Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici. Anno Accademico: 2012/13
|
|
|
- Natalia Lazzari
- 8 anni fa
- Visualizzazioni
Transcript
1 Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2012/13 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino Lupi SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO NELLA LOGISTICA INTERNA PARTE A 1 M. M. Lupi,"Sistemi di di Movimentazione e e Stoccaggio"- A.A. A.A. 2012/ /11 - Univ. - Univ. di Pisa di -Pisa Polo -della Polo Logistica della Logistica di Livorno di Livorno

2 Tipi di carrelli industriali - Carrelli elevatori frontali (carelli a forche frontali) Hanno il vantaggio della facilità di manovra, della velocità e di essere economici. Tra gli svantaggi vi è la larghezza richiesta per i corridoi di stivaggio e la limitata altezza di sollevamento. Fonte:SE 254 Robustus, Le forche sono montate su una piastra scorrevole lungo un montante verticale. Portata: 2500 kg; altezza di sollevamento: 3,2 m; lunghezza totale: 3,25 m; motore elettrico. 2

3 Europallet inserito nella scaffalatura secondo il lato lungo (lato corto affacciato al corridoio) Larghezza di corridoio richiesta 3
 Larghezza di")
4 Fonte: SHR60, Portata: 6000 Kg; altezza di sollevamento: 3,17 m; lunghezza: 4,415m; motore diesel 4

5 Europallet inserito nella scaffalatura secondo il lato lungo (lato corto affacciato al corridoio) Larghezza di corridoio richiesta 5
 Larghezza di")
6 Fonte:Crown RR5200, Esempio Portata: kg; altezza di sollevamento fino a 10 m; motore elettrico. Carrelli elevatore a forche retrattili Il funzionamento è simile a quello a forche frontali. Il vantaggio del meccanismo che permette di retrarre le forche è che diminuisce gli spazi di manovra necessari. I carrelli a forche retrattili consentono di operare in corridoi più stretti rispetto ai tradizionali carrelli con forche a sbalzo. Richiedono una larghezza del corridoio di circa 2,5-3 metri. (inoltre possono essere utilizzati in magazzini che possono arrivare a 10m di altezza) Sono però meno veloci e l impiego è limitato solo agli spazi interni. 6

7 Fonte:Crown RR5200, Esempio: Crown RR5200 7
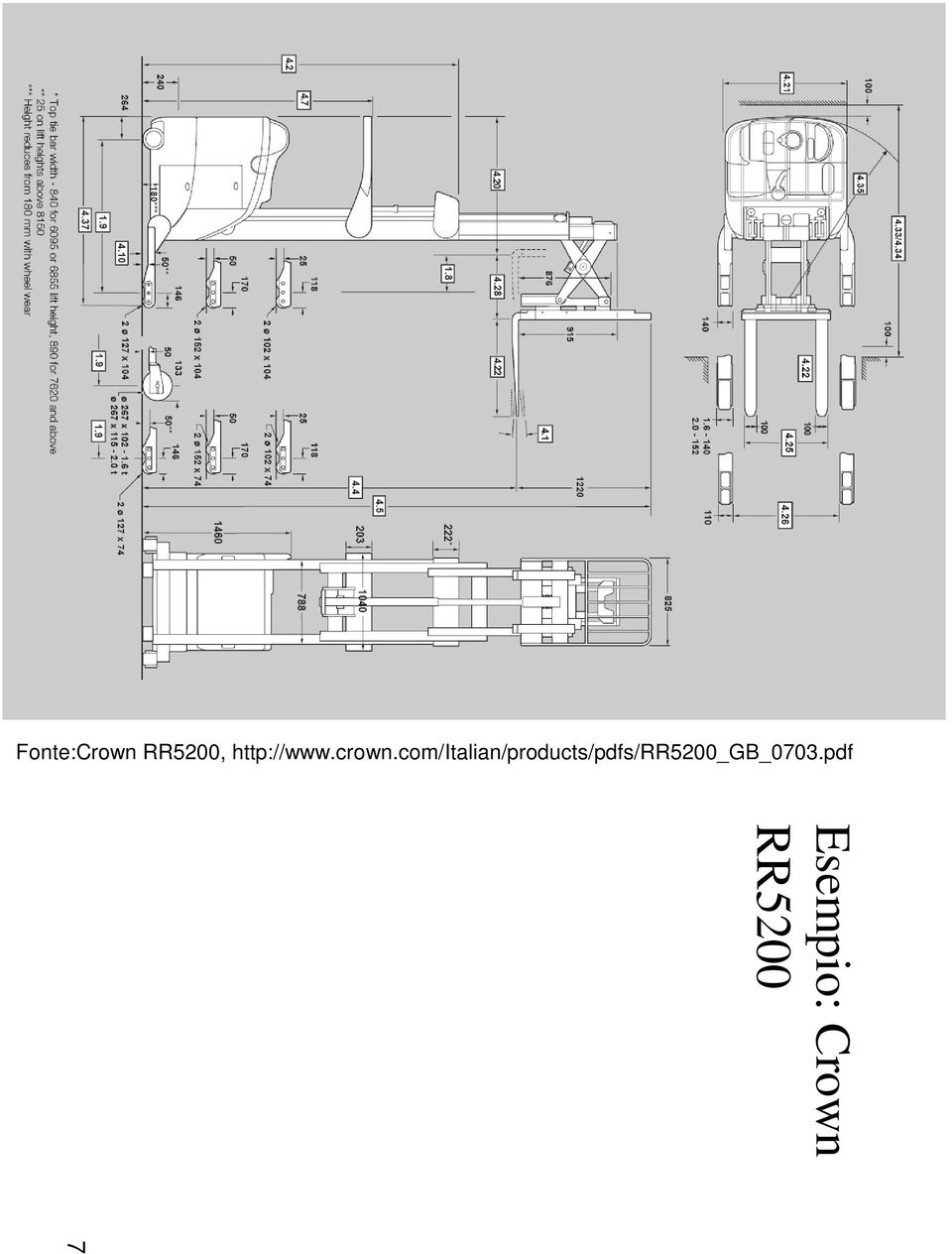
8 Altezza di sollevamento Ingombro corridoio Europallet inserito nella scaffalatura secondo il lato lungo (lato corto affacciato al corridoio) 8

9 Fonte:Serie TE Picking, Carrelli magazzinieri o commissionatori Sono carrelli a posto di guida sollevabile, utilizzati per le operazioni di picking manuale L operatore gira per il magazzino con una lista di prelievo (picking list) relativa ad un ordine. Il picker, quando arriva in prossimità di un prodotto da prelevare, si ferma e lo preleva e lo deposita sul pallet che verrà, successivamente, controllato, confezionato e spedito. -Esempio Altezza di prelievo: 3,5 m; portata: 700 kg; motore elettrico. 9

10 Larghezza richiesta per il corridoio Europallet inserito nella scaffalatura secondo il lato corto (lato lungo affacciato al corridoio) Larghezza di corridoio richiesta Fonte:Serie TE Picking, 10

11 Principio operativo dei carrelli elevatori trilaterali: non è richiesta la sterzatura del veicolo nei corridoi fra gli scaffali. Il carrello avanza (avanti e indietro) mentre il dispositivo, di cui è equipaggiato il carrello, permette alle forche di fare prelievi sulla destra e sulla sinistra del corridoio Carrelli elevatori trilaterali Questi carrelli hanno il notevole vantaggio di potere operare in corridoi estremamente ristretti: fino a 1,5-1,7 m. Sono più lenti dei carrelli frontali (inoltre sono adatti solo per spazi interni) Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,
 Fonte:Caron F., Marchet G. e Wegner R.")
12 - Esempio Fonte: Features TEKH12 Capacity 1200 kg Min. working aisle width 1700 mm Max. lifting height 9000 mm 12

13 Automated guided vehicle (AGV) Gli AGV sono veicoli : senza guidatore, controllati da computer, equipaggiati con motore elettrico, capaci di trasportare e movimentare carichi. Primo AGV costruito ed utilizzato (1953) 13

14 Alcuni veicoli AGV sono simili a quelli tradizionali visti precedentemente (carrelli industriali a forche): possiamo definirli unità di movimentazione interne automatizzate. Fonte: Grado Dept. of Industrial and System Engineering at Virginia Tech. 14

15 Altri veicoli AGV servono a trasportare unità di carico. Essi possono essere considerati unità di trasporto interne automatizzate. Fonte: Grado Dept. of Industrial and System Engineering at Virginia Tech. 15

16 Altri veicoli AGV sono utilizzati per trainare dei carrelli (rimorchi, trailers ). Sono simili a quello originario del Anche questi hanno la funzione di unità di trasporto interne (automatiche). Fonte: Grado Dept. of Industrial and System Engineering at Virginia Tech. 16
. Fonte: Grado Dept.")
17 Un sistema di trasporto AGV è composto dai seguenti componenti principali: - I carrelli a guida automatica: che sono dotati di un calcolatore di bordo e sono alimentati da batterie. - Un impianto che permette di guidare i carrelli lungo gli itinerari prestabiliti - Un sistema (calcolatore) di controllo centrale che permette di gestire l intero impianto - Un sistema di trasmissione, comandi e informazioni, fra sistema di controllo centrale e carrelli AGV

18 I sistemi di guida di un AGV possono essere a percorso fisso: - Guida ottica Si basa su una striscia fotosensibile in materiale gommoso di circa 3 cm di larghezza applicata al pavimento. Il veicolo è dotato di una telecamera. in grado di leggere la striscia. Sono generati segnali elettrici corrispondenti alla posizione della traccia. Un circuito di controllo converte questi segnali in movimenti per il sistema sterzante del veicolo. 18

19 - Guida Magnetica (Guida induttiva) I veicoli seguono un cavo multipolare incassato nel pavimento ad una profondità di cm. Il cavo è percorso da una corrente elettrica che induce un campo magnetico, attorno al filo. A bordo del veicolo vi è una antenna che converte il campo magnetico in segnale elettrico (un circuito di controllo converte questi segnali in movimenti per il sistema sterzante del veicolo). L antenna segue la frequenza, e quindi il filo che definisce un percorso, imposta dal sistema di controllo, fino a quando il sistema non dice di seguire un altra frequenza, e quindi il filo che definisce un altro percorso. Fonte: Grado Dept. of Industrial and System Engineering at Virginia Tech. 19
.")
20 I sistemi di guida di un AGV possono essere a percorso variabile: - Guida laser: un elemento rotante disposto sul carrello emette un raggio laser (totalmente innocuo per persone e cose). Il raggio laser colpisce degli oggetti riflettenti ( detti catarifrangenti) disposti lungo il percorso (il computer di bordo deve vederne almeno tre per individuare la posizione del carrello). Il computer di bordo del veicolo, in base ai tempi di riflessioni dei raggi laser, è in grado di calcolare la posizione del veicolo in coordinate assolute x e y oltre che la sua posizione angolare. L itinerario è un insieme di coordinate memorizzate nella memoria del computer di bordo Il computer di bordo, che ha memorizzata una mappa della zona attraversata, confronta la posizione del veicolo con il percorso programmato e fornisce correzioni al sistema sterzante del veicolo. Fonte: Grado Dept. of Industrial and System Engineering at Virginia Tech.

21 - Magnet-Gyro guidance : è il sistema di guida che è stato visto a proposito delle applicazioni ai terminali portuali. Un sistema di controllo centrale dirige e assegna i compiti ai veicoli. Il veicolo è dotato di un giroscopio che misura con precisione l'orientamento del veicolo nel piano. Inoltre il veicolo è dotato di un odometro collegato alle ruote che misura il modulo della velocità di spostamento. Come nel caso della navigazione laser l itinerario è un insieme di coordinate memorizzate nella memoria del computer di bordo. Le comunicazioni con il centro di controllo avvengono via radio. Lungo il percorso si trovano delle placche magnetiche di riferimento, annegate nella pavimentazione. Sensori magnetici, posti sotto il carrello, rilevano la presenza dei marker magnetici. Il computer di bordo calcola la posizione effettiva (coordinate X e Y) dell AGV in base ai marker magnetici. L informazione viene utilizzata per le necessarie correzioni di direzione che sono continuamente misurate dal giroscopio. 21
22 A proposito della sicurezza, ( in modo simile a come è stato messo in evidenza nell utilizzo di AGV nei terminal marittimi) ciascun veicolo ha un area di pertinenza. La velocità degli AGV, per la movimentazione interna, varia fra i 100 e i 300 piedi al minuto (1,8-5,5 km/h circa, quelli utilizzati nei terminali marittimi arrivano a, circa, 11 km/h) 22
23 Veicolo di tipo AGV sono in sviluppo anche per il trasporto delle persone: PAT (PERSONAL AUTOMATED TRANSPORT) Sistema Ultra (UK) E il sistema allo stadio più avanzato di realizzazione : presso il nuovo 23 M. terminal Lupi,"Sistemi 5 di dell aeroporto Movimentazione e Stoccaggio"- di Heathrow A.A. 2010/11 a Londra. - Univ. di Pisa - Polo della Logistica di Livorno
24 Sistemi di movimentazione operanti su percorsi fissi Sistemi non motorizzati Sistemi di movimentazione operanti su percorsi fissi Sistemi motorizzati 24
25 Sistemi non motorizzati Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,1997. Fonte: 25
26 Sistemi di movimentazione motorizzati operanti su percorsi fissi Dispositivi di movimentazione fissi: i componenti del dispositivo non accompagnano i carichi nel loro movimento. Dispositivi di movimentazione mobili, ma vincolati: i componenti del dispositivo accompagnano i carichi; i componenti non possono però essere rimossi dalla linea. Dispositivi di movimentazione mobili e svincolabili: i componenti del dispositivo accompagnano i carichi e possono essere rimossi dalla linea. 26
27 Sistemi di movimentazione motorizzati operanti su percorsi fissi con dispositivi di movimentazione fissi - Trasportatori a rulli ( rulliere motorizzate) Fonte: Il movimento dei rulli motori è assicurato da una trasmissione a catena o a cinghia 27
28 Trasportatore a rulli che movimenta un pallet Fonte: 28
29 - Trasportatori a rotelle Fonte: 29
30 Sistemi di movimentazione motorizzati operanti su percorsi fissi con dispositivi di movimentazione mobili, ma vincolati Trasportatori a catena: Usano una o più catene sulle quali i carichi sono trasportati direttamente. Fonte: Fonte: 30 Fonte:
31 Fonte: Trasportatori a nastro Trasportatori a tapparelle Fonte: Fonte: 31
32 Trasportatori aerei a catena di tipo power Questi sistemi sono costituiti da una monorotaia che supporta dei carrelli a cui sono agganciati i dispositivi contenitori. Un unica catena traente (power), che si snoda lungo tutto il percorso, traina i carrelli ed i contenitori dei carichi. Fonte: I componenti del dispositivo (contenitori dei carichi) non possono essere rimossi dalla linea. 32
33 Catena traente scorrevole all interno di una guida metallica sospesa Fonte: 33
34 Sistemi di movimentazione motorizzati operanti su percorsi fissi con contenitori dei carichi mobili e svincolabili. Trasportatori aerei a catena di tipo power-and-free Sono dei trasportatori a catena simili a quelli precedenti, ma c è la possibilità di scollegare i contenitori dei carichi dalla catena traente. Fonte: 34
35 Le unità di trasporto possono essere svincolate dalla linea di movimentazione senza arrestare il trasportatore. Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,
36 Fonte: Esempi di trasportatori a catena di tipo power-andfree. 36
37 Questo tipo di trasportatori (convogliatori) permette di realizzare delle zone di accumulo e di stazionamento dei materiali in cui è presente solo la guida free e verso le quali le bilancelle portacarichi possono essere deviate anche manualmente. I convogliatori aerei di tipo power-and-free sono più versatili di quelli di tipo power, hanno però maggiori costi di investimento, esercizio e manutenzione. 37
38 Sistemi di stoccaggio delle unità di carico nei magazzini Tipologia di stoccaggio delle unità di carico Sovrapposizione diretta delle u.c. (catasta) Scaffalature bifronti di tipo tradizionale Scaffalature drive-in (drivethrough) Scaffalature dinamiche a Scaffalature gravità. Scaffalature mobili ad alto indice di utilizzazione volumetrica. Scaffalature automatizzate dotate di trasloelevatori. 38
39 Indici di un magazzino: relativi allo stoccaggio Il coefficiente (indice) di utilizzazione superficiale di un magazzino (definizione) è dato dalle unità di carico (quantità di merce) immagazzinabili per metro quadro di area di stoccaggio. Indice di selettività di un magazzino (definizione): è il rapporto fra il numero di unità di carico direttamente accessibili ed il numero totale di unità di carico stoccate. Coefficiente (indice) di utilizzazione volumetrica di un magazzino (definizione): è il rapporto fra il volume dei materiali immagazzinati ed il volume totale del locale che costituisce il magazzino. 39
40 Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,1997. Catasta I pallet sono sovrapposti in modo diretto in blocchi monoprodotto separati da corridoi necessari per la movimentazione Questo sistema di stoccaggio presuppone un alto numero di prodotti per singola voce (ossia può andare quando si gestiscono grandi quantitativi di merce simile). E un sistema che non prevede investimento in strutture di stoccaggio; ha una limitata capacità di ottimizzazione in altezza (e quindi un limitato coefficiente di utilizzazione superficiale, seppure la superficie coperta da merce sia elevata); ha una selettività ridotta. 40
41 Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,1997. Scaffalature bifronti di tipo tradizionale Questa scaffalatura ha il vantaggio di avere un indice di selettività unitario. Alto indice di utilizzazione superficiale nel caso di scaffalature alte (e ovviamente macchine di movimentazione che possono arrivare ad altezze elevate), c è però il problema dei corridoi che, a seconda della macchina utilizzata, possono essere ampi 41
42 Scaffalature drive-in (drive-through) Fonte: La scaffalatura di tipo drive-in è composta dalle spalle ( elementi verticali di sostegno) che sono collegate fra loro in sommità. Esse sono dotate di mensole: fatte in modo che il carrello possa entrare fra i pallet stoccati. Il vantaggio di questa tipologia è l alta densità di stoccaggio: in quanto sono eliminati buona parte dei corridoi. Alta densità di stoccaggio vuol dire: sia coefficiente di utilizzazione superficiale, sia coefficiente di utilizzazione volumetrico, elevati. Naturalmente si ha però un basso indice di selettività. 42
43 Fonte: Nella scaffalatura drive-in il materiale entra ed esce dalla stessa via di accesso. Si ha una logica LIFO (Last-In, First-Out): l ultima unità di carico ad essere stoccata è la prima ad essere prelevata. Nella scaffalatura drive-through invece il materiale entra da una via di accesso ed esce da un altra. Si ha una logica FIFO (First- In, First-Out): la prima unità di carico ad essere stoccata è la prima 43 ad essere prelevata
44 A differenza del sistema a catasta questo sistema permette di sfruttare meglio l eventuale altezza rilevante del magazzino e si adatta a prodotti non sovrapponibili. Inoltre, rispetto alla catasta, il drive in, e il drive-through permettono una migliore selettività dei pallet, ma ovviamente decisamente inferiore alle scaffalature bifronti di tipo tradizionale. 44
45 Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,1997. Fonte: Magazzini dinamici a gravità ( live storage ) Gli scaffali a gravità consentono il carico dei materiali da immagazzinare da un lato ed il successivo prelievo dall altro. Le scaffalature sono dotate di piani a rulli, opportunamente inclinati. Questo tipo di scaffalature consente l'accumulo per gravità delle unità di carico. Le unità di carico sono stoccate secondo il principio FIFO (First-In, First- Out). 45
46 La logica FIFO è una soluzione indispensabile nello stoccaggio di materiali soggetti a deperibilità e scadenza A differenza delle scaffalature di tipo drive l operatore con il carrello non deve entrare tra le scaffalature, ma deve immettere e prelevare l unità di carico ai margini della corsia data. Fonte: I coefficienti di utilizzazione superficiale (e volumetrica) per queste scaffalature sono alti Nella scaffalatura a gravità una corsia si riferisce ad una voce (si ha perciò una selettività ridotta, come nel caso drive ). 46
47 Si parla di magazzino dinamico (al contrario di quello drive e a scaffalature tradizionali) perché l unità di carico cambia la posizione nel tempo. Rispetto al caso drive sia ha una maggiore sicurezza: in quanto il carrello non deve entrare negli scaffali e, per la stessa ragione, sia ha un minore tempo di prelievo e di immissione delle unità di carico. Fonte: Magazzini a gravità leggeri 47
48 Esistono anche magazzini a gravità leggeri: adatti a piccole unità di carico come scatole e cartoni. Vi sono corridoi dedicati alle immissione e corridoi dedicati ai prelievi. La logica di immissione è di tipo FIFO e la densità di utilizzazione del magazzino è alta Fonte: 48
49 Magazzini a scaffali mobili Gli scaffali sono in grado di traslare in modo da consentire l apertura del corridoio per accedere ai materiali voluti. Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,
50 Le applicazioni tipiche di questi magazzini sono gli archivi di documenti cartacei. Hanno elevatissimi coefficienti di utilizzazione volumetrica Fonte: 50
51 Magazzini intensivi dotati di trasloelevatori Sono costituiti da una serie di scaffalature fra le quali si muove, contemporaneamente in senso orizzontale e verticale, un trasloelvatore. Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,
52 Si parla di magazzino pesante se le unità di carico che sono movimentate hanno peso superiore ai 500 kg. La maggior parte dei magazzini automatici pesanti ha trasloelvatori che possono trattare unità di carico di 1-1,5 tonnellate; però si può arrivare anche a 3 tonnellate (ed oltre). Fonte: 52
53 Il trasloelevatore è costituito da una piattaforma in grado di eseguire l operazione di immissione o prelievo di un pallet (oppure di una cassa o di unità di carico di dimensione ridotte). Il trasloelevatore scorre su una colonna che gli permette i movimenti in senso verticale, contemporaneamente questa colonna si muove orizzontalmente su dei binari. La larghezza del corridoio può essere estremamente ridotta, 1,4-1,8 m, che corrispondono praticamente alla lunghezza del pallet, tenuto conto dei giochi necessari per la movimentazione. Fonte: 53
54 Disposizione delle unità di carico nelle scaffalature Modulo unitario di un magazzino: il più piccolo elemento che replicato permette di ottenere l intera struttura del magazzino Ammettiamo di avere un 130 pallet 80X120. Considerando 10 cm di margine per parte abbiamo 100 un posto pallet di queste dimensioni. 90 Nel caso della configurazione A il corridoio deve essere più ampio, rispetto alla configurazione B, di 40 cm. 140
55 Per esempio ammettiamo di utilizzare un carrello elevatore frontale: Larghezza corridoio caso A = 3,70 m Larghezza corridoio caso B = 3,30 m Superficie modulo (A) = 1 (3, x 1,30) = 6,30 mq Superficie modulo (B) = 1,40 (3, x 0,90) = 7,14 mq Appare più favorevole la disposizione A 55
56 Consideriamo invece il caso di un carrello trilaterale che opera in corridoi molto stretti: Larghezza corridoio caso A = 2,1 m Larghezza corridoio caso B = 1,7 m Superficie modulo (A) = 1 (2,1 + 2 x 1,30) = 4,70 mq Superficie modulo (B) = 1,40 (1,7 + 2 x 0,90) = 4,90 mq In questo caso la differenza fra la disposizione A e B si riduce notevolmente 56
57 Nel caso di un magazzino automatizzato (con trasloelevatori) si hanno corridoi ancora più stretti: Larghezza corridoio caso A = 1,8 m Larghezza corridoio caso B = 1,4 m Superficie modulo (A) = 1 (1,8+ 2 x 1,30) = 4,40 mq Superficie modulo (B) = 1,40 (1,4 + 2 x 0,90) = 4,48 mq In questo caso le due configurazioni sono praticamente equivalenti 57
58 In ogni caso la disposizione A permette di ridurre la lunghezza dei corridoi e quindi il tempo variabile necessario per raggiungere un determinato posto pallet. Quella B, d altra parte, permette una riduzione del tempo fisso del ciclo forche (tempo di immissione o estrazione di un pallet dal suo posto), in quanto nel caso A la profondità della cella è maggiore rispetto alla configurazione B. Infine nel caso di picking risulta superiore la configurazione B in quanto è più facile il prelievo manuale dei colli dai pallet. 58
59 Coefficiente di utilizzazione superficiale di un magazzino Il coefficiente di utilizzazione superficiale di un magazzino (definizione) è dato dalle unità di carico immagazzinabili per metro quadro di area di stoccaggio. Esempio 1 - Ammettiamo di avere un magazzino con le caratteristiche di seguito riportate, in cui è stato previsto come unità di movimentazione un carrello elevatore frontale: - scaffale di tipo bifronte - dimensioni pallet = 0,80 m x 1,20 m x 1,20 m - dimensioni posto pallet = 1 m x 1,30 m x 1,40 m - ampiezza corridoio = 3,70 m - altezza presa forche= 3,2 m 59
60 Calcoliamo le dimensioni del modulo unitario in pianta assumendo una configurazione di tipo A Superficie modulo unitario = 1 (3,7 + 2 x 1,30) = 6,3 mq Il numero di livelli di stoccaggio ottenibili è pari a : Int ( 3,2/1,4) + 1= 2+1= 3 L altezza della scaffalatura compreso l ultimo livello è pari a: 3 x 1,4 = 4,2 m Il numero di pallet per modulo unitario è pari a 6 e quindi: C ut. sup. 6 pallet/modulo = = 2 6,3 m /modulo 0,95 pallet / m 2 60
61 Esempio 2 - Ammettiamo di avere un magazzino con le caratteristiche di seguito riportate in cui è stato previsto come unità di movimentazione un carrello a forche retrattili: - scaffale di tipo bifronte - dimensioni pallet = 0,80 m x 1,20 m x 1,20 m - dimensioni posto pallet = 1 m x 1,30 m x 1,40 m - ampiezza corridoio = 3 m - altezza presa forche= 10 m Calcoliamo le dimensioni del modulo unitario in pianta assumendo una configurazione di tipo A Superficie modulo unitario = 1 (3 + 2 x 1,30) = 5,6 mq 61
62 Il numero di livelli di stoccaggio ottenibili è pari a : Int ( 10/1,4) + 1 = 7+1= 8 L altezza della scaffalatura compreso l ultimo livello è pari a: 8 x 1,4 = 11,2 m Il numero di pallet per modulo unitario è pari a 16 e quindi: C ut. sup. = 16 pallet/modulo 2 5,6 m /modulo = 2,86 pallet / m 2 62
63 Esempio 3 - Ammettiamo di avere un magazzino con le caratteristiche di seguito riportate in cui è stato previsto come unità di movimentazione un carrello elevatore trilaterale operante su un corridoio molto stretto: - scaffale di tipo bifronte - dimensioni pallet = 0,80 m x 1,20 m x 1,20 m - dimensioni posto pallet = 1 m x 1,30 m x 1,40 m - ampiezza corridoio = 1,8 m - altezza presa forche = 9 m Superficie modulo unitario (configurazione tipo A) = 1 (1,8 + 2 x 1,30) = 4,4 mq Il numero di livelli di stoccaggio ottenibili è pari a : Int ( 9/1,4)+1 = 6+1= 7 63
64 L altezza della scaffalatura compreso l ultimo livello è pari a: 7 x 1,4 = 9,8 m Il numero di pallet per modulo unitario è pari a 14 e quindi: C ut. sup. = 14 pallet/modulo 2 4,4 m /modulo = 3,18 pallet / m 2 64
65 Esempio 4 - Calcolo del coefficiente di utilizzazione superficiale nel caso di un magazzino di tipo live storage (dinamico a gravità). Ammettiamo di avere i seguenti dati: - dimensioni pallet = 0,80 m x 1,20 m x 1,20 m - dimensioni posto pallet = 1 m x 1,20 m x 1,40 m - lunghezza del canale 12 m (10 pallet) - inclinazione del canale: 4 - ampiezza corridoi laterali = 3,5 m - altezza massima presa forche= 6,5 m 65
66 Fonte:Caron F., Marchet G. e Wegner R. Impianti di movimentazione e stoccaggio dei materiali, Hoepli,1997. Superficie modulo unitario = 1 (10 x 1,2 + 2 x 3,50) = 19 mq Il numero dei livelli di stoccaggio deve tenere conto dell altezza hp che non è utilizzabile h p = 12 tg4 = 0, 84 m 66
67 Il numero di livelli di stoccaggio è perciò dato da: Int ( ( 6,5-0,84) /1,4)+1 = = 5 L altezza della scaffalatura compreso l ultimo livello è pari a: 0, x 1,4 = 7,84 Il numero di pallet per modulo unitario è pari a 50 e quindi: C ut. sup. = 50 pallet/modulo 2 19 m /modulo = 2,63 pallet / m 2 67
68 Esempio 5 - Calcolo del coefficiente di utilizzazione superficiale nel caso di un magazzino automatizzato con trasloelevatori. Ammettiamo di avere i seguenti dati: - scaffale di tipo bifronte - dimensioni pallet = 0,80 m x 1,20 m x 1,20 m - dimensioni posto pallet = 1 m x 1,30 m x 1,40 m - ampiezza corridoio = 1,6 m - livelli di stoccaggio =12 Superficie modulo unitario = 1 (1,6 + 2 x 1,30) = 4,2 mq - altezza della struttura: 12 x 1,4 = 16,8 m 68
69 Il numero di pallet per modulo unitario è pari a 24 e quindi: C ut. sup. = 24 pallet/modulo 2 4,2 m /modulo = 5,71 pallet / m 2 Con questo tipo di magazzino si possono raggiungere valori molto alti del coefficiente di utilizzazione superficiale. 69
Università di Pisa - Polo Sistemi Logistici di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici. Anno Accademico: 2013/14
 Università di Pisa - Polo Sistemi Logistici di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2013/14 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente:
Università di Pisa - Polo Sistemi Logistici di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2013/14 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente:
Sistemi di stoccaggio
 Sistemi di stoccaggio I sistemi di stoccaggio possono richiedere o meno l impiego di attrezzature, con riflessi diretti sui costi per postazione. D altra parte al variare del sistema si ottengono risultati
Sistemi di stoccaggio I sistemi di stoccaggio possono richiedere o meno l impiego di attrezzature, con riflessi diretti sui costi per postazione. D altra parte al variare del sistema si ottengono risultati
Esse vengono definite "mezzi mobili" e possono essere raggruppate in due grandi categorie: trasportatori continui e trasportatori discontinui.
 Mezzi di handling Tra le attrezzature che operano nel magazzino sono particolarmente importanti i mezzi che seguono il materiale (per lo meno con una parte) durante i suoi movimenti. Esse vengono definite
Mezzi di handling Tra le attrezzature che operano nel magazzino sono particolarmente importanti i mezzi che seguono il materiale (per lo meno con una parte) durante i suoi movimenti. Esse vengono definite
Utilizzazione superficiale
 Utilizzazione superficiale Si definisce modulo unitario il più piccolo elemento che, replicato, consente di ottenere l intera area di stoccaggio del magazzino. Per ciascuno dei tipi di magazzino visti
Utilizzazione superficiale Si definisce modulo unitario il più piccolo elemento che, replicato, consente di ottenere l intera area di stoccaggio del magazzino. Per ciascuno dei tipi di magazzino visti
CARRELLI ELEVATORI TRILATERALI
 CARRELLI ELEVATORI TRILATERALI Uomo a terra Uomo a bordo (carrello combinato) FEAII - Material Handling (I) -1- CARRELLI ELEVATORI TRILATERALI (vista dall alto) guide a terra FEAII - Material Handling
CARRELLI ELEVATORI TRILATERALI Uomo a terra Uomo a bordo (carrello combinato) FEAII - Material Handling (I) -1- CARRELLI ELEVATORI TRILATERALI (vista dall alto) guide a terra FEAII - Material Handling
Carrelli per il trasporto e il
 Trasporti interni Carrelli per il trasporto e il sollevamento Classificazione dei carrelli Tipologie esistenti Caratteristiche e prestazioni Predisposizioni antinfortunistiche 2 2005 Politecnico di Torino
Trasporti interni Carrelli per il trasporto e il sollevamento Classificazione dei carrelli Tipologie esistenti Caratteristiche e prestazioni Predisposizioni antinfortunistiche 2 2005 Politecnico di Torino
Lo stoccaggio dei materiali può avvenire sia a terra si su apposite attrezzature: gli scaffali.
 Mezzi di warehousing Le attrezzature per lo stoccaggio comprendono tutti i mezzi che non possono seguire il materiale durante i suoi movimenti. Si tratta quindi di "mezzi fissi", cioè di attrezzature facenti
Mezzi di warehousing Le attrezzature per lo stoccaggio comprendono tutti i mezzi che non possono seguire il materiale durante i suoi movimenti. Si tratta quindi di "mezzi fissi", cioè di attrezzature facenti
Picking. Contenuto della lezione
 Picking Contenuto della lezione Introduzione Picking manuale Picking automatizzato Conclusioni Politecnico di Torino Pagina 1 di 14 Obiettivi della lezione Panoramica sulle soluzioni impiantistiche di
Picking Contenuto della lezione Introduzione Picking manuale Picking automatizzato Conclusioni Politecnico di Torino Pagina 1 di 14 Obiettivi della lezione Panoramica sulle soluzioni impiantistiche di
SISTEMI DI STOCCAGGIO
 SISTEMI DI STOCCAGGIO una sola apertura di accesso alle corsie dimensionata in relazione al mezzo di movimentazione elevata saturazione superficiale e volumetrica prodotti a bassa movimentazione elevati
SISTEMI DI STOCCAGGIO una sola apertura di accesso alle corsie dimensionata in relazione al mezzo di movimentazione elevata saturazione superficiale e volumetrica prodotti a bassa movimentazione elevati
ELEVATORI PER NASTRI
 NASTRI TRASPORTATORI ELEVATORI PER NASTRI ELEVATORE CONTINUO A RIPIANI Per le esigenze di trasporto in verticale realizziamo elevatori verticali a piano fisso. Queste apparecchiature svolgono sia la funzione
NASTRI TRASPORTATORI ELEVATORI PER NASTRI ELEVATORE CONTINUO A RIPIANI Per le esigenze di trasporto in verticale realizziamo elevatori verticali a piano fisso. Queste apparecchiature svolgono sia la funzione
Fondamenti di Economia Aziendale ed Impiantistica Industriale
 Politecnico di Milano IV Facoltà di Ingegneria Fondamenti di Economia Aziendale ed Impiantistica Industriale Material Handling FEAII - Material Handling (I) SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO INDICE
Politecnico di Milano IV Facoltà di Ingegneria Fondamenti di Economia Aziendale ed Impiantistica Industriale Material Handling FEAII - Material Handling (I) SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO INDICE
Introduzione alla logistica industriale
 Introduzione alla logistica industriale Definizione di logistica La logistica nasce in ambito militare, con l obiettivo principale di ottimizzare il trasporto e il dislocamento delle truppe e dei materiali.
Introduzione alla logistica industriale Definizione di logistica La logistica nasce in ambito militare, con l obiettivo principale di ottimizzare il trasporto e il dislocamento delle truppe e dei materiali.
Numero carrelli senza guidatore a bordo presenti in azienda
 Pagina 1di 11 AZIENDA Redatto da Verificato Approvato Ines Magnani Carlo Veronesi Massimo Magnani firma firma TIPO SCHEDA A formazione ed informazione dei lavoratori NUMERO DI SCHEDE DATA VERIFICATO RI
Pagina 1di 11 AZIENDA Redatto da Verificato Approvato Ines Magnani Carlo Veronesi Massimo Magnani firma firma TIPO SCHEDA A formazione ed informazione dei lavoratori NUMERO DI SCHEDE DATA VERIFICATO RI
In Pallet Carrier / Under Pallet Carrier.
 In Pallet Carrier / Under Pallet Carrier. Sistemi Shuttle per lo stoccaggio di merce in multiprofondità. Compattezza. Efficienza. Produttività. La soluzione completa. Sistemi di stoccaggio compatto per
In Pallet Carrier / Under Pallet Carrier. Sistemi Shuttle per lo stoccaggio di merce in multiprofondità. Compattezza. Efficienza. Produttività. La soluzione completa. Sistemi di stoccaggio compatto per
Magazzini automatici serie AW
 Magazzini automatici serie AW Una singola installazione può essere costituita da uno o più traslo elevatori. La larghezza della corsia centrale può essere realizzata con due diverse larghezze: la corsia
Magazzini automatici serie AW Una singola installazione può essere costituita da uno o più traslo elevatori. La larghezza della corsia centrale può essere realizzata con due diverse larghezze: la corsia
Unità 3. Magazzini industriali
 Impianti industriali Unità 3 Magazzini Gestione scorte Picking 2 2005 Politecnico di Torino 1 Conoscere le principali tipologie di magazzini industriali e le relative applicazioni Obiettivi Definire le
Impianti industriali Unità 3 Magazzini Gestione scorte Picking 2 2005 Politecnico di Torino 1 Conoscere le principali tipologie di magazzini industriali e le relative applicazioni Obiettivi Definire le
m60-90 - 120 La risposta alle vostre esigenze di stoccaggio
 m60 90 120 La risposta alle vostre esigenze di stoccaggio m6090120 LA QUALITÀ, LA RAPIDITÀ, LA DURATA, LA Le scaffalature della serie M6090120 sono sistemi flessibili e versatili, capaci di rispondere
m60 90 120 La risposta alle vostre esigenze di stoccaggio m6090120 LA QUALITÀ, LA RAPIDITÀ, LA DURATA, LA Le scaffalature della serie M6090120 sono sistemi flessibili e versatili, capaci di rispondere
Trasporti meccanici mobili
 Trasporti interni Convogliatori aerei a catena monorotaia birotaia Convogliatori a carrelli convogliatori a catena a pavimento convogliatori con catena aerea convogliatori con catena sotto piano pavimento
Trasporti interni Convogliatori aerei a catena monorotaia birotaia Convogliatori a carrelli convogliatori a catena a pavimento convogliatori con catena aerea convogliatori con catena sotto piano pavimento
CASEhistory. Fino a 2.000 pallet. in uscita ogni giorno DRINK INTERNATIONAL
 DRINK INTERNATIONAL CASEhistory Fino a 2.000 pallet in uscita ogni giorno Drink International: un magazzino per la gestione ed assemblaggio di cesti e scatole regalo per il canale GDO. Il sistema è interamente
DRINK INTERNATIONAL CASEhistory Fino a 2.000 pallet in uscita ogni giorno Drink International: un magazzino per la gestione ed assemblaggio di cesti e scatole regalo per il canale GDO. Il sistema è interamente
APPLICATION SHEET Luglio
 Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Logistica Industriale
 AGENDA Mezzi di movimentazione e materials handling Sistemi di trasporto continuo e di smistamento Aree funzionali dei magazzini Parametri di prestazione dei sistemi di stoccaggio Panoramica dei sistemi
AGENDA Mezzi di movimentazione e materials handling Sistemi di trasporto continuo e di smistamento Aree funzionali dei magazzini Parametri di prestazione dei sistemi di stoccaggio Panoramica dei sistemi
modulog Combinazioni di moduli per la tecnica della manipolazione
 modulog Combinazioni di moduli per la tecnica della manipolazione Facile gestione di carichi pesanti - un valore aggiunto per la produttività La manipolazione ed il montaggio manuale di carichi pesanti
modulog Combinazioni di moduli per la tecnica della manipolazione Facile gestione di carichi pesanti - un valore aggiunto per la produttività La manipolazione ed il montaggio manuale di carichi pesanti
Le scaffalature di magazzino
 Le scaffalature di magazzino Marzo 2005 I diritti di riproduzione, di memorizzazione elettronica e di adattamento totale o parziale con qualsiasi mezzo, compresi i microfilm e le copie fotostatiche sono
Le scaffalature di magazzino Marzo 2005 I diritti di riproduzione, di memorizzazione elettronica e di adattamento totale o parziale con qualsiasi mezzo, compresi i microfilm e le copie fotostatiche sono
CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO NELLA LOGISTICA INTERNA
 Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2012/13 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino
Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2012/13 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino
Il magazzino automatico CARTESIO per contenitori in plastica presenta un elevata densità di stoccaggio a fronte di una contenuta occupazione
 MAGAZZINI VERTICALI Il magazzino automatico CARTESIO per contenitori in plastica presenta un elevata densità di stoccaggio a fronte di una contenuta occupazione superficiale. Il sistema è dedicato all
MAGAZZINI VERTICALI Il magazzino automatico CARTESIO per contenitori in plastica presenta un elevata densità di stoccaggio a fronte di una contenuta occupazione superficiale. Il sistema è dedicato all
INDICE. Assessorato turismo, sport, commercio e trasporti Infrastrutture funiviarie
 INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici
 Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2010/11 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino
Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2010/11 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino
 GRU I tipi di macchine da cantiere più diffuse sono quelle per il sollevamento ed il trasporto dei carichi. I principali tipi di macchine per il sollevamento sono le gru che a seconda della loro strutturazione
GRU I tipi di macchine da cantiere più diffuse sono quelle per il sollevamento ed il trasporto dei carichi. I principali tipi di macchine per il sollevamento sono le gru che a seconda della loro strutturazione
Gruppo Tecnico Movimentazione Manuale Carichi nei Caseifici del Parmigiano-Reggiano / giugno 2004
 Scheda 4 - D) MATURAZIONE SALATOIO CAMERA CALDA PROBLEMA 1) TRAINO/SPINTA DEGLI SPERSOLI SU RUOTE O DEL CARRELLO DELLE FORME COMMENTO: la modalità, ormai, maggiormente in uso è quella degli spersoli su
Scheda 4 - D) MATURAZIONE SALATOIO CAMERA CALDA PROBLEMA 1) TRAINO/SPINTA DEGLI SPERSOLI SU RUOTE O DEL CARRELLO DELLE FORME COMMENTO: la modalità, ormai, maggiormente in uso è quella degli spersoli su
I MAGAZZINI INDUSTRIALI - Tipologie. I magazzini industriali si differenziano in:
 I MAGAZZINI INDUSTRIALI - Tipologie I magazzini industriali si differenziano in: Magazzini materie prime: Assicurano una riserva di materiali grezzi necessari alla attivi tà produttiva Magazzini semilavorati:
I MAGAZZINI INDUSTRIALI - Tipologie I magazzini industriali si differenziano in: Magazzini materie prime: Assicurano una riserva di materiali grezzi necessari alla attivi tà produttiva Magazzini semilavorati:
CASEhistory. 8.000 m 2. Una struttura autoportante di
 Denso Thermal Systems CASEhistory Una struttura autoportante di 8.000 m 2 ad elevata automazione In Denso Thermal Systems un progetto logistico ex novo fortemente automatizzato ha consentito al Gruppo
Denso Thermal Systems CASEhistory Una struttura autoportante di 8.000 m 2 ad elevata automazione In Denso Thermal Systems un progetto logistico ex novo fortemente automatizzato ha consentito al Gruppo
PR242012 23. aprile 2012 Motion Control Pagina 1 di 5. XTS extended Transport System: un nuovo modo di concepire il Motion Control
 Motion Control Pagina 1 di 5 XTS extended Transport System: un nuovo modo di concepire il Motion Control Il nuovo principio: motore lineare con moto circolare Il nuovo sistema di azionamento XTS (extended
Motion Control Pagina 1 di 5 XTS extended Transport System: un nuovo modo di concepire il Motion Control Il nuovo principio: motore lineare con moto circolare Il nuovo sistema di azionamento XTS (extended
Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici
 Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2012/13 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino
Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici Anno Accademico: 2012/13 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docente: Marino
[blockquote]carrello Laterale Multidirezionale Compatto [/blockquote] Portata nominale da 1500 a 3000 kg
![[blockquote]carrello Laterale Multidirezionale Compatto [/blockquote] Portata nominale da 1500 a 3000 kg](/thumbs/39/18400436.jpg "[blockquote]carrello Laterale Multidirezionale Compatto [/blockquote] Portata nominale da 1500 a 3000 kg") [blockquote]carrello Laterale Multidirezionale Compatto [/blockquote] Portata nominale da 1500 a 3000 kg [span class=note]caratteristiche[/span] La serie 2120 è un carrello laterale con sterzo multidirezionale,
[blockquote]carrello Laterale Multidirezionale Compatto [/blockquote] Portata nominale da 1500 a 3000 kg [span class=note]caratteristiche[/span] La serie 2120 è un carrello laterale con sterzo multidirezionale,
Prefabbricati a) con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate
 con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate") Prefabbricati a) con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate sul tetto. c) con tetto piano e lucernari a sezione triangolare trasversali. d)
Prefabbricati a) con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate sul tetto. c) con tetto piano e lucernari a sezione triangolare trasversali. d)
PARTE MECCANICA. Requisiti meccanici della struttura da movimentare
 PARTE MECCANICA Requisiti meccanici della struttura da movimentare Il costruttore dell anta scorrevole (cancello, portone, vetrata, lucernario, copertura, ecc.) deve attenersi ai seguenti requisiti: Peso
PARTE MECCANICA Requisiti meccanici della struttura da movimentare Il costruttore dell anta scorrevole (cancello, portone, vetrata, lucernario, copertura, ecc.) deve attenersi ai seguenti requisiti: Peso
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
2.1 La logistica integrata ed il sistema CIM 10
 Indice Prefazione alla 2 edizione Prefazione alla 1 edizione CAPITOLO 1 - GENERALITÀ 1.1 Definizione della funzione logistica 2 1.1.1 Integrazione ed automazione logistica 2 1.1.2 Flessibilità come risposta
Indice Prefazione alla 2 edizione Prefazione alla 1 edizione CAPITOLO 1 - GENERALITÀ 1.1 Definizione della funzione logistica 2 1.1.1 Integrazione ed automazione logistica 2 1.1.2 Flessibilità come risposta
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Parte 2: Istruzioni per il montaggio cl. 558
 Indice Pagina: Parte 2: Istruzioni per il montaggio cl. 558 1. Parti componenti della fornitura.................... 3 2. Montaggio................................. 4 2.1 Trasporto..................................
Indice Pagina: Parte 2: Istruzioni per il montaggio cl. 558 1. Parti componenti della fornitura.................... 3 2. Montaggio................................. 4 2.1 Trasporto..................................
SCHEDE TECNICHE PORTONI SEZIONALI INDUSTRIALI ED 01-10
 SCEDE TECNICE PORTONI SEZIONALI INDUSTRIALI ED 01-10 INDICE Schema componenti generale... Tipologie di scorrimento... ST/1 - Portone sezionale a scorrimento STANDARD... PV/2 - Portone sezionale a scorrimento
SCEDE TECNICE PORTONI SEZIONALI INDUSTRIALI ED 01-10 INDICE Schema componenti generale... Tipologie di scorrimento... ST/1 - Portone sezionale a scorrimento STANDARD... PV/2 - Portone sezionale a scorrimento
Campo d'impiego Struttura Cambio utensile/pallet Caratteristiche tecniche
 Campo d'impiego Struttura Cambio utensile/pallet Caratteristiche tecniche Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail:
Campo d'impiego Struttura Cambio utensile/pallet Caratteristiche tecniche Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail:
Esercitazione 5 Dinamica del punto materiale
 Problema 1 Un corpo puntiforme di massa m = 1.0 kg viene lanciato lungo la superficie di un cuneo avente un inclinazione θ = 40 rispetto all orizzontale e altezza h = 80 cm. Il corpo viene lanciato dal
Problema 1 Un corpo puntiforme di massa m = 1.0 kg viene lanciato lungo la superficie di un cuneo avente un inclinazione θ = 40 rispetto all orizzontale e altezza h = 80 cm. Il corpo viene lanciato dal
Dipartimento di Economia dell Università degli Studi di Parma Il magazzino
 dell Università degli Studi di Parma Il magazzino Gestione del magazzino La gestione operativa di un magazzino è strettamente legata al tipo di impianto ed alla sua organizzazione. Le principali attività
dell Università degli Studi di Parma Il magazzino Gestione del magazzino La gestione operativa di un magazzino è strettamente legata al tipo di impianto ed alla sua organizzazione. Le principali attività
CASE. history. 30.000 ordini/anno
 CASE SCHÖNHUBER history 30.000 ordini/anno per una rete di 3.200 clienti Schönhuber, leader nella distribuzione di articoli casalinghi, sceglie le soluzioni Ferretto Group: l automazione dell evasione
CASE SCHÖNHUBER history 30.000 ordini/anno per una rete di 3.200 clienti Schönhuber, leader nella distribuzione di articoli casalinghi, sceglie le soluzioni Ferretto Group: l automazione dell evasione
Accordo Stato Regioni 22/02/2012: Attrezzature da lavoro
 CARRELLI ELEVATORI Indice Accordo Stato Regioni 22/02/2012: Attrezzature da lavoro 2.1 Tipologie e caratteristiche 2.2 Rischi da carrelli semoventi 23N 2.3 Nozioni ielementari idi fisica i 2.4 Tecnologia
CARRELLI ELEVATORI Indice Accordo Stato Regioni 22/02/2012: Attrezzature da lavoro 2.1 Tipologie e caratteristiche 2.2 Rischi da carrelli semoventi 23N 2.3 Nozioni ielementari idi fisica i 2.4 Tecnologia
Semplice. Compatto. Efficace.
 Semplice. Compatto. Efficace. Abbiamo automatizzato un consolidato sistema di immagazzinamento... e ne abbiamo perfezionato l immagine! Il classico archivio per documenti. L idea è semplice: la maggiore
Semplice. Compatto. Efficace. Abbiamo automatizzato un consolidato sistema di immagazzinamento... e ne abbiamo perfezionato l immagine! Il classico archivio per documenti. L idea è semplice: la maggiore
STOCCAGGIO AUTOMATICO AUTOSTORE
 STOCCAGGIO AUTOMATICO I magazzini consentono lo stoccaggio automatico di unità di carico di ogni dimensione e peso. Le macchine sono progettate in diverse soluzioni per il massimo sfruttamento della volumetria
STOCCAGGIO AUTOMATICO I magazzini consentono lo stoccaggio automatico di unità di carico di ogni dimensione e peso. Le macchine sono progettate in diverse soluzioni per il massimo sfruttamento della volumetria
PRESTAZIONI efficienti Linde ECO Mode. Linde Material Handling
 PRESTAZIONI efficienti Linde ECO Mode Linde Material Handling Una delle maggiori aziende di veicoli al mondo: L unica domanda quale versione Vi Linde PERFORMANCE Mode. Garantisce al carrello la piena
PRESTAZIONI efficienti Linde ECO Mode Linde Material Handling Una delle maggiori aziende di veicoli al mondo: L unica domanda quale versione Vi Linde PERFORMANCE Mode. Garantisce al carrello la piena
ACCUMULATORI ACCUMULATORI ROTANTI NASTRI TRASPORTATORI. Apiel realizza accumulatori rotanti, orizzontali a tavolo e verticali.
 NASTRI TRASPORTATORI ACCUMULATORI Apiel realizza accumulatori rotanti, orizzontali a tavolo e verticali. ACCUMULATORI ROTANTI Questa tipologia di prodotto è utilizzato in uscita da linee di confezionamento
NASTRI TRASPORTATORI ACCUMULATORI Apiel realizza accumulatori rotanti, orizzontali a tavolo e verticali. ACCUMULATORI ROTANTI Questa tipologia di prodotto è utilizzato in uscita da linee di confezionamento
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
ALLEGATO n. 1 K PROGETTO DEFINITIVO. Sistema di stoccaggio ed alimentazione. rifiuti speciali Fax : 055 8323024. Page : 1/10. Numéro du document
 Page : 1/10 50069 Sieci Pontassieve (F) IMPIANTO I CIPRESSI DDC 5226 S 0022 A Sistema di stoccaggio ed alimentazione rifiuti speciali ALLEGATO n. 1 K Page : 2/10 50069 Sieci Pontassieve (F) IMPIANTO I
Page : 1/10 50069 Sieci Pontassieve (F) IMPIANTO I CIPRESSI DDC 5226 S 0022 A Sistema di stoccaggio ed alimentazione rifiuti speciali ALLEGATO n. 1 K Page : 2/10 50069 Sieci Pontassieve (F) IMPIANTO I
Nastri trasportatori GUF-P 2004
 Nastri trasportatori GUF-P 2004 Sezione trasversale della struttura del trasportatore Oltre alle funzioni standard di tutti i Sistemi per nastri trasportatori mk, inclusi i rulli bombati per un facile
Nastri trasportatori GUF-P 2004 Sezione trasversale della struttura del trasportatore Oltre alle funzioni standard di tutti i Sistemi per nastri trasportatori mk, inclusi i rulli bombati per un facile
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Simbologia pneumatica
 Simbologia pneumatica Fonte/Sorgente di pressione E l alimentazione/alimentatore di ogni circuito pneumatico. È generalmente costituito da un compressore che comprime l aria all interno di un serbatoio.
Simbologia pneumatica Fonte/Sorgente di pressione E l alimentazione/alimentatore di ogni circuito pneumatico. È generalmente costituito da un compressore che comprime l aria all interno di un serbatoio.
Università degli Studi di Trieste a.a. 2009-2010. Convogliatori. continuo sono anche definiti convogliatori. Sono qui compresi:
 Convogliatori I trasportatori di tipo fisso con moto spesso continuo sono anche definiti convogliatori. Sono qui compresi: trasportatori a rulli (motorizzati o non motorizzati); trasportatori a nastro;
Convogliatori I trasportatori di tipo fisso con moto spesso continuo sono anche definiti convogliatori. Sono qui compresi: trasportatori a rulli (motorizzati o non motorizzati); trasportatori a nastro;
TECNOLOGIA MECCANICA LE MACCHINE UTENSILI A CNC I Centri di Lavoro
 LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
Piattaforma. HINOWA SPA Via Fontana - 37054 NOGARA - VERONA (ITALY) Tel. +39 0442 539100 Fax +39 0442 88790 mbighellini@hinowa.it - www.hinowa.
 Tel. +39 0442 539100 Fax +39 0442 88790 mbighellini@hinowa.it - www.hinowa.") HINOWA SPA Via Fontana - 37054 NOGARA - VERONA (ITALY) Tel. +39 044 53900 Fax +39 044 88790 . CARATTERISTICHE PRINCIPALI E UNICHE. PESO La LightLift 47 è la più leggera piattaforma aeree della sua categoria.
HINOWA SPA Via Fontana - 37054 NOGARA - VERONA (ITALY) Tel. +39 044 53900 Fax +39 044 88790 . CARATTERISTICHE PRINCIPALI E UNICHE. PESO La LightLift 47 è la più leggera piattaforma aeree della sua categoria.
SOLO I CARRELLI TOYOTA CON SAS SANNO COME
 SOLO I CARRELLI TOYOTA CON SAS SANNO COME www.toyota-forklifts.it ABBATTERE I COSTI I carrelli elevatori Toyota equipaggiati con il sistema SAS utilizzano una tecnologia intelligente per ridurre sia i
SOLO I CARRELLI TOYOTA CON SAS SANNO COME www.toyota-forklifts.it ABBATTERE I COSTI I carrelli elevatori Toyota equipaggiati con il sistema SAS utilizzano una tecnologia intelligente per ridurre sia i
SPECIALISTI NELLA LOGISTICA DELLE GRANDI CUCINE SCAFFALATURA SU BINARI
 SPCLST NLL LGSTC DLL GND CUCN SCFFLTU SU BN ttimizzazione dello stoccaggio......concepito con un sistema intelligente! Massima ergonomia e sicurezza sono fornite dai cuscinetti a sfera che permettono lo
SPCLST NLL LGSTC DLL GND CUCN SCFFLTU SU BN ttimizzazione dello stoccaggio......concepito con un sistema intelligente! Massima ergonomia e sicurezza sono fornite dai cuscinetti a sfera che permettono lo
(Esercizi Tratti da Temi d esame degli ordinamenti precedenti)
") (Esercizi Tratti da Temi d esame degli ordinamenti precedenti) Esercizio 1 L'agenzia viaggi GV - Grandi Viaggi vi commissiona l'implementazione della funzione AssegnaVolo. Tale funzione riceve due liste
(Esercizi Tratti da Temi d esame degli ordinamenti precedenti) Esercizio 1 L'agenzia viaggi GV - Grandi Viaggi vi commissiona l'implementazione della funzione AssegnaVolo. Tale funzione riceve due liste
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
VILLA BORROMEO Sarmeola di Rubano Padova 25 novembre 2010. Relatore: Ing. Carlo Calisse
 LE RETI ANTICADUTA DALLE NORME UNI EN 1263-1 1 e 2 ALLE NUOVE LINEE GUIDA AIPAA VILLA BORROMEO Sarmeola di Rubano Padova 25 novembre 2010 Relatore: Ing. Carlo Calisse INTRODUZIONE ALLE NORME UNI EN 1263-1:
LE RETI ANTICADUTA DALLE NORME UNI EN 1263-1 1 e 2 ALLE NUOVE LINEE GUIDA AIPAA VILLA BORROMEO Sarmeola di Rubano Padova 25 novembre 2010 Relatore: Ing. Carlo Calisse INTRODUZIONE ALLE NORME UNI EN 1263-1:
ALESATRICE ORIZZONTALE Mod. 2B660
 ALESATRICE ORIZZONTALE Mod. 2B660 M.I.R.M.U. - Via Baldinucci, 40 20158 Milano - Tel 02.39320593 Fax 02.39322954 info @mirmu.it 1 La macchina utensile di tipo universale con un montante anteriore mobile
ALESATRICE ORIZZONTALE Mod. 2B660 M.I.R.M.U. - Via Baldinucci, 40 20158 Milano - Tel 02.39320593 Fax 02.39322954 info @mirmu.it 1 La macchina utensile di tipo universale con un montante anteriore mobile
Appunti sulla Macchina di Turing. Macchina di Turing
 Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
I NOSTRI OBIETTIVI. Massima produttività ed affidabilità di tutti i componenti.
 S u r f a c e A l u m i n i u m Te c h PACKAGING Dedicata espressamente alla progettazione e produzione di linee di imballaggio, totalmente automatizzate per profili di alluminio estruso, anodizzato e
S u r f a c e A l u m i n i u m Te c h PACKAGING Dedicata espressamente alla progettazione e produzione di linee di imballaggio, totalmente automatizzate per profili di alluminio estruso, anodizzato e
MASTER L EVOLUZIONE DEL MAGAZZINO VERTICALE AUTOMATICO
 MASTER L EVOLUZIONE DEL MAGAZZINO VERTICALE AUTOMATICO MASTER L EVOLUZIONE MASTER è l'evoluzione del magazzino automatico verticale a cassetti per la sua totale flessibilità di espansione con la aggiunta
MASTER L EVOLUZIONE DEL MAGAZZINO VERTICALE AUTOMATICO MASTER L EVOLUZIONE MASTER è l'evoluzione del magazzino automatico verticale a cassetti per la sua totale flessibilità di espansione con la aggiunta
ALL. 1 SPECIFICHE TECNICHE
 COMUNE DI PADOVA Settore Servizi Istituzionali e Affari Generali PROGETTO DI UN IMPIANTO DI ARMADI COMPATTABILI PER IL NUOVO ARCHIVIO GENERALE - COMPLESSO SARPI ALL. 1 SPECIFICHE TECNICHE IL CAPO SETTORE
COMUNE DI PADOVA Settore Servizi Istituzionali e Affari Generali PROGETTO DI UN IMPIANTO DI ARMADI COMPATTABILI PER IL NUOVO ARCHIVIO GENERALE - COMPLESSO SARPI ALL. 1 SPECIFICHE TECNICHE IL CAPO SETTORE
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
CARICATORE AUTOMATICO PER PROFILATI
 Caricatori barre AliPro6000 CARICATORE AUTOMATICO PER PROFILATI ESEMPI DI PROFILI GESTIBILI Asservimenti per troncatrici e presse Gestione di qualsiasi tipo di profilo garantendo l orientamento univoco
Caricatori barre AliPro6000 CARICATORE AUTOMATICO PER PROFILATI ESEMPI DI PROFILI GESTIBILI Asservimenti per troncatrici e presse Gestione di qualsiasi tipo di profilo garantendo l orientamento univoco
Requisiti di sicurezza per i dispositivi di protezione immateriali presenti sulle presse (barriere fotoelettriche)
") Requisiti di sicurezza per i dispositivi di protezione immateriali presenti sulle presse (barriere fotoelettriche) Fig. 1 Lavoro manuale su una pressa con barriera fotoelettrica e riparo fisso laterale.
Requisiti di sicurezza per i dispositivi di protezione immateriali presenti sulle presse (barriere fotoelettriche) Fig. 1 Lavoro manuale su una pressa con barriera fotoelettrica e riparo fisso laterale.
PALLETTIZZAZATORI CARTESIANI APERTI
 PALLETTIZZAZATORI CARTESIANI APERTI Il pallettizzatore cartesiano aperto è un robot cartesiano serie CC a 3/4 assi con un asse a terra che può arrivare a 10 metri di corsa, per pallettizzare fino a 7 posti
PALLETTIZZAZATORI CARTESIANI APERTI Il pallettizzatore cartesiano aperto è un robot cartesiano serie CC a 3/4 assi con un asse a terra che può arrivare a 10 metri di corsa, per pallettizzare fino a 7 posti
5.1 DATI TECNICI 5.1.1 INGOMBRI STANDARD IMPORTANTE. MISURE DI INGOMBRO CON BENNA STANDARD L 1260 E PNEUMATICI (27x8.50-15) DATI TECNICI
 DATI TECNICI") DATI TECNICI 5.1 DATI TECNICI 5.1.1 INGOMBRI STANDARD IMPORTANTE q Il peso della macchina aumenta di 200 kg quando è allestita con ruote non pneumatiche. q Se la benna è munita di denti la lunghezza della
DATI TECNICI 5.1 DATI TECNICI 5.1.1 INGOMBRI STANDARD IMPORTANTE q Il peso della macchina aumenta di 200 kg quando è allestita con ruote non pneumatiche. q Se la benna è munita di denti la lunghezza della
MODULO MAGAZZINO ARCHIVI DI MAGAZZINO ANAGRAFICA ARTICOLI
 MODULO MAGAZZINO ARCHIVI DI MAGAZZINO ANAGRAFICA ARTICOLI L anagrafica prodotti è suddivisa per sezioni: - Dati generici - Dati relativi al trasporto in A.D.R. (merci pericolose) - Dati relativi alla composizione
MODULO MAGAZZINO ARCHIVI DI MAGAZZINO ANAGRAFICA ARTICOLI L anagrafica prodotti è suddivisa per sezioni: - Dati generici - Dati relativi al trasporto in A.D.R. (merci pericolose) - Dati relativi alla composizione
Prestazioni di un magazzino. Magazzini. 4. - Magazzini Schema a blocchi. per semilavorati interoperazionale. per materie prime terminale
 LOGISTICA INDUSTRIALE 1 a.a. 2002/03 4. - Magazzini Schema a blocchi Un magazzino (grande/piccolo) può essere rappresentato da un sistema a blocchi 3 Magazzini per materie prime terminale per semilavorati
LOGISTICA INDUSTRIALE 1 a.a. 2002/03 4. - Magazzini Schema a blocchi Un magazzino (grande/piccolo) può essere rappresentato da un sistema a blocchi 3 Magazzini per materie prime terminale per semilavorati
Gli efficienti. Carrelli elevatori. per picking. Portata da 0,5 a 12 t. Carrello elevatore multidirezionale elettrico per picking
 Gli efficienti Portata da 0,5 a 12 t Carrello elevatore multidirezionale elettrico per picking Carrello elevatore multidirezionale con piattaforma rimovibile per picking Carrello elevatore multidirezionale
Gli efficienti Portata da 0,5 a 12 t Carrello elevatore multidirezionale elettrico per picking Carrello elevatore multidirezionale con piattaforma rimovibile per picking Carrello elevatore multidirezionale
Ministero dell Istruzione dell Università e della Ricerca
 Ministero dell Istruzione dell Università e della Ricerca ESAME DI STATO DI ISTRUZIONE SECONDARIA SUPERIORE Indirizzo: ITLG TRASPORTI E LOGISTICA ARTICOLAZIONE LOGISTICA Tema di: LOGISTICA ESEMPIO PROVA
Ministero dell Istruzione dell Università e della Ricerca ESAME DI STATO DI ISTRUZIONE SECONDARIA SUPERIORE Indirizzo: ITLG TRASPORTI E LOGISTICA ARTICOLAZIONE LOGISTICA Tema di: LOGISTICA ESEMPIO PROVA
Prefabbricati a) con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate
 con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate") Prefabbricati a) con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate sul tetto. c) con tetto piano e lucernari a sezione triangolare trasversali. d)
Prefabbricati a) con tetto a falde e serramenti a nastro sulle pareti perimetrali. b) con tetto a falde e fasce finestrate sul tetto. c) con tetto piano e lucernari a sezione triangolare trasversali. d)
reggiatrici a banco semiautomatiche
 reggiatrici a banco semiautomatiche Queste macchine semplificano e diminuiscono notevolmente i tempi di lavoro. Sono adatte alla reggiatura d imballi di qualsiasi dimensione, irregolari e di forma cilindrica.
reggiatrici a banco semiautomatiche Queste macchine semplificano e diminuiscono notevolmente i tempi di lavoro. Sono adatte alla reggiatura d imballi di qualsiasi dimensione, irregolari e di forma cilindrica.
Informatica - A.A. 2010/11
 Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
Ripasso lezione precedente Facoltà di Medicina Veterinaria Corso di laurea in Tutela e benessere animale Corso Integrato: Matematica, Statistica e Informatica Modulo: Informatica Esercizio: Convertire
ComfortControl 01 BLOCCO DELL INCLINAZIONE 02 TENSIONE DELL INCLINAZIONE 05 ALTEZZA DELLA SCHIENA 06 ANGOLO DELLO SCHIENALE 03 PROFONDITÀ DEL SEDILE
 Passo 1: Sbloccate la vostra sedia. 01 BLOCCO DELL INCLINAZIONE Passo 2: Adattate la sedia al vostro corpo. 02 TENSIONE DELL INCLINAZIONE 03 PROFONDITÀ DEL SEDILE 04 ALTEZZA DEL SEDILE Passo 3: Adattate
Passo 1: Sbloccate la vostra sedia. 01 BLOCCO DELL INCLINAZIONE Passo 2: Adattate la sedia al vostro corpo. 02 TENSIONE DELL INCLINAZIONE 03 PROFONDITÀ DEL SEDILE 04 ALTEZZA DEL SEDILE Passo 3: Adattate
EasyLoad. EasyLoad RACCOLTA APPLICAZIONI. Sistemi di Asservimento per CMM SISTEMI MANUALI SISTEMI AUTOMATICI. www.moden.it SU CMM A PORTALE
 Sistemi di Asservimento per CMM EasyLoad SISTEMI MANUALI PER CONTROLLI DI LABORATORIO SU CMM A PORTALE SISTEMI AUTOMATICI PER CONTROLLI IN LINEA SU ROBOT DI MISURA www.moden.it SISTEMA DI CARICO-SCARICO
Sistemi di Asservimento per CMM EasyLoad SISTEMI MANUALI PER CONTROLLI DI LABORATORIO SU CMM A PORTALE SISTEMI AUTOMATICI PER CONTROLLI IN LINEA SU ROBOT DI MISURA www.moden.it SISTEMA DI CARICO-SCARICO
TRONCATRICE DOPPIA TESTA ELETTRONICA 600 TSE
 TRONCATRICE DOPPIA TESTA ELETTRONICA 600 TSE 600 TSE/TSP - 550 TSE/TSP Troncatrice doppia testa elettronica Troncatrice doppia testa a 3 assi controllati per alluminio, PVC e leghe leggere, ideale per
TRONCATRICE DOPPIA TESTA ELETTRONICA 600 TSE 600 TSE/TSP - 550 TSE/TSP Troncatrice doppia testa elettronica Troncatrice doppia testa a 3 assi controllati per alluminio, PVC e leghe leggere, ideale per
APPENDICE 1 DISPOSITIVI OBBLIGATORI DISPOSITIVI FACOLTATIVI
 APPENDICE 1 M O T O C I C L I A - Luce posizione anteriore; B - Luce posizione posteriore; D - Luce targa; E - Proiettore; G - Luce di arresto; O - Catadiottro rosso. I - Proiettore fendinebbia Tutti i
APPENDICE 1 M O T O C I C L I A - Luce posizione anteriore; B - Luce posizione posteriore; D - Luce targa; E - Proiettore; G - Luce di arresto; O - Catadiottro rosso. I - Proiettore fendinebbia Tutti i
Campo d'impiego Struttura Cambio utensile/pallet Caratteristiche tecniche
 Campo d'impiego Struttura Cambio utensile/pallet Caratteristiche tecniche Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail:
Campo d'impiego Struttura Cambio utensile/pallet Caratteristiche tecniche Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail:
TECHNICALINFO. I magazzini LEITNER
 TECHNICALINFO I magazzini LEITNER I magazzini LEITNER Soluzioni per ogni esigenza Il rimessaggio dei veicoli richiede una grande fl essibilità, variabilità ed adattabilità. LEITNER offre una vasta gamma
TECHNICALINFO I magazzini LEITNER I magazzini LEITNER Soluzioni per ogni esigenza Il rimessaggio dei veicoli richiede una grande fl essibilità, variabilità ed adattabilità. LEITNER offre una vasta gamma
Regole della mano destra.
 Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
CORRENTE E TENSIONE ELETTRICA LA CORRENTE ELETTRICA
 CORRENTE E TENSIONE ELETTRICA La conoscenza delle grandezze elettriche fondamentali (corrente e tensione) è indispensabile per definire lo stato di un circuito elettrico. LA CORRENTE ELETTRICA DEFINIZIONE:
CORRENTE E TENSIONE ELETTRICA La conoscenza delle grandezze elettriche fondamentali (corrente e tensione) è indispensabile per definire lo stato di un circuito elettrico. LA CORRENTE ELETTRICA DEFINIZIONE:
Gestione dei Processi Logistico-Produttivi SISTEMI DI PICKING. Prof. Fabrizio Dallari. Ricercatore C-log Università C.
 Gestione dei Processi Logistico-Produttivi SISTEMI DI PICKING Prof. Fabrizio Dallari Ricercatore C-log Università C. Cattaneo LIUC Centro di Ricerca sulla Logistica AGENDA Panoramica delle soluzioni di
Gestione dei Processi Logistico-Produttivi SISTEMI DI PICKING Prof. Fabrizio Dallari Ricercatore C-log Università C. Cattaneo LIUC Centro di Ricerca sulla Logistica AGENDA Panoramica delle soluzioni di
RISPARMIATE PIU DEL 50% NEI COSTI DI LOGISTICA FERROVIARIA
 40 ANNI SUL MERCATO! RISPARMIATE PIU DEL 50% NEI COSTI DI LOGISTICA FERROVIARIA LOCOTRATTORI STRADA-ROTAIA ZEPHIR, MODERNI ED EFFICIENTI PER OPERARE NEI PIAZZALI DI MOVIMENTAZIONE FERROVIARIA TECNOLOGIA
40 ANNI SUL MERCATO! RISPARMIATE PIU DEL 50% NEI COSTI DI LOGISTICA FERROVIARIA LOCOTRATTORI STRADA-ROTAIA ZEPHIR, MODERNI ED EFFICIENTI PER OPERARE NEI PIAZZALI DI MOVIMENTAZIONE FERROVIARIA TECNOLOGIA
Il carrello saliscale per i professionisti. I problemi di trasporto su scale risolti in modo intelligente. www.aat-online.de
 Il carrello saliscale per i professionisti C I problemi di trasporto su scale risolti in modo intelligente www.aat-online.de Il superamento delle scale è cosa difficile e faticosa quando si tratta di movimentare
Il carrello saliscale per i professionisti C I problemi di trasporto su scale risolti in modo intelligente www.aat-online.de Il superamento delle scale è cosa difficile e faticosa quando si tratta di movimentare
Trasportatore con cinghia dentata mk
 Trasportatore con cinghia dentata mk Tecnologia del trasportatore mk 150 Indice Trasportatore con cinghia dentata mk ZRF-P 2010 152 ZRF-P 2040.02 164 ZRF-P Proprietà delle cinghie dentate 171 Esempi di
Trasportatore con cinghia dentata mk Tecnologia del trasportatore mk 150 Indice Trasportatore con cinghia dentata mk ZRF-P 2010 152 ZRF-P 2040.02 164 ZRF-P Proprietà delle cinghie dentate 171 Esempi di
CIRCUITI OLEODINAMICI ELEMENTARI
 CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
CIRCUITI OLEODINAMICI ELEMENTARI Un esame sistematico dei circuiti completi, anche se limitato a pochi tipi di macchine e di attrezzature, sarebbe estremamente complesso e vasto. Il raggiungimento del
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Tramev S.r.l. dal 1977 produce dispositivi di supporto, rotazione e movimentazioni per matasse e aspi per vergella, trafilato e pelato.
 Tramev S.r.l. dal 1977 produce dispositivi di supporto, rotazione e movimentazioni per matasse e aspi per vergella, trafilato e pelato. Con anni di esperienza nel campo delle trafilerie, bullonerie, corderie
Tramev S.r.l. dal 1977 produce dispositivi di supporto, rotazione e movimentazioni per matasse e aspi per vergella, trafilato e pelato. Con anni di esperienza nel campo delle trafilerie, bullonerie, corderie
ECONET S CONFORME ALLE NORMATIVE EUROPEE EN 1263-1 E EN
 Scheda tecnica e manuale di montaggio RETE DI SICUREZZA ECONET S CONFORME ALLE NORMATIVE EUROPEE EN 1263-1 E EN 1263-2 1 CARATTERISTICHE TECNICHE MATERIALE: POLIPROPILENE, stabilizzato ai raggi UV. COLORE:
Scheda tecnica e manuale di montaggio RETE DI SICUREZZA ECONET S CONFORME ALLE NORMATIVE EUROPEE EN 1263-1 E EN 1263-2 1 CARATTERISTICHE TECNICHE MATERIALE: POLIPROPILENE, stabilizzato ai raggi UV. COLORE:
M A C C H I N E P E R L A P U L I Z I A I N D U S T R I A L E E U R B A N A
 5000-200 HYDRO Il concetto Le lavastrade Dulevo 200 e 5000 Hydro sono state progettate per la pulizia ad alta pressione e la sanificazione delle aree urbane, ma si adattano senza problemi anche ad aree
5000-200 HYDRO Il concetto Le lavastrade Dulevo 200 e 5000 Hydro sono state progettate per la pulizia ad alta pressione e la sanificazione delle aree urbane, ma si adattano senza problemi anche ad aree
Convertitori elettronici di potenza per i veicoli elettrici
 Trazione elettrica veicolare: stato dell arte ed evoluzioni future Convertitori elettronici di potenza per i veicoli elettrici Veicoli elettrici L aumento crescente del costo del combustibile e il problema
Trazione elettrica veicolare: stato dell arte ed evoluzioni future Convertitori elettronici di potenza per i veicoli elettrici Veicoli elettrici L aumento crescente del costo del combustibile e il problema
Il magazzino verticale automatico
 I System Logistics Production Il magazzino verticale automatico Modula, nuova La nuova versione di MODULA attualizza le sue prestazioni, offrendo importanti vantaggi Il primo magazzino verticale a cassetti
I System Logistics Production Il magazzino verticale automatico Modula, nuova La nuova versione di MODULA attualizza le sue prestazioni, offrendo importanti vantaggi Il primo magazzino verticale a cassetti
PALLETTIZZAZATORI E FINE LINEA
 PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse