Sistemi di produzione discreti. Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali. I sistemi manifatturieri
|
|
|
- Ruggero Basile
- 7 anni fa
- Visualizzazioni
Transcript
1 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri

2 I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e trasformazione di materie prime per l ottenimento di prodotti finiti. Tipicamente, si intende sistemi manifatturieri discreti, in cui i prodotti hanno dimensioni prefissate. Principali attività Impianti manifatturieri svolgono tipicamente: Lavorazioni Trasporto operazioni di trasformazione del prodotto prodotti, pallet, strumenti di lavoro Immagazzinamento prodotti (grezzi, semilavorati e finiti), strumenti di lavoro L automazione riguarda tutte tali attività!
, strumenti di lavoro L automazione")
3 Lavorazioni Rappresentano l attività principale per cui un impianto viene costruito Ve ne sono di tipi molto diversi, e cambiano con il cambiare della tecnologia Lavorazioni: principali ed ausiliarie Lavorazioni principali Meccaniche (con asportazione di truciolo) Per deformazione plastica laminazione, trafilatura,stampaggio Assemblaggio Disassemblaggio riciclaggio e recupero di componenti (schede elettroniche, apparecchi elettrici,...) Fusione Saldatura, colorazione, verniciatura,...

4 Lavorazioni ausiliarie Immatricolazione Controllo qualità Pulitura, lavaggio, lucidatura Etichettatura Imballaggio e confezionamento Trasporto Ogni impianto manifatturiero è dotato di sistemi di trasporto (automatico o manuale) dei prodotti: dal magazzino dei prodotti grezzi al primo centro di lavoro da un centro di lavoro al successivo dall ultimo centro di lavoro al magazzino dei prodotti finiti

5 Trasporto Mezzi di trasporto automatico dei prodotti: nastri e rulliere ascensori carrelli a guida automatica su binari o piste magnetiche manipolatori robotici fissi o mobili carri-ponte Trasporto All interno dell impianto vengono anche movimentati: pallet (vassoi che portano il prodotto) tipicamente, ricircolano nell impianto utensili dal magazzino degli utensili alla macchina da una macchina ad un altra (utensili condivisi)

6 Immagazzinamento Magazzini servono per: accumulo prodotti grezzi/finiti/semilavorati accumulo pallet accumulo utensili code in ingresso ad una macchina operatrice per assorbire diverse velocità di lavorazione Esempio: sistema manifatturiero con due centri di lavoro

7 I sistemi di trasporto I sistemi di trasporto Nel presente modulo vediamo i dispositivi usati per la movimentazione dei prodotti che sono tra i più comuni negli impianti di produzione automatizzati. Scopo: imparare a comprendere le dinamiche principali, la tecnologia di base, e gli eventuali vincoli imposti al progetto dell automazione.

8 Il pallet Dispositivo (vassoio) che porta il prodotto Forma: dipende dal prodotto trasportato! Materiale: Legno/Metallo/Plastica Dispositivi di bloccaggio prodotto: presenti, se il pallet entra in macchina per lavorazione assenti, se fa solo trasporto Con informazioni sul tipo di prodotto memorizzate su pastiglie magnetiche Esempio di pallet

9 I principali dispositivi Nastri e rulli Sensori di presenza Il blocco Il singolarizzatore Il sollevatore Catene e rulliere Vista dall'alto pallet Catene di trasporto Asse della linea Vista dall'alto Asse della linea

10 Contatti (switch): Magnetici Sensori di presenza Occorre assicurarsi che il prodotti tocchi sempre il sensore Non c è contatto con il prodotto, ma devo sapere a quale distanza massima il prodotto si troverà rispetto al sensore e sono più lenti (fenomeni magnetici) A traguardo Ottici Non c è contatto e il prodotto può essere di forme anche molto diverse fotocellule, fotodiodi, fototransistori, telecamere Blocco pallet Se la linea di lavorazione ha molte stazioni di lavoro che non caricano il prodotto, ma lo lasciano sul sistema di trasporto, ho necessità di allineare contamporaneamente più prodotti e stazioni. Non potendo fermare la linea, posso bloccare i pallet.

11 pallet Blocco pallet blocco Vista laterale Asse della linea catena di trasporto pallet blocco Asse della linea catena di trasporto Singolarizzatore In alcuni punti della linea, è opportuno formare un accumulo di pallet (coda), per disaccoppiare parti di impianto con velocità di lavorazione diverse E quindi necessario, a valle della coda, separare i pallet per permetterne la lavorazione o il trasporto individuale

12 Singolarizzatore Asse della linea Singolarizzatore Asse della linea Vista laterale Sollevatore Pallet Vista laterale Catene di trasporto Sollevatore

