Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS. Navigazione in. Docente: Domenico Daniele Bloisi.
|
|
|
- Dionisia Cecchini
- 5 anni fa
- Visualizzazioni
Transcript










1 Maggio 2018 Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS Navigazione in Docente: Domenico Daniele Bloisi
2 References and credits Alcune delle slide seguenti sono tratte da Giorgio Grisetti, Introduction to Navigation using ROS Giorgio Grisetti, Introduction in Probabilistic Robotics Course Giorgio Grisetti, Multi-Pose Registration Graph-SLAM in Probabilistic Robotics Course YoonSeok Pyo, HanCheol Cho, RyuWoon Jung, TaeHoon Lim, ROS Robot Programming - A Handbook Written by TurtleBot3 Developers Learn TurtleBot and ROS ( Creating a Map Autonomous Navigation

3 Navigazione con robot mobili Il principale task che un robot autonomo mobile deve essere in grado di compiere è quello di saper muoversi nell ambiente operativo

4 Navigazione GPS Il navigatore, che utilizziamo nella vita di tutti i giorni, ci fornisce tre elementi di base: 1. una mappa 2. la nostra posizione sulla mappa 3. una rotta per la destinazione desiderata Questi tre elementi sono necessari per muoversi con successo nell ambiente Sono sufficienti?
5 Mapping, localization, planning mappa mapping localization una rotta per la destinazione desiderata path planning la nostra posizione sulla mappa
6 Navigation Con il termine navigation indichiamo il movimento del robot verso una destinazione predefinita Per poter navigare, un robot ha bisogno di: Avere una mappa dell ambiente Conoscere la propria posizione Avere una rotta (possibilmente ottimizzata) per raggiungere la destinazione Evitare gli ostacoli presenti sul percorso


7 Ambiente Strutturato Non strutturato
8 Ostacoli fissi e mobili In base all ambiente operativo in cui il robot si trova ad agire, si avranno ostacoli fissi muri e scale sono esempi di ostacoli fissi ostacoli mobili persone e sedie sono esempi di ostacoli mobili
9 Basic features Affinché il robot sia in grado di navigare autonomamente nell ambiente, avremo bisogno di ➊ Map ➋ Pose of Robot ➌ Sensing ➍ Path Calculation and Driving

10 Map A map is a representation of the environment where the robot is operating It should contain enough information to accomplish a task of interest Representations: Metric Grid Based Feature Based Hybrid Topological Hybrid
11 Robot pose La robot pose è definita come la posizione del robot e la sua orientazione in un dato sistema di riferimento Y v θ Per un robot mobile che si muove su un piano, la pose è definita dalla tripla [x, y, θ] y x X Introduction to Autonomous Mobile Robots Roland Siegwart, Illah Nourbakhsh, Davide Scaramuzza
12 Pose in ROS
13 Position in ROS pose = position + orientation
14 Orientation in ROS pose = position + orientation


15 Sensing Turtlebot3 360 Laser Distance Sensor LDS-01 OpenCR1.0 Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis Intel Realsense R200


16 Sensori di distanza Sonar Laser range finder Time of Flight Camera I sensori di distanza basati sul time-of-flight sfruttano la velocità di propagazione del suono o delle onde elettromagnetiche per calcolare la distanza Introduction to Autonomous Mobile Robots Roland Siegwart, Illah Nourbakhsh, Davide Scaramuzza
17 Laser Range Finder Introduction to Autonomous Mobile Robots Roland Siegwart, Illah Nourbakhsh, Davide Scaramuzza
18 laser range sensor with rotating mirror Introduction to Autonomous Mobile Robots Roland Siegwart, Illah Nourbakhsh, Davide Scaramuzza
19 Path A metric map defines a reference frame To operate in a map, a robot should know its position in that reference frame A sequence of waypoints or of actions to reach a goal location in the map is a path
20 Mapping Mapping Problem. Given 1. a robot that has a perfect ego-estimate of the position 2. a sequence of measurements Determine the map of the environment However, a perfect estimate of the robot pose is usually not available Usually, we solve a more complex problem: Simultaneous Localization and Mapping (SLAM)

21 Localization Determining the current position of a robot, given 1. The knowledge of the map 2. All sensor measurements up to the current time

22 Path planning Determine (if it exists) a path to reach a given goal location given a localized robot and a map of traversable regions
 exploration localization active localization path planning")
23 Mapping, localization, planning SLAM mapping integrated approaches (SPLAM) exploration localization active localization path planning

24 Simultaneous Localization and Mapping Estimate: 1. the map of the environment 2. the trajectory of a moving device using a sequence of sensor measurements these quantities are correlated
25 SLAM Determine the robot position AND the map, based on the sensor measurements

26 SLAM Turtlebot3
27 Graph-based SLAM Problem described as a graph Every node corresponds to a robot position and to a laser measurement
28 Graph-based SLAM An edge between two nodes represents a data-dependent spatial constraint between the nodes
29 Graph-based SLAM Once we have the graph we determine the most likely map by moving the nodes
30 Graph-based SLAM Then, we can render a map based on the known poses

31 Graph optimization A general Graph-based SLAM algorithm interleaves the two steps 1. Graph construction 2. Graph optimization
32 What Does the Graph Look Like? Each node x i is a 2D or 3D transformation representing the pose of the robot at time t i There is a constraint e ij between the node x i and the node x j if either the robot observed the same part of the environment from both x i and x j and, via this common observation, it constructs a virtual measurement about the position of x j or the positions are subsequent in time and there is an odometry measurement between the two
33 What Does the Graph Look Like? Each node x i is a 2D or 3D transformation representing the pose of the robot at time t i There is a constraint e ij between the node x i and the node x j if either the robot observed the same part of the environment from both x i and x j and, via this common observation, it constructs a virtual measurement about the position of x j or the positions are subsequent in time and there is an odometry measurement between the two
34 Pose graph z ij is a measurement of the robot pose j, performed from robot pose i Ω ij is a matrix to encode the uncertainty of the edge
35 Getting started - Navigation To navigate a robot we need 1. a map 2. a localization module 3. a path planning module These components are sufficient if the map fully reflects the environment the environment is static there are no errors in the estimate
36 Getting started - Navigation However 1. The environment changes (e.g., opening/closing doors) 2. It is dynamic (things might appear/disappear from the perception range of the robot) 3. The estimate is noisy Thus we need to complement our ideal design with other components that address these issues, namely 1. Obstacle-Detection/Avoidance 2. Local Map Refinement, based on the most recent sensor reading
37 ROS navigation stack Map provided by a Map Server Each module is a node Planner has a layered architecture (local and global planner) Obstacle sensing refined on-line by appropriate modules (local and global costmap)
38 Building the map in ROS ROS uses GMapping, which implements a particle filter to track the robot trajectories To build a map you need to 1. Record a bag with /odom, /scan and /tf while driving the robot around in the environment it is going to operate in 2. Play the bag and the gmapping-node (see the ros wiki), and then save it The map is an occupancy map and it is represented as 1. An image showing the blueprint of the environment 2. A configuration file (yaml) that gives meta information about the map (origin, size of a pixel in real world)
39 Localizing the robot ROS implements the Adaptive Monte Carlo Localization algorithm 1.AMCL uses a particle filter to track the position of the robot 2.Each pose is represented by a particle 3.Particles are Moved according to (relative) movement measured by the odometry Suppressed/replicated based on how well the laser scan fits the map, given the position of the particle
40 Virtual SLAM and Navigation Useremo i package ROS per lo SLAM per creare una mappa di un mondo simulato tramite Gazebo lo stack ROS per la navigazione per far muovere il TurtleBot3 verso una destinazione sulla mappa
41 Launch Gazebo $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_gazebo turtlebot3_world.launch

42 Launch Gazebo $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_gazebo turtlebot3_world.launch
43 Launch SLAM $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_slam turtlebot3_slam.launch
44 Launch SLAM $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_slam turtlebot3_slam.launch
45 Execute RViz $ export TURTLEBOT3_MODEL=waffle $ rosrun rviz rviz -d `rospack find turtlebot3_slam`/rviz/turtlebot3_slam.rviz

46 Execute RViz $ export TURTLEBOT3_MODEL=waffle $ rosrun rviz rviz -d `rospack find turtlebot3_slam`/rviz/turtlebot3_slam.rviz
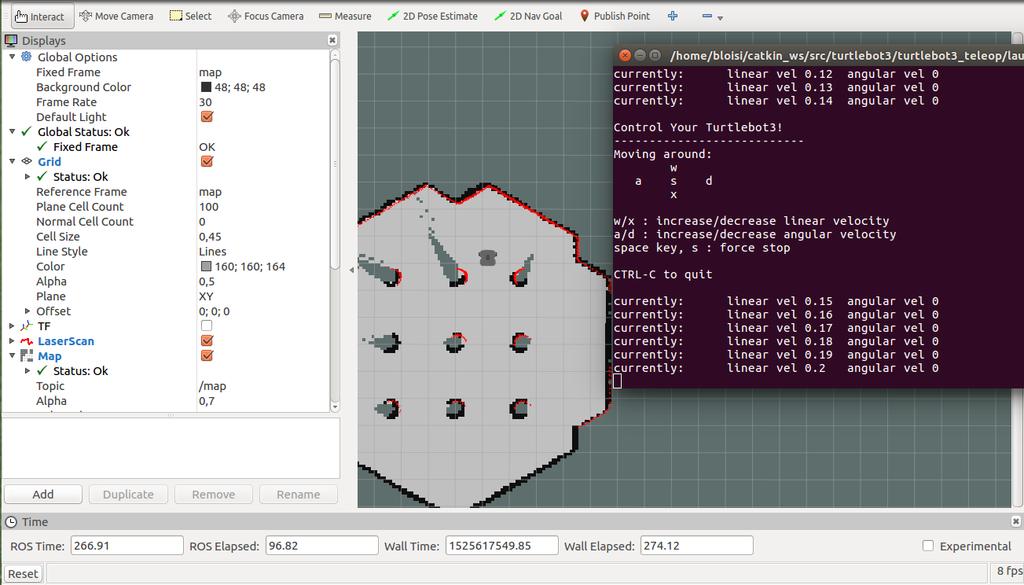
47 Remotely Control Turtlebot3 $ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch

48 Remotely Control Turtlebot3 $ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
49 Exploration

50 Exploration YoonSeok Pyo, HanCheol Cho, RyuWoon Jung, TaeHoon Lim, ROS Robot Programming - A Handbook Written by TurtleBot3 Developers
51 Save the Map Terminata l esplorazione, possiamo salvare la mappa che è stata generata con il map_server $ rosrun map_server map_saver -f ~/map

52 Save the Map Terminata l esplorazione, possiamo salvare la mappa che è stata generata con il map_server $ rosrun map_server map_saver -f ~/map
53 map.pgm
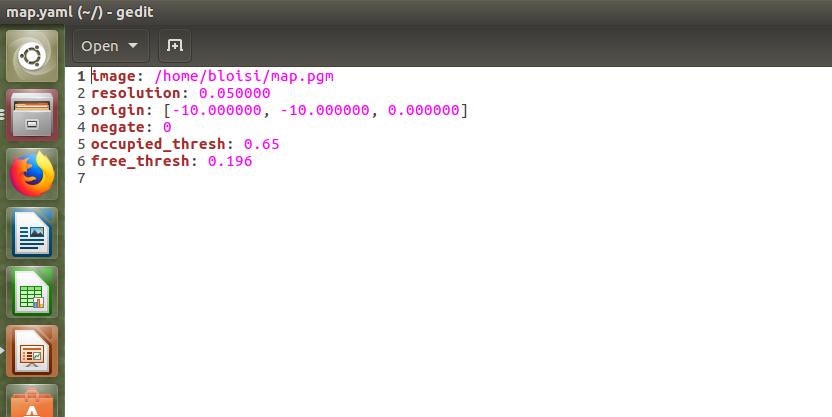
54 map.yaml
55 Navigazione Per poter procedere con la navigazione 1. Terminare tutti i processi attivi 2. Lanciare in un terminale $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_gazebo turtlebot3_world.launch 3. Aprire un secondo terminale e digitare $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$home/map.yaml

56 map_file $ export TURTLEBOT3_MODEL=waffle $ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$home/map.yaml

57 Navigazione - RViz 4. Aprire un terzo terminale e digitare $ export TURTLEBOT3_MODEL=waffle $ rosrun rviz rviz -d `rospack find turtlebot3_navigation`/rviz/turtlebot3_nav.rviz
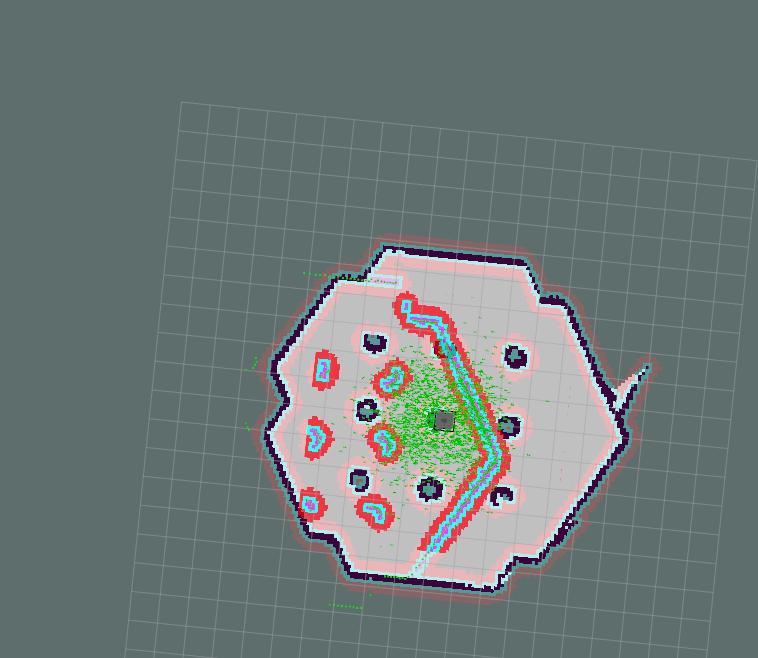
58 Navigazione - RViz

59 Pose Estimate Usiamo il tasto 2D Pose Estimate per fornire la guess sulla posizione iniziale del robot
60 Navigation Goal Usiamo il tasto 2D Nav Goal per fornire la destinazione desiderata al robot

61 Goal raggiunto

62 Esercizio 1 Creare una mappa dell ambiente Turtlebot3 House e utilizzarla per far navigare il robot platform/turtlebot3/simulation/
63 Esercizio 2 1. Provare a creare una mappa dell ambiente cyber_lab (scaricabile da 2. Utilizzare il turtlebot3 per navigare autonomamente nel mondo cyber_lab
64 Maggio 2018 Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS Navigazione in Docente: Domenico Daniele Bloisi
Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS. Esercitazione rosbag. Docente: Domenico Daniele Bloisi.
 Maggio 2018 Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS Esercitazione rosbag Docente: Domenico Daniele Bloisi References and credits Queste slide si basano sul materiale contenuto
Maggio 2018 Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS Esercitazione rosbag Docente: Domenico Daniele Bloisi References and credits Queste slide si basano sul materiale contenuto
Cinematica. modelli e vincoli. Corso di Robotica Parte di Laboratorio. Docente: Domenico Daniele Bloisi
 Laurea magistrale in Ingegneria e scienze informatiche Cinematica modelli e vincoli Corso di Robotica Parte di Laboratorio Docente: Domenico Daniele Bloisi Ottobre 2017 Obiettivo Capire il comportamento
Laurea magistrale in Ingegneria e scienze informatiche Cinematica modelli e vincoli Corso di Robotica Parte di Laboratorio Docente: Domenico Daniele Bloisi Ottobre 2017 Obiettivo Capire il comportamento
Graphs: Cycles. Tecniche di Programmazione A.A. 2012/2013
 Graphs: Cycles Tecniche di Programmazione Summary Definitions Algorithms 2 Definitions Graphs: Cycles Cycle A cycle of a graph, sometimes also called a circuit, is a subset of the edge set of that forms
Graphs: Cycles Tecniche di Programmazione Summary Definitions Algorithms 2 Definitions Graphs: Cycles Cycle A cycle of a graph, sometimes also called a circuit, is a subset of the edge set of that forms
Finite Model Theory / Descriptive Complexity: bin
 , CMPSCI 601: Recall From Last Time Lecture 19 Finite Model Theory / Descriptive Compleity: Th: FO L DSPACE Fagin s Th: NP SO. bin is quantifier-free.!#"$&% ('*), 1 Space 0 1 ) % Time $ "$ $ $ "$ $.....
, CMPSCI 601: Recall From Last Time Lecture 19 Finite Model Theory / Descriptive Compleity: Th: FO L DSPACE Fagin s Th: NP SO. bin is quantifier-free.!#"$&% ('*), 1 Space 0 1 ) % Time $ "$ $ $ "$ $.....
Robot mobili su ruote
 Marzo 2018 Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS Robot mobili su ruote Docente: Domenico Daniele Bloisi Manipolatori vs robot mobili I bracci robotici sono ancorati al terreno
Marzo 2018 Corso di Laboratorio Ciberfisico Modulo di Robot Programming with ROS Robot mobili su ruote Docente: Domenico Daniele Bloisi Manipolatori vs robot mobili I bracci robotici sono ancorati al terreno
How to register online for exams (Appelli) Version updated on 23/10/2017
 Version updated on 23/10/2017") How to register online for exams (Appelli) Version updated on 23/10/2017 The academic programs and the career plan Incoming students can take exams related to the courses offered by the Department where
How to register online for exams (Appelli) Version updated on 23/10/2017 The academic programs and the career plan Incoming students can take exams related to the courses offered by the Department where
Constant Propagation. A More Complex Semilattice A Nondistributive Framework
 Constant Propagation A More Complex Semilattice A Nondistributive Framework 1 The Point Instead of doing constant folding by RD s, we can maintain information about what constant, if any, a variable has
Constant Propagation A More Complex Semilattice A Nondistributive Framework 1 The Point Instead of doing constant folding by RD s, we can maintain information about what constant, if any, a variable has
UNIVERSITÀ DEGLI STUDI DI TORINO
 How to register online for exams (Appelli) Version updated on 18/11/2016 The academic programs and the career plan Incoming students can take exams related to the courses offered by the Department where
How to register online for exams (Appelli) Version updated on 18/11/2016 The academic programs and the career plan Incoming students can take exams related to the courses offered by the Department where
WEB OF SCIENCE. COVERAGE: multidisciplinary TIME RANGE: DOCUMENT TYPES: articles, proceedings papers, books
 WEB OF SCIENCE COVERAGE: multidisciplinary TIME RANGE: 1985- DOCUMENT TYPES: articles, proceedings papers, books WEB OF SCIENCE: SEARCH you can add one or more search field you can limit results to a specific
WEB OF SCIENCE COVERAGE: multidisciplinary TIME RANGE: 1985- DOCUMENT TYPES: articles, proceedings papers, books WEB OF SCIENCE: SEARCH you can add one or more search field you can limit results to a specific
LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI
 Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Data Alignment and (Geo)Referencing (sometimes Registration process)
Referencing (sometimes Registration process)") Data Alignment and (Geo)Referencing (sometimes Registration process) All data aquired from a scan position are refered to an intrinsic reference system (even if more than one scan has been performed) Data
Data Alignment and (Geo)Referencing (sometimes Registration process) All data aquired from a scan position are refered to an intrinsic reference system (even if more than one scan has been performed) Data
Android Development. Course Projects. Università degli Studi di Parma
 Android Development Course Projects This work is licensed under a Creative Commons Attribution NonCommercialShareAlike 4.0 International License. Marco Picone, Ph.D. marco.picone@unipr.it Mobile Application
Android Development Course Projects This work is licensed under a Creative Commons Attribution NonCommercialShareAlike 4.0 International License. Marco Picone, Ph.D. marco.picone@unipr.it Mobile Application
Singular Value Decomposition Applications
 Singular Value Decomposition Applications Prof. Mariolino De Cecco, Ing. Luca Baglivo 1 Department of Structural Mechanical Engineering, University of Trento Email: mariolino.dececco@ing.unitn.it The environment
Singular Value Decomposition Applications Prof. Mariolino De Cecco, Ing. Luca Baglivo 1 Department of Structural Mechanical Engineering, University of Trento Email: mariolino.dececco@ing.unitn.it The environment
Keep calm, observe and assess
 Keep calm, observe and assess Using the video sitcoms in Just Right to assess competences Data: 2 febbraio, 2017 Relatore: Roy Bennett 1 Just Right! & competences 2 Support Pearson Academy 3 SESSION AIMS
Keep calm, observe and assess Using the video sitcoms in Just Right to assess competences Data: 2 febbraio, 2017 Relatore: Roy Bennett 1 Just Right! & competences 2 Support Pearson Academy 3 SESSION AIMS
Fiori di campo. Conoscere, riconoscere e osservare tutte le specie di fiori selvatici più note
 Fiori di campo. Conoscere, riconoscere e osservare tutte le specie di fiori selvatici più note M. Teresa Della Beffa Click here if your download doesn"t start automatically Fiori di campo. Conoscere, riconoscere
Fiori di campo. Conoscere, riconoscere e osservare tutte le specie di fiori selvatici più note M. Teresa Della Beffa Click here if your download doesn"t start automatically Fiori di campo. Conoscere, riconoscere
How to register for exam sessions ( Appelli ) Version updated on 17/10/2018
 Version updated on 17/10/2018") How to register for exam sessions ( Appelli ) Version updated on 17/10/2018 Course catalogue and Piano Carriera (Career Plan) At the beginning of your exchange period in Torino you will need to register
How to register for exam sessions ( Appelli ) Version updated on 17/10/2018 Course catalogue and Piano Carriera (Career Plan) At the beginning of your exchange period in Torino you will need to register
I CAMBIAMENTI PROTOTESTO-METATESTO, UN MODELLO CON ESEMPI BASATI SULLA TRADUZIONE DELLA BIBBIA (ITALIAN EDITION) BY BRUNO OSIMO
 BY BRUNO OSIMO") I CAMBIAMENTI PROTOTESTO-METATESTO, UN MODELLO CON ESEMPI BASATI SULLA TRADUZIONE DELLA BIBBIA (ITALIAN EDITION) BY BRUNO OSIMO READ ONLINE AND DOWNLOAD EBOOK : I CAMBIAMENTI PROTOTESTO-METATESTO, UN MODELLO
I CAMBIAMENTI PROTOTESTO-METATESTO, UN MODELLO CON ESEMPI BASATI SULLA TRADUZIONE DELLA BIBBIA (ITALIAN EDITION) BY BRUNO OSIMO READ ONLINE AND DOWNLOAD EBOOK : I CAMBIAMENTI PROTOTESTO-METATESTO, UN MODELLO
Testi del Syllabus. Docente LODI RIZZINI DARIO Matricola: Insegnamento: ROBOTICA. Anno regolamento: 2013 CFU:
 Testi del Syllabus Docente LODI RIZZINI DARIO Matricola: 206099 Anno offerta: 2013/2014 Insegnamento: 07233 - ROBOTICA Corso di studio: 5015 - INGEGNERIA INFORMATICA Anno regolamento: 2013 CFU: 6 Settore:
Testi del Syllabus Docente LODI RIZZINI DARIO Matricola: 206099 Anno offerta: 2013/2014 Insegnamento: 07233 - ROBOTICA Corso di studio: 5015 - INGEGNERIA INFORMATICA Anno regolamento: 2013 CFU: 6 Settore:
Le piccole cose che fanno dimagrire: Tutte le mosse vincenti per perdere peso senza dieta (Italian Edition)
") Le piccole cose che fanno dimagrire: Tutte le mosse vincenti per perdere peso senza dieta (Italian Edition) Istituto Riza di Medicina Psicosomatica Click here if your download doesn"t start automatically
Le piccole cose che fanno dimagrire: Tutte le mosse vincenti per perdere peso senza dieta (Italian Edition) Istituto Riza di Medicina Psicosomatica Click here if your download doesn"t start automatically
LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI
 Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI
 Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
AVERE 30 ANNI E VIVERE CON LA MAMMA BIBLIOTECA BIETTI ITALIAN EDITION
 AVERE 30 ANNI E VIVERE CON LA MAMMA BIBLIOTECA BIETTI ITALIAN EDITION READ ONLINE AND DOWNLOAD EBOOK : AVERE 30 ANNI E VIVERE CON LA MAMMA BIBLIOTECA BIETTI ITALIAN EDITION PDF Click button to download
AVERE 30 ANNI E VIVERE CON LA MAMMA BIBLIOTECA BIETTI ITALIAN EDITION READ ONLINE AND DOWNLOAD EBOOK : AVERE 30 ANNI E VIVERE CON LA MAMMA BIBLIOTECA BIETTI ITALIAN EDITION PDF Click button to download
Customer Centric/Inquiry/E-bill. Tanya Enzminger
 Customer Centric/Inquiry/E-bill Tanya Enzminger Customer Centric E-bill On-line Electronic Billing system Real-time viewing of customer data including statement, payment, toll usage and other information
Customer Centric/Inquiry/E-bill Tanya Enzminger Customer Centric E-bill On-line Electronic Billing system Real-time viewing of customer data including statement, payment, toll usage and other information
ENGINE COMPONENT DESIGN Cap. 7 AIAA AIRCRAFT ENGINE DESIGN R03-23/10/2013
 CORSO DI LAUREA MAGISTRALE IN Ingegneria Aerospaziale PROPULSION AND COMBUSTION ENGINE COMPONENT DESIGN Cap. 7 AIAA AIRCRAFT ENGINE DESIGN R03-23/10/2013 LA DISPENSA E DISPONIBILE SU http://www.ingegneriaindustriale.unisalento.it/scheda_docente/-/people
CORSO DI LAUREA MAGISTRALE IN Ingegneria Aerospaziale PROPULSION AND COMBUSTION ENGINE COMPONENT DESIGN Cap. 7 AIAA AIRCRAFT ENGINE DESIGN R03-23/10/2013 LA DISPENSA E DISPONIBILE SU http://www.ingegneriaindustriale.unisalento.it/scheda_docente/-/people
LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI
 Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
SVD - Application to rigid-motion estimation
 SVD - Application to rigid-motion estimation Now we use SVD to estimate the rigid motion of the observer (usually the robot) with respect to a collection of markers acquired in the environment which must
SVD - Application to rigid-motion estimation Now we use SVD to estimate the rigid motion of the observer (usually the robot) with respect to a collection of markers acquired in the environment which must
Laboratorio di Intelligenza Artificiale
 Laboratorio di Intelligenza Artificiale Department of Computer, Control, and Management Engineering "Antonio Ruberti " Marco Imperoli PROGETTI FINALI May, 2017 NAVIGATION TASK GOAL: Data una lista di posizioni
Laboratorio di Intelligenza Artificiale Department of Computer, Control, and Management Engineering "Antonio Ruberti " Marco Imperoli PROGETTI FINALI May, 2017 NAVIGATION TASK GOAL: Data una lista di posizioni
Resources and Tools for Bibliographic Research. Search & Find Using Library Catalogues
 Resources and Tools for Bibliographic Research Search & Find Using Library Catalogues November 28, 2011 Donata Pieri Index Definition University of Padova Library System Catalogue CaPerE E-journals Catalogue
Resources and Tools for Bibliographic Research Search & Find Using Library Catalogues November 28, 2011 Donata Pieri Index Definition University of Padova Library System Catalogue CaPerE E-journals Catalogue
Lo sniffer. questo sconosciuto! Corso di Reti di Calcolatori Architetture e Servizi A.A. 2010/11. Introduzione allo sniffing TCP
 Corso di Reti di Calcolatori Architetture e Servizi A.A. 2010/11 Lo sniffer questo sconosciuto! Introduzione allo sniffing TCP Ing. Fabio Clarizia Ing. Luca Greco Outline Analisi dei segmenti TCP inviati
Corso di Reti di Calcolatori Architetture e Servizi A.A. 2010/11 Lo sniffer questo sconosciuto! Introduzione allo sniffing TCP Ing. Fabio Clarizia Ing. Luca Greco Outline Analisi dei segmenti TCP inviati
Linguaggi Corso M-Z - Laurea in Ingegneria Informatica A.A I/O, thread, socket in Java
 Linguaggi Corso M-Z - Laurea in Ingegneria Informatica A.A. 2009-2010 Alessandro Longheu http://www.diit.unict.it/users/alongheu alessandro.longheu@diit.unict.it Esercitazione I/O, thread, socket in Java
Linguaggi Corso M-Z - Laurea in Ingegneria Informatica A.A. 2009-2010 Alessandro Longheu http://www.diit.unict.it/users/alongheu alessandro.longheu@diit.unict.it Esercitazione I/O, thread, socket in Java
Gestire La Sicurezza Sul Lavoro
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with gestire la sicurezza
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with gestire la sicurezza
Radar signal contains 2 types of information: intensity and phase intensity lets us discriminate among materials
 Radar signal contains types of information: intensity and phase intensity lets us discriminate among materials Phase is used to measure topography and ground motion Interferometry: interaction between
Radar signal contains types of information: intensity and phase intensity lets us discriminate among materials Phase is used to measure topography and ground motion Interferometry: interaction between
ROTARY TENSIONERS TYPE ORIENT
 TENDITORI ORIENTABILI TIPO ORIENT Il tenditore orientabile ORIENT lavora come un dispositivo fisso, quindi al suo interno non si trovano ne molle elicoidali ne elastomeri. La sua peculiarità sta nel fatto
TENDITORI ORIENTABILI TIPO ORIENT Il tenditore orientabile ORIENT lavora come un dispositivo fisso, quindi al suo interno non si trovano ne molle elicoidali ne elastomeri. La sua peculiarità sta nel fatto
Il Libro Completo Della Prova Invalsi Per La 2 Elementare
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with il libro completo della
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with il libro completo della
College Algebra. Logarithms: Denitions and Domains. Dr. Nguyen November 9, Department of Mathematics UK
 College Algebra Logarithms: Denitions and Domains Dr. Nguyen nicholas.nguyen@uky.edu Department of Mathematics UK November 9, 2018 Agenda Logarithms and exponents Domains of logarithm functions Operations
College Algebra Logarithms: Denitions and Domains Dr. Nguyen nicholas.nguyen@uky.edu Department of Mathematics UK November 9, 2018 Agenda Logarithms and exponents Domains of logarithm functions Operations
A.A. 2006/2007 Laurea di Ingegneria Informatica. Fondamenti di C++ Horstmann Capitolo 3: Oggetti Revisione Prof. M. Angelaccio
 A.A. 2006/2007 Laurea di Ingegneria Informatica Fondamenti di C++ Horstmann Capitolo 3: Oggetti Revisione Prof. M. Angelaccio Obbiettivi Acquisire familiarità con la nozione di oggetto Apprendere le proprietà
A.A. 2006/2007 Laurea di Ingegneria Informatica Fondamenti di C++ Horstmann Capitolo 3: Oggetti Revisione Prof. M. Angelaccio Obbiettivi Acquisire familiarità con la nozione di oggetto Apprendere le proprietà
LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI
 Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Canti Popolari delle Isole Eolie e di Altri Luoghi di Sicilia (Italian Edition)
") Canti Popolari delle Isole Eolie e di Altri Luoghi di Sicilia (Italian Edition) L. Lizio-Bruno Click here if your download doesn"t start automatically Canti Popolari delle Isole Eolie e di Altri Luoghi
Canti Popolari delle Isole Eolie e di Altri Luoghi di Sicilia (Italian Edition) L. Lizio-Bruno Click here if your download doesn"t start automatically Canti Popolari delle Isole Eolie e di Altri Luoghi
NATIONAL SPORT SCHOOL
 NATIONAL SPORT SCHOOL Mark HALF-YEARLY EXAMINATION 2016 Level 4-6 FORM 1 ITALIAN TIME: 30 minutes LISTENING COMPREHENSION TEST (20 punti) Teacher s Paper Please first read the instructions carefully by
NATIONAL SPORT SCHOOL Mark HALF-YEARLY EXAMINATION 2016 Level 4-6 FORM 1 ITALIAN TIME: 30 minutes LISTENING COMPREHENSION TEST (20 punti) Teacher s Paper Please first read the instructions carefully by
Omeopatia: Guida medica ai rimedi omeopatici (Italian Edition)
") Omeopatia: Guida medica ai rimedi omeopatici (Italian Edition) Click here if your download doesn"t start automatically Omeopatia: Guida medica ai rimedi omeopatici (Italian Edition) Omeopatia: Guida medica
Omeopatia: Guida medica ai rimedi omeopatici (Italian Edition) Click here if your download doesn"t start automatically Omeopatia: Guida medica ai rimedi omeopatici (Italian Edition) Omeopatia: Guida medica
Self-Calibration Hands-on CASA introduction
 Self-Calibration Hands-on CASA introduction Adam North American ALMA Science Center Atacama Large Millimeter/submillimeter Array Expanded Very Large Array Robert C. Byrd Green Bank Telescope Very Long
Self-Calibration Hands-on CASA introduction Adam North American ALMA Science Center Atacama Large Millimeter/submillimeter Array Expanded Very Large Array Robert C. Byrd Green Bank Telescope Very Long
WELCOME UNIPA REGISTRATION:
 WELCOME This is a Step by Step Guide that will help you to register as an Exchange for study student to the University of Palermo. Please, read carefully this guide and prepare all required data and documents.
WELCOME This is a Step by Step Guide that will help you to register as an Exchange for study student to the University of Palermo. Please, read carefully this guide and prepare all required data and documents.
General info on using shopping carts with Ingenico epayments
 Tabella dei contenuti 1. Disclaimer 2. What is a PSPID? 3. What is an API user? How is it different from other users? 4. What is an operation code? And should I choose "Authorisation" or "Sale"? 5. What
Tabella dei contenuti 1. Disclaimer 2. What is a PSPID? 3. What is an API user? How is it different from other users? 4. What is an operation code? And should I choose "Authorisation" or "Sale"? 5. What
6.5 RNA Secondary Structure
 6.5 RNA Secondary Structure Struttura di una biomolecola Biomolecola: DNA, RNA Struttura primaria: descrizione esatta della sua composizione atomica e dei legami presenti fra gli atomi Struttura secondaria:
6.5 RNA Secondary Structure Struttura di una biomolecola Biomolecola: DNA, RNA Struttura primaria: descrizione esatta della sua composizione atomica e dei legami presenti fra gli atomi Struttura secondaria:
Soluzioni Libro Nuova Matematica A Colori 1
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with soluzioni libro nuova
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with soluzioni libro nuova
Exploiting a priori knowledge in exploration strategies for autonomous mobile robots
 Politecnico di Milano Scuola di Ingegneria Industriale e dell Informazione Dipartimento di Elettronica, Informazione e Bioingegneria MSc in Computer Science and Engineering Exploiting a priori knowledge
Politecnico di Milano Scuola di Ingegneria Industriale e dell Informazione Dipartimento di Elettronica, Informazione e Bioingegneria MSc in Computer Science and Engineering Exploiting a priori knowledge
ESERCIZIO 1 Si faccia riferimento all Allegato A - OPS 2016, problema ricorrente REGOLE E DEDUZIONI, pagina 2.
 ESERCIZIO 1 Si faccia riferimento all Allegato A - OPS 2016, problema ricorrente REGOLE E DEDUZIONI, pagina 2. Sono date le seguenti regole: regola(1,[p,q],a) regola(2,[b,x,a],w) regola(3,[h],c) regola(4,[a,n,q],v)
ESERCIZIO 1 Si faccia riferimento all Allegato A - OPS 2016, problema ricorrente REGOLE E DEDUZIONI, pagina 2. Sono date le seguenti regole: regola(1,[p,q],a) regola(2,[b,x,a],w) regola(3,[h],c) regola(4,[a,n,q],v)
Quando mi collego ad alcuni servizi hosting ricevo un messaggio relativo al certificato di protezione del sito SSL, come mai?
 IT FAQ-SSL Quando mi collego ad alcuni servizi hosting ricevo un messaggio relativo al certificato di protezione del sito SSL, come mai? Il certificato SSL relativo ai servizi hosting è stato rinnovato
IT FAQ-SSL Quando mi collego ad alcuni servizi hosting ricevo un messaggio relativo al certificato di protezione del sito SSL, come mai? Il certificato SSL relativo ai servizi hosting è stato rinnovato
Combinazioni serie HL-MHL + MHL. Sono disponibili varie combinazioni tra e riduttori coassiali serie MHL (2 stadio).
.") Combinazioni tra riduttori serie HL-MHL e MHL Possible combined units of helical inline gearboxes HL-MHL+MHL Combinazioni serie HL-MHL + MHL Sono disponibili varie combinazioni tra riduttori coassiali
Combinazioni tra riduttori serie HL-MHL e MHL Possible combined units of helical inline gearboxes HL-MHL+MHL Combinazioni serie HL-MHL + MHL Sono disponibili varie combinazioni tra riduttori coassiali
ECCO LE ISTRUZIONI PER INSERIRE IL MATERIALE RICHIESTO DAL BANDO TEATRO SENZA FILO CONTEST:
 ECCO LE ISTRUZIONI PER INSERIRE IL MATERIALE RICHIESTO DAL BANDO TEATRO SENZA FILO CONTEST: 1) Registrati su www.circyouity.com e creati un profilo personale o del gruppo* (non con il nome del progetto!)
ECCO LE ISTRUZIONI PER INSERIRE IL MATERIALE RICHIESTO DAL BANDO TEATRO SENZA FILO CONTEST: 1) Registrati su www.circyouity.com e creati un profilo personale o del gruppo* (non con il nome del progetto!)
LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI
 Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Read Online and Download Ebook LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO TESTAMENTO VERSIONE RIVEDUTA BY GIOVANNI LUZZI DOWNLOAD EBOOK : LA SACRA BIBBIA: OSSIA L'ANTICO E IL NUOVO Click link bellow and
Fisher Linear discriminant analysis (pag 228)
") Fisher Linear discriminant analysis (pag 228) 1 Nell Analisi delle componenti proncipali PCA si trovano quelle componenti utili per la rappresentazione dei dati Tali componenti non sono utili a discriminare
Fisher Linear discriminant analysis (pag 228) 1 Nell Analisi delle componenti proncipali PCA si trovano quelle componenti utili per la rappresentazione dei dati Tali componenti non sono utili a discriminare
Scheduling. Scheduler. Class 1 Class 2 Class 3 Class 4. Scheduler. Class 1 Class 2 Class 3 Class 4. Scheduler. Class 1 Class 2 Class 3 Class 4
 Course of Multimedia Internet (Sub-course Reti Internet Multimediali ), AA 2010-2011 Prof. 4. Scheduling Pag. 1 Scheduling In other architectures, buffering and service occur on a per-flow basis That is,
Course of Multimedia Internet (Sub-course Reti Internet Multimediali ), AA 2010-2011 Prof. 4. Scheduling Pag. 1 Scheduling In other architectures, buffering and service occur on a per-flow basis That is,
IL GIOVANE HOLDEN FRANNY E ZOOEY NOVE RACCONTI ALZATE LARCHITRAVE CARPENTIERI E SEYMOUR INTRODUZIONE BY JD SALINGER
 IL GIOVANE HOLDEN FRANNY E ZOOEY NOVE RACCONTI ALZATE LARCHITRAVE CARPENTIERI E SEYMOUR INTRODUZIONE BY JD SALINGER READ ONLINE AND DOWNLOAD EBOOK : IL GIOVANE HOLDEN FRANNY E ZOOEY NOVE RACCONTI ALZATE
IL GIOVANE HOLDEN FRANNY E ZOOEY NOVE RACCONTI ALZATE LARCHITRAVE CARPENTIERI E SEYMOUR INTRODUZIONE BY JD SALINGER READ ONLINE AND DOWNLOAD EBOOK : IL GIOVANE HOLDEN FRANNY E ZOOEY NOVE RACCONTI ALZATE
Optmization Methods for Machine Learning. Gradient method for multilayer perceptron
 Optmization Methods for Machine Learning Laura Palagi http://www.dis.uniroma1.it/ palagi Dipartimento di Ingegneria informatica automatica e gestionale A. Ruberti Sapienza Università di Roma Via Ariosto
Optmization Methods for Machine Learning Laura Palagi http://www.dis.uniroma1.it/ palagi Dipartimento di Ingegneria informatica automatica e gestionale A. Ruberti Sapienza Università di Roma Via Ariosto
Guida ai Promessi Sposi - Riassunto e analisi dei personaggi: Analisi e interpretazione del romanzo di A. Manzoni (Italian Edition)
") Guida ai Promessi Sposi - Riassunto e analisi dei personaggi: Analisi e interpretazione del romanzo di A. Manzoni (Italian Edition) Studia Rapido Click here if your download doesn"t start automatically
Guida ai Promessi Sposi - Riassunto e analisi dei personaggi: Analisi e interpretazione del romanzo di A. Manzoni (Italian Edition) Studia Rapido Click here if your download doesn"t start automatically
SolidNetwork License Manager
 PROCEDURA PER L AGGIORNAMENTO DELLE LICENZE DI RETE SOLIDWORKS PREMESSE Il Gestore delle licenze flottanti SolidWorks, denominato SolidNetWork License Manager (SNL), deve essere aggiornato ALMENO alla
PROCEDURA PER L AGGIORNAMENTO DELLE LICENZE DI RETE SOLIDWORKS PREMESSE Il Gestore delle licenze flottanti SolidWorks, denominato SolidNetWork License Manager (SNL), deve essere aggiornato ALMENO alla
Helping you to rescue me
 XI Autism-Europe International Congress 2016 33170 Italy Helping you to rescue me The rescue of people with ASD: guidelines for firefighters Emanuela Sedran, Marianna Filippini, Odette Copat, Stefano Zanut^,
XI Autism-Europe International Congress 2016 33170 Italy Helping you to rescue me The rescue of people with ASD: guidelines for firefighters Emanuela Sedran, Marianna Filippini, Odette Copat, Stefano Zanut^,
INTERNET & MARKETING INNOVATIVE COMMUNICATION.
 INTERNET & MARKETING INNOVATIVE COMMUNICATION www.sunet.it Passion Our passion to what we do every day allows us to have a special creativity and constantly improve the process of realization and execution.
INTERNET & MARKETING INNOVATIVE COMMUNICATION www.sunet.it Passion Our passion to what we do every day allows us to have a special creativity and constantly improve the process of realization and execution.
Guida Alla Programmazione Con R Corso Completo Per Imparare A Programmare In Poco Tempo
 Guida Alla Programmazione Con R Corso Completo Per Imparare A Programmare In Poco Tempo We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online
Guida Alla Programmazione Con R Corso Completo Per Imparare A Programmare In Poco Tempo We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online
Single-rate three-color marker (srtcm)
") 3. Markers Pag. 1 The Single Rate Three Color Marker (srtcm) can be used as component in a Diffserv traffic conditioner The srtcm meters a traffic stream and marks its packets according to three traffic
3. Markers Pag. 1 The Single Rate Three Color Marker (srtcm) can be used as component in a Diffserv traffic conditioner The srtcm meters a traffic stream and marks its packets according to three traffic
REGISTRATION GUIDE TO RESHELL SOFTWARE
 REGISTRATION GUIDE TO RESHELL SOFTWARE INDEX: 1. GENERAL INFORMATION 2. REGISTRATION GUIDE 1. GENERAL INFORMATION This guide contains the correct procedure for entering the software page http://software.roenest.com/
REGISTRATION GUIDE TO RESHELL SOFTWARE INDEX: 1. GENERAL INFORMATION 2. REGISTRATION GUIDE 1. GENERAL INFORMATION This guide contains the correct procedure for entering the software page http://software.roenest.com/
Libri Di Matematica Scaricabili Gratuitamente
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with libri di matematica
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with libri di matematica
Percorsi: L'Italia Attraverso La Lingua E La Cultura, Books A La Carte Plus MyItalianLab By Francesca Italiano, Irene Marchegiani READ ONLINE
 Percorsi: L'Italia Attraverso La Lingua E La Cultura, Books A La Carte Plus MyItalianLab By Francesca Italiano, Irene Marchegiani READ ONLINE Percorsi: L'Ialia attraverso la lingua e la cultura, Books
Percorsi: L'Italia Attraverso La Lingua E La Cultura, Books A La Carte Plus MyItalianLab By Francesca Italiano, Irene Marchegiani READ ONLINE Percorsi: L'Ialia attraverso la lingua e la cultura, Books
Robot Operating System
 Robot Operating System Lezione 2 A cura di: Jonathan Cacace 1 Outline Lezione 1: Lezione 2: Introduzione; Primi passi. Messaggi in Ros; ROS Stage; Esempio di applicazione; RosAria. 2 Messaggi ROS In ROS
Robot Operating System Lezione 2 A cura di: Jonathan Cacace 1 Outline Lezione 1: Lezione 2: Introduzione; Primi passi. Messaggi in Ros; ROS Stage; Esempio di applicazione; RosAria. 2 Messaggi ROS In ROS
Il Piccolo Principe siamo noi: Adattamento teatrale per la scuola primaria (ABW. Antoine de Saint- Exupery) (Volume 1) (Italian Edition)
 (Volume 1) (Italian Edition)") Il Piccolo Principe siamo noi: Adattamento teatrale per la scuola primaria (ABW. Antoine de Saint- Exupery) (Volume 1) (Italian Edition) Antoine de Saint-Exupery Click here if your download doesn"t start
Il Piccolo Principe siamo noi: Adattamento teatrale per la scuola primaria (ABW. Antoine de Saint- Exupery) (Volume 1) (Italian Edition) Antoine de Saint-Exupery Click here if your download doesn"t start
Manuale Di Diritto Internazionale Del Lavoro
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with manuale di diritto internazionale
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with manuale di diritto internazionale
CCTV DIVISION. Guida Alla Lettura del Numero Seriale, Codice Prodotto, Versione Firmware, Versione Software, Codice Libretto
 CCTV DIVISION Guida Alla Lettura del Numero Seriale, Codice Prodotto, Versione Firmware, Versione Software, Codice Libretto How to Get Serial Number, Firmware Version, Product Code, Software Version, User
CCTV DIVISION Guida Alla Lettura del Numero Seriale, Codice Prodotto, Versione Firmware, Versione Software, Codice Libretto How to Get Serial Number, Firmware Version, Product Code, Software Version, User
Exam of DIGITAL ELECTRONICS June 14 th, 2012 Prof. Marco Sampietro
 Exam of DIGITAL ELECTRONICS June 14 th, 2012 Prof. Marco Sampietro Matr. N NAME CMOS circuits Si supponga di avere una tecnologia CMOS con le seguenti caratteristiche: p =400 cm 2 /V s, n =1200 cm 2 /V
Exam of DIGITAL ELECTRONICS June 14 th, 2012 Prof. Marco Sampietro Matr. N NAME CMOS circuits Si supponga di avere una tecnologia CMOS con le seguenti caratteristiche: p =400 cm 2 /V s, n =1200 cm 2 /V
Codice Della Luce Il File Type
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with codice della luce il
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with codice della luce il
07/02/2011. Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze. Mechanics. Statics constant state of motion
 Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze Mechanics Statics constant state of motion Dynamics acceleration present Kinetics of motionless systems Constant velocity systems
Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze Mechanics Statics constant state of motion Dynamics acceleration present Kinetics of motionless systems Constant velocity systems
CORSO MOC10324: Implementing and Managing Microsoft Desktop Virtualization. CEGEKA Education corsi di formazione professionale
 CORSO MOC10324: Implementing and Managing Microsoft Desktop Virtualization CEGEKA Education corsi di formazione professionale Implementing and Managing Microsoft Desktop Virtualization This five-day, instructor-led
CORSO MOC10324: Implementing and Managing Microsoft Desktop Virtualization CEGEKA Education corsi di formazione professionale Implementing and Managing Microsoft Desktop Virtualization This five-day, instructor-led
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Gaussian filters Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian filters Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Una storia italiana: Dal Banco Ambrosiano a Intesa Sanpaolo (Italian Edition)
") Una storia italiana: Dal Banco Ambrosiano a Intesa Sanpaolo (Italian Edition) Carlo Bellavite Pellegrini Click here if your download doesn"t start automatically Una storia italiana: Dal Banco Ambrosiano
Una storia italiana: Dal Banco Ambrosiano a Intesa Sanpaolo (Italian Edition) Carlo Bellavite Pellegrini Click here if your download doesn"t start automatically Una storia italiana: Dal Banco Ambrosiano
Esempio con Google Play tore Example with Google Play tore
 Guida all installazione ed uso dell App VR Tour Camerata Picena Per installare l App occorre aprire lo Store del vostro smartphone (Play Store o App Store) e cercare l App con parola chiave Camerata Picena.
Guida all installazione ed uso dell App VR Tour Camerata Picena Per installare l App occorre aprire lo Store del vostro smartphone (Play Store o App Store) e cercare l App con parola chiave Camerata Picena.
Concorso Allievi Marescialli Carabinieri Corso Triennale... Download Concorso Allievi Marescialli Arma Dei Carabinieri...
 Concorso Allievi Marescialli Arma Dei Carabinieri Teoria E Test Manuale Di Completamento Per Le Prove Concorsuali Con Contenuto Digitale Per Accesso On Line We have made it easy for you to find a PDF Ebooks
Concorso Allievi Marescialli Arma Dei Carabinieri Teoria E Test Manuale Di Completamento Per Le Prove Concorsuali Con Contenuto Digitale Per Accesso On Line We have made it easy for you to find a PDF Ebooks
Capitolo 1. Introduzione. Cay S. Horstmann Concetti di informatica e fondamenti di Java
 Capitolo 1 Introduzione Cay S. Horstmann Concetti di informatica e fondamenti di Java Obiettivi del capitolo Comprendere la distinzione fra linguaggi macchina e linguaggi di programmazione di alto livello
Capitolo 1 Introduzione Cay S. Horstmann Concetti di informatica e fondamenti di Java Obiettivi del capitolo Comprendere la distinzione fra linguaggi macchina e linguaggi di programmazione di alto livello
La questione dei Multiple Comparisons
 La questione dei Multiple Comparisons Massimo Borelli May 7, 2014 Massimo Borelli () La questione dei Multiple Comparisons May 7, 2014 1 / 27 Contenuti 1 Un errore tanto grave quanto frequente 2 i vantaggi
La questione dei Multiple Comparisons Massimo Borelli May 7, 2014 Massimo Borelli () La questione dei Multiple Comparisons May 7, 2014 1 / 27 Contenuti 1 Un errore tanto grave quanto frequente 2 i vantaggi
6.5 RNA Secondary Structure. 18 novembre 2014
 6.5 RNA Secondary Structure 18 novembre 2014 Calendario Oggi è la lezione 17/24: ultima lezione su Programmazione dinamica Metodo greedy: 18, 19 Grafi: 20, 21, 22, 23 Reti di flusso: 23, 24 (=mercoledì
6.5 RNA Secondary Structure 18 novembre 2014 Calendario Oggi è la lezione 17/24: ultima lezione su Programmazione dinamica Metodo greedy: 18, 19 Grafi: 20, 21, 22, 23 Reti di flusso: 23, 24 (=mercoledì
50 Ricette Per La Pesistica E La Definizione Del Muscolo Alto Contenuto Proteico In Ogni Frullato
 50 Ricette Per La Pesistica E La Definizione Del Muscolo Alto Contenuto Proteico In Ogni Frullato We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks
50 Ricette Per La Pesistica E La Definizione Del Muscolo Alto Contenuto Proteico In Ogni Frullato We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks
ROS Robot Operating System. Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 ROS Robot Operating System Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tutorials [online] http://wiki.ros.org/ [2014] Jason M. O Kane A Gentle Introduction to ROS https://cse.sc.edu/~jokane/agitr/agitr-letter.pdf
ROS Robot Operating System Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tutorials [online] http://wiki.ros.org/ [2014] Jason M. O Kane A Gentle Introduction to ROS https://cse.sc.edu/~jokane/agitr/agitr-letter.pdf
Gestire La Sicurezza Sul Lavoro
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with gestire la sicurezza
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with gestire la sicurezza
1) Collegarsi al sito FTP Scuola cliccando qui: ftp://ftp-scuola2000.local Connect to the follwig web site: ftp://ftp-scuola2000.
 Collegarsi al sito FTP Scuola cliccando qui: ftp://ftp-scuola2000.local Connect to the follwig web site: ftp://ftp-scuola2000.") Istruzioni per il download di CRSP 1925 US Stock Database utenti istituzionali - Download instructions for CRSP 1925 US Stock Database institutional users Le seguenti istruzioni di installazione del client
Istruzioni per il download di CRSP 1925 US Stock Database utenti istituzionali - Download instructions for CRSP 1925 US Stock Database institutional users Le seguenti istruzioni di installazione del client
GstarCAD 2010 Features
 GstarCAD 2010 Features Unrivaled Compatibility with AutoCAD-Without data loss&re-learning cost Support AutoCAD R2.5~2010 GstarCAD 2010 uses the latest ODA library and can open AutoCAD R2.5~2010 DWG file.
GstarCAD 2010 Features Unrivaled Compatibility with AutoCAD-Without data loss&re-learning cost Support AutoCAD R2.5~2010 GstarCAD 2010 uses the latest ODA library and can open AutoCAD R2.5~2010 DWG file.
La fuggitiva (Emozioni senza tempo) (Italian Edition)
 (Italian Edition)") La fuggitiva (Emozioni senza tempo) (Italian Edition) Marcel Proust, Adriana Latour (traduttore) Click here if your download doesn"t start automatically La fuggitiva (Emozioni senza tempo) (Italian Edition)
La fuggitiva (Emozioni senza tempo) (Italian Edition) Marcel Proust, Adriana Latour (traduttore) Click here if your download doesn"t start automatically La fuggitiva (Emozioni senza tempo) (Italian Edition)
Modelli Finanziari La Finanza Con Excel Con Aggiornamento Online
 Modelli Finanziari La Finanza Con Excel Con Aggiornamento Online We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your
Modelli Finanziari La Finanza Con Excel Con Aggiornamento Online We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your
Corso Di Elettrotecnica Ed Elettronica Per Larticolazione Elettrotecnica
 Corso Di Elettrotecnica Ed Elettronica Per Larticolazione Elettrotecnica We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it
Corso Di Elettrotecnica Ed Elettronica Per Larticolazione Elettrotecnica We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it
APP INVENTOR 2 CON DATABASE MYSQL (ITALIAN EDITION) BY ANTONIO TACCETTI
 BY ANTONIO TACCETTI") Read Online and Download Ebook APP INVENTOR 2 CON DATABASE MYSQL (ITALIAN EDITION) BY ANTONIO TACCETTI DOWNLOAD EBOOK : APP INVENTOR 2 CON DATABASE MYSQL (ITALIAN Click link bellow and free register to
Read Online and Download Ebook APP INVENTOR 2 CON DATABASE MYSQL (ITALIAN EDITION) BY ANTONIO TACCETTI DOWNLOAD EBOOK : APP INVENTOR 2 CON DATABASE MYSQL (ITALIAN Click link bellow and free register to
Ansia e Attacchi di Panico - Breve Corso di Auto- Terapia per Risolvere il Problema (Italian Edition)
") Ansia e Attacchi di Panico - Breve Corso di Auto- Terapia per Risolvere il Problema (Italian Edition) Click here if your download doesn"t start automatically Ansia e Attacchi di Panico - Breve Corso di
Ansia e Attacchi di Panico - Breve Corso di Auto- Terapia per Risolvere il Problema (Italian Edition) Click here if your download doesn"t start automatically Ansia e Attacchi di Panico - Breve Corso di
Viaggio di un naturalista intorno al mondo (Viaggi e Viaggiatori) (Italian Edition)
 (Italian Edition)") Viaggio di un naturalista intorno al mondo (Viaggi e Viaggiatori) (Italian Edition) Charles Darwin Click here if your download doesn"t start automatically Viaggio di un naturalista intorno al mondo (Viaggi
Viaggio di un naturalista intorno al mondo (Viaggi e Viaggiatori) (Italian Edition) Charles Darwin Click here if your download doesn"t start automatically Viaggio di un naturalista intorno al mondo (Viaggi
I Test Dei Concorsi Per Tecnico Di Laboratorio Biomedico Guida Completa Alla Preparazione Di Test Preselettivi E Prove Pratiche Per Tslb
 I Test Dei Concorsi Per Tecnico Di Laboratorio Biomedico Guida Completa Alla Preparazione Di Test Preselettivi E We have made it easy for you to find a PDF Ebooks without any digging. And by having access
I Test Dei Concorsi Per Tecnico Di Laboratorio Biomedico Guida Completa Alla Preparazione Di Test Preselettivi E We have made it easy for you to find a PDF Ebooks without any digging. And by having access
Modelli di Moto. Incertezza nel movimento Modello Probabilistico Filtro Bayesiano
 Modelli di Moto Incertezza nel movimento Modello Probabilistico Filtro Bayesiano Un modello possibile sono le reti bayesiane Azioni, Osservazioni, Transizioni Localizzazione: Tassonomia Locale vs Globale:
Modelli di Moto Incertezza nel movimento Modello Probabilistico Filtro Bayesiano Un modello possibile sono le reti bayesiane Azioni, Osservazioni, Transizioni Localizzazione: Tassonomia Locale vs Globale:
Leader Di Te Stesso Come Sfruttare Al Meglio Il Tuo Potenziale Per Migliorare La Qualit Della Tua Vita Personale E Professionale
 Leader Di Te Stesso Come Sfruttare Al Meglio Il Tuo Potenziale Per Migliorare La Qualit Della Tua Vita Personale We have made it easy for you to find a PDF Ebooks without any digging. And by having access
Leader Di Te Stesso Come Sfruttare Al Meglio Il Tuo Potenziale Per Migliorare La Qualit Della Tua Vita Personale We have made it easy for you to find a PDF Ebooks without any digging. And by having access
APERIO. Dinamico e discreto, Aperio è luce in movimento. Design by: A++
 APERIO Dinamico e discreto, Aperio è luce in movimento. Aperio rappresenta il più moderno contributo all illuminazione d interni. Il suo alto contenuto tecnologico, l importanza delle sue dimensioni (oltre
APERIO Dinamico e discreto, Aperio è luce in movimento. Aperio rappresenta il più moderno contributo all illuminazione d interni. Il suo alto contenuto tecnologico, l importanza delle sue dimensioni (oltre
Il Grande Libro Dei Sogni Per Conoscerne Il Significato Interpretarne I Simboli E Scoprire Le Corrispondenze Con I Numeri Del Lotto
 Il Grande Libro Dei Sogni Per Conoscerne Il Significato Interpretarne I Simboli E Scoprire Le Corrispondenze Con I We have made it easy for you to find a PDF Ebooks without any digging. And by having access
Il Grande Libro Dei Sogni Per Conoscerne Il Significato Interpretarne I Simboli E Scoprire Le Corrispondenze Con I We have made it easy for you to find a PDF Ebooks without any digging. And by having access
Esercizi Di Macchine Elettriche Temi Di Elettrotecnica Dettagliatamente Svolti
 Esercizi Di Macchine Elettriche Temi Di Elettrotecnica Dettagliatamente Svolti We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing
Esercizi Di Macchine Elettriche Temi Di Elettrotecnica Dettagliatamente Svolti We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing
Piano Operativo Di Sicurezza Pos Za Daniele Cortis
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with piano operativo di sicurezza
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with piano operativo di sicurezza
Esercizi Svolti Di Matematica Vettori File Type
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with esercizi svolti di matematica
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with esercizi svolti di matematica
Obiettivo Esame Di Terza Media Temi Svolti Tesine Multidisciplinari Prove Invalsi Con Risposte Commentate
 Obiettivo Esame Di Terza Media Temi Svolti Tesine Multidisciplinari Prove Invalsi Con Risposte Commentate We have made it easy for you to find a PDF Ebooks without any digging. And by having access to
Obiettivo Esame Di Terza Media Temi Svolti Tesine Multidisciplinari Prove Invalsi Con Risposte Commentate We have made it easy for you to find a PDF Ebooks without any digging. And by having access to
 Rif. 1122 Lionard Luxury Real Estate Via dei Banchi, 6 - ang. Piazza S. Maria Novella 50123 Florence Italy Tel. +39 055 0548100 Fax. +39 055 0548150 Amalfi Coast Luxury Villa for Sale on the Amalfi Coast
Rif. 1122 Lionard Luxury Real Estate Via dei Banchi, 6 - ang. Piazza S. Maria Novella 50123 Florence Italy Tel. +39 055 0548100 Fax. +39 055 0548150 Amalfi Coast Luxury Villa for Sale on the Amalfi Coast