamento
Lezione 2. Campionamento e Aliaing F. Previdi - Controlli Automatici - Lez. 2 1 Schema della lezione 1. Introduzione 2. Il campionatore ideale 3. Traformata di un egnale campionato 4. Teorema del campionamento
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
Descrizione generale di Spice
 Decrizione generale di Spice SPIE A/D (Simulation Program with Integrated ircuit Emphai Analog/Digital) Ppice è un imulatore circuitale di uo generale, prodotto dalla ADENE Il imulatore Spice è uno dei
Decrizione generale di Spice SPIE A/D (Simulation Program with Integrated ircuit Emphai Analog/Digital) Ppice è un imulatore circuitale di uo generale, prodotto dalla ADENE Il imulatore Spice è uno dei
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Errori di misura. è ragionevole assumere che una buona stima del valore vero sia la media
 Errori di miura Se lo trumento di miura è abbatanza enibile, la miura rietuta della tea grandezza fiica darà riultati diveri fra loro e fluttuanti in modo caratteritico. E l effetto di errori cauali, o
Errori di miura Se lo trumento di miura è abbatanza enibile, la miura rietuta della tea grandezza fiica darà riultati diveri fra loro e fluttuanti in modo caratteritico. E l effetto di errori cauali, o
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST
 ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
6.5. La compressione
 6.5. La comreione rofondimenti 6.5.1. I materiali iotroi Mentre alcuni materiali (come l acciaio) hanno un uguale comortamento a trazione e a comreione (ono cioè «materiali iotroi») altri (come le ghie,
6.5. La comreione rofondimenti 6.5.1. I materiali iotroi Mentre alcuni materiali (come l acciaio) hanno un uguale comortamento a trazione e a comreione (ono cioè «materiali iotroi») altri (come le ghie,
Lezione 12. Regolatori PID
 Lezione 1 Regolatori PD Legge di controllo PD Conideriamo un regolatore che eercita un azione di controllo dipendente dall errore attravero la eguente legge: t ut = K et K e d K de t P + τ τ+ D. dt La
Lezione 1 Regolatori PD Legge di controllo PD Conideriamo un regolatore che eercita un azione di controllo dipendente dall errore attravero la eguente legge: t ut = K et K e d K de t P + τ τ+ D. dt La
ERRORE STATICO. G (s) H(s) Y(s) E(s) X (s) YRET(s)
 H(s) Y(s) E(s) X (s) YRET(s)") Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Trasformata di Laplace ESEMPI DI MODELLIZZAZIONE
 Traformata di Laplace ESEMPI DI MODELLIZZAZIONE Introduzione La traformata di Laplace i utilizza nel momento in cui è tata individuata la funzione di traferimento La F.d.T è una equazione differenziale
Traformata di Laplace ESEMPI DI MODELLIZZAZIONE Introduzione La traformata di Laplace i utilizza nel momento in cui è tata individuata la funzione di traferimento La F.d.T è una equazione differenziale
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Fondamenti di Automatica per Ing. Elettrica
 Fondamenti di Automatica per Ing. Elettrica Prof. Patrizio Colaneri 2 Seconda prova in itinere del 22 Gennaio 28 Cognome Nome Matricola Firma Durante la prova non è conentita la conultazione di libri,
Fondamenti di Automatica per Ing. Elettrica Prof. Patrizio Colaneri 2 Seconda prova in itinere del 22 Gennaio 28 Cognome Nome Matricola Firma Durante la prova non è conentita la conultazione di libri,
ELETTRONICA ANALOGICA INDUSTRIALE PARTE 4. Retroazione
 Retroazione Eetto della retroazione ul guadagno Riduzione della ditorione Impedenze di ingreo e di ucita Reti di retroazione Ripota in requenza Eetto della retroazione ui poli Margini di guadagno e di
Retroazione Eetto della retroazione ul guadagno Riduzione della ditorione Impedenze di ingreo e di ucita Reti di retroazione Ripota in requenza Eetto della retroazione ui poli Margini di guadagno e di
Esercitazione di Controlli Automatici 1 n 2. a.a. 2006/07
 6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Messa a punto avanzata più semplice utilizzando Funzione Load Observer
 Mea a punto avanzata più emplice utilizzando Funzione Load Oberver EMEA Speed & Poition CE Team AUL 34 Copyright 0 Rockwell Automation, Inc. All right reerved. Co è l inerzia? Tutti comprendiamo il concetto
