La gestione del clock in Minix
|
|
|
- Luigina Corsi
- 4 anni fa
- Visualizzazioni
Transcript
1 La gestione del clock in Minix Sistemi Operativi Lez. 29 1
2 La periferica Il cristallo di quarzo sottoposto a tensione genera un segnale con frequenza che varia da 5 a 200 MHz Ad ogni ciclo il contatore viene decrementato quando raggiunge il valore zero: La periferica invia un Interrupt HW (IRQ 8) Il contatore viene re-inizializzato L intervallo di tempo che intercorre tra un interrupt ed il successivo è denominato clock tick 2
3 Esempio Un clock chip che contiene un contatore a 16 bit ed un cristallo che genera segnali a 5 MHz, genererà clock tick della durata compresa tra 0,2 microsecondi e 13,1 millisecondi E se il clock è a 100 Mhz? Solitamente all interno di un PC esistono più chip di clock programmabili I chip di clock usati per la sincronizzazione di CPU e BUS di sistema usano circuiti diversi da quelli usati per la gestione degli eventi 3
4 Funzionalità svolte Time of the day: solitamente ottenuto memorizzando il numero di secondi (in termini di tick) trascorsi a partire dal 1/01/1970 4
5 Funzionalità svolte Segnalare la terminazione dei quanti di tempo: i quanti di tempo sono definiti in termini di tick ad ogni interrupt di clock si decrementa il quanto di 1 Accounting per l uso della CPU 5
6 Funzionalità svolte Gestire segnali a tempo per conto dei processi eseguiti dal sistema: alcuni processi basano le loro azioni sull avverarsi o meno di certi eventi, entro intervalli di tempo predeterminati (es. ack di TCP) 6
7 Funzionalità svolte Watchdog timers: simili ai precedenti, con la differenza che allo scadere del tempo prefissato invece di inviare segnali richiamano opportune procedure di gestione Profiling: raccogliere i tempi di esecuzione di diverse componenti del sistema o dei processi utente 7
8 Implementazione Le componenti del sistema operativo coinvolte nella gestione del clock sono: Interrupt handler Clock driver (clock task) Che si appoggia su do_clocktick per svolgere le operazioni richieste Routine di servizio: leggere il clock, leggere l ora del sistema, leggere dei registri all interno del chip 8
9 Driver È la prima componente che si occupa del clock ad essere eseguita sul sistema e quindi deve provvedere alla inizializzazione del dispositivo Viene avviata in fase di boot Costituita da un loop infinito che riceve solo un tipo di messaggi provenienti da HARD_INT e generati dall interrupt handler 9

10 Clock driver 10
, dopo 16,67")
11 init_clock() clock_hook.proc_nr_e = CLOCK; Terminata l esecuzione di init_clock(), dopo 16,67 millisecondi arriverà il primo clock interrupt 11
12 irq_handlers [nr_irq_hook] irq_hook_t irq_hook_t irq_hook_t irq_hook_t 12
13 Strutture dati: irq_hook_t STRUTTURA DATI DI RIFERIMENTO PER LA GESTIONE DEGLI INTERRUPT, ESISTE ALMENO UN ELEMENTO irq_hook_t PER OGNI TIPO DI INTERRUPT *HANDLER n.ro IRQ hook_id pid driver policy next Generic handler 13
14 Strutture dati Minix typedef unsigned long irq_policy_t; typedef unsigned long irq_id_t; typedef struct irq_hook { struct irq_hook *next; /* next hook in chain */ int (*handler)(struct irq_hook *); /* interrupt handler */ int irq; /* IRQ vector number */ int id; /* id of this hook */ int proc_nr_e; /* (endpoint) NONE if not in use */ irq_id_t notify_id; /* id to return on interrupt */ irq_policy_t policy; /* bit mask for policy */ } irq_hook_t; typedef int (*irq_handler_t)(struct irq_hook *); 14
15 00089 /*===========================================================================* * put_irq_handler * *===========================================================================*/ PUBLIC void put_irq_handler(hook, irq, handler) irq_hook_t *hook; int irq; irq_handler_t handler; { /* Register an interrupt handler. */ int id; irq_hook_t **line; if (irq < 0 irq >= NR_IRQ_VECTORS) panic("invalid call to put_irq_handler", irq); line = &irq_handlers[irq]; id = 1; while (*line!= NULL) { if (hook == *line) return; /* extra initialization */ line = &(*line)->next; id <<= 1; } if (id == 0) panic("too many handlers for irq", irq); hook->next = NULL; hook->handler = handler; hook->irq = irq; hook->id = id; *line = hook; irq_use = 1 << irq; } 15
 prevedendo eventuali lost_ticks, variabile globale")
16 interrupt_handler() Per prima cosa aggiorna realtime (n.ro di ticks trascorsi dal boot) prevedendo eventuali lost_ticks, variabile globale aggiornata da driver e interrupt handler 16
 addebita i tick al processo billable di")
17 interrupt_handler Aggiorna il PCB del processo nel caso di processo di sistema (quindi non billable) addebita i tick al processo billable di riferimento 17

18 interrupt_handler Nel caso di quanto terminato, o di watchdog timers scaduto viene richiamato il clock driver 18
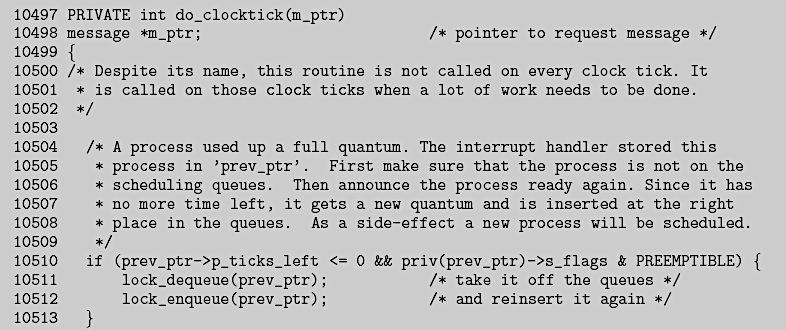
19 do_clocktick 19
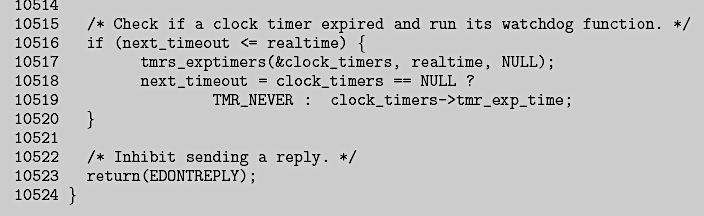
20 do_clocktick 20

21 Clock Service 21
Sistemi Operativi. Bruschi Martignoni Monga. La gestione del clock in MINIX Il clock Gestione clock MINIX Clock task IRQ Handler Message handler
 1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it Lezione XXII: a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo
1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it Lezione XXII: a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo
Sistemi Operativi 1. Mattia Monga. a.a. 2008/09. Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia
 1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
Gestione periferiche I/O
 Gestione periferiche I/O Compiti del sottosistema IO Nascondere al programmatore i dettagli delle interfacce hw e dei dispositivi (utilizzo di controllori) Omogeneizzare la gestione di dispositivi diversi
Gestione periferiche I/O Compiti del sottosistema IO Nascondere al programmatore i dettagli delle interfacce hw e dei dispositivi (utilizzo di controllori) Omogeneizzare la gestione di dispositivi diversi
Periferiche CPU. Misure e Sistemi Microelettronici Sistemi 6-1 SREG. Data Bus Address Bus Control Bus
 Periferiche Interface Interface Interface Interface CPU SREG CREG DREG Il processore scambia informazioni con le periferiche attraverso dei registri. Tipicamente: Control REGister; Status REGister; Data
Periferiche Interface Interface Interface Interface CPU SREG CREG DREG Il processore scambia informazioni con le periferiche attraverso dei registri. Tipicamente: Control REGister; Status REGister; Data
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi COMPITI
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi COMPITI
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA COMPITI DEL SOTTOSISTEMA DI I/O ARGOMENTI
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un di I/O 1. Nascondere al programmatore i dettagli delle interfacce
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un di I/O 1. Nascondere al programmatore i dettagli delle interfacce
Corso di programmazione Arduino DI MALVEZZI DAVIDE
 Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O COMPITI DEL SOTTOSISTEMA DI I/O 1. Nascondere
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O COMPITI DEL SOTTOSISTEMA DI I/O 1. Nascondere
Input/output. Sistemi Operativi Lez. 32. Corso: Sistemi Operativi Danilo Bruschi A.A. 2009/2010
 Input/output Sistemi Operativi Lez. 32 1 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/ interagisce con la realtà esterna Per ogni periferica collegata
Input/output Sistemi Operativi Lez. 32 1 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/ interagisce con la realtà esterna Per ogni periferica collegata
La gestione dei processi in Minix. Sistemi Operativi Lez. 12
 La gestione dei processi in Minix Sistemi Operativi Lez. 12 Scheduling Round robin su 16 code di priorità Quando un processo viene bloccato senza aver esaurito il suo quanto di tempo, una volta risvegliato,
La gestione dei processi in Minix Sistemi Operativi Lez. 12 Scheduling Round robin su 16 code di priorità Quando un processo viene bloccato senza aver esaurito il suo quanto di tempo, una volta risvegliato,
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA. Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Sistemi Operativi T AA 2011-2012 1 COMPITI DEL SOTTOSISTEMA
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Sistemi Operativi T AA 2011-2012 1 COMPITI DEL SOTTOSISTEMA
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA. Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O 1 COMPITI DEL SOTTOSISTEMA DI I/O 1. Nascondere al programmatore
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O 1 COMPITI DEL SOTTOSISTEMA DI I/O 1. Nascondere al programmatore
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA. Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Sistemi Operativi T AA 2011-2012 1 COMPITI DEL SOTTOSISTEMA
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Sistemi Operativi T AA 2011-2012 1 COMPITI DEL SOTTOSISTEMA
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA. Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Sistemi Operativi T AA 2011-2012 1 COMPITI DEL SOTTOSISTEMA
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Sistemi Operativi T AA 2011-2012 1 COMPITI DEL SOTTOSISTEMA
CONTATORE/TIMER PROGRAMMABILE CTC Z80 1. Piedinatura 2. Struttura interna 4. Modo timer 5. Modo Counter 8. Programmazione del CTC 13
 CONTATORE/TIMER PROGRAMMABILE CTC Z80 1 Piedinatura 2 Struttura interna 4 Modo timer 5 Modo Counter 8 Programmazione del CTC 13 Gerarchia di priorità delle interruzioni 17 Interfacciamento 17 Contatore/Timer
CONTATORE/TIMER PROGRAMMABILE CTC Z80 1 Piedinatura 2 Struttura interna 4 Modo timer 5 Modo Counter 8 Programmazione del CTC 13 Gerarchia di priorità delle interruzioni 17 Interfacciamento 17 Contatore/Timer
Input/output. Sistemi Operativi Lez. 32. Corso: Sistemi Operativi Danilo Bruschi A.A. 2011/2012
 Input/output Sistemi Operativi Lez. 32 1 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/ interagisce con la realtà esterna Per ogni periferica collegata
Input/output Sistemi Operativi Lez. 32 1 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/ interagisce con la realtà esterna Per ogni periferica collegata
Davide Gennaretti, Matteo Nicolini
 Seminario sui Microcontrollori Davide Gennaretti, Matteo Nicolini AA 2003-04 II Facoltà di Ingegneria Elettronica Cesena Cosa sono i microcontrollori? Piccoli computer concentrati in un chip Un Datapath
Seminario sui Microcontrollori Davide Gennaretti, Matteo Nicolini AA 2003-04 II Facoltà di Ingegneria Elettronica Cesena Cosa sono i microcontrollori? Piccoli computer concentrati in un chip Un Datapath
Il sistema delle interruzioni nel processore MC68000 (cenni)
") Corso di Calcolatori Elettronici I A.A. 2011-2012 Il sistema delle interruzioni nel processore MC68000 (cenni) Lezione 33 Prof. Antonio Pescapè Università degli Studi di Napoli Federico II Facoltà di Ingegneria
Corso di Calcolatori Elettronici I A.A. 2011-2012 Il sistema delle interruzioni nel processore MC68000 (cenni) Lezione 33 Prof. Antonio Pescapè Università degli Studi di Napoli Federico II Facoltà di Ingegneria
Sistemi Operativi. Bruschi Martignoni Monga. La gestione. Concetti generali Comandi Interrupt Pila sw Deadlock Gestione dei deadlock
 1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it Lezione XXVI: a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo
1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it Lezione XXVI: a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo
Architettura del calcolatore (Seconda parte)
") Architettura del calcolatore (Seconda parte) Ingegneria Meccanica e dei Materiali Università degli Studi di Brescia Prof. Massimiliano Giacomin LINGUAGGIO E ORGANIZZAZIONE DEL CALCOLATORE Linguaggio assembly
Architettura del calcolatore (Seconda parte) Ingegneria Meccanica e dei Materiali Università degli Studi di Brescia Prof. Massimiliano Giacomin LINGUAGGIO E ORGANIZZAZIONE DEL CALCOLATORE Linguaggio assembly
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi COMPITI
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi COMPITI
Componenti principali
 Componenti e connessioni Capitolo 3 Componenti principali n CPU (Unità Centrale di Elaborazione) n Memoria n Sistemi di I/O n Connessioni tra loro Architettura di Von Neumann n Dati e instruzioni in memoria
Componenti e connessioni Capitolo 3 Componenti principali n CPU (Unità Centrale di Elaborazione) n Memoria n Sistemi di I/O n Connessioni tra loro Architettura di Von Neumann n Dati e instruzioni in memoria
Input/output. Sistemi Operativi Lez. 11. Corso: Sistemi Operativi Danilo Bruschi A.A. 2013/2014
 Input/output Sistemi Operativi Lez. 11 1 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/ interagisce con la realtà esterna Per ogni periferica collegata
Input/output Sistemi Operativi Lez. 11 1 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/ interagisce con la realtà esterna Per ogni periferica collegata
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA COMPITI DEL SOTTOSISTEMA DI I/O ARGOMENTI
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi COMPITI
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi COMPITI
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo. Classificazione. I microcontrollori
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione General Purpose CISC
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione General Purpose CISC
Architettura dei sistemi di elaborazione (Input/Output parte 2)
") Architettura dei sistemi di elaborazione (Input/Output parte 2) Gestione dell I/O Il processore può comunicare con uno o più dispositivi esterni secondo schemi temporali imprevedibili che dipendono dalle
Architettura dei sistemi di elaborazione (Input/Output parte 2) Gestione dell I/O Il processore può comunicare con uno o più dispositivi esterni secondo schemi temporali imprevedibili che dipendono dalle
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione di unità disco COMPITI DEL SOTTOSISTEMA
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione di unità disco COMPITI DEL SOTTOSISTEMA
Componenti principali. Programma cablato. Architettura di Von Neumann. Programma cablato. Cos e un programma? Componenti e connessioni
 Componenti principali Componenti e connessioni Capitolo 3 CPU (Unita Centrale di Elaborazione) Memoria Sistemi di I/O Connessioni tra loro 1 2 Architettura di Von Neumann Dati e instruzioni in memoria
Componenti principali Componenti e connessioni Capitolo 3 CPU (Unita Centrale di Elaborazione) Memoria Sistemi di I/O Connessioni tra loro 1 2 Architettura di Von Neumann Dati e instruzioni in memoria
Componenti e connessioni. Capitolo 3
 Componenti e connessioni Capitolo 3 Componenti principali CPU (Unità Centrale di Elaborazione) Memoria Sistemi di I/O Connessioni tra loro Architettura di Von Neumann Dati e instruzioni in memoria (lettura
Componenti e connessioni Capitolo 3 Componenti principali CPU (Unità Centrale di Elaborazione) Memoria Sistemi di I/O Connessioni tra loro Architettura di Von Neumann Dati e instruzioni in memoria (lettura
Chiamata di procedura remota
 Con gli strumenti gia` visti, si puo` realizzare come segue: lato chiamante: send asincrona immediatamente seguita da una receive lato chiamato: una receive seguita, al termine dell azione richiesta, da
Con gli strumenti gia` visti, si puo` realizzare come segue: lato chiamante: send asincrona immediatamente seguita da una receive lato chiamato: una receive seguita, al termine dell azione richiesta, da
L architettura del calcolatore (Seconda parte)
") L architettura del calcolatore (Seconda parte) Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin ORGANIZZAZIONE DEL CALCOLATORE: RICHIAMI
L architettura del calcolatore (Seconda parte) Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin ORGANIZZAZIONE DEL CALCOLATORE: RICHIAMI
Sistemi Operativi. Bruschi Martignoni Monga. La gestione. MINIX Architettura I device driver Block device. Memory driver Implementazione
 1 Mattia Lezione XXVII: Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso
1 Mattia Lezione XXVII: Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso
Chiamata di procedura remota
 Chiamata di procedura remota Meccanismo di comunicazione e sincronizzazione tra processi in cui un processo che richiede un servizio ad un altro processo rimane sospeso fino al completamento del servizio
Chiamata di procedura remota Meccanismo di comunicazione e sincronizzazione tra processi in cui un processo che richiede un servizio ad un altro processo rimane sospeso fino al completamento del servizio
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione Processori
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione Processori
Struttura dei Sistemi di Calcolo
 Struttura dei Sistemi di Calcolo Operazioni dei sistemi di calcolo Struttura dell I/O Struttura della memoria Gerarchia delle memorie Protezione hardware Invocazione del Sistema Operativo 1 Architettura
Struttura dei Sistemi di Calcolo Operazioni dei sistemi di calcolo Struttura dell I/O Struttura della memoria Gerarchia delle memorie Protezione hardware Invocazione del Sistema Operativo 1 Architettura
La gestione dei processi in Minix
 La gestione dei processi in Minix Sistemi Operativi Lez. 28 Scheduling Round robin su 16 code di priorità Quando un processo viene bloccato senza aver esaurito il suo quanto di tempo, una volta risvegliato,
La gestione dei processi in Minix Sistemi Operativi Lez. 28 Scheduling Round robin su 16 code di priorità Quando un processo viene bloccato senza aver esaurito il suo quanto di tempo, una volta risvegliato,
Sistemi a microprocessore
 Sistemi a microprocessore Programma: Segnali analogici e digitali Uso di segnali digitali per la rappresentazione dei numeri interi La memoria e la CPU I programmi in linguaggio macchina La connessione
Sistemi a microprocessore Programma: Segnali analogici e digitali Uso di segnali digitali per la rappresentazione dei numeri interi La memoria e la CPU I programmi in linguaggio macchina La connessione
Sistemi Operativi 1. Lezione III: Concetti fondamentali. Mattia Monga. 7 marzo 2008
 1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 7 marzo 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 7 marzo 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
Sistemi Operativi 1. Mattia Monga. 7 marzo Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia
 1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 7 marzo 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 7 marzo 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
Trasparenze del Corso di Sistemi Operativi
 Università di Udine Facoltà di Scienze MM.FF.NN. Laurea in Informatica A.A. 2018/19 Trasparenze del Corso di Sistemi Operativi Marina Lenisa Università di Udine Copyright c 2000-04 Marino Miculan (miculan@dimi.uniud.it)
Università di Udine Facoltà di Scienze MM.FF.NN. Laurea in Informatica A.A. 2018/19 Trasparenze del Corso di Sistemi Operativi Marina Lenisa Università di Udine Copyright c 2000-04 Marino Miculan (miculan@dimi.uniud.it)
Interruzioni parte prima. Inquadramento del problema
 Corso di Calcolatori Elettronici I A.A. 2010-2011 Interruzioni parte prima Lezione 32 Prof. Roberto Canonico Università degli Studi di Napoli Federico II Facoltà di Ingegneria Corso di Laurea in Ingegneria
Corso di Calcolatori Elettronici I A.A. 2010-2011 Interruzioni parte prima Lezione 32 Prof. Roberto Canonico Università degli Studi di Napoli Federico II Facoltà di Ingegneria Corso di Laurea in Ingegneria
Arduino Ciclo while, do while, for
 Arduino Ciclo while, do while, for I linguaggi di programmazione forniscono varie strutture di controllo che consentono percorsi di esecuzione più complicati. Una istruzione loop (ciclo) ci consente di
Arduino Ciclo while, do while, for I linguaggi di programmazione forniscono varie strutture di controllo che consentono percorsi di esecuzione più complicati. Una istruzione loop (ciclo) ci consente di
Il Theremin con il microcontrollore
 Il Theremin con il microcontrollore Possiamo costruire uno strumento simile al Theremin utilizzando un dispositivi programmabile come il microcontrollore e un sensore di distanza (ultrasuoni). A secondo
Il Theremin con il microcontrollore Possiamo costruire uno strumento simile al Theremin utilizzando un dispositivi programmabile come il microcontrollore e un sensore di distanza (ultrasuoni). A secondo
Gestione software Il meccanismo delle interruzioni - 3
 Il meccanismo delle interruzioni - 3 Il valore emesso sul canale dal controllore delle interruzioni designa il servizio richiesto alla CPU Tale valore è un indice nel vettore delle interruzioni, contenente
Il meccanismo delle interruzioni - 3 Il valore emesso sul canale dal controllore delle interruzioni designa il servizio richiesto alla CPU Tale valore è un indice nel vettore delle interruzioni, contenente
il Nucleo e la gestione dei processi
 il Nucleo e la gestione dei processi 1. Programmi, processi e risorse Differenza fra programmi e processi Il Programma rappresenta la descrizione del procedimento logico (algoritmo) che deve essere eseguito
il Nucleo e la gestione dei processi 1. Programmi, processi e risorse Differenza fra programmi e processi Il Programma rappresenta la descrizione del procedimento logico (algoritmo) che deve essere eseguito
Sistemi Operativi Anno Accademico 2011/2012. Segnali: Interrupt software per la gestione di eventi asincroni
 Anno Accademico 2011/2012 Segnali: Interrupt software per la gestione di eventi asincroni Concetto di segnale Un segnale è un interrupt software Un segnale può essere generato da un processo utente o dal
Anno Accademico 2011/2012 Segnali: Interrupt software per la gestione di eventi asincroni Concetto di segnale Un segnale è un interrupt software Un segnale può essere generato da un processo utente o dal
Interruzioni. Inquadramento del problema
 Corso di Calcolatori Elettronici I Interruzioni Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie dell Informazione Corso di Laurea
Corso di Calcolatori Elettronici I Interruzioni Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie dell Informazione Corso di Laurea
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI. Compiti del sottosistema di I/O
 GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi 1 COMPITI
GESTIONE DELLE PERIFERICHE D INGRESSO/USCITA ARGOMENTI Compiti del sottosistema di I/O Architettura del sottosistema di I/O Gestore di un dispositivo di I/O Gestione e organizzazione dei dischi 1 COMPITI
Il problema dello I/O e gli Interrupt. Appunti di Sistemi per la cl. 4 sez. D A cura del prof. Ing. Mario Catalano
 Il problema dello I/O e gli Interrupt Appunti di Sistemi per la cl. 4 sez. D A cura del prof. Ing. Mario Catalano Il Calcolatore e le periferiche Periferica Decodifica Indirizzi Circuiti di Controllo Registri
Il problema dello I/O e gli Interrupt Appunti di Sistemi per la cl. 4 sez. D A cura del prof. Ing. Mario Catalano Il Calcolatore e le periferiche Periferica Decodifica Indirizzi Circuiti di Controllo Registri
Input/output. Sistemi Operativi Lez.14. Corso: Sistemi Operativi Danilo Bruschi A.A. 2006/2007
 Input/output Sistemi Operativi Lez.14 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/interagisce con la realtà esterna Per ogni periferica collegata
Input/output Sistemi Operativi Lez.14 Ruolo del SO Le periferiche di I/O sono i dispositivi attraverso i quali un calcolatore scambia dati/interagisce con la realtà esterna Per ogni periferica collegata
Input/Output. Input/Output
 Massimo VIOLANTE Politecnico di Torino Dipartimento di Automatica e Informatica Sommario Organizzazione di sistema; Trasferimento dati; Gestione I/O. 2 M. Violante 1.1 Organizzazione di sistema Memoria
Massimo VIOLANTE Politecnico di Torino Dipartimento di Automatica e Informatica Sommario Organizzazione di sistema; Trasferimento dati; Gestione I/O. 2 M. Violante 1.1 Organizzazione di sistema Memoria
Pag. 1. Il Nucleo del sistema operativo (la gestione dei processi)
") shell Programmi utente Modo utente Il Nucleo del sistema operativo (la gestione dei processi) Interfaccia delle chiamate di sistema File system Gestione processi Device driver Gestione memoria HARDWARE
shell Programmi utente Modo utente Il Nucleo del sistema operativo (la gestione dei processi) Interfaccia delle chiamate di sistema File system Gestione processi Device driver Gestione memoria HARDWARE
Calcolatori Elettronici T Ingegneria Informatica 04 Interruzioni
 Calcolatori Elettronici T Ingegneria Informatica 04 Interruzioni Stefano Mattoccia Gestione eventi con una CPU: polling In un sistema a microprocessore è di fondamentale importanza poter gestire eventi
Calcolatori Elettronici T Ingegneria Informatica 04 Interruzioni Stefano Mattoccia Gestione eventi con una CPU: polling In un sistema a microprocessore è di fondamentale importanza poter gestire eventi
Signalling (IPC) Signalling (segnalazione)
 Signalling (segnalazione)") Signalling (IPC) Signalling (segnalazione) è un particolare tipo di Inter-Process Communications che permettere di sincronizzare dei processi spedendo e ricevendo dei messaggi minimali che informano dell'accadimento
Signalling (IPC) Signalling (segnalazione) è un particolare tipo di Inter-Process Communications che permettere di sincronizzare dei processi spedendo e ricevendo dei messaggi minimali che informano dell'accadimento
Lezione XII: La gestione delle eccezioni in MINIX
 1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 4 aprile 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 4 aprile 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
MAC1 Simulatore di Microprocessore
 MAC1 Simulatore di Microprocessore INTRODUZIONE Architettura del MAC-1 - Indirizzabilità della memoria a 16 bit ( 64 Kb) - Indirizzabilità diretta a 12 bit (limitata ai primi 4 Kb) - 16 registri a 16 bit
MAC1 Simulatore di Microprocessore INTRODUZIONE Architettura del MAC-1 - Indirizzabilità della memoria a 16 bit ( 64 Kb) - Indirizzabilità diretta a 12 bit (limitata ai primi 4 Kb) - 16 registri a 16 bit
Comunicazione con sincronizzazione estesa
 Comunicazione con sincronizzazione estesa 1 Chiamate di procedura remota e rendez-vous Chiamata di procedura remota Rendez vous Linguaggio ADA 2 Chiamata di operazione remota Meccanismo di comunicazione
Comunicazione con sincronizzazione estesa 1 Chiamate di procedura remota e rendez-vous Chiamata di procedura remota Rendez vous Linguaggio ADA 2 Chiamata di operazione remota Meccanismo di comunicazione
Informatica B a.a 2005/06 (Meccanici 4 squadra) PhD. Ing. Michele Folgheraiter
 PhD. Ing. Michele Folgheraiter") Informatica B a.a 2005/06 (Meccanici 4 squadra) Scaglione: da PO a ZZZZ PhD. Ing. Michele Folgheraiter Funzionamento macchina di von Neumann clock Memoria Centrale: Tutta l informazione prima di essere
Informatica B a.a 2005/06 (Meccanici 4 squadra) Scaglione: da PO a ZZZZ PhD. Ing. Michele Folgheraiter Funzionamento macchina di von Neumann clock Memoria Centrale: Tutta l informazione prima di essere
Struttura dei Sistemi di Calcolo
 Università di Udine Facoltà di Scienze MM.FF.NN. A.A. 2009-2010 Copyright c 2000 04 Marino Miculan (miculan@dimi.uniud.it) La copia letterale e la distribuzione di questa presentazione nella sua integrità
Università di Udine Facoltà di Scienze MM.FF.NN. A.A. 2009-2010 Copyright c 2000 04 Marino Miculan (miculan@dimi.uniud.it) La copia letterale e la distribuzione di questa presentazione nella sua integrità
Esercizio sulla gestione di file in Unix. Sistemi Operativi T AA
 Esercizio sulla gestione di file in Unix Sistemi Operativi T AA 2011-2012 1 Esercizio Si vuole realizzare un programma C che, utilizzando le system call di Unix, realizzi uno schema di comunicazione tra
Esercizio sulla gestione di file in Unix Sistemi Operativi T AA 2011-2012 1 Esercizio Si vuole realizzare un programma C che, utilizzando le system call di Unix, realizzi uno schema di comunicazione tra
LABORATORIO DI SISTEMI OPERATIVI
 LABORATORIO DI SISTEMI OPERATIVI Corso di Laurea Triennale in Ingegneria Informatica A.A. 2018/2019 Guglielmo Cola Email: g.cola@iet.unipi.it Web: iet.unipi.it/g.cola Processi in Unix/Linux (parte II)
LABORATORIO DI SISTEMI OPERATIVI Corso di Laurea Triennale in Ingegneria Informatica A.A. 2018/2019 Guglielmo Cola Email: g.cola@iet.unipi.it Web: iet.unipi.it/g.cola Processi in Unix/Linux (parte II)
Corso di Calcolatori Elettronici I. Interruzioni. Prof. Roberto Canonico
 Corso di Calcolatori Elettronici I Interruzioni Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie dell Informazione Corso di Laurea
Corso di Calcolatori Elettronici I Interruzioni Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie dell Informazione Corso di Laurea
Esercizio 1. Progettare la PO a partire dal microprogramma eseguibile e successivamente:
 Architettura degli Elaboratori Prima prova di verifica intermedia - A.A. 2014-2015 Riportare Nome, Cognome, Numero di matricola e Corso di appartenenza su tutti i fogli consegnati. I risultati saranno
Architettura degli Elaboratori Prima prova di verifica intermedia - A.A. 2014-2015 Riportare Nome, Cognome, Numero di matricola e Corso di appartenenza su tutti i fogli consegnati. I risultati saranno
Introduzione. Caratteristiche generali. Sistemi e Tecnologie per l'automazione LS. HW per elaborazione digitale in automazione: Microcontrollori e DSP
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Sistemi e Tecnologie per l'automazione LS. HW per elaborazione digitale in automazione: Microcontrollori e DSP
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Sistemi Operativi. Sistemi I/O SISTEMI DI INPUT/OUTPUT. Hardware di I/O. Interfaccia di I/O per le applicazioni. Sottosistema per l I/O del kernel
 SISTEMI DI INPUT/OUTPUT 10.1 Sistemi I/O Hardware di I/O Interfaccia di I/O per le applicazioni Sottosistema per l I/O del kernel Trasformazione delle richieste di I/O Stream Prestazioni 10.2 I/O Hardware
SISTEMI DI INPUT/OUTPUT 10.1 Sistemi I/O Hardware di I/O Interfaccia di I/O per le applicazioni Sottosistema per l I/O del kernel Trasformazione delle richieste di I/O Stream Prestazioni 10.2 I/O Hardware
Esercizio 1. Scrivere un programma C in cui: Il master thread:
 Scrivere un programma C in cui: Il master thread: Esercizio 1 Inizializza una variabile globale a=0 crea un thread produttore ed un thread consumatore. In un ciclo infinito visualizza il valore di a. Il
Scrivere un programma C in cui: Il master thread: Esercizio 1 Inizializza una variabile globale a=0 crea un thread produttore ed un thread consumatore. In un ciclo infinito visualizza il valore di a. Il
LA GESTIONE DELLA I/O
 LA GESTIONE DELLA I/O Il S.O. È l interfaccia tra l hardware e i programmi che effettuano richieste di I/O Sottosistema di I/O strutturato in moduli chiamati DRIVER uno per ogni dispositivo I Driver rendono
LA GESTIONE DELLA I/O Il S.O. È l interfaccia tra l hardware e i programmi che effettuano richieste di I/O Sottosistema di I/O strutturato in moduli chiamati DRIVER uno per ogni dispositivo I Driver rendono
Sistemi Operativi SISTEMI DI INPUT/OUTPUT. D. Talia - UNICAL. Sistemi Operativi 10.1
 SISTEMI DI INPUT/OUTPUT 10.1 Sistemi I/O Hardware di I/O Interfaccia di I/O per le applicazioni Sottosistema per l I/O del kernel Trasformazione delle richieste di I/O Stream Prestazioni 10.2 I/O Hardware
SISTEMI DI INPUT/OUTPUT 10.1 Sistemi I/O Hardware di I/O Interfaccia di I/O per le applicazioni Sottosistema per l I/O del kernel Trasformazione delle richieste di I/O Stream Prestazioni 10.2 I/O Hardware
Lezione E12. Sistemi operativi open-source, embedded e real-time
 Lezione E12 Sistemi operativi open-source, embedded e real-time 17 dicembre 2013 Dipartimento di Ingegneria Civile e Ingegneria Informatica Università degli Studi di Roma Tor Vergata SOSERT 13 E12.1 Di
Lezione E12 Sistemi operativi open-source, embedded e real-time 17 dicembre 2013 Dipartimento di Ingegneria Civile e Ingegneria Informatica Università degli Studi di Roma Tor Vergata SOSERT 13 E12.1 Di
Sistemi Operativi 1. Mattia Monga. a.a. 2008/09. Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia
 1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Mattia Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it a.a. 2008/09 1 c 2009 M.. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
C UDP in Windows p53 - variante 1
 // UDPclient.c C UDP in Windows p53 - variante 1 /* Testo del problema Il processo client invia la stringa "INVIAMI UN NUMERO" diverse volte in un intervallo di tempo di 1 secondo ad un processo server
// UDPclient.c C UDP in Windows p53 - variante 1 /* Testo del problema Il processo client invia la stringa "INVIAMI UN NUMERO" diverse volte in un intervallo di tempo di 1 secondo ad un processo server
Processi Aspetti avanzati. Terminazione Segnali
 Processi Aspetti avanzati Terminazione Segnali Inizializzazione e terminazione di un programma Dal punto di vista dell'utente, ogni programma "inizia" dalla funzione main() E' la prima funzione utente
Processi Aspetti avanzati Terminazione Segnali Inizializzazione e terminazione di un programma Dal punto di vista dell'utente, ogni programma "inizia" dalla funzione main() E' la prima funzione utente
Principali periferiche
 Principali periferiche Timer Periferica per il conteggio esatto del tempo Esempio: 8254 3 contatori "indietro" da 16 bit: si può impostare un valore iniziale fino a 0xFFFF in ciascuno dei tre contatori;
Principali periferiche Timer Periferica per il conteggio esatto del tempo Esempio: 8254 3 contatori "indietro" da 16 bit: si può impostare un valore iniziale fino a 0xFFFF in ciascuno dei tre contatori;
Sistemi Operativi. Lezione 3 Processi e Thread
 Lezione 3 Processi e Thread Introduzione Sino ai sistemi batch la CPU di un sistema svolgeva un attività, la portava a termine e solo allora avviava un altra attività Con l avvento della multiprogrammazione
Lezione 3 Processi e Thread Introduzione Sino ai sistemi batch la CPU di un sistema svolgeva un attività, la portava a termine e solo allora avviava un altra attività Con l avvento della multiprogrammazione
Sistemi di Elaborazione: esercizio con il D12
 Sistemi di Elaborazione: esercizio con il D12 Un sistema basato su PIC18F8720 a 24 MHz è dotato di 32 KB di EPROM agli indirizzi alti e 64 KB di RAM statica agli indirizzi bassi. Il sistema è dotato inoltre
Sistemi di Elaborazione: esercizio con il D12 Un sistema basato su PIC18F8720 a 24 MHz è dotato di 32 KB di EPROM agli indirizzi alti e 64 KB di RAM statica agli indirizzi bassi. Il sistema è dotato inoltre
Sistemi operativi. Lez. 9: primitive per la concorrenza i semafori
 Sistemi operativi Lez. 9: primitive per la concorrenza i semafori Disabilitazione interrupt Due processi possono trovarsi in sezione critica simultaneamente solo perché chi vi è entrato per primo è stato
Sistemi operativi Lez. 9: primitive per la concorrenza i semafori Disabilitazione interrupt Due processi possono trovarsi in sezione critica simultaneamente solo perché chi vi è entrato per primo è stato
Struttura di timekeeping. Francesco Famulari
 Struttura di timekeeping Francesco Famulari Argomenti Tutto il codice esaminato si riferisce al kernel vanilla Linux 3.9.4. Gli argomenti presentati sono: Passaggio alla nuova architettura del time system
Struttura di timekeeping Francesco Famulari Argomenti Tutto il codice esaminato si riferisce al kernel vanilla Linux 3.9.4. Gli argomenti presentati sono: Passaggio alla nuova architettura del time system
Il registratore digitale
 Il registratore digitale Nella pratica di laboratorio capita spesso di dover registrare segnali lentamente variabili per intervalli di tempo lunghi. Lo scopo della seconda esperienza è quello di realizzare
Il registratore digitale Nella pratica di laboratorio capita spesso di dover registrare segnali lentamente variabili per intervalli di tempo lunghi. Lo scopo della seconda esperienza è quello di realizzare
Informatica A (per gestionali) A.A. 2004/2005. Esercizi C e diagrammi a blocchi. Preparazione prima prova intermedia
 A.A. 2004/2005. Esercizi C e diagrammi a blocchi. Preparazione prima prova intermedia") Informatica A (per gestionali) A.A. 2004/2005 Esercizi C e diagrammi a blocchi Preparazione prima prova intermedia Indice 1 Array... 3 1.1 Filtraggio...3 1.2 Trasformazione...3 2 Struct e array... 5 2.1
Informatica A (per gestionali) A.A. 2004/2005 Esercizi C e diagrammi a blocchi Preparazione prima prova intermedia Indice 1 Array... 3 1.1 Filtraggio...3 1.2 Trasformazione...3 2 Struct e array... 5 2.1
Vogliamo far lampeggiare i led collegati come in figura ai bit della porta D del PIC 18F8722 presente sulla demo board in dotazione al laboratorio.
 Lampeggio di 8 led Vogliamo far lampeggiare i led collegati come in figura ai bit della porta D del PIC 18F8722 presente sulla demo board in dotazione al laboratorio. Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1
Lampeggio di 8 led Vogliamo far lampeggiare i led collegati come in figura ai bit della porta D del PIC 18F8722 presente sulla demo board in dotazione al laboratorio. Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1
Corso di Calcolatori Elettronici I Interruzioni ing. Alessandro Cilardo
 Corso di Calcolatori Elettronici I Interruzioni ing. Alessandro Cilardo Corso di Laurea in Ingegneria Biomedica Gestione di eventi Ciclo base del processore: le istruzioni sono eseguite una dopo l altra
Corso di Calcolatori Elettronici I Interruzioni ing. Alessandro Cilardo Corso di Laurea in Ingegneria Biomedica Gestione di eventi Ciclo base del processore: le istruzioni sono eseguite una dopo l altra
Sistemi Operativi (M. Cesati)
") Sistemi Operativi (M. Cesati) Compito scritto del 17 febbraio 2015 Nome: Matricola: Corso di laurea: Cognome: Crediti da conseguire: 5 6 9 Scrivere i dati richiesti in stampatello. Al termine consegnare
Sistemi Operativi (M. Cesati) Compito scritto del 17 febbraio 2015 Nome: Matricola: Corso di laurea: Cognome: Crediti da conseguire: 5 6 9 Scrivere i dati richiesti in stampatello. Al termine consegnare
Sincronizzazione. Soluzioni hardware Stefano Quer Dipartimento di Automatica e Informatica Politecnico di Torino
 Sincronizzazione Soluzioni hardware Stefano Quer Dipartimento di Automatica e Informatica Politecnico di Torino 2 Soluzioni hardware Le soluzioni hardware al problema della SC possono essere classificate
Sincronizzazione Soluzioni hardware Stefano Quer Dipartimento di Automatica e Informatica Politecnico di Torino 2 Soluzioni hardware Le soluzioni hardware al problema della SC possono essere classificate
Architettura del Calcolatore
 Giuseppe Manco Lezione 3 17 Ottobre 2003 Architettura del calcolatore Il calcolatore è uno strumento programmabile per la rappresentazione, la memorizzazione e l elaborazione delle informazioni un calcolatore
Giuseppe Manco Lezione 3 17 Ottobre 2003 Architettura del calcolatore Il calcolatore è uno strumento programmabile per la rappresentazione, la memorizzazione e l elaborazione delle informazioni un calcolatore
Laboratorio Informatica Classe 4A Serale Venerdì 18/02/2011. Gruppo. Cognome Riontino Nome Raffaele. Cognome Nome
 Laboratorio Informatica Classe 4A Serale Venerdì 18/02/2011 Gruppo Cognome Riontino Nome Raffaele Cognome Nome TRACCIA 2 ARGOMENTO: LISTE TEMPO: 4h 1. Utilizzando Typedef definire un nuovo tipo di dato
Laboratorio Informatica Classe 4A Serale Venerdì 18/02/2011 Gruppo Cognome Riontino Nome Raffaele Cognome Nome TRACCIA 2 ARGOMENTO: LISTE TEMPO: 4h 1. Utilizzando Typedef definire un nuovo tipo di dato
Lez. 4 Lo scheduling dei processi. Corso: Sistemi Operativi Danilo Bruschi
 Sistemi Operativi Lez. 4 Lo scheduling dei processi 1 Cicli d'elaborazione In ogni processo i burst di CPU si alternano con i tempi di I/O 2 Uso tipico di un calcolatore 3 CPU-bound e I/O-bound Processi
Sistemi Operativi Lez. 4 Lo scheduling dei processi 1 Cicli d'elaborazione In ogni processo i burst di CPU si alternano con i tempi di I/O 2 Uso tipico di un calcolatore 3 CPU-bound e I/O-bound Processi
PARTE 1 CONCETTI INTRODUTTIVI 2
 PARTE 1 CONCETTI INTRODUTTIVI 2 1.1 CHE COSA È UN S.O. 2 1.2 EVOLUZIONE STORICA DEI S.O. 2 1.2.1 SINGLE USER SYSTEMS 2 1.2.2 SISTEMI BATCH 2 1.2.3 SISTEMI TIME SHARING 3 1.2.4 SISTEMI REAL TIME 3 1.3 SISTEMI
PARTE 1 CONCETTI INTRODUTTIVI 2 1.1 CHE COSA È UN S.O. 2 1.2 EVOLUZIONE STORICA DEI S.O. 2 1.2.1 SINGLE USER SYSTEMS 2 1.2.2 SISTEMI BATCH 2 1.2.3 SISTEMI TIME SHARING 3 1.2.4 SISTEMI REAL TIME 3 1.3 SISTEMI
Variabili e Funzioni. Informatica 1 / 19
 Variabili e Funzioni Informatica 1 / 19 Programmi C e Un programma C e composto da funzioni e variabili Variabile: memorizza valori appartenenti ad un insieme di definizione (dipendente dal tipo) Funzione:
Variabili e Funzioni Informatica 1 / 19 Programmi C e Un programma C e composto da funzioni e variabili Variabile: memorizza valori appartenenti ad un insieme di definizione (dipendente dal tipo) Funzione:
Fondamenti di Informatica
 Esercizio 1. (3 punti) Fondamenti di Informatica PROVA SCRITTA 25 gennaio 2016 Data l istruzione assembler MIPS add $1,$2,$3, memorizzata all interno della memoria istruzioni della CPU, descrive la sua
Esercizio 1. (3 punti) Fondamenti di Informatica PROVA SCRITTA 25 gennaio 2016 Data l istruzione assembler MIPS add $1,$2,$3, memorizzata all interno della memoria istruzioni della CPU, descrive la sua
Segnali. Tecnica di comunicazione asincrona tra processi. Si può solo inviare uno tra un insieme fissato di segnali
 Segnali ed allarmi Segnali Tecnica di comunicazione asincrona tra processi Si può solo inviare uno tra un insieme fissato di segnali Il destinatario viene interrotto, e si salta ad una procedura specifica
Segnali ed allarmi Segnali Tecnica di comunicazione asincrona tra processi Si può solo inviare uno tra un insieme fissato di segnali Il destinatario viene interrotto, e si salta ad una procedura specifica
Sistemi Operativi (M. Cesati)
") Sistemi Operativi (M. Cesati) Compito scritto del 25 settembre 2014 Nome: Matricola: Corso di laurea: Cognome: Crediti da conseguire: 5 6 9 Scrivere i dati richiesti in stampatello. Al termine consegnare
Sistemi Operativi (M. Cesati) Compito scritto del 25 settembre 2014 Nome: Matricola: Corso di laurea: Cognome: Crediti da conseguire: 5 6 9 Scrivere i dati richiesti in stampatello. Al termine consegnare
Misure di intervalli temporali
 Misure di intervalli temporali Abbiamo visto che il computer ci mette a disposizione un orologio con la precisione di 1 µs (accessibile tramite la routine gettimeofday). Abbiamo usato questo orologio per
Misure di intervalli temporali Abbiamo visto che il computer ci mette a disposizione un orologio con la precisione di 1 µs (accessibile tramite la routine gettimeofday). Abbiamo usato questo orologio per
Lezione XXVII: La gestione dell I/O in MINIX
 1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 20 maggio 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 20 maggio 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
Sistemi Operativi 1. Mattia Monga. 20 maggio Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia
 1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 20 maggio 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
1 Dip. di Informatica e Comunicazione Università degli Studi di Milano, Italia mattia.monga@unimi.it 20 maggio 2008 1 c 2008 M. Monga. Creative Commons Attribuzione-Condividi allo stesso modo 2.5 Italia
Sistemi Operativi. La gestione delle risorse
 Sistemi Operativi La gestione delle risorse Introduzione Il sistema operativo ha il compito di fornire la gestione dell hardware ai programmi dell utente. Utente utilizza i programmi applicativi Programmi
Sistemi Operativi La gestione delle risorse Introduzione Il sistema operativo ha il compito di fornire la gestione dell hardware ai programmi dell utente. Utente utilizza i programmi applicativi Programmi
IL SISTEMA DELLE INTERRUZIONI
 IL SISTEMA DELLE INTERRUZIONI CORSO DI CALCOLATORI ELETTRONICI I CdL Ingegneria Elettronica (A-I) ICAR Consiglio Nazionale delle Ricerche DIS - Università degli Studi di Napoli Federico II Supporti didattici
IL SISTEMA DELLE INTERRUZIONI CORSO DI CALCOLATORI ELETTRONICI I CdL Ingegneria Elettronica (A-I) ICAR Consiglio Nazionale delle Ricerche DIS - Università degli Studi di Napoli Federico II Supporti didattici