LA GEOMETRIA ANALITICA DELLO SPAZIO. Liceo G. GALILEI - Verona Venerdì 10 Aprile 2015 CONVEGNO MATHESIS VERONA
|
|
|
- Benedetto Pavone
- 8 anni fa
- Visualizzazioni
Transcript
1 LA GEOMETRIA ANALITICA DELLO SPAZIO CONVEGNO MATHESIS Liceo G. GALILEI - Verona Venerdì 10 Aprile 2015

2 Perché Assenza di ogni riferimento alla geometria analitica dello spazio nel quadri di Mondrian La geometria analitica dello spazio è una delle novità principali previste dalle indicazioni nazionali nel riordino dei licei Permette di utilizzare l'algebra lineare e vettoriale É uno degli argomenti peggio (bis)trattati nei libri di testo
trattati nei libri")
3 Dalle indicazioni nazionali PRIMO BIENNIO - algebra [Lo studente] Studierà i concetti di vettore, di dipendenza e indipendenza lineare, di prodotto scalare e vettoriale nel piano e nello spazio nonché gli elementi del calcolo matriciale. QUINTO ANNNO geometria L'introduzione delle coordinate cartesiane nello spazio permetterà allo studente di studiare dal punto di vista analitico rette, piani e sfere.

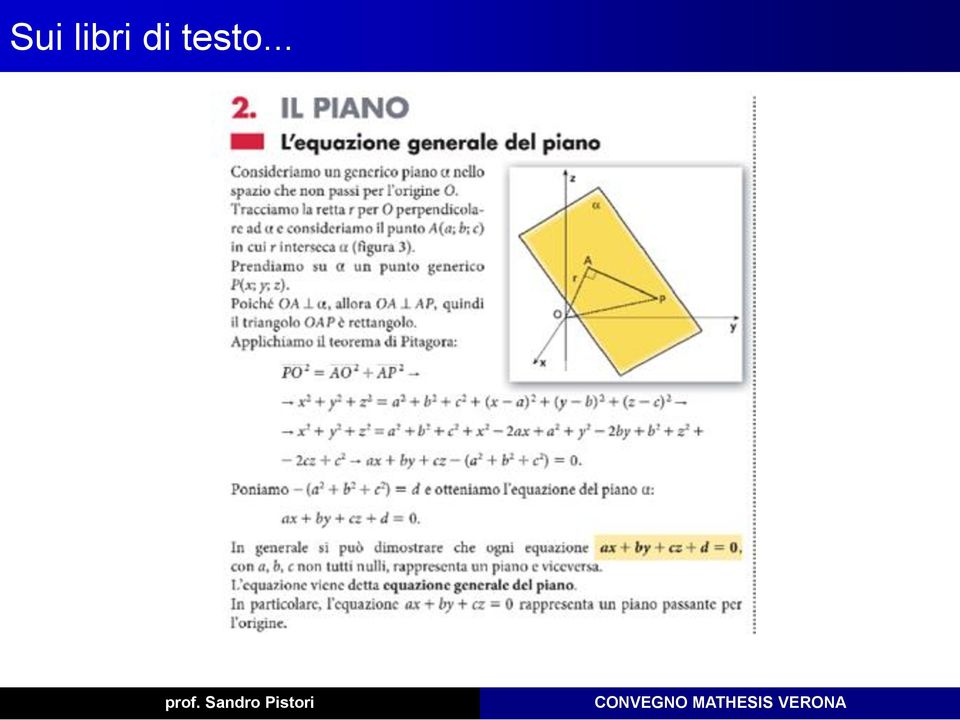
4 Sui libri di testo...

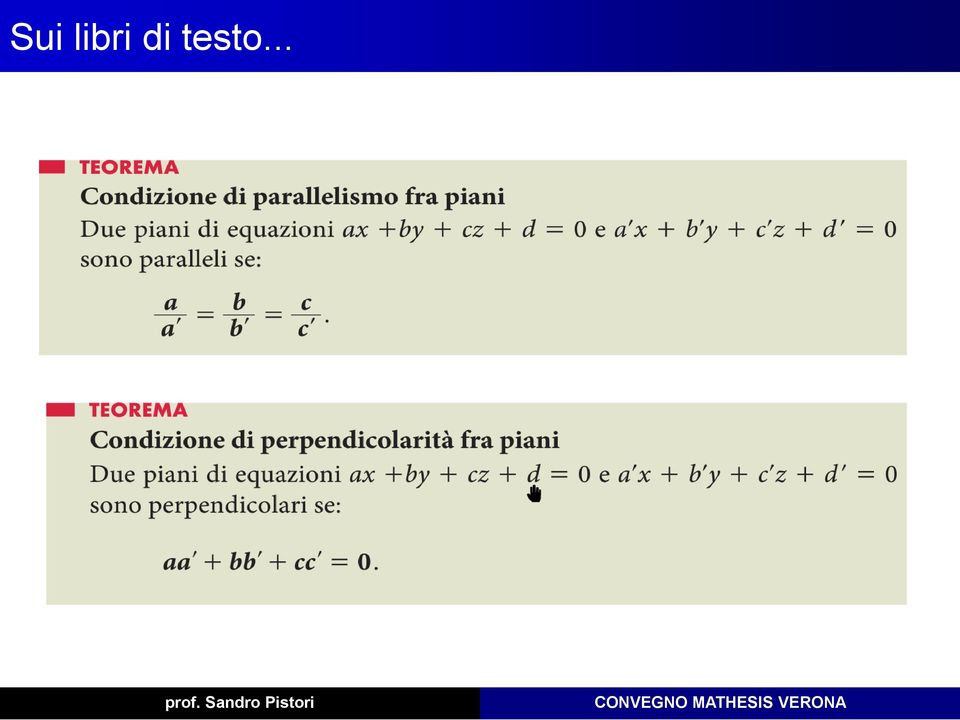
5 Sui libri di testo...
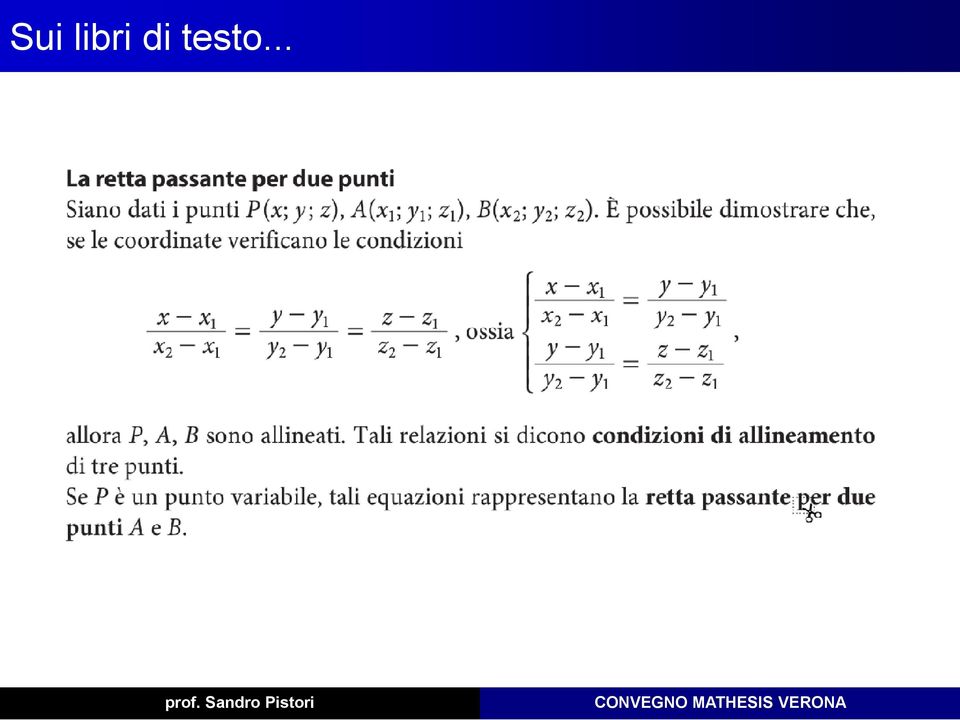
6 Sui libri di testo...
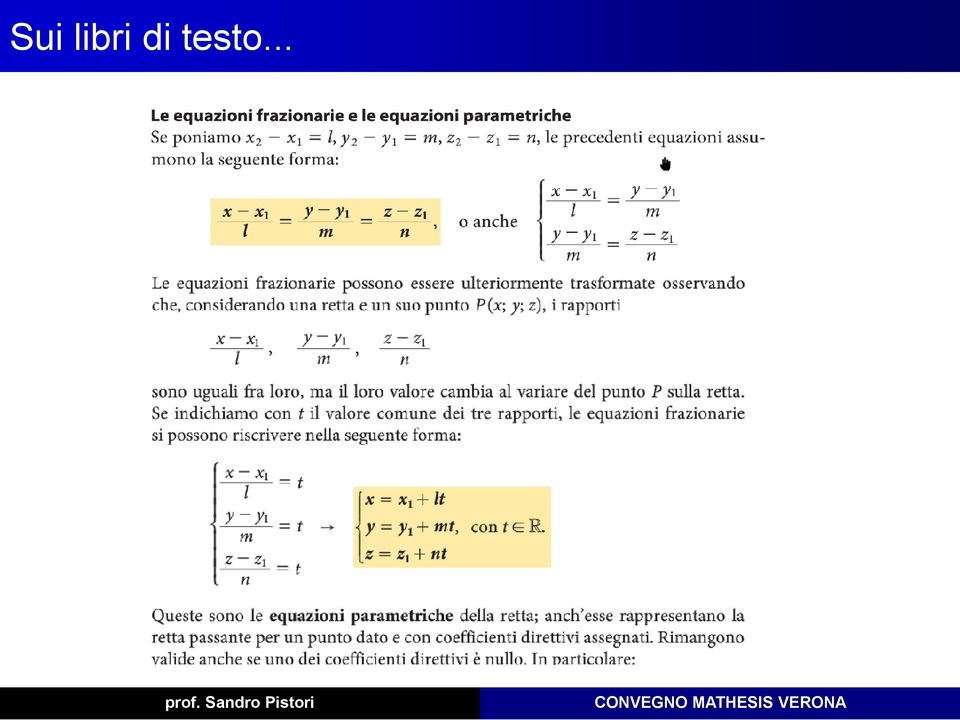
7 Sui libri di testo...
8 Prerequisiti Saper operare con le matrici (quadrate di ordine 3) Saper operare con i vettori in componenti cartesiane Conoscere condizione di dipendenza lineare di un insieme di vettori Prodotto scalare e vettoriale di due vettori


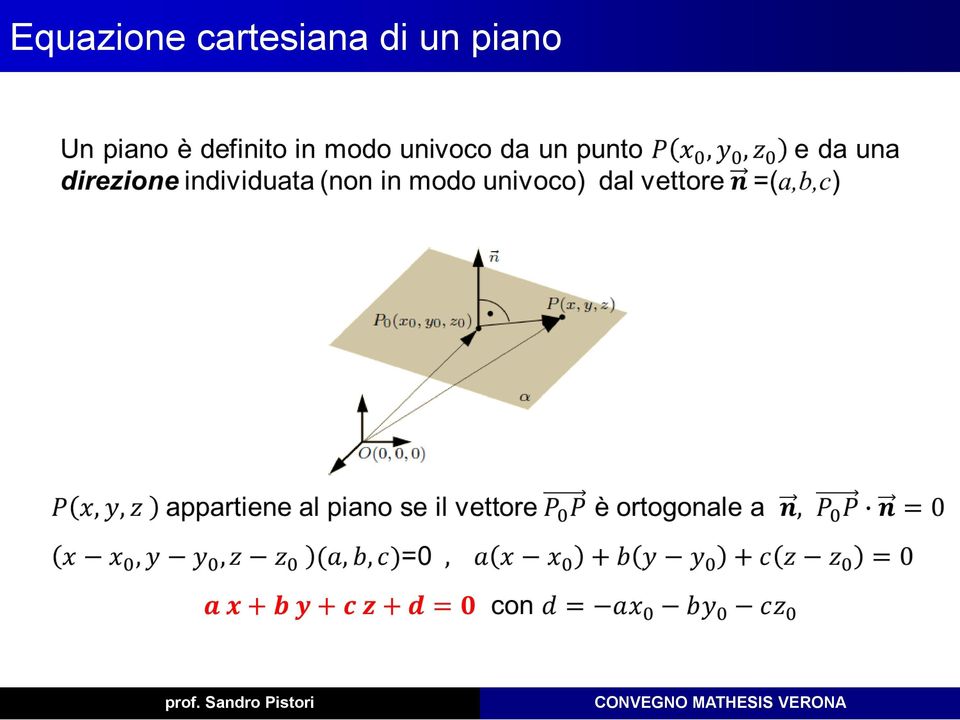
9 Equazione cartesiana di un piano
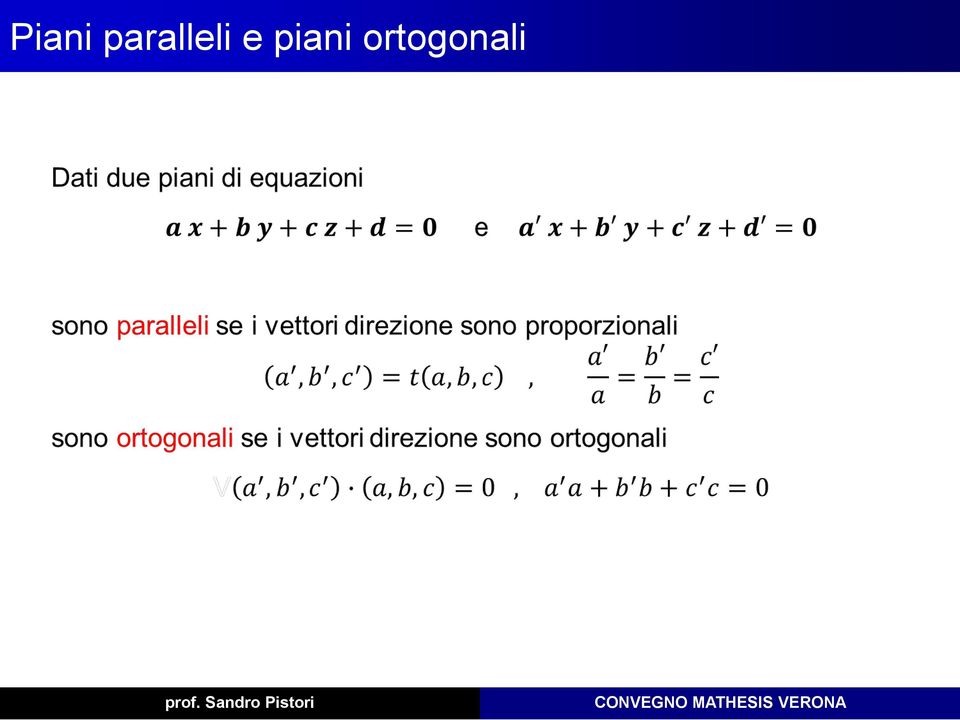
10 Piani paralleli e piani ortogonali

11 Equazione parametrica di un piano
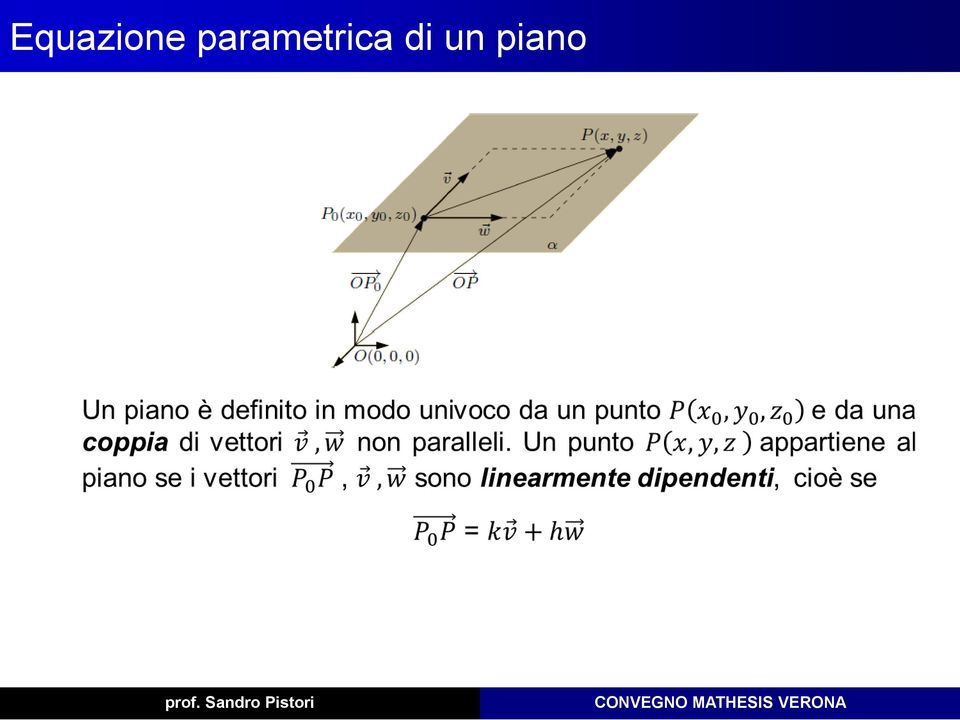
12 Gli Equazione Elementi: cartesiana parametrica definizioni di di un un piano Scrivendo esplicitamente le componenti otteniamo x x 0 = kv 1 + hw 1 y y 0 = kv 2 + hw 2 z z 0 = kv 3 + hw 3 da cui x = x 0 + kv 1 + hw 1 y = y 0 + kv 2 + hw 2 z = z 0 + kv 3 + hw 3 che rappresenta l equazione parametrica di un piano

13 Gli Equazione Dall equazione Elementi: cartesiana definizioni parametrica di un piano alla cartesiana Per passare dall equazione parametrica a quella cartesiana si può operare algebricamente sulle equazioni ricavandosi i parametri k, h oppure determinare il vettore direzione del piano attraverso il prodotto vettoriale n = v w e quindi arrivare direttamente all equazione a x x 0 + b y y 0 + c z z 0 = 0 oppure imporre che i vettori P 0 P, v, w siano linearmente dipendenti cioè x x 0 y y 0 z z 0 v 1 v 2 v 3 = 0 w 1 w 2 w 3

14 Equazione parametrica di una retta Una retta nello spazio è determinata univocamente da un punto P(x 0, y 0, z 0 ) e da una direzione fissata da un vettore (direttore) v = (v 1, v 2, v 3 ) Un punto P(x, y,z) appartiene alla retta r se i vettori P 0 P e v sono collineari (paralleli, linearmente dipendenti) quindi se P 0 P = λ v
")
15 Equazione parametrica di una retta Da cui x x 0 = λv 1 y y 0 = λv 2 z z 0 = λv 3 x = x 0 + λv 1 y = y 0 + λv 2 z = z 0 + λv 3

16 Retta passante per due punti Dati i punti A(x A, y A, z A ) e B x B, y B, z B determinare l equazione della retta r passante per A, B AB = (x B x A, y B y A,z B z A ) è il vettore direzione della retta r e quindi una possibile equazione parametrica di r sarà x = x A + λ(x B x A ) y = y A + λ(y B y A ) z = z A + λ(z B z A ) oppure considerato un punto P x, y, z appartiene alla retta AB solo se i vettori AP e AB sono collineari cioè AP = λ AB e quindi x x A, y y A, z z A = λ(x B x A, y B y A z B z A ) x x A x B x A = y y A y B y A = z z A z B z A
 x x A x B x A = y y A y B y A = z z A z B z")
17 Piano passante per tre punti Dati tre punti non allineati A(x A, y A, z A ) B x B, y B, z B C x C, y C, z C determina l equazione (cartesiana) del piano da essi individuato Un punto P x, y, z appartiene al piano se e solo se i vettori AP, AB, AC sono linearmente dipendenti, se e solo se x x A y y A z z A x B x A y B y A z B z A = 0 x C x A y C y A z C z A

18 Alcune tipologie di problemi semplici Determinare l equazione della retta passante per un punto assegnato e perpendicolare ad un piano dato Determinare l equazione del piano parallelo o perpendicolare ad un piano dato e passante per un punto assegnato Determinare l equazione di una retta passante per un punto assegnato e parallela o perpendicolare ad una retta data Determinare l equazione del piano contenente una retta data e passante per un punto assegnato

19 e più difficili Dati una retta r (equazione parametrica) ed un punto Q x Q, y Q, z Q determinare la proiezione ortogonale Q di Q su r

20 Proiezione ortogonale di un punto su una retta Supposta la retta r scritta nella forma OP = OP 0 + λ v r: x = x 0 + λv 1 y = y 0 + λv 2 z = z 0 + λv 3 dovrà essere Q Q v quindi Q Q v = 0 e P 0 Q = λ v per qualche λ. Da P 0 Q = P 0 Q + Q Q si ottiene Q Q = P 0 Q P 0 Q = P 0 Q λ v quindi v Q Q = v (P 0 Q λ v) = v P 0 Q λ v 2 = 0 da cui λ = v P oq v 2 e OQ = OP 0 + v P oq v 2 v, vale a dire x Q y Q z Q = x 0 y 0 + v 1, v 2, v 3 (x Q x 0, y Q y 0 z Q z 0 ) z 0 v v v 3 v 1 v 2 v 3
 z 0 v")
21 Un po di materiale web.ticino.com/lucarovelli/appunti/3n_cap1_geom_vettoriale.pd Allegati/quadernididattici/favro.pdf Allegati/quadernididattici/favro.pdf
CORSO DI LAUREA IN INGEGNERIA.
 CORSO DI LAUREA IN INGEGNERIA. FOGLIO DI ESERCIZI 4 GEOMETRIA E ALGEBRA LINEARE 2010/11 Esercizio 4.1 (2.2). Determinare l equazione parametrica e Cartesiana della retta dello spazio (a) Passante per i
CORSO DI LAUREA IN INGEGNERIA. FOGLIO DI ESERCIZI 4 GEOMETRIA E ALGEBRA LINEARE 2010/11 Esercizio 4.1 (2.2). Determinare l equazione parametrica e Cartesiana della retta dello spazio (a) Passante per i
Esame di Geometria - 9 CFU (Appello del 28 gennaio 2013 - A)
") Esame di Geometria - 9 CFU (Appello del 28 gennaio 23 - A) Cognome: Nome: Nr.matricola: Corso di laurea: Esercizio. Nello spazio R 3, siano dati il piano e i punti P = (, 2, ), Q = (2,, ). π : x + 2y 3
Esame di Geometria - 9 CFU (Appello del 28 gennaio 23 - A) Cognome: Nome: Nr.matricola: Corso di laurea: Esercizio. Nello spazio R 3, siano dati il piano e i punti P = (, 2, ), Q = (2,, ). π : x + 2y 3
RETTE, PIANI, SFERE, CIRCONFERENZE
 RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
Prova scritta di Geometria 2 Prof. M. Boratynski
 10/9/2008 Es. 1: Si consideri la forma bilineare simmetrica b su R 3 associata, rispetto alla base canonica {e 1, e 2, e 3 } alla matrice 3 2 1 A = 2 3 0. 1 0 1 1) Provare che (R 3, b) è uno spazio vettoriale
10/9/2008 Es. 1: Si consideri la forma bilineare simmetrica b su R 3 associata, rispetto alla base canonica {e 1, e 2, e 3 } alla matrice 3 2 1 A = 2 3 0. 1 0 1 1) Provare che (R 3, b) è uno spazio vettoriale
15 febbraio 2010 - Soluzione esame di geometria - 12 crediti Ingegneria gestionale - a.a. 2009-2010 COGNOME... NOME... N. MATRICOLA...
 15 febbraio 010 - Soluzione esame di geometria - 1 crediti Ingegneria gestionale - a.a. 009-010 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura
15 febbraio 010 - Soluzione esame di geometria - 1 crediti Ingegneria gestionale - a.a. 009-010 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura
Richiami di algebra lineare e geometria di R n
 Richiami di algebra lineare e geometria di R n combinazione lineare, conica e convessa spazi lineari insiemi convessi, funzioni convesse rif. BT.5 Combinazione lineare, conica, affine, convessa Un vettore
Richiami di algebra lineare e geometria di R n combinazione lineare, conica e convessa spazi lineari insiemi convessi, funzioni convesse rif. BT.5 Combinazione lineare, conica, affine, convessa Un vettore
Rette e piani con le matrici e i determinanti
 CAPITOLO Rette e piani con le matrici e i determinanti Esercizio.. Stabilire se i punti A(, ), B(, ) e C(, ) sono allineati. Esercizio.. Stabilire se i punti A(,,), B(,,), C(,, ) e D(4,,0) sono complanari.
CAPITOLO Rette e piani con le matrici e i determinanti Esercizio.. Stabilire se i punti A(, ), B(, ) e C(, ) sono allineati. Esercizio.. Stabilire se i punti A(,,), B(,,), C(,, ) e D(4,,0) sono complanari.
ELEMENTI DI GEOMETRIA ANALITICA: LA RETTA.
 ELEMENTI DI GEOMETRIA ANALITICA: LA RETTA. Prerequisiti I radicali Risoluzione di sistemi di equazioni di primo e secondo grado. Classificazione e dominio delle funzioni algebriche Obiettivi minimi Saper
ELEMENTI DI GEOMETRIA ANALITICA: LA RETTA. Prerequisiti I radicali Risoluzione di sistemi di equazioni di primo e secondo grado. Classificazione e dominio delle funzioni algebriche Obiettivi minimi Saper
GEOMETRIA I Corso di Geometria I (seconda parte)
") Corso di Geometria I (seconda parte) anno acc. 2009/2010 Cambiamento del sistema di riferimento in E 3 Consideriamo in E 3 due sistemi di riferimento ortonormali R e R, ed un punto P (x, y, z) in R. Lo
Corso di Geometria I (seconda parte) anno acc. 2009/2010 Cambiamento del sistema di riferimento in E 3 Consideriamo in E 3 due sistemi di riferimento ortonormali R e R, ed un punto P (x, y, z) in R. Lo
Processo di rendering
 Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
f(x, y, z) = (x + ky + z, x y + 2z, x + y z) f(x, y, z) = (x + 2y z, x + y z, x + 2y) F (f(x)) = (f(0), f(1), f(2))
 = (x + ky + z, x y + 2z, x + y z) f(x, y, z) = (x + 2y z, x + y z, x + 2y) F (f(x)) = (f(0), f(1), f(2))") Algebra Lineare e Geometria Analitica Politecnico di Milano Ingegneria Applicazioni Lineari 1. Sia f : R 3 R 3 l applicazione lineare definita da f(x, y, z) = (x + ky + z, x y + 2z, x + y z) per ogni (x,
Algebra Lineare e Geometria Analitica Politecnico di Milano Ingegneria Applicazioni Lineari 1. Sia f : R 3 R 3 l applicazione lineare definita da f(x, y, z) = (x + ky + z, x y + 2z, x + y z) per ogni (x,
Diagonalizzazione di matrici e applicazioni lineari
 CAPITOLO 9 Diagonalizzazione di matrici e applicazioni lineari Esercizio 9.1. Verificare che v = (1, 0, 0, 1) è autovettore dell applicazione lineare T così definita T(x 1,x 2,x 3,x 4 ) = (2x 1 2x 3, x
CAPITOLO 9 Diagonalizzazione di matrici e applicazioni lineari Esercizio 9.1. Verificare che v = (1, 0, 0, 1) è autovettore dell applicazione lineare T così definita T(x 1,x 2,x 3,x 4 ) = (2x 1 2x 3, x
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica Terzo Appello del corso di Geometria e Algebra II Parte - Docente F. Flamini, Roma, 7/09/2007 SVOLGIMENTO COMPITO III APPELLO
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica Terzo Appello del corso di Geometria e Algebra II Parte - Docente F. Flamini, Roma, 7/09/2007 SVOLGIMENTO COMPITO III APPELLO
Esercizio 2 Si consideri la funzione f definita dalle seguenti condizioni: e x. per x 1 f(x) = α x + e 1 per 1 < x
 = α x + e 1 per 1 < x") FUNZIONI Esercizio 1 Studiare la funzione f(x) = ln ( ) x e disegnarne il grafico. x 1 Esercizio 2 Si consideri la funzione f definita dalle seguenti condizioni: { e x per x 1 f(x) = α x + e 1 per 1
FUNZIONI Esercizio 1 Studiare la funzione f(x) = ln ( ) x e disegnarne il grafico. x 1 Esercizio 2 Si consideri la funzione f definita dalle seguenti condizioni: { e x per x 1 f(x) = α x + e 1 per 1
Algebra Lineare e Geometria
 Algebra Lineare e Geometria Corso di Laurea in Ingegneria Elettronica A.A. 2013-2014 Prova d esame del 16/06/2014. 1) a) Determinare la matrice associata all applicazione lineare T : R 3 R 4 definita da
Algebra Lineare e Geometria Corso di Laurea in Ingegneria Elettronica A.A. 2013-2014 Prova d esame del 16/06/2014. 1) a) Determinare la matrice associata all applicazione lineare T : R 3 R 4 definita da
Politecnico di Torino Facoltà di Architettura. Raccolta di esercizi proposti nelle prove scritte
 Politecnico di Torino Facoltà di Architettura Raccolta di esercizi proposti nelle prove scritte relativi a: algebra lineare, vettori e geometria analitica Esercizio. Determinare, al variare del parametro
Politecnico di Torino Facoltà di Architettura Raccolta di esercizi proposti nelle prove scritte relativi a: algebra lineare, vettori e geometria analitica Esercizio. Determinare, al variare del parametro
Esercizi di Algebra Lineare. Claretta Carrara
 Esercizi di Algebra Lineare Claretta Carrara Indice Capitolo 1. Operazioni tra matrici e n-uple 1 1. Soluzioni 3 Capitolo. Rette e piani 15 1. Suggerimenti 19. Soluzioni 1 Capitolo 3. Gruppi, spazi e
Esercizi di Algebra Lineare Claretta Carrara Indice Capitolo 1. Operazioni tra matrici e n-uple 1 1. Soluzioni 3 Capitolo. Rette e piani 15 1. Suggerimenti 19. Soluzioni 1 Capitolo 3. Gruppi, spazi e
CONI, CILINDRI, SUPERFICI DI ROTAZIONE
 CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Liceo G.B. Vico Corsico
 Liceo G.B. Vico Corsico Classe: 3A Materia: MATEMATICA Insegnante: Nicola Moriello Testo utilizzato: Bergamini Trifone Barozzi: Manuale blu.0 di Matematica Moduli S, L, O, Q, Beta ed. Zanichelli 1) Programma
Liceo G.B. Vico Corsico Classe: 3A Materia: MATEMATICA Insegnante: Nicola Moriello Testo utilizzato: Bergamini Trifone Barozzi: Manuale blu.0 di Matematica Moduli S, L, O, Q, Beta ed. Zanichelli 1) Programma
(V) (FX) Z 6 è un campo rispetto alle usuali operazioni di somma e prodotto.
 (FX) Z 6 è un campo rispetto alle usuali operazioni di somma e prodotto.") 29 giugno 2009 - PROVA D ESAME - Geometria e Algebra T NOME: MATRICOLA: a=, b=, c= Sostituire ai parametri a, b, c rispettivamente la terzultima, penultima e ultima cifra del proprio numero di matricola
29 giugno 2009 - PROVA D ESAME - Geometria e Algebra T NOME: MATRICOLA: a=, b=, c= Sostituire ai parametri a, b, c rispettivamente la terzultima, penultima e ultima cifra del proprio numero di matricola
INTRODUZIONE ALLA GEOMETRIA ANALITICA LA RETTA E LA PARABOLA
 INTRODUZIONE ALLA GEOMETRIA ANALITICA LA RETTA E LA PARABOLA Una Geometria non può essere più vera di un altra; può essere solamente più comoda. Ora la Geometria Euclidea è e resterà più comoda H. Poincaré
INTRODUZIONE ALLA GEOMETRIA ANALITICA LA RETTA E LA PARABOLA Una Geometria non può essere più vera di un altra; può essere solamente più comoda. Ora la Geometria Euclidea è e resterà più comoda H. Poincaré
Lezioni di Algebra Lineare III. Applicazioni lineari e matrici Struttura algebrica delle soluzioni dei sistemi lineari
 Versione ottobre novembre 2008 Lezioni di Algebra Lineare III. Applicazioni lineari e matrici Struttura algebrica delle soluzioni dei sistemi lineari Contenuto 1. Applicazioni lineari 2. L insieme delle
Versione ottobre novembre 2008 Lezioni di Algebra Lineare III. Applicazioni lineari e matrici Struttura algebrica delle soluzioni dei sistemi lineari Contenuto 1. Applicazioni lineari 2. L insieme delle
4. Proiezioni del piano e dello spazio
 4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
2.1 Definizione di applicazione lineare. Siano V e W due spazi vettoriali su R. Un applicazione
 Capitolo 2 MATRICI Fra tutte le applicazioni su uno spazio vettoriale interessa esaminare quelle che mantengono la struttura di spazio vettoriale e che, per questo, vengono dette lineari La loro importanza
Capitolo 2 MATRICI Fra tutte le applicazioni su uno spazio vettoriale interessa esaminare quelle che mantengono la struttura di spazio vettoriale e che, per questo, vengono dette lineari La loro importanza
Laboratorio di Rappresentazione e Modellazione dell Architettura
 Laboratorio di Rappresentazione e Modellazione dell Architettura Seconda Università di Napoli Facoltà di Architettura Corso di Laurea in Architettura Laboratorio di Rappresentazione e Modellazione dell
Laboratorio di Rappresentazione e Modellazione dell Architettura Seconda Università di Napoli Facoltà di Architettura Corso di Laurea in Architettura Laboratorio di Rappresentazione e Modellazione dell
CORSO DI LAUREA INF TWM ANNO DI IMMATRICOLAZIONE MATRICOLA
 COGNOME NOME CORSO DI LAUREA INF TWM ANNO DI IMMATRICOLAZIONE MATRICOLA SIMULAZIONE SCRITTO DI MATEMATICA DISCRETA, SECONDA PARTE Per ottenere la sufficienza bisogna rispondere in modo corretto ad almeno
COGNOME NOME CORSO DI LAUREA INF TWM ANNO DI IMMATRICOLAZIONE MATRICOLA SIMULAZIONE SCRITTO DI MATEMATICA DISCRETA, SECONDA PARTE Per ottenere la sufficienza bisogna rispondere in modo corretto ad almeno
Proiezioni Grafica 3d
 Proiezioni Grafica 3d Giancarlo RINALDO rinaldo@dipmat.unime.it Dipartimento di Matematica Università di Messina ProiezioniGrafica 3d p. 1 Introduzione Il processo di visualizzazione in 3D è intrinsecamente
Proiezioni Grafica 3d Giancarlo RINALDO rinaldo@dipmat.unime.it Dipartimento di Matematica Università di Messina ProiezioniGrafica 3d p. 1 Introduzione Il processo di visualizzazione in 3D è intrinsecamente
Applicazioni lineari
 Applicazioni lineari Esempi di applicazioni lineari Definizione. Se V e W sono spazi vettoriali, una applicazione lineare è una funzione f: V W tale che, per ogni v, w V e per ogni a, b R si abbia f(av
Applicazioni lineari Esempi di applicazioni lineari Definizione. Se V e W sono spazi vettoriali, una applicazione lineare è una funzione f: V W tale che, per ogni v, w V e per ogni a, b R si abbia f(av
2) Sul piano coordinato z = 0 studiare il fascio Φ di coniche di equazione. determinando in particolare le sue coniche spezzate ed i suoi punti base.
 Sul piano coordinato z = 0 studiare il fascio Φ di coniche di equazione. determinando in particolare le sue coniche spezzate ed i suoi punti base.") DPARTMENTO D MATEMATCA E NFORMATCA Corso di Laurea in ngegneria Telematica Prova scritta di Elementi di Algebra e Geometria assegnata il 18/7/02 È assegnato l endomorfismo f : R 3 R 3 definito dalle relazioni
DPARTMENTO D MATEMATCA E NFORMATCA Corso di Laurea in ngegneria Telematica Prova scritta di Elementi di Algebra e Geometria assegnata il 18/7/02 È assegnato l endomorfismo f : R 3 R 3 definito dalle relazioni
x 1 + x 2 3x 4 = 0 x1 + x 2 + x 3 = 0 x 1 + x 2 3x 4 = 0.
 Problema. Sia W il sottospazio dello spazio vettoriale R 4 dato da tutte le soluzioni dell equazione x + x 2 + x = 0. (a. Sia U R 4 il sottospazio dato da tutte le soluzioni dell equazione Si determini
Problema. Sia W il sottospazio dello spazio vettoriale R 4 dato da tutte le soluzioni dell equazione x + x 2 + x = 0. (a. Sia U R 4 il sottospazio dato da tutte le soluzioni dell equazione Si determini
Fig. 2. Proiezioni ortogonali di un parallelepipedo su piani esterni alla figura
 3. LE PROIEZIONI ORTOGONALI Le proiezioni ortogonali sono originate dallo scopo di proiettare su un piano (il foglio della rappresentazione) un oggetto posto nello spazio, che conservi le stesse caratteristiche
3. LE PROIEZIONI ORTOGONALI Le proiezioni ortogonali sono originate dallo scopo di proiettare su un piano (il foglio della rappresentazione) un oggetto posto nello spazio, che conservi le stesse caratteristiche
Matteo Moda Geometria e algebra lineare Fasci. Fasci. N.B.: Questo argomento si trova sull eserciziario. Fasci di rette nel piano
 Fasci N.B.: Questo argomento si trova sull eserciziario Fasci di rette nel piano 1 Fasci di piani nello spazio 2 Matteo Moda Geometria e algebra lineare Fasci Date due rette r ed r di equazione: : 0 :
Fasci N.B.: Questo argomento si trova sull eserciziario Fasci di rette nel piano 1 Fasci di piani nello spazio 2 Matteo Moda Geometria e algebra lineare Fasci Date due rette r ed r di equazione: : 0 :
Le trasformazioni geometriche
 Le trasformazioni geometriche Le trasformazioni geometriche Le trasformazioni affini del piano o affinità Le similitudini Le isometrie Le traslazioni Le rotazioni Le simmetrie assiale e centrale Le omotetie
Le trasformazioni geometriche Le trasformazioni geometriche Le trasformazioni affini del piano o affinità Le similitudini Le isometrie Le traslazioni Le rotazioni Le simmetrie assiale e centrale Le omotetie
Spazi lineari - PARTE II - Felice Iavernaro. Dipartimento di Matematica Università di Bari. 9 e 16 Marzo 2007
 Spazi lineari - PARTE II - Felice Iavernaro Dipartimento di Matematica Università di Bari 9 e 16 Marzo 2007 Felice Iavernaro (Univ. Bari) Spazi lineari 9-16/03/2007 1 / 17 Condizionamento dei sistemi lineari
Spazi lineari - PARTE II - Felice Iavernaro Dipartimento di Matematica Università di Bari 9 e 16 Marzo 2007 Felice Iavernaro (Univ. Bari) Spazi lineari 9-16/03/2007 1 / 17 Condizionamento dei sistemi lineari
Federico Lastaria. Analisi e Geometria 2. Matrici simmetriche. Il teorema spettrale. 1/24
 Contenuto Endomorfismi auto-aggiunti. Matrici simmetriche. Il teorema spettrale Gli autovalori di una matrice simmetrica sono tutti reali. (Dimostrazione fatta usando i numeri complessi). Dimostrazione
Contenuto Endomorfismi auto-aggiunti. Matrici simmetriche. Il teorema spettrale Gli autovalori di una matrice simmetrica sono tutti reali. (Dimostrazione fatta usando i numeri complessi). Dimostrazione
PROGRAMMA di MATEMATICA APPLICATA. Prof. ONORATI Mariano
 ESAMI DI STATO SESSIONE ORDINARIA 2014/2015 CLASSE V SEZIONE E PROGRAMMA di MATEMATICA APPLICATA Prof. ONORATI Mariano Libro/i di testo in adozione: Matematica.rosso vol.5 Autori: Bergamini Trifone - Barozzi
ESAMI DI STATO SESSIONE ORDINARIA 2014/2015 CLASSE V SEZIONE E PROGRAMMA di MATEMATICA APPLICATA Prof. ONORATI Mariano Libro/i di testo in adozione: Matematica.rosso vol.5 Autori: Bergamini Trifone - Barozzi
LE FUNZIONI MATEMATICHE
 ALGEBRA LE FUNZIONI MATEMATICHE E IL PIANO CARTESIANO PREREQUISITI l l l l l conoscere il concetto di insieme conoscere il concetto di relazione disporre i dati in una tabella rappresentare i dati mediante
ALGEBRA LE FUNZIONI MATEMATICHE E IL PIANO CARTESIANO PREREQUISITI l l l l l conoscere il concetto di insieme conoscere il concetto di relazione disporre i dati in una tabella rappresentare i dati mediante
La spirale iperbolica: Fu descritta per la prima volta da Pierre Varignon (1654-1722). L equazione, espressa in coordinate polari, è del tipo:
. L equazione, espressa in coordinate polari, è del tipo:") Esistono delle forme geometriche che sono in grado, per complessi fattori psicologici non del tutto chiariti, di comunicarci un senso d equilibrio, di gradimento e di benessere. Tra queste analizzeremo
Esistono delle forme geometriche che sono in grado, per complessi fattori psicologici non del tutto chiariti, di comunicarci un senso d equilibrio, di gradimento e di benessere. Tra queste analizzeremo
Trasformazioni Geometriche 1 Roberto Petroni, 2011
 1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
ESERCIZI DI ALGEBRA LINEARE E GEOMETRIA
 ESERCIZI DI ALGEBRA LINEARE E GEOMETRIA Francesco Bottacin Padova, 24 febbraio 2012 Capitolo 1 Algebra Lineare 1.1 Spazi e sottospazi vettoriali Esercizio 1.1. Sia U il sottospazio di R 4 generato dai
ESERCIZI DI ALGEBRA LINEARE E GEOMETRIA Francesco Bottacin Padova, 24 febbraio 2012 Capitolo 1 Algebra Lineare 1.1 Spazi e sottospazi vettoriali Esercizio 1.1. Sia U il sottospazio di R 4 generato dai
MOMENTI DI INERZIA. m i. i=1
 MOMENTI DI INEZIA Massa Ad ogni punto materiale si associa uno scalare positivo m che rappresenta la quantità di materia di cui è costituito il punto. m, la massa, è costante nel tempo. Dato un sistema
MOMENTI DI INEZIA Massa Ad ogni punto materiale si associa uno scalare positivo m che rappresenta la quantità di materia di cui è costituito il punto. m, la massa, è costante nel tempo. Dato un sistema
MATEMATICA. { 2 x =12 y 3 y +8 x =0, si pone il problema di trovare, se esistono, un numero x ed un numero y che risolvano entrambe le equazioni.
 MATEMATICA. Sistemi lineari in due equazioni due incognite. Date due equazioni lineari nelle due incognite x, y come ad esempio { 2 x =12 y 3 y +8 x =0, si pone il problema di trovare, se esistono, un
MATEMATICA. Sistemi lineari in due equazioni due incognite. Date due equazioni lineari nelle due incognite x, y come ad esempio { 2 x =12 y 3 y +8 x =0, si pone il problema di trovare, se esistono, un
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
+ t v. v 3. x = p + tv, t R. + t. 3 2 e passante per il punto p =
 5. Rette e piani in R 3 ; sfere. In questo paragrafo studiamo le rette, i piani e le sfere in R 3. Ci sono due modi per desrivere piani e rette in R 3 : mediante equazioni artesiane oppure mediante equazioni
5. Rette e piani in R 3 ; sfere. In questo paragrafo studiamo le rette, i piani e le sfere in R 3. Ci sono due modi per desrivere piani e rette in R 3 : mediante equazioni artesiane oppure mediante equazioni
Corso di Visione Artificiale. Stereopsi. Samuel Rota Bulò
 Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Geometria analitica di base (prima parte)
") SAPERE Al termine di questo capitolo, avrai appreso: come fissare un sistema di riferimento cartesiano ortogonale il significato di equazione di una retta il significato di coefficiente angolare di una
SAPERE Al termine di questo capitolo, avrai appreso: come fissare un sistema di riferimento cartesiano ortogonale il significato di equazione di una retta il significato di coefficiente angolare di una
Grazie ai Colleghi di Geometria del Dipartimento di Matematica dell Università degli Studi di Torino per il loro prezioso contributo. Grazie al Prof.
 A01 178 Grazie ai Colleghi di Geometria del Dipartimento di Matematica dell Università degli Studi di Torino per il loro prezioso contributo. Grazie al Prof. S.M. Salamon per tanti utili suggerimenti e
A01 178 Grazie ai Colleghi di Geometria del Dipartimento di Matematica dell Università degli Studi di Torino per il loro prezioso contributo. Grazie al Prof. S.M. Salamon per tanti utili suggerimenti e
Sia data la rete di fig. 1 costituita da tre resistori,,, e da due generatori indipendenti ideali di corrente ed. Fig. 1
 Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
Analisi delle reti 1. Analisi nodale (metodo dei potenziali dei nodi) 1.1 Analisi nodale in assenza di generatori di tensione L'analisi nodale, detta altresì metodo dei potenziali ai nodi, è un procedimento
Esercizi di Geometria e Algebra Lineare
 Esercizi di Geometria e Algebra Lineare 1) Dati i vettori a = (2, 4), b = (1, 2), c = ( 1, 1), d = (3, 6), stabilire se c e d appartengono a Span(a, b}) 2) Nello spazio vettoriale R 3 sul campo R, sia
Esercizi di Geometria e Algebra Lineare 1) Dati i vettori a = (2, 4), b = (1, 2), c = ( 1, 1), d = (3, 6), stabilire se c e d appartengono a Span(a, b}) 2) Nello spazio vettoriale R 3 sul campo R, sia
PERCORSO DIDATTICO SULLE SUCCESSIONI NUMERICHE
 PERCORSO DIDATTICO SULLE SUCCESSIONI NUMERICHE Nuclei Fondanti: Relazioni e Funzioni, Geometria Tipo di scuola e classe: Liceo Scientifico, classe II Riferimenti alle Indicazioni Nazionali: OBIETTIVI SPECIFICI
PERCORSO DIDATTICO SULLE SUCCESSIONI NUMERICHE Nuclei Fondanti: Relazioni e Funzioni, Geometria Tipo di scuola e classe: Liceo Scientifico, classe II Riferimenti alle Indicazioni Nazionali: OBIETTIVI SPECIFICI
1 Regole generali per l esame. 2 Libro di Testo
 FACOLTÀ DI INGEGNERIA Corso di GEOMETRIA E ALGEBRA (mn). (Ing. per l Ambiente e il Territorio, Ing. Informatica - Sede di Mantova) A.A. 2008/2009. Docente: F. BISI. 1 Regole generali per l esame L esame
FACOLTÀ DI INGEGNERIA Corso di GEOMETRIA E ALGEBRA (mn). (Ing. per l Ambiente e il Territorio, Ing. Informatica - Sede di Mantova) A.A. 2008/2009. Docente: F. BISI. 1 Regole generali per l esame L esame
Lezione del 28-11-2006. Teoria dei vettori ordinari
 Lezione del 8--006 Teoria dei vettori ordinari. Esercizio Sia B = {i, j, k} una base ortonormale fissata. ) Determinare le coordinate dei vettori v V 3 complanari a v =,, 0) e v =, 0, ), aventi lunghezza
Lezione del 8--006 Teoria dei vettori ordinari. Esercizio Sia B = {i, j, k} una base ortonormale fissata. ) Determinare le coordinate dei vettori v V 3 complanari a v =,, 0) e v =, 0, ), aventi lunghezza
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Applicazioni lineari
 CAPITOLO 8 Applicazioni lineari Esercizio 8.. Sia T : R 3 R 3 l applicazione definita da T(x,x,x 3 ) = (x,x,x 3 ). Stabilire se T è lineare. Esercizio 8.. Verificare che la funzione determinante definita
CAPITOLO 8 Applicazioni lineari Esercizio 8.. Sia T : R 3 R 3 l applicazione definita da T(x,x,x 3 ) = (x,x,x 3 ). Stabilire se T è lineare. Esercizio 8.. Verificare che la funzione determinante definita
LICEO SCIENTIFICO opzione delle scienze applicate MATEMATICA
 LICEO SCIENTIFICO opzione delle scienze applicate MATEMATICA PROFILO GENERALE E COMPETENZE Al termine del percorso liceale lo studente dovrà padroneggiare i principali concetti e metodi di base della matematica,
LICEO SCIENTIFICO opzione delle scienze applicate MATEMATICA PROFILO GENERALE E COMPETENZE Al termine del percorso liceale lo studente dovrà padroneggiare i principali concetti e metodi di base della matematica,
Capitolo 3. Il metodo visto nella geometria dello spazio duale. 3.1 Definizione di spazio duale
 Il metodo visto nella geometria dello spazio duale Nel precedente capitolo e stato esposto in linea generale il metodo a luce debolmente strutturata enfatizzando soprattutto la localizzazione temporale
Il metodo visto nella geometria dello spazio duale Nel precedente capitolo e stato esposto in linea generale il metodo a luce debolmente strutturata enfatizzando soprattutto la localizzazione temporale
I numeri complessi. Mario Spagnuolo Corso di Laurea in Fisica - Facoltà di Scienze - Università Federico II di Napoli
 I numeri complessi Mario Spagnuolo Corso di Laurea in Fisica - Facoltà di Scienze - Università Federico II di Napoli 1 Introduzione Studiare i numeri complessi può sembrare inutile ed avulso dalla realtà;
I numeri complessi Mario Spagnuolo Corso di Laurea in Fisica - Facoltà di Scienze - Università Federico II di Napoli 1 Introduzione Studiare i numeri complessi può sembrare inutile ed avulso dalla realtà;
FASCI DI RETTE. scrivere la retta in forma esplicita: 2y = 3x + 4 y = 3 2 x 2. scrivere l equazione del fascio di rette:
 FASCI DI RETTE DEFINIZIONE: Si chiama fascio di rette parallele o fascio improprio [erroneamente data la somiglianza effettiva con un fascio!] un insieme di rette che hanno tutte lo stesso coefficiente
FASCI DI RETTE DEFINIZIONE: Si chiama fascio di rette parallele o fascio improprio [erroneamente data la somiglianza effettiva con un fascio!] un insieme di rette che hanno tutte lo stesso coefficiente
Misura e integrazione Formulario
 Misura e integrazione Formulario Integrale su rettangolo 1. 2. Teorema di riduzione per un rettangolo (Fubini) Per passare dal rettangolo ad un qualsiasi dominio si definisce una nuova funzione. Integrale
Misura e integrazione Formulario Integrale su rettangolo 1. 2. Teorema di riduzione per un rettangolo (Fubini) Per passare dal rettangolo ad un qualsiasi dominio si definisce una nuova funzione. Integrale
QUAL È LA DISTANZA TRA ROMA E NEW YORK? UN PO' DI GEOMETRIA ANALITICA SULLA SFERA
 QUAL È LA DISTANZA TRA ROMA E NEW YORK? UN PO' DI GEOMETRIA ANALITICA SULLA SFERA Michele Impedovo Bollettino dei Docenti di Matematica del Canton Ticino (CH) n 36, maggio 98. Il problema Il lavoro che
QUAL È LA DISTANZA TRA ROMA E NEW YORK? UN PO' DI GEOMETRIA ANALITICA SULLA SFERA Michele Impedovo Bollettino dei Docenti di Matematica del Canton Ticino (CH) n 36, maggio 98. Il problema Il lavoro che
LEZIONE 23. Esempio 23.1.3. Si consideri la matrice (si veda l Esempio 22.2.5) A = 1 2 2 3 3 0
 A = 1 2 2 3 3 0") LEZIONE 23 231 Diagonalizzazione di matrici Abbiamo visto nella precedente lezione che, in generale, non è immediato che, data una matrice A k n,n con k = R, C, esista sempre una base costituita da suoi
LEZIONE 23 231 Diagonalizzazione di matrici Abbiamo visto nella precedente lezione che, in generale, non è immediato che, data una matrice A k n,n con k = R, C, esista sempre una base costituita da suoi
(c) Determinare per quali valori di k lo spazio delle soluzioni ha dimensione 2:
 Determinare per quali valori di k lo spazio delle soluzioni ha dimensione 2:") CORSO DI GEOMETRIA E ALGEBRA Cognome e Nome: Corso di Laurea: 7 luglio 2017 Matricola: Anno di corso: x y 1. (8 pt Si consideri il sistema lineare AX = B, dove X = z è il vettore delle t incognite, A e
CORSO DI GEOMETRIA E ALGEBRA Cognome e Nome: Corso di Laurea: 7 luglio 2017 Matricola: Anno di corso: x y 1. (8 pt Si consideri il sistema lineare AX = B, dove X = z è il vettore delle t incognite, A e
Siano V e W due spazi vettoriali. La definizione seguente é è tra quelle basilari per il corso di Matematica B. L : V W
 Matematica B - a.a 2006/07 p. 1 Siano V e W due spazi vettoriali. La definizione seguente é è tra quelle basilari per il corso di Matematica B. Definizione 1. La funzione L : V W si dice una applicazione
Matematica B - a.a 2006/07 p. 1 Siano V e W due spazi vettoriali. La definizione seguente é è tra quelle basilari per il corso di Matematica B. Definizione 1. La funzione L : V W si dice una applicazione
PROGRAMMAZIONE DIDATTICA RIFERITA ALLA DISCIPLINA :MATEMATICA
 Istituto Istruzione Superiore A. Venturi Modena Liceo artistico - Istituto Professionale Grafica Via Rainusso, 66-41124 MODENA Sede di riferimento (Via de Servi, 21-41121 MODENA) tel. 059-222156 / 245330
Istituto Istruzione Superiore A. Venturi Modena Liceo artistico - Istituto Professionale Grafica Via Rainusso, 66-41124 MODENA Sede di riferimento (Via de Servi, 21-41121 MODENA) tel. 059-222156 / 245330
Esercizi di Geometria e Algebra Lineare C.d.L. Ingegneria Meccanica
 Esercizi di Geometria e Algebra Lineare C.d.L. Ingegneria Meccanica 1) Dati i vettori a = (2, 4), b = (1, 2), c = ( 1, 1), d = (3, 6), stabilire se c e d appartengono a Span(a, b}). 2) Nello spazio vettoriale
Esercizi di Geometria e Algebra Lineare C.d.L. Ingegneria Meccanica 1) Dati i vettori a = (2, 4), b = (1, 2), c = ( 1, 1), d = (3, 6), stabilire se c e d appartengono a Span(a, b}). 2) Nello spazio vettoriale
1 Equazioni parametriche e cartesiane di sottospazi affini di R n
 2 Trapani Dispensa di Geometria, Equazioni parametriche e cartesiane di sottospazi affini di R n Un sottospazio affine Σ di R n e il traslato di un sottospazio vettoriale. Cioe esiste un sottospazio vettoriale
2 Trapani Dispensa di Geometria, Equazioni parametriche e cartesiane di sottospazi affini di R n Un sottospazio affine Σ di R n e il traslato di un sottospazio vettoriale. Cioe esiste un sottospazio vettoriale
1 Applicazioni Lineari tra Spazi Vettoriali
 1 Applicazioni Lineari tra Spazi Vettoriali Definizione 1 (Applicazioni lineari) Si chiama applicazione lineare una applicazione tra uno spazio vettoriale ed uno spazio vettoriale sul campo tale che "!$%!
1 Applicazioni Lineari tra Spazi Vettoriali Definizione 1 (Applicazioni lineari) Si chiama applicazione lineare una applicazione tra uno spazio vettoriale ed uno spazio vettoriale sul campo tale che "!$%!
CORSO DI LAUREA IN INGEGNERIA DELLE TELECOMUNICAZIONI
 CORSO DI LAUREA IN INGEGNERIA DELLE TELECOMUNICAZIONI FOGLIO DI ESERCIZI # 4 GEOMETRIA E ALGEBRA LINEARE 009/0 Esercizio 4. (Esercizio 7.3). Calcolare l inversa delle matrici (invertibili) [ ] 3 A = B
CORSO DI LAUREA IN INGEGNERIA DELLE TELECOMUNICAZIONI FOGLIO DI ESERCIZI # 4 GEOMETRIA E ALGEBRA LINEARE 009/0 Esercizio 4. (Esercizio 7.3). Calcolare l inversa delle matrici (invertibili) [ ] 3 A = B
LICEO SCIENTIFICO opzione delle scienze applicate MATEMATICA LICEO SCIENTIFICO MATEMATICA
 LICEO SCIENTIFICO MATEMATICA PROFILO GENERALE E COMPETENZE Al termine del percorso liceale lo studente dovrà padroneggiare i principali concetti e metodi di base della matematica, sia aventi valore intrinseco
LICEO SCIENTIFICO MATEMATICA PROFILO GENERALE E COMPETENZE Al termine del percorso liceale lo studente dovrà padroneggiare i principali concetti e metodi di base della matematica, sia aventi valore intrinseco
Liceo Scientifico Statale. Leonardo da Vinci. Fisica. Programma svolto durante l anno scolastico 2012/13 CLASSE I B. DOCENTE Elda Chirico
 Liceo Scientifico Statale Leonardo da Vinci Fisica Programma svolto durante l anno scolastico 2012/13 CLASSE I B DOCENTE Elda Chirico Le Grandezze. Introduzione alla fisica. Metodo sperimentale. Grandezze
Liceo Scientifico Statale Leonardo da Vinci Fisica Programma svolto durante l anno scolastico 2012/13 CLASSE I B DOCENTE Elda Chirico Le Grandezze. Introduzione alla fisica. Metodo sperimentale. Grandezze
Formulario. Coordinate del punto medio M di un segmento di estremi A(x 1, y 1 ) e B(x 2, y 2 ): x1 + x y 2
 e B(x 2, y 2 ): x1 + x y 2") Formulario Componenti di un vettore di estremi A(x 1, y 1 e B(x 2, y 2 B A = AB = (x2 x 1 i + (y 2 y 1 j Distanza tra due punti A(x 1, y 1 e B(x 2, y 2 : AB = (x 2 x 1 2 + (y 2 y 1 2 Coordinate del punto
Formulario Componenti di un vettore di estremi A(x 1, y 1 e B(x 2, y 2 B A = AB = (x2 x 1 i + (y 2 y 1 j Distanza tra due punti A(x 1, y 1 e B(x 2, y 2 : AB = (x 2 x 1 2 + (y 2 y 1 2 Coordinate del punto
Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 2011/2012
 Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 211/212 Ricordare: una funzione lipschitziana tra spazi metrici manda insiemi limitati in insiemi limitati; se il dominio di una funzione
Analisi Matematica 2 per Matematica Esempi di compiti, primo semestre 211/212 Ricordare: una funzione lipschitziana tra spazi metrici manda insiemi limitati in insiemi limitati; se il dominio di una funzione
.y 6. .y 4. .y 5. .y 2.y 3 B C C B. B f A B f -1
 Funzioni FUNZIONI Una funzione è una relazione fra due insiemi non vuoti e, che associa ad ogni elemento uno e un solo elemento. In simboli si scrive: = oppure. x 1. x..y B C.y 5 x 4..y 4 L elemento è
Funzioni FUNZIONI Una funzione è una relazione fra due insiemi non vuoti e, che associa ad ogni elemento uno e un solo elemento. In simboli si scrive: = oppure. x 1. x..y B C.y 5 x 4..y 4 L elemento è
Amministrazione, finanza e marketing - Turismo Ministero dell Istruzione, dell Università e della Ricerca PROGRAMMAZIONE DISCIPLINARE PER U. di A.
 UdA n. 1 Titolo: Disequazioni algebriche Saper esprimere in linguaggio matematico disuguaglianze e disequazioni Risolvere problemi mediante l uso di disequazioni algebriche Le disequazioni I principi delle
UdA n. 1 Titolo: Disequazioni algebriche Saper esprimere in linguaggio matematico disuguaglianze e disequazioni Risolvere problemi mediante l uso di disequazioni algebriche Le disequazioni I principi delle
Esercizi di GEOMETRIA e ALGEBRA LINEARE (Ingegneria Ambientale e Civile - Curriculum Ambientale)
") Esercizi di GEOMETRIA e ALGEBRA LINEARE (Ingegneria Ambientale e Civile - Curriculum Ambientale). Tra le seguenti matrici, eseguire tutti i prodotti possibili: 2 ( ) A = 0 3 4 B = C = 2 2 0 0 2 D = ( 0
Esercizi di GEOMETRIA e ALGEBRA LINEARE (Ingegneria Ambientale e Civile - Curriculum Ambientale). Tra le seguenti matrici, eseguire tutti i prodotti possibili: 2 ( ) A = 0 3 4 B = C = 2 2 0 0 2 D = ( 0
DISEGNO TECNICO INDUSTRIALE
 DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
TAVOLE E FORMULARI DI MATEMATICA PER LE SCUOLE MEDIE E SUPERIORI DI OGNI ORDINE E GRADO
 TAVOLE E FORMULARI DI MATEMATICA PER LE SCUOLE MEDIE E SUPERIORI DI OGNI ORDINE E GRADO Carlo Sintini www.matematicamente.it INDICE TAVOLE NUMERICHE Potenze e radici quadre e cube dei numeri fino a 200
TAVOLE E FORMULARI DI MATEMATICA PER LE SCUOLE MEDIE E SUPERIORI DI OGNI ORDINE E GRADO Carlo Sintini www.matematicamente.it INDICE TAVOLE NUMERICHE Potenze e radici quadre e cube dei numeri fino a 200
Rette e curve, piani e superfici
 Rette e curve piani e superfici ) dicembre 2 Scopo di questo articolo è solo quello di proporre uno schema riepilogativo che metta in luce le caratteristiche essenziali delle equazioni di rette e curve
Rette e curve piani e superfici ) dicembre 2 Scopo di questo articolo è solo quello di proporre uno schema riepilogativo che metta in luce le caratteristiche essenziali delle equazioni di rette e curve
ESERCIZI APPLICAZIONI LINEARI
 ESERCIZI APPLICAZIONI LINEARI PAOLO FACCIN 1. Esercizi sulle applicazioni lineari 1.1. Definizioni sulle applicazioni lineari. Siano V, e W spazi vettoriali, con rispettive basi B V := (v 1 v n) e B W
ESERCIZI APPLICAZIONI LINEARI PAOLO FACCIN 1. Esercizi sulle applicazioni lineari 1.1. Definizioni sulle applicazioni lineari. Siano V, e W spazi vettoriali, con rispettive basi B V := (v 1 v n) e B W
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare
 L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
Università degli Studi di Roma Tor Vergata. Corso di Laurea in Ingegneria Meccanica
 Università degli Studi di Roma Tor Vergata. Corso di Laurea in Ingegneria Meccanica Esame di Geometria (Prof. F. Tovena) Argomenti: Proprietà di nucleo e immagine di una applicazione lineare. dim V = dim
Università degli Studi di Roma Tor Vergata. Corso di Laurea in Ingegneria Meccanica Esame di Geometria (Prof. F. Tovena) Argomenti: Proprietà di nucleo e immagine di una applicazione lineare. dim V = dim
Appunti sul corso di Complementi di Matematica - prof. B.Bacchelli. 03 - Equazioni differenziali lineari omogenee a coefficienti costanti.
 Appunti sul corso di Complementi di Matematica - prof. B.Bacchelli 03 - Equazioni differenziali lineari omogenee a coefficienti costanti. Def. Si dice equazione differenziale lineare del secondo ordine
Appunti sul corso di Complementi di Matematica - prof. B.Bacchelli 03 - Equazioni differenziali lineari omogenee a coefficienti costanti. Def. Si dice equazione differenziale lineare del secondo ordine
Corso di Geometria, a.a Ing. Informatica e Automatica Esercizi VII: soluzioni
 Corso di Geometria, a.a. 2009-2010 Ing. Informatica e Automatica Esercizi VII: soluzioni 12 novembre 2009 1 Geometria dello spazio Esercizio 1 Dato il punto P 0 = ( 1, 0, 1) e il piano π : x + y + z 2
Corso di Geometria, a.a. 2009-2010 Ing. Informatica e Automatica Esercizi VII: soluzioni 12 novembre 2009 1 Geometria dello spazio Esercizio 1 Dato il punto P 0 = ( 1, 0, 1) e il piano π : x + y + z 2
Corso di Geometria - CdL triennale in Ingegneria a.a
 Corso di Geometria - CdL triennale in Ingegneria a.a. 208-9 C. Liverani, J. Garofali Tutorato del 7/05/9 Geometria analitica nel piano e nello spazio. Tra tutte le rette parallele a r : x 2y = 0 trovare
Corso di Geometria - CdL triennale in Ingegneria a.a. 208-9 C. Liverani, J. Garofali Tutorato del 7/05/9 Geometria analitica nel piano e nello spazio. Tra tutte le rette parallele a r : x 2y = 0 trovare
Geometria BAER Canale A-K Esercizi 9
 Geometria BAER Canale A-K Esercizi 9 Esercizio Sia (V,, ) uno spazio metrico Si mostri che se U V, v V, p U la proiezione ortogonale su U, allora v p U (v) U Soluzione: Il vettore v si scrive in modo unico
Geometria BAER Canale A-K Esercizi 9 Esercizio Sia (V,, ) uno spazio metrico Si mostri che se U V, v V, p U la proiezione ortogonale su U, allora v p U (v) U Soluzione: Il vettore v si scrive in modo unico
Corso di Geometria, a.a Ing. Informatica e Automatica Esercizi VI: soluzioni
 Corso di Geometria, a.a. 2009-2010 Ing. Informatica e Automatica Esercizi VI: soluzioni 5 novembre 2009 1 Geometria del piano e prodotto scalare Richiami. Il prodotto scalare di due vettori del piano v,
Corso di Geometria, a.a. 2009-2010 Ing. Informatica e Automatica Esercizi VI: soluzioni 5 novembre 2009 1 Geometria del piano e prodotto scalare Richiami. Il prodotto scalare di due vettori del piano v,
Un prototipo di 3D scanner
 Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Matematica 1 - Corso di Laurea in Ingegneria Meccanica
 Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
Lezione 6 Nucleo, Immagine e Teorema della Dimensione. 1 Definizione di Nucleo e Immagine
 Lezione 6 Nucleo, Immagine e Teorema della Dimensione In questa lezione entriamo nel vivo della teoria delle applicazioni lineari. Per una applicazione lineare L : V W definiamo e impariamo a calcolare
Lezione 6 Nucleo, Immagine e Teorema della Dimensione In questa lezione entriamo nel vivo della teoria delle applicazioni lineari. Per una applicazione lineare L : V W definiamo e impariamo a calcolare
1 Definizione: lunghezza di una curva.
 Abstract Qui viene affrontato lo studio delle curve nel piano e nello spazio, con particolare interesse verso due invarianti: la curvatura e la torsione Il primo ci dice quanto la curva si allontana dall
Abstract Qui viene affrontato lo studio delle curve nel piano e nello spazio, con particolare interesse verso due invarianti: la curvatura e la torsione Il primo ci dice quanto la curva si allontana dall
Università degli Studi di Roma La Sapienza Laurea in Ingegneria Energetica A.A. 2014-2015 Programma del corso di Geometria Prof.
 Università degli Studi di Roma La Sapienza Laurea in Ingegneria Energetica A.A. 2014-2015 Programma del corso di Geometria Prof. Antonio Cigliola Prerequisiti Logica elementare. Principio di Induzione.
Università degli Studi di Roma La Sapienza Laurea in Ingegneria Energetica A.A. 2014-2015 Programma del corso di Geometria Prof. Antonio Cigliola Prerequisiti Logica elementare. Principio di Induzione.
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
APPLICAZIONI LINEARI. B si definisce surriettiva. 9 quando ogni elemento di. B risulta IMMAGINE di. almeno un elemento di A.
 APPLICAZIONI LINEARI Siano V e W due spazi vettoriali, di dimensione m ed n sullo stesso campo di scalari R. Una APPLICAZIONE ƒ : V W viene definita APPLICAZIONE LINEARE od OMOMORFISMO se risulta, per
APPLICAZIONI LINEARI Siano V e W due spazi vettoriali, di dimensione m ed n sullo stesso campo di scalari R. Una APPLICAZIONE ƒ : V W viene definita APPLICAZIONE LINEARE od OMOMORFISMO se risulta, per
Liceo Scientifico G. Galilei Macerata
 Classe 3 Sez D Materia : Matematica Docente: Angelini Antonella Liceo Scientifico G. Galilei Macerata Anno Scolastico 2009-2010 Contratto Formativo Individuale 1.ANALISI DELLA CLASSE: Conoscenze Competenze
Classe 3 Sez D Materia : Matematica Docente: Angelini Antonella Liceo Scientifico G. Galilei Macerata Anno Scolastico 2009-2010 Contratto Formativo Individuale 1.ANALISI DELLA CLASSE: Conoscenze Competenze
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - Edile ed Edile-Architettura
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - Edile ed Edile-Architettura Primo Esonero del corso di Geometria Docente F. Flamini, Roma, 2//28 SOLUZIONI COMPITO I ESONERO Esercizio.
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - Edile ed Edile-Architettura Primo Esonero del corso di Geometria Docente F. Flamini, Roma, 2//28 SOLUZIONI COMPITO I ESONERO Esercizio.
Esercizi svolti sui numeri complessi
 Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
ISTITUTO TECNICO DEI TRASPORTI E LOGISTICA NAUTICO SAN GIORGIO. Programma di TECNOLOGIE E TECNICHE DI RAPPRESENTAZIONE GRAFICA a.s.
 ISTITUTO TECNICO DEI TRASPORTI E LOGISTICA NAUTICO SAN GIORGIO classe 1C Materiali, strumenti e convenzioni generali per il disegno tecnico con metodi tradizionali e computerizzati. Squadratura del foglio
ISTITUTO TECNICO DEI TRASPORTI E LOGISTICA NAUTICO SAN GIORGIO classe 1C Materiali, strumenti e convenzioni generali per il disegno tecnico con metodi tradizionali e computerizzati. Squadratura del foglio