Mea a punto avanzata più emplice utilizzando Funzione Load Oberver EMEA Speed & Poition CE Team AUL 34 Copyright 0 Rockwell Automation, Inc. All right reerved. Co è l inerzia? Tutti comprendiamo il concetto
1. (solo nuovo ordinamento e diploma) Dato il sistema di controllo raffigurato, con
 Dato il sistema di controllo raffigurato, con") Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
3. Catene di Misura e Funzioni di Trasferimento
 3.. Generalità 3. Catene di Miura e Funzioni di Traferimento 3.. Generalità Il egnale che rappreenta la grandezza da miurare viene trattato in modo da poter eprimere quet ultima con uno o più valori numerici
3.. Generalità 3. Catene di Miura e Funzioni di Traferimento 3.. Generalità Il egnale che rappreenta la grandezza da miurare viene trattato in modo da poter eprimere quet ultima con uno o più valori numerici
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 21 NOVEMBRE d 2 (t) r(t) e(t) y(t) C(s)G(s)
 r(t) e(t) y(t) C(s)G(s)") ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Capitolo IV L n-polo
 Capitolo IV L n-polo Abbiamo oervato che una qualiai rete, vita da due nodi, diventa, a tutti gli effetti eterni, un bipolo unico e queto è in qualche miura ovvio e abbiamo anche motrato come cotruire
Capitolo IV L n-polo Abbiamo oervato che una qualiai rete, vita da due nodi, diventa, a tutti gli effetti eterni, un bipolo unico e queto è in qualche miura ovvio e abbiamo anche motrato come cotruire
CONTROLLORI STANDARD PID. Guido Vagliasindi Controlli Automatici A.A. 06/07 Controllori Standard PID
 ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Soluzione esami di stato Il sistema di controllo può essere rappresentato mediante il seguente schema a blocchi : G t (s)
") Soluzione esami di stato 213 Sistemi automazione e organizzazione della roduzione Il sistema di controllo uò essere raresentato mediante il seguente schema a blocchi : K G com ( G s Cond. G t ( Dove :
Soluzione esami di stato 213 Sistemi automazione e organizzazione della roduzione Il sistema di controllo uò essere raresentato mediante il seguente schema a blocchi : K G com ( G s Cond. G t ( Dove :
Corso di Microonde II
 POITECNICO DI MIANO Coro di Microonde II ezi n. 3: Generalità ugli amplificatori ineari Coro di aurea pecialitica in Ingegneria delle Telecomunicazi Circuiti attivi a microonde (Amplificatori) V in Z g
POITECNICO DI MIANO Coro di Microonde II ezi n. 3: Generalità ugli amplificatori ineari Coro di aurea pecialitica in Ingegneria delle Telecomunicazi Circuiti attivi a microonde (Amplificatori) V in Z g
La macchina a ciclo Rankine
 Lezione XIV - 7/0/00 ora 8:0-0:0 - Maine a vapore, ilo Rankine ed eerizi - Originale di Amoretti Miele. La maina a ilo Rankine Il problema di realizzare un ilo termodinamio e produa la maima uantità di
Lezione XIV - 7/0/00 ora 8:0-0:0 - Maine a vapore, ilo Rankine ed eerizi - Originale di Amoretti Miele. La maina a ilo Rankine Il problema di realizzare un ilo termodinamio e produa la maima uantità di
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 2014
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
Esercitazione di Controlli Automatici 1 n 6
 4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Esame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento) 16 Giugno 2008 (Bozza di soluzione)
 16 Giugno 2008 (Bozza di soluzione)") Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
4. Reti correttrici e regolatori industriali. 4.1 Regolatori industriali. 4.1.1 Regolatore ad azione proporzionale P
 4. Reti correttrici e regolatori industriali Un sistema di controllo ad anello chiuso deve soddisfare le secifiche assegnate nel dominio della frequenza e quelle assegnate nel dominio del temo. Queste
4. Reti correttrici e regolatori industriali Un sistema di controllo ad anello chiuso deve soddisfare le secifiche assegnate nel dominio della frequenza e quelle assegnate nel dominio del temo. Queste
Corso Tecnologie dei Sistemi di Controllo. Controllo PID
 Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
d y d u + u y des C(s) F(s) Esercizio 1 Si consideri lo schema di controllo riportato in figura:
