A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO
|
|
|
- Aniella Pucci
- 8 anni fa
- Visualizzazioni
Transcript
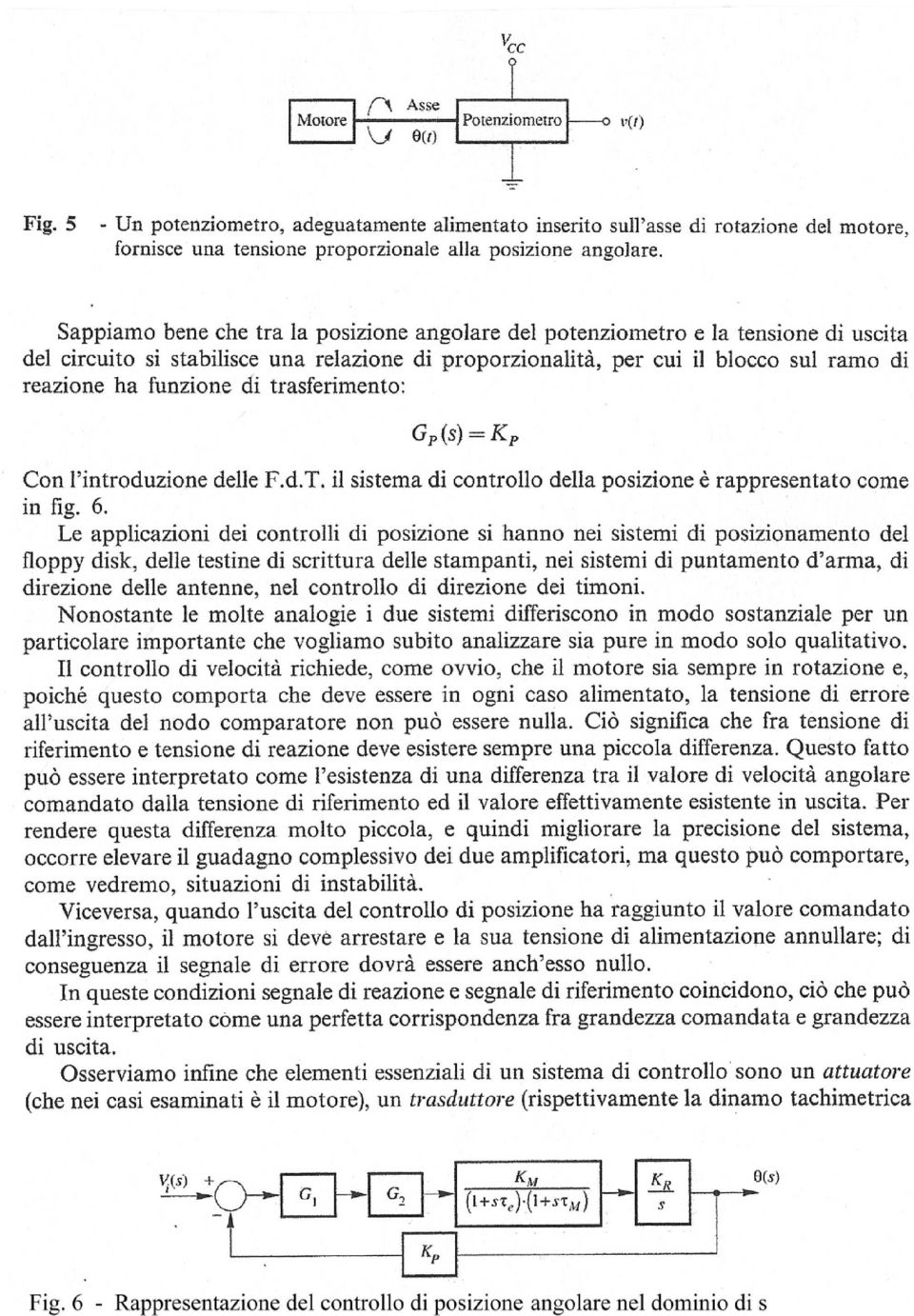
1 A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante: conoscere come si comporta un sistema nei vari domini: tempo, frequenza, piano di Gauss, trasformate di Laplace. individuare gli interventi da fare sui sistemi per fargli assumere il comportamento desiderato Il sistema di controllo preso come esempio è quello di un motore a corrente continua ad eccitazione separata. Gli argomenti sono quindi: funzioni di trasferimento (f.d.t.) nel dominio delle frequenze [diagrammi di Bode] f.d.t. nel dominio complesso [piano di Gauss (diagrammi polari Nyquist)] f.d.t. nel dominio delle Trasformate di Laplace [utilizzo delle antitrasformate per trovare la risposta nel dominio del tempo] f.d.t. di sistemi di controllo [con retroazione] per determinare: l'effetto dei disturbi (di tipo additivo e parametrici) l'errore a regime con ingressi canonici il tipo di risposta con ingressi canonici [impulso, gradino, rampa, parabola] velocità di risposta e larghezza di banda la stabilità [criteri di Bode, Nyquist e Routh-Hurwitz] reti compensatrici regolatori [PD, PI, PID] per intervenire sul comportamento del sistema il motore a corrente continua: controllo della velocità agendo sull'eccitazione separata RISPOSTA IN FREQUENZA Perché è così importante sapere come un sistema risponde alle sollecitazioni di segnali sinusoidali a frequenza variabile risposta in frequenza? Il motivo è semplice: Tutte le grandezze non sinusoidali, periodiche (per esempio l'onda quadra, l'onda triangolare, l'onda a denti di sega, lo stesso gradino inteso con periodo infinito ed altre) quando vengono applicate ad un sistema danno luogo ad una risposta (l'uscita) che dipende da come è fatto il sistema stesso, ossia dalla sua f.d.t.; Utilizzando il teorema di Fourier (che dice: qualsiasi segnale periodico, comunque variabile nel tempo, può essere scomposto nella somma di una serie di sinusoidi di ampiezza e fase opportune vedi tabella allegata) noi possiamo vedere quali sono le sinusoidi che passano amplificate/attenuate o sfasate, così da determinare se l'uscita (ottenuta come sovrapposizione delle singole sinusoidi componenti) segue o no fedelmente l'ingresso applicato. E' chiaro che i tempi di reazione dei sistemi fisici dipendono dalle costanti di tempo degli elementi che li compongono, basti pensare a τ = RC - τ = L/R dei circuiti elettrici che più si conoscono. Quindi deve essere nota la f.d.t. del sistema nel dominio delle frequenze, utilizzando la variabile [jω], come se si stesse studiando un circuito in corrente alternata. Possiamo trattare indifferentemente sistemi elettrici, meccanici, termici, idraulici ecc. partendo dalle equazioni differenziali nel dominio del tempo.
 nel dominio delle frequenze [diagrammi di Bode] f.d.t. nel dominio complesso [piano di Gauss (diagrammi polari Nyquist)] f.d.t. nel dominio delle Trasformate di Laplace [utilizzo delle antitrasformate per trovare la risposta nel dominio del tempo] f.")
2

3 Ci sono un'infinità di situazioni possibili per quanto riguarda la f.d.t. G(jω). Posso avere un circuito elettrico con resistenze, capacità, induttanze, amplificatori operazionali (che permettono di costruire degli integratori, derivatori ecc...), un sistema termico con isolanti, masse, e così via. Le f.d.t. normalmente hanno espressioni con fattori del tipo (1 + jωτ) sia a numeratore che a denominatore. Il contributo che danno i singoli fattori è del tipo: se a numeratore modulo con pendenza positiva e fase positiva (20 db/dec e + 90 ) se a denominatore modulo con pendenza negativa e fase negativa (-20 db/dec e - 90 ) Ci sono un'infinità di situazioni possibili per quanto riguarda le espressioni delle f.d.t. Le f.d.t. che destano più interesse sono quelle del 2 ordine, con la presenza a denominatore di due costanti di tempo. Per esempio il circuito RLC serie: ha le seguente equazione differenziale: e(t) = R i(t) + v L (t) + v C (t) = R i(t) + L d i(t) + v C (t) [1] dt ma: i(t) = C d v C (t) dt quindi: e(t) = RC d v C (t) + L d 2 v C (t) + v C (t) dt d t 2 come si nota abbiamo una equazione differenziale (perché ci sono le derivate) del 2 ordine (abbiamo la presenza della derivata seconda). Questa equazione dovrebbe fornire la soluzione, per esempio della v C (t), quando sono noti e(t) (che è l'ingresso preso in considerazione) e i parametri del circuito (R, L e C). Il metodo per risolvere l'equazione differenziale esiste ma non è immediato e quindi ci si appoggia a strumenti più semplici quali lo studio in frequenza oppure le trasformate di Laplace. Prima si è detto che qualsiasi grandezza può essere scomposta secondo il teorema di Fourier in somma di sinusoidi, quindi basta trovare le componenti della e(t), applicarle al circuito separatamente e vedere quali sono le componenti della v C (t), per poi sommarle ottenendo quanto cercato.
 se a denominatore modulo con pendenza negativa e fase negativa")
4 A questo punto basta studiare il circuito come se fosse in alternata, e l'espressione [1] diventa: E = R I + jω L I + 1 I jωc oppure: E = jωrc Vc + (jω) 2 LC Vc + Vc Se dovesse interessare la f.d.t. Vc/E avremo: _ Vc 1 G(jω) = = E (jω) 2 LC + jωrc + 1 A denominatore abbiamo un'equazione di 2 grado nella variabile (jω). Al variare dei parametri R, L e C abbiamo comportamenti diversi. La risposta in frequenza (modulo e fase), è la seguente:
 = ----- = ---------------------------- E (jω) 2 LC + jωrc + 1 A denominatore abbiamo")
5 Tornando alla f.d.t. ed analizzando solo il denominatore possiamo sostituire a (jω) una variabile di appoggio (s) : Vc(s) 1 1/LC k G(s) = = = = [2] E(s) s 2 LC + s RC + 1 s 2 + s R/L + 1/LC s ζ ω n s + ω n 2 dove: ω n è la pulsazione naturale ω n = 1/ LC ζ è il fattore di smorzamento ζ = τ C / 4 τ L Per certi valori di R, L e C possiamo avere della radici, dell'equazione di 2 grado, complesse e coniugate, in particolare quando ζ <= 1, ossia quando τ C 4 τ L. Le radici si chiamano anche poli della f.d.t. Nei grafici della pagina precedente si vede il comportamento del circuito al variare del fattore di smorzamento e per valori al di sotto di 0.7 abbiamo delle sovraelongazioni. L'effetto si ripercuote anche nel dominio del tempo con andamenti come nel seguente grafico: fig. 1 Quanto visto per il circuito RLC serie varrà anche per altri sistemi fisici, come può essere quello meccanico (massa-smorzatore-molla automobile) o lo stesso motore a corrente a corrente continua che ha elementi sia elettrici che meccanici e quindi più di una costante di tempo.
![------------------------ [2] E(s) s 2 LC + s RC + 1 s 2 + s R/L + 1/LC s 2 + 2 ζ ω n s + ω n 2 dove: ω n è la pulsazione naturale ω n = 1/ LC ζ è il fattore di smorzamento ζ = τ C / 4 τ L Per certi](/docs-images/44/4164151/images/page_5.jpg "valori di R, L e C possiamo avere della radici, dell'equazione di 2 grado, complesse e coniugate")
6 PIANO DI GAUSS DIAGRAMMI POLARI NYQUIST Il diagramma polare è un modo diverso da Bode per rappresentare le f.d.t. G(jω), solo che si usa un piano complesso (di Gauss) per disegnare modulo e fase al variare della pulsazione ω da 0 a +. I diagrammi di Nyquist sono tracciati con la variazione della pulsazione ω da - a +. Per i nostri scopi esamineremo solo la parte tra 0 e + (quella in blu dell'immagine). Esempio di grafico per un sistema del 2 ordine, come il circuito RLC analizzato precedentemente: Questo metodo di rappresentazione delle f.d.t. tornerà utile quando si andrà ad analizzare la stabilità di un sistema di controllo, attraverso il criterio di Nyquist.
.")
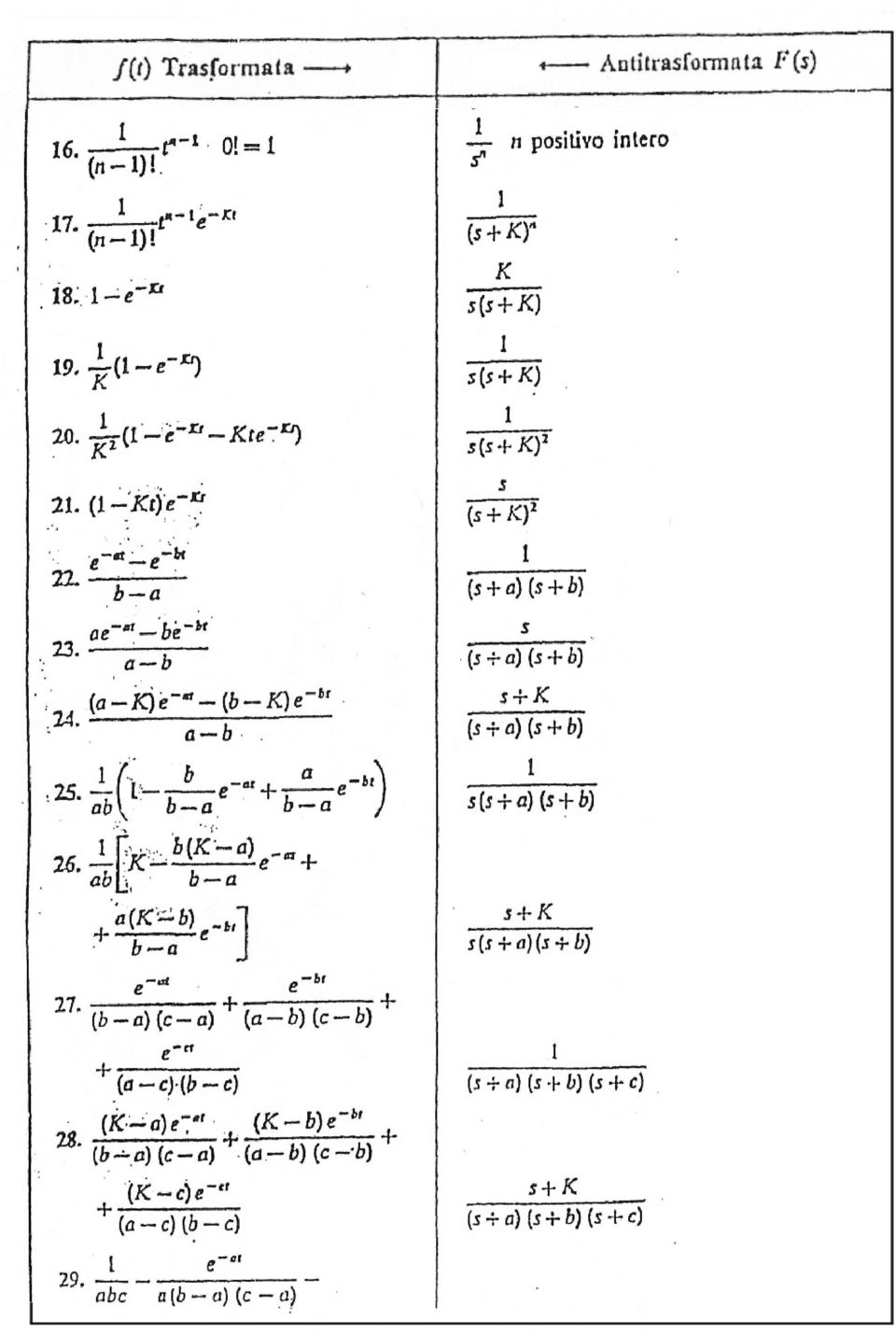
7 LE TRASFORMATE DI LAPLACE Questo importante strumento permette di risolvere per esempio le equazioni differenziali attraverso le corrispondenti equazioni algebriche (simili nell'aspetto alle equazioni nel dominio delle frequenze). Diamo intanto alcune definizioni e teoremi importanti che verranno ripresi successivamente. Definizione Si dice Trasformata di Laplace o L-trasformata della funzione reale f(t), la funzione F così definita: con s R e tale che l integrale sia convergente. La funzione F(s) si indica anche con il simbolo L[f(t)]. Teorema della derivazione e dell'integrale (molto importanti per le equazioni differenziali) Ipotesi: f(t), f '(t) e f ''(t) siano L-trasformabili e sia L[f(t)] = F(s) allora: L[f '(t)] = s F(s) - f(0) L[f ''(t)] = s 2 F(s) s f(0) f ' (0) Se poi capita che la funzione e le sue derivate sono tutte nulle in t = 0 allora le formule si semplificano e diventano: L[f '(t)] = s F(s) L[f ''(t)] = s 2 F(s) ed in generale L[f (n) (t)] = s n F(s) La trasformata dell'integrale della funzione è il rapporto tra la trasformata e la variabile s: t L[ f(t) ]= F(s)/s 0 - Teorema del valore finale: lim f(t) = lim s F(s) t s 0 Teorema del valore iniziale: lim f(t) = lim s F(s) t 0 + s Già l'espressione della f.d.t. [2] di pag.5 è in forma algebrica (si era sostituita la variabile (j ω) con
 si indica anche con il simbolo L[f(t)].")
8 la variabile (s)). Questo ci permette, utilizzando delle opportune tabelle di antitrasformazione, di ricavare l'andamento nel dominio del tempo di grandezze (considerate di uscita) quando se ne conoscono altre (considerate di ingresso). Facciamo un semplice esempio prendendo il circuito RLC serie di pag.3. Se il generatore e(t) vale 100V e lo applichiamo all'istante t=0 (gradino che vale 100), la sua trasformata di Laplace è: E(s) = 100/s la grandezza che vogliamo ricavare è la v c (t), e l'espressione che utilizziamo è la [2]: k Vc(s) = G(s) E(s) = = [3] s (s 2 LC + s RC + 1) s (s ζ ω n s + ω n2 ) conoscendo i valori di R, L e C e quindi di k, ζ e ω n avremo (se ζ 1 o τ C 4 τ L ): 100 k 100 k - ζω n t (1- ζ 2 ) v c (t) = e sen ( ω n (1- ζ 2 ) t + arctg ) [4] ω n 2 ω n 2 (1- ζ 2 ) ζ vedi la formula n.48 della tabella delle antitrasformate allegata. se ζ > 1 o τ C > 4 τ L avremo una antitrasformata più semplice, visto che le soluzioni dell'equazione di 2 a denominatore sono reali e distinte (vedi formula n.25 della tabella allegata). La rappresentazione grafica dell'equazione [4] avrà l'andamento di fig.1 di pag.5.
 vale 100V e lo applichiamo all'istante t=0 (gradino che vale 100), la sua trasformata di Laplace è: E(s) = 100/s la grandezza che vogliamo ricavare è la v c (t), e l'espressione")
9

10
11

12

13

14

15

16

17

18

19
20

21
22
23
24
25
26
27
28
29
30
31
32 Criterio generale di stabilità: un sistema è stabile se tutti i poli della funzione di trasferimento che lo descrive hanno parte reale negativa Il polinomio del denominatore della f.d.t. prende il nome di equazione caratteristica. Un sistema di controllo a catena chiusa è stabile se le radici dell'equazione caratteristica hanno parte reale negativa.
33 Se dovessimo rappresentare le radici sul piano di Gauss, per avere un sistema stabile, devono trovarsi sul semipiano di sinistra. Il piano di Gauss diventa luogo delle radici quando nella f.d.t. complessiva G cl (s) c'è la possibilità di cambiare il guadagno statico di G(s) della: G(s) G cl (s) = G(s) H(s) Per determinare velocemente se un sistema, e in particolare di controllo, è stabile abbiamo i seguenti criteri, tra matematici e grafici: Criterio di Routh-Hurwitz (matematico) E' sufficiente accertarsi che i poli della f.d.t. abbiano tutti parte reale negativa. C'è una procedura che consente di non dover ricavare i valori dei poli, ma solo di verificare se ci sono o no poli con parte reale positiva instabilità. Il criterio si divide in due parti: 1. Condizione necessaria affinché le radici di un polinomio abbiano tutte parte reale negativa è che nel polinomio siano presenti tutti i coefficienti dei termini tra quello di grado maggiore e quello costante e che abbiano tutti lo stesso segno. 2. Condizione sufficiente affinché le radici di un polinomio abbiano tutte parte reale negativa è che non si presenti inversione di segno nella prima colonna di una tabella costruita utilizzando i coefficienti del polinomio. Per come costruire la tabella fare riferimento agli esercizi fatti in classe e al testo. Il criterio di Routh-Hurwitz permette comunque il valore del guadagno limite oltre il quale il sistema può andare in instabilità. Criterio di Nyquist ristretto (grafico) Si basa sulla rappresentazione grafica sul piano di Gauss della f.d.t. ad anello aperto G(s)H(s). Premesso che un sistema normalmente è stabile in assenza di controllo e che può diventare instabile a causa della retroazione che ne consente il controllo, significa che la f.d.t. ad anello aperto G(s)H(s) non ha né zeri né poli con parte reale positiva (cioè a sfasamento minimo); questo permette di scrivere il seguente criterio: Criterio di Nyquist in forma ristretta: un sistema, a sfasamento minimo, è stabile solo se la curva di Nyquist della risposta in frequenza a catena aperta non circonda il punto del piano di coordinate -1 + j0. Ci sono due indicatori in grado di fornire elementi sull'andamento della risposta al gradino di un sistema di controllo: il margine di fase ed il margine di guadagno.
34 Il margine di fase è l'angolo di cui deve essere incrementata la fase della risposta in frequenza a guadagno unitario (intersezione della curva con la circonferenza di raggio unitario) perché raggiunga il valore di Il margine di guadagno è il valore di cui deve essere incrementato il guadagno della risposta in frequenza per raggiungere il valore unitario in corrispondenza della fase Criterio di Bode (grafico) Rappresentare la risposta in frequenza con i diagrammi di Bode asintotici del modulo e della fase è più semplice che non rappresentarla con il diagramma di Nyquist. Il criterio di Bode è la riproposizione del criterio ristretto di Nyquist, con una formulazione duplice a seconda che si utilizzi il diagramma dei moduli o delle fasi: Un sistema è stabile se il valore del modulo (espresso in db) della risposta in frequenza a catena aperta, in corrispondenza alla pulsazione per la quale si ha una fase pari a -180, è negativo. Un sistema è stabile se il valore della fase della risposta in frequenza a catena aperta, in corrispondenza alla pulsazione per la quale il modulo espresso in db è nullo, ha valore assoluto minore di 180. Con i diagrammi di Bode del modulo e della fase è immediato trovare il valore del margine di fase e di guadagno. Del criterio di Bode esiste una versione approssimata, applicabile solo se il diagramma di Bode della G(s)H(s) taglia una sola volta l'asse delle pulsazioni ω. Le regole sono: se la pendenza con cui il grafico di GH interseca l'asse w è 20 db/dec, il sistema è stabile. se la pendenza con cui GH taglia l'asse w è 40 db/dec, il sistema può risultare: 1. incerto se l'intersezione avviene vicino al passaggio da -20 db/dec a -40 db/dec e in tal caso occorre applicare il criterio di Bode vero e proprio 2. instabile se l'intersezione non avviene vicino al passaggio da -20 db/dec a -40 db/dec. Nel caso GH tagli l'asse con pendenza 60 db/dec o maggiore, il sistema è sicuramente instabile.
35
36
37
38
39
40
41
42
43
44
45
46 ELENCO DOMANDE PER LA TERZA PROVA E PER IL COLLOQUIO 1. Definizione e criterio generale di stabilità 2. Cos'è l'equazione caratteristica? Produrre un esempio 3. Qual è il criterio di Routh-Hurwitz? 4. Applicare il criterio di Routh-Hurwitz all'equazione caratteristica: 3 s s s + 7 (o altra espressione) 5. A cosa servono le trasformate di Laplace? 6. Le due formulazioni del criterio di Bode sulla stabilità 7. Cos'è il diagramma polare di una f.d.t.? 8. Come si ricava l'espressione GH =(δ ε) / ε? 9. Cos'è il luogo delle radici? 10. In un sistema di controllo quali sono gli effetti positivi e quelli negativi prodotti da un aumento del guadagno statico d'anello GH? 11. Come si determina il tipo di sistema e se un sistema è classificato di tipo 0 qual è l'errore a regime se l'ingresso è una rampa unitaria? Dimostrare. 12. Se un sistema è classificato di tipo 1 qual è, con dimostrazione, l'errore a regime se l'ingresso è un gradino unitario? 13. Ricavare l'equazione nel tempo della tensione ai capi del condensatore nel transitorio di carica nel circuito RC serie con le trasformate di Laplace. 14. L'equazione differenziale del circuito RLC serie e la corrispondente equazione alle trasformate di Laplace. 15. Descrivere i componenti di un sistema di controllo della velocità di un motore a corrente continua. 16. A cosa servono i regolatori PI, PD, PID e come si possono realizzare? 17. Cosa sono i disturbi additivi e parametrici? N.B. Tutte le domande sono per il colloquio. Le domande da 1 a 12 valgono per la 3 a prova
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
Elettronica e Telecomunicazioni Classe Quinta. La trasformata di Laplace
 Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
Trasformate di Laplace
 TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Funzioni di trasferimento. Lezione 14 2
 Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Istituto d Istruzione Secondaria Superiore M.BARTOLO. A cura del Prof S. Giannitto
 Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Introduzione. Margine di ampiezza... 2 Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di Bode... 6
 ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Il luogo delle radici (ver. 1.0)
") Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica
 Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. Analisi
Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. Analisi
ESERCITAZIONE (7-11-13) Ing. Stefano Botelli
 Ing. Stefano Botelli") FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Le funzioni continue. A. Pisani Liceo Classico Dante Alighieri A.S. 2002-03. A. Pisani, appunti di Matematica 1
 Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
La funzione di trasferimento
 Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]
![Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]](/thumbs/24/2724545.jpg "Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]") Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [caporale@elet.polimi.it] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [caporale@elet.polimi.it] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
UNIVERSITÀ DEGLI STUDI DI TERAMO
 UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN ECONOMIA BANCARIA FINANZIARIA ED ASSICURATIVA (Classe 7) Corso di Matematica per l Economia (Prof. F. Eugeni) TEST DI INGRESSO Teramo, ottobre 00 SEZIONE
UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN ECONOMIA BANCARIA FINANZIARIA ED ASSICURATIVA (Classe 7) Corso di Matematica per l Economia (Prof. F. Eugeni) TEST DI INGRESSO Teramo, ottobre 00 SEZIONE
Vademecum studio funzione
 Vademecum studio funzione Campo di Esistenza di una funzione o dominio: Studiare una funzione significa determinare gli elementi caratteristici che ci permettono di disegnarne il grafico, a partire dalla
Vademecum studio funzione Campo di Esistenza di una funzione o dominio: Studiare una funzione significa determinare gli elementi caratteristici che ci permettono di disegnarne il grafico, a partire dalla
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI
 119 4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI Indice degli Argomenti: TEMA N. 1 : INSIEMI NUMERICI E CALCOLO
119 4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI Indice degli Argomenti: TEMA N. 1 : INSIEMI NUMERICI E CALCOLO
Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza p. 2
 Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza Valentino Liberali Dipartimento di Tecnologie dell Informazione Università di Milano, 26013
Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza Valentino Liberali Dipartimento di Tecnologie dell Informazione Università di Milano, 26013
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
INTEGRATORE E DERIVATORE REALI
 INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO
 LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica. Unità 2 Calcolo del movimento di sistemi dinamici LTI
 Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Diagrammi di Bode. I Diagrammi di Bode sono due: 1) il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione
 il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione") 0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
LA RETTA. Retta per l'origine, rette orizzontali e verticali
 Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Matematica e Statistica
 Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Studio nel dominio del tempo. Le correnti sulla resistenza e sul condensatore, considerando che il punto M è a massa virtuale, valgono:
 INTEGRATORE E DERIVATORE Oltre le quattro operazioni matematiche (addizione, sottrazione, moltiplicazione, divisione) l A.O. è in grado di compiere anche altre operazioni tra le quali parecchio importanti
INTEGRATORE E DERIVATORE Oltre le quattro operazioni matematiche (addizione, sottrazione, moltiplicazione, divisione) l A.O. è in grado di compiere anche altre operazioni tra le quali parecchio importanti
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
Sia data la rete di fig. 1 costituita da tre resistori,,, e da due generatori indipendenti ideali di corrente ed. Fig. 1
 Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
RISONANZA. Introduzione. Risonanza Serie.
 RISONANZA Introduzione. Sia data una rete elettrica passiva, con elementi resistivi e reattivi, alimentata con un generatore di tensione sinusoidale a frequenza variabile. La tensione di alimentazione
RISONANZA Introduzione. Sia data una rete elettrica passiva, con elementi resistivi e reattivi, alimentata con un generatore di tensione sinusoidale a frequenza variabile. La tensione di alimentazione
Matematica generale CTF
 Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Potenza elettrica nei circuiti in regime sinusoidale
 Per gli Istituti Tecnici Industriali e Professionali Potenza elettrica nei circuiti in regime sinusoidale A cura del Prof. Chirizzi Marco www.elettrone.altervista.org 2010/2011 POTENZA ELETTRICA NEI CIRCUITI
Per gli Istituti Tecnici Industriali e Professionali Potenza elettrica nei circuiti in regime sinusoidale A cura del Prof. Chirizzi Marco www.elettrone.altervista.org 2010/2011 POTENZA ELETTRICA NEI CIRCUITI
Lez. 17/12/13 Funzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione
 Lez. 7/2/3 unzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione consideriamo il risultato del filtro passa alto che si può rappresentare schematicamente nel
Lez. 7/2/3 unzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione consideriamo il risultato del filtro passa alto che si può rappresentare schematicamente nel
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Lezione 5. Schemi a blocchi
 Lezione 5 Schemi a blocchi Elementi costitutivi di uno schema a blocchi Gli schemi a blocchi costituiscono un formalismo per rappresentare graficamente le interazioni tra sistemi dinamici. Vediamone gli
Lezione 5 Schemi a blocchi Elementi costitutivi di uno schema a blocchi Gli schemi a blocchi costituiscono un formalismo per rappresentare graficamente le interazioni tra sistemi dinamici. Vediamone gli
MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO
 PIANO DI LAVORO CLASSE 5 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: ALGEBRA DEGLI SCHEMI A BLOCCHI
PIANO DI LAVORO CLASSE 5 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: ALGEBRA DEGLI SCHEMI A BLOCCHI
LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE
 LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE MODULO : Analisi dei circuiti lineari in regime sinusoidale PREMESSA L analisi dei sistemi elettrici lineari, in regime sinusoidale, consente di determinare
LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE MODULO : Analisi dei circuiti lineari in regime sinusoidale PREMESSA L analisi dei sistemi elettrici lineari, in regime sinusoidale, consente di determinare
Capitolo 1 ANALISI COMPLESSA
 Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Tesina di Identificazione dei Modelli e Analisi dei Dati
 Tesina di Identificazione dei Modelli e Analisi dei Dati Ceccarelli Egidio e Papi Alessio 19 Luglio 2000 1 Indice 1 Introduzione 3 2 Valutazioni relative all identificazione 3 3 Prove 4 4 Conclusioni 5
Tesina di Identificazione dei Modelli e Analisi dei Dati Ceccarelli Egidio e Papi Alessio 19 Luglio 2000 1 Indice 1 Introduzione 3 2 Valutazioni relative all identificazione 3 3 Prove 4 4 Conclusioni 5
Matematica generale CTF
 Equazioni differenziali 9 dicembre 2015 Si chiamano equazioni differenziali quelle equazioni le cui incognite non sono variabili reali ma funzioni di una o più variabili. Le equazioni differenziali possono
Equazioni differenziali 9 dicembre 2015 Si chiamano equazioni differenziali quelle equazioni le cui incognite non sono variabili reali ma funzioni di una o più variabili. Le equazioni differenziali possono
GRANDEZZE SINUSOIDALI
 GRANDEE SINUSOIDALI INDICE -Grandezze variabili. -Grandezze periodiche. 3-Parametri delle grandezze periodiche. 4-Grandezze alternate. 5-Grandezze sinusoidali. 6-Parametri delle grandezze sinusoidali.
GRANDEE SINUSOIDALI INDICE -Grandezze variabili. -Grandezze periodiche. 3-Parametri delle grandezze periodiche. 4-Grandezze alternate. 5-Grandezze sinusoidali. 6-Parametri delle grandezze sinusoidali.
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
GRANDEZZE ALTERNATE SINUSOIDALI
 GRANDEZZE ALTERNATE SINUSOIDALI 1 Nel campo elettrotecnico-elettronico, per indicare una qualsiasi grandezza elettrica si usa molto spesso il termine di segnale. L insieme dei valori istantanei assunti
GRANDEZZE ALTERNATE SINUSOIDALI 1 Nel campo elettrotecnico-elettronico, per indicare una qualsiasi grandezza elettrica si usa molto spesso il termine di segnale. L insieme dei valori istantanei assunti
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Il Campionameto dei segnali e la loro rappresentazione. 1 e prende il nome frequenza di
 Il Campionameto dei segnali e la loro rappresentazione Il campionamento consente, partendo da un segnale a tempo continuo ovvero che fluisce con continuità nel tempo, di ottenere un segnale a tempo discreto,
Il Campionameto dei segnali e la loro rappresentazione Il campionamento consente, partendo da un segnale a tempo continuo ovvero che fluisce con continuità nel tempo, di ottenere un segnale a tempo discreto,
1 Serie di Taylor di una funzione
 Analisi Matematica 2 CORSO DI STUDI IN SMID CORSO DI ANALISI MATEMATICA 2 CAPITOLO 7 SERIE E POLINOMI DI TAYLOR Serie di Taylor di una funzione. Definizione di serie di Taylor Sia f(x) una funzione definita
Analisi Matematica 2 CORSO DI STUDI IN SMID CORSO DI ANALISI MATEMATICA 2 CAPITOLO 7 SERIE E POLINOMI DI TAYLOR Serie di Taylor di una funzione. Definizione di serie di Taylor Sia f(x) una funzione definita
DOMINIO E LIMITI. Esercizio 3 Studiare gli insiemi di livello della funzione f, nei seguenti casi: 1) f(x,y) = y2 x 2 + y 2.
 f(x,y) = y2 x 2 + y 2.") FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
ELETTRONICA. L amplificatore Operazionale
 ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
BLOCCO AMPLIFICATORE. Amplificatore ideale. ELETTRONICA 1 per Ingegneria Biomedica Prof. Sergio Cova
 ELETTRONIC per Ingegneria Biomedica Prof. Sergio Cova BLOCCO MPLIFICTORE v i È un circuito integrato v i v v v i quindi v i mplificatore ideale resistenza di ingresso corrente assorbita dagli ingressi
ELETTRONIC per Ingegneria Biomedica Prof. Sergio Cova BLOCCO MPLIFICTORE v i È un circuito integrato v i v v v i quindi v i mplificatore ideale resistenza di ingresso corrente assorbita dagli ingressi
Sistema dinamico a tempo continuo
 Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
analisi di sistemi retroazionati (2)
") : analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano lovera@elet.polimi.it Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
: analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano lovera@elet.polimi.it Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Funzioni inverse Simmetrie rispetto alla bisettrice dei quadranti dispari. Consideriamo la trasformazione descritta dalle equazioni : = y
 Funzioni inverse Simmetrie rispetto alla bisettrice dei quadranti dispari. Consideriamo la trasformazione descritta dalle equazioni : ' = y y' = Consideriamo il punto P(,5) se eseguiamo tra trasformazione
Funzioni inverse Simmetrie rispetto alla bisettrice dei quadranti dispari. Consideriamo la trasformazione descritta dalle equazioni : ' = y y' = Consideriamo il punto P(,5) se eseguiamo tra trasformazione
CORSO di AUTOMAZIONE INDUSTRIALE
 CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI
 CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI Abbiamo studiato successioni e serie numeriche, ora vogliamo studiare successioni e serie di funzioni. Dato un insieme A R, chiamiamo successione di funzioni
CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI Abbiamo studiato successioni e serie numeriche, ora vogliamo studiare successioni e serie di funzioni. Dato un insieme A R, chiamiamo successione di funzioni
Risposta temporale: esercizi
 ...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
TRANSITORI BJT visto dal basso
 TRANSITORI BJT visto dal basso Il transistore BJT viene indicato con il simbolo in alto a sinistra, mentre nella figura a destra abbiamo riportato la vista dal basso e laterale di un dispositivo reale.
TRANSITORI BJT visto dal basso Il transistore BJT viene indicato con il simbolo in alto a sinistra, mentre nella figura a destra abbiamo riportato la vista dal basso e laterale di un dispositivo reale.
Formule trigonometriche
 Formule trigonometriche C. Enrico F. Bonaldi 1 Formule trigonometriche In trigonometria esistono delle formule fondamentali che permettono di calcolare le funzioni goniometriche della somma di due angoli
Formule trigonometriche C. Enrico F. Bonaldi 1 Formule trigonometriche In trigonometria esistono delle formule fondamentali che permettono di calcolare le funzioni goniometriche della somma di due angoli
di Heaveside: ricaviamo:. Associamo alle grandezze sinusoidali i corrispondenti fasori:, Adesso sostituiamo nella
 Equazione di Ohm nel dominio fasoriale: Legge di Ohm:. Dalla definizione di operatore di Heaveside: ricaviamo:. Associamo alle grandezze sinusoidali i corrispondenti fasori:, dove Adesso sostituiamo nella
Equazione di Ohm nel dominio fasoriale: Legge di Ohm:. Dalla definizione di operatore di Heaveside: ricaviamo:. Associamo alle grandezze sinusoidali i corrispondenti fasori:, dove Adesso sostituiamo nella
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Proof. Dimostrazione per assurdo. Consideriamo l insieme complementare di P nell insieme
 G Pareschi Principio di induzione Il Principio di Induzione (che dovreste anche avere incontrato nel Corso di Analisi I) consente di dimostrare Proposizioni il cui enunciato è in funzione di un numero
G Pareschi Principio di induzione Il Principio di Induzione (che dovreste anche avere incontrato nel Corso di Analisi I) consente di dimostrare Proposizioni il cui enunciato è in funzione di un numero
Analisi Mat. 1 - Ing. Inform. - Soluzioni del compito del 23-3-06
 Analisi Mat. - Ing. Inform. - Soluzioni del compito del 3-3-6 Sia p il polinomio di quarto grado definito da pz = z 4. Sia S il settore circolare formato dai numeri complessi che hanno modulo minore o
Analisi Mat. - Ing. Inform. - Soluzioni del compito del 3-3-6 Sia p il polinomio di quarto grado definito da pz = z 4. Sia S il settore circolare formato dai numeri complessi che hanno modulo minore o
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
APPUNTI SUL CAMPO MAGNETICO ROTANTE
 APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
APPUTI UL CAPO AGETICO ROTATE Campo agnetico Rotante ad una coppia polare Consideriamo la struttura in figura che rappresenta la vista, in sezione trasversale, di un cilindro cavo, costituito da un materiale
LEZIONE 7. Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.
 e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.") 7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
Esercizi svolti. 1. Si consideri la funzione f(x) = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di
 = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di") Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi di Macroeconomia per il corso di Economia Politica
 Esercizi di Macroeconomia per il corso di Economia Politica (Gli esercizi sono suddivisi in base ai capitoli del testo di De Vincenti) CAPITOLO 3. IL MERCATO DEI BENI NEL MODELLO REDDITO-SPESA Esercizio.
Esercizi di Macroeconomia per il corso di Economia Politica (Gli esercizi sono suddivisi in base ai capitoli del testo di De Vincenti) CAPITOLO 3. IL MERCATO DEI BENI NEL MODELLO REDDITO-SPESA Esercizio.
Basi di matematica per il corso di micro
 Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI
 APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
bipolari, quando essi, al variare del tempo, assumono valori sia positivi che negativi unipolari, quando essi non cambiano mai segno
 Parametri dei segnali periodici I segnali, periodici e non periodici, si suddividono in: bipolari, quando essi, al variare del tempo, assumono valori sia positivi che negativi unipolari, quando essi non
Parametri dei segnali periodici I segnali, periodici e non periodici, si suddividono in: bipolari, quando essi, al variare del tempo, assumono valori sia positivi che negativi unipolari, quando essi non
Fondamenti di Automatica - I Parte Il progetto del controllore
 Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Comportamento in frequenza degli amplificatori
 Comportamento in degli amplificatori Il guadagno e tutte le grandezze che caratterizzano un amplificatore sono funzione della (cioè AA(f ), in in (f ), out out (f ), etc.). Questo perché con il crescere
Comportamento in degli amplificatori Il guadagno e tutte le grandezze che caratterizzano un amplificatore sono funzione della (cioè AA(f ), in in (f ), out out (f ), etc.). Questo perché con il crescere
Anno 4 Grafico di funzione
 Anno 4 Grafico di funzione Introduzione In questa lezione impareremo a disegnare il grafico di una funzione reale. Per fare ciò è necessario studiare alcune caratteristiche salienti della funzione che
Anno 4 Grafico di funzione Introduzione In questa lezione impareremo a disegnare il grafico di una funzione reale. Per fare ciò è necessario studiare alcune caratteristiche salienti della funzione che