METODO DELLE FORZE 1. METODO DELLE FORZE PER LA SOLUZIONE DI STRUTTURE IPERSTATICHE. 1.1 Introduzione
|
|
|
- Cristoforo Giglio
- 8 anni fa
- Visualizzazioni
Transcript
1 METODO DELLE FORZE CORSO DI PROGETTZIONE STRUTTURLE a.a. 010/011 Prof. G. Salerno ppunti elaborati da rch. C. Provenzano 1. METODO DELLE FORZE PER L SOLUZIONE DI STRUTTURE IPERSTTICHE 1.1 Introduzione Il metodo delle forze è uno dei possibili metodi per la risoluzione di strutture iperstatiche in generale e si adatta perfettamente al caso di strutture iperstatiche composte da travi. In questo contesto, esso presenta il vantaggio di consentire la risoluzione analitica di una serie di esempi di interesse applicativo (es: la singola trave, la trave continua su più appoggi, etc) insegnando anche a maneggiare le equazioni di compatibilità cinematica, a ricordare le formule più semplice di spostamento e/o rotazione su strutture isostatiche, ad applicare rapidamente la sovrapposizione degli effetti, dimostrandosi quindi un metodo con potenzialità formative. Se così non fosse, non avrebbe senso far calcolare a mano strutture che un qualunque codice di calcolo risolve immediatamente. Il metodo ha anche una parentela profonda con il principio dei lavori virtuali, che ammette una maggiore generalità ed anche un maggiore automatismo nella scrittura delle equazioni di compatibilità cinematica, ma questo viene detto solo come richiamo, senza diventare oggetto delle lezioni che seguiranno. Il metodo delle forze consiste primariamente nel porre come incognite del problema alcune reazioni vincolari (di vincoli interni o esterni, talvolta azioni di contatto in una sezione), il cui numero è pari al grado di iperstaticità della struttura in esame. Definite queste incognite in modo opportuno, ossia senza labilizzare la struttura di partenza, il metodo procede, tramite una sistematica applicazione del principio di sovrapposizione degli effetti, nella determinazione delle equazioni che ci consentono di determinare il valore delle suddette incognite. Queste equazioni sono di compatibilità cinematica: difatti, la scelta di rappresentare qualche grado di vincolo tramite la reazione (forza o coppia) corrispondente, elevandola al rango di incognita, equivale alla eliminazione di alcuni vincoli cinematici, che debbono essere ripristinati in termini di equazioni, affinché il sistema isostatico che si sta studiando corrisponda al sistema iperstatico di partenza. In maniera sistematica quindi, l applicazione del metodo prevede: 1) la scelta di una struttura isostatica di riferimento e l individuazione delle incognite iperstatiche; ) la scrittura delle equazioni di compatibilità cinematica che ripristinino i vincoli cinematici soppressi dalla trasformazione del vincolo cinematico in forza (reazione vincolare); ) la risoluzione del sistema di equazioni per la determinazione delle incognite iperstatiche; 4) la sistematica applicazione del principio di sovrapposizione degli effetti per la determinazione delle azioni di contatto sulla struttura iperstatica. Nelle figure che seguono vengono esemplificati alcuni concetti sopra descritti: nelle figure seguenti(fig. 1.1, Fig. 1., Fig. 1., Fig. 1.4) si mostra come ad una struttura iperstatica possano corrispondere tante strutture isostatiche di riferimento, ognuna relativa ad una scelta differente dell incognita iperstatica iperstatica. Infine, nella figura Fig. 1.5 viene mostrata una scelta errata dell incognita iperstatica, in quanto labilizza la struttura di partenza. 1

2 Fig. 1.1 Fig. 1. Fig. 1. Fig. 1.4 Fig. 1.5

3 1. Una prima esemplificazione Riferiamoci all esempio di Fig. 1.1 per descrivere i passi del metodo delle forze. La struttura è una volta iperstatica poiché il grado di vincolo è v=4 mentre i gradi di libertà sono l= v-l=4-=1. Inoltre tutti i vincoli sono ben messi e quindi v-l è il grado di iperstaticità della struttura. Vediamo cosa accade se applichiamo le sole equazioni della Statica. Mettendo in evidenza le reazioni vincolari e scrivendo le equazioni di bilancio della statica, si ottiene: Fig. 1.6 c 0 a b d bl 0 da cui si evince che le equazioni non ammettono un unica soluzione. Difatti, ci troviamo di fronte ad un sistema algebrico di tre equazioni e quattro incognite e dunque ci manca un equazione per determinare la soluzione del problema dell equilibrio. Questa equazione aggiuntiva non potrà essere di equilibrio, ma avrà un altro significato meccanico. Data questa premessa, procediamo con i seguenti passi: Primo passo : scegliere la struttura isostatica di riferimento ssociamo alla struttura iperstatica di partenza uno dei possibili schemi isostatici di riferimento. Scegliamo la trave doppiamente appoggiata di Fig. 1., dove il vincolo di incastro viene parzialmente rappresentato in termini cinematici (la cerniera) e sempre parzialmente rappresentato tramite una parte della sua reazione vincolare (la coppia X, incognita). Se rimaniamo confinati nelle equazioni della Statica, ossia se vediamo la struttura come un corpo rigido, tutti i valori di X sono possibili. Ma c è un solo valore di X che tiene conto dell effettiva deformabilità della struttura e dell effettivo funzionamento cinematico dei vincoli. Dobbiamo trovare quel valore. tal fine, è necessario introdurre aspetti legati alla deformabilità della struttura a partire dai quali potremo scrivere l equazione mancante e determinare univocamente il valore di X. Secondo passo : valutare l effetto cinematico provocato dai carichi attivi sulla struttura isostatica Valutiamo adesso come si deformerebbe la struttura isostatica per effetto del solo carico esterno di natura attiva, ossia, in questo caso, della densità di carico q (Fig. 1.7).

4 Fig. 1.7 Le sezioni della trave corrispondenti ai punti e subirebbero rispettivamente le due rotazioni q q, i cui valori possono essere determinati tramite integrazione della linea elastica. e Terzo passo : imporre la congruenza della deformazione e determinare il valore dell incognita/e iperstatica La rotazione nel punto, tuttavia, è puramente ipotetica. Difatti, non possiamo dimenticare che l operazione che ci ha consentito di selezionare una struttura isostatica di riferimento è solo un cambiamento di rappresentazione e che in c è un vincolo di incastro perfetto. Tale vincolo di incastro impedisce che avvengano spostamenti e rotazioni, condizionando, come mostrato in Fig. 1.8, la deformata reale. Fig. 1.8 Questo significa che la reazione vincolare iperstatica X produce, nella sezione in cui è applicata, un effetto cinematico opposto all effetto dei carichi attivi nella medesima sezione, per ripristinare l azione del vincolo(fig. 1.9). Fig. 1.9 Perché questo avvenga è necessario che la rotazione totale nel punto, somma per sovrapposizione degli effetti delle rotazioni dovute rispettivamente alla densità di carico q, ed all incognita iperstatica X, sia zero. naliticamente questa equazione si esprime con un equazione detta di compatibilità cinematica : X q 0 : 4

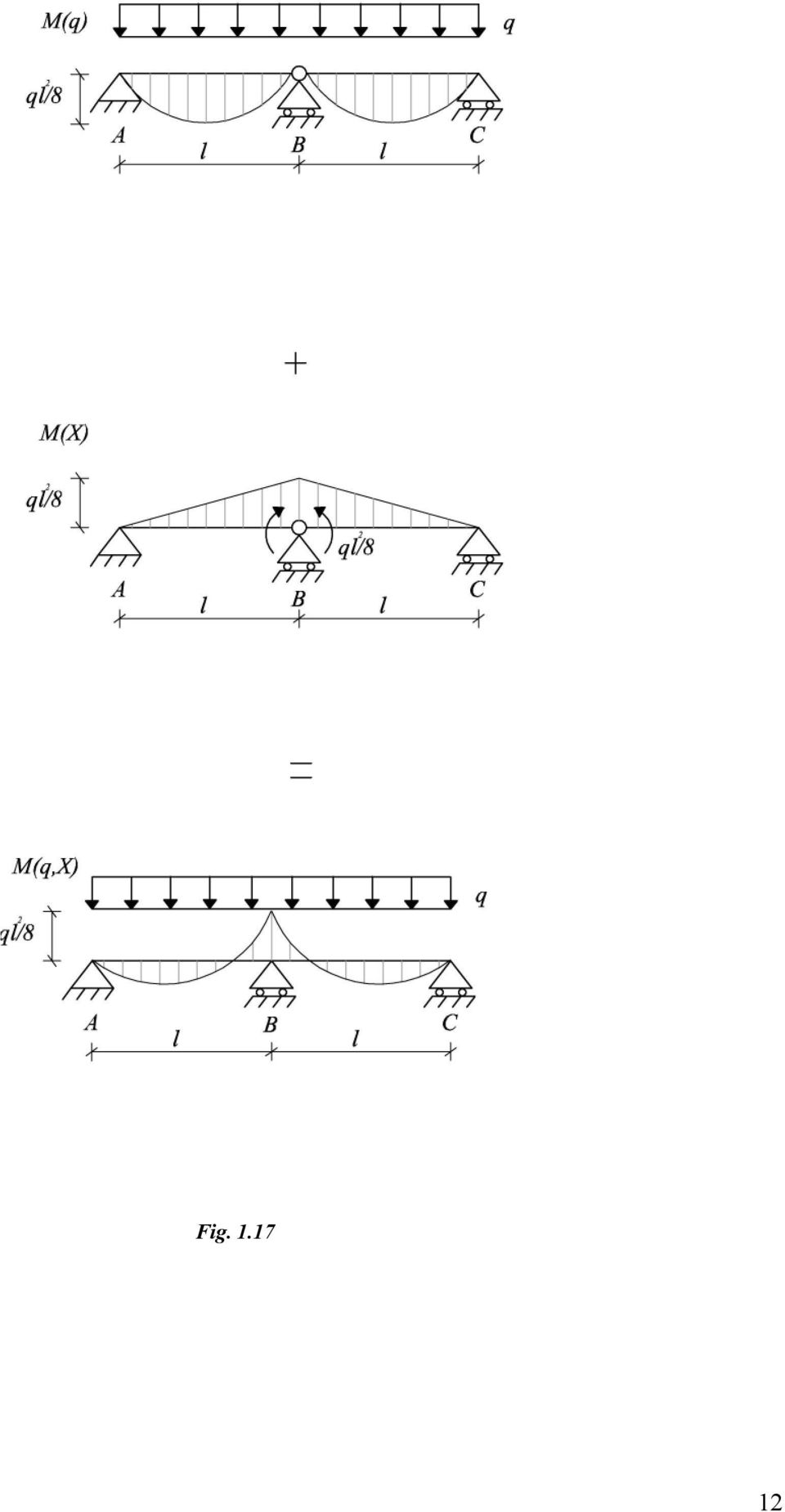
5 questo punto, si rimanda a risultati noti in termini di rotazioni (determinabili una volta per tutte, ad esempio, con l equazione della linea elastica): Xl EJ X analisi dimensionale: X F LL F L 4 L = numero puro 4EJ q analisi dimensionale: q F L L F L 4 L = numero puro che, sostituiti nell equazione di compatibilità cinematica, la trasformano in: Xl EJ 4EJ 0 Da questa si ricava il valore dell incognita iperstatica X X 8 Quarto passo : determinazione dei diagrammi delle sollecitazioni sulla struttura iperstatica questo punto è possibile determinare i diagrammi delle sollecitazioni sulla struttura iperstatica, come somma degli effetti dovuti alla densità di carico e alla coppia X. Riferendoci ad esempio al diagramma dei momenti flettenti, questo si ottiene sovrapponendo i due diagrammi di Fig. 1.10: 5

6 Fig

7 1. Una considerazione bbiamo precedentemente rimarcato che, utilizzando il metodo delle forze, ad un unica struttura iperstatica possono corrispondere vari modelli isostatici di riferimento. La scelta tra questi non influenza ovviamente il risultato finale. Difatti, se per la struttura del paragrafo precedente scegliessimo come schema isostatico di riferimento quello di Fig. 1., nel procedimento cambierebbero sia l incognita iperstatica, sia l equazione di congruenza necessaria per ripristinare la compatibilità cinematica. In particolare, per l esempio di figura la reazione iperstatica incognita è la reazione vincolare del carrello in e l equazione di compatibilità cinematica che le corrisponde richiede che sia nullo lo spostamento verticale totale del punto. Seguendo il procedimento delineato nella precedente soluzione, lo spostamento totale del punto sarà determinato come somma, per sovrapposizione degli effetti, degli spostamenti dovuti alla densità di carico q: v q ed alla reazione incognita X: v X. Pertanto, l equazione di compatibilità cinematica sarà: v X v q 0 : v nche questa volta richiamiamo risultati notevoli sugli spostamenti Xl v X EJ 4 v q 8EJ che ci consentono di esplicitare nell equazione i singoli contributi: Xl EJ 4 8 EJ 0 e determinare, infine, il valore di X X 8 nche in questo caso, il diagramma dei momenti della struttura iperstatica si ottiene come sovrapposizione dei diagrammi dei momenti flettenti dovuti rispettivamente alla densità di carico q ed alla reazione X (Fig. 1.11). 7

8 Fig

9 1.4 ltre applicazioni Trave continua su tre appoggi Si consideri la trave continua su tre appoggi (vedi Fig. 1.1) Fig. 1.1 La trave è una volta iperstatica. Nella figura Fig. 1.1 si mostrano due possibili scelte dello schema isostatico di riferimento e quindi dell incognita iperstatica: (a) (b) Fig. 1.1 Lo schema di Fig. 1.1a è più semplice in quanto la struttura isostatica di riferimento è una trave doppiamente appoggiata e la reazione iperstatica è la reazione vincolare dell appoggio centrale. Invece, nello schema di Fig. 1.1b la reazione vincolare non è esterna, ma interna e potrebbe risultare di concezione meno intuitiva. Tuttavia, come sarà rimarcato nel seguito, quest ultimo risulta facilmente generalizzabile al caso di trave continua su di un numero indefinito di appoggi. Pertanto, scegliamo di usare come struttura isostatica di riferimento quella nella Fig. 1.1b, in cui, una trave unica viene sostituita da due travi reciprocamente incernierate, entrambe doppiamente appoggiate. La struttura che ne risulta è isostatica in quanto i 6 gradi di libertà delle due travi sono compensati dalla somma dei vincoli esterni (v=4, una cerniera esterna più due carrelli) e del vincolo interno (v=, una cerniera interna). La specificità della reazione vincolare incognita sta nel fatto che essa è una parte del vincolo di continuità che prima teneva unite in un unico pezzo le due travi. In particolare, la reazione vincolare coincide con il momento flettente nella sezione (e quindi si rappresenta come due coppie eguali ed opposte, così come si rappresenta il momento flettente in una generica sezione) ed il suo effetto cinematico è quello di evitare la rotazione relativa delle sezioni su cui agisce (le sezioni che si affacciano nel punto ). Procedendo col passo successivo, osserviamo adesso come si deformerebbe la struttura isostatica di riferimento per effetto della densità di carico. 9

10 Fig Come indicato nella figura Fig. 1.1, ognuna delle due travi si comporta come una trave doppiamente appoggiata con sopra un carico ripartito. Pertanto, la singola trave subisce per effetto di q una rotazione della sezione in corrispondenza di entrambi gli appoggi. Poiché in le due travi ruotano in verso opposto, questo configura una rotazione relativa delle due sezioni che si affacciano in. Questa rotazione relativa (vedi figura 1.14) è pari alla somma in valore assoluto delle due rotazioni delle due travi in corrispondenza dell appoggio in. Se invece consideriamo le rotazione come quantità con segno (rotazione positiva se antioraria) la rotazione relativa sarà definita come la differenza tra la rotazione di destra e quella di sinistra. Ricordiamo che il valore assoluto della rotazione della sezione sull appoggio per una trave doppiamente appoggiata soggetta ad una carico ripartito pari a q vale /4 EI (Fig. 1.15). Fig Il valore della rotazione relativa prodotta da q sarà dunque pari a: ( q) S ( q) D ( q) = /(4 EI)- (- /(4 EI) = 1EJ Proseguendo nel ragionamento, l incognita iperstatica X dovrà produrre una rotazione relativa uguale in valore assoluto ed opposta in segno rispetto a quella prodotta dalla densità di carico, ottenendo come effetto la deformata mostrata nella figura che segue: Fig Ricordando che per una trave doppiamente appoggiata soggetta ad un momento X applicato in una delle due sezioni terminali, la rotazione della sezione dove X è applicato vale Xl/(EJ), il valore della rotazione relativa prodotta da X nella sezione sarà dunque pari a: Xl ( X ) S ( X ) D ( X ) = X EJ Xl Xl EJ EJ 10
 è pari alla somma in valore assoluto delle due rotazioni delle due travi in corrispondenza dell appoggio in.")
11 Imporre ora il rispetto del vincolo di continuità della trave, rimosso nella struttura isostatica di riferimento, significa imporre che la rotazione relativa nel punto, somma delle due rotazioni relative prodotte da q e da X, sia uguale a zero: q X 0 : Sostituendo i valori trovati sopra, si avrà : 1EJ Xl EJ 0 X 8 questo punto è possibile determinare i diagrammi del momento flettente della struttura iperstatica, sommando per sovrapposizione degli effetti i diagrammi dovuti rispettivamente alla densità di carico e alla coppia X nella struttura isostatica di riferimento. 11

12 Fig
13 1.4. Trave continua su sei appoggi Fig In tal caso si potrebbe scegliere il seguente schema isostatico: Fig L inconveniente presentato da questo schema è che le equazioni di compatibilità cinematica, quattro in questo caso, ossia una per ogni appoggio soppresso, assumerebbero una forma complessa. Difatti, nella scrittura delle equazioni di vincolo v =0, v =0, v =0, v D =0, bisogna comprendere ognuno degli spostamenti su indicati è la somma (essendo la trave unica) dei contributi dovuti alla densità di carico ed ognuna delle reazioni vincolari iperstatiche. Le equazioni di compatibilità cinematica assumono quindi la forma seguente: v v v v C D v v v C v D q v x v x v x v x q v x v x v x v x q v x v x v x v x 0 C 1 C C C 4 q v x v x v x v x 0 D 1 D D D 4 in cui si evidenzia che in ognuna delle equazioni sono presenti tutte e quattro le incognite. Il sistema di equazioni risulta fortemente accoppiato, quindi di soluzione meno agevole; inoltre, poiché ognuna delle incognite iperstatiche ha un differente punto di applicazione sulla trave, l espressione algebrica dello spostamento da essa indotto sarà di volta in volta diverso. Queste considerazioni spingono ad utilizzare, nel caso in esame, come struttura isostatica di riferimento quella indicata in Fig
 dei contributi dovuti alla")
14 Fig. 1.0 La scelta di uno schema di questo tipo, rispetto a quello mostrato in Fig. 1.19, si rivela più efficace perché le equazioni di compatibilità cinematica 0 0 C 0 D 0, risultano più maneggevoli algebricamente. Entriamo dunque nello specifico. Una prima considerazione risulta necessaria. Dalla Fig. 1.1 si evince come ogni coppia di momenti applicata in uno degli appoggi della trave continua induce rotazioni non solo nella sezione in cui è applicata, ma anche nelle sezioni corrispondenti ai due appoggi adiacenti. Fig. 1.1 In particolare, l incognita X applicata nella sezione produce delle rotazioni di trascinamento anche in e C di entità pari a: X X C X l 6EJ Di questa circostanza si tiene ovviamente conto nella scrittura delle equazioni di compatibilità cinematica. d esempio, la prima equazione impone l annullarsi della rotazione relativa nella sezione. Tale rotazione relativa è somma delle rotazioni relative prodotte da q ed X 1 alle quali si somma anche il contributo secondario prodotto dalla coppia di momenti X q X X 0 1 Sostituendo i valori suddetti si avrà: X 1l X l 0 1EJ EJ 6EJ Riscriviamo quindi anche le altre equazioni: 0 Sostituendo si avrà: 14

15 1EJ X 1l 6EJ X l X l EJ 6EJ 0 C 0 Sostituendo si avrà: C 1EJ X l 6EJ X l X 4l EJ 6EJ 0 D 0 Sostituendo si avrà: D 1EJ X l 6EJ X 4l EJ 0 Come si può facilmente notare, il caso si risolve con espressioni ricorsive in cui i termini presentano sempre la medesima espressione. Trattare una trave continua su più appoggi come un insieme di travi appoggiate rende più semplice la soluzione del problema iperstatico Trave doppiamente incastrata Si consideri la trave doppiamente incastrata in Errore. L'origine riferimento non è stata trovata.: Fig. 1. La trave è tre volte iperstatica; anche in questo caso possiamo problematizzare la struttura isostatica di riferimento allo scopo di mostrare come questa scelta possa semplificare di molto la soluzione del problema dell equilibrio elastico. Difatti, se ipotizziamo le strutture isostatiche di riferimento mostrate nella Fig. 1., ci rendiamo conto che la scelta dell una o dell altra non è del tutto neutra. (a) (b) Fig

16 In entrambi i casi una prima considerazione ci consente di diminuire il grado di iperstaticità. Difatti, l assenza di carichi esterni agenti lungo la direzione orizzontale annulla la reazione vincolare X. questo punto tuttavia osserviamo che mentre lo schema (a) è una struttura isostatica non simmetrica, lo schema (b) invece lo è. Quindi, lo schema (b) rappresenta una struttura simmetrica geometricamente e soggetta ad un carico simmetrico; questo ci consente di concludere che tutte le azioni esterne ed interne devono essere simmetriche e quindi che X 1 =X =X. Per lo schema (a) questa considerazione ovviamente non vale. questo punto, ci riferiamo allo schema di figura (b). Valutiamo adesso come si deformerebbe la struttura isostatica di riferimento per effetto della sola densità di carico q (Fig. 1.4): Fig. 1.4 Rispetto alla struttura iniziale doppiamente incastrata, nella struttura isostatica le sezioni e delle trave subirebbero due rotazioni q q di valore assoluto pari a: e q q 4EJ Le incognite iperstatiche X ricordano le queste due rotazioni non sono compatibili cinematicamente e si oppongono ad esse inducendo una rotazione di segno opposto di modo che la rotazione complessiva di entrambe le sezioni sia pari a zero (Fig. 1.6). Fig. 1.5 Le equazioni di compatibilità cinematica sarebbero quindi due, ma a noi ne serve una sola, per la valutazione l unica incognita X. L equazione cinematica della seziona assume la forma seguente: : q x 0 questo punto ricordiamo che X è somma di due contributi l uno diretto e l altro di trascinamento; pertanto, l equazione si particolarizza come segue: Xl Xl 0 X 4EJ 6EJ EJ 1 Determinato il valore dell incognita iperstatica, possiamo in fine, per sovrapposizione degli effetti, disegnare il diagramma che descrive l andamento della funzione momento flettente della struttura iperstatica come somma dei singoli diagrammi( Fig. 1.6): 16
 rappresenta una struttura simmetrica geometricamente e soggetta ad un carico simmetrico; questo ci consente di concludere che tutte le azioni esterne ed interne devono essere")
17 Fig

18 1.4.4 Travi appoggiate collegate da un asta Si consideri il sistema di Fig. 1.7, costituito da tre travi collegate tramite cerniere passanti (che non interrompono la continuità delle travi collegate): Fig. 1.7 Il sistema è una volta iperstatico, perché i 9 gradi di libertà dei tre corpi piani collegati sono contrastati da 10 gradi di vincolo (due cerniere esterne, due interne, e due carrelli): v>l v=6+4=10, l=9. Nella scelta del sistema isostatico di riferimento e quindi dell unica incognita iperstatica è necessario prestare molta attenzione a non rendere labile il sistema strutturale (come mostrato in figura): (a) (b) Fig
: v>l v=6+4=10, l=9.")
19 nche in questo caso ci sono vari modi per selezionare correttamente una struttura isostatica di riferimento, ma uno risulta infinitamente più conveniente degli altri. Nella figura che segue mostriamo due schemi isostatici. (a) (b) Fig. 1.9 Lo schema (a) sembra più semplice perché sceglie come incognita iperstatica una reazione vincolare esterna, mentre lo schema (b) sceglie come incognite iperstatiche delle reazioni vincolari interne. Tuttavia, lo schema (b), risulta di calcolo più semplice perchè utilizza, nella scrittura dell equazione di compatibilità associata all incognita iperstatica, delle formule di spostamento relative allo schema di trave doppiamente appoggiata. Nonostante le semplificazioni di calcolo, lo schema (b) presenta delle difficoltà concettuali che devono essere spiegate. nzitutto va chiarito perché, pur avendo eliminato ben due cerniere interne e quindi un grado di vincolo pari a quattro, l incognita iperstatica è solo una. Questa circostanza discende dal fatto che noi abbiamo riconosciuto visivamente il carattere reticolare dell asta E; essa difatti è : 1) un asta rettilinea; ) doppiamente incernierata alle estremità; ) senza carichi sul corpo dell asta ma solo sui nodi di estremità; In tal caso l asta E è soggetta a solo sforzo normale costante (di cui a priori non conosciamo né il valore né il segno) che abbiamo indicato con X, e questo sforzo normale non è altro che la forza che l asta C esercita sull asta E tramite la cerniera interna in. Viceversa l asta E esercita sull asta C la forza X uguale ed opposta. La stessa situazione si verifica ovviamente nella sezione E. Per determinare quest ultima incognita iperstatica dobbiamo scrivere un unica equazione di compatibilità cinematica. L asta E se indeformabile assialmente, fa si che i punti ed E abbiano lo stesso spostamento verticale v ve e questa equazione è l equazione che mancava. llo spostamento del punto che appartiene all asta C, concorrono il carico q e la forza X : v v q v X 19
, risulta di calcolo più semplice perchè utilizza, nella scrittura dell equazione di compatibilità associata all incognita iperstatica, delle formule di spostamento relative")
20 Mentre allo spostamento di E, appartenente all asta DF, concorre la sola forza X: v E ve (X ) Eguagliando i secondi membri avremo ve ( X ) v q v X Ricordando le espressioni di uno spostamento in mezzeria in una trave doppiamente appoggiata soggetta a carico uniformemente distribuito o a forza concentrata nella sezione centrale: Xl v E ( X ) 48EJ e indicando col segno meno gli abbassamenti, l equazione di compatibilità cinematica si particolarizza come segue: 4 Xl Xl 5 5 X 48EJ 48EJ 84 EJ 16 Noti i diagrammi della funzione momento per la struttura isostatica (Fig. 1.0), ricaviamo il diagramma della struttura di partenza per sovrapposizione degli effetti (Fig. 1.1): Fig. 1.0 Fig
, ricaviamo il diagramma della struttura di partenza per sovrapposizione degli effetti (Fig. 1.1): Fig. 1.0 Fig.")
21 Il diagramma dei momenti dell asta C ha due punti di massimo che corrispondono a punti in cui il valore del taglio è nullo. Per determinarli occorre disegnare il diagramma del taglio (Fig. 1.) che si otterrà anche esso come sovrapposizione degli effetti sull asta C del taglio provocato dal carico distribuito e del taglio provocato dalla forza concentrata. T(q) F(5/16 ) Fig. 1. 1
22 1.4.5 Trave continua su più appoggi con sbalzo Si consideri la trave in figura: Fig. 1. Si scelga, come visto sopra per le travi continue, il seguente schema isostatico di riferimento: Fig. 1.4 In un caso del genere, il modo più semplice per trattare la mensola consiste nell analizzarla a parte e sostituirla con l effetto che essa produce sulla struttura. Questa considerazione vale sempre per ogni mensola perchè pur essendo inserite in un contesto iperstatico, la mensola è un tratto isostatico la cui soluzione a priori può semplificare l analisi successiva. Nella figura seguente si mette in evidenza come per l equilibrio della mensola sono necessarie una forza F rivolta verso l altro valore pari a ed una coppia oraria del valore pari a (necessarie per equilibrare gli 8 effetti del carico q) che rappresentano la reazione del vincolo di continuità (incastro interno) della trave in. Le medesime forze eguali ed opposte sono le azioni che il vincolo di continuità trasmette al resto della trave. Fig. 1.5
23 Definito il contributo della mensola la struttura da analizzare è la seguente L effetto di Fig. 1.6 è quello di maggiorare la reazione vincolare di ma non di produrre deformazione sulla trave. In altre parole la forza agendo direttamente sul vincolo in e non provocando deformazione alcuna sulla trave, interviene nelle equazioni di compatibilità cinematica che scriveremo. Date queste premesse la struttura isostatica di riferimento è la seguente: Fig. 1.7 L equazione di compatibilità cinematica, impone che la rotazione relativa nel punto C sia nulla: C CS CD 0 Che equivale ad imporre che le due rotazioni a sinistra e a destra di C siano uguali: CS CD Si determini adesso il valore della rotazione a sinistra di C per sovrapposizione degli effetti dei contributi trasmessi dalla densità di carico q, dalla coppia X e dalla coppia : 8 CS CS ( X ) CS ( q) CS ( ) 8 Calcoliamo a parte il contributo della coppia 8
24 CS ( 8 ) 8 6 l EJ 48EJ E lo sostituiamo nell equazione di sopra insieme agli altri valori noti. Si otterrà infine : CS xl EJ 4EJ 48EJ Il valore della rotazione a destra di C, sarà invece somma dei contributi della densità di carico q e dalla coppia X : CD CD ( X ) ( q) CD Sostituendo si avrà: CD Xl EJ 4EJ Si riscriva adesso l equazione di compatibilità cinematica dalla quale ricaviamo direttamente il valore della incognita iperstatica: Xl EJ 4EJ 48EJ Xl EJ 4EJ Riordinando i membri diventa: 4EJ 4EJ 48EJ Xl EJ Sommando e semplificando: 16 X X 1.5 Una comparazione Compariamo il metodo delle forze con il metodo degli spostamenti per cogliere una serie di differenze fondamentali che ne costituiscono il portato. Nel metodo degli spostamenti, le incognite del problema sono le funzioni spostamento e rotazione sull intero corpo della trave, mentre gli strumenti risolutivi sono equazioni differenziali con annesse condizioni al condizioni al bordo. Per risolvere l equazione differenziale della linea elastica bisogna effettuare successive operazioni di integrazione che forniscono come funzioni definite a meno di costanti di integrazione. Queste ultime vanno determinate risolvendo il sistema, questa volta algebrico, delle condizioni al bodo. Il portato didattico del metodo degli spostamenti è imparare a scrivere le condizioni al bordo e/o le condizioni di continuità, riconoscendo il contenuto meccanico. 4
25 Nel metodo delle forze, le incognite sono le reazioni vincolari iperstatiche, che non sono funzioni, bensì un numero finito di valori di forze e/o coppie e/o azioni di contatto in definite sezioni della trave. Pertanto, le equazioni risolutive sono equazioni algebriche, che hanno il significato meccanico di equazioni di vincolo (dei vincoli soppressi). Il portato di questo metodo sta nella capacità di applicazione sistematica del principio di sovrapposizione degli effetti, nella comprensione profonda del comportamento cinematica dei vincoli etc. 5
7 Applicazioni ulteriori
 7 Applicazioni ulteriori 7 Applicazioni ulteriori 7.1 Strutture con maglie chiuse 7.1.1 Analisi cinematica Si consideri la struttura in figura 7.1: i gradi di libertà sono pari a l =3n c v =3 0 3 = 0,
7 Applicazioni ulteriori 7 Applicazioni ulteriori 7.1 Strutture con maglie chiuse 7.1.1 Analisi cinematica Si consideri la struttura in figura 7.1: i gradi di libertà sono pari a l =3n c v =3 0 3 = 0,
11 Teorema dei lavori virtuali
 Teorema dei lavori virtuali Teorema dei lavori virtuali Si consideri una trave ad asse rettilineo figura.). Per essa si definisce sistema carichi sollecitazioni CS) l insieme di tutte le grandezze di tipo
Teorema dei lavori virtuali Teorema dei lavori virtuali Si consideri una trave ad asse rettilineo figura.). Per essa si definisce sistema carichi sollecitazioni CS) l insieme di tutte le grandezze di tipo
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI
 APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
1) IL MOMENTO DI UNA FORZA
 IL MOMENTO DI UNA FORZA") 1) IL MOMENTO DI UNA FORZA Nell ambito dello studio dei sistemi di forze, diamo una definizione di momento: il momento è un ente statico che provoca la rotazione dei corpi. Le forze producono momenti se
1) IL MOMENTO DI UNA FORZA Nell ambito dello studio dei sistemi di forze, diamo una definizione di momento: il momento è un ente statico che provoca la rotazione dei corpi. Le forze producono momenti se
McGraw-Hill. Tutti i diritti riservati
 Copyright 004 The Companies srl e Corbusier - Progetto per il palazzo dei Soviet a Mosca 1931 Problema 1. Arco Trave di copertura Tirante bielle Membrana di copertura Fig. P1.1 Analizzare il sistema in
Copyright 004 The Companies srl e Corbusier - Progetto per il palazzo dei Soviet a Mosca 1931 Problema 1. Arco Trave di copertura Tirante bielle Membrana di copertura Fig. P1.1 Analizzare il sistema in
IL TRACCIAMENTO QUALITATIVO DEL MOMENTO FLETTENTE NEI PORTALI
 IL TRACCIAMENTO QUALITATIVO DEL MOMENTO FLETTENTE NEI PORTALI Alcune proprietà della deformata dei portali Si esaminano nel seguito alcune proprietà della deformata dei portali. Queste proprietà permettono
IL TRACCIAMENTO QUALITATIVO DEL MOMENTO FLETTENTE NEI PORTALI Alcune proprietà della deformata dei portali Si esaminano nel seguito alcune proprietà della deformata dei portali. Queste proprietà permettono
Sia data la rete di fig. 1 costituita da tre resistori,,, e da due generatori indipendenti ideali di corrente ed. Fig. 1
 Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
24 - Strutture simmetriche ed antisimmetriche
 24 - Strutture simmetriche ed antisimmetriche ü [.a. 2011-2012 : ultima revisione 1 maggio 2012] In questo capitolo si studiano strutture piane che presentano proprieta' di simmetria ed antisimmetria sia
24 - Strutture simmetriche ed antisimmetriche ü [.a. 2011-2012 : ultima revisione 1 maggio 2012] In questo capitolo si studiano strutture piane che presentano proprieta' di simmetria ed antisimmetria sia
GIROSCOPIO. Scopo dell esperienza: Teoria fisica. Verificare la relazione: ω p = bmg/iω
 GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
GIROSCOPIO Scopo dell esperienza: Verificare la relazione: ω p = bmg/iω dove ω p è la velocità angolare di precessione, ω è la velocità angolare di rotazione, I il momento principale d inerzia assiale,
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
( x) ( x) 0. Equazioni irrazionali
 ( x) 0. Equazioni irrazionali") Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
17 - I corollari di Mohr per il calcolo degli spostamenti
 17 - I corollari di ohr per il calcolo degli spostamenti ü [.a. 011-01 : ultima revisione settembre 01] Relazioni fondamentali : l' analogia In questo capitolo si utilizza la teoria dell'analogia di ohr
17 - I corollari di ohr per il calcolo degli spostamenti ü [.a. 011-01 : ultima revisione settembre 01] Relazioni fondamentali : l' analogia In questo capitolo si utilizza la teoria dell'analogia di ohr
TRAVE SU SUOLO ELASTICO
 Capitolo 3 TRAVE SU SUOLO ELASTICO (3.1) Combinando la (3.1) con la (3.2) si ottiene: (3.2) L equazione differenziale può essere così riscritta: (3.3) La soluzione dell equazione differenziale di ordine
Capitolo 3 TRAVE SU SUOLO ELASTICO (3.1) Combinando la (3.1) con la (3.2) si ottiene: (3.2) L equazione differenziale può essere così riscritta: (3.3) La soluzione dell equazione differenziale di ordine
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI
 FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
Prova d esame del 30 giugno 2010 Soluzione
 UNIVERSITÀ I PIS Facoltà di Ingegneria Meccanica nalitica e dei Continui (CS Ing. Nucleare e della Sicurezza Industriale) Scienza delle Costruzioni (C Ing. Nucleare e della Sicurezza e Protezione) Scienza
UNIVERSITÀ I PIS Facoltà di Ingegneria Meccanica nalitica e dei Continui (CS Ing. Nucleare e della Sicurezza Industriale) Scienza delle Costruzioni (C Ing. Nucleare e della Sicurezza e Protezione) Scienza
La pista del mio studio Riflettiamo sulla pista. Guida per l insegnante
 Riflettiamo sulla pista Guida per l insegnante Obiettivi educativi generali Compito di specificazione - possiede capacità progettuale - è in grado di organizzare il proprio tempo e di costruire piani per
Riflettiamo sulla pista Guida per l insegnante Obiettivi educativi generali Compito di specificazione - possiede capacità progettuale - è in grado di organizzare il proprio tempo e di costruire piani per
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo
 Momento di una forza Nella figura 1 è illustrato come forze uguali e contrarie possono non produrre equilibrio, bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo esteso.
Momento di una forza Nella figura 1 è illustrato come forze uguali e contrarie possono non produrre equilibrio, bensì una tendenza a ruotare quando vengono applicate in punti diversi di un corpo esteso.
CORPO GIREVOLE ATTORNO AD UN ASSE E MOMENTI. TORNA ALL'INDICE
 CORPO GIREVOLE ATTORNO AD UN ASSE E MOMENTI. TORNA ALL'INDICE Consideriamo adesso un corpo esteso, formato da più punti, e che abbia un asse fisso, attorno a cui il corpo può ruotare. In questo caso l
CORPO GIREVOLE ATTORNO AD UN ASSE E MOMENTI. TORNA ALL'INDICE Consideriamo adesso un corpo esteso, formato da più punti, e che abbia un asse fisso, attorno a cui il corpo può ruotare. In questo caso l
Sussidi didattici per il corso di COSTRUZIONI EDILI. Prof. Ing. Francesco Zanghì TRAVI RETICOLARI AGGIORNAMENTO DEL 7/11/2011
 Sussidi didattici per il corso di COSTRUZIONI EDILI Prof. Ing. Francesco Zanghì TRAVI RETICOLARI AGGIORNAMENTO DEL 7/11/2011 Le travi reticolari sono strutture formate da aste rettilinee, mutuamente collegate
Sussidi didattici per il corso di COSTRUZIONI EDILI Prof. Ing. Francesco Zanghì TRAVI RETICOLARI AGGIORNAMENTO DEL 7/11/2011 Le travi reticolari sono strutture formate da aste rettilinee, mutuamente collegate
Esponenziali elogaritmi
 Esponenziali elogaritmi Potenze ad esponente reale Ricordiamo che per un qualsiasi numero razionale m n prendere n>0) si pone a m n = n a m (in cui si può sempre a patto che a sia un numero reale positivo.
Esponenziali elogaritmi Potenze ad esponente reale Ricordiamo che per un qualsiasi numero razionale m n prendere n>0) si pone a m n = n a m (in cui si può sempre a patto che a sia un numero reale positivo.
Siamo così arrivati all aritmetica modulare, ma anche a individuare alcuni aspetti di come funziona l aritmetica del calcolatore come vedremo.
 DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare
 L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
GEOMETRIA DELLE MASSE
 1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
1 DISPENSA N 2 GEOMETRIA DELLE MASSE Si prende in considerazione un sistema piano, ossia giacente nel pian x-y. Un insieme di masse posizionato nel piano X-Y, rappresentato da punti individuati dalle loro
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
SISTEMI DI NUMERAZIONE E CODICI
 SISTEMI DI NUMERAZIONE E CODICI Il Sistema di Numerazione Decimale Il sistema decimale o sistema di numerazione a base dieci usa dieci cifre, dette cifre decimali, da O a 9. Il sistema decimale è un sistema
SISTEMI DI NUMERAZIONE E CODICI Il Sistema di Numerazione Decimale Il sistema decimale o sistema di numerazione a base dieci usa dieci cifre, dette cifre decimali, da O a 9. Il sistema decimale è un sistema
UNIVERSITÀ DEGLI STUDI DI TERAMO
 UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN ECONOMIA BANCARIA FINANZIARIA ED ASSICURATIVA (Classe 7) Corso di Matematica per l Economia (Prof. F. Eugeni) TEST DI INGRESSO Teramo, ottobre 00 SEZIONE
UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN ECONOMIA BANCARIA FINANZIARIA ED ASSICURATIVA (Classe 7) Corso di Matematica per l Economia (Prof. F. Eugeni) TEST DI INGRESSO Teramo, ottobre 00 SEZIONE
ESEMPIO 1: eseguire il complemento a 10 di 765
 COMPLEMENTO A 10 DI UN NUMERO DECIMALE Sia dato un numero N 10 in base 10 di n cifre. Il complemento a 10 di tale numero (N ) si ottiene sottraendo il numero stesso a 10 n. ESEMPIO 1: eseguire il complemento
COMPLEMENTO A 10 DI UN NUMERO DECIMALE Sia dato un numero N 10 in base 10 di n cifre. Il complemento a 10 di tale numero (N ) si ottiene sottraendo il numero stesso a 10 n. ESEMPIO 1: eseguire il complemento
LA RETTA. Retta per l'origine, rette orizzontali e verticali
 Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
FUNZIONI / ESERCIZI SVOLTI
 ANALISI MATEMATICA I - A.A. 0/0 FUNZIONI / ESERCIZI SVOLTI ESERCIZIO. Data la funzione f () = determinare l insieme f (( +)). Svolgimento. Poiché f (( +)) = { dom f : f () ( +)} = { dom f : f () > } si
ANALISI MATEMATICA I - A.A. 0/0 FUNZIONI / ESERCIZI SVOLTI ESERCIZIO. Data la funzione f () = determinare l insieme f (( +)). Svolgimento. Poiché f (( +)) = { dom f : f () ( +)} = { dom f : f () > } si
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
1. PRIME PROPRIETÀ 2
 RELAZIONI 1. Prime proprietà Il significato comune del concetto di relazione è facilmente intuibile: due elementi sono in relazione se c è un legame tra loro descritto da una certa proprietà; ad esempio,
RELAZIONI 1. Prime proprietà Il significato comune del concetto di relazione è facilmente intuibile: due elementi sono in relazione se c è un legame tra loro descritto da una certa proprietà; ad esempio,
Funzioni. Parte prima. Daniele Serra
 Funzioni Parte prima Daniele Serra Nota: questi appunti non sostituiscono in alcun modo le lezioni del prof. Favilli, né alcun libro di testo. Sono piuttosto da intendersi a integrazione di entrambi. 1
Funzioni Parte prima Daniele Serra Nota: questi appunti non sostituiscono in alcun modo le lezioni del prof. Favilli, né alcun libro di testo. Sono piuttosto da intendersi a integrazione di entrambi. 1
Matematica 1 - Corso di Laurea in Ingegneria Meccanica
 Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
LEZIONE 7. Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.
 e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.") 7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
9. Urti e conservazione della quantità di moto.
 9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
ESERCIZI DI MATEMATICA FINANZIARIA DIPARTIMENTO DI ECONOMIA E MANAGEMENT UNIFE A.A. 2015/2016. 1. Esercizi 4
 ESERCIZI DI MATEMATICA FINANZIARIA DIPARTIMENTO DI ECONOMIA E MANAGEMENT UNIFE A.A. 2015/2016 1. Esercizi 4 Piani di ammortamento Esercizio 1. Un debito di 1000e viene rimborsato a tasso annuo i = 10%
ESERCIZI DI MATEMATICA FINANZIARIA DIPARTIMENTO DI ECONOMIA E MANAGEMENT UNIFE A.A. 2015/2016 1. Esercizi 4 Piani di ammortamento Esercizio 1. Un debito di 1000e viene rimborsato a tasso annuo i = 10%
4 3 4 = 4 x 10 2 + 3 x 10 1 + 4 x 10 0 aaa 10 2 10 1 10 0
 Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Metodi risolutivi per le disequazioni algebriche
 Metodi risolutivi per le disequazioni algebriche v.scudero Una disequazioni algebrica si presenta in una delle quattro forme seguenti: () P( () P( (3) P( () P( essendo P( un polinomio in. Noi studieremo
Metodi risolutivi per le disequazioni algebriche v.scudero Una disequazioni algebrica si presenta in una delle quattro forme seguenti: () P( () P( (3) P( () P( essendo P( un polinomio in. Noi studieremo
APPUNTI SU PROBLEMI CON CALCOLO PERCENTUALE
 APPUNTI SU PROBLEMI CON CALCOLO PERCENTUALE 1. Proporzionalità diretta e proporzionalità inversa Analizziamo le seguenti formule Peso Lordo = Peso Netto + Tara Ricavo = Utile + Costo Rata = Importo + Interesse
APPUNTI SU PROBLEMI CON CALCOLO PERCENTUALE 1. Proporzionalità diretta e proporzionalità inversa Analizziamo le seguenti formule Peso Lordo = Peso Netto + Tara Ricavo = Utile + Costo Rata = Importo + Interesse
CONTINUITÀ E DERIVABILITÀ Esercizi risolti
 CONTINUITÀ E DERIVABILITÀ Esercizi risolti. Determinare kπ/ [cos] al variare di k in Z. Ove tale ite non esista, discutere l esistenza dei iti laterali. Identificare i punti di discontinuità della funzione
CONTINUITÀ E DERIVABILITÀ Esercizi risolti. Determinare kπ/ [cos] al variare di k in Z. Ove tale ite non esista, discutere l esistenza dei iti laterali. Identificare i punti di discontinuità della funzione
Appunti sulla Macchina di Turing. Macchina di Turing
 Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Misure di base su una carta. Calcoli di distanze
 Misure di base su una carta Calcoli di distanze Per calcolare la distanza tra due punti su una carta disegnata si opera nel modo seguente: 1. Occorre identificare la scala della carta o ricorrendo alle
Misure di base su una carta Calcoli di distanze Per calcolare la distanza tra due punti su una carta disegnata si opera nel modo seguente: 1. Occorre identificare la scala della carta o ricorrendo alle
Percorsi di matematica per il ripasso e il recupero
 Giacomo Pagina Giovanna Patri Percorsi di matematica per il ripasso e il recupero 2 per la Scuola secondaria di secondo grado UNITÀ CAMPIONE Edizioni del Quadrifoglio à t i n U 1 Sistemi di primo grado
Giacomo Pagina Giovanna Patri Percorsi di matematica per il ripasso e il recupero 2 per la Scuola secondaria di secondo grado UNITÀ CAMPIONE Edizioni del Quadrifoglio à t i n U 1 Sistemi di primo grado
IL METODO PER IMPOSTARE E RISOLVERE I PROBLEMI DI FISICA (NB non ha nulla a che vedere con il metodo scientifico)
") IL METODO PER IMPOSTARE E RISOLVERE I PROBLEMI DI FISICA (NB non ha nulla a che vedere con il metodo scientifico) [nota: Nel testo sono riportate tra virgolette alcune domande che insegnanti e studenti
IL METODO PER IMPOSTARE E RISOLVERE I PROBLEMI DI FISICA (NB non ha nulla a che vedere con il metodo scientifico) [nota: Nel testo sono riportate tra virgolette alcune domande che insegnanti e studenti
TRAVI SU SUOLO ALLA WINKLER, INTERAZIONE TERRENO-FONDAZIONE
 Università degli Studi di Palermo Facoltà di Ingegneria Dipartimento di Ingegneria Strutturale e Geotecnica TRAVI SU SUOO AA WINKER, INTERAZIONE TERRENO-FONDAZIONE Prof.. Cavaleri Ing. F. Di Trapani TRAVI
Università degli Studi di Palermo Facoltà di Ingegneria Dipartimento di Ingegneria Strutturale e Geotecnica TRAVI SU SUOO AA WINKER, INTERAZIONE TERRENO-FONDAZIONE Prof.. Cavaleri Ing. F. Di Trapani TRAVI
STRUTTURE ISOSTATICHE REAZIONI VINCOLARI ED AZIONI INTERNE
 ESERCIZI SVOLTI O CON TRACCIA DI SOLUZIONE SU STRUTTURE ISOSTATICHE REAZIONI VINCOLARI ED AZIONI INTERNE v 1.0 1 I PROVA DI VALUTAZIONE 15 Novembre 2006 - Esercizio 2 Data la struttura di figura, ricavare
ESERCIZI SVOLTI O CON TRACCIA DI SOLUZIONE SU STRUTTURE ISOSTATICHE REAZIONI VINCOLARI ED AZIONI INTERNE v 1.0 1 I PROVA DI VALUTAZIONE 15 Novembre 2006 - Esercizio 2 Data la struttura di figura, ricavare
Fondamenti e didattica di Matematica Finanziaria
 Fondamenti e didattica di Matematica Finanziaria Silvana Stefani Piazza dell Ateneo Nuovo 1-20126 MILANO U6-368 silvana.stefani@unimib.it 1 Unità 9 Contenuti della lezione Operazioni finanziarie, criterio
Fondamenti e didattica di Matematica Finanziaria Silvana Stefani Piazza dell Ateneo Nuovo 1-20126 MILANO U6-368 silvana.stefani@unimib.it 1 Unità 9 Contenuti della lezione Operazioni finanziarie, criterio
risulta (x) = 1 se x < 0.
 = 1 se x < 0.") Questo file si pone come obiettivo quello di mostrarvi come lo studio di una funzione reale di una variabile reale, nella cui espressione compare un qualche valore assoluto, possa essere svolto senza necessariamente
Questo file si pone come obiettivo quello di mostrarvi come lo studio di una funzione reale di una variabile reale, nella cui espressione compare un qualche valore assoluto, possa essere svolto senza necessariamente
FASCI DI RETTE. scrivere la retta in forma esplicita: 2y = 3x + 4 y = 3 2 x 2. scrivere l equazione del fascio di rette:
 FASCI DI RETTE DEFINIZIONE: Si chiama fascio di rette parallele o fascio improprio [erroneamente data la somiglianza effettiva con un fascio!] un insieme di rette che hanno tutte lo stesso coefficiente
FASCI DI RETTE DEFINIZIONE: Si chiama fascio di rette parallele o fascio improprio [erroneamente data la somiglianza effettiva con un fascio!] un insieme di rette che hanno tutte lo stesso coefficiente
Lezioni di Matematica 1 - I modulo
 Lezioni di Matematica 1 - I modulo Luciano Battaia 16 ottobre 2008 Luciano Battaia - http://www.batmath.it Matematica 1 - I modulo. Lezione del 16/10/2008 1 / 13 L introduzione dei numeri reali si può
Lezioni di Matematica 1 - I modulo Luciano Battaia 16 ottobre 2008 Luciano Battaia - http://www.batmath.it Matematica 1 - I modulo. Lezione del 16/10/2008 1 / 13 L introduzione dei numeri reali si può
Soluzione di equazioni quadratiche
 Soluzione di equazioni quadratiche Soluzione sulla Retta Algebrica Inseriamo sulla Retta Algebrica le seguenti espressioni polinomiali x e x 3 e cerchiamo di individuare i valori di x per i quali i punti
Soluzione di equazioni quadratiche Soluzione sulla Retta Algebrica Inseriamo sulla Retta Algebrica le seguenti espressioni polinomiali x e x 3 e cerchiamo di individuare i valori di x per i quali i punti
Esercizi di Macroeconomia per il corso di Economia Politica
 Esercizi di Macroeconomia per il corso di Economia Politica (Gli esercizi sono suddivisi in base ai capitoli del testo di De Vincenti) CAPITOLO 3. IL MERCATO DEI BENI NEL MODELLO REDDITO-SPESA Esercizio.
Esercizi di Macroeconomia per il corso di Economia Politica (Gli esercizi sono suddivisi in base ai capitoli del testo di De Vincenti) CAPITOLO 3. IL MERCATO DEI BENI NEL MODELLO REDDITO-SPESA Esercizio.
Per prima cosa si determinano le caratteristiche geometriche e meccaniche della sezione del profilo, nel nostro caso sono le seguenti;
 !""##"!$%&'((""!" )**&)+,)-./0)*$1110,)-./0)*!""##"!$%&'((""!" *&)23+-0-$4--56%--0.),0-,-%323 -&3%/ La presente relazione ha lo scopo di illustrare il meccanismo di calcolo che sta alla base del dimensionamento
!""##"!$%&'((""!" )**&)+,)-./0)*$1110,)-./0)*!""##"!$%&'((""!" *&)23+-0-$4--56%--0.),0-,-%323 -&3%/ La presente relazione ha lo scopo di illustrare il meccanismo di calcolo che sta alla base del dimensionamento
Capitolo 2. Operazione di limite
 Capitolo 2 Operazione di ite In questo capitolo vogliamo occuparci dell operazione di ite, strumento indispensabile per scoprire molte proprietà delle funzioni. D ora in avanti riguarderemo i domini A
Capitolo 2 Operazione di ite In questo capitolo vogliamo occuparci dell operazione di ite, strumento indispensabile per scoprire molte proprietà delle funzioni. D ora in avanti riguarderemo i domini A
1. Distribuzioni campionarie
 Università degli Studi di Basilicata Facoltà di Economia Corso di Laurea in Economia Aziendale - a.a. 2012/2013 lezioni di statistica del 3 e 6 giugno 2013 - di Massimo Cristallo - 1. Distribuzioni campionarie
Università degli Studi di Basilicata Facoltà di Economia Corso di Laurea in Economia Aziendale - a.a. 2012/2013 lezioni di statistica del 3 e 6 giugno 2013 - di Massimo Cristallo - 1. Distribuzioni campionarie
Capitolo 13: L offerta dell impresa e il surplus del produttore
 Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
3 GRAFICI DI FUNZIONI
 3 GRAFICI DI FUNZIONI Particolari sottoinsiemi di R che noi studieremo sono i grafici di funzioni. Il grafico di una funzione f (se non è specificato il dominio di definizione) è dato da {(x, y) : x dom
3 GRAFICI DI FUNZIONI Particolari sottoinsiemi di R che noi studieremo sono i grafici di funzioni. Il grafico di una funzione f (se non è specificato il dominio di definizione) è dato da {(x, y) : x dom
Le funzioni continue. A. Pisani Liceo Classico Dante Alighieri A.S. 2002-03. A. Pisani, appunti di Matematica 1
 Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
ESERCIZI DI MATEMATICA FINANZIARIA DIPARTIMENTO DI ECONOMIA E MANAGEMENT UNIFE A.A. 2015/2016. 1. Esercizi: lezione 24/11/2015
 ESERCIZI DI MATEMATICA FINANZIARIA DIPARTIMENTO DI ECONOMIA E MANAGEMENT UNIFE A.A. 2015/2016 1. Esercizi: lezione 24/11/2015 Valutazioni di operazioni finanziarie Esercizio 1. Un operazione finanziaria
ESERCIZI DI MATEMATICA FINANZIARIA DIPARTIMENTO DI ECONOMIA E MANAGEMENT UNIFE A.A. 2015/2016 1. Esercizi: lezione 24/11/2015 Valutazioni di operazioni finanziarie Esercizio 1. Un operazione finanziaria
Travature reticolari piane : esercizi svolti De Domenico D., Fuschi P., Pisano A., Sofi A.
 Travature reticolari piane : esercizi svolti e omenico., Fuschi., isano., Sofi. SRZO n. ata la travatura reticolare piana triangolata semplice illustrata in Figura, determinare gli sforzi normali nelle
Travature reticolari piane : esercizi svolti e omenico., Fuschi., isano., Sofi. SRZO n. ata la travatura reticolare piana triangolata semplice illustrata in Figura, determinare gli sforzi normali nelle
Vademecum studio funzione
 Vademecum studio funzione Campo di Esistenza di una funzione o dominio: Studiare una funzione significa determinare gli elementi caratteristici che ci permettono di disegnarne il grafico, a partire dalla
Vademecum studio funzione Campo di Esistenza di una funzione o dominio: Studiare una funzione significa determinare gli elementi caratteristici che ci permettono di disegnarne il grafico, a partire dalla
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Per calcolare agevolmente strutture con travi reticolari miste, tipo NPS SYSTEM di Tecnostrutture, è stato necessario introdurre in MasterSap molti
 Per calcolare agevolmente strutture con travi reticolari miste, tipo NPS SYSTEM di Tecnostrutture, è stato necessario introdurre in MasterSap molti accorgimenti indispensabili per una rapida ed efficiente
Per calcolare agevolmente strutture con travi reticolari miste, tipo NPS SYSTEM di Tecnostrutture, è stato necessario introdurre in MasterSap molti accorgimenti indispensabili per una rapida ed efficiente
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Esercitazione di Laboratorio - Leve di 1-2 - 3 genere TITOLO ESERCITAZIONE: VERIFICA DELLE LEGGI DELLE LEVE
 TITOLO ESERCITAZIONE: VERIFICA DELLE LEGGI DELLE LEVE PREREQUISITI RICHIESTI PER LO SVOLGIMENTO DELL ATTIVITÀ DI LABORATORIO L alunno deve conoscere la definizione di forza, la definizione di momento.
TITOLO ESERCITAZIONE: VERIFICA DELLE LEGGI DELLE LEVE PREREQUISITI RICHIESTI PER LO SVOLGIMENTO DELL ATTIVITÀ DI LABORATORIO L alunno deve conoscere la definizione di forza, la definizione di momento.
p atm 1. V B ; 2. T B ; 3. W A B 4. il calore specifico a volume costante c V
 1 Esercizio (tratto dal Problema 13.4 del Mazzoldi 2) Un gas ideale compie un espansione adiabatica contro la pressione atmosferica, dallo stato A di coordinate, T A, p A (tutte note, con p A > ) allo
1 Esercizio (tratto dal Problema 13.4 del Mazzoldi 2) Un gas ideale compie un espansione adiabatica contro la pressione atmosferica, dallo stato A di coordinate, T A, p A (tutte note, con p A > ) allo
Istruzioni per l uso dei programmi MomCad, TraveCon, TraveFon
 Istruzioni per l uso dei programmi MomCad, TraveCon, TraveFon I tre programmi sono utility generali preparate appositamente per gli studenti (ma che potrebbero essere utili anche per professionisti). MomCad
Istruzioni per l uso dei programmi MomCad, TraveCon, TraveFon I tre programmi sono utility generali preparate appositamente per gli studenti (ma che potrebbero essere utili anche per professionisti). MomCad
Matematica e Statistica
 Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
CONTINUITÀ E DERIVABILITÀ Esercizi proposti. 1. Determinare lim M(sinx) (M(t) denota la mantissa di t)
 (M(t) denota la mantissa di t)") CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
Indice. 1 Il settore reale --------------------------------------------------------------------------------------------- 3
 INSEGNAMENTO DI ECONOMIA POLITICA LEZIONE VI IL MERCATO REALE PROF. ALDO VASTOLA Indice 1 Il settore reale ---------------------------------------------------------------------------------------------
INSEGNAMENTO DI ECONOMIA POLITICA LEZIONE VI IL MERCATO REALE PROF. ALDO VASTOLA Indice 1 Il settore reale ---------------------------------------------------------------------------------------------
13. Campi vettoriali
 13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
13. Campi vettoriali 1 Il campo di velocità di un fluido Il concetto di campo in fisica non è limitato ai fenomeni elettrici. In generale il valore di una grandezza fisica assegnato per ogni punto dello
Modulo di Meccanica e Termodinamica
 Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
Modulo di Meccanica e Termodinamica 1) Misure e unita di misura 2) Cinematica: + Moto Rettilineo + Moto Uniformemente Accelerato [+ Vettori e Calcolo Vettoriale] + Moti Relativi 3) Dinamica: + Forza e
Fondamenti di Informatica 2. Le operazioni binarie
 Corso di per il corso di Laurea di Ingegneria Gestionale Le operazioni binarie Università degli Studi di Udine - A.A. 2010-2011 Docente Ing. Sandro Di Giusto Ph.D. 1 L'algebra binaria Il fatto di aver
Corso di per il corso di Laurea di Ingegneria Gestionale Le operazioni binarie Università degli Studi di Udine - A.A. 2010-2011 Docente Ing. Sandro Di Giusto Ph.D. 1 L'algebra binaria Il fatto di aver
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Esercizi svolti sui numeri complessi
 Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
Il principio di induzione e i numeri naturali.
 Il principio di induzione e i numeri naturali. Il principio di induzione è un potente strumento di dimostrazione, al quale si ricorre ogni volta che si debba dimostrare una proprietà in un numero infinito
Il principio di induzione e i numeri naturali. Il principio di induzione è un potente strumento di dimostrazione, al quale si ricorre ogni volta che si debba dimostrare una proprietà in un numero infinito
Esercitazione n 1: Circuiti di polarizzazione (1/2)
") Esercitazione n 1: Circuiti di polarizzazione (1/2) 1) Per il circuito in Fig. 1 determinare il valore delle resistenze R B ed R C affinché: = 3 ma - V CE = 7 V. Siano noti: = 15 V; β = 120; V BE = 0,7
Esercitazione n 1: Circuiti di polarizzazione (1/2) 1) Per il circuito in Fig. 1 determinare il valore delle resistenze R B ed R C affinché: = 3 ma - V CE = 7 V. Siano noti: = 15 V; β = 120; V BE = 0,7
2. Leggi finanziarie di capitalizzazione
 2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
MAPPE DI KARNAUGH. Nei capitoli precedenti si è visto che è possibile associare un circuito elettronico o elettrico ad una funzione logica.
 MAPPE DI KARNAUGH 1. Generalità Nei capitoli precedenti si è visto che è possibile associare un circuito elettronico o elettrico ad una funzione logica. E ovvio che più semplice è la funzione e più semplice
MAPPE DI KARNAUGH 1. Generalità Nei capitoli precedenti si è visto che è possibile associare un circuito elettronico o elettrico ad una funzione logica. E ovvio che più semplice è la funzione e più semplice
Trasformazioni Geometriche 1 Roberto Petroni, 2011
 1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
APPUNTI SUL CAMPO MAGNETICO ROTANTE
 APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
RETTE, PIANI, SFERE, CIRCONFERENZE
 RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
REGOLAZIONE (E TASSAZIONE OTTIMALE) DI UN MONOPOLIO CON PIÙ LINEE DI PRODUZIONE
 DI UN MONOPOLIO CON PIÙ LINEE DI PRODUZIONE") REGOLAZIONE (E TASSAZIONE OTTIMALE) DI UN MONOPOLIO CON PIÙ LINEE DI PRODUZIONE Nella Sezione 16.5 abbiamo visto come un regolatore che voglia fissare il prezzo del monopolista in modo da minimizzare la
REGOLAZIONE (E TASSAZIONE OTTIMALE) DI UN MONOPOLIO CON PIÙ LINEE DI PRODUZIONE Nella Sezione 16.5 abbiamo visto come un regolatore che voglia fissare il prezzo del monopolista in modo da minimizzare la
Horae. Horae Software per la Progettazione Architettonica e Strutturale
 1 IL MATERIALE X-LAM Nel programma CDSWin il materiale X-LAM pu ò essere utilizzato solo come elemento parete verticale. Quindi, dal punto di vista strutturale, il suo comportamento è prevalentemente a
1 IL MATERIALE X-LAM Nel programma CDSWin il materiale X-LAM pu ò essere utilizzato solo come elemento parete verticale. Quindi, dal punto di vista strutturale, il suo comportamento è prevalentemente a
Teoria delle code. Sistemi stazionari: M/M/1 M/M/1/K M/M/S
 Teoria delle code Sistemi stazionari: M/M/1 M/M/1/K M/M/S Fabio Giammarinaro 04/03/2008 Sommario INTRODUZIONE... 3 Formule generali di e... 3 Leggi di Little... 3 Cosa cerchiamo... 3 Legame tra N e le
Teoria delle code Sistemi stazionari: M/M/1 M/M/1/K M/M/S Fabio Giammarinaro 04/03/2008 Sommario INTRODUZIONE... 3 Formule generali di e... 3 Leggi di Little... 3 Cosa cerchiamo... 3 Legame tra N e le
Forze, leggi della dinamica, diagramma del. 28 febbraio 2009 (PIACENTINO - PREITE) Fisica per Scienze Motorie
 Fisica per Scienze Motorie") Forze, leggi della dinamica, diagramma del corpo libero 1 FORZE Grandezza fisica definibile come l' agente in grado di modificare lo stato di quiete o di moto di un corpo. Ci troviamo di fronte ad una
Forze, leggi della dinamica, diagramma del corpo libero 1 FORZE Grandezza fisica definibile come l' agente in grado di modificare lo stato di quiete o di moto di un corpo. Ci troviamo di fronte ad una
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Calcolo del Valore Attuale Netto (VAN)
") Calcolo del Valore Attuale Netto (VAN) Il calcolo del valore attuale netto (VAN) serve per determinare la redditività di un investimento. Si tratta di utilizzare un procedimento che può consentirci di
Calcolo del Valore Attuale Netto (VAN) Il calcolo del valore attuale netto (VAN) serve per determinare la redditività di un investimento. Si tratta di utilizzare un procedimento che può consentirci di
4. Operazioni aritmetiche con i numeri binari
 I Numeri Binari 4. Operazioni aritmetiche con i numeri binari Contare con i numeri binari Prima di vedere quali operazioni possiamo effettuare con i numeri binari, iniziamo ad imparare a contare in binario:
I Numeri Binari 4. Operazioni aritmetiche con i numeri binari Contare con i numeri binari Prima di vedere quali operazioni possiamo effettuare con i numeri binari, iniziamo ad imparare a contare in binario:
5 Risparmio e investimento nel lungo periodo
 5 Risparmio e investimento nel lungo periodo 5.1 Il ruolo del mercato finanziario Il ruolo macroeconomico del sistema finanziario è quello di far affluire i fondi risparmiati ai soggetti che li spendono.
5 Risparmio e investimento nel lungo periodo 5.1 Il ruolo del mercato finanziario Il ruolo macroeconomico del sistema finanziario è quello di far affluire i fondi risparmiati ai soggetti che li spendono.
Misure finanziarie del rendimento: il Van
 Misure finanziarie del rendimento: il Van 6.XI.2013 Il valore attuale netto Il valore attuale netto di un progetto si calcola per mezzo di un modello finanziario basato su stime circa i ricavi i costi
Misure finanziarie del rendimento: il Van 6.XI.2013 Il valore attuale netto Il valore attuale netto di un progetto si calcola per mezzo di un modello finanziario basato su stime circa i ricavi i costi
Macroeconomia, Esercitazione 2. 1 Esercizi. 1.1 Moneta/1. 1.2 Moneta/2. 1.3 Moneta/3. A cura di Giuseppe Gori (giuseppe.gori@unibo.
 acroeconomia, Esercitazione 2. A cura di Giuseppe Gori (giuseppe.gori@unibo.it) 1 Esercizi. 1.1 oneta/1 Sapendo che il PIL reale nel 2008 è pari a 50.000 euro e nel 2009 a 60.000 euro, che dal 2008 al
acroeconomia, Esercitazione 2. A cura di Giuseppe Gori (giuseppe.gori@unibo.it) 1 Esercizi. 1.1 oneta/1 Sapendo che il PIL reale nel 2008 è pari a 50.000 euro e nel 2009 a 60.000 euro, che dal 2008 al
INTEGRATORE E DERIVATORE REALI
 INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
la funzione è definita la funzione non è definita Si osservi, infatti, che la radice di un numero negativo non esiste nel campo dei numeri reali.
 1 y 4 CAMPO DI ESISTENZA. Poiché data è una irrazionale con indice di radice pari, il cui radicando è un polinomio, essa risulta definita solo per i valori della per i quali il radicando è positivo, ovvero
1 y 4 CAMPO DI ESISTENZA. Poiché data è una irrazionale con indice di radice pari, il cui radicando è un polinomio, essa risulta definita solo per i valori della per i quali il radicando è positivo, ovvero
Capitolo 25: Lo scambio nel mercato delle assicurazioni
 Capitolo 25: Lo scambio nel mercato delle assicurazioni 25.1: Introduzione In questo capitolo la teoria economica discussa nei capitoli 23 e 24 viene applicata all analisi dello scambio del rischio nel
Capitolo 25: Lo scambio nel mercato delle assicurazioni 25.1: Introduzione In questo capitolo la teoria economica discussa nei capitoli 23 e 24 viene applicata all analisi dello scambio del rischio nel