APPRENDIMENTO MIMETICO Reinforcement Learning. (Apprendimento per rinforzo) (II parte)
|
|
|
- Berto Borrelli
- 8 anni fa
- Visualizzazioni
Transcript
1 APPRENDIMENTO MIMETICO Reinforcemen Lerning (Apprendimeno per rinforzo) (II pre)

2 ovvero
3 Co è il R.L. Il RL riponde ll domnd di come un gene uonomo che percepice e gice in un mbiene può imprre cegliere le zioni oime per rggiungere i uoi obieivi. Eempi: Robo che pprende rggiungere il cric-berie Imprre cegliere le zioni che oimizzno l produzione in un ziend Imprre giocre Bcgmmon

4 Co è il R.L. (2) Si noino lcune creriiche dei problemi: Ricompene rirde: l gene deve pprendere l funzione che mpp lo o nell zione oim (), m non ono noi eempi di rining nell form <, ()>, m piuoo ono diponibili delle ricompene in ui o pre degli i. Opporunià di un eplorzione iv: l gene influenz l diribuzione di eempi di rining in be ll equenz di zioni cele. Sorge un problem di un rdeoff r l cel fvore dell eplorzione (explorion, per curre nuov informzione) e quell dell uilizzzione (exploiion, per mimizzre le ricompene ccumule).

5 Co è il R.L. (3) Poibilià che gli i ino przilmene oervbili. Ad eempio un robo fornio di elecmer dvni può non vedere co c è diero: i deve ffidre lle conocenze cquiie o deve ure zioni per migliorre l oervbilià dell mbiene? Può eere necerio imprre compii () mulipli con gli ei enori/uori. Ad eempio, un robo deve poer imprre ricricri, percorrere un corridoio, mneggire un mpne ler: come ure le eperienze e le conocenze già cquiie per ridurre l compleià qundo impr un nuovo?

6 Co è il R.L. (4) Un eempio: TD-Gmmon (Teuro, 1995): Apprende giocre Bcgmmon Ricompene immedie: 100 e vince -100 e perde 0 per ui gli lri i Addero giocndo 1.5 milioni di prie conro e eo. Aulmene gioc come un buon giocore umno

7 Co è un gene (in generle) Con gene i indic un progrmm progeo lmeno in pre u un modello umno o di un lro orgnimo nimle.

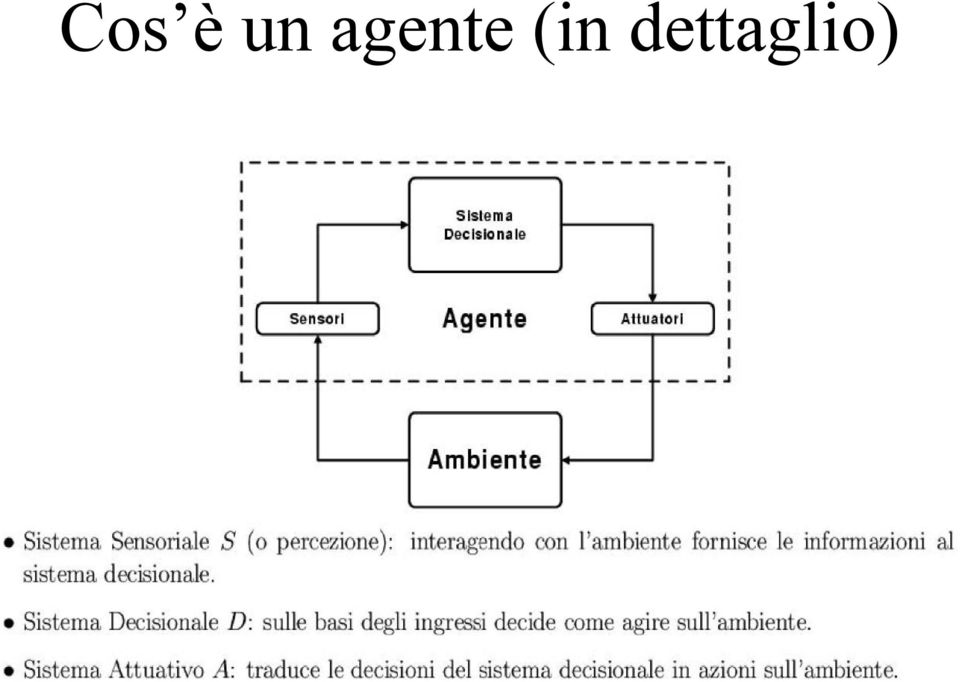
8 Co è un gene (in deglio)
9 Quli ipologie di geni Ageni SR o imolo-ripo: () f(()) Ageni SXR o imolo-o-ripo, in cui eie uno o x() e il compormeno dell gene può eere modello come: () f(x(), ()) x(1) g(x(), ()) Ageni Deliberivi: bno le loro deciioni u modelli complei dell mbiene e ul loro inpu enorile.

10 Apprendimeno per rinforzo L gene riceve delle enzioni dll mbiene rvero i uoi enori; In be lle ue enzioni, l gene decide che zioni effeure nell mbiene; In be l riulo immedio delle ue zioni l gene può eere premio.

11 Creriiche dello o Policy di un gene: (, ). Creriiche dello o, : Coniene gli imoli pre-elbori prire dgli imoli emplici miuri ull mbiene. Gli imoli pre-elbori nlizzno un equenz emporle di imoli emplici. Lo o deve poer eere miuro dll gene. Come rppreeno? Memorizzo l equenz emporle degli imoli emplici di ineree?

12 Rewrd e Obbieivi Il rewrd è eerno ll gene Mimizzre l ricompen lungo ermine, Vlue, cumulndo le ricompene innee: r (()) R. Definendo un ricompen che viene mimizz olmene qundo il gol viene rggiuno, poimo oenere che l geni impri il (rggiung il gol). Collegmeno r rewrd e gol. Il rewrd conene di comunicre COSA i vuole oenere, null è deo ul COME.
. Collegmeno r rewrd e gol.")
13 Vlue funcion Co i inende per ricompen lungo ermine? Que è rppreen dll Vlue funcion; co rppreen? Al empo, d un cer policy (, ), l ricompen rà un funzione dei rewrd negli ini di empo ucceivi, d eempio: R r 1 r 2 r 3 r T Terminl e Qundo è degu? Problemi d orizzone finio (epiodic, erminl e i defined). Problemi zionri.

14 Infinie horizon problem (coninuing ) Il conceo fondmenle è il dicoun. Dicouned rewrd o dicouned reurn: R r 1 γr 2 γ 2 r 3 i 0 Dove 0 γ 1 è il dicoun re Preen vlue of fuure rewrd. γ r ( 1) r R if r r 1 γ Relzione con il co non-zionrio nel eing non-ociivo?

15 Come decrivere l mbiene Se i vuole uilizzre un meodo di pprendimeno uomico biogn dre un decrizione formle dell mbiene. Non inere pere emene com è fo l mbiene, inere piuoo fre delle ipoei generli ulle proprieà che l mbiene h. Nell Apprendimeno per Rinforzo i ume di olio che l mbiene po eere decrio d un Proceo di Deciione Mrovino (Mrov Deciion Proce o MDP).

16 Come decrivere l mbiene (2) Un Proceo di Deciione Mrovino è formlmene definio d: un inieme finio di i S; un inieme finio di zioni A; un funzione di rnizione T (T: S x A Π(S)) che egn d ogni coppi o-zione un diribuzione di probbilià u S; un funzione di rinforzo (o rewrd) R (R: S x A x S R) che egn un vlore numerico d ogni poibile rnizione.
 R (R: S x A x S R) che egn un vlore numerico d ogni poibile")
17 Inerzione gene-mbiene All ine l gene percepice l mbiene come S Sull be di decide di gire con A L mbiene riponde dndo ll gene un ricompen immedi (rewrd) r 1 r(, ) e producendo lo o ucceivo 1 δ(, ). Le funzioni δ e r ono pre dell mbiene e non ono necerimene noe ll gene (e poono eere non-deerminiiche).

18 L unzione dell ipoei Mrovin Ripeo ll pprendimeno per rinforzo i dice che un mbiene (un problem) oddif l ipoei Mrovin (Mrov Propery) qundo: P[ 1, r 1 r, ] P[ 1, r 1 r,, r, r 1, 0, 0 ] Quli ono le impliczioni dell ipoei Mrovin? Quello che uccede ll ine 1, ( 1, r 1 ) dipende olo d quello che è ucceo ll ine precedene (, r )! Non d uo ciò che è ucceo in precedenz (,, r, r 1, 0, 0 )
![] Quli ono le impliczioni dell ipoei Mrovin?](/docs-images/46/9868824/images/page_18.jpg "Quello che uccede ll ine 1, ( 1, r 1 ) dipende olo d quello che è ucceo ll ine precedene (, r")
19 L unzione dell ipoei Mrovin (2) Se un problem oddif l ipoei Mrovin h un dinmic che può eere decri con un dinmic d un po. Rifleioni: un pri Poer è Mrovin? Cmminre r l foll che ece d un cinem e cercre di evire gli uri, che ipo di problem è? Se non vle l ipoei Mrovin i dice che l mbiene è non-mrov. Qul è l cle dei problemi non-mrov?

20 Eempio 1: Il pendolo invero (1) L obbieivo è di pplicre delle forze l crrello che i muove u un binrio in modo d enere in piedi l incernier l crrello. Si h un fllimeno e l ngolo dell ripeo ll vericle uper un ogli oppure e il crrello rggiunge un eremo del binrio. L è ripoizion in vericle dopo ogni fllimeno.

