Controllo Manipolatori. Massimo Cavallari. Corso di Robotica Prof.ssa Giuseppina Gini 2007/2008
|
|
|
- Norberto Cara
- 8 anni fa
- Visualizzazioni
Transcript
1 Controllo Manipolatori Massimo Cavallari Corso di Robotica Prof.ssa Giuseppina Gini 2007/2008 1

2 Scelta della velocità nei punti di via con metodo Euristico: 2) Il sistema con tecniche euristiche calcola in automatico le velocità nei punti di via (magari facendo in modo che le accelerazioni siano continue) [Sono stati specificati solo i punti di passaggio senza specificare le velocità intermedie] 2

3 Connettere due cubiche in un punto di via (imponendo accelerazione continua nel punto di via) Consideriamo 3 punti: ϑ 0 ϑ v ϑ f θ(t) = a 10 + a 11 t+ a 12 t 2 + a 13 t 3 θ(t) = a 20 + a 21 t + a 22 t 2 + a 23 t 3 Traiettoria da θ 0 a θ v Traiettoria da θ v a θ f Con t che va da zero a t f1 per la prima cubica, e da zero a t f2 per la seconda. Deve valere quindi: θ 0 = a 10 θ v = a 10 + a 11 t f1 + a 12 t 2 f1 + a 13 t3 f1 θ v = a 20 θ f = a 20 + a 21 t f2 + a 22 t 2 f2 + a 23 t3 f2 0= a 11 0= a a 22 t f2 +3 a 23 t 2 f2 a 21 = a a 12 t f1 +3 a 13 t 2 f1 2 a 22 =2 a a 13 t f1 Angolo pari a θ 0 per t=0 per la prima cubica Angolo pari a θ v per t=t f1 per la prima cubica Angolo pari a θ v per t=0 per la seconda cubica Angolo pari a θ f per t=t f2 Velocità nulla per t=0 Velocità nulla per t=t f2 Velocità uguale nel punto di via (prima cubica t=t f1 seconda t=0) Accelerazione uguale nel punto di via (prima cubica t=t f1 seconda t=0) 3

4 Esempio) Connessione tra 4 cubiche: Usando polinomi di terzo grado si ha accelerazione discontinua 4

5 5 Se vogliamo imporre condizioni anche per le accelerazioni occorre utilizzare polinomi di grado 5: ) ( t a t a t a t a a t a t = θ Si devono imporre le condizioni al contorno: f f i i f f i i f f i i q t q q t q q t q q t q q t q q t q && && && && & & & & = = = = = = ) ( ) ( ) ( ) ( ) ( ) ( Otteniamo.
 ( ) ( ) ( ) ( ) ( ) (")
6 6 Esempio polinomio di quinto grado: ) ( t a t a t a t a a t a t = θ 2 2 / 0 / 0 / 0 / s q s q s q s q q q f i f i f i = = = = = = && && & &

7 Più polinomi del 5 ordine. - Si ottengono delle traiettorie più dolci, che sollecitano meno la struttura meccanica del robot. - Il calcolo della traiettoria risulta essere più complesso. 7

8 Più polinomi del 5 ordine. L accelerazione assume un andamento oscillatorio indesiderato (possibili vibrazioni sulla struttura del robot.) 8

9 Utilizzo di funzioni Lineari con raccordi Parabolici (Spazio dei Giunti) - Questo metodo è stato sviluppato alla Standford University: - Utilizza dei segmenti di retta per interpolare i punti. θ goal start - Questo tuttavia implica accelerazione infinita durante la fase iniziale e finale del moto. t 6 DOF (1969) Si utilizzano dei raccordi parabolici durante la fase iniziale finale 9
 Si utilizzano dei raccordi parabolici durante la fase iniziale finale 9")
10 -Si hanno quindi tre tratti: uno lineare e due parabolici - Si possono avere differenti soluzioni ( a seconda di come scegliamo le accelerazioni iniziali e finali). Moto θ(t) 0 Accelerazione elevata t θ(t) 0 Accelerazione moderata t θ Raccordo 2 goal θ (t) θ (t) Velocità 0 t 0 t Tratto lineare θ (t) θ (t) Raccordo 1 Accelerazione 0 0 Start t t t 10
 θ (t) Velocità 0 t 0 t Tratto lineare θ (t) θ (t) Raccordo 1 Accelerazione 0 0")
11 L accelerazione usata per consentire il raccodo è tale per cui: 4( ) se && θ f θ0 θ = allora il tratto linerare è nullo 2 t - Il metodo è buono dal punto di vista computazionale (usa al massimo polinomi di 2 grado) - La gestione dei punti di via è complessa (i tratti parabolici sono difficili da raccordare) I punti di via non vengono raggiunti. && θ 4( θ f θ ) t 2 0 start goal - E possibile forzare il passaggio per i punti di via mettendo dei punti di via fittizi. 11
 t 2 0 start goal - E possibile forzare il passaggio per i punti di via mettendo dei punti di via")
12 Traiettorie nello Spazio Cartesiano Problemi: - Difficoltà nel calcolare la cinematica inversa in Real-time - Alcuni punti della traiettoria possono trovarsi fuori dallo spazio di lavoro - Possibile passaggio della traiettoria per punti singolari a velocità infinite. Possibile metodologia - Vogliamo una traiettoria rettilinea nello spazio cartesiano - Possiamo generare delle traiettorie nello spazio dei giunti che interpolino la traiettoria lineare scelta nello spazio cartesiano. 12

13 Algoritmo di Bounded Deviation Path 1. Calcola (cinematica inversa) la configurazione dei giunti di start e goal; calcola quindi la traiettoria nello spazio dei giunti fra start e goal; 2. Calcola il punto di mezzo nello spazio dei giunti, e applicando la cinematica diretta trova la posizione cartesiana corrispondente; 3. Se l errore nel cammino geometrico è maggiore di quello permesso allora a. metti un punto di via (knot) a metà del cammino cartesiano fra start e goal; b. dividi il cammino in due parti, da start a knot, da knot a goal; c. richiama ricorsivamente l algoritmo sulle due metà del cammino; a.altrimenti termina; 4. Ritorna la sequenza dei knot points (punti di vincolo). 13
 a metà del cammino cartesiano fra start e goal; b.")
14 Oss: -Questo metodo, nello spazio cartesiano genera una traiettoria che ondeggia attorno alla traiettoria rettilinea che volevamo approssimare. 14

15 Robot Toolbox Calcola una traiettoria nello spazio di giunto tra due configurazioni assegnate. >> T_1 = jtraj(q0, q1, n) >> T_1 = jtraj(q0, q1, n, qv0, qv1) Il risultato è una traiettoria q nello spazio di giunto tra q0 e q1. Possono essere specificate le velocità iniziali (qv0) e quelle finali (qv1). N indica il numero di configurazioni intermedie fornite. I valori di velocità e accelerazione vengono calcolati utilizzando un polinomio del settimo grado con condizioni al contorno nulle. Disegna il movimento del robot 15

16 Robot Toolbox Robot scara, generazione traiettoria nello spazio dei giunti (pick). qa = [ pi/2 pi/2-1 0] qb = [ pi/2 pi/2-3 0] Tc=0.01; % Tempo di campionamento 10 ms tempo=2; % Tempo totale (s) % Primo tratto della traiettoria t1=[0:tc:tempo]; figure(); plot(myrobot, qriposo ); pause(1) T_1=jtraj(qRiposo,qA, length(t1)); %calcolo traiettoria plot(myrobot, T_1 ); Da qriposo a qa T_2=jtraj(qA,qB, length(t1)); %movimento del robot plot(myrobot, T_2 ); Da qa qb 16
![01; % Tempo di campionamento 10 ms tempo=2; % Tempo totale (s) % Primo tratto della traiettoria t1=[0:tc:tempo];](/docs-images/46/9111876/images/page_16.jpg "figure(); plot(myrobot, qriposo ); pause(1) T_1=jtraj(qRiposo,qA, length(t1)); %calcolo traiettoria plot(myrobot,")
17 Robot Toolbox Grafici dei valori comandati ai giunti da qriposo a qa (prima traiettoria) figure plot(t_1(:,1)) figure plot(t_1(:,2)) figure plot(t_1(:,3)) θ 1 ( t) θ 2 ( t) q ( t 3 ) plot di una determinata colonna T_1(:,3) 17
 q ( t 3 ) plot di una determinata colonna T_1(:,3)")
18 Robot Toolbox Calcola una traiettoria nello spazio operativo tra due configurazioni assegnate. >> TC = ctraj(t0, T1, n) Il risultato è una traiettoria TC nello spazio operativo tra T0 e T1. N indica il numero di punti intermedi. 18

19 Robot Toolbox Definiamo un manipolatore antropomorfo con polso sferico utilizzando il robot toolbox

20 Robot Toolbox % Definizione dei parametri del robot a2=0.8; d4=0.8; d6=0.2; qz=[0, 0, 0, 0, 0, 0]; % definizione dei link di un % manipolatore antropomorfo con polso sferico % e creazione robot L1=link([ pi/ ]); L2=link([ 0 a ]); L3=link([ pi/ ]); L4=link([-pi/2 0 0 d4 0]); L5=link([pi/ ]); L6=link([ d6 0]); RA=robot({L1,L2,L3,L4,L5,L6});
![sferico % e creazione robot L1=link([ pi/2 0 0 0 0]); L2=link([ 0 a2 0 0 0]); L3=link([ pi/2](/docs-images/46/9111876/images/page_20.jpg "0 0 0 0]); L4=link([-pi/2 0 0 d4 0]); L5=link([pi/2 0 0 0 0]); L6=link([ 0 0 0 d6 0]);")
21 % Posizione e orientamento per effettuare la presa pickt=[ -1, 0, 0, 0.7; 0, 1, 0, 0.2; 0, 0,-1, 0; 0, 0, 0, 1]; Robot Toolbox % Sollevamento del pezzo at=[ -1, 0, 0, 0.7; 0, 1, 0, 0.2; 0, 0,-1, 1; 0, 0, 0, 1]; % Avvicinamento alla posizione finale bt=[ 1, 0, 0, 1; 0, -1, 0, 0.2; 0, 0, -1, 0.5; 0, 0, 0, 1]; % Posizione e orientamento finali placet=[ 1, 0, 0, 1; 0, -1, 0, 0.2; 0, 0,-1, 0; Posizione e orientamento per effettuare la presa 0, 0, 0, 1]; z y x
22 % Generazione della traiettoria: tempi Tc=0.01; % Tempo di campionamento 10 ms timeat=2; % Tempo per trovarsi in at timebt=4; %Tempo per trovarsi in bt timeplace=6; %Tempo per trovarsi in placet % Primo tratto t1=[0:tc:timeat]; % Calcolo traiettoria nello spazio cartesiano traparziale1=ctraj(pickt,at, length(t1)); % Secondo tratto t2=[timeat+tc:tc:timebt]; % Calcolo traiettoria nello spazio cartesiano traparziale2=ctraj(at,bt, length(t2)); t=[t1 t2 t3]; Ttotale=cat(3,traParziale1,traParziale2,traParziale3); % Traiettoria desiderata nello spazio operativo % Le matrici T e i tempi calcolati precedentemente vengono % concatenati QTraiettoria=ikine(RA,Ttotale); figure pause(2) plot(ra,qtraiettoria); % Calcolo dei valori da comandare ai giunti per ogni % valore campionato sulla traiettoria
23 Robot Toolbox 1 pick 2 at 3 bt 4 place
24
25
26 Calcolo delle traiettorie: l obiettivo può essere caratterizzato da due aspetti fondamentali: 1) Evitare gli ostacoli 2) Avere un cammino definito Analizziamo alcuni casi ottenuti dalla combinazione dei due precedenti: Caso 1: Si vogliono evitare gli ostacoli e c è un cammino voluto. Questo è il caso più complesso, al momento attuale la pianificazione fuori linea è l unica soluzione in quanto affrontare il problema run-time è troppo pesante Caso 2: senza ostacoli ma c è un cammino voluto. Questo caso è più semplice del precedente in quanto viene richiesto solo di seguire un percorso determinato. Il controllore deve raggiungere un insieme di posizioni specificate in sequenza.
27 Caso 3: ci sono solo ostacoli da evitare (qualsiasi traiettoria va bene) Non essendoci vincoli sul percorso gli ostacoli possono essere evitati con metodi reattivi. Caso 2: nessun ostacolo e nessun vincolo sul percorso E il caso più semplice, è sufficiente che la posizione sia raggiunta.
28 Le traiettorie possono essere calcolate Nello spazio dei giunti -Metodo efficiente -Le traiettorie nello spazio cartesiano sono imprevedibili Nello spazio cartesiano -È necessario calcolare la cinematica inversa per poter calcolare i valori da mandare ai giunti -Problemi nel caso in cui si passi anche solo vicino a punti singolari (jacobiano inverso non calcolabile)
29 Calcolo traiettorie nello spazio dei giunti Uso di cubiche -Metodo molto diffuso perché molto efficiente -I punti da raggiungere sono specificati nello spazio cartesiano tramite punti di partenza, di arrivo ed eventualmente punti di via. (la cinematica inversa viene utilizzata per calcolare i valori corrispondenti ai giunti) -Viene evitato il problema di passare per punti singolari -Non è possibile tenere conto delle condizioni del robot: estensione del braccio, peso trasportato.
30 Calcolo traiettorie nello spazio dei giunti Uso di polinomi di grado superiore al terzo -Si possono specificare posizioni, velocità, accelerazioni nei punti iniziali e finali. (polinomio ordine 5) -Permettono di gestire anche la continuità dell accelerazione nei punti di via (polinomi di ordine 7). Svantaggi: -il grado del polinomio dipende da n e per elevati valori la quantità di calcoli da eseguire può essere notevole. -Se si varia anche un solo singolo punto è necessario ricalcolare l intero polinomio. -Si ottengono delle soluzioni che presentano in generale delle oscillazioni indesiderate.
31 Controllori per Robot Industriali Il sistema di controllo di un robot è un dispositivo composto in genere da un sistema multi-processore, collegato in rete con altre risorse locali di controllo, monitoraggio e immagazzinamento dati. Funzioni di base: Interazione con l'operatore Immagazzinamento di dati Calcolo delle traiettorie Controllo in tempo reale del moto dei giunti Monitoraggio sensori Interazione con altri macchinari Interazione con altre risorse computazionali 31
32 Controllo del moto dei giunti Il controllore ha il compito di mantenere la risposta dinamica (velocità esecuzione movimento) del manipolatore entro certi limiti, fissati da criteri di prestazione stabiliti a priori. La soluzione a questo problema è complicata da: Forze inerziali Accoppiamento tra i vari giunti Forza di gravità Carico Variabile Il problema della sintesi del sistema di controllo si risolve: 1) trovando il modello dinamico del manipolatore 2) usando il modello per sintetizzare la legge di controllo in 32 conformità con le specifiche sulle prestazioni.
33 Controllo indipendente ai giunti Solitamente nei sistemi industriali, il sistema di controllo tratta ogni giunto del braccio come un semplice servomeccanismo indipendente dagli altri. Gli effetti di accoppiamento tra i vari giunti dovuti alla configurazione e al moto sono trattati come ingressi di disturbo. 33
34 Controllo indipendente ai giunti Questo approccio non è quello ottimale in quanto si trascura il moto e la configurazione istantanea dell intero braccio. Basse velocità nei movimenti Riduzione dello smorzamento dei servomeccanismi (oscillazioni) Tempi di attuazione più lunghi in presenza di carichi variabili 34
35 Controllo dei giunti Per il controllo ad anello chiuso: - Ogni giunto è controllato indipendentemente - Il controllore del giunto è un PID. X, X C a lc o lo d elle traie tto rie Cin. inv. J -1 θ. θ.. θ C o n tro llo re d e l g iu n to 1 C o n tro llo re d e l g iu n to 2... fo rze/m o m e n ti ro b o t (sensori in te rn i) C è un controllore per ogni giunto le variabili θ indicate sono dei vettori C o n tro llo re d e l g iu n to n θ. θ.. θ 35
36 Controllore Cinematico Cartesiano. X, X errore Cinematica Inversa J -1 X. X θ forze / momenti controllore. (guadagno) J = Jacobiano θ J 1 = Jacobiano inverso robot (sensori interni) Cinematica Diretta J θ. θ notare che il controllo è eseguito sulle variabili cartesiane su cui è calcolato l errore Oss: Se si movimentano degli oggetti diventa importante anche dinamica (considerare accelerazioni) la 36
37 Controllore nello spazio dei giunti Per risolvere il problema del controllo nello spazio dei giunti è necessario risolvere due problemi: 1) Inversione cinematica per convertire le specifiche di moto espresse nello spazio operativo in specifiche di moto nello spazio dei giunti 2) Sistema di controllo nello spazio dei giunti in grado di garantire l inseguimento dei riferimenti ottenuti tramite l inversione cinematica. 37
38 Controllo nello spazio dei giunti Inversione q d Controllore Attuatori Trasmissioni Manipolatore x x d Cinematica Trasduttori q 38
39 Controllo di un manipolatore nello spazio dei giunti Sistema di controllo PID (regolatore ad azione Proporzionale- Integrativa-Derivativa) In generale assume la seguente formulazione matematica: Y = K e + K e& + K p q d q i e q ( t) dt e p = q d q e& p = de dt p q q d = θ = θ d segnale di comando segnale in uscita 39
40 PID anti wind-up Il fenomeno di caricamento e scaricamento, legato al fatto di avere processi reali che saturano l uscita, viene chiamato wind-up. Il fenomeno si presenta quando l integratore si carica continuamente a causa di un segnale di errore elevato una volta che il processo è in saturazione. 40
41 PID anti wind-up Quando il controllore satura il termine integrale viene ricalcolato, diminuendo la sua azione di una quantità proporzionale alla profondità di saturazione. 41
42 PID anti wind-up Risposta al gradino (con anti wind-up) 42
43 Algoritmo controllore Implementazione software della funzione PID Disponendo di un sistema a microprocessore, capace di elaborare solo grandezze discrete, è necessario discretizzare la funzione PID. La corrispondente funzione analogica viene aggiornata e simulata tramite software. Derivando rispetto al tempo ambo i membri della precedente equazione, si ottiene la seguente forma discreta utilizzata per il calcolo della funzione PID: y = f ( x) = K1X + K 2 Xdt + K 3 dx dt dy dt = K 1 dx dt + K 2 X + K 3 2 d X 2 dt u( t) = θ ( t) d y( t) = θ ( t) segnale di comando segnalein uscita X(t) = e(t) = u(t) y(t) Errore 43
44 Algoritmo del controllo ( ) ( ) ( ) T K K T K K K K X X X K X K X X K Y Y T X X X X K X K T X X K T Y Y d i p n n n d n i n n p n n n n n n n n n n n ) ( ) ( ) ( = = = = + + = T: tempo di aggiornamento (intervallo tra due successivi aggiornamenti dell uscita Y). Xn : ultimo valore campionato. L accuratezza della funzione è tanto più elevata quanto più frequenti sono i campionamenti. La discretizzazione si traduce in un approssimazione a gradini dell andamento della variabile continua nel sistema reale. 44
45 Risposta discretizzata
46 Algoritmo del controllo La scelta della frequenza di campionamento deve nascere da un buon compromesso tra esigenze contrapposte. Il costo del sistema impone di scegliere un valore basso affinchè la potenza di calcolo necessaria per eseguire gli algoritmi di controllo sia minima e avere convertitori A/D D/A economici. Per avere buone prestazioni del sistema di controllo è necessario non scendere oltre un determinato limite inferiore per la frequenza di campionamento. Capacità di compensare i disturbi che agiscono sul processo Capacità di filtrare i rumori associati ai segnali provenienti dai sensori Capacità di inseguire il riferimento 46
47 Algoritmo del controllo Codice eseguito ad ogni periodo di campionamento. 1.Acquisizione ingressi e conversione A/D 2.Calcolo variabile di controllo u(t) 3.Aggiornamento dell uscita y(t) 4.Aggiornamento dello stato Oss: è necessario che il tempo computazionale della routine di controllo sia inferiore al tempo di campionamento scelto durante la sintesi del regolatore PID. Il mancato rispetto di questo vincolo porterebbe ad instabilità. 47
48 Hardware per sistemi di controllo MPC555 Features 40MHz Core with Floating Point Unit 26 Kbytes of Static RAM 448 Kbytes Flash EEPROM Memory with 5-V programming (CMF) Flexible Memory Protection Unit General-Purpose I/O Support Two Time Processor Units (TPU3) 18-Channel Modular I/O System (MIOS1) Two Queued Analog-to-Digital Converter Modules (QADC) Two CAN 2.0B Controller Modules (TouCANs) Queued Serial Multi-Channel Module (QSMCM) U-Bus System Interface Unit (USIU) Microcontrollore Motorola MPC555 48
49 Hardware per sistemi di controllo Controllore multiassi Galil (azienda USA leader mondiale nel settore) modello DMC-2143, dotato di interfaccia Ethernet che ne consente il comando e la supervisione da PC. Il controllore si fa carico della generazione dei comandi di movimento da inviare agli stadi di potenza dei motori, della lettura degli encoder che restituiscono la posizione degli assi chiudendo il loop di controllo, della gestione dei sensori di finecorsa e di home di ciascun asse. Modello DMC-2143 Galil 49
50 Controllore del Braccio PUMA 6 GDL Per il braccio della serie PUMA 560, il regolatore consiste in un calcolatore DEL e sei micro-controllori Rockwell ciascuno equipaggiato di encoder, convertitore DAC e amplificatore di corrente. 50
51 Attraverso il terminale l operatore può impartire comandi al braccio attraverso il linguaggio VAL. Una volta che il comando VAL è stato decodificato la CPU interna esegue delle routine memorizzate nella Eprom. 51
52 Compito delle routine interne è quello di: Eseguire le trasformazioni di coordinate, per esempio dato un punto dell ambiente esterno vengono ricavate le coordinate dei giunti o viceversa Pianificazione delle traiettorie interpolate dei giunti (ogni giunto aggiornato ogni 28ms) Accertamento che il comando è stato eseguito su ogni singolo giunto. Ogni servomeccanismo è controllato attraverso un regolatore PID: I guadagni dei PID sono costanti, questo risulta essere un problema specialmente in condizioni di carico variabile, infatti il robot Puma a velocità ridotte risulta essere soggetto a forti vibrazioni. 52
53 Robot Industriali (Breve Panoramica) 53
54 George Devol e Engelberger fondano nel 1956 la prima azienda di Robotica UNIMATION (USA) Aziende produttrici nel Mondo ABB (Nata in Europa dalla fusione della svedese ASEA e della svizzera BBC, leader nella Robotica) FANUC (USA-Giapponese, 1986) STÄUBLI (Europea, 1989, compera la Unimation) ADEPT (1983, USA) MOTOMAN (USA, 1989) KUKA (Tedesca) KAWASAKI (1969, Giapponese) 54
55 ABB Robots Installazioni 55

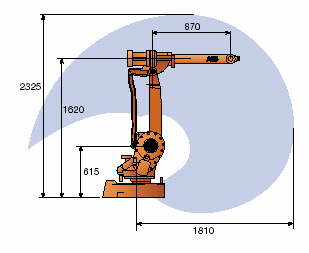
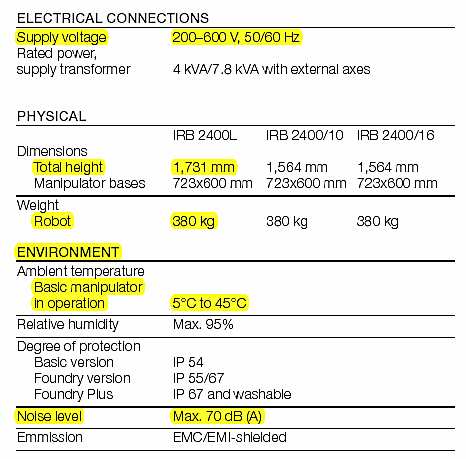
56 Esempio Manipolatore ABB: Applicazioni Saldatura ad arco Assemblaggio Pulizia Taglio ed eliminazione sbavature Incollaggio e sigillatura - E il robot più utilizzato al mondo (14000 installazioni) 56
57 Saldatura ad arco Eliminazione sbavature Taglio 57
58 58
.")
59 Axis 3 Axis 2 Accurato Il migliore nella propria classe per quanto riguarda l accuratezza del percorso e la ripetibilità della posizione (RP = 0.06 mm). Axis 1 59
60 Sicurezza nei Robot I "sistemi di sicurezza" principali presenti in una cella robotica si suddividono in: barriere fisiche: reti, barre luci lampeggianti sistemi elettronici: rilevano la presenza di di un intruso nello spazio di lavoro del robot segnali di pericolo sistemi intelligenti: sono in grado di arrestare il robot o di alterare automaticamente la traiettoria 60
61 Filmato Il controllo dei robot viene effettuato utilizzando Matlab e Simulink Robots ABB, task coordinato - Controllo di forza sull End-Effector - Fase prototipale Nella prima parte della dimostrazione i robot cooperano per assemblare un dado e un perno. Nella seconda parte un robot prende una sbarra e la passa al secondo robot che provvede a metterla nella 61 posizione iniziale.
Controllo di Manipolatori (Calcolo delle Traiettorie 2)
") Controllo di Manipolatori (Calcolo delle Traiettorie 2) Ph.D Ing. Folgheraiter Michele Corso di Robotica Prof. Caglioti Anno Acc.. 2005/2006 Scelta della velocità nei punti di via con metodo Euristico:
Controllo di Manipolatori (Calcolo delle Traiettorie 2) Ph.D Ing. Folgheraiter Michele Corso di Robotica Prof. Caglioti Anno Acc.. 2005/2006 Scelta della velocità nei punti di via con metodo Euristico:
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Calcolatori Elettronici A a.a. 2008/2009
 Calcolatori Elettronici A a.a. 2008/2009 PRESTAZIONI DEL CALCOLATORE Massimiliano Giacomin Due dimensioni Tempo di risposta (o tempo di esecuzione): il tempo totale impiegato per eseguire un task (include
Calcolatori Elettronici A a.a. 2008/2009 PRESTAZIONI DEL CALCOLATORE Massimiliano Giacomin Due dimensioni Tempo di risposta (o tempo di esecuzione): il tempo totale impiegato per eseguire un task (include
MESSA IN SCALA DI ALGORITMI DIGITALI
 Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Application note. CalBatt NomoStor per i sistemi di accumulo di energia
 1. Panoramica Application note CalBatt NomoStor per i sistemi di accumulo di energia Gli Energy Management Systems () sono dispositivi atti al controllo dei flussi di energia dalle sorgenti di produzione
1. Panoramica Application note CalBatt NomoStor per i sistemi di accumulo di energia Gli Energy Management Systems () sono dispositivi atti al controllo dei flussi di energia dalle sorgenti di produzione
Anche nel caso che ci si muova e si regga una valigia il lavoro compiuto è nullo: la forza è verticale e lo spostamento orizzontale quindi F s =0 J.
 Lavoro Un concetto molto importante è quello di lavoro (di una forza) La definizione di tale quantità scalare è L= F dl (unità di misura joule J) Il concetto di lavoro richiede che ci sia uno spostamento,
Lavoro Un concetto molto importante è quello di lavoro (di una forza) La definizione di tale quantità scalare è L= F dl (unità di misura joule J) Il concetto di lavoro richiede che ci sia uno spostamento,
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
SISTEMI DI ACQUISIZIONE
 SISTEMI DI ACQUISIZIONE Introduzione Lo scopo dei sistemi di acquisizione dati è quello di controllo delle grandezze fisiche sia nella ricerca pura, nelle aziende e, per i piccoli utenti. I vantaggi sono:
SISTEMI DI ACQUISIZIONE Introduzione Lo scopo dei sistemi di acquisizione dati è quello di controllo delle grandezze fisiche sia nella ricerca pura, nelle aziende e, per i piccoli utenti. I vantaggi sono:
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Scheduling della CPU. Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux
 Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Prestazioni CPU Corso di Calcolatori Elettronici A 2007/2008 Sito Web:http://prometeo.ing.unibs.it/quarella Prof. G. Quarella prof@quarella.
 Prestazioni CPU Corso di Calcolatori Elettronici A 2007/2008 Sito Web:http://prometeo.ing.unibs.it/quarella Prof. G. Quarella prof@quarella.net Prestazioni Si valutano in maniera diversa a seconda dell
Prestazioni CPU Corso di Calcolatori Elettronici A 2007/2008 Sito Web:http://prometeo.ing.unibs.it/quarella Prof. G. Quarella prof@quarella.net Prestazioni Si valutano in maniera diversa a seconda dell
Controllori PID, metodi di taratura e problemi d implementazione
 Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
PROCEDURA INVENTARIO DI MAGAZZINO di FINE ESERCIZIO (dalla versione 3.2.0)
") PROCEDURA INVENTARIO DI MAGAZZINO di FINE ESERCIZIO (dalla versione 3.2.0) (Da effettuare non prima del 01/01/2011) Le istruzioni si basano su un azienda che ha circa 1000 articoli, che utilizza l ultimo
PROCEDURA INVENTARIO DI MAGAZZINO di FINE ESERCIZIO (dalla versione 3.2.0) (Da effettuare non prima del 01/01/2011) Le istruzioni si basano su un azienda che ha circa 1000 articoli, che utilizza l ultimo
Sistemi di Automazione Industriale
 Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
INTRODUZIONE AL CONTROLLO OTTIMO
 INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione.
 Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Con il termine Sistema operativo si fa riferimento all insieme dei moduli software di un sistema di elaborazione dati dedicati alla sua gestione. Compito fondamentale di un S.O. è infatti la gestione dell
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
Sistema operativo: Gestione della memoria
 Dipartimento di Elettronica ed Informazione Politecnico di Milano Informatica e CAD (c.i.) - ICA Prof. Pierluigi Plebani A.A. 2008/2009 Sistema operativo: Gestione della memoria La presente dispensa e
Dipartimento di Elettronica ed Informazione Politecnico di Milano Informatica e CAD (c.i.) - ICA Prof. Pierluigi Plebani A.A. 2008/2009 Sistema operativo: Gestione della memoria La presente dispensa e
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
Segnali e Sistemi. Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici. Gianni Borghesan e Giovanni Marro
 Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
. Si determina quindi quale distanza viene percorsa lungo l asse y in questo intervallo di tempo: h = v 0y ( d
 Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
Esercizio 1 Un automobile viaggia a velocità v 0 su una strada inclinata di un angolo θ rispetto alla superficie terrestre, e deve superare un burrone largo d (si veda la figura, in cui è indicato anche
19 Il campo elettrico - 3. Le linee del campo elettrico
 Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
Moto di una carica in un campo elettrico uniforme Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice se il campo elettrico è uniforme,
L informatica INTRODUZIONE. L informatica. Tassonomia: criteri. È la disciplina scientifica che studia
 L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
Sistema di acquisizione dati
 Sistema di acquisizione dati Ci sono innumerevoli ragioni sul perché é necessario acquisire informazioni dal mondo esterno: 1. Il controllo dei processi fisici che interessano la produzione industriale
Sistema di acquisizione dati Ci sono innumerevoli ragioni sul perché é necessario acquisire informazioni dal mondo esterno: 1. Il controllo dei processi fisici che interessano la produzione industriale
Interpolazione ed approssimazione di funzioni
 Interpolazione ed approssimazione di funzioni Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 9 novembre 2007 Outline 1 Polinomi Valutazione di un polinomio Algoritmo di Horner
Interpolazione ed approssimazione di funzioni Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 9 novembre 2007 Outline 1 Polinomi Valutazione di un polinomio Algoritmo di Horner
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi
 Capitolo 2 Controllo Cooperativo In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi intelligenti per gli Unmanned Aerial Vehicles (UAVs), cioè velivoli senza equipaggio
Capitolo 2 Controllo Cooperativo In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi intelligenti per gli Unmanned Aerial Vehicles (UAVs), cioè velivoli senza equipaggio
Introduzione alle misure con moduli multifunzione (DAQ)
") Facoltà di Ingegneria Università degli Studi di Firenze Dipartimento di Elettronica e Telecomunicazioni Introduzione alle misure con moduli multifunzione (DAQ) Ing. Andrea Zanobini - Maggio 2012 Dipartimento
Facoltà di Ingegneria Università degli Studi di Firenze Dipartimento di Elettronica e Telecomunicazioni Introduzione alle misure con moduli multifunzione (DAQ) Ing. Andrea Zanobini - Maggio 2012 Dipartimento
M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO. Indirizzo: ELETTRONICA E TELECOMUNICAZIONI
 M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTIALE COSO DI ODINAMENTO Indirizzo: ELETTONICA E TELECOMUNICAZIONI Tema di: ELETTONICA (Testo valevole per i corsi di ordinamento e per i corsi del progetto
M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTIALE COSO DI ODINAMENTO Indirizzo: ELETTONICA E TELECOMUNICAZIONI Tema di: ELETTONICA (Testo valevole per i corsi di ordinamento e per i corsi del progetto
Librerie digitali. Video. Gestione di video. Caratteristiche dei video. Video. Metadati associati ai video. Metadati associati ai video
 Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Documentazione esterna al software matematico sviluppato con MatLab
 Documentazione esterna al software matematico sviluppato con MatLab Algoritmi Metodo di Gauss-Seidel con sovrarilassamento Metodo delle Secanti Metodo di Newton Studente Amelio Francesco 556/00699 Anno
Documentazione esterna al software matematico sviluppato con MatLab Algoritmi Metodo di Gauss-Seidel con sovrarilassamento Metodo delle Secanti Metodo di Newton Studente Amelio Francesco 556/00699 Anno
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
Progettazione e realizzazione di un manipolatore elettromeccanico
 Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
Relazioni statistiche: regressione e correlazione
 Relazioni statistiche: regressione e correlazione È detto studio della connessione lo studio si occupa della ricerca di relazioni fra due variabili statistiche o fra una mutabile e una variabile statistica
Relazioni statistiche: regressione e correlazione È detto studio della connessione lo studio si occupa della ricerca di relazioni fra due variabili statistiche o fra una mutabile e una variabile statistica
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Esame di Stato 2015. Materia: SISTEMI AUTOMATICI PRIMA PARTE
 Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Ottimizzazione Multi Obiettivo
 Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
La pista del mio studio Riflettiamo sulla pista. Guida per l insegnante
 Riflettiamo sulla pista Guida per l insegnante Obiettivi educativi generali Compito di specificazione - possiede capacità progettuale - è in grado di organizzare il proprio tempo e di costruire piani per
Riflettiamo sulla pista Guida per l insegnante Obiettivi educativi generali Compito di specificazione - possiede capacità progettuale - è in grado di organizzare il proprio tempo e di costruire piani per
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
CABINE ELETTRICHE DI TRASFORMAZIONE
 Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
Cabtrasf_parte_prima 1 di 8 CABINE ELETTRICHE DI TRASFORMAZIONE parte prima Una cabina elettrica è il complesso di conduttori, apparecchiature e macchine atto a eseguire almeno una delle seguenti funzioni:
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
Basi di matematica per il corso di micro
 Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
Gestione della memoria centrale
 Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
INTEGRATORE E DERIVATORE REALI
 INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
Il memory manager. Gestione della memoria centrale
 Il memory manager Gestione della memoria centrale La memoria La memoria RAM è un vettore molto grande di WORD cioè celle elementari a 16bit, 32bit, 64bit (2Byte, 4Byte, 8Byte) o altre misure a seconda
Il memory manager Gestione della memoria centrale La memoria La memoria RAM è un vettore molto grande di WORD cioè celle elementari a 16bit, 32bit, 64bit (2Byte, 4Byte, 8Byte) o altre misure a seconda
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale (Prof. Rocco) Appello del 27 Febbraio 2008 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa la copertina).
Controllo del moto e robotica industriale (Prof. Rocco) Appello del 27 Febbraio 2008 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa la copertina).
la scienza della rappresentazione e della elaborazione dell informazione
 Sistema binario Sommario informatica rappresentare informazioni la differenza Analogico/Digitale i sistemi di numerazione posizionali il sistema binario Informatica Definizione la scienza della rappresentazione
Sistema binario Sommario informatica rappresentare informazioni la differenza Analogico/Digitale i sistemi di numerazione posizionali il sistema binario Informatica Definizione la scienza della rappresentazione
e-dva - eni-depth Velocity Analysis
 Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
Lo scopo dell Analisi di Velocità di Migrazione (MVA) è quello di ottenere un modello della velocità nel sottosuolo che abbia dei tempi di riflessione compatibili con quelli osservati nei dati. Ciò significa
L IDENTIFICAZIONE STRUTTURALE
 e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
ISTRUZIONI PER LA GESTIONE BUDGET
 ISTRUZIONI PER LA GESTIONE BUDGET 1) OPERAZIONI PRELIMINARI PER LA GESTIONE BUDGET...1 2) INSERIMENTO E GESTIONE BUDGET PER LA PREVISIONE...4 3) STAMPA DIFFERENZE CAPITOLI/BUDGET.10 4) ANNULLAMENTO BUDGET
ISTRUZIONI PER LA GESTIONE BUDGET 1) OPERAZIONI PRELIMINARI PER LA GESTIONE BUDGET...1 2) INSERIMENTO E GESTIONE BUDGET PER LA PREVISIONE...4 3) STAMPA DIFFERENZE CAPITOLI/BUDGET.10 4) ANNULLAMENTO BUDGET
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Intelligenza Artificiale
 Intelligenza Artificiale Esercizi e Domande di Esame Tecniche di Ricerca e Pianificazione Esercizi Griglia Si consideri un ambiente costituito da una griglia n n in cui si muove un agente che può spostarsi
Intelligenza Artificiale Esercizi e Domande di Esame Tecniche di Ricerca e Pianificazione Esercizi Griglia Si consideri un ambiente costituito da una griglia n n in cui si muove un agente che può spostarsi
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Modulo di Meccanica e Termodinamica
 Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
6 Cenni sulla dinamica dei motori in corrente continua
 6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
Rappresentazione nello spazio degli stati
 Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Manuale Terminal Manager 2.0
 Manuale Terminal Manager 2.0 CREAZIONE / MODIFICA / CANCELLAZIONE TERMINALI Tramite il pulsante NUOVO possiamo aggiungere un terminale alla lista del nostro impianto. Comparirà una finestra che permette
Manuale Terminal Manager 2.0 CREAZIONE / MODIFICA / CANCELLAZIONE TERMINALI Tramite il pulsante NUOVO possiamo aggiungere un terminale alla lista del nostro impianto. Comparirà una finestra che permette
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
Lezione 8. La macchina universale
 Lezione 8 Algoritmi La macchina universale Un elaboratore o computer è una macchina digitale, elettronica, automatica capace di effettuare trasformazioni o elaborazioni su i dati digitale= l informazione
Lezione 8 Algoritmi La macchina universale Un elaboratore o computer è una macchina digitale, elettronica, automatica capace di effettuare trasformazioni o elaborazioni su i dati digitale= l informazione
Software per Helpdesk
 Software per Helpdesk Padova - maggio 2010 Antonio Dalvit - www.antoniodalvit.com Cosa è un helpdesk? Un help desk è un servizio che fornisce informazioni e assistenza ad utenti che hanno problemi nella
Software per Helpdesk Padova - maggio 2010 Antonio Dalvit - www.antoniodalvit.com Cosa è un helpdesk? Un help desk è un servizio che fornisce informazioni e assistenza ad utenti che hanno problemi nella
Federico Laschi. Conclusioni
 Lo scopo di questa tesi è stato quello di proporre alcuni algoritmi di allocazione dinamica della capacità trasmissiva, basati su tecniche di predizione on-line dei processi di traffico. Come prima analisi
Lo scopo di questa tesi è stato quello di proporre alcuni algoritmi di allocazione dinamica della capacità trasmissiva, basati su tecniche di predizione on-line dei processi di traffico. Come prima analisi
Approccio stratificato
 Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Introduzione all acquisizione Dati
 Introduzione all acquisizione Dati Laboratorio di Robotica Industriale Evoluzione della strumentazione Introduzione all acquisizione dati - 2 Trend nella strumentazione Introduzione all acquisizione dati
Introduzione all acquisizione Dati Laboratorio di Robotica Industriale Evoluzione della strumentazione Introduzione all acquisizione dati - 2 Trend nella strumentazione Introduzione all acquisizione dati
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale. 1/6 www.ni.com
 RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
Spline Nurbs. IUAV Disegno Digitale. Camillo Trevisan
 Spline Nurbs IUAV Disegno Digitale Camillo Trevisan Spline e Nurbs Negli anni 70 e 80 del secolo scorso nelle aziende si è iniziata a sentire l esigenza di concentrare in un unica rappresentazione gestita
Spline Nurbs IUAV Disegno Digitale Camillo Trevisan Spline e Nurbs Negli anni 70 e 80 del secolo scorso nelle aziende si è iniziata a sentire l esigenza di concentrare in un unica rappresentazione gestita
Tecniche per l analisi della postura e del movimento
 Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Architettura hardware
 Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
MOTO DI UNA CARICA IN UN CAMPO ELETTRICO UNIFORME
 6. IL CONDNSATOR FNOMNI DI LTTROSTATICA MOTO DI UNA CARICA IN UN CAMPO LTTRICO UNIFORM Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice
6. IL CONDNSATOR FNOMNI DI LTTROSTATICA MOTO DI UNA CARICA IN UN CAMPO LTTRICO UNIFORM Il moto di una particella carica in un campo elettrico è in generale molto complesso; il problema risulta più semplice
Fasi di creazione di un programma
 Fasi di creazione di un programma 1. Studio Preliminare 2. Analisi del Sistema 6. Manutenzione e Test 3. Progettazione 5. Implementazione 4. Sviluppo 41 Sviluppo di programmi Per la costruzione di un programma
Fasi di creazione di un programma 1. Studio Preliminare 2. Analisi del Sistema 6. Manutenzione e Test 3. Progettazione 5. Implementazione 4. Sviluppo 41 Sviluppo di programmi Per la costruzione di un programma
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
IL PROBLEMA DELLE SCORTE
 IL PROBLEMA DELLE SCORTE Un problema di Ricerca Operativa, di notevole interesse pratico, è il problema della gestione delle scorte, detto anche di controllo delle giacenze di magazzino. Esso riguarda
IL PROBLEMA DELLE SCORTE Un problema di Ricerca Operativa, di notevole interesse pratico, è il problema della gestione delle scorte, detto anche di controllo delle giacenze di magazzino. Esso riguarda
Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base
 Sistema operativo Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base Architettura a strati di un calcolatore
Sistema operativo Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base Architettura a strati di un calcolatore
CPU. Maurizio Palesi
 CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
2. Leggi finanziarie di capitalizzazione
 2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
CHIUSURE di MAGAZZINO di FINE ANNO
 CHIUSURE di MAGAZZINO di FINE ANNO Operazioni da svolgere per il riporto delle giacenze di fine esercizio Il documento che segue ha lo scopo di illustrare le operazioni che devono essere eseguite per:
CHIUSURE di MAGAZZINO di FINE ANNO Operazioni da svolgere per il riporto delle giacenze di fine esercizio Il documento che segue ha lo scopo di illustrare le operazioni che devono essere eseguite per: