ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
|
|
|
- Enzo Ippolito
- 8 anni fa
- Visualizzazioni
Transcript
1 ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI ()
")
2 Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo

3 La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni Nelle applicazioni percepire = misurare

4 Applicazioni della visione 3D - Ricostruzione di scene statiche (rilievo 3D) - Analisi di scene dinamiche (stima moto/forma oggetti) - Navigazione 3D Queste applicazioni sono possibili con: 1) Telecamere multiple (stereo) 2) Telecamera singola + moto (Structure From Motion) 3) Telecamera singola + conoscenza a priori (invers.prospettica)
 3) Telecamera singola + conoscenza a priori")
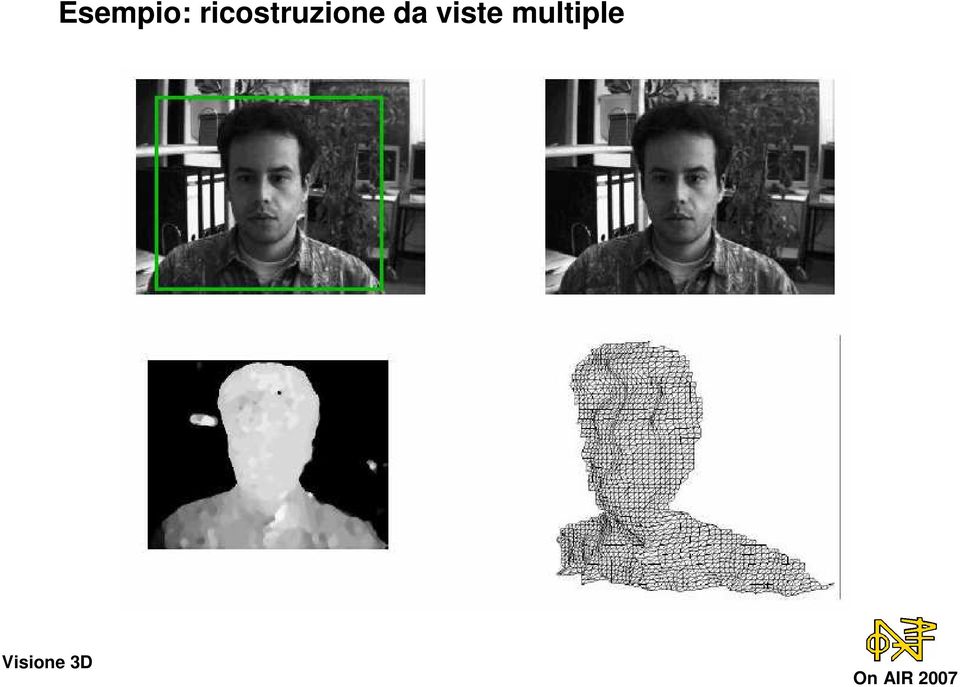
5 Esempio: ricostruzione da viste multiple

6 Esempio: ricostruzione da viste multiple
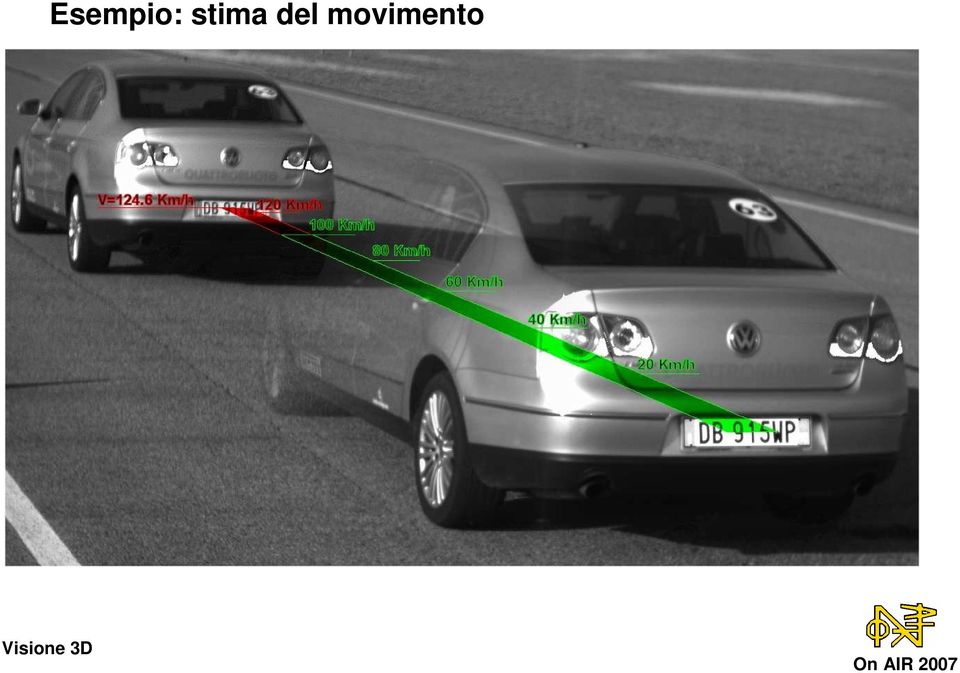
7 Esempio: stima del movimento
8 Sistemi di Coordinate Omogenee

9 I sistemi di coordinate omogenee consentono di trasformare sistemi di coordinate mediante una singola trasformazione matriciale

10 Consideriamo corpi rigidi, cioè oggetti non deformabili Un corpo rigido nello spazio è completamente descritto dalla sua posizione e orientazione rispetto a un dato sistema di coordinate (posa) Sia O XYZ il sistema di coordinate ortonormale e siano X,Y,Z i vettori unitari orientati lungo gli assi La posizione di un punto o in O XYZ è data da Qual è la posizione e l orientazione di un oggetto?

11 Consideriamo un ulteriore sistema di coordinate O XYZ solidale con l oggetto La posa dell oggetto è definita dalla posa del sistema di coordinate dell oggetto Occorre determinare la posa di O XYZ in O XYZ, cioè come O XYZ è ruotato e traslato per ottenere O XYZ

12 La traslazione è semplicemente il vettore o La rotazione è descritta mediante matrici di rotazione

13 Le rotazioni elementari sono rotazioni rispetto agli assi Le 3 rotazioni elementari in 3D sono rotazione rispetto all asse X rotazione rispetto all asse Y rotazione rispetto all asse Z Matrice d identità 3x3

14 Ogni dominio applicativo ha il suo linguaggio...

15 Trasformazione generale tra sistemi di coordinate 3D Coordinate del punto in O XYZ Matrice di rotazione che descrive l orientazione di O XYZ rispetto a O XYZ Coordinate del punto in O XYZ Coordinate dell origine di O XYZ (in O XYZ )

16 Perciò la trasformazione tra due qualsiasi sistemi di coordinate è data da Usando coordinate omogenee aggiungiamo 1 come ulteriore componente di ogni sistema di coordinate Un punto nello spazio 3D è descritto come Questo può essere implementato come singola moltiplicazione usando in coordinate omogenee

17 Ciò consente di scrivere la trasformazione come Rappresentazione non omogenea Rappresentazione omogenea

18 Modello di Camera Pin-hole
19 Camera Pin-hole Oggetto nello spazio 3D Film / piano dell immagine Pin-hole Lunghezza focale Profondità Z Asse ottico Piano dell immagine Centro della camera

20 E consuetudine rappresentare il piano dell immagine di fronte al punto focale Perciò, la camera pin-hole è tipicamente rappresentata come Centro della camera Profondità Z Asse ottico Lunghezza focale Piano dell immagine Il punto 3D a profondità Z e distanza X dall asse ottico nello spazio 3D si mappa in