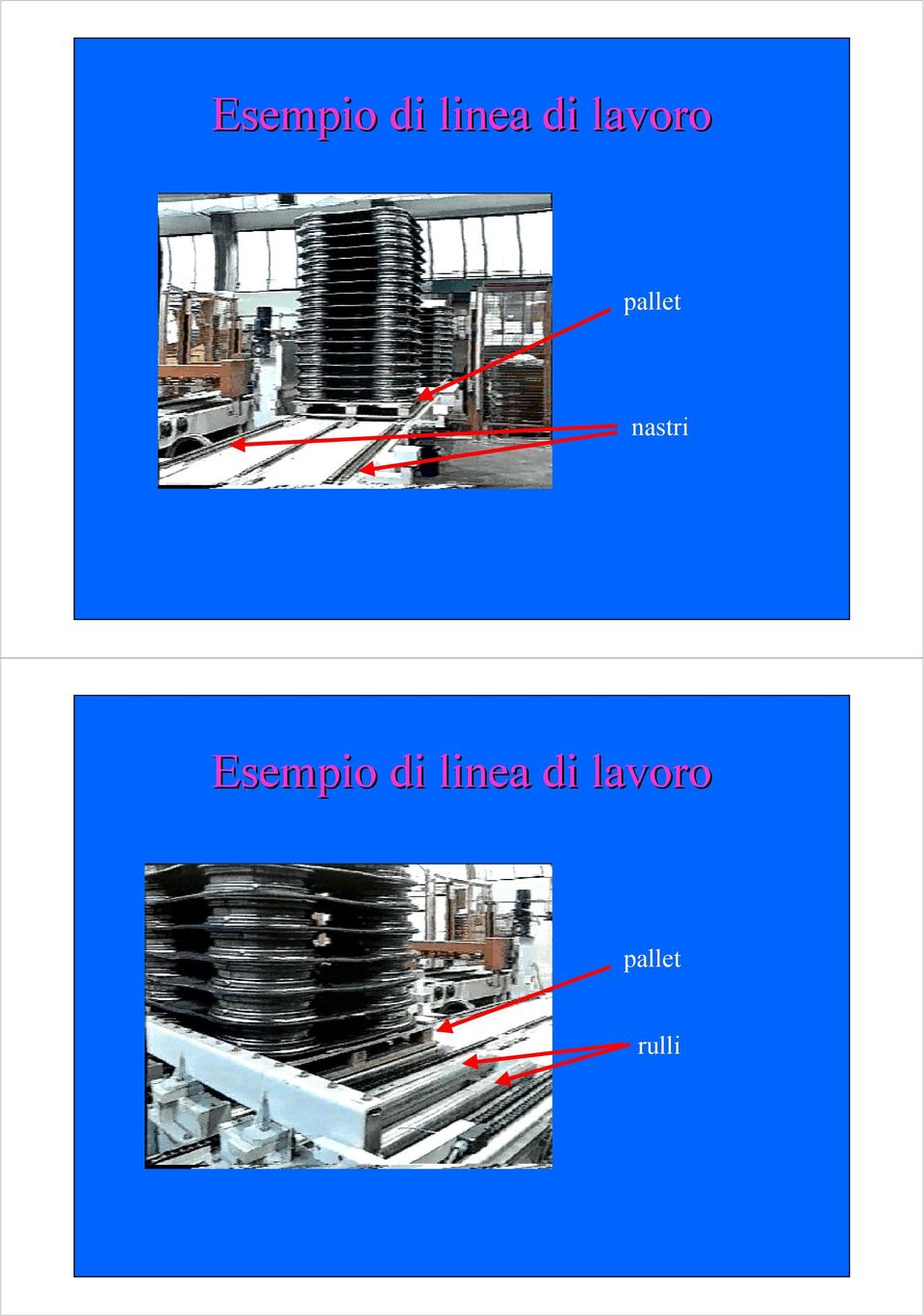
13 Esempio di linea di lavoro pallet nastri Esempio di linea di lavoro pallet rulli
14 Sistemi di movimentazione Sistemi di movimentazione Permettono l esecuzione di movimenti complessi come la rotazione o la traslazione di un pallet, anche in presenza di bivi o di convergenze

15 Girola Vista dall'alto Sensori Catene girola Catene di trasporto Traslatore Vista dall'alto Sensore Vista laterale Catene traslatore Catene di trasporto Catene traslatore Catene di trasporto Posizione bassa Posizione alta

16 Ascensore Sensori piano rialzato Ascensore singolo Catene ascensore piano terra Ascensore condiviso Vista dall'alto Vista laterale Ascensore Sensori Ascensore singolo Catene ascensore piano rialzato piano terra Ascensore condiviso Vista dall'alto Vista laterale

17 Ascensore Sensori piano rialzato Ascensore condiviso Ascensore singolo Catene ascensore piano terra Vista dall'alto Vista laterale Il centratore Vista dall'alto Vista laterale prima del centraggio

18 Il centratore Vista dall'alto Vista laterale al termine del centraggio Convergenza Vista dall'alto Sensori Catene di trasporto

19 Divergenza Vista dall'alto Sensori Catene di trasporto Girola doppia per divergenza Vista dall'alto Sensori Sensori Catene di trasporto

