La robotica terrestre
|
|
|
- Serafino Di Pietro
- 8 anni fa
- Visualizzazioni
Transcript
1 Applicazioni e tecnologie dei sistemi robotici intelligenti - 23 settembre 2004 La robotica terrestre Sergio Taraglio FUS-ROB ENEA - C.R. Casaccia 1

2 Sommario Cos è un robot Esempi di robot Cosa si trova in giro per il mondo Come funziona un robot (terrestre e non) Applicazioni di visione per la robotica terrestre 2

3 Cos è un robot Per costruire un robot occorrono le conoscenze e la pratica di tante altre scienze, meccanica, informatica, intelligenza artificiale, neuroscienze, psicologia, logica, linguistica, matematica, biologia, fisiologia, e anche, più indirettamente, filosofia, etica, arti espressive, design In un certo senso, un robot è una piattaforma comune di lavoro per esperimenti delle scienze della natura e della scienze umane. In fondo, è una macchina sofisticata dotata di intelligenza e costituisce pertanto il terreno ideale di incontro fra le due culture, quella umanistica e quella tecnico-scientifica. (Scuola di Robotica Genova) 3

4 Cos è un robot Robotica definita come scienza che studia la connessione intelligente tra percezione e azione Robotica industriale progettazione, governo e applicazioni dei robot in ambito industriale tecnologia matura Robotica avanzata spiccate caratteristiche di autonomia applicazioni in ambiente ostile (spaziale, sottomarino, nucleare, militare,...) missioni di servizio (applicazioni domestiche, assistenza medica, assistenza ai disabili, agricoltura,...). ancora in età infantile (Siciliano Lezioni di Robotica industriale) Principale differenza: la quantità di intelligenza necessaria a bordo 4
 missioni di servizio (applicazioni domestiche, assistenza medica, assistenza ai disabili, agricoltura,...). ancora in età infantile (Siciliano Lezioni di Robotica industriale) Principale differenza: la quantità di intelligenza necessaria a bordo 4")
5 Cos è un robot Riassumendo: Robot è un termine abbastanza impreciso (vago) o meglio è un concetto generale La Robotica è una scienza interdisciplinare Sistema elettro-meccanico che compie un lavoro ripetitivo, pericoloso o che implichi una precisione molto elevata Non so dire cosa sia un robot, ma certamente so dire quando ne vedo uno Joseph F. Engelberger, President, Unimation Inc. 5

6 Robotica terrestre Una suddivisione possibile per la robotica autonoma può essere fatta sulla base dell ambiente: Terrestre Marino Aereo Spaziale (Viaggio allucinante, I. Asimov) 6

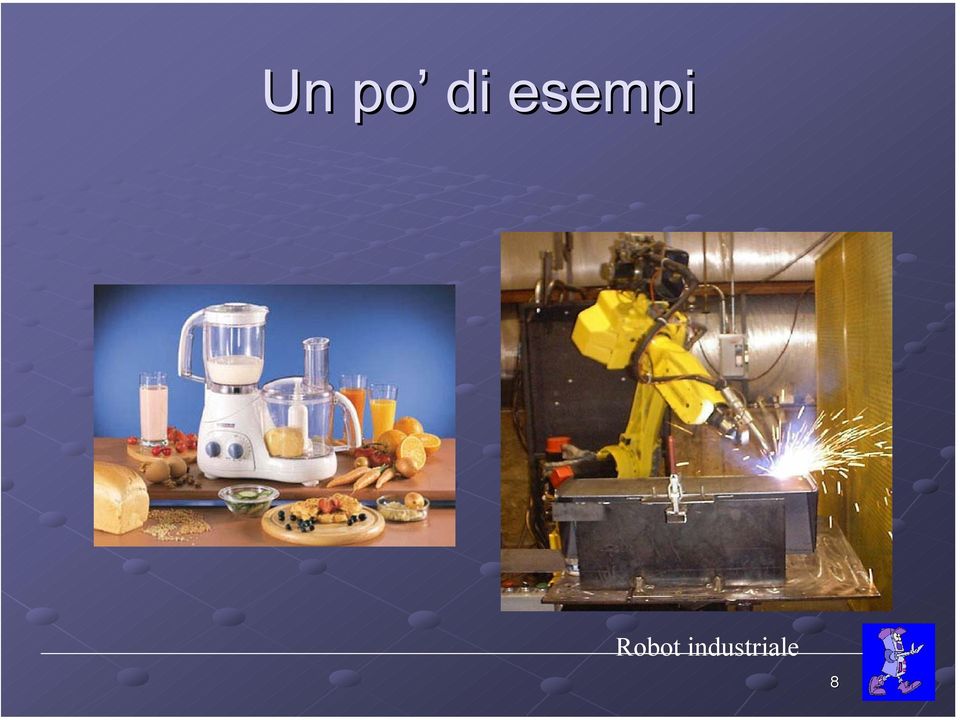
7 Un po di esempi 7

8 Un po di esempi Robot industriale 8
9 Un po di esempi PRASSI: robot di sorveglianza per esterni RAS. Robot Antartico di Superficie 9

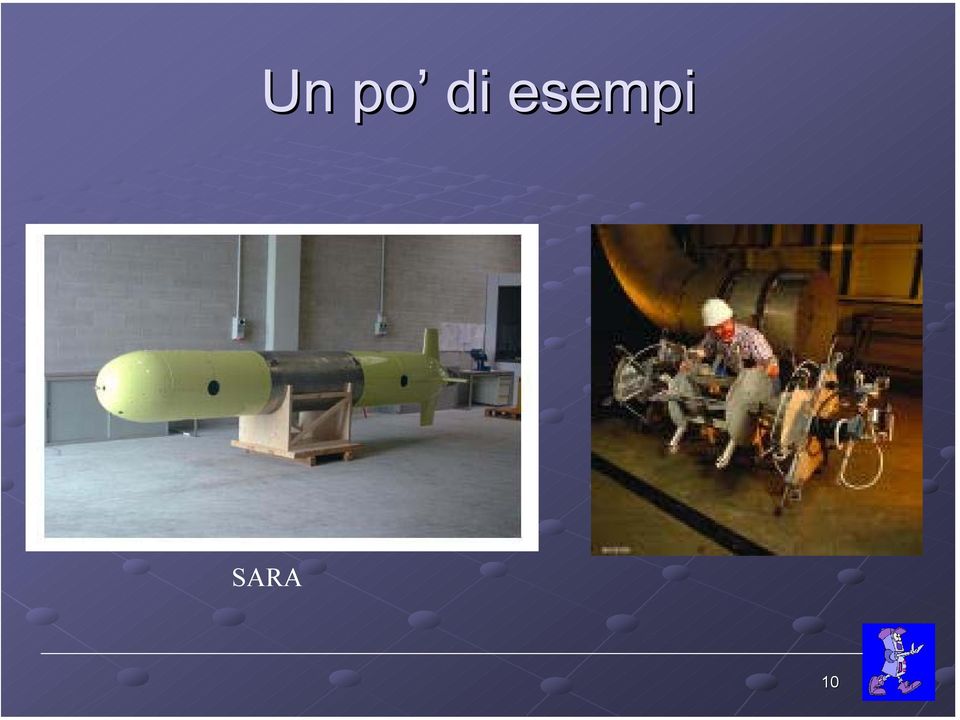
10 Un po di esempi SARA 10
11 Un po di esempi 11

12 Un po di esempi 12

13 Un po di esempi 13

14 Cosa c è in giro Applicazioni militari Space Naval Warfare System S. Diego 14

15 Cosa c è in giro irobot 15

16 Cosa c è in giro Carnegie Mellon University (Pittsburg,, PA) 16

17 Cosa c è in giro M.I.T.(Boston, MA): Pet robot Sedia a rotelle Rover marziano Leg robots Robot antropomorfo 17

18 Cosa c è in giro Kismet: Questioni aperte (dal sito MIT): Self identity Theory of mind Autobiographical memory Recognition of self, other, and conspecifics Social learning (especially( imitation) Intentionality Emotion Empathy Personality Friendship Ethics And that's all we have to say for the moment. What, you were expecting... answers? 18

19 Il robot terrestre quadratico medio Un robot (autonomo) terrestre deve: Misurare l ambiente (sensoristica) Farsi un idea dell ambiente (modellistica) Decidere cosa e come fare (pianificazione) Metterlo in pratica (attuazione) Controllare lo stato del sistema (supervisione) 19
 Controllare lo stato del sistema")
20 Sensoristica 20

21 Attuazione Motori Ruote, gambe, miste Bracci meccanici Controllo di segnali Etc Wheeleg - Università di Catania 21
22 Architetture di calcolo La sensoristica a bordo è una delle variabili che governano le architetture di calcolo (HW e SW) 2 x TV su pan-tilt GPS 12 US Polaroid laser range finder odometria 22
23 Visione artificiale
24 Visione artificiale: estensioni del concetto Sensore omnidirezionale 24
25 Applicazioni di visione artificiale alla robotica terrestre Riconoscimento di marker artificiali 25
26 Applicazioni di visione artificiale: Navigazione autonoma in un corridoio andata Il punto di vista del robot ritorno Il punto di vista del robot 26
27 Applicazioni di visione artificiale: navigazione autonoma in ambiente non strutturato Ingresso Mappa disparitàmappa a terra 27
28 Robotica autonoma RAS, Robot Antartico di Superficie 28
29 Robotica autonoma Progetti PRASSI / TECSIS 29
30 Robotica terrestre autonoma Scusate la densità di informazione domande? 30
I robot fra noi. Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università degli Studi di Firenze
 Dipartimento di Ingegneria Industriale Università degli Studi di Firenze a.ridolfi@unifi.it Cosa è un Robot? Il robot è un manipolatore multifunzionale riprogrammabile, progettato per muovere materiali,
Dipartimento di Ingegneria Industriale Università degli Studi di Firenze a.ridolfi@unifi.it Cosa è un Robot? Il robot è un manipolatore multifunzionale riprogrammabile, progettato per muovere materiali,
TABELLA A/1 OMOGENEITA DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO
 1 TABELLA A/1 OMOGENEITA DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO per l ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA
1 TABELLA A/1 OMOGENEITA DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO per l ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA
ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA DEI TITOLI PREVISTI DAL D.M.
 1 TABELLA A/1 OMOGENEITA DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO per l ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA
1 TABELLA A/1 OMOGENEITA DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO per l ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA
A 01 A - 11 A - 12 TABELLA A/1
 TABELLA A/1 OMOGENEITÀ DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO PER L ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA DEI
TABELLA A/1 OMOGENEITÀ DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO PER L ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA A NELLA COLONNA DEI
(Tabelle Tabella A/1 )
") (Tabelle Tabella A/1 ) TABELLA A/1 OMOGENEITA' DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO PER L'ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA
(Tabelle Tabella A/1 ) TABELLA A/1 OMOGENEITA' DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO PER L'ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA
Storia dell'arte medioevale
 TABELLA A/1 OMOGENEITA' DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO PER L'ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA "A" NELLA COLONNA
TABELLA A/1 OMOGENEITA' DEGLI ESAMI PREVISTI NEI PIANI DI STUDIO DEI TITOLI DI VECCHIO ORDINAMENTO PER L'ACCESSO ALLE CLASSI DI CONCORSO LIMITATAMENTE AI TITOLI PREVISTI DALLA TABELLA "A" NELLA COLONNA
 Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Applicazioni in Ambienti Ostili e Remoti
 Applicazioni in Ambienti Ostili e Remoti Vincenzo Nanni ENEA FUS/ROB 1 Sommario Presentazione Esempi di ambienti ostili e remoti Alcuni esempi di realizzazioni esistenti Esempi di realizzazioni in ENEA
Applicazioni in Ambienti Ostili e Remoti Vincenzo Nanni ENEA FUS/ROB 1 Sommario Presentazione Esempi di ambienti ostili e remoti Alcuni esempi di realizzazioni esistenti Esempi di realizzazioni in ENEA
TRASPORTI E LOGISTICA
 ! # % &%! & TRASPORTI E LOGISTICA Conduzione mezzo navale (ex capitani) 3^ 4^ 5^ ITALIANO 4 4 4 STORIA 2 2 2 INGLESE 3 3 3 MATEMATICA 4 4 3 SCIENZE MOTORIE 2 2 2 RELIGIONE 1 1 1 DIRITTO ED ECONOMIA 2 2
! # % &%! & TRASPORTI E LOGISTICA Conduzione mezzo navale (ex capitani) 3^ 4^ 5^ ITALIANO 4 4 4 STORIA 2 2 2 INGLESE 3 3 3 MATEMATICA 4 4 3 SCIENZE MOTORIE 2 2 2 RELIGIONE 1 1 1 DIRITTO ED ECONOMIA 2 2
Lezione 19: Il problema della localizzazione
 Robotica Robot Industriali e di Servizio Lezione 19: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Robotica Robot Industriali e di Servizio Lezione 19: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
ISTITUTO TECNICO STATALE COMMERCIALE E PER GEOMETRI Leonardo da VINCI Contrada Pergolo 74015 Martina Franca (TA) www.itcgdavinci.
 www.itcgdavinci.") ISTITUTO TECNICO STATALE COMMERCIALE E PER GEOMETRI Leonardo da VINCI Contrada Pergolo 74015 Martina Franca (TA) www.itcgdavinci.it PRESENTAZIONE DELL OFFERTA FORMATIVA DEL SETTORE TECNOLOGICO NELL AMBITO
ISTITUTO TECNICO STATALE COMMERCIALE E PER GEOMETRI Leonardo da VINCI Contrada Pergolo 74015 Martina Franca (TA) www.itcgdavinci.it PRESENTAZIONE DELL OFFERTA FORMATIVA DEL SETTORE TECNOLOGICO NELL AMBITO
Il Ministro dell'istruzione, dell Università e della Ricerca
 Allegato D Numerosità di riferimento studenti Tabella 1 Numerosità minime, massime e di riferimento per gruppi di classi di laurea e laurea magistrale Corsi di laurea A 50 75 10 B 100 150 20 C 180 230
Allegato D Numerosità di riferimento studenti Tabella 1 Numerosità minime, massime e di riferimento per gruppi di classi di laurea e laurea magistrale Corsi di laurea A 50 75 10 B 100 150 20 C 180 230
Fondamenti (Principi) di Controlli Automatici
 di Controlli Automatici") Fondamenti (Principi) di Controlli Automatici Docente: Ing. Gianluca Palli DEIS - Dipartimento di Elettronica, Informatica e Sistemistica LAR - Laboratorio di Automazione e Robotica Università di Bologna
Fondamenti (Principi) di Controlli Automatici Docente: Ing. Gianluca Palli DEIS - Dipartimento di Elettronica, Informatica e Sistemistica LAR - Laboratorio di Automazione e Robotica Università di Bologna
Classificazione Decimale Dewey presso la Biblioteca di Ingegneria
 A B C MATERIE Adesivi Agricoltura e tecnologie connesse Algebra e teoria dei numeri Altri rami dell ingegneria Analisi e progettazione strutturale Analisi funzionale Analisi matematica Analisi numerica
A B C MATERIE Adesivi Agricoltura e tecnologie connesse Algebra e teoria dei numeri Altri rami dell ingegneria Analisi e progettazione strutturale Analisi funzionale Analisi matematica Analisi numerica
Intelligenza Artificiale A (lezione introduttiva parte di teoria)
") Intelligenza Artificiale A (lezione introduttiva parte di teoria) Prof. Alfonso E. Gerevini Dipartimento di Elettronica per l Automazione Facoltà di Ingegneria Università degli Studi di Brescia Testo di
Intelligenza Artificiale A (lezione introduttiva parte di teoria) Prof. Alfonso E. Gerevini Dipartimento di Elettronica per l Automazione Facoltà di Ingegneria Università degli Studi di Brescia Testo di
Gruppo A: Area Medico-Sanitaria. Gruppo 8: Area Scientifico-Tecnologica. Gruppo C: Area Umanistica e Sociale
 Gruppo A: Area Medico-Sanitaria 02 Università di Bari A 2016 2 26,29333994 02 Università di Bari A 2016 6 27,07825197 02 Università di Bari A 2016 5 26,7437751 02 Università di Bari A 2016 3 25,97955205
Gruppo A: Area Medico-Sanitaria 02 Università di Bari A 2016 2 26,29333994 02 Università di Bari A 2016 6 27,07825197 02 Università di Bari A 2016 5 26,7437751 02 Università di Bari A 2016 3 25,97955205
Lezione 24 Ancora strutture per i robot mobili 15 maggio
 Robotica Robot Industriali e di Servizio Lezione 24: Ancora strutture per i robot 2 1 Strutture con ruote Anche se le ruote hanno molti difetti, sono il modo più semplice per spostare qualcosa 3 Quante
Robotica Robot Industriali e di Servizio Lezione 24: Ancora strutture per i robot 2 1 Strutture con ruote Anche se le ruote hanno molti difetti, sono il modo più semplice per spostare qualcosa 3 Quante
CLASSI DI LAUREA MAGISTRALE
 Allegato D CLASSI DI LAUREA MAGISTRALE CLASSI DI LAUREA MAGISTRALE INDIRIZZO DI LAUREA MACROAREA ASSEGNATA LM-1 ANTROPOLOGIA CULTURALE ED ETNOLOGIA LM-2 ARCHEOLOGIA LM-3 ARCHITETTURA DEL PAESAGGIO LM-4
Allegato D CLASSI DI LAUREA MAGISTRALE CLASSI DI LAUREA MAGISTRALE INDIRIZZO DI LAUREA MACROAREA ASSEGNATA LM-1 ANTROPOLOGIA CULTURALE ED ETNOLOGIA LM-2 ARCHEOLOGIA LM-3 ARCHITETTURA DEL PAESAGGIO LM-4
Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente
 Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente Torino, 12.12.2016 HuManS - Obiettivo generale progetto Il programma di ricerca è rivolto all'integrazione dei più recenti sistemi
Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente Torino, 12.12.2016 HuManS - Obiettivo generale progetto Il programma di ricerca è rivolto all'integrazione dei più recenti sistemi
Lezione 22 Ancora strutture per i robot mobili 13 maggio
 Robotica Robot Industriali e di Servizio Lezione 22: Ancora strutture per i robot Strutture con ruote Anche se le ruote hanno molti difetti, sono il modo più semplice per spostare qualcosa 2 1 Quante ruote?
Robotica Robot Industriali e di Servizio Lezione 22: Ancora strutture per i robot Strutture con ruote Anche se le ruote hanno molti difetti, sono il modo più semplice per spostare qualcosa 2 1 Quante ruote?
APPLICAZIONI E TECNOLOGIE DEI SISTEMI ROBOTICI INTELLIGENTI. I Beni Culturali: Robotica per l archeologia
 APPLICAZIONI E TECNOLOGIE DEI SISTEMI ROBOTICI INTELLIGENTI I Beni Culturali: Robotica per l archeologia Fiorello Cavallini Casaccia, 23 settembre 2004 Robotica per l Archeologia: Obiettivi Fruibilità
APPLICAZIONI E TECNOLOGIE DEI SISTEMI ROBOTICI INTELLIGENTI I Beni Culturali: Robotica per l archeologia Fiorello Cavallini Casaccia, 23 settembre 2004 Robotica per l Archeologia: Obiettivi Fruibilità
Lezione 26: Ancora strutture per i robot mobili
 Robotica Robot Industriali e di Servizio Lezione 26: Ancora strutture per i robot Riprendiamo cose già viste per ampliare le nostre conoscenze Strutture con ruote Anche se le ruote hanno molti difetti,
Robotica Robot Industriali e di Servizio Lezione 26: Ancora strutture per i robot Riprendiamo cose già viste per ampliare le nostre conoscenze Strutture con ruote Anche se le ruote hanno molti difetti,
Obiettivi formativi specifici
 Corso di Laurea Specialistica in Ingegneria Civile Classe: 28/S Facoltà: Ingegneria Numero di crediti necessari per il conseguimento del titolo: 300 Corso di Laurea i cui crediti sono integralmente riconosciuti:
Corso di Laurea Specialistica in Ingegneria Civile Classe: 28/S Facoltà: Ingegneria Numero di crediti necessari per il conseguimento del titolo: 300 Corso di Laurea i cui crediti sono integralmente riconosciuti:
Robotica Mobile Percezione
 Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
NOTA: PIANO DI STUDI LICEO CLASSICO. - Per la classe quinta è prevista 1 ora opzionale aggiuntiva di Diritto Costituzionale come approfondimento
 1 PIANO DI STUDI LICEO CLASSICO 1 2 3 4 anno anno anno anno Lingua e cultura latina 5 5 4 4 4 Lingua e cultura greca 4 4 3 3 3 Lingua e cultura inglese 3 3 3 3 3 Matematica 3 3 2 2 2 Scienze naturali*
1 PIANO DI STUDI LICEO CLASSICO 1 2 3 4 anno anno anno anno Lingua e cultura latina 5 5 4 4 4 Lingua e cultura greca 4 4 3 3 3 Lingua e cultura inglese 3 3 3 3 3 Matematica 3 3 2 2 2 Scienze naturali*
Corso di Laurea Specialistica in Informatica Università di Pisa
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Lezione 14 Il problema della localizzazione 19 aprile
 Robotica Robot Industriali e di Servizio Lezione 14: Il problema della localizzazione Ma la domanda fondamentale è: Come si fa a sapere dove si deve andare? E ancora prima: Come si fa a sapere dove si
Robotica Robot Industriali e di Servizio Lezione 14: Il problema della localizzazione Ma la domanda fondamentale è: Come si fa a sapere dove si deve andare? E ancora prima: Come si fa a sapere dove si
POLITECNICO DI TORINO ALLEGATO B - Bando D.R. n. 148 del Settore Scientifico disciplinare
 ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI per la copertura numero diciassette posti per ricercatore a tempo determinato di cui all art. 1 del bando D.R. n 148 del 18.02.2000 H06X GEOTECNICA
ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI per la copertura numero diciassette posti per ricercatore a tempo determinato di cui all art. 1 del bando D.R. n 148 del 18.02.2000 H06X GEOTECNICA
Il Ministro dell Istruzione, dell Università e della Ricerca
 Tabella 1 - Raggruppamenti dei corsi di studio per Area disciplinare. CORSI DI LAUREA Sanitaria L/SNT1 L/SNT2 L/SNT3 L/SNT4 Professioni sanitarie, infermieristiche e professione sanitaria ostetrica Professioni
Tabella 1 - Raggruppamenti dei corsi di studio per Area disciplinare. CORSI DI LAUREA Sanitaria L/SNT1 L/SNT2 L/SNT3 L/SNT4 Professioni sanitarie, infermieristiche e professione sanitaria ostetrica Professioni
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
FACOLTA DI SCIENZE E TECNOLOGIE APPLICATE ANNO ACCADEMICO 2016/2017
 FACOLTA DI SCIENZE E TECNOLOGIE APPLICATE ANNO ACCADEMICO 2016/2017 Le date d esame confermate sono pubblicate all interno del proprio corso in piattaforma, cliccando sul bottone "Servizi di Segreteria
FACOLTA DI SCIENZE E TECNOLOGIE APPLICATE ANNO ACCADEMICO 2016/2017 Le date d esame confermate sono pubblicate all interno del proprio corso in piattaforma, cliccando sul bottone "Servizi di Segreteria
180 CFU 120 CFU 120 CFU
 180 CFU 120 CFU 120 CFU 7 6 CFU tipo B a scelta vincolata 12 CFU a libera scelta, 12 Tirocinio/internato, 12 Tesi Il laureato acquisirà conoscenze di natura interdisciplinare, in prevalenza
180 CFU 120 CFU 120 CFU 7 6 CFU tipo B a scelta vincolata 12 CFU a libera scelta, 12 Tirocinio/internato, 12 Tesi Il laureato acquisirà conoscenze di natura interdisciplinare, in prevalenza
Sviluppo di architetture software innovative per l autonomia
 Sviluppo di architetture software innovative per l autonomia Angelo Oddi, Gianluca Baldassarre, Riccardo Rasconi, Vieri Giuliano Santucci, Gabriele Sartor, Emilio Cartoni nome.cognome@istc.cnr.it Istituto
Sviluppo di architetture software innovative per l autonomia Angelo Oddi, Gianluca Baldassarre, Riccardo Rasconi, Vieri Giuliano Santucci, Gabriele Sartor, Emilio Cartoni nome.cognome@istc.cnr.it Istituto
L-9 Classe delle lauree in INGEGNERIA INDUSTRIALE
 - area dell'ingegneria dell'automazione: imprese elettroniche, elettromeccaniche, spaziali, chimiche, aeronautiche in cui sono sviluppate funzioni di L-9 Classe delle lauree in INGEGNERIA INDUSTRIALE OBIETTIVI
- area dell'ingegneria dell'automazione: imprese elettroniche, elettromeccaniche, spaziali, chimiche, aeronautiche in cui sono sviluppate funzioni di L-9 Classe delle lauree in INGEGNERIA INDUSTRIALE OBIETTIVI
Università del Salento Facoltà di Scienze della Formazione, Scienze Politiche e Sociali CORSO DI INFORMATICA. UD0. Introduzione.
 CORSO DI INFORMATICA UD0. Introduzione Bruno Ronsivalle Docente G. Bruno Ronsivalle (1972) - Roma Filosofia, Meccanica quantistica e Intelligenza Artificiale Progettazione didattica, Docimologia e E-learning
CORSO DI INFORMATICA UD0. Introduzione Bruno Ronsivalle Docente G. Bruno Ronsivalle (1972) - Roma Filosofia, Meccanica quantistica e Intelligenza Artificiale Progettazione didattica, Docimologia e E-learning
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Università degli studi di Verona Facoltà di Scienze Matematiche Fisiche e Naturali
 Università degli studi di Verona Facoltà di Scienze Matematiche Fisiche e Naturali CLASSE 26: Scienze e Tecnologie Informatiche Corso di Laurea in Informatica Corso di Laurea in Informatica Multimediale
Università degli studi di Verona Facoltà di Scienze Matematiche Fisiche e Naturali CLASSE 26: Scienze e Tecnologie Informatiche Corso di Laurea in Informatica Corso di Laurea in Informatica Multimediale
CURRICULUM VITAE di Salvatore Gaglio
 Salvatore Gaglio 1 CURRICULUM VITAE di Salvatore Gaglio LUOGO DI NASCITA: Agrigento DATA DI NASCITA: 11 aprile 1954 Posizioni attuali Professore ordinario di Intelligenza Artificiale (Sett. disc. ING-INF/05
Salvatore Gaglio 1 CURRICULUM VITAE di Salvatore Gaglio LUOGO DI NASCITA: Agrigento DATA DI NASCITA: 11 aprile 1954 Posizioni attuali Professore ordinario di Intelligenza Artificiale (Sett. disc. ING-INF/05
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica
 CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
LABORATORI DI CULTURA DIGITALE: INFORMATICA, INTERNET E ROBOTICA
 Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
ALLEGATO A. Struttura Codice Numero studenti richiesti per tipologia Totale ore
 ALLEGATO A Struttura Codice Numero studenti richiesti per tipologia Totale SETTORE PIANIFICAZIONE EDILIZIA 100369 2/200h AREA PROMOZIONE E SVILUPPO 100281 - corso di laurea triennale in ingegneria civile
ALLEGATO A Struttura Codice Numero studenti richiesti per tipologia Totale SETTORE PIANIFICAZIONE EDILIZIA 100369 2/200h AREA PROMOZIONE E SVILUPPO 100281 - corso di laurea triennale in ingegneria civile
Lezione 3: Il problema della localizzazione
 Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
ISTITUTO TECNICO STATALE COMMERCIALE E PER GEOMETRI Leonardo da VINCI Contrada Pergolo Martina Franca (TA)
") ISTITUTO TECNICO STATALE COMMERCIALE E PER GEOMETRI Leonardo da VINCI Contrada Pergolo 74015 Martina Franca (TA) www.itcgdavinci.it PRESENTAZIONE DELL OFFERTA FORMATIVA DEL SETTORE TECNOLOGICO NELL AMBITO
ISTITUTO TECNICO STATALE COMMERCIALE E PER GEOMETRI Leonardo da VINCI Contrada Pergolo 74015 Martina Franca (TA) www.itcgdavinci.it PRESENTAZIONE DELL OFFERTA FORMATIVA DEL SETTORE TECNOLOGICO NELL AMBITO
Protezione installazioni militari: Sorveglianza con Robot. Autonomi Terrestri ed Aerei
 Protezione installazioni militari: Sorveglianza con Robot Autonomi Terrestri ed Aerei ANUTEI La protezione delle Installazioni Militari in Patria. Misure e Sistemi Roma, 23 Aprile 2009 Requisito Operativo:
Protezione installazioni militari: Sorveglianza con Robot Autonomi Terrestri ed Aerei ANUTEI La protezione delle Installazioni Militari in Patria. Misure e Sistemi Roma, 23 Aprile 2009 Requisito Operativo:
Agenti Intelligenti. Corso di Intelligenza Artificiale, a.a Prof. Francesco Trovò
 Agenti Intelligenti Corso di Intelligenza Artificiale, a.a. 2017-2018 Prof. Francesco Trovò 26/02/2018 Agenti Intelligenti Definizione di agente Razionalità Specifica dell ambiente Design di un agente
Agenti Intelligenti Corso di Intelligenza Artificiale, a.a. 2017-2018 Prof. Francesco Trovò 26/02/2018 Agenti Intelligenti Definizione di agente Razionalità Specifica dell ambiente Design di un agente
 È vietata la riproduzione dell opera o di parti di essa con qualsiasi mezzo, se non espressamente autorizzata dall editore. www.giuntios.it 2017 Giunti O.S. Psychometrics S.r.l. Via Fra Paolo Sarpi 7/a
È vietata la riproduzione dell opera o di parti di essa con qualsiasi mezzo, se non espressamente autorizzata dall editore. www.giuntios.it 2017 Giunti O.S. Psychometrics S.r.l. Via Fra Paolo Sarpi 7/a
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Lezione 1: Primi concetti e definizioni
 Robotica Robot Industriali e di Servizio Lezione 1: Primi concetti e definizioni \ Allora possiamo cominciare con le definizioni Potete non crederci, ma fino al 1994 non esisteva una definizione ufficiale
Robotica Robot Industriali e di Servizio Lezione 1: Primi concetti e definizioni \ Allora possiamo cominciare con le definizioni Potete non crederci, ma fino al 1994 non esisteva una definizione ufficiale
Il Ministro dell Istruzione, dell Università e della Ricerca
 Tabella 1 - Raggruppamenti dei corsi di studio per Area disciplinare. CORSI DI LAUREA Sanitaria L/SNT1 L/SNT2 L/SNT3 L/SNT4 Professioni sanitarie, infermieristiche e professione sanitaria ostetrica Professioni
Tabella 1 - Raggruppamenti dei corsi di studio per Area disciplinare. CORSI DI LAUREA Sanitaria L/SNT1 L/SNT2 L/SNT3 L/SNT4 Professioni sanitarie, infermieristiche e professione sanitaria ostetrica Professioni
INDIRIZZO ELETTRONICA ELETTROTECNICA
 INDIRIZZO ELETTRONICA ELETTROTECNICA ARTICOLAZIONE ELETTRONICA Discipline del piano di studi Ore settimanali per anno di corso I II III IV V Scienze motorie e sportive Religione Cattolica Attività Alter.
INDIRIZZO ELETTRONICA ELETTROTECNICA ARTICOLAZIONE ELETTRONICA Discipline del piano di studi Ore settimanali per anno di corso I II III IV V Scienze motorie e sportive Religione Cattolica Attività Alter.
ISTITUTO TECNICO TECNOLOGICO. Trasporti e logistica. Conduzione del mezzo aereo. ISTITUTO TECNICO ECONOMICO Amministrazione finanza e marketing
 ISTITUTO D ISTRUZIONE MARTINO MARTINI ISTITUTO TECNICO TECNOLOGICO Trasporti e logistica Conduzione del mezzo aereo ISTITUTO TECNICO ECONOMICO Amministrazione finanza e marketing Linee guida prioritarie
ISTITUTO D ISTRUZIONE MARTINO MARTINI ISTITUTO TECNICO TECNOLOGICO Trasporti e logistica Conduzione del mezzo aereo ISTITUTO TECNICO ECONOMICO Amministrazione finanza e marketing Linee guida prioritarie
ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI di cui all art. 2 del DR n 253 del
 ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI di cui all art. 2 del DR n 253 del 23.03.2000 D02B GEOLOGIA APPLICATA H02X INGEGNERIA SANITARIA- AMBIENTALE H09A TECNOLOGIA DELL'ARCHITETTURA
ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI di cui all art. 2 del DR n 253 del 23.03.2000 D02B GEOLOGIA APPLICATA H02X INGEGNERIA SANITARIA- AMBIENTALE H09A TECNOLOGIA DELL'ARCHITETTURA
Il Ministro dell Università e della Ricerca
 ALLEGATO 2 Corrispondenza tra Classi di laurea relative al D.M. 270/04 e Classi di laurea relative al D.M. 509/99 CLASSI DI LAUREA DM 270/04 CLASSI DI LAUREA DM 509/99 L-1 Beni culturali 13 Scienze dei
ALLEGATO 2 Corrispondenza tra Classi di laurea relative al D.M. 270/04 e Classi di laurea relative al D.M. 509/99 CLASSI DI LAUREA DM 270/04 CLASSI DI LAUREA DM 509/99 L-1 Beni culturali 13 Scienze dei
Università degli studi di Milano Bicocca Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Magistrale in INFORMATICA
 Università degli studi di Milano Bicocca Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Magistrale in INFORMATICA Offerta formativa Il (classe LM-18) ha, di norma, durata di due anni.
Università degli studi di Milano Bicocca Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Magistrale in INFORMATICA Offerta formativa Il (classe LM-18) ha, di norma, durata di due anni.
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Giovanni Cocca - CTO & Strategy Head of Innovative Projects Analysis & Demonstrations Tel :
 AZIENDA Selex Galileo Via G.V. Bona, 85 00156 Roma Tel. +39 06418831 Via dei Castelli Romani, 2 00040 Pomezia - (RM) Tel. +39 06911961 Altre 6 sedi in Italia 7 sedi in UK 1 sede in USA Web :http://www.selexgalileo.com
AZIENDA Selex Galileo Via G.V. Bona, 85 00156 Roma Tel. +39 06418831 Via dei Castelli Romani, 2 00040 Pomezia - (RM) Tel. +39 06911961 Altre 6 sedi in Italia 7 sedi in UK 1 sede in USA Web :http://www.selexgalileo.com
Università di Pisa Facoltà di Scienze Matematiche Fisiche e Naturali
 Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea Specialistica in Informatica (classe 23/S: Informatica) Corso di Laurea Specialistica in Tecnologie Informatiche (classe 23/S: Informatica)
Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea Specialistica in Informatica (classe 23/S: Informatica) Corso di Laurea Specialistica in Tecnologie Informatiche (classe 23/S: Informatica)
Progetto di Robotica 2.5 Crediti Anno Acc. 2005/2006 (Docente: PhD. Ing. Michele Folgheraiter)
") Progetto di Robotica 2.5 Crediti Anno Acc. 2005/2006 (Docente: PhD. Ing. Michele Folgheraiter). Obiettivi: Lo scopo del progetto è di dare allo studente l'opportunità di approfondire una tematica inerente
Progetto di Robotica 2.5 Crediti Anno Acc. 2005/2006 (Docente: PhD. Ing. Michele Folgheraiter). Obiettivi: Lo scopo del progetto è di dare allo studente l'opportunità di approfondire una tematica inerente
Le aree dell informatica
 Fondamenti di Informatica per la Sicurezza a.a. 2006/07 Le aree dell informatica Stefano Ferrari UNIVERSITÀ DEGLI STUDI DI MILANO DIPARTIMENTO DI TECNOLOGIE DELL INFORMAZIONE Stefano Ferrari Università
Fondamenti di Informatica per la Sicurezza a.a. 2006/07 Le aree dell informatica Stefano Ferrari UNIVERSITÀ DEGLI STUDI DI MILANO DIPARTIMENTO DI TECNOLOGIE DELL INFORMAZIONE Stefano Ferrari Università
Roomba 980 COMUNICATO STAMPA
 Roomba 980 COMUNICATO STAMPA IROBOT ENTRA NELLA SMART HOME CON IL NUOVO ROBOT ASPIRAPOLVERE ROOMBA 980 CON IL NUOVO SISTEMA DI NAVIGAZIONE CON VISUAL LOCALIZATION, IL CONTROLLO BASATO SU APP E LA CONNETTIVITÀ
Roomba 980 COMUNICATO STAMPA IROBOT ENTRA NELLA SMART HOME CON IL NUOVO ROBOT ASPIRAPOLVERE ROOMBA 980 CON IL NUOVO SISTEMA DI NAVIGAZIONE CON VISUAL LOCALIZATION, IL CONTROLLO BASATO SU APP E LA CONNETTIVITÀ
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
SETTORE TECNOLOGICO - TRASPORTI E LOGISTICA Articolazione Conduzione del mezzo aereo (Aeronautico)
") SETTORE TECNOLOGICO - TRASPORTI E LOGISTICA Articolazione Conduzione del mezzo aereo (Aeronautico) Il diplomato dei Trasporti e della Logistica Costruzione e Manutenzione dell aereo ha competenze tecniche
SETTORE TECNOLOGICO - TRASPORTI E LOGISTICA Articolazione Conduzione del mezzo aereo (Aeronautico) Il diplomato dei Trasporti e della Logistica Costruzione e Manutenzione dell aereo ha competenze tecniche
ALLEGATO A (D.R. n. 832 del ) AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE
 AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE") ALLEGATO A (D.R. n. 832 del 14.10.2013) AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE PROGRAMMA DI RICERCA N. 1 Affissione dei criteri per la valutazione dei titoli e del colloquio:
ALLEGATO A (D.R. n. 832 del 14.10.2013) AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE PROGRAMMA DI RICERCA N. 1 Affissione dei criteri per la valutazione dei titoli e del colloquio:
Elaborati di Robotica Avanzata
 Elaborati di Robotica Avanzata Prof. Bruno SICILIANO www.prisma.unina.it Robotica Avanzata Elaborati di Robotica Avanzata 2/29 La robotica avanzata è la scienza che studia robot con spiccate caratteristiche
Elaborati di Robotica Avanzata Prof. Bruno SICILIANO www.prisma.unina.it Robotica Avanzata Elaborati di Robotica Avanzata 2/29 La robotica avanzata è la scienza che studia robot con spiccate caratteristiche
Classe delle lauree specialistiche in Ingegneria dell Automazione
 guida della facoltà ingegneria a.a. 2008-2009 163 Classe delle lauree specialistiche in Ingegneria dell Automazione CORSO DI LAUREA IN INGEGNERIA DELL AUTOMAZIONE Referente del Corso Laurea- Prof. Luigi
guida della facoltà ingegneria a.a. 2008-2009 163 Classe delle lauree specialistiche in Ingegneria dell Automazione CORSO DI LAUREA IN INGEGNERIA DELL AUTOMAZIONE Referente del Corso Laurea- Prof. Luigi
Corso di Studio in Ingegneria dell Automazione Open Day
 Corso di Studio in Ingegneria dell Automazione Open Day 8 Aprile 2017 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Corso di Studio in Ingegneria dell Automazione Open Day 8 Aprile 2017 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
INTELLIGENZA ARTIFICIALE: INTRODUZIONE
 INTELLIGENZA ARTIFICIALE: INTRODUZIONE 1 AI: Preistoria Filosofia Logica, metodi di ragionamento,, la mente, l apprendimento,, la razionalità Matematica rappresentazione formale,dimostrazioni, computazioni,
INTELLIGENZA ARTIFICIALE: INTRODUZIONE 1 AI: Preistoria Filosofia Logica, metodi di ragionamento,, la mente, l apprendimento,, la razionalità Matematica rappresentazione formale,dimostrazioni, computazioni,
Ingegneria elettronica
 Ingegneria elettronica Classe 32/S-Classe delle lauree specialistiche in ingegneria elettronica Data del DM di approvazione dell ordinamento didattico 25/05/2007 Data di emanazione dell ordinamento didattico
Ingegneria elettronica Classe 32/S-Classe delle lauree specialistiche in ingegneria elettronica Data del DM di approvazione dell ordinamento didattico 25/05/2007 Data di emanazione dell ordinamento didattico
DIRITTO CIVILE, COMMERCIALE E INTERNAZIONALE (CODICE 6592) DIRITTO COSTITUZIONALE INTERNO, COMPARATO ED EUROPEO (CODICE 6595)
 DIRITTO COSTITUZIONALE INTERNO, COMPARATO ED EUROPEO (CODICE 6595)") ARCHITETTURA DESIGN (6577) 3/7/2017 ore 14 presso la Direzione del Dipartimento DAD ARCHITETTURA ARCHITETTURA (6576) 3/7/2017 ore 14 presso la Direzione del Dipartimento DAD BIOTECNOLOGIE IN MEDICINA TRASLAZIONALE
ARCHITETTURA DESIGN (6577) 3/7/2017 ore 14 presso la Direzione del Dipartimento DAD ARCHITETTURA ARCHITETTURA (6576) 3/7/2017 ore 14 presso la Direzione del Dipartimento DAD BIOTECNOLOGIE IN MEDICINA TRASLAZIONALE
Il Ministro dell Istruzione, dell Università e della Ricerca
 Il Ministro dell Istruzione, dell Università e della Ricerca TABELLA A MATERIE CARATTERIZZANTI I SINGOLI CORSI DI STUDIO DEI PERCORSI LICEALI OGGETTO DELLA SECONDA PROVA SCRITTA LICEO CLASSICO 1. Latino
Il Ministro dell Istruzione, dell Università e della Ricerca TABELLA A MATERIE CARATTERIZZANTI I SINGOLI CORSI DI STUDIO DEI PERCORSI LICEALI OGGETTO DELLA SECONDA PROVA SCRITTA LICEO CLASSICO 1. Latino
Rimodulazione coerente con Negoziazione
 Riepilogo Dipartimento Sistemi di Produzione Dipartimento Sistemi di Produzione 2005 terzi fondi diretta Prodotti e processi industriali high tech 891.882 95.240 1.914.533 311.307 4.648.494 1.144.542 263.315
Riepilogo Dipartimento Sistemi di Produzione Dipartimento Sistemi di Produzione 2005 terzi fondi diretta Prodotti e processi industriali high tech 891.882 95.240 1.914.533 311.307 4.648.494 1.144.542 263.315
Progetto di metodi discreti e probabilistici per l'informatica
 Progetto di metodi discreti e probabilistici per l'informatica Anno Accademico 2010/2011 Progetti Prof Fiora Pirri Tutor Mario Gianni Progetto 1 Descrizione: dato un sistema robotico si vuole realizzare
Progetto di metodi discreti e probabilistici per l'informatica Anno Accademico 2010/2011 Progetti Prof Fiora Pirri Tutor Mario Gianni Progetto 1 Descrizione: dato un sistema robotico si vuole realizzare
 Il Ministro dell Istruzione, dell Università e della Ricerca TABELLA A MATERIE CARATTERIZZANTI I SINGOLI CORSI DI STUDIO DEI PERCORSI LICEALI OGGETTO DELLA SECONDA PROVA SCRITTA LICEO CLASSICO 1. Latino
Il Ministro dell Istruzione, dell Università e della Ricerca TABELLA A MATERIE CARATTERIZZANTI I SINGOLI CORSI DI STUDIO DEI PERCORSI LICEALI OGGETTO DELLA SECONDA PROVA SCRITTA LICEO CLASSICO 1. Latino
Fondamenti (Principi) di Controlli Automatici
 di Controlli Automatici") Fondamenti (Principi) di Controlli Automatici Docente: Ing. Gianluca Palli DEIS - Dipartimento di Elettronica, Informatica e Sistemistica LAR - Laboratorio di Automazione e Robotica Università di Bologna
Fondamenti (Principi) di Controlli Automatici Docente: Ing. Gianluca Palli DEIS - Dipartimento di Elettronica, Informatica e Sistemistica LAR - Laboratorio di Automazione e Robotica Università di Bologna
Ricerca: un "orto marziano" made in Italy per alimentare le future missioni su Marte.
 Ricerca: un "orto marziano" made in Italy per alimentare le future missioni su Marte. Realizzato da ASI, ENEA e Università di Milano nell ambito dell esperimento di biologia delle piante HortExtreme, l'orto,
Ricerca: un "orto marziano" made in Italy per alimentare le future missioni su Marte. Realizzato da ASI, ENEA e Università di Milano nell ambito dell esperimento di biologia delle piante HortExtreme, l'orto,
10-Classe delle lauree in ingegneria industriale Nome del corso. Ingegneria navale
 Università Università degli studi di Genova Classe 10-Classe delle lauree in ingegneria industriale Nome del corso Ingegneria navale Modifica di Ingegneria navale (codice=23064) Denominazione inglese Naval
Università Università degli studi di Genova Classe 10-Classe delle lauree in ingegneria industriale Nome del corso Ingegneria navale Modifica di Ingegneria navale (codice=23064) Denominazione inglese Naval
il seguente questionario ha l'obiettivo di raccogliere il Tuo giudizio in merito ai servizi tecnico-amministrativi forniti dall'ateneo.
 1 of 16 1/29/2019, 4:19 PM Gentile collega, il seguente questionario ha l'obiettivo di raccogliere il Tuo giudizio in merito ai servizi tecnico-amministrativi forniti dall'ateneo. Ti chiediamo la cortesia
1 of 16 1/29/2019, 4:19 PM Gentile collega, il seguente questionario ha l'obiettivo di raccogliere il Tuo giudizio in merito ai servizi tecnico-amministrativi forniti dall'ateneo. Ti chiediamo la cortesia
Ingegneria dell Automazione ATTIVAZIONE
 ORDINAMENTO DIDATTICO LAUREA SPECIALISTICA IN INGEGNERIA DELL AUTOMAZIONE CLASSE 29/S NOME DEL CORSO Ingegneria dell Automazione ATTIVAZIONE Di nuova attivazione Corso di Laurea i cui 180 CFU sono Ingegneria
ORDINAMENTO DIDATTICO LAUREA SPECIALISTICA IN INGEGNERIA DELL AUTOMAZIONE CLASSE 29/S NOME DEL CORSO Ingegneria dell Automazione ATTIVAZIONE Di nuova attivazione Corso di Laurea i cui 180 CFU sono Ingegneria
ECOWELD+ POR FESR Azione I.1b.1.2 Poli di Innovazione Agenda Strategica di Ricerca 2016 LASERLAM. Carlo Ferraro CEO
 Incontro con Regione Piemonte 5 marzo 2018 POR FESR 2014-2020 - Azione I.1b.1.2 Poli di Innovazione Agenda Strategica di Ricerca 2016 ECOWELD+ LASERLAM Carlo Ferraro CEO Executive summary del progetto
Incontro con Regione Piemonte 5 marzo 2018 POR FESR 2014-2020 - Azione I.1b.1.2 Poli di Innovazione Agenda Strategica di Ricerca 2016 ECOWELD+ LASERLAM Carlo Ferraro CEO Executive summary del progetto
Evento organizzato da. i Basilio Bona
 Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Prof.ssa Cecilia Laschi
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
ORDINAMENTO DIDATTICO. Classe 9 Ingegneria dell Informazione D.M. 509/99 OBIETTIVI FORMATIVI QUALIFICANTI
 ORDINAMENTO DIDATTICO Corso di laurea in dell Automazione Classe 9 dell Informazione D.M. 509/99 Facoltà CORSO DI NUOVA ATTIVAZIONE SI OBIETTIVI FORMATIVI QUALIFICANTI I laureati in dell Automazione dovranno:
ORDINAMENTO DIDATTICO Corso di laurea in dell Automazione Classe 9 dell Informazione D.M. 509/99 Facoltà CORSO DI NUOVA ATTIVAZIONE SI OBIETTIVI FORMATIVI QUALIFICANTI I laureati in dell Automazione dovranno:
Il Ministro dell Istruzione, dell Università e della Ricerca
 TABELLA A MATERIE CARATTERIZZANTI I SINGOLI CORSI DI STUDIO DEI PERCORSI LICEALI OGGETTO DELLA SECONDA PROVA SCRITTA LICEO CLASSICO 1. Latino 2. Greco LICEO SCIENTIFICO LICEO SCIENTIFICO SEZIONE SPORTIVA
TABELLA A MATERIE CARATTERIZZANTI I SINGOLI CORSI DI STUDIO DEI PERCORSI LICEALI OGGETTO DELLA SECONDA PROVA SCRITTA LICEO CLASSICO 1. Latino 2. Greco LICEO SCIENTIFICO LICEO SCIENTIFICO SEZIONE SPORTIVA
PARTICOLARI COMUNI AI PERCOSI DEI LICEI
 Allegato parte integrante 2.1 - Licei LICEI Definizione del quadro orario settimanale con una ripartizione della quantificazione oraria annuale di insegnamento di ciascuna disciplina obbligatoria in unità
Allegato parte integrante 2.1 - Licei LICEI Definizione del quadro orario settimanale con una ripartizione della quantificazione oraria annuale di insegnamento di ciascuna disciplina obbligatoria in unità
Intelligenza Artificiale. Introduzione. Intelligenza Artificiale Daniele Nardi, 2004 Introduzione 0
 Intelligenza Artificiale Introduzione Intelligenza Artificiale Daniele Nardi, 2004 Introduzione 0 Sommario Cosa è l AI? Una breve storia Intelligenza Artificiale Daniele Nardi, 2004 Introduzione 1 Cosa
Intelligenza Artificiale Introduzione Intelligenza Artificiale Daniele Nardi, 2004 Introduzione 0 Sommario Cosa è l AI? Una breve storia Intelligenza Artificiale Daniele Nardi, 2004 Introduzione 1 Cosa
ALLEGATO - nota esplicativa
 ALLEGATO - nota esplicativa Nelle tabelle vengono presentati alcuni parametri significativi delle distribuzioni, per corso di studi, degli studenti iscritti nell a.a. 2007/08 (immatricolati per i corsi
ALLEGATO - nota esplicativa Nelle tabelle vengono presentati alcuni parametri significativi delle distribuzioni, per corso di studi, degli studenti iscritti nell a.a. 2007/08 (immatricolati per i corsi
Progetto ISOTRACTOR Laboratorio Isobus del Distretto della Meccanica Agricola
 Progetto ISOTRACTOR Laboratorio Isobus del Distretto della Meccanica Agricola Partner Imprese ARGO TRACTORS Spa WALVOIL Spa COMER INDUSTRIES Spa COBO GROUP Spa ARAG Srl OGNIBENE Spa RE:LAB Srl Laboratori/Enti
Progetto ISOTRACTOR Laboratorio Isobus del Distretto della Meccanica Agricola Partner Imprese ARGO TRACTORS Spa WALVOIL Spa COMER INDUSTRIES Spa COBO GROUP Spa ARAG Srl OGNIBENE Spa RE:LAB Srl Laboratori/Enti
Intelligenza Artificiale. Introduzione. Intelligenza Artificiale Daniele Nardi, 2003 Introduzione 0
 Intelligenza Artificiale Introduzione Intelligenza Artificiale Daniele Nardi, 2003 Introduzione 0 Sommario Cosa è l AI? Una breve storia Intelligenza Artificiale Daniele Nardi, 2003 Introduzione 1 Cosa
Intelligenza Artificiale Introduzione Intelligenza Artificiale Daniele Nardi, 2003 Introduzione 0 Sommario Cosa è l AI? Una breve storia Intelligenza Artificiale Daniele Nardi, 2003 Introduzione 1 Cosa
We learn, we build, we play with LEGO Bricks. BeMotion s.r.l. Percorso Owl. ( anni) Percorso dedicato alla scuola secondaria
 Percorso dedicato alla scuola secondaria") We learn, we build, we play with LEGO Bricks BeMotion s.r.l. Percorso Owl (11 14+ anni) Percorso dedicato alla scuola secondaria Il Percorso Owl è specificamente progettato per ragazzi dagli 11 ai 14+
We learn, we build, we play with LEGO Bricks BeMotion s.r.l. Percorso Owl (11 14+ anni) Percorso dedicato alla scuola secondaria Il Percorso Owl è specificamente progettato per ragazzi dagli 11 ai 14+
32 Laurea magistrale in Informatica Scienze
 32 Laurea magistrale in Informatica Scienze Il corso prepara alle professioni di (codifiche ISTAT): Analisti e progettisti di software Analisti di sistema Analisti e progettisti di applicazioni web P I
32 Laurea magistrale in Informatica Scienze Il corso prepara alle professioni di (codifiche ISTAT): Analisti e progettisti di software Analisti di sistema Analisti e progettisti di applicazioni web P I
ORDINAMENTO. Codice corso di studio: Art. 1 Informazioni generali. Dipartimento proponente e di gestione
 ALL.1) ORDINAMENTO MASTER DI II LIVELLO IN SATELLITI E PIATTAFORME ORBITANTI Codice corso di : 04631 Art. 1 Informazioni generali Dipartimento proponente e di gestione Facoltà di riferimento Dipartimento
ALL.1) ORDINAMENTO MASTER DI II LIVELLO IN SATELLITI E PIATTAFORME ORBITANTI Codice corso di : 04631 Art. 1 Informazioni generali Dipartimento proponente e di gestione Facoltà di riferimento Dipartimento
Fondamenti di Controlli Automatici Principi di Controlli Automatici
 Fondamenti di Controlli Automatici Principi di Controlli Automatici Riccardo Morselli Ricercatore Dipartimento di Ingegneria dell Informazione Laboratorio ELECOM 2 o piano e-mail: morselli.riccardo@unimore.it
Fondamenti di Controlli Automatici Principi di Controlli Automatici Riccardo Morselli Ricercatore Dipartimento di Ingegneria dell Informazione Laboratorio ELECOM 2 o piano e-mail: morselli.riccardo@unimore.it
Corso di Laurea Ingegneria Civile
 Corso di Laurea Ingegneria Civile Presentazione del corso di Fondamenti di Informatica Dm. 270 6 cfu Carla Limongelli Marzo 2010 1 Benvenuti!!! 2 Docenti del corso Prof. Carla Limongelli limongel@dia.uniroma3.it
Corso di Laurea Ingegneria Civile Presentazione del corso di Fondamenti di Informatica Dm. 270 6 cfu Carla Limongelli Marzo 2010 1 Benvenuti!!! 2 Docenti del corso Prof. Carla Limongelli limongel@dia.uniroma3.it
We learn, we build, we play with LEGO Bricks. BeMotion s.r.l. Percorso Owl. ( anni) Percorso dedicato alla scuola secondaria
 Percorso dedicato alla scuola secondaria") We learn, we build, we play with LEGO Bricks BeMotion s.r.l. Percorso Owl (11 15+ anni) Percorso dedicato alla scuola secondaria Il Percorso Owl è specificamente progettato per ragazzi dagli 11 ai 13+
We learn, we build, we play with LEGO Bricks BeMotion s.r.l. Percorso Owl (11 15+ anni) Percorso dedicato alla scuola secondaria Il Percorso Owl è specificamente progettato per ragazzi dagli 11 ai 13+
FACOLTA DI SCIENZE E TECNOLOGIE APPLICATE ANNO ACCADEMICO 2015/2016
 FACOLTA DI SCIENZE E TECNOLOGIE APPLICATE ANNO ACCADEMICO 2015/2016 Le date d esame confermate sono pubblicate all interno del proprio corso in piattaforma, cliccando sul bottone "Servizi di Segreteria
FACOLTA DI SCIENZE E TECNOLOGIE APPLICATE ANNO ACCADEMICO 2015/2016 Le date d esame confermate sono pubblicate all interno del proprio corso in piattaforma, cliccando sul bottone "Servizi di Segreteria
L Utenza Debole: Tecnologie per la Riabilitazione e l Assistenza
 L Utenza Debole: Tecnologie per la Riabilitazione e l Assistenza Jorge Manzano Sezione Robotica - Unità Tecnico Scientifica Fusione ENEA I giovedì della Cultura Scientifica: Applicazioni e tecnologie dei
L Utenza Debole: Tecnologie per la Riabilitazione e l Assistenza Jorge Manzano Sezione Robotica - Unità Tecnico Scientifica Fusione ENEA I giovedì della Cultura Scientifica: Applicazioni e tecnologie dei
produzione, dei servizi e delle professioni (art. 11 comma 4 DM509 del 3/11/99) sono state consultate in data 26/02/2003
 sono state consultate in data 26/02/2003") Allegato 23) Università degli Studi di BERGAMO Scheda informativa Università Classe Nome del corso Università degli Studi di BERGAMO Data del DM di approvazione del ordinamento 20/02/2004 didattico Data
Allegato 23) Università degli Studi di BERGAMO Scheda informativa Università Classe Nome del corso Università degli Studi di BERGAMO Data del DM di approvazione del ordinamento 20/02/2004 didattico Data