Programmare LEGO NXT con Java
|
|
|
- Sergio Capelli
- 8 anni fa
- Visualizzazioni
Transcript
1 Programmare LEGO NXT con Java

2 Overview NXT Hardware Ambiente di sviluppo Eclipse Java Virtual Machine Programmare con JAVA

3 NXT hardware 4 Inputs (digitali e analogici) 3 Outputs (supporto per encoders) Schermo (100x64 pixels) 4 Bottoni Suono USB e Bluetooth
 4 Bottoni Suono USB e")
4 Processori Processore principale: Atmel 32-bit ARM processor, AT91SAM7S KB FLASH 64 KB RAM 48 MHz Co-processore: Atmel 8-bit AVR processor, ATmega48 4 KB FLASH 512 Byte RAM 8 MHz

5 Comunicazione tramite Bluetooth e USB Bluetooth wireless communication CSR BlueCoreTM 4 v2.0 +EDR System Supports the Serial Port Profile (SPP) Internal 47 KByte RAM External 8 MBit FLASH 26 MHz USB 2.0 Full speed com port (12 Mbit/s)

6 Monitor, Suono e bottoni Display in bianco e nero 100 x 64 pixel LCD Uscita audio con canale con risoluzione a 8-bit resolution 4 bottoni

7 Schema a blocchi del mattoncino intelligente

8 Qualche dettaglio 3 output con connessione a 6-fili che supportano anche l'input dagli encoder 4 input con connessione a 6-fili che supportano: - segnali digitali - segnali analogici - protocollo I2C - high speed port, IEC Type 4/EN LEGO ha distribuito tutta la documentazione

9 Documentazione online - cliccare sul bottone NXTreme button per informazioni e downloads per utenti avanzati Open source firmware!!! SDK Software Developer Kit HDK Hardware Developer Kit BDK Bluetooth Developer Kit

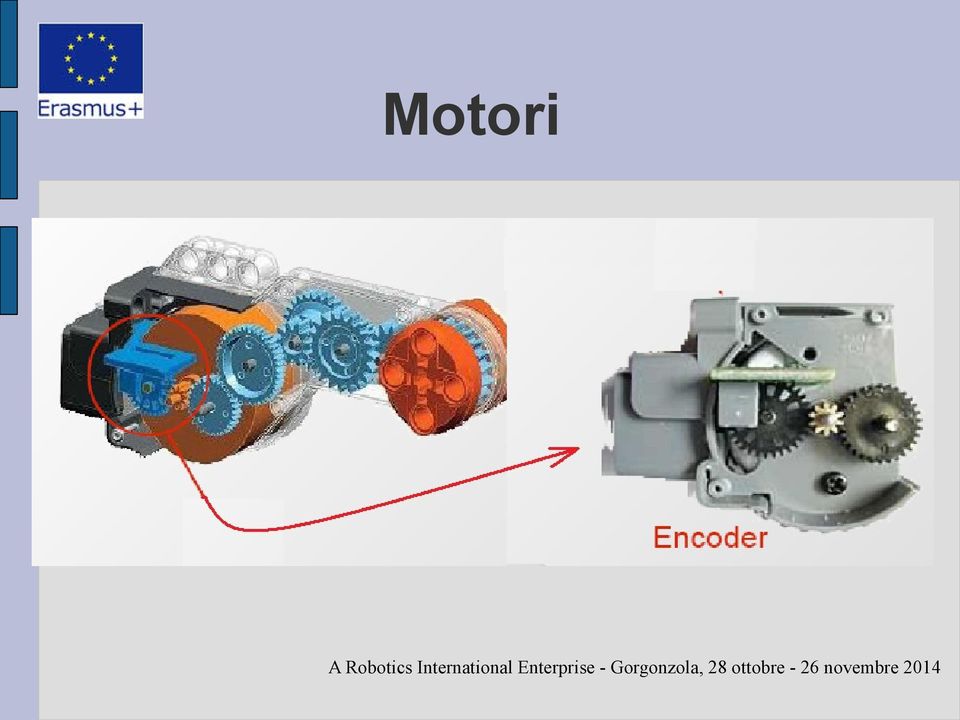
10 Motori Encoder integrato nel motore con sensibilità 1 Posizioni relative e non assolute Velocità massima pari a circa 200 RPM Coppia massima 24 Ncm Motori estremamente robusti

11 Motori
12 Sensori nel kit Sensore a ultrasuoni (3cm-100cm) Sensore di luce attivo Sensore acustico DB and DBA Sensore di contatto

 Schemi:")
13 Cavi di connessione I cavi LEGO NXT (come I connettori DEC RJ-12 ma al contrario) Schemi: Analog input
 Schemi:")
14 3 rd Party Sensors Prezzi da $30 a $50 HiTechnic ( Esteticamente simili ai sensori LEGO Autorizzati da LEGO MindSensors ( Compatibili ma meno curati esteticamente

15 HiTechnic Sensors Color Sensor Compass Sensor Acceleration Sensor More coming Prototype board Gyro sensor (analog, not I2C digital) IR Link (to talk to RCX and other LEGO IR devices) IR Seeker (for robo soccer, for example)
 IR Seeker (for robo")
16 MindSensors Sensors Acceleration Sensor RCX to NXT communications link PS2 controller interface Motor Multiplexor Magnetic Compass Pneumatic Pressure Sensor

17 Bluetooth Utilizzabile per scaricare i programmi Permette il trasferimento di dati da un NXT all'altro (fino a quattro collegati in rete) Permette il controllo a distanza da parte di qualsiasi dispositivo con BT

18 Linguaggi di programmazione NXT-G NXC e NBC (in ambiente BricX) Robot C pblua Java ed altri
 Robot C pblua")
19 NXT-G code Ambiente di sviluppo della LEGO Programmazione grafica Basato su National Instruments LabView Ottimo per programmi semplici Ideale per I ragazzi delle scuole medie inferiori ed elementari

20 NXC e NBC NXC (Not exactly C) è un linguaggio simile al C Costruito sull'assembler NBC, the Next Byte Code Utilizza il firmware standard della LEGO e un firmware potenziato

21 NXC in BricxCC BricxCC è un ambiente di sviluppo Supporta tutte le piattaforme LEGO E' opensource e compatibile anche con hardware non LEGO
22 Robot C Linguaggio di programmazione di Carnegie Mellon s per varie piattaforme (tra cui VEX, RCX e NXT) Firmware dedicato Costo30 $
23 Robot C Linguaggio di programmazione di Carnegie Mellon s per varie piattaforme (tra cui VEX, RCX e NXT) Firmware dedicato Costo30 $
24 pblua New firmware, and language Small portable language for embedded systems By Ralph Hemple, the author of pbforth for the RCX Compiles on brick! Use any terminal device to talk to it
25 Altri linguaggi Java MS Robotic Studio!!!!!!!!!! Si deve scaricare un piccolo programma client Il controllo reale è fatto dal PC
26 Programmare con Java Linguaggio orientato agli oggetti Senza fare un corso sul linguaggio cercheremo subito di: Utilizzare i motori Acquisire dati dai sensori
27 Link utili
28 La rivoluzione di Java - permette la realizzazione di programmi non legati ad una architettura precisa - Macchina Virtuale (JVM), i programmi non vengono compilati in codice macchina (nativo) ma in un codice intermedio chiamato bytecode - JVM e JDK
29 Architettura JVM
30 Paradigma della OOP Entità fondamentale è la classe, contenente: - lo stato, cioè i campi dell oggetto; - le procedure per la gestione, i metodi. Incapsulamento, ereditarietà

31 Classi e Oggetti
32 Un problema...
33 La soluzione Nel package navigation c'è la classe differentialpilot DifferentialPilot(float wheeldiameter, float trackwidth, Motor leftmotor, Motor rightmotor)
34 Esempio di oggetto
35 LEJOS lejos è una VM Java ridotta per l'nxt lejos NXJ offre: Object oriented language (Java) Preemptive threads (tasks) Arrays, including multi-dimensional Recursion Synchronization Exceptions Java types including float, long, and String Most of the java.lang, java.util and java.io classes A Well-documented Robotics API
36 Il NOSTRO riferimento
37 Installazione in window Oppure dalla cartella sul desktop: - fantom driver - jdk - Lejos - Eclipse
38 Trasferire il firmware nell'nxt htm
39 Il primo programma import lejos.nxt.button; public class HelloWorld { public static void main (String[] args) { System.out.println("Hello World"); Button.waitForAnyPress(); } }
40 Per fortuna abbiamo Eclipse
41 Controllo dei motori I nostri motori sono a corrente continua dotato di due morsetti, la velocità e il verso di rotazione dell'albero dipendono da: - tensione applicata - corrente assorbita dal rotore - carico applicato
42 Struttura dei motori DC la corrente scorre negli avvolgimenti e si genera un campo magnetico la parte sinistra del rotore è respinta dal magnete di sinistra ed attirata da quello di destra. la coppia genera la rotazione
43 Struttura dei motori DC quando gli avvolgimenti si allineano orizzontalmente, il commutatore inverte la direzione di corrente attraverso gli avvolgimenti, modificando il campo magnetico; il processo ritorna quindi allo stato di partenza e il ciclo si ripete (
44 Controllo PWM dei motori DC Modulazione di larghezza di impulso, dall'inglese pulse-width modulation onda quadra di duty cycle variabile che permette di controllare la potenza assorbita da un carico elettrico
45 Controllo dei motori dell'nxt i connettori sono a sei fili. controllo degli attuatori con segnali PWM alla tensione di 4,3 V e con correnti da 700 ma fino a 1 A valore di picco il motore è anche equipaggiato con una protezione termica interna due collegamenti per le informazioni provenienti dal decoder integrato nel motore
46 Controllo software dei motori htm
47 La classe NXTRegulatedMotor Ha tre istanze, una per ogni motore e i seguenti metodi principali: - forward(), backward(), stop() - gettachocount(), setspeed(int speed), Delay - rotate(int angle), rotateto(int angle) - rotaterotate(int angle,boolean immediatereturn), rotateto(int angle,booleanimmediatereturn), (boolean)isrotating()
48 Primi esempi di gestione motori Per un uso di base Per utilizzare l'encoder. Gestione della rotazione, inerzia e freno. Esecuzione rotazione in un thread Regolazione della velocità

49 Il primo programma
50 Cosa usare

51 La soluzione

52 Controllo software dei motori
53 Altri metodi della classe NXTRegulatedMotor boolean ismoving(); int getlimitangle() int getspeed() int getactualspeed() boolean isstalled() resettachocount() void setacceleration(int acceleration) void getacceleration() suspendregulation()
54 Altre classi per i motori La classe NXTMotor per esempio è utile quando non si vuole regolare la velocità dei motori. - setpower(int apower) Used to control motor power directly. Use a value between 0 and int getpower()
55 Provare i programmi Riportati al seguente link: Scrivere un programma per replicare il movimento di un motore B in base allo spostamento manuale di un motore A
56 Gli encoder Il trasduttore di posizione angolare, è un dispositivo elettromeccanico che converte la posizione angolare del suo asse rotante in segnali elettrici numerici digitali Gli encoder si possono dividere in due grandi categorie: * assoluti ( * relativi (noti anche come incrementali)
57 Gli encoder relativi

58 Gli encoder relativi hanno in genere da 100 a aree per giro due piste fuori fase permettono di ottenere sia la posizione che la direzione della rotazione
59 Controllo dei motori in retroazione Gli encoder, tramite opportune funzioni, permettono di controllare la velocità, la posizione e di sincronizzare i motori.
60 Controllo dei Sensori Lejos mette a disposizione diverse classi per controllare e interrogare i sensori, le porte di collegamento vengono identificate con SensorPort.S1, S2, S3 o S4. Iniziamo dal più semplice: il sensore di contatto La classe è la TouchSensor, che va istanziata con il costruttore TouchSensor(SensorPort port)
61 Il sensore di contatto
62 Esempio di utilizzo del sensore di contatto import lejos.nxt.lcd; import lejos.nxt.sensorport; import lejos.nxt.touchsensor; public class TouchTest { public static void main(string[] args) throws Exception { TouchSensor touch = new TouchSensor(SensorPort.S1); while (!touch.ispressed()) { // try again } LCD.drawString("Finished", 3, 4); } }
63 Lettura dei valori dal sensore Come si può notare dall'esempio, per interrogare il sensore si usa il metodo Bool ispressed()
64 Programma di esempio task main() { SetSensor( S1, SENSOR_TOUCH ); } while( true ) { if( Sensor(S1)==0 ) { OnFwd(OUT_AB,50); } else { OnRev(OUT_AB,50); Wait(500); OnFwd(OUT_A,50); Wait(500); } }
65 Esercizi 1) Spostare in avanti per 2 secondi con potenza pari al 25% e tornare indietro per 1 secondo con velocità al 50%. 2) Mettere a velocità massima solo una ruota per tre secondi. 3) Mettere a velocità massima una ruota e massima negativa l'altra, per 3 secondi.
66 Esercizi da svolgere 4) Cosa cambia nel comportamento dell'esercizio 2 e 3? 5) Ripetere le istruzioni degli esercizi precedenti per tre volte usando un blocco di ripetizione, intervallando ogni ripetizione con tre secondi di pausa. 6) Usando il righello e gli altri strumenti necessari, determinare per quanto tempo devo far funzionare i motori al 50% perché il robot si sposti di 20 cm in linea retta. Come posso fare per avere una risposta più precisa?
67 Esercizi da svolgere 7) Far muovere il robot lungo il perimetro di un quadrato di lato 40 cm, al 60% della velocità utilizzando una delle funzioni degli esercizi precedenti. 8) Il robot si deve muovere a velocità costante pari al 50%. In caso di urto (rilevato dal sensore di contatto) deve arretrare di 20 cm, ruotare di 120 e ripartire al velocità costante.
68 Esercizi da svolgere 9) Contiamo gli urti: il robot si deve muovere a velocità costante, pari al 60%, in caso di urto (rilevato dal sensore di contatto) deve incrementare un'apposita variabile. Se il numero nella variabile è pari deve arretrare di 20 cm, ruotare di 120 e ripartire a velocità costante, se il numero è dispari deve arretrare di 20 cm, ruotare di 180 e ripartire a velocità costante.
69 Il sensore di luminosità Il sensore determina il livello di luminosità nell'ambiente; può anche emettere luce per poi rilevare quella riflessa.
70 Il sensore di luminosità
71 Controllo e utilizzo del sensore di luminosità La classe per l'utilizzo del sensore di luminosità è LightSensor istanziata con il costruttore LightSensor(SensorPort port) Possiamo interrogarlo con i metodi getlightvalue() getnormalizedlightvalue() oppure SensorPort.S1.readRawValue() SensorPort.S1.readValue()
72 Esempio di utilizzo del sensore di luminosità import lejos.nxt.lcd; import lejos.nxt.lightsensor; import lejos.nxt.sensorport; public class LightTest { } public static void main(string[] args) throws Exception { } LightSensor light = new LightSensor(SensorPort.S1); while (true) { } LCD.drawInt(light.getLightValue(), 4, 0, 0); LCD.drawInt(light.getNormalizedLightValue(), 4, 0, 1); LCD.drawInt(SensorPort.S1.readRawValue(), 4, 0, 2); LCD.drawInt(SensorPort.S1.readValue(), 4, 0, 3);
73 Il monitor dell'nxt Il monitor risulta utile per Debugging Settaggio di parametri Messaggi durante l'esecuzione Grafica Giochi
74 Carateristiche del monitor Il display ha una risoluzione 100 x 64 px è possibile disegnare qualsiasi cosa sullo schermo, ma visualizzeremo solo numeri o testi
75 Principali funzioni per il controllo del monitor La classe non ha istanze, solo metodi statici In modalità testo x da 0 to 15 e y da 0 a 7 void drawstring(string str, int x, int y) void drawint(int i, int x, int y) void drawint(int i, int places, int x, int y) void clear()
76 Esempi di utilizzo del display import lejos.nxt.lcd; public class LCDTest { public static void main(string[] args) throws Exception { LCD.drawString("Free RAM:", 0, 0); LCD.drawInt((int) System.getRuntime().freeMemory(), 6, 9, 0); Thread.sleep(2000); } }
77 Esercizi 1) Visualizzare sul monitor dell'nxt il valore di luminosità rilevato dal sensore impostato in modalità percentuale e poi in modalità raw. 2) Scrivere un programma per seguire una linea scura su fondo bianco utilizzando un solo sensore di luminosità.
78 Esercizi 3) Far ruotare per 360 il robot attorno al proprio asse. Memorizzare per ogni grado la luminosità rilevata utilizzando un vettore. Al termine della rotazione individuare l'angolo in cui è stata rilevata la massima luminosità e quindi riportare il robot in quella posizione.
79 Sensore ad ultrasuoni Valuta la distanza degli oggetti tramite onde acustiche E' un sensore intelligente, utilizza il protocollo I2C
80 Programmi 1) Far muovere in linea retta il robot fino a quando incontra un ostacolo ad una distanza inferiore a 40 cm. In questo caso farlo ruotare su se stesso di un angolo casuale compreso tra 100 e 180 e farlo di nuovo muovere in linea retta. Terminare il programma dopo cinque incontri.
81 Programmi 2) Far muovere il robot in linea retta. Quando viene rilevato un ostacolo ad una distanza inferiore al metro, la velocità deve diminuire direttamente proporzionale alla distanza fino ad annullarsi a 40 cm dall'ostacolo stesso. In ogni caso, giunto a 50 cm dall'ostacolo, il robot deve ruotare di 180 e riprendere il movimento rettilineo al 75% della velocità massima.
82 Programmi 3) Usare il sensore ad ultrasuoni per determinare la velocità di avvicinamento ad un muro (in cm/s) del vostro robot e visualizzarla sul monitor in modo che sia leggibile. Confrontare il risultato con una misura spazio/tempo effettuata da voi e con i calcoli teorici effettuati conoscendo il diametro della ruota e il numero di giri della ruota.
Programmare LEGO NXT con BricX
 Programmare LEGO NXT con BricX Overview NXT Hardware Ambiente di sviluppo NXC Programmare con NXC Interazione NXT - PC NXT hardware 4 Inputs (digitali e analogici) 3 Outputs (supporto per encoders) Schermo
Programmare LEGO NXT con BricX Overview NXT Hardware Ambiente di sviluppo NXC Programmare con NXC Interazione NXT - PC NXT hardware 4 Inputs (digitali e analogici) 3 Outputs (supporto per encoders) Schermo
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Java: Compilatore e Interprete
 Java: Compilatore e Interprete Java Virtual Machine Il bytecode non è Linguaggio Macchina. Per diventarlo, deve subire un ulteriore trasformazione che viene operata dall interprete Java in modalità JIT
Java: Compilatore e Interprete Java Virtual Machine Il bytecode non è Linguaggio Macchina. Per diventarlo, deve subire un ulteriore trasformazione che viene operata dall interprete Java in modalità JIT
IRSplit. Istruzioni d uso 07/10-01 PC
 3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
Fondamenti di Informatica 1. Prof. B.Buttarazzi A.A. 2010/2011
 Fondamenti di Informatica 1 Prof. B.Buttarazzi A.A. 2010/2011 Sommario Installazione SOFTWARE JDK ECLIPSE 03/03/2011 2 ALGORITMI E PROGRAMMI PROBLEMA ALGORITMO PROGRAMMA metodo risolutivo linguaggio di
Fondamenti di Informatica 1 Prof. B.Buttarazzi A.A. 2010/2011 Sommario Installazione SOFTWARE JDK ECLIPSE 03/03/2011 2 ALGORITMI E PROGRAMMI PROBLEMA ALGORITMO PROGRAMMA metodo risolutivo linguaggio di
La nuova generazione (NXT) di
 di") moria flash, 64Kbyte di RAM e clock a 48MHz. Un coprocessore Atmel AVR ad 8bit con 4Kbyte di memoria flash e 512Byte di RAM. Un CSR BlueCore 4, con 47Kbyte di RAM interna, memoria flash esterna ad 8Mbit
moria flash, 64Kbyte di RAM e clock a 48MHz. Un coprocessore Atmel AVR ad 8bit con 4Kbyte di memoria flash e 512Byte di RAM. Un CSR BlueCore 4, con 47Kbyte di RAM interna, memoria flash esterna ad 8Mbit
Arduino: Programmazione
 Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Tale attività non è descritta in questa dispensa
 Fondamenti di informatica Oggetti e Java ottobre 2014 1 Nota preliminare L installazione e l uso di Eclipse richiede di aver preliminarmente installato Java SE SDK Tale attività non è descritta in questa
Fondamenti di informatica Oggetti e Java ottobre 2014 1 Nota preliminare L installazione e l uso di Eclipse richiede di aver preliminarmente installato Java SE SDK Tale attività non è descritta in questa
12 - Introduzione alla Programmazione Orientata agli Oggetti (Object Oriented Programming OOP)
") 12 - Introduzione alla Programmazione Orientata agli Oggetti (Object Oriented Programming OOP) Programmazione e analisi di dati Modulo A: Programmazione in Java Paolo Milazzo Dipartimento di Informatica,
12 - Introduzione alla Programmazione Orientata agli Oggetti (Object Oriented Programming OOP) Programmazione e analisi di dati Modulo A: Programmazione in Java Paolo Milazzo Dipartimento di Informatica,
Gamma BRUSHLESS CROUZET
 Gamma BRUSHLESS CROUZET - Presentazione La ITE Industrialtecnoelettrica Srl di Bologna (tel.5.386.6) presenta la nuova gamma Crouzet di micromotori brushless di elevata qualità con coppie da 6 e 85 mnm
Gamma BRUSHLESS CROUZET - Presentazione La ITE Industrialtecnoelettrica Srl di Bologna (tel.5.386.6) presenta la nuova gamma Crouzet di micromotori brushless di elevata qualità con coppie da 6 e 85 mnm
Controllo di un Motore Elettrico in Corrente Continua
 Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Università degli studi di Roma LA SAPIENZA
 Università degli studi di Roma LA SAPIENZA Corso di ingegneria informatica e automatica Automazione I Realizzazione di una macchinina in grado di evitare le collisioni Di Alessandro Giuseppi All attenzione
Università degli studi di Roma LA SAPIENZA Corso di ingegneria informatica e automatica Automazione I Realizzazione di una macchinina in grado di evitare le collisioni Di Alessandro Giuseppi All attenzione
Tipi primitivi. Ad esempio, il codice seguente dichiara una variabile di tipo intero, le assegna il valore 5 e stampa a schermo il suo contenuto:
 Tipi primitivi Il linguaggio Java offre alcuni tipi di dato primitivi Una variabile di tipo primitivo può essere utilizzata direttamente. Non è un riferimento e non ha senso tentare di istanziarla mediante
Tipi primitivi Il linguaggio Java offre alcuni tipi di dato primitivi Una variabile di tipo primitivo può essere utilizzata direttamente. Non è un riferimento e non ha senso tentare di istanziarla mediante
Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base
 Sistema operativo Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base Architettura a strati di un calcolatore
Sistema operativo Definizione Parte del software che gestisce I programmi applicativi L interfaccia tra il calcolatore e i programmi applicativi Le funzionalità di base Architettura a strati di un calcolatore
La gestione dell input/output da tastiera La gestione dell input/output da file La gestione delle eccezioni
 La gestione dell input/output da tastiera La gestione dell input/output da file La gestione delle eccezioni Autore: Prof. Agostino Sorbara ITIS "M. M. Milano" Autore: Prof. Agostino Sorbara ITIS "M. M.
La gestione dell input/output da tastiera La gestione dell input/output da file La gestione delle eccezioni Autore: Prof. Agostino Sorbara ITIS "M. M. Milano" Autore: Prof. Agostino Sorbara ITIS "M. M.
REALIZZAZIONE DI UN LABORATORIO REMOTO PER ESPERIENZE DI ROBOTICA EDUCATIVA: LATO CLIENT
 TESI DI LAUREA REALIZZAZIONE DI UN LABORATORIO REMOTO PER ESPERIENZE DI ROBOTICA EDUCATIVA: LATO CLIENT RELATORE: Prof. Michele Moro LAUREANDO: Marco Beggio Corso di laurea Specialistica in Ingegneria
TESI DI LAUREA REALIZZAZIONE DI UN LABORATORIO REMOTO PER ESPERIENZE DI ROBOTICA EDUCATIVA: LATO CLIENT RELATORE: Prof. Michele Moro LAUREANDO: Marco Beggio Corso di laurea Specialistica in Ingegneria
Gli attuatori. Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo
 Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
A.S. 2010-2011. 1. Presentazione del materiale hardware MINDSTORMS.
 I.T.I.S. M.BARTOLO - PACHINO Progetto Introduzione alla robotica A.S. 2010-2011 1. Presentazione del materiale hardware MINDSTORMS. 2. Conoscenza dell unità programmabile - programmazione dei vari elementi
I.T.I.S. M.BARTOLO - PACHINO Progetto Introduzione alla robotica A.S. 2010-2011 1. Presentazione del materiale hardware MINDSTORMS. 2. Conoscenza dell unità programmabile - programmazione dei vari elementi
ICARO Terminal Server per Aprile
 ICARO Terminal Server per Aprile Icaro è un software aggiuntivo per Aprile (gestionale per centri estetici e parrucchieri) con funzionalità di terminal server: gira sullo stesso pc dove è installato il
ICARO Terminal Server per Aprile Icaro è un software aggiuntivo per Aprile (gestionale per centri estetici e parrucchieri) con funzionalità di terminal server: gira sullo stesso pc dove è installato il
SAPIENZA Università di Roma Facoltà di Ingegneria dell Informazione, Informatica e Statistica
 SAPIENZA Università di Roma Facoltà di Ingegneria dell Informazione, Informatica e Statistica Esercitazioni di PROGETTAZIONE DEL SOFTWARE (Corsi di Laurea in Ingegneria Informatica ed Automatica ed Ingegneria
SAPIENZA Università di Roma Facoltà di Ingegneria dell Informazione, Informatica e Statistica Esercitazioni di PROGETTAZIONE DEL SOFTWARE (Corsi di Laurea in Ingegneria Informatica ed Automatica ed Ingegneria
10 - Programmare con gli Array
 10 - Programmare con gli Array Programmazione e analisi di dati Modulo A: Programmazione in Java Paolo Milazzo Dipartimento di Informatica, Università di Pisa http://www.di.unipi.it/ milazzo milazzo di.unipi.it
10 - Programmare con gli Array Programmazione e analisi di dati Modulo A: Programmazione in Java Paolo Milazzo Dipartimento di Informatica, Università di Pisa http://www.di.unipi.it/ milazzo milazzo di.unipi.it
Eclipse. Avviare un progetto e compilare un semplice programma
 Eclipse Avviare un progetto e compilare un semplice programma Descrizione di Eclipse Eclipse è un ambiente di sviluppo che facilita la scrittura ed il debug di programmi java Permette di: Scrivere il codice
Eclipse Avviare un progetto e compilare un semplice programma Descrizione di Eclipse Eclipse è un ambiente di sviluppo che facilita la scrittura ed il debug di programmi java Permette di: Scrivere il codice
Sezione di PWM e Generatore di D/A Converter.
 Corso di BASCOM AVR - (34) Corso Teorico/Pratico di programmazione in BASCOM AVR. Autore: DAMINO Salvatore. Sezione di PWM e Generatore di D/A Converter. La struttura interna dei Mini Moduli è composta
Corso di BASCOM AVR - (34) Corso Teorico/Pratico di programmazione in BASCOM AVR. Autore: DAMINO Salvatore. Sezione di PWM e Generatore di D/A Converter. La struttura interna dei Mini Moduli è composta
Nascita di Java. Che cos e Java? Caratteristiche di Java. Java: linguaggio a oggetti
 Nascita di Java L uscita di Java, verso la metà degli anni novanta, fu accolta con molto entusiasmo dalla comunità dei programmatori e dei provider di servizi internet perché permetteva agli utenti del
Nascita di Java L uscita di Java, verso la metà degli anni novanta, fu accolta con molto entusiasmo dalla comunità dei programmatori e dei provider di servizi internet perché permetteva agli utenti del
Manuale IT_VNA by IZ1PMX
 Manuale IT_VNA by IZ1PMX Ver. 08.1.14 Analizzatore d antenna 1-50 MHz Descrizione: IT_VNA è uno strumento in grado di misurare i parametri di un'antenna come SWR, PHASE, RETURN LOSS, RS, RX da 1 a 50 MHz.
Manuale IT_VNA by IZ1PMX Ver. 08.1.14 Analizzatore d antenna 1-50 MHz Descrizione: IT_VNA è uno strumento in grado di misurare i parametri di un'antenna come SWR, PHASE, RETURN LOSS, RS, RX da 1 a 50 MHz.
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Corso PLC - Manuale Pratico 1
 Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
Corso PLC - Manuale Pratico 1 "!#$ % L'unità centrale di un PLC, chiamata più semplicemente CPU, normalmente occupa il primo modulo del rack. Si individua subito in quanto tipicamente è dotata di un selettore,
TASTIERA DI COMANDO E CONTROLLO PER INVERTERS EL.-5000
 ELCOM S.R.L. TASTIERA DI COMANDO E CONTROLLO PER INVERTERS EL.-5000 ( Rev. 0.3s ) MANUALE USO TASTIERA EL.-5000 I pulsanti hanno le seguenti funzioni: Comando di START abilitazione alla marcia con accensione
ELCOM S.R.L. TASTIERA DI COMANDO E CONTROLLO PER INVERTERS EL.-5000 ( Rev. 0.3s ) MANUALE USO TASTIERA EL.-5000 I pulsanti hanno le seguenti funzioni: Comando di START abilitazione alla marcia con accensione
Corso Eclipse. Prerequisiti. 1 Introduzione
 Corso Eclipse 1 Introduzione 1 Prerequisiti Uso elementare del pc Esecuzione ricerche su Internet Esecuzione download Conoscenza elementare della programmazione 2 1 Cos è Eclipse Eclipse è un IDE (Integrated
Corso Eclipse 1 Introduzione 1 Prerequisiti Uso elementare del pc Esecuzione ricerche su Internet Esecuzione download Conoscenza elementare della programmazione 2 1 Cos è Eclipse Eclipse è un IDE (Integrated
Descrizione del Test Range della Società SAMA
 NOTA TECNICA OGGETTO: Descrizione del Test Range della Società SAMA Autore Franco Marchetti. Approvazione Alessio Alleva. Pag 1 di 11 Sommario 1 SCOPO... 3 2 DESCRIZIONE DELL HARDWARE DEL TEST RANGE...
NOTA TECNICA OGGETTO: Descrizione del Test Range della Società SAMA Autore Franco Marchetti. Approvazione Alessio Alleva. Pag 1 di 11 Sommario 1 SCOPO... 3 2 DESCRIZIONE DELL HARDWARE DEL TEST RANGE...
Corso di Laurea Ingegneria Civile Fondamenti di Informatica. Traduzione ed esecuzione di programmi. Dispensa 08
 Corso di Laurea Ingegneria Civile Fondamenti di Informatica Dispensa 08 Traduzione ed esecuzione di programmi Traduzione ed esecuzione di programmi 1 Nota bene Alcune parti del presente materiale didattico
Corso di Laurea Ingegneria Civile Fondamenti di Informatica Dispensa 08 Traduzione ed esecuzione di programmi Traduzione ed esecuzione di programmi 1 Nota bene Alcune parti del presente materiale didattico
Sistema di monitoraggio delle correnti in ingresso in impianti fotovoltaici
 Sistema di monitoraggio delle correnti in ingresso in impianti fotovoltaici "L uso della piattaforma CompactRIO ha consentito l implementazione di un sistema di monitoraggio adatto ad essere utilizzato
Sistema di monitoraggio delle correnti in ingresso in impianti fotovoltaici "L uso della piattaforma CompactRIO ha consentito l implementazione di un sistema di monitoraggio adatto ad essere utilizzato
GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain.
 *+33(GLWRU GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain. Il programma si basa su un architettura di tasti funzionali presenti
*+33(GLWRU GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain. Il programma si basa su un architettura di tasti funzionali presenti
MONITORAGGI STRUTTURALI WIRELESS A LETTURA REMOTA
 ESSEBI Srl NUOVE FRONTIERE DEL MONITORAGGIO STRUTTURALE MONITORAGGI STRUTTURALI WIRELESS A LETTURA REMOTA Roma, 4 maggio 2011 Facoltà di Architettura via Gramsci, 53 Roma MONITORAGGIO WIRELESS I principali
ESSEBI Srl NUOVE FRONTIERE DEL MONITORAGGIO STRUTTURALE MONITORAGGI STRUTTURALI WIRELESS A LETTURA REMOTA Roma, 4 maggio 2011 Facoltà di Architettura via Gramsci, 53 Roma MONITORAGGIO WIRELESS I principali
Calcolo Focale. Ing. Vincenzo Falanga
 Calcolo Focale Calcolo Focale Sommario Calcolo Focale... 2 Installazione... 3 Installazione su dispositivi mobili (Tablet, smartphone, )... 3 Installazione su Pc... 3 Ottenere un codice di Attivazione...
Calcolo Focale Calcolo Focale Sommario Calcolo Focale... 2 Installazione... 3 Installazione su dispositivi mobili (Tablet, smartphone, )... 3 Installazione su Pc... 3 Ottenere un codice di Attivazione...
6 Cenni sulla dinamica dei motori in corrente continua
 6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
MICRO USB OTG TO SERIAL Adattatore da Micro USB OTG a Seriale RS232 per Tablet & Smartphone
 MICRO USB OTG TO SERIAL Adattatore da Micro USB OTG a Seriale RS232 per Tablet & Smartphone Manuale Utente XURS232MICROTG www.hamletcom.com Gentile Cliente, La ringraziamo per la fiducia riposta nei nostri
MICRO USB OTG TO SERIAL Adattatore da Micro USB OTG a Seriale RS232 per Tablet & Smartphone Manuale Utente XURS232MICROTG www.hamletcom.com Gentile Cliente, La ringraziamo per la fiducia riposta nei nostri
TRONCATRICE DOPPIA TESTA ELETTRONICA 500 TS
 TRONCATRICE DOPPIA TESTA ELETTRONICA 500 TS 500 TS - 500 CD - 500 D2K Troncatrice doppia testa elettronica Le troncatrici a doppia testa Pertici vantano caratteristiche uniche in quanto a robustezza e
TRONCATRICE DOPPIA TESTA ELETTRONICA 500 TS 500 TS - 500 CD - 500 D2K Troncatrice doppia testa elettronica Le troncatrici a doppia testa Pertici vantano caratteristiche uniche in quanto a robustezza e
MT2 e MT3: Schede e sistemi di controllo motori passo passo
 IPSES S.r.l. Scientific Electronics MT2 e MT3: Schede e sistemi di controllo motori passo passo La gamma più completa per il controllo intelligente dei motori passo passo I nostri sistemi sono la soluzione
IPSES S.r.l. Scientific Electronics MT2 e MT3: Schede e sistemi di controllo motori passo passo La gamma più completa per il controllo intelligente dei motori passo passo I nostri sistemi sono la soluzione
Arduino UNO. Single board microcontroller
 Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android...
 Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
RETI E SISTEMI INFORMATIVI
 RETI E SISTEMI INFORMATIVI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: mercoledì, 10.00-11.00. Studio 34, primo piano. Dip. Statistica 1 Modalità esame: scritto + tesina facoltativa
RETI E SISTEMI INFORMATIVI Prof. Andrea Borghesan venus.unive.it/borg borg@unive.it Ricevimento: mercoledì, 10.00-11.00. Studio 34, primo piano. Dip. Statistica 1 Modalità esame: scritto + tesina facoltativa
Studente (Cognome Nome): Corso di Informatica Corso di Laurea in Ingegneria Gestionale a.a. 2007-08 Primo scritto 11 Gennaio 2008
: Corso di Informatica Corso di Laurea in Ingegneria Gestionale a.a. 2007-08 Primo scritto 11 Gennaio 2008") Studente (Cognome Nome): Matricola: Corso di Informatica Corso di Laurea in Ingegneria Gestionale a.a. 2007-08 Primo scritto 11 Gennaio 2008 Si noti che le soluzioni ai quesiti saranno considerate valide
Studente (Cognome Nome): Matricola: Corso di Informatica Corso di Laurea in Ingegneria Gestionale a.a. 2007-08 Primo scritto 11 Gennaio 2008 Si noti che le soluzioni ai quesiti saranno considerate valide
Memoria Secondaria o di Massa
 .. Pacman ha una velocità che dipende dal processore...quindi cambiando computer va più velocemente..sarà poi vero? Memoria Secondaria o di Massa dischi fissi (hard disk), floppy disk, nastri magnetici,
.. Pacman ha una velocità che dipende dal processore...quindi cambiando computer va più velocemente..sarà poi vero? Memoria Secondaria o di Massa dischi fissi (hard disk), floppy disk, nastri magnetici,
FRANCESCO MARINO - TELECOMUNICAZIONI
 Classe: Data Gruppo: Alunni assenti Al termine di questa esercitazione ciascun alunno dovrà essere in grado di installare, configurare e utilizzare Microsoft Fax in Windows 95, 98 o Me. Le fasi di installazione
Classe: Data Gruppo: Alunni assenti Al termine di questa esercitazione ciascun alunno dovrà essere in grado di installare, configurare e utilizzare Microsoft Fax in Windows 95, 98 o Me. Le fasi di installazione
Dal protocollo IP ai livelli superiori
 Dal protocollo IP ai livelli superiori Prof. Enrico Terrone A. S: 2008/09 Protocollo IP Abbiamo visto che il protocollo IP opera al livello di rete definendo indirizzi a 32 bit detti indirizzi IP che permettono
Dal protocollo IP ai livelli superiori Prof. Enrico Terrone A. S: 2008/09 Protocollo IP Abbiamo visto che il protocollo IP opera al livello di rete definendo indirizzi a 32 bit detti indirizzi IP che permettono
Sensori di temperatura a termocoppia K Guida Utente
 Sensori di temperatura a termocoppia K Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 APPLICAZIONI TIPICHE:... 2 3 NORME DI INSTALLAZIONE:... 2 3.1 Connessione elettrica su acquisitori M1 ed MD4:... 2 3.2
Sensori di temperatura a termocoppia K Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 APPLICAZIONI TIPICHE:... 2 3 NORME DI INSTALLAZIONE:... 2 3.1 Connessione elettrica su acquisitori M1 ed MD4:... 2 3.2
10.1. Un indirizzo IP viene rappresentato in Java come un'istanza della classe InetAddress.
 ESERCIZIARIO Risposte ai quesiti: 10.1. Un indirizzo IP viene rappresentato in Java come un'istanza della classe InetAddress. 10.2. Un numero intero in Java è compreso nell'intervallo ( 2 31 ) e (2 31
ESERCIZIARIO Risposte ai quesiti: 10.1. Un indirizzo IP viene rappresentato in Java come un'istanza della classe InetAddress. 10.2. Un numero intero in Java è compreso nell'intervallo ( 2 31 ) e (2 31
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA
 MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
DATA LOGGER. Modello LR8410/20 LR8400/20 LR8401/20 LR8402/20 LR8431/20 8423. Portate: K, J, E, T, N, R, S, B, W, da -200 C a +2000 C
 DATA LOGGER Data Logger Misure Tensione Vcc Modello LR8410/20 LR8400/20 LR8401/20 LR8402/20 LR8431/20 8423 Temperatura termocoppie Temperatura termoresistenze PT100 e jpt100, a +800 C Umidità con sensore
DATA LOGGER Data Logger Misure Tensione Vcc Modello LR8410/20 LR8400/20 LR8401/20 LR8402/20 LR8431/20 8423 Temperatura termocoppie Temperatura termoresistenze PT100 e jpt100, a +800 C Umidità con sensore
3 - Variabili. Programmazione e analisi di dati Modulo A: Programmazione in Java. Paolo Milazzo
 3 - Variabili Programmazione e analisi di dati Modulo A: Programmazione in Java Paolo Milazzo Dipartimento di Informatica, Università di Pisa http://www.di.unipi.it/ milazzo milazzo di.unipi.it Corso di
3 - Variabili Programmazione e analisi di dati Modulo A: Programmazione in Java Paolo Milazzo Dipartimento di Informatica, Università di Pisa http://www.di.unipi.it/ milazzo milazzo di.unipi.it Corso di
Esercizi Java. class somma2 { static int somma(int a,int b) {return a+b; }
 {return a+b; }") Java è un linguaggio di programmazione c indipendente dalla piattaforma, ovvero un linguaggio di programmazione che permette di compilare i programmi una volta sola e di installarli su computer che usano
Java è un linguaggio di programmazione c indipendente dalla piattaforma, ovvero un linguaggio di programmazione che permette di compilare i programmi una volta sola e di installarli su computer che usano
Algoritmi di Ricerca. Esempi di programmi Java
 Fondamenti di Informatica Algoritmi di Ricerca Esempi di programmi Java Fondamenti di Informatica - D. Talia - UNICAL 1 Ricerca in una sequenza di elementi Data una sequenza di elementi, occorre verificare
Fondamenti di Informatica Algoritmi di Ricerca Esempi di programmi Java Fondamenti di Informatica - D. Talia - UNICAL 1 Ricerca in una sequenza di elementi Data una sequenza di elementi, occorre verificare
Architetture Applicative
 Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Guida alla compilazione on-line delle domande di Dote Scuola A.S. 2013-2014 - per le Famiglie INDICE
 Guida alla compilazione on-line delle domande di Dote Scuola A.S. 2013-2014 - per le Famiglie INDICE Introduzione... 2 Riconoscimento del soggetto richiedente da parte del sistema... 2 Elenco dei servizi
Guida alla compilazione on-line delle domande di Dote Scuola A.S. 2013-2014 - per le Famiglie INDICE Introduzione... 2 Riconoscimento del soggetto richiedente da parte del sistema... 2 Elenco dei servizi
Prova Finale a.a. 2011/2012. Laboratorio 1: Introduzione a Java e Eclipse
 Prova Finale a.a. 2011/2012 Laboratorio 1: Introduzione a Java e Eclipse 1 Java 6 Standard Edition Linguaggio Java (... (javac, Tool di sviluppo Librerie per l'interfaccia grafica Librerie di base Macchina
Prova Finale a.a. 2011/2012 Laboratorio 1: Introduzione a Java e Eclipse 1 Java 6 Standard Edition Linguaggio Java (... (javac, Tool di sviluppo Librerie per l'interfaccia grafica Librerie di base Macchina
Algebra di Boole: Concetti di base. Fondamenti di Informatica - D. Talia - UNICAL 1. Fondamenti di Informatica
 Fondamenti di Informatica Algebra di Boole: Concetti di base Fondamenti di Informatica - D. Talia - UNICAL 1 Algebra di Boole E un algebra basata su tre operazioni logiche OR AND NOT Ed operandi che possono
Fondamenti di Informatica Algebra di Boole: Concetti di base Fondamenti di Informatica - D. Talia - UNICAL 1 Algebra di Boole E un algebra basata su tre operazioni logiche OR AND NOT Ed operandi che possono
Corso di Laurea Ingegneria Informatica Fondamenti di Informatica
 Corso di Laurea Ingegneria Informatica Fondamenti di Informatica Dispensa E01 Esempi di programmi A. Miola Ottobre 2011 1 Contenuti Vediamo in questa lezione alcuni primi semplici esempi di applicazioni
Corso di Laurea Ingegneria Informatica Fondamenti di Informatica Dispensa E01 Esempi di programmi A. Miola Ottobre 2011 1 Contenuti Vediamo in questa lezione alcuni primi semplici esempi di applicazioni
Programmare in Java. Olga Scotti
 Programmare in Java Olga Scotti Linguaggi di programmazione linguaggio macchina assembler linguaggi ad alto livello Linguaggi ad alto livello istruzioni comprensibili linguaggio simile a quello naturale
Programmare in Java Olga Scotti Linguaggi di programmazione linguaggio macchina assembler linguaggi ad alto livello Linguaggi ad alto livello istruzioni comprensibili linguaggio simile a quello naturale
COMUNICAZIONE UTENTI SISTEMI-PROFIS INSTALLAZIONE GE.RI.CO. 2015 e PARAMETRI2015
 COMUNICAZIONE UTENTI SISTEMI-PROFIS INSTALLAZIONE GE.RI.CO. 2015 e PARAMETRI2015 Vicenza, 3 giugno 2015 Gentile cliente, si ricorda che a partire dall aggiornamento PROFIS 2011.1 è stato automatizzato
COMUNICAZIONE UTENTI SISTEMI-PROFIS INSTALLAZIONE GE.RI.CO. 2015 e PARAMETRI2015 Vicenza, 3 giugno 2015 Gentile cliente, si ricorda che a partire dall aggiornamento PROFIS 2011.1 è stato automatizzato
Tutorial 3DRoom. 3DRoom
 Il presente paragrafo tratta il rilievo di interni ed esterni eseguito con. L utilizzo del software è molto semplice ed immediato. Dopo aver fatto uno schizzo del vano si passa all inserimento delle diagonali
Il presente paragrafo tratta il rilievo di interni ed esterni eseguito con. L utilizzo del software è molto semplice ed immediato. Dopo aver fatto uno schizzo del vano si passa all inserimento delle diagonali
Registratore Dati Umidità e Temperatura
 Manuale d'istruzioni Registratore Dati Umidità e Temperatura Modello RHT Introduzione Congratulazioni per aver acquistato questo Registratore Dati di Temperatura e Umidità. Con questo strumento, si possono
Manuale d'istruzioni Registratore Dati Umidità e Temperatura Modello RHT Introduzione Congratulazioni per aver acquistato questo Registratore Dati di Temperatura e Umidità. Con questo strumento, si possono
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
MODULO STAMPA BOLLETTINO PDF
 MODULO STAMPA BOLLETTINO PDF MODULO STAMPA BOLLETTINO PDF pagina 2 di 7 INTRODUZIONE Il modulo STAMPA BOLLETTINO PDF è una applicazione stand-alone, sviluppata in linguaggio Java, che permette di produrre
MODULO STAMPA BOLLETTINO PDF MODULO STAMPA BOLLETTINO PDF pagina 2 di 7 INTRODUZIONE Il modulo STAMPA BOLLETTINO PDF è una applicazione stand-alone, sviluppata in linguaggio Java, che permette di produrre
La tecnica proporzionale
 La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
La tecnica proporzionale Regolatori di pressione La tecnica proporzionale Regolatori di pressione La tecnica proporzionale La tecnica proporzionale Controllo direzione e flusso La tecnica proporzionale
Università di Torino Facoltà di Scienze MFN Corso di Studi in Informatica. Programmazione I - corso B a.a. 2009-10. prof.
 Università di Torino Facoltà di Scienze MFN Corso di Studi in Informatica Programmazione I - corso B a.a. 009-10 prof. Viviana Bono Blocco 9 Metodi statici: passaggio parametri, variabili locali, record
Università di Torino Facoltà di Scienze MFN Corso di Studi in Informatica Programmazione I - corso B a.a. 009-10 prof. Viviana Bono Blocco 9 Metodi statici: passaggio parametri, variabili locali, record
DESCRIZIONE GENERALE E ARCHITETTURA HARDWARE DI I-DROID01
 DESCRIZIONE GENERALE E ARCHITETTURA HARDWARE DI I-DROID01 VISIONE GENERALE DEGLI APPARATI DI CUI È DOTATO I-D01 VISIONE GENERALE LED VERDI, ROSSI E GIALLI PER GLI OCCHI LED AZZURRI PER LE ORECCHIE TESTA
DESCRIZIONE GENERALE E ARCHITETTURA HARDWARE DI I-DROID01 VISIONE GENERALE DEGLI APPARATI DI CUI È DOTATO I-D01 VISIONE GENERALE LED VERDI, ROSSI E GIALLI PER GLI OCCHI LED AZZURRI PER LE ORECCHIE TESTA
PR242012 23. aprile 2012 Motion Control Pagina 1 di 5. XTS extended Transport System: un nuovo modo di concepire il Motion Control
 Motion Control Pagina 1 di 5 XTS extended Transport System: un nuovo modo di concepire il Motion Control Il nuovo principio: motore lineare con moto circolare Il nuovo sistema di azionamento XTS (extended
Motion Control Pagina 1 di 5 XTS extended Transport System: un nuovo modo di concepire il Motion Control Il nuovo principio: motore lineare con moto circolare Il nuovo sistema di azionamento XTS (extended
Programmazione in Java Parte I: Fondamenti
 Programmazione in Java Parte I: Fondamenti Lezione 1 Dott. Marco Faella Riferimenti Testi consigliati: Progettazione del software e design pattern in Java di C.S. Horstmann Apogeo Gli esempi di codice
Programmazione in Java Parte I: Fondamenti Lezione 1 Dott. Marco Faella Riferimenti Testi consigliati: Progettazione del software e design pattern in Java di C.S. Horstmann Apogeo Gli esempi di codice
2 Gli elementi del sistema di Gestione dei Flussi di Utenza
 SISTEMA INFORMATIVO page 4 2 Gli elementi del sistema di Gestione dei Flussi di Utenza Il sistema è composto da vari elementi, software e hardware, quali la Gestione delle Code di attesa, la Gestione di
SISTEMA INFORMATIVO page 4 2 Gli elementi del sistema di Gestione dei Flussi di Utenza Il sistema è composto da vari elementi, software e hardware, quali la Gestione delle Code di attesa, la Gestione di
Hardware delle reti LAN
 Hardware delle reti LAN Le reti LAN utilizzano una struttura basata su cavi e concentratori che permette il trasferimento di informazioni. In un ottica di questo tipo, i computer che prendono parte allo
Hardware delle reti LAN Le reti LAN utilizzano una struttura basata su cavi e concentratori che permette il trasferimento di informazioni. In un ottica di questo tipo, i computer che prendono parte allo
Compatto, espandibile e potente. Il controller che cresce con l applicazione. www.kse.it
 Compatto, espandibile e potente. Il controller che cresce con l applicazione. www.kse.it Know-how per le industrie 1 KSE Touch Controller CNC con touch screen 7 + schede assi e IO Compatto, Veloce ed Produttivo.
Compatto, espandibile e potente. Il controller che cresce con l applicazione. www.kse.it Know-how per le industrie 1 KSE Touch Controller CNC con touch screen 7 + schede assi e IO Compatto, Veloce ed Produttivo.
Interfaccia BL232 con uscite RS232/422/485 MODBUS e 0-10V. Interfaccia BL232
 BIT LINE STRUMENTAZIONE PER IL MONITORAGGIO AMBIENTALE Interfaccia BL232 con uscite RS232/422/485 MODBUS e 0-10V Facile e rapida installazione Ideale domotica e building automation Alimentazione estesa
BIT LINE STRUMENTAZIONE PER IL MONITORAGGIO AMBIENTALE Interfaccia BL232 con uscite RS232/422/485 MODBUS e 0-10V Facile e rapida installazione Ideale domotica e building automation Alimentazione estesa
Distanziometro Laser ad alta velocità IDP-RFD100K CARATTERISTICHE: DESCRIZIONE:
 Distanziometro Laser ad alta velocità CARATTERISTICHE: Elevata velocità di acquisizione pari a 100Ksps (T acq =10us) Elevata accuratezza fino a ±5mm Elevata ripetibilità fino a ±0.2mm Distanza di misura
Distanziometro Laser ad alta velocità CARATTERISTICHE: Elevata velocità di acquisizione pari a 100Ksps (T acq =10us) Elevata accuratezza fino a ±5mm Elevata ripetibilità fino a ±0.2mm Distanza di misura
WEBDYNSUN LA SOLUZIONE DEDICATA AI SISTEMI DI MONITORAGGIO DI IMPIANTI FOTOVOLTAICI
 WEBDYNSUN LA SOLUZIONE DEDICATA AI SISTEMI DI MONITORAGGIO DI IMPIANTI FOTOVOLTAICI Secondo i dati forniti dal GSE, il numero degli impianti fotovoltaici installati in Italia ha superato all inizio del
WEBDYNSUN LA SOLUZIONE DEDICATA AI SISTEMI DI MONITORAGGIO DI IMPIANTI FOTOVOLTAICI Secondo i dati forniti dal GSE, il numero degli impianti fotovoltaici installati in Italia ha superato all inizio del
Sistemi di Automazione Industriale
 Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Introduzione ai PLC Sistemi di Automazione Industriale Ridurre e/o eliminare il ruolo dell operatore umano Ogni sistema di automazione prevede: Sistema Controllato; è un generatore di eventi non prevedibili
Le command line di Java
 Le command line di Java Esercitazioni di Programmazione 2 Novella Brugnolli brugnoll@science.unitn.it Ambiente di lavoro Per compilare ed eseguire un programma Java abbiamo bisogno di: The JavaTM 2 Platform,
Le command line di Java Esercitazioni di Programmazione 2 Novella Brugnolli brugnoll@science.unitn.it Ambiente di lavoro Per compilare ed eseguire un programma Java abbiamo bisogno di: The JavaTM 2 Platform,
INFORMAZIONI PER LA REGOLAZIONE DELLE SOGLIE DI FREQUENZA NEGLI INVERTER POWER-ONE IN ACCORDO ALLA DELIBERA DELL AEEG 243/2013/R/EEL (6 Giugno, 2013)
") INFORMAZIONI PER LA REGOLAZIONE DELLE SOGLIE DI FREQUENZA NEGLI INVERTER POWER-ONE IN ACCORDO ALLA DELIBERA DELL AEEG 243/2013/R/EEL (6 Giugno, 2013) Data 2013/12/16 Prima revisione. 2014/01/08 Aggiunto
INFORMAZIONI PER LA REGOLAZIONE DELLE SOGLIE DI FREQUENZA NEGLI INVERTER POWER-ONE IN ACCORDO ALLA DELIBERA DELL AEEG 243/2013/R/EEL (6 Giugno, 2013) Data 2013/12/16 Prima revisione. 2014/01/08 Aggiunto
U SB M I N I ADAPTE R BLUETOOTH
 COMMUNICATION S U PPOR T U SB M I N I ADAPTE R BLUETOOTH CLASS I I M A NUALE NI - 7075 2 0 C O M M U N I C AT I O N S U P P O R T U S B A D A P T E R B L U E T O O T H C L A S S I I P r i m a d i t u t
COMMUNICATION S U PPOR T U SB M I N I ADAPTE R BLUETOOTH CLASS I I M A NUALE NI - 7075 2 0 C O M M U N I C AT I O N S U P P O R T U S B A D A P T E R B L U E T O O T H C L A S S I I P r i m a d i t u t
CONTROLLO NUMERICO Z32
 CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
MultiPresa MPP Serie Intell SNMP ver. 1.2
 MultiPresa MPP Serie Intell SNMP ver. 1.2 MPPControllerPower è Serie di MultiPresaProfessionale a controllo remoto Lan per la distribuzione e il controllo dell alimentazione di apparati installati in armadi
MultiPresa MPP Serie Intell SNMP ver. 1.2 MPPControllerPower è Serie di MultiPresaProfessionale a controllo remoto Lan per la distribuzione e il controllo dell alimentazione di apparati installati in armadi
Concetto di Funzione e Procedura METODI in Java
 Fondamenti di Informatica Concetto di Funzione e Procedura METODI in Java Fondamenti di Informatica - D. Talia - UNICAL 1 Metodi e Sottoprogrammi Mentre in Java tramite le classi e gli oggetti è possibile
Fondamenti di Informatica Concetto di Funzione e Procedura METODI in Java Fondamenti di Informatica - D. Talia - UNICAL 1 Metodi e Sottoprogrammi Mentre in Java tramite le classi e gli oggetti è possibile
Appunti di Informatica www.mimmocorrado.it 1
 Installare Java Il programma può essere scaricato dal seguente indirizzo: http://www.java.com/it/download/windows_ie.jsp?locale=it&host=www.java.com Per installare la JDK è necessario: 1. scaricare il
Installare Java Il programma può essere scaricato dal seguente indirizzo: http://www.java.com/it/download/windows_ie.jsp?locale=it&host=www.java.com Per installare la JDK è necessario: 1. scaricare il
Caratteristiche Generali
 ORGA portable Caratteristiche Generali ORGA portable è un sistema portatile che permette la gestione di commentari audio multilingua in simultanea. Questo significa che un commento audio potrà essere ascoltato
ORGA portable Caratteristiche Generali ORGA portable è un sistema portatile che permette la gestione di commentari audio multilingua in simultanea. Questo significa che un commento audio potrà essere ascoltato
Pixel Pitch (mm) 0.248x0.248 Peso solo monitor 2,8kg Profondità (mm) 11,9 Colore nero
 0.248x0.248 Peso solo monitor 2,8kg Profondità (mm) 11,9 Colore nero") TOPFLEX 222Y 1920x1080 pixel 2x22" www.multimonitortrading.it PREZZO iva inclusa: 690,00 Totale diagonale : 39" Multimonitor con bracci indipendenti -Supporto con piede a Y Opzione Orizzontale Opzione
TOPFLEX 222Y 1920x1080 pixel 2x22" www.multimonitortrading.it PREZZO iva inclusa: 690,00 Totale diagonale : 39" Multimonitor con bracci indipendenti -Supporto con piede a Y Opzione Orizzontale Opzione
Progetto di un sistema di controllo per un robot basato su CAN
 Progetto di un sistema di controllo per un robot basato su CAN Laurea in Ingegneria Informatica ed Elettronica Università degli Studi di Perugia Facoltà di Ingegneria Candidato: Giulio Spinozzi Relatore:
Progetto di un sistema di controllo per un robot basato su CAN Laurea in Ingegneria Informatica ed Elettronica Università degli Studi di Perugia Facoltà di Ingegneria Candidato: Giulio Spinozzi Relatore:
HD 2108.1 HD 2108.2 HD 2128.1 HD 2128.2
 HD 2108.1 HD 2108.2 HD 2128.1 HD 2128.2 HD2108.1 HD2108.2 HD2128.1 HD2128.2 Ingressi Tc: 1 1 2 2 Capacità di memorizzazione 76000 campioni 38000 coppie di temperature Interfaccia PC RS232C RS232C + USB2.0
HD 2108.1 HD 2108.2 HD 2128.1 HD 2128.2 HD2108.1 HD2108.2 HD2128.1 HD2128.2 Ingressi Tc: 1 1 2 2 Capacità di memorizzazione 76000 campioni 38000 coppie di temperature Interfaccia PC RS232C RS232C + USB2.0
Manuale di programmazione BerMar_Drive_Software
 Invert er LG Manuale di programmazione BerMar_Drive_Software Mot ori elet t ric i Informazioni preliminari... 2 Installazione... 3 Avvio del programma... 4 Funzionamento Off-Line... 7 Caricamento di una
Invert er LG Manuale di programmazione BerMar_Drive_Software Mot ori elet t ric i Informazioni preliminari... 2 Installazione... 3 Avvio del programma... 4 Funzionamento Off-Line... 7 Caricamento di una
C. P. U. MEMORIA CENTRALE
 C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
Provincia di Siena UFFICIO TURISMO. Invio telematico della comunicazione dei prezzi e dei servizi: istruzioni per l uso
 Provincia di Siena UFFICIO TURISMO Invio telematico della comunicazione dei prezzi e dei servizi: istruzioni per l uso Per informazioni contattare: - Annalisa Pannini 0577.241.263 pannini@provincia.siena.it
Provincia di Siena UFFICIO TURISMO Invio telematico della comunicazione dei prezzi e dei servizi: istruzioni per l uso Per informazioni contattare: - Annalisa Pannini 0577.241.263 pannini@provincia.siena.it
uadro Soluzione software e hardware Per le rilevazione presenze Gestione Aziendale Fa quadrato attorno alla tua azienda
 Fa quadrato attorno alla tua azienda Per le rilevazione presenze Perché scegliere Q Rilevazione Presenze? Si tratta di un sistema completo di software e hardware per realtà che intendono automatizzare
Fa quadrato attorno alla tua azienda Per le rilevazione presenze Perché scegliere Q Rilevazione Presenze? Si tratta di un sistema completo di software e hardware per realtà che intendono automatizzare
Il sensore rilevatore di presenza modalità d uso
 SENSORE RILEVATORE DI PRESENZA Il sensore rilevatore di presenza modalità d uso I moduli pic-sms seriali e le versioni professionali con gsm integrato sono di fatto anche dei veri e propri sistemi d allarme
SENSORE RILEVATORE DI PRESENZA Il sensore rilevatore di presenza modalità d uso I moduli pic-sms seriali e le versioni professionali con gsm integrato sono di fatto anche dei veri e propri sistemi d allarme
Scrivere un programma in Java
 Programmare in JAVA Leonardo Rigutini Dipartimento Ingegneria dell Informazione Università di Siena Via Roma 56 53100 SIENA uff. 0577 234850 - interno: 7102 Stanza 119 rigutini@dii.unisi.it http://www.dii.unisi.it/~rigutini/
Programmare in JAVA Leonardo Rigutini Dipartimento Ingegneria dell Informazione Università di Siena Via Roma 56 53100 SIENA uff. 0577 234850 - interno: 7102 Stanza 119 rigutini@dii.unisi.it http://www.dii.unisi.it/~rigutini/
Realizzazione di un robot olonomo
 UNIVERSITÀ DI BRESCIA FACOLTÀ DI INGEGNERIA Dipartimento di Ingegneria dell Informazione Laboratorio di Robotica Avanzata Advanced Robotics Laboratory Corso di Robotica (Prof. Riccardo Cassinis) Realizzazione
UNIVERSITÀ DI BRESCIA FACOLTÀ DI INGEGNERIA Dipartimento di Ingegneria dell Informazione Laboratorio di Robotica Avanzata Advanced Robotics Laboratory Corso di Robotica (Prof. Riccardo Cassinis) Realizzazione
Distributori DPI DESCRIZIONE SERVIZIO. Informazioni Generali
 PARTNER Distributori DPI DESCRIZIONE SERVIZIO Informazioni Generali Multi-Tech srl propone un servizio semplice e razionale grazie al quale è possibile rendere disponibili, 24 ore su 24 e per 365 giorni
PARTNER Distributori DPI DESCRIZIONE SERVIZIO Informazioni Generali Multi-Tech srl propone un servizio semplice e razionale grazie al quale è possibile rendere disponibili, 24 ore su 24 e per 365 giorni
esercizi Esercizi / problemi
 Sistemi informativi applicati (reti di calcolatori): esercizi 1 Esercizi / problemi 1. Creare un applicazione che calcoli la media aritmetica dei seguenti valori interi: 35, 117, 23 e ne visualizzi il
Sistemi informativi applicati (reti di calcolatori): esercizi 1 Esercizi / problemi 1. Creare un applicazione che calcoli la media aritmetica dei seguenti valori interi: 35, 117, 23 e ne visualizzi il
Fondamenti di macchine elettriche Corso SSIS 2006/07
 9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
Una guida per l utilizzazione educativa del robot Mindstorms NXT con programmazione Java
 Università degli Studi di Padova Facoltà di Ingegneria Corso di Laurea in Ingegneria Informatica tesi di laurea Una guida per l utilizzazione educativa del robot Mindstorms NXT con programmazione Java
Università degli Studi di Padova Facoltà di Ingegneria Corso di Laurea in Ingegneria Informatica tesi di laurea Una guida per l utilizzazione educativa del robot Mindstorms NXT con programmazione Java