20 Esempio di linea di lavoro Il robot industriale

21 Il robot industriale Sistema la cui struttura meccanica è costituita da sequenze di elementi meccanici rigidi (bracci), connessi da giunti, per permetterne il moto relativo. I giunti sono rotatori (movimento relativo rotatorio) o prismatici (movimento relativo traslatorio) Il robot industriale Inoltre, è costituito da: attuatori, per imprimere movimento elettrici, idraulici, pneumatici sensori, per rilevare lo stato del robot o dell ambiente esterno unità di governo, per impostare (programmare) e controllare i movimenti e permetterne la ripetibilità
22 I principali utilizzi Trasporto e manipolazione (il prodotto non cambia le proprie caratteristiche fisiche) palletizzazione e depalletizzazione carico e scarico di macchine e magazzini confezionamento Assemblaggio (il prodotto perde identità) I principali utilizzi Lavorazione (il prodotto cambia le proprie caratteristiche fisiche, e il robot manipola utensili) verniciatura saldatura taglio laser o con getti di acqua Misura collaudo dimensionale rilevamento di profili
23 Gradi libertà I gradi di libertà di un corpo rigido nello spazio sono 6, corrispondenti ad altrettante possibilità di movimento (3 traslazioni e 3 rotazioni) I gradi di libertà di un robot sono pari al numero dei giunti della sua struttura coincidono con il numero di parametri necessari per definire la posizione assunta Gradi libertà Un robot a 7 gradi di libertà è ridondante, ma tipicamente nel conto vengono incluse l apertura/chiusura delle pinze e lo spostamento della base mobile. Tuttavia, non accade mai che base e pinze non vengono utilizzate in contemporanea con gli altri assi, e non servono a definire la posizione della struttura.
24 La struttura meccanica Struttura portante polso si occupa di posizionare un oggetto nello spazio si realizza con giunti rotatori o prismatici si occupa di orientare un oggetto nello spazio si realizza solo con giunti rotatori organo terminale esegue la lavorazione tipica del robot La struttura portante I movimenti della struttura portante definiscono lo spazio di lavoro bastano 3 giunti (giunti principali)! A seconda della tipologia dei suoi giunti principali si possono classificare i robot industriali in 5 tipi fondamentali (di seguito indicati a partire dalla base; P=giunto Prismatico; R=giunto Rotatorio)
25 Classificazione dei robot Cartesiano: PPP (3 giunti prismatici) Classificazione dei robot Cilindrico: PRP lo spazio di lavoro è un cilindro Sferico: RRP assi di rotazione perpendicolari lo spazio di lavoro è una sfera Scara: RRP gli assi moto sono paralleli scara
26 Classificazione dei robot Antropomorfi (RRR) asse di rotazione del giunto di base ortogonale agli altri due, paralleli tra loro Il controllo Pianificazione della traiettoria: generazione delle leggi di moto delle variabili di posizione dei giunti, a partire da una descrizione sintetica del moto desiderato. Controllo di moto: determinazione delle forze e coppie ai giunti necessarie per l esecuzione delle traiettorie scelte
27 L automazione Organizzazione delle funzioni svolte dal robot (architettura funzionale) e loro coordinamento con quelle di altri dispositivi L architettura funzionale prevede tipicamente 3 livelli gerarchici: azioni (apri pinza, vai alla posizione X) compiti (afferra, rilascia, spostati) missione (deposita oggetto nell armadio) Problematiche di automazione Definizione dei compiti del robot Coordinamento con altri componenti di impianto (macchine operatrici) Cooperazione con altri robot passamano di prodotti lavorazioni a più robot
28 Esempio di manipolatori Esempio di manipolatori
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri Lez. 2 - Sistemi manifatturieri 1 I sistemi manifatturieri I sistemi
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri Lez. 2 - Sistemi manifatturieri 1 I sistemi manifatturieri I sistemi
Processi e impianti industriali
 industriali 1 Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
industriali 1 Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
Processi e impianti. Processi e impianti industriali
 Processi e impianti industriali 1 Processo industriale: Processi e impianti combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime,
Processi e impianti industriali 1 Processo industriale: Processi e impianti combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime,
Processi e impianti. industriali. Processi e impianti. Processi e impianti. Processi e impianti. Processo industriale:
 industriali Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
industriali Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
I.I.S.S. G. Marconi Bari. Istituto Tecnico settore Tecnologico :: Liceo Scientifico opzione Scienze applicate. Il Robot a scuola
 Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
ITS MAKER Modulo industrializzazione di prodotto. Modena, febbraio 2017
 ITS MAKER Modulo industrializzazione di prodotto Modena, febbraio 2017 Design for assembly-caratteristiche I prodotti sono progettati in generale seguendo 6 particolari criteri Minimo costo. I singoli
ITS MAKER Modulo industrializzazione di prodotto Modena, febbraio 2017 Design for assembly-caratteristiche I prodotti sono progettati in generale seguendo 6 particolari criteri Minimo costo. I singoli
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Lezione 2: I problemi fondamentali. Per capire meglio i problemi
 Robotica Industriale Lezione 2: I problemi fondamentali Per capire meglio i problemi Diamo un occhiata a cosa si fa con i robot industriali Cerchiamo di capire quali siano le esigenze del lavoro che devono
Robotica Industriale Lezione 2: I problemi fondamentali Per capire meglio i problemi Diamo un occhiata a cosa si fa con i robot industriali Cerchiamo di capire quali siano le esigenze del lavoro che devono
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot. Introduzione al corso. Prof. Paolo Rocco
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
Rappresentazioni in 3D. Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati
 Rappresentazioni in 3D Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto scalare, prodotto
Rappresentazioni in 3D Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto scalare, prodotto
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Università. Università. Cassino. Cassino. Università. Università. Cassino. Cassino. Università. Università. Cassino. Cassino.
 assemblaggio 1. 2. 3. Assemblaggio manuale 4. 5. Pianificazione dei processi robotizzati di Pianificazione dei processi robotizzati di degli assemblaggio studi 6. Design for for Assembly M. Strano, L assemblaggio,
assemblaggio 1. 2. 3. Assemblaggio manuale 4. 5. Pianificazione dei processi robotizzati di Pianificazione dei processi robotizzati di degli assemblaggio studi 6. Design for for Assembly M. Strano, L assemblaggio,
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica
 PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
ROBOTICA INDUSTRIALE PRIMO PERCORSO
 ROBOTICA INDUSTRIALE PRIMO PERCORSO ROB1 Manutenzione installazione programmazione dell interfacciamento di sistemi industriali robotizzati Prerequisiti Per accedere è richiesto un diploma d istituto tecnico
ROBOTICA INDUSTRIALE PRIMO PERCORSO ROB1 Manutenzione installazione programmazione dell interfacciamento di sistemi industriali robotizzati Prerequisiti Per accedere è richiesto un diploma d istituto tecnico
MACCHINE E IMPIANTI AD ALTA TECNOLOGIA PER LA VERNICIATURA INDUSTRIALE DI QUALITÀ
 MACCHINE E IMPIANTI AD ALTA TECNOLOGIA PER LA VERNICIATURA INDUSTRIALE DI QUALITÀ MEC SERVICE È PARTE DEL GRUPPO LAEB, COSTRUITO INTORNO A LAEB SRL, SOCIETÀ OPERANTE DAL 1988 NEL CAMPO DELL AUTOMAZIONE
MACCHINE E IMPIANTI AD ALTA TECNOLOGIA PER LA VERNICIATURA INDUSTRIALE DI QUALITÀ MEC SERVICE È PARTE DEL GRUPPO LAEB, COSTRUITO INTORNO A LAEB SRL, SOCIETÀ OPERANTE DAL 1988 NEL CAMPO DELL AUTOMAZIONE
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
A P I E L AUTOMAZIONI PER L INDUSTRIA E LA LOGISTICA MAGAZZINI AUTOMATICI. La soluzione automatizzata
 La soluzione automatizzata 1 La soluzione automatizzata APIEL realizza automazione per l industria, la logistica, ed asservimenti per macchine utensili. Sono disponibili sistemi standard oppure possono
La soluzione automatizzata 1 La soluzione automatizzata APIEL realizza automazione per l industria, la logistica, ed asservimenti per macchine utensili. Sono disponibili sistemi standard oppure possono
DAL Macchine e impianti per la lavorazione della lamiera.
 PRESSE PIEGATRICI DAL 1973 Macchine e impianti per la lavorazione della lamiera. VIMERCATI LA QUALITÁ MADE IN ITALY La società F.lli Vimercati s.n.c. è nata nel 1973 nel tessuto imprenditoriale della
PRESSE PIEGATRICI DAL 1973 Macchine e impianti per la lavorazione della lamiera. VIMERCATI LA QUALITÁ MADE IN ITALY La società F.lli Vimercati s.n.c. è nata nel 1973 nel tessuto imprenditoriale della
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
OPPORTUNITA Macchine utensili per la lavorazione delle superfici Macchine per la movimentazione industriale, logistica, AGV, magazzini ecc.
 La legge di bilancio n232 del 11 Dicembre 2016 ha confermato l ammortamento al 140% per i beni strumentali e ha introdotto il super-ammortamento al 250% per gli interventi nell ambito dell automazione
La legge di bilancio n232 del 11 Dicembre 2016 ha confermato l ammortamento al 140% per i beni strumentali e ha introdotto il super-ammortamento al 250% per gli interventi nell ambito dell automazione
IMPEX TECNICHE LINEARI SRL 05/16.
 I prodotti MOVITEC trovano impiego in moltissime applicazioni industriali e la struttura aziendale è in grado di soddisfare le moltissime richieste dei clienti. Automotive Imballaggi Manipolazione Taglio
I prodotti MOVITEC trovano impiego in moltissime applicazioni industriali e la struttura aziendale è in grado di soddisfare le moltissime richieste dei clienti. Automotive Imballaggi Manipolazione Taglio
AUTOMAZIONE INDUSTRIALE. Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari
 AUTOMAZIONE INDUSTRIALE Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari Contenuti - I sistemi di produzione - Alcuni cenni storici - La produzione di tipo discreto
AUTOMAZIONE INDUSTRIALE Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari Contenuti - I sistemi di produzione - Alcuni cenni storici - La produzione di tipo discreto
Rappresentazioni in 3D. Vettori: rappresentano punti e/o segmenti orientati
 Rappresentazioni in 3D Leggere Cap. 2 del libro di testo Sistemi di riferimento Caratterizzano i corpi rigidi Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto
Rappresentazioni in 3D Leggere Cap. 2 del libro di testo Sistemi di riferimento Caratterizzano i corpi rigidi Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto
Per macchina utensile (esempio 1, esempio 2) si intende una macchina operatrice con la quale è possibile eseguire su un pezzo (barra, sbozzato,
 si intende una macchina operatrice con la quale è possibile eseguire su un pezzo (barra, sbozzato,") Macchine utensili Definizione Per macchina utensile (esempio 1, esempio 2) si intende una macchina operatrice con la quale è possibile eseguire su un pezzo (barra, sbozzato, getto, ), metallico o no, alcune
Macchine utensili Definizione Per macchina utensile (esempio 1, esempio 2) si intende una macchina operatrice con la quale è possibile eseguire su un pezzo (barra, sbozzato, getto, ), metallico o no, alcune
ROBOTIC. simactech.com. Tecnologia al servizio dell industria.
 ROBOTIC simactech.com Tecnologia al servizio dell industria. INDICE Asservimento Centri di Lavoro Asservimento Macchine Utensili Paletizzazione Movimentazione LGV Speciali Confezionamento Sistemi di Trasporto
ROBOTIC simactech.com Tecnologia al servizio dell industria. INDICE Asservimento Centri di Lavoro Asservimento Macchine Utensili Paletizzazione Movimentazione LGV Speciali Confezionamento Sistemi di Trasporto
TECNOLOGIA MECCANICA
 TECNOLOGIA MECCANICA Ing. Produzione Industriale - Tecnologia Meccanica - Introduzione al corso - 1 TECNOLOGIE DI PRODUZIONE La tecnologia meccanica ha a che fare con il mondo del produrre. L insegnamento
TECNOLOGIA MECCANICA Ing. Produzione Industriale - Tecnologia Meccanica - Introduzione al corso - 1 TECNOLOGIE DI PRODUZIONE La tecnologia meccanica ha a che fare con il mondo del produrre. L insegnamento
Controllo dei Robot. Corso di Controllo dei Robot Introduzione. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Corso di Controllo dei Robot Introduzione Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Introduzione - La robotica La robotica è un settore relativamente giovane della tecnologia
Corso di Controllo dei Robot Introduzione Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Introduzione - La robotica La robotica è un settore relativamente giovane della tecnologia
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo dei Robot. Corso di Controllo dei Robot Introduzione. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Corso di Introduzione Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Introduzione - La robotica La robotica è un settore relativamente giovane della tecnologia moderna che supera i
Corso di Introduzione Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Introduzione - La robotica La robotica è un settore relativamente giovane della tecnologia moderna che supera i
Lezione 2: Applicazioni di robot industriali e. problemi
 Robotica Robot Industriali e di Servizio Lezione 2: Applicazioni di robot industriali e Comunicazione: Lezione del mercoledì spostata alle 12:00 (puntuali!) in aula B19. Intervalli ridotti (L!!) 2 1 Per
Robotica Robot Industriali e di Servizio Lezione 2: Applicazioni di robot industriali e Comunicazione: Lezione del mercoledì spostata alle 12:00 (puntuali!) in aula B19. Intervalli ridotti (L!!) 2 1 Per
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
Il centro di lavoro. Lez. 3 - Centri di lavorazione meccanica 2. Macchina utensile. Il centro di lavoro. Il centro di lavoro è una macchina utensile
 Centri di lavorazione meccanica Il centro di lavoro Gli elementi secondari Gli utensili Il mandrino Il centro di lavoro Lez. 3 - Centri di lavorazione meccanica 1 Il centro di lavoro Il centro di lavoro
Centri di lavorazione meccanica Il centro di lavoro Gli elementi secondari Gli utensili Il mandrino Il centro di lavoro Lez. 3 - Centri di lavorazione meccanica 1 Il centro di lavoro Il centro di lavoro
Compito d esame 14/11/2005
 COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
Automazione Industriale
 Politecnico di Milano Prof. Luca Ferrarini Tel. 02-2399-3672 e-mail luca.ferrarini@polimi.it http://www.elet.polimi.it/upload/ferrarin/ miai2004/corso.html 1 Docente LUCA FERRARINI Dipartimento di Elettronica
Politecnico di Milano Prof. Luca Ferrarini Tel. 02-2399-3672 e-mail luca.ferrarini@polimi.it http://www.elet.polimi.it/upload/ferrarin/ miai2004/corso.html 1 Docente LUCA FERRARINI Dipartimento di Elettronica
ATTREZZATURE E SISTEMI PRESA PEZZO PER LAVORAZIONI SU MACCHINE UTENSILI
 ATTREZZATURE E SISTEMI PRESA PEZZO PER LAVORAZIONI SU MACCHINE UTENSILI - Basi interfaccia macchina / attrezzo - Attrezzi di tornitura - Attrezzi di dentatura - Attrezzi di rettifica - Attrezzi speciali
ATTREZZATURE E SISTEMI PRESA PEZZO PER LAVORAZIONI SU MACCHINE UTENSILI - Basi interfaccia macchina / attrezzo - Attrezzi di tornitura - Attrezzi di dentatura - Attrezzi di rettifica - Attrezzi speciali
I PARTE Domande a risposta multipla
 10/02/2012 MATRICOLA I PARTE Domande a risposta multipla La valutazione di ogni domanda sarà fatta assegnando alle risposte esatte i punteggi indicati. La valutazione finale sarà in trentesimi è farà media
10/02/2012 MATRICOLA I PARTE Domande a risposta multipla La valutazione di ogni domanda sarà fatta assegnando alle risposte esatte i punteggi indicati. La valutazione finale sarà in trentesimi è farà media
LE LAVORAZIONI INDUSTRIALI
 LE LAVORAZIONI INDUSTRIALI Tornitura Foratura Fresatura Rettifica Altre lavorazioni 1 LAVORAZIONI INDUSTRIALI Nelle lavorazioni industriali per asportazione di truciolo sono sempre presenti: Pezzo Grezzo
LE LAVORAZIONI INDUSTRIALI Tornitura Foratura Fresatura Rettifica Altre lavorazioni 1 LAVORAZIONI INDUSTRIALI Nelle lavorazioni industriali per asportazione di truciolo sono sempre presenti: Pezzo Grezzo
Robot Industriali MT
 Robot Industriali I Robot Il termine robot deriva dal termine ceco robota, che significa "lavoro pesante" o "lavoro forzato". L'introduzione o di questo termine e si deve allo scrittore ceco Karel Čapek,
Robot Industriali I Robot Il termine robot deriva dal termine ceco robota, che significa "lavoro pesante" o "lavoro forzato". L'introduzione o di questo termine e si deve allo scrittore ceco Karel Čapek,
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Linea Confezionamento 4dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Sistema di confezionamento
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Linea Confezionamento 4dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Sistema di confezionamento
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
PALLETTIZZAZATORI E FINE LINEA
 PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
UNITÀ DI GOVERNO. Architettura funzionale. Ambiente di programmazione. Architettura hardware
 UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
Luigi Piroddi
 Automazione industriale dispense del corso 3. Processi, impianti e controllo Luigi Piroddi piroddi@elet.polimi.it Introduzione Un sistema automatizzato comprende essenzialmente due elementi: un processo
Automazione industriale dispense del corso 3. Processi, impianti e controllo Luigi Piroddi piroddi@elet.polimi.it Introduzione Un sistema automatizzato comprende essenzialmente due elementi: un processo
METTIFALDA A COLONNA
 PALLETTIZZAZIONE METTIFALDA Solaut produce posizionatori di interfalde per singola baia di pallettizzazione oppure sistemi che posizionano l interfalda, prelevata da un unico magazzino, su più stazioni
PALLETTIZZAZIONE METTIFALDA Solaut produce posizionatori di interfalde per singola baia di pallettizzazione oppure sistemi che posizionano l interfalda, prelevata da un unico magazzino, su più stazioni
Processi per asportazione C.N. Processi per asportazione C.N. Generalità sui parametri di taglio. La tornitura Foratura, fresatura e rettifica
 Processi per asportazione C.N. Processi per asportazione C.N. Generalità sui parametri di taglio La tornitura Foratura, fresatura e rettifica Ottimizzazione del processo 2 2006 Politecnico di Torino 1
Processi per asportazione C.N. Processi per asportazione C.N. Generalità sui parametri di taglio La tornitura Foratura, fresatura e rettifica Ottimizzazione del processo 2 2006 Politecnico di Torino 1
FOMIR. Linee di montaggio M-System
 FOMIR FOMIR srl Via Torricelli, 237 I-40059 Fossatone di Medicina (BO) T+39 051 782444 / Fax +39 051 6960514 fomir.it easysae.it Linee di montaggio M-System Linee di montaggio M-System Realizzare delle
FOMIR FOMIR srl Via Torricelli, 237 I-40059 Fossatone di Medicina (BO) T+39 051 782444 / Fax +39 051 6960514 fomir.it easysae.it Linee di montaggio M-System Linee di montaggio M-System Realizzare delle
Gradi di libertà e vincoli. Moti del corpo libero
 Gradi di libertà e vincoli Moti del corpo libero Punto materiale Il punto materiale descrive un corpo di cui interessa individuare solo la sua posizione Nel piano la posizione di un punto si individua
Gradi di libertà e vincoli Moti del corpo libero Punto materiale Il punto materiale descrive un corpo di cui interessa individuare solo la sua posizione Nel piano la posizione di un punto si individua
 R i c e r c a e d A u t o m a z i o n e I n d u s t r i a l e www.mtltecnosistemi.it Passione e IMPEGNO MTL Tecnosistemi, pur essendo un azienda di nuova generazione, è ben affermata all interno del mercato
R i c e r c a e d A u t o m a z i o n e I n d u s t r i a l e www.mtltecnosistemi.it Passione e IMPEGNO MTL Tecnosistemi, pur essendo un azienda di nuova generazione, è ben affermata all interno del mercato
KipAPPL.pdf Edizione 12-00. ➀ = ULS 160, ➁ = RCH, ➂ = Pinza RP 17
 KipAPPL.pdf Edizione 12-00 CARICO E SCARICO DI PEZZI FUSI DI OTTONE Diversi pezzi fusi di ottone vengono caricati e scaricati dalle macchine utensili e quindi disposti su pallet. Diversi tipi di pezzi
KipAPPL.pdf Edizione 12-00 CARICO E SCARICO DI PEZZI FUSI DI OTTONE Diversi pezzi fusi di ottone vengono caricati e scaricati dalle macchine utensili e quindi disposti su pallet. Diversi tipi di pezzi
Controllo dei Robot. Corso di Controllo dei Robot Unità di Governo. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Corso di Controllo dei Robot Unità di Governo Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Componenti di un sistema robotico Un sistema robotico è un sistema complesso rappresentato
Corso di Controllo dei Robot Unità di Governo Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Componenti di un sistema robotico Un sistema robotico è un sistema complesso rappresentato
REFERENTE DEL PROGETTO (CODICE N6E)
") 0 REFERENTE DEL PROGETTO (CODICE N6E) Giovanna Marchiol Tel 0514199718 - Email g.marchiol@bo.cna.it INDICE ZIONE ISO.1 DISEGNO TECNICO MECCANICO 2 METROLOGIA E SISTEMI DI COLLAUDO...3 CARATTERISTICHE TECNOLOGICHE
0 REFERENTE DEL PROGETTO (CODICE N6E) Giovanna Marchiol Tel 0514199718 - Email g.marchiol@bo.cna.it INDICE ZIONE ISO.1 DISEGNO TECNICO MECCANICO 2 METROLOGIA E SISTEMI DI COLLAUDO...3 CARATTERISTICHE TECNOLOGICHE
CATALOGO MECCANICA 2019/2020
 CATALOGO MECCANICA 2019/2020 INDICE ZIONE ISO.1 DISEGNO TECNICO MECCANICO 2 METROLOGIA E SISTEMI DI COLLAUDO...3 CARATTERISTICHE TECNOLOGICHE DEI MATERIALI PER LA MECCANICA 4 REFERENTE DEL PROGETTO (COD.
CATALOGO MECCANICA 2019/2020 INDICE ZIONE ISO.1 DISEGNO TECNICO MECCANICO 2 METROLOGIA E SISTEMI DI COLLAUDO...3 CARATTERISTICHE TECNOLOGICHE DEI MATERIALI PER LA MECCANICA 4 REFERENTE DEL PROGETTO (COD.
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 10 Macchine utensili e controllo numerico Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 10 Macchine utensili e controllo numerico Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Introduzione
Lezione 4: Il movimento
 Robotica Robot Industriali e di Servizio Lezione 4: Il movimento Esigenze di controllo: tre casi diversi È importante solo la posizione finale Quasi mai, ma talvolta la struttura ci può aiutare (pick and
Robotica Robot Industriali e di Servizio Lezione 4: Il movimento Esigenze di controllo: tre casi diversi È importante solo la posizione finale Quasi mai, ma talvolta la struttura ci può aiutare (pick and
università DEGLI STUDI DI NAPOLI FEDERICO II
 università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
Caratteristiche generali degli F.M.S.
 Caratteristiche generali degli F.M.S. 1 Definizione di F.M.S. Flexible Manufacturing System (sistema flessibile di lavorazione) F.M.S. è un gruppo di M.U. automatizzate collegate da un sistema automatico
Caratteristiche generali degli F.M.S. 1 Definizione di F.M.S. Flexible Manufacturing System (sistema flessibile di lavorazione) F.M.S. è un gruppo di M.U. automatizzate collegate da un sistema automatico
La colorazione standar della macchina è giallo RAL 1007 (NCS S1080-Y20R) e parti brunite nere.
 e parti brunite nere.") I bracci telescopici sono stati progettati e costruiti per essere installati su vie di corsa, per muoversi all interno di un area di lavoro, per annullare gli effetti generati dalla coppia di reazione
I bracci telescopici sono stati progettati e costruiti per essere installati su vie di corsa, per muoversi all interno di un area di lavoro, per annullare gli effetti generati dalla coppia di reazione
Università. Università. Cassino. Università. Università. Cassino. Cassino. degli studi di. degli studi di. degli studi di
 Produzione Robotizzata e Flessibile A.A. 2004-2005 Docente: ing. MATTEO studi STRANO di m.strano@unicas.it INTRODUZIONE ALLE TECNOLOGIE DI PRODUZIONE La produzione Di processo studi di Per parti La soluzione
Produzione Robotizzata e Flessibile A.A. 2004-2005 Docente: ing. MATTEO studi STRANO di m.strano@unicas.it INTRODUZIONE ALLE TECNOLOGIE DI PRODUZIONE La produzione Di processo studi di Per parti La soluzione
Cinematica. La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane
 Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Università degli Studi di Cassino Facoltà di Ingegneria
 Facoltà di Ingegneria Corso di Laurea in Modulo di: prof. Giuseppe Tomasso e-mail: tomasso@unicas.it telefono: 0776-2993730 Web: http:// webuser.unicas.it/tomasso Introduzione Modulo di: programma Corso
Facoltà di Ingegneria Corso di Laurea in Modulo di: prof. Giuseppe Tomasso e-mail: tomasso@unicas.it telefono: 0776-2993730 Web: http:// webuser.unicas.it/tomasso Introduzione Modulo di: programma Corso
Università degli Studi di Lecce Facoltà di Ingegneria Informatica
 Università degli Studi di Lecce Facoltà di Ingegneria Informatica TESI DI LAUREA: Sistema integrato di manipolazione e visione per il fissaggio di protesi ortopediche. Laureando: Angelo di Noi Relatori:
Università degli Studi di Lecce Facoltà di Ingegneria Informatica TESI DI LAUREA: Sistema integrato di manipolazione e visione per il fissaggio di protesi ortopediche. Laureando: Angelo di Noi Relatori:
Quotatura. Prof. Giorgio Colombo Dipartimento di Meccanica III FACOLTA DI ARCHITETTURA DISEGNO INDUSTRIALE POLITECNICO DI MILANO 1
 Knowledge Aided Engineering Manufacturing and Related Technologies DISEGNO TECNICO INDUSTRIALE Quotatura Prof. Giorgio Colombo Dipartimento di Meccanica POLITECNICO DI MILANO 1... nella precedente lezione
Knowledge Aided Engineering Manufacturing and Related Technologies DISEGNO TECNICO INDUSTRIALE Quotatura Prof. Giorgio Colombo Dipartimento di Meccanica POLITECNICO DI MILANO 1... nella precedente lezione
SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI
 SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI LA FORZA DELLE IDEE NELL AUTOMAZIONE SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI La nostra esperienza decennale nel recepire
SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI LA FORZA DELLE IDEE NELL AUTOMAZIONE SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI La nostra esperienza decennale nel recepire
Automazioni su misura in formato 4.0
 Automazioni su misura in formato 4.0 La Nostra Azienda La ditta A.I.M.E. S.r.l. nasce a Modena nel 1981 e si occupa di Automazioni Industriali, Meccaniche ed Elettriche. Sulla base di una grande esperienza
Automazioni su misura in formato 4.0 La Nostra Azienda La ditta A.I.M.E. S.r.l. nasce a Modena nel 1981 e si occupa di Automazioni Industriali, Meccaniche ed Elettriche. Sulla base di una grande esperienza
Processi industriali. Alessandro De Luca. Automazione
 Processi industriali Alessandro De Luca Sistema di produzione automatizzato Un sistema di produzione automatizzato è composto da! un processo produttivo (di natura industriale)! combinazione di operazioni
Processi industriali Alessandro De Luca Sistema di produzione automatizzato Un sistema di produzione automatizzato è composto da! un processo produttivo (di natura industriale)! combinazione di operazioni
Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo tra di loro;
 (pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
(pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
3.6.3 Esercizio Esercizio... 85
 Indice 1 Movimenti rigidi 1 1.1 Trasformazioni nello spazio R 3.................. 1 1.2 Trasformazioni rigide........................ 2 1.2.1 Espressione generale di una trasformazione rigida.... 3 1.2.2
Indice 1 Movimenti rigidi 1 1.1 Trasformazioni nello spazio R 3.................. 1 1.2 Trasformazioni rigide........................ 2 1.2.1 Espressione generale di una trasformazione rigida.... 3 1.2.2
ò à MACCHINA MOD. ML
 òà ------------------------------------------ MACCHINA MOD. ML-6200-200 ADATTA PER LA PALLETTIZZAZIONE DI LAMINATI DI ACCIAIO INOX CON FUNZIONAMENTO AUTOMATICO E MANUALE. PROGETTO REALIZZAZIONE DESCRIZIONE
òà ------------------------------------------ MACCHINA MOD. ML-6200-200 ADATTA PER LA PALLETTIZZAZIONE DI LAMINATI DI ACCIAIO INOX CON FUNZIONAMENTO AUTOMATICO E MANUALE. PROGETTO REALIZZAZIONE DESCRIZIONE
ROBOT SCARA PESANTE ROBOT
 ROBOT SCARA Apiel realizza due modelli di robot SCARA che trovano la loro applicazione principale per la realizzazione di isole di pallettizzazione. I due modelli si differenziano per la portata al polso
ROBOT SCARA Apiel realizza due modelli di robot SCARA che trovano la loro applicazione principale per la realizzazione di isole di pallettizzazione. I due modelli si differenziano per la portata al polso
PROFILO Organizzazione: Metodologia: Tecnologie: Attività e prodotti: BaggioGroup srl Div. ADD
 PROFILO Organizzazione: l organizzazione copre diverse aree di competenza per realizzare forniture e servizi nel settore della automazione e della logistica. Metodologia: per i progetti più articolati,
PROFILO Organizzazione: l organizzazione copre diverse aree di competenza per realizzare forniture e servizi nel settore della automazione e della logistica. Metodologia: per i progetti più articolati,
MATERIALE COMPOSITO FIBRE DI CARBONIO. Cosa significa? Cos è? RESINA EPOSSIDICA. - Il rinforzo. - La caratteristica meccanica.
 FIBRE DI CARBONIO - Il rinforzo. - La caratteristica meccanica. Cos è? MATERIALE COMPOSITO Cosa significa? RESINA EPOSSIDICA - La matrice. - Il mezzo che circonda le fibre di carbonio e conferisce resistenza
FIBRE DI CARBONIO - Il rinforzo. - La caratteristica meccanica. Cos è? MATERIALE COMPOSITO Cosa significa? RESINA EPOSSIDICA - La matrice. - Il mezzo che circonda le fibre di carbonio e conferisce resistenza
F. L. T. E L E T T R O N O N I C A ROCCHENERE (ME) TEL / FAX E mail :
 TEL / FAX E mail :") IMPIANTI e SOLUZIONI COMPLETE per la MOVIMENTAZIONE e L IMBALLAGGIO La ricerca e lo sviluppo di macchine e sistemi, ci consente di realizzare un prodotto caratterizzato da un rapporto decisamente competitivo
IMPIANTI e SOLUZIONI COMPLETE per la MOVIMENTAZIONE e L IMBALLAGGIO La ricerca e lo sviluppo di macchine e sistemi, ci consente di realizzare un prodotto caratterizzato da un rapporto decisamente competitivo
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 28 giugno 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 28 giugno 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie
Capitolo 2. Statica del corpo rigido. 2.1 Azioni su un corpo rigido
 Capitolo 2 Statica del corpo rigido La statica è la parte della meccanica che si occupa dello studio dell equilibrio di corpi in quiete, ossia fermi, o mobili di moto rettilineo uniforme. In effetti applichiamo
Capitolo 2 Statica del corpo rigido La statica è la parte della meccanica che si occupa dello studio dell equilibrio di corpi in quiete, ossia fermi, o mobili di moto rettilineo uniforme. In effetti applichiamo
Robot in contatto con l ambiente: Introduzione
 Corso di Robotica 2 Robot in contatto con l ambiente: Introduzione Prof. Alessandro De Luca A. De Luca Interazione robot-ambiente il robot può interagire con l ambiente modificando lo stato dell ambiente
Corso di Robotica 2 Robot in contatto con l ambiente: Introduzione Prof. Alessandro De Luca A. De Luca Interazione robot-ambiente il robot può interagire con l ambiente modificando lo stato dell ambiente
Il ciclo di lavorazione
 INTRODUZIONE AI CICLI DI LAVORAZIONE 1 Il ciclo di lavorazione DEFINIZIONE: Si dice CICLO DI LAVORAZIONE tutto l insieme di operazioni necessarie a fabbricare un singolo elemento attraverso una successione
INTRODUZIONE AI CICLI DI LAVORAZIONE 1 Il ciclo di lavorazione DEFINIZIONE: Si dice CICLO DI LAVORAZIONE tutto l insieme di operazioni necessarie a fabbricare un singolo elemento attraverso una successione
Ministero dello Sviluppo Economico
 Beni strumentali - Agenzia delle entrate circolare 4 del 30/3/2017- Pagina 1 di 5 CIRCOLARE N.4/E del 30/03/2017 Direzione Centrale Normativa Ministero dello Sviluppo Economico Alle Direzioni regionali
Beni strumentali - Agenzia delle entrate circolare 4 del 30/3/2017- Pagina 1 di 5 CIRCOLARE N.4/E del 30/03/2017 Direzione Centrale Normativa Ministero dello Sviluppo Economico Alle Direzioni regionali
COMPENSAZIONE INTRODUZIONE
 E L E M E N T I D I COMPENSAZIONE KipCOMP.pdf Edizione 12-00 INTRODUZIONE Si tratta di elementi modulari, in grado di consentire movimenti di compensazione passivi in diverse direzioni. Grazie alla combinazione
E L E M E N T I D I COMPENSAZIONE KipCOMP.pdf Edizione 12-00 INTRODUZIONE Si tratta di elementi modulari, in grado di consentire movimenti di compensazione passivi in diverse direzioni. Grazie alla combinazione
Addetto alla saldatura e carpenteria
 Addetto alla saldatura e carpenteria PROFILO FORMATIVO ADDETTO ALLA SALDATURA E CARPENTERIA Prestazione chiave/ UC Prestazioni componenti ME107 - Eseguire lavorazioni di aggiustaggio* ME103 - Attrezzare
Addetto alla saldatura e carpenteria PROFILO FORMATIVO ADDETTO ALLA SALDATURA E CARPENTERIA Prestazione chiave/ UC Prestazioni componenti ME107 - Eseguire lavorazioni di aggiustaggio* ME103 - Attrezzare
Professionisti dell automazione dei processi di movimentazione SOLUZIONI INTEGRATE PER LA LOGISTICA DI MAGAZZINO
 Professionisti dell automazione dei processi di movimentazione SOLUZIONI INTEGRATE PER LA LOGISTICA DI MAGAZZINO MOVIMENTAZIONE Gli impianti di movimentazione vengono realizzati a partire da un attenta
Professionisti dell automazione dei processi di movimentazione SOLUZIONI INTEGRATE PER LA LOGISTICA DI MAGAZZINO MOVIMENTAZIONE Gli impianti di movimentazione vengono realizzati a partire da un attenta
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Sensori di Posizione e Velocità
 Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Filippo D Ippolito ROBOTICA INDUSTRIALE Introduzione al corso
 Filippo D Ippolito filippo.dippolito@unipa.it ROBOTICA INDUSTRIALE Introduzione al corso Robotica: connessione intelligente tra percezione e azione CONTROLLO ATTUATORI SENSORI Sistema meccanico Organi
Filippo D Ippolito filippo.dippolito@unipa.it ROBOTICA INDUSTRIALE Introduzione al corso Robotica: connessione intelligente tra percezione e azione CONTROLLO ATTUATORI SENSORI Sistema meccanico Organi
Luigi Piroddi
 Automazione industriale dispense del corso 11. Modellizzazione con reti di Petri piroddi@elet.polimi.it Introduzione Un sistema di produzione automatizzato serve a ottenere prodotti finiti a partire da
Automazione industriale dispense del corso 11. Modellizzazione con reti di Petri piroddi@elet.polimi.it Introduzione Un sistema di produzione automatizzato serve a ottenere prodotti finiti a partire da
QUOTATURA PARTE 2. î IN QUESTA LEZIONE PROF. CATERINA RIZZI DIPARTIMENTO DI INGEGNERIA GESTIONALE,
 QUOTATURA PARTE 2 PROF. CATERINA RIZZI DIPARTIMENTO DI INGEGNERIA GESTIONALE, DELL INFORMAZIONE E DELLA PRODUZIONE î IN QUESTA LEZIONE CLASSIFICAZIONE punto di vista geometrico quote di grandezza quote
QUOTATURA PARTE 2 PROF. CATERINA RIZZI DIPARTIMENTO DI INGEGNERIA GESTIONALE, DELL INFORMAZIONE E DELLA PRODUZIONE î IN QUESTA LEZIONE CLASSIFICAZIONE punto di vista geometrico quote di grandezza quote
CHECK LIST SALUTE E SICUREZZA SUL LAVORO Pg. 1 /6
 CHECK LIST SALUTE E SICUREZZA SUL LAVORO Pg. 1 /6 Servizio richiesto: OHSAS 18000 nuova certificazione mantenimento estensione audit interni formazione D.LGS. 81/2008 Check-up adempimenti sicurezza sul
CHECK LIST SALUTE E SICUREZZA SUL LAVORO Pg. 1 /6 Servizio richiesto: OHSAS 18000 nuova certificazione mantenimento estensione audit interni formazione D.LGS. 81/2008 Check-up adempimenti sicurezza sul
Unità 2 Trasporti interni
 Impianti industriali Unità 2 Trasporti interni Trasporti interni Carrelli per il trasporto e il sollevamento Trasportatori meccanici fissi Trasporti meccanici mobili Trasporti automatici 2 2005 Politecnico
Impianti industriali Unità 2 Trasporti interni Trasporti interni Carrelli per il trasporto e il sollevamento Trasportatori meccanici fissi Trasporti meccanici mobili Trasporti automatici 2 2005 Politecnico
La rugosità superficiale
 La rugosità superficiale Tutte le superfici lavorate sono caratterizzate da una rugosità superficiale che è, in sostanza, l irregolarità della superficie rispetto alla superficie teorica. Le irregolarità
La rugosità superficiale Tutte le superfici lavorate sono caratterizzate da una rugosità superficiale che è, in sostanza, l irregolarità della superficie rispetto alla superficie teorica. Le irregolarità
CENTRO DI LAVORO EC43 5 assi con alimentatore
 5 assi con alimentatore Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Altri file a disposizione
5 assi con alimentatore Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Altri file a disposizione
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore