Ambienti di Sviluppo SW Classici
|
|
|
- Emanuele Bartolini
- 5 anni fa
- Visualizzazioni
Transcript
1 Ambienti di Sviluppo SW Classici Ambienti di sviluppo per Software General Purpose Ambiente per l editing del programma (con funzioni di auto-documentazione) Controllo di Configurazione Compilatore e Debugger (con modalità interattive) Produzione del codice per l utilizzo sulle macchine di destinazione Ambienti di Sviluppo Classici per Applicazioni di Controllo ed Automazione Linguaggi C, ADA, Assembler o specifici della macchina (ad es. Ladder) Editing del programma come per il SW general purpose Compilazione e programmazione del dispositivo (Download del programma) Debugging e Test con semplici simulatori di I/O
2 Ambienti di Sviluppo per il Rapid Prototyping Stesso linguaggio grafico dell ambiente di progettazione e sviluppo (ad es. MATLAB/SIMULINK, MATRIXx, ecc.) Algoritmi di integrazione numerica a passo fisso Virtualizzazione dei dispositivi di I/O Meccanismi di gestione del multitasking e di comunicazione tra task Generazione automatica del codice in real-time Possibilità di configurare il processo di generazione del codice finale Download dell applicazione real-time trasparente all utente Piattaforme Hardware dedicate (non quelle reali) Ambiente grafico flessibile per la costruzione di MMI Memorizzazione di tutte le variabili di interesse Variabili da monitorare richiamate direttamente dallo schema iniziale Possibilità di verifica della tempificazione dei task Controllo dello stato dell applicazione real-time
3 Architettura di un Ambiente per il Rapid Prototyping Configurazione APB Schedulers e Gestione Task Librerie dei Dispositivi di I/O Integratori Numerici a passo fisso Automatic Program Building Compilatore e Linker Interfaccia Comunicazione Interfaccia Comunicazione Logging Firmware di Download Algoritmo o Modello numerico Integratore Numerico MicroKernel e Scheduler Gestione I/O Ambiente di Sviluppo Off-Line MMI e Debugger On-Line Sistema Operativo General Purpose Dispositivi di I/O Macchine Target (Bare Board) Macchine Host
4 Componenti di un ambiente di Rapid Prototyping Ambiente di sviluppo Off-Line: sono le applicazioni che consentono di sviluppare i modelli di simulazione dell impianto, di realizzare prototipi di leggi di controllo ed automazione e di analizzarne le prestazioni. Librerie indipendenti dal Target: sono librerie di codice che consentono di integrare numericamente equazioni differenziali alle derivate ordinarie che possono essere utilizzate anche nella macchina real-time, indipendentemente dal tipo di macchina target. Librerie dipendenti dal Target: sono delle librerie che dipendono dalla macchina target e dal suo S.O. e che consentono di accedere run-time ai moduli di I/O e di utilizzare le primitive del kernel RT per la gestione dei task e lo scheduling. Ambiente di Automatic Program Building: è il vero e proprio ambiente per la generazione automatica di codice in rel-time in un linguaggio compatibile con il compilatore della macchina target. MMI e Debugger On-Line: sono le applicazioni che, tramite un canale dedicato (Comunicazione Host/Target), consentono on-line operazioni di monitoring delle variabili e la modifica dei parametri di funzionamento dell applicazione RT. Firmware di download: è il sistema che effettua il bootstrap della macchina target e che gestisce le operazioni di download dell applicazione RT. Logging: è una routine che gestisce la comunicazione con la macchina host per consentire il monitoraggio e la variazione on-line delle variabili e dei parametri dell applicazione RT.
5 Caratteristiche Generali di SIMULINK/RTW Ambiente di sviluppo off-line MATLAB per l analisi dinamica e la progettazione di algoritmi di controllo ed automazione SIMULINK per lo sviluppo di modelli di simulazione di controllori e di processi d impianto Linguaggio C per l implementazione di algoritmi speciali (S-functions) Flessibilità di Automatic Program Building Processo di produzione del SW RT gestito da un m-file (make_rtw.m) che richiama le varie routine per l implementazione degli step di produzione automatica del SW Definizione delle opzioni di compilazione del codice attraverso un system target file (.tlc) ed inclusione del codice ottimizzato per i singoli blocchi Simulink in una libreria di block target files Definizione di un makefile template dove vengono inserite le opzioni di compilazione e linking e fornita la possibilità di inclusione di moduli runtime specifici per il Target Caratteristiche del supporto real-time Produzione di codice embedded (ottimizzato, da installare manualmente sul Target) oppure di codice non embedded (non ottimizzato, scaricato anche automaticamente) Supporto per esecuzione non real-time (il più veloce possibile) per scopi di validazione, e per macchine target senza sistema operativo RT (bare board) o con RTOS Disponibilità di uno scheduler di simulazione e relativi codici per l integrazione ODE
6 Ambiente di Sviluppo xpc Target SO Macchina Host: Windows 98/2000/NT Ambiente di sviluppo e APB: SIMULINK/RTW Compilatore e Linker: Microsoft Visual C/C++ o WATCOM Macchina Target: sistemi PC-based Intel 386/486/Pentium e AMD k5/k6/athlon con una unità in virgola mobile (PC normali, PC industriali, PC104 e PC104plus) Firmware di loader: MS-DOS (poi sostituito completamente da un kernel in real-time) Real-Time OS: microkernel real-time in modalità protetta con flat memory model (WindwsNT) che gestisce la fase di download, logging, start/stop applicazione, minima interfaccia grafica, scheduling statico o pre-emptive rate monotonic Comunicazione Host/Target: TCP/IP e seriale RS232 Libreria Driver I/O: supporto per vari dispositivi di I/O di diverse case produttrici (National Instrument, Real-Time Devices, Diamond, ecc.) Libreria Task Management: Standard di SIMULINK/RTW MMI e Gestione on-line: MATLAB/SIMULINK tramite linea di comando MATLAB, con SIMULINK external mode o con la libreria Dials & Gauges, interfaccia via WEB Capacità di diagnostica: scarso supporto in linea (verifica del intervallo di esecuzione del task più veloce e reboot software della macchina)
7 Ambiente di Sviluppo dspace SO Macchina Host: Windows 98/2000/NT Ambiente di sviluppo e APB: SIMULINK/RTW con TLC dedicato Compilatore e Linker: PowerPC compiler o Texas Instrument DSP compiler Macchina Target: sistemi HW dedicati con soluzioni sia single board che sistemi modulari, oppure sistemi portatili per test speciali. Firmware di loader: proprietario e dipendente dalla macchina target Real-Time OS: microkernel real-time proprietario che gestisce il logging, start/stop applicazione, scheduling statico o pre-emptive rate monotonic, la tempificazione di task aperiodici, la memorizzazione dei dati su flash rom locale Comunicazione Host/Target: TCP/IP e su bus dedicato ad alta velocità Libreria Driver I/O: supporto per varie tipologie di I/O prodotte dalla dspace Libreria Task Management: Standard di SIMULINK/RTW con supporto per la gestione di task aperiodici MMI e Gestione on-line: applicazione specifica che consente oltre alle funzionalità di base, la completa automazione dell esperimento Capacità di diagnostica: scarso supporto in linea
 Peso massimo al decollo: 800 N Carico utile: 100 N Tangenza operativa: 2000 m Rotori coassiali: 2 Velocità nominale rotori: 3000 rpm Motori: 3 a 120 Giri nominali motori:")
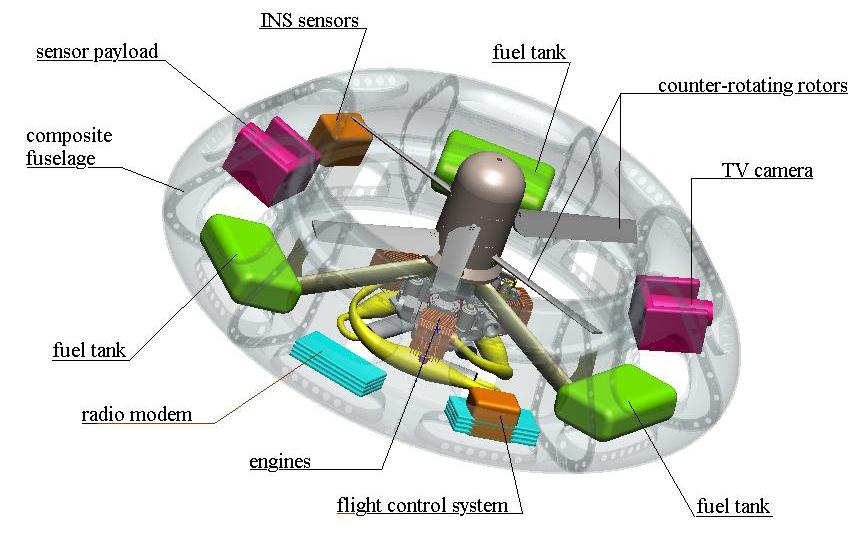
8 Caratteristiche tecniche Diametro esterno fusoliera: 1,9 m Diametro rotori: 1,1 m Diametro corpo centrale: 0,25 m Potenza sistema propulsivo: 45 hp Autonomia: 1,5 h Velocità massima: 30 m/s (100 Km/h) Peso massimo al decollo: 800 N Carico utile: 100 N Tangenza operativa: 2000 m Rotori coassiali: 2 Velocità nominale rotori: 3000 rpm Motori: 3 a 120 Giri nominali motori: 11000
9 Impianti

10

11 Hardware di navigazione: onboard computer INS/GPS C-Migits III 64MB Flash Memory CPU Power Board Batterie Generatori 128MB SDRAM Bussola digitale C-100 Sensori navigazione RS232 MESA 4I23 2xQUARTZ NET2/ET PWM Servo System Ciclico longitudinale, laterale Collettivo Differenziale Manette motori RADIO MODEM SERIALE PC-104 Stack

12 Prototipazione software del sistema di guida e controllo
Struttura dei Sistemi Operativi
 STRUTTURA DEI SISTEMI OPERATIVI 3.1 Struttura dei Componenti Servizi di un sistema operativo System Call Programmi di sistema Struttura del sistema operativo Macchine virtuali Progettazione e Realizzazione
STRUTTURA DEI SISTEMI OPERATIVI 3.1 Struttura dei Componenti Servizi di un sistema operativo System Call Programmi di sistema Struttura del sistema operativo Macchine virtuali Progettazione e Realizzazione
SISTEMI OPERATIVI EMBEDDED. Sistemi Embedded
 SISTEMI OPERATIVI SISTEMI OPERATIVI EMBEDDED Sistemi Embedded» Termine utilizzato per indicare l uso di HW e SW all interno di un prodotto progettato per svolgere una funzione specifica il computer non
SISTEMI OPERATIVI SISTEMI OPERATIVI EMBEDDED Sistemi Embedded» Termine utilizzato per indicare l uso di HW e SW all interno di un prodotto progettato per svolgere una funzione specifica il computer non
Orchestra Control. Caso di Studio Scambiatore Pezzi SPI
 POLITECNICO DI MILANO V Facoltà di Ingegneria Orchestra Control Caso di Studio Scambiatore Pezzi SPI Sistemi ad Eventi Discreti A.A. 2010-2011 Sommario Orchestra Control Scambiatore pezzi Controllo Modulare
POLITECNICO DI MILANO V Facoltà di Ingegneria Orchestra Control Caso di Studio Scambiatore Pezzi SPI Sistemi ad Eventi Discreti A.A. 2010-2011 Sommario Orchestra Control Scambiatore pezzi Controllo Modulare
Sistemi in tempo reale: applicazioni alla robotica. Sistemi in tempo reale: applicazioni alla robotica p.1/15
 Sistemi in tempo reale: applicazioni alla robotica Sistemi in tempo reale: applicazioni alla robotica p.1/15 Sistemi operativi Hardware Firmware Kernel Driver Applicazioni Interfacce Sistemi in tempo reale:
Sistemi in tempo reale: applicazioni alla robotica Sistemi in tempo reale: applicazioni alla robotica p.1/15 Sistemi operativi Hardware Firmware Kernel Driver Applicazioni Interfacce Sistemi in tempo reale:
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
Laboratorio di Informatica I
 Struttura della lezione Lezione 2: Introduzione al corso Vittorio Scarano Laboratorio di Informatica I Corso di Laurea in Informatica Classificazione degli elaboratori Alcuni concetti base: la struttura
Struttura della lezione Lezione 2: Introduzione al corso Vittorio Scarano Laboratorio di Informatica I Corso di Laurea in Informatica Classificazione degli elaboratori Alcuni concetti base: la struttura
SOFTWARE. Programmi e dati che indicano al computer come svolgere un determinato compito
 SOFTWARE MODULO 3 SOFTWARE Programmi e dati che indicano al computer come svolgere un determinato compito Programma: sequenza di istruzioni, scritte in un determinato linguaggio, con le quali si fa eseguire
SOFTWARE MODULO 3 SOFTWARE Programmi e dati che indicano al computer come svolgere un determinato compito Programma: sequenza di istruzioni, scritte in un determinato linguaggio, con le quali si fa eseguire
Sistema Operativo. (hardware e software) della della macchina
 della della macchina") Sistema Operativo Senza Sistema Operativo (SO) un computer è solo un macchinario inutile... Il SO rende possibile la gestione, elaborazione e immagazinamento dell informazione. Il Il SO SO è il il software
Sistema Operativo Senza Sistema Operativo (SO) un computer è solo un macchinario inutile... Il SO rende possibile la gestione, elaborazione e immagazinamento dell informazione. Il Il SO SO è il il software
Hardware e Software. I.I.S.S. E. Majorana Gela. Tecnologie Informatiche. Prof. Gaetano Impoco
 Hardware e Software I.I.S.S. E. Majorana Gela Tecnologie Informatiche Prof. Gaetano Impoco Definizioni di Base Hardware (HW) Parte fisica del computer Software (SW) Insieme di programmi e procedure per
Hardware e Software I.I.S.S. E. Majorana Gela Tecnologie Informatiche Prof. Gaetano Impoco Definizioni di Base Hardware (HW) Parte fisica del computer Software (SW) Insieme di programmi e procedure per
Architettura dei calcolatori e Software di sistema
 Università degli Studi di Palermo Dipartimento di Ingegneria Chimica, Gestionale, Informatica, Meccanica Lezioni di Informatica di Base per la Facoltà di Lettere e Filosofia Anno Accademico 2012/20103
Università degli Studi di Palermo Dipartimento di Ingegneria Chimica, Gestionale, Informatica, Meccanica Lezioni di Informatica di Base per la Facoltà di Lettere e Filosofia Anno Accademico 2012/20103
Proposte di Tesi di Laurea
 A3R S.r.l. via E. Ortolani 102, 00125, Rome, Italy Tel. +39 06 60513522, Fax. +39 06 96708536, www.a3r.it A3R, 2010; all rights reserved THIS PAGE IS INTENTIONALLY LEFT BLANK 1. CONTROLLORE DISCRETO MIMO
A3R S.r.l. via E. Ortolani 102, 00125, Rome, Italy Tel. +39 06 60513522, Fax. +39 06 96708536, www.a3r.it A3R, 2010; all rights reserved THIS PAGE IS INTENTIONALLY LEFT BLANK 1. CONTROLLORE DISCRETO MIMO
UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO. in ambiente Matlab/Simulink. dott. G. Fenu Tecnologie per l automazione
 UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO in ambiente Matlab/Simulink dott. G. Fenu Tecnologie per l automazione Argomenti Presentazione del laboratorio e del sistema da controllare
UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO in ambiente Matlab/Simulink dott. G. Fenu Tecnologie per l automazione Argomenti Presentazione del laboratorio e del sistema da controllare
Ingegneria e Tecnologie dei Sistemi di Controllo. Sistemi di controllo industriale general-purpose: PLC
 Ingegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose: PLC Prof. Alberto Tonielli, Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail:
Ingegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose: PLC Prof. Alberto Tonielli, Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail:
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A Pietro Frasca.
 Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2016-17 Pietro Frasca Lezione 4 Giovedì 20-10-2016 Struttura e organizzazione software dei sistemi
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2016-17 Pietro Frasca Lezione 4 Giovedì 20-10-2016 Struttura e organizzazione software dei sistemi
Tecnologie Informatiche. Il software: I Sistemi Operativi
 Tecnologie Informatiche Il software: I Sistemi Operativi Il Software Sono la componente logica del computer. I programmi, cioè gli elenchi di istruzioni che permettono all elaboratore di svolgere determinati
Tecnologie Informatiche Il software: I Sistemi Operativi Il Software Sono la componente logica del computer. I programmi, cioè gli elenchi di istruzioni che permettono all elaboratore di svolgere determinati
Introduzione ai sistemi operativi
 Corso di laurea in Ingegneria dell Informazione Indirizzo Informatica Reti e sistemi operativi Introduzione ai sistemi operativi Contatti Docente: Alberto Pretto Ricevimento pretto@dis.uniroma1.it Appuntamento
Corso di laurea in Ingegneria dell Informazione Indirizzo Informatica Reti e sistemi operativi Introduzione ai sistemi operativi Contatti Docente: Alberto Pretto Ricevimento pretto@dis.uniroma1.it Appuntamento
INFORMATICA. L informatica comprende:
 Varie definizioni: INFORMATICA Scienza degli elaboratori elettronici (Computer Science) Scienza dell informazione Definizione proposta: Scienza della rappresentazione e dell elaborazione dell informazione
Varie definizioni: INFORMATICA Scienza degli elaboratori elettronici (Computer Science) Scienza dell informazione Definizione proposta: Scienza della rappresentazione e dell elaborazione dell informazione
Visione real-time: Elaborazione delle immagini direttamente nel PLC Mahmood Talouzi, Technical Support Engineer, Beckhoff Automation
 Visione real-time: Elaborazione delle immagini direttamente nel PLC Mahmood Talouzi, Technical Support Engineer, Beckhoff Automation Smart Vision - Le tecnologie per l industria del futuro Agenda Sistemi
Visione real-time: Elaborazione delle immagini direttamente nel PLC Mahmood Talouzi, Technical Support Engineer, Beckhoff Automation Smart Vision - Le tecnologie per l industria del futuro Agenda Sistemi
I SISTEMI OPERATIVI. Insieme di programmi che implementano funzioni essenziali per l uso di un sistema elaboratore.
 I SISTEMI OPERATIVI Insieme di programmi che implementano funzioni essenziali per l uso di un sistema elaboratore. Le funzioni di un S.O. non sono definibili in modo esaustivo e puntuale così come non
I SISTEMI OPERATIVI Insieme di programmi che implementano funzioni essenziali per l uso di un sistema elaboratore. Le funzioni di un S.O. non sono definibili in modo esaustivo e puntuale così come non
Sistemi Di Elaborazione Dell informazione
 Sistemi Di Elaborazione Dell informazione Dott. Antonio Calanducci Lezione II: Software Corso di Laurea in Scienze della Comunicazione Anno accademico 2009/2010 Tipi di software Software di sistema (o
Sistemi Di Elaborazione Dell informazione Dott. Antonio Calanducci Lezione II: Software Corso di Laurea in Scienze della Comunicazione Anno accademico 2009/2010 Tipi di software Software di sistema (o
Sistemi e Tecnologie per l'automazione LS
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS Programmable Logic Controllers Ing. Andrea
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS Programmable Logic Controllers Ing. Andrea
Finalità del corso Argomenti trattati Materiale didattico Calendario Modalità d esame Possibili progetti
 Politecnico di Milano Embedded Systems Anno Accademico 2009-10 Lecturer: Prof. William Fornaciari Politecnico di Milano, DEI fornacia@elet.polimi.it home.dei.polimi.it/fornacia Sommario Finalità del corso
Politecnico di Milano Embedded Systems Anno Accademico 2009-10 Lecturer: Prof. William Fornaciari Politecnico di Milano, DEI fornacia@elet.polimi.it home.dei.polimi.it/fornacia Sommario Finalità del corso
Ingegneria e Tecnologie dei Sistemi di Controllo. Sistemi di controllo industriale general-purpose. purpose: : PLC.
 Ingegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose purpose: : PLC Prof. Alberto Tonielli, Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna
Ingegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose purpose: : PLC Prof. Alberto Tonielli, Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna
Informatica Generale 07 - Sistemi Operativi:Gestione dei processi
 Informatica Generale 07 - Sistemi Operativi:Gestione dei processi Cosa vedremo: Esecuzione di un programma Concetto di processo Interruzioni Sistemi monotasking e multitasking Time-sharing Tabella dei
Informatica Generale 07 - Sistemi Operativi:Gestione dei processi Cosa vedremo: Esecuzione di un programma Concetto di processo Interruzioni Sistemi monotasking e multitasking Time-sharing Tabella dei
EcoRemote SISTEMA DI GESTIONE DI UNA STAZIONE DI MONITORAGGIO DELLA QUALITÀ DELL ARIA. Ingegneria dei sistemi
 Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Sistemi Operativi: Concetti Introduttivi
 Sistemi Operativi: Concetti Introduttivi 1.1 Principali funzioni di un Sistema Operativo 1.2 Cenni Storici 1.3 Classificazione dei Sistemi Operativi 1.4 Struttura dei Sistemi Operativi 1.5 Processi e gestione
Sistemi Operativi: Concetti Introduttivi 1.1 Principali funzioni di un Sistema Operativo 1.2 Cenni Storici 1.3 Classificazione dei Sistemi Operativi 1.4 Struttura dei Sistemi Operativi 1.5 Processi e gestione
Componenti di un sistema di acquisizione dati
 Componenti di un sistema di acquisizione dati Ingresso analogico Trasduzione e condizionamento del segnale Campionamento e Conversione A/D Elaborazione del segnale x(t) u(t) Grandezza fisica Grandezza
Componenti di un sistema di acquisizione dati Ingresso analogico Trasduzione e condizionamento del segnale Campionamento e Conversione A/D Elaborazione del segnale x(t) u(t) Grandezza fisica Grandezza
Elementi di Informatica A. A. 2016/2017
 Elementi di Informatica A. A. 2016/2017 Ing. Nicola Amatucci Università degli studi di Napoli Federico II Scuola Politecnica e Delle Scienze di Base nicola.amatucci@unina.it Cos'è un Sistema Operativo?
Elementi di Informatica A. A. 2016/2017 Ing. Nicola Amatucci Università degli studi di Napoli Federico II Scuola Politecnica e Delle Scienze di Base nicola.amatucci@unina.it Cos'è un Sistema Operativo?
Informatica 3. LEZIONE 1: Introduzione. Modulo 1: Introduzione al corso Modulo 2: Introduzione ai linguaggi di programmazione
 Informatica 3 LEZIONE 1: Introduzione Modulo 1: Introduzione al corso Modulo 2: Introduzione ai linguaggi di Informatica 3 Lezione 1- Modulo 1 Introduzione al corso Introduzione Corso di Informatica 3
Informatica 3 LEZIONE 1: Introduzione Modulo 1: Introduzione al corso Modulo 2: Introduzione ai linguaggi di Informatica 3 Lezione 1- Modulo 1 Introduzione al corso Introduzione Corso di Informatica 3
Introduzione a Simulink
 Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
SISTEMI OPERATIVI. Struttura dei. Sistemi Operativi. Giorgio Giacinto 2015
 SISTEMI OPERATIVI Struttura dei Sistemi Operativi 2 Panoramica dei servizi del sistema operativo 3 4 Cos è una chiamata al sistema?» Il SO mette a disposizione i suoi servizi ai programmi utente attraverso
SISTEMI OPERATIVI Struttura dei Sistemi Operativi 2 Panoramica dei servizi del sistema operativo 3 4 Cos è una chiamata al sistema?» Il SO mette a disposizione i suoi servizi ai programmi utente attraverso
Il Sistema Operativo
 Corso di Alfabetizzazione Informatica 2003/2004 Il Sistema Operativo Modello di von Neumann Bus di sistema CPU Memoria Centrale Memoria di Massa Interfaccia Periferica 1 Interfaccia Periferica 2 Il computer
Corso di Alfabetizzazione Informatica 2003/2004 Il Sistema Operativo Modello di von Neumann Bus di sistema CPU Memoria Centrale Memoria di Massa Interfaccia Periferica 1 Interfaccia Periferica 2 Il computer
SISTEMI OPERATIVI THREAD. Giorgio Giacinto Sistemi Operativi
 SISTEMI OPERATIVI THREAD 2 Motivazioni» Un programma complesso può eseguire in modo concorrente più funzioni attraverso la creazione e gestione di processi figli attraverso il meccanismo dei thread» La
SISTEMI OPERATIVI THREAD 2 Motivazioni» Un programma complesso può eseguire in modo concorrente più funzioni attraverso la creazione e gestione di processi figli attraverso il meccanismo dei thread» La
Ingegneria e Tecnologie dei Sistemi di Controllo. Unità di Elaborazione: MicroControllori e DSP
 Ingegneria e Tecnologie dei Sistemi di Controllo Unità di Elaborazione: MicroControllori e DSP Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail: atilli@deis.unibo.it Revisionato:
Ingegneria e Tecnologie dei Sistemi di Controllo Unità di Elaborazione: MicroControllori e DSP Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail: atilli@deis.unibo.it Revisionato:
Controllori industriali: PLC
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS Programmable Logic Controllers Ing. Andrea
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS Programmable Logic Controllers Ing. Andrea
Macchine Astratte. Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari. Linguaggi di Programmazione feb, 2016
 Macchine Astratte Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari Linguaggi di Programmazione 010194 29 feb, 2016 Sommario 1 Introduzione Macchina astratta Interprete Implementazione
Macchine Astratte Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari Linguaggi di Programmazione 010194 29 feb, 2016 Sommario 1 Introduzione Macchina astratta Interprete Implementazione
Ingegneria e Tecnologie dei Sistemi di Controllo. Sistemi di controllo industriale general-purpose: PLC. Sistemi di controllo industriale: PLC
 Ingegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose: PLC Prof. Alberto Tonielli, Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail:
Ingegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose: PLC Prof. Alberto Tonielli, Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail:
Informatica 3. Informatica 3. Lezione 1- Modulo 1. LEZIONE 1: Introduzione. Concetti di linguaggi di programmazione. Introduzione
 Informatica 3 Informatica 3 LEZIONE 1: Introduzione Lezione 1- Modulo 1 Modulo 1: Introduzione al corso Modulo 2: Introduzione ai linguaggi di Introduzione al corso Politecnico di Milano - Prof. Sara Comai
Informatica 3 Informatica 3 LEZIONE 1: Introduzione Lezione 1- Modulo 1 Modulo 1: Introduzione al corso Modulo 2: Introduzione ai linguaggi di Introduzione al corso Politecnico di Milano - Prof. Sara Comai
LE ALTRE BOARD ARDUINO
 LE ALTRE BOARD ARDUINO Nel corso degli anni la scheda Arduino si è evoluta. Dalla versione Diecimila alla versione Uno sono state apportate diverse migliorie. L ultima release della Board Uno, la REV3,
LE ALTRE BOARD ARDUINO Nel corso degli anni la scheda Arduino si è evoluta. Dalla versione Diecimila alla versione Uno sono state apportate diverse migliorie. L ultima release della Board Uno, la REV3,
Fondamenti Teorici. Antonio Pescapè e Marcello Esposito Parte Quarta v1.0
 Fondamenti Teorici Antonio Pescapè e Marcello Esposito Parte Quarta v1.0 Agenda Ambiente di sviluppo del software Le fasi di sviluppo del programma La documentazione dei programmi Errori di programmazione
Fondamenti Teorici Antonio Pescapè e Marcello Esposito Parte Quarta v1.0 Agenda Ambiente di sviluppo del software Le fasi di sviluppo del programma La documentazione dei programmi Errori di programmazione
Sistemi e Tecnologie per l'automazione LS. HW per elaborazione digitale in automazione: Microcontrollori e DSP
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Introduzione. Caratteristiche generali. Sistemi e Tecnologie per l'automazione LS. HW per elaborazione digitale in automazione: Microcontrollori e DSP
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS HW per elaborazione digitale in automazione:
Avvio alla programmazione CoDeSys serie IEC-line. aggiornamento:
 Avvio alla programmazione CoDeSys serie IEC-line aggiornamento: 16-06-2017 IEC-line by OVERDIGIT overdigit.com 1. Programmazione CoDeSys Il tool di sviluppo CoDeSys comprende una dettagliata documentazione
Avvio alla programmazione CoDeSys serie IEC-line aggiornamento: 16-06-2017 IEC-line by OVERDIGIT overdigit.com 1. Programmazione CoDeSys Il tool di sviluppo CoDeSys comprende una dettagliata documentazione
I sistemi operativi (prima parte) Agostino Lorenzi I sistemi operativi - Atlas
 Agostino Lorenzi I sistemi operativi - Atlas") I sistemi operativi (prima parte) Le esigenze dell informatica moderna Computer facili da usare Gestione di grandi archivi di dati Esecuzione di più programmi sulla stessa macchina Collegamento in rete
I sistemi operativi (prima parte) Le esigenze dell informatica moderna Computer facili da usare Gestione di grandi archivi di dati Esecuzione di più programmi sulla stessa macchina Collegamento in rete
Sistemi Operativi: Concetti generali. Sistemi Operativi: Concetti generali
 Servizi fondamentali di un Sistema Operativo Classificazione dei Sistemi Operativi secondo l ut Servizi fondamentali di un Sistema Operativo Classificazione dei Sistemi Operativi secondo l ut Concetti
Servizi fondamentali di un Sistema Operativo Classificazione dei Sistemi Operativi secondo l ut Servizi fondamentali di un Sistema Operativo Classificazione dei Sistemi Operativi secondo l ut Concetti
Sistemi Operativi ed interazione con HW e CAD
 Sistemi Operativi ed interazione con HW e CAD Corsi di Informatica Grafica Prof. Manuel Roveri Indice Il Sistema Operativo Software di sistema e applicativo Architettura di un sistema operativo Classificazione
Sistemi Operativi ed interazione con HW e CAD Corsi di Informatica Grafica Prof. Manuel Roveri Indice Il Sistema Operativo Software di sistema e applicativo Architettura di un sistema operativo Classificazione
How smart are you? DATA CENTER CLIENTE TOSIBOX EK-IB1
 SMART-U SMART-U017IT How smart are you? SMART-U (EK-IB1 - EK-IC1) è il nuovo prodotto Ekinex nato per offrire una soluzione di Controllo Remoto e Monitoraggio che integri in un solo dispositivo le caratteristiche
SMART-U SMART-U017IT How smart are you? SMART-U (EK-IB1 - EK-IC1) è il nuovo prodotto Ekinex nato per offrire una soluzione di Controllo Remoto e Monitoraggio che integri in un solo dispositivo le caratteristiche
Il robot mobile SuperMario
 Il robot mobile SuperMario i robot mobili struttura meccanica struttura H/W struttura S/W I due estremi Veicolo telecomandato Esplorazioni e piccole operazioni remote Necessità dell operatore in linea
Il robot mobile SuperMario i robot mobili struttura meccanica struttura H/W struttura S/W I due estremi Veicolo telecomandato Esplorazioni e piccole operazioni remote Necessità dell operatore in linea
PECUP ELETTRONICA ED ELETTROTECNICA ELETTROTECNICA SISTEMI AUTOMATICI TERZO COMPETENZE ABILITA' CONOSCENZE
 ISTITUTO TECNICO INDUSTRIALE STATALE Enrico Fermi Via Capitano di Castri - 72021 FRANCAVILLA FONTANA (BR) Specializzazioni: ELETTRONICA E TELECOM. - ELETTROTECNICA E AUTOM. INFORMATICA - MECCANICA Tel.
ISTITUTO TECNICO INDUSTRIALE STATALE Enrico Fermi Via Capitano di Castri - 72021 FRANCAVILLA FONTANA (BR) Specializzazioni: ELETTRONICA E TELECOM. - ELETTROTECNICA E AUTOM. INFORMATICA - MECCANICA Tel.
Introduzione ecos. Agenda. Giovanni Perbellini
 Introduzione ecos Giovanni Perbellini Agenda Introduzione ecos Toolchain Download codice sorgente Binutils GCC/G++ Newlib GDB/Insight Compilazione toolchain Selezione Target Compilazione ecos Configtool
Introduzione ecos Giovanni Perbellini Agenda Introduzione ecos Toolchain Download codice sorgente Binutils GCC/G++ Newlib GDB/Insight Compilazione toolchain Selezione Target Compilazione ecos Configtool
Fondamenti di Informatica. Ingegneria elettronica
 Fondamenti di Informatica Ingegneria elettronica Prima esercitazione Cecilia Catalano Sistema Operativo Il S.O. è costituito da un insieme di programmi che permettono di utilizzare e gestire tutte le risorse
Fondamenti di Informatica Ingegneria elettronica Prima esercitazione Cecilia Catalano Sistema Operativo Il S.O. è costituito da un insieme di programmi che permettono di utilizzare e gestire tutte le risorse
TECNOLOGIA SISTEMI OPERATIVI
 TECNOLOGIA SISTEMI OPERATIVI DEFINIZIONE CARATTERISTICHE GENERALI Un sistema operativo (abbreviato in SO, in lingua inglese OS, "operating system"), in informatica, è un insieme di componenti software,
TECNOLOGIA SISTEMI OPERATIVI DEFINIZIONE CARATTERISTICHE GENERALI Un sistema operativo (abbreviato in SO, in lingua inglese OS, "operating system"), in informatica, è un insieme di componenti software,
Ingegneria e Tecnologie dei Sistemi di Controllo. Sistemi di controllo industriale general-purpose: PLC. Sistemi di controllo industriale: PLC
 ngegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose: PLC Prof. Alberto Tonielli, ng. Andrea Tilli DES Alma Mater Studiorum Università di Bologna E-Mail: atonielli,
ngegneria e Tecnologie dei Sistemi di Controllo Sistemi di controllo industriale general-purpose: PLC Prof. Alberto Tonielli, ng. Andrea Tilli DES Alma Mater Studiorum Università di Bologna E-Mail: atonielli,
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 2 PLC - Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Cos è un PLC PLC: Programmable Logic Controller
Corso di Automazione industriale Lezione 2 PLC - Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Cos è un PLC PLC: Programmable Logic Controller
Model-Based-Design in F1
 Model-Based-Design in F1 Team-development e generazione codice in ambienti con un breve time-to-market Riccardo Lodini Indice Ferrari GES Scuderia La storia dell elettronica in F1 Principali controlli
Model-Based-Design in F1 Team-development e generazione codice in ambienti con un breve time-to-market Riccardo Lodini Indice Ferrari GES Scuderia La storia dell elettronica in F1 Principali controlli
Esperienze di Telemisura e problematiche di condivisione di risorse di laboratorio
 Workshop Telemisure Bologna 25 Febbraio 2004 Esperienze di Telemisura e problematiche di condivisione di risorse di laboratorio Gli utenti possono accedere via WEB alla strumentazione di misura mediante
Workshop Telemisure Bologna 25 Febbraio 2004 Esperienze di Telemisura e problematiche di condivisione di risorse di laboratorio Gli utenti possono accedere via WEB alla strumentazione di misura mediante
2. Finalità generali previste dalle indicazioni nazionali
 2. Finalità generali previste dalle indicazioni nazionali Le Linee Guida ministeriali per i curricola del Secondo biennio dell Istituto Tecnico Tecnologico, Indirizzo Informatica e Telecomunicazioni -
2. Finalità generali previste dalle indicazioni nazionali Le Linee Guida ministeriali per i curricola del Secondo biennio dell Istituto Tecnico Tecnologico, Indirizzo Informatica e Telecomunicazioni -
Macchina di Riferimento: argomenti
 Macchina di Riferimento: argomenti L'architettura di una macchina MIPS Organizzazione della memoria I registri della CPU L'esecuzione dei programmi Il ciclo fetch-execute Il simulatore SPIM 1 Architettura
Macchina di Riferimento: argomenti L'architettura di una macchina MIPS Organizzazione della memoria I registri della CPU L'esecuzione dei programmi Il ciclo fetch-execute Il simulatore SPIM 1 Architettura
Intel Parallel Studio Seminar Milano 22 Giugno 2010
 Dal seriale al parallelo Come ottimizzare le applicazioni Visual Studio per macchine multi-core: Intel Parallel Studio Ciro Fiorillo Lead Software Architect Agenda 09:15 Saluto di benvenuto e apertura
Dal seriale al parallelo Come ottimizzare le applicazioni Visual Studio per macchine multi-core: Intel Parallel Studio Ciro Fiorillo Lead Software Architect Agenda 09:15 Saluto di benvenuto e apertura
CPX-FB40 Ethernet POWERLINK
 CPX-FB40 Ethernet POWERLINK Overview Cosa richiedono i nostri clienti? Applicazioni tipiche La piattaforma CPX Ulteriori benefici Overview Con il nuovo nodo POWERLINK è possibile integrare direttamente
CPX-FB40 Ethernet POWERLINK Overview Cosa richiedono i nostri clienti? Applicazioni tipiche La piattaforma CPX Ulteriori benefici Overview Con il nuovo nodo POWERLINK è possibile integrare direttamente
Sistemi e Tecnologie per l'automazione LM
 Laurea Magistrale in Ingegneria Informatica Laurea Magistrale in Ingegneria Elettronica e Telecomunicazioni per lo Sviluppo Sostenibile Sistemi e Tecnologie per l'automazione LM Programmable Logic Controllers
Laurea Magistrale in Ingegneria Informatica Laurea Magistrale in Ingegneria Elettronica e Telecomunicazioni per lo Sviluppo Sostenibile Sistemi e Tecnologie per l'automazione LM Programmable Logic Controllers
TIA Portal Frequently Asked Questions. For internal use only / Siemens Spa All Rights Reserved.
 Frequently Asked Questions Generale TIA Portal Il Totally Integrated Automation Portal V11 costituisce un framework di base, condiviso dalle nuove versioni di SIMATIC Step 7 e SIMATIC WinCC. L innesto
Frequently Asked Questions Generale TIA Portal Il Totally Integrated Automation Portal V11 costituisce un framework di base, condiviso dalle nuove versioni di SIMATIC Step 7 e SIMATIC WinCC. L innesto
Il sistema è basato sulla scheda CTXA9, studiata espressamente per far girare sia il software di controllo dei processi
 Sistema Sirio SR07SE SISTEMA CNC E PLC CON INTERFACCIA CANBUS, ETHERCAT E MODULO DI ESPANSIONE I/O. Il sistema Sirio modello SR07SE è un pannello operatore composto da un display LCD 7 a colori, con Touch
Sistema Sirio SR07SE SISTEMA CNC E PLC CON INTERFACCIA CANBUS, ETHERCAT E MODULO DI ESPANSIONE I/O. Il sistema Sirio modello SR07SE è un pannello operatore composto da un display LCD 7 a colori, con Touch
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 2 PLC - Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, M. Ermidoro 1 Cos è un PLC PLC: Programmable Logic Controller Unità
Corso di Automazione industriale Lezione 2 PLC - Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, M. Ermidoro 1 Cos è un PLC PLC: Programmable Logic Controller Unità
Il Sistema Operativo Ripasso
 ISTITUTO TECNICO SECONDO BIENNIO GIORGIO PORCU www.thegiorgio.it Sommario Concetti di base Sistema Operativo Risorse Funzioni e Struttura Bootstrap, Kernel, Shell Gestione dei Processi Processo e PCB Algoritmi
ISTITUTO TECNICO SECONDO BIENNIO GIORGIO PORCU www.thegiorgio.it Sommario Concetti di base Sistema Operativo Risorse Funzioni e Struttura Bootstrap, Kernel, Shell Gestione dei Processi Processo e PCB Algoritmi
Architettura di un sistema operativo
 Architettura di un sistema operativo Dipartimento di Informatica Università di Verona, Italy Struttura di un S.O. Sistemi monolitici Sistemi a struttura semplice Sistemi a livelli Virtual Machine Sistemi
Architettura di un sistema operativo Dipartimento di Informatica Università di Verona, Italy Struttura di un S.O. Sistemi monolitici Sistemi a struttura semplice Sistemi a livelli Virtual Machine Sistemi
PROGETTO DI DI SISTEMI DI DI DSP
 PROGETTO DI DI SISTEMI DI DI DSP INTRODUZIONE 2 I primi sistemi di DSP furono sviluppati intorno al 1950 con l obiettivo di simulare sistemi analogici (e testarne le prestazioni) in fase di progettazione,
PROGETTO DI DI SISTEMI DI DI DSP INTRODUZIONE 2 I primi sistemi di DSP furono sviluppati intorno al 1950 con l obiettivo di simulare sistemi analogici (e testarne le prestazioni) in fase di progettazione,
Simulazione e Controllo in Tempo Reale di Meccanismi Aerospaziali con Software Multicorpo di Uso Generale
 Simulazione e Controllo in Tempo Reale di Meccanismi Aerospaziali con Software Multicorpo di Uso Generale (General-Purpose Multibody Real-Time Simulation and Control of Aerospace Mechanisms) Marco Morandini,
Simulazione e Controllo in Tempo Reale di Meccanismi Aerospaziali con Software Multicorpo di Uso Generale (General-Purpose Multibody Real-Time Simulation and Control of Aerospace Mechanisms) Marco Morandini,
Buildroot. Making Embedded Linux Easy. Luca Ceresoli Linux Day 2018 BgLUG
 Buildroot Making Embedded Linux Easy Luca Ceresoli luca@lucaceresoli.net http://lucaceresoli.net Linux Day 2018 BgLUG Agenda Introduzione Buildroot Packages Conclusioni 1 Introduzione Che cosa è un sistema
Buildroot Making Embedded Linux Easy Luca Ceresoli luca@lucaceresoli.net http://lucaceresoli.net Linux Day 2018 BgLUG Agenda Introduzione Buildroot Packages Conclusioni 1 Introduzione Che cosa è un sistema
Summer of LabVIEW The Sunny Side of System Design
 Summer of LabVIEW The Sunny Side of System Design 30th June - 18th July 1 Monitoraggio real-time di pulsazioni di pressione in camera di combustione di turbine a gas Giacomo Bartolini SINT Technology
Summer of LabVIEW The Sunny Side of System Design 30th June - 18th July 1 Monitoraggio real-time di pulsazioni di pressione in camera di combustione di turbine a gas Giacomo Bartolini SINT Technology
HMI HUMAN MACHINE INTERFACE
 HMI HUMAN MACHINE INTERFACE LRH Utilizzo immediato grazie agli scenari LOVATO Electric! SEMPLICITÀ ED EFFICIENZA Design semplice e a basso consumo di energia Componenti industriali ad alta affidabilità.
HMI HUMAN MACHINE INTERFACE LRH Utilizzo immediato grazie agli scenari LOVATO Electric! SEMPLICITÀ ED EFFICIENZA Design semplice e a basso consumo di energia Componenti industriali ad alta affidabilità.
Aiutiamo i nostri clienti ad incorporare connettività, servizi web, embedded computing e automazione nei loro prodotti e soluzioni.
 Costruiamo con voi i prodotti di successo del futuro Edge devices Business Intelligence Industrial IoT gateways and cloud platform for fast deployment of IoT applications for Unattended, mission critical
Costruiamo con voi i prodotti di successo del futuro Edge devices Business Intelligence Industrial IoT gateways and cloud platform for fast deployment of IoT applications for Unattended, mission critical
Sistemi Operativi. Introduzione. C.d.L. in Informatica (laurea triennale) Anno Accademico Dipartimento di Matematica e Informatica Catania
 Anno Accademico Dipartimento di Matematica e Informatica Catania") Sistemi Operativi C.d.L. in Informatica (laurea triennale) Anno Accademico 2018-2019 Dipartimento di Matematica e Informatica Catania Introduzione Prof. Mario Di Raimondo Sistemi Operativi 9 CFU (72 ore)
Sistemi Operativi C.d.L. in Informatica (laurea triennale) Anno Accademico 2018-2019 Dipartimento di Matematica e Informatica Catania Introduzione Prof. Mario Di Raimondo Sistemi Operativi 9 CFU (72 ore)
Docenti Marco Cirrito, Pier Luigi Girelli. Disciplina. OBIETTIVI MINIMI (necessari al passaggio alla classe successiva)
") Anno Scolastico 2018/2019 PROGRAMMA DIDATTICO CONSUNTIVO CLASSE 1ME Docenti Marco Cirrito, Pier Luigi Girelli Disciplina Tecnologie Informatiche OBIETTIVI MINIMI (necessari al passaggio alla classe successiva)
Anno Scolastico 2018/2019 PROGRAMMA DIDATTICO CONSUNTIVO CLASSE 1ME Docenti Marco Cirrito, Pier Luigi Girelli Disciplina Tecnologie Informatiche OBIETTIVI MINIMI (necessari al passaggio alla classe successiva)
Sistemi Operativi per Sistemi di Elaborazione Ubiqui
 Griglie e Sistemi di Elaborazione Ubiqui Sistemi Operativi per Sistemi di Elaborazione Ubiqui Griglie e Sistemi Ubiqui - D. Talia - UNICAL 1 Sistemi Operativi per Ubiquitous Computing Palm OS Symbian OS
Griglie e Sistemi di Elaborazione Ubiqui Sistemi Operativi per Sistemi di Elaborazione Ubiqui Griglie e Sistemi Ubiqui - D. Talia - UNICAL 1 Sistemi Operativi per Ubiquitous Computing Palm OS Symbian OS
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A Pietro Frasca.
 Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2016-17 Pietro Frasca Lezione 11 Giovedì 17-11-2016 1 Gestione della memoria La memoria principale
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2016-17 Pietro Frasca Lezione 11 Giovedì 17-11-2016 1 Gestione della memoria La memoria principale
Sistemi Operativi per Sistemi di Elaborazione Ubiqui
 Griglie e Sistemi di Elaborazione Ubiqui Sistemi Operativi per Sistemi di Elaborazione Ubiqui Griglie e Sistemi Ubiqui - D. Talia - UNICAL 1 Sistemi Operativi per Ubiquitous Computing Palm OS Symbian OS
Griglie e Sistemi di Elaborazione Ubiqui Sistemi Operativi per Sistemi di Elaborazione Ubiqui Griglie e Sistemi Ubiqui - D. Talia - UNICAL 1 Sistemi Operativi per Ubiquitous Computing Palm OS Symbian OS
Esempi di possibili domande d esame.
 INFORMATICA INDUSTRIALE N.O. Esempi di possibili domande d esame. N.B. ogni prova scritta prevede indicativamente 3 o 4 domande. Indicare brevemente le operazioni svolte dal LIVELLO DI ACQUISIZIONE durante
INFORMATICA INDUSTRIALE N.O. Esempi di possibili domande d esame. N.B. ogni prova scritta prevede indicativamente 3 o 4 domande. Indicare brevemente le operazioni svolte dal LIVELLO DI ACQUISIZIONE durante
the best for best industry 4.0 Since 1995
 the best for best industry 4.0 Since 1995 Digital Control Systems Comunication Protocol Human Machine Interface Digital Control Systems SCHEDE MICROCONTROLLORE SISTEMI EMBEDDED ED IoT ELETTRONICA ANALOGICA
the best for best industry 4.0 Since 1995 Digital Control Systems Comunication Protocol Human Machine Interface Digital Control Systems SCHEDE MICROCONTROLLORE SISTEMI EMBEDDED ED IoT ELETTRONICA ANALOGICA
Traduzione e interpretazione
 Traduzione e interpretazione Parte dei lucidi sono stati gentilmente forniti dal Prof. Salza VII.1 Linguaggi di programmazione Linguaggi ad alto livello Maggiore espressività Maggiore produttività Migliore
Traduzione e interpretazione Parte dei lucidi sono stati gentilmente forniti dal Prof. Salza VII.1 Linguaggi di programmazione Linguaggi ad alto livello Maggiore espressività Maggiore produttività Migliore
Introduzione a GCC: GNU Compiler Collection
 Introduzione a GCC: GNU Compiler Collection Caratteristiche di GCC Compilatore multipiattaforma modulare Disponibile per tutti i principali sistemi operativi Può produrre programmi per la maggior parte
Introduzione a GCC: GNU Compiler Collection Caratteristiche di GCC Compilatore multipiattaforma modulare Disponibile per tutti i principali sistemi operativi Può produrre programmi per la maggior parte
Stack EtherCAT Master e Slave Koenig sul campo
 Stack EtherCAT Master e Slave Koenig sul campo Gianluigi Magnasco easitec S.r.l. gianluigi.magnasco@easitec.it Chi è easitec S.r.l. L offerta di prodotti EtherCAT di easitec ed EtherCAT Soluzioni KPA per
Stack EtherCAT Master e Slave Koenig sul campo Gianluigi Magnasco easitec S.r.l. gianluigi.magnasco@easitec.it Chi è easitec S.r.l. L offerta di prodotti EtherCAT di easitec ed EtherCAT Soluzioni KPA per
Meccatronica? Flavio Corradini CF3000 Engineering & Electronics Group
 Meccanica + Elettronica = Meccatronica? Flavio Corradini CF3000 Engineering & Electronics Group 1 Automotive Electronics Nautical Electronics 2 Dispositivi Meccatronici =? Dispositivi in cui sono integrati
Meccanica + Elettronica = Meccatronica? Flavio Corradini CF3000 Engineering & Electronics Group 1 Automotive Electronics Nautical Electronics 2 Dispositivi Meccatronici =? Dispositivi in cui sono integrati
ax Multi-Axis Brushless Servodrive
 POWERED BY PROGETTAZIONE E PRODUZIONE ELETTRONICA CUSTOM SVILUPPO E PROGETTAZIONE AZIONAMENTI INTEGRAZIONE DI SISTEMI PROGETTAZIONE ELETTRONICA SISTEMI DI MOTION CONTROL PROGETTAZIONE SOFTWARE ax Multi-Axis
POWERED BY PROGETTAZIONE E PRODUZIONE ELETTRONICA CUSTOM SVILUPPO E PROGETTAZIONE AZIONAMENTI INTEGRAZIONE DI SISTEMI PROGETTAZIONE ELETTRONICA SISTEMI DI MOTION CONTROL PROGETTAZIONE SOFTWARE ax Multi-Axis
La piattaforma MSITel
 La piattaforma MSITel Permette di gestire una console di terra in ogni parte del mondo mentre l esperimento su Pallone naviga ovunque MSITel fornisce una telemetria per esperimenti su pallone in tempo
La piattaforma MSITel Permette di gestire una console di terra in ogni parte del mondo mentre l esperimento su Pallone naviga ovunque MSITel fornisce una telemetria per esperimenti su pallone in tempo
Macchina Astratta: struttura e realizzazione.
 Macchina Astratta: struttura e realizzazione. Sommario Macchina Astratta e l interprete di Macchina Hight e Low Level Languages Implementazione di un Linguaggio Macchina Intermedia Gerarchia di Macchine
Macchina Astratta: struttura e realizzazione. Sommario Macchina Astratta e l interprete di Macchina Hight e Low Level Languages Implementazione di un Linguaggio Macchina Intermedia Gerarchia di Macchine
Corso di Informatica
 Corso di Informatica Modulo T1 3-Equipaggiamento di un SO 1 Prerequisiti Hardware e software Uso pratico elementare di un sistema operativo Struttura a strati del SO 2 1 Introduzione In questa Unità vogliamo
Corso di Informatica Modulo T1 3-Equipaggiamento di un SO 1 Prerequisiti Hardware e software Uso pratico elementare di un sistema operativo Struttura a strati del SO 2 1 Introduzione In questa Unità vogliamo
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A Pietro Frasca.
 Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2017-18 Pietro Frasca Lezione 4 Giovedì 12-10-2017 Struttura e organizzazione software dei sistemi
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2017-18 Pietro Frasca Lezione 4 Giovedì 12-10-2017 Struttura e organizzazione software dei sistemi
Introduzione ai thread
 Introduzione ai thread Processi leggeri. Immagine di un processo (codice, variabili locali e globali, stack, descrittore). Risorse possedute: : (file aperti, processi figli, dispositivi di I/O..),. L immagine
Introduzione ai thread Processi leggeri. Immagine di un processo (codice, variabili locali e globali, stack, descrittore). Risorse possedute: : (file aperti, processi figli, dispositivi di I/O..),. L immagine
Informatica Generale 06 - Introduzione ai Sistemi Operativi
 Informatica Generale 06 - Introduzione ai Sistemi Operativi Cosa vedremo: Funzionalità dei sistemi operativi Bootstrap Stato utente e stato supervisore Componenti di un Sistema Operativo Cos è un sistema
Informatica Generale 06 - Introduzione ai Sistemi Operativi Cosa vedremo: Funzionalità dei sistemi operativi Bootstrap Stato utente e stato supervisore Componenti di un Sistema Operativo Cos è un sistema
SISTEMI DI ELABORAZIONE A LIVELLO DI CELLA
 SISTEMI DI ELABORAZIONE A LIVELLO DI CELLA Varie tipologie: Robot Macchine a controllo numerico Unità intelligenti per il comando (comando, segnalazione, controllo, regolazione) Unità intelligenti per
SISTEMI DI ELABORAZIONE A LIVELLO DI CELLA Varie tipologie: Robot Macchine a controllo numerico Unità intelligenti per il comando (comando, segnalazione, controllo, regolazione) Unità intelligenti per
Laboratorio di elettronica 1
 Laboratorio di elettronica 1 Laboratorio di elettronica 2 Laboratorio di elettronica 3 Tipologie di analisi tramite PSPICE Laboratorio di elettronica 4 Nella versione Limiti studente della del versione
Laboratorio di elettronica 1 Laboratorio di elettronica 2 Laboratorio di elettronica 3 Tipologie di analisi tramite PSPICE Laboratorio di elettronica 4 Nella versione Limiti studente della del versione
1. Introduzione. 1.1 Precauzioni di sicurezza. 1.2 Sistema richiesto. 1.3 Contenuto del pacco
 1. Introduzione 1.1 Precauzioni di sicurezza Si prega di osservare tutte le precauzioni prima di utilizzare Prestigio Data Racer I, seguire tutte le procedure descritte in questo manuale e usare correttamente
1. Introduzione 1.1 Precauzioni di sicurezza Si prega di osservare tutte le precauzioni prima di utilizzare Prestigio Data Racer I, seguire tutte le procedure descritte in questo manuale e usare correttamente
EMBEDDED & MISSION CRITICAL. Engineering At Your Service INTEGRATED SYSTEMS INDUSTRIAL AUTOMATION
 EMBEDDED & MISSION CRITICAL INTEGRATED SYSTEMS INDUSTRIAL AUTOMATION Engineering At Your Service Engineering At Your Service COMPANY ALPHA SI opera nel settore del SW Embedded e Mission Critical inclusi
EMBEDDED & MISSION CRITICAL INTEGRATED SYSTEMS INDUSTRIAL AUTOMATION Engineering At Your Service Engineering At Your Service COMPANY ALPHA SI opera nel settore del SW Embedded e Mission Critical inclusi
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
Funzioni di un Calcolatore
 Funzioni di un Calcolatore elaborazione dei dati memorizzazione dei dati trasferimento dei dati controllo flessibilità nel calcolo modularità nell architettura scalabilità dei componenti standardizzazione
Funzioni di un Calcolatore elaborazione dei dati memorizzazione dei dati trasferimento dei dati controllo flessibilità nel calcolo modularità nell architettura scalabilità dei componenti standardizzazione
Sistema operativo & file system 1
 Il software (sw) Software di sistema e file system Lezione 1b L esecuzione di programmi è lo scopo di un elaboratore I programmi sono algoritmi codificati in un particolare linguaggio di programmazione
Il software (sw) Software di sistema e file system Lezione 1b L esecuzione di programmi è lo scopo di un elaboratore I programmi sono algoritmi codificati in un particolare linguaggio di programmazione
Informatica. Il computer
 Informatica per Igienisti Dentali LEZIONE 1 Il computer 1 INTRODUZIONE 2 I calcolatori L informatica È la disciplina scientifica che studia nati in risposta all esigenza di eseguire meccanicamente calcoli
Informatica per Igienisti Dentali LEZIONE 1 Il computer 1 INTRODUZIONE 2 I calcolatori L informatica È la disciplina scientifica che studia nati in risposta all esigenza di eseguire meccanicamente calcoli
Dal sistema operativo all' hardware
 Dal sistema operativo all' hardware Di cosa parleremo? Il computer (processore e memoria principale) Cosa avviene all'avvio del computer? Scheda madre Alimentatore Memorie Secondarie (floppy disk, hard
Dal sistema operativo all' hardware Di cosa parleremo? Il computer (processore e memoria principale) Cosa avviene all'avvio del computer? Scheda madre Alimentatore Memorie Secondarie (floppy disk, hard
PC-based Automation e sistemi distribuiti per l efficienza e flessibilità della Smart Factory. Angelo Caputi - Beckhoff Automation S.r.l.
 PC-based Automation e sistemi distribuiti per l efficienza e flessibilità della Smart Factory Angelo Caputi - Beckhoff Automation S.r.l. Innovazione continua per i Sistemi di Automazione Independent Cars
PC-based Automation e sistemi distribuiti per l efficienza e flessibilità della Smart Factory Angelo Caputi - Beckhoff Automation S.r.l. Innovazione continua per i Sistemi di Automazione Independent Cars