Controllo Predittivo (cenni)
|
|
|
- Flaviana Palla
- 8 anni fa
- Visualizzazioni
Transcript
1 Controllo Predittivo (cenni) Controllo Digitale - A. Bemporad - A.a. 2007/08 Optimizer Model Predictive Control Plant Reference r(t) Input u(t) Output y(t) Measurements MODEL: è richiesto un modello del processo da controllare per prevedere il comportamento futuro del processo stesso PREDICTIVE: l ottimizzazione è basata sull evoluzione futura del processo (predetta tramite il modello) CONTROL: serve per il controllo di complessi sistemi vincolati, con molti ingressi e molte uscite
 Input u(t) Output y(t) Measurements MODEL: è richiesto un")
2 Al tempo t: Si risolve un problema di controllo ottimo su un orizzonte futuro di p passi: minimizza Filosofia Receding Horizon r(t) Predicted outputs u(t+k) Manipulated Inputs t t+1 t+p soggetto ai vincoli t+1 t+2 t+p+1 Si applica soltanto la prima della sequenza ottima di mosse: Ottenute nuove misure, si ripete l ottimizzazione al tempo t+1 Vantaggio dell ottimizzazione in linea: FEEDBACK! MPC is like playing chess! Receding Horizon - Esempi MPC and investing money

3 Present Industrial Practice linear impulse/step response models sum of squared errors objective function executed in supervisory mode Particularly suited for problems with many inputs and outputs constraints on inputs, outputs, states varying objectives and limits on variables (e.g. because of faults) MPC nell industria History: 1979 Dynamic Matrix Control (DMC) by Shell (Motivation: multivariable, constrained) Controllo ottimo LQ non vincolato Modello lineare: Obiettivo: trova la sequenza che minimizza è la sequenza di ingressi che porta lo stato verso l origine x=0 in maniera ottima
 MPC nell industria History: 1979 Dynamic Matrix Control (DMC) by Shell (Motivation: multivariable, constrained) Controllo ottimo")
4 Controllo ottimo LQ non vincolato Si è visto che il problema di controllo ottimo LQ può essere riscritto come L ottimo viene ottenuto azzerando il gradiente: (questo metodo è conosciuto anche come batch least squares ) Alternativa: trovare la soluzione ottima utilizzando le iterazioni di Riccati (programmazione dinamica) Modello lineare: MPC Lineare Vincoli: Problema di controllo ottimo (con indice di prestazione quadratico):
 Modello lineare: MPC Lineare Vincoli: Problema di controllo ottimo (con indice di prestazione")
5 MPC Lineare Sostituzione: Problema di ottimizzazione: Convex QUADRATIC PROGRAM (QP) (quadratico) (lineare) past Risolvi il problema QP future t t+1 Predicted outputs Manipulated Inputs u(t+k) Al tempo t: Misura o stima lo stato corrente x(t) y(t+k t) t+n Algoritmo MPC e sia U={u * (0),...,u * (N-1)} la soluzione (=controllo ottimo vincolato ad anello aperto su orizzonte finito) Applica soltanto ottimi futuri rimanenti Vai al tempo t+1 al processo e scarta gli ingressi
} la soluzione (=controllo ottimo vincolato ad anello aperto su orizzonte finito) Applica soltanto ottimi")
6 Formulazione incrementale per tracking Obiettivo: portare l uscita y(t) sul valore di riferimento r(t) Idea: parametrizzare il problema mediante gli incrementi dell ingresso Modello lineare: Predizione: MPC Lineare - Tracking Problema di controllo ottimo (indice di prestazione quadratico) Problema di ottimizzazione Convex QUADRATIC PROGRAM (QP)
 Problema di ottimizzazione Convex QUADRATIC")
7 MPC Lineare - Esempio Processo: Modello: Indice di prestazione: Prestazioni ad anello chiuso: Vincolo: 0.8 u(t) 1.2 (saturazione dell ingresso) MPC Lineare - Esempio Vincolo: -0.2 u(t) 0.2 (slew-rate)
 MPC Lineare -")
8 Azione anticipativa I campioni futuri del riferimento sono (parzialmente) noti in anticipo: I campioni futuri del riferimento non sono noti in anticipo (il controllore è causale): MPC vs. Controllo Convenzionale Per sistemi singolo ingresso/singola uscita con vincoli di saturazione: si possono ottenere prestazioni del tutto equivalenti utilizzando tecniche convenzionali più semplici (ad esempio PID + anti-windup) TUTTAVIA il controllo MPC permette (in linea di principio) una UNIFORMITÀ nell approcciare il problema di controllo (cioè la stessa tecnica si può applicare ad un range di problemi molto diversi), con conseguenti riduzione dei costi di progettazione del controllore.
 TUTTAVIA il controllo MPC permette (in linea di principio) una UNIFORMITÀ nell approcciare il problema di")
9 Caratteristiche del controllo MPC Controllo di sistemi multivariabili soggetti a vincoli, anche non quadrati (numero di ingressi numero di uscite) Compensazione ottima dei ritardi Azione anticipativa sul riferimento Azione integrale per l inseguimento di riferimenti costanti senza offset Prezzo da pagare: Carico computazionale in linea (programmazione quadratica) Per sistemi di piccole dimensioni e/o molto veloci, le tecniche convenzionali sono più appropriate (ad esempio PID + anti-windup) Nuove possibilità per l MPC: soluzioni esplicite lineari a tratti, che non richiedono più l ottimizzazione in linea Stabilità ad anello chiuso dell MPC Q=Q 0, R=R >0 Le proprietà di stabilità dipendono in maniera abbastanza complessa dai parametri dell MPC (N, Q, R, u min, u max, y min, y max ) È possibile scegliere i pesi del funzionale di costo e/o imporre dei vincoli in maniera da garantire la stabilità ad anello chiuso

10 Teorema di Stabilità (Keerthi and Gilbert, 1988)(Bemporad et al., 1994) Esempio: : AFTI-16 Modello linearizzato:
 Esempio: : AFTI-16")
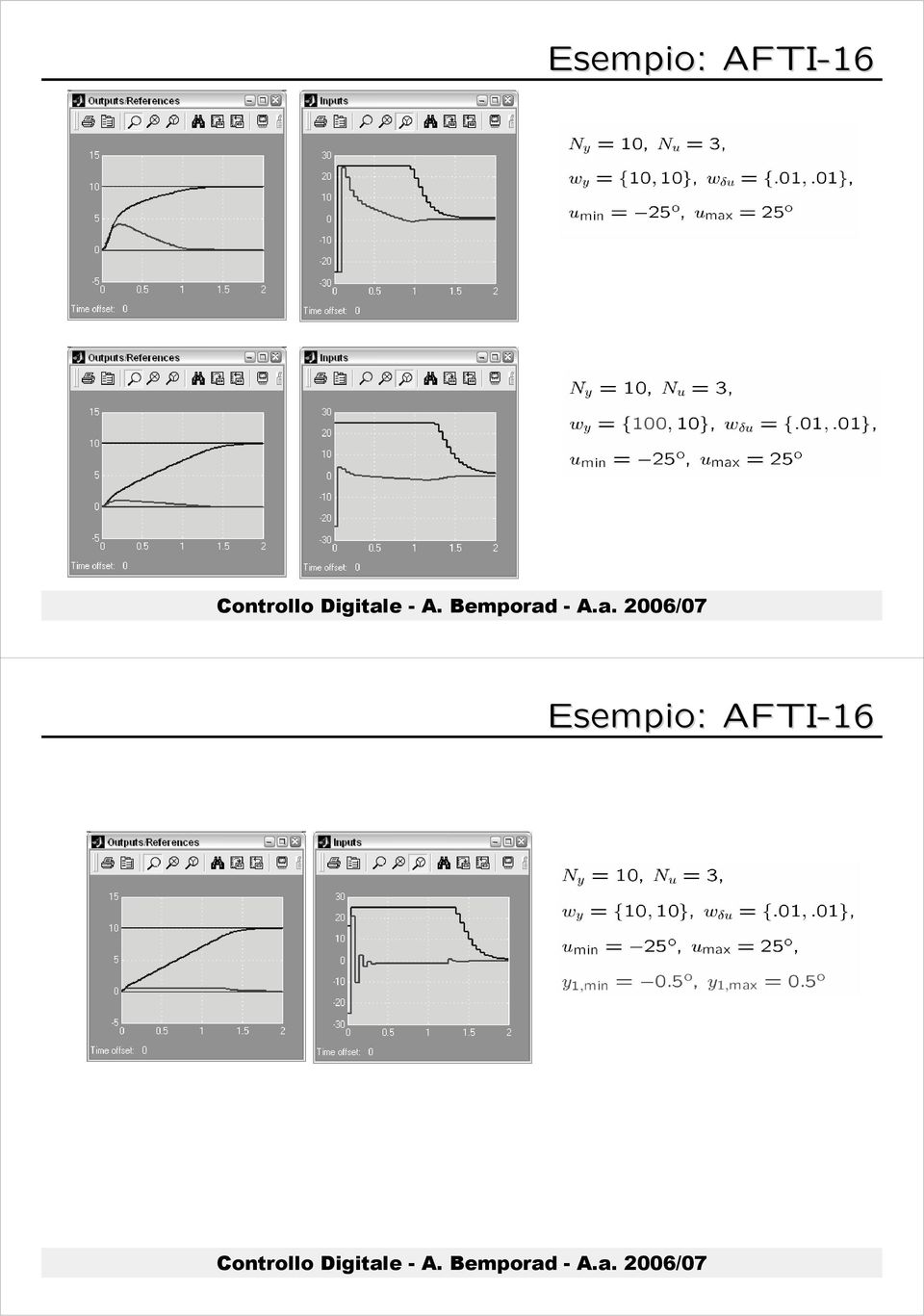
11 Esempio: : AFTI-16 Esempio: : AFTI-16
12 Criteri di tuning Pesi: maggiore è il rapporto W y /W u, più aggressivo è il controllore (come nel caso LQR) Orizzonte di controllo: maggiore è N u, maggiore è il numero di gradi di libertà che si ha a disposizione, quindi più ottimale la performance, ma maggiore è la complessità del controllore Orizzonte di predizione: più piccolo è N, più aggressivo è il controllore Vincoli sugli incrementi di ingresso: il controllore è meno aggressivo se u min, u max sono piccoli Cercare sempre di scegliere N u più piccolo possible! Model Predictive Control Toolbox MPC Toolbox 2.0 (Bemporad, Morari, Ricker, ): Object-oriented implementation (MPC object) MPC Simulink Library MPC Graphical User Interface RTW extension

13 MPC Graphical User Interface MPC Simulink Library Software e documentazione:

14 Model Predictive Control Maggiori dettagli sulle tecniche MPC: Corso di Controllo di Processo e dei Sistemi di Produzione (laurea specialistica)

MPC di sistemi non lineari output feedback and tracking
 MPC di sistemi non lineari output feedback and tracking Dipartimento di Informatica e Sistemistica Via Ferrata 1, 27100 Pavia Riccardo.Scattolini@unipv.it http://conpro.unipv.it/lab/ 1 Stato dell arte
MPC di sistemi non lineari output feedback and tracking Dipartimento di Informatica e Sistemistica Via Ferrata 1, 27100 Pavia Riccardo.Scattolini@unipv.it http://conpro.unipv.it/lab/ 1 Stato dell arte
Sistemi Operativi. Scheduling della CPU SCHEDULING DELLA CPU. Concetti di Base Criteri di Scheduling Algoritmi di Scheduling
 SCHEDULING DELLA CPU 5.1 Scheduling della CPU Concetti di Base Criteri di Scheduling Algoritmi di Scheduling FCFS, SJF, Round-Robin, A code multiple Scheduling in Multi-Processori Scheduling Real-Time
SCHEDULING DELLA CPU 5.1 Scheduling della CPU Concetti di Base Criteri di Scheduling Algoritmi di Scheduling FCFS, SJF, Round-Robin, A code multiple Scheduling in Multi-Processori Scheduling Real-Time
Sistemi Operativi SCHEDULING DELLA CPU. Sistemi Operativi. D. Talia - UNICAL 5.1
 SCHEDULING DELLA CPU 5.1 Scheduling della CPU Concetti di Base Criteri di Scheduling Algoritmi di Scheduling FCFS, SJF, Round-Robin, A code multiple Scheduling in Multi-Processori Scheduling Real-Time
SCHEDULING DELLA CPU 5.1 Scheduling della CPU Concetti di Base Criteri di Scheduling Algoritmi di Scheduling FCFS, SJF, Round-Robin, A code multiple Scheduling in Multi-Processori Scheduling Real-Time
e-dva - eni-depth Velocity Analysis
 Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
Computational Game Theory
 Computational Game Theory Vincenzo Bonifaci 24 maggio 2012 5 Regret Minimization Consideriamo uno scenario in cui un agente deve selezionare, più volte nel tempo, una decisione tra un insieme di N disponibili:
Computational Game Theory Vincenzo Bonifaci 24 maggio 2012 5 Regret Minimization Consideriamo uno scenario in cui un agente deve selezionare, più volte nel tempo, una decisione tra un insieme di N disponibili:
Capitolo 4: Ottimizzazione non lineare non vincolata parte II. E. Amaldi DEIB, Politecnico di Milano
 Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Ricerca Operativa Esercizi sul metodo del simplesso. Luigi De Giovanni, Laura Brentegani
 Ricerca Operativa Esercizi sul metodo del simplesso Luigi De Giovanni, Laura Brentegani 1 1) Risolvere il seguente problema di programmazione lineare. ma + + 3 s.t. 2 + + 2 + 2 + 3 5 2 + 2 + 6,, 0 Soluzione.
Ricerca Operativa Esercizi sul metodo del simplesso Luigi De Giovanni, Laura Brentegani 1 1) Risolvere il seguente problema di programmazione lineare. ma + + 3 s.t. 2 + + 2 + 2 + 3 5 2 + 2 + 6,, 0 Soluzione.
Ottimizzazione nella gestione dei progetti Capitolo 4: la gestione dei costi (Programmazione multimodale): formulazioni
: formulazioni") Ottimizzazione nella gestione dei progetti Capitolo 4: la gestione dei costi (Programmazione multimodale): formulazioni CARLO MANNINO Università di Roma La Sapienza Dipartimento di Informatica e Sistemistica
Ottimizzazione nella gestione dei progetti Capitolo 4: la gestione dei costi (Programmazione multimodale): formulazioni CARLO MANNINO Università di Roma La Sapienza Dipartimento di Informatica e Sistemistica
Esempio. Approssimazione con il criterio dei minimi quadrati. Esempio. Esempio. Risultati sperimentali. Interpolazione con spline cubica.
 Esempio Risultati sperimentali Approssimazione con il criterio dei minimi quadrati Esempio Interpolazione con spline cubica. Esempio 1 Come procedere? La natura del fenomeno suggerisce che una buona approssimazione
Esempio Risultati sperimentali Approssimazione con il criterio dei minimi quadrati Esempio Interpolazione con spline cubica. Esempio 1 Come procedere? La natura del fenomeno suggerisce che una buona approssimazione
INTRODUZIONE A EXCEL ESERCITAZIONE I
 1 INTRODUZIONE A EXCEL ESERCITAZIONE I Corso di Idrologia e Infrastrutture Idrauliche Prof. Roberto Guercio Cos è Excel 2 Foglio di calcolo o foglio elettronico è formato da: righe e colonne visualizzate
1 INTRODUZIONE A EXCEL ESERCITAZIONE I Corso di Idrologia e Infrastrutture Idrauliche Prof. Roberto Guercio Cos è Excel 2 Foglio di calcolo o foglio elettronico è formato da: righe e colonne visualizzate
Simulazione di guasto
 Simulazione di guasto Problemi e applicazioni Algoritmi Seriale Parallelo Deduttivo Concorrente Random Fault Sampling Sommario Problemi e Applicazioni Problema, dati: Un circuito Una sequenza di vettori
Simulazione di guasto Problemi e applicazioni Algoritmi Seriale Parallelo Deduttivo Concorrente Random Fault Sampling Sommario Problemi e Applicazioni Problema, dati: Un circuito Una sequenza di vettori
Ottimizzazione Multi Obiettivo
 Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
11. Evoluzione del Software
 11. Evoluzione del Software Andrea Polini Ingegneria del Software Corso di Laurea in Informatica (Ingegneria del Software) 11. Evoluzione del Software 1 / 21 Evoluzione del Software - generalità Cosa,
11. Evoluzione del Software Andrea Polini Ingegneria del Software Corso di Laurea in Informatica (Ingegneria del Software) 11. Evoluzione del Software 1 / 21 Evoluzione del Software - generalità Cosa,
I : tasso di inflazione indicatore della variazione. X : incremento della produttività. Y : particolari variazioni dei costi
 MECCANISMI DI REGOLAMENTAZIONE TARIFFARIA Due meccanismi principali Tasso di rendimento del capitale investito (RB-ROR) Tetto ai prezzi (Price Cap) Il meccanismo del tasso di rendimento (RB-ROR) Meccanismo
MECCANISMI DI REGOLAMENTAZIONE TARIFFARIA Due meccanismi principali Tasso di rendimento del capitale investito (RB-ROR) Tetto ai prezzi (Price Cap) Il meccanismo del tasso di rendimento (RB-ROR) Meccanismo
Metodi Stocastici per la Finanza
 Metodi Stocastici per la Finanza Tiziano Vargiolu vargiolu@math.unipd.it 1 1 Università degli Studi di Padova Anno Accademico 2011-2012 Lezione 6 Indice 1 Il metodo bootstrap 2 Esercitazione 3 Interpolazione
Metodi Stocastici per la Finanza Tiziano Vargiolu vargiolu@math.unipd.it 1 1 Università degli Studi di Padova Anno Accademico 2011-2012 Lezione 6 Indice 1 Il metodo bootstrap 2 Esercitazione 3 Interpolazione
Controllo Digitale - A. Bemporad - A.a. 2008/09
 D 1001 A Conversione D/A Attuatori Sensori 1001 D A Conversione A/D Processo Unità di controllo u(t) y(t) Attuatori Sensori G(s) Processo C(s)? Unità di controllo u(k) D 1001 A Conversione D/A Attuatori
D 1001 A Conversione D/A Attuatori Sensori 1001 D A Conversione A/D Processo Unità di controllo u(t) y(t) Attuatori Sensori G(s) Processo C(s)? Unità di controllo u(k) D 1001 A Conversione D/A Attuatori
(a cura di Francesca Godioli)
") lezione n. 12 (a cura di Francesca Godioli) Ad ogni categoria della variabile qualitativa si può assegnare un valore numerico che viene chiamato SCORE. Passare dalla variabile qualitativa X2 a dei valori
lezione n. 12 (a cura di Francesca Godioli) Ad ogni categoria della variabile qualitativa si può assegnare un valore numerico che viene chiamato SCORE. Passare dalla variabile qualitativa X2 a dei valori
Regressione non lineare con un modello neurale feedforward
 Reti Neurali Artificiali per lo studio del mercato Università degli studi di Brescia - Dipartimento di metodi quantitativi Marco Sandri (sandri.marco@gmail.com) Regressione non lineare con un modello neurale
Reti Neurali Artificiali per lo studio del mercato Università degli studi di Brescia - Dipartimento di metodi quantitativi Marco Sandri (sandri.marco@gmail.com) Regressione non lineare con un modello neurale
Stimare il WCET Metodo classico e applicazione di un algoritmo genetico
 Stimare il WCET Metodo classico e applicazione di un algoritmo genetico Sommario Introduzione Definizione di WCET Importanza del WCET Panoramica dei classici metodi per calcolare il WCET [1] Utilizzo di
Stimare il WCET Metodo classico e applicazione di un algoritmo genetico Sommario Introduzione Definizione di WCET Importanza del WCET Panoramica dei classici metodi per calcolare il WCET [1] Utilizzo di
Quadratic assignment Problem: The Hospital Layout
 Università degli Studi di Modena e Reggio Emilia Corso di Laurea Magistrale in Ingegneria Gestionale Metodi di ottimizzazione per la logistica e la produzione Quadratic assignment Problem: The Hospital
Università degli Studi di Modena e Reggio Emilia Corso di Laurea Magistrale in Ingegneria Gestionale Metodi di ottimizzazione per la logistica e la produzione Quadratic assignment Problem: The Hospital
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1
![2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1](/thumbs/25/5899888.jpg "2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1") 1 PORTAFOGLIO Portafoglio Markowitz (2 titoli) (rischiosi) due titoli rendimento/varianza ( μ 1, σ 1 ), ( μ 2, σ 2 ) Si suppone μ 1 > μ 2, σ 1 > σ 2 portafoglio con pesi w 1, w 2 w 1 = w, w 2 = 1- w 1
1 PORTAFOGLIO Portafoglio Markowitz (2 titoli) (rischiosi) due titoli rendimento/varianza ( μ 1, σ 1 ), ( μ 2, σ 2 ) Si suppone μ 1 > μ 2, σ 1 > σ 2 portafoglio con pesi w 1, w 2 w 1 = w, w 2 = 1- w 1
METODI per effettuare previsioni con analisi di tipo WHAT-IF
 METODI per effettuare previsioni con analisi di tipo WHAT-IF 1. TABELLA DATI Una tabella di dati è un intervallo che mostra come la modifica di alcuni valori nelle formule ne influenza i risultati. Le
METODI per effettuare previsioni con analisi di tipo WHAT-IF 1. TABELLA DATI Una tabella di dati è un intervallo che mostra come la modifica di alcuni valori nelle formule ne influenza i risultati. Le
Proportion-Air, Inc. Controllo della temperatura ad anello chiuso utilizzando la pressione del vapore saturo
 Proportion-Air, Inc. Controllo della temperatura ad anello chiuso utilizzando la pressione del vapore saturo Benefici della regolazione elettronica del vapore ad anello chiuso Vs. valvole a modulazione
Proportion-Air, Inc. Controllo della temperatura ad anello chiuso utilizzando la pressione del vapore saturo Benefici della regolazione elettronica del vapore ad anello chiuso Vs. valvole a modulazione
12. Evoluzione del Software
 12. Evoluzione del Software Andrea Polini Ingegneria del Software Corso di Laurea in Informatica (Ingegneria del Software) 12. Evoluzione del Software 1 / 21 Evoluzione del Software - generalità Cosa,
12. Evoluzione del Software Andrea Polini Ingegneria del Software Corso di Laurea in Informatica (Ingegneria del Software) 12. Evoluzione del Software 1 / 21 Evoluzione del Software - generalità Cosa,
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Il Metodo Branch and Bound
 Il Laura Galli Dipartimento di Informatica Largo B. Pontecorvo 3, 56127 Pisa laura.galli@unipi.it http://www.di.unipi.it/~galli 4 Novembre 2014 Ricerca Operativa 2 Laurea Magistrale in Ingegneria Gestionale
Il Laura Galli Dipartimento di Informatica Largo B. Pontecorvo 3, 56127 Pisa laura.galli@unipi.it http://www.di.unipi.it/~galli 4 Novembre 2014 Ricerca Operativa 2 Laurea Magistrale in Ingegneria Gestionale
PRESTAZIONI efficienti Linde ECO Mode. Linde Material Handling
 PRESTAZIONI efficienti Linde ECO Mode Linde Material Handling Una delle maggiori aziende di veicoli al mondo: L unica domanda quale versione Vi Linde PERFORMANCE Mode. Garantisce al carrello la piena
PRESTAZIONI efficienti Linde ECO Mode Linde Material Handling Una delle maggiori aziende di veicoli al mondo: L unica domanda quale versione Vi Linde PERFORMANCE Mode. Garantisce al carrello la piena
Il profiling dei disoccupati basato sull occupabilità: un alternativa di targeting in assenza di evidenza sull efficacia degli interventi
 Il profiling dei disoccupati basato sull occupabilità: un alternativa di targeting in assenza di evidenza sull efficacia degli interventi Luca Mo Costabella Mirare gli interventi sulla base della loro
Il profiling dei disoccupati basato sull occupabilità: un alternativa di targeting in assenza di evidenza sull efficacia degli interventi Luca Mo Costabella Mirare gli interventi sulla base della loro
Calcolatori Elettronici A a.a. 2008/2009
 Calcolatori Elettronici A a.a. 2008/2009 PRESTAZIONI DEL CALCOLATORE Massimiliano Giacomin Due dimensioni Tempo di risposta (o tempo di esecuzione): il tempo totale impiegato per eseguire un task (include
Calcolatori Elettronici A a.a. 2008/2009 PRESTAZIONI DEL CALCOLATORE Massimiliano Giacomin Due dimensioni Tempo di risposta (o tempo di esecuzione): il tempo totale impiegato per eseguire un task (include
Sistemi Operativi SCHEDULING DELLA CPU
 Sistemi Operativi SCHEDULING DELLA CPU Scheduling della CPU Concetti di Base Criteri di Scheduling Algoritmi di Scheduling FCFS, SJF, Round-Robin, A code multiple Scheduling in Multi-Processori Scheduling
Sistemi Operativi SCHEDULING DELLA CPU Scheduling della CPU Concetti di Base Criteri di Scheduling Algoritmi di Scheduling FCFS, SJF, Round-Robin, A code multiple Scheduling in Multi-Processori Scheduling
Regressione Mario Guarracino Data Mining a.a. 2010/2011
 Regressione Esempio Un azienda manifatturiera vuole analizzare il legame che intercorre tra il volume produttivo X per uno dei propri stabilimenti e il corrispondente costo mensile Y di produzione. Volume
Regressione Esempio Un azienda manifatturiera vuole analizzare il legame che intercorre tra il volume produttivo X per uno dei propri stabilimenti e il corrispondente costo mensile Y di produzione. Volume
INTRODUZIONE AL CONTROLLO OTTIMO
 INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
Appello di Ricerca Operativa A.A. 2006-2007 (29/3/2007)
") Nome... Cognome... 1 Appello di Ricerca Operativa A.A. 2006-2007 (29/3/2007) Si consideri la funzione f(x) = 4x 2 1 + 6x 4 2 2x 2 1x 2. Si applichi per un iterazione il metodo del gradiente a partire dai
Nome... Cognome... 1 Appello di Ricerca Operativa A.A. 2006-2007 (29/3/2007) Si consideri la funzione f(x) = 4x 2 1 + 6x 4 2 2x 2 1x 2. Si applichi per un iterazione il metodo del gradiente a partire dai
V. RISORSE PER IL PROGETTO
 V. RISORSE PER IL PROGETTO 1. Introduzione ai concetti di economicità ed efficacia Economicità = Validità economica L Economicità si scompone in : Efficacia Efficienza Con il termine EFFICACIA si intende
V. RISORSE PER IL PROGETTO 1. Introduzione ai concetti di economicità ed efficacia Economicità = Validità economica L Economicità si scompone in : Efficacia Efficienza Con il termine EFFICACIA si intende
scheduling Riedizione modifi cata delle slide della Prof. DI Stefano
 scheduling Riedizione modifi cata delle slide della Prof. DI Stefano 1 Scheduling Alternanza di CPU burst e periodi di I/O wait a) processo CPU-bound b) processo I/O bound 2 CPU Scheduler Seleziona uno
scheduling Riedizione modifi cata delle slide della Prof. DI Stefano 1 Scheduling Alternanza di CPU burst e periodi di I/O wait a) processo CPU-bound b) processo I/O bound 2 CPU Scheduler Seleziona uno
Produzione e forza lavoro
 Produzione e forza lavoro Testo Un azienda produce i modelli I, II e III di un certo prodotto a partire dai materiali grezzi A e B, di cui sono disponibili 4000 e 6000 unità, rispettivamente. In particolare,
Produzione e forza lavoro Testo Un azienda produce i modelli I, II e III di un certo prodotto a partire dai materiali grezzi A e B, di cui sono disponibili 4000 e 6000 unità, rispettivamente. In particolare,
Un algoritmo per la valutazione e la gestione ottimale dei crediti in sofferenza
 Un algoritmo per la valutazione e la gestione ottimale dei crediti in sofferenza Andrea Gamba DSE - Università di Verona e SAFE con la collaborazione e il contributo di UGC Banca SpA IAS/IFRS e non performing
Un algoritmo per la valutazione e la gestione ottimale dei crediti in sofferenza Andrea Gamba DSE - Università di Verona e SAFE con la collaborazione e il contributo di UGC Banca SpA IAS/IFRS e non performing
Cristian Secchi Pag. 1
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Metodi e Modelli per l Ottimizzazione Combinatoria Il problema del flusso di costo minimo
 Metodi e Modelli per l Ottimizzazione Combinatoria Il problema del flusso di costo minimo L. De Giovanni G. Zambelli 1 Problema del flusso a costo minimo Il problema del flusso a costo minimo é definito
Metodi e Modelli per l Ottimizzazione Combinatoria Il problema del flusso di costo minimo L. De Giovanni G. Zambelli 1 Problema del flusso a costo minimo Il problema del flusso a costo minimo é definito
ANALISI E SIMULAZIONE DI SISTEMI DINAMICI. Lezione I: Introduzione ai sistemi dinamici
 ANALISI E SIMULAZIONE DI SISTEMI DINAMICI Lezione I: Introduzione ai sistemi dinamici Cosa è un sistema dinamico Un pò di storia Principio di causalità Concetto di stato Esempi di sistemi dinamici 1-1
ANALISI E SIMULAZIONE DI SISTEMI DINAMICI Lezione I: Introduzione ai sistemi dinamici Cosa è un sistema dinamico Un pò di storia Principio di causalità Concetto di stato Esempi di sistemi dinamici 1-1
La Minimizzazione dei costi
 La Minimizzazione dei costi Il nostro obiettivo è lo studio del comportamento di un impresa che massimizza il profitto sia in mercati concorrenziali che non concorrenziali. Ora vedremo la fase della minimizzazione
La Minimizzazione dei costi Il nostro obiettivo è lo studio del comportamento di un impresa che massimizza il profitto sia in mercati concorrenziali che non concorrenziali. Ora vedremo la fase della minimizzazione
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
I motori di ricerca. Che cosa sono. Stefania Marrara Corso di Sistemi Informativi
 I motori di ricerca Stefania Marrara Corso di Sistemi Informativi a.a 2002/2003 Che cosa sono Un motore di ricerca è uno strumento per mezzo del quale è possibile ricercare alcuni termini (parole) all
I motori di ricerca Stefania Marrara Corso di Sistemi Informativi a.a 2002/2003 Che cosa sono Un motore di ricerca è uno strumento per mezzo del quale è possibile ricercare alcuni termini (parole) all
Tipologie di pianificatori. Pianificazione. Partial Order Planning. E compiti diversi. Pianificazione gerarchica. Approcci integrati
 Tipologie di pianificatori Pianificazione Intelligenza Artificiale e Agenti II modulo Pianificazione a ordinamento parziale (POP) (HTN) pianificazione logica (SatPlan) Pianificazione come ricerca su grafi
Tipologie di pianificatori Pianificazione Intelligenza Artificiale e Agenti II modulo Pianificazione a ordinamento parziale (POP) (HTN) pianificazione logica (SatPlan) Pianificazione come ricerca su grafi
Controllo Digitale - A. Bemporad - A.a. 2007/08
 Controllo di sistemi con saturazione (tecniche di anti-windup) controllore lineare Kx(k) saturazione Problema del Windup u(k) processo x(k) La maggior parte dei sistemi di controllo viene progettata utilizzando
Controllo di sistemi con saturazione (tecniche di anti-windup) controllore lineare Kx(k) saturazione Problema del Windup u(k) processo x(k) La maggior parte dei sistemi di controllo viene progettata utilizzando
IDENTIFICAZIONE dei MODELLI e ANALISI dei DATI. Lezione 40: Filtro di Kalman - introduzione. Struttura ricorsiva della soluzione.
 IDENTIFICAZIONE dei MODELLI e ANALISI dei DATI Lezione 40: Filtro di Kalman - introduzione Cenni storici Filtro di Kalman e filtro di Wiener Formulazione del problema Struttura ricorsiva della soluzione
IDENTIFICAZIONE dei MODELLI e ANALISI dei DATI Lezione 40: Filtro di Kalman - introduzione Cenni storici Filtro di Kalman e filtro di Wiener Formulazione del problema Struttura ricorsiva della soluzione
Lezioni di Ricerca Operativa. Corso di Laurea in Informatica Università di Salerno. Lezione n 4
 Lezioni di Ricerca Operativa Lezione n 4 - Problemi di Programmazione Matematica - Problemi Lineari e Problemi Lineari Interi - Forma Canonica. Forma Standard Corso di Laurea in Informatica Università
Lezioni di Ricerca Operativa Lezione n 4 - Problemi di Programmazione Matematica - Problemi Lineari e Problemi Lineari Interi - Forma Canonica. Forma Standard Corso di Laurea in Informatica Università
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Dr. Francesco Beccari. Diessechem Srl, Via Meucci 61/b, 20128 Milano
 RAMAN SORS per l identificazione delle materie prime attraverso il contenitore originale e RAMAN TRS per la misura spettrofotometrica della content uniformity Dr. Francesco Beccari Diessechem Srl, Via
RAMAN SORS per l identificazione delle materie prime attraverso il contenitore originale e RAMAN TRS per la misura spettrofotometrica della content uniformity Dr. Francesco Beccari Diessechem Srl, Via
PIANIFICAZIONE AUTOMATICA DEGLI INTERVENTI DI ASSISTENZA TECNICA. 2 Dicembre 2010
 DI ASSISTENZA TECNICA 2 Dicembre 2010 La Pianificazione come strumento di ottimizzazione delle attività di assistenza tecnica Origine dell idea progettuale... deriva dall interesse, manifestato dai Clienti
DI ASSISTENZA TECNICA 2 Dicembre 2010 La Pianificazione come strumento di ottimizzazione delle attività di assistenza tecnica Origine dell idea progettuale... deriva dall interesse, manifestato dai Clienti
1. Sia dato un poliedro. Dire quali delle seguenti affermazioni sono corrette.
 . Sia dato un poliedro. (a) Un vettore x R n è un vertice di P se soddisfa alla seguenti condizioni: x P e comunque presi due punti distinti x, x 2 P tali che x x e x x 2 si ha x = ( β)x + βx 2 con β [0,
. Sia dato un poliedro. (a) Un vettore x R n è un vertice di P se soddisfa alla seguenti condizioni: x P e comunque presi due punti distinti x, x 2 P tali che x x e x x 2 si ha x = ( β)x + βx 2 con β [0,
Controllori PID, metodi di taratura e problemi d implementazione
 Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Whitepaper Algoritmo Contributo Mensile Automatico
 Whitepaper Algoritmo Contributo Mensile Automatico L obiettivo dell algoritmo alla base della funzionalità del Contributo Mensile automatico è quello di fornire al cliente, che investe un determinato importo
Whitepaper Algoritmo Contributo Mensile Automatico L obiettivo dell algoritmo alla base della funzionalità del Contributo Mensile automatico è quello di fornire al cliente, che investe un determinato importo
Parte 4. Progettazione di una simulazione
 Parte 4 Progettazione di una simulazione Fasi di uno studio di simulazione l approccio a cascata Problema Analisi e validazione Progettazione e test Sistema Modello concettuale Programma di simulazione
Parte 4 Progettazione di una simulazione Fasi di uno studio di simulazione l approccio a cascata Problema Analisi e validazione Progettazione e test Sistema Modello concettuale Programma di simulazione
Computazione per l interazione naturale: Modelli dinamici
 Computazione per l interazione naturale: Modelli dinamici Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2015.html
Computazione per l interazione naturale: Modelli dinamici Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2015.html
GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10. Angelo Bonomi
 GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10 Angelo Bonomi CONSIDERAZIONI SUL MONITORAGGIO Un monitoraggio ottimale dipende dalle considerazioni seguenti:
GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10 Angelo Bonomi CONSIDERAZIONI SUL MONITORAGGIO Un monitoraggio ottimale dipende dalle considerazioni seguenti:
Basi di Dati Relazionali
 Corso di Laurea in Informatica Basi di Dati Relazionali a.a. 2009-2010 PROGETTAZIONE DI UNA BASE DI DATI Raccolta e Analisi dei requisiti Progettazione concettuale Schema concettuale Progettazione logica
Corso di Laurea in Informatica Basi di Dati Relazionali a.a. 2009-2010 PROGETTAZIONE DI UNA BASE DI DATI Raccolta e Analisi dei requisiti Progettazione concettuale Schema concettuale Progettazione logica
La schedulazione. E.Mumolo mumolo@units.it
 La schedulazione E.Mumolo mumolo@units.it Concetti fondamentali Multiprogrammazione: esecuzione simultanea di più sequenze di esecuzione Pseudo-parallelismo su una sola CPU Esecuzione parallela su più
La schedulazione E.Mumolo mumolo@units.it Concetti fondamentali Multiprogrammazione: esecuzione simultanea di più sequenze di esecuzione Pseudo-parallelismo su una sola CPU Esecuzione parallela su più
INTRODUZIONE AGLI ALGORITMI INTRODUZIONE AGLI ALGORITMI INTRODUZIONE AGLI ALGORITMI INTRODUZIONE AGLI ALGORITMI
 INTRODUZIONE AGLI ALGORITMI Prima di riuscire a scrivere un programma, abbiamo bisogno di conoscere un metodo risolutivo, cioè un metodo che a partire dai dati di ingresso fornisce i risultati attesi.
