POLITECNICO DI TORINO Repository ISTITUZIONALE
|
|
|
- Cristina Volpe
- 3 anni fa
- Visualizzazioni
Transcript
.")
1 POLITECNICO DI TORINO Repository ISTITUZIONALE Sistema, dispositivo, e metodo per il rilevamento del moto di un autoveicolo e la stima dell angolo di assetto Original Sistema, dispositivo, e metodo per il rilevamento del moto di un autoveicolo e la stima dell angolo di assetto / Mauro, Stefano; Pastorelli, Stefano; Galvagno, Enrico. - (2017). Availability: This version is available at: 11583/ since: T22:36:50Z Publisher: Published DOI: Terms of use: openaccess This article is made available under terms and conditions as specified in the corresponding bibliographic description in the repository Publisher copyright (Article begins on next page) 21 April 2021
2 Classifiche IPC DOMANDA DI INVENZIONE NUMERO Data Deposito 25/10/2017 Data Pubblicazione 25/04/2019 Sezione Classe Sottoclasse Gruppo Sottogruppo B 60 T Sezione Classe Sottoclasse Gruppo Sottogruppo B 60 W Titolo SISTEMA, DISPOSITIVO, E METODO PER IL RILEVAMENTO DEL MOTO DI UN AUTOVEICOLO E LA STIMA DELL?ANGOLO DI ASSETTO
3 Descrizione dell Invenzione Industriale dal titolo: SISTEMA, DISPOSITIVO, E METODO PER IL RILEVAMENTO DEL MOTO DI UN AUTOVEICOLO E LA STIMA DELL ANGOLO DI ASSETTO a nome di POLITECNICO DI TORINO, di nazionalità italiana, con sede in Corso Duca degli Abruzzi 24, Torino, ed elettivamente domiciliata, ai fini del presente incarico, presso i Mandatari Gian Antonio PANCOT (372 BM), Matteo BARONI (No. Iscr. Albo 1064BM), Mirco BIANCO (No. Iscr. Albo 1639B), Corrado BORSANO (No. Iscr. Albo 446BM), Marco CAMOLESE (No. Iscr. Albo 882BM), Filippo FERRONI (No. Iscr. Albo 530BM), Elisa GIRALDI (No. Iscr. Albo 1650B) e Giancarlo REPOSIO (No. Iscr. Albo 1168BM) c/o Metroconsult S.r.l., Via Sestriere 100, NONE (TO). Inventori designati: - Stefano MAURO, residenza in Via Ponza 4,10121 Torino (TO), nazionalità italiana; - Stefano PASTORELLI, residenza in Via Monte Asolone 4C, Torino (TO), nazionalità italiana; - Enrico GALVAGNO, residenza in P.zza Giuseppe Alessandria 18, Narzole (CN), nazionalità italiana. Depositato il: No. DESCRIZIONE Campo dell invenzione La presente invenzione si riferisce alle tecniche per il rilevamento del moto di un veicolo e la stima dell angolo di assetto. Sfondo tecnologico Dall analisi delle anteriorità non risulta che esistano sistemi di misura in grado di soddisfare contemporaneamente le seguenti specifiche: 1
4 - capacità di ricostruire lo stato di moto di un veicolo e l angolo di assetto, - in modo completamente indipendente dalle informazioni provenienti dalla sensoristica di bordo veicolo (rete CAN - Controller Area Network), - in modo non invasivo, e - che risulti economico (costo inferiore ai 1000 ). Nel documento Xu Li, Xiang Song, Chingyao Chan, Reliable vehicle sideslip angle fusion estimation using low-cost sensors, Measurement, Volume 51, May 2014, Pages , ISSN , si descrive che l angolo di assetto di un veicolo può essere valutato seguendo quattro metodologie differenti. Tali metodologie vengono qui sotto riportate. Metodologia a): misura diretta mediante sensori ottici, cosiddetti speed-over-ground sensors, (come il sensore prodotto dalla Datron Technology: Corrsys Datron Optical Sensors CORREVIT 5-350) oppure basati su due o più antenne GPS ad alte prestazioni (come ad esempio il sistema xnav200 prodotto dalla OXTS ed il sistema descritto nel brevetto US , Determination and control of vehicle sideslip using GPS ); queste soluzioni permettono di avere una ottima precisione ma richiedono sistemi molto costosi (ordine di grandezza del costo ) e pertanto non adatti ad applicazioni commerciali di larga scala. Metodologia b): stimatori basati su modelli cinematici: impiegano i segnali provenienti da accelerometri e giroscopi (IMU low cost o da rete CAN) ed eventualmente da GPS ed implementano integrazioni 2
5 numeriche, come descritto ad esempio nel documento DE (Al), Method for determining sideslip angle in driving state-interacting control system in vehicle, involves determining longitudinal and lateral acceleration of longitudinal speed and greed rate of vehicle, BOSCH GMBH ROBERT, algoritmi basati su relazioni cinematiche, oppure stimatori (tipicamente filtri di Kalman, come descritto ad esempio nel documento JP (A), Vehicle body sideslip angle estimation device, NISSAN MOTOR; UNIV YAMANASHI). Sono metodi semplici e robusti ma con problemi di accuratezza dovuti all integrazione di segnali affetti da errori (drift/bias) nel primo caso e, per gli stimatori, di non-osservabilità a basse velocità di imbardata. Ci sono inoltre alcuni brevetti che mostrano come l angolo di assetto si possa ricavare, almeno teoricamente, da semplici relazioni cinematiche una volta note le misure effettuate da alcuni sensori (velocità ruote, velocità di imbardata, accelerometro longitudinale e laterale) già presenti sul veicolo e condivisi mediante la rete CAN; il documento CN (A), Vehicle-mounted GPS (Global Positioning System) based vehicle sideslip angle estimation method and hardware, utilizza la velocità assoluta del veicolo letta dal GPS e le velocità angolari delle due ruote posteriori, lette dalla rete CAN del veicolo, per stimare mediante relazioni algebriche l angolo di assetto; il documento JP (A), Running state estimation device, automobile and running state estimation method, NISSAN valuta l angolo di assetto a partire dalla velocità di imbardata e dalla differenza di velocità di rotazione tra la ruota destra e sinistra; nel documento US
6 Al, Sideslip angle estimation apparatus and method and automotive vehicle incorporating the same, Nissan Motor Co., Ltd, l angolo di assetto viene derivato dall angolo tra la forza centrifuga in curva e la direzione laterale, note le misure di accelerazione del veicolo in direzione longitudinale e laterale. Metodologia c): stimatori basati su modelli dinamici di veicolo: gli stati sono calcolati per mezzo di stimatori progettati a partire da modelli dinamici semplici (modello a bicicletta o sue varianti), vedere ad esempio l articolo: D.M. Bevly, R. Sheridan, J.C. Gerdes, Integrating INS sensors with GPS velocity measurements for continuous estimation of vehicle sideslip and tire cornering stiffness, in: Proceedings of the American Control Conference, Arlington, VA, USA, June Queste soluzioni basate sugli stimatori sono meno affette da errori di bias/drift dei sensori, ma l efficacia dipende molto dalla precisione del modello e della scelta dei parametri. In condizioni non lineari la stima peggiora molto. Impiegano sempre sensori IMU low cost, ma richiedono la misura dell angolo volante (che viene normalmente prelevata dalla rete CAN del veicolo). Metodologia d): metodi ibridi che utilizzano sia modelli cinematici che dinamici. Combinando opportunamente i metodi ai punti b) e c), si ottengono soluzioni come ad esempio la hybrid fusion estimation strategy, illustrata nel documento Xu Li, Xiang Song, Chingyao Chan, Reliable vehicle sideslip angle fusion estimation using low-cost sensors, Measurement, Volume 51, May 2014, Pages , ISSN , 4
7 Con tali soluzioni ibride è possibile ottenere i vantaggi dei due metodi cinematici e dinamici superandone al contempo i limiti, permettendo così di stimare accuratamente l angolo di assetto in un ampia gamma di scenari di guida. A livello di sensoristica, questi metodi richiedono l impiego di IMU low cost e della misura dell angolo volante. Tutti i metodi ibridi, descritti nei vari brevetti e pubblicazioni analizzati, impiegano come sorgente di informazione dell angolo volante la misura disponibile da rete CAN. Ad esempio, il documento Kun Jiang, Alessandro Correa Victorino, Ali Charara, Real-Time Estimation of Vehicle s Lateral Dynamics at Inclined Road Employing Extended Kalman Filter, 11th IEEE conference on Industrial Electronics and Applications (ICIEA 2016), Jun 2016, Hefei, China, descrive un metodo che utilizza contemporaneamente l integrazione diretta di un equazione cinematica e un modello fisico non lineare di dinamica del veicolo secondo una tecnica di sensor fusion basata su un filtro di Kalman esteso (EKF). Un discorso a parte merita l angolo volante che, a seconda della scelta del metodo di misura, può influenzare parecchio i costi e la complessità di installazione del sistema. Come è stato descritto in precedenza, i modelli dinamici usano tale informazione come input per stimare il comportamento dinamico del veicolo ed è quindi indispensabile per poter alimentare l algoritmo di stima. Un ampia panoramica di sistemi per la misura dell angolo volante è discussa nell introduzione della tesi di laurea di Johan Svensson, Design of a portable steering wheel angle measurement system, Master Thesis, TRITA-AVE 2015:07, ISSN , in cui si 5
8 evidenzia altresì la necessita di rendere gli interventi al sistema di sterzo il più possibile trasparenti al guidatore per non compromettere la significatività della manovra eseguita. Nonostante esistano numerosi sistemi di misura dell angolo volante senza contatto (vedere ad esempio il documento CN (A), Non-contact magnetic transmission absolute angle sensor for steering system of automobile e il documento JP S (A), Rotating angle detector ), questi sistemi normalmente prevedono l installazione di una ruota fonica sul piantone di sterzo in modo da poter rilevare, ad esempio con sensori ad effetto Hall, la posizione angolare del volante; essi risultano quindi troppo invasivi e non adeguati agli scopi proposti. Alcuni sensori commerciali per la misura contemporanea della coppia e dell angolo volante (come ad esempio il sensore Steering Effort Sensor KMT-CLS) prevedono di inserire tra il volante e la colonna di sterzo un sensore in grado di rilevare le suddette grandezze, modificando così la geometria del sistema di sterzo originale della vettura e richiedendo lavorazioni meccaniche di adattamento allo specifico modello di veicolo. Altri sensori, come il sensore Kistler Type CMSWB, consentono invece la misura di coppia, angolo e velocità senza necessità di interventi meccanici invasivi in fase di installazione ancorandosi direttamente al volante. In pratica si viene ad avere un secondo volante applicato sul primo. In questo caso il costo dei sensori comprensivi dell elettronica di condizionamento può variare tra e
9 Queste soluzioni non sono pertanto compatibili con la necessità di avere un sistema completamente esterno e non invasivo per il veicolo su cui effettuare i rilievi. Scopo e sintesi L invenzione qui descritta riguarda un sistema e un dispositivo, installabile su di un veicolo, comprendente una piattaforma inerziale basata su un sensore in grado di fornire dati di accelerazione, velocità angolare e campo magnetico, un dispositivo di localizzazione, ad esempio GPS o Galileo, che fornisce il segnale di posizione e velocità lineare, e un dispositivo per la misura dell angolo volante, in cui i dati provenienti dai sensori sono elaborati per calcolare posizione, orientazione, velocità ed accelerazioni del veicolo rispetto ad un sistema di riferimento ad esso solidale, oppure fisso. In particolare, il dispositivo per la misura dell angolo volante può comprendere una telecamera e un insieme di marker solidali al volante (o di punti caratteristici del volante). In alternativa, il dispositivo per la misura dell angolo volante può comprendere una seconda piattaforma inerziale solidale al volante per misurare la rotazione del volante. Un ulteriore scopo della presente invenzione è quello di realizzare il rilevamento del moto di un veicolo e la stima dell angolo di assetto con una strumentazione che preveda un costo ridotto. In particolare è possibile pensare di utilizzare per le misure un normale telefono cellulare smartphone (o tablet) dotato di una IMU e di un ricevitore GPS e una telecamera o un secondo telefono cellulare (o 7
10 tablet) utilizzato come videocamera o come dispositivo per la misura dell angolo volante solidale al volante. Le grandezze cinematiche suddette saranno visualizzabili, eventualmente in tempo reale, sotto forma di grafici in funzione del tempo oppure attraverso opportuni indicatori, tramite un applicazione sviluppata per dispositivi mobili (smartphone o tablet) e potranno essere salvate su scheda di memora esterna (ad esempio microsd) per successive fasi di elaborazione personalizzate in ambienti esterni. Breve descrizione delle figure Ulteriori caratteristiche e vantaggi dell invenzione appariranno dalla descrizione dettagliata che segue, effettuata a puro titolo di esempio non limitativo, con riferimento ai disegni allegati, i cui: - la Figura 1 mostra un esempio di veicolo dotato di un sistema di misura secondo l invenzione, - la Figura 2 mostra un esempio di volante con i marker predisposti per il tracking di posizione, - la Figura 3 e la Figura 4 mostrano un esempio di un possibile modello cinematico di veicolo e un esempio di un possibile modello dinamico a bicicletta, - le Figure 5a e 5b mostrano una sequenza delle fasi di elaborazione e filtraggio dei segnali, - la Figura 6 mostra un esempio di predisposizione della telecamera all interno del veicolo, e - la Figura 7 mostra un ulteriore esempio di volante con i marker predisposti per il tracking di posizione. Descrizione particolareggiata Nella seguente descrizione sono illustrati vari dettagli specifici finalizzati ad una approfondita comprensione di esempi di una o più forme di attuazione. 8
11 Le forme di attuazione possono essere realizzate senza uno o più dei dettagli specifici, o con altri metodi, componenti, materiali ecc. In altri casi, strutture, materiali o operazioni noti non sono mostrati o descritti in dettaglio per evitare di rendere oscuri vari aspetti delle forme di attuazione. Il riferimento ad una forma di attuazione nell ambito di questa descrizione sta ad indicare che una particolare configurazione, struttura o caratteristica descritte in relazione alla forma di attuazione è compresa in almeno una forma di attuazione. Quindi, frasi come in una forma di attuazione, eventualmente presenti in diversi luoghi di questa descrizione, non sono necessariamente riferite alla stessa forma di attuazione. Inoltre, particolari conformazioni, strutture o caratteristiche possono essere combinati in un modo adeguato in una o più forme di attuazione. I riferimenti qui utilizzati sono soltanto per comodità e non definiscono dunque l ambito di tutela o la portata delle forme di attuazione. La soluzione qui proposta segue l ultima impostazione indicata nella descrizione della tecnica nota (metodologia ibrida d)) adottando per l analisi del segnale una soluzione ibrida che prevede sia un modello cinematico che un modello dinamico a bicicletta per creare l algoritmo di stima dell angolo di assetto. Il sistema proposto è rappresentato schematicamente nella Figura 1 ed è composto da: - una piattaforma inerziale (IMU), indicata in Figura 1 con il riferimento 1, ad esempio basata ad esempio su un sensore MEMS (Micro-Electro-Mechanical Systems), in grado di fornire dati di accelerazione, velocità angolare e campo magnetico, 9
12 - un dispositivo GPS, indicato in Figura 1 con il riferimento 2, che fornisce il segnale di posizione e velocità lineare, - una telecamera, indicata in Figura 1 con il riferimento 3, per inquadrare un volante V, - un insieme di marker MK solidali al volante V e posizionati in maniera tale da essere visibili dalla telecamera 3, e - un unità di calcolo, non illustrata nella Figura 1, in grado di elaborare i segnali acquisiti dai sensori 1,2 e 3 secondo l algoritmo descritto nel seguito. La piattaforma inerziale IMU 1 e il dispositivo GPS 2 sono comunemente presenti nei cellulari e nei tablet di ultima generazione, ovvero sono a disposizione di ogni utente a costo zero. Nel sistema sopra descritto, la telecamera 3 osserva il moto dei marker MK fissati sul volante V e rileva l evoluzione nel tempo dell angolo volante. All insieme di marker MK viene associato in un passo iniziale un sistema di assi di riferimento solidale alla figura geometrica descritta dai marker MK stessi (vedere Figura 2). Mediante osservazione del sistema di marker MK con la telecamera 3 si determina l orientazione del sistema di riferimento solidale ai marker MK rispetto ad un sistema di riferimento solidale alla telecamera 3, nei successivi fotogrammi di ripresa video. Assunta una orientazione del sistema di assi dei marker MK come configurazione di riferimento dell angolo volante, l orientazione dello stesso sistema di assi per differenti posizioni angolari del volante costituisce la misura di angolo volante richiesta. 10
13 La Figura 2 mostra un possibile esempio di realizzazione del sistema di marker MK. La disposizione dei marker MK e la loro forma illustrati nella Figura 2 sono solamente a titolo di esempio non limitativo. In particolare la forma dei marker MK può essere rotonda, come illustrato in Figura 2, oppure diversa, ad esempio rettangolare o quadrata, o costituire una unica banda circolare da applicare sulla corona C del volane V. In alternativa i marker MK possono essere sostituiti da una immagine, quale ad esempio un codice QR. I marker MK possono essere monocromatici o usare più colori. Ad esempio nel caso di una unica banda circolare si può avere una scala cromatica. Infine, i marker MK possono essere disposti come illustrato in Figura 2, o in un qualsiasi modo che permetta di individuare lo spostamento angolare del volante V tra un fotogramma e il successivo, inquadrati dalla telecamera 3. Sempre nella Figura 2, la telecamera 3 è stata illustrata agganciata al poggiatesta del sedile dal lato guidatore. In alternativa può essere attaccata al soffitto dell abitacolo, ad esempio con mezzi ad aggancio come Velcro o simili. In forme di attuazione alternative è possibile pensare di attaccare la telecamera 3 in modo da inquadrare il volante dalla parte posteriore. In questo caso la telecamera 3 potrebbe essere attaccata al cruscotto, alla plancia o al parabrezza come il dispositivo Telepass. In questo caso anche il sistema di marcatori MK dovrebbe essere posizionato sulla parte 11
14 posteriore del volante V, ovvero la parte inquadrata dalla telecamera 3. In alterativa alla telecamera 3, è possibile utilizzare come dispositivo per la misura dell angolo volante una seconda piattaforma inerziale solidale al volante (ad esempio un cellulare smartphone). Ai fini dell elaborazione dei segnali si utilizza un algoritmo basato sui modelli di veicolo descritti qui di seguito. Un possibile modello cinematico di veicolo utilizzato è descritto nella Figura 3. Un possibile modello dinamico a bicicletta utilizzato è descritto nella Figura 4. Il modello cinematico descritto nella Figura 3, che rappresenta il moto di un corpo rigido che si muove su di un piano orizzontale XY, permette di mettere in relazione le componenti longitudinale e trasversale della velocità assoluta del baricentro del veicolo, espresse in un sistema di riferimento solidale al veicolo stesso, con le rispettive componenti, longitudinale e laterale, della accelerazione assoluta del baricentro del veicolo, espresse nel medesimo sistema di riferimento, e con la velocità di imbardata. A valle di un procedimento noto di discretizzazione le relazioni tra le grandezze citate sono espresse dall equazione (1) I simboli in Figura 3 e nell equazione (1) hanno i seguenti significati: - : componente longitudinale della velocità del veicolo, 12
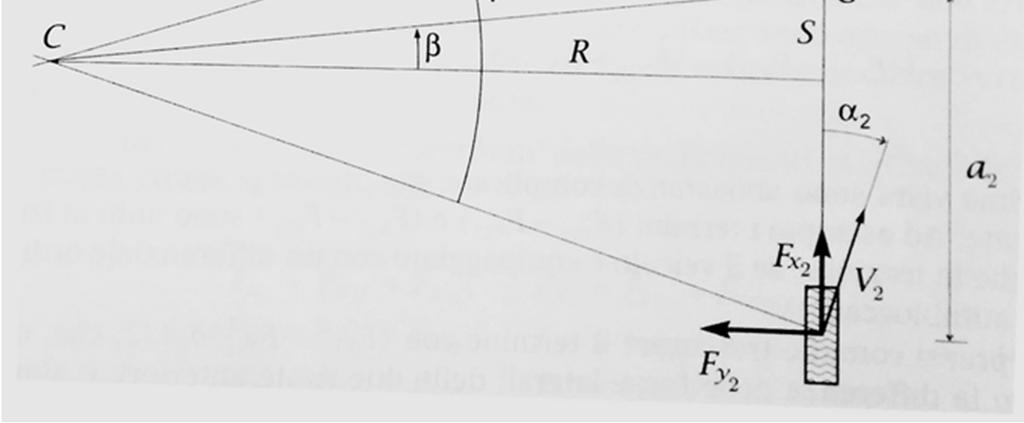
15 veicolo, e di dati. - : componente trasversale della velocità del - : accelerazione longitudinale del veicolo, - : accelerazione laterale del veicolo, - : periodo di campionamento dei dati acquisiti, - : indice che individua l elemento nel vettore Il modello dinamico descritto nella Figura 4 mette in relazione la velocità laterale e la velocità d imbardata del veicolo con la sua velocità longitudinale e l angolo di sterzo. A valle di un procedimento noto di linearizzazione e discretizzazione le relazioni sono espresse dall equazione: (2) I simboli in Figura 4 e nell equazione (2) hanno i seguenti significati: -, : semipassi anteriore e posteriore del veicolo; -, : velocità dei centri ruota dell assale anteriore e di quello posteriore; -, : angoli di deriva dell assale anteriore (1) e posteriore (2); - : baricentro del veicolo; - : raggio di curvatura della traiettoria; -, : forze longitudinali, rispetto ad un sistema di riferimento solidale alla ruota, sviluppate dagli pneumatici dell assale anteriore (1) e di quello posteriore (2); -, : forze laterali sviluppate dagli pneumatici dell assale anteriore (1) e di quello posteriore (2); 13
16 -,,,,,,,,, : coefficienti che dipendono dai parametri meccanici e geometrici del veicolo e dalle condizioni iniziali degli stati. I modelli cinematico e dinamico descritti sono utilizzati per ottenere una stima accurata della velocità trasversale e dell angolo di assetto attraverso due successive applicazioni dell algoritmo di filtraggio noto come filtro di Kalman. Come mostrato nelle Figure 5a e 5b, la sequenza di operazioni necessaria a calcolare con sufficiente accuratezza le grandezze cinematiche del veicolo è descritta qui di seguito. Fase 1 misura dai sensori (vedere nella Figura 5a grandezze con pedice s indicate nel loro insieme con GS) delle componenti di accelerazione assoluta del veicolo, della sua velocità angolare e della sua velocità lineare assoluta. La misura delle componenti dell accelerazione e della velocità angolare sono effettuate in un sistema di riferimento solidale ai sensori e sono relative al punto di installazione della piattaforma inerziale sul veicolo, che è in generale diverso dal baricentro della vettura. Fase 2 misura tramite un sensore non invasivo, ad esempio una telecamera, dell angolo volante indicato come. È importante prevedere un metodo di sincronizzazione dei dati provenienti potenzialmente da sistemi di acquisizione differenti (IMU 1 e telecamera 3). Un trigger comune ai vari sistemi di acquisizione, che può essere generato ad esempio dalla pressione di un tasto sull interfaccia grafica, e che inneschi l inizio delle acquisizioni e l impostazione della stessa frequenza di acquisizione, garantiscono un livello di accuratezza adeguato. 14
17 Fase 3 trasposizione delle componenti di accelerazione e di velocità angolare in un sistema di riferimento solidale al veicolo (vedere nella Figura 5a grandezze con pedice v indicate nel loro insieme con GV), in cui per esempio l asse x sia parallelo all asse longitudinale del veicolo, l asse y parallelo all asse trasversale del veicolo e l asse z perpendicolare ai precedenti a formare una terna destrorsa. La trasposizione è effettuata applicando le equazioni fondamentali della cinematica dei corpi rigidi. La piattaforma inerziale IMU 1 è in generale installata ad una certa distanza dal baricentro G della vettura e posizionata con una certa orientazione nello spazio. La posizione e l orientazione relativa dei sistemi di riferimento veicolo e sensore IMU possono essere efficacemente descritte attraverso una matrice di trasformazione di dimensione 4x4 contenente i coseni direttori del sistema di riferimento sensore rispetto al sistema di riferimento veicolo nella porzione 3x3 in alto a sinistra, e le coordinate dell origine del sistema di riferimento sensore (xs,ys,zs) rispetto al sistema di riferimento veicolo nella porzione 3x1 in alto a destra. (3) L equazione (3) consente di convertire un vettore posizione, espresso nel sistema di riferimento sensore (in cui vengono effettuate le misure), in un vettore posizione, espresso nel sistema di 15
18 riferimento veicolo (centrato nel baricentro G e con gli assi solidali al telaio del veicolo) rispetto al quale vengono riportate le grandezze cinematiche. I parametri di installazione della piattaforma inerziale IMU, cioè la sua posizione (coordinate xs,ys,zs rispetto al sistema di riferimento veicolo) ed orientazione (angoli di Eulero oppure coseni direttori), vanno individuati durante la fase di inizializzazione del sistema. È possibile utilizzare parametri preimpostati, ovvero richiedere all utilizzatore di indicare la posizione della IMU 1 rispetto al baricentro G del veicolo. Questa seconda ipotesi permette di migliorare la precisione della stima dei parametri di cinematica del veicolo, ma comporta una maggiore complessità di installazione. L orientazione degli assi viene individuata automaticamente mediante un procedimento di autoapprendimento basato su un algoritmo di ottimizzazione. Questo algoritmo è noto e comunemente utilizzato per l inizializzazione di sensori inerziali e consta dei seguenti passi: - acquisizione delle tre componenti di accelerazione dalla IMU 1, installata sul veicolo nella sua posizione definitiva, durante una prova statica con l automobile ferma su strada piana. In questo modo, l accelerazione misurata dalla IMU 1 è semplicemente l accelerazione di gravità di modulo g e diretta perpendicolarmente al piano stradale; 16
19 - calcolo del valore medio delle tre componenti di accelerazione misurate durante la prova suddetta in modo da limitare l effetto del rumore di misura; - esecuzione dell algoritmo di ottimizzazione che impiega come funzione obiettivo la norma due dell errore di stima tra l accelerazione misurata, riportata mediante la matrice di rotazione (che è una funzione non lineare degli angoli di Eulero incogniti) al sistema di riferimento veicolo, e quella vera, cioè (0,0,-g); - gli output dell algoritmo sono la matrice di trasformazione e i tre angoli di Eulero che minimizzano l errore di stima ed il valore della funzione obiettivo nonché le ragioni che hanno determinato la fine del processo di ottimizzazione. Si passa poi alla elaborazione delle accelerazioni misurate. Per ottenere l accelerazione del centro di massa del veicolo note le accelerazioni misurate dai sensori si effettuano due passaggi: - applicazione della matrice di rotazione alla misura dei sensori per passare dal sistema di riferimento sensore ad un sistema di riferimento con gli assi allineati al sistema di riferimento veicolo; la matrice di rotazione è la porzione 3x3 in alto a sinistra della matrice di trasformazione, ed è così calcolabile: dove,, sono gli angoli di Eulero del sistema di riferimento sensore rispetto al sistema di riferimento veicolo. La matrice di rotazione suddetta è completamente nota una volta portata a termine la fase 17

20 di inizializzazione del sistema, come descritto più sopra; - calcolo dell accelerazione del baricentro a partire dalla accelerazione misurata nel punto di installazione del sensore IMU 1, che in generale non è coincidente con il baricentro G. Questo secondo passaggio viene effettuato per mezzo dell equazione fondamentale della cinematica dei corpi rigidi espressa in termini di accelerazione, anche nota con il nome di Formula di Rivals: (4) che lega le accelerazioni e di due punti p1 e p2 appartenenti allo stesso corpo rigido (dotato di velocità ed accelerazione angolare e, e con un vettore di posizione relativa ; la relazione precedente può essere esplicitata in funzione delle misure disponibili, delle grandezze calcolabili o dei parametri noti come segue: 18 (5) dove compaiono: le coordinate di installazione del sensore IMU 1, indicate come Xs, Ys e Zs, le componenti di velocità angolare del veicolo,, e le relative accelerazioni; inoltre, e sono rispettivamente l accelerazione del baricentro G del veicolo e l accelerazione nel punto di installazione del sensore IMU 1. Le tre componenti della velocità angolare misurate dal giroscopio (gyrox, gyroy, gyroz) vanno riportate alle componenti di velocità angolare del veicolo,, per mezzo della matrice di rotazione,
21 identificata nella fase di inizializzazione, e della matrice di conversione delle componenti di velocità angolare rispetto agli assi del sistema di riferimento veicolo e le componenti di velocita angolare espresse come derivate degli angoli di Eulero, esplicitata in letteratura nota: Fase 4 applicazione dell algoritmo di filtraggio noto come filtro di Kalman al sistema cinematico descritto dall equazione (1), dove gli ingressi sono l accelerazione longitudinale a x e laterale a y del veicolo, gli stati sono la velocità longitudinale u e la velocità trasversale v espresse nel medesimo sistema di riferimento solidale al veicolo, e le misure sono l accelerazione longitudinale a x e laterale a y del veicolo, la sua velocità di imbardata e la sua velocità longitudinale, considerata coincidente col valore di velocità misurata da un sensore di posizione come ad esempio un sensore GPS 2 o similare. Al termine di questa fase è disponibile un valore sufficientemente affidabile per la velocità longitudinale u mentre il valore di velocità trasversale v deve essere ulteriormente affinato. Fase 5 - applicazione dell algoritmo di filtraggio noto come filtro di Kalman al sistema dinamico descritto dall equazione (2), dove gli ingressi sono la velocità longitudinale u stimata nella Fase 4, l angolo volante v misurato nella fase 2, gli stati sono la velocità trasversale v e la velocità di imbardata e le misure sono la velocità di imbardata misurata nelle Fasi 1 e 3, la velocità longitudinale 19
22 ottenuta in uscita dalla Fase 4 e l angolo volante misurato nella Fase 2. In uscita dalla Fase 5 sono disponibili valori sufficientemente accurati della velocità trasversale e della velocità di imbardata. Fase 6 calcolo dell angolo di assetto. L angolo di assetto è calcolato in funzione del valore di velocità longitudinale u ottenuto in uscita dalla Fase 4 e del valore di velocità trasversale v ottenuto in uscita dalla Fase 5 con l espressione: Lo schema funzionale di riferimento per le 6 Fasi descritte è indicato nella Figura 5, distinta in Figura 5a in cui si illustra il flusso di informazioni dai sensori fino alla visualizzazione tramite l APP delle grandezze dinamiche del veicolo e la Figura 5b che mostra la parte di algoritmo inerente i due filtri di Kalman in sequenza, il primo basato sul modello cinematico e il secondo su quello dinamico. La misura dell angolo volante è effettuata con un sensore non invasivo, ad esempio una fotocamera 3. Di seguito si descrive un possibile metodo per la misura dell angolo volante tramite una fotocamera 3. Come già detto in precedenza, la fotocamera 3 potrebbe essere una fotocamera di un cellulare o un tablet. Il sistema proposto, data anche la non eccessiva domanda di precisione della misura dell angolo volante richiesta dall algoritmo composto dalle Fasi da 1 a 6 descritte in precedenza, non implica manomissioni del sistema di sterzo o installazioni complesse, ma il semplice fissaggio di un opportuno insieme di marker MK sul volante; a solo titolo di esempio tale insieme 20
23 può essere costituito da un opportuno numero di marker MK fissati al volante oppure da un disco sottile con marker MK riportati in superficie a sua volta fissato al centro del volante V. La disposizione del sistema di marker MK è effettuato in modo che essi possano essere ripresi da una telecamera 3 fissata in posizione non invasiva. Un metodo di misura analogo è presentato nel documento Steering wheel s angle tracking from cameracar, Conference Paper, DOI: /IVS , Conference: Intelligent Vehicles Symposium, Proceedings. IEEE, in cui però la sua possibile applicazione alla stima dell angolo di assetto non viene menzionata. Il sistema qui proposto ha la finalità di rilevare il moto di un autoveicolo senza richiedere alcuna tipologia di interfacciamento con la rete informatica della vettura (rete CAN) e senza richiedere l installazione di sensori che possano risultare invasivi per la guida quale, ad esempio, il volante sensorizzato. Ai fini di identificare il sistema di riferimento solidale ai marker MK e misurare la rotazione del volante V si esegue, ad esempio, il processo descritto dalle seguenti fasi: Fase a): col volante V in posizione di rotazione nulla si acquisisce un primo fotogramma; Fase b): viene individuata la posizione all interno del fotogramma di ciascun marker MK. La posizione è definita in un sistema di riferimento individuato dalla matrice di pixel del sensore della fotocamera 3. La posizione è definita dalla matrice X 1 ; 21
24 Fase c): senza spostare la fotocamera 3 si acquisisce un secondo fotogramma; Fase d): viene individuata la posizione all interno del fotogramma di ciascun marker MK. La posizione è definita in un sistema di riferimento individuato dalla matrice di pixel del sensore della fotocamera 3 ed è individuata dalla matrice X k+1 ; Fase e): al fine di annullare l effetto di eventuali traslazioni relative della fotocamera 3 rispetto al set di marker MK si calcola la matrice di traslazione ottimale T k+1, definita come la matrice di traslazione che unisce i centroidi delle figure individuate dai marker MK nei due fotogrammi successivi; Fase f): si calcola la matrice X k+1,c rappresentativa della posizione della figura determinata dai marker MK all istante k+1 traslata fino a che il suo centroide coincida con quello della figura rilevata all istante k. La posizione è individuata dalla matrice X k+1,c =X k -T k+1 ; Fase g): si calcola la matrice di rotazione ottimale R che riporta la figura individuata dai marker MK nel fotogramma k a sovrapporsi a quella individuata nel fotogramma k minimizzando l espressione, La matrice R fornisce l angolo di rotazione tra l istante k e l istante k; Fase h): la rotazione totale è calcolata come sommatoria delle rotazioni rilevate tra un istante e il successivo. Le fasi da b) a h) sono ripetute durante l intero periodo di misura. 22
25 Indipendentemente dalla posizione di fissaggio della piattaforma IMU 1 e del dispositivo GPS 2 rispetto al veicolo, i valori di accelerazione assoluta e di velocità angolare del veicolo provenienti dalla IMU 1, espressi in un sistema di riferimento solidale alla IMU 1 stessa, e i valori di posizione e velocità assolute del veicolo provenienti dal GPS 2 sono elaborati per calcolare velocità lineare e angolare ed accelerazioni lineari del veicolo rispetto ad un sistema di riferimento ad esso solidale. L insieme dei dati rilevati (angolo volante, accelerazione lineare longitudinale, laterale e verticale, posizione, velocità di imbardata e velocità lineare del veicolo) sono elaborati attraverso una serie di filtri di Kalman in cascata allo scopo di descrivere lo stato di moto del veicolo, ricostruire la traiettoria e stimare in ogni istante il suo angolo di assetto. L hardware necessario alla realizzazione del sistema è reperibile sul mercato al costo complessivo di circa 300 (150 IMU, ad esempio Soc Robotics IMU 8420, action camera, ad esempio GoPro modello Hero Session ) oppure è comunemente contenuto all interno di uno smartphone. È possibile sviluppare un applicazione idonea ad applicare gli algoritmi di analisi dei segnali provenienti dai sensori direttamente su un telefono cellulare. In alternativa è possibile concentrare l hardware (IMU 1 + GPS 2) all interno di un contenitore di piccole dimensioni, paragonabili a quelle di un rilevatore Telepass, che potrebbe essere applicato al parabrezza oppure fissato al cruscotto. 23
26 La telecamera 3 è invece fissata in modo da riprendere senza eccessive distorsioni il volante V, ad esempio può essere installata sul poggiatesta del sedile lato guidatore, come illustrato in Figura 6, al fine di avere un immagine chiara dei marker MK, come illustrato a titolo di esempio in Figura 7. In varie forme di attuazione alternative la telecamera 3 può essere posizionata sul parabrezza o sul cruscotto e inquadrare il volante V dal retro. In alternativa la telecamera 3 può essere ancorata al soffitto del veicolo. Come già anticipato è possibile prevedere delle forme di attuazione in cui si utilizzano due smartphone, uno solidale al volante V per misurare la rotazione del volante V e uno posto all interno dell abitacolo in posizione prossima al volante, ma non rotante con esso (ad esempio sul cruscotto nello spazio compreso tra il volante e gli indicatori di velocità e numero di giri del motore) per misurare le accelerazioni del veicolo. In questa applicazione i dati provenienti dai due smartphone devono essere raccolti, ad esempio tramite comunicazione Bluetooth, da uno dei due che agirà da master. Una possibile procedura di misura dell angolo volante è descritta nelle seguenti fasi: Fase F1: si identificano le matrici che descrivono l orientamento dei due telefoni quando il volante V è diritto. Queste matrici sono determinate secondo la procedura descritta in precedenza (vedere pagina 20 e successive). 24
27 Fase F2: mantenendo la vettura ferma si eseguono alcune manovre di rotazione del volante V e si identifica il suo asse di rotazione Fase F3: si legge il valore di velocità angolare misurato dai sensori giroscopici dei due smartphone. Fase F4: si riferisce al sistema di riferimento del telefono solidale al veicolo la misura della componente della velocità angolare diretta secondo l asse di rotazione del volante V del telefono solidale al volante V. Fase F5: la velocità di rotazione del volante V viene calcolata sottraendo al valore di velocità angolare secondo la direzione dell asse di rotazione del volante V, misurato dal telefono solidale al volante V, la componente di velocità angolare nella medesima direzione misurata dal telefono solidale al veicolo. Fase F6: la posizione angolare del volante viene calcolata per integrazione nel tempo del valore di velocità angolare ricavato nella fase F5. Le fasi da F3 a F6 sono ripetute per tutto il tempo della misura. I due smartphone possono essere sostituiti da due sensori giroscopici opportunamente montati e collegati a un opportuna unità di calcolo. Un ulteriore algoritmo per la misura dell angolo di assetto utilizzando due smartphone, di cui uno solidale al veicolo e uno solidale al volante V è basato sul confronto delle misure di accelerazione effettuate dai sensori dei due smartphone è descritto nel seguito: Fase G1: si identificano le matrici che descrivono l orientamento dei due telefoni quando il volante V è diritto. Queste matrici sono determinate secondo la 25
28 procedura descritta in precedenza (vedere pagina 20 e successive). Fase G2: mantenendo la vettura ferma si eseguono alcune manovre di rotazione del volante V e si identifica il suo asse di rotazione. Fase G3: si misura il vettore accelerazione con i sensori di entrambi i telefoni. Fase G4: il segnale misurato dai sensori di uno dei due smartphone è trasmesso, ad esempio tramite Bluetooth, all altro smartphone che assume il ruolo di master. Fase G5: si individua la matrice di rotazione che permette di ottenere la migliore sovrapposizione tra i segnali misurati dal sensore solidale al veicolo e da quello solidale al volante V. Fase G6: in funzione della matrice di rotazione individuata nella fase G4 si determina la rotazione del volante avvenuta intorno al suo asse di rotazione individuato nella fase G2. Le fasi da G3 a G6 sono ripetute con continuità per tutta la durata del periodo in cui si intende misurare l angolo volante. Diversamente, è possibile prevedere l uso dei due cellulari in cui il primo misura le accelerazioni e il secondo funge da telecamera. Come già detto in precedenza, i marker MK possono essere di diversi colori, o posti in diverse posizioni sul volante V, e in varie forme di attuazione possono essere una striscia in scala cromatica di colori o una immagine, ad esempio una immagine QR. Inoltre, i marker MK possono essere disposti sulla parte centrale del volante V (come illustrato nella 26
29 Figura 2) oppure sulla corona del volante V (davanti o dietro a seconda della posizione della telecamera 3). II dispositivo proposto risolve il problema di effettuare misure dinamiche del moto di un veicolo utilizzando hardware a basso costo e tipicamente contenuto in un cellulare o smartphone senza richiedere l installazione di ulteriori sensori specifici né l interfacciamento col sistema informatico di bordo veicolo per accedere a dati misurati dai sensori del veicolo. La principale caratteristica innovativa è costituita dalla possibilità di misurare lo stato del veicolo e in particolare l angolo di assetto senza applicare sensori invasivi, come ad esempio il volante sensorizzato, e senza utilizzare dati provenienti dai sistemi di bordo del veicolo. Questo comporta che il sistema possa essere posizionato sul veicolo senza richiedere una fase di installazione, ma semplicemente fissandolo in una posizione opportuna sul parabrezza, ad esempio con un nastro biadesivo, e incollando l insieme dei marker MK al volante utilizzando ancora una volta, ad esempio, un nastro biadesivo. È inoltre ipotizzabile che l angolo di rotazione del volante sia misurato mediante il tracking di suoi punti caratteristici (ad esempio la posizione delle razze) senza richiedere l apposizione di marker MK specifici. I vantaggi rispetto alle tecnologie esistenti sono: - non invasività del sistema e assenza di qualsiasi interferenza con i comandi, 27
30 - assenza di procedure di installazione che richiedano interventi sul veicolo, - utilizzo di hardware a basso costo, - possibilità di utilizzare l hardware di uno smartphone per la misura delle grandezze fisiche. Naturalmente, fermo restando il principio dell invenzione, le forme di attuazione ed i particolari di realizzazione potranno essere ampiamente variati rispetto a quanto è stato descritto ed illustrato a puro titolo di esempio non limitativo, senza per questo uscire dall ambito di protezione della presente invenzione definito dalle rivendicazioni allegate. 28
31 RIVENDICAZIONI 1) Sistema, installabile su di un veicolo, comprendente un dispositivo dotato di una piattaforma inerziale IMU (1), atta a fornire dati di accelerazione, velocità angolare e campo magnetico, e di un dispositivo di localizzazione (2), atto a fornire un segnale di posizione e velocità lineare, il sistema comprende inoltre un dispositivo per la misura dell angolo volante, in cui i dati provenienti dalla piattaforma inerziale IMU (1) e dal dispositivo di localizzazione (2) sono elaborati attraverso filtri di Kalman posti in cascata per calcolare i parametri cinematici del veicolo. 2) Sistema, secondo la rivendicazione 1, in cui detto dispositivo per la misura dell angolo volante comprende una telecamera (3) atta ad inquadrare il volante (V) del veicolo per il tracking dei punti caratteristici del volante (V) e/o di marker (MK) disposti sul volante (V). 3) Sistema secondo la rivendicazione 1, in cui detto dispositivo per la misura dell angolo volante comprende una seconda piattaforma inerziale IMU solidale al volante (V) per misurare la rotazione del volante (V). 4) Sistema secondo una qualsiasi delle precedenti rivendicazioni, in cui detta piattaforma inerziale IMU (1) è basata su un sensore MEMS. 5) Sistema secondo la rivendicazione 3 e la rivendicazione 4, in cui detta seconda piattaforma inerziale IMU solidale al volante (V) è basata su un sensore MEMS. 29
32 6) Sistema secondo una qualsiasi delle precedenti rivendicazioni, in cui detto dispositivo di localizzazione (2) è un ricevitore GPS. 7) Sistema secondo una qualsiasi delle rivendicazioni precedenti, in cui detta piattaforma inerziale IMU (1) e detto dispositivo di localizzazione (2) sono assemblati in un unico dispositivo. 8) Sistema secondo la rivendicazione 7, in cui detto dispositivo è un cellulare tipo smartphone o un tablet. 9) Sistema secondo la rivendicazione 2, in cui detta telecamera (3) è agganciata: - al poggiatesta del sedile dal lato guidatore, o - al soffitto dell abitacolo del veicolo, o - al cruscotto, o - alla plancia, o - al parabrezza, in modo tale da inquadrare il volante (V). 10) Sistema secondo una qualsiasi delle rivendicazioni precedenti, in cui detti parametri cinematici calcolati comprendono angolo volante, accelerazione longitudinale, accelerazione laterale e accelerazione verticale, posizione, velocità di imbardata e velocità del veicolo. 11) Sistema secondo la rivendicazione 10, in cui tali parametri cinematici vengono usati per descrivere lo stato di moto del veicolo e ricostruire la traiettoria e stimare in ogni istante il suo angolo di assetto. 12) Sistema secondo una qualsiasi delle rivendicazioni precedenti, in cui ai dati provenienti dalla piattaforma inerziale IMU (1) e dal dispositivo di localizzazione (2) sono applicati in sequenza un 30
33 modello cinematico e un modello dinamico per ottenere una stima accurata della velocità trasversale e dell angolo di assetto. 13) Metodo per calcolare i parametri cinematici di un veicolo comprendente le fasi di: - predisporre all interno del veicolo un dispositivo dotato di una piattaforma inerziale IMU (1), in grado di fornire dati di accelerazione, velocità angolare e campo magnetico, - predisporre all interno del veicolo un dispositivo di localizzazione (2), in grado di fornire un segnale di posizione e velocità lineare, - predisporre all interno del veicolo un dispositivo per la misura dell angolo volante, - misurare dati relativi al veicolo tramite detta piattaforma inerziale IMU (1) e detto dispositivo di localizzazione (2), - elaborare detti dati misurati attraverso filtri di Kalman posti in cascata per calcolare detti parametri cinematici del veicolo. 14) Metodo secondo la rivendicazione 13, in cui detto dispositivo per la misura dell angolo volante comprende una telecamera (3) atta ad inquadrare il volante (V) del veicolo per il tracking dei punti caratteristici del volante (V) e/o di marker (MK) disposti sul volante (V). 15) Metodo secondo la rivendicazione 13, in cui detto dispositivo per la misura dell angolo volante comprende una seconda piattaforma inerziale IMU solidale al volante (V) per misurare la rotazione del volante (V). 16) Metodo secondo una qualsiasi delle rivendicazioni 13 a 15, in cui il primo di detti filtri 31
34 di Kalman è basato sul modello cinematico e il secondo di detti filtri di Kalman è basato sul modello dinamico. 17) Metodo secondo la rivendicazione 16, in cui è prevista una fase di inizializzazione di sensori inerziali che comprende i seguenti passi: - acquisizione delle tre componenti di accelerazione dalla piattaforma inerziale IMU (1), installata sul veicolo nella sua posizione definitiva, durante una prova statica con l automobile ferma su strada piana, - calcolo del valore medio delle tre componenti di accelerazione misurate durante la prova suddetta in modo da limitare l effetto del rumore di misura; - esecuzione di un algoritmo di ottimizzazione che impiega come funzione obiettivo la norma due dell errore di stima tra l accelerazione misurata e quella vera; - gli output dell algoritmo di ottimizzazione sono la matrice di rotazione (M) e i tre angoli di Eulero che minimizzano l errore di stima ed il valore della funzione obiettivo nonché le ragioni che hanno determinato la fine del processo di ottimizzazione. 18) Metodo secondo la rivendicazione 17, in cui dopo detta fase di inizializzazione sono previste le seguenti fasi: - Fase 1 misurare tramite detta piattaforma inerziale IMU (1) e detto dispositivo di localizzazione (2) le componenti di accelerazione assoluta del veicolo, la velocità angolare e la velocità lineare assoluta in cui la misura delle componenti dell accelerazione e della velocità angolare sono effettuate in un sistema di riferimento solidale alla piattaforma inerziale IMU (1) e a detto dispositivo di 32
35 localizzazione (2) e sono relative al punto di installazione della piattaforma inerziale IMU (1) sul veicolo, che è in generale diverso dal baricentro (G) della vettura; - Fase 2 misura dell angolo volante tramite detto dispositivo per la misura dell angolo volante; - Fase 3 trasposizione delle componenti di accelerazione e di velocità angolare in un sistema di riferimento solidale al veicolo in cui la trasposizione è effettuata applicando le equazioni fondamentali della cinematica dei corpi rigidi; - Fase 4 applicazione dell algoritmo di filtraggio noto come filtro di Kalman al sistema cinematico; - Fase 5 - applicazione dell algoritmo di filtraggio noto come filtro di Kalman al sistema dinamico; - Fase 6 calcolo dell angolo di assetto in funzione del valore di velocità longitudinale ottenuto in uscita dalla Fase 4 e del valore di velocità trasversale ottenuto in uscita dalla Fase 5. 19) Kit per misurare i parametri cinematici di un veicolo comprendente: - un primo dispositivo dotato di una piattaforma inerziale IMU (1) e un dispositivo di localizzazione (2), da predisporre all interno del veicolo per fornire dati di accelerazione, velocità angolare, campo magnetico, e un segnale di posizione e velocità lineare, e - un secondo dispositivo per la misura dell angolo volante. 20) Kit secondo la rivendicazione 19, in cui detto dispositivo per la misura dell angolo volante comprende 33
36 una telecamera (3) atta ad inquadrare il volante (V) del veicolo per il tracking dei punti caratteristici del volante (V). 21) Kit secondo la rivendicazione 19, comprendente dei marker (MK) atti ad essere disposti sul volante (V). 22) Kit secondo la rivendicazione 19, in cui detto dispositivo per la misura dell angolo volante comprende una seconda piattaforma inerziale IMU solidale al volante (V) per misurare la rotazione del volante (V). 23) Kit secondo una qualsiasi delle rivendicazioni 19 a 22, in cui detto primo e detto secondo dispositivo sono dei telefoni cellulari e/o dei tablet. 34


37 3 MK V 1 G 2 Fig. 1



38 V MK Fig. 2
39 Fig. 3

40 Fig. 4
41 GS GV Fig. 5a Fig. 5b


42 3 Fig. 6


43 Fig. 7
PROSPETTO MODULO A DOMANDA DI BREVETTO PER INVENZIONE INDUSTRIALE
 PROSPETTO MODULO A DOMANDA DI BREVETTO PER INVENZIONE INDUSTRIALE NUMERO DI DOMANDA: DATA DI DEPOSITO: 21 MARZO 07 A. RICHIEDENTE/I COGNOME E NOME O DENOMINAZIONE, RESIDENZA O STATO; - UNIVERSITÀ DEGLI
PROSPETTO MODULO A DOMANDA DI BREVETTO PER INVENZIONE INDUSTRIALE NUMERO DI DOMANDA: DATA DI DEPOSITO: 21 MARZO 07 A. RICHIEDENTE/I COGNOME E NOME O DENOMINAZIONE, RESIDENZA O STATO; - UNIVERSITÀ DEGLI
DESCRIZIONE. del brevetto per invenzione industriale dal titolo: METODO PER ASSOCIARE UNA IMMAGINE A UNA SEQUENZA DI
 DESCRIZIONE del brevetto per invenzione industriale dal titolo: METODO PER ASSOCIARE UNA IMMAGINE A UNA SEQUENZA DI PRESSIONI DI TASTI INSERITA TRAMITE UNA TASTIERA 1) ANGUSTI GIULIO di nazionalità italiana
DESCRIZIONE del brevetto per invenzione industriale dal titolo: METODO PER ASSOCIARE UNA IMMAGINE A UNA SEQUENZA DI PRESSIONI DI TASTI INSERITA TRAMITE UNA TASTIERA 1) ANGUSTI GIULIO di nazionalità italiana
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
MXL Pro PROVE SU PISTA ANALISI SOVRASTERZO E SOTTOSTERZO. Vettura: Sport ANALISI IN PISTA
 PROVE SU PISTA Sistema: MXL Pro + GPS Pista: Adria (RO) Vettura: Sport ANALISI IN PISTA Premessa Per le prove effettuate sono stati installati i seguenti sensori: GPS, 4 potenziometri ammortizzatori, potenziometro
PROVE SU PISTA Sistema: MXL Pro + GPS Pista: Adria (RO) Vettura: Sport ANALISI IN PISTA Premessa Per le prove effettuate sono stati installati i seguenti sensori: GPS, 4 potenziometri ammortizzatori, potenziometro
1 Schemi alle differenze finite per funzioni di una variabile
 Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Fondamenti di Meccanica Esame del
 Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Dispositivi Minimamente Invasivi
 Dispositivi Minimamente Invasivi per Diagnosi, Monitoraggio e Terapia Esercitazione 11 Nicola Carbonaro nicola.carbonaro@centropiaggio.unipi.it Sensori Inerziali Negli ultimi anni gli sviluppi tecnologici,
Dispositivi Minimamente Invasivi per Diagnosi, Monitoraggio e Terapia Esercitazione 11 Nicola Carbonaro nicola.carbonaro@centropiaggio.unipi.it Sensori Inerziali Negli ultimi anni gli sviluppi tecnologici,
RIVENDICAZIONI. 1. Metodo per associare una immagine a una sequenza di. pressioni di tasti inserita tramite una tastiera (2) avente
 avente") RIVENDICAZIONI 1. Metodo per associare una immagine a una sequenza di pressioni di tasti inserita tramite una tastiera (2) avente una disposizione di tasti determinata; il metodo comprendendo le fasi di:
RIVENDICAZIONI 1. Metodo per associare una immagine a una sequenza di pressioni di tasti inserita tramite una tastiera (2) avente una disposizione di tasti determinata; il metodo comprendendo le fasi di:
SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT
 SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
5a.Rotazione di un corpo rigido attorno ad un asse fisso
 5a.Rotazione di un corpo rigido attorno ad un asse fisso Un corpo rigido è un corpo indeformabile: le distanze relative tra i punti materiali che lo costituiscono rimangono costanti. Il modello corpo rigido
5a.Rotazione di un corpo rigido attorno ad un asse fisso Un corpo rigido è un corpo indeformabile: le distanze relative tra i punti materiali che lo costituiscono rimangono costanti. Il modello corpo rigido
IL GPS sistema di satelliti segmento di terra segnali elettromagnetici ricevitori
 IL GPS Il GPS Global Positioning System è costituito da un sistema di satelliti orbitanti all altezza di circa 20.000 km, controllati da un segmento di terra che ne determina con precisione le orbite.
IL GPS Il GPS Global Positioning System è costituito da un sistema di satelliti orbitanti all altezza di circa 20.000 km, controllati da un segmento di terra che ne determina con precisione le orbite.
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
MECCANICA APPLICATA ALLE MACCHINE Allievi meccanici AA prova del Problema N.1. Problema N.2
 MECCANICA APPLICATA ALLE MACCHINE Allievi meccanici AA.2011-2012 prova del 01-02-2013 Problema N.1 Il sistema meccanico illustrato in figura giace nel piano verticale. L asta AB con baricentro G 2 è incernierata
MECCANICA APPLICATA ALLE MACCHINE Allievi meccanici AA.2011-2012 prova del 01-02-2013 Problema N.1 Il sistema meccanico illustrato in figura giace nel piano verticale. L asta AB con baricentro G 2 è incernierata
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE
 MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
Video Parte 4a. Stabilizzazione. Multimedia
 Video Parte 4a Stabilizzazione Stabilizzazione Un sistema di stabilizzazione dell immagine ha come scopo quello di rimuovere i movimenti da una sequenza di immagini Padding: movimenti intenzionali Jitter:
Video Parte 4a Stabilizzazione Stabilizzazione Un sistema di stabilizzazione dell immagine ha come scopo quello di rimuovere i movimenti da una sequenza di immagini Padding: movimenti intenzionali Jitter:
, c di modulo uguale sono disposti in modo da formare un triangolo equilatero come mostrato in fig. 15. Si chiarisca quanto vale l angolo formato da
 22 Tonzig Fondamenti di Meccanica classica ta) Un esempio di terna destra è la terna cartesiana x, y, z [34] Per il prodotto vettoriale vale la proprietà distributiva: a ( b c) = a b a c, ma non vale la
22 Tonzig Fondamenti di Meccanica classica ta) Un esempio di terna destra è la terna cartesiana x, y, z [34] Per il prodotto vettoriale vale la proprietà distributiva: a ( b c) = a b a c, ma non vale la
Modello dinamico dei robot: approccio di Newton-Eulero
 Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Modellistica dei Manipolatori Industriali 01BTT Esame del 18/02/2002 Soluzione
 Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali 01BTT Esame del 23/11/2001 Soluzione
 Modellistica dei Manipolatori Industriali 1BTT Esame del 23/11/21 Soluzione 1 Sistemi di riferimento e cinematica di posizione In Figura 1 il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali 1BTT Esame del 23/11/21 Soluzione 1 Sistemi di riferimento e cinematica di posizione In Figura 1 il manipolatore è stato ridisegnato per mettere in evidenza variabili
Soluzione del Secondo Esonero A.A , del 28/05/2013
 Soluzione del Secondo Esonero A.A. 01-013, del 8/05/013 Primo esercizio a) Sia v la velocità del secondo punto materiale subito dopo l urto, all inizio del tratto orizzontale con attrito. Tra il punto
Soluzione del Secondo Esonero A.A. 01-013, del 8/05/013 Primo esercizio a) Sia v la velocità del secondo punto materiale subito dopo l urto, all inizio del tratto orizzontale con attrito. Tra il punto
viii Indice 1.10 Ruota con solo scorrimento rotatorioϕ(camber e/o imbardata) Spinta di camber (comportamento lineare) El
 Spinta di camber (comportamento lineare) El") Indice Prefazione xiii 1 Comportamento della ruota con pneumatico 1 1.1 Sistema di riferimento e azioni ruota-strada............. 2 1.2 Moto della ruota con pneumatico rispetto alla strada....... 5 1.2.1
Indice Prefazione xiii 1 Comportamento della ruota con pneumatico 1 1.1 Sistema di riferimento e azioni ruota-strada............. 2 1.2 Moto della ruota con pneumatico rispetto alla strada....... 5 1.2.1
CAMPO DELL INVENZIONE
 RIASSUNTO Dispositivo a sospensione progressiva (100) per la ruota posteriore (15) di un motoveicolo comprendente: - almeno una forcella (2) comprendente almeno una prima estremità (21) fulcrata al telaio
RIASSUNTO Dispositivo a sospensione progressiva (100) per la ruota posteriore (15) di un motoveicolo comprendente: - almeno una forcella (2) comprendente almeno una prima estremità (21) fulcrata al telaio
Lezione 7.1. Introduzione al filtro di Kalman. F. Previdi - Controlli Automatici - Lez. 7.1
 Lezione 7.1 Introduzione al filtro di Kalman 1 Schema della lezione 1. Filtraggio in senso stretto ed in senso lato 2. Introduzione alla teoria di Kalman Esempio 1 : controllo di portata in un dosatore
Lezione 7.1 Introduzione al filtro di Kalman 1 Schema della lezione 1. Filtraggio in senso stretto ed in senso lato 2. Introduzione alla teoria di Kalman Esempio 1 : controllo di portata in un dosatore
STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
 Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
MISURE MAGNETICO-MECCANICHE DEI QUADRUPOLI PERMANENTI DELLA ZONA DI INTERAZIONE FINUDA
 K K DAΦNE TECHNICAL NOTE INFN - LNF, Accelerator Division Frascati, April 3, 2000 Note: ME-10 MISURE MAGNETICO-MECCANICHE DEI QUADRUPOLI PERMANENTI DELLA ZONA DI INTERAZIONE FINUDA F. Sgamma, C. Sanelli,
K K DAΦNE TECHNICAL NOTE INFN - LNF, Accelerator Division Frascati, April 3, 2000 Note: ME-10 MISURE MAGNETICO-MECCANICHE DEI QUADRUPOLI PERMANENTI DELLA ZONA DI INTERAZIONE FINUDA F. Sgamma, C. Sanelli,
POLITECNICO DI TORINO Repository ISTITUZIONALE
 POLITECNICO DI TORINO Repository ISTITUZIONALE Esperienze di pianificazione spaziale europea Original Esperienze di pianificazione spaziale europea / Janin Rivolin, Umberto. - ELETTRONICO. - (2016), pp.
POLITECNICO DI TORINO Repository ISTITUZIONALE Esperienze di pianificazione spaziale europea Original Esperienze di pianificazione spaziale europea / Janin Rivolin, Umberto. - ELETTRONICO. - (2016), pp.
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria
 UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello DM 509/99 e DM 270/04 e Diploma Universitario)
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello DM 509/99 e DM 270/04 e Diploma Universitario)
POLITECNICO DI TORINO Repository ISTITUZIONALE
 POLITECNICO DI TORINO Repository ISTITUZIONALE Sistemi geotermici a bassa entalpia a ciclo aperto: modellazione dell'impatto termico nel sottosuolo Original Sistemi geotermici a bassa entalpia a ciclo
POLITECNICO DI TORINO Repository ISTITUZIONALE Sistemi geotermici a bassa entalpia a ciclo aperto: modellazione dell'impatto termico nel sottosuolo Original Sistemi geotermici a bassa entalpia a ciclo
POLITECNICO DI TORINO Repository ISTITUZIONALE
 POLITECNICO DI TORINO Repository ISTITUZIONALE Elementi di Ingegneria delle Terapie Termiche Original Elementi di Ingegneria delle Terapie Termiche / Lucia, Umberto. - STAMPA. - (2017), pp. 1-131. Availability:
POLITECNICO DI TORINO Repository ISTITUZIONALE Elementi di Ingegneria delle Terapie Termiche Original Elementi di Ingegneria delle Terapie Termiche / Lucia, Umberto. - STAMPA. - (2017), pp. 1-131. Availability:
Esempio di applicazione del principio di d Alembert: determinazione delle forze di reazione della strada su un veicolo.
 Esempio di applicazione del principio di d Alembert: determinazione delle forze di reazione della strada su un veicolo. C Si consideri il veicolo rappresentato in figura per il quale valgono le seguenti
Esempio di applicazione del principio di d Alembert: determinazione delle forze di reazione della strada su un veicolo. C Si consideri il veicolo rappresentato in figura per il quale valgono le seguenti
"Match analysis, GPS, potenza metabolica: le bugie della verità"
 www.k-sport.it "Match analysis, GPS, potenza metabolica: le bugie della verità" Mirko Marcolini Il carico esterno Cos è Ogni grandezza fisica viene definita mediante il metodo che si usa per misurarla.
www.k-sport.it "Match analysis, GPS, potenza metabolica: le bugie della verità" Mirko Marcolini Il carico esterno Cos è Ogni grandezza fisica viene definita mediante il metodo che si usa per misurarla.
CENTRO DI MASSA. il punto geometrico le cui coordinate, in un dato sistema di riferimento, sono date da:
 CENTRO DI MASSA il punto geometrico le cui coordinate, in un dato sistema di riferimento, sono date da: dove M = m 1 + m 2 +... + m N è la massa totale del sistema e le quantità r i sono i raggi vettori
CENTRO DI MASSA il punto geometrico le cui coordinate, in un dato sistema di riferimento, sono date da: dove M = m 1 + m 2 +... + m N è la massa totale del sistema e le quantità r i sono i raggi vettori
ELEMENTI DI CINEMATICA Una volta fissato un sistema di riferimento con la sua origine O è possibile descrivere in ogni istante la posizione del punto
 ELEMENTI DI CINEMATICA Una volta fissato un sistema di riferimento con la sua origine O è possibile descrivere in ogni istante la posizione del punto P al passare del tempo t per mezzo della terna di coordinate
ELEMENTI DI CINEMATICA Una volta fissato un sistema di riferimento con la sua origine O è possibile descrivere in ogni istante la posizione del punto P al passare del tempo t per mezzo della terna di coordinate
j B Dati: ω1=100 rad/s velocità angolare della manovella (1); l = 250 mm (lunghezza della biella 2); r = 100 mm (lunghezza della manovella 1).
; l = 250 mm (lunghezza della biella 2); r = 100 mm (lunghezza della manovella 1).") j B A l 2 1 ω1 r ϑ i Piede di biella Testa di biella Biella Braccio di manovella Siti interessanti sul meccanismo biella-manovella: http://it.wikipedia.org/wiki/meccanismo_biella-manovella http://www.istitutopesenti.it/dipartimenti/meccanica/meccanica/biella.pdf
j B A l 2 1 ω1 r ϑ i Piede di biella Testa di biella Biella Braccio di manovella Siti interessanti sul meccanismo biella-manovella: http://it.wikipedia.org/wiki/meccanismo_biella-manovella http://www.istitutopesenti.it/dipartimenti/meccanica/meccanica/biella.pdf
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica
 CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Analisi del moto dei proietti
 Moto dei proietti E il moto di particelle che vengono lanciate con velocità iniziale v 0 e sono soggette alla sola accelerazione di gravità g supposta costante. La pallina rossa viene lasciata cadere da
Moto dei proietti E il moto di particelle che vengono lanciate con velocità iniziale v 0 e sono soggette alla sola accelerazione di gravità g supposta costante. La pallina rossa viene lasciata cadere da
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Se prendiamo in considerazione una sfera rotante su se stessa con velocità periferica C p
 Effetti giroscopici su una sfera rotante, teoria dell effetto Magnus, massa longitudinale e massa trasversale, Abbiamo visto che la presenza di materia può essere rilevata ( e dunque la materia esiste)
Effetti giroscopici su una sfera rotante, teoria dell effetto Magnus, massa longitudinale e massa trasversale, Abbiamo visto che la presenza di materia può essere rilevata ( e dunque la materia esiste)
Sistemi Rigidi. --> la posizione del CM rimane invariata rispetto a quella dei punti materiali
 Sistemi Rigidi Sistema rigido --> corpo indeformabile (distanze costanti tra le coppie dei punti materiali costituenti) qualsiasi siano le forze esterne agenti su di esso --> in realtà tutti corpi sottoposti
Sistemi Rigidi Sistema rigido --> corpo indeformabile (distanze costanti tra le coppie dei punti materiali costituenti) qualsiasi siano le forze esterne agenti su di esso --> in realtà tutti corpi sottoposti
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina
 Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si consideri un cilindro rigido libero in moto rispetto a un osservatore. Sia O il punto occupato
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si consideri un cilindro rigido libero in moto rispetto a un osservatore. Sia O il punto occupato
Azioni aerodinamiche. Per esprimere la generica forza F e il generico momento aerodinamico M in modo semplice si ricorre alle espressioni
 Per esprimere la generica forza F e il generico momento aerodinamico M in modo semplice si ricorre alle espressioni F = ρvsc f M = ρvslc m si suppone cioè che essi siano proporzionali alla pressione dinamica
Per esprimere la generica forza F e il generico momento aerodinamico M in modo semplice si ricorre alle espressioni F = ρvsc f M = ρvslc m si suppone cioè che essi siano proporzionali alla pressione dinamica
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
Corso di livello avanzato «L armamento ferroviario» Roma 27/11/2013
 Corso di livello avanzato «L armamento ferroviario» Roma 27/11/2013 Diagnostica della ferrovia Diagnostica dell armamento Sicurezza Individuazione di difetti singoli rilevanti Organizzazione di interventi
Corso di livello avanzato «L armamento ferroviario» Roma 27/11/2013 Diagnostica della ferrovia Diagnostica dell armamento Sicurezza Individuazione di difetti singoli rilevanti Organizzazione di interventi
0.6 Moto rotazionale intorno ad un asse fisso
 0.6.0. Moto rotazionale intorno ad un asse fisso 25 0.6 Moto rotazionale intorno ad un asse fisso Premessa Questa esperienza riguarda lo studio del comportamento di un corpo (volano) libero di ruotare
0.6.0. Moto rotazionale intorno ad un asse fisso 25 0.6 Moto rotazionale intorno ad un asse fisso Premessa Questa esperienza riguarda lo studio del comportamento di un corpo (volano) libero di ruotare
Costruzione automatica della matrice jacobiana da impiegare nella simulazione dinamica
 Elaborato finale per il conseguimento della Laurea in n Ingegneria meccanica (sede di Roma) Finito di elaborare il 10/12/2012 Costruzione automatica della matrice jacobiana da impiegare nella simulazione
Elaborato finale per il conseguimento della Laurea in n Ingegneria meccanica (sede di Roma) Finito di elaborare il 10/12/2012 Costruzione automatica della matrice jacobiana da impiegare nella simulazione
Architettura Software di un Sistema di Controllo per Multirotore
 Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it
Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it
Notiamo che, per una massa che rotorivoluisca sull orbita senza scorrimento, per la componente giroscopica, con V n. v p
 Natura fisica ed espressione della forza di Lorentz, calcolo del campo magnetico nucleare Abbiamo visto che, se applichiamo il principio di conservazione del momento angolare nello spazio, se la massa
Natura fisica ed espressione della forza di Lorentz, calcolo del campo magnetico nucleare Abbiamo visto che, se applichiamo il principio di conservazione del momento angolare nello spazio, se la massa
Controllo Digitale. Riassumendo. I sistemi di controllo digitale hanno alcuni vantaggi rispetto ai sistemi di controllo a tempo continuo:
 Parte 12, 1 Motivazioni Parte 12, 2 I sistemi di controllo digitale hanno alcuni vantaggi rispetto ai sistemi di controllo a tempo continuo: Controllo Digitale Flessibilità del SW rispetto all HW Compatibilità
Parte 12, 1 Motivazioni Parte 12, 2 I sistemi di controllo digitale hanno alcuni vantaggi rispetto ai sistemi di controllo a tempo continuo: Controllo Digitale Flessibilità del SW rispetto all HW Compatibilità
Esame 12/02/2004 Soluzione
 Teoria dei Sistemi Dinamici 1GTG/2GTG Esame 12/2/24 Prego segnalare errori o inesattezze a basilio.bona@polito.it 1 Sistemi di riferimento, rototraslazioni (6 punti) Esercizio 1.1 Costruire la matrice
Teoria dei Sistemi Dinamici 1GTG/2GTG Esame 12/2/24 Prego segnalare errori o inesattezze a basilio.bona@polito.it 1 Sistemi di riferimento, rototraslazioni (6 punti) Esercizio 1.1 Costruire la matrice
Avanguardia sul binario
 Avanguardia sul binario Seminario Tecnico CIFI PLASSER ITALIANA Bologna, 19 settembre 2013 Rilevamento della geometria del binario dopo interventi manutentivi sull AV, con piattaforma inerziale installata
Avanguardia sul binario Seminario Tecnico CIFI PLASSER ITALIANA Bologna, 19 settembre 2013 Rilevamento della geometria del binario dopo interventi manutentivi sull AV, con piattaforma inerziale installata
INTRODUZIONE ALLA CINEMATICA DEL PUNTO MATERIALE PROF. FRANCESCO DE PALMA
 INTRODUZIONE ALLA CINEMATICA DEL PUNTO MATERIALE PROF. FRANCESCO DE PALMA Sommario MOTO E TRAIETTORIA... 3 PUNTO MATERIALE... 3 TRAIETTORIA... 3 VELOCITÀ... 4 VELOCITÀ MEDIA... 4 VELOCITÀ ISTANTANEA...
INTRODUZIONE ALLA CINEMATICA DEL PUNTO MATERIALE PROF. FRANCESCO DE PALMA Sommario MOTO E TRAIETTORIA... 3 PUNTO MATERIALE... 3 TRAIETTORIA... 3 VELOCITÀ... 4 VELOCITÀ MEDIA... 4 VELOCITÀ ISTANTANEA...
Ispezione Ponti. Fig 3 Distanza Veicolo Base GPS di riferimento, in ascissa è riportato il tempo e in ordinata la distanza in km
 Committente: Provincia di Napoli (Politecnica SpA) Obiettivo del progetto: Uno dei settori di maggiore potenzialità per l utilizzo delle tecnologie di rilievo del Mobile Mapping System SCANNER è quella
Committente: Provincia di Napoli (Politecnica SpA) Obiettivo del progetto: Uno dei settori di maggiore potenzialità per l utilizzo delle tecnologie di rilievo del Mobile Mapping System SCANNER è quella
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 11 Settembre 2008 Esercizio Si consideri il manipolatore mobile in figura, costituito da una base mobile su ruote car-like con a bordo un manipolatore 2R planare. Siano: (x,
Prova Scritta di Robotica I 11 Settembre 2008 Esercizio Si consideri il manipolatore mobile in figura, costituito da una base mobile su ruote car-like con a bordo un manipolatore 2R planare. Siano: (x,
Anna M. Nobili: Lezioni Fisica 1 per Chimici a.a
 Anna M. Nobili: Lezioni Fisica 1 per Chimici a.a. 2013-2014 26 Settembre 2013 Grandezze fisiche, dimensioni e unità di misura. Potenze di 10 e loro uso. 3 Ottobre 2013 Grandezze fisiche, dimensioni e
Anna M. Nobili: Lezioni Fisica 1 per Chimici a.a. 2013-2014 26 Settembre 2013 Grandezze fisiche, dimensioni e unità di misura. Potenze di 10 e loro uso. 3 Ottobre 2013 Grandezze fisiche, dimensioni e
L integrazione di GPS con altri strumenti topografici
 Scuola Regionale Servizi GPS di posizionamento per il territorio o e il catasto 16 Febbraio 2006 L integrazione di GPS con altri strumenti topografici Ing.. Marco Scaioni Politecnico di Milano D.I.I.A.R.
Scuola Regionale Servizi GPS di posizionamento per il territorio o e il catasto 16 Febbraio 2006 L integrazione di GPS con altri strumenti topografici Ing.. Marco Scaioni Politecnico di Milano D.I.I.A.R.
Corso di livello avanzato «L armamento ferroviario» Genova 28/11/2014
 Corso di livello avanzato «L armamento ferroviario» Genova 28/11/2014 Ripristino della geometria del binario Sopraelevazione Sghembo Livello longitudinale D1: 3m 25m D2: 25m 70m D3: 70m 150m Allineamento
Corso di livello avanzato «L armamento ferroviario» Genova 28/11/2014 Ripristino della geometria del binario Sopraelevazione Sghembo Livello longitudinale D1: 3m 25m D2: 25m 70m D3: 70m 150m Allineamento
Tecnologia e rilievo del carico esterno nel calcio
 www.k-sport.it Tecnologia e rilievo del carico esterno nel calcio Una mela cade dall albero. Qualcuno ci vede un frutto andato a male. Qualcun altro la legge di gravità. Mirko Marcolini 1 Cos è Ogni grandezza
www.k-sport.it Tecnologia e rilievo del carico esterno nel calcio Una mela cade dall albero. Qualcuno ci vede un frutto andato a male. Qualcun altro la legge di gravità. Mirko Marcolini 1 Cos è Ogni grandezza
Una tecnologia innovativa migliora l accuratezza nella misura di potenza
 Una tecnologia innovativa migliora l accuratezza nella misura di potenza Introduzione Rapidi sviluppi nelle tecnologie di conversione di potenza combinate con la necessità di migliore efficienza creano
Una tecnologia innovativa migliora l accuratezza nella misura di potenza Introduzione Rapidi sviluppi nelle tecnologie di conversione di potenza combinate con la necessità di migliore efficienza creano
Our focus is: accesso e controllo della telecamera da remoto 24/7. Dynamic Transcoding
 Our focus is: accesso e controllo della telecamera da remoto 24/7 Dynamic Transcoding 2 Dynamic Transcoding Accesso e controllo da remoto 24/7 in qualsiasi momento, ovunque Una limitata larghezza di banda
Our focus is: accesso e controllo della telecamera da remoto 24/7 Dynamic Transcoding 2 Dynamic Transcoding Accesso e controllo da remoto 24/7 in qualsiasi momento, ovunque Una limitata larghezza di banda
RELAZIONE TECNICA. ISTITUTO SUPERIORE STATALE G. GALILEI MIRANDOLA (MO) Via J. Barozzi, 4 Sede temporanea E.S.T.
 Via J. Barozzi, 4 Sede temporanea E.S.T.") ISTITUTO SUPERIORE STATALE G. GALILEI RELAZIONE TECNICA. 41037 MIRANDOLA (MO) Via J. Barozzi, 4 Sede temporanea E.S.T.Via 29 Maggio Presidenza 0535.22034 Fax 0535.20717 Email:segreteria@galileimirandola.it
ISTITUTO SUPERIORE STATALE G. GALILEI RELAZIONE TECNICA. 41037 MIRANDOLA (MO) Via J. Barozzi, 4 Sede temporanea E.S.T.Via 29 Maggio Presidenza 0535.22034 Fax 0535.20717 Email:segreteria@galileimirandola.it
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile
 Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2013-2014 A. Ponno (aggiornato al 30 dicembre 2013) 2 Ottobre 2013 1/10/13 Benvenuto, presentazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2013-2014 A. Ponno (aggiornato al 30 dicembre 2013) 2 Ottobre 2013 1/10/13 Benvenuto, presentazione
Pixel MM. Definisce la corrispondenza tra le coordinate pixel e le coordinate mm
 Taratura Vs calibration Taratura È il processo di verifica del corretto funzionamento di uno strumento di misura Determina gli errori dello strumento (o il valore di un campione) Il procedimento è guidato
Taratura Vs calibration Taratura È il processo di verifica del corretto funzionamento di uno strumento di misura Determina gli errori dello strumento (o il valore di un campione) Il procedimento è guidato
Codice Denominazione insegnamento CFU A.A. G290UB Elementi di fisica - unità didattica 2 2 1
 Obiettivi formativi Il corso si propone di fornire le conoscenze basilari di fisica, con particolare riguardo alla meccanica e fluidodinamica per il loro interesse nei processi di tecnologia alimentare.
Obiettivi formativi Il corso si propone di fornire le conoscenze basilari di fisica, con particolare riguardo alla meccanica e fluidodinamica per il loro interesse nei processi di tecnologia alimentare.
CINEMATICA. Prof Giovanni Ianne
 CINEMATICA Il moto e la velocità L accelerazione Moto rettilineo uniforme Moto rettilineo uniformemente accelerato Moti periodici e composti il moto e la velocità Un corpo è in moto quando la sua posizione
CINEMATICA Il moto e la velocità L accelerazione Moto rettilineo uniforme Moto rettilineo uniformemente accelerato Moti periodici e composti il moto e la velocità Un corpo è in moto quando la sua posizione
Theory Italiano (Italy) Prima di iniziare questo problema, leggi le istruzioni di carattere generale fornite a parte.
 Prima di iniziare questo problema, leggi le istruzioni di carattere generale fornite a parte.") Q1-1 Due problemi di Meccanica (10 punti) Prima di iniziare questo problema, leggi le istruzioni di carattere generale fornite a parte. Parte A. Il disco nascosto (3.5 punti) i consideri un disco solido
Q1-1 Due problemi di Meccanica (10 punti) Prima di iniziare questo problema, leggi le istruzioni di carattere generale fornite a parte. Parte A. Il disco nascosto (3.5 punti) i consideri un disco solido
INTRODUZIONE ALL IMPIEGO DI SENSORI INERZIALI E GPS NELLA GEOREFERENZIAZIONE DIRETTA DELLE IMMAGINI IN FOTOGRAMMETRIA AEREA E TERRESTRE
 DIPARTIMENTO DI INGEGNERIA CIVILE, DELL AMBIENTE, DEL TERRITORIO ED ARCHITETTURA Università degli Studi di Parma Settore Scientifico Disciplinare: ICAR/06 Topografia e Cartografia INTRODUZIONE ALL IMPIEGO
DIPARTIMENTO DI INGEGNERIA CIVILE, DELL AMBIENTE, DEL TERRITORIO ED ARCHITETTURA Università degli Studi di Parma Settore Scientifico Disciplinare: ICAR/06 Topografia e Cartografia INTRODUZIONE ALL IMPIEGO
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA. OBIETTIVI U. D. n 1.2: La rappresentazione di dati e fenomeni
 FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
RIASSUNTO Motoveicolo (100) del tipo comprendente: -almeno una ruota anteriore ed almeno una ruota posteriore disposte secondo un asse longitudinale
 del tipo comprendente: -almeno una ruota anteriore ed almeno una ruota posteriore disposte secondo un asse longitudinale") RIASSUNTO Motoveicolo (100) del tipo comprendente: -almeno una ruota anteriore ed almeno una ruota posteriore disposte secondo un asse longitudinale (X-X); - un telaio (1); - un motore (17); -una prima
RIASSUNTO Motoveicolo (100) del tipo comprendente: -almeno una ruota anteriore ed almeno una ruota posteriore disposte secondo un asse longitudinale (X-X); - un telaio (1); - un motore (17); -una prima
F, viene allungata o compressa di un tratto s rispetto alla sua posizione di equilibrio.
 UNIÀ 4 L EQUILIBRIO DEI SOLIDI.. La forza elastica di una molla.. La costante elastica e la legge di Hooke. 3. La forza peso. 4. Le forze di attrito. 5. La forza di attrito statico. 6. La forza di attrito
UNIÀ 4 L EQUILIBRIO DEI SOLIDI.. La forza elastica di una molla.. La costante elastica e la legge di Hooke. 3. La forza peso. 4. Le forze di attrito. 5. La forza di attrito statico. 6. La forza di attrito
Cinematica in due o più dimensioni
 Cinematica in due o più dimensioni Le grandezze cinematiche fondamentali: posizione, velocità, accelerazione, sono dei vettori nello spazio a due o tre dimensioni, dotati di modulo, direzione, verso. In
Cinematica in due o più dimensioni Le grandezze cinematiche fondamentali: posizione, velocità, accelerazione, sono dei vettori nello spazio a due o tre dimensioni, dotati di modulo, direzione, verso. In
Lecce- XI scuola estiva di fisica Mirella Rafanelli. I sistemi estesi. La dinamica oltre il punto..
 Lecce- XI scuola estiva di fisica - 2018 Mirella Rafanelli I sistemi estesi La dinamica oltre il punto.. Lecce- XI scuola estiva di fisica - 2018 Mirella Rafanelli Nota bene: quanto segue serve come strumento
Lecce- XI scuola estiva di fisica - 2018 Mirella Rafanelli I sistemi estesi La dinamica oltre il punto.. Lecce- XI scuola estiva di fisica - 2018 Mirella Rafanelli Nota bene: quanto segue serve come strumento
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE
 UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE 2 Febbraio 208 ESAME DI MECCANICA solo PRIMA PARTE Versione A Corso di Laurea in Ingegneria Biomedica Esercizio Si consideri il meccanismo
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE 2 Febbraio 208 ESAME DI MECCANICA solo PRIMA PARTE Versione A Corso di Laurea in Ingegneria Biomedica Esercizio Si consideri il meccanismo
Codice Denominazione insegnamento CFU A.A. G290QA_1 Elementi di fisica e fisica tecnica mod. 1: fisica - Unità Didattica 1 4 1
 Obiettivi formativi Il Corso si propone di fornire le conoscenze basilari di fisica, propedeutiche e correlate agli altri insegnamenti previsti dal Corso di Laurea. Competenze acquisite Conoscere le grandezze
Obiettivi formativi Il Corso si propone di fornire le conoscenze basilari di fisica, propedeutiche e correlate agli altri insegnamenti previsti dal Corso di Laurea. Competenze acquisite Conoscere le grandezze
Dinamica del punto materiale: problemi con gli oscillatori.
 Dinamica del punto materiale: problemi con gli oscillatori. Problema: Una molla ideale di costante elastica k = 300 Nm 1 e lunghezza a riposo l 0 = 1 m pende verticalmente avendo un estremità fissata ad
Dinamica del punto materiale: problemi con gli oscillatori. Problema: Una molla ideale di costante elastica k = 300 Nm 1 e lunghezza a riposo l 0 = 1 m pende verticalmente avendo un estremità fissata ad
MOMENTI DI INERZIA PER CORPI CONTINUI
 MOMENTI D INERZIA E PENDOLO COMPOSTO PROF. FRANCESCO DE PALMA Indice 1 INTRODUZIONE -------------------------------------------------------------------------------------------------------------- 3 2 MOMENTI
MOMENTI D INERZIA E PENDOLO COMPOSTO PROF. FRANCESCO DE PALMA Indice 1 INTRODUZIONE -------------------------------------------------------------------------------------------------------------- 3 2 MOMENTI
POLITECNICO DI TORINO Repository ISTITUZIONALE
 POLITECNICO DI TORINO Repository ISTITUZIONALE, quaderno di approfondimento Original, quaderno di approfondimento / Cimnaghi E.. - ELETTRONICO. - (2010), pp. 1-84. Availability: This version is available
POLITECNICO DI TORINO Repository ISTITUZIONALE, quaderno di approfondimento Original, quaderno di approfondimento / Cimnaghi E.. - ELETTRONICO. - (2010), pp. 1-84. Availability: This version is available
Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza. Locomozione Bipede. Fabio Zonfrilli. Corso di Robotica II 11 Febbraio 2004
 Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza Locomozione Bipede Fabio Zonfrilli Corso di Robotica II 11 Febbraio 2004 Sommario Tipologie di sistemi bipedi Passive walkers Hopping
Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza Locomozione Bipede Fabio Zonfrilli Corso di Robotica II 11 Febbraio 2004 Sommario Tipologie di sistemi bipedi Passive walkers Hopping
Sensori di Prossimità Guida Utente
 Sensori di Prossimità Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 NORME DI INSTALLAZIONE... 2 2.1 Precauzioni... 2 2.2 Connessione elettrica... 3 3 SETTAGGIO DEI CANALI CON ACQUISITORI GET... 3 4 CARATTERISTICHE
Sensori di Prossimità Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 NORME DI INSTALLAZIONE... 2 2.1 Precauzioni... 2 2.2 Connessione elettrica... 3 3 SETTAGGIO DEI CANALI CON ACQUISITORI GET... 3 4 CARATTERISTICHE
Soluzione Compitino Fisica Generale I Ing. Elettronica e Telecomunicazioni 02 Maggio 2017
 Soluzione Compitino Fisica Generale I Ing. Elettronica e Telecomunicazioni 02 Maggio 2017 Esercizio 1 1) Sulla tavola agiscono: a) la forza peso, diretta ortogonalmente al moto; b) le reazioni normali
Soluzione Compitino Fisica Generale I Ing. Elettronica e Telecomunicazioni 02 Maggio 2017 Esercizio 1 1) Sulla tavola agiscono: a) la forza peso, diretta ortogonalmente al moto; b) le reazioni normali
Le coniche retta generatrice
 Le coniche Consideriamo un cono retto a base circolare a due falde ed un piano. Le intersezioni possibili tra le due figure sono rappresentate dallo schema seguente Le figure che si possono ottenere sono
Le coniche Consideriamo un cono retto a base circolare a due falde ed un piano. Le intersezioni possibili tra le due figure sono rappresentate dallo schema seguente Le figure che si possono ottenere sono
Consideriamo come piena solo l innalzamento del livello causato da un aumento delle portate nel corso d acqua considerato.
 Propagazione delle piene: generalità Consideriamo come piena solo l innalzamento del livello causato da un aumento delle portate nel corso d acqua considerato. La propagazione dell onda di piena dipende
Propagazione delle piene: generalità Consideriamo come piena solo l innalzamento del livello causato da un aumento delle portate nel corso d acqua considerato. La propagazione dell onda di piena dipende
Registro di Meccanica /13 - F. Demontis 2
 Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2013/2014 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2014 1. Lunedì 3/03/2014, 9 11. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2013/2014 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2014 1. Lunedì 3/03/2014, 9 11. ore: 2(2) Presentazione
OTTICA. Piano Lauree Scientifiche 1 febbraio 2013
 OTTICA Ottica geometrica Ottica fisica Ignora il carattere ondulatorio della luce e parla di raggi luminosi che si propagano in linea retta. Fenomeni descritti dall ottica geometrica: riflessione e rifrazione
OTTICA Ottica geometrica Ottica fisica Ignora il carattere ondulatorio della luce e parla di raggi luminosi che si propagano in linea retta. Fenomeni descritti dall ottica geometrica: riflessione e rifrazione
Evento Sismico della Lunigiana (Massa-Carrara) 21/06/2013, ore 10:33:57 UTC, M L =5.2: Simulazione della procedura di Early Warning
 21/06/2013, ore 10:33:57 UTC, M L =5.2: Simulazione della procedura di Early Warning") Evento Sismico della Lunigiana (Massa-Carrara) 21/06/2013, ore 10:33:57 UTC, M L =5.2: Simulazione della procedura di Early Warning -Lab: Laboratorio di RIcerca in Sismologia Sperimentale e Computazionale
Evento Sismico della Lunigiana (Massa-Carrara) 21/06/2013, ore 10:33:57 UTC, M L =5.2: Simulazione della procedura di Early Warning -Lab: Laboratorio di RIcerca in Sismologia Sperimentale e Computazionale
Registro di Meccanica /17 - F. Demontis 2
 Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: 9 giugno 2017 1. Venerdì 3/03/2017, 11 13. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: 9 giugno 2017 1. Venerdì 3/03/2017, 11 13. ore: 2(2) Presentazione
Servizio clienti di alto livello
 Servizio clienti di alto livello boschsecurity.com/instoreanalytics In-Store Analytics Operations Module Un servizio clienti eccellente permette al negozio di distinguersi e di migliorare le vendite e
Servizio clienti di alto livello boschsecurity.com/instoreanalytics In-Store Analytics Operations Module Un servizio clienti eccellente permette al negozio di distinguersi e di migliorare le vendite e
POLITECNICO DI BARI I FACOLTÀ DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA MECCANICA DIPARTIMENTO DI INGEGNERIA MECCANICA E GESTIONALE
 POLITECNICO DI BARI I FACOLTÀ DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA MECCANICA DIPARTIMENTO DI INGEGNERIA MECCANICA E GESTIONALE TESI DI LAUREA IN MECCANICA DEI MATERIALI DESIGN OTTIMO DI UN ANTENNA
POLITECNICO DI BARI I FACOLTÀ DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA MECCANICA DIPARTIMENTO DI INGEGNERIA MECCANICA E GESTIONALE TESI DI LAUREA IN MECCANICA DEI MATERIALI DESIGN OTTIMO DI UN ANTENNA
Integrazione delle equazioni del moto
 Giorgio Pastore - note per il corso di Laboratorio di Calcolo Integrazione delle equazioni del moto In generale, le equazioni del moto della meccanica newtoniana si presentano nella forma di sistemi di
Giorgio Pastore - note per il corso di Laboratorio di Calcolo Integrazione delle equazioni del moto In generale, le equazioni del moto della meccanica newtoniana si presentano nella forma di sistemi di
eper novità dell aggiornamento 2009 Introduzione Nuova veste grafica
 eper novità dell aggiornamento 2009 Introduzione Con la nuova versione 2009, eper viene arricchito di una serie di novità che migliorano ulteriormente la consultazione dei Cataloghi Ricambi di Fiat Group
eper novità dell aggiornamento 2009 Introduzione Con la nuova versione 2009, eper viene arricchito di una serie di novità che migliorano ulteriormente la consultazione dei Cataloghi Ricambi di Fiat Group
Continuo Deformabile: Deformabile cambia forma per effetto dello spostamento dei suoi punti; Continuo gli spostamenti dei punti sono descritti da
 Il Continuo Deformabile Continuo Deformabile: Deformabile cambia forma per effetto dello spostamento dei suoi punti; Continuo gli spostamenti dei punti sono descritti da funzioni continue e differenziabili:
Il Continuo Deformabile Continuo Deformabile: Deformabile cambia forma per effetto dello spostamento dei suoi punti; Continuo gli spostamenti dei punti sono descritti da funzioni continue e differenziabili:
La descrizione del moto
 Professoressa Corona Paola Classe 1 B anno scolastico 2016-2017 La descrizione del moto Il moto di un punto materiale La traiettoria Sistemi di riferimento Distanza percorsa Lo spostamento La legge oraria
Professoressa Corona Paola Classe 1 B anno scolastico 2016-2017 La descrizione del moto Il moto di un punto materiale La traiettoria Sistemi di riferimento Distanza percorsa Lo spostamento La legge oraria
Guida alle esperienze di laboratorio
 LABORATORIO III Corso di Laurea in Fisica (Orientamento Generale) Guida alle esperienze di laboratorio Anno accademico 2008 09 (October 2, 2011) La descrizione di ogni esperienza è pensata come una scheda
LABORATORIO III Corso di Laurea in Fisica (Orientamento Generale) Guida alle esperienze di laboratorio Anno accademico 2008 09 (October 2, 2011) La descrizione di ogni esperienza è pensata come una scheda
MOTO DI PURO ROTOLAMENTO
 MOTO DI PURO ROTOLAMENTO PROF. FRANCESCO DE PALMA Indice 1 INTRODUZIONE -------------------------------------------------------------------------------------------------------------- 3 2 MOTO DI PURO ROTOLAMENTO
MOTO DI PURO ROTOLAMENTO PROF. FRANCESCO DE PALMA Indice 1 INTRODUZIONE -------------------------------------------------------------------------------------------------------------- 3 2 MOTO DI PURO ROTOLAMENTO
Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: Cognome e nome: (dati nascosti per tutela privacy)
") Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000695216 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000695216 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Appunti per la classe terza. Geometria Analitica
 Istituto Professionale L. Lagrange Torino A.S. 008-009 Appunti per la classe terza Geometria Analitica Autore: Di Liscia Francesca Indice 1 Piano cartesiano 1.1 Punto medio......................................
Istituto Professionale L. Lagrange Torino A.S. 008-009 Appunti per la classe terza Geometria Analitica Autore: Di Liscia Francesca Indice 1 Piano cartesiano 1.1 Punto medio......................................
UNIVERSITA DEGLI STUDI DI GENOVA SCUOLA POLITECNICA FISICA GENERALE I
 FISICA GENERALE I - Sede di Spezia Prova A del 11/01/2016 ME 1 Un ragno di massa m R = 5.0 g usa il proprio filo come una liana (lunghezza L =10 cm). Partendo da fermo con il filo inclinato di un angolo
FISICA GENERALE I - Sede di Spezia Prova A del 11/01/2016 ME 1 Un ragno di massa m R = 5.0 g usa il proprio filo come una liana (lunghezza L =10 cm). Partendo da fermo con il filo inclinato di un angolo
Controllo di un Apparato di Movimentazione
 Esami di Stato per l'abilitazione all'esercizio della professione di Ingegnere Sessione I - 2006 Vecchio Ordinamento Ingegneria Informatica - Tema n. 3 Controllo di un Apparato di Movimentazione Lo schema
Esami di Stato per l'abilitazione all'esercizio della professione di Ingegnere Sessione I - 2006 Vecchio Ordinamento Ingegneria Informatica - Tema n. 3 Controllo di un Apparato di Movimentazione Lo schema