Laboratorio di Sistemi Autonomi Intelligenti
|
|
|
- Floriano Franceschini
- 5 anni fa
- Visualizzazioni
Transcript




1 Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab
2 Persone allo IAS-Lab Staff Enrico Pagello, Full Professor of Computer Science Emanuele Menegatti, Associate Professor Michele Moro, Assist. Professor Students Stefano Michieletto, PhD 3 rd year Matteo Munaro, PhD 3 rd year Filippo Basso, PhD 2 rd year Mauro Antonello, PhD 2 nd year Riccardo Levorato, PhD 2 nd year Elisa Tosello, PhD 1 st year Roberto Bortoletto, PhD 1 st year About 10 Master-level students Post-doc Luca Tonin, Post Doc Stefano Ghidoni, post-doc Collaboratorations Antonio D angelo and Claudio Mirolo, Assist. Prof.s at Udine University Stefano Carpin, Assoc. Prof. at Univ. ( USA ) of California Hiroshi Ishiguro, Prof. Univ. of Osaka (JAPAN) Tamio Arai, Prof. Univ. of Tokyo (Japan) Frank Dellaert, Prof. Georgia Teach Inst. (USA) Wolfram Burgard, Prof. Univ. of Freiburg (Germany) ( France ) Gostai URBI



3 Ricerca allo IAS-Lab Programmazione Robotica Visione Robotica & Sistemi di Visione Distribuita Visione per Robotica Industriale Localizzazione Robotica e Mappatura dell Ambiente tramite la Visione Robotica Umanoide Interazione Uomo Robot attraverso Tocco e Visione Integrazione dei Robot con Reti di Sensori Wireless

4 Progetti allo IAS-Lab Recently Funded Projects: EU-FoF 2011 Thermobot - Autonomous robotic system for thermo-graphic detection of cracks EU-RfSME 3DComplete - Efficient 3D Completeness Inspection EU-FSE 2009: isp - Innovative Simulation and Programming of robotics workcells idvs2 - Intelligent Distributed Audio and Video Surveillance System EU-FSE 2008: idvs: Intelligent Distributed Vision System for surveillance and quality inspection University of Padua 2009: Mobility, Perception, and Coordination for a Team of Autonomous Robots EU-Comenius2 2006: TERECoP: Teacher Education on Robotics-Enhanced Constructivist Pedagogical Methods

 Cilindro di perspex")
5 Visione Omnidirezionale Specchio Telecamera omnidirezionale: Specchio Convesso Telecamera Prospettica ( supporto ) Cilindro di perspex Telecamera

6 Mappatura con Visione Omnidirezionale Ricostruzione del percorso dell automobile solo dalle immagini riprese Ricostruzione 3D dell ambiente attraversato


7 Mappatura con Visione Omnidirezionale Ricostruzione del percorso dell automobile solo dalle immagini riprese Ricostruzione 3D dell ambiente attraversato



8 Reti di Telecamere e Algoritmi Distribuiti Point & Click Face Recognition Distribuito
9 Trasferimento Tecnologico allo IAS-Lab Applicazioni industriali

10 Dal 2005 abbiamo creato una spin-off dello IAS-Lab



11 WorkCellSimulator Software suite for cell simulation Component Editor Workcell Editor Simulator Robot Code Compiler


12 Bin Picking Prelevare pezzi alla rinfusa da un cassone
13 Robotica Autonoma di Servizio


14 Percezione = Intelligenza I robot di servizio devono lavorare a stretto contatto con l uomo: si devono muovere ed esplorare l ambiente attorno a loro cambia in continuazione la percezione di cosa gli circonda è fondamentale perché compiano le azioni giuste. La percezione è ciò che li rende davvero intelligenti e autonomi.



15 Percezione 2D Le immagini bidimensionali possono ingannare

16 Percezione 3D E fondamentale che il robot percepisca il mondo in 3D Esistono vari sensori diversi che misurano le distanze in maniera veloce e precisa Alcuni di essi possono essere usati solo all interno




17 Obiettivo: ricostruzione densa sia ottica che 3D (RGB-D) di ambienti indoor e outdoor Strumenti: telecamera omnidirezionale laser range finder attuato da un unità pan-tilt robot mobile DVL-SLAM: Ricostruzione RGB-Depth
18 Obiettivo: ricostruzione densa sia ottica che 3D (RGB-D) di ambienti indoor e outdoor Strumenti: telecamera omnidirezionale laser range finder attuato da un unità pan-tilt robot mobile Algoritmi di SLAM per la simultanea ricostruzione di ambienti e localizzazione del robot all interno di essi DVL-SLAM: Ricostruzione RGB-Depth


19 Obiettivo: ricostruzione densa sia ottica che 3D (RGB-D) di ambienti indoor e outdoor Strumenti: telecamera omnidirezionale laser range finder attuato da un unità pan-tilt robot mobile Algoritmi di SLAM per la simultanea ricostruzione di ambienti e localizzazione del robot all interno di essi Utilizzo del cloud computing per estrarre immagini aggiuntive o compiere computazioni complesse. DVL-SLAM: Ricostruzione RGB-Depth



20 Progetto Tidy-up Robot Mira a migliorare l esplorazione visuale per la navigazione robotica e il riconoscimento di oggetti Introduce il concetto di sufficient exploration per decidere quando il robot ha visto abbastanza e quindi può smettere di cercare un oggetto Si vuole valutare questo sistema di esplorazione visuale per un applicazione di un robot che mette in ordine una stanza.


21 ROS: framework per la robotica Middleware per la robotica con alcune funzioni da sistema operativo Fornisce librerie e strumenti per creare più facilmente applicazioni robotiche Facilità soprattutto: l interfacciamento con più sensori (ha drivers per molti sensori) la visualizzazione e il debugging lo scambio di messaggi tra moduli diversi Contiene numerose librerie utilizzabili per la navigazione, il motion planning, il trattamento di immagini e di dati 3D E modulare, multi-linguaggio e open source.

22 ROS: applicazioni industriali Primo utilizzo industriale: Motoman Robotics Division per applicazione pick and place in ambiente non strutturato Si è integrato ROS nei sistemi di controllo industriali mantenuta affidabilità e sicurezza messe a disposizioni le funzionalità algoritmiche e di message passing di ROS Progetto rilasciato come pacchetto ROS open source (ROS industrial)


23 RGB-D People Tracking con Kinect Detection e Tracking di persone da robot mobile con dati RGB-D Unico sensore: Microsoft Kinect Utilizzo di ROS come framework Ipotesi: le persone si muovono su un piano


24 Rimozione del ground plane La stima del ground plane è fatta sui punti 3D ed è basata sul metodo RANSAC Rende più semplice la successiva fase di clustering 3D

25 Clustering 3D e People Detection Tecniche di clustering 3D appositamente pensate per separare anche persone molto vicine tra loro o vicine al background People detection basata su descrittore HOG [1] e classificazione SVM [1] N. Dalal and B. Triggs. Histogram of Oriented Gradients for Human Detection, CVPR 2005.




26 Data Association Per distinguere una persona dall altra si considerano moto e aspetto delle persone Per ogni persona viene istruito online un classificatore basato su feature di colore Essi imparano autonomamente come distinguere al meglio una persona dall altra e si migliorano col passare del tempo



27 Risultati Runtime (frame per secondo)
 Proposta di Tesina/Tesi Matteo Munaro,")


28 Tracking di persone all interno di una rete composta da telecamere Kinect (progetto di dipartimento «R3D video») Proposta di Tesina/Tesi Matteo Munaro, Stefano Ghidoni Tesina: Questa tesina ha come obiettivo l applicazione del sistema di tracking di persone sviluppato allo IAS-Lab ad una Kinect montata su una piattaforma mobile PT (Pan-Tilt). Tesi: la tesina può continuare come tesi estendendo il lavoro ad una rete di più Kinect che comunichino le informazioni di tracking per cooperare.


29 Proposta di Tesina/Tesi Matteo Munaro Fusione di tecniche di re-identificazione di persone per applicazioni di person following Tesina: Questa tesina mira a fondere insieme tecniche di re-identificazione di persone a lungo termine già studiate allo IAS-Lab per ottenere una classificazione più robusta di quella ottenibile con le singole tecniche prese singolarmente. Tesi: La tesina può continuare come tesi sviluppando ulteriormente la robustezza e l efficienza del sistema e testandolo in applicazioni real time in cui un robot debba riconoscere e seguire solo le persone autorizzate.



30 Proposta di Tesina/Tesi Matteo Munaro Applicazione di tecniche di re-identificazione a breve termine per il tracking di persone Tesina: Questa tesina mira ad utilizzare tecniche di re-identificazione di persone a breve termine per migliorare le performance del tracking di persone da sensori RGB-D realizzato allo IAS-Lab. Aspetti importanti saranno la robustezza alle occlusioni parziali e totali, ai cambiamenti di luminosità e di posa. Tesi: estensione in termini di robustezza, efficienza e test a bordo di robot mobile.



31 Proposta di Tesina/Tesi Matteo Munaro, Stefano Michieletto Riconoscimento di azioni da dati RGB-D per la robotica di servizio Tesi: Questa tesi ha come obiettivo lo studio e realizzazione di un sistema di riconoscimento di azioni umane da un robot di servizio. A tale scopo dovranno essere utilizzati sensori RGB-D, come Microsoft Kinect. Si chiede di estendere quanto già sviluppato allo IAS-Lab sfruttando il calcolo del moto 3D e lo skeletal tracking in modo che le azioni vengano segmentate in tempo reale e che l intero sistema funzioni anche quando il robot è in movimento. Tesina: solo la parte del funzionamento con robot in movimento.
32 Proposta di Tesina/Tesi Stefano Michieletto, Matteo Munaro Action recognition: improve data classification Tesi: Questa tesi ha come obiettivo lo studio e realizzazione di un sistema di riconoscimento di azioni umane da un robot di servizio. Si chiede di estendere quanto già sviluppato allo IAS-Lab sfruttando il calcolo del moto 3D e lo skeletal tracking, ma cambiando il sistema di classificazione delle azioni. In una prima fase verrà utilizzato un GMM (Gaussian Mixture Model) per poi tentare di affinare ulteriormente utilizzando un classificatore più sofisticato. Tesina: solo la parte del funzionamento con GMM.

33 Proposta di Tesina/Tesi Stefano Michieletto, Matteo Munaro Action recognition: motion+skeleton combination Tesi: Questa tesi ha come obiettivo lo studio e realizzazione di un sistema di riconoscimento di azioni umane da un robot di servizio. Si chiede di equazione estendere qui. quanto già sviluppato allo IAS-Lab sfruttando il calcolo del moto 3D e lo skeletal tracking, ma combinando i due descrittori per ottenere risultati più performanti. In una prima fase si andranno a filtrare le informazioni dello scheletro in base a quelle di movimento, per poi viceversa ottenere un informazione di moto 3D più dettagliata dai dati dello scheletro. Tesina: la parte di filtraggio delle informazioni dello scheletro.

34 Learning from Naïve Visual Demonstration Proposta di Tesina/Tesi Stefano Michieletto Tesi: Questa tesi ha come obiettivo lo studio e realizzazione di un sistema di Learning from Demonstration basato solo sull informazione visiva. Si chiede di estendere quanto già sviluppato allo IAS-Lab per migliorare le capacità del robot di imparare osservando le azioni svolte da chi lo circonda. Il modello attualmente utilizzato (Donut Mixture Model) dovrà essere esteso per tranne beneficio anche delle dimostrazioni corrette. Sviluppare poi un modello di regression che renda flessibile il sistema ad eventuali modifiche. Tesina: lo sviluppo della parte di regression.



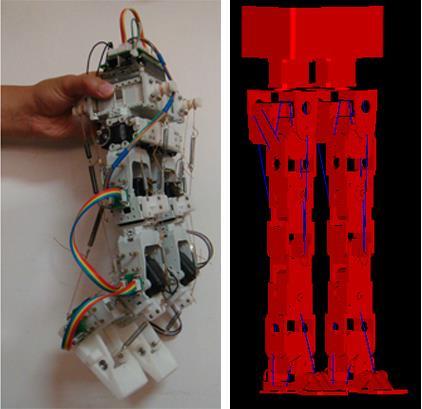
35 NAO Simulated Model: Improvements & Sensors Proposta di Tesina/Tesi Stefano Michieletto Tesi: Questa tesi ha come obiettivo lo sviluppo del modello URDF del robot umanoide NAO di Aldebaran. Si chiede di estendere quanto già sviluppato allo IAS-Lab, affinando i parametri fisici del modello partendo dai dati raccolti attraverso il robot reale. Per poter raggiungere tale obiettivo è necessario integrare nel modello esistente i diversi sensori che costituiscono il NAO, per poterli prendere come rifermento durante lo svolgimento del lavoro. Tesina: la parte integrazione dei sensori.

36 Proposta di Tesina/Tesi Stefano Michieletto COMAU drivers and industrial learning from demonstration Tesi: Questa tesi ha come obiettivo lo sviluppo di un driver compatibile con gli standard ROS industrial per il robot manipolatore COMAU Smart Six. In una prima fase il driver dovrà prevedere tutte le principali specifiche del protocollo. In una fase successiva, si integreranno delle funzionalità avanzate per rendere il modello più fruibile e completo. I parametri di precisione e flessibilità del sistema verranno testati attraverso algoritmi di Learning from Demonstration. Tesina: implementazione delle principali specifiche del protocollo.

37 Proposta di Tesina/Tesi Elisa Tosello Pianificazione del moto di robot dotati di molti gradi di libertà. Riutilizzo di hw e sw Ambiti: robotica industriale robotica di servizio


38 Object Recognition & Pose Estimation INTRODUCTION Goal 3D Object Recognition for Robotic Applications Real Time Online Learning Multimodal Sensory Perception & Action
39 Object Recognition & Pose Estimation RESEARCH THEME Visibility Space Modeling Learn appearance over rotations Tracking features over different object poses. Visual Word MoG Online Learning Probability Object models can be refined when new data is provided. Mixture of Gaussian Light and Fast Models are easy to share confidence increase over time View Point

40 Object Recognition & Pose Estimation RESEARCH THEME Key Issues MoG learning Points are in a Manifold. Online learning. Models Comparison Cross Correlation for MoG. Mode Finding algorithm for MoG. Data Acquisition Dataset with poses information. Structure from Motion for small objects. Model Registration MoG Cross Correlation

 MoG Mode Finding (Object and Gesture")
41 Possible Thesis GPU Computing GPU Computing ROS Framework Provide robots the access to high performance services. High Parallelization Migration of useful algorithms to CUDA. Particle Filtering (People Tracking) MoG Mode Finding (Object and Gesture Recognition) State of Art algorithms? (Ideas?)




42 SLAM with RGB-D data for a mobile robot Research Topic Overview Sensors Omnidirectional cameras Laser Range Finder RGB-D sensors (e.g. Kinect)



43 Research Topic Currently working on... Sensor fusion
44 Laser-based 3D SLAM and Reconstruction On a mobile platform Laser fixed or rotating Master Thesis Proposals Sensor Fusion from Natural Scenes No need to use artificial tool (e.g. checkerboards) to estimate the transformation between two or more sensors

45 Introduction Figure taken from
46 Bernstein s DOFs Problem The Motor Equivalence Problem in motor control states that there are multiple ways for humans or animals to perform a movement in order to achieve the same goal. The human body has redundant anatomical DOFs, redundant kinematic DOFs, and redundant neurophysiological DOFs. How the nervous system «chooses» a subset of these near-infinite DOFs is an overarching difficulty in understanding motor control and motor learning.
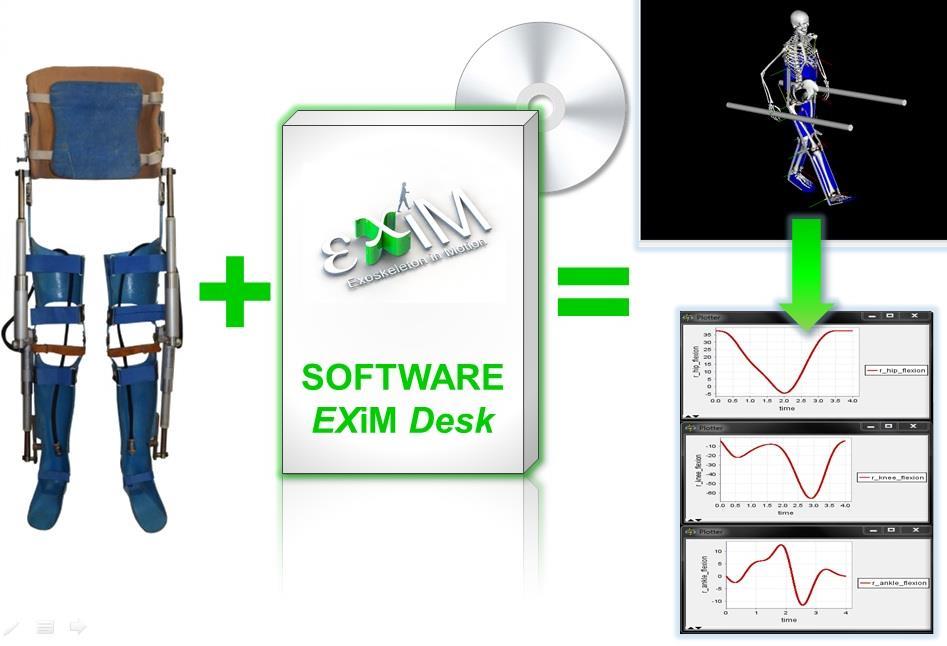
47 Synthesizing the low-level robot motion control from high-level commands Real-time simulation and control of robotic systems, such as humanoid robots, exoskeletons and generally human-compatible robotic structures Movement Primitives Real-time interpretation of movements, comparison to ideal motions, and prediction of movement patterns Neuromusculoskeletal Modeling and Simulation Neurorehabilitation Technologies Research Interests
48 Other Research Interests/Projects

49 Business Perspectives 1

50 Business Perspectives 2
51 Business Perspectives 3



52 Brain-Machine Interfaces









53 BMI loop Motor Imagery Evoked potentials
54 Brain-Machine Interface Interdisciplinary field BMI driven applications Control Mobile devices Orthoses Exoskeleton Rehabilitation Motor rehabilitation Cognitive rehabilitation References: Wolpaw, J. R. (2002). Brain-computer interfaces for communication and control. Clinical Neurophysiology, 113(6), McFarland, D. J., & Wolpaw, J. R. (2008). Brain-Computer interface operation of robotic and prosthetic devices. Computer, 41(10), Daly, J. J., & Wolpaw, J. R. (2008). Brain-computer interfaces in neurological rehabilitation. Lancet neurology, 7(11),
55 Mauro Antonello Filippo Basso Roberto Bortoletto Francesco Ferrati Stefano Ghidoni Riccardo Levorato Stefano Michieletto Emanuele Menegatti Matteo Munaro Luca Tonin Elisa Tosello
Ing. Matteo Munaro. Lab. di Sistemi Autonomi Intelligenti (IAS-Lab) Università di Padova 16/04/12 - Bologna
 Università di Padova 16/04/12 - Bologna") Ing. Matteo Munaro Lab. di Sistemi Autonomi Intelligenti (IAS-Lab) Università di Padova 16/04/12 - Bologna Persone allo IAS-Lab Staff Enrico Pagello, Full Professor of Computer Science Emanuele Menegatti,
Ing. Matteo Munaro Lab. di Sistemi Autonomi Intelligenti (IAS-Lab) Università di Padova 16/04/12 - Bologna Persone allo IAS-Lab Staff Enrico Pagello, Full Professor of Computer Science Emanuele Menegatti,
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti
 Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti
 Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti
 Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti
 Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Proposte di Tesine/Tesi Laboratorio di Sistemi Autonomi Intelligenti IAS-Lab Dipartimento di Ingegneria dell Informazione Università di Padova IAS-Lab Matteo Munaro Algoritmo di tracking scalabile per
Sistemi Avanzati per il Riconoscimento (4S02792)
") Università di Verona Dipartimento di Informatica Corso di Laurea magistrale in Ingegneria e Scienze Informatiche Sistemi Avanzati per il Riconoscimento (4S02792) Prof. Marco Cristani e-mail: marco.cristani@univr.it
Università di Verona Dipartimento di Informatica Corso di Laurea magistrale in Ingegneria e Scienze Informatiche Sistemi Avanzati per il Riconoscimento (4S02792) Prof. Marco Cristani e-mail: marco.cristani@univr.it
Evento organizzato da. i Basilio Bona
 Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Comunicazione non verbale: computazione affettiva
 Comunicazione non verbale: computazione affettiva Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it
Comunicazione non verbale: computazione affettiva Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it
OpenDIAG Programma. Per informazioni contattare
 OpenDIAG 2014 Programma http://open.diag.uniroma1.it/ Per informazioni contattare Dott.ssa Giuditta Filomena filomena@dis.uniroma1.it telefono: 0677274175 Dott.ssa Gabriella Caramagno caramagno@dis.uniroma1.it
OpenDIAG 2014 Programma http://open.diag.uniroma1.it/ Per informazioni contattare Dott.ssa Giuditta Filomena filomena@dis.uniroma1.it telefono: 0677274175 Dott.ssa Gabriella Caramagno caramagno@dis.uniroma1.it
Il robot come strumento di apprendimento L'esperienza dell'università degli Studi di Padova. prof. Emanuele Menegatti e prof. Michele Moro IAS-Lab
 Il robot come strumento di apprendimento L'esperienza dell'università degli Studi di Padova prof. Emanuele Menegatti e prof. Michele Moro IAS-Lab nrico Pagello, Full Professor of Computer cience manuele
Il robot come strumento di apprendimento L'esperienza dell'università degli Studi di Padova prof. Emanuele Menegatti e prof. Michele Moro IAS-Lab nrico Pagello, Full Professor of Computer cience manuele
LOCATION SEMESTER LANGUAGE
 CR: Crema, via Bramante 65 MI: Milano, via Celoria 18 Teleconfrence: course available both in Milan and Crema through a teleconference system LT Sicurezza dei Sistemi e delle Reti Informatiche ONLINE F1A
CR: Crema, via Bramante 65 MI: Milano, via Celoria 18 Teleconfrence: course available both in Milan and Crema through a teleconference system LT Sicurezza dei Sistemi e delle Reti Informatiche ONLINE F1A
Testi del Syllabus. Docente BROGGI ALBERTO Matricola: Insegnamento: VISIONE ARTIFICIALE. Anno regolamento: 2012 CFU:
 Testi del Syllabus Docente BROGGI ALBERTO Matricola: 004802 Anno offerta: 2013/2014 Insegnamento: 12744 VISIONE ARTIFICIALE Corso di studio: 5015 INGEGNERIA INFORMATICA Anno regolamento: 2012 CFU: 9 Settore:
Testi del Syllabus Docente BROGGI ALBERTO Matricola: 004802 Anno offerta: 2013/2014 Insegnamento: 12744 VISIONE ARTIFICIALE Corso di studio: 5015 INGEGNERIA INFORMATICA Anno regolamento: 2012 CFU: 9 Settore:
Monocular SLAM. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Monocular SLAM Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Structure from motion (SFM) Unknown camera viewpoints?? 2 Calcolo delle corrispondenze Coppia coniugata: è costituita
Monocular SLAM Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Structure from motion (SFM) Unknown camera viewpoints?? 2 Calcolo delle corrispondenze Coppia coniugata: è costituita
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Ingegneria dei sistemi di Controllo
 Dalmine, 22-02-2017 Dipartimento di Ingegneria Ingegneria dei sistemi di Controllo Università degli Studi di Bergamo Dipartimento di Ingegneria dell Informazione Ermidoro Michele About myself 25-10-1987
Dalmine, 22-02-2017 Dipartimento di Ingegneria Ingegneria dei sistemi di Controllo Università degli Studi di Bergamo Dipartimento di Ingegneria dell Informazione Ermidoro Michele About myself 25-10-1987
Open source e Robots. Bari, Linux Day Marcello Barile
 Open source e Robots Bari, Linux Day 2016 - Marcello Barile Quali sono i motivi? Introduzione Open source in ambito accademico e di ricerca Quali sono i motivi? Costi di licenza Libertà di consultazione
Open source e Robots Bari, Linux Day 2016 - Marcello Barile Quali sono i motivi? Introduzione Open source in ambito accademico e di ricerca Quali sono i motivi? Costi di licenza Libertà di consultazione
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura
 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
ALLEGATO A (D.R. n. 832 del ) AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE
 AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE") ALLEGATO A (D.R. n. 832 del 14.10.2013) AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE PROGRAMMA DI RICERCA N. 1 Affissione dei criteri per la valutazione dei titoli e del colloquio:
ALLEGATO A (D.R. n. 832 del 14.10.2013) AREA SCIENTIFICO DISCIPLINARE INGEGNERIA INDUSTRIALE E DELL INFORMAZIONE PROGRAMMA DI RICERCA N. 1 Affissione dei criteri per la valutazione dei titoli e del colloquio:
Sistema DANTE. Scheda prodotto SISTEMA DANTE
 PAG. 1 DI 11 SISTEMA DANTE Sistema professionale per l annotazione di eventi che consente raccolta, analisi, presentazione e gestione di dati osservati in tempo reale o su registrazione video. PAG. 2 DI
PAG. 1 DI 11 SISTEMA DANTE Sistema professionale per l annotazione di eventi che consente raccolta, analisi, presentazione e gestione di dati osservati in tempo reale o su registrazione video. PAG. 2 DI
Settore Guida 14. Roma, 24 marzo 2011
 Settore Guida 14 CV (CP) Piero PELLIZZARI Comando Generale delle Capitanerie di Porto-Guardia Costiera Sicurezza della Navigazione e del Trasporto Marittimo Trend Tecnologici Roma, 24 marzo 2011 Mission
Settore Guida 14 CV (CP) Piero PELLIZZARI Comando Generale delle Capitanerie di Porto-Guardia Costiera Sicurezza della Navigazione e del Trasporto Marittimo Trend Tecnologici Roma, 24 marzo 2011 Mission
Ingegneria e Scienze Informatiche
 Università degli Studi di Bologna Corso di Studio Magistrale in Ingegneria e Scienze Informatiche Cesena v.1.0-20140514 Le due anime dell Informatica Scienze dell Informazione Ingegneria Informatica Le
Università degli Studi di Bologna Corso di Studio Magistrale in Ingegneria e Scienze Informatiche Cesena v.1.0-20140514 Le due anime dell Informatica Scienze dell Informazione Ingegneria Informatica Le
Applicazioni della Realtà Virtuale al settore della Riabilitazione Motoria. Stato dell arte e caso di studio: il progetto HYPER Alessandro De Mauro
 Applicazioni della Realtà Virtuale al settore della Riabilitazione Motoria. Stato dell arte e caso di studio: il progetto HYPER Alessandro De Mauro Ademauro@vicomtech.org Vicomtech Centro tecnologico no
Applicazioni della Realtà Virtuale al settore della Riabilitazione Motoria. Stato dell arte e caso di studio: il progetto HYPER Alessandro De Mauro Ademauro@vicomtech.org Vicomtech Centro tecnologico no
Informazioni e Programma
 Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Laboratorio di Intelligenza Artificiale
 Laboratorio di Intelligenza Artificiale Department of Computer, Control, and Management Engineering "Antonio Ruberti " Marco Imperoli PROGETTI FINALI May, 2017 NAVIGATION TASK GOAL: Data una lista di posizioni
Laboratorio di Intelligenza Artificiale Department of Computer, Control, and Management Engineering "Antonio Ruberti " Marco Imperoli PROGETTI FINALI May, 2017 NAVIGATION TASK GOAL: Data una lista di posizioni
The picture can't be displayed. DRONI & INTELLIGENZA ARTIFICIALE
 The picture can't be displayed. DRONI & INTELLIGENZA ARTIFICIALE VISUAL WORKING / HELVETIS CEO PAOLO BRIANZONI Bormio, Italia 2012 Fonda Visual Working 2013 Entra nel mondo dei droni 2014 Pioneri ispezioni
The picture can't be displayed. DRONI & INTELLIGENZA ARTIFICIALE VISUAL WORKING / HELVETIS CEO PAOLO BRIANZONI Bormio, Italia 2012 Fonda Visual Working 2013 Entra nel mondo dei droni 2014 Pioneri ispezioni
Android Development. Course Projects. Università degli Studi di Parma
 Android Development Course Projects This work is licensed under a Creative Commons Attribution NonCommercialShareAlike 4.0 International License. Marco Picone, Ph.D. marco.picone@unipr.it Mobile Application
Android Development Course Projects This work is licensed under a Creative Commons Attribution NonCommercialShareAlike 4.0 International License. Marco Picone, Ph.D. marco.picone@unipr.it Mobile Application
Le realtà produttive in Italia nell era dell Industria 4.0 Introduzione
 ARSControl Automation, Robotics and System Control lab Le realtà produttive in Italia nell era dell Industria 4.0 Introduzione Cesare Fantuzzi ARSControl Lab, University of Modena and Reggio Emilia, Italy
ARSControl Automation, Robotics and System Control lab Le realtà produttive in Italia nell era dell Industria 4.0 Introduzione Cesare Fantuzzi ARSControl Lab, University of Modena and Reggio Emilia, Italy
Macchinari Intelligenti in Plant Connessi. Enrico Calleri, Eurotech Michele Stecca, Horsa
 Macchinari Intelligenti in Plant Connessi Enrico Calleri, Eurotech Michele Stecca, Horsa Ecosystem Eurotech & Horsa 11/ 10/ 2018 Unique Value Proposition PRODUCTS Proven, Certified Building Blocks Modular
Macchinari Intelligenti in Plant Connessi Enrico Calleri, Eurotech Michele Stecca, Horsa Ecosystem Eurotech & Horsa 11/ 10/ 2018 Unique Value Proposition PRODUCTS Proven, Certified Building Blocks Modular
Testi del Syllabus. Docente LODI RIZZINI DARIO Matricola: Insegnamento: ROBOTICA. Anno regolamento: 2013 CFU:
 Testi del Syllabus Docente LODI RIZZINI DARIO Matricola: 206099 Anno offerta: 2013/2014 Insegnamento: 07233 - ROBOTICA Corso di studio: 5015 - INGEGNERIA INFORMATICA Anno regolamento: 2013 CFU: 6 Settore:
Testi del Syllabus Docente LODI RIZZINI DARIO Matricola: 206099 Anno offerta: 2013/2014 Insegnamento: 07233 - ROBOTICA Corso di studio: 5015 - INGEGNERIA INFORMATICA Anno regolamento: 2013 CFU: 6 Settore:
19 touchscreen display
 PH8200smart PH Smart is a new generation of integrated-automation PH presses, now with an even more powerful digital set-up and monitoring system, providing immediate control and further productivity advantages.
PH8200smart PH Smart is a new generation of integrated-automation PH presses, now with an even more powerful digital set-up and monitoring system, providing immediate control and further productivity advantages.
VISIONE 3D: UNA TECNOLOGIA MATURA CHE APRE NUOVE POSSIBILITA IN FONDERIA
 3D CPS 2.0 THE NEW SOLUTION VISIONE 3D: UNA TECNOLOGIA MATURA CHE APRE NUOVE POSSIBILITA IN FONDERIA Ingegner Alessandro Caprioli, PhD PRESENTAZIONI: CHI E ISS ISS, INNOVATIVE SECURITY SOLUTIONS SRL E
3D CPS 2.0 THE NEW SOLUTION VISIONE 3D: UNA TECNOLOGIA MATURA CHE APRE NUOVE POSSIBILITA IN FONDERIA Ingegner Alessandro Caprioli, PhD PRESENTAZIONI: CHI E ISS ISS, INNOVATIVE SECURITY SOLUTIONS SRL E
«Fiera delle idee» PO FESR SICILIA Catania, 31 gennaio 2017, Dipartimento di Fisica e Astronomia, Università degli Studi di Catania
 «Fiera delle idee» PO FESR SICILIA 2014-2020 Catania, 31 gennaio 2017, Dipartimento di Fisica e Astronomia, Università degli Studi di Catania Presenter: Dr. Giulia Russo, giulia.russo@unict.it - University
«Fiera delle idee» PO FESR SICILIA 2014-2020 Catania, 31 gennaio 2017, Dipartimento di Fisica e Astronomia, Università degli Studi di Catania Presenter: Dr. Giulia Russo, giulia.russo@unict.it - University
INTRODUZIONE AD OMNET++
 INTRODUZIONE AD OMNET++ Omnet++ OMNET++ è una piattaforma di simulazione : È utile per: Modulare: gerarchia di moduli Ad eventi Orientata agli Oggetti (in C++) Open Source Versione comm. OMNEST analizzare
INTRODUZIONE AD OMNET++ Omnet++ OMNET++ è una piattaforma di simulazione : È utile per: Modulare: gerarchia di moduli Ad eventi Orientata agli Oggetti (in C++) Open Source Versione comm. OMNEST analizzare
Robotics Research Group Politecnico di Torino. Centro Congressi Unione Industriale Torino 19/10/2011 1
 MACP4Log Una squadra cooperante di robot mobili in spazi logistici: problemi e soluzioni Marina Indri Robotics Research Group Politecnico di Torino 1 Obiettivi e funzionalità della squadra di robot Per
MACP4Log Una squadra cooperante di robot mobili in spazi logistici: problemi e soluzioni Marina Indri Robotics Research Group Politecnico di Torino 1 Obiettivi e funzionalità della squadra di robot Per
Intelligenza delle persone, Intelligenza delle macchine, Sistemi ERP
 Intelligenza delle persone, Intelligenza delle macchine, Sistemi ERP ANTONIO GRIECO ASSOCIATE PARTNER NEXTEA Professore Associato Tecnologie e Sistemi di Lavorazione Università del Salento La consapevolezza
Intelligenza delle persone, Intelligenza delle macchine, Sistemi ERP ANTONIO GRIECO ASSOCIATE PARTNER NEXTEA Professore Associato Tecnologie e Sistemi di Lavorazione Università del Salento La consapevolezza
AGENDA WEBINAR FONDAZIONE CRUI E IBM
 AGENDA WEBINAR FONDAZIONE CRUI E IBM Data Titolo webinar Destinatari Mercoledì, 5 aprile 2017 New Venerdì, 21 aprile 2017 New Venerdì, 28 aprile 2017 New giovedì, 4 maggio 2017 New Venerdì, 12 maggio 2017
AGENDA WEBINAR FONDAZIONE CRUI E IBM Data Titolo webinar Destinatari Mercoledì, 5 aprile 2017 New Venerdì, 21 aprile 2017 New Venerdì, 28 aprile 2017 New giovedì, 4 maggio 2017 New Venerdì, 12 maggio 2017
IoT & IoE. Fabrizio Bozzarelli Strategic Sales, IoT
 IoT & IoE I principali motori di sviluppo dell Industry 4.0 rappresentano i business driver che consentiranno al Made in Italy di mantenere l eccellenza acquisita anche nell attuale panorama economico
IoT & IoE I principali motori di sviluppo dell Industry 4.0 rappresentano i business driver che consentiranno al Made in Italy di mantenere l eccellenza acquisita anche nell attuale panorama economico
Corso di Laurea Magistrale in Ingegneria Informatica
 Corso di Laurea Magistrale in Ingegneria Informatica Siti web: corsidilaurea.uniroma1.it/it/corso/2017/ingegneria-informatica/ e cclii.dis.uniroma1.it Ingegneria Informatica L'ingegneria informatica è
Corso di Laurea Magistrale in Ingegneria Informatica Siti web: corsidilaurea.uniroma1.it/it/corso/2017/ingegneria-informatica/ e cclii.dis.uniroma1.it Ingegneria Informatica L'ingegneria informatica è
Human e Artificial Intelligence per IoT: case studies di Smart grids
 GRUPPO TELECOM ITALIA Internet of things: new business models Peschiera Borromeo, Maggio 2016 Human e Artificial Intelligence per IoT: case studies di Smart grids TIM SWARM Joint Open Lab Sommario 4 IoT:
GRUPPO TELECOM ITALIA Internet of things: new business models Peschiera Borromeo, Maggio 2016 Human e Artificial Intelligence per IoT: case studies di Smart grids TIM SWARM Joint Open Lab Sommario 4 IoT:
Direttore : Professor Ugo Biader Ceipidor
 Direttore : Professor Ugo Biader Ceipidor Direttore Scientifico RfidLab: Professor Gianni Orlandi Coordinatore scientifico: Professor Carlo Maria Medaglia Fondatori dell RFID Lab Direttore Scientifico:
Direttore : Professor Ugo Biader Ceipidor Direttore Scientifico RfidLab: Professor Gianni Orlandi Coordinatore scientifico: Professor Carlo Maria Medaglia Fondatori dell RFID Lab Direttore Scientifico:
New technologies for novel experiences In Cultural Heritage
 New technologies for novel experiences In Cultural Heritage Prof. Alberto del Bimbo Dip. Ingegneria dell Informazione Università degli Studi di Firenze Progress of human communication ~2330 generations
New technologies for novel experiences In Cultural Heritage Prof. Alberto del Bimbo Dip. Ingegneria dell Informazione Università degli Studi di Firenze Progress of human communication ~2330 generations
La robotica terrestre
 Applicazioni e tecnologie dei sistemi robotici intelligenti - 23 settembre 2004 La robotica terrestre Sergio Taraglio FUS-ROB ENEA - C.R. Casaccia 1 Sommario Cos è un robot Esempi di robot Cosa si trova
Applicazioni e tecnologie dei sistemi robotici intelligenti - 23 settembre 2004 La robotica terrestre Sergio Taraglio FUS-ROB ENEA - C.R. Casaccia 1 Sommario Cos è un robot Esempi di robot Cosa si trova
Sperimentazione tecnologie big data per elaborazione e analisi dei testi (Big Data Text Analytics)
") Scheda Sperimentazione tecnologie big data per elaborazione e analisi dei testi (Big Data Text Analytics) Direzione Piattaforme Trasversali, integrazione e Big Data Contesto Le fonti dei contenuti testuali
Scheda Sperimentazione tecnologie big data per elaborazione e analisi dei testi (Big Data Text Analytics) Direzione Piattaforme Trasversali, integrazione e Big Data Contesto Le fonti dei contenuti testuali
ATTIVITÀ FORMATIVE S.S.D. ORE DIDATTICO CFU
 PIANI DI STUDIO INGEGNERIA ELETTRONICA PERIODO ATTIVITÀ FORMATIVE S.S.D. ORE DIDATTICO CFU 1 anno Digital Systems Electronics (*) (Elettronica dei sistemi digitali) ING-INF/01 60 1 6 Sistemi elettronici
PIANI DI STUDIO INGEGNERIA ELETTRONICA PERIODO ATTIVITÀ FORMATIVE S.S.D. ORE DIDATTICO CFU 1 anno Digital Systems Electronics (*) (Elettronica dei sistemi digitali) ING-INF/01 60 1 6 Sistemi elettronici
M. De Cecco
 Sistemi Meccatronici per AUSILIA Sensoristica ed automazione M. Zanetti, P. Tomasin, A. Fornaser, M. Da Lio, M. De Cecco DII MIRo Lab M. Zanetti, L. Faes, F. Tessarollo, G. Nollo DII BIOtech www.ausilia.tn.it
Sistemi Meccatronici per AUSILIA Sensoristica ed automazione M. Zanetti, P. Tomasin, A. Fornaser, M. Da Lio, M. De Cecco DII MIRo Lab M. Zanetti, L. Faes, F. Tessarollo, G. Nollo DII BIOtech www.ausilia.tn.it
Presentazione dell Orientamento Robotica e Automazione
 Università di Roma La Sapienza Facoltà di Ingegneria dell'informazione, Informatica e Statistica Laurea Magistrale in Ingegneria Elettronica Presentazione dell Orientamento Robotica e Automazione 6 giugno
Università di Roma La Sapienza Facoltà di Ingegneria dell'informazione, Informatica e Statistica Laurea Magistrale in Ingegneria Elettronica Presentazione dell Orientamento Robotica e Automazione 6 giugno
Sistema Industriale di Visione basato sull Intelligenza Artificiale
 Programmiamo innovazione e trasformiamo le idee in realtà. Sistema Industriale di Visione basato sull Intelligenza Artificiale AGS Advanced Global Solution Via Figino 20-20016 Pero - Italy info@ags-it.com
Programmiamo innovazione e trasformiamo le idee in realtà. Sistema Industriale di Visione basato sull Intelligenza Artificiale AGS Advanced Global Solution Via Figino 20-20016 Pero - Italy info@ags-it.com
- l apprendimento e la comprensione di tali segnali percepiti in un contesto.
 MANIFESTO Percorso Formativo Perceptual computing Docente di riferimento: Prof. Giuseppe Boccignone Sede di erogazione Milano http://boccignone.di.unimi.it/perceptualcomputing.html Obiettivi generali:
MANIFESTO Percorso Formativo Perceptual computing Docente di riferimento: Prof. Giuseppe Boccignone Sede di erogazione Milano http://boccignone.di.unimi.it/perceptualcomputing.html Obiettivi generali:
Programmazione europea Case history: l esperienza di 5T S.r.l.
 Programmazione europea 2014-2020 Case history: l esperienza di 5T S.r.l. Fabrizio Arneodo Chief Technology Officier Torino, 3 luglio 2014 Sommario La società 5T Il contesto Progetti EU realizzati Nuove
Programmazione europea 2014-2020 Case history: l esperienza di 5T S.r.l. Fabrizio Arneodo Chief Technology Officier Torino, 3 luglio 2014 Sommario La società 5T Il contesto Progetti EU realizzati Nuove
Performance Management
 Performance Management C è sempre una via per farlo in modo migliore. Trovala. Thomas Edison Recenti ricerche hanno dimostrato che i sistemi di Performance Management tradizionali sono sempre meno efficaci
Performance Management C è sempre una via per farlo in modo migliore. Trovala. Thomas Edison Recenti ricerche hanno dimostrato che i sistemi di Performance Management tradizionali sono sempre meno efficaci
Next Generation Internet nel workprogramme
 Next Generation Internet nel workprogramme 2018-2020 Prof.ssa Chiara Petrioli Direttore SENSES Lab Direttore Cyber Physical Systems Lab Coordinatore Dottorato in Informatica Next Generation Internet: La
Next Generation Internet nel workprogramme 2018-2020 Prof.ssa Chiara Petrioli Direttore SENSES Lab Direttore Cyber Physical Systems Lab Coordinatore Dottorato in Informatica Next Generation Internet: La
Circuiti e algoritmi per l elaborazione dell informazione
 Università di Roma La Sapienza Facoltà di Ingegneria Laurea Specialistica in Ingegneria Elettronica Orientamento: Circuiti e algoritmi per l elaborazione dell informazione L x[n] y[n] Circuito: V g (t)
Università di Roma La Sapienza Facoltà di Ingegneria Laurea Specialistica in Ingegneria Elettronica Orientamento: Circuiti e algoritmi per l elaborazione dell informazione L x[n] y[n] Circuito: V g (t)
Ing. Cristian Secchi Tel
 TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
Il rapporto sui consumatori vulnerabili e la povertà energetica in Europa
 Il rapporto sui consumatori vulnerabili e la povertà energetica in Europa Modello innovativo per contrastare la povertà energetica con un approccio integrato Migliorare la qualità della vità dei consumatori
Il rapporto sui consumatori vulnerabili e la povertà energetica in Europa Modello innovativo per contrastare la povertà energetica con un approccio integrato Migliorare la qualità della vità dei consumatori
Funzionalità. Ambiente di sviluppo integrato
 La piattaforma IoT Keplero Caratteristiche Funzionalità Middleware General-purpose monitoring system basato su eventi (Event Driven Information System) Consente l'acquisizione e l elaborazione in tempo
La piattaforma IoT Keplero Caratteristiche Funzionalità Middleware General-purpose monitoring system basato su eventi (Event Driven Information System) Consente l'acquisizione e l elaborazione in tempo
«MUSP»: Piacenza, 6 Marzo 2012
 Nuovi Modelli di Business L esperienza Comau del «Leasing Operativo» «MUSP»: Piacenza, 6 Marzo 2012 Property of Comau S.p.A. - Duplication prohibited Comau BODY WELDING & ASSEMBLY COMAU IS A GLOBAL AND
Nuovi Modelli di Business L esperienza Comau del «Leasing Operativo» «MUSP»: Piacenza, 6 Marzo 2012 Property of Comau S.p.A. - Duplication prohibited Comau BODY WELDING & ASSEMBLY COMAU IS A GLOBAL AND
Corso di Laurea in Informatica a.a
 Corso di Laurea in Informatica anno di corso codice denominazione cfu 1 E3101Q106 PROGRAMMAZIONE 2 turno A-L PROGRAMMAZIONE 2 turno M-Z settore scientifico disciplinare tipo semestre 8 INF/01 obbligatorio
Corso di Laurea in Informatica anno di corso codice denominazione cfu 1 E3101Q106 PROGRAMMAZIONE 2 turno A-L PROGRAMMAZIONE 2 turno M-Z settore scientifico disciplinare tipo semestre 8 INF/01 obbligatorio
Purple è una società specializzata nel campo dei sistemi di visione artificiale 3D, 2D e nello sviluppo di Software per l automazione industriale.
 VISION INNOVATION Purple è una società specializzata nel campo dei sistemi di visione artificiale 3D, 2D e nello sviluppo di Software per l automazione industriale. Le nostre soluzioni permettono di incrementare
VISION INNOVATION Purple è una società specializzata nel campo dei sistemi di visione artificiale 3D, 2D e nello sviluppo di Software per l automazione industriale. Le nostre soluzioni permettono di incrementare
Agenda BlackBerry Enterprise Update Diego Ghidini L evoluzione dei modelli di lavoro: Scenari e Opportunità per le Aziende
 12 MARZO - ROMA Agenda 10.15 BlackBerry Enterprise Update Diego Ghidini 10.30 L evoluzione dei modelli di lavoro: Scenari e Opportunità per le Aziende Alessandro Piva 11.15 Dall Enterprise Mobility al
12 MARZO - ROMA Agenda 10.15 BlackBerry Enterprise Update Diego Ghidini 10.30 L evoluzione dei modelli di lavoro: Scenari e Opportunità per le Aziende Alessandro Piva 11.15 Dall Enterprise Mobility al
MSDA-2 - MOC PERFORM CLOUD DATA SCIENCE WITH AZURE MACHINE LEARNING
 MSDA-2 - MOC 20774 - PERFORM CLOUD DATA SCIENCE WITH AZURE MACHINE LEARNING Categoria: Data and Analytics INFORMAZIONI SUL CORSO Durata: Categoria: Qualifica Istruttore: Dedicato a: Produttore: 5 Giorni
MSDA-2 - MOC 20774 - PERFORM CLOUD DATA SCIENCE WITH AZURE MACHINE LEARNING Categoria: Data and Analytics INFORMAZIONI SUL CORSO Durata: Categoria: Qualifica Istruttore: Dedicato a: Produttore: 5 Giorni
Esperienze nel settore Automotive
 Esperienze nel settore Automotive Tekna Automazione e Controllo lavora nel campo dell automazione industrial fornendo prodotti, Sistemi e servizi per l automazione ed il controllo delle line di produzione.
Esperienze nel settore Automotive Tekna Automazione e Controllo lavora nel campo dell automazione industrial fornendo prodotti, Sistemi e servizi per l automazione ed il controllo delle line di produzione.
Competenze e proposte UNIUD Traiettoria S3: Filiera sistema casa
 Progetto HEaD: assegni di ricerca in azienda Competenze e proposte UNIUD Traiettoria S3: Filiera sistema casa Prof. Stefano Mizzaro Dipartimento di Scienze Matematiche, Informatiche e Fisiche Udine 13/01/2017
Progetto HEaD: assegni di ricerca in azienda Competenze e proposte UNIUD Traiettoria S3: Filiera sistema casa Prof. Stefano Mizzaro Dipartimento di Scienze Matematiche, Informatiche e Fisiche Udine 13/01/2017
LA DIGITALIZZAZIONE PER HEALTHCARE 4.0
 LA DIGITALIZZAZIONE PER HEALTHCARE 4.0 Giulio Iannello Preside della Facoltà Dipartiumentale di Ingegneria Università Campus Bio-Medico di Roma Sala Conferenze PRABB Roma, 3 luglio 2018 UCBM: Piano Strategico
LA DIGITALIZZAZIONE PER HEALTHCARE 4.0 Giulio Iannello Preside della Facoltà Dipartiumentale di Ingegneria Università Campus Bio-Medico di Roma Sala Conferenze PRABB Roma, 3 luglio 2018 UCBM: Piano Strategico
Video Analysis (cenni) Annalisa Franco
 Annalisa Franco") 1 Video Analysis (cenni) Annalisa Franco annalisa.franco@unibo.it http://bias.csr.unibo.it/vr/ 2 Visual motion Un video è una sequenza di frame catturati nel corso del tempo Il valori dell immagine sono
1 Video Analysis (cenni) Annalisa Franco annalisa.franco@unibo.it http://bias.csr.unibo.it/vr/ 2 Visual motion Un video è una sequenza di frame catturati nel corso del tempo Il valori dell immagine sono
Advanced Geomatics solutions: from Academy to Industry
 Advanced Geomatics solutions: from Academy to Industry Kuaternion Let s measure your World Start Up di www.kuaternion.com CHI SIAMO Costituita nel Dicembre del 2014 come Start Up del Dipartimento di Ingegneria
Advanced Geomatics solutions: from Academy to Industry Kuaternion Let s measure your World Start Up di www.kuaternion.com CHI SIAMO Costituita nel Dicembre del 2014 come Start Up del Dipartimento di Ingegneria
La mia esperienza in SPS Italia DAI SENSORI INTELLIGENTI ALLA SMART FACTORY
 La mia esperienza in SPS Italia DAI SENSORI INTELLIGENTI ALLA SMART FACTORY Anastasia Impicciatore Università degli Studi dell Aquila 15 giugno 2018 Tre filoni di innovazione: Automazione industriale,
La mia esperienza in SPS Italia DAI SENSORI INTELLIGENTI ALLA SMART FACTORY Anastasia Impicciatore Università degli Studi dell Aquila 15 giugno 2018 Tre filoni di innovazione: Automazione industriale,
Analisi e comparazione dei Framework OpenSwing e Google Web Toolkit per lo sviluppo di interfacce utente con paradigma MVC.
 tesi di laurea Analisi e comparazione dei Framework OpenSwing e Google Web Toolkit. Anno Accademico 2009/2010 relatore Ch.mo prof. Porfirio Tramontana correlatore Ing. Luca Anniciello candidato Gianluca
tesi di laurea Analisi e comparazione dei Framework OpenSwing e Google Web Toolkit. Anno Accademico 2009/2010 relatore Ch.mo prof. Porfirio Tramontana correlatore Ing. Luca Anniciello candidato Gianluca
Ingegneria del Software
 Università di Bergamo Facoltà di Ingegneria INGEGNERIA DEL SOFTWARE Paolo Salvaneschi A1_3 V2.4 Ingegneria del Software Il corpus di conoscenze Il contenuto del documento è liberamente utilizzabile dagli
Università di Bergamo Facoltà di Ingegneria INGEGNERIA DEL SOFTWARE Paolo Salvaneschi A1_3 V2.4 Ingegneria del Software Il corpus di conoscenze Il contenuto del documento è liberamente utilizzabile dagli
Sensing, reasoning,, action:
 Sensing, reasoning,, action: una gestione innovativa dello spettro radio Mario Frullone Fondazione Ugo Bordoni Prospettive di ricerca nelle ICT: argomenti per i programmi nazionali ed europei Torino, 2-3
Sensing, reasoning,, action: una gestione innovativa dello spettro radio Mario Frullone Fondazione Ugo Bordoni Prospettive di ricerca nelle ICT: argomenti per i programmi nazionali ed europei Torino, 2-3
Light Industrial UAV System
 Light Industrial UAV System Reach the Unreachable High-performance industrial UAV within Short Term SAGA ti consente di avere capacità di sviluppo e produzione di massa superiore. Crea un tuo modello speciale,
Light Industrial UAV System Reach the Unreachable High-performance industrial UAV within Short Term SAGA ti consente di avere capacità di sviluppo e produzione di massa superiore. Crea un tuo modello speciale,
SOMHI. POR FESR Azione I.1b.1.2 Poli di Innovazione Agenda Strategica di Ricerca Amada Engineering Europe Marco Ricci CTO
 Incontro con Regione Piemonte 5 marzo 2018 POR FESR 2014-2020 - Azione I.1b.1.2 Poli di Innovazione Agenda Strategica di Ricerca 2016 SOMHI Amada Engineering Europe Marco Ricci CTO Executive Summary del
Incontro con Regione Piemonte 5 marzo 2018 POR FESR 2014-2020 - Azione I.1b.1.2 Poli di Innovazione Agenda Strategica di Ricerca 2016 SOMHI Amada Engineering Europe Marco Ricci CTO Executive Summary del
EM93: Pilates Therapy for physiotherapists: basic level
 April 14, 2018 EM93: Pilates Therapy for physiotherapists: basic level INTRO LEVEL COURSE: FREE BODY Practical experience and clinical evidence have amply demonstrated the effectiveness of the Pilates
April 14, 2018 EM93: Pilates Therapy for physiotherapists: basic level INTRO LEVEL COURSE: FREE BODY Practical experience and clinical evidence have amply demonstrated the effectiveness of the Pilates
SISTEMI OPERATIVI EMBEDDED. Sistemi Embedded
 SISTEMI OPERATIVI SISTEMI OPERATIVI EMBEDDED Sistemi Embedded» Termine utilizzato per indicare l uso di HW e SW all interno di un prodotto progettato per svolgere una funzione specifica il computer non
SISTEMI OPERATIVI SISTEMI OPERATIVI EMBEDDED Sistemi Embedded» Termine utilizzato per indicare l uso di HW e SW all interno di un prodotto progettato per svolgere una funzione specifica il computer non
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Mind s.r.l. cerca student interessati a sviluppare il seguente progetto di tesi di laurea/tirocinio
 Mind s.r.l., è start up innovativa, con sede legale e operativa a Modena costituita per sviluppare e realizzare un sistema di smart home proattivo e fortemente incentrato sull esperienza d utilizzo dell
Mind s.r.l., è start up innovativa, con sede legale e operativa a Modena costituita per sviluppare e realizzare un sistema di smart home proattivo e fortemente incentrato sull esperienza d utilizzo dell
INSEGNAMENTI/ ATTIVITÀ FORMATIVE CFU SEMESTRE S.S.D.
 P I A N I D I S T U D I O Sono previsti due diversi indirizzi di studio denominati Linguaggi e algoritmi (LA) e Progetto e sviluppo di sistemi software (PSS), ognuno articolato in due percorsi a scelta
P I A N I D I S T U D I O Sono previsti due diversi indirizzi di studio denominati Linguaggi e algoritmi (LA) e Progetto e sviluppo di sistemi software (PSS), ognuno articolato in due percorsi a scelta
Industry 4.0 preparati al futuro Strumenti operativi, tecnologie e servizi di supporto per le imprese
 Cluster Tecnologico Nazionale Fabbrica Intelligente Imprese, università, organismi di ricerca, associazioni e enti territoriali: insieme per la crescita del Manifatturiero Industry 4.0 preparati al futuro
Cluster Tecnologico Nazionale Fabbrica Intelligente Imprese, università, organismi di ricerca, associazioni e enti territoriali: insieme per la crescita del Manifatturiero Industry 4.0 preparati al futuro
EMANUELE BOLZONARO General Manager
 EMANUELE BOLZONARO General Manager Il partner dell industry 4.0 Siamo il miglior partner per l Industry 4.0 Perché siamo in grado di seguire ogni cliente a 360, dalla progettazione alla rendicontazione
EMANUELE BOLZONARO General Manager Il partner dell industry 4.0 Siamo il miglior partner per l Industry 4.0 Perché siamo in grado di seguire ogni cliente a 360, dalla progettazione alla rendicontazione
STUDIO E IMPLEMENTAZIONE DI UN SISTEMA DI PARCHEGGIO ASSISTITO
 UNIVERSITÀ DEL SALENTO FACOLTÀ DI INGEGNERIA Corso di Laurea Magistrale in Ingegneria Meccanica TESI DI LAUREA in MECCANICA DEL VEICOLO STUDIO E IMPLEMENTAZIONE DI UN SISTEMA DI PARCHEGGIO ASSISTITO Relatore:
UNIVERSITÀ DEL SALENTO FACOLTÀ DI INGEGNERIA Corso di Laurea Magistrale in Ingegneria Meccanica TESI DI LAUREA in MECCANICA DEL VEICOLO STUDIO E IMPLEMENTAZIONE DI UN SISTEMA DI PARCHEGGIO ASSISTITO Relatore:
Possibili Aree di Azione per le PMI Piemontesi. P. Mulassano - ISMB F. Dovis Politecnico di Torino A. Sciarappa - ISMB
 Possibili Aree di Azione per le PMI Piemontesi P. Mulassano - ISMB F. Dovis Politecnico di Torino A. Sciarappa - ISMB Bando Galileo di Torino Wireless Torino, 26 Settembre 2005 1 Le Componenti di Galileo
Possibili Aree di Azione per le PMI Piemontesi P. Mulassano - ISMB F. Dovis Politecnico di Torino A. Sciarappa - ISMB Bando Galileo di Torino Wireless Torino, 26 Settembre 2005 1 Le Componenti di Galileo
Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente
 Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente Torino, 12.12.2016 HuManS - Obiettivo generale progetto Il programma di ricerca è rivolto all'integrazione dei più recenti sistemi
Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente Torino, 12.12.2016 HuManS - Obiettivo generale progetto Il programma di ricerca è rivolto all'integrazione dei più recenti sistemi
CURIOSITAS ROBOTICA. Sommario
 CURIOSITAS ROBOTICA Giovanni Bianco 1, Riccardo Cassinis 2 Sommario L'articolo descrive lo stato della ricerca sul sistema di pianificazione multistrategica della navigazione di robot mobili autonomi presentato
CURIOSITAS ROBOTICA Giovanni Bianco 1, Riccardo Cassinis 2 Sommario L'articolo descrive lo stato della ricerca sul sistema di pianificazione multistrategica della navigazione di robot mobili autonomi presentato
MIR veicolo a guida autonoma laser guidata
 MIR veicolo a guida autonoma laser guidata Gentile Cliente, di seguito ci pregiamo presentarle un breve riassunto sul veicolo a guida autonoma MIR, relativi vantaggi e accessori, da noi offerti. I VANTAGGI
MIR veicolo a guida autonoma laser guidata Gentile Cliente, di seguito ci pregiamo presentarle un breve riassunto sul veicolo a guida autonoma MIR, relativi vantaggi e accessori, da noi offerti. I VANTAGGI
Biometric4Net. Stato del progetto e roadmap futura. Andrea Spadaccini Secondo Borsisti Day, Roma,
 Biometric4Net Stato del progetto e roadmap futura Sommario Motivazione ed obiettivi Stato del progetto Architettura del sistema Front-end Comunicazione client/server Back-end Sistemi biometrici utilizzati
Biometric4Net Stato del progetto e roadmap futura Sommario Motivazione ed obiettivi Stato del progetto Architettura del sistema Front-end Comunicazione client/server Back-end Sistemi biometrici utilizzati
ROBOTICS FOR CUSTOMERS
 ROBOTICS FOR CUSTOMERS Reply, nel contesto del Data-Driven Customer Engagement, ha definito il framework Robotics for Customers basato su due pilastri fondamentali: i Recommendation Systems e i Conversational
ROBOTICS FOR CUSTOMERS Reply, nel contesto del Data-Driven Customer Engagement, ha definito il framework Robotics for Customers basato su due pilastri fondamentali: i Recommendation Systems e i Conversational
Centralizzata Monolitica anni Reti Client Server anni Internet The network is the computer
 Distributed Object C o m p utin g "!$#&% ')(+*,#&-).0/2143657*98:.;8
Distributed Object C o m p utin g "!$#&% ')(+*,#&-).0/2143657*98:.;8
Strategia sistemica per una illuminazione pubblica intelligente
 Strategia sistemica per una illuminazione pubblica intelligente Mauro Annunziato ENEA Dir. Div. Smart Energy mauro.annunziato@enea.it Impatto ambientale ed inquinamento luminoso Efficienza Energetica Innovazione
Strategia sistemica per una illuminazione pubblica intelligente Mauro Annunziato ENEA Dir. Div. Smart Energy mauro.annunziato@enea.it Impatto ambientale ed inquinamento luminoso Efficienza Energetica Innovazione
INNOVATION COMPANY. Learn Quickly & Think Well. A Jarvis - Assistente Virtuale Cerimonie Agile
 INNOVATION COMPANY Learn Quickly & Think Well A Jarvis - Assistente Virtuale Cerimonie Agile Siamo una Innovation Company che affianca i propri clienti nel percorso di trasformazione digitale attraverso
INNOVATION COMPANY Learn Quickly & Think Well A Jarvis - Assistente Virtuale Cerimonie Agile Siamo una Innovation Company che affianca i propri clienti nel percorso di trasformazione digitale attraverso
Progetto ISOTRACTOR Laboratorio Isobus del Distretto della Meccanica Agricola
 Progetto ISOTRACTOR Laboratorio Isobus del Distretto della Meccanica Agricola Partner Imprese ARGO TRACTORS Spa WALVOIL Spa COMER INDUSTRIES Spa COBO GROUP Spa ARAG Srl OGNIBENE Spa RE:LAB Srl Laboratori/Enti
Progetto ISOTRACTOR Laboratorio Isobus del Distretto della Meccanica Agricola Partner Imprese ARGO TRACTORS Spa WALVOIL Spa COMER INDUSTRIES Spa COBO GROUP Spa ARAG Srl OGNIBENE Spa RE:LAB Srl Laboratori/Enti
Percezione visione. Corso di Robotica Parte di Laboratorio. Docente: Domenico Daniele Bloisi. Laurea magistrale in Ingegneria e scienze informatiche
 Novembre 2017 Laurea magistrale in Ingegneria e scienze informatiche Percezione visione Corso di Robotica Parte di Laboratorio Docente: Domenico Daniele Bloisi See-Think-Act Cycle Autonomous Mobile Robots
Novembre 2017 Laurea magistrale in Ingegneria e scienze informatiche Percezione visione Corso di Robotica Parte di Laboratorio Docente: Domenico Daniele Bloisi See-Think-Act Cycle Autonomous Mobile Robots
Small Defence Industrial Alliance Il soldato del futuro: tecnologie e scenari operativi. Napoli17/06/2016
 Small Defence Industrial Alliance Il soldato del futuro: tecnologie e scenari operativi Napoli17/06/2016 Copyright 2009 tutti i diritti riservati 3F & EDIN S.p.A. C.F. P. IVA e Registro Imprese di Napoli
Small Defence Industrial Alliance Il soldato del futuro: tecnologie e scenari operativi Napoli17/06/2016 Copyright 2009 tutti i diritti riservati 3F & EDIN S.p.A. C.F. P. IVA e Registro Imprese di Napoli
How to register for exam sessions ( Appelli ) Version updated on 17/10/2018
 Version updated on 17/10/2018") How to register for exam sessions ( Appelli ) Version updated on 17/10/2018 Course catalogue and Piano Carriera (Career Plan) At the beginning of your exchange period in Torino you will need to register
How to register for exam sessions ( Appelli ) Version updated on 17/10/2018 Course catalogue and Piano Carriera (Career Plan) At the beginning of your exchange period in Torino you will need to register
MIR veicolo a guida autonoma laser guidata
 MIR veicolo a guida autonoma laser guidata Gentile Cliente, di seguito ci pregiamo presentarle un breve riassunto sul veicolo a guida autonoma MIR, relativi vantaggi e accessori, da noi offerti. I VANTAGGI
MIR veicolo a guida autonoma laser guidata Gentile Cliente, di seguito ci pregiamo presentarle un breve riassunto sul veicolo a guida autonoma MIR, relativi vantaggi e accessori, da noi offerti. I VANTAGGI
È possibile caratterizzare un percorso formativo per gli studenti sulla base di due aree di specializzazione (indirizzi):
:") Percorsi per la Laurea Magistrale in Informatica Percorso Video Game LIKE THIS! Docenti di riferimento: Dario Maggiorini, Laura Anna Ripamonti Altri proponenti: Alberto Borghese, Danilo Bruschi, Davide
Percorsi per la Laurea Magistrale in Informatica Percorso Video Game LIKE THIS! Docenti di riferimento: Dario Maggiorini, Laura Anna Ripamonti Altri proponenti: Alberto Borghese, Danilo Bruschi, Davide
MISSION. Ideas and code!
 Ideas and code! MISSION È il partner tecnologico che supporta le aziende nelle scelte e nello sviluppo delle proprie strategie digitali. Nasce dall esperienza di diversi professionisti del web e di internet.
Ideas and code! MISSION È il partner tecnologico che supporta le aziende nelle scelte e nello sviluppo delle proprie strategie digitali. Nasce dall esperienza di diversi professionisti del web e di internet.
Introduzione all ambiente di sviluppo
 Laboratorio II Raffaella Brighi, a.a. 2005/06 Corso di Laboratorio II. A.A. 2006-07 CdL Operatore Informatico Giuridico. Introduzione all ambiente di sviluppo Raffaella Brighi, a.a. 2005/06 Corso di Laboratorio
Laboratorio II Raffaella Brighi, a.a. 2005/06 Corso di Laboratorio II. A.A. 2006-07 CdL Operatore Informatico Giuridico. Introduzione all ambiente di sviluppo Raffaella Brighi, a.a. 2005/06 Corso di Laboratorio
Automatic Tolerance Inspection via Reverse Engineering and PDM Feedback
 Automatic Tolerance Inspection via Reverse Engineering and PDM Feedback Michele Bici Ph.D. Student michele.bici@uniroma1.it Francesca Campana Associate Professor francesca.campana@uniroma1.it DIMA Dipartimento
Automatic Tolerance Inspection via Reverse Engineering and PDM Feedback Michele Bici Ph.D. Student michele.bici@uniroma1.it Francesca Campana Associate Professor francesca.campana@uniroma1.it DIMA Dipartimento
Corso di Laurea Magistrale in Ingegneria Informa4ca.
 Corso di Laurea Magistrale in Ingegneria Informa4ca http://www.dis.uniroma1.it/~ccl_ii Ingegneria Informa,ca L'ingegneria informa4ca è la branca dell'ingegneria che si occupa dell'analisi, del proge9o,
Corso di Laurea Magistrale in Ingegneria Informa4ca http://www.dis.uniroma1.it/~ccl_ii Ingegneria Informa,ca L'ingegneria informa4ca è la branca dell'ingegneria che si occupa dell'analisi, del proge9o,
PC-based Automation e sistemi distribuiti per l efficienza e flessibilità della Smart Factory. Angelo Caputi - Beckhoff Automation S.r.l.
 PC-based Automation e sistemi distribuiti per l efficienza e flessibilità della Smart Factory Angelo Caputi - Beckhoff Automation S.r.l. Innovazione continua per i Sistemi di Automazione Independent Cars
PC-based Automation e sistemi distribuiti per l efficienza e flessibilità della Smart Factory Angelo Caputi - Beckhoff Automation S.r.l. Innovazione continua per i Sistemi di Automazione Independent Cars