21 Eempio 1: Il pendolo invero (2) Queo può eere ro come epiodico, dove gli epiodi ono i ripeui enivi di bilncire l. L ricompen in queo co porebbe eere 1 per ogni po (ep) in cui non vviene un fllimeno, coì che il vlore reiuio d ogni empo (reurn) rebbe il numero di ep fino l fllimeno. Alernivmene i porebbe rre il bilncimeno dell come un coninuo, undo lo cono (dicouning). In queo co l ricompen porebbe eere -1 d ogni fllimeno e zero in ui gli lri empi. Il reurn cicun empo rebbe relivo -γ, dove èil numero di pi prim di un fllimeno. In enrmbi i ci, il reurn è mimizzo per enere l bilnci più lungo poibile.
22 Il pendolo invero come proceo Mrovino Per vere un proceo Mrovino biognerebbe conocere emene l poizione e l velocià del crrello, l ngolo r crrello ed, l velocià ngolre dell. In un iem crrello- idelizzo, quee informzioni dovrebbero eere ufficieni per predire emene il compormeno fuuro del crrello e dell, de le zioni pree dl conroller. In pric, uvi, non è poibile conocere emene quee informzioni per le diorioni e i rirdi inrodoi di enori di miur. Nei ci reli occorre ener cono di lri fori, quli gli rii, le inerzie, ecc. Tuvi i può ccere nche in queo co l pproimzione di proceo Mrovino, nche e i dicreizno le vribili (per l poizione del crrello i umono re vlori, inir, der e mezzo, e imilmene i procede per le lre re vribili di o). I meodi di reinforcemen lerning permeono di ignorre in mole iuzioni i degli più fini.
23 Il pendolo invero
24 Eempio 2: Recycling Robo Un robo mobile h il compio di rccogliere le line vuoe in un mbiene. Dipone di un enore per rilevre le line vuoe e di un brccio con pinz per rccoglierle. È fornio di un beri ricricbile. L gene che govern il robo deve decidere qundo il robo deve 1) cercre ivmene le line per un cero periodo di empo; 2) rere fermo e pere che qulcuno bui denro il uo coneniore delle line vuoe 3) ndre ricricre le proprie berie (in queo co non c è rccol). L gene dipone quindi di re zioni, è il uo o coincide con lo o dell beri. I rewrd ono: 1) zero per il più del empo; 2) poiivo qundo rccoglie line vuoe (coincide con il loro numero) 3) foremene negivo e l beri i cric complemene.
25 Recycling Robo Aibo
26 Recycling Robo MDP (1) Con lcune emplificzioni, il robo rccogliore può eere modello come Mrov deciion proce, ovvero MDP. So: S {high, low} Azioni: A {wi, erch, rechrge} Policy: A(high) {wi, erch} A(low) {wi, erch, rechrge} Gol: collezionre il mggior numero di line.
27 Recycling Robo MDP (2) Funzione o proimo: P Pr{ 1, } Se il livello di energi è high ( high): e celgo Wi, 1 high. e celgo Serch, 1 vrà un cer probbilià di divenre low. P high low Serch Pr{ 1 low high, Serch} α Se il livello di energi è low ( low): e celgo Wi, 1 low. e celgo Rechrge, 1 high. e celgo Serch, 1 vrà un cer probbilià di fermri. P low low Serch Pr{ 1 low low, Serch} β
28 Recycling Robo MDP (3) Funzione Rewrd: R E{r 1 r,, 1 } R erch rewrd e il robo cercndo. R wi rewrd e il robo fermo. -3 e occorre porrlo ricricri 0 e il robo v uonommene ricricri NB: R erch > R wi Il compormeno dinmico del robo rccogliore può eere rppreeno dl eguene rniion grph:
29 Se rniion grph del Recycling Robo In modo più nliico, i poono bellre le probbilià di rnizione e i rewrd ei come nell figur che egue:
30 Form bellre
31 Policy r L policy deve eere ncor deermin. Come f l gene deerminre l policy oim? Archi mulipli fuoriuceni d un zione ono ocii ll probbilià di cegliere quel cmmino (mbiene ocico). Archi mulipli fuoriuceni d uno o, ono ocii ll policy.
32 Vlue funcion Qui ui gli lgorimi di RL ono bi ull im delle vlue funcion: funzioni di i (o di coppie o-zione) che imno quno buono èper l gene eere in un do o (o quno buono è ure un d zione in un do o). L nozione di quno buono è qui defini in ermini di fuure ricompene che poono eere ee, più precimene in ermini di reurn ei. Le vlue funcion ono definie ripeo d un policy. Si rmmeni che un policy è un mpping d cicun o, S, e zione, A(), ll probbilià (, ) di prendere l zione nello o. Informlmene, l vlue dello o oo l policy, V (), è il reurn eo qundo i pre d e d lì i egue.
33 Vlue funcion (2) Formlmene, i definice l e-vlue funcion per l policy come V () E {R } E γ r 1 0 Si noi che l vlue di uno o erminle, e eie, è empre zero. Similmene i definice l cion-vlue funcion per l policy come Q (, ) E {R, } E γ r, 0 1
34 Vlue funcion (3) Le vlue funcion V e Q i imno dll eperienz. Se d eempio l gene egue l policy e mniene un medi, per cicun o inconro, degli effeivi reurn che ono eguii d quello o, llor l medi convergerà ll vlue degli i, V (), e il numero di vole che lo o è inconro ende d infinio. Anlogmene e vengono enue le medie epre per cicun zione pre in uno o, llor quelle medie convergernno lle e-cion vlue, Q (, ). I meodi di im di queo ipo ono dei meodi Mone Crlo, poiché involvono medie u cmpioni rndom degli effeivi reurn. Verrnno illuri in eguio.
35 Promemori: eorem di Bye P(A, B ) P(A B) P(B) Nel noro co: P(r,, ) P(r ) P( ) P() de le effeive dipendenze (ggiornmeno byeino).
36 Clcolo ricorivo dell Vlue funcion V () E {R } V ( ) E {R 1 1 } Relzione? r E 0 1 γ γ γ γ r r E ) ( V r r E ) ( V ermine 2 ermine
37 E V (): primo ermine { } [ ] r 1 ( j, ) P ' R ' j ' j j Per ogni o devo vlure: Più zioni Più i proimi Rewrd ocici r R Viione Byein: Probbilià di oenere il rewrd ' j condizion ll rrivre nello o, che u vol è condizion llo cegliere l zione j.
38 V (): econdo ermine r Per ogni o devo vlure: Più zioni Più i proimi Rewrd ocici γ γ r E... ) ( V 0 2 γ ' r E ) ' ( V ricordndo che: Nell vluzione dello o ono occorre coniderre, con un peo opporuno e coni di γ, i rewrd lungo ermine che collezionerò prire di diveri i.
39 V (): econdo ermine (2) r In confluirnno i rewrd lungo ermine di ui gli i proimi, cicuno peo con l probbilià di pre d, ovvero, in ermini Byeini, condizioni ll relizzzione dell rnizione di o γ γ r E... ) ( V 0 2 γ ' r E ) ' ( V ) ' Pr( ' r E r E γ γ γ γ
40 V (): econdo ermine (3) r [ ] ) ' ( V P, ) ( r E ' ' j j j γ γ γ 0 2 ) ' Pr( ' r E r E γ γ γ γ
41 Clcolo ricorivo dell Vlue funcion Meendo inieme i due riuli: [ ] { } ' ' ' 0 2 ' ' ' ') ( ), ( ) ( ), ( ) ( j j V R P V r E R P V j j j j j j γ γ γ Policy Nex-e Que ulim è l Bellmn equion
42 Oervzioni [ ] { } ' ' ' ) ' ( ), ( ) ( j V R P V j j j γ r V () funz(v ( )) Bcwrd in ime
43 Oervzioni (2) en wih V () probbiliy (,) Q (,), Q (,) r 1 r 2 r 3 V ( ) 1 2 3
44 Eempio di clcolo dell funzione vlore α 0.4, β 0.1, γ 0.8,R erch 3,R wi 1 Vh Pr(W)x1x[10.8Vh] Pr(S)x0.4x[30.8Vh] Pr(S)x0.6x[30.8Vl] Wi Serch high Serch low Vl Pr(W)x1x[10.8Vl] Pr(S)x0.1x[30.8Vl] Pr(S)x0.9x[-30.8Vh] Wi Serch high Serch low Pr(R)x1x[00.8Vh] Rechrge Siem di 2 equzioni nelle 2 incognie Vh e Vl. Come clcolrle?
45 Eempio di clcolo dell funzione vlore (2) Vh Pr(W)x1x[10.8Vh] Pr(S)x0.4x[30.8Vh] Pr(S)x0.6x[30.8Vl] Wi Serch high Serch low Vl Pr(W)x1x[10.8Vl] Pr(S)x0.1x[30.8Vl] Pr(S)x0.9x[-30.8Vh] Wi Serch high Serch low Pr(R)x1x[00.8Vh] Rechrge Devo pecificre un policy (ocic): high [Pr(W) 0.4 Pr(S) 0.6] low [Pr(w) 0.4 Pr(S) 0.5 Pr(R) 0.1] Vh 0.4x1x[10.8Vh] 0.6x0.4x[30.8Vh] 0.6x0.6x[30.8Vl] Vl 0.4x1x[10.8Vl] 0.5x0.1x[30.8Vl] 0.5x0.9x[-30.8Vh] 0.1x1x[00.8Vh]
46 Eempio di clcolo dell funzione vlore (3) Devo pecificre un policy (ocic): high [Pr(W) 0.4 Pr(S) 0.6] low [Pr(w) 0.4 Pr(S) 0.5 Pr(R) 0.1] Vh 0.4x1x[10.8Vh] 0.6x0.4x[30.8Vh] 0.6x0.6x[30.8Vl] Vl 0.4x1x[10.8Vl] 0.5x0.1x[30.8Vl] 0.5x0.9x[-30.8Vh] 0.1x1x[00.8Vh] Vh Vl Vh Vl Vh Vl 3.12 Che vluzione i può dre del riulo? In oluo, neun.
47 Eempio di clcolo dell funzione vlore (4) Cmbio l policy (ocic), robo più ivo: high [Pr(W) 0.2 Pr(S) 0.8] low [Pr(w) 0.2 Pr(S) 0.7 Pr(R) 0.1] Vh 0.2x1x[10.8Vh] 0.8x0.4x[30.8Vh] 0.8x0.6x[30.8Vl] Vl 0.2x1x[10.8Vl] 0.7x0.1x[30.8Vl] 0.7x0.9x[-30.8Vh] 0.1x1x[00.8Vh] Vh Vl Vh Vl Vh Vl 2.80 È un policy peggiore. Come individure V oimle (e quindi l policy oimle)?
48 Opiml Vlue funcion Riolvere un di RL ignific, groolnmene, rovre un policy che perme di ccumulre un cco di ricompene lungo ermine. Per un MDP finio, i può procedere coì. Le vlue funcion definicono un ordinmeno przile ulle policie. Un policy è defini eere migliore o ugule un policy e il uo reurn eo è mggiore o ugule quello di per ui gli i. In lri ermini: e e olo e V () V () Vi è empre un policy che è migliore o ugule ue le lre policie: è l poliic oim (opiml policy), * (porebbe eercene più di un).
49 Opiml Vlue funcion (2) Tue le poliiche oime condividono l e e-vlue funcion, de opiml e-vlue funcion, defini come: V *( ) mxv ( ),( S) Le poliiche oime condividono l e opiml cion-e funcion, deno come Q* e defini come: Q * (, ) mx Q (, ),( S, A( )) Per l coppi o-zione (, ), que funzione dà il reurn eo per l zione cel nello o e perno eguendo un poliic oim. Perno i può crivere Q* in ermini di V* coì: Q (, ) E{ r V * ( ), }. * 1 γ 1
50 Opiml Vlue funcion e equzione di Bellmn Poiché V* è l vlue funcion per un policy, deve oddifre lle condizioni di uo-conienz de dll equzione di Bellmn per gli e vlue. L equzione di Bellmn cri per V* diven l Bellmn opimliy equion. Inuiivmene, e eprime il fo che il vlore di uno o oo un policy oim deve eguglire il reurn eo per l migliore zione in quello o: V *( ) mx A( ) Q * (, )
51 Opiml Vlue funcion e equzione di Bellmn (2) { } { } [ ] ' ' ' 1 1 * * 0 1 * * * ) ( ') * ( mx, ) * ( mx, mx, mx, mx ), ( mx ) * ( A V R P V r E r r E r E R E Q V γ γ γ γ γ
52 Opiml Vlue funcion e equzione di Bellmn (3) Anlogmene, l Bellmn opimliy equion per Q* è: Q * (, ) P ' ' { } E r 1 γ mx Q *( 1, '), [ ' ] R γ mx Q *( ', ') ' '
53 Soluzione dell equzione di oimlià Per MDP finii, l equzione di oimlià di Bellmn V * ( ) mx P ' [ R γv * ( ' ] ' ) ' h un unic oluzione indipendene dll poliic. Infi l B.o.e. por d un iem di equzioni, un per cicun o, coì che e ci ono N i, vi ono N equzioni in N incognie. Se le dinmiche del iem ono noe (R ', P ' ), in line di mim i può riolvere queo iem di equzioni per V* undo un qulii meodo per l rioluzione di iemi di equzioni nonlineri. Anlog coniderzione vle per Q*.
54 Coniderzioni ull V* Un vol che i dipone di V*, è fcile deerminre l poliic oim: per cicun o, c è un zione (o più di un) che fornice il mimo nell equzione di oimlià di Bellmnn. Si iene quell (o quelle) e i pongono zero l probbilià oci lle lre zioni. Un policy che egn probbilià non null olo quelle zioni è un policy oim (ricerc d un po). Un lro modo di dire l e co è che ogni policy che è greedy ripeo ll funzione vlore oim V* è un policy oim (greedy ricerc locle). Il bello dell V* è che i eegue un ricerc locle m inieme i iene cono dei riuli lungo ermine. Avendo Q* l ricerc dell zione oim è ncor più fcile: per ogni o i è già memorizz l zione che mimizz Q*(,).
55 Eempio: he Recycling Robo V * ( ) mx P ' [ R γv * ( ' ] ' ) ' Vi ono olo due i: l equzione di oimlià di Bellmn conie in due equzioni:
56 Eempio: he Recycling Robo (2) L equzione per V*(h) può eere cri come:
57 Eempio: he Recycling Robo (3) Anlogmene per V*(l) l equzione è: Per ogni cel di R, R w, α, β e γ, con 0 γ 1, 0 α, β 1, vi è emene un coppi di numeri, V*(h) e V*(l) che imulnemene oddifno quee due equzioni nonlineri.
58 Alro eempio: he Gridworld L gene può muoveri nelle 4 direzioni, m e l direzione lo por fuori dll grigli, re nell e poizione. Per ue le poizioni ecceo A e B l ricompen è 0, ecceo qundo be conro il conorno, in qul co è -1. Nello o A ue le zioni porno l gene nell poizione A e l ricompen è 10, nello o B lo porno in B e l ricompen è 5.
59 Alro eempio: he Gridworld (2) L funzione vlore e l poliic oim, clcole con l equzione di Bellmn, ono:
60 Coniderzioni finli u Bellmn L uo direo dell equzione di oimlià di Bellmn è poco prico. Richiede: 1) di conocere ccurmene l dinmic dell mbiene; 2) di vere bbnz riore di clcolo; 3) che i ripe l proprieà di Mrov. Ad eempio il gioco del Bcgmmon h i: occorrerebbero milioni di nni nche con le poenze di clcolo ule per riolvere le equzioni di Bellmn. Occorre opre per meodi che imno l V* (o l Q*). Per rrivre quei, occorre pre per l progrmmzione dinmic (Dynmic Progrmming, DP). Gli lgorimi clici di DP ono di limi uilià nel RL (umono un modello perfeo e ono compuzionlmene oneroi), m ono imporni dl puno di vi eorico. Gli lgorimi uilizzi in pric nel RL ono enivi di rggiungere lo eo effeo dell DP, m con meno compuzione e enz umere un modello perfeo dell mbiene. L DP può eere u per clcolre l funzione vlore, e i è vio che i poono fcilmene oenere poliiche oime un vol noe le vlue funcion oime, V* e Q*, che oddifino ll equzione di oimlià di Bellmn.
Sistemi Intelligenti Reinforcement Learning: Equazioni di Bellman
 Siemi Inelligeni Reinforcemen Lerning: quzioni di Bellmn Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Siemi Inelligeni Reinforcemen Lerning: quzioni di Bellmn Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Sistemi Intelligenti Reinforcement Learning: Iterative policy evaluation. Sommario
 Siemi Inelligeni Reinforcemen Lerning: Ierive policy evluion Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Siemi Inelligeni Reinforcemen Lerning: Ierive policy evluion Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Sistemi Intelligenti Reinforcement Learning: Sommario
 Siemi Inelligeni Reinforcemen Lerning: quzioni di Bellmn Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Siemi Inelligeni Reinforcemen Lerning: quzioni di Bellmn Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Sistemi Intelligenti Reinforcement Learning: Iterative policy evaluation
 Siemi Inelligeni Reinforcemen Lerning: Ierive policy evluion Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb Diprimeno di Informic borghee@di.unimi.i /28 Sommrio
Siemi Inelligeni Reinforcemen Lerning: Ierive policy evluion Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb Diprimeno di Informic borghee@di.unimi.i /28 Sommrio
Sistemi Intelligenti Reinforcement Learning: Sommario
 Siemi Inelligeni Reinforcemen Lerning: quzioni di Bellmn Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Siemi Inelligeni Reinforcemen Lerning: quzioni di Bellmn Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Sistemi Intelligenti Reinforcement Learning: Policy Iteration. Sommario
 Siemi Inelligeni Reinforcemen Lerning: Policy Ierion Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i /4
Siemi Inelligeni Reinforcemen Lerning: Policy Ierion Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i /4
LS-DYNA3D ABAQUS-explicit PAMCRASH RADIOSS. Vediamo come si sviluppa la soluzione esplicita del problema
 Anlisi rnsiori L'nlisi dinmic rnsiori (de nche nlisi emporle) è un ecnic che consene di deerminre l rispos dinmic di un sruur sogge d un generic eccizione emporle Gli eei emporli sono li d rendere imporni
Anlisi rnsiori L'nlisi dinmic rnsiori (de nche nlisi emporle) è un ecnic che consene di deerminre l rispos dinmic di un sruur sogge d un generic eccizione emporle Gli eei emporli sono li d rendere imporni
Tema 3. Insiemi, elementi di logica, calcolo combinatorio, relazioni e funzioni
 Tema 3 Iniemi, elemeni di logica, calcolo combinaorio, relazioni e funzioni 3.1 Queii di livello bae 3.1.1 Si coniderino i egueni enunciai: n è un muliplo di 3 o è un numero pari, e inolre è minore di
Tema 3 Iniemi, elemeni di logica, calcolo combinaorio, relazioni e funzioni 3.1 Queii di livello bae 3.1.1 Si coniderino i egueni enunciai: n è un muliplo di 3 o è un numero pari, e inolre è minore di
Regime dell interesse composto.
 Regime dell ineresse composo Formule d usre : M = monne ; I = ineresse ; C = cpile ; r = fore di cpilizzzione K = somm d sconre ; s = sso di scono unirio ; i = sso di ineresse unirio V = vlore ule ; ν
Regime dell ineresse composo Formule d usre : M = monne ; I = ineresse ; C = cpile ; r = fore di cpilizzzione K = somm d sconre ; s = sso di scono unirio ; i = sso di ineresse unirio V = vlore ule ; ν
Lezione 4. Risposte canoniche dei sistemi del primo e del secondo ordine
 Lezione 4 Ripoe canoniche dei iemi del primo e del econdo ordine Parameri caraeriici della ripoa allo calino Per ripoe canoniche i inendono le ripoe dei iemi dinamici ai egnali coiddei canonici (impulo,
Lezione 4 Ripoe canoniche dei iemi del primo e del econdo ordine Parameri caraeriici della ripoa allo calino Per ripoe canoniche i inendono le ripoe dei iemi dinamici ai egnali coiddei canonici (impulo,
Sistemi Intelligenti Reinforcement Learning: Policy iteration
 Sisemi Inelligeni Reinforcemen Lerning: Policy ierion Albero Borghese Universià degli Sudi di Milno Lbororio di Sisemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghese@dsi.unimi.i
Sisemi Inelligeni Reinforcemen Lerning: Policy ierion Albero Borghese Universià degli Sudi di Milno Lbororio di Sisemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghese@dsi.unimi.i
MOTI. Per descrivere un moto è necessario specificare la posizione del corpo in ogni istante. E quindi necessario definire un sistema di coordinate:
 MOTI Meccnic: Cinemic: Dinmic: brnc dell fiic che udi il moo dei corpi e le fore che lo fnno rire decrie il moo dei corpi en fre riferimeno eplicio lle fore che gicono u di ei è lo udio dell relione eplici
MOTI Meccnic: Cinemic: Dinmic: brnc dell fiic che udi il moo dei corpi e le fore che lo fnno rire decrie il moo dei corpi en fre riferimeno eplicio lle fore che gicono u di ei è lo udio dell relione eplici
INTEGRALI IMPROPRI. TEORIA in sintesi. , sappiamo che sotto tali condizioni esiste. Sia f ( x) l integrale definito fra a e b della funzione f ( x)
 l integrale definito fra a e b della funzione f ( x)") INTEGRALI IMPROPRI Prerequiii: Oieivi : Clcolo degli inegrli indefinii Inegrle definio di un funzione coninu Teorem e formul fondmenle del clcolo inegrle Appliczioni del clcolo inegrle Sper riconocere
INTEGRALI IMPROPRI Prerequiii: Oieivi : Clcolo degli inegrli indefinii Inegrle definio di un funzione coninu Teorem e formul fondmenle del clcolo inegrle Appliczioni del clcolo inegrle Sper riconocere
Problema 1: Una collisione tra meteoriti
 Problema : Una colliione ra meeorii Problemi di imulazione della econda prova di maemaica Eami di ao liceo cienifico 5 febbraio 05 Lo udene deve volgere un olo problema a ua cela Tempo maimo aegnao alla
Problema : Una colliione ra meeorii Problemi di imulazione della econda prova di maemaica Eami di ao liceo cienifico 5 febbraio 05 Lo udene deve volgere un olo problema a ua cela Tempo maimo aegnao alla
Metodo della Trasformata di Laplace (mtl)
") Lezione 7 Meodo della raformaa di Laplace Lezione n.7 Meodo della raformaa di Laplace (ml). Inroduzione. Richiami ulla raformaa di Laplace. Proprieà della raformaa. Regola di derivazione.3 abella di raformae
Lezione 7 Meodo della raformaa di Laplace Lezione n.7 Meodo della raformaa di Laplace (ml). Inroduzione. Richiami ulla raformaa di Laplace. Proprieà della raformaa. Regola di derivazione.3 abella di raformae
Sistemi Intelligenti Reinforcement Learning: Temporal Difference
 Siemi Inelligeni einforcemen Lerning: Temporl Difference Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
Siemi Inelligeni einforcemen Lerning: Temporl Difference Albero Borghee Univerià degli Sudi di Milno Lbororio di Siemi Inelligeni Applici (AIS-Lb) Diprimeno di Scienze dell Informzione borghee@di.unimi.i
REGISTRAZIONE DEL MOTO. Lo scopo è riempire una tabella t/s (istante di tempo/posizione occupata)
") REGISTRAZIONE DEL MOTO Lo copo è riempire una abella / (iane di empo/poizione occupaa) (ec) (meri) Ciò i può fare in due modi: 1) Prefiare le poizioni e miurare a quale empo vengano raggiune. Si compila
REGISTRAZIONE DEL MOTO Lo copo è riempire una abella / (iane di empo/poizione occupaa) (ec) (meri) Ciò i può fare in due modi: 1) Prefiare le poizioni e miurare a quale empo vengano raggiune. Si compila
Scelto l asse del moto y orientato verso l alto, nella prima fase del lancio si ha: v = a t ; y = ½ a t 2 e dopo t = 1 min = 60 s
 Eercizione n 3 FISICA SPERIMENTALE (C.L. Ing. Edi.) (Prof. Gbriele F)A.A. 1/11 Cinemic (b) 1. Un rzzo eore, lncio in ericle, le per 1 min con ccelerzione cone = m/, dopodiché, conumo uo il combuibile,
Eercizione n 3 FISICA SPERIMENTALE (C.L. Ing. Edi.) (Prof. Gbriele F)A.A. 1/11 Cinemic (b) 1. Un rzzo eore, lncio in ericle, le per 1 min con ccelerzione cone = m/, dopodiché, conumo uo il combuibile,
2. Politiche di gestione delle scorte
 deerminisica variabile nel empo Quando la domanda viaria nel empo, il problema della gesione dell invenario divena preamene dinamico. e viene deo di lo-sizing. Consideriamo il caso in cui la domanda pur
deerminisica variabile nel empo Quando la domanda viaria nel empo, il problema della gesione dell invenario divena preamene dinamico. e viene deo di lo-sizing. Consideriamo il caso in cui la domanda pur
Analisi nei domini del tempo e della frequenza
 Elaborazione digiale dei egnali di miura - 1 Analii nei domini del empo e della requenza Ogni egnale reale può eere prodoo aggiungendo onde inuoidali a) Coordinae ridimenionali: empo, requenza ed ampiezza.
Elaborazione digiale dei egnali di miura - 1 Analii nei domini del empo e della requenza Ogni egnale reale può eere prodoo aggiungendo onde inuoidali a) Coordinae ridimenionali: empo, requenza ed ampiezza.
Metodo della trasformata di Laplace
 Meodo della raformaa di aplace Il meodo imbolico conene di affronare l analii di rei coneneni componeni reaivi (condenaori e induori) in regime inuoidale, aggirando la compleià maemaica inrodoa dalle relazioni
Meodo della raformaa di aplace Il meodo imbolico conene di affronare l analii di rei coneneni componeni reaivi (condenaori e induori) in regime inuoidale, aggirando la compleià maemaica inrodoa dalle relazioni
Università di Napoli Parthenope Facoltà di Ingegneria
 Universià di Napoli Parenope Facolà di Ingegneria Corso di Comunicazioni Elerice docene: Prof. Vio Pascazio a Lezione: 7/04/003 Sommario Caraerizzazione energeica di processi aleaori Processi aleaori nel
Universià di Napoli Parenope Facolà di Ingegneria Corso di Comunicazioni Elerice docene: Prof. Vio Pascazio a Lezione: 7/04/003 Sommario Caraerizzazione energeica di processi aleaori Processi aleaori nel
ECONOMIA POLITICA II - ESERCITAZIONE 8 Curva di Phillips Legge di Okun - AD
 ECOOMIA POLITICA II - ESERCITAZIOE 8 Curv di Phillips Legge di Okun - AD Esercizio 1 Sino β = 0.5, α = 1, u = u n = 6%, λ = 0.5, g y = 0.03. Supponee che nell nno 0 l disoccupzione si 6% e che l bnc cenrle
ECOOMIA POLITICA II - ESERCITAZIOE 8 Curv di Phillips Legge di Okun - AD Esercizio 1 Sino β = 0.5, α = 1, u = u n = 6%, λ = 0.5, g y = 0.03. Supponee che nell nno 0 l disoccupzione si 6% e che l bnc cenrle
5. La trasformata di Laplace Esercizi
 5. L rform di Lplce Eercizi Aggiornmeno: febbrio 3 p://www.cirm.unibo.i/~brozzi/mi/pdf/mi-cp.5-ee.pdf 5.. Inroduzione ll rform di Lplce 5.. Proprieà dell rform di Lplce 5.-. Coniderimo l funzione limi
5. L rform di Lplce Eercizi Aggiornmeno: febbrio 3 p://www.cirm.unibo.i/~brozzi/mi/pdf/mi-cp.5-ee.pdf 5.. Inroduzione ll rform di Lplce 5.. Proprieà dell rform di Lplce 5.-. Coniderimo l funzione limi
Laboratorio di Algoritmi e Strutture Dati
 Laboraorio di Algorimi e Sruure Dai Aniello Murano hp://people.na.infn.i people.na.infn.i/ ~murano/ 1 Algorimi per il calcolo di percori minimi u un grafo 1 Un emplice problema Pr oblema: Supponiamo che
Laboraorio di Algorimi e Sruure Dai Aniello Murano hp://people.na.infn.i people.na.infn.i/ ~murano/ 1 Algorimi per il calcolo di percori minimi u un grafo 1 Un emplice problema Pr oblema: Supponiamo che
Capitolo 24. Elementi di calcolo finanziario
 Cpiolo 24 Elemei di clcolo fizirio 24. Le divere forme dell ieree Cpile (C, ock di moe dipoibile i u do momeo) Ieree (I, prezzo d uo del cpile) Sggio o o di ieree (r) (ieree muro dll uià di cpile,, ell
Cpiolo 24 Elemei di clcolo fizirio 24. Le divere forme dell ieree Cpile (C, ock di moe dipoibile i u do momeo) Ieree (I, prezzo d uo del cpile) Sggio o o di ieree (r) (ieree muro dll uià di cpile,, ell
Decalogo alimentazione estate 2012
 con l nu propon 10 przioi conigli pr un limnzion corr icur in un priodo gnrlmn ccompgno d mggior mpo libro, con biudini limnri divr ripo l ro dll nno: mggior numro di pi fuori c, cr nzion gli ppori nuli,
con l nu propon 10 przioi conigli pr un limnzion corr icur in un priodo gnrlmn ccompgno d mggior mpo libro, con biudini limnri divr ripo l ro dll nno: mggior numro di pi fuori c, cr nzion gli ppori nuli,
Dato un cammino P indichiamo con c(p ) il costo dell insieme di archi A(P ) del cammino, ovvero c(p )=c(a(p )) = uv P c uv. c 1
 il costo dell insieme di archi A(P ) del cammino, ovvero c(p )=c(a(p )) = uv P c uv. c 1") Capiolo 7 Cammini minimi 7. Definizioni fondamenali Sia dao un grafo non orienao G(N,A) conneo, con coi aociai agli archi c uv R per ogni uv A. Siano anche dai due nodi peciali, N. Faremo la eguene: Aunzione
Capiolo 7 Cammini minimi 7. Definizioni fondamenali Sia dao un grafo non orienao G(N,A) conneo, con coi aociai agli archi c uv R per ogni uv A. Siano anche dai due nodi peciali, N. Faremo la eguene: Aunzione
Componenti per l aritmetica binaria. Motivazioni. Sommario. Sommario. M. Favalli
 Sommrio Componenti per l ritmetic inri M. Fvlli Engineering Deprtment in Ferrr Introduzione 2 3 Appliczioni di n-it dder 4 Sommtore CLA Sommrio (ENDIF) Reti logiche / 27 Introduzione Motivzioni (ENDIF)
Sommrio Componenti per l ritmetic inri M. Fvlli Engineering Deprtment in Ferrr Introduzione 2 3 Appliczioni di n-it dder 4 Sommtore CLA Sommrio (ENDIF) Reti logiche / 27 Introduzione Motivzioni (ENDIF)
Funzioni a valori vettoriali
 Funzioni vlori veorili Definizione. Un ppliczione defini u un inieme di numeri reli il cui codominio è un n inieme dir è per definizione un funzione vlori veorili. F è un veore che h n componeni e i crive
Funzioni vlori veorili Definizione. Un ppliczione defini u un inieme di numeri reli il cui codominio è un n inieme dir è per definizione un funzione vlori veorili. F è un veore che h n componeni e i crive
Politica Economica Europea
 Poliica Economica Europea 2 Tao di cambio Obieivo: confronare il valore di uno eo bene denominao in due value divere Bene X P$ Bene X P Eprimere il valore di un bene denominao in una valua, in un alra
Poliica Economica Europea 2 Tao di cambio Obieivo: confronare il valore di uno eo bene denominao in due value divere Bene X P$ Bene X P Eprimere il valore di un bene denominao in una valua, in un alra
Risolvi i seguenti esercizi rispondi a 4 quesiti a scelta tra quelli proposti nel questionario
 Risolvi i segueni esercizi rispondi quesii scel r quelli proposi nel quesionrio Clcol le segueni primiive. Quindi c ln e. Pongo d cui segue, llor: ( e ) d ( e ) c ( e ) c e e d. sin ( ) Pongo d cui segue,
Risolvi i segueni esercizi rispondi quesii scel r quelli proposi nel quesionrio Clcol le segueni primiive. Quindi c ln e. Pongo d cui segue, llor: ( e ) d ( e ) c ( e ) c e e d. sin ( ) Pongo d cui segue,
Trasformata di Laplace unilatera Teoria
 Definizione Tafomaa di Laplace unilaea Teoia L[f()] = f() $ e ($) d = F() Dove: f() = funzione eale afomabile. E nulla pe
Definizione Tafomaa di Laplace unilaea Teoia L[f()] = f() $ e ($) d = F() Dove: f() = funzione eale afomabile. E nulla pe
STABILITA DEI SISTEMI IN RETROAZIONE CRITERIO DI ROUTH ESERCIZI
 STABILITA DEI SISTEMI IN RETROAZIONE CRITERIO DI ROUTH ESERCIZI U( ) + Stilità dei itemi in retrozione G( ) Y ( ) G( ) N ( ) G DG ( ) W ( ) G( ) NG ( ) 1 + G( ) D ( ) + N ( ) G G Nel co di un itemi G()
STABILITA DEI SISTEMI IN RETROAZIONE CRITERIO DI ROUTH ESERCIZI U( ) + Stilità dei itemi in retrozione G( ) Y ( ) G( ) N ( ) G DG ( ) W ( ) G( ) NG ( ) 1 + G( ) D ( ) + N ( ) G G Nel co di un itemi G()
Equazioni e disequazioni logaritmiche ed esponenziali. Sintesi delle teoria e guida alla risoluzione di esercizi
 Equzioni e disequzioni rimiche ed esponenzili Sinesi delle eori e guid ll risoluzione di esercizi Esponenzile Definizione: si definisce funzione esponenzile, con come vlori l qunià elev ll poenz. è l rgomeno
Equzioni e disequzioni rimiche ed esponenzili Sinesi delle eori e guid ll risoluzione di esercizi Esponenzile Definizione: si definisce funzione esponenzile, con come vlori l qunià elev ll poenz. è l rgomeno
V AK. Fig.1 Caratteristica del Diodo
 1 Raddrizzaore - Generalià I circuii raddrizzaori uilizzano componeni come i Diodi che presenano la caraerisica di unidirezionalià, cioè permeono il passaggio della correne solo in un verso. In figura
1 Raddrizzaore - Generalià I circuii raddrizzaori uilizzano componeni come i Diodi che presenano la caraerisica di unidirezionalià, cioè permeono il passaggio della correne solo in un verso. In figura
Sistemi Intelligenti Reinforcement Learning: Sommario
 Sistemi Intelligenti Reinforcement Lerning: Itertive policy evlution Alberto Borghese Università degli Studi di Milno Lbortorio di Sistemi Intelligenti Applicti (AIS-Lb) Diprtimento di Scienze dell Informzione
Sistemi Intelligenti Reinforcement Lerning: Itertive policy evlution Alberto Borghese Università degli Studi di Milno Lbortorio di Sistemi Intelligenti Applicti (AIS-Lb) Diprtimento di Scienze dell Informzione
Sistemi Intelligenti Reinforcement Learning: Equazioni di Bellman
 Siemi Intelligenti Reinforcement Lerning: Equzioni di Bellmn Alberto Borghese Università degli Studi di Milno Lbortorio di Siemi Intelligenti Applicti (AIS-Lb) Diprtimento di Scienze dell Informzione borghese@dsi.unimi.it
Siemi Intelligenti Reinforcement Lerning: Equzioni di Bellmn Alberto Borghese Università degli Studi di Milno Lbortorio di Siemi Intelligenti Applicti (AIS-Lb) Diprtimento di Scienze dell Informzione borghese@dsi.unimi.it
Definizione delle specifiche per un sistema di controllo a retroazione unitaria
 Definizione delle pecifiche per un itema di controllo a retroazione unitaria Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento
Definizione delle pecifiche per un itema di controllo a retroazione unitaria Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento
ITEC/REF E L Indice di Costo Termoelettrico. Formula
 ITC/RF L Indice di Coso Termoelerico Formul L formul dell indice ITC/RF è: ITC/RF (euro/mw) L formul di ITCccg/RF è: ITCccg/RF dove: i. è il mese di riferimeno dell indice ii. iii. e rppresenno le quoe
ITC/RF L Indice di Coso Termoelerico Formul L formul dell indice ITC/RF è: ITC/RF (euro/mw) L formul di ITCccg/RF è: ITCccg/RF dove: i. è il mese di riferimeno dell indice ii. iii. e rppresenno le quoe
Equivalenza tra equazioni di Lagrange e problemi variazionali
 Equivlenz tr equzioni di Lgrnge e problemi AM Cherubini 20 Aprile 2007 1 / 21 Problemi Mostrimo or come si possono ricvre sistemi di equzioni con struttur lgrngin in un mbito diverso: prim si er crtterizzt
Equivlenz tr equzioni di Lgrnge e problemi AM Cherubini 20 Aprile 2007 1 / 21 Problemi Mostrimo or come si possono ricvre sistemi di equzioni con struttur lgrngin in un mbito diverso: prim si er crtterizzt
Messa a punto avanzata più semplice utilizzando Funzione Load Observer
 Mea a punto avanzata più emplice utilizzando Funzione Load Oberver EMEA Speed & Poition CE Team AUL 34 Copyright 0 Rockwell Automation, Inc. All right reerved. Co è l inerzia? Tutti comprendiamo il concetto
Mea a punto avanzata più emplice utilizzando Funzione Load Oberver EMEA Speed & Poition CE Team AUL 34 Copyright 0 Rockwell Automation, Inc. All right reerved. Co è l inerzia? Tutti comprendiamo il concetto
2.4 Flussi di valore massimo
 .4 Flui di valore maimo I modelli di fluo hanno variae applicazioni in eori come elecomunicazioni informaica (muliproceori, proocolli inerne) rapori (aereo, radale, ferroviario, merci) Si raa di diribuire
.4 Flui di valore maimo I modelli di fluo hanno variae applicazioni in eori come elecomunicazioni informaica (muliproceori, proocolli inerne) rapori (aereo, radale, ferroviario, merci) Si raa di diribuire
3. Funzioni iniettive, suriettive e biiettive (Ref p.14)
") . Funzioni iniettive, suriettive e iiettive (Ref p.4) Dll definizione di funzione si ricv che, not un funzione y f( ), comunque preso un vlore di pprtenente l dominio di f( ) esiste un solo vlore di y
. Funzioni iniettive, suriettive e iiettive (Ref p.4) Dll definizione di funzione si ricv che, not un funzione y f( ), comunque preso un vlore di pprtenente l dominio di f( ) esiste un solo vlore di y
ANALISI STATISTICA DELLE VENDITE E METODI PER LA PREVISIONE
 La previione delle vendie ANALISI STATISTICA DELLE VENDITE E METODI PER LA PREVISIONE Prof. Domenico SUMMO. Premea Un imprendiore, nell eplicare la propria aivià economica, non fa alro che prevedere quali
La previione delle vendie ANALISI STATISTICA DELLE VENDITE E METODI PER LA PREVISIONE Prof. Domenico SUMMO. Premea Un imprendiore, nell eplicare la propria aivià economica, non fa alro che prevedere quali
Capitolo IV L n-polo
 Capitolo IV L n-polo Abbiamo oervato che una qualiai rete, vita da due nodi, diventa, a tutti gli effetti eterni, un bipolo unico e queto è in qualche miura ovvio e abbiamo anche motrato come cotruire
Capitolo IV L n-polo Abbiamo oervato che una qualiai rete, vita da due nodi, diventa, a tutti gli effetti eterni, un bipolo unico e queto è in qualche miura ovvio e abbiamo anche motrato come cotruire
1 b a. f(x) dx. Osservazione 1.2. Se indichiamo con µ il valore medio di f su [a, b], abbiamo che. f(x) dx = µ(b a) =
![1 b a. f(x) dx. Osservazione 1.2. Se indichiamo con µ il valore medio di f su [a, b], abbiamo che. f(x) dx = µ(b a) =](/thumbs/19/319521.jpg "1 b a. f(x) dx. Osservazione 1.2. Se indichiamo con µ il valore medio di f su [a, b], abbiamo che. f(x) dx = µ(b a) =") Note ed esercizi di Anlisi Mtemtic - (Fosci) Ingegneri dell Informzione - 28-29. Lezione del 7 novembre 28. Questi esercizi sono reperibili dll pgin web del corso ttp://utenti.unife.it/dmino.fosci/didttic/mii89.tml
Note ed esercizi di Anlisi Mtemtic - (Fosci) Ingegneri dell Informzione - 28-29. Lezione del 7 novembre 28. Questi esercizi sono reperibili dll pgin web del corso ttp://utenti.unife.it/dmino.fosci/didttic/mii89.tml
MACCHINE ELETTRICHE. Macchine Asincrone. Stefano Pastore. Dipartimento di Ingegneria e Architettura Corso di Elettrotecnica (IN 043) a.a.
 a.a.") MACCHNE ELETTCHE Mcchine Aincrone Stefno Ptore Diprtimento di ngegneri e Architettur Coro di Elettrotecnic (N 043).. 0-3 ntroduzione Sono dette Mcchine d nduzione (trife) otore gbbi o rotore vvolto Sttore
MACCHNE ELETTCHE Mcchine Aincrone Stefno Ptore Diprtimento di ngegneri e Architettur Coro di Elettrotecnic (N 043).. 0-3 ntroduzione Sono dette Mcchine d nduzione (trife) otore gbbi o rotore vvolto Sttore
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Antitrasformata di Laplace PROCEDIMENTI DI ANTITRASFORMAZIONE
 Antitrasformata di Laplace PROCEDIMENTI DI ANTITRASFORMAZIONE") PROCEDIMENTI DI ANTITRASFORMAZIONE L'operazione di paaggio invero dal dominio della frequenza complea al dominio del tempo F() f(t) è detta antitraformata o traformazione invera di Laplace. Data una funzione
PROCEDIMENTI DI ANTITRASFORMAZIONE L'operazione di paaggio invero dal dominio della frequenza complea al dominio del tempo F() f(t) è detta antitraformata o traformazione invera di Laplace. Data una funzione
Lezione 5. Calcolo dell antitrasformata di Laplace. F. Previdi - Automatica - Lez. 5 1
 Lezione 5. Calcolo dell aniraormaa di Laplace. Previdi - Auomaica - Lez. 5 Schema della lezione. Inroduzione. Aniraormazione di Laplace. Srumeni per l aniraormazione 4. Teorema del valore iniziale 5. Teorema
Lezione 5. Calcolo dell aniraormaa di Laplace. Previdi - Auomaica - Lez. 5 Schema della lezione. Inroduzione. Aniraormazione di Laplace. Srumeni per l aniraormazione 4. Teorema del valore iniziale 5. Teorema
VALUTAZIONE ECONOMICA E VALORE DI OPZIONE: IL CASO DEL TRASPORTO FERROVIARIO
 VALUTAZIONE ECONOMICA E VALORE DI OPZIONE: IL CASO DEL TRASPORTO FERROVIARIO di Psqule Lucio Scndizzo Universià degli Sudi di Rom Tor Verg. VALUTAZIONE ECONOMICA E VALORE DI OPZIONE: IL CASO DEL TRASPORTO
VALUTAZIONE ECONOMICA E VALORE DI OPZIONE: IL CASO DEL TRASPORTO FERROVIARIO di Psqule Lucio Scndizzo Universià degli Sudi di Rom Tor Verg. VALUTAZIONE ECONOMICA E VALORE DI OPZIONE: IL CASO DEL TRASPORTO
Tassi di cambio, prezzi e
 Tssi di cmbio, prezzi e tssi di interesse 2009 1 Introduzione L relzione tr l ndmento del livello generle dei prezzi e i tssi di cmbio: l Prità dei Poteri di Acquisto Le relzione tr i tssi di cmbio e i
Tssi di cmbio, prezzi e tssi di interesse 2009 1 Introduzione L relzione tr l ndmento del livello generle dei prezzi e i tssi di cmbio: l Prità dei Poteri di Acquisto Le relzione tr i tssi di cmbio e i
Lezione 11. Inflazione, produzione e crescita della moneta
 Lezione 11 (BAG cap. 10) Inflazione, produzione e crescia della monea Corso di Macroeconomia Prof. Guido Ascari, Universià di Pavia Tre relazioni ra produzione, disoccupazione e inflazione Legge di Okun
Lezione 11 (BAG cap. 10) Inflazione, produzione e crescia della monea Corso di Macroeconomia Prof. Guido Ascari, Universià di Pavia Tre relazioni ra produzione, disoccupazione e inflazione Legge di Okun
Circuito Simbolico. Trasformazione dei componenti
 Circuito Simbolico Principio di bae E poibile applicare a tutte le leggi matematiche che regolano un circuito la traformata di Laplace, in modo da ottenere un nuovo circuito con delle proprietà differenti.
Circuito Simbolico Principio di bae E poibile applicare a tutte le leggi matematiche che regolano un circuito la traformata di Laplace, in modo da ottenere un nuovo circuito con delle proprietà differenti.
Equazioni e disequazioni logaritmiche ed esponenziali. Guida alla risoluzione di esercizi
 Equzioni e disequzioni rimiche ed esponenzili Guid ll risoluzione di esercizi Esponenzile Definizione: si definisce funzione esponenzile, con come vlori l qunià elev ll poenz. è l rgomeno dell esponenzile,
Equzioni e disequzioni rimiche ed esponenzili Guid ll risoluzione di esercizi Esponenzile Definizione: si definisce funzione esponenzile, con come vlori l qunià elev ll poenz. è l rgomeno dell esponenzile,
Sviluppare una metodologia di analisi per valutare la convenienza economica di un nuovo investimento, tenendo conto di alcuni fattori rilevanti:
 Analisi degli Invesimeni Obieivo: Sviluppare una meodologia di analisi per valuare la convenienza economica di un nuovo invesimeno, enendo cono di alcuni faori rilevani: 1. Dimensione emporale. 2. Grado
Analisi degli Invesimeni Obieivo: Sviluppare una meodologia di analisi per valuare la convenienza economica di un nuovo invesimeno, enendo cono di alcuni faori rilevani: 1. Dimensione emporale. 2. Grado
si definisce Funzione Integrale; si chiama funzione integrale in quanto il suo * x
 Appunti elorti dll prof.ss Biondin Gldi Funzione integrle Si y = f() un funzione continu in un intervllo [; ] e si 0 [; ]; l integrle 0 f()d si definisce Funzione Integrle; si chim funzione integrle in
Appunti elorti dll prof.ss Biondin Gldi Funzione integrle Si y = f() un funzione continu in un intervllo [; ] e si 0 [; ]; l integrle 0 f()d si definisce Funzione Integrle; si chim funzione integrle in
Ottimizzazione Combinatoria Formulazioni e Formulazioni Ottime
 Oimizzazione Combinaoria Formulazioni e Formulazioni Oime Prof. Anonio Saano Diparimeno di Informaica e Siemiica Univerià di Roma La Sapienza A.A. 29 Formulazione Lineare Problema di PL: min {c T x : xs}
Oimizzazione Combinaoria Formulazioni e Formulazioni Oime Prof. Anonio Saano Diparimeno di Informaica e Siemiica Univerià di Roma La Sapienza A.A. 29 Formulazione Lineare Problema di PL: min {c T x : xs}
Le ipotesi di base che si utilizzano sono le stesse quattro già viste con riferimento al caso della flessione semplice e cioè:
 LEZIONI N 44 E 45 CALCOLO A ROTTURA DELLA SEZIONE PRESSOINFLESSA PROBLEMI DI VERIFICA La procedura di verifica dei pilatri di c.a., ottopoti a forzo normale e momento flettente, è baata ulla cotruzione
LEZIONI N 44 E 45 CALCOLO A ROTTURA DELLA SEZIONE PRESSOINFLESSA PROBLEMI DI VERIFICA La procedura di verifica dei pilatri di c.a., ottopoti a forzo normale e momento flettente, è baata ulla cotruzione
1 REGOLE DI INTEGRAZIONE
 UNIVERSITÀ DEGLI STUDI DI ROMA LA SAPIENZA - Fcolà di Frmci e Medicin - Corso di Lure in CTF REGOLE DI INTEGRAZIONE. REGOLA DI INTEGRAZIONE PER PARTI f(x)g (x)dx = f(x)g(x) g(x)f (x)dx f(x)dg(x) = f(x)g(x)
UNIVERSITÀ DEGLI STUDI DI ROMA LA SAPIENZA - Fcolà di Frmci e Medicin - Corso di Lure in CTF REGOLE DI INTEGRAZIONE. REGOLA DI INTEGRAZIONE PER PARTI f(x)g (x)dx = f(x)g(x) g(x)f (x)dx f(x)dg(x) = f(x)g(x)
22 - Il principio dei lavori virtuali
 - Il principio dei lavori virtuali ü [.a. 0-0 : ultima reviione 5 aprile 0] Eempio n. Si conideri il portale di Figura, emplicemente ipertatico. Si vuole applicare il principio dei lavori virtuali per
- Il principio dei lavori virtuali ü [.a. 0-0 : ultima reviione 5 aprile 0] Eempio n. Si conideri il portale di Figura, emplicemente ipertatico. Si vuole applicare il principio dei lavori virtuali per
CAPITOLO 9 - RETI DINAMICHE NEL DOMINIO DELLA FREQUENZA
 G. SUPT FUGA MT D TOA D T ovembre CAPTOO 9 - T DAMCH DOMO DA FQUZA pag. / CAPTOO 9 - T DAMCH DOMO DA FQUZA TODUZO l meodo della raformaa di aplace, chiamao anche analii nel dominio della frequenza, è una
G. SUPT FUGA MT D TOA D T ovembre CAPTOO 9 - T DAMCH DOMO DA FQUZA pag. / CAPTOO 9 - T DAMCH DOMO DA FQUZA TODUZO l meodo della raformaa di aplace, chiamao anche analii nel dominio della frequenza, è una
Problemi di collegamento delle strutture in acciaio
 1 Problemi di collegmento delle strutture in cciio Unioni con bulloni soggette tglio Le unioni tglio vengono generlmente utilizzte negli elementi compressi, quli esempio le unioni colonn-colonn soggette
1 Problemi di collegmento delle strutture in cciio Unioni con bulloni soggette tglio Le unioni tglio vengono generlmente utilizzte negli elementi compressi, quli esempio le unioni colonn-colonn soggette
GRANDEZZE PERIODICHE
 GRNDEZZE PERIODICHE Un grndezz empodipendene (), che supponimo rele, si definisce periodic qundo d u- guli inervlli ssume vlori uguli, cioè qundo vle l relzione (con n inero qulsisi): ( ) ( n) + () - Il
GRNDEZZE PERIODICHE Un grndezz empodipendene (), che supponimo rele, si definisce periodic qundo d u- guli inervlli ssume vlori uguli, cioè qundo vle l relzione (con n inero qulsisi): ( ) ( n) + () - Il
Teorema del Limite Centrale
 Teorema del Limite Centrale Una combinazione lineare W = a 1 X + a Y + a 3 Z +., di variabili aleatorie indipendenti X,Y,Z, ciacuna avente una legge di ditribuzione qualiai ma con valori attei comparabili
Teorema del Limite Centrale Una combinazione lineare W = a 1 X + a Y + a 3 Z +., di variabili aleatorie indipendenti X,Y,Z, ciacuna avente una legge di ditribuzione qualiai ma con valori attei comparabili
Note su alcuni principi fondamentali di macroeconomia Versione parziale e provvisoria. Claudio Sardoni Sapienza Università di Roma
 Note u alcuni principi fondamentali di macroeconomia Verione parziale e provvioria Claudio Sardoni Sapienza Univerità di Roma Anno accademico 2010-2011 ii Indice Premea v I Il breve periodo 1 1 Il fluo
Note u alcuni principi fondamentali di macroeconomia Verione parziale e provvioria Claudio Sardoni Sapienza Univerità di Roma Anno accademico 2010-2011 ii Indice Premea v I Il breve periodo 1 1 Il fluo
Stabilità dei sistemi di controllo in retroazione
 Stbilità dei sistemi di controllo in retrozione Criterio di Nyquist Il criterio di Nyquist Estensione G (s) con gudgno vribile Appliczione sistemi con retrozione positiv 2 Criterio di Nyquist Stbilità
Stbilità dei sistemi di controllo in retrozione Criterio di Nyquist Il criterio di Nyquist Estensione G (s) con gudgno vribile Appliczione sistemi con retrozione positiv 2 Criterio di Nyquist Stbilità
Descrizione generale di Spice
 Decrizione generale di Spice SPIE A/D (Simulation Program with Integrated ircuit Emphai Analog/Digital) Ppice è un imulatore circuitale di uo generale, prodotto dalla ADENE Il imulatore Spice è uno dei
Decrizione generale di Spice SPIE A/D (Simulation Program with Integrated ircuit Emphai Analog/Digital) Ppice è un imulatore circuitale di uo generale, prodotto dalla ADENE Il imulatore Spice è uno dei
Strumenti della Teoria dei Giochi per l Informatica A.A. 2009/10. Lecture 11: 13-14 Maggio 2010. Meccanismi per la Condivisione dei Costi
 Strumenti della Teoria dei Giochi per l Informatica A.A. 2009/0 Lecture : 3-4 Maggio 200 Meccanimi per la Condiviione dei Coti Docente Paolo Penna Note redatte da: Paolo Penna Primo Eempio Vogliamo vendere
Strumenti della Teoria dei Giochi per l Informatica A.A. 2009/0 Lecture : 3-4 Maggio 200 Meccanimi per la Condiviione dei Coti Docente Paolo Penna Note redatte da: Paolo Penna Primo Eempio Vogliamo vendere
INTEGRALE IN SENSO IMPROPRIO E INTEGRALE DI LEBESGUE
 INTEGRALE IN SENSO IMPROPRIO E INTEGRALE DI LEBESGUE OSSERVAZIONI ED ESEMPI Si f : [,+ ) : R inegrbile in senso improprio. Se,, f() llor f è inegrbile secondo Lebesgue, e i due inegrli coincidono. Infi
INTEGRALE IN SENSO IMPROPRIO E INTEGRALE DI LEBESGUE OSSERVAZIONI ED ESEMPI Si f : [,+ ) : R inegrbile in senso improprio. Se,, f() llor f è inegrbile secondo Lebesgue, e i due inegrli coincidono. Infi
Sistemi Intelligenti Reinforcement Learning: Iterative policy evaluation
 Siemi Inelligeni Reinfocemen Lening: Ieive policy evluion Albeo Boghee Univeià degli Sudi di Milno Lbooio di Siemi Inelligeni Applici (AIS-Lb Dipimeno di Infomic boghee@di.unimi.i /53 Sommio Le equzioni
Siemi Inelligeni Reinfocemen Lening: Ieive policy evluion Albeo Boghee Univeià degli Sudi di Milno Lbooio di Siemi Inelligeni Applici (AIS-Lb Dipimeno di Infomic boghee@di.unimi.i /53 Sommio Le equzioni
Ottimizzazione Combinatoria Massimo Flusso - Algoritmi ANTONIO SASSANO
 Oimizzazione Combinaoria Maimo Fluo - Algorimi ANTONIO SASSANO Univerià di Roma La Sapienza Diparimeno di Informaica e Siemiica Coro di Laurea in Ingegneria Geionale Roma, 13 Giugno 2006 1 Maimo Fluo:
Oimizzazione Combinaoria Maimo Fluo - Algorimi ANTONIO SASSANO Univerià di Roma La Sapienza Diparimeno di Informaica e Siemiica Coro di Laurea in Ingegneria Geionale Roma, 13 Giugno 2006 1 Maimo Fluo:
Acidi Deboli. Si definisce acido debole un acido con K a < 1 che risulta perciò solo parzialmente dissociato in soluzione. Esempi di acidi deboli:
 Acidi Deboli Si definisce cido debole un cido con < 1 che risult perciò solo przilmente dissocito in soluzione. Esempi di cidi deboli: Acido cetico (H OOH) 1.75 1-5 Acido scorbico (vitmin ) 1 6.76 1-5.5
Acidi Deboli Si definisce cido debole un cido con < 1 che risult perciò solo przilmente dissocito in soluzione. Esempi di cidi deboli: Acido cetico (H OOH) 1.75 1-5 Acido scorbico (vitmin ) 1 6.76 1-5.5
Sintesi tramite il luogo delle radici
 Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Applicazioni del Massimo flusso. Progettazione di Algoritmi a.a Matricole congrue a 1 Docente: Annalisa De Bonis
 Applicazioni del Maimo fluo Progeazione di Algorimi a.a. 0-6 Maricole congrue a Docene: Annalia De Boni Maching bipario Problema del max maching. Inpu: grafo non direzionao G = (V, E). M E e` un maching
Applicazioni del Maimo fluo Progeazione di Algorimi a.a. 0-6 Maricole congrue a Docene: Annalia De Boni Maching bipario Problema del max maching. Inpu: grafo non direzionao G = (V, E). M E e` un maching
Compitino di algebra lineare e geometria del 30 Novembre 2007 VERSIONE A
 Compiino di lgebr linere e geomeri del Novembre 7 VERSIONE A Nome e cognome: Oo Perseien Numero di Mricol: 48 Aenzione: riporre i di personli su ogni foglio consegno Esercizio. Si A = Sudire il sisem linere
Compiino di lgebr linere e geomeri del Novembre 7 VERSIONE A Nome e cognome: Oo Perseien Numero di Mricol: 48 Aenzione: riporre i di personli su ogni foglio consegno Esercizio. Si A = Sudire il sisem linere
Per ogni domanda ci può essere più di una risposta esatta. Puoi confrontarti con i tuoi compagni. Domanda Risposta A Risposta B Risposta C Risposta D
 CON UN MICO CON UN MICO Pe ogni domnd ci può eee più di un ipo e. Puoi confoni con i uoi compgni. SRCIZI Domnd Ripo Ripo Ripo C Ripo D 1 Le due ee ono pependicoli pllele incideni pni enmbe pe Z z 2 Le
CON UN MICO CON UN MICO Pe ogni domnd ci può eee più di un ipo e. Puoi confoni con i uoi compgni. SRCIZI Domnd Ripo Ripo Ripo C Ripo D 1 Le due ee ono pependicoli pllele incideni pni enmbe pe Z z 2 Le
( ) ( ) ( ) Modulo C Unità 1 Il moto rettilineo. Sistemi di riferimento e moto
 ( ) ( ) Modulo C Unità 1 Il moto rettilineo. Sistemi di riferimento e moto") Siemi di riferimen e m Un crp è in m qund l u pizine ripe d un lr crp, un cme riferimen, ri nel emp. Il pun merile durne il u m decrie un line de Trieri del m. E può eere reiline curiline ed il m dicei
Siemi di riferimen e m Un crp è in m qund l u pizine ripe d un lr crp, un cme riferimen, ri nel emp. Il pun merile durne il u m decrie un line de Trieri del m. E può eere reiline curiline ed il m dicei
Stato quasi stabile: il circuito rimane in questo stato per un tempo prestabilito per poi passare nell altro stato.
 MULIIBRAORI i dice muliirore un circuio che può ere solo due possiili si dell usci. li si possono essere di due ipi: so sile, so qusi sile. o sile: il circuio rimne in queso so finché non si ineriene dll
MULIIBRAORI i dice muliirore un circuio che può ere solo due possiili si dell usci. li si possono essere di due ipi: so sile, so qusi sile. o sile: il circuio rimne in queso so finché non si ineriene dll
Corso di Microonde II
 POITECNICO DI MIANO Coro di Microonde II ezi n. 3: Generalità ugli amplificatori ineari Coro di aurea pecialitica in Ingegneria delle Telecomunicazi Circuiti attivi a microonde (Amplificatori) V in Z g
POITECNICO DI MIANO Coro di Microonde II ezi n. 3: Generalità ugli amplificatori ineari Coro di aurea pecialitica in Ingegneria delle Telecomunicazi Circuiti attivi a microonde (Amplificatori) V in Z g
Progettazione di Algoritmi Anno Accademico Esercizi su Grafi: Parte Seconda
 Progeazione di Algorimi Anno Accademico 0 09 Eercizi Ugo Vaccaro Eercizi u Grafi: Pare Seconda N.B. Si ricorda che ogni algorimo và accompagnao da una argomenazione ul perchè calcola correamene l oupu
Progeazione di Algorimi Anno Accademico 0 09 Eercizi Ugo Vaccaro Eercizi u Grafi: Pare Seconda N.B. Si ricorda che ogni algorimo và accompagnao da una argomenazione ul perchè calcola correamene l oupu
Cinematica I. 1) Definizione di moto
 Definizione di moto") Cineic I L cineic i occup dell decrizione del oo. Affronereo queo rgoeno nell coidde pproizione di puno erile: i corpi rnno conideri enz dienione oero equileni dei puni eici. Ciò equile dire che le dienioni
Cineic I L cineic i occup dell decrizione del oo. Affronereo queo rgoeno nell coidde pproizione di puno erile: i corpi rnno conideri enz dienione oero equileni dei puni eici. Ciò equile dire che le dienioni
Note per la Lezione 29 Ugo Vaccaro
 Progeaione di Algorimi Anno Accademico 1 1 Noe per la Leione Ugo Vaccaro In quea leione coninueremo lo udio di cammini minimin grafi in cui vi poono eere archi di coo negaivo. Ricordiamo l algorimo baao
Progeaione di Algorimi Anno Accademico 1 1 Noe per la Leione Ugo Vaccaro In quea leione coninueremo lo udio di cammini minimin grafi in cui vi poono eere archi di coo negaivo. Ricordiamo l algorimo baao
Trasformata di Laplace ESEMPI DI MODELLIZZAZIONE
 Traformata di Laplace ESEMPI DI MODELLIZZAZIONE Introduzione La traformata di Laplace i utilizza nel momento in cui è tata individuata la funzione di traferimento La F.d.T è una equazione differenziale
Traformata di Laplace ESEMPI DI MODELLIZZAZIONE Introduzione La traformata di Laplace i utilizza nel momento in cui è tata individuata la funzione di traferimento La F.d.T è una equazione differenziale
Lezione n.12. Gerarchia di memoria
 Lezione n.2 Gerarchia di memoria Sommario: Conceo di gerarchia Principio di localià Definizione di hi raio e miss raio La gerarchia di memoria Il sisema di memoria è molo criico per le presazioni del calcolaore.
Lezione n.2 Gerarchia di memoria Sommario: Conceo di gerarchia Principio di localià Definizione di hi raio e miss raio La gerarchia di memoria Il sisema di memoria è molo criico per le presazioni del calcolaore.
Introduzione all algebra
 Introduzione ll lgebr E. Modic ersmo@glois.it Liceo Scientifico Sttle S. Cnnizzro Corso P.O.N. Modelli mtemtici e reltà A.S. 2010/2011 Premess Codificre e Decodificre Nell vit quotidin ci cpit spesso di
Introduzione ll lgebr E. Modic ersmo@glois.it Liceo Scientifico Sttle S. Cnnizzro Corso P.O.N. Modelli mtemtici e reltà A.S. 2010/2011 Premess Codificre e Decodificre Nell vit quotidin ci cpit spesso di
Lezione 9. Calcolo dell antitrasformata di Laplace. F. Previdi - Fondamenti di Automatica - Lez. 9 1
 ezione 9. Calcolo dell aniraormaa di aplace. Previdi - ondameni di Auomaica - ez. 9 Schema della lezione. Inroduzione. Aniraormazione di aplace. Srumeni per l aniraormazione 4. Teorema del valore iniziale
ezione 9. Calcolo dell aniraormaa di aplace. Previdi - ondameni di Auomaica - ez. 9 Schema della lezione. Inroduzione. Aniraormazione di aplace. Srumeni per l aniraormazione 4. Teorema del valore iniziale
Capitolo. Il comportamento dei sistemi di controllo in regime permanente. 6.1 Classificazione dei sistemi di controllo. 6.2 Errore statico: generalità
 Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
La programmazione aggregata nella supply chain. La programmazione aggregata nella supply chain 1
 La programmazione aggregaa nella supply chain La programmazione aggregaa nella supply chain 1 Linea guida Il ruolo della programmazione aggregaa nella supply chain Il problema della programmazione aggregaa
La programmazione aggregaa nella supply chain La programmazione aggregaa nella supply chain 1 Linea guida Il ruolo della programmazione aggregaa nella supply chain Il problema della programmazione aggregaa
Imparare: cosa, come, perché.
 GIOCO n. 1 Imprre: cos, come, perché. L pprendimento scolstico non è solo questione di metodo di studio, m di numerose situzioni di tipo personle e di gruppo, oppure legte l contesto in cui pprendimo.
GIOCO n. 1 Imprre: cos, come, perché. L pprendimento scolstico non è solo questione di metodo di studio, m di numerose situzioni di tipo personle e di gruppo, oppure legte l contesto in cui pprendimo.
INTEGRALI IMPROPRI. f(x) dx. e la funzione f(x) si dice integrabile in senso improprio su (a, b]. Se tale limite esiste ma
![INTEGRALI IMPROPRI. f(x) dx. e la funzione f(x) si dice integrabile in senso improprio su (a, b]. Se tale limite esiste ma](/thumbs/17/120065.jpg "INTEGRALI IMPROPRI. f(x) dx. e la funzione f(x) si dice integrabile in senso improprio su (a, b]. Se tale limite esiste ma") INTEGRALI IMPROPRI. Integrli impropri su intervlli itti Dt un funzione f() continu in [, b), ponimo ε f() = f() ε + qundo il ite esiste. Se tle ite esiste finito, l integrle improprio si dice convergente
INTEGRALI IMPROPRI. Integrli impropri su intervlli itti Dt un funzione f() continu in [, b), ponimo ε f() = f() ε + qundo il ite esiste. Se tle ite esiste finito, l integrle improprio si dice convergente
Siano α(x), β(x) due funzioni continue in un intervallo [a, b] IR tali che. α(x) β(x).
![Siano α(x), β(x) due funzioni continue in un intervallo [a, b] IR tali che. α(x) β(x).](/thumbs/22/1643654.jpg "Siano α(x), β(x) due funzioni continue in un intervallo [a, b] IR tali che. α(x) β(x).") OMINI NORMALI. efinizione Sino α(), β() due funzioni continue in un intervllo [, b] IR tli che L insieme del pino (figur 5. pg. ) α() β(). = {(, ) [, b] IR : α() β()} si chim dominio normle rispetto ll
OMINI NORMALI. efinizione Sino α(), β() due funzioni continue in un intervllo [, b] IR tli che L insieme del pino (figur 5. pg. ) α() β(). = {(, ) [, b] IR : α() β()} si chim dominio normle rispetto ll
Statica del corpo rigido: esercizi svolti dai compitini degli anni precedenti
 Statica de corpo riido: eercizi voti dai compitini dei anni precedenti II COMPITIO 00 003 Un ae di eno orizzontae omoenea, di maa M0 k e unhezza L m, è appoiata u due cavaetti. L ae pore di 60 cm otre
Statica de corpo riido: eercizi voti dai compitini dei anni precedenti II COMPITIO 00 003 Un ae di eno orizzontae omoenea, di maa M0 k e unhezza L m, è appoiata u due cavaetti. L ae pore di 60 cm otre
Ulteriori problemi di fisica e matematica
 Facoltà di Medicina e Chirurgia Università degli Studi di Firenze Agosto 2010 Ulteriori problemi di fisica e matematica Giovanni Romano Perché un raggio di luce proveniente dal Sole e fatto passare attraverso
Facoltà di Medicina e Chirurgia Università degli Studi di Firenze Agosto 2010 Ulteriori problemi di fisica e matematica Giovanni Romano Perché un raggio di luce proveniente dal Sole e fatto passare attraverso
d y d u + u y des C(s) F(s) Esercizio 1 Si consideri lo schema di controllo riportato in figura:
 F(s) Esercizio 1 Si consideri lo schema di controllo riportato in figura:") Eercizio Si conideri lo chema di controllo riportato in figura: y de e C() d u u F() d y y Applicando le regole di algebra dei blocchi, calcolare le eguenti funzioni di traferimento: y() a) W y,dy() =
Eercizio Si conideri lo chema di controllo riportato in figura: y de e C() d u u F() d y y Applicando le regole di algebra dei blocchi, calcolare le eguenti funzioni di traferimento: y() a) W y,dy() =
Facoltà di Economia - Università di Sassari Anno Accademico 2004-2005. Dispense Corso di Econometria Docente: Luciano Gutierrez.
 Fcoltà di Economi - Università di Sssri Anno Accdemico 2004-2005 Dispense Corso di Econometri Docente: Lucino Gutierrez Algebr Linere Progrmm: 1.1 Definizione di mtrice e vettore 1.2 Addizione e sottrzione
Fcoltà di Economi - Università di Sssri Anno Accdemico 2004-2005 Dispense Corso di Econometri Docente: Lucino Gutierrez Algebr Linere Progrmm: 1.1 Definizione di mtrice e vettore 1.2 Addizione e sottrzione
Università di Napoli Parthenope Facoltà di Ingegneria
 Universià di Napoi Parhenope Facoà di Ingegneria Corso di Comunicazioni Eeriche docene: Pro. Vio Pascazio 14 a Lezione: 8/5/3 Sommario Fasori Segnai passabanda Trasmissione di segnai passabanda in sisemi
Universià di Napoi Parhenope Facoà di Ingegneria Corso di Comunicazioni Eeriche docene: Pro. Vio Pascazio 14 a Lezione: 8/5/3 Sommario Fasori Segnai passabanda Trasmissione di segnai passabanda in sisemi
Il volume del cilindro è dato dal prodotto della superficie di base per l altezza, quindi
 Mtemtic per l nuov mturità scientific A. Bernrdo M. Pedone 3 Questionrio Quesito 1 Provre che un sfer è equivlente i /3 del cilindro circoscritto. r 4 3 Il volume dell sfer è 3 r Il volume del cilindro
Mtemtic per l nuov mturità scientific A. Bernrdo M. Pedone 3 Questionrio Quesito 1 Provre che un sfer è equivlente i /3 del cilindro circoscritto. r 4 3 Il volume dell sfer è 3 r Il volume del cilindro