I.T.I. Modesto PANETTI B A R I Presidenza Fax
|
|
|
- Agostina Ferrari
- 8 anni fa
- Visualizzazioni
Transcript
1 I.T.I. Modesto PANETTI B A R I Via Re David, BARI Presidenza Fax Classe 5 Elettronica e Telecomunicazioni sez B. a.s. 2004/2005 Alunni: BOZZI PASQUALE - VITALE GIUSEPPE Docente: Prof. ETTORE PANELLA RELAZIONE DI SISTEMI SUL PLC SIEMENS Che cosa sono: I PLC (Programmable Logic Controller) sono quei dispositivi strutturalmente simili ai PC ma che diversificano negli organi di Ingresso e di uscita. Questi accettano come segnali d'ingresso valori digitali del tipo ON-OFF o segnali analogici di tensione-corrente variabili e restituiscono all'uscita segnali uguali a quelli d'ingresso. I segnali d'ingresso vengono opportunamente elaborati dal software nella CPU che a sua volta comanda le uscite secondo la logica del software. Il software di programmazione risiede nella memoria EEPROM dove viene prelevato dalla CPU ed elaborato. I PLC sono provvisti di una porta di comunicazione che permette di trasferire sul PC, tutti gli stati delle variabili, degli ingressi e delle uscite, dei contatori, dei temporizzatori, ecc. La programmazione dei PLC varia, anche se di poco, tra marca e marca, pertanto per ogni tipo di PLC è necessario avere il suo programma, la sua connessione per il trasferimento dei dati (chiave fisica), il suo manuale. SVILUPPO STORICO: I controllori logici programmabili furono introdotti, negli Stati Uniti, verso la fine degli anni 60 allo scopo di ridurre i sempre più elevati costi e complessità dei controlli. La realizzazione dei controlli dei nuovi apparati introdotti sul mercato, infatti, avrebbe avuto bisogno di circuiti con centinaia o migliaia di relè. Nella metà degli anni 70 la tecnologia dominante dei PLC era basata su dispositivi sequenziali. La capacità di far comunicare tra loro i PLC iniziò intorno al 1973 con la realizzazione del Modbus relativo al Modicon. Sfortunatamente la mancanza di standardizzazione produsse una serie di protocolli e reti incompatibili così da rendere la comunicazione tra PLC di costruttori diversi quasi impossibili. Negli anni 80 la General Motors tentò di standardizzare la comunicazione con un protocollo denominato MAP ( Manufacturing Automation Protocol ) ed allo stesso tempo rese programmabili i PLC attraverso personal computer, invece che con tastiere dedicate o programmazioni manuali. Negli anni 90 si è ottenuta una notevole riduzione degli ingombri dei PLC ed una graduale unificazione dei protocolli. Attualmente i PLC possono essere programmati in linguaggio C, schemi a scala, diagrammi a blocchi funzionali, liste di istruzione ed altro ancora. 1

2 INTRODUZIONE: I controlli logici programmabili, indicati come PLC (Programmable Logic Controller) sono apparecchi elettronici basati sul microprocessore e furono inventati per sostituire i circuiti sequenziali realizzati a relè. Si può affermare che il PLC lavora portando ON oppure OFF le sue uscite sulla base dello stato degli ingressi e di un programma, realizzato appositamente dall utilizzatore, per ottenere i risultati desiderati. Le norme CEI danno la seguente definizione: Il controllore a logica programmabile o controllore programmabile, è un sistema elettronico a funzionamento digitale, destinato all uso in ambito industriale. Sia il CP sia le periferiche associate sono stati progettati in modo da poter essere facilmente integrati in un sistema di controllo industriale e utilizzati in tutte le funzioni previste. Numerose sono le norme CEI che riguardano i controlli programmabili. Un elenco essenziale è il seguente: - CEI Riguarda la preparazione dei diagrammi funzionali per sistemi di comando e controllo. - CEI Si occupa della sicurezza del macchinario. - CEI Si occupa delle informazioni generali circa i PLC. - CEI Descrive le prove tecniche e meccaniche. - CEI Riguarda i diversi linguaggi di programmazione dei PLC. - CEI Si riferisce alla compatibilità elettromagnetica (norma generica sull emissione). - CEI Riguarda la compatibilità elettromagnetica (norma tecnica sull immunità). I PLC sono impiegati in moltissime applicazioni industriali ove occorrano controlli elettronici dei tipi più disparati quali: - macchine utensili ed operatrici automatiche; - macchine da stampa; - macchine per la lavorazione del legno; - impianti di dosaggio e miscelazione; - controlli di processo nell industria chimica, siderurgica, metallurgica; - impianti di trattamento delle acque; - sistemi di immagazzinamento automatico. Alcune delle qualità che li fanno preferire sono le seguenti: - funzionamento a bassa tensione e bassi valori di correnti. - risultano leggeri, poco ingombranti, e possono essere sistemati facilmente in qualsiasi posizione. - elevata flessibilità. - possibilità di interfacciamento con video Per questi motivi spesso sono una valida alternativa, anche in termini di costi e ingombri. Il PLC consiste principalmente una CPU. Può essere immaginata come una scatola contenente migliaia di relè, insieme a contatori, temporizzatori e memorie per dati. In realtà tutti questi oggetti non esistono fisicamente all interno della scatola, dato che sono simulati dal microprocessore. Circuiti o moduli d ingresso: servono al PLC per ricevere segnali dal mondo esterno. Circuiti o moduli d uscita: vengono impiegati dal PLC per inviare i comandi in uscita. CPU: è l unità centrale contenente il microprocessore, le memorie RAM ed EPROM, i circuiti di clock e quelli necessari al loro funzionamento. Dispositivo di programmazione ed interfaccia con l operazione: sono gli elementi necessari per programmare il PLC e per controllarne lo stato. 2

3 Inoltre, si può immaginare che all interno della CPU siano presenti i seguenti elementi. Circuiti o relè interni: essi non esistono fisicamente ma si può immaginarli simulati dalla CPU. Contatori: possono essere sia simulati dal software che realizzati dall hardware. Temporizzatori: sono simulati dal software e realizzano principalmente la funzione di flip-flop. Memoria dei dati: è costituita da registri che sono impiegati per la temporanea memorizzazione di dati durante l esercitazione di un programma. Memoria di programma: è la memoria che contiene il programma realizzato dall operatore. Un PLC lavora scorrendo, continuamente e ciclicamente, un programma. Lettura dello stato di ingresso: durante questa fase il PLC controlla in che stato, ON oppure OFF, si trova ciascuno dei suoi ingressi. A questi ingressi sono collegati i vari sensori, finecorsa, interruttori, pulsanti, che servono per conoscere in quali condizioni si trova la macchina alla quale il PLC è collegato e per inviare comandi. Il PLC registra questi dati nella sua memoria per usarli durante il passo successivamente. Esecuzione del programma: il PLC esegue il programma un istruzione alla volta, in base alle informazioni ricevute dai suoi ingressi, prende delle decisioni per far eseguire alla macchina controllata la sequenza opportuna. Aggiornamento dello stato delle uscite: le uscite servono a comandare la macchina che il PLC deve controllare. Lo stato ON oppure OFF di ciascuna uscita viene cambiato oppure no, nella terza fase in base alle letture degli ingressi. Eseguito il terzo passo, il PLC ritorna al primo passo per ricominciare la sequenza e ripeterla continuamente. I tecnici che lavorano con i PLC usano comunemente alcuni termini particolari. Di seguito è dato una breve spiegazione di quelli più impiegati. Sensore: un sensore è un congegno che converte una grandezza fisica in un segnale elettrico. I sensori sono connessi agli ingressi del PLC. Esistono sensori di fine corsa, di posizione, di temperature ecc. Un semplice esempio di sensore è costituito da un pulsante. Attuatore: un attuatore svolge la funzione inversa del sensore: converte un segnale elettrico in una grandezza fisica. Ingresso digitale: è anche chiamato ingresso discreto. Accetta solo segnali di tipo ON/OFF. Esempi di segnali discreti che possono essere connessi a questi ingressi sono, oltre a quelli provenienti dalla porte logiche, quelli prodotti da pulsanti, interruttori,finecorsa,contatti meccanici. Uscita analogica: l uscita analogica è quella che può emettere segnali di valore variabile con continuità da un minimo ad un massimo. Un esempio è costituito da una tensione continua che può variare tra 0 e 10 V. CPU: questo acronimo è formato con le iniziali delle parole inglesi Central Processing Unit. E l unità centrale del sistema, che contiene il microprocessore e la memoria. Gli elementi che caratterizzano un PLC sono essenzialmente due. Il primo è costituito dalla velocità di esecuzione delle operazioni e dal loro tipo e numero. Il secondo è dato dalla possibilità di interfacciamento verso l esterno con segnali di tipo digitali o analogico. La vera e propria interfaccia fisica tra il PLC e la macchina, avviene attraverso schede o moduli di ingresso/uscita che acquisiscono o inviano segnali digitali o analogici. Tutti i costruttori dei PLC ne offrono una grande varietà per adattarsi ai diversi tipi di sensori ed ai diversi comandi da erogare. Si hanno PLC di: gamma bassa, quando controllano fino a 64 I/O gamma media, quando controllano tra 64 e 512 I/O gamma alta, quando controllano più di 512 I/O. 3

4 Si dicono compatti o monoblocco i PLC che si presentano in una configurazione rigida che non può essere quasi mai modificata. Si dicono invece modulari, quelli che sono configurabili a piacere dall utente in base alle sue esigenze. L interfaccia con l operatore si utilizza in fase di programmazione e per il controllo dei dati nel corso del processo. I linguaggi di programmazione dei PLC sono normalizzati secondo uno standard mondiale il quale definisce come strutturare il programma e quattro diversi linguaggi che sono: a) lista di istruzioni ( Instruction list = IL); b) diagrammi a scala o a contatti ( Ladder Diagram = LD ); c) diagramma a blocchi funzionali ( Function Block Diagram = FBD ); d) linguaggi strutturati, tipo il C ( Structured Text = ST ) Lista di istruzioni: è un linguaggio assembly ispirato a quello dei microprocessori Diagrammi ladder: sono nati per facilitare gli operatori che utilizzavano abitualmente gli schemi elettromeccanici a relè. IL LINGUAGGIO KOP: Il linguaggio a contatti (KOP) è un linguaggio grafico che presenta delle analogie con gli schemi elettrici. Quando si scrive un programma in KOP, si utilizzano componenti grafici e li si organizza in modo da creare segmenti logici. Il programma viene creato utilizzando i seguenti tipi di elementi: Contatti. Si tratta di interruttori che vengono attraversati dal flusso di corrente. Generalmente la corrente passa attraverso un contatto aperto solo quando è chiuso (valore logico pari a uno) e passa attraverso un contatto chiuso o negato (NOT) solo quando è aperto (valore logico pari a zero). Bobine. Sono relé che vengono eccitati dal flusso della corrente. Box. Si tratta di una funzione (ad esempio, un temporizzatore, un contatore o un'operazione matematica) che viene eseguita quando il flusso di corrente raggiunge il box. Un segmento è composto da questi elementi e costituisce un circuito completo. La corrente scorre partendo dalla barra di alimentazione sinistra (rappresentata nell'editor KOP da una linea verticale sul lato sinistro della finestra) attraverso i contatti chiusi per andare ad eccitare le bobine o i box. COME COLLEGARE IL PLC AL COMPUTER: Il tipo di comunicazione tra il PC in cui si sta eseguendo STEP 7-Micro/WIN 32 e la CPU dipende dall'hardware installato. Se si decide di collegare il PC alla CPU semplicemente con un cavo PC/PPI, non si deve far altro che collegare il cavo e confermare i parametri di default assegnati al PC e alla CPU durante l'installazione di STEP 7-Micro/WIN 32. È possibile stabilire la comunicazione e modificare le relative impostazioni in qualsiasi momento. Di seguito sono elencate le operazioni necessarie per stabilire la comunicazione: Connettere un cavo tra la CPU e il PC sul quale è installato STEP 7-Micro/WIN 32. Per connessioni PC/PPI semplici, impostare i microinterruttori su 9600 baud, DCE, 11 bit. Se si utilizza un modem o una scheda di comunicazione, consultare le istruzioni di installazione fornite con l'hardware. Accertarsi che il tipo di CPU selezionato in STEP 7-Micro/WIN 32 corrisponda a quello che si sta utilizzando. 4
 lista di istruzioni (")
5 Se si utilizza un collegamento PC/PPI semplice, si può confermare il protocollo di comunicazione visualizzato per default nella finestra di dialogo "Impostazione interfaccia PG/PC" durante l'installazione di STEP 7-Micro/WIN 32. In alternativa selezionare un protocollo di comunicazione diverso e controllare i parametri (indirizzo della stazione, velocità di trasmissione ecc.) del PC nella finestra di dialogo "Impostazione interfaccia PG/PC". Controllare la configurazione (indirizzo della stazione, velocità di trasmissione ecc.) della CPU nella scheda Porte di Blocco di sistema. Se necessario, apportare delle modifiche e caricare il blocco di sistema modificato. Nella figura seguente viene riportata la schermata principale del programma STEP 7-Micro/WIN 32. 5
 della CPU nella scheda Porte di Blocco di sistema. Se necessario, apportare delle modifiche e caricare il blocco di sistema modificato.")
6 Esempio di manuale Siemens per scopi didattici INDIRIZZAMENTO DIRETTO DELLE AREE DI MEMORIA DELLA CPU La CPU memorizza informazioni in diverse posizioni di memoria che hanno indirizzi unici. La memoria dati di S7-200 consiste di cinque aree: I Ingresso Q Uscita M Merker interno SM Merker speciale S Memoria S V Memoria variabile Per utilizzare un indirizzo di memoria si compone l'indirizzo utilizzando il tipo e il numero di memoria. Si può accedere alle aree di memoria in formato bit, byte, parola o doppia parola. 6

7 Esempio di programmazione ladder Contatti standard (operazioni logiche combinatorie a bit) Ingressi/Uscite Operandi Tipi di dati Bit I, Q, M, SM, T, C, V, S, L BOOL Queste operazioni ricavano il valore indirizzato dalla memoria o dal registro dell'immagine di processo quando il tipo di dati è I o Q. Il Contatto normalmente aperto (LD, A, O) è chiuso (on) quando il bit vale 1. Il Contatto normalmente chiuso (LDN, AN, ON) è chiuso (on) quando il bit vale 0. In KOP le operazioni normalmente aperte e normalmente chiuse sono rappresentate mediante contatti rappresentati in figura Esempio di programma NETWORK 1: I contatti n. a. I0.0 AND I0.1 devono essere on (chiusi) per attivare Q0.0. Il contatto Not agisce come un invertitore. In modo RUN, Q0.0 e Q0.1 hanno stati logici opposti. PILOTAGGIO DI MOTORI TRAMITE IL PLC Attraverso l utilizzo del PLC abbiamo pilotato tre diversi tipi di motori: motore in corrente alternata, motore passo-passo e motore in corrente continua. Di seguito si riportano le informazioni sui tre motori, con le rispettive schermate del programma STEP 7 MICRO/WIN 32, con cui si è operato. Motore in corrente alternata Sono macchine elettriche rotanti, usate per convertire energia elettrica in energia meccanica o viceversa. In particolare, le macchine che trasformano energia elettrica in energia meccanica sono dette motori elettrici, quelle che eseguono l'operazione inversa sono invece chiamate generatori elettrici. Il funzionamento delle macchine elettriche rotanti si basa su due fenomeni fisici correlati. Il primo è il fenomeno dell'induzione elettromagnetica, scoperto nel 1831 dal fisico britannico Michael Faraday: se un conduttore si sposta in un campo magnetico, o più precisamente, se varia il flusso concatenato con il conduttore, viene indotta una corrente elettrica. Il secondo fenomeno fu invece osservato per la prima volta nel 1820 dal fisico francese André- Marie Ampère: un conduttore percorso da corrente immerso in un campo magnetico è sottoposto a una forza che dipende dalla geometria del sistema. Si mostra una semplice schematizzazione di una macchina elettrica rotante. 7

8 I motori in corrente alternata maggiormente utilizzati nel campo dell automazione industriale di bassa potenza sono: 1) Motore monofase. È il classico motore in c.a. utilizzato in molti elettrodomestici come lavatrici, lucidatrici, etc. 2) Motore universale. È un motore di piccola potenza impiegati in alcuni elettrodomestici come frullatori e ventilatori. 3) Motore bifase. È un motore utilizzato nei servomeccanismi di posizione e velocità ad elevata precisione con comando in corrente alternata. È normalmente impiegato per potenze fino ad alcune centinaia di watt. Nei sistemi di elevata potenza si impiegano i motori trifase in grado di operare su carichi anche di diverse migliaia di KW. Il motore bifase consente la selezione del verso di rotazione. Tale motore dispone di tre contatti denominati Se la tensione di rete a 220 V alimenta i contatti 1-2 il motore si muove in un verso se l alimentazione giunge sui contatti 1-3 il motore ruota nel verso opposto. In tal modo è molto semplice controllare il verso di rotazione del motore. Questo tipo di motore è impiegato nel movimento dei cancelli, delle tapparelle per finestre, ecc. Si riporta il listato del programma per il comando del motore in corrente alternata bifase con controllo del verso di rotazione. 8

9 9

10 Tabella dei simboli Motore passo-passo I motori passo-passo sono motori che, a differenza di tutti gli altri, hanno come scopo quello di mantenere fermo l'albero in una posizione di equilibrio: se alimentati si limitano infatti a bloccarsi in una ben precisa posizione angolare. Solo indirettamente è possibile ottenerne la rotazione: occorre inviare al motore una serie di impulsi di corrente, secondo un'opportuna sequenza in modo tale da far spostare, per scatti successivi, la posizione di equilibrio. E' così possibile far ruotare l'albero nella posizione e alla velocità voluta semplicemente contando gli impulsi ed impostando la loro frequenza, visto che le posizioni di equilibrio dell'albero sono determinate meccanicamente con estrema precisione. I vantaggi dei motori passo-passo: 10

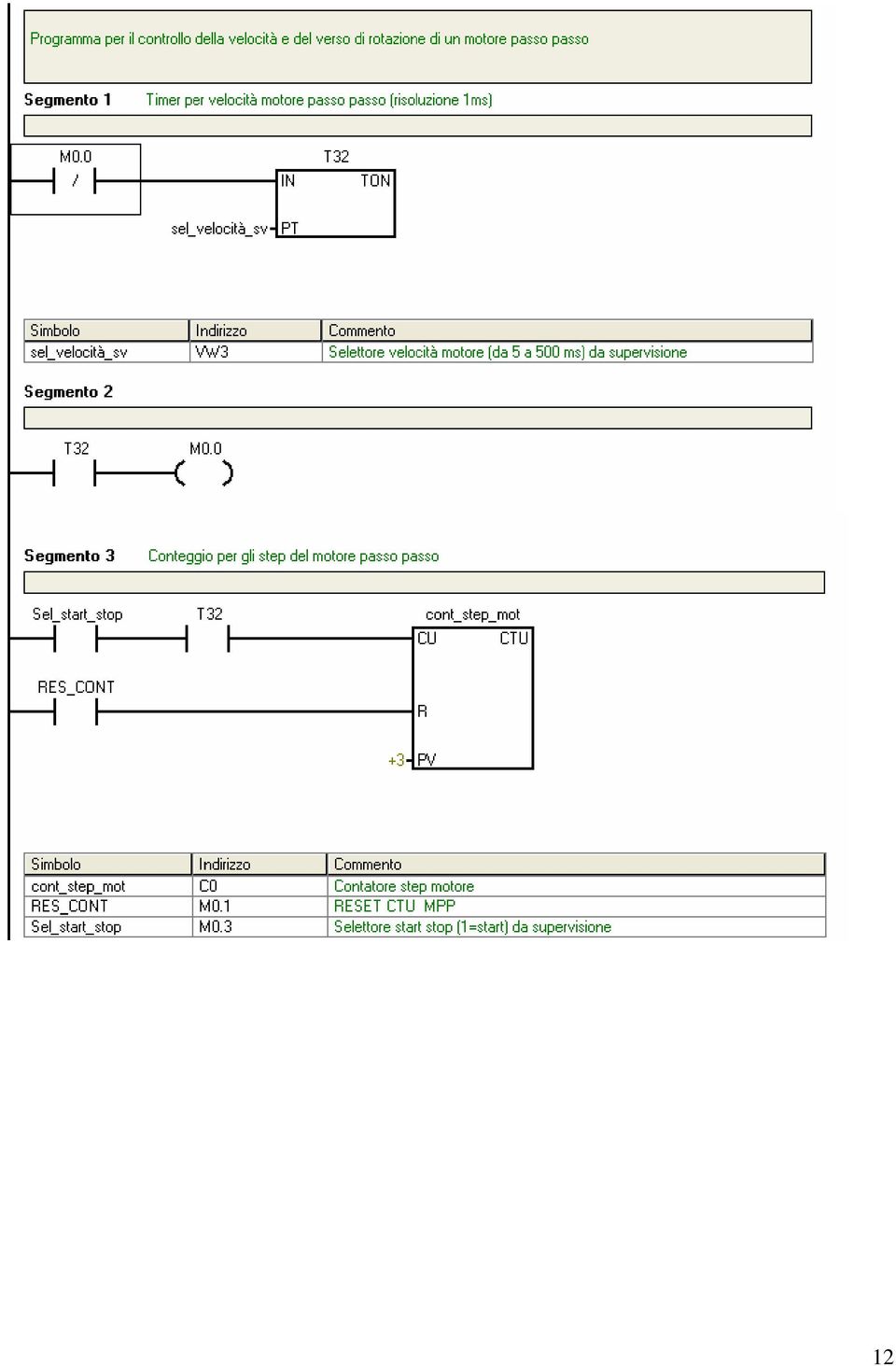
11 E' possibile realizzare azionamenti di precisione controllati da computer in catena aperta, cioè senza utilizzare sensori di posizione o di velocità. Sono quindi utilizzabili con relativa semplicità e senza richiedere particolare potenza di calcolo. Hanno un'elevata robustezza meccanica ed elettrica: infatti non esistono contatti elettrici striscianti e, se necessario, possono essere realizzati anche in esecuzione completamente stagna. E' facile far compiere all'albero piccole rotazioni angolari arbitrarie in ambedue i versi e bloccarlo in una determinata posizione. La velocità di rotazione può essere molto bassa anche senza l'uso di riduttori meccanici. Ovviamente hanno anche difetti: Richiedono sempre circuiti elettronici per il pilotaggio, in genere di tipo digitale. Hanno un funzionano a scatti e con forti vibrazioni, soprattutto ai bassi regimi e se si adottano le tecniche di pilotaggio più semplici. Il loro rendimento energetico è basso e, in genere, la potenza meccanica è piccola. Hanno un costo elevato, relativamente ad altri tipi di motore con analoghe prestazioni. Difficilmente raggiungono velocità di rotazione elevate. Si riporta la nota tabella per la sequenza di pilotaggio delle fasi di un motore passo-passo unipolare nella modalità full-step: CK A B C D Tabella dei simboli Programma Si riporta il listato del programma per il comando del motore passo-passo 11

12 12
13 13

14 14

15 Motore in corrente continua con comando PWM Nei sistemi di controllo industriale i motori in corrente continua occupano certamente un posto in primo piano. Sono dispositivi in grado di trasformare una tensione continua d entrata in una coppia motrice in uscita, quindi energia elettrica in meccanica. Nella seguente figura è mostrata la schematizzazione costruttiva di un motore in corrente continua ad eccitazione indipendente. Un motore in c.c. è costituito da uno statore e da un rotore. Lo statore genera un flusso magnetico il cui valore dipende dall intensità di corrente I C del circuito di eccitazione. Il rotore è posto entro le espansioni polari dello statore. Esso è costituito di materiale ferroso o plastico, e presenta sulla periferia delle cave entro le quali è posto un avvolgimento da cui vengono derivati dei conduttori che sono connessi,in modo opportuno, alle lamelle di un dispositivo denominato collettore. Sul collettore poggiano dei contatti striscianti (spazzole) generalmente di carbone attraverso cui si alimenta il motore.il rotore, le spazzole e il collettore costituiscono il circuito d armatura del motore. Con V a e I a si indicano rispettivamente la tensione e la corrente di armatura o alimentazione del motore. Lo statore insieme all avvolgimento di eccitazione, costituisce il circuito di campo cui applicare la tensione V c e la corrente I c che definiscono il campo magnetico induttore. Sono possibili altri due modi di eccitazione. 1. eccitazione serie 2. eccitazione parallela Quando si alimenta il motore, la corrente I a di armatura che circola negli avvolgimenti rotorici interagisce con il campo magnetico di statore generando una forza magnetomotrice che pone il rotazione il rotore. Tale movimento produce per induzione elettromagnetica una forza controelettromotrice E che si oppone alla tensione V a di armatura. Affinché possa circolare la corrente I a che tiene in movimento il motore, la tensione V a a regime, deve equilibrare sia la f.c.e.m. E che la caduta di tensione R a I a nella resistenza del circuito di armatura. 15

16 V = E + R a Si osservi che, essendo il motore alimentato in continua, l effetto dell induttanza di armatura L a è nullo a regime. La f.c.e.m. E è legata alla velocità di rotazione dalla seguente relazione: V n = E = Knφ dove K è una costante costruttiva del motore,n il numero di giri al minuto e l intensità del flusso magnetico induttore. Combinando la formula precedente con la successiva, si ricava: a a I a RaI a Va Kφ Kφ essendo R a I a trascurabile rispetto a V a. La precedente indica che la velocità di rotazione di un motore c.c. è direttamente proporzionale alla tensione di alimentazione V a. Per il principio di conservazione dell energia e supponendo trascurabili le perdite, la potenza elettrica fornita al motore P a = V a I a deve uguagliare quella meccanica di rotazione P m = C m. In particolare si è indicato che con C m la coppia motrice e con ω= 2πn, la velocità angolare. Si ha quindi: Ponendo K m =60K/2π, si ricava: C ω = V C m m m a I = K φi La formula precedente mostra che la coppia motrice C m è proporzionale al flusso induttore e alla corrente di armatura. a a CIRCUITO DI COMANDO DEL MOTORE V a Il segnale V i è costituito da un treno di onde rettangolari a frequenza 10 KHz. Supponendo che il BJT commuti tra la saturazione e l interdizione, la tensione di alimentazione del motore, trascurando V Cesat = 0.3 V assume il seguente andamento. 16

17 Il motore è equivalente ad un carico induttivo e si comporta come un filtro passa basso con frequenza di taglio di alcune decine di Hz, imposta dalla costante di tempo meccanica τ m. La tensione impulsiva di comando viene, quindi, mediata dall azione filtrante del motore che, a tutti gli effetti, è come se fosse alimentato da una tensione efficace V pari a: V 1 = T T 0 V 2 a dt = V 2 a T1 T = V a D La precedente relazione mostra che è possibile regolare la velocità di rotazione del motore agendo sul duty-cycle D del segnale rettangolare di comando. Tabella dei simboli Programma Si riporta il listato del programma per il comando del motore in corrente continua 17

18 Confronto delle caratteristiche degli editor: KOP, FUP, AWL (GS 2.5) Le CPU S7-200 SIMATIC mettono a disposizione svariati tipi di operazioni che consentono di svolgere un'ampia gamma di compiti di automazione. Nella CPU S7-200 sono disponibili due set di operazioni di base: 18

19 SIMATIC IEC STEP 7-Micro/WIN 32 consente di scegliere tra diversi editor che permettono di creare programmi di controllo con queste operazioni. L'utente può, ad esempio, scegliere di creare il programma in un ambiente grafico oppure preferire un tipo di editor basato sul linguaggio testuale. Per fare una scelta, occorre considerare i due seguenti aspetti fondamentali della creazione dei programmi. Il tipo di set di operazioni migliore per l'applicazione specifica:simatic oppure IEC Il tipo di editor più adatto alle esigenze di programmazione specifiche: lista istruzioni, schema a contatti o schema logico. Sono possibili le seguenti combinazioni di set di operazioni ed editor: Set di operazioni SIMATIC con l'editor KOP, FUP e AWL Set di operazioni IEC con l'editor LD (KOP) o FBD (FUP) EDITOR KOP L'editor KOP di STEP 7-Micro/WIN 32 consente di creare programmi simili a circuiti elettrici. La programmazione in KOP è il metodo scelto da molti programmatori di PLC e addetti alla manutenzione ed è un ottimo linguaggio per i programmatori meno esperti. I programmi KOP consentono alla CPU di simulare il flusso della corrente elettrica che proviene da una sorgente e attraversa una serie di condizioni logiche di ingresso, che a loro volta abilitano condizioni logiche di uscita. La logica è suddivisa in "network" o "segmenti". Il programma viene eseguito un segmento per volta, da sinistra a destra e dall'alto verso il basso in base alle indicazioni del programma stesso. Una volta che la CPU ha raggiunto la fine del programma, ricomincia dall'inizio. La seguente figura illustra un esempio di programma KOP. Le varie operazioni sono rappresentate mediante simboli grafici e sono di tre tipi fondamentali: 19

20 I contatti: rappresentano le condizioni logiche di ingresso in modo analogo a interruttori, pulsanti, condizioni interne, ecc. Le bobine: solitamente rappresentano i risultati logici di uscita in modo analogo a lampade, avviatori per motori, relè di interposizione, condizioni interne di uscita, ecc. I box: appresentano le altre operazioni in modo analogo a temporizzatori, contatori o operazioni matematiche. I segmenti KOP possono essere semplici o molto complessi. È possibile creare segmenti con uscite intermedie e collegare in serie più box. Le operazioni dei box che possono essere collegate in serie vengono etichettate con la linea ENO (enable output). Se un box ha un flusso di corrente in un ingresso EN e viene eseguito senza errori, l'uscita ENO passa il flusso di corrente all'elemento successivo. ENO può essere utilizzata come bit di attivazione che indica la corretta esecuzione di un'operazione. Il bit ENO viene utilizzato con l'inizio dello stack per influire sul flusso di corrente ed eseguire sequenze di operazioni successive. Avvertenza: È possibile utilizzare la funzione ENO con il software di programmazione STEP 7-Micro/WIN 32 versione 3.0 (o successiva) solo se si sta usando una CPU 221, CPU 222, CPU 224, CPU 226 o CPU 226XM. Le caratteristiche principali da considerare nella scelta dell'editor KOP sono le seguenti: Lo schema a contatti è facilmente utilizzabile dai programmatori poco esperti. La rappresentazione grafica è spesso semplice da interpretare ed è nota in tutto il mondo. L'editor KOP può essere utilizzato con i set di operazioni sia SIMATIC, che IEC È sempre possibile utilizzare l'editor AWL per visualizzare un programma creato con l'editor KOP. Editor FUP L'editor FUP di STEP 7-Micro/WIN 32 consente di visualizzare le operazioni in box logici simili ai comuni schemi a porte logiche. Non ci sono contatti e bobine come nell'editor KOP, ma operazioni equivalenti che vengono rappresentate come operazioni nei box. La logica del programma è derivata dalle connessioni tra le operazioni dei box. Ciò significa che l'uscita di un'operazione (ad es. di un box AND) può essere utilizzata per abilitare un'altra operazione (ad es. un temporizzatore) e creare la necessaria logica di controllo. Questo concetto di connessione consente di risolvere facilmente un'ampia gamma di problemi, proprio come con gli altri editor. La seguente figura illustra un esempio di un programma creato con l'editor FUP. 20
.")
21 Se un box ha un flusso di corrente in un ingresso EN e viene eseguito senza errori, l'uscita ENO passa il flusso di corrente all'elemento successivo. ENO può essere utilizzata come bit di attivazione che indica la corretta esecuzione di un'operazione. Il bit ENO viene utilizzato con l'inizio dello stack per influire sul flusso di corrente ed eseguire sequenze di operazioni successive. Avvertenza: È possibile utilizzare la funzione ENO con il software di programmazione STEP 7-Micro/WIN 32 versione 3.0 (o successiva) solo se si sta usando una CPU 221, CPU 222, CPU 224, CPU 226 o CPU 226XM. Le caratteristiche principali da considerare nella scelta dell'editor FUP sono le seguenti: Lo stile di rappresentazione mediante porte logiche è ideale per seguire il flusso del programma. L'editor FUP può essere utilizzato sia con il set di operazioni SIMATIC che con il set IEC È sempre possibile utilizzare l'editor AWL per visualizzare un programma creato con l'editor KOP. Grazie ai box AND/OR espandibili è facile disegnare combinazioni complesse di ingressi. Editor AWL L'editor AWL di STEP 7-Micro/WIN 32 consente di creare un programma di controllo specificando le abbreviazioni mnemoniche delle operazioni. In genere, l'editor AWL è adatto a programmatori esperti che hanno una buona conoscenza dei PLC e della programmazione. Questo editor consente inoltre di creare programmi che non potrebbero essere creati con gli editor KOP e FUP. Questo è possibile perché si programma nel linguaggio naturale della CPU, invece che con un editor grafico in cui occorre applicare alcune restrizioni per disegnare correttamente i diagrammi. La seguente figura illustra un esempio di un programma AWL. SEGMENTO 1 LD I0.0 LD I0.1 21
22 LD I2.0 A I2.1 OLD ALD = Q5.0 Come si può vedere nella figura, questo tipo di linguaggio testuale è molto simile alla programmazione in assembly. La CPU esegue ogni operazione nell'ordine indicato dal programma, dall'inizio alla fine, e quindi riparte dall'inizio. Il linguaggio AWL e il linguaggio assembly presentano anche altre analogie. Le CPU S7-200 utilizzano uno stack logico per risolvere la logica di controllo. Gli editor KOP e FUP inseriscono automaticamente le operazioni necessarie per gestire il funzionamento dello stack. In AWL, l'utente deve inserire tali operazioni per gestire lo stack autonomamente. La seguente figura mostra un semplice programma in KOP e il programma corrispondente in AWL. SEGMENTO 1 LD I0.0 LD I0.1 LD I2.0 A I2.1 OLD ALD = Q5.0 Di seguito si mostra ciò che accade nello stack: Operazioni 22
23 Le caratteristiche principali da considerare nella scelta dell'editor AWL sono le seguenti: AWL è più adatto ai programmatori esperti. AWL consente di risolvere problemi che non possono essere risolti facilmente con gli editor KOP e FUP. Con l'editor AWL si può utilizzare solamente il set di operazioni SIMATIC. Non esiste un set di operazioni IEC per AWL. Mentre è sempre possibile utilizzare l'editor AWL per visualizzare ed editare un programma creato con gli editor SIMATIC KOP o FUP, il contrario non è sempre vero. Non sempre è possibile utilizzare gli editor KOP o FUP SIMATIC per visualizzare un programma scritto con l'editor AWL. 23
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
NORMA CEI EN 61131. PLC: programmazione. PLC: programmazione. PLC: programmazione. Automazione Industriale 3. Automazione Industriale
 NORMA CEI EN 61131 Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 La normativa IEC 1131 del 1993 ha standardizzato 5
NORMA CEI EN 61131 Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 La normativa IEC 1131 del 1993 ha standardizzato 5
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P39 10. Serie P42 12. Serie P57 14. Serie P60 16. Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
PLC - Linguaggi. I linguaggi di programmazione dei PLC sono orientati ai problemi di automazione e utilizzano soprattutto:
 PLC - Linguaggi Il software è l elemento determinante per dare all hardware del PLC quella flessibilità che i sistemi di controllo a logica cablata non possiedono. Il software che le aziende producono
PLC - Linguaggi Il software è l elemento determinante per dare all hardware del PLC quella flessibilità che i sistemi di controllo a logica cablata non possiedono. Il software che le aziende producono
Motore passo passo: Laboratorio di Elettronica 1
 Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte;
 Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
Lezione 16. Motori elettrici: introduzione
 Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Regole della mano destra.
 Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
IL PLC 1/9. permanente, la memoria volatile e i pin di I/O, oltre ad eventuali altri blocchi specializzati.
 IL PLC 1/9 Storia Il motivo per il quale nacque il PLC fu la necessità di eliminare i costi elevati per rimpiazzare i sistemi complicatissimi basati su relè. Nel anni 70 la società Beadford Associates
IL PLC 1/9 Storia Il motivo per il quale nacque il PLC fu la necessità di eliminare i costi elevati per rimpiazzare i sistemi complicatissimi basati su relè. Nel anni 70 la società Beadford Associates
Architettura hardware
 Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Gli attuatori. Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo
 Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Esame di Stato 2015. Materia: SISTEMI AUTOMATICI PRIMA PARTE
 Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
P R O G E T T O L A R S A A P P U N T I S U L P. L. C.
 P R O G E T T O L A R S A A P P U N T I S U L P. L. C. L automazione di un qualunque procedimento industriale si ottiene mediante un insieme d apparecchiature, opportunamente collegate tra loro, in modo
P R O G E T T O L A R S A A P P U N T I S U L P. L. C. L automazione di un qualunque procedimento industriale si ottiene mediante un insieme d apparecchiature, opportunamente collegate tra loro, in modo
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
SOFTWARE - STEP-7 -AVVIAMENTO DI STEP 7 -Micro/Win (Win 95/98/NT)-
-") SOFTWARE - STEP-7 -AVVIAMENTO DI STEP 7 -Micro/Win (Win 95/98/NT)- Nella cartella SIMATIC, a cui si accede dal menù di AVVIO, è contenuta la cartella STEP 7- Micro/Win32.Questa contiene a sua volta l icona
SOFTWARE - STEP-7 -AVVIAMENTO DI STEP 7 -Micro/Win (Win 95/98/NT)- Nella cartella SIMATIC, a cui si accede dal menù di AVVIO, è contenuta la cartella STEP 7- Micro/Win32.Questa contiene a sua volta l icona
ITI M. FARADAY Programmazione modulare
 ITI M. FARADAY Programmazione modulare A.S. 2015/16 Indirizzo: ELETTROTECNICA ed ELETTRONICA Disciplina: ELETTROTECNICA ed ELETTRONICA Classe: V A elettrotecnica settimanali previste: 6 INSEGNANTI: ERBAGGIO
ITI M. FARADAY Programmazione modulare A.S. 2015/16 Indirizzo: ELETTROTECNICA ed ELETTRONICA Disciplina: ELETTROTECNICA ed ELETTRONICA Classe: V A elettrotecnica settimanali previste: 6 INSEGNANTI: ERBAGGIO
PLC Programmable Logic Controller
 PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
Fondamenti di macchine elettriche Corso SSIS 2006/07
 9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
Specializzazione Elettronica ed Elettrotecnica Articolazione Elettrotecnica. Elettronica ed Elettrotecnica - Classe 3^
 Specializzazione Elettronica ed Elettrotecnica Articolazione Elettrotecnica Elettronica ed Elettrotecnica - Classe 3^ 1- Reti elettriche in corrente continua Grandezze elettriche fondamentali e loro legami,
Specializzazione Elettronica ed Elettrotecnica Articolazione Elettrotecnica Elettronica ed Elettrotecnica - Classe 3^ 1- Reti elettriche in corrente continua Grandezze elettriche fondamentali e loro legami,
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
Le macchine elettriche
 Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como LOGICA DI CONTROLLO
 Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Corso PLC - Manuale Pratico 1
 Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
LABORATORIO DI SISTEMI
 ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA
 MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
Algebra Di Boole. Definiamo ora che esiste un segnale avente valore opposto di quello assunto dalla variabile X.
 Algebra Di Boole L algebra di Boole è un ramo della matematica basato sul calcolo logico a due valori di verità (vero, falso). Con alcune leggi particolari consente di operare su proposizioni allo stesso
Algebra Di Boole L algebra di Boole è un ramo della matematica basato sul calcolo logico a due valori di verità (vero, falso). Con alcune leggi particolari consente di operare su proposizioni allo stesso
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione
 PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
PLC Sistemi a Logica Programmabile Il linguaggi di programmazione Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi nicola.ingrosso
Appunti sulla Macchina di Turing. Macchina di Turing
 Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
I.T.I.S. M. FARADAY - Programmazione modulare
 I.T.I.S. M. FARADAY - Programmazione modulare A.S. 2015/2016 Indirizzo: ELETTROTECNICA Disciplina: ELETTROTECNICA E ELETTRONICA Classe: 5Aes Ore settimanali previste: 5 (2) INSEGNANTI: SCIARRA MAURIZIO
I.T.I.S. M. FARADAY - Programmazione modulare A.S. 2015/2016 Indirizzo: ELETTROTECNICA Disciplina: ELETTROTECNICA E ELETTRONICA Classe: 5Aes Ore settimanali previste: 5 (2) INSEGNANTI: SCIARRA MAURIZIO
1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti.
. Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti.") SOLUZIONE TEMA MINISTERIALE TECNICO DELLE INDUSTRIE ELETTRICHE ED ELETTRONICHE 2012 1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti. L impianto elettrico a
SOLUZIONE TEMA MINISTERIALE TECNICO DELLE INDUSTRIE ELETTRICHE ED ELETTRONICHE 2012 1). Descrizione dell impianto attraverso uno schema e specifica della funzione dei componenti. L impianto elettrico a
I motori elettrici più diffusi
 I motori elettrici più diffusi Corrente continua Trifase ad induzione Altri Motori: Monofase Rotore avvolto (Collettore) Sincroni AC Servomotori Passo Passo Motore in Corrente Continua Gli avvolgimenti
I motori elettrici più diffusi Corrente continua Trifase ad induzione Altri Motori: Monofase Rotore avvolto (Collettore) Sincroni AC Servomotori Passo Passo Motore in Corrente Continua Gli avvolgimenti
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
PROGRAMMAZIONE DIDATTICA ANNUALE. SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica
 ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
Motori brushless. Alimentando il motore e pilotando opportunamente le correnti I in modo che siano come nella figura 2 si nota come
 49 Motori brushless 1. Generalità I motori brushless sono idealmente derivati dai motori in DC con il proposito di eliminare il collettore a lamelle e quindi le spazzole. Esistono due tipi di motore brushless:
49 Motori brushless 1. Generalità I motori brushless sono idealmente derivati dai motori in DC con il proposito di eliminare il collettore a lamelle e quindi le spazzole. Esistono due tipi di motore brushless:
Elenco unità capitalizzabili non presenti nello standard nazionale
 Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
Controllo di un Motore Elettrico in Corrente Continua
 Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Struttura del calcolatore
 Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
C. P. U. MEMORIA CENTRALE
 C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
Excel. A cura di Luigi Labonia. e-mail: luigi.lab@libero.it
 Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte
 PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte Prima Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi
PLC Sistemi a Logica Programmabile Il linguaggio Ladder-Parte Prima Prof. Nicola Ingrosso Guida di riferimento all applicazione applicazione dei Microcontrollori Programmabili IPSIA G.Ferraris Brindisi
APPUNTI SUL CAMPO MAGNETICO ROTANTE
 APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
LA CORRENTE ELETTRICA CONTINUA
 LA CORRENTE ELETTRICA CONTINUA (Fenomeno, indipendente dal tempo, che si osserva nei corpi conduttori quando le cariche elettriche fluiscono in essi.) Un conduttore metallico è in equilibrio elettrostatico
LA CORRENTE ELETTRICA CONTINUA (Fenomeno, indipendente dal tempo, che si osserva nei corpi conduttori quando le cariche elettriche fluiscono in essi.) Un conduttore metallico è in equilibrio elettrostatico
MODELLO CLIENT/SERVER. Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it
 MODELLO CLIENT/SERVER Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it POSSIBILI STRUTTURE DEL SISTEMA INFORMATIVO La struttura di un sistema informativo
MODELLO CLIENT/SERVER Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it POSSIBILI STRUTTURE DEL SISTEMA INFORMATIVO La struttura di un sistema informativo
Manuale Amministratore Legalmail Enterprise. Manuale ad uso degli Amministratori del Servizio Legalmail Enterprise
 Manuale Amministratore Legalmail Enterprise Manuale ad uso degli Amministratori del Servizio Legalmail Enterprise Pagina 2 di 16 Manuale Amministratore Legalmail Enterprise Introduzione a Legalmail Enterprise...3
Manuale Amministratore Legalmail Enterprise Manuale ad uso degli Amministratori del Servizio Legalmail Enterprise Pagina 2 di 16 Manuale Amministratore Legalmail Enterprise Introduzione a Legalmail Enterprise...3
P od o u d z u io i n o e n e d e d l e l l a l a c o c r o ren e t n e e a l a t l er e na n t a a alternatori. gruppi elettrogeni
 Produzione della corrente alternata La generazione di corrente alternata viene ottenuta con macchine elettriche dette alternatori. Per piccole potenze si usano i gruppi elettrogeni. Nelle centrali elettriche
Produzione della corrente alternata La generazione di corrente alternata viene ottenuta con macchine elettriche dette alternatori. Per piccole potenze si usano i gruppi elettrogeni. Nelle centrali elettriche
METODO PER LA DESCRIZIONE DEL CAMPO MAGNETICO ROTANTE
 Ing. ENRICO BIAGI Docente di Tecnologie elettrice, Disegno, Progettazione ITIS A. Volta - Perugia ETODO PER LA DESCRIZIONE DEL CAPO AGNETICO ROTANTE Viene illustrato un metodo analitico-grafico per descrivere
Ing. ENRICO BIAGI Docente di Tecnologie elettrice, Disegno, Progettazione ITIS A. Volta - Perugia ETODO PER LA DESCRIZIONE DEL CAPO AGNETICO ROTANTE Viene illustrato un metodo analitico-grafico per descrivere
Architettura di un calcolatore
 2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
2009-2010 Ingegneria Aerospaziale Prof. A. Palomba - Elementi di Informatica (E-Z) 7 Architettura di un calcolatore Lez. 7 1 Modello di Von Neumann Il termine modello di Von Neumann (o macchina di Von
Registratori di Cassa
 modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
La caratteristica meccanica rappresenta l'andamento della coppia motrice C in
 MOTORI CORRENTE ALTERNATA: CARATTERISTICA MECCANICA La caratteristica meccanica rappresenta l'andamento della coppia motrice C in funzione della velocità di rotazione del rotore n r Alla partenza la C
MOTORI CORRENTE ALTERNATA: CARATTERISTICA MECCANICA La caratteristica meccanica rappresenta l'andamento della coppia motrice C in funzione della velocità di rotazione del rotore n r Alla partenza la C
6 Cenni sulla dinamica dei motori in corrente continua
 6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
IRSplit. Istruzioni d uso 07/10-01 PC
 3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
CLASSE III A I.T.I. (ABACUS) SISTEMI DI ELABORAZIONE E TRASMISSIONE DEI DATI VERIFICA DI RECUPERO
 SISTEMI DI ELABORAZIONE E TRASMISSIONE DEI DATI VERIFICA DI RECUPERO") CLASSE III A I.T.I. (ABACUS) SISTEMI DI ELABORAZIONE E TRASMISSIONE DEI DATI VERIFICA DI RECUPERO 1 Domanda [1 punto] Dato il formato in virgola mobile su 32 bit così definito (precisione singola): o 1
CLASSE III A I.T.I. (ABACUS) SISTEMI DI ELABORAZIONE E TRASMISSIONE DEI DATI VERIFICA DI RECUPERO 1 Domanda [1 punto] Dato il formato in virgola mobile su 32 bit così definito (precisione singola): o 1
Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici.
 GLI ATTUATORI Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici. La casistica è assai vasta ; sono comuni i semplici azionamenti magnetici (elettromagneti
GLI ATTUATORI Vengono detti attuatori i dispositivi in grado di agire sull ambiente esterno comandati da segnali elettrici. La casistica è assai vasta ; sono comuni i semplici azionamenti magnetici (elettromagneti
Gamma BRUSHLESS CROUZET
 Gamma BRUSHLESS CROUZET - Presentazione La ITE Industrialtecnoelettrica Srl di Bologna (tel.5.386.6) presenta la nuova gamma Crouzet di micromotori brushless di elevata qualità con coppie da 6 e 85 mnm
Gamma BRUSHLESS CROUZET - Presentazione La ITE Industrialtecnoelettrica Srl di Bologna (tel.5.386.6) presenta la nuova gamma Crouzet di micromotori brushless di elevata qualità con coppie da 6 e 85 mnm
Sistema di acquisizione dati
 Sistema di acquisizione dati Ci sono innumerevoli ragioni sul perché é necessario acquisire informazioni dal mondo esterno: 1. Il controllo dei processi fisici che interessano la produzione industriale
Sistema di acquisizione dati Ci sono innumerevoli ragioni sul perché é necessario acquisire informazioni dal mondo esterno: 1. Il controllo dei processi fisici che interessano la produzione industriale
All interno del computer si possono individuare 5 componenti principali: SCHEDA MADRE. MICROPROCESSORE che contiene la CPU MEMORIA RAM MEMORIA ROM
 Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Macchina sincrona (alternatore)
") Macchina sincrona (alternatore) Principio di funzionamento Le macchine sincrone si dividono in: macchina sincrona isotropa, se è realizzata la simmetria del flusso; macchina sincrona anisotropa, quanto
Macchina sincrona (alternatore) Principio di funzionamento Le macchine sincrone si dividono in: macchina sincrona isotropa, se è realizzata la simmetria del flusso; macchina sincrona anisotropa, quanto
BMSO1001. Virtual Configurator. Istruzioni d uso 02/10-01 PC
 BMSO1001 Virtual Configurator Istruzioni d uso 02/10-01 PC 2 Virtual Configurator Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Concetti
BMSO1001 Virtual Configurator Istruzioni d uso 02/10-01 PC 2 Virtual Configurator Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Concetti
Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte;
 Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte; Obiettivi generali. Macchine Elettriche, HOEPLI di Gaetano Conte; Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte;
Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte; Obiettivi generali. Macchine Elettriche, HOEPLI di Gaetano Conte; Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte;
ALGEBRA DELLE PROPOSIZIONI
 Università di Salerno Fondamenti di Informatica Corso di Laurea Ingegneria Corso B Docente: Ing. Giovanni Secondulfo Anno Accademico 2010-2011 ALGEBRA DELLE PROPOSIZIONI Fondamenti di Informatica Algebra
Università di Salerno Fondamenti di Informatica Corso di Laurea Ingegneria Corso B Docente: Ing. Giovanni Secondulfo Anno Accademico 2010-2011 ALGEBRA DELLE PROPOSIZIONI Fondamenti di Informatica Algebra
GUIDA ALLA PREPARAZIONE DELL ESAME
 GUIDA ALLA PREPARAZIONE DELL ESAME INTRODUZIONE Questa guida è rivolta a tutti gli studenti che intendono sostenere l esame del corso di Macchine e Azionamenti Elettrici in forma orale. I testi consigliati
GUIDA ALLA PREPARAZIONE DELL ESAME INTRODUZIONE Questa guida è rivolta a tutti gli studenti che intendono sostenere l esame del corso di Macchine e Azionamenti Elettrici in forma orale. I testi consigliati
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
Integrated Comfort SyStemS
 Integrated Comfort Systems EST (Energy Saving Technology) è una tecnologia applicata ai ventilconvettori e cassette EURAPO che consente di ottenere assorbimenti elettrici estremamente contenuti e una modulazione
Integrated Comfort Systems EST (Energy Saving Technology) è una tecnologia applicata ai ventilconvettori e cassette EURAPO che consente di ottenere assorbimenti elettrici estremamente contenuti e una modulazione
Progetto INCOME. Manuale Utente Operatore Installazione
 VERSIONI Manuale Utente Operatore Installazione Tosca-Mobile VERS. Motivo Modifiche Data Approvazione Approvatore 1.0 Prima emissione 02/12/11 1/21 Sommario SOMMARIO... 2 INTRODUZIONE... 3 1.1. CONTENUTI
VERSIONI Manuale Utente Operatore Installazione Tosca-Mobile VERS. Motivo Modifiche Data Approvazione Approvatore 1.0 Prima emissione 02/12/11 1/21 Sommario SOMMARIO... 2 INTRODUZIONE... 3 1.1. CONTENUTI
GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain.
 *+33(GLWRU GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain. Il programma si basa su un architettura di tasti funzionali presenti
*+33(GLWRU GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain. Il programma si basa su un architettura di tasti funzionali presenti
Autoware Ladder Tool (per Arduino ) Basic Tutorial
 Basic Tutorial") Per iniziare. Utilizzare il ns. pacchetto Autoware Ladder Tool (in breve Ladder Tool) per Arduino è veramente semplice. Elenchiamo qui di seguito i passi necessari per eseguire la ns. prima esercitazione.
Per iniziare. Utilizzare il ns. pacchetto Autoware Ladder Tool (in breve Ladder Tool) per Arduino è veramente semplice. Elenchiamo qui di seguito i passi necessari per eseguire la ns. prima esercitazione.
Siamo così arrivati all aritmetica modulare, ma anche a individuare alcuni aspetti di come funziona l aritmetica del calcolatore come vedremo.
 DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
PROVE SULLA MACCHINA A CORRENTE CONTINUA
 LABORATORIO DI MACCHINE ELETTRICHE PROVE SULLA MACCHINA A CORRENTE CONTINUA PROVE SULLA MACCHINA A C. C. Contenuti Le prove di laboratorio che verranno prese in esame riguardano: la misura a freddo, in
LABORATORIO DI MACCHINE ELETTRICHE PROVE SULLA MACCHINA A CORRENTE CONTINUA PROVE SULLA MACCHINA A C. C. Contenuti Le prove di laboratorio che verranno prese in esame riguardano: la misura a freddo, in
Esame di INFORMATICA
 Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Volume GESTFLORA. Gestione aziende agricole e floricole. Guidaall uso del software
 Volume GESTFLORA Gestione aziende agricole e floricole Guidaall uso del software GESTIONE AZIENDE AGRICOLE E FLORICOLE Guida all uso del software GestFlora Ver. 2.00 Inter-Ware Srl Viadegli Innocenti,
Volume GESTFLORA Gestione aziende agricole e floricole Guidaall uso del software GESTIONE AZIENDE AGRICOLE E FLORICOLE Guida all uso del software GestFlora Ver. 2.00 Inter-Ware Srl Viadegli Innocenti,
Generazione campo magnetico
 ELETTRO-MAGNETISMO Fra magnetismo ed elettricità esistono stretti rapporti: La corrente elettrica genera un campo magnetico; Un campo magnetico può generare elettricità. Generazione campo magnetico Corrente
ELETTRO-MAGNETISMO Fra magnetismo ed elettricità esistono stretti rapporti: La corrente elettrica genera un campo magnetico; Un campo magnetico può generare elettricità. Generazione campo magnetico Corrente
La tecnica proporzionale
 La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
metodi di conversione, tipi di conversioni e schemi Alimentatori lineari
 Elettronica per l informatica 1 Contenuto dell unità D Conversione dell energia metodi di conversione, tipi di conversioni e schemi Alimentatori lineari componentistica e tecnologie riferimenti di tensione,
Elettronica per l informatica 1 Contenuto dell unità D Conversione dell energia metodi di conversione, tipi di conversioni e schemi Alimentatori lineari componentistica e tecnologie riferimenti di tensione,
Architettura del calcolatore
 Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
MANUALE ESSE3 Gestione Registro delle lezioni
 MANUALE ESSE3 Gestione Registro delle lezioni DOCENTI 1 INDICE 1. INTRODUZIONE E ACCESSO... 3 2. GESTIONE DEL REGISTRO... 4 2.1. Informazioni generali... 6 2.2. Stato del Registro... 7 2.2.1. Transizioni
MANUALE ESSE3 Gestione Registro delle lezioni DOCENTI 1 INDICE 1. INTRODUZIONE E ACCESSO... 3 2. GESTIONE DEL REGISTRO... 4 2.1. Informazioni generali... 6 2.2. Stato del Registro... 7 2.2.1. Transizioni
Uso di base delle funzioni in Microsoft Excel
 Uso di base delle funzioni in Microsoft Excel Le funzioni Una funzione è un operatore che applicato a uno o più argomenti (valori, siano essi numeri con virgola, numeri interi, stringhe di caratteri) restituisce
Uso di base delle funzioni in Microsoft Excel Le funzioni Una funzione è un operatore che applicato a uno o più argomenti (valori, siano essi numeri con virgola, numeri interi, stringhe di caratteri) restituisce
CALCOLATORI ELETTRONICI A cura di Luca Orrù
 Lezione 1 Obiettivi del corso Il corso si propone di descrivere i principi generali delle architetture di calcolo (collegamento tra l hardware e il software). Sommario 1. Tecniche di descrizione (necessarie
Lezione 1 Obiettivi del corso Il corso si propone di descrivere i principi generali delle architetture di calcolo (collegamento tra l hardware e il software). Sommario 1. Tecniche di descrizione (necessarie
Ing. Paolo Domenici PREFAZIONE
 Ing. Paolo Domenici SISTEMI A MICROPROCESSORE PREFAZIONE Il corso ha lo scopo di fornire i concetti fondamentali dei sistemi a microprocessore in modo semplice e interattivo. È costituito da una parte
Ing. Paolo Domenici SISTEMI A MICROPROCESSORE PREFAZIONE Il corso ha lo scopo di fornire i concetti fondamentali dei sistemi a microprocessore in modo semplice e interattivo. È costituito da una parte
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
SECONDO BIENNIO ISTITUTO TECNICO
 SETTORE DOCUMENTI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE ELETTROTECNICA TECNOLOGICO ELETTRONICA ED ELETTROTECNICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento,
SETTORE DOCUMENTI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE ELETTROTECNICA TECNOLOGICO ELETTRONICA ED ELETTROTECNICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento,
SISTEMI DI NUMERAZIONE E CODICI
 SISTEMI DI NUMERAZIONE E CODICI Il Sistema di Numerazione Decimale Il sistema decimale o sistema di numerazione a base dieci usa dieci cifre, dette cifre decimali, da O a 9. Il sistema decimale è un sistema
SISTEMI DI NUMERAZIONE E CODICI Il Sistema di Numerazione Decimale Il sistema decimale o sistema di numerazione a base dieci usa dieci cifre, dette cifre decimali, da O a 9. Il sistema decimale è un sistema
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 La CPU e l esecuzione dei programmi 1 Nelle lezioni precedenti abbiamo detto che Un computer è costituito da 3 principali componenti:
per chimica industriale e chimica applicata e ambientale LEZIONE 4 La CPU e l esecuzione dei programmi 1 Nelle lezioni precedenti abbiamo detto che Un computer è costituito da 3 principali componenti:
IIS D ORIA - UFC. PROGRAMMAZIONE DI DIPARTIMENTO INDIRIZZO Elettrotecnica e Automazione (I.T.I.S.) MATERIA Elettrotecnica ANNO DI CORSO Quinto
 MATERIA Elettrotecnica ANNO DI CORSO Quinto") INDICE DELLE UFC N. DENOMINAZIONE 1 Generalità sulle macchine elettriche. 2 Macchine elettriche statiche. 3 Macchine elettriche asincrone. 4 Macchine elettriche sincrone. 5 Macchine elettriche in corrente
INDICE DELLE UFC N. DENOMINAZIONE 1 Generalità sulle macchine elettriche. 2 Macchine elettriche statiche. 3 Macchine elettriche asincrone. 4 Macchine elettriche sincrone. 5 Macchine elettriche in corrente
Generatore radiologico
 Generatore radiologico Radiazioni artificiali alimentazione: corrente elettrica www.med.unipg.it/ac/rad/ www.etsrm.it oscar fiorucci. laurea.tecn.radiol@ospedale.perugia.it Impianto radiologico trasformatore
Generatore radiologico Radiazioni artificiali alimentazione: corrente elettrica www.med.unipg.it/ac/rad/ www.etsrm.it oscar fiorucci. laurea.tecn.radiol@ospedale.perugia.it Impianto radiologico trasformatore
Informatica - A.A. 2010/11
 Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
Elettromobilità WITTENSTEIN La pole position degli azionamenti elettrici. efficiente compatto sicuro
 WITTENSTEIN La pole position degli azionamenti elettrici efficiente compatto sicuro 101 Azionamenti perfettamente integrati da un unico partner L elettromobilità va ben oltre il semplice funzionamento
WITTENSTEIN La pole position degli azionamenti elettrici efficiente compatto sicuro 101 Azionamenti perfettamente integrati da un unico partner L elettromobilità va ben oltre il semplice funzionamento
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198
 SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
Manuale di programmazione BerMar_Drive_Software
 Invert er LG Manuale di programmazione BerMar_Drive_Software Mot ori elet t ric i Informazioni preliminari... 2 Installazione... 3 Avvio del programma... 4 Funzionamento Off-Line... 7 Caricamento di una
Invert er LG Manuale di programmazione BerMar_Drive_Software Mot ori elet t ric i Informazioni preliminari... 2 Installazione... 3 Avvio del programma... 4 Funzionamento Off-Line... 7 Caricamento di una