Meccatronica: Step Forward. Ing. Roberto Loce Solution Architect Motion Control
|
|
|
- Antonina Quaranta
- 4 anni fa
- Visualizzazioni
Transcript


1 Meccatronica: Step Forward Ing. Roberto Loce Solution Architect Motion Control

2 Tool di dimensionamento Sfrutta la simulazione del movimento della struttura meccanica, permessa da Solidworks, per la generazione dei profili di velocità e di coppia di meccaniche complesse al fine di poter analizzare in ogni dettaglio la configurazione e selezionare i prodotti più adeguati all interno del catalogo. Il tool di dimensionamento è un software che riceve in ingresso i dati di progettazione del costruttore della macchina e fornisce come risultato il coordinamento drive/motore consigliato Contiene diversi tool utili per l ottimizzazione, la simulazione e la previsione delle prestazioni










3 Tool di ottimizzazione Analisi rendimento del sistema Permette di esaltare le prestazioni della macchina e ridurre il consumo energetico. - Analisi delle tolleranze del sistema Permette di verificare quanto una macchina sarà insensibile alle modifiche dei dati iniziali Analisi stop di emergenza. Aiuta a massimizzare la produzione senza compromettere la sicurezza - Modello termico del sistema Utile per OEM che esportano verso paesi dei climi caldi. - Analisi del riduttore Guida i progettisti ad una soluzione ottimizzata - Tuning simulato del sistema Aiuta a ridurre gli errori di progettazione ed a risparmiare tempo in fase di messa in funzione. Analisi tolleranza sulla tensione di alimentazione Riduce il rischio di problemi sul campo che richiedono alti costi di supporto. - Interazione con 3D CAD Scaricare modelli dei prodotti e verificare il profili di movimento durante la progettazione meccanica. Stima della durata Dimensionamento di attuatori integrati con stima della vita e pianificazione della manutenzione.
4 Analisi della riduzione meccanica L analisi del fattore di riduzione è un tool che agevola i progettisti meccanici nella selezione di riduttore, cinghia, vite a ricircolo. Fornisce una visualizzazione immediata dell influenza della riduzione meccanica sulle grandezze dinamiche di quel movimento. Prima Una relazione non chiara fra la selezione dei componenti meccanici e le prestazioni del sistema, fa sì che venga usato nella maggior parte dei casi un approccio empirico Dopo Il tool di dimensionamento guida il progettista meccanico a selezionare la soluzione ottimale La modalità di selezione è più scientifica Impatto sul business Un ottimizzazione in fase progettuale migliora le prestazioni della macchina Utilizzo di motori, drive, protezioni più piccole e quindi minor ingombri nei quadri elettrici e costi inferiori
5 Analisi della riduzione meccanica L analisi del fattore di riduzione è un tool che agevola i progettisti meccanici nella selezione di riduttore, cinghia, vite a ricircolo. Fornisce una visualizzazione immediata dell influenza della riduzione meccanica sulle grandezze dinamiche di quel movimento. Prima Una relazione non chiara fra la selezione dei componenti meccanici e le prestazioni del sistema, fa sì che venga usato nella maggior parte dei casi un approccio empirico Dopo Il tool di dimensionamento guida il progettista meccanico a selezionare la soluzione ottimale La modalità di selezione è più scientifica Impatto sul business Un ottimizzazione in fase progettuale migliora le prestazioni della macchina Utilizzo di motori, drive, protezioni più piccole e quindi minor ingombri nei quadri elettrici e costi inferiori
 ed i parametri vitali dell applicazione (coppia, corrente, velocità ecc.). Questo dà un idea della flessibilità della macchina, permette di individuare i punti deboli ed evidenzia i limiti dell applicazione.")
6 Tolleranza sui dati di funzionamento L analisi sulla tolleranza dei dati permette di verificare velocemente il rapporto fra i dati dell applicazione (tempo di ciclo, massa, perdite, temperatura ambiente) ed i parametri vitali dell applicazione (coppia, corrente, velocità ecc.). Questo dà un idea della flessibilità della macchina, permette di individuare i punti deboli ed evidenzia i limiti dell applicazione. Prima I progettisti sono in grado spesso di selezionare un sistema servo ma difficilmente riescono a stabilire quali siano i limiti della macchina Il sistema a volte è già al limite Dopo Il tool di dimensionamento fornisce uno strumento per analizzare velocemente quanto la macchina sarà flessibile Mette in allarme il progettista riguardo a potenziali problematiche Impatto sul business Riduce la possibilità di fermi macchina dovuti a problematiche trascurate in fase di progettazione Rende chiari i limiti nelle specifiche della macchina
7 Tolleranza sui dati di funzionamento L analisi sulla tolleranza dei dati permette di verificare velocemente il rapporto fra i dati dell applicazione (tempo di ciclo, massa, perdite, temperatura ambiente) ed i parametri vitali dell applicazione (coppia, corrente, velocità ecc.). Questo dà un idea della flessibilità della macchina, permette di individuare i punti deboli ed evidenzia i limiti dell applicazione. Prima I progettisti sono in grado spesso di selezionare un sistema servo ma difficilmente riescono a stabilire quali siano i limiti della macchina Il sistema a volte è già al limite Dopo Il tool di dimensionamento fornisce uno strumento per analizzare velocemente quanto la macchina sarà flessibile Mette in allarme il progettista riguardo a potenziali problematiche Impatto sul business Riduce la possibilità di fermi macchina dovuti a problematiche trascurate in fase di progettazione Rende chiari i limiti nelle specifiche della macchina


8 Progettazione integrata Il tool di selezione dei componenti interagisce con l ambiente di progettazione CAD per ottimizzare gli aspetti più problematici dell applicazione; il risultato finale è la legge di moto più adatta alle scelte fatte da implementare direttamente nel programma del controllore.




9 Approccio tradizionale: macchina come somma di elementi separati Progettazione CAD Tool di selezione Realizzazione Programmazione del Motion Control Possibili problematiche e loro risoluzione sul campo

10 Benefici di un approccio Meccatronico Aumento del valore dell impianto - Il valore della macchina è prossimo alla sua capacità produttiva e flessibilità - Un ottimizzazione del progetto spesso da benefici in aumento di prestazioni senza costi aggiuntivi Sostenibilità - Gli utilizzatori delle macchine hanno aumentato la loro attenzione verso i consumi elettrici e la sostenibilità. - Analisi dell efficienza energetica aiuta a diminuire i consumi e gli sprechi. Maggior agilità nell innovazione - La prototipazione virtuale riduce i tempi di progettazione - Progetti complessi con un lead time più breve Riduzione del rischio - Ogni modifica al progetto ha un rischio associato - La simulazione aiuta a ridurre i rischi prevedendo le influenze che le modifiche avranno prima che accadano


11 Virtual Design Tool Il tool di dimensionamento unisce la meccanica con il controllore. Analizza, ottimizza, simula e seleziona in un ambiente virtuale prima di rilasciare il progetto finale.

12 Esempio di simulazione integrata Robot delta a due assi che si muove sul piano verticale XZ. Il movimento dei due bracci è realizzato con due motori lineari. I due bracci sono stati realizzati della stessa lunghezza. movimenti sull asse verticale (Z) si ottengono allontanando o avvicinando i due motori con la stessa legge di moto movimenti di traslazione in X lo si ottiengono muovendo entrambi i motori nella stessa direzione

13 Realizzazione del modello 3D Ambiente di progettazione: Solidworks Steps: Importazione modello slitta da librerie Creazione Subassembly Accoppiamenti parti Mates Animazione
14 Ciclo di lavoro

15 Ciclo di lavoro



16 Ciclo macchina Ottimizzazione del profilo di movimento

17 Analisi di moto Ambiente di progettazione dedicato alla simulazione E molto realistico in quanto nelle simulazioni che effettua tiene in considerazioni molte variabili che possono essere parametrizzate, ad esempio è possibile considerare forze e resistenze aggiuntive, è possibile considerare il comportamento elastico di molle, aggiungere l effetto della gravità sulle masse in movimento ed è inoltre possibile considerare anche gli attriti tra i componenti in movimento.

18 Grafici forza e velocità Selezionare quali variabili desidero vengano plottate dal sistema e trasferite al software per il dimensionamento del motore. Nella nostra applicazione sono stati impostati i seguenti plot: Motore destro Linear velocity Applied force Motore sinistro Linear velocity Applied force

19 Scambio dati tra SolidWorks e tool di dimensionamento Sequenza guidata nella selezione del motion study a cui si vuole associare l analisi dimensionale. Associazione assi Una volta completate queste pagine d impostazione, i profili di velocità dei motori verranno trasferiti al CAD che farà l analisi delle forze esercitate dal motore per far rispettare il profilo agli assi e completerà i grafici che precedentemente erano stati selezionati: Linear velocity e Applied force.
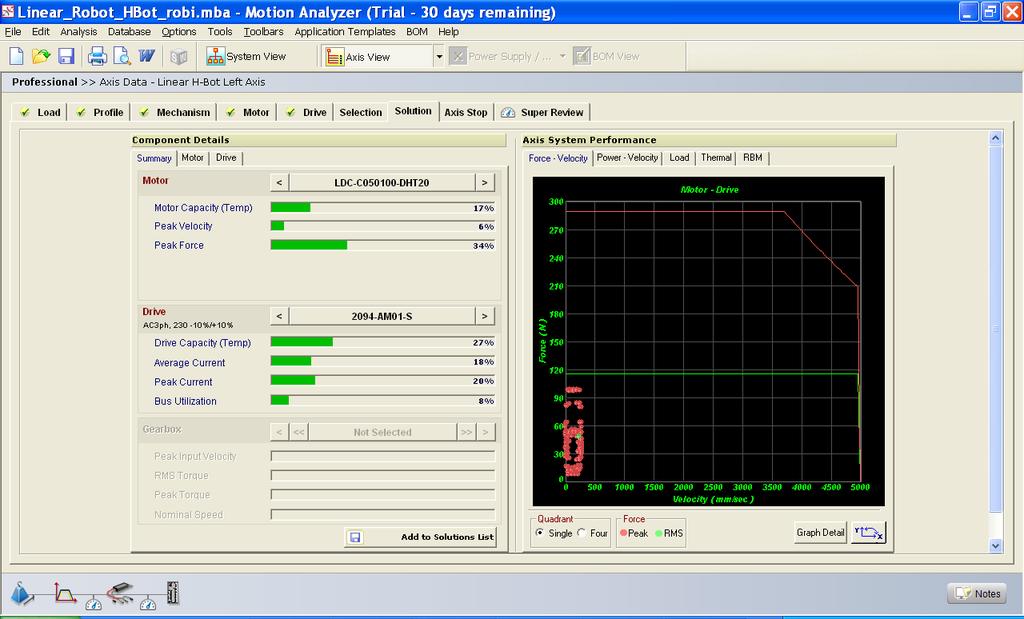
20 Risultato del dimensionamento
21 Risultati I grafici riportano le seguenti variabili dell asse sinistro: Posizione del motore Velocità istantanea motore Feedback di forza istantaneo Carico percentuale della forza nominale del motore La corrente di picco da noi calcolata è del 34% il valore realmente misurato è di circa 33,8 %. Il carico motore Rms da noi calcolato è del 17% il valore realmente misurato è del 16,7%



22 Utilizzo del profilo di moto ottimale nel software del controllore motion


23 Utilizzo del profilo di moto ottimale nel software del controllore motion Il profilo testato con il tool di dimensionamento può essere trasferito nel software del controllore in forma di istruzioni parametrizzabili dall utente e quindi modificabili durante il runtime.


24 Integrazione con il software PLC Funzioni di import ed export Dati del sistema motion trasferiti come file per il PLC Veloce ed affidabile scambio dati tra il software PLC e il tool di dimensionamento
25 Grazie per l attenzione!
Approccio Meccatronico alla progettazione. Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation
 Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
Dimensionamento di un sistema trasloelevatore per magazzini automatici: le interazioni tra i componenti meccatronici. Michele Ragone SEW EURODRIVE
 Dimensionamento di un sistema trasloelevatore per magazzini automatici: le interazioni tra i componenti meccatronici Michele Ragone SEW EURODRIVE Progettazione di un sistema di azionamento Nella progettazione
Dimensionamento di un sistema trasloelevatore per magazzini automatici: le interazioni tra i componenti meccatronici Michele Ragone SEW EURODRIVE Progettazione di un sistema di azionamento Nella progettazione
Supporto meccatronico alla progettazione di macchine. Dall esigenza del costruttore al prototipo virtuale
 Supporto meccatronico alla progettazione di macchine Dall esigenza del costruttore al prototipo virtuale L evoluzione: dal motore principale + Motore principale Trasmissione meccanica Camme meccaniche
Supporto meccatronico alla progettazione di macchine Dall esigenza del costruttore al prototipo virtuale L evoluzione: dal motore principale + Motore principale Trasmissione meccanica Camme meccaniche
Sommario Introduzione Il progetto motoruota Obiettivi della tesi Layout meccanico del sistema.3
 Sommario _ Capitolo 1 Analisi preliminare 1.1. Introduzione.1 1.1.1. Il progetto motoruota 1 1.1.2. Obiettivi della tesi 2 1.2. Layout meccanico del sistema.3 1.2.1. Trasmissione ad asse cavo...3 1.2.2.
Sommario _ Capitolo 1 Analisi preliminare 1.1. Introduzione.1 1.1.1. Il progetto motoruota 1 1.1.2. Obiettivi della tesi 2 1.2. Layout meccanico del sistema.3 1.2.1. Trasmissione ad asse cavo...3 1.2.2.
L evoluzione: dal motore principale
 Supporto meccatronico alla progettazione di macchine Dall esigenza del costruttore al prototipo virtuale L evoluzione: dal motore principale + Motore principale Trasmissione meccanica Camme meccaniche
Supporto meccatronico alla progettazione di macchine Dall esigenza del costruttore al prototipo virtuale L evoluzione: dal motore principale + Motore principale Trasmissione meccanica Camme meccaniche
LA MECCATRONICA SPIEGATA DALLE AZIENDE: PRESENTE E FUTURO DELLA PROGETTAZIONE DI MACCHINE. Udine, 4 dicembre 2014
 LA MECCATRONICA SPIEGATA DALLE AZIENDE: PRESENTE E FUTURO DELLA PROGETTAZIONE DI MACCHINE Udine, 4 dicembre 2014 Agenda MODERATORE Ing. Marco Vecchio, Segretario ANIE Automazione INTERVENTI INTRODUTTIVI
LA MECCATRONICA SPIEGATA DALLE AZIENDE: PRESENTE E FUTURO DELLA PROGETTAZIONE DI MACCHINE Udine, 4 dicembre 2014 Agenda MODERATORE Ing. Marco Vecchio, Segretario ANIE Automazione INTERVENTI INTRODUTTIVI
Come integrare precisione, efficienza energetica e progettuale tramite la digitalizzazione
 Logo Come integrare precisione, efficienza energetica e progettuale tramite la digitalizzazione Paolo Andreoli / Paolo Sticchi - Lenze Italia Agenda 1. La meccanica nell era industriale 4.0 Lo spazio d
Logo Come integrare precisione, efficienza energetica e progettuale tramite la digitalizzazione Paolo Andreoli / Paolo Sticchi - Lenze Italia Agenda 1. La meccanica nell era industriale 4.0 Lo spazio d
Micro Servoazionamento Passo-Passo - ViX
 Micro Servoazionamento www.parker-eme.com/stepper Micro Servoazionamento Breve panoramica Descrizione La serie ViX, servoazionamenti digitali intelligenti di Parker, viene completata con l aggiunta della
Micro Servoazionamento www.parker-eme.com/stepper Micro Servoazionamento Breve panoramica Descrizione La serie ViX, servoazionamenti digitali intelligenti di Parker, viene completata con l aggiunta della
Da quanto tempo non vedete una cosa. per la prima volta? L-force Il vostro futuro il nostro motore
 Da quanto tempo non vedete una cosa per la prima volta? L-force Il vostro futuro il nostro motore Per noi è normale vedere cose per la prima volta. Prima di tutti gli altri. 2 È il vostro futuro che ci
Da quanto tempo non vedete una cosa per la prima volta? L-force Il vostro futuro il nostro motore Per noi è normale vedere cose per la prima volta. Prima di tutti gli altri. 2 È il vostro futuro che ci
PIANO DI STUDIO DELLA DISCIPLINA DISCIPLINA: Disegno progettazione ed organizzazione industriale
 DISCIPLINA: Disegno progettazione ed organizzazione industriale PIANO DELLE 5^ ANNO - SETTORE ISTRUZIONE TECNICA - MECCATRONICA Anno scolastico 2018/2019 COMPETENZE della ABILITA n. 1 Applicare le normative
DISCIPLINA: Disegno progettazione ed organizzazione industriale PIANO DELLE 5^ ANNO - SETTORE ISTRUZIONE TECNICA - MECCATRONICA Anno scolastico 2018/2019 COMPETENZE della ABILITA n. 1 Applicare le normative
La tecnologia di comunicazione ProfiNET
 La tecnologia di comunicazione ProfiNET Realizzazione di una macchina modulare per finishing e stampa di e5che6e adesive Ing. Davide Sabini Application Center Bologna Mail : davide.sabini@siemens.com Introduzione
La tecnologia di comunicazione ProfiNET Realizzazione di una macchina modulare per finishing e stampa di e5che6e adesive Ing. Davide Sabini Application Center Bologna Mail : davide.sabini@siemens.com Introduzione
Controllo di un Apparato di Movimentazione
 Esami di Stato per l'abilitazione all'esercizio della professione di Ingegnere Sessione I - 2006 Vecchio Ordinamento Ingegneria Informatica - Tema n. 3 Controllo di un Apparato di Movimentazione Lo schema
Esami di Stato per l'abilitazione all'esercizio della professione di Ingegnere Sessione I - 2006 Vecchio Ordinamento Ingegneria Informatica - Tema n. 3 Controllo di un Apparato di Movimentazione Lo schema
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
DESCRIZIONE DELLE ATTIVITÀ DEL CORSO
 DESCRIZIONE DELLE ATTIVITÀ DEL CORSO Modulo 1 - Colloquio conoscitivo e test d ingresso Lo scopo del primo modulo formativo è quello di acquisire il livello di conoscenza dei partecipanti alla progettazione
DESCRIZIONE DELLE ATTIVITÀ DEL CORSO Modulo 1 - Colloquio conoscitivo e test d ingresso Lo scopo del primo modulo formativo è quello di acquisire il livello di conoscenza dei partecipanti alla progettazione
Sistemi E Tecnologie per l'automazione LM
 Laurea Magistrale in Ingegneria Informatica Laurea Magistrale in Ingegneria Elettronica e Telecomunicazioni per lo Sviluppo Sostenibile Sistemi E Tecnologie per l'automazione LM ESAME 7 GENNAIO 2013 Ing.
Laurea Magistrale in Ingegneria Informatica Laurea Magistrale in Ingegneria Elettronica e Telecomunicazioni per lo Sviluppo Sostenibile Sistemi E Tecnologie per l'automazione LM ESAME 7 GENNAIO 2013 Ing.
Strumenti digitali Bonfiglioli. Supporto per una progettazione efficiente PRODOTTI E SOLUZIONI
 Strumenti digitali Bonfiglioli Supporto per una progettazione efficiente PRODOTTI E SOLUZIONI Strumenti digitali Bonfiglioli 3 Strumenti digitali Bonfiglioli EPLAN Miglioramento della progettazione elettrica
Strumenti digitali Bonfiglioli Supporto per una progettazione efficiente PRODOTTI E SOLUZIONI Strumenti digitali Bonfiglioli 3 Strumenti digitali Bonfiglioli EPLAN Miglioramento della progettazione elettrica
Un approccio innovativo alla progettazione degli stampi
 Un approccio innovativo alla progettazione degli stampi Andrea Panvini Università degli Studi di Brescia PiQ 2 Tommaso Botter PiQ 2 info@piq2.com IL CLIENTE RICHIEDE: Maggiore complessità dei prodotti
Un approccio innovativo alla progettazione degli stampi Andrea Panvini Università degli Studi di Brescia PiQ 2 Tommaso Botter PiQ 2 info@piq2.com IL CLIENTE RICHIEDE: Maggiore complessità dei prodotti
CURVATUBI CNC TOTALMENTE ELETTRICA
 CURVATUBI CNC TOTALMENTE ELETTRICA Le curvatubi CNC completemente ele riche della serie rappresentano il massimo nella tecnologia di curvatura. Con la possibilità di u lizzare le a rezzature mul raggio,
CURVATUBI CNC TOTALMENTE ELETTRICA Le curvatubi CNC completemente ele riche della serie rappresentano il massimo nella tecnologia di curvatura. Con la possibilità di u lizzare le a rezzature mul raggio,
Attuatori. Gli attuatori costituiscono gli elementi che controllano e permettono il movimento delle parti
 Attuatori Gli attuatori costituiscono gli elementi che controllano e permettono il movimento delle parti meccaniche di una macchina automatica. Sono una componente della parte operativa di una macchina
Attuatori Gli attuatori costituiscono gli elementi che controllano e permettono il movimento delle parti meccaniche di una macchina automatica. Sono una componente della parte operativa di una macchina
UNIVERSITA DEGLI STUDI DI BRESCIA
 UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
1.1 Simboli, definizioni e unità di misura Dimensionamento del riduttore Calcolo della vita dei cuscinetti... 6 TQ
 SOMMARIO 1 Informazioni generali... 1.1 Simboli, definizioni e unità di misura... 1.2 Dimensionamento del riduttore... 4 1. Calcolo della vita dei cuscinetti... 6 2 Caratteristiche della serie TQ... 8
SOMMARIO 1 Informazioni generali... 1.1 Simboli, definizioni e unità di misura... 1.2 Dimensionamento del riduttore... 4 1. Calcolo della vita dei cuscinetti... 6 2 Caratteristiche della serie TQ... 8
MAPPA DELLE COMPETENZE INTERDISCIPLINARI (DIPARTIMENTALI) A.SC MECCATRONICA CODICE ASSE:PROFESSIONALE QUINTO ANNO
 A.SC MECCATRONICA CODICE ASSE:PROFESSIONALE QUINTO ANNO") Saper utilizzare grafici, schemi e tabelle Conoscere le tecniche di rappresentazione grafica Saper produrre la documentazione tecnica del progetto Metodi di pianificazione monitoraggio e coordinamento
Saper utilizzare grafici, schemi e tabelle Conoscere le tecniche di rappresentazione grafica Saper produrre la documentazione tecnica del progetto Metodi di pianificazione monitoraggio e coordinamento
PIANO DI STUDIO DELLA DISCIPLINA
 Tel. 0331635718 fax 0331679586 info@isisfacchinetti.gov.it www.isisfacchinetti.gov.it ISIS C. Facchinetti Sede: via Azimonti, 5-21053 Castellanza Rev. 1 del 3/11/16 DISCIPLINA: Disegno progettazione ed
Tel. 0331635718 fax 0331679586 info@isisfacchinetti.gov.it www.isisfacchinetti.gov.it ISIS C. Facchinetti Sede: via Azimonti, 5-21053 Castellanza Rev. 1 del 3/11/16 DISCIPLINA: Disegno progettazione ed
D2.1 MICROMANIPOLATORE A 4-GDL PROGETTO DI MASSIMA
 MM&A Micro Manipulation and Assembly D2.1 MICROMANIPOLATORE A 4-GDL PROGETTO DI MASSIMA Documento interno MM&A-PRIN2009-0001 Progetto PRIN2009 Coordinatore scientifico Prof. Giovanni Legnani Data 20/07/2012
MM&A Micro Manipulation and Assembly D2.1 MICROMANIPOLATORE A 4-GDL PROGETTO DI MASSIMA Documento interno MM&A-PRIN2009-0001 Progetto PRIN2009 Coordinatore scientifico Prof. Giovanni Legnani Data 20/07/2012
DIMENSIONAMENTO DEL FASATORE Per un corretto dimensionamento del fasatore è necessario operare come segue:
 DIMENSIONAMENTO DEL FASATORE Per un corretto dimensionamento del fasatore è necessario operare come segue: definizione dei dati del dell applicazione (A) calcolo della potenza reale continua (B) verifica
DIMENSIONAMENTO DEL FASATORE Per un corretto dimensionamento del fasatore è necessario operare come segue: definizione dei dati del dell applicazione (A) calcolo della potenza reale continua (B) verifica
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 SETTORE MECCANICA; PRODUZIONE E MANUTENZIONE DI MACCHINE; IMPIANTISTICA Processo Lavorazioni Meccaniche
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 SETTORE MECCANICA; PRODUZIONE E MANUTENZIONE DI MACCHINE; IMPIANTISTICA Processo Lavorazioni Meccaniche
TOMTOM: Come risolvere un problema di grave deformazione su un componente del sistema di navigazione
 TOMTOM: Come risolvere un problema di grave deformazione su un componente del sistema di navigazione Premessa Il prodotto in questo caso è un coperchio anteriore della culla di un sistema di navigazione
TOMTOM: Come risolvere un problema di grave deformazione su un componente del sistema di navigazione Premessa Il prodotto in questo caso è un coperchio anteriore della culla di un sistema di navigazione
MAPPA DELLE COMPETENZE a.sc CODICE ASSE: PROFESSIONALE TERZO ANNO QUARTO ANNO
 COMPETENZE IN ESITO (2 BIENNIO) ABILITA' CONOSCENZE ABILITA' CONOSCENZE Saper utilizzare grafici, schemi e tabelle Conoscere le tecniche di rappresentazione grafica Saper utilizzare grafici, schemi e tabelle
COMPETENZE IN ESITO (2 BIENNIO) ABILITA' CONOSCENZE ABILITA' CONOSCENZE Saper utilizzare grafici, schemi e tabelle Conoscere le tecniche di rappresentazione grafica Saper utilizzare grafici, schemi e tabelle
INFO ESTERNA Industry sector
 INFO ESTERNA Industry sector Nr:2011/1.7/3 Data: 21.1.11 PLC: Safety Nuova CPU S7 317TF-2 DP Con la presente s informa che è da ora disponibile la nuova CPU S7 317TF-2 DP che unisce in un unico prodotto
INFO ESTERNA Industry sector Nr:2011/1.7/3 Data: 21.1.11 PLC: Safety Nuova CPU S7 317TF-2 DP Con la presente s informa che è da ora disponibile la nuova CPU S7 317TF-2 DP che unisce in un unico prodotto
Approccio Meccatronico nelle soluzioni di connessione I/O. Ing. Stefano Schiavella
 Approccio Meccatronico nelle soluzioni di connessione I/O Ing. Stefano Schiavella Agenda Sistema di connessione I/O Approccio tradizionale e moderno di connessione I/O Fasi di progettazione delle connessioni
Approccio Meccatronico nelle soluzioni di connessione I/O Ing. Stefano Schiavella Agenda Sistema di connessione I/O Approccio tradizionale e moderno di connessione I/O Fasi di progettazione delle connessioni
TQ TQ TQ TQ TQ
 SOMMARIO 1 Informazioni generali... 1.1 Simboli, definizioni e unità di misura... 1.2 Dimensionamento del riduttore... 4 1. Calcolo della vita dei cuscinetti... 6 2 Caratteristiche della serie TQ... 8
SOMMARIO 1 Informazioni generali... 1.1 Simboli, definizioni e unità di misura... 1.2 Dimensionamento del riduttore... 4 1. Calcolo della vita dei cuscinetti... 6 2 Caratteristiche della serie TQ... 8
Sistemi di simulazione cinematica e dinamica per la progettazione meccanica
 REL. :PERONI PAOLO DOTTORATO XXI CICLO PRIMO ANNO 23/10/06 Sistemi di simulazione cinematica e dinamica per la progettazione meccanica PROGETTAZIONE DI MACCHINE AUTOMATICHE CARATTERISTICHE DIMENSIONALI
REL. :PERONI PAOLO DOTTORATO XXI CICLO PRIMO ANNO 23/10/06 Sistemi di simulazione cinematica e dinamica per la progettazione meccanica PROGETTAZIONE DI MACCHINE AUTOMATICHE CARATTERISTICHE DIMENSIONALI
Attuatori lineari. Affidabili Compatti Precisi
 cyber force Attuatori lineari Affidabili Compatti Precisi 163 Le vostre applicazioni WITTENSTEIN Utilizzo senza confini Inserimento Attuatori lineari con elevato grado di ripetibilità, ideali per processi
cyber force Attuatori lineari Affidabili Compatti Precisi 163 Le vostre applicazioni WITTENSTEIN Utilizzo senza confini Inserimento Attuatori lineari con elevato grado di ripetibilità, ideali per processi
Interfaccia aptica a 5 gdl per la riabilitazione degli arti superiori
 www.fisiokinesiterapia.biz Interfaccia aptica a 5 gdl per la riabilitazione degli arti superiori Neuroriabilitazione post-stroke stroke Fase acuta Italia 196.000 Veneto 10.000 Padova 2.200 Fase cronica
www.fisiokinesiterapia.biz Interfaccia aptica a 5 gdl per la riabilitazione degli arti superiori Neuroriabilitazione post-stroke stroke Fase acuta Italia 196.000 Veneto 10.000 Padova 2.200 Fase cronica
ROBOTICA INDUSTRIALE PRIMO PERCORSO
 ROBOTICA INDUSTRIALE PRIMO PERCORSO ROB1 Manutenzione installazione programmazione dell interfacciamento di sistemi industriali robotizzati Prerequisiti Per accedere è richiesto un diploma d istituto tecnico
ROBOTICA INDUSTRIALE PRIMO PERCORSO ROB1 Manutenzione installazione programmazione dell interfacciamento di sistemi industriali robotizzati Prerequisiti Per accedere è richiesto un diploma d istituto tecnico
ISTITUTO D ISTRUZIONE SECONDARIA I.I.S. VIA SILVESTRI 301 Plesso Alessandro Volta
 ISTITUTO D ISTRUZIONE SECONDARIA I.I.S. VIA SILVESTRI 301 Plesso Alessandro Volta * Programma di Fisica A.S. 2017-2018 Classe 1E PROGRAMMA SVOLTO La fisica: temi e finalità I fenomeni fisici e le loro
ISTITUTO D ISTRUZIONE SECONDARIA I.I.S. VIA SILVESTRI 301 Plesso Alessandro Volta * Programma di Fisica A.S. 2017-2018 Classe 1E PROGRAMMA SVOLTO La fisica: temi e finalità I fenomeni fisici e le loro
Efficienza nelle Mechatronic Motion Solutions. FESTO Florinda Salomone 1
 Efficienza nelle Mechatronic Motion Solutions FESTO 1 Mechatronic Motion Solutions @Festo Mechatronic...... Combinare differenti tecnologiepneumatica, servo-pneumatica, meccanica, elettrica- per creare
Efficienza nelle Mechatronic Motion Solutions FESTO 1 Mechatronic Motion Solutions @Festo Mechatronic...... Combinare differenti tecnologiepneumatica, servo-pneumatica, meccanica, elettrica- per creare
SISTEMI ELEMENTARI. Prof. Laura Giarré https://giarre.wordpress.com/ca/ Sistemi Elementari CA Prof.
 SISTEMI ELEMENTARI Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Sistemi Elementari CA 2017 2018 Prof. Laura Giarré 1 Principi di modellistica Problema: determinare il modello
SISTEMI ELEMENTARI Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Sistemi Elementari CA 2017 2018 Prof. Laura Giarré 1 Principi di modellistica Problema: determinare il modello
Sistema a Triplo Asse TPD-M
 Sistema a Triplo Asse www.parker-eme.com/tpdm Sistema a Triplo Asse Breve panoramica Descrizione è un sistema multiasse per cui ciascun modulo può alimentare fino a tre servomotori. La configurazione base
Sistema a Triplo Asse www.parker-eme.com/tpdm Sistema a Triplo Asse Breve panoramica Descrizione è un sistema multiasse per cui ciascun modulo può alimentare fino a tre servomotori. La configurazione base
Passo vite da 5 a 50 mm / rev 5 taglie differenti
 Attuatori a vite ET Elettrocilindri Per motion, posizionamento, settaggio ed avviamento precisi, l attuatore a vite ET offre: Corse fino a 2400 mm 44500 N Ripetibilità ± 0.07 mm (fino a ± 0.01 mm) Velocità
Attuatori a vite ET Elettrocilindri Per motion, posizionamento, settaggio ed avviamento precisi, l attuatore a vite ET offre: Corse fino a 2400 mm 44500 N Ripetibilità ± 0.07 mm (fino a ± 0.01 mm) Velocità
DISEGNO MECCANICO INDUSTRIALE PRIMO PERCORSO
 DISEGNO MECCANICO INDUSTRIALE PRIMO PERCORSO PM1 Modellazione solida parametrica e rappresentazione di organi di macchine 3D Prerequisiti Per accedere è opportuna la conoscenza elementare del disegno tecnico
DISEGNO MECCANICO INDUSTRIALE PRIMO PERCORSO PM1 Modellazione solida parametrica e rappresentazione di organi di macchine 3D Prerequisiti Per accedere è opportuna la conoscenza elementare del disegno tecnico
Il caso reale: come operano il costruttore di macchine e il cliente finale. Ing. Emanuele Dallasta
 Il caso reale: come operano il costruttore di macchine e il cliente finale Ing. Emanuele Dallasta L ATTIVITA DI EVIFILL Confezionamento per conto terzi di monodosi Progettazione e realizzazione di macchine
Il caso reale: come operano il costruttore di macchine e il cliente finale Ing. Emanuele Dallasta L ATTIVITA DI EVIFILL Confezionamento per conto terzi di monodosi Progettazione e realizzazione di macchine
Piattaforme di automazione e servosistemi di ultima generazione: Trasparenza Integrazione Prestazioni assolute 29 ottobre 2013
 ROBERTO BECCALLI SAVE 2013 Piattaforme di automazione e servosistemi di ultima generazione: Trasparenza Integrazione Prestazioni assolute 29 ottobre 2013 Affidabilità Alte prestazioni Sicurezza Obiettivi
ROBERTO BECCALLI SAVE 2013 Piattaforme di automazione e servosistemi di ultima generazione: Trasparenza Integrazione Prestazioni assolute 29 ottobre 2013 Affidabilità Alte prestazioni Sicurezza Obiettivi
Intel Parallel Studio Seminar Milano 22 Giugno 2010
 Dal seriale al parallelo Come ottimizzare le applicazioni Visual Studio per macchine multi-core: Intel Parallel Studio Ciro Fiorillo Lead Software Architect Agenda 09:15 Saluto di benvenuto e apertura
Dal seriale al parallelo Come ottimizzare le applicazioni Visual Studio per macchine multi-core: Intel Parallel Studio Ciro Fiorillo Lead Software Architect Agenda 09:15 Saluto di benvenuto e apertura
Riduttori epicicloidali a gioco ridotto Linea General
 Riduttori epicicloidali a gioco ridotto Linea General alpha Value Line Talenti individuali Riduttore epicicloidale a gioco ridotto con albero (P, PL, PS, PR) o flangia in uscita (PT)) Funzionamento ciclico
Riduttori epicicloidali a gioco ridotto Linea General alpha Value Line Talenti individuali Riduttore epicicloidale a gioco ridotto con albero (P, PL, PS, PR) o flangia in uscita (PT)) Funzionamento ciclico
Sistemi di trasporto lineari curvilinei e planari nel mondo dell Industria 4.0
 Logo Sistemi di trasporto lineari curvilinei e planari nel mondo dell Industria 4.0 Maximiliano Bonsi Beckhoff Automation S.r.l. Nuove sfide nel mondo della produzione di beni di consumo Sempre più persone
Logo Sistemi di trasporto lineari curvilinei e planari nel mondo dell Industria 4.0 Maximiliano Bonsi Beckhoff Automation S.r.l. Nuove sfide nel mondo della produzione di beni di consumo Sempre più persone
Stabilimento Pilkington di San Salvo. Sistema di monitoraggio dell energia Sergio Vellante Managing Director Lenze Italia
 Stabilimento Pilkington di San Salvo Sistema di monitoraggio dell energia Sergio Vellante Managing Director Lenze Italia Lo stabilimento CRS Pilkington a S. Salvo Una breve introduzione Estensione di impianto
Stabilimento Pilkington di San Salvo Sistema di monitoraggio dell energia Sergio Vellante Managing Director Lenze Italia Lo stabilimento CRS Pilkington a S. Salvo Una breve introduzione Estensione di impianto
grindsmart nano5 italiano
 grindsmart nano5 italiano GAMMA DI LAVORO Gamma Ø 0.3 6.35 mm Gamma gambi 1.0 6.35 mm Lungh. tagliente 30 mm Lungh. totale 100 mm CONTROLLO FANUC 30iMB Asse X Corsa 146 mm Rapido 15 m/min Risoluzione
grindsmart nano5 italiano GAMMA DI LAVORO Gamma Ø 0.3 6.35 mm Gamma gambi 1.0 6.35 mm Lungh. tagliente 30 mm Lungh. totale 100 mm CONTROLLO FANUC 30iMB Asse X Corsa 146 mm Rapido 15 m/min Risoluzione
Introduzione al Corso
 Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Introduzione -
Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Introduzione -
Controlli Automatici L
 Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Introduzione -
Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Introduzione -
Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione rotativa.
 EasyROT package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione rotativa. Pacchetto composto da : o Attuatore rotante Rotac o servo attuatore Servorotac
EasyROT package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione rotativa. Pacchetto composto da : o Attuatore rotante Rotac o servo attuatore Servorotac
SOLUZIONI SOSTENIBILI
 SOLUZIONI SOSTENIBILI PER L EFFICIENZA ENERGETICA PRODUTTIVA Il mondo di FANUC pensa all ambiente La nostra sede giapponese si trova alle pendici del monte Fuji, circondata da foreste e laghi, all interno
SOLUZIONI SOSTENIBILI PER L EFFICIENZA ENERGETICA PRODUTTIVA Il mondo di FANUC pensa all ambiente La nostra sede giapponese si trova alle pendici del monte Fuji, circondata da foreste e laghi, all interno
Scheda tecnica online. FX3-MOC Flexi Soft Drive Monitor CONTROLLO SICUREZZA MOTION-CONTROL
 Scheda tecnica online FX3-MOC000000 Flexi Soft Drive Monitor A B C D E F H I J K L M N O P Q R S T Dati tecnici in dettaglio Caratteristiche Modulo Tipo di configurazione Informazioni per l'ordine Tipo
Scheda tecnica online FX3-MOC000000 Flexi Soft Drive Monitor A B C D E F H I J K L M N O P Q R S T Dati tecnici in dettaglio Caratteristiche Modulo Tipo di configurazione Informazioni per l'ordine Tipo
Attuatori con Direct Drive PSD. per il cambio formato automatico
 Attuatori con Direct Drive PSD per il cambio formato automatico DIRECT DRIVE PIÙ COMPATTI, PIÙ VELOCI, PIÙ... La nuova serie Direct Drive di halstrupwalcher Gli attuatori serie PSD sono sistemi meccatronici
Attuatori con Direct Drive PSD per il cambio formato automatico DIRECT DRIVE PIÙ COMPATTI, PIÙ VELOCI, PIÙ... La nuova serie Direct Drive di halstrupwalcher Gli attuatori serie PSD sono sistemi meccatronici
DIMENSIONAMENTO DEL RINVIO ANGOLARE Per un corretto dimensionamento del rinvio angolare è necessario operare come segue:
 DIMENSIONAMENTO DEL RINVIO ANGOLARE Per un corretto dimensionamento del rinvio angolare è necessario operare come segue: definizione dei dati del dell applicazione (A) calcolo della potenza reale continua
DIMENSIONAMENTO DEL RINVIO ANGOLARE Per un corretto dimensionamento del rinvio angolare è necessario operare come segue: definizione dei dati del dell applicazione (A) calcolo della potenza reale continua
TQK TQK TQK TQK TQK
 SOMMARIO 1 Informazioni generali... 1.1 Simboli, definizioni e unità di misura... 1.2 Dimensionamento del riduttore... 4 1. Calcolo della vita dei cuscinetti... 6 2 Caratteristiche della serie TQK... 8
SOMMARIO 1 Informazioni generali... 1.1 Simboli, definizioni e unità di misura... 1.2 Dimensionamento del riduttore... 4 1. Calcolo della vita dei cuscinetti... 6 2 Caratteristiche della serie TQK... 8
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
Sistemi Dinamici a Tempo Continuo
 Parte 2 Aggiornamento: Febbraio 2012 Parte 2, 1 T Sistemi Dinamici a Tempo Continuo Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi
Parte 2 Aggiornamento: Febbraio 2012 Parte 2, 1 T Sistemi Dinamici a Tempo Continuo Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi
Esempi di Sistemi di Controllo e prime definizioni. Automatica ROMA TRE Stefano Panzieri- 1
 Esempi di Sistemi di Controllo e prime definizioni Automatica ROMA TRE Stefano Panzieri- 1 Controllo di temperatura T desiderata Sensore di temperatura (termostato) Attuatore (relais) Riscaldatore + acqua
Esempi di Sistemi di Controllo e prime definizioni Automatica ROMA TRE Stefano Panzieri- 1 Controllo di temperatura T desiderata Sensore di temperatura (termostato) Attuatore (relais) Riscaldatore + acqua
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms
 Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Part II Prefazione Elenco degli Autori
 Indice Part II Prefazione Elenco degli Autori vii xvii La modellazione nei sistemi meccanici 21 20.1 Cenni storici 21 20.2 Che cosa si intende per modellazione? 22 20.3 Che cosa si intende per modello
Indice Part II Prefazione Elenco degli Autori vii xvii La modellazione nei sistemi meccanici 21 20.1 Cenni storici 21 20.2 Che cosa si intende per modellazione? 22 20.3 Che cosa si intende per modello
ROBOTICA Syllabus Versione 1.0
 ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
Dimensionamento di un sistema trasloelevatore per magazzini automatici: le interazioni tra i componenti meccatronici
 Dimensionamento di un sistema trasloelevatore per magazzini automatici: le interazioni tra i componenti meccatronici Giuseppe Testa Sales Director LENZE ITALIA giuseppe.testa@lenze.com il convogliatore
Dimensionamento di un sistema trasloelevatore per magazzini automatici: le interazioni tra i componenti meccatronici Giuseppe Testa Sales Director LENZE ITALIA giuseppe.testa@lenze.com il convogliatore
Informazioni sulla Macchina
 PSM Informazioni sulla Macchina INDICE: DESCRIZIONE E CARATTERISTICHE PRINCIPALI LAYOUT DATI TECNICI NOMINALI CONFIGURAZIONE Sealed Air S.r.l. Via Trento 7 Casella Postale 108 I-20017 Passirana di Rho
PSM Informazioni sulla Macchina INDICE: DESCRIZIONE E CARATTERISTICHE PRINCIPALI LAYOUT DATI TECNICI NOMINALI CONFIGURAZIONE Sealed Air S.r.l. Via Trento 7 Casella Postale 108 I-20017 Passirana di Rho
Strumenti di misura modulari
 modulari Analogici e digitali per misure in corrente alternata Voltmetro e amperometro analogici Per una facile e precisa lettura della tensione e della corrente. Sono costituiti da indici a bobina mobile
modulari Analogici e digitali per misure in corrente alternata Voltmetro e amperometro analogici Per una facile e precisa lettura della tensione e della corrente. Sono costituiti da indici a bobina mobile
Titolo: Supervisione di uno stabilimento produttivo tramite telecontrollo con il concetto Industry 4.0
 Lenze Italia S.r.l. Press & Communication Contatti stampa Elisa Nossa Indirizzo Viale Tibaldi, 7 20136 Milano Telefono +39 02 270 98 298 Fax +39 02 270 98 290 E-mail elisa.nossa@lenze.com Sito Web www.lenzeitalia.it
Lenze Italia S.r.l. Press & Communication Contatti stampa Elisa Nossa Indirizzo Viale Tibaldi, 7 20136 Milano Telefono +39 02 270 98 298 Fax +39 02 270 98 290 E-mail elisa.nossa@lenze.com Sito Web www.lenzeitalia.it
Software CA D /CA M con precisione e controllo di livello mondiale... Novità
 Novità SURFCAM V5.2 What s New Page 1 of 19 February 2011 Software CA D CAD/CAM M con precisione Software with e controllo world class di precision livello and mondiale... control... Novità in SURFCAM
Novità SURFCAM V5.2 What s New Page 1 of 19 February 2011 Software CA D CAD/CAM M con precisione Software with e controllo world class di precision livello and mondiale... control... Novità in SURFCAM
SPESSORI PRESSABILI DEL PANNELLO. : Max x 2000 h. mm. : Kg. Circa
 LINEA AUTOMATICA PER VETROCAMERA Mod. M 2001E PA ALIMENTAZIONE ELETTRICA POTENZA TOTALE ASSORBITA MOTORE VENTILATORE MISURE VETRO LAVABILE RESISTENZA ACQUA CALDA SPESSORI LAVABILI VETRO SPESSORI PRESSABILI
LINEA AUTOMATICA PER VETROCAMERA Mod. M 2001E PA ALIMENTAZIONE ELETTRICA POTENZA TOTALE ASSORBITA MOTORE VENTILATORE MISURE VETRO LAVABILE RESISTENZA ACQUA CALDA SPESSORI LAVABILI VETRO SPESSORI PRESSABILI
Modello di Pianificazione e Ottimizzazione. Valido per la produzione su linea e per l impiego di famiglie produttive
 Modello di Pianificazione e Ottimizzazione Valido per la produzione su linea e per l impiego di famiglie produttive Descrizione Modello E un modello che: Integra fortemente la funzione delle vendite con
Modello di Pianificazione e Ottimizzazione Valido per la produzione su linea e per l impiego di famiglie produttive Descrizione Modello E un modello che: Integra fortemente la funzione delle vendite con
Attuatori meccatronici per esigenze estreme. Sistemi integrati da un unico fornitore
 Attuatori meccatronici per esigenze estreme Sistemi integrati da un unico fornitore Soluzioni per applicazioni speciali in condizioni ambientali estreme nello spazio, sulla terra e in mare I vostri vantaggi:
Attuatori meccatronici per esigenze estreme Sistemi integrati da un unico fornitore Soluzioni per applicazioni speciali in condizioni ambientali estreme nello spazio, sulla terra e in mare I vostri vantaggi:
Principi di base in ambiente CAE di analisi e simulazione dei processi di stampaggio ad iniezione termoplastica
 Principi di base in ambiente CAE di analisi e simulazione dei processi di stampaggio ad iniezione termoplastica Di seguito diamo alcune indicazione di base sul come settare i parametri di controllo in
Principi di base in ambiente CAE di analisi e simulazione dei processi di stampaggio ad iniezione termoplastica Di seguito diamo alcune indicazione di base sul come settare i parametri di controllo in
Scheda tecnica online. FX3-MOC Flexi Soft CENTRALINE DI SICUREZZA
 Scheda tecnica online FX3-MOC000000 Flexi Soft A B C D E F H I J K L M N O P Q R S T Dati tecnici in dettaglio Caratteristiche Modulo Tipo di configurazione Informazioni per l'ordine Tipo Cod. art. FX3-MOC000000
Scheda tecnica online FX3-MOC000000 Flexi Soft A B C D E F H I J K L M N O P Q R S T Dati tecnici in dettaglio Caratteristiche Modulo Tipo di configurazione Informazioni per l'ordine Tipo Cod. art. FX3-MOC000000
PALLETTIZZATORI CARTESIANI SERIE PCS
 PALLETTIZZATORI CARTESIANI CON TELAIO PERIMETRALE Nel presente documento presentiamo le due serie di pallettizzatori cartesiani applicati ad un telaio di forma parallelepipeda. Queste serie di macchine
PALLETTIZZATORI CARTESIANI CON TELAIO PERIMETRALE Nel presente documento presentiamo le due serie di pallettizzatori cartesiani applicati ad un telaio di forma parallelepipeda. Queste serie di macchine
Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione lineare.
 EasyLIN package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione lineare. Pacchetto composto da : o Unità lineare o attuatore lineare o Motorizzazione
EasyLIN package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione lineare. Pacchetto composto da : o Unità lineare o attuatore lineare o Motorizzazione
Strumenti di progettazione Meccatronica. Antonio Marra
 Strumenti di progettazione Meccatronica. Antonio Marra MECCATRONICA NEOLOGISMO CONIATO DALLA JAPAN S YASKAWA ELECTRIC COMPANY NEL 1960 PER CARATTERIZZARE QUEI SISTEMI MECCANICI IN CUI LA FUNZIONALITÀ E
Strumenti di progettazione Meccatronica. Antonio Marra MECCATRONICA NEOLOGISMO CONIATO DALLA JAPAN S YASKAWA ELECTRIC COMPANY NEL 1960 PER CARATTERIZZARE QUEI SISTEMI MECCANICI IN CUI LA FUNZIONALITÀ E
COS È WI-BEEE CONTROLLO CONSUMO
 COS È WI-BEEE Wi-beee è un nuovo metodo per l acquisizione dei dati elettrici, atto a facilitare il processo decisionale nell utilizzo dell energia elettrica. Basata sul sistema brevettato DINZERO, la
COS È WI-BEEE Wi-beee è un nuovo metodo per l acquisizione dei dati elettrici, atto a facilitare il processo decisionale nell utilizzo dell energia elettrica. Basata sul sistema brevettato DINZERO, la
Casi di Successo CFD: Energie Rinnovabili e Pale ad Immersione NAFEMS 31/10/2018
 Casi di Successo CFD: Energie Rinnovabili e Pale ad Immersione NAFEMS 31/10/2018 Alcuni dati di Asotech Oggi Asotech è formata da 4 Soci con oltre 115 collaboratori 1996 anno di fondazione della Società
Casi di Successo CFD: Energie Rinnovabili e Pale ad Immersione NAFEMS 31/10/2018 Alcuni dati di Asotech Oggi Asotech è formata da 4 Soci con oltre 115 collaboratori 1996 anno di fondazione della Società
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Magazzino automatico A.A. 2017/2018 Progettazione Funzionale di Sistemi Meccanici e Meccatronici sistema di trasporto e sollevamento
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Magazzino automatico A.A. 2017/2018 Progettazione Funzionale di Sistemi Meccanici e Meccatronici sistema di trasporto e sollevamento
Simatic Live. SIRIUS-SIDOOR la nostra soluzione integrata per il settore ascensoristico
 Simatic Live SIRIUS-SIDOOR la nostra soluzione integrata per il settore ascensoristico Punti di Forza Leader di settore nel mercato ascensoristico come fornitore di sistemi di azionamento porte Piattaforma
Simatic Live SIRIUS-SIDOOR la nostra soluzione integrata per il settore ascensoristico Punti di Forza Leader di settore nel mercato ascensoristico come fornitore di sistemi di azionamento porte Piattaforma
Automazione senza sosta Digital Factory Division
 www.siemens.it/migrazione Automazione senza sosta Digital Factory Division SIMATIC S5: ULTIMA CHIAMATA Dopo quasi 40 anni di indiscussi successi il Simatic S5, la famiglia dei controllori logici programmabili
www.siemens.it/migrazione Automazione senza sosta Digital Factory Division SIMATIC S5: ULTIMA CHIAMATA Dopo quasi 40 anni di indiscussi successi il Simatic S5, la famiglia dei controllori logici programmabili
Stampante 3D Prusai3 Hephestos
 Stampante 3D Prusai3 Hephestos Il nostro progetto Il progetto consiste nell assemblaggio di una stampante 3D Prusa i3. Inoltre abbiamo stilato un manuale d uso per la stampante stessa. La ragione per cui
Stampante 3D Prusai3 Hephestos Il nostro progetto Il progetto consiste nell assemblaggio di una stampante 3D Prusa i3. Inoltre abbiamo stilato un manuale d uso per la stampante stessa. La ragione per cui
ESEMPIO PROCESSO SVILUPPO PRODOTTO E STRUMENTI
 ESEMPIO PROCESSO SVILUPPO PRODOTTO E STRUMENTI PROF. CATERINA RIZZI DIPARTIMENTO DI INGEGNERIA GESTIONALE, DELL INFORMAZIONE E DELLA PRODUZIONE CONTENUTO DELLA LEZIONE IL PROCESSO DI SVILUPPO PRODOTTO
ESEMPIO PROCESSO SVILUPPO PRODOTTO E STRUMENTI PROF. CATERINA RIZZI DIPARTIMENTO DI INGEGNERIA GESTIONALE, DELL INFORMAZIONE E DELLA PRODUZIONE CONTENUTO DELLA LEZIONE IL PROCESSO DI SVILUPPO PRODOTTO
SECONDO BIENNIO ITT Meccanica, Meccatronica e Energia
 SECONDO BIENNIO ITT Meccanica, Meccatronica e Energia MATERIA: DISEGNO E PROGETTAZIONE E ORGANIZZAZIONE INDUSTRIALE CLASSE: TERZA [ore 99(99)] e QUARTA [ore 165(99)] INDIRIZZO: ITT Meccanica, Meccatronica
SECONDO BIENNIO ITT Meccanica, Meccatronica e Energia MATERIA: DISEGNO E PROGETTAZIONE E ORGANIZZAZIONE INDUSTRIALE CLASSE: TERZA [ore 99(99)] e QUARTA [ore 165(99)] INDIRIZZO: ITT Meccanica, Meccatronica
Figura 1: Plotter cartesiano
 Modellazione, Simulazione e Controllo di un Plotter Cartesiano - Introduzione Sistemi Meccatronici II - a.a. 2017-2018 - Universita degli Studi di Bergamo Descrizione del progetto Obiettivo del progetto
Modellazione, Simulazione e Controllo di un Plotter Cartesiano - Introduzione Sistemi Meccatronici II - a.a. 2017-2018 - Universita degli Studi di Bergamo Descrizione del progetto Obiettivo del progetto
Manutenzione programmata a gestione locale o remota: sicurezza ed efficienza dei siti di produzione Mauro Cerea Siemens
 Manutenzione programmata a gestione locale o remota: sicurezza ed efficienza dei siti di produzione Mauro Cerea Siemens Gruppo HMI e Software La manutenzione Modalità di accesso remoto: Sm@rtService Diagnostica
Manutenzione programmata a gestione locale o remota: sicurezza ed efficienza dei siti di produzione Mauro Cerea Siemens Gruppo HMI e Software La manutenzione Modalità di accesso remoto: Sm@rtService Diagnostica
Esercizio 1: Data la composizione di rotazioni. Rot(i, 180)Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette:
Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette:") Esercizio 1: Data la composizione di rotazioni Rot(i, 180)Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette: 1 Rotazione di 180 intorno all asse x seguita da rotazione di 90 intorno all
Esercizio 1: Data la composizione di rotazioni Rot(i, 180)Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette: 1 Rotazione di 180 intorno all asse x seguita da rotazione di 90 intorno all
Attuatore elettrico. Novità RoHS. Profilo ribassato/basso centro di gravità. Serie LEJ. Cilindro senza stelo. Alta rigidità
 Attuatore elettrico 90 Alta rigidità LJH Cilindro senza stelo Profilo ribassato/basso centro di gravità Altezza ridotta di circa 3% (Riduzione di mm) 5 LEJS Serie Novità LEJS (Modello attuale) LJH Carico
Attuatore elettrico 90 Alta rigidità LJH Cilindro senza stelo Profilo ribassato/basso centro di gravità Altezza ridotta di circa 3% (Riduzione di mm) 5 LEJS Serie Novità LEJS (Modello attuale) LJH Carico
Fondamenti di Automatica
 Fondamenti di Automatica Prof. Giancarlo Ferrari Trecate Dipartimento di Ingegneria Industriale e dell Informazione Università degli Studi di Pavia giancarlo.ferrari@unipv.it Informazioni utili Due classi
Fondamenti di Automatica Prof. Giancarlo Ferrari Trecate Dipartimento di Ingegneria Industriale e dell Informazione Università degli Studi di Pavia giancarlo.ferrari@unipv.it Informazioni utili Due classi
Industria 4.0 Un nuovo paradigma industriale Siemens SpA 2017
 Industria 4.0 Un nuovo paradigma industriale Siemens SpA 27 Unrestricted La tecnologia ha cambiato la nostra vita Page 3 La digitalizzazione cambia tutto Page 4 Nell era di Internet si impongono nuovi
Industria 4.0 Un nuovo paradigma industriale Siemens SpA 27 Unrestricted La tecnologia ha cambiato la nostra vita Page 3 La digitalizzazione cambia tutto Page 4 Nell era di Internet si impongono nuovi
DURATA PREVISTA Ore in presenza 20 Ore a distanza Totale ore 20 Competenza. 4. Applicare le norme del disegno tecnico
 2 periodo didattico - CLASSE III a Modulo n. 1: IL DISEGNO TECNICO MECCANICO DURATA PREVISTA Ore in presenza 20 Ore a distanza Totale ore 20 1. Scegliere in autonomia gli strumenti adeguati al disegno
2 periodo didattico - CLASSE III a Modulo n. 1: IL DISEGNO TECNICO MECCANICO DURATA PREVISTA Ore in presenza 20 Ore a distanza Totale ore 20 1. Scegliere in autonomia gli strumenti adeguati al disegno
ELETTRONICA ED ELETTROTECNICA
 ELETTRONICA ED ELETTROTECNICA Profilo in uscita Il Diplomato in Elettronica ed Elettrotecnica è in grado di intervenire nella progettazione, nella costruzione e nel collaudo di sistemi elettrici ed elettronici,
ELETTRONICA ED ELETTROTECNICA Profilo in uscita Il Diplomato in Elettronica ed Elettrotecnica è in grado di intervenire nella progettazione, nella costruzione e nel collaudo di sistemi elettrici ed elettronici,
Servoazionamento Compatto - SLVD-N
 Servoazionamento Compatto - Breve panoramica Descrizione è la gamma di servoazionamenti digitali compatti per motori brushless che, oltre a funzioni di posizionatore con profilo trapezoidale, albero elettrico,
Servoazionamento Compatto - Breve panoramica Descrizione è la gamma di servoazionamenti digitali compatti per motori brushless che, oltre a funzioni di posizionatore con profilo trapezoidale, albero elettrico,
Guida lineare a rulli LRX
 Guida lineare a rulli Introduzione NUOVO! Binario di guida Giunto Lubrificatore Corpo Rulli cilindrici Giunto Gabbia Coperchio terminale Le guide lineari a rulli della serie offrono un alta affidabilità
Guida lineare a rulli Introduzione NUOVO! Binario di guida Giunto Lubrificatore Corpo Rulli cilindrici Giunto Gabbia Coperchio terminale Le guide lineari a rulli della serie offrono un alta affidabilità
Figura 1: Modello del sistema. L cos x 1 x 1 + τ ml 2. kl cos x 1 1 sin x1 x 1.
 Esercitazione Scritta di Controlli Automatici 8--8 Quesito Si consideri il sistema meccanico in figura, impiegato per effettuare test in trazione su molle lineari, ecostituitodaunbracciodimassam,chesisupponeconcentratanellasuaestremità,edilunghezzal.
Esercitazione Scritta di Controlli Automatici 8--8 Quesito Si consideri il sistema meccanico in figura, impiegato per effettuare test in trazione su molle lineari, ecostituitodaunbracciodimassam,chesisupponeconcentratanellasuaestremità,edilunghezzal.
-V- Novità. Motori passo-passo MTR-ST 2.2. Economicità delle soluzioni di azionamento. Semplice messa in funzione
 E02_02_001_E-MTR-ST Economicità delle soluzioni di azionamento Semplice messa in funzione Combinazioni adattate controller motori 2003/10 Con riserva di modifiche Prodotti 2004/2005 5/ -1 E02_02_002_F-MTR-ST
E02_02_001_E-MTR-ST Economicità delle soluzioni di azionamento Semplice messa in funzione Combinazioni adattate controller motori 2003/10 Con riserva di modifiche Prodotti 2004/2005 5/ -1 E02_02_002_F-MTR-ST
Scheda tecnica online. FX3-MOC Flexi Soft / Safe EFI-pro System CENTRALINE DI SICUREZZA / SISTEMI DI SICUREZZA
 Scheda tecnica online FX3-MOC100000 Flexi Soft / Safe EFI-pro System A B C D E F H I J K L M N O P Q R S T Dati tecnici in dettaglio Caratteristiche Modulo Tipo di configurazione Informazioni per l'ordine
Scheda tecnica online FX3-MOC100000 Flexi Soft / Safe EFI-pro System A B C D E F H I J K L M N O P Q R S T Dati tecnici in dettaglio Caratteristiche Modulo Tipo di configurazione Informazioni per l'ordine