L o Daniela Ruggeri Stefano Sanna
|
|
|
- Geraldo Miele
- 8 anni fa
- Visualizzazioni
Transcript

1 Java & Lego Mindstorms L o Daniela Ruggeri Stefano Sanna 1

 Mindstorms Robotics Invention System Sviluppato in collaborazione con il MIT, il RIS è il primo esempio di intelligent brick totalmente programmabile CPU Hitachi 8-bit (16 Mhz) 16 Kb di ROM, 32")
2 LEGO Mindstorms LEGO... non ha bisogno di presentazioni! :-) Mindstorms Robotics Invention System Sviluppato in collaborazione con il MIT, il RIS è il primo esempio di intelligent brick totalmente programmabile CPU Hitachi 8-bit (16 Mhz) 16 Kb di ROM, 32 Kb di RAM 3 porte di input per i sensori 3 porte di output per i motori un display LCD a 5 caratteri e una porta di comunicazione a infrarossi. 2

3 LEGO Java Operating System Versione stabile: lejos_win32_2_1_0.zip Versione con bug: lejos rc2-win32.zip scaricabili dal sito 3

4 DIRECTORY LEJOS bin contiene gli eseguibili classes sorgenti java common contiene i files che sono usati per generare il codice per il linker e la virtual machine. docs documentazione examples esempi gameboy_impl file per la piattaforma Nintendo Game Boy jtools codice java base per il computer e codice del linker lejos, usa i file di common/*.db. 4

5 DIRECTORY LEJOS rcx_impl contiene codice C specifico per il firmware RCX. regression contiene tutta una serie di test di regressione per testare lejos tools contiene codice C per creare tools LeJOS unix_impl Questa directory contiene il codice necessario a creare un tool di emulazione Unix. vmsrc contiene codice C per la virtual machine. 5

6 Librerie jar rcxrcxcomm.jar gestione sensori, motori e comunicazione da RCX al pc pcrcxcomm.jar gestione comunicazione da pc a RCX 6

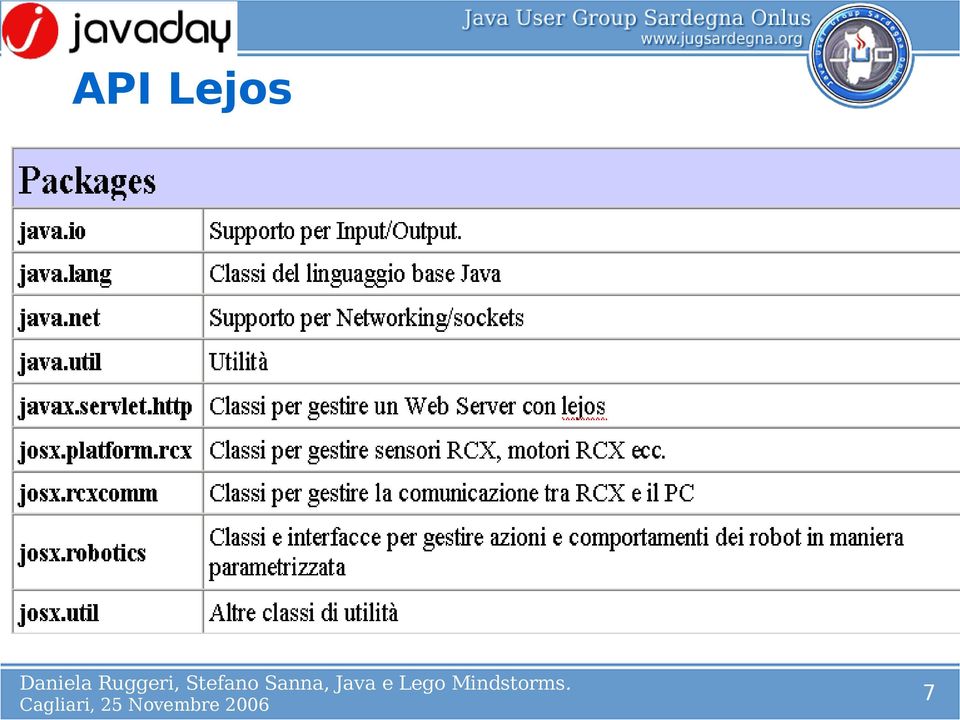
7 API Lejos 7
8 Archittetura lejos 8

9 Comandi per RCX lejosfirmdl (nuovo firmdl) fa caricare il firmware in RCX lejosc (nuovo lejosjc) compila i sorgenti java lejosrun trasferisce il programma binario in RCX tramite la torre lejos trasforma i programmi in file binari e li trasferisce in RCX tramite la torre IR Tower 9

10 Trasferimento codice 10


11 Inventorbot (roby) 11

12 Specifiche di programma 1. Fare in modo che il robot emetta dei suoni e alzi il cappello quando viene toccata la mano 3. Fare in modo che il robot emetta suoni diversi e giri in sensi diversi a secondo la durata della pressione esercitata sulla mano 5. Fare in modo che il robot saluti se viene colpito da una luce in faccia 12

13 Che serve sapere di Java? La base del linguaggio Gli eventi a delega I thread. 13

14 Calcolo del tempo josx.util.timer Oggetto Timer per gestire un intervallo di tempo josx.util.timerlistener Interfaccia ascoltatrice usata con la classe Timer In particolare il metodo timedout() dell interfaccia viene chiamato allo scadere del tempo fissato. 14
 dell interfaccia viene")
15 Cambiamento stato sensore osx.platform.rcx.sensor Astrazione di un sensore. In particolare Sensor.S1 rappresenta il sensore collegato alla porta 1 josx.util.sensorlistener Interfaccia ascoltatrice usata con la classe Sensor Il metodo statechanged(sensor asource, int aoldvalue, int anewvalue) per cambiamento stato del sensore. osx.platform.rcx. SensorCostant Interfaccia usata con la classe Sensor di tutte le costanti riguardanti un sensore 15
 per cambiamento stato del sensore. osx.platform.rcx.")
16 Altre classi usate osx.platform.rcx.motor Astrazione di un motore. In particolare Motor.A e Motor.C rappresentano i motori collegati alle porte A e C osx.platform.rcx.button Astrazione di un bottone RCX. In particolare nell esempio è utilizzato Button.RUN ma esistono anche Button.VIEW e Button.PRGM osx.platform.rcx.sound Classe usata per emettere suoni 16

17 Realizzazione calcolo del tempo // questa variabile vale true se il tempo trascorso è minore di 3 secondi boolean timeless3 = true; /* Creazione istanza della classe Timer associandola alla lista ascoltatrice che conterrà il tempo che passa */ Timer timer = new Timer(3000,new TimerListener(){ // trascorsi 3000 millisecondi viene chiamato questo metodo public void timedout() { timeless3 = false; } }); 17
 { timeless3 = false;")
18 Stati Sensore di contatto Sensor.S1.activate(); // attiva il sensore collegato alla porta 1 Sensor.S1.setPreviousValue (0); // imposta valore iniziale del sensore a 0 (rilasciato) // imposta tipo di sensore (sensore di contatto) e valori in output (booleani) Sensor.S1.setTypeAndMode (SENSOR_TYPE_TOUCH, SENSOR_MODE_BOOL); Sensor.S1.addSensorListener(new SensorListener() { // questo metodo viene chiamato quando il sensore cambia dallo stato premuto a quello // rilasciato e viceversa. public void statechanged(sensor asource, int aoldvalue, int anewvalue) { if (aoldvalue == 1 anewvalue == 0) { // sensore in stato di premuto. Start del timer timeless3=true; timer.start(); return; } 18
; Sensor.S1.")
19 Durata meno di 3 secondi timer.stop(); try { if (timeless3) { Sound.playTone(2100,300); Motor.C.forward(); Thread.sleep(1000); Motor.C.stop(); Sound.beep(); Motor.A.forward(); Thread.sleep(2000); Motor.A.stop(); Motor.C.backward(); Thread.sleep(1000); Motor.C.stop(); } 19
; Thread.sleep(1000); Motor.C.stop(); } 19")
20 Durata più di 3 secondi else { Sound.systemSound(true,3); Motor.C.backward(); Thread.sleep(1000); Motor.C.stop(); Sound.systemSound(true,4); Motor.A.backward(); Thread.sleep(2000); Motor.A.stop(); Motor.C.forward(); Thread.sleep(1000); Motor.C.stop(); Sound.systemSound(true,5); timeless3=true; } 20
; Thread.sleep(1000); Motor.C.stop(); Sound.")
21 Stati Sensore ottico Sensor.S3.activate(); // attiva il sensore collegato alla porta 1 Sensor.S3.setPreviousValue (0); // imposta valore iniziale del sensore a 0 // imposta tipo di sensore (sensore ottico) e valori in output (percentuale) Sensor.S3.setTypeAndMode (SENSOR_TYPE_LIGHT, SENSOR_MODE_PCT); Sensor.S3.addSensorListener(new SensorListener() { // questo metodo viene chiamato quando il sensore è colpito dalla luce public void statechanged(sensor asource, int aoldvalue, int anewvalue) { if (anewvalue > 80) { Motor.A.forward(); Thread.sleep(2000); Motor.A.stop(); } 21
22 Comandi shell per RCX set classpath=.;c:\lejos\lib\pcrcxcomm.jar; c:\lejos\lib\rcxrcxcomm.jar set path=c:\jdk1.4.0\bin;c:\lejos\bin;%path% set RCXTTY=usb lejosc Inventorbot.java lejos Inventorbot 22

23 LEGO Mindstorms NXT Caratteristiche hardware: Doppio microcontrollore: ARM7 32bit, 256 Kbyte FLASH, 64 Kbyte RAM AVR 8bit, 4 Kbyte FLASH, 512 Byte RAM 4 ingressi, 3 uscite Interfacce USB e Bluetooth Display grafico 100x64px Audio playback 8KHz Possibilità di realizzare network di quattro NXT (master + 3 slave) 23

24 NXT'reme: è tutto open! LEGO mette a disposizione della comunità degli sviluppatori risorse per implementare soluzioni originali: Aggiornamenti firmware Documentazione dettagliata dell'interfaccia hardware e delle porte I/O Documentazione dettagliata del protocollo di comunicazione attraverso Bluetooth Strumenti di sviluppo 24
25 WebNXT: controllare un robot via web Obiettivo: controllare da remoto un robot attraverso un browser web Cosa serve l'ultima versione Java Standard Edition un JSP/Servlet container una maschera JSP + un Bean Java alcune librerie Java per comunicare con il robot via Bluetooth un browser web 25
26 Java Server Pages Tecnologia della Sun. Simile a Active Server Pages della Microsoft JSP permette di creare pagine HTML e DHTML. Utile per costruire pagine che contengono informazioni presenti su altre pagine, prelevate da un database acquisite da input, ecc. (per esempio interagire via bluetooth con un robot) 26

27 Architettura 27
28 Prodotti usati Java Standard Edition versione JSP/Servlet container Tomcat Alex.jsp + il bean WebNXT.java Librerie java icommand.jar e RXTXcomm.jar e libreria nativa rxtxserial.dll Il browser Internet Explorer o Firefox 28
29 Cosa è necessario fare Creare collegamento bluetooth con NXT Impostare nel file icommand.properties parametro NXTCOMM=<porta bluetooth> Copiare il file icommand.properties nella directory Tomcat Creare sotto la directory copiare il servizio robot sotto la directory webapps di tomcat Copiare la libreria nativa rxtxserial.dll nella directory \bin di Tomcat Preparare la webapplication robot con Alex.jsp e WebNXT.class Far partire Tomcat Caricare la pagina 29
30 WebNxt: Classi usate command.nxtcomm.nxtcommand Classe per la spedizione e ricezione comandi da /per l'nxt command.nxtcomm.nxtprotocol Classe contenente i comandi da/per l'nxt 30
31 Classe NXTCommand Classe che contiene tutti i comandi da/per NXT spediti in questo formato Byte 0 = parte LSB lunghezza messaggio Byte 1 = parte MSB lunghezza messaggio Byte 2 = Tipo comando (es. comando sistema con risposta) Byte 3 = Comando (es. riproduci un suono contenuto in un file) Byte 4...Byte n (dati necessari al comando, es. nome del file contenente il suono da riprodurre) 31
32 Tipi di comandi (NXTProtocol) Tipo DIRECT_COMMAND_REPLY Byte Descrizione 0x00 Comando diretto con risposta SYSTEM_COMMAND_REPLY 0x01 Comando di sistema con risposta REPLY_COMMAND 0x02 Comando di risposta DIRECT_COMMAND_NOREPLY 0x80 Comando diretto senza risposta SYSTEM_COMMAND_NOREPLY 0x81 Comando di sistema senza risposta 32
33 Comandi di sistema (NXTProtocol) Tipo Byte Descrizione OPEN_READ 0x80 Apri file in lettura OPEN_WRITE 0x81 Apri file in scrittura READ 0x82 Leggi WRITE 0x83 Scrivi CLOSE 0x84 Chiude connessione DELETE 0x85 Cancella file FIND_FIRST 0x86 Trova il primo file nella directory e con il filtro specificati FIND_NEXT 0x87 Trova il prossimo file nella directory e con il filtro specificati GET_FIRMWARE_VERSION 0x88 Ritorna informazioni sul firmware SET_BRICK_NAME 0x98 Imposta nome NXT GET_DEVICE_INFO 0x9B Ottiene informazioni sul dispositivo NXT DELETE_USER_FLASH 0xA0 Cancella le informazioni nella memory Flash POLL_LENGTH 0xA1 Ottiene la lunghezza di messaggio di risposta ad un comando POLL 0xA2 Ottiene il messaggio di risposta ad un comando 33
34 Comandi diretti (NXTProtocol) Tipo Byte Descrizione START_PROGRAM 0x00 Lancia un programma nell'nxt STOP_PROGRAM 0x01 Ferma un programma nell'nxt PLAY_SOUND_FILE 0x02 Riproduce un suono di un file PLAY_TONE 0x03 Riborduce un tono SET_OUTPUT_STATE 0x04 Imposta parametri per un motote SET_INPUT_MODE 0x05 Imposta parametri per un sensore GET_OUTPUT_STATE 0x06 Ottiene parametri di un motote GET_INPUT_VALUES 0x07 Ottiene parametri di un sensore RESET_SCALED_INPUT_VALUE 0x08 Azzera impostazioni di un sensore 34
35 Comandi diretti (NXTProtocol) Tipo Byte Descrizione MESSAGE_WRITE 0x09 Spedisce un messaggio ad una casella inbox NXT RESET_MOTOR_POSITION 0x0A Azzera contagiri del motore GET_BATTERY_LEVEL 0x0B Ritorna il livello della batteria STOP_SOUND_PLAYBACK 0x0C Ferma la riproduzione di un suono KEEP_ALIVE 0x0D Lascia acceso l'nxt LS_GET_STATUS 0x0E Ritorna lo stato del sensore a ultrasuoni LS_WRITE 0x0F Imposta informazioni al sensore a ultrasuoni LS_READ 0x10 Legge informazioni di un sensore a ultrasuoni GET_CURRENT_PROGRAM_NAME 0x11 Ottiene il nome del programma che sta girando 35
36 Es. Ottiene versione firmware Comando spedito Byte 0 = 0x02 LSB Byte 1 = 0x00 MSB Byte 2 = 0x01 tipo comando sistema con risposta Byte 3 = 0x88 Comando GET_FIRMWARE_VERSION Comando ricevuto Byte 0 = 0x06 LSB Byte 1 = 0x00 MSB Byte 2 = 0x02 tipo comando risposta Byte 3... Byte 8 = Dati Firmware 36
37 La pagina Alex.jsp <jsp:usebean id="robotbeanid" scope="session" class="lego.webnxt" /> <form method="post" action="alex.jsp"> <% if (request.getparameter("chiudi")!= null) robotbeanid.close(); %> <jsp:setproperty name="robotbeanid" property="*" /> <input type="submit" name="avanti" value="avanti" > <input type="submit" name="stop" value="stop"><br> <input type="submit" name="indietro" value="indietro"> <input type="submit" name="saluta" value="saluta"><br> <input type="submit" name="chiudi" value="chiudi Connessione Bluetooth"><br> </form> 37
38 Risultato web 38
39 Comando Avanti e Indietro public void setavanti(string newvalue) throws Exception { System.out.println("avanti: "); NXTCommand.setVerify(true); Motor.B.forward(); Motor.C.forward(); } public void setindietro(string newvalue) throws Exception { NXTCommand.setVerify(true); Motor.B.backward(); Motor.C.backward(); } 39
40 Comando Saluta e Chiudi public void setsaluta(string newvalue) throws Exception { NXTCommand.setVerify(true); Motor.A.forward(1000); Speaker.playSoundFile("ciao.rso",false); } public void close() throws Exception { NXTCommand.close(); Thread.sleep(10000); } 40

41 JNXT 41
42 JNXT: un controller gestuale Obiettivo: controllare un robot attraverso gesti (o tratti) anziché con dei pulsanti: per rendere pù immediata l'interazione uomomacchina (il robot interpreta i gesti umani dell'utente anziché costringere questi a imparare un nuovo telecomando!) rendere i robot pilotabili da utenti con disabilità motorie Componenti software: Applicazione Java ME su PDA Windows Mobile Libreria di comunicazione verso l'interfaccia Bluetooth (Serial Port Profile) 42
43 Cosa occorre Windows Mobile: Java ME CLDC/MIDP gestisce l'input attraverso touch screen permette il collegamento a dispositivi Bluetooth permette di scrivere applicazioni per PDA permette di riutilizzare numerose librerie scritte per i telefoni cellulari Applicazione e libreria di comunicazione: JNXT per l'interazione gestuale icommand (scritto da Brian Bagnall) per il controllo low-level del NXT 43
44 Il touchscreen rileva i segni tracciati dall'utente icommand JNXT Il robot riceve i comandi via Bluetooth JNXT traduce i tratti in comandi di alto livello (avanti, indietro...) e utilizza icommand per i controlli a basso livello sui motori (Motore A avanti lentamente, Motore B indietro... 44
45 JNXT: alcune problematiche Tecniche: Porting di icommand su CLDC Scelta della VM Supporto JSR 82 (Bluetooth API) su Windows Mobile Emulazione input pen-based su desktop Semantiche: Attribuzione di un significato ai tratti sullo schermo Visualizzazione dei riscontri ottenuti dai sensori 45
46 Porting di icommand su CLDC icommand è modellato utilizzando esclusivamente classi Java 1.1: il porting è stato molto semplice: Properties: si è optato per una Hashtable popolata automaticamente in fase di inizializzazione della MIDlet SerialPort: Su Windows Mobile: CommConnection sostituisce le classi di JavaComm Su Symbian OS: StreamConnection sarà utilizzata come connessione sullo schema btspp La libreria per l'algebra in virgola mobile è ancora in fase di scelta (probabilmente verranno scritte alcune classi ad hoc) 46
47 Scelta della VM IBM offre una coppia di runtime environment (CDC/PP + CLDC/MIDP) di ottima qualità per Windows Mobile, Linux e PalmOS (solo CLDC) Vantaggi (versione CLDC): molto economica GUI ben integrata con il sistema operativo supporto: JSR 75, JSR 135, CommConnection input pen-based 47
48 Supporto JSR 82 La VM di IBM non fornisce supporto alla JSR 82: non è possibile gestire lo stack Bluetooth all'interno dell'applicazione Java ME Il supporto nativo alle connessioni seriali permette di sfruttare i servizi del sistema operativo per il discovery e il pairing dei dispositivi 48

49 Bluetooth Serial Port Profile 49
50 Accesso alla porta seriale L'attivazione della CommConnection attiva la richiesta di autorizzazione da parte dell'utente e la scelta del device Bluetooth da utilizzare: CommConnection commport; commport = (CommConnection) Connector.open("comm:COM6;baudrate=115200"); 50
51 Note sul Wireless Toolkit Il WTK fornisce emulatori phone oriented, senza supporto per l'input via penna. Per abilitarlo è sufficiente impostare un flag all'interno del file WTK_DIR\wtklib\devices\DEVICE_NAME\DEVICE_NAME.properties ad esempio: c:\wtk23\wtklib\devices\defaultcolorphone\defaultcolorphone.properties touch_screen=true 51
52 Semantica dei gesti /1 Vai avanti Torna indietro STOP 52
53 Semantica dei gesti /2 Avanti-sinistra Avanti-destra Torna indietro 53
54 Semantica dei gesti L H M L: lunghezza della retta M = H/W: coefficiente angolare della retta X2-X1: direzione (destra-sinistra) Y2-Y1: direzione (avanti-indietro) W 54

55 JNXT: sematica dei gesti Lunghezza = velocità motori VERSO = Y_ARRIVO > Y_PARTENZA Angolo di sterzata = coefficiente angolare 55
56 Pen-based input su MIDP Il Canvas su MIDP in ambiente PDA supporta la gestione degli eventi relativi al puntatore (penna): haspointerevents() e haspointermotionevents() permettono di conoscere a runtime le caratteristiche del dispositivo pointerpressed(), pointerdragged() e pointerreleased() sono i metodi di callback invocati quando lo stato del puntatore cambia. I metodi ricevono le coordinate x,y del punto al quale l'evento si riferisce 56
57 Il codice su JNXT /1 public void pointerpressed(int x, int y) { firstx = x; firsty = y; released = false; } public void pointerreleased(int x, int y) { float Y = (firsty y); float m = float X = (x - firstx); Y / X; lastm = m; getdirection(m); lastx = x; lasty = y; repaint(); } public void pointerdragged(int x, int y) { lastx = x; lasty = y; repaint(); } 57
58 Il codice su JNXT /2 private void getdirection(float m) { boolean forward = lasty < firsty; boolean right = lastx > firstx; m = Math.abs(m); if (m < 0.8) { lastmessage = "STOP"; listener.stop(); } 58
59 Evoluzioni JNXT sarà sviluppato per supportare: feedback sul PDA in base alle rilevazioni dei sensori (flash, colori, vibrazione) possibilità di tracciare percorsi curvilinei sostituzione della penna con un accelerometro maggiore interazione con altri dispositivi Bluetooth: RFID reader, SMS machine... 59
60 Riferimenti JNXT Pagina di JNXT: icommand: IBM Virtual Machine es/wireless/weme_eval_runtimes.html Java ME su PDA 60

61 Un libro di prossima uscita Maximum Lego NXT: Building Robots with Java Brains Brian Bagnall Variant Press, 2007 ISBN:
62 Grazie per l'attenzione. 62
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
C o m p o n ib ilità e in te r o p e r a b ilità :
 D o tt.s s a D a n ie la R u g g e r i - S te f a n o S a n n a J ia C o m p o n ib ilità e in te r o p e r a b ilità : LE G O & Java 1 Agenda Una breve introduzione Componibilità e Interoperabilità LEGO
D o tt.s s a D a n ie la R u g g e r i - S te f a n o S a n n a J ia C o m p o n ib ilità e in te r o p e r a b ilità : LE G O & Java 1 Agenda Una breve introduzione Componibilità e Interoperabilità LEGO
IRSplit. Istruzioni d uso 07/10-01 PC
 3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
La nuova generazione (NXT) di
 di") moria flash, 64Kbyte di RAM e clock a 48MHz. Un coprocessore Atmel AVR ad 8bit con 4Kbyte di memoria flash e 512Byte di RAM. Un CSR BlueCore 4, con 47Kbyte di RAM interna, memoria flash esterna ad 8Mbit
moria flash, 64Kbyte di RAM e clock a 48MHz. Un coprocessore Atmel AVR ad 8bit con 4Kbyte di memoria flash e 512Byte di RAM. Un CSR BlueCore 4, con 47Kbyte di RAM interna, memoria flash esterna ad 8Mbit
Software di sistema e software applicativo. I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche
 Software di sistema e software applicativo I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche Software soft ware soffice componente è la parte logica
Software di sistema e software applicativo I programmi che fanno funzionare il computer e quelli che gli permettono di svolgere attività specifiche Software soft ware soffice componente è la parte logica
Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base
 Sistema operativo Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base Architettura a strati di un calcolatore
Sistema operativo Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base Architettura a strati di un calcolatore
Istruzioni per l installazione
 MQSeries Everyplace Istruzioni per l installazione GC13-2909-00 MQSeries Everyplace Istruzioni per l installazione GC13-2909-00 Prima edizione (giugno 2000) Questa edizione si riferisce a MQSeries Everyplace
MQSeries Everyplace Istruzioni per l installazione GC13-2909-00 MQSeries Everyplace Istruzioni per l installazione GC13-2909-00 Prima edizione (giugno 2000) Questa edizione si riferisce a MQSeries Everyplace
Il Software. Il software del PC. Il BIOS
 Il Software Il software del PC Il computer ha grandi potenzialità ma non può funzionare senza il software. Il software essenziale per fare funzionare il PC può essere diviso nelle seguenti componenti:
Il Software Il software del PC Il computer ha grandi potenzialità ma non può funzionare senza il software. Il software essenziale per fare funzionare il PC può essere diviso nelle seguenti componenti:
Il SOFTWARE DI BASE (o SOFTWARE DI SISTEMA)
") Il software Software Il software Il software è la sequenza di istruzioni che permettono ai computer di svolgere i loro compiti ed è quindi necessario per il funzionamento del calcolatore. Il software può
Il software Software Il software Il software è la sequenza di istruzioni che permettono ai computer di svolgere i loro compiti ed è quindi necessario per il funzionamento del calcolatore. Il software può
11/02/2015 MANUALE DI INSTALLAZIONE DELL APPLICAZIONE DESKTOP TELEMATICO VERSIONE 1.0
 11/02/2015 MANUALE DI INSTALLAZIONE DELL APPLICAZIONE DESKTOP TELEMATICO VERSIONE 1.0 PAG. 2 DI 38 INDICE 1. PREMESSA 3 2. SCARICO DEL SOFTWARE 4 2.1 AMBIENTE WINDOWS 5 2.2 AMBIENTE MACINTOSH 6 2.3 AMBIENTE
11/02/2015 MANUALE DI INSTALLAZIONE DELL APPLICAZIONE DESKTOP TELEMATICO VERSIONE 1.0 PAG. 2 DI 38 INDICE 1. PREMESSA 3 2. SCARICO DEL SOFTWARE 4 2.1 AMBIENTE WINDOWS 5 2.2 AMBIENTE MACINTOSH 6 2.3 AMBIENTE
Il Sistema Operativo (1)
") E il software fondamentale del computer, gestisce tutto il suo funzionamento e crea un interfaccia con l utente. Le sue funzioni principali sono: Il Sistema Operativo (1) La gestione dell unità centrale
E il software fondamentale del computer, gestisce tutto il suo funzionamento e crea un interfaccia con l utente. Le sue funzioni principali sono: Il Sistema Operativo (1) La gestione dell unità centrale
Sistemi Operativi MECCANISMI E POLITICHE DI PROTEZIONE. D. Talia - UNICAL. Sistemi Operativi 13.1
 MECCANISMI E POLITICHE DI PROTEZIONE 13.1 Protezione Obiettivi della Protezione Dominio di Protezione Matrice di Accesso Implementazione della Matrice di Accesso Revoca dei Diritti di Accesso Sistemi basati
MECCANISMI E POLITICHE DI PROTEZIONE 13.1 Protezione Obiettivi della Protezione Dominio di Protezione Matrice di Accesso Implementazione della Matrice di Accesso Revoca dei Diritti di Accesso Sistemi basati
MECCANISMI E POLITICHE DI PROTEZIONE 13.1
 MECCANISMI E POLITICHE DI PROTEZIONE 13.1 Protezione Obiettivi della Protezione Dominio di Protezione Matrice di Accesso Implementazione della Matrice di Accesso Revoca dei Diritti di Accesso Sistemi basati
MECCANISMI E POLITICHE DI PROTEZIONE 13.1 Protezione Obiettivi della Protezione Dominio di Protezione Matrice di Accesso Implementazione della Matrice di Accesso Revoca dei Diritti di Accesso Sistemi basati
Sistemi operativi. Esempi di sistemi operativi
 Sistemi operativi Un sistema operativo è un programma che facilita la gestione di un computer Si occupa della gestione di tutto il sistema permettendo l interazione con l utente In particolare un sistema
Sistemi operativi Un sistema operativo è un programma che facilita la gestione di un computer Si occupa della gestione di tutto il sistema permettendo l interazione con l utente In particolare un sistema
IBM SPSS Statistics per Linux - Istruzioni di installazione (Licenza per sito)
") IBM SPSS Statistics per Linux - Istruzioni di installazione (Licenza per sito) Le seguenti istruzioni sono relative all installazione di IBM SPSS Statistics versione 21 con licenza per sito. Questo documento
IBM SPSS Statistics per Linux - Istruzioni di installazione (Licenza per sito) Le seguenti istruzioni sono relative all installazione di IBM SPSS Statistics versione 21 con licenza per sito. Questo documento
MANUALE D USO SAREMA SF1000
 MANUALE D USO SAREMA SF1000 COMPATIBILE WINDOWS VISTA Versione 1.2.0.0 Manuale RTS WPOS1 INDICE INDICE... 2 LEGENDA... 2 PREMESSA... 3 VERSIONI DEL PROGRAMMA... 3 COMPATIBILITA CON WINDOWS VISTA... 3 PROGRAMMAZIONE
MANUALE D USO SAREMA SF1000 COMPATIBILE WINDOWS VISTA Versione 1.2.0.0 Manuale RTS WPOS1 INDICE INDICE... 2 LEGENDA... 2 PREMESSA... 3 VERSIONI DEL PROGRAMMA... 3 COMPATIBILITA CON WINDOWS VISTA... 3 PROGRAMMAZIONE
Progetto: Servizio location based per la ricerca di punti di interesse
 Mauro Gentile Matr. 701870 Progetto: Servizio location based per la ricerca di punti di interesse Il progetto consiste nello sviluppo di un servizio che fornisce informazioni relative a punti di interesse
Mauro Gentile Matr. 701870 Progetto: Servizio location based per la ricerca di punti di interesse Il progetto consiste nello sviluppo di un servizio che fornisce informazioni relative a punti di interesse
Client - Server. Client Web: il BROWSER
 Client - Server Client Web: il BROWSER Il client Web è un applicazione software che svolge il ruolo di interfaccia fra l utente ed il WWW, mascherando la complessità di Internet. Funzioni principali Inviare
Client - Server Client Web: il BROWSER Il client Web è un applicazione software che svolge il ruolo di interfaccia fra l utente ed il WWW, mascherando la complessità di Internet. Funzioni principali Inviare
Introduzione al Linguaggio C
 Introduzione al Linguaggio C File I/O Daniele Pighin April 2009 Daniele Pighin Introduzione al Linguaggio C 1/15 Outline File e dati Accesso ai file File I/O Daniele Pighin Introduzione al Linguaggio C
Introduzione al Linguaggio C File I/O Daniele Pighin April 2009 Daniele Pighin Introduzione al Linguaggio C 1/15 Outline File e dati Accesso ai file File I/O Daniele Pighin Introduzione al Linguaggio C
Implementazione di MVC. Gabriele Pellegrinetti
 Implementazione di MVC Gabriele Pellegrinetti 2 Come implementare il pattern Model View Controller con le tecnologie JSP, ASP e XML Implementazione del pattern MVC in Java (JSP Model 2) SUN è stato il
Implementazione di MVC Gabriele Pellegrinetti 2 Come implementare il pattern Model View Controller con le tecnologie JSP, ASP e XML Implementazione del pattern MVC in Java (JSP Model 2) SUN è stato il
Motorola Phone Tools. Guida rapida
 Motorola Phone Tools Guida rapida Sommario Requisiti minimi...2 Operazioni preliminari all'installazione Motorola Phone Tools...3 Installazione Motorola Phone Tools...4 Installazione e configurazione del
Motorola Phone Tools Guida rapida Sommario Requisiti minimi...2 Operazioni preliminari all'installazione Motorola Phone Tools...3 Installazione Motorola Phone Tools...4 Installazione e configurazione del
1. Il Client Skype for Business
 1. Il Client Skype for Business 2. Configurare una Periferica Audio 3. Personalizzare una Periferica Audio 4. Gestire gli Stati di Presenza 5. Tabella Stati di Presenza 6. Iniziare una Chiamata 7. Iniziare
1. Il Client Skype for Business 2. Configurare una Periferica Audio 3. Personalizzare una Periferica Audio 4. Gestire gli Stati di Presenza 5. Tabella Stati di Presenza 6. Iniziare una Chiamata 7. Iniziare
MANUALE UTENTE. Computer Palmare WORKABOUT PRO
 MANUALE UTENTE Computer Palmare WORKABOUT PRO INDICE PROCEDURA DI INSTALLAZIONE:...3 GUIDA ALL UTILIZZO:...12 PROCEDURA DI AGGIORNAMENTO:...21 2 PROCEDURA DI INSTALLAZIONE: Per il corretto funzionamento
MANUALE UTENTE Computer Palmare WORKABOUT PRO INDICE PROCEDURA DI INSTALLAZIONE:...3 GUIDA ALL UTILIZZO:...12 PROCEDURA DI AGGIORNAMENTO:...21 2 PROCEDURA DI INSTALLAZIONE: Per il corretto funzionamento
Approccio stratificato
 Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Approccio stratificato Il sistema operativo è suddiviso in strati (livelli), ciascuno costruito sopra quelli inferiori. Il livello più basso (strato 0) è l hardware, il più alto (strato N) è l interfaccia
Istruzioni per l installazione del software per gli esami ICoNExam (Aggiornate al 15/01/2014)
") Istruzioni per l installazione del software per gli esami ICoNExam (Aggiornate al 15/01/2014) Il software per gli esami ICON può essere eseguito su qualunque computer dotato di Java Virtual Machine aggiornata.
Istruzioni per l installazione del software per gli esami ICoNExam (Aggiornate al 15/01/2014) Il software per gli esami ICON può essere eseguito su qualunque computer dotato di Java Virtual Machine aggiornata.
Panoramica: che cosa è necessario
 Scheda 02 L installazione dell SDK G IOVANNI PULITI Panoramica: che cosa è necessario Per poter lavorare con applicazioni Java o crearne di nuove, il programmatore deve disporre di un ambiente di sviluppo
Scheda 02 L installazione dell SDK G IOVANNI PULITI Panoramica: che cosa è necessario Per poter lavorare con applicazioni Java o crearne di nuove, il programmatore deve disporre di un ambiente di sviluppo
Sharpdesk V3.3. Guida all installazione Versione 3.3.04
 Sharpdesk V3.3 Guida all installazione Versione 3.3.04 Copyright 2000-2009 di SHARP CORPORATION. Tutti i diritti riservati. È vietata la riproduzione, l adattamento o la traduzione senza previa autorizzazione
Sharpdesk V3.3 Guida all installazione Versione 3.3.04 Copyright 2000-2009 di SHARP CORPORATION. Tutti i diritti riservati. È vietata la riproduzione, l adattamento o la traduzione senza previa autorizzazione
Visual basic base Lezione 01. L'ambiente di sviluppo
 L'ambiente di sviluppo L'ambiente di sviluppo Visual basic è un linguaggio di programmazione Microsoft. In questo corso prenderemo in considerazione, l'ultima versione. net di questo linguaggio. Microsoft
L'ambiente di sviluppo L'ambiente di sviluppo Visual basic è un linguaggio di programmazione Microsoft. In questo corso prenderemo in considerazione, l'ultima versione. net di questo linguaggio. Microsoft
Fondamenti di Informatica 1. Prof. B.Buttarazzi A.A. 2010/2011
 Fondamenti di Informatica 1 Prof. B.Buttarazzi A.A. 2010/2011 Sommario Installazione SOFTWARE JDK ECLIPSE 03/03/2011 2 ALGORITMI E PROGRAMMI PROBLEMA ALGORITMO PROGRAMMA metodo risolutivo linguaggio di
Fondamenti di Informatica 1 Prof. B.Buttarazzi A.A. 2010/2011 Sommario Installazione SOFTWARE JDK ECLIPSE 03/03/2011 2 ALGORITMI E PROGRAMMI PROBLEMA ALGORITMO PROGRAMMA metodo risolutivo linguaggio di
LIM OPEN SOURCE. Roberto Beligni. rbeligni@altratecnologia.com
 LIM OPEN SOURCE 2013 Roberto Beligni rbeligni@altratecnologia.com LIM OPEN SOURCE OGGI VEDREMO Cos'è la LIM e come costruirne una Wiildos il Sistema operativo per le LIM CHE COSA E' LA LIM? Lavagna Interattiva
LIM OPEN SOURCE 2013 Roberto Beligni rbeligni@altratecnologia.com LIM OPEN SOURCE OGGI VEDREMO Cos'è la LIM e come costruirne una Wiildos il Sistema operativo per le LIM CHE COSA E' LA LIM? Lavagna Interattiva
SOFTWARE. È l insieme delle istruzioni che è necessario fornire alla macchina per il suo funzionamento. Vi sono due categorie di software:
 1 SOFTWARE È l insieme delle istruzioni che è necessario fornire alla macchina per il suo funzionamento. Vi sono due categorie di software: SOFTWARE DI SISTEMA (o di base), che deve gestire le funzioni
1 SOFTWARE È l insieme delle istruzioni che è necessario fornire alla macchina per il suo funzionamento. Vi sono due categorie di software: SOFTWARE DI SISTEMA (o di base), che deve gestire le funzioni
Prova Finale a.a. 2011/2012. Laboratorio 1: Introduzione a Java e Eclipse
 Prova Finale a.a. 2011/2012 Laboratorio 1: Introduzione a Java e Eclipse 1 Java 6 Standard Edition Linguaggio Java (... (javac, Tool di sviluppo Librerie per l'interfaccia grafica Librerie di base Macchina
Prova Finale a.a. 2011/2012 Laboratorio 1: Introduzione a Java e Eclipse 1 Java 6 Standard Edition Linguaggio Java (... (javac, Tool di sviluppo Librerie per l'interfaccia grafica Librerie di base Macchina
VIRTUALIZZAZIONE. Docente: Marco Sechi Modulo 1
 1 VIRTUALIZZAZIONE Docente: Marco Sechi Modulo 1 Il linguaggio assemblyèil linguaggio del microprocessore. Un programma ècostituito daistruzioni assemblyche vengono interpretate ed eseguite dal microprocessore.
1 VIRTUALIZZAZIONE Docente: Marco Sechi Modulo 1 Il linguaggio assemblyèil linguaggio del microprocessore. Un programma ècostituito daistruzioni assemblyche vengono interpretate ed eseguite dal microprocessore.
MODELLO CLIENT/SERVER. Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it
 MODELLO CLIENT/SERVER Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it POSSIBILI STRUTTURE DEL SISTEMA INFORMATIVO La struttura di un sistema informativo
MODELLO CLIENT/SERVER Gianluca Daino Dipartimento di Ingegneria dell Informazione Università degli Studi di Siena daino@unisi.it POSSIBILI STRUTTURE DEL SISTEMA INFORMATIVO La struttura di un sistema informativo
Liceo Scientifico G. Galilei Trebisacce Anno Scolastico 2011-2012
 Liceo Scientifico G. Galilei Trebisacce Anno Scolastico 2011-2012 INFORMATICA: Hardware e Software Alunno: Classe: 1 C 08 novembre 2011 prof. Mimmo Corrado Effettua i seguenti calcoli nel sistema binario:
Liceo Scientifico G. Galilei Trebisacce Anno Scolastico 2011-2012 INFORMATICA: Hardware e Software Alunno: Classe: 1 C 08 novembre 2011 prof. Mimmo Corrado Effettua i seguenti calcoli nel sistema binario:
ShellExcel. Una domanda contiene i riferimenti (#A, #B, #C) alle celle che contengono i dati numerici del
 alle celle che contengono i dati numerici del") Progetto Software to Fit - ShellExcel Pagina 1 Manuale d'uso ShellExcel ShellExcel è una interfaccia per disabili che permette ad un alunno con difficoltà di apprendimento di esercitarsi ripetitivamente
Progetto Software to Fit - ShellExcel Pagina 1 Manuale d'uso ShellExcel ShellExcel è una interfaccia per disabili che permette ad un alunno con difficoltà di apprendimento di esercitarsi ripetitivamente
Manuale per la configurazione di AziendaSoft in rete
 Manuale per la configurazione di AziendaSoft in rete Data del manuale: 7/5/2013 Aggiornamento del manuale: 2.0 del 10/2/2014 Immagini tratte da Windows 7 Versione di AziendaSoft 7 Sommario 1. Premessa...
Manuale per la configurazione di AziendaSoft in rete Data del manuale: 7/5/2013 Aggiornamento del manuale: 2.0 del 10/2/2014 Immagini tratte da Windows 7 Versione di AziendaSoft 7 Sommario 1. Premessa...
MANUALE EDICOLA 04.05
 MANUALE EDICOLA 04.05 Questo è il video che si presenta avviando il programma di Gestione Edicola. Questo primo video è relativo alle operazioni di carico. CARICO Nello schermo di carico, in alto a sinistra
MANUALE EDICOLA 04.05 Questo è il video che si presenta avviando il programma di Gestione Edicola. Questo primo video è relativo alle operazioni di carico. CARICO Nello schermo di carico, in alto a sinistra
I satelliti. Accesso Remoto
 I satelliti Utilissimi nelle zone senza copertura cablata anche se vincolata alla sola ricezione dati. Mezzi necessari: 1. Parabola 2. Scheda satellitare Velocità di Download Velocità di Upload 400 Kbps
I satelliti Utilissimi nelle zone senza copertura cablata anche se vincolata alla sola ricezione dati. Mezzi necessari: 1. Parabola 2. Scheda satellitare Velocità di Download Velocità di Upload 400 Kbps
Installazione del Software. per lo Sviluppo di Applicazioni Java
 Installazione del Software per lo Sviluppo di Applicazioni Java Ing. Luca Ferrari ferrari.luca@unimore.it Tel. 0592056142 Installazione del Software per lo Sviluppo di Applicazioni Java 1 Il Compilatore
Installazione del Software per lo Sviluppo di Applicazioni Java Ing. Luca Ferrari ferrari.luca@unimore.it Tel. 0592056142 Installazione del Software per lo Sviluppo di Applicazioni Java 1 Il Compilatore
NOZIONI BASE PER ESERCITAZIONI
 NOZIONI BASE PER ESERCITAZIONI Shahram Rahatlou Laboratorio di Calcolo, Anno Accademico 2015-16 http://www.roma1.infn.it/people/rahatlou/labcalc/ Sistema Operativo Hardware Software n Routine e programmi
NOZIONI BASE PER ESERCITAZIONI Shahram Rahatlou Laboratorio di Calcolo, Anno Accademico 2015-16 http://www.roma1.infn.it/people/rahatlou/labcalc/ Sistema Operativo Hardware Software n Routine e programmi
TEST: Hardware e Software
 TEST: Hardware e Software 1. Che tipo di computer è il notebook? A. da tavolo B. generico C. non è un computer D. Portatile 2. Come è composto il computer? A. Software e Freeware B. Freeware e Antivirus
TEST: Hardware e Software 1. Che tipo di computer è il notebook? A. da tavolo B. generico C. non è un computer D. Portatile 2. Come è composto il computer? A. Software e Freeware B. Freeware e Antivirus
Versione 2.0. Manuale d uso. Software per la gestione. degli applicativi Bticino. TiManager 03/07-01 PC
 Versione 2.0 03/07-01 PC Manuale d uso TiManager Software per la gestione degli applicativi Bticino TiManager INDICE 2 1. Requisiti Hardware e Software Pag. 4 2. Installazione Pag. 4 3. Concetti fondamentali
Versione 2.0 03/07-01 PC Manuale d uso TiManager Software per la gestione degli applicativi Bticino TiManager INDICE 2 1. Requisiti Hardware e Software Pag. 4 2. Installazione Pag. 4 3. Concetti fondamentali
Tipi primitivi. Ad esempio, il codice seguente dichiara una variabile di tipo intero, le assegna il valore 5 e stampa a schermo il suo contenuto:
 Tipi primitivi Il linguaggio Java offre alcuni tipi di dato primitivi Una variabile di tipo primitivo può essere utilizzata direttamente. Non è un riferimento e non ha senso tentare di istanziarla mediante
Tipi primitivi Il linguaggio Java offre alcuni tipi di dato primitivi Una variabile di tipo primitivo può essere utilizzata direttamente. Non è un riferimento e non ha senso tentare di istanziarla mediante
IBM SPSS Statistics per Windows - Istruzioni di installazione (Licenza per utenti singoli)
") IBM SPSS Statistics per Windows - Istruzioni di installazione (Licenza per utenti singoli) Le seguenti istruzioni sono relative all installazione di IBM SPSS Statistics versione 19 con licenza per utenti
IBM SPSS Statistics per Windows - Istruzioni di installazione (Licenza per utenti singoli) Le seguenti istruzioni sono relative all installazione di IBM SPSS Statistics versione 19 con licenza per utenti
Altro esempio di HTML
 HTML (Hyper Text Markup Language) Linguaggio per descrivere una pagina di ipertesto Specifica come dovra apparire quando sara visualizzata, quali collegamenti contiene e dove portano Comando in HTML: riguarda
HTML (Hyper Text Markup Language) Linguaggio per descrivere una pagina di ipertesto Specifica come dovra apparire quando sara visualizzata, quali collegamenti contiene e dove portano Comando in HTML: riguarda
EDICOLA MANAGER 2.2. + EM Importer
 EDICOLA MANAGER 2.2 + EM Importer Con la versione 2.2 del programma sono state introdotte numerose novità grazie anche alla collaborazione di colleghi che hanno messo a disposizione utility e documenti
EDICOLA MANAGER 2.2 + EM Importer Con la versione 2.2 del programma sono state introdotte numerose novità grazie anche alla collaborazione di colleghi che hanno messo a disposizione utility e documenti
Il sistema di I/O. Hardware di I/O Interfacce di I/O Software di I/O. Introduzione
 Il sistema di I/O Hardware di I/O Interfacce di I/O Software di I/O Introduzione 1 Sotto-sistema di I/O Insieme di metodi per controllare i dispositivi di I/O Obiettivo: Fornire ai processi utente un interfaccia
Il sistema di I/O Hardware di I/O Interfacce di I/O Software di I/O Introduzione 1 Sotto-sistema di I/O Insieme di metodi per controllare i dispositivi di I/O Obiettivo: Fornire ai processi utente un interfaccia
Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android...
 Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Nozioni di Informatica di base. dott. Andrea Mazzini
 Nozioni di Informatica di base dott. Andrea Mazzini Hardware e Software Hardware: la parte fisica del calcolatore Software: l insieme di programmi che un calcolatore richiede per funzionare Nozioni di
Nozioni di Informatica di base dott. Andrea Mazzini Hardware e Software Hardware: la parte fisica del calcolatore Software: l insieme di programmi che un calcolatore richiede per funzionare Nozioni di
Le command line di Java
 Le command line di Java Esercitazioni di Programmazione 2 Novella Brugnolli brugnoll@science.unitn.it Ambiente di lavoro Per compilare ed eseguire un programma Java abbiamo bisogno di: The JavaTM 2 Platform,
Le command line di Java Esercitazioni di Programmazione 2 Novella Brugnolli brugnoll@science.unitn.it Ambiente di lavoro Per compilare ed eseguire un programma Java abbiamo bisogno di: The JavaTM 2 Platform,
Modulo. Programmiamo in Pascal. Unità didattiche COSA IMPAREREMO...
 Modulo A Programmiamo in Pascal Unità didattiche 1. Installiamo il Dev-Pascal 2. Il programma e le variabili 3. Input dei dati 4. Utilizziamo gli operatori matematici e commentiamo il codice COSA IMPAREREMO...
Modulo A Programmiamo in Pascal Unità didattiche 1. Installiamo il Dev-Pascal 2. Il programma e le variabili 3. Input dei dati 4. Utilizziamo gli operatori matematici e commentiamo il codice COSA IMPAREREMO...
Software di base. Corso di Fondamenti di Informatica
 Dipartimento di Informatica e Sistemistica Antonio Ruberti Sapienza Università di Roma Software di base Corso di Fondamenti di Informatica Laurea in Ingegneria Informatica (Canale di Ingegneria delle Reti
Dipartimento di Informatica e Sistemistica Antonio Ruberti Sapienza Università di Roma Software di base Corso di Fondamenti di Informatica Laurea in Ingegneria Informatica (Canale di Ingegneria delle Reti
GPS MANAGER Manuale Utente
 GPS MANAGER Manuale Utente Introduzione GPS Manager è il software AIM che mette la tecnologia GPS al servizio del pilota. Esso permette infatti di entrare in pista e cominciare a registrare i tempi sul
GPS MANAGER Manuale Utente Introduzione GPS Manager è il software AIM che mette la tecnologia GPS al servizio del pilota. Esso permette infatti di entrare in pista e cominciare a registrare i tempi sul
(Analisi, Estrazione ed invio via Email dei cedolini paga).
.") (Analisi, Estrazione ed invio via Email dei cedolini paga). Ver. 1.5 Unisoft Sas Via Oslavia, 6 67051 Avezzano (AQ) Tel. 0863 441426 Fax 0863 44074 unisoft@unisoft-net.it www.unisoft-net.it La procedura
(Analisi, Estrazione ed invio via Email dei cedolini paga). Ver. 1.5 Unisoft Sas Via Oslavia, 6 67051 Avezzano (AQ) Tel. 0863 441426 Fax 0863 44074 unisoft@unisoft-net.it www.unisoft-net.it La procedura
Come configurare l accesso ad Internet con il tuo telefonino GPRS EDGE* UMTS* (Sistema Operativi Microsoft Win95 e Win98).
.") Come configurare l accesso ad Internet con il tuo telefonino GPRS EDGE* UMTS* (Sistema Operativi Microsoft Win95 e Win98). OPERAZIONI PRELIMINARI Registrati gratuitamente al servizio I-BOX: qualora non
Come configurare l accesso ad Internet con il tuo telefonino GPRS EDGE* UMTS* (Sistema Operativi Microsoft Win95 e Win98). OPERAZIONI PRELIMINARI Registrati gratuitamente al servizio I-BOX: qualora non
START Easy GO! Il gestionale sempre in tasca! Procedura di aggiornamento. Documentazione utente Pagina 1 di 18
 Procedura di aggiornamento Il gestionale sempre in tasca! Documentazione utente Pagina 1 di 18 Sommario Avvertenze... 3 Operazioni preliminari... 3 Salvataggi... 3 Download aggiornamenti... 5 Aggiornamento
Procedura di aggiornamento Il gestionale sempre in tasca! Documentazione utente Pagina 1 di 18 Sommario Avvertenze... 3 Operazioni preliminari... 3 Salvataggi... 3 Download aggiornamenti... 5 Aggiornamento
IL SISTEMA OPERATIVO IL SISTEMA OPERATIVO INTERFACCE TESTUALI INTERFACCE TESTUALI FUNZIONI DEL SISTEMA OPERATIVO INTERFACCE GRAFICHE
 IL SISTEMA OPERATIVO Insieme di programmi che opera al di sopra della macchina fisica, mascherandone le caratteristiche e fornendo agli utenti funzionalità di alto livello. PROGRAMMI UTENTE INTERPRETE
IL SISTEMA OPERATIVO Insieme di programmi che opera al di sopra della macchina fisica, mascherandone le caratteristiche e fornendo agli utenti funzionalità di alto livello. PROGRAMMI UTENTE INTERPRETE
Rasip, MIDlet per scambio di messaggi SIP
 In Supremæ Dignitatis Università degli Studi di Pisa Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Specialistica in Tecnologie Informatiche Rasip, MIDlet per scambio di messaggi SIP
In Supremæ Dignitatis Università degli Studi di Pisa Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Specialistica in Tecnologie Informatiche Rasip, MIDlet per scambio di messaggi SIP
Introduzione. Installare EMAS Logo Generator
 EMAS Logo Generator Indice Introduzione... 3 Installare EMAS Logo Generator... 3 Disinstallare EMAS Logo Generator... 4 Schermata iniziale... 5 Creare il Logo... 7 Impostazioni... 7 Colore...8 Lingua del
EMAS Logo Generator Indice Introduzione... 3 Installare EMAS Logo Generator... 3 Disinstallare EMAS Logo Generator... 4 Schermata iniziale... 5 Creare il Logo... 7 Impostazioni... 7 Colore...8 Lingua del
View Mobile User s Guide
 View Mobile User s Guide 1 - Descrizione del software Il software è stato realizzato per essere utilizzato su telefoni cellulari con supporto per le applicazioni Java. Tramite il software è possibile collegarsi
View Mobile User s Guide 1 - Descrizione del software Il software è stato realizzato per essere utilizzato su telefoni cellulari con supporto per le applicazioni Java. Tramite il software è possibile collegarsi
Il sistema di elaborazione Hardware e software
 Il sistema di elaborazione Hardware e software A. Lorenzi M. Govoni TECNOLOGIE INFORMATICHE. Release 2.0 Atlas Hardware e software Un sistema di elaborazione è formato da: parti hardware: componenti fisiche
Il sistema di elaborazione Hardware e software A. Lorenzi M. Govoni TECNOLOGIE INFORMATICHE. Release 2.0 Atlas Hardware e software Un sistema di elaborazione è formato da: parti hardware: componenti fisiche
Compilatore risorse display grafico LCD serie IEC-line
 Compilatore risorse display grafico LCD serie IEC-line aggiornamento: 22-11-2012 IEC-line by OVERDIGIT overdigit.com 1. Il display grafico LCD I PLC della serie IPC-line possono disporre opzionalmente
Compilatore risorse display grafico LCD serie IEC-line aggiornamento: 22-11-2012 IEC-line by OVERDIGIT overdigit.com 1. Il display grafico LCD I PLC della serie IPC-line possono disporre opzionalmente
Il sistema di elaborazione
 Il sistema di elaborazione Hardware e software Hardware e software Un sistema di elaborazione è formato da: parti hardware: componenti fisiche parti software: componenti logiche i dati da trattare le correlazioni
Il sistema di elaborazione Hardware e software Hardware e software Un sistema di elaborazione è formato da: parti hardware: componenti fisiche parti software: componenti logiche i dati da trattare le correlazioni
Il Software e Il Sistema Operativo. Prof. Francesco Accarino IIS Altiero Spinelli A.S. 09/10
 Il Software e Il Sistema Operativo Prof. Francesco Accarino IIS Altiero Spinelli A.S. 09/10 Cosa Impareremo Programmi e Processi Struttura del Sistema Operativo Sviluppo di Programmi I files e la loro
Il Software e Il Sistema Operativo Prof. Francesco Accarino IIS Altiero Spinelli A.S. 09/10 Cosa Impareremo Programmi e Processi Struttura del Sistema Operativo Sviluppo di Programmi I files e la loro
MODULO 02. Iniziamo a usare il computer
 MODULO 02 Iniziamo a usare il computer MODULO 02 Unità didattica 01 Conosciamo il sistema operativo In questa lezione impareremo: a conoscere le caratteristiche del sistema operativo a cosa servono i sistemi
MODULO 02 Iniziamo a usare il computer MODULO 02 Unità didattica 01 Conosciamo il sistema operativo In questa lezione impareremo: a conoscere le caratteristiche del sistema operativo a cosa servono i sistemi
. A primi passi con microsoft a.ccepss SommarIo: i S 1. aprire e chiudere microsoft access Start (o avvio) l i b tutti i pro- grammi
 l i b tutti i pro- grammi") Capitolo Terzo Primi passi con Microsoft Access Sommario: 1. Aprire e chiudere Microsoft Access. - 2. Aprire un database esistente. - 3. La barra multifunzione di Microsoft Access 2007. - 4. Creare e salvare
Capitolo Terzo Primi passi con Microsoft Access Sommario: 1. Aprire e chiudere Microsoft Access. - 2. Aprire un database esistente. - 3. La barra multifunzione di Microsoft Access 2007. - 4. Creare e salvare
Procedura Gestione Pratiche Sicurezza Cantiere
 Procedura Gestione Pratiche Sicurezza Cantiere Importazione Imprese Cassa Edile Gestione Anagrafica Imprese Gestione Anagrafica Tecnici Gestione Pratiche Statistiche Tabelle Varie Gestione Agenda Appuntamenti
Procedura Gestione Pratiche Sicurezza Cantiere Importazione Imprese Cassa Edile Gestione Anagrafica Imprese Gestione Anagrafica Tecnici Gestione Pratiche Statistiche Tabelle Varie Gestione Agenda Appuntamenti
Direzione Centrale per le Politiche dell Immigrazione e dell Asilo
 Direzione Centrale per le Politiche dell Immigrazione e dell Asilo Sistema inoltro telematico domande di nulla osta, ricongiungimento e conversioni Manuale utente Versione 2 Data creazione 02/11/2007 12.14.00
Direzione Centrale per le Politiche dell Immigrazione e dell Asilo Sistema inoltro telematico domande di nulla osta, ricongiungimento e conversioni Manuale utente Versione 2 Data creazione 02/11/2007 12.14.00
Guida Installazione esam
 Requisiti Hardware per PC (Laptop e Desktop PC) Pentium 4 o maggiore USB 2.0, min. 2 porte disponibili (una vicina all altra) Connessione ad internet Sistema operativo: Windows 2000 con SP4 Windows XP
Requisiti Hardware per PC (Laptop e Desktop PC) Pentium 4 o maggiore USB 2.0, min. 2 porte disponibili (una vicina all altra) Connessione ad internet Sistema operativo: Windows 2000 con SP4 Windows XP
VISUALFLEET Software Overview
 soft-in VISUALFLEET Software Overview SOFTWARE PER SISTEMI INDUSTRIALI - Strada Antica di None 2/4A - 10092 BEINASCO (TO) - ITALY Tel.: +39-011-39.87.711 - Fax: +39-011-39.87.727 1 Introduzione Il software
soft-in VISUALFLEET Software Overview SOFTWARE PER SISTEMI INDUSTRIALI - Strada Antica di None 2/4A - 10092 BEINASCO (TO) - ITALY Tel.: +39-011-39.87.711 - Fax: +39-011-39.87.727 1 Introduzione Il software
IBM SPSS Statistics per Mac OS - Istruzioni di installazione (Licenza per sito)
") IBM SPSS Statistics per Mac OS - Istruzioni di installazione (Licenza per sito) Le seguenti istruzioni sono relative all installazione di IBM SPSS Statistics versione 21 con licenza per sito. Questo documento
IBM SPSS Statistics per Mac OS - Istruzioni di installazione (Licenza per sito) Le seguenti istruzioni sono relative all installazione di IBM SPSS Statistics versione 21 con licenza per sito. Questo documento
EDICOLA MANAGER 2.2. + EM Importer
 EDICOLA MANAGER 2.2 + EM Importer Con la versione 2.2 del programma sono state introdotte numerose novità grazie anche alla collaborazione di colleghi che hanno messo a disposizione utility e documenti
EDICOLA MANAGER 2.2 + EM Importer Con la versione 2.2 del programma sono state introdotte numerose novità grazie anche alla collaborazione di colleghi che hanno messo a disposizione utility e documenti
Esercitazione 4 JDBC
 JDBC Obiettivi dell esercitazione Familiarizzare con l'organizzazione dell'ambiente di lavoro per la realizzazione di applicazioni Java Utilizzare i costrutti di base della libreria JDBC per 1. la gestione
JDBC Obiettivi dell esercitazione Familiarizzare con l'organizzazione dell'ambiente di lavoro per la realizzazione di applicazioni Java Utilizzare i costrutti di base della libreria JDBC per 1. la gestione
1. INTRODUZIONE 2. REQUISITI MINIMI
 MANUALE D USO INDICE INTRODUZIONE... 2 REQUISITI MINIMI... 2 ISTALLAZIONE MAC OSX... 2 ISTALLAZIONE SU WINDOWS 7... 3 AVVIO DELL APPLICAZIONE AMAUDIOSENDER... 3 APPLICAZIONE WIFI HEADPHONE... 4 1 1. INTRODUZIONE
MANUALE D USO INDICE INTRODUZIONE... 2 REQUISITI MINIMI... 2 ISTALLAZIONE MAC OSX... 2 ISTALLAZIONE SU WINDOWS 7... 3 AVVIO DELL APPLICAZIONE AMAUDIOSENDER... 3 APPLICAZIONE WIFI HEADPHONE... 4 1 1. INTRODUZIONE
Programmazione in Java Parte I: Fondamenti
 Programmazione in Java Parte I: Fondamenti Lezione 1 Dott. Marco Faella Riferimenti Testi consigliati: Progettazione del software e design pattern in Java di C.S. Horstmann Apogeo Gli esempi di codice
Programmazione in Java Parte I: Fondamenti Lezione 1 Dott. Marco Faella Riferimenti Testi consigliati: Progettazione del software e design pattern in Java di C.S. Horstmann Apogeo Gli esempi di codice
In un modello a strati il SO si pone come un guscio (shell) tra la macchina reale (HW) e le applicazioni 1 :
 tra la macchina reale (HW) e le applicazioni 1 :") Un Sistema Operativo è un insieme complesso di programmi che, interagendo tra loro, devono svolgere una serie di funzioni per gestire il comportamento del computer e per agire come intermediario consentendo
Un Sistema Operativo è un insieme complesso di programmi che, interagendo tra loro, devono svolgere una serie di funzioni per gestire il comportamento del computer e per agire come intermediario consentendo
I MODULI Q.A.T. PANORAMICA. La soluzione modulare di gestione del Sistema Qualità Aziendale
 La soluzione modulare di gestione del Sistema Qualità Aziendale I MODULI Q.A.T. - Gestione clienti / fornitori - Gestione strumenti di misura - Gestione verifiche ispettive - Gestione documentazione del
La soluzione modulare di gestione del Sistema Qualità Aziendale I MODULI Q.A.T. - Gestione clienti / fornitori - Gestione strumenti di misura - Gestione verifiche ispettive - Gestione documentazione del
DFD FAQ FIRMA DIGITALE
 DFD FAQ FIRMA DIGITALE Note: Per evitare un blocco del browser dovuto ad un doppio caricamento dell'applicazione, alla visualizzazione della pagina di firma digitale cliccare sul pulsante FIRMA solo se
DFD FAQ FIRMA DIGITALE Note: Per evitare un blocco del browser dovuto ad un doppio caricamento dell'applicazione, alla visualizzazione della pagina di firma digitale cliccare sul pulsante FIRMA solo se
Sistemi Operativi IMPLEMENTAZIONE DEL FILE SYSTEM. D. Talia - UNICAL. Sistemi Operativi 9.1
 IMPLEMENTAZIONE DEL FILE SYSTEM 9.1 Implementazione del File System Struttura del File System Implementazione Implementazione delle Directory Metodi di Allocazione Gestione dello spazio libero Efficienza
IMPLEMENTAZIONE DEL FILE SYSTEM 9.1 Implementazione del File System Struttura del File System Implementazione Implementazione delle Directory Metodi di Allocazione Gestione dello spazio libero Efficienza
La struttura dati ad albero binario
 La struttura dati ad albero binario L albero è una struttura dati nella quale le informazioni sono organizzate in modo gerarchico, dall alto verso il basso. Gli elementi di un albero si chiamano nodi,
La struttura dati ad albero binario L albero è una struttura dati nella quale le informazioni sono organizzate in modo gerarchico, dall alto verso il basso. Gli elementi di un albero si chiamano nodi,
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari A.A. 2013 2014 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari A.A. 2013 2014 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
EL-USB-2 - Datalogger con interfaccia USB
 Caratteristiche EL-USB-2 - Datalogger con interfaccia USB Temperatura, umidità relativa e punto di rugiada. intervallo di misura da -35 a + 80 C e da 0 a 100% RH Indicazione del punto di rugiada tramite
Caratteristiche EL-USB-2 - Datalogger con interfaccia USB Temperatura, umidità relativa e punto di rugiada. intervallo di misura da -35 a + 80 C e da 0 a 100% RH Indicazione del punto di rugiada tramite
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
NOTE OPERATIVE. Prodotto Inaz Download Manager. Release 1.3.0
 Prodotto Inaz Download Manager Release 1.3.0 Tipo release COMPLETA RIEPILOGO ARGOMENTI 1. Introduzione... 2 2. Architettura... 3 3. Configurazione... 4 3.1 Parametri di connessione a Internet... 4 3.2
Prodotto Inaz Download Manager Release 1.3.0 Tipo release COMPLETA RIEPILOGO ARGOMENTI 1. Introduzione... 2 2. Architettura... 3 3. Configurazione... 4 3.1 Parametri di connessione a Internet... 4 3.2
Il software impiegato su un computer si distingue in: Sistema Operativo Compilatori per produrre programmi
 Il Software Il software impiegato su un computer si distingue in: Software di sistema Sistema Operativo Compilatori per produrre programmi Software applicativo Elaborazione testi Fogli elettronici Basi
Il Software Il software impiegato su un computer si distingue in: Software di sistema Sistema Operativo Compilatori per produrre programmi Software applicativo Elaborazione testi Fogli elettronici Basi
Architettura di un sistema operativo
 Architettura di un sistema operativo Dipartimento di Informatica Università di Verona, Italy Struttura di un S.O. Sistemi monolitici Sistemi a struttura semplice Sistemi a livelli Virtual Machine Sistemi
Architettura di un sistema operativo Dipartimento di Informatica Università di Verona, Italy Struttura di un S.O. Sistemi monolitici Sistemi a struttura semplice Sistemi a livelli Virtual Machine Sistemi
UTILIZZO DEI COOKIES (informativa conforme al Provvedimento del Garante Privacy del 8 Maggio 2014)
") UTILIZZO DEI COOKIES (informativa conforme al Provvedimento del Garante Privacy del 8 Maggio 2014) Star Link srl, Titolare del trattamento dei dati personali, informa che questo Sito internet fa uso di
UTILIZZO DEI COOKIES (informativa conforme al Provvedimento del Garante Privacy del 8 Maggio 2014) Star Link srl, Titolare del trattamento dei dati personali, informa che questo Sito internet fa uso di
Corso di Informatica (Programmazione) Lezione 6 (31 ottobre 2008)
 Lezione 6 (31 ottobre 2008)") Corso di Informatica (Programmazione) Lezione 6 (31 ottobre 2008) Introduzione a Java: primo programma, installazione dell ambiente di sviluppo, compilazione ed esecuzione 1 Introduzione Java è un linguaggio
Corso di Informatica (Programmazione) Lezione 6 (31 ottobre 2008) Introduzione a Java: primo programma, installazione dell ambiente di sviluppo, compilazione ed esecuzione 1 Introduzione Java è un linguaggio
Istruzioni di installazione di Intel Utilities
 Istruzioni di installazione di Intel Utilities Queste istruzioni spiegano come installare Intel Utilities dal CD n. 1 di Intel System Management Software (per i due CD della versione solo in inglese) o
Istruzioni di installazione di Intel Utilities Queste istruzioni spiegano come installare Intel Utilities dal CD n. 1 di Intel System Management Software (per i due CD della versione solo in inglese) o
Introduzione alle tecnologie informatiche. Strumenti mentali per il futuro
 Introduzione alle tecnologie informatiche Strumenti mentali per il futuro Panoramica Affronteremo i seguenti argomenti. I vari tipi di computer e il loro uso Il funzionamento dei computer Il futuro delle
Introduzione alle tecnologie informatiche Strumenti mentali per il futuro Panoramica Affronteremo i seguenti argomenti. I vari tipi di computer e il loro uso Il funzionamento dei computer Il futuro delle
PROTOTIPAZIONE DI UN TRADUTTORE DA SORGENTE PLC AD ASSEMBLY DI UNA MACCHINA VIRTUALE
 PROTOTIPAZIONE DI UN TRADUTTORE DA SORGENTE PLC AD ASSEMBLY DI UNA MACCHINA VIRTUALE Relatore: prof. Michele Moro Laureando: Marco Beggio Corso di laurea in Ingegneria Informatica Anno Accademico 2006-2007
PROTOTIPAZIONE DI UN TRADUTTORE DA SORGENTE PLC AD ASSEMBLY DI UNA MACCHINA VIRTUALE Relatore: prof. Michele Moro Laureando: Marco Beggio Corso di laurea in Ingegneria Informatica Anno Accademico 2006-2007
Collegamento remoto vending machines by do-dots
 Collegamento remoto vending machines by do-dots Ultimo aggiornamento 23 marzo 2011 rev1 - Stesura iniziale 18/10/2010 rev2 - Approfondimenti 12/11/2010 rev3 Riduzione dei contenuti per una lettura generica
Collegamento remoto vending machines by do-dots Ultimo aggiornamento 23 marzo 2011 rev1 - Stesura iniziale 18/10/2010 rev2 - Approfondimenti 12/11/2010 rev3 Riduzione dei contenuti per una lettura generica
ShellPictionary. Sistema operativo Microsoft Windows 98 o superiore Libreria SAPI e voce sintetica Casse audio
 Progetto Software to Fit - ShellPictionary Pagina 1 Presentazione ShellPictionary Il progetto è finalizzato alla realizzazione di una interfaccia per disabili motori verso l applicativo Pictionary. Pictionary
Progetto Software to Fit - ShellPictionary Pagina 1 Presentazione ShellPictionary Il progetto è finalizzato alla realizzazione di una interfaccia per disabili motori verso l applicativo Pictionary. Pictionary
Parte V. Sistemi Operativi & Reti. Sistemi Operativi. Sistemi Operativi
 Parte V & Reti Sistema operativo: insieme di programmi che gestiscono l hardware Hardware: CPU Memoria RAM Memoria di massa (Hard Disk) Dispositivi di I/O Il sistema operativo rende disponibile anche il
Parte V & Reti Sistema operativo: insieme di programmi che gestiscono l hardware Hardware: CPU Memoria RAM Memoria di massa (Hard Disk) Dispositivi di I/O Il sistema operativo rende disponibile anche il
Architettura Hardware e Software di A-Ratio! Davide Marano!
 Architettura Hardware e Software di A-Ratio! Davide Marano! Embedded ed LCD! Axiom SBC84600!!!VIA C3 800 Mhz!!!3 x RS 232 Ports!!!1 x RS 232/485 Port!!!1 x Parallel Port!!!2 x USB 1.1!!!1 x Ethernet!!!8
Architettura Hardware e Software di A-Ratio! Davide Marano! Embedded ed LCD! Axiom SBC84600!!!VIA C3 800 Mhz!!!3 x RS 232 Ports!!!1 x RS 232/485 Port!!!1 x Parallel Port!!!2 x USB 1.1!!!1 x Ethernet!!!8
PROCEDURA DI INSTALLAZIONE DRIVER WINDOWS 8 (32 O 64 BIT)
") PROCEDURA DI INSTALLAZIONE DRIVER WINDOWS 8 (32 O 64 BIT) PREMESSA: Per installare i driver corretti è necessario sapere se il tipo di sistema operativo utilizzato è a 32 bit o 64 bit. Qualora non si conosca
PROCEDURA DI INSTALLAZIONE DRIVER WINDOWS 8 (32 O 64 BIT) PREMESSA: Per installare i driver corretti è necessario sapere se il tipo di sistema operativo utilizzato è a 32 bit o 64 bit. Qualora non si conosca
Tutorial per l installazione del J2SE 6 e configurazione del sistema operativo
 Tutorial per l installazione del J2SE 6 e configurazione del sistema operativo Ing. Giovanni Ponti DEIS Università della Calabria gponti@deis.unical.it La piattaforma Java mette a disposizione una serie
Tutorial per l installazione del J2SE 6 e configurazione del sistema operativo Ing. Giovanni Ponti DEIS Università della Calabria gponti@deis.unical.it La piattaforma Java mette a disposizione una serie
Il web server Apache Lezione n. 3. Introduzione
 Procurarsi ed installare il web server Apache Introduzione In questa lezione cominciamo a fare un po di pratica facendo una serie di operazioni preliminari, necessarie per iniziare a lavorare. In particolar
Procurarsi ed installare il web server Apache Introduzione In questa lezione cominciamo a fare un po di pratica facendo una serie di operazioni preliminari, necessarie per iniziare a lavorare. In particolar
hiclot Manuale utente del software
 hiclot Manuale utente del software versione del 29/3/2010 Il software hiclot interfaccia un computer ad una unità hiclot al fine di potere: Seguire in tempo reale la formazione del coagulo Acquisire i
hiclot Manuale utente del software versione del 29/3/2010 Il software hiclot interfaccia un computer ad una unità hiclot al fine di potere: Seguire in tempo reale la formazione del coagulo Acquisire i