 F(s) Esercizio 1 Si consideri lo schema di controllo riportato in figura:") Eercizio Si conideri lo chema di controllo riportato in figura: y de e C() d u u F() d y y Applicando le regole di algebra dei blocchi, calcolare le eguenti funzioni di traferimento: y() a) W y,dy() =
Eercizio Si conideri lo chema di controllo riportato in figura: y de e C() d u u F() d y y Applicando le regole di algebra dei blocchi, calcolare le eguenti funzioni di traferimento: y() a) W y,dy() =
Alessandro Scopelliti. Università di Reggio Calabria e University of Warwick. alessandro.scopelliti@unirc.it
 Aleandro Scoelliti Univerità di Reggio Calabria e Univerity of Warwick aleandro.coelliti@unirc.it Selezione avvera La elezione avvera è il fenomeno er cui, in un mercato caratterizzato da informazione
Aleandro Scoelliti Univerità di Reggio Calabria e Univerity of Warwick aleandro.coelliti@unirc.it Selezione avvera La elezione avvera è il fenomeno er cui, in un mercato caratterizzato da informazione
Il progetto allo SLU per la flessione semplice e composta
 Il progetto allo SLU per la leione emplie e ompota Nomenlatura σ R h y.n. σ 0,8y b σ T /0 Ipotei i bae onervazione elle ezioni piane La eormazione in ogni punto ella ezione è proporzionale alla itanza
Il progetto allo SLU per la leione emplie e ompota Nomenlatura σ R h y.n. σ 0,8y b σ T /0 Ipotei i bae onervazione elle ezioni piane La eormazione in ogni punto ella ezione è proporzionale alla itanza
0.24. Progettare un regolatore che soddisfi le seguenti specifiche, minimizzando le code di assestamento: Errore a regime=10% ω c =1rad/s Mf=40 o
 .4 ( s+.) ( s+ ) Dato l impianto Gs () = Progettare un regolatore he soddisfi le seguenti speifihe, minimizzando le ode di assestamento: Errore a regime=1% ω =1rad/s Mf=4 o 1 Magnitude (db) Phase (deg)
.4 ( s+.) ( s+ ) Dato l impianto Gs () = Progettare un regolatore he soddisfi le seguenti speifihe, minimizzando le ode di assestamento: Errore a regime=1% ω =1rad/s Mf=4 o 1 Magnitude (db) Phase (deg)
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I
 SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof Bittanti, BIO A-K) Settembre Si conideri il eguente itema dinamico a tempo continuo decritto mediante chema a blocchi: ut () _ yt () 9 a Si calcoli la funione
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof Bittanti, BIO A-K) Settembre Si conideri il eguente itema dinamico a tempo continuo decritto mediante chema a blocchi: ut () _ yt () 9 a Si calcoli la funione
Considerazioni sulle specifiche.
 # SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
# SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
Regolazione e Controllo dei Sistemi Meccanici Figura 1: Schema di un montacarichi.
 Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
CORSO DI ORDINAMENTO. Tema di: SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE
 Sessione ordinaria 211 Seconda prova scritta M48 - ESAME DI STATO DI ISTITUTO PROFESSIONALE ORSO DI ORDINAMENTO Indirizzo: TENIO DELLE INDUSTRIE ELETTRIHE Tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE
Sessione ordinaria 211 Seconda prova scritta M48 - ESAME DI STATO DI ISTITUTO PROFESSIONALE ORSO DI ORDINAMENTO Indirizzo: TENIO DELLE INDUSTRIE ELETTRIHE Tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE
Sistemi di Regolazione
 Sitemi di Regolazione (vedi Marro Par. 6.9) (Vedi anche e. realizzati in Working Model 2D ed il file PD2.vi realizzato con LabView) Regolatori tandard Metodo di Ziegler - Nichol 3/9/2 G.U -FdA- U() = cotante
Sitemi di Regolazione (vedi Marro Par. 6.9) (Vedi anche e. realizzati in Working Model 2D ed il file PD2.vi realizzato con LabView) Regolatori tandard Metodo di Ziegler - Nichol 3/9/2 G.U -FdA- U() = cotante
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Fondamenti di Automatica - I Parte Il progetto del controllore
 Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica
 Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Antitrasformata di Laplace PROCEDIMENTI DI ANTITRASFORMAZIONE
 Antitrasformata di Laplace PROCEDIMENTI DI ANTITRASFORMAZIONE") PROCEDIMENTI DI ANTITRASFORMAZIONE L'operazione di paaggio invero dal dominio della frequenza complea al dominio del tempo F() f(t) è detta antitraformata o traformazione invera di Laplace. Data una funzione
PROCEDIMENTI DI ANTITRASFORMAZIONE L'operazione di paaggio invero dal dominio della frequenza complea al dominio del tempo F() f(t) è detta antitraformata o traformazione invera di Laplace. Data una funzione
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof. Bittanti, BIO A-K) 27 Gennaio 2009
 27 Gennaio 2009") SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof. Bittanti, BIO A-K) 7 Gennaio 9. Si onideri il eguente itema dinamio lineare a tempo ontinuo: x () t = x() t 5 x() t u() t x () t = x() t x() t x 3() t = x()
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof. Bittanti, BIO A-K) 7 Gennaio 9. Si onideri il eguente itema dinamio lineare a tempo ontinuo: x () t = x() t 5 x() t u() t x () t = x() t x() t x 3() t = x()
Corso di Macchine Elettriche, Indirizzo Professionalizzante AA 2010 2011 I Appello 12 luglio 2011 TEMA A
 Coro di Macchine Elettriche, Indirizzo Profeionalizzante AA I Aello luglio Eercizio. TEMA A Un motore ad induzione trifae a 4 oli reenta i eguenti dati nominali tenione Vn = 4 V frequenza fn = 5 Hz Potenza
Coro di Macchine Elettriche, Indirizzo Profeionalizzante AA I Aello luglio Eercizio. TEMA A Un motore ad induzione trifae a 4 oli reenta i eguenti dati nominali tenione Vn = 4 V frequenza fn = 5 Hz Potenza
Introduzione a Matlab/Simulink
 Introduzione a Matlab/Simulink Robotica Indutriale Prof. P. Rocco a.a.2003/2004 Ing. M. Gritti e Ing. L. Bacetta Introduzione a Matlab Contenuti Preentazione Control Sytem Toolbox Introduzione a Simulink
Introduzione a Matlab/Simulink Robotica Indutriale Prof. P. Rocco a.a.2003/2004 Ing. M. Gritti e Ing. L. Bacetta Introduzione a Matlab Contenuti Preentazione Control Sytem Toolbox Introduzione a Simulink
5 Secondo principio della termodinamica... 2 5.1 Motori termici... 2 5.1.1 Rendimenti termici... 3 5.2 Secondo principio della termodinamica secondo
 5 eondo rno della termodnama... 5. Motor term... 5.. Rendment term... 3 5. eondo rno della termodnama eondo Ke-Plan... 4 5.3 Mahne frgorfere... 4 5.3. Coeffente d retazone (COP... 4 5.4 Pome d alore...
5 eondo rno della termodnama... 5. Motor term... 5.. Rendment term... 3 5. eondo rno della termodnama eondo Ke-Plan... 4 5.3 Mahne frgorfere... 4 5.3. Coeffente d retazone (COP... 4 5.4 Pome d alore...
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Slide del corso di. Controllo digitale
 Slide del coro di Controllo digitale Coro di Laurea in Ingegneria Informatica e dell Informazione Univerità di Siena, Dip. Ing. dell Informazione e Sc. Matematiche Parte III Sitemi a dati campionati Gianni
Slide del coro di Controllo digitale Coro di Laurea in Ingegneria Informatica e dell Informazione Univerità di Siena, Dip. Ing. dell Informazione e Sc. Matematiche Parte III Sitemi a dati campionati Gianni
I sistemi retroazionati. Per lo studio si può utilizzarne uno a reazione unitaria per rendere standard i risultati:
 I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Comportamento a regime dei sistemi di controllo in retroazione Appunti di Controlli Automatici
 Comportamento a regime dei sistemi di controllo in retroazione Appunti di Controlli Automatici Versione 1.0 Ing. Alessandro Pisano SOMMARIO Introduzione 3 1. Stabilità a ciclo chiuso e teorema del valore
Comportamento a regime dei sistemi di controllo in retroazione Appunti di Controlli Automatici Versione 1.0 Ing. Alessandro Pisano SOMMARIO Introduzione 3 1. Stabilità a ciclo chiuso e teorema del valore
Controllore Processo. Le principali componenti del sistema sono: il rivelatore di errore, il controllore che ha il compito di trasformare il segnale
 CONTROLLORI DI TIO ID rincipi di funzionamento Il termine controllo definice l azione volta per portare e mantenere ad un valore prefiato un parametro fiico di un impianto o di un proceo (ad eempio, la
CONTROLLORI DI TIO ID rincipi di funzionamento Il termine controllo definice l azione volta per portare e mantenere ad un valore prefiato un parametro fiico di un impianto o di un proceo (ad eempio, la
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
Bode Diagram. 1.2 Determinare il valore del guadagno del sistema. Disegnare gli zeri ed i poli nel piano complesso.
 5 Luglio 3 econda prova Sia dato un itema dinamico con funzione di traferimento G(), i cui diagrammi di Bode, del modulo e della fae, ono di eguito rappreentati: 6 Bode Diagram Phae (deg) Magnitude (db)
5 Luglio 3 econda prova Sia dato un itema dinamico con funzione di traferimento G(), i cui diagrammi di Bode, del modulo e della fae, ono di eguito rappreentati: 6 Bode Diagram Phae (deg) Magnitude (db)
1 = (parabola unitaria) si determini l errore di regolazione a regime:
 si determini l errore di regolazione a regime:") A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
2 I METODI DI ANALISI DEI SISTEMI DI CONTROLLO AD ANELLO CHIUSO LINEARI 12
 COSO DI SISTEMI Sommario 1 I SISTEMI DI CONTOLLO...4 1.1 Introduzione...4 1.1.1 Sitemi di controllo ad anello aperto...5 1.1.2 Sitemi di controllo a previione...7 1.1.3 Sitemi di controllo ad anello chiuo
COSO DI SISTEMI Sommario 1 I SISTEMI DI CONTOLLO...4 1.1 Introduzione...4 1.1.1 Sitemi di controllo ad anello aperto...5 1.1.2 Sitemi di controllo a previione...7 1.1.3 Sitemi di controllo ad anello chiuo
B6a - Presentazione della lezione B6. 1/5- Obiettivi
 B6a - Preentazione della lezione B6 /5- Obiettivi onoere le aturazioni di livello dell amplifiatore e aper prevedere la loro influenza ui egnali onoere gli offet dell amplifiatore e aper prevedere la loro
B6a - Preentazione della lezione B6 /5- Obiettivi onoere le aturazioni di livello dell amplifiatore e aper prevedere la loro influenza ui egnali onoere gli offet dell amplifiatore e aper prevedere la loro
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
Esercizio no.1 soluzione a pag.3
 Edutenia.it Modulazioni digitali eserizi risolti 1 Eserizio no.1 soluzione a pag.3 Quanti bit sono neessari per trasmettere 3 simboli e quale è la veloità di modulazione e la veloità di trasmissione se
Edutenia.it Modulazioni digitali eserizi risolti 1 Eserizio no.1 soluzione a pag.3 Quanti bit sono neessari per trasmettere 3 simboli e quale è la veloità di modulazione e la veloità di trasmissione se
Sistemi di Controllo - Controlli Automatici (Parte B) Ingegneria Meccanica e Ingegneria del Veicolo
 Ingegneria Meccanica e Ingegneria del Veicolo") Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati
 Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
K c s h. P(s) 1/K d. U(s) + Y(s)
 1/K d. U(s) + Y(s)") Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Capitolo. Il comportamento dei sistemi in regime transitorio. 5.8 Esercizi - Risposta al gradino dei sistemi del 2 ordine reazionati e non reazionati
 Capitolo 5 Il comportameto dei itemi i regime traitorio 5.1 Geeralità ulla ripota dei itemi el domiio del tempo 5. Ripota al gradio di u itema del primo ordie. 5.3 Eercizi - Ripota al gradio dei itemi
Capitolo 5 Il comportameto dei itemi i regime traitorio 5.1 Geeralità ulla ripota dei itemi el domiio del tempo 5. Ripota al gradio di u itema del primo ordie. 5.3 Eercizi - Ripota al gradio dei itemi
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Pertanto la funzione di trasferimento complessiva in catena aperta (open-loop) W(S) del sistema di controllo sarà data da:
 W(S) del sistema di controllo sarà data da:") M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
Controlli automatici
 Controlli automatici Proetto del controllore nel dominio della frequenza Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioineneria Introduzione
Controlli automatici Proetto del controllore nel dominio della frequenza Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioineneria Introduzione
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Elettronica delle Telecomunicazioni Esercizi cap 2: Circuiti con Ampl. Oper. 2.1 Analisi di amplificatore AC con Amplificatore Operazionale reale
 2. Analisi di amplificatore AC con Amplificatore Operazionale reale Un amplificatore è realizzato con un LM74, con Ad = 00 db, polo di Ad a 0 Hz. La controreazione determina un guadagno ideale pari a 00.
2. Analisi di amplificatore AC con Amplificatore Operazionale reale Un amplificatore è realizzato con un LM74, con Ad = 00 db, polo di Ad a 0 Hz. La controreazione determina un guadagno ideale pari a 00.
SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei sistemi in retroazione
 SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei itemi in retroazione R E C G + - Y H G rappreenta il regolatore, l'amplificatore di potenza, l'attuatore ed il itema controllato e prende il
SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei itemi in retroazione R E C G + - Y H G rappreenta il regolatore, l'amplificatore di potenza, l'attuatore ed il itema controllato e prende il
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Controlli Automatici prof. M. Indri Sistemi di controllo digitali
 Controlli Automatici prof. M. Indri Sistemi di controllo digitali Schema di controllo base r(t) + e(t) {e k } {u k } u(t) Campionatore (A/D) Controllore digitale Ricostruttore (D/A) Sistema (tempo cont.)
Controlli Automatici prof. M. Indri Sistemi di controllo digitali Schema di controllo base r(t) + e(t) {e k } {u k } u(t) Campionatore (A/D) Controllore digitale Ricostruttore (D/A) Sistema (tempo cont.)
Controlli Automatici (AUT) - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a
 - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a") Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
ẋ 2 = x 1 10x u y = x 1 + x 2 [
 Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
Regime Permanente. (vedi Vitelli-Petternella par. VI.1,VI.1.1,VI.2)
") Regme Permanente (ve Vtell-Petternella par. VI.,VI..,VI.) Comportamento a regme permanente Clafcazone n tp Conzon a Cclo Chuo Conzon a Cclo Aperto Rpota a Regme per Dturb Cotant Dturbo ulla mura Rpota
Regme Permanente (ve Vtell-Petternella par. VI.,VI..,VI.) Comportamento a regme permanente Clafcazone n tp Conzon a Cclo Chuo Conzon a Cclo Aperto Rpota a Regme per Dturb Cotant Dturbo ulla mura Rpota
SPECIFICHE DI UN SISTEMA IN ANELLO CHIUSO
 SPECIFICHE DI UN SISTEMA IN ANELLO CHIUSO Consideriamo il classico esempio di compensazione in cascata riportato in figura, comprendente il plant o sistema controllato con funzione di trasferimento G P
SPECIFICHE DI UN SISTEMA IN ANELLO CHIUSO Consideriamo il classico esempio di compensazione in cascata riportato in figura, comprendente il plant o sistema controllato con funzione di trasferimento G P
Schematizzando, le operazioni che permettono di effettuare l apertura dell Iva sono, in sequenza:
 Documentazione KING Apertura Iva annuale e riporto del credito Milano, li 03/12/2008 Nel seguito Le indichiamo le operazioni da effettuare per una corretta apertura dell Iva annuale e del riporto del credito
Documentazione KING Apertura Iva annuale e riporto del credito Milano, li 03/12/2008 Nel seguito Le indichiamo le operazioni da effettuare per una corretta apertura dell Iva annuale e del riporto del credito
Fondamenti di Automatica Figura 1: Schema di centrifuga industriale: a) vista in assonometria b) vista frontale.
 vista in assonometria b) vista frontale.") Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Lezioni di Ricerca Operativa 2 Dott. F. Carrabs
 Lezioni di Ricerca Operativa Dott. F. Carrab.. 009/00 Lezione in Laboratorio: - Eercizi di modellazione Lezione 7: Eempio: Invetimenti Un cliente affida ad un aenzia finanziaria un milione di euro da impieare
Lezioni di Ricerca Operativa Dott. F. Carrab.. 009/00 Lezione in Laboratorio: - Eercizi di modellazione Lezione 7: Eempio: Invetimenti Un cliente affida ad un aenzia finanziaria un milione di euro da impieare
CONTROLLI AUTOMATICI Ingegneria Gestionale RETI CORRETTRICI
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Federica Grossi Tel. 59 256333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Federica Grossi Tel. 59 256333 e-mail: federica.grossi@unimore.it
Lezione 11. Equilibrio dei mercati del credito e della moneta bancaria. domanda di credito delle imprese = offerta delle banche;
 Lezione 11. Equilibrio dei mercati del credito e della moneta bancaria L E d = L domanda di credito delle impree = offerta delle banche; M d H = M M domanda di moneta (legale e bancaria) delle famiglie
Lezione 11. Equilibrio dei mercati del credito e della moneta bancaria L E d = L domanda di credito delle impree = offerta delle banche; M d H = M M domanda di moneta (legale e bancaria) delle famiglie