INTRODUZIONE AGLI ALGORITMI Prima di riuscire a scrivere un programma, abbiamo bisogno di conoscere un metodo risolutivo, cioè un metodo che a partire dai dati di ingresso fornisce i risultati attesi.
 L ACQUISIZIONE DIGITALE DEI SEGNALI I vantaggi principali dei sistemi digitali consistono in: elevata insensibilità ai disturbi bassa incertezza con costi relativamente contenuti compatibilità intrinseca
L ACQUISIZIONE DIGITALE DEI SEGNALI I vantaggi principali dei sistemi digitali consistono in: elevata insensibilità ai disturbi bassa incertezza con costi relativamente contenuti compatibilità intrinseca
Se x* e punto di minimo (locale) per la funzione nell insieme Ω, Ω = { x / g i (x) 0 i I, h j (x)= 0 j J } lo e anche per F(x) = f o (x) + c x x 2
 per la funzione nell insieme Ω, Ω = { x / g i (x) 0 i I, h j (x)= 0 j J } lo e anche per F(x) = f o (x) + c x x 2") NLP -OPT 1 CONDIZION DI OTTIMO [ Come ricavare le condizioni di ottimo. ] Si suppone x* sia punto di ottimo (minimo) per il problema min f o (x) con vincoli g i (x) 0 i I h j (x) = 0 j J la condizione
NLP -OPT 1 CONDIZION DI OTTIMO [ Come ricavare le condizioni di ottimo. ] Si suppone x* sia punto di ottimo (minimo) per il problema min f o (x) con vincoli g i (x) 0 i I h j (x) = 0 j J la condizione
3 CENNI DI TEORIA DELLA COMPLESSITA COMPUTAZIONALE. E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 3 CENNI DI TEORIA DELLA COMPLESSITA COMPUTAZIONALE E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Scopo: Stimare l onere computazionale per risolvere problemi di ottimizzazione e di altra natura
3 CENNI DI TEORIA DELLA COMPLESSITA COMPUTAZIONALE E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Scopo: Stimare l onere computazionale per risolvere problemi di ottimizzazione e di altra natura
Prova Parziale 1 Corso di Biosensori - Ing. Mazzei (22 Aprile 2013)
") Prova Parziale 1 Corso di Biosensori - Ing. Mazzei (22 Aprile 2013) Esercizio 1 Considerando la seguente tabella riportante i dati raccolti per la taratura di un sensore di temperatura. Si determini: -
Prova Parziale 1 Corso di Biosensori - Ing. Mazzei (22 Aprile 2013) Esercizio 1 Considerando la seguente tabella riportante i dati raccolti per la taratura di un sensore di temperatura. Si determini: -
IN COLLABORAZIONE CON OPTA SRL
 PROGRAMMARE LA PRODUZIONE IN MODO SEMPLICE ED EFFICACE IN COLLABORAZIONE CON OPTA SRL SOMMARIO 1. L AZIENDA E IL PRODOTTO 2. IL PROBLEMA 3. DATI DI INPUT 4. VERIFICA CARICO DI LAVORO SETTIMANALE 5. VERIFICA
PROGRAMMARE LA PRODUZIONE IN MODO SEMPLICE ED EFFICACE IN COLLABORAZIONE CON OPTA SRL SOMMARIO 1. L AZIENDA E IL PRODOTTO 2. IL PROBLEMA 3. DATI DI INPUT 4. VERIFICA CARICO DI LAVORO SETTIMANALE 5. VERIFICA
Modello matematico PROGRAMMAZIONE LINEARE PROGRAMMAZIONE LINEARE
 PRGRMMZIN LINR Problemi di P.L. in due variabili metodo grafico efinizione: la programmazione lineare serve per determinare l allocazione ottimale di risorse disponibili in quantità limitata, per ottimizzare
PRGRMMZIN LINR Problemi di P.L. in due variabili metodo grafico efinizione: la programmazione lineare serve per determinare l allocazione ottimale di risorse disponibili in quantità limitata, per ottimizzare
Problemi di localizzazione impianti
 Problemi di localizzazione impianti Laura Galli Dipartimento di Informatica Largo B. Pontecorvo 3, 56127 Pisa laura.galli@unipi.it http://www.di.unipi.it/~galli 2 Dicembre 2014 Ricerca Operativa 2 Laurea
Problemi di localizzazione impianti Laura Galli Dipartimento di Informatica Largo B. Pontecorvo 3, 56127 Pisa laura.galli@unipi.it http://www.di.unipi.it/~galli 2 Dicembre 2014 Ricerca Operativa 2 Laurea
Ricerca Operativa A.A. 2007/2008
 Ricerca Operativa A.A. 2007/2008 9. Cenni su euristiche e metaeuristiche per ottimizzazione combinatoria Motivazioni L applicazione di metodi esatti non è sempre possibile a causa della complessità del
Ricerca Operativa A.A. 2007/2008 9. Cenni su euristiche e metaeuristiche per ottimizzazione combinatoria Motivazioni L applicazione di metodi esatti non è sempre possibile a causa della complessità del
Studente: SANTORO MC. Matricola : 528
 CORSO di LAUREA in INFORMATICA Corso di CALCOLO NUMERICO a.a. 2004-05 Studente: SANTORO MC. Matricola : 528 PROGETTO PER L ESAME 1. Sviluppare una versione dell algoritmo di Gauss per sistemi con matrice
CORSO di LAUREA in INFORMATICA Corso di CALCOLO NUMERICO a.a. 2004-05 Studente: SANTORO MC. Matricola : 528 PROGETTO PER L ESAME 1. Sviluppare una versione dell algoritmo di Gauss per sistemi con matrice
Calcolatori Elettronici B a.a. 2006/2007
 Calcolatori Elettronici B a.a. 2006/2007 RETI LOGICHE: RICHIAMI Massimiliano Giacomin 1 Due tipi di unità funzionali Elementi di tipo combinatorio: - valori di uscita dipendono solo da valori in ingresso
Calcolatori Elettronici B a.a. 2006/2007 RETI LOGICHE: RICHIAMI Massimiliano Giacomin 1 Due tipi di unità funzionali Elementi di tipo combinatorio: - valori di uscita dipendono solo da valori in ingresso
Algoritmi e Strutture Dati II: Parte B Anno Accademico 2004-2005. Lezione 11
 Algoritmi e Strutture Dati II: Parte B Anno Accademico 2004-2005 Docente: Ugo Vaccaro Lezione 11 In questa lezione vedremo alcune applicazioni della tecnica greedy al progetto di algoritmi on-line. Vediamo
Algoritmi e Strutture Dati II: Parte B Anno Accademico 2004-2005 Docente: Ugo Vaccaro Lezione 11 In questa lezione vedremo alcune applicazioni della tecnica greedy al progetto di algoritmi on-line. Vediamo
Ricerca Operativa e Logistica
 Ricerca Operativa e Logistica Dott. F.Carrabs e Dott.ssa M.Gentili A.A. 20/202 Lezione 6-8 Rappresentazione di funzioni non lineari: - Costi fissi - Funzioni lineari a tratti Funzioni obiettivo non lineari:
Ricerca Operativa e Logistica Dott. F.Carrabs e Dott.ssa M.Gentili A.A. 20/202 Lezione 6-8 Rappresentazione di funzioni non lineari: - Costi fissi - Funzioni lineari a tratti Funzioni obiettivo non lineari:
Ricerca Operativa A.A. 2007/2008. 10. Dualità in Programmazione Lineare
 Ricerca Operativa A.A. 2007/2008 10. Dualità in Programmazione Lineare Luigi De Giovanni - Ricerca Operativa - 10. Dualità in Programmazione Lineare 10.1 Soluzione di un problema di PL: punti di vista
Ricerca Operativa A.A. 2007/2008 10. Dualità in Programmazione Lineare Luigi De Giovanni - Ricerca Operativa - 10. Dualità in Programmazione Lineare 10.1 Soluzione di un problema di PL: punti di vista
mese 1 2 3 4 5 richiesta 6000 7000 8000 9500 11000
 1.7 Servizi informatici. Un negozio di servizi informatici stima la richiesta di ore di manutenzione/consulenza per i prossimi cinque mesi: mese 1 2 3 4 5 richiesta 6000 7000 8000 9500 11000 All inizio
1.7 Servizi informatici. Un negozio di servizi informatici stima la richiesta di ore di manutenzione/consulenza per i prossimi cinque mesi: mese 1 2 3 4 5 richiesta 6000 7000 8000 9500 11000 All inizio
Problemi complessi : come trovare una soluzione soddisfacente?
 Informatica nel futuro, sfide e prospettive - evento scientifico per i 40 anni di ated Manno, 7 ottobre 2011 Problemi complessi : come trovare una soluzione soddisfacente? Marino Widmer Università di Friburgo
Informatica nel futuro, sfide e prospettive - evento scientifico per i 40 anni di ated Manno, 7 ottobre 2011 Problemi complessi : come trovare una soluzione soddisfacente? Marino Widmer Università di Friburgo
Esercitazione n 1: Circuiti di polarizzazione (1/2)
") Esercitazione n 1: Circuiti di polarizzazione (1/2) 1) Per il circuito in Fig. 1 determinare il valore delle resistenze R B ed R C affinché: = 3 ma - V CE = 7 V. Siano noti: = 15 V; β = 120; V BE = 0,7
Esercitazione n 1: Circuiti di polarizzazione (1/2) 1) Per il circuito in Fig. 1 determinare il valore delle resistenze R B ed R C affinché: = 3 ma - V CE = 7 V. Siano noti: = 15 V; β = 120; V BE = 0,7
Facoltà di Scienze Politiche e di Scienze della Comunicazione. Corso di laurea in Economia e Metodi Quantitativi per le Aziende
 Facoltà di Scienze Politiche e di Scienze della Comunicazione Marketing MARKETING DEL Corso di laurea in Economia e Metodi Quantitativi per le Aziende TURISMO II MODULO STATISTICA ECONOMICA E MARKETING
Facoltà di Scienze Politiche e di Scienze della Comunicazione Marketing MARKETING DEL Corso di laurea in Economia e Metodi Quantitativi per le Aziende TURISMO II MODULO STATISTICA ECONOMICA E MARKETING
Sistemi Operativi IMPLEMENTAZIONE DEL FILE SYSTEM. D. Talia - UNICAL. Sistemi Operativi 9.1
 IMPLEMENTAZIONE DEL FILE SYSTEM 9.1 Implementazione del File System Struttura del File System Implementazione Implementazione delle Directory Metodi di Allocazione Gestione dello spazio libero Efficienza
IMPLEMENTAZIONE DEL FILE SYSTEM 9.1 Implementazione del File System Struttura del File System Implementazione Implementazione delle Directory Metodi di Allocazione Gestione dello spazio libero Efficienza
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
Informatica 3. Informatica 3. LEZIONE 10: Introduzione agli algoritmi e alle strutture dati. Lezione 10 - Modulo 1. Importanza delle strutture dati
 Informatica 3 Informatica 3 LEZIONE 10: Introduzione agli algoritmi e alle strutture dati Modulo 1: Perchè studiare algoritmi e strutture dati Modulo 2: Definizioni di base Lezione 10 - Modulo 1 Perchè
Informatica 3 Informatica 3 LEZIONE 10: Introduzione agli algoritmi e alle strutture dati Modulo 1: Perchè studiare algoritmi e strutture dati Modulo 2: Definizioni di base Lezione 10 - Modulo 1 Perchè
Modellazione del flusso di attività a partire da testo in linguaggio naturale: il caso di una compagnia di assicurazioni
 Modellazione del flusso di attività a partire da testo in linguaggio naturale: il caso di una compagnia di assicurazioni Il dipartimento di una compagnia di assicurazioni si occupa di gestire le richieste
Modellazione del flusso di attività a partire da testo in linguaggio naturale: il caso di una compagnia di assicurazioni Il dipartimento di una compagnia di assicurazioni si occupa di gestire le richieste
Criteri di Scheduling Algoritmi di Scheduling Multiple-Processor Scheduling Asymmetric/Symmetric multiprocessing Processori Multicore
 Criteri di Scheduling Algoritmi di Scheduling Multiple-Processor Scheduling Asymmetric/Symmetric multiprocessing Processori Multicore 5.2 Silberschatz, Galvin and Gagne 2005 1 Massimizzare lʼutilizzo della
Criteri di Scheduling Algoritmi di Scheduling Multiple-Processor Scheduling Asymmetric/Symmetric multiprocessing Processori Multicore 5.2 Silberschatz, Galvin and Gagne 2005 1 Massimizzare lʼutilizzo della
Statistica. Lezione 6
 Università degli Studi del Piemonte Orientale Corso di Laurea in Infermieristica Corso integrato in Scienze della Prevenzione e dei Servizi sanitari Statistica Lezione 6 a.a 011-01 Dott.ssa Daniela Ferrante
Università degli Studi del Piemonte Orientale Corso di Laurea in Infermieristica Corso integrato in Scienze della Prevenzione e dei Servizi sanitari Statistica Lezione 6 a.a 011-01 Dott.ssa Daniela Ferrante
MESSA IN SCALA DI ALGORITMI DIGITALI
 Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Fondamenti di Automatica. Modellistica dei sistemi dinamici a tempo discreto
 Fondamenti di Automatica Modellistica dei sistemi dinamici a tempo discreto Sistemi dinamici a tempo discreto I sistemi dinamici a tempo discreto sono sistemi in cui tutte le grandezze variabili sono funzioni
Fondamenti di Automatica Modellistica dei sistemi dinamici a tempo discreto Sistemi dinamici a tempo discreto I sistemi dinamici a tempo discreto sono sistemi in cui tutte le grandezze variabili sono funzioni
ALWAYS ON MARKETING, IN AN ALWAYS ON WORLD ADVERTISING DIGITALE CON ROCKET FUEL
 ALWAYS ON MARKETING, IN AN ALWAYS ON WORLD ADVERTISING DIGITALE CON ROCKET FUEL AGENDA 1. ALWAYS ON MARKETING: INTRODUZIONE 2. 11 CONSIGLI FONDAMENTALI PER LA PUBBLICITÀ PROGRAMMATICA 3. L ALGORITMO DI
ALWAYS ON MARKETING, IN AN ALWAYS ON WORLD ADVERTISING DIGITALE CON ROCKET FUEL AGENDA 1. ALWAYS ON MARKETING: INTRODUZIONE 2. 11 CONSIGLI FONDAMENTALI PER LA PUBBLICITÀ PROGRAMMATICA 3. L ALGORITMO DI
CONTROLLO PREDITTIVO BASATO SU MODELLO (MPC: MODEL PREDICTIVE CONTROL)
") CONTROLLO PREDITTIVO BASATO SU MODELLO (MPC: MODEL PREDICTIVE CONTROL) 1. INTRODUZIONE La strategia di controllo più largamente applicata nelle industrie di processo è il controllo predittivo basato sul
CONTROLLO PREDITTIVO BASATO SU MODELLO (MPC: MODEL PREDICTIVE CONTROL) 1. INTRODUZIONE La strategia di controllo più largamente applicata nelle industrie di processo è il controllo predittivo basato sul
Identificazione dei Parametri Caratteristici di un Plasma Circolare Tramite Rete Neuronale
 Identificazione dei Parametri Caratteristici di un Plasma Circolare Tramite Rete euronale Descrizione Il presente lavoro, facente segiuto a quanto descritto precedentemente, ha il fine di: 1) introdurre
Identificazione dei Parametri Caratteristici di un Plasma Circolare Tramite Rete euronale Descrizione Il presente lavoro, facente segiuto a quanto descritto precedentemente, ha il fine di: 1) introdurre
Principi di analisi causale Lezione 2
 Anno accademico 2007/08 Principi di analisi causale Lezione 2 Docente: prof. Maurizio Pisati Logica della regressione Nella sua semplicità, l espressione precedente racchiude interamente la logica della
Anno accademico 2007/08 Principi di analisi causale Lezione 2 Docente: prof. Maurizio Pisati Logica della regressione Nella sua semplicità, l espressione precedente racchiude interamente la logica della
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 51-56025 PONTEDERA (PI) DIPARTIMENTO: Discipline Informatiche
 DIPARTIMENTO: Discipline Informatiche") PROGRAMMAZIONE COORDINATA TEMPORALMENTE Monte ore annuo 99 Libro di Testo Barbero, Vaschetto - Corso di Informatica - terzo anno Ed. Pearson SETTEMBRE OTTOBRE Modulo 0 : CODIFICA INFORMAZIONI Rappresentazione
PROGRAMMAZIONE COORDINATA TEMPORALMENTE Monte ore annuo 99 Libro di Testo Barbero, Vaschetto - Corso di Informatica - terzo anno Ed. Pearson SETTEMBRE OTTOBRE Modulo 0 : CODIFICA INFORMAZIONI Rappresentazione
SOLUZIONI INFORMATICHE PER LO STUDIO LEGALE
 SOLUZIONI INFORMATICHE PER LO STUDIO LEGALE Nekte Srl Viale Gran Sasso, 10-20131 Milano Tel. 02 29521765 - Fax 02 29532131 info@nekte.it www.nekte.it L IMPORTANZA DI CONOSCERE I PROFESSIONISTI Nekte ha
SOLUZIONI INFORMATICHE PER LO STUDIO LEGALE Nekte Srl Viale Gran Sasso, 10-20131 Milano Tel. 02 29521765 - Fax 02 29532131 info@nekte.it www.nekte.it L IMPORTANZA DI CONOSCERE I PROFESSIONISTI Nekte ha
AZIONE DI SISTEMA G. Partner responsabile Università de Corse
 N componente 5 N azione 3.2 Titolo prodotto : prototipi software di simulazione del comportamento idrologico del bacino versante del sud est della Corsica tenendo conto le ottimizzazioni AZIONE DI SISTEMA
N componente 5 N azione 3.2 Titolo prodotto : prototipi software di simulazione del comportamento idrologico del bacino versante del sud est della Corsica tenendo conto le ottimizzazioni AZIONE DI SISTEMA
Effetto Feedback fra somiglianza e influenza sociale nelle community on line
 ALMA MATER STUDIORUM A.D. 1088 UNIVERSITÁ DI BOLOGNA Scuola di Scienze MM FF NN Corso di Laurea Magistrale in Informatica Effetto Feedback fra somiglianza e influenza sociale nelle community on line Claudia
ALMA MATER STUDIORUM A.D. 1088 UNIVERSITÁ DI BOLOGNA Scuola di Scienze MM FF NN Corso di Laurea Magistrale in Informatica Effetto Feedback fra somiglianza e influenza sociale nelle community on line Claudia
della funzione obiettivo. Questo punto dovrebbe risultare chiaro se consideriamo una generica funzione:
 Corso di laurea in Economia e finanza CLEF) Economia pubblica ************************************************************************************ Una nota elementare sulla ottimizzazione in presenza di
Corso di laurea in Economia e finanza CLEF) Economia pubblica ************************************************************************************ Una nota elementare sulla ottimizzazione in presenza di
SIMULAZIONE ESAME di OTTIMIZZAZIONE Corso di Laurea in Ingegneria Gestionale 2 o anno
 SIMULAZIONE ESAME di OTTIMIZZAZIONE 28 novembre 2005 SIMULAZIONE ESAME di OTTIMIZZAZIONE Corso di Laurea in Ingegneria Gestionale 2 o anno Cognome : XXXXXXXXXXXXXXXXX Nome : XXXXXXXXXXXXXX VALUTAZIONE
SIMULAZIONE ESAME di OTTIMIZZAZIONE 28 novembre 2005 SIMULAZIONE ESAME di OTTIMIZZAZIONE Corso di Laurea in Ingegneria Gestionale 2 o anno Cognome : XXXXXXXXXXXXXXXXX Nome : XXXXXXXXXXXXXX VALUTAZIONE
Modelli di Programmazione Lineare e Programmazione Lineare Intera
 Modelli di Programmazione Lineare e Programmazione Lineare Intera 1 Azienda Dolciaria Un azienda di cioccolatini deve pianificare la produzione per i prossimi m mesi. In ogni mese l azienda ha a disposizione
Modelli di Programmazione Lineare e Programmazione Lineare Intera 1 Azienda Dolciaria Un azienda di cioccolatini deve pianificare la produzione per i prossimi m mesi. In ogni mese l azienda ha a disposizione
I vantaggi del nuovo sistema: qualità dell output e burden sulle imprese
 Workshop Nuove informazioni statistiche per misurare la struttura e la performance delle imprese italiane I vantaggi del nuovo sistema: qualità dell output e burden sulle imprese Giampiero Siesto Viviana
Workshop Nuove informazioni statistiche per misurare la struttura e la performance delle imprese italiane I vantaggi del nuovo sistema: qualità dell output e burden sulle imprese Giampiero Siesto Viviana
Algoritmi e Strutture Dati
 Elementi di Programmazione Dinamica Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino Il problema La CMC produce automobili in uno stabilimento
Elementi di Programmazione Dinamica Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino Il problema La CMC produce automobili in uno stabilimento