21 Il punto 3D (X,Y,Z) è proiettato sul piano immagine in Lunghezza focale f piano dell immagine punto principale
22 Possiamo esprimere in coordinate omogenee la proiezione di punti 3D sul piano immagine nella forma punto dell immagine Lunghezza focale f piano dell immagine
23 Il punto 3D (X,Y,Z) è proiettato sul piano immagine in Questo può essere scritto come Usando coordinate omogenee questo può essere espresso come trasformazione lineare dove uguale a meno di un fattore di scala
24 Relazione lineare tra coordinate sul piano immagine (mm) e coordinate sulla matrice immagine (pixel) dove e Matrice di calibrazione La matrice di calibrazione descrive completamente i parametri interni della telecamera è una matrice 3x3 triangolare superiore il rapporto α y / α x è detto rapporto di aspetto
25 Siamo ora pronti per descrivere come proiettare un punto 3D sull immagine 1. Trasformare i punti 3D nelle coordinate della telecamera 2. Proiettare i punti sul piano dell immagine 3. Mappare i punti sul piano dell immagine nelle coordinate dell immagine
26 La telecamera proiettiva è una trasformazione lineare tra sistemi di coordinate omogenee punto dell immagine punto della scena
27 Una telecamera proiettiva è un dispositivo di misura di angoli tra raggi Un punto sull immagine corrisponde a un qualunque punto 3D sul raggio uscente dal centro e passante per il punto immagine Lunghezza focale f piano dell immagine punto principale
28 Misura dell angolo fra raggi dove
29 Calibrazione della telecamera
30 Una telecamera è caratterizzata da 4 parametri intrinseci fattore di scala nella direzione x fattore di scala nella direzione y centro di proiezione sul piano immagine La matrice di calibrazione K della telecamera contiene i 4 parametri intrinseci:
31 Una telecamera è caratterizzata anche da 6 parametri estrinseci (3 traslazioni e 3 rotazioni) che descrivono la posizione e l orientazione della telecamera rispetto al sistema di coordinate di riferimento
32 Definizione del problema numerico della calibrazione: Date n corrispondenze x i X i dove X i è un punto della scena e x i la sua immagine Calcolare P = K [ R t ] tale che x i = PX i L algoritmo di calibrazione della telecamera è composto da due parti: I. Calcolare la matrice P per un insieme di punti corrispondenti II. Decomporre P in K, R e t attraverso la decomposizione QR
33 Ogni corrispondenza genera due equazioni Moltiplicando si ottengono equazioni lineari negli elementi della matrice P Riordinando i termini comuni si ottiene con
34 Soluzione per P I. Si concatenano le equazioni da (n 6) corrispondenze per ottenere 2n equazioni simultanee, che possono essere scritte come: Ap = 0, dove A è una matrice 2n x 12 II. In generale non esiste una soluzione esatta, ma si cerca una soluzione (lineare) che minimizza Ap, vincolato a p = 1 come autovettore corrispondente all autovalore minimo di A T A, oppure come vettore corrispondente al valore singolare minimo dello SVD di A.
35 III. Questa soluzione lineare può avere già una accuratezza sufficiente oppure può essere usata come punto di partenza per la minimizzazione (non lineare) di una funzione di errore nota come bundle adjustment Nota: il processo lineare minimizza un errore di tipo algebrico, mentre il bundle adjustment minimizza un vero errore geometrico.
36 Decomposizione di P in K, R e t La prima sottomatrice 3x3 di P, indicata con M, è il prodotto M = KR di una matrice tringolare superiore e di una rotazione. I. Si fattorizza M in KR usando la decomposizione QR. Così si determinano K e R. II.Quindi Nota: questo produce una matrice con un parametro aggiuntivo s detto skew, legato alla non ortogonalità tra asse ottico e piano immagine concon e l angolo fra gli assi dell immagine
37 Esempio di calibrazione in laboratorio
38 Esempi di calibrazione in esterno Oggetto 3D Oggetto 2D
39 Calibrazione vincolata Esistono in letteratura numerose tecniche di calibrazione che generalizzano il metodo base imponendo vincoli extra oppure migliorandone la robustezza - Coplanarità / collinearità tra punti - Valori noti di alcuni parametri - Gestione di errori sperimentali sui punti 3D - Meccanismi di pesatura - Stabilizzazione numerica - Casi degeneri La scelta del metodo va fatta in base ai requisiti ed al tipo di dati disponibili
40 Trasformazioni proiettive del piano Scegliamo un sistema di coordinate tale che il piano dei punti π abbia coordinata Z nulla. Allora la matrice 3x4 P si riduce a: cioè a una matrice 3x3 che rappresenta la trasformazione di un piano generico della del piano proiettivo.
41 x =Hx, dove H è una matrice 3x3 non singolare omogenea. Questa è la più generale trasformazione proiettiva tra piani Una trasformazione proiettiva tra piani è anche chiamata omografia Ha 8 gradi di libertà (H 33 =1 scelta tipica per la normalizzazione) L applicazione di H ad una immagine permette la rimozione della distorsione prospettica
42 Calcolo numerico di una omografia Dati: n punti corrispondenti Calcolare: H tale che x i = Hx i Ogni corrispondenza fornisce due vincoli e moltiplicando genera due equazioni lineari per gli elementi di H Se (e nemmeno 3 punti sono collineari), allora H è determinata un modo univoco.
43 Date: le coordinate di 4 punti sul piano della scena Trovare: una rettificazione proiettiva del piano Questa rettificazione non richiede alcuna conoscenza dei parametri della telecamera o della orientazione del piano Non è necessario neppure conoscere le coordinate dei 4 punti nel mondo ma solo la loro posizione relativa
44 Un esempio tipico La conoscenza dei punti ABCD nel mondo e sull immagine consente di effettuare misure dirette in unità metriche
45 Rotazioni Sintetiche Le rotazioni sintetiche sono generate mediante deformazione proiettiva dell immagine originale in modo tale che i 4 vertici di un qudrilatero immagine di un rettangolo nel mondo si trasformino in un rettangolo anche sull immagine ruotata
46 Modelli non lineari Il modello pin-hole non vale per TC con distorsione radiale (tipiche nelle TC a basso costo, es. webcam) Per la correzione si usa una trasf.di coordinate del tipo Nella pratica ci si limita di solito al solo termine k 1
47 Correzione della distorsione La distorsione viene corretta imponendo che una o più curve osservate sull immagine siano in realtà segmenti Quindi basta minimizzare in funzione di k 1 l errore di fitting ai minimi quadrati di curve con rette a valle della correzione
48 La minimizzazione avviene con la tecnica dei minimi quadrati totali, essendo l errore sia su x che su y. dato = b ( ax + by + c) = min con a + 1 k1 E( a, b, c k1) i i = i dove le coordinate (x i,y i ) sono funzioni di k 1 La soluzione è quindi lineare in a,b,c e non lineare (per tentativi) in k 1 Disponendo di più curve/rette, l errore totale è una somma pesata degli errori sulla singola curva, quindi la soluzione per k 1 rimane unica
49 Esempi di correzione
50 Applicazione pratica
51 Esercizio n.1 Calibrare la telecamera utilizzando i punti 1-12 Analizzare l errore residuo nei punti utilizzati Generare un oggetto sintetico di altezza nota a partire dai punti
52 Esercizio n.2 Calcolare l omografia tra i punti ABCD ed un rettangolo di dimensioni note Costruire una immagine digitale di tale rettangolo per un pixel size assegnato
Processo di rendering
 Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
CONI, CILINDRI, SUPERFICI DI ROTAZIONE
 CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
15 febbraio 2010 - Soluzione esame di geometria - 12 crediti Ingegneria gestionale - a.a. 2009-2010 COGNOME... NOME... N. MATRICOLA...
 15 febbraio 010 - Soluzione esame di geometria - 1 crediti Ingegneria gestionale - a.a. 009-010 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura
15 febbraio 010 - Soluzione esame di geometria - 1 crediti Ingegneria gestionale - a.a. 009-010 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura
Corso di Visione Artificiale. Stereopsi. Samuel Rota Bulò
 Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
4. Proiezioni del piano e dello spazio
 4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
CORSO DI LAUREA IN INGEGNERIA.
 CORSO DI LAUREA IN INGEGNERIA. FOGLIO DI ESERCIZI 4 GEOMETRIA E ALGEBRA LINEARE 2010/11 Esercizio 4.1 (2.2). Determinare l equazione parametrica e Cartesiana della retta dello spazio (a) Passante per i
CORSO DI LAUREA IN INGEGNERIA. FOGLIO DI ESERCIZI 4 GEOMETRIA E ALGEBRA LINEARE 2010/11 Esercizio 4.1 (2.2). Determinare l equazione parametrica e Cartesiana della retta dello spazio (a) Passante per i
Proiezioni Grafica 3d
 Proiezioni Grafica 3d Giancarlo RINALDO rinaldo@dipmat.unime.it Dipartimento di Matematica Università di Messina ProiezioniGrafica 3d p. 1 Introduzione Il processo di visualizzazione in 3D è intrinsecamente
Proiezioni Grafica 3d Giancarlo RINALDO rinaldo@dipmat.unime.it Dipartimento di Matematica Università di Messina ProiezioniGrafica 3d p. 1 Introduzione Il processo di visualizzazione in 3D è intrinsecamente
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica Terzo Appello del corso di Geometria e Algebra II Parte - Docente F. Flamini, Roma, 7/09/2007 SVOLGIMENTO COMPITO III APPELLO
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica Terzo Appello del corso di Geometria e Algebra II Parte - Docente F. Flamini, Roma, 7/09/2007 SVOLGIMENTO COMPITO III APPELLO
GEOMETRIA DELLE MASSE
 1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Rette e piani con le matrici e i determinanti
 CAPITOLO Rette e piani con le matrici e i determinanti Esercizio.. Stabilire se i punti A(, ), B(, ) e C(, ) sono allineati. Esercizio.. Stabilire se i punti A(,,), B(,,), C(,, ) e D(4,,0) sono complanari.
CAPITOLO Rette e piani con le matrici e i determinanti Esercizio.. Stabilire se i punti A(, ), B(, ) e C(, ) sono allineati. Esercizio.. Stabilire se i punti A(,,), B(,,), C(,, ) e D(4,,0) sono complanari.
RETTE, PIANI, SFERE, CIRCONFERENZE
 RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
Trasformazioni 2D. Grande differenza rispetto alla grafica raster!
 Trasformazioni 2D Il grande vantaggio della grafica vettoriale è che le immagini vettoriali descrivono entità matematiche È immediato manipolare matematicamente tali entità In quasi tutte le manipolazioni
Trasformazioni 2D Il grande vantaggio della grafica vettoriale è che le immagini vettoriali descrivono entità matematiche È immediato manipolare matematicamente tali entità In quasi tutte le manipolazioni
Massimi e minimi vincolati di funzioni in due variabili
 Massimi e minimi vincolati di funzioni in due variabili I risultati principali della teoria dell ottimizzazione, il Teorema di Fermat in due variabili e il Test dell hessiana, si applicano esclusivamente
Massimi e minimi vincolati di funzioni in due variabili I risultati principali della teoria dell ottimizzazione, il Teorema di Fermat in due variabili e il Test dell hessiana, si applicano esclusivamente
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Trasformazioni Geometriche 1 Roberto Petroni, 2011
 1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
1. Sia dato un poliedro. Dire quali delle seguenti affermazioni sono corrette.
 . Sia dato un poliedro. (a) Un vettore x R n è un vertice di P se soddisfa alla seguenti condizioni: x P e comunque presi due punti distinti x, x 2 P tali che x x e x x 2 si ha x = ( β)x + βx 2 con β [0,
. Sia dato un poliedro. (a) Un vettore x R n è un vertice di P se soddisfa alla seguenti condizioni: x P e comunque presi due punti distinti x, x 2 P tali che x x e x x 2 si ha x = ( β)x + βx 2 con β [0,
Sistemi Informativi Territoriali. Map Algebra
 Paolo Mogorovich Sistemi Informativi Territoriali Appunti dalle lezioni Map Algebra Cod.735 - Vers.E57 1 Definizione di Map Algebra 2 Operatori locali 3 Operatori zonali 4 Operatori focali 5 Operatori
Paolo Mogorovich Sistemi Informativi Territoriali Appunti dalle lezioni Map Algebra Cod.735 - Vers.E57 1 Definizione di Map Algebra 2 Operatori locali 3 Operatori zonali 4 Operatori focali 5 Operatori
ELEMENTI DI ALGEBRA LINEARE E GEOMETRIA Corso di Laurea Ingegneria Edile-Architettura
 Cognome Nome Matricola ELEMENTI DI ALGEBRA LINEARE E GEOMETRIA Corso di Laurea Ingegneria Edile-Architettura (Primo appello/ii prova parziale 15/6/15 - Chiarellotto-Urbinati) Per la II prova: solo esercizi
Cognome Nome Matricola ELEMENTI DI ALGEBRA LINEARE E GEOMETRIA Corso di Laurea Ingegneria Edile-Architettura (Primo appello/ii prova parziale 15/6/15 - Chiarellotto-Urbinati) Per la II prova: solo esercizi
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
8 - Analisi della deformazione
 8 - Analisi della deformazione ü [A.a. - : ultima revisione 6 ottobre ] Esercizio n. Si supponga di voler conoscere sperimentalmente lo stato di deformazione in un punto M di un solido. A tal fine, si
8 - Analisi della deformazione ü [A.a. - : ultima revisione 6 ottobre ] Esercizio n. Si supponga di voler conoscere sperimentalmente lo stato di deformazione in un punto M di un solido. A tal fine, si
Parte 3. Rango e teorema di Rouché-Capelli
 Parte 3. Rango e teorema di Rouché-Capelli A. Savo Appunti del Corso di Geometria 203-4 Indice delle sezioni Rango di una matrice, 2 Teorema degli orlati, 3 3 Calcolo con l algoritmo di Gauss, 6 4 Matrici
Parte 3. Rango e teorema di Rouché-Capelli A. Savo Appunti del Corso di Geometria 203-4 Indice delle sezioni Rango di una matrice, 2 Teorema degli orlati, 3 3 Calcolo con l algoritmo di Gauss, 6 4 Matrici
Ottimizzazione Multi Obiettivo
 Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
Ottimizzazione Multi Obiettivo 1 Ottimizzazione Multi Obiettivo I problemi affrontati fino ad ora erano caratterizzati da una unica (e ben definita) funzione obiettivo. I problemi di ottimizzazione reali
CONTINUITÀ E DERIVABILITÀ Esercizi proposti. 1. Determinare lim M(sinx) (M(t) denota la mantissa di t)
 (M(t) denota la mantissa di t)") CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
Processo di rendering
 Processo di rendering 1 Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione I parametri della vista 3D I sistemi di coordinate 2 I parametri
Processo di rendering 1 Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione I parametri della vista 3D I sistemi di coordinate 2 I parametri
Parte 2. Determinante e matrice inversa
 Parte. Determinante e matrice inversa A. Savo Appunti del Corso di Geometria 013-14 Indice delle sezioni 1 Determinante di una matrice, 1 Teorema di Cramer (caso particolare), 3 3 Determinante di una matrice
Parte. Determinante e matrice inversa A. Savo Appunti del Corso di Geometria 013-14 Indice delle sezioni 1 Determinante di una matrice, 1 Teorema di Cramer (caso particolare), 3 3 Determinante di una matrice
Esempio. Approssimazione con il criterio dei minimi quadrati. Esempio. Esempio. Risultati sperimentali. Interpolazione con spline cubica.
 Esempio Risultati sperimentali Approssimazione con il criterio dei minimi quadrati Esempio Interpolazione con spline cubica. Esempio 1 Come procedere? La natura del fenomeno suggerisce che una buona approssimazione
Esempio Risultati sperimentali Approssimazione con il criterio dei minimi quadrati Esempio Interpolazione con spline cubica. Esempio 1 Come procedere? La natura del fenomeno suggerisce che una buona approssimazione
Rette e curve, piani e superfici
 Rette e curve piani e superfici ) dicembre 2 Scopo di questo articolo è solo quello di proporre uno schema riepilogativo che metta in luce le caratteristiche essenziali delle equazioni di rette e curve
Rette e curve piani e superfici ) dicembre 2 Scopo di questo articolo è solo quello di proporre uno schema riepilogativo che metta in luce le caratteristiche essenziali delle equazioni di rette e curve
allora la retta di equazione x=c è asintoto (verticale) della funzione
 della funzione") 1)Cosa rappresenta il seguente limite e quale ne è il valore? E il limite del rapporto incrementale della funzione f(x)= con punto iniziale, al tendere a 0 dell incremento h. Il valore del limite può essere
1)Cosa rappresenta il seguente limite e quale ne è il valore? E il limite del rapporto incrementale della funzione f(x)= con punto iniziale, al tendere a 0 dell incremento h. Il valore del limite può essere
Coordinate 3D. Coordinate cartesiane. Coordinate 3D. Coordinate cartesiane. Coordinate cartesiane. Sinistrorsa. Destrorsa
 200 Coordinate D Anche nella grafica D gli oggetti da visualiare vengono codificati a partire da primitive che collegano punti. I punti appartengono ad uno spaio tridimensionale. Vengono memoriati utiliando
200 Coordinate D Anche nella grafica D gli oggetti da visualiare vengono codificati a partire da primitive che collegano punti. I punti appartengono ad uno spaio tridimensionale. Vengono memoriati utiliando
1 Applicazioni Lineari tra Spazi Vettoriali
 1 Applicazioni Lineari tra Spazi Vettoriali Definizione 1 (Applicazioni lineari) Si chiama applicazione lineare una applicazione tra uno spazio vettoriale ed uno spazio vettoriale sul campo tale che "!$%!
1 Applicazioni Lineari tra Spazi Vettoriali Definizione 1 (Applicazioni lineari) Si chiama applicazione lineare una applicazione tra uno spazio vettoriale ed uno spazio vettoriale sul campo tale che "!$%!
PROVA INVALSI Scuola Secondaria di I grado Classe Prima
 SNV 2010-2011; SNV 2011-2012; SNV 2012-2013 SPAZIO E FIGURE SNV 2011 10 quesiti su 29 (12 item di cui 6 a risposta aperta) SNV 2012 11 quesiti su 30 (13 item di cui 2 a risposta aperta) SNV 2013 9 quesiti
SNV 2010-2011; SNV 2011-2012; SNV 2012-2013 SPAZIO E FIGURE SNV 2011 10 quesiti su 29 (12 item di cui 6 a risposta aperta) SNV 2012 11 quesiti su 30 (13 item di cui 2 a risposta aperta) SNV 2013 9 quesiti
Forze come grandezze vettoriali
 Forze come grandezze vettoriali L. Paolucci 23 novembre 2010 Sommario Esercizi e problemi risolti. Per la classe prima. Anno Scolastico 2010/11 Parte 1 / versione 2 Si ricordi che la risultante di due
Forze come grandezze vettoriali L. Paolucci 23 novembre 2010 Sommario Esercizi e problemi risolti. Per la classe prima. Anno Scolastico 2010/11 Parte 1 / versione 2 Si ricordi che la risultante di due
ELEMENTI DI GEOMETRIA ANALITICA: LA RETTA.
 ELEMENTI DI GEOMETRIA ANALITICA: LA RETTA. Prerequisiti I radicali Risoluzione di sistemi di equazioni di primo e secondo grado. Classificazione e dominio delle funzioni algebriche Obiettivi minimi Saper
ELEMENTI DI GEOMETRIA ANALITICA: LA RETTA. Prerequisiti I radicali Risoluzione di sistemi di equazioni di primo e secondo grado. Classificazione e dominio delle funzioni algebriche Obiettivi minimi Saper
Sia data la rete di fig. 1 costituita da tre resistori,,, e da due generatori indipendenti ideali di corrente ed. Fig. 1
 Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
LE TRASFORMAZIONI GEOMETRICHE NEL PIANO
 LE TRASFORMAZIONI GEOMETRICHE NEL PIANO Una trasformazione geometrica è una funzione che fa corrispondere a ogni punto del piano un altro punto del piano stesso Si può pensare come MOVIMENTO di punti e
LE TRASFORMAZIONI GEOMETRICHE NEL PIANO Una trasformazione geometrica è una funzione che fa corrispondere a ogni punto del piano un altro punto del piano stesso Si può pensare come MOVIMENTO di punti e
4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI
 119 4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI Indice degli Argomenti: TEMA N. 1 : INSIEMI NUMERICI E CALCOLO
119 4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI Indice degli Argomenti: TEMA N. 1 : INSIEMI NUMERICI E CALCOLO
Federico Lastaria. Analisi e Geometria 2. Matrici simmetriche. Il teorema spettrale. 1/24
 Contenuto Endomorfismi auto-aggiunti. Matrici simmetriche. Il teorema spettrale Gli autovalori di una matrice simmetrica sono tutti reali. (Dimostrazione fatta usando i numeri complessi). Dimostrazione
Contenuto Endomorfismi auto-aggiunti. Matrici simmetriche. Il teorema spettrale Gli autovalori di una matrice simmetrica sono tutti reali. (Dimostrazione fatta usando i numeri complessi). Dimostrazione
Andrea Pagano, Laura Tedeschini Lalli
 3.5 Il toro 3.5.1 Modelli di toro Modelli di carta Esempio 3.5.1 Toro 1 Il modello di toro finito che ciascuno può costruire è ottenuto incollando a due a due i lati opposti di un foglio rettangolare.
3.5 Il toro 3.5.1 Modelli di toro Modelli di carta Esempio 3.5.1 Toro 1 Il modello di toro finito che ciascuno può costruire è ottenuto incollando a due a due i lati opposti di un foglio rettangolare.
Slide Cerbara parte1 5. Le distribuzioni teoriche
 Slide Cerbara parte1 5 Le distribuzioni teoriche I fenomeni biologici, demografici, sociali ed economici, che sono il principale oggetto della statistica, non sono retti da leggi matematiche. Però dalle
Slide Cerbara parte1 5 Le distribuzioni teoriche I fenomeni biologici, demografici, sociali ed economici, che sono il principale oggetto della statistica, non sono retti da leggi matematiche. Però dalle
2 Argomenti introduttivi e generali
 1 Note Oltre agli esercizi di questa lista si consiglia di svolgere quelli segnalati o assegnati sul registro e genericamente quelli presentati dal libro come esercizio o come esempio sugli argomenti svolti
1 Note Oltre agli esercizi di questa lista si consiglia di svolgere quelli segnalati o assegnati sul registro e genericamente quelli presentati dal libro come esercizio o come esempio sugli argomenti svolti
Pitagora preso in giro (tondo).
.") Pitagora preso in giro (tondo). Silvano Rossetto Centro Ricerche Didattiche Ugo Morin Se si chiede di completare la frase il teorema di, sicuramente Pitagora ottiene una percentuale bulgara: il suo è quindi
Pitagora preso in giro (tondo). Silvano Rossetto Centro Ricerche Didattiche Ugo Morin Se si chiede di completare la frase il teorema di, sicuramente Pitagora ottiene una percentuale bulgara: il suo è quindi
SCHEDA M MOSAICI CLASSIFICARE CON LA SIMMETRIA
 SCHEDA M MOSAICI CLASSIFICARE CON LA SIMMETRIA Qui sotto avete una griglia, che rappresenta una normale quadrettatura, come quella dei quaderni a quadretti; nelle attività che seguono dovrete immaginare
SCHEDA M MOSAICI CLASSIFICARE CON LA SIMMETRIA Qui sotto avete una griglia, che rappresenta una normale quadrettatura, come quella dei quaderni a quadretti; nelle attività che seguono dovrete immaginare
PROBLEMI DI MASSIMO E MINIMO ESEMPI INTRODUTTIVI ELEMENTARI. PROBLEMA 1: Tra i rettangoli di perimetro 20 cm, determina quello di area massima.
 PROBLEMI DI MASSIMO E MINIMO ESEMPI INTRODUTTIVI ELEMENTARI Introduzione Vengono qui presentati alcuni semplici problemi di massimo e minimo. Leggi con attenzione e completa i passaggi mancanti. Prova
PROBLEMI DI MASSIMO E MINIMO ESEMPI INTRODUTTIVI ELEMENTARI Introduzione Vengono qui presentati alcuni semplici problemi di massimo e minimo. Leggi con attenzione e completa i passaggi mancanti. Prova
VC-dimension: Esempio
 VC-dimension: Esempio Quale è la VC-dimension di. y b = 0 f() = 1 f() = 1 iperpiano 20? VC-dimension: Esempio Quale è la VC-dimension di? banale. Vediamo cosa succede con 2 punti: 21 VC-dimension: Esempio
VC-dimension: Esempio Quale è la VC-dimension di. y b = 0 f() = 1 f() = 1 iperpiano 20? VC-dimension: Esempio Quale è la VC-dimension di? banale. Vediamo cosa succede con 2 punti: 21 VC-dimension: Esempio
Parte 6. Applicazioni lineari
 Parte 6 Applicazioni lineari A Savo Appunti del Corso di Geometria 203-4 Indice delle sezioni Applicazioni fra insiemi, 2 Applicazioni lineari tra spazi vettoriali, 2 3 Applicazioni lineari da R n a R
Parte 6 Applicazioni lineari A Savo Appunti del Corso di Geometria 203-4 Indice delle sezioni Applicazioni fra insiemi, 2 Applicazioni lineari tra spazi vettoriali, 2 3 Applicazioni lineari da R n a R
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calcolo delle corrispondenze Affrontiamo il problema centrale della visione stereo, cioè la ricerca automatica di punti corrispondenti tra immagini Chiamiamo
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calcolo delle corrispondenze Affrontiamo il problema centrale della visione stereo, cioè la ricerca automatica di punti corrispondenti tra immagini Chiamiamo
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare
 L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
Algebra Lineare e Geometria
 Algebra Lineare e Geometria Corso di Laurea in Ingegneria Elettronica A.A. 2013-2014 Prova d esame del 16/06/2014. 1) a) Determinare la matrice associata all applicazione lineare T : R 3 R 4 definita da
Algebra Lineare e Geometria Corso di Laurea in Ingegneria Elettronica A.A. 2013-2014 Prova d esame del 16/06/2014. 1) a) Determinare la matrice associata all applicazione lineare T : R 3 R 4 definita da
IGiochidiArchimede-SoluzioniBiennio 22 novembre 2006
 PROGETTO OLIMPII I MTEMTI U.M.I. UNIONE MTEMTI ITLIN SUOL NORMLE SUPERIORE IGiochidirchimede-Soluzioniiennio novembre 006 Griglia delle risposte corrette Problema Risposta corretta E 4 5 6 7 8 9 E 0 Problema
PROGETTO OLIMPII I MTEMTI U.M.I. UNIONE MTEMTI ITLIN SUOL NORMLE SUPERIORE IGiochidirchimede-Soluzioniiennio novembre 006 Griglia delle risposte corrette Problema Risposta corretta E 4 5 6 7 8 9 E 0 Problema
Esercizi svolti sui numeri complessi
 Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI
 FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
LA GEOMETRIA ANALITICA DELLO SPAZIO. Liceo G. GALILEI - Verona Venerdì 10 Aprile 2015 CONVEGNO MATHESIS VERONA
 LA GEOMETRIA ANALITICA DELLO SPAZIO CONVEGNO MATHESIS Liceo G. GALILEI - Verona Venerdì 10 Aprile 2015 Perché Assenza di ogni riferimento alla geometria analitica dello spazio nel quadri di Mondrian La
LA GEOMETRIA ANALITICA DELLO SPAZIO CONVEGNO MATHESIS Liceo G. GALILEI - Verona Venerdì 10 Aprile 2015 Perché Assenza di ogni riferimento alla geometria analitica dello spazio nel quadri di Mondrian La
min 4x 1 +x 2 +x 3 2x 1 +x 2 +2x 3 = 4 3x 1 +3x 2 +x 3 = 3 x 1 +x 2 3x 3 = 5 Innanzitutto scriviamo il problema in forma standard: x 1 x 2 +3x 3 = 5
 IL METODO DEL SIMPLESSO 65 Esercizio 7.4.4 Risolvere utilizzando il metodo del simplesso il seguente problema di PL: min 4 + + + + = 4 + + = + = 5 Innanzitutto scriviamo il problema in forma standard:
IL METODO DEL SIMPLESSO 65 Esercizio 7.4.4 Risolvere utilizzando il metodo del simplesso il seguente problema di PL: min 4 + + + + = 4 + + = + = 5 Innanzitutto scriviamo il problema in forma standard:
2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1
![2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1](/thumbs/25/5899888.jpg "2 + (σ2 - ρσ 1 ) 2 > 0 [da -1 ρ 1] b = (σ 2. 2 - ρσ1 σ 2 ) = (σ 1") 1 PORTAFOGLIO Portafoglio Markowitz (2 titoli) (rischiosi) due titoli rendimento/varianza ( μ 1, σ 1 ), ( μ 2, σ 2 ) Si suppone μ 1 > μ 2, σ 1 > σ 2 portafoglio con pesi w 1, w 2 w 1 = w, w 2 = 1- w 1
1 PORTAFOGLIO Portafoglio Markowitz (2 titoli) (rischiosi) due titoli rendimento/varianza ( μ 1, σ 1 ), ( μ 2, σ 2 ) Si suppone μ 1 > μ 2, σ 1 > σ 2 portafoglio con pesi w 1, w 2 w 1 = w, w 2 = 1- w 1
Introduzione al MATLAB c Parte 2
 Introduzione al MATLAB c Parte 2 Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 18 gennaio 2008 Outline 1 M-file di tipo Script e Function Script Function 2 Costrutti di programmazione
Introduzione al MATLAB c Parte 2 Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 18 gennaio 2008 Outline 1 M-file di tipo Script e Function Script Function 2 Costrutti di programmazione
Analisi Matematica di circuiti elettrici
 Analisi Matematica di circuiti elettrici Eserciziario A cura del Prof. Marco Chirizzi 2011/2012 Cap.5 Numeri complessi 5.1 Definizione di numero complesso Si definisce numero complesso un numero scritto
Analisi Matematica di circuiti elettrici Eserciziario A cura del Prof. Marco Chirizzi 2011/2012 Cap.5 Numeri complessi 5.1 Definizione di numero complesso Si definisce numero complesso un numero scritto
Tecniche di analisi multivariata
 Tecniche di analisi multivariata Metodi che fanno riferimento ad un modello distributivo assunto per le osservazioni e alla base degli sviluppi inferenziali - tecniche collegate allo studio della dipendenza
Tecniche di analisi multivariata Metodi che fanno riferimento ad un modello distributivo assunto per le osservazioni e alla base degli sviluppi inferenziali - tecniche collegate allo studio della dipendenza
ISTITUTO COMPRENSIVO MONTEGROTTO TERME SCUOLA PRIMARIA DISCIPLINA: MATEMATICA - CLASSE PRIMA OBIETTIVI DI APPRENDIMENTO
 PRIMA DELLA DISCIPLINA: MATEMATICA - CLASSE PRIMA L alunno si muove con sicurezza nel calcolo scritto e mentale con i numeri naturali. Legge e comprende testi che coinvolgono aspetti logici e matematici.
PRIMA DELLA DISCIPLINA: MATEMATICA - CLASSE PRIMA L alunno si muove con sicurezza nel calcolo scritto e mentale con i numeri naturali. Legge e comprende testi che coinvolgono aspetti logici e matematici.
Osservazioni sulla prima prova intermedia
 Avviso Istituzioni di matematiche 2 Diego Noja (diego.noja@unimib.it) 28 aprile 2009 La seconda prova intermedia si svolgerà martedì 26 maggio 2008, dalle 16.30 alle 18.30 Cognomi dalla A alla L: aula
Avviso Istituzioni di matematiche 2 Diego Noja (diego.noja@unimib.it) 28 aprile 2009 La seconda prova intermedia si svolgerà martedì 26 maggio 2008, dalle 16.30 alle 18.30 Cognomi dalla A alla L: aula
MINIMI QUADRATI. REGRESSIONE LINEARE
 MINIMI QUADRATI. REGRESSIONE LINEARE Se il coefficiente di correlazione r è prossimo a 1 o a -1 e se il diagramma di dispersione suggerisce una relazione di tipo lineare, ha senso determinare l equazione
MINIMI QUADRATI. REGRESSIONE LINEARE Se il coefficiente di correlazione r è prossimo a 1 o a -1 e se il diagramma di dispersione suggerisce una relazione di tipo lineare, ha senso determinare l equazione
Lezione 9: Cambio di base
 Lezione 9: Cambio di base In questa lezione vogliamo affrontare uno degli argomenti piu ostici per lo studente e cioè il cambio di base all interno di uno spazio vettoriale, inoltre cercheremo di capire
Lezione 9: Cambio di base In questa lezione vogliamo affrontare uno degli argomenti piu ostici per lo studente e cioè il cambio di base all interno di uno spazio vettoriale, inoltre cercheremo di capire
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
APPUNTI DI MATEMATICA GEOMETRIA \ GEOMETRIA EUCLIDEA \ GEOMETRIA DEL PIANO (1)
") GEOMETRIA \ GEOMETRIA EUCLIDEA \ GEOMETRIA DEL PIANO (1) Un ente (geometrico) è un oggetto studiato dalla geometria. Per descrivere gli enti vengono utilizzate delle definizioni. Una definizione è una
GEOMETRIA \ GEOMETRIA EUCLIDEA \ GEOMETRIA DEL PIANO (1) Un ente (geometrico) è un oggetto studiato dalla geometria. Per descrivere gli enti vengono utilizzate delle definizioni. Una definizione è una
13. Campi vettoriali
 13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine
 Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine di Philip Cheng Per molti anni la camera a pellicola aerotrasportata è stata la miglior scelta per l acquisizione di foto
Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine di Philip Cheng Per molti anni la camera a pellicola aerotrasportata è stata la miglior scelta per l acquisizione di foto
Diagonalizzazione di matrici e applicazioni lineari
 CAPITOLO 9 Diagonalizzazione di matrici e applicazioni lineari Esercizio 9.1. Verificare che v = (1, 0, 0, 1) è autovettore dell applicazione lineare T così definita T(x 1,x 2,x 3,x 4 ) = (2x 1 2x 3, x
CAPITOLO 9 Diagonalizzazione di matrici e applicazioni lineari Esercizio 9.1. Verificare che v = (1, 0, 0, 1) è autovettore dell applicazione lineare T così definita T(x 1,x 2,x 3,x 4 ) = (2x 1 2x 3, x
La distribuzione Normale. La distribuzione Normale
 La Distribuzione Normale o Gaussiana è la distribuzione più importante ed utilizzata in tutta la statistica La curva delle frequenze della distribuzione Normale ha una forma caratteristica, simile ad una
La Distribuzione Normale o Gaussiana è la distribuzione più importante ed utilizzata in tutta la statistica La curva delle frequenze della distribuzione Normale ha una forma caratteristica, simile ad una
Capitolo 13: L offerta dell impresa e il surplus del produttore
 Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
A.1 Definizione e rappresentazione di un numero complesso
 441 APPENDICE A4 NUMERI COMPLESSI A.1 Definizione e rappresentazione di un numero complesso Si riepilogano i concetti e le operazioni elementari relativi ai numeri complessi. Sia z un numero complesso;
441 APPENDICE A4 NUMERI COMPLESSI A.1 Definizione e rappresentazione di un numero complesso Si riepilogano i concetti e le operazioni elementari relativi ai numeri complessi. Sia z un numero complesso;
Metodi Computazionali
 Metodi Computazionali Elisabetta Fersini fersini@disco.unimib.it A.A. 2009/2010 Catene di Markov Applicazioni: Fisica dinamica dei sistemi Web simulazione del comportamento utente Biologia evoluzione delle
Metodi Computazionali Elisabetta Fersini fersini@disco.unimib.it A.A. 2009/2010 Catene di Markov Applicazioni: Fisica dinamica dei sistemi Web simulazione del comportamento utente Biologia evoluzione delle
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
TRASFORMAZIONI GEOMETRICHE NEL PIANO. Parte 1
 TRASFORMAZIONI GEOMETRICHE NEL PIANO Parte 1 La geometria è la scienza che studia la forma e l estensione dei corpi e le trasformazioni che questi possono subire. In generale per trasformazione geometrica
TRASFORMAZIONI GEOMETRICHE NEL PIANO Parte 1 La geometria è la scienza che studia la forma e l estensione dei corpi e le trasformazioni che questi possono subire. In generale per trasformazione geometrica
a) Il campo di esistenza di f(x) è dato da 2x 0, ovvero x 0. Il grafico di f(x) è quello di una iperbole -1 1
 Il campo di esistenza di f(x) è dato da 2x 0, ovvero x 0. Il grafico di f(x) è quello di una iperbole -1 1") LE FUNZIONI EALI DI VAIABILE EALE Soluzioni di quesiti e problemi estratti dal Corso Base Blu di Matematica volume 5 Q[] Sono date le due funzioni: ) = e g() = - se - se = - Determina il campo di esistenza
LE FUNZIONI EALI DI VAIABILE EALE Soluzioni di quesiti e problemi estratti dal Corso Base Blu di Matematica volume 5 Q[] Sono date le due funzioni: ) = e g() = - se - se = - Determina il campo di esistenza
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Un prototipo di 3D scanner
 Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
TRAVE SU SUOLO ELASTICO
 Capitolo 3 TRAVE SU SUOLO ELASTICO (3.1) Combinando la (3.1) con la (3.2) si ottiene: (3.2) L equazione differenziale può essere così riscritta: (3.3) La soluzione dell equazione differenziale di ordine
Capitolo 3 TRAVE SU SUOLO ELASTICO (3.1) Combinando la (3.1) con la (3.2) si ottiene: (3.2) L equazione differenziale può essere così riscritta: (3.3) La soluzione dell equazione differenziale di ordine
Matematica generale CTF
 Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
DISEGNO TECNICO INDUSTRIALE
 DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
SVM. Veronica Piccialli. Roma 11 gennaio 2010. Università degli Studi di Roma Tor Vergata 1 / 14
 SVM Veronica Piccialli Roma 11 gennaio 2010 Università degli Studi di Roma Tor Vergata 1 / 14 SVM Le Support Vector Machines (SVM) sono una classe di macchine di che derivano da concetti riguardanti la
SVM Veronica Piccialli Roma 11 gennaio 2010 Università degli Studi di Roma Tor Vergata 1 / 14 SVM Le Support Vector Machines (SVM) sono una classe di macchine di che derivano da concetti riguardanti la
RICHIAMI SULLE MATRICI. Una matrice di m righe e n colonne è rappresentata come
 RICHIAMI SULLE MATRICI Una matrice di m righe e n colonne è rappresentata come A = a 11 a 12... a 1n a 21 a 22... a 2n............ a m1 a m2... a mn dove m ed n sono le dimensioni di A. La matrice A può
RICHIAMI SULLE MATRICI Una matrice di m righe e n colonne è rappresentata come A = a 11 a 12... a 1n a 21 a 22... a 2n............ a m1 a m2... a mn dove m ed n sono le dimensioni di A. La matrice A può
APPLICAZIONI LINEARI
 APPLICAZIONI LINEARI 1. Esercizi Esercizio 1. Date le seguenti applicazioni lineari (1) f : R 2 R 3 definita da f(x, y) = (x 2y, x + y, x + y); (2) g : R 3 R 2 definita da g(x, y, z) = (x + y, x y); (3)
APPLICAZIONI LINEARI 1. Esercizi Esercizio 1. Date le seguenti applicazioni lineari (1) f : R 2 R 3 definita da f(x, y) = (x 2y, x + y, x + y); (2) g : R 3 R 2 definita da g(x, y, z) = (x + y, x y); (3)
Domande a scelta multipla 1
 Domande a scelta multipla Domande a scelta multipla 1 Rispondete alle domande seguenti, scegliendo tra le alternative proposte. Cercate di consultare i suggerimenti solo in caso di difficoltà. Dopo l elenco
Domande a scelta multipla Domande a scelta multipla 1 Rispondete alle domande seguenti, scegliendo tra le alternative proposte. Cercate di consultare i suggerimenti solo in caso di difficoltà. Dopo l elenco
Capitolo 25: Lo scambio nel mercato delle assicurazioni
 Capitolo 25: Lo scambio nel mercato delle assicurazioni 25.1: Introduzione In questo capitolo la teoria economica discussa nei capitoli 23 e 24 viene applicata all analisi dello scambio del rischio nel
Capitolo 25: Lo scambio nel mercato delle assicurazioni 25.1: Introduzione In questo capitolo la teoria economica discussa nei capitoli 23 e 24 viene applicata all analisi dello scambio del rischio nel
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
Capitolo 4: Ottimizzazione non lineare non vincolata parte II. E. Amaldi DEIB, Politecnico di Milano
 Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Capitolo 4: Ottimizzazione non lineare non vincolata parte II E. Amaldi DEIB, Politecnico di Milano 4.3 Algoritmi iterativi e convergenza Programma non lineare (PNL): min f(x) s.v. g i (x) 0 1 i m x S
Ricostruzione stereo. Il nostro obiettivo. Ricostruzione del Cenacolo Vinciano. Ricostruire la profondità. d Y
 Il nostro obiettivo Daniele Marini Ricostruzione stereo Ricostruire scenari 3D da più immagini per inserire oggetti di sintesi Ricostruire la profondità Ricostruzione del Cenacolo Vinciano Solo se abbiamo
Il nostro obiettivo Daniele Marini Ricostruzione stereo Ricostruire scenari 3D da più immagini per inserire oggetti di sintesi Ricostruire la profondità Ricostruzione del Cenacolo Vinciano Solo se abbiamo
LA GRAFICA E LA GEOMETRIA OPERATIVA
 LA GRAFICA E LA GEOMETRIA OPERATIVA La geometria operativa, contrariamente a quella descrittiva basata sulle regole per la rappresentazione delle forme geometriche, prende in considerazione lo spazio racchiuso
LA GRAFICA E LA GEOMETRIA OPERATIVA La geometria operativa, contrariamente a quella descrittiva basata sulle regole per la rappresentazione delle forme geometriche, prende in considerazione lo spazio racchiuso
Misure di base su una carta. Calcoli di distanze
 Misure di base su una carta Calcoli di distanze Per calcolare la distanza tra due punti su una carta disegnata si opera nel modo seguente: 1. Occorre identificare la scala della carta o ricorrendo alle
Misure di base su una carta Calcoli di distanze Per calcolare la distanza tra due punti su una carta disegnata si opera nel modo seguente: 1. Occorre identificare la scala della carta o ricorrendo alle
Metodologia per l analisi dei dati sperimentali L analisi di studi con variabili di risposta multiple: Regressione multipla
 Il metodo della regressione può essere esteso dal caso in cui si considera la variabilità della risposta della y in relazione ad una sola variabile indipendente X ad una situazione più generale in cui
Il metodo della regressione può essere esteso dal caso in cui si considera la variabilità della risposta della y in relazione ad una sola variabile indipendente X ad una situazione più generale in cui
FOGLIO 6 - Esercizi Riepilogativi Svolti. Nei seguenti esercizi, si consideri fissato una volta per tutte un riferimento proiettivo per
 Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Edile/Architettura Esercizi per il corso di GEOMETRIA 2 - aa 2007/2008 Docente: Prof F Flamini - Tutore: Dott M Paganin FOGLIO 6 - Esercizi
Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Edile/Architettura Esercizi per il corso di GEOMETRIA 2 - aa 2007/2008 Docente: Prof F Flamini - Tutore: Dott M Paganin FOGLIO 6 - Esercizi
La Programmazione Lineare
 4 La Programmazione Lineare 4.1 INTERPRETAZIONE GEOMETRICA DI UN PROBLEMA DI PROGRAMMAZIONE LINEARE Esercizio 4.1.1 Fornire una rappresentazione geometrica e risolvere graficamente i seguenti problemi
4 La Programmazione Lineare 4.1 INTERPRETAZIONE GEOMETRICA DI UN PROBLEMA DI PROGRAMMAZIONE LINEARE Esercizio 4.1.1 Fornire una rappresentazione geometrica e risolvere graficamente i seguenti problemi
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
DOMINIO E LIMITI. Esercizio 3 Studiare gli insiemi di livello della funzione f, nei seguenti casi: 1) f(x,y) = y2 x 2 + y 2.
 f(x,y) = y2 x 2 + y 2.") FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di