PROF. RAFFAELE IERVOLINO
|
|
|
- Gina Crippa
- 9 anni fa
- Просмотров:
Транскрипт
1 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del Corso di Laurea in Ingegneria Meccanica per la Progettazione e la Produzione (Laurea Magistrale) a.a. 2013/14
 per gli allievi del Corso di Laurea in Ingegneria Meccanica per la")
2 Esercitazione 1 Modellazione, simulazione e controllo di un robot antropomorfo Strumenti SW e/o HW occorrenti: SW SolidWorks SW Matlab/Simulink, libreria SimMechanics Fig. 1: Robot antropomorfo a 6 assi. Fig. 2: Configurazione gomito basso - braccio concorde. Fig. 3: Configurazione gomito alto braccio concorde.

3 Fig. 4: Traiettorie tracciate a spirale con diversi tempi di esecuzione. Fig. 5: Traiettorie tracciate a cardiode con diversi tempi di esecuzione.

4 Esercitazione 2 Modellistica, simulazione e controllo di una turbina eolica Strumenti SW e/o HW occorrenti: SW SolidWorks SW Matlab/Simulink, libreria SimMechanics Fig. 6: Viste turbina eolica. Fig. 7: Rotore ed attuatori di pitch.

5 Fig. 8: Velocità del rotore (rpm). Fig. 9: Angolo di pitch delle pale imposto e misurato.

6 Esercitazione 3 Modellazione e simulazione di un sistema di propulsione ibrido elettrico per l autotrazione Strumenti SW e/o HW occorrenti: SW Matlab/Simulink Fig. 10: Configurazione ibrido serie. Fig. 11: Ciclo urbano.

7 Fig. 12: Ciclo extra-urbano. Fig. 13: Esempio di utilizzo del Kers.

8 Esercitazione 4 Modello dinamica di un veicolo per sistemi A.D.A.S. (Advanced Driver Assistance Systems) Strumenti SW e/o HW occorrenti: SW Matlab/Simulink Fig. 14: Schema Simulink dinamica veicolo per ADAS. Fig. 15: Accelerazione sperimentale rilevata del veicolo target.

9 Fig. 16: Errore di inseguimento. Fig. 17: Grado di ammissione.

10 Esercitazione 5 Validazione del progetto delle sospensioni di una vettura di Formula SAE Strumenti SW e/o HW occorrenti: SW SolidWorks SW Matlab/Simulink, libreria SimMechanics Fig. 18: Sospensioni a quadrilatero per l anteriore (destra) ed il posteriore (sinistra). Fig. 19: Modello CAD sospensioni a quadrilatero all anteriore (destra) ed al posteriore (sinistra).
 ed al posteriore")
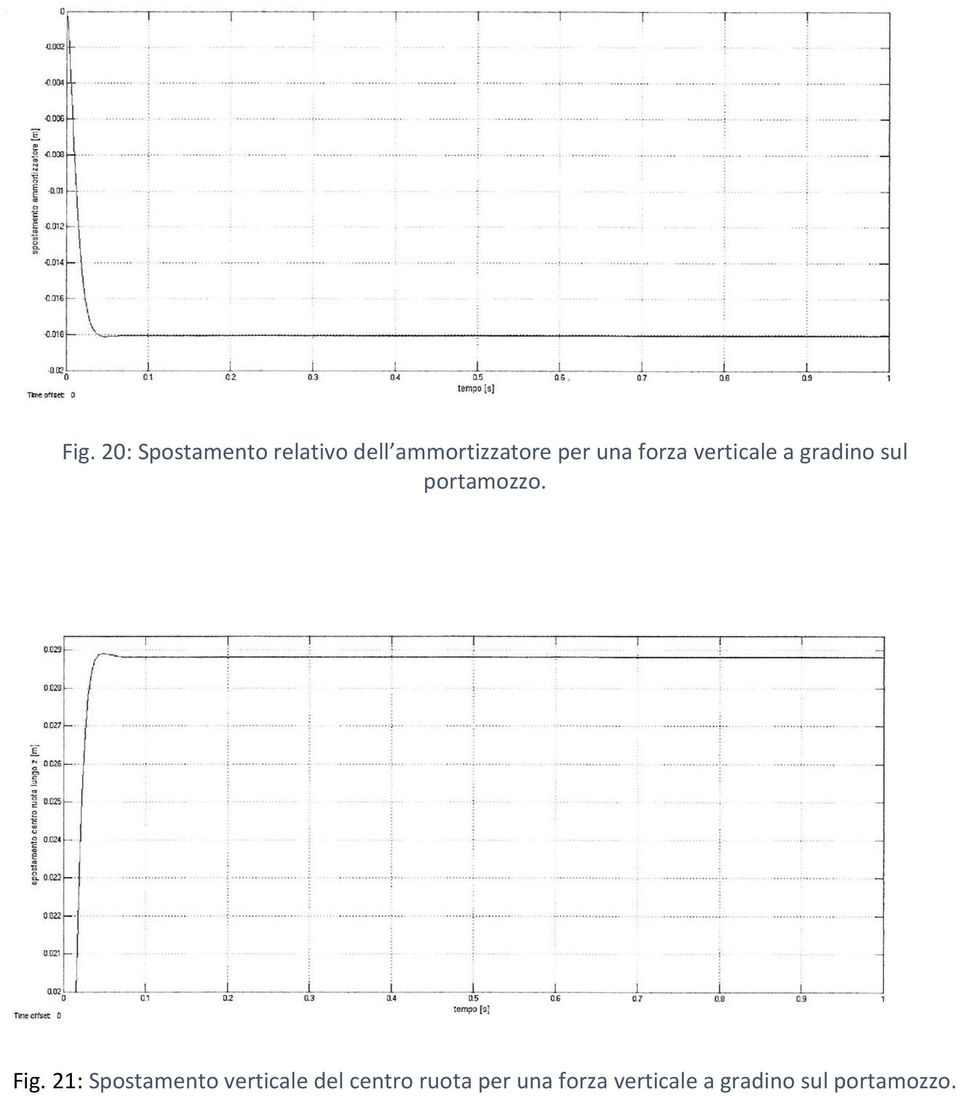
11 Fig. 20: Spostamento relativo dell ammortizzatore per una forza verticale a gradino sul portamozzo. Fig. 21: Spostamento verticale del centro ruota per una forza verticale a gradino sul portamozzo.
12 Esercitazione 6 Calcolo del momento motore del propulsore ULM220 mediante simulazione Strumenti SW e/o HW occorrenti: SW SolidWorks SW Matlab/Simulink, libreria SimMechanics Fig. 22: Il motore ULM220. Fig. 23: Modello CAD del motore ULM220.

13 Fig. 24: Ciclo indicato del motore ULM220. Fig. 25: Spostamento e forzante (in scala) relativi al pistone 1.
 relativi al")
14 Fig. 26: Momento motore relativo ad un cilindro. Fig. 27: Momento motore totale.

15 Esercitazione 7 Simulazione della dinamica di un autoveicolo Strumenti SW e/o HW occorrenti: SW Matlab/Simulink Fig. 28: Schema di veicolo a 3 gradi di libertà. Fig. 29: Interazione pneumatico-strada.

16 Fig. 30: Animazione auto in curva con perdita di aderenza alle ruote posteriori (sbandamento). Fig. 31: Manovra di steering pad (angolo di sterzo e velocità costanti).

17 Esercitazione 8 Controllo automatico dell illuminazione di un ambiente chiuso Strumenti SW e/o HW occorrenti: SW Matlab/Simulink Arduino Mega 2560 Resistori Fotoresistore Servomotore Ambiente chiuso Fig. 32: Ambiente utilizzato per le prove.

18 Fig. 34: Interno. Fig. 33: Vista dall alto. Fig. 35: Arduino Mega 2560.

19 Fig. 36: Luminosità misurata all interno dell ambiente (segnale non filtrato). Fig. 37: Luminosità misurata all interno dell ambiente (segnale filtrato).

20 Esercitazione 9 Controllo automatico della temperatura di un ambiente chiuso Strumenti SW e/o HW occorrenti: SW Matlab/Simulink Arduino Mega 2560 Saldatore Ventola per PC Sensore di temperatura Resistori, relè, diodi, transistor Ambiente chiuso Fig. 38: Ambiente utilizzato per le prove.

21 Fig. 39: Schema collegamenti Arduino al sensore di temperatura ed al relè. Fig. 40: Confronto temperatura ambiente misurata (filtrata) e calcolata con il modello identificato (sopra); andamento della derivata temporale della temperatura (sotto).
22 Fig. 41: Temperatura misurata dal sensore (segnale non filtrato). Fig. 42: Andamento temperatura controllata dell ambiente.
23 Esercitazione 10 Modellazione, simulazione, controllo e realizzazione di un robot SCARA Strumenti SW e/o HW occorrenti: SW SolidWorks SW Matlab/Simulink, libreria SimMechanics Arduino Uno Mattoncini Lego Technic Servomotori Fig. 43: Realizzazione del robot SCARA con componenti LEGO e controllo con ARDUINO.
24 Fig. 44: Particolare dell organo terminale del robot SCARA (giunto traslazionale). Fig. 45: Schema collegamenti dei servomotori ad Arduino.
SIMULAZIONE DELL AMMORTIZZATORE DEL CARRELLO DI ATTERRAGGIO DEL MACCHI 205 V
 Università degli studi di Bologna FACOLTÀ DI INGEGNERIA Corso di laurea in Ingegneria Meccanica Disegno Tecnico Industriale SIMULAZIONE DELL AMMORTIZZATORE DEL CARRELLO DI ATTERRAGGIO DEL MACCHI 205 V
Università degli studi di Bologna FACOLTÀ DI INGEGNERIA Corso di laurea in Ingegneria Meccanica Disegno Tecnico Industriale SIMULAZIONE DELL AMMORTIZZATORE DEL CARRELLO DI ATTERRAGGIO DEL MACCHI 205 V
ANALISI CINEMATICA DELLE SOSPENSIONI DI UNA VETTURA DA COMPETIZIONE
 UNIVERSITÀ DI PISA FACOLTÀ DI INGEGNERIA RELAZIONE PER IL CONSEGUIMENTO DEL DIPLOMA DI LAUREA IN INGEGNERIA MECCANICA ANALISI CINEMATICA DELLE SOSPENSIONI DI UNA VETTURA DA COMPETIZIONE MASERATI CORSE
UNIVERSITÀ DI PISA FACOLTÀ DI INGEGNERIA RELAZIONE PER IL CONSEGUIMENTO DEL DIPLOMA DI LAUREA IN INGEGNERIA MECCANICA ANALISI CINEMATICA DELLE SOSPENSIONI DI UNA VETTURA DA COMPETIZIONE MASERATI CORSE
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
Progetto e sviluppo di un banco HIL per sistemi automobilistici di controllo attivo del rollio
 Progetto e sviluppo di un banco HIL per sistemi automobilistici di controllo del rollio Relatori: Prof. Nicolò D Alfio Prof. Mauro Velardocchia Candidati: Alessandro Fassio Roberto Fassio PAROLE CHIAVE:
Progetto e sviluppo di un banco HIL per sistemi automobilistici di controllo del rollio Relatori: Prof. Nicolò D Alfio Prof. Mauro Velardocchia Candidati: Alessandro Fassio Roberto Fassio PAROLE CHIAVE:
FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica Tesi di laurea in Laboratorio CAD
 Università degli studi di Bologna FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica Tesi di laurea in Laboratorio CAD OTTIMIZZAZIONE DEL SISTEMA DI MOTORIZZAZIONE E TRASMISSIONE DELLA AUTOVETTURA
Università degli studi di Bologna FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica Tesi di laurea in Laboratorio CAD OTTIMIZZAZIONE DEL SISTEMA DI MOTORIZZAZIONE E TRASMISSIONE DELLA AUTOVETTURA
MXL Pro PROVE SU PISTA ANALISI SOVRASTERZO E SOTTOSTERZO. Vettura: Sport ANALISI IN PISTA
 PROVE SU PISTA Sistema: MXL Pro + GPS Pista: Adria (RO) Vettura: Sport ANALISI IN PISTA Premessa Per le prove effettuate sono stati installati i seguenti sensori: GPS, 4 potenziometri ammortizzatori, potenziometro
PROVE SU PISTA Sistema: MXL Pro + GPS Pista: Adria (RO) Vettura: Sport ANALISI IN PISTA Premessa Per le prove effettuate sono stati installati i seguenti sensori: GPS, 4 potenziometri ammortizzatori, potenziometro
Fondamenti di Automatica
 Fondamenti di Automatica Prof. Giancarlo Ferrari Trecate Dipartimento di Ingegneria Industriale e dell Informazione Università degli Studi di Pavia [email protected] Informazioni utili Due classi
Fondamenti di Automatica Prof. Giancarlo Ferrari Trecate Dipartimento di Ingegneria Industriale e dell Informazione Università degli Studi di Pavia [email protected] Informazioni utili Due classi
PAS _ A020_UNIPD_2015. Didattica delle tecnologie meccaniche di processo e di prodotto. Professore Domenico Fernando Antonucci
 PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di prodotto. Professore Domenico Fernando Antonucci PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di
PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di prodotto. Professore Domenico Fernando Antonucci PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di
STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
 Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Studio della dinamica di scooter innovativi
 Università degli Studi di Pisa Corso di Dottorato di Ricerca in Veicoli Terrestri e Sistemi di Trasporto Allievo: Francesco Bartaloni Studio della dinamica di scooter innovativi Sintesi della tesi Tutori:
Università degli Studi di Pisa Corso di Dottorato di Ricerca in Veicoli Terrestri e Sistemi di Trasporto Allievo: Francesco Bartaloni Studio della dinamica di scooter innovativi Sintesi della tesi Tutori:
Controlli Automatici L
 Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: [email protected] URL: www-lar.deis.unibo.it/~crossi Introduzione -
Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: [email protected] URL: www-lar.deis.unibo.it/~crossi Introduzione -
e-golf Posizioni di montaggio N. 804 / 1 Edizione
 Page 1 of 26 e-golf Posizioni di montaggio N. 804 / 1 Edizione 05.2015 Centraline nella parte anteriore del veicolo Panoramica delle centraline 1 - Centralina per il riscaldamento ad alto voltaggio (PTC)
Page 1 of 26 e-golf Posizioni di montaggio N. 804 / 1 Edizione 05.2015 Centraline nella parte anteriore del veicolo Panoramica delle centraline 1 - Centralina per il riscaldamento ad alto voltaggio (PTC)
viii Indice 1.10 Ruota con solo scorrimento rotatorioϕ(camber e/o imbardata) Spinta di camber (comportamento lineare) El
 Spinta di camber (comportamento lineare) El") Indice Prefazione xiii 1 Comportamento della ruota con pneumatico 1 1.1 Sistema di riferimento e azioni ruota-strada............. 2 1.2 Moto della ruota con pneumatico rispetto alla strada....... 5 1.2.1
Indice Prefazione xiii 1 Comportamento della ruota con pneumatico 1 1.1 Sistema di riferimento e azioni ruota-strada............. 2 1.2 Moto della ruota con pneumatico rispetto alla strada....... 5 1.2.1
CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE
 51 CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE In questo capitolo vengono presentate le prove sperimentali per l identificazione della coppia dovuta
51 CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE In questo capitolo vengono presentate le prove sperimentali per l identificazione della coppia dovuta
A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E.
 A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Caratteristiche
A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Caratteristiche
Fondamenti (Principi) di Controlli Automatici
 di Controlli Automatici") Fondamenti (Principi) di Controlli Automatici Docente: Ing. Gianluca Palli DEIS - Dipartimento di Elettronica, Informatica e Sistemistica LAR - Laboratorio di Automazione e Robotica Università di Bologna
Fondamenti (Principi) di Controlli Automatici Docente: Ing. Gianluca Palli DEIS - Dipartimento di Elettronica, Informatica e Sistemistica LAR - Laboratorio di Automazione e Robotica Università di Bologna
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms
 Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
DATI TECNICI ŠKODA SUPERB MOTORI BENZINA
 DATI TECNICI ŠKODA SUPERB MOTORI BENZINA Dati tecnici 1.4 TSI/92 kw 2,0 TSI/147 kw (A) Motore motorizzazione benzina con turbocompressore, in linea, sistema di Tipo di motorizzazione raffreddamento ad
DATI TECNICI ŠKODA SUPERB MOTORI BENZINA Dati tecnici 1.4 TSI/92 kw 2,0 TSI/147 kw (A) Motore motorizzazione benzina con turbocompressore, in linea, sistema di Tipo di motorizzazione raffreddamento ad
Corso Propulsione Elettrica Laurea Magistrale Ingegneria Meccanica Anno Accademico
 Corso Propulsione Elettrica Laurea Magistrale Ingegneria Meccanica Anno Accademico 2013-2014 Contenuti del Corso 1. Generalità sui sistemi di propulsione Contenuti del Corso : Classificazione sistemi di
Corso Propulsione Elettrica Laurea Magistrale Ingegneria Meccanica Anno Accademico 2013-2014 Contenuti del Corso 1. Generalità sui sistemi di propulsione Contenuti del Corso : Classificazione sistemi di
INGEGNERIA dell AUTOMAZIONE a Padova
 INGEGNERIA dell AUTOMAZIONE a Padova 1 Struttura dei corsi di laurea nel settore 1 Primo anno comune 2 3 INGEGNERIA DELL INFORMAZIONE ELET -prof IFprof BIOprof 4 * 5 * AUT ELET IF TLC BIO Attenzione!!!
INGEGNERIA dell AUTOMAZIONE a Padova 1 Struttura dei corsi di laurea nel settore 1 Primo anno comune 2 3 INGEGNERIA DELL INFORMAZIONE ELET -prof IFprof BIOprof 4 * 5 * AUT ELET IF TLC BIO Attenzione!!!
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Dinamica verticale del veicolo stradale
 Corso di laurea Magistrale in Ingegneria Meccanica Tesi di laurea in Meccanica del Veicolo Dinamica verticale del veicolo stradale Relatori: Prof. Ing. Arcangelo Messina Ing. Giulio Reina Laureando: Antonio
Corso di laurea Magistrale in Ingegneria Meccanica Tesi di laurea in Meccanica del Veicolo Dinamica verticale del veicolo stradale Relatori: Prof. Ing. Arcangelo Messina Ing. Giulio Reina Laureando: Antonio
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
4550mm. Ingombri in mm Diametro spazzole 850 Larghezza senza spazzole Altezza con lampeggiatore ottico Interasse 1.800
 16 DATI TECNICI 16.1 In generale 2000mm 1985mm 1053mm 1300mm 4550mm 1800mm 1053mm Ingombri in mm Diametro spazzole 850 Larghezza senza spazzole 1.300 Altezza con lampeggiatore ottico 2.270 Interasse 1.800
16 DATI TECNICI 16.1 In generale 2000mm 1985mm 1053mm 1300mm 4550mm 1800mm 1053mm Ingombri in mm Diametro spazzole 850 Larghezza senza spazzole 1.300 Altezza con lampeggiatore ottico 2.270 Interasse 1.800
Tabella 1 a - Corsi di Studio di Ingegneria con sede a Forlì
 Tabella 1 a - Corsi di Studio di Ingegneria con sede a Forlì Descrizione materia Descizione integrato Sdopp. Modulo Ssd aerodinamica degli aeromobili 2 modulo 2 ING-IND/06 3.0 1 30 8263 INGEGNERIA AEROSPAZIALE
Tabella 1 a - Corsi di Studio di Ingegneria con sede a Forlì Descrizione materia Descizione integrato Sdopp. Modulo Ssd aerodinamica degli aeromobili 2 modulo 2 ING-IND/06 3.0 1 30 8263 INGEGNERIA AEROSPAZIALE
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca [email protected] Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca [email protected] Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Controlli Automatici. Maria Gabriella Xibilia Blocco B piano 7 Tel. 7328
 Controlli Automatici Maria Gabriella Xibilia Blocco B piano 7 Tel. 7328 Libri di testo Bolzern, Scattolini, Schiavone Fondamenti di controlli automatici Mc-Graw Hill III edizione Isidori Sistemi di Controllo
Controlli Automatici Maria Gabriella Xibilia Blocco B piano 7 Tel. 7328 Libri di testo Bolzern, Scattolini, Schiavone Fondamenti di controlli automatici Mc-Graw Hill III edizione Isidori Sistemi di Controllo
CONCORSO PER IDEE PROGETTUALI FISICA IN MOTO
 CONCORSO PER IDEE PROGETTUALI FISICA IN MOTO Progetto di macchinari didattici interattivi Simulatore del momento giroscopico del motoveicolo con perdita di aderenza sulla ruota posteriore 1 Partecipante:
CONCORSO PER IDEE PROGETTUALI FISICA IN MOTO Progetto di macchinari didattici interattivi Simulatore del momento giroscopico del motoveicolo con perdita di aderenza sulla ruota posteriore 1 Partecipante:
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
Seconda Università di Napoli Meccanica applicata alle macchine Prof. Ing. Domenico de Falco
 Seconda Università di Napoli Meccanica applicata alle macchine Prof. Ing. Domenico de Falco Prova pratica La cesoia a ghigliottina, rappresentata dallo schema in figura, è utilizzata per il taglio di una
Seconda Università di Napoli Meccanica applicata alle macchine Prof. Ing. Domenico de Falco Prova pratica La cesoia a ghigliottina, rappresentata dallo schema in figura, è utilizzata per il taglio di una
SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato
 SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato Automazione industriale 1- Disegnare lo schema di un semplice alimentatore di tensione continua da 24 volt mettendo in evidenza
SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato Automazione industriale 1- Disegnare lo schema di un semplice alimentatore di tensione continua da 24 volt mettendo in evidenza
PRESENTAZIONE DEL CORSO
 PRESENTAZIONE DEL CORSO Davide Giglio E-mail: [email protected] CORSO DI LAUREA IN INGEGNERIA INFORMATICA Obiettivo del Corso Lo studente al termine del corso sarà in grado di: modellare come sistemi
PRESENTAZIONE DEL CORSO Davide Giglio E-mail: [email protected] CORSO DI LAUREA IN INGEGNERIA INFORMATICA Obiettivo del Corso Lo studente al termine del corso sarà in grado di: modellare come sistemi
Schede tecniche di Fiat Panda 4x4 e Fiat Panda Trekking
 Schede tecniche di Fiat Panda 4x4 e Fiat Panda Trekking Trekking 4x4 1.3 Multijet 75 Cv Stop&Start 0.9 85 cv TwinAir Stop&Start 0.9 80CV CNG 1.3 Multijet 75 TwinAir Cv Stop&Start 0.9 85 cv TwinAir Stop&Start
Schede tecniche di Fiat Panda 4x4 e Fiat Panda Trekking Trekking 4x4 1.3 Multijet 75 Cv Stop&Start 0.9 85 cv TwinAir Stop&Start 0.9 80CV CNG 1.3 Multijet 75 TwinAir Cv Stop&Start 0.9 85 cv TwinAir Stop&Start
PIANO DI LAVORO DEI DOCENTI
 Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5. PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
Lancia Delta HF 4WD. 03. DOCUMENTAZIONE FOTOGRAFICA! Incollare le foto richieste in formato 10x15cm
 01. GENERALITA 01.1. NOME AUTOVEICOLO 01.2. TIPO CARROZZERIA Berlina Chiusa 5 porte. 01.3. PREFISSO E No TELAIO ZLA831AB0 01.4. PREFISSO E No MOTORE 831B5.000 01.5. ANNO DI COSTRUZIONE! Indicare l anno
01. GENERALITA 01.1. NOME AUTOVEICOLO 01.2. TIPO CARROZZERIA Berlina Chiusa 5 porte. 01.3. PREFISSO E No TELAIO ZLA831AB0 01.4. PREFISSO E No MOTORE 831B5.000 01.5. ANNO DI COSTRUZIONE! Indicare l anno
Lancia Delta HF integrale (evoluzione)
") 01. GENERALITA 01.1. NOME AUTOVEICOLO Lancia Delta HF integrale 01.2. TIPO CARROZZERIA Berlina Chiusa 5 porte. 01.3. PREFISSO E No TELAIO ZLA831AB0 01.4. PREFISSO E No MOTORE 831E5.000 01.5. ANNO DI COSTRUZIONE!
01. GENERALITA 01.1. NOME AUTOVEICOLO Lancia Delta HF integrale 01.2. TIPO CARROZZERIA Berlina Chiusa 5 porte. 01.3. PREFISSO E No TELAIO ZLA831AB0 01.4. PREFISSO E No MOTORE 831E5.000 01.5. ANNO DI COSTRUZIONE!
FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: [email protected]
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: [email protected]
Analisi a crash per microvettura con telaio tubolare
 ALMA MATER STUDIORUM - UNIVERSITA' DI BOLOGNA FACOLTA DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA MECCANICA ELABORATO FINALE DI LAUREA In Laboratorio CAD Analisi a crash per microvettura con telaio tubolare
ALMA MATER STUDIORUM - UNIVERSITA' DI BOLOGNA FACOLTA DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA MECCANICA ELABORATO FINALE DI LAUREA In Laboratorio CAD Analisi a crash per microvettura con telaio tubolare
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
Dinamica del Veicolo II Modellazione e Simulazione Multibody
 Dinamica del Veicolo II Modellazione e Simulazione Multibody Marco Amorosa Dinamica del Veicolo - Divisione Ducati Corse 13.12.2016 Agenda Obiettivo: fornire un idea delle attività svolte in Ducati per
Dinamica del Veicolo II Modellazione e Simulazione Multibody Marco Amorosa Dinamica del Veicolo - Divisione Ducati Corse 13.12.2016 Agenda Obiettivo: fornire un idea delle attività svolte in Ducati per
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco ([email protected]) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco ([email protected]) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
MECCANICA APPLICATA. Esercizi di ALLE MACCHINE I POLITECNICO DI BARI. PhD Student: Ing. Ilario De Vincenzo
 POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
ORGANI DI ATTERRAGGIO
 Funzioni IMPIANTI E SISTEMI AEROSPAZIALI ORGANI DI ATTERRAGGIO Stazionamento Stabilità e controllo direzionale durante taxing/rullaggio Controllo del decollo Assorbimento energia cinetica in atterraggio
Funzioni IMPIANTI E SISTEMI AEROSPAZIALI ORGANI DI ATTERRAGGIO Stazionamento Stabilità e controllo direzionale durante taxing/rullaggio Controllo del decollo Assorbimento energia cinetica in atterraggio
4 MASTER IN INGEGNERIA DEL VEICOLO DA COMPETIZIONE.
 4 MASTER IN INGEGNERIA DEL VEICOLO DA COMPETIZIONE www.peopledesign.it/master OBIETTIVI DEL CORSO Il settore dei motori da competizione è in costante ricerca di figure tecniche con competenze specialistiche
4 MASTER IN INGEGNERIA DEL VEICOLO DA COMPETIZIONE www.peopledesign.it/master OBIETTIVI DEL CORSO Il settore dei motori da competizione è in costante ricerca di figure tecniche con competenze specialistiche
PROGETTAZIONE DI UN INNOVATIVO ALLESTIMENTO PER AUTOCARRI ATTI ALLA RIMOZIONE E TRASPORTO DI AUTOVEICOLI
 Alma Mater Studiorum - Università degli studi di Bologna Seconda Facoltà di Ingegneria PROGETTAZIONE DI UN INNOVATIVO ALLESTIMENTO PER AUTOCARRI ATTI ALLA RIMOZIONE E TRASPORTO DI AUTOVEICOLI Relatore:
Alma Mater Studiorum - Università degli studi di Bologna Seconda Facoltà di Ingegneria PROGETTAZIONE DI UN INNOVATIVO ALLESTIMENTO PER AUTOCARRI ATTI ALLA RIMOZIONE E TRASPORTO DI AUTOVEICOLI Relatore:
Teoria del volo dell elicottero
 Giovanni Di Giorgio Teoria del volo dell elicottero Aerodinamica Meccanica del volo Seconda edizione Dott. Ing. Giovanni Di Giorgio Teoria del volo dell elicottero Aerodinamica Meccanica del volo Seconda
Giovanni Di Giorgio Teoria del volo dell elicottero Aerodinamica Meccanica del volo Seconda edizione Dott. Ing. Giovanni Di Giorgio Teoria del volo dell elicottero Aerodinamica Meccanica del volo Seconda
CMM-3D BANCO PER IL CONTROLLO DIMENSIONALE
 Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Università degli Studi di Cagliari
 Università degli Studi di Cagliari Laboratorio Eleonora d'arborea AUTOMAZIONE A FLUIDO Applicazione di controllori open-source a sistemi pneumatici con automazione a fluido Phd Student Eng. Mario Garau
Università degli Studi di Cagliari Laboratorio Eleonora d'arborea AUTOMAZIONE A FLUIDO Applicazione di controllori open-source a sistemi pneumatici con automazione a fluido Phd Student Eng. Mario Garau
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA. TITOLO DEL PROGETTO: ipec
 FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right