Relazione progetto di Sistemi Embedded
|
|
|
- Sebastiano Colombo
- 5 anni fa
- Visualizzazioni
Transcript
1 Relazione progetto di Sistemi Embedded Stefano Cicero Mattia Ridolfi a.a. 2014/2015
2 SOMMARIO 1. Introduzione Esercizio 1 Relay Logic... 5 Soluzione - Approccio A... 5 Soluzione - Approccio B Esercizio 2 Door Simulation Esercizio Soluzione Approccio A... 8 Soluzione Approccio B Esercizio Soluzione Approccio A Soluzione Approccio B Esercizio Soluzione Approccio A Soluzione Approccio B Esercizio Soluzione Approccio A Risoluzione Approccio B Esercizio 3 Silo Esercizio Soluzione Approccio A Soluzione Approccio B Esercizio Soluzione Approccio A Soluzione Approccio B Esercizio Soluzione Approccio A Soluzione Approccio B Esercizio 4 Batch Mixing Esercizio Soluzione Approccio A Soluzione Approccio B Esercizio
3 Soluzione Approccio A Soluzione Approccio B Esercizio Soluzione Approccio A Soluzione Approccio B Conclusioni... 37
4 1. Introduzione Il progetto prevede lo svolgimento di esercizi riguardanti la programmazione di PLC (Programmable Logic Controller) mediante il programma LogixPro 500 che simula un vero e proprio PLC. Gli esercizi sono presi dalla seguente URL In particolare, quelli che saranno trattati in questo progetto sono: Esercizio 1 - Relay Logic Esercizio 2 - Door Simulation Esercizio 3 - Silo Esercizio 4 - Batch Mixing Per la risoluzione di ciascun esercizio abbiamo adottato due differenti tipi di approccio: a) nel primo si è trattato di individuare le uscite del sistema e ad esse associare la logica che le deve pilotare. Avremo quindi, in generale, un numero di rung pari alle uscite del sistema b) nel secondo approccio, il sistema è stato modellato come una macchina a stati che è stata successivamente tradotta in logica ladder. Pertanto in questo caso avremo un numero di rung che sarà proporzionale al numero di stati individuati per un dato sistema.
, viene richiesto di realizzare un programma che consenta di controllare l accensione e lo spegnimento di una luce da due differenti interruttori.")
5 2. Esercizio 1 Relay Logic Il primo esercizio costituisce sostanzialmente un introduzione alla programmazione di PLC. Utilizzando I/O Simulator (Figura 1), viene richiesto di realizzare un programma che consenta di controllare l accensione e lo spegnimento di una luce da due differenti interruttori. Gli interruttori sono denominati rispettivamente I:1/00 e I:1/01, mentre la luce è denominata O:2/00. Se entrambi gli interruttori sono accesi, o entrambi sono spenti la luce deve rimanere accesa. Figura 1 Soluzione - Approccio A Dal testo dell esercizio è facilmente ricavabile la tabella di verità associata al sistema riportata in Tabella 1. Switch 0 Switch 1 Lamp Tabella 1 Da quest ultima si evince che il nostro sistema si comporta esattamente come una porta XNOR che in logica ladder si traduce come mostrato in Figura 2. Figura 2


6 Soluzione - Approccio B Per il sistema in oggetto abbiamo individuato la macchina a stati di Moore riportata in Figura 3. Figura 3 Si tratta di una a macchina costituita da 2 stati: nello stato S0 la luce è spenta mentre nello stato S1 è accesa. La macchina rimane o va nello stato S0 se almeno uno dei due switch è acceso. La macchina rimane o va nello stato S1 se entrambi gli switch sono spenti o entrambi sono accesi. Questo diagramma può essere tradotto in logica ladder come riportato in Figura 4. Figura 4 Un programma scritto in questo modo può essere suddiviso in 3 parti: 1. definizione delle transizioni che portano ad un determinato stato (righe 0 e 1); 2. impostazione dello stato corrente come il nuovo stato determinato nella prima parte (riga 2) 3. settaggio delle uscite associate allo stato corrente (riga 3) Quando si utilizza questo tipo di approccio, per consentire il corretto funzionamento del simulatore, occorre settare opportunamente il registro di stato del PLC in modo che l esecuzione inizi dallo stato S0.
7 Il corrispondente diagramma per una macchina di Mealy è facilmente ottenibile da quello di Moore impostando le uscite sulle transizioni invece che sugli stati come mostrato in Figura 5. Figura 5 In Figura 6 è riportata la traduzione in logica ladder del diagramma di Mealy. Figura 6 Com è possibile notare, i diagrammi e i ladder di Mealy e di Moore sono del tutto simili tra loro. Per questo motivo nel seguito della relazione, e per ciò che concerne questo approccio, riporteremo soltanto diagrammi e ladder di Moore.

8 3. Esercizio 2 Door Simulation L esercizio seguente è suddiviso in 4 sotto esercizi e fa uso del Door Simulator (Figura 7). In questa simulazione è presente una porta che può essere aperta e chiusa mediante un motore. Sono presenti degli interruttori di apertura, chiusura e di stop. Vi sono inoltre 2 interruttori che si attivano rispettivamente quando la porta è completamente aperta e quando è completamente chiusa. Figura Esercizio 2.1 In questo esercizio i pulsanti Open e Close saranno utilizzati per controllare il movimento della porta. Il movimento non verrà mantenuto se i pulsanti verranno rilasciati e il pulsante Stop non verrà utilizzato in questo esercizio. La pressione del pulsante Open provocherà l apertura della porta se non è già aperta del tutto. L apertura continuerà finché il pulsante rimarrà premuto. Se il pulsante viene rilasciato o se lo switch di limite LS1 si apre, il movimento della porta si blocca immediatamente. La pressione del tasto Close causerà la chiusura della porta se non già completamente chiusa. La porta continuerà a chiudersi finché il tasto è premuto. Se il pulsante viene rilasciato o lo switch di limite LS2 si chiude, il movimento della porta si blocca immediatamente. Se la porta è completamente aperta la pressione del tasto Open non deve fornire corrente al motore. Se la porta è completamente chiusa, la pressione del tasto Close non deve fornire corrente al motore. In nessun caso deve essere possibile fornire corrente al motore per l apertura e la chiusura simultaneamente. La Open Lamp deve essere illuminata quando la porta è completamente aperta. La Shut Lamp deve essere illuminata se la porta è completamente chiusa. Soluzione Approccio A In Figura 8 è riportato il ladder che consente al PLC di comportarsi come richiesto dall esercizio.
9 Figura 8 Come già detto nell introduzione, mediante questo approccio avremo un rung per ogni uscita del sistema. Passiamo ora ad analizzare le singole righe: riga 0: pilota l uscita che comanda il motore che alza la serranda; questa uscita verrà attivata se viene premuto il tasto Open e se lo switch posto in cima è attivo (segno che la serranda non è del tutto aperta) riga 1: pilota l uscita che accende la luce Open ; questa uscita verrà attivata se lo switch posto in cima è spento (segno che la serranda è aperta del tutto) riga 2: pilota l uscita che comanda il motore che abbassa la serranda; questa uscita verrà attivata se viene premuto il tasto Close e se lo switch posto in basso è spento (segno che la serranda non è totalmente chiusa) riga 3: pilota l uscita che accende la luce Close ; questa uscita verrà attivata se lo switch posto in basso è acceso Soluzione Approccio B Per questo sistema abbiamo individuato 5 stati che sono riportati in Tabella 2 assieme alle uscite associate. Stato Significato Motor Up Motor Down Open Lamp Shut Lamp S0 Porta tutta chiusa S1 Porta in apertura S2 Porta in chiusura S3 Porta tutta aperta S4 Porta a mezz aria ferma Tabella 2 Il comportamento della macchina a stati è descritto dal diagramma in Figura 9. Gli ingressi riportati nel diagramma sono nell ordine: tasto Open, tasto Close, switch di limite in alto e switch di limite in basso.


10 Figura 9 In Figura 10 è riportata la traduzione in logica ladder. Per via delle dimensioni dell immagine è mostrata solo la prima parte, relativa alla definizione delle transizioni. Figura Esercizio 2.2 Partendo dall esercizio precedente bisogna modificare il comportamento del programma in modo che la porta continui ad aprirsi o chiudersi anche dopo che il pulsante Open o Close sia stato rilasciato. Se la porta è in movimento e viene premuto il tasto Stop la porta deve fermarsi immediatamente anche una volta che il tasto è stato rilasciato. La Ajar Lamp deve essere illuminata se la porta non è ne completamente chiusa ne completamente aperta. La Open Lamp deve accendersi quando la porta è completamente aperta mentre la Shut Lamp
11 deve accendersi quando la porta è completamente chiusa. In nessun caso i motori devono essere alimentati in contemporanea. Soluzione Approccio A Rispetto all esercizio precedente abbiamo un nuovo input (pulsante Stop ) e un uscita in più ( Ajar Lamp ). Partendo dal ladder scritto per l esercizio 2.1, è sufficiente aggiungere un nuovo rung per accendere la Ajar Lamp quando la porta non è ne completamente aperta ne completamente chiusa. Successivamente bisogna fare in modo che alla pressione del tasto Stop la porta smetta di muoversi. Infine bisogna modificare i rung che pilotano le uscite Motor Up e Motor Down in modo che sia sufficiente premere una sola volta i tasti Open e Close per attivare i motori. Questo si ottiene mettendo in ingresso le uscite dei motori come mostrato in Figura 11. Da notare come il tasto Stop sia normalmente chiuso a differenza dei tasti Open e Close che sono normalmente aperti. Figura 11 Soluzione Approccio B Come è possibile vedere dalla Tabella 3 gli stati rimangono identici a quelli dell esercizio 2.1. Come detto in precedenza, vi è l uscita aggiuntiva Ajar Lamp che verrà attivata negli stati S1, S2 e S4. Stato Significato M. Up M. Down Open L. Shut L. Ajar L. S0 Porta tutta chiusa S1 Porta in apertura S2 Porta in chiusura S3 Porta tutta aperta S4 Porta a mezz aria ferma Tabella 3 Il relativo diagramma di Moore è riportato in Figura 12. Rispetto all esercizio precedente le principali differenze riguardano il passaggio diretto dallo stato S1 a S2 e viceversa e i cicli di questi ultimi.

12 Figura 12 La traduzione in ladder è riportata in Figura 13. Figura Esercizio 2.3 A partire dall esercizio precedente bisogna fare in modo che quando la porta si sta aprendo la Open Lamp deve illuminarsi a intermittenza. Quando la porta si sta chiudendo la Shut Lamp deve illuminarsi a intermittenza. La Ajar Lamp deve accendersi a intermittenza se la porta è ferma e non completamente chiusa ne completamente aperta. La Ajar Lamp deve illuminarsi con una frequenza di ¼ più lenta rispetto alle altre luci. La Ajar Lamp deve avere luce fissa se la porta è in movimento. Soluzione Approccio A Il ladder che svolge quanto richiesto è riportato in Figura 14.
13 Figura 14 Come è possibile notare il numero di rung è rimasto uguale. Le modifiche apportate consistono nell aggiunta dei casi in cui le varie luci debbano lampeggiare. Per ottenere l intermittenza delle luci abbiamo anteposto all uscita un bit di un timer del PLC (S:4/x) che con una certa frequenza oscilla tra 0 e 1. Prendendo bit meno significativi avremo frequenze di oscillazione maggiori; viceversa, prendendo bit più significativi avremo frequenze di oscillazione minori. Per la precisione, se un certo bit in posizione X oscilla con frequenza L, il bit immediatamente affianco meno significativo in posizione X- 1 oscillerà con frequenza 2L. Soluzione Approccio B Gli stati e le relative uscite sono riportati in Tabella 4. Stato Significato M. Up M. Down Open L. Shut L. Ajar L. S0 Porta tutta chiusa S1 Porta in apertura 1 0 L 0 1 S2 Porta in chiusura L 1 S3 Porta tutta aperta S4 Porta a mezz aria ferma L Tabella 4 Il valore L presente in tabella sta ad indicare che l uscita a cui è associato è lampeggiante, cioè oscilla tra 0 e 1. Essendoci soltanto una variazione delle uscite associate a ciascun stato il diagramma di Moore è lo stesso di Figura 12. Di conseguenza anche il ladder resta identico a quello dell esercizio precedente a parte che per delle piccole modifiche nelle uscite degli stati S1, S2 e S4 per rendere le luci lampeggianti. Come esempio riportiamo le uscite definite per lo stato S1 in Figura 15.
14 Figura 15 Questo stato identifica la fase di apertura della serranda. Pertanto il motore che apre la serranda viene attivato mentre quello che la chiude è disattivato. La Ajar Lamp viene attivata poiché la porta non è ne completamente chiusa ne completamente aperta e la Shut Lamp è disattivata poiché la porta non è completamente chiusa. La Open Lamp è stata fatta lampeggiare attivando l uscita corrispondente quando il bit del timer del PLC è 1 e disattivandola quando è a Esercizio 2.4 A questo punto viene richiesto di modificare l esercizio precedente in modo che se la porta si sta chiudendo e viene premuto il tasto Open la porta invece che invertire immediatamente il movimento si ferma e viceversa. Soluzione Approccio A Per la risoluzione di questo esercizio ci siamo serviti di un flag denominato In Motion Flag che viene messo a 1 quando la porta si sta aprendo o chiudendo; vale 0 invece quando entrambi i motori sono disattivati e non è premuto ne il tasto Open ne il tasto Close. In questo modo quando la porta è in movimento e viene premuto un tasto che comanda un movimento nella direzione opposta la porta viene fermata. Il ladder è riportato in Figura 16. Figura 16

15 Risoluzione Approccio B Poiché rispetto all esercizio 2.3 le uscite del sistema non cambiano, anche in questo caso vale sostanzialmente quanto riportato in Tabella 4. Per fare in modo che la porta si fermi quando viene impartito un movimento opposto a quello in cui si sta muovendo abbiamo aggiunto uno stato di pre stop, denominato S5, in cui il sistema rimarrà fino al rilascio del tasto Open o Close per poi passare allo stato vero e proprio di stop corrispondente a S4. Le uscite dello stato S5 sono le stesse di S4. L aggiunta di uno stato di pre stop è stato necessario poiché, in caso contrario, per un corretto funzionamento la pressione del tasto Open o Close dovrebbe durare un ciclo di clock il che è quasi impossibile in un utilizzo reale. Difatti i tasti vengono premuti per più di un ciclo di clock e il sistema rimarrebbe nello stato di stop per un ciclo, per poi passare allo stato di movimento relativo al tasto premuto nel ciclo successivo. Il diagramma di Moore è riportato in Figura 17. Figura 17 Il relativo ladder è mostrato in Figura 18.
16 Figura 18

17 4. Esercizio 3 Silo In questo esercizio viene utilizzata la Silo Simulation mostrata in Figura 19. In questa simulazione vi è un nastro trasportatore su cui scorrono delle scatole che devono essere riempiti con del materiale contenuto in un silo. Sono presenti i seguenti componenti: i pulsanti Start e Stop ( I:1/00, I:1/01 ) le 3 luci Run, Fill e Full ( O:2/02, O:2/03, O:2/04 ) una valvola che apre e chiude il silo ( O:2/01 ) un sensore che indica quando la scatola è piena ( I:1/04 ) un sensore di prossimità che indica quando la scatola si trova sotto il silo ( I:1/03 ) un motore che fa scorrere il nastro ( O:2/00 ) uno switch di selezione ( I:1/05, I:1/06, I:1/07 ) Figura Esercizio 3.1 Viene richiesto di programmare il PLC in modo che le scatole che scorrono sul nastro trasportatore vengano riempite automaticamente con il liquido contenuto nel silo. La sequenza può essere interrotta e fatta ripartire mediante i pulsanti Stop e Start. La luce Run deve rimanere accesa fintanto che il sistema opera in maniera automatica. La luce Run, il motore del nastro trasportatore, e la valvola non devono essere alimentati se viene premuto il tasto Stop. La luce Fill deve accendersi quando la scatola si sta riempendo. La luce Full si deve accendere quando la scatola è piena e fintanto che la scatola non avrà superato il sensore di prossimità. Soluzione Approccio A In Figura 20 è riportato il programma in logica ladder. La soluzione adottata in questo caso consiste nell attivare, e mantenere attiva, la Run Lamp a seguito della pressione del tasto Start che a sua volta costituisce una condizione necessaria affinché il motore del nastro trasportatore o la valvola si possano attivare.
18 Figura 20 Soluzione Approccio B Con l uso di una macchina di Moore innanzi tutto bisogna individuare gli stati del diagramma che corrisponderanno alle uscite del sistema, analoghe a quelle trovate per l approccio precedente. Nella Tabella 5 abbiamo riportato la tabella degli stati con le uscite associate. Stato Significato Motor S. Valve Run L. Fill L. Full L. S0 Stop del motore per lo stato S1 e S2 S1 Il carrello è attivo S2 Il riempimento è attivo S3 Box pieno S4 Stop del motore per lo stato S Tabella 5 Il sistema è composto quindi da quattro stati di cui due sono per gestire il pulsante di Stop. Nello stato S1 il carrello è in movimento ed il box viene trasportato fino al Silo, con la lampada Run accesa. Nello stato S2 inizia la fase del riempimento con la lampada Fill accesa ed il motore fermo. Nello stato S3 il box diventa pieno, la lampada di Full si accende insieme al motore, e rimane in questo stato fintanto che il sensore di prossimità è attivo. Lo stato S0 è quello di partenza e corrisponde a fermare sia il motore del carrello sia il riempimento del box e perciò interessa gli stati S1 e S2. Per S3 lo stato di stop deve essere diverso in quanto abbiamo previsto che la lampada di Full rimanga attiva e perciò si è reso necessario implementare un uscita diversa per questo particolare stato che interessa solamente S3. In Figura 21 è mostrato il diagramma di Moore con le specifiche transizioni. L ordine degli ingressi è Start, Stop, Prox Sensor e Level Sensor.

19 Figura 21 Negli stati S0 e S4, che sono quelli di stop, ci si arriva quando l utente preme il pulsante di Stop dal pannello. Lo stato S1 rimane attivo se i sensori del Silo sono disattivati, e quindi è necessario solamente spostare il box sul carrello per posizionarlo. Lo Stato S2 diviene attivo quando il sensore di prossimità rileva il box e rimane attivo fintanto che il sensore di livello non indica che il box è pieno, in tal caso si passa direttamente allo stato S3, che cambia il box appena riempito fintanto che il sensore di prossimità rimane attivo. Il diagramma di Moore tradotto in ladder è riportato in Figura 22.
20 Figura Esercizio 3.2 Partendo dall esercizio precedente bisogna programmare il PLC in modo che una volta che la scatola è stata riempita il sistema si fermi e possa ripartire solo a seguito della pressione del tasto Start. Soluzione Approccio A La soluzione, riportata in Figura 23, è molto simile a quella dell esercizio precedente. In questo caso però abbiamo dovuto ricorrere all utilizzo di un flag denominato Continue Flag che si attiva alla pressione del tasto Start e resta attivo fintanto che la Run Lamp e la Full Lamp restano attive. La sua utilità è quella, a seguito della pressione del tasto Start, di far scorrere fino alla fine la scatola dopo che il sistema si è fermato e bypassare quindi il controllo sul sensore di prossimità, che in questo modo viene controllato solo prima della fase di riempimento della scatola.
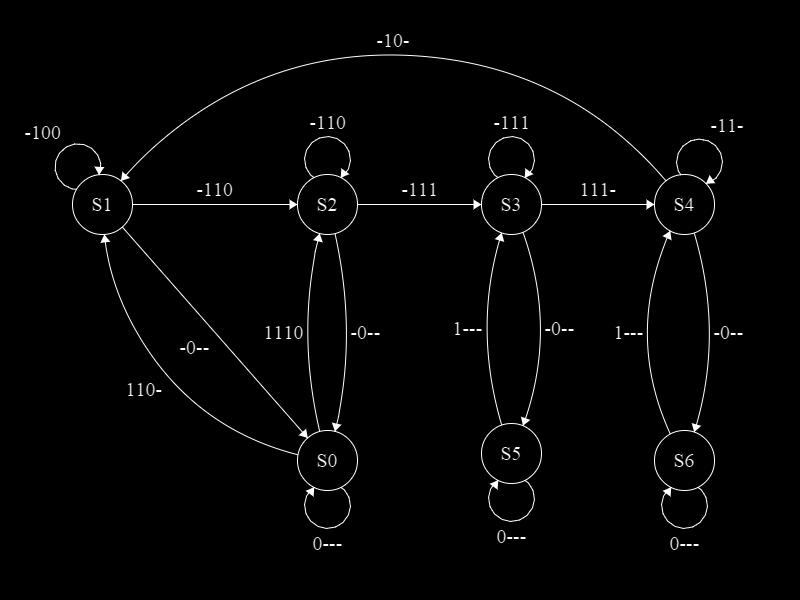
21 Figura 23 Soluzione Approccio B Rispetto all esercizio precedente è stato necessario aggiungere un ulteriore stato per permettere alla scatola di fermarsi dopo essersi riempita. È stato quindi aggiunto anche il relativo stato di stop per quella condizione. Nella Tabella 6 vediamo la tabella degli stati con le relative uscite. S3 diventa lo stato in cui la scatola è piena ma il motore del carrello rimane spento fintanto che l utente non preme il tasto di Start, S4 è predisposto solo al cambio della scatola fintanto che il sensore di prossimità è attivo, e S5 e S6 sono gli stati di stop degli stati S4 e S3. Stato Significato Motor S. Valve Run L. Fill L. Full L. S0 Stop del motore per lo stato S1 e S2 S1 Il carrello è attivo S2 Il riempimento è attivo S3 Box pieno ma fermo S4 Cambio del box pieno S5 Stop del motore per lo stato S4 S6 Stop per lo stato S Tabella 6 In Figura 24 vediamo il diagramma di Moore relativo a questo esercizio, in sostanza cambia molto poco rispetto all esercizio precedente. In Figura 25 vediamo il Ladder analogo. È importante sottolineare come in questo approccio non è stato necessario far uso del bit di Flag (come nell approccio A), riducendo quindi le variabili di ingresso del sistema. L ordine degli ingressi è lo stesso dell esercizio precedente.
22 Figura 24
23 Figura Esercizio 3.3 A partire dall esercizio precedente bisogna programmare il PLC in modo che il sistema possa funzionare in 3 modalità diverse:
24 se lo switch di selezione è impostato su A il sistema deve operare come previsto dall esercizio 3.1 se lo switch di selezione è impostato su B il sistema deve operare come previsto dall esercizio 3.2 se lo switch di selezione è impostato su C il sistema deve far scorrere continuamente le scatole bypassando la fase di riempimento Soluzione Approccio A Visto che non è stato specificato nel testo dell esercizio, e per semplicità, abbiamo supposto che l utente possa cambiare modalità di funzionamento della macchina solo quando una scatola è appena transitata e ne sta arrivando un altra. In Figura 26 è riportata la soluzione. Per implementare il comportamento della macchina in modalità C è stato sufficiente bypassare il controllo sul sensore di prossimità quando viene comandato il nastro trasportatore (riga 0). Per quanto riguarda il funzionamento nella modalità B non è stato ovviamente necessario apportare alcuna modifica rispetto all esercizio precedente. Per il funzionamento in modalità A abbiamo semplicemente aggiunto una sorta di Continue Flag sempre attivo che quindi anche dopo il riempimento della scatola non fa fermare la macchina (riga 0). Figura 26 Soluzione Approccio B Con questo approccio gli stati rimangono gli stessi dell esercizio precedente e la tabella degli stati rimane quella della Tabella 6. Ciò che cambia sono le transizioni da uno stato all altro per permettere tutte le modalità richieste dall esercizio. Nella Figura 27 vediamo il diagramma di Moore più complesso rispetto all esercizio 3.2: La modalità A è garantita dal percorso S1 - > S2 - > S4, risultando il diagramma praticamente identico all esercizio 3.1. La modalità B è garantita dal percorso S1 - > S2 - > S3 - > S4 come nell esercizio precedente.

25 La modalità C è un caso particolare dello stato S1, dove appunto si attiva con 2 combinazioni di ingresso differenti. Ovviamente in questo diagramma si è reso necessario aggiungere più bit di ingresso per il controllo della modalità e non si fa uso del bit di Flag dell approccio A. Figura 27 In Figura 28 è mostrato il relativo Ladder. Aumenta leggermente la complessità del Ladder precedente, dato che abbiamo più transizioni da gestire. In questo caso l approccio B è stato più efficiente perché si trattava di aggiungere transizioni, senza toccare le uscite, risparmiando tempo rispetto all approccio A tradizionale.
26 Figura 28

27 5. Esercizio 4 Batch Mixing Il sistema da controllare in questo esercizio è un impianto in cui è presente una cisterna nella quale, attraverso una pompa, viene versato del liquido. In seguito questo liquido viene mescolato tramite un motore e infine espulso mediante un altra pompa. I componenti del sistema sono: i pulsanti Start e Stop ( I:1/0, I:1/1 ) le luci Run, Idle e Full ( O:2/5, O:2/6, O:2/7 ) due pompe Pump 1 e Pump 3 ( O:2/1, O:2/3 ) due flussometri Flowmeter 1 e Flowmeter 3 ( I:1/5, I:1/7 ) un display ( O:4 ) Figura Esercizio 4.1 Viene richiesto di scrivere un programma che controlli il sistema nel seguente modo: quando viene premuto il tasto Start viene alimentata la pompa P1 e la cisterna inizia a riempirsi. Una volta che la cisterna si riempie al 90% circa la pompa P1 deve essere spenta e la luce Full deve accendersi. L operazione di riempimento deve essere fermata in qualsiasi momento se viene premuto il tasto Stop. Soluzione Approccio A La soluzione è riportata in Figura 30. Per determinare il momento in cui la pompa P1 dovesse disattivarsi a seguito del raggiungimento del 90% della capacità della cisterna, abbiamo inserito nel ladder un contatore di tipo up che ha come ingresso il flussometro 1 (riga 1). Una volta raggiunto il valore prestabilito (270), il contatore attiva la sua uscita Done che utilizziamo per disattivare la pompa P1 (riga 0) e per accendere la luce Full. Nella riga 3 è stata inserita un istruzione per inviare al display il valore attuale del contatore.
28 Figura 30 Soluzione Approccio B Come si vede dalla Tabella 7 il sistema è composto da 3 stati. In S1 la pompa è attiva e riempie la cisterna, in S2 la cisterna è piena con l accensione della lampada di Full e in S0 è lo stato di partenza o di stop della pompa. Stato Significato Pump 1 Full L. S0 Stop della pompa 0 0 S1 La pompa 1 è attiva 1 0 S2 La cisterna è piena 0 1 Tabella 7 La difficoltà in questo approccio è gestire il contatore ed il suo evento. Abbiamo ritenuto corretto inserire un po di logica aggiuntiva per gestire il contatore come componente a sé stante, e utilizzare il bit del contatore come ingresso del sistema. Con questa soluzione il diagramma di Moore è facile da costruire con le sue transizioni, ed il contatore è semplicemente un ingresso aggiuntivo, come viene mostrato nella Figura 31. L ordine degli ingressi è Start, Stop, ed il bit del contatore C1_DN che scatta ad 1 quando la sequenza raggiunge il valore impostato. Mentre nella Figura 32 si nota il Ladder associato in cui nella riga 003 abbiamo inserito la logica necessari a gestire l evento del contatore.

29 Figura 31 Figura 32
30 5.2. Esercizio 4.2 Il programma scritto nell esercizio precedente deve essere modificato in modo che una volta che la cisterna è piena viene attivato per 8 secondi il motore che mescola i liquidi. Infine la cisterna deve essere svuotata utilizzando la pompa P3 e il sistema si deve fermare. Il sistema deve ripartire se viene premuto il tasto Start. Soluzione Approccio A In Figura 33 è riportata la soluzione. Rispetto all esercizio precedente è stato aggiunto un contatore down in modo da tenere conto della quantità di liquido presente nella cisterna durante o a seguito dello svuotamento della stessa (riga 2). Una volta che viene raggiunto il 90% della capacità della cisterna (uscita Done del contatore attiva) viene attivato il motore che mescola il liquido e un timer. Quest ultimo una volta passati 8 secondi attiva la sua uscita Done con la quale viene disattivato il mescolatore e attivata la pompa P3 per svuotare la cisterna. Nella riga 3 è stata inserita un istruzione Equal che una volta che il contatore ha raggiunto il valore 0 (cisterna vuota) attiva l Empty Flag utilizzato per spegnere la pompa P3. Figura 33 Soluzione Approccio B Questa volta si è reso necessario aggiungere un nuovo stato S3 per garantire la condizione di svuotamento della cisterna imposta dall esercizio. Lo stato S2 indica la condizione della cisterna piena ed è stato ampliato anche con l aggiunta del Mixer. Lo stato S0 di Stop è rimasto analogo a quello precedente, dato che l esercizio non specificava di fermare il sistema negli altri stati. Nella Tabella 8 c è la nuova tabella degli stati con le relative uscite.
31 Stato Significato Mixer Pump 1 Pump 3 Full L. S0 Stop della pompa S1 La pompa 1 è attiva S2 La cisterna è piena ed il mixer è attivo S3 Svuotamento della cisterna Tabella 8 Nella Figura 34 vediamo il nuovo diagramma di Moore, in cui si nota il ciclo degli archi. Anche in questo approccio abbiamo inserito il bit di Flag per indicare quando la cisterna è vuota. Dagli input a disposizione non era possibile risalire a questo stato se non andando ad aggiungere un comparatore. Anche in questo approccio è stata inclusa della logica aggiuntiva per il timer ed i contatori, in modo da semplificare il diagramma. Nella Figura 35 è disegnato il Ladder del sistema. L ordine degli ingressi è Start, Stop, bit del contatore C1_DN, il bit del timer T1_DN che scatta ad 1 quando scade il tempo, ed il bit Empty Flag che scatta ad 1 quando la cisterna è vuota. Figura 34
32 Figura Esercizio 4.3 Il programma deve essere modificato in modo che il sistema lavori in maniera continuativa e quindi non si fermi a meno di premere il tasto Stop. In questo caso a seguito della pressione del tasto Start il sistema deve riprendere a funzionare da dove si era interrotto. Quando il sistema è in funzione la luce Run deve essere accesa, mentre a seguito della pressione del tasto Stop si deve accendere la luce di Idle.
33 Soluzione Approccio A La soluzione è mostrata in Figura 36. Abbiamo aggiunto due flag: Activation e Filling Flag (inserito dopo le uscite dei contatori nella riga 4). Il primo consente l attivazione dei rung necessari al funzionamento del sistema. Il secondo serve per capire in quale stato si trovava il sistema prima della pressione del tasto Stop. Infatti il sistema si trovava nella fase di riempimento se vale 1, nella fase di svuotamento se vale 0. Inoltre è stato modificato il tipo di timer poiché quello dell esercizio precedente, una volta raggiunto il valore preimpostato, inviava un impulso sulla sua uscita e poi rimetteva l uscita a 0. Quello usato in questo esercizio è invece di tipo retentive quindi l uscita viene mantenuta attiva. Di conseguenza è necessario resettare il contatore una volta svuotata la cisterna (riga 7). Figura 36 Soluzione Approccio B Le uscite sono aumentate rispetto all esercizio 4.2, come anche gli stati da gestire. S4 e S5 sono riferiti agli stop. Nella Tabella 9 è mostrata la tabella della verità, nella Figura 37 il
34 diagramma di Moore e nella Figura 38 il Ladder. Anche con questo approccio il timer è stato cambiato mettendone uno di tipo RTO con il relativo reset. Gli ingressi sono rimasti gli stessi. Stato Significato Mixer Pump 1 Pump 3 Run L. Idle L. Full L. S0 Stop della pompa S1 La pompa 1 è attiva S2 La cisterna è piena ed il mixer è attivo S3 Svuotamento della cisterna S4 Stop del mixer S5 Stop della pompa Tabella 9 Figura 37
35 Figura 38
36 Rispetto al Ladder precedente sono stati aggiunti solo i due stati di stop e modificato leggermente le transizioni. Con questo approccio è bastato solo ampliare gli stati ed integrare le proprie transizioni rispetto al ladder già scritto precedentemente, oltreché modificare le uscite con poche operazioni.
37 6. Conclusioni Il progetto ha visto lo svolgimento di esercizi riguardanti la programmazione di PLC. Per ognuno degli esercizi sono stati utilizzati due differenti tipi di approccio per la loro risoluzione. L approccio A, consistente nell associare ad ogni uscita del sistema una logica che la piloti, e l approccio B, in cui il sistema viene modellato come una macchina a stati finiti di Moore (o Mealy) a cui sono associate delle uscite. Per ciò che concerne l esperienza maturata nello svolgimento di questo progetto, possiamo affermare che l approccio A è più indicato nei casi in cui il sistema da controllare sia relativamente semplice (come nell esercizio 1), e i suoi ingressi e le sue uscite consentano di identificare univocamente ciascun stato in cui il sistema si può trovare. Questo approccio in generale utilizza meno rung rispetto all approccio B basato sulla macchina a stati. Viceversa, quest ultimo, è più appropriato nel caso di sistemi più complessi e nel caso in cui non è possibile basarsi solamente sugli input e gli output per stabilire univocamente lo stato in cui si può trovare il sistema. Ad esempio nel caso dell esercizio 3.2 veniva richiesto di fermare il sistema dopo che una scatola era stata riempita, e solo a seguito della pressione del tasto Start il sistema doveva ripartire. Nella soluzione con l approccio A è stato necessario utilizzare un flag che serve a capire lo stato in cui si trova il sistema; infatti dai soli input e output non si riesce a distinguere il caso in cui una scatola debba ancora essere riempita, o sia stata già riempita, poiché quest ultima si troverà prima o poi oltre il sensore di scatola piena ma ancora sopra al sensore di prossimità. Con l approccio B è stato invece sufficiente aggiungere uno stato che rappresenta il caso sopra descritto e quindi ci ha consentito di risolvere il problema in maniera più sistematica e formale. Inoltre questo approccio si è dimostrato essere più tollerante alle modifiche che sono state richieste nei vari punti di ciascun esercizio. In generale possiamo affermare che l approccio A utilizza una combinazione di ingressi e uscite per descrivere l output, e quindi avremo molti input ma un ladder più ristretto e leggibile. L approccio B invece richiede solo gli effetti ingressi del sistema (quindi una sequenza di input inferiore) ma avrà un ladder molto più esteso. Per la realizzazione di esercizi complessi comunque è preferibile l approccio B per i vantaggi detti precedentemente.
TCP - TIMER CICLICO PROGRAMMABILE
 OWNER s MANUAL MANUALE ISTRUZIONI (per firmware v. 2.0 B) TCP - TIMER CICLICO PROGRAMMABILE 2018 by Valter Narcisi www.narcisivalter.it A1 PROGRAMMABLE CYCLIC TIMER with PIC16F628A CARATTERISTICHE / FEATURES
OWNER s MANUAL MANUALE ISTRUZIONI (per firmware v. 2.0 B) TCP - TIMER CICLICO PROGRAMMABILE 2018 by Valter Narcisi www.narcisivalter.it A1 PROGRAMMABLE CYCLIC TIMER with PIC16F628A CARATTERISTICHE / FEATURES
Programmazione dei PLC in linguaggio Ladder
 Programmazione dei PLC in linguaggio Ladder Prima Parte ITI Alessandro Volta - Sassuolo Anno Scolastico 2009/2010 Linguaggio LADDER (linguaggio a contatti ) Introduzione e concetti fondamentali Il LADDER
Programmazione dei PLC in linguaggio Ladder Prima Parte ITI Alessandro Volta - Sassuolo Anno Scolastico 2009/2010 Linguaggio LADDER (linguaggio a contatti ) Introduzione e concetti fondamentali Il LADDER
ATTIVITÀ 1. Controllo con telecomando
 Obiettivo ATTIVITÀ 1 Controllo con telecomando Costruire un programma che permetta il controllo del movimento del robot tramite telecomando Configurazione del robot Per il raggiungimento di questo obiettivo
Obiettivo ATTIVITÀ 1 Controllo con telecomando Costruire un programma che permetta il controllo del movimento del robot tramite telecomando Configurazione del robot Per il raggiungimento di questo obiettivo
Programmazione LADDER dei PLC Esempi ed esercizi Prima parte. ITI Alessandro Volta - Sassuolo Anno Scolastico 2009/2010
 Programmazione LADDER dei PLC Esempi ed esercizi Prima parte ITI Alessandro Volta - Sassuolo Anno Scolastico 29/2 Controllo delle aperture di porte e finestre in una stanza Descrizione del problema e specifiche
Programmazione LADDER dei PLC Esempi ed esercizi Prima parte ITI Alessandro Volta - Sassuolo Anno Scolastico 29/2 Controllo delle aperture di porte e finestre in una stanza Descrizione del problema e specifiche
CLASSE 3 ELETTRICO ESERCITAZIONI DI PLC
 CLASSE 3 ELETTRICO ESERCITAZIONI DI PLC Anno Formativo 2014/2015 Generalità Il software che utilizziamo per le esercitazioni in classe è una versione demo liberamente scaricabile dal seguente link: https://emiliogiomocfpfonte.wordpress.com/link/
CLASSE 3 ELETTRICO ESERCITAZIONI DI PLC Anno Formativo 2014/2015 Generalità Il software che utilizziamo per le esercitazioni in classe è una versione demo liberamente scaricabile dal seguente link: https://emiliogiomocfpfonte.wordpress.com/link/
ESEMPIO QUATTRO: TRAPANO COMPLESSO
 ESEMPIO QUATTRO: TRAPANO COMPLESSO Tecnica basata sulla macchina a stati Il sistema da analizzare è costituito da un trapano che deve effettuare un foro su un pezzo posizionato alla base del sistema. Il
ESEMPIO QUATTRO: TRAPANO COMPLESSO Tecnica basata sulla macchina a stati Il sistema da analizzare è costituito da un trapano che deve effettuare un foro su un pezzo posizionato alla base del sistema. Il
Sauna (Bagno Turco) + Radio FM Stereo + Faro alogeno 10W
 + Radio FM Stereo + Faro alogeno 10W") Via Moriconi n 4/B 60035 Jesi (AN) P.IVA 00738790427 Tel. 0731 605587 Fax 0731 607757 e-mail: info@aes-elettronica.com Sauna (Bagno Turco) + Radio FM Stereo + Faro alogeno 10W Caratteristiche Pannello
Via Moriconi n 4/B 60035 Jesi (AN) P.IVA 00738790427 Tel. 0731 605587 Fax 0731 607757 e-mail: info@aes-elettronica.com Sauna (Bagno Turco) + Radio FM Stereo + Faro alogeno 10W Caratteristiche Pannello
Introduzione alle macchine a stati (non definitivo)
") Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
FLIP 66 ISTRUZIONI PER L'USO
 FLIP 66 ISTRUZIONI PER L'USO Tabella dei contenuti 1- FUNZIONI DELL'APPARECCHIO x 2- MESSA IN FUNZIONE x 3- USO x 4- IMPOSTAZIONE DELL'ORA x 5- MODALITÀ DI VISUALIZZAZIONE DELLA TEMPERATURA x 6- IMPOSTAZIONE
FLIP 66 ISTRUZIONI PER L'USO Tabella dei contenuti 1- FUNZIONI DELL'APPARECCHIO x 2- MESSA IN FUNZIONE x 3- USO x 4- IMPOSTAZIONE DELL'ORA x 5- MODALITÀ DI VISUALIZZAZIONE DELLA TEMPERATURA x 6- IMPOSTAZIONE
Programmatore serie DIG
 Programmatore serie DIG Manuale d uso e di programmazione grammatore_serie_dig_ita.indd 1 12/07/12 14.4 1.1 INTERFACCIA UTENTE DESCRIZIONE DEL DISPLAY E DELLE ICONE L interfaccia utente della centralina
Programmatore serie DIG Manuale d uso e di programmazione grammatore_serie_dig_ita.indd 1 12/07/12 14.4 1.1 INTERFACCIA UTENTE DESCRIZIONE DEL DISPLAY E DELLE ICONE L interfaccia utente della centralina
Reti Logiche 1. Prof. B. Buttarazzi A.A. 2009/2010. Reti Sequenziali
 Reti Logiche Prof. B. Buttarazzi A.A. 29/2 Reti Sequenziali Sommario Analisi di Reti Sequenziali Sintesi di Reti Sequenziali Esercizi 3/6/2 Corso di Reti Logiche 29/ 2 Analisi di Reti Sequenziali Passare
Reti Logiche Prof. B. Buttarazzi A.A. 29/2 Reti Sequenziali Sommario Analisi di Reti Sequenziali Sintesi di Reti Sequenziali Esercizi 3/6/2 Corso di Reti Logiche 29/ 2 Analisi di Reti Sequenziali Passare
MANUALE UTENTE TELECOMANDO FOCOLARE CHIUSO A GAS
 MANUALE UTENTE TELECOMANDO FOCOLARE CHIUSO A GAS 1 DISPLAY E TASTI DISPLAY TASTO SU TASTO GIU STOP/STAND BY TASTO MENU 2 OPERAZIONE MANUALE TIMER IMPOSTATO IMPOSTAZIONE PERIODO ATTIVA FOCOLARE CHIUSO (SX)
MANUALE UTENTE TELECOMANDO FOCOLARE CHIUSO A GAS 1 DISPLAY E TASTI DISPLAY TASTO SU TASTO GIU STOP/STAND BY TASTO MENU 2 OPERAZIONE MANUALE TIMER IMPOSTATO IMPOSTAZIONE PERIODO ATTIVA FOCOLARE CHIUSO (SX)
Autoritenuta. Il pulsante start accende il motore. Il pulsante stop spegne il motore.
 Autoritenuta Il pulsante start accende il motore. Il pulsante stop spegne il motore. start 0.0 stop 0.1 motore 1.0 L uscita motore mantiene accesa se stessa: autoritenuta. Il contatto motore ècollegato
Autoritenuta Il pulsante start accende il motore. Il pulsante stop spegne il motore. start 0.0 stop 0.1 motore 1.0 L uscita motore mantiene accesa se stessa: autoritenuta. Il contatto motore ècollegato
TeeJet 834 MANUALE OPERATIVO E DI PROGRAMMAZIONE - v Pag 1 di 8
 834 MANUALE 834 TeeJet 834 MANUALE OPERATIVO E DI PROGRAMMAZIONE - v1.02 - Pag 1 di 8 Funzione Azione/i Lettura iniziale Lettura successiva Computer: procedura di accensione Accensione Premere il tasto
834 MANUALE 834 TeeJet 834 MANUALE OPERATIVO E DI PROGRAMMAZIONE - v1.02 - Pag 1 di 8 Funzione Azione/i Lettura iniziale Lettura successiva Computer: procedura di accensione Accensione Premere il tasto
Circuiti Sequenziali & Somma FP
 Circuiti Sequenziali & Somma FP Circuiti Sequenziali : Esercizio 1 Esercizio 1: progettare una rete sequenziale per il controllo di un motore elettrico. La rete riceve in input i segnali relativi a due
Circuiti Sequenziali & Somma FP Circuiti Sequenziali : Esercizio 1 Esercizio 1: progettare una rete sequenziale per il controllo di un motore elettrico. La rete riceve in input i segnali relativi a due
ISTRUZIONI D USO TELECOMANDO AMBIENTIKA ADVANCED / WIRELESS
 ISTRUZIONI D USO TELECOMANDO AMBIENTIKA ADVANCED / WIRELESS RIMOZIONE ETICHETTA PROTETTIVA Per poter utilizzare il telecomando, rimuovere, come illustrato di seguito, l etichetta protettiva. LISTA COMANDI
ISTRUZIONI D USO TELECOMANDO AMBIENTIKA ADVANCED / WIRELESS RIMOZIONE ETICHETTA PROTETTIVA Per poter utilizzare il telecomando, rimuovere, come illustrato di seguito, l etichetta protettiva. LISTA COMANDI
Nastro trasportatore con ribaltamento cassetta.
 Nastro trasportatore con ribaltamento cassetta. Il seguente progetto prevede il controllo di un nastro trasportatore (attraverso un PLC Siemens S71200 o S7-1500 programmato in LAD) in cui è presente un'isola
Nastro trasportatore con ribaltamento cassetta. Il seguente progetto prevede il controllo di un nastro trasportatore (attraverso un PLC Siemens S71200 o S7-1500 programmato in LAD) in cui è presente un'isola
20 Tecnica del sequenziatore
 20 Tecnica del sequenziatore 1. Funzionamento di un sequenziatore logico Fig. 1. Modulo di base per sequenziatore. L uso del sequenziatore pneumatico presenta i seguenti vantaggi: semplicità di progettazione;
20 Tecnica del sequenziatore 1. Funzionamento di un sequenziatore logico Fig. 1. Modulo di base per sequenziatore. L uso del sequenziatore pneumatico presenta i seguenti vantaggi: semplicità di progettazione;
ESAME DI ARCHITETTURA I COMPITO A
 ESAME DI ARCHITETTURA I COMPITO A Esercizio (6 punti) Si consideri l automa di Mealy specificato dalla seguente tabella: S S/ S S S2/ S3/ S2 S2/ S3/ S3 S/ S/ S4 S/ S S5 S2/ S3/ ) Disegnare l automa. 2)
ESAME DI ARCHITETTURA I COMPITO A Esercizio (6 punti) Si consideri l automa di Mealy specificato dalla seguente tabella: S S/ S S S2/ S3/ S2 S2/ S3/ S3 S/ S/ S4 S/ S S5 S2/ S3/ ) Disegnare l automa. 2)
RETI LOGICHE T Ingegneria Informatica. Esercitazione 2 Reti Sequenziali Asincrone
 RETI LOGICHE T Ingegneria Informatica Esercitazione 2 Reti Sequenziali Asincrone Marco Lippi (marco.lippi3@unibo.it) [Parte dei lucidi sono stati realizzati da Samuele Salti] Esercizio Sintesi RSA Si vuole
RETI LOGICHE T Ingegneria Informatica Esercitazione 2 Reti Sequenziali Asincrone Marco Lippi (marco.lippi3@unibo.it) [Parte dei lucidi sono stati realizzati da Samuele Salti] Esercizio Sintesi RSA Si vuole
Multifunzione Vasca (KMV-1) (KMV-1C) (KMV-1CC)
 (KMV-1C) (KMV-1CC)") Multifunzione Vasca (KMV-1) (KMV-1C) (KMV-1CC) (Radio Idro Clean Air/Pulse - Faro) 03/04/2009 pag. 1/9 Caratteristiche Pannello di Comando 4 tasti Vasca: Lampada e/o Ozono o Cromoterapia : Air/Pulse :
Multifunzione Vasca (KMV-1) (KMV-1C) (KMV-1CC) (Radio Idro Clean Air/Pulse - Faro) 03/04/2009 pag. 1/9 Caratteristiche Pannello di Comando 4 tasti Vasca: Lampada e/o Ozono o Cromoterapia : Air/Pulse :
ISTRUZIONI PROGRAMMAZIONE 20446
 ISTRUZIONI PROGRAMMAZIONE 20446 RESET Per impostare il crontermostato elettronico, al fine di operare in un modo comune, eseguire un RESET del dispositivo. Per eseguire il Reset premere contemporaneamente
ISTRUZIONI PROGRAMMAZIONE 20446 RESET Per impostare il crontermostato elettronico, al fine di operare in un modo comune, eseguire un RESET del dispositivo. Per eseguire il Reset premere contemporaneamente
Fase 3: Impostare il giorno della settimana. Fase 4: Impostare l orario di rigenerazione
 Fase 2: Programmare l orario Mentre lampeggia "2:00", impostare l orario corretto. Usare i pulsanti AI e CENDI per scorrere l orario corretto. "PM" è indicato, "AM" no. Premere ET per confermare l orario
Fase 2: Programmare l orario Mentre lampeggia "2:00", impostare l orario corretto. Usare i pulsanti AI e CENDI per scorrere l orario corretto. "PM" è indicato, "AM" no. Premere ET per confermare l orario
Panoramica del progetto DMBoard ICS
 Panoramica del progetto DMBoard ICS Sommario 1. HARDWARE... 1 1.1 Cos è DMBoard ICS... 2 1.2 DMBoard ICS come strumento didattico... 2 2. SOFTWARE... 2 2.1 Cos è DMDesign... 2 2.2 Cos è DMstate... 3 2.3
Panoramica del progetto DMBoard ICS Sommario 1. HARDWARE... 1 1.1 Cos è DMBoard ICS... 2 1.2 DMBoard ICS come strumento didattico... 2 2. SOFTWARE... 2 2.1 Cos è DMDesign... 2 2.2 Cos è DMstate... 3 2.3
Laboratorio di Architettura degli Elaboratori A.A. 2016/17 Circuiti Logici
 Laboratorio di Architettura degli Elaboratori A.A. 2016/17 Circuiti Logici Per ogni lezione, sintetizzare i circuiti combinatori o sequenziali che soddisfino le specifiche date e quindi implementarli e
Laboratorio di Architettura degli Elaboratori A.A. 2016/17 Circuiti Logici Per ogni lezione, sintetizzare i circuiti combinatori o sequenziali che soddisfino le specifiche date e quindi implementarli e
DIP SWITCH 1-4 LED 2 LED 1. SW1 pulsante di programmazione SEQUENZA DI PROGRAMMAZIONE MODALITÀ FUNZIONAMENTO SCHEDA
 MODALITÀ FUNZIONAMENTO SCHEDA SWITCH 1-4 LED 2 LED 1 SW1 pulsante di programmazione Nota: questo è il modo in cui si vedono i con la morsettiera posizionata in alto. Quando il piccolo interruttore bianco
MODALITÀ FUNZIONAMENTO SCHEDA SWITCH 1-4 LED 2 LED 1 SW1 pulsante di programmazione Nota: questo è il modo in cui si vedono i con la morsettiera posizionata in alto. Quando il piccolo interruttore bianco
Corso di Automazione industriale
 Corso di Automazione industriale ezione 4 PC adder Esercizi niversità degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, A. Bombarda 1 Esercizio 1 Si consideri un sistema di trasporto di
Corso di Automazione industriale ezione 4 PC adder Esercizi niversità degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, A. Bombarda 1 Esercizio 1 Si consideri un sistema di trasporto di
Radio Stereo FM. Descrizione Pannello di controllo. A.E.S. Elettronica di Urbani Settimio & C. Snc. 6 tasti: Radio ON/OFF : accende e spegne la Radio
 Radio Stereo FM Descrizione Pannello di controllo 6 tasti: Radio ON/OFF : accende e spegne la Radio Search : attiva la ricerca di un emittente Memory : attiva la memorizzazione dei programmi, a Radio spenta
Radio Stereo FM Descrizione Pannello di controllo 6 tasti: Radio ON/OFF : accende e spegne la Radio Search : attiva la ricerca di un emittente Memory : attiva la memorizzazione dei programmi, a Radio spenta
ISTITUTO OMNICOMPRENSIVO ROSSELLI-RASETTI CASTIGLIONE DEL LAGO Indirizzo Tecnico Tecnologico Settore Meccanica, Meccatronica e Energia
 Pag. 1 Applicazioni dei controlli tramite PLC ISTITUTO OMNICOMPRENSIVO ROSSELLI-RASETTI CASTIGLIONE DEL LAGO 1. Avviamento di un motore asincrono trifase I/0: I/1: I/2: O/0: START STOP T1 K1 2. Inversione
Pag. 1 Applicazioni dei controlli tramite PLC ISTITUTO OMNICOMPRENSIVO ROSSELLI-RASETTI CASTIGLIONE DEL LAGO 1. Avviamento di un motore asincrono trifase I/0: I/1: I/2: O/0: START STOP T1 K1 2. Inversione
MANUALE RAPIDO DI INSTALLAZIONE SISTEMI FLEXA 2.0 CON TERMOSTATI TACTO E BLUEFACE INFORMAZIONI IMPORTANTI
 INFORMAZIONI IMPORTANTI YOUTUBE:Video di utilizzo e configurazione dei sistemi all indirizzo www.youtube.com/airzoneitalia SITO AZIENDALE: www.airzoneitalia.it TIPOLOGIE DI TERMOSTATI I termostati dovranno
INFORMAZIONI IMPORTANTI YOUTUBE:Video di utilizzo e configurazione dei sistemi all indirizzo www.youtube.com/airzoneitalia SITO AZIENDALE: www.airzoneitalia.it TIPOLOGIE DI TERMOSTATI I termostati dovranno
COMANDO DI TRE NASTRI TRASPORTATORI
 COMANDO DI TRE NASTRI TRASPORTATORI Descrizione impianto L impianto è un generico impianto industriale in grado di comandare tre nastri trasportatori azionati rispettivamente dai motori M1, M2 ed M3. Specifiche
COMANDO DI TRE NASTRI TRASPORTATORI Descrizione impianto L impianto è un generico impianto industriale in grado di comandare tre nastri trasportatori azionati rispettivamente dai motori M1, M2 ed M3. Specifiche
Introduzione alla programmazione
 Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
PROGRAMMAZIONE AVANZATA PER POMPE DPZ
 PROGRAMMAZIONE AVANZATA PER POMPE DPZ FRONTALINO COMANDI R 0/4--20 20--0/4 % n:1 1:n 1:c C RS-485 Level Flow Pause STOP Memory Alarm Start Stop Mode AREA DEL DISPLAY icona illuminata significato Level
PROGRAMMAZIONE AVANZATA PER POMPE DPZ FRONTALINO COMANDI R 0/4--20 20--0/4 % n:1 1:n 1:c C RS-485 Level Flow Pause STOP Memory Alarm Start Stop Mode AREA DEL DISPLAY icona illuminata significato Level
ESERCIZI PLC COL LINGUAGGIO BASIC
 ESERCIZI PLC COL LINGUAGGIO BASIC ESERCIZIO 1: il sensore B 1 rileva il livello della AND ghiaia nel silos. Solo se quest ultimo risulta sufficiente e se, contemporaneamente, viene azionato il pulsante
ESERCIZI PLC COL LINGUAGGIO BASIC ESERCIZIO 1: il sensore B 1 rileva il livello della AND ghiaia nel silos. Solo se quest ultimo risulta sufficiente e se, contemporaneamente, viene azionato il pulsante
25 Comandi elettrici d emergenza
 25 Comandi elettrici d emergenza 1. Cicli di un solo attuatore Fig. 1. Comando elettrico d emergenza del ciclo A A con arresto e ritorno immediato in posizione di riposo. Un comando d emergenza si deve
25 Comandi elettrici d emergenza 1. Cicli di un solo attuatore Fig. 1. Comando elettrico d emergenza del ciclo A A con arresto e ritorno immediato in posizione di riposo. Un comando d emergenza si deve
CRONOTERMOSTATO PROGRAMMABILE WCT GUIDA RAPIDA
 CRONOTERMOSTATO PROGRAMMABILE WCT GUIDA RAPIDA PREMESSA Per capire bene il funzionamento del cronotermostato è indispensabile fissare alcuni concetti. Il primo concetto fondamentale è la temperatura, il
CRONOTERMOSTATO PROGRAMMABILE WCT GUIDA RAPIDA PREMESSA Per capire bene il funzionamento del cronotermostato è indispensabile fissare alcuni concetti. Il primo concetto fondamentale è la temperatura, il
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 6 PLC SFC Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, A. Bombarda 1 Esercizio 1 Si consideri un sistema di trasporto di
Corso di Automazione industriale Lezione 6 PLC SFC Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, A. Bombarda 1 Esercizio 1 Si consideri un sistema di trasporto di
Modalità di utilizzo della SFC (sequential function chart) per realizzare i GRAFCET con ALLEN-BRADLEY PLC serie ROCKWELL Automation
 per realizzare i GRAFCET con ALLEN-BRADLEY PLC serie ROCKWELL Automation") Il diagramma funzionale sequenziale o sequential function chart (SFC) è un linguaggio di programmazione grafico per i PLC introdotto e definito dallo standard internazionale IEC 61131-3. Questo linguaggio
Il diagramma funzionale sequenziale o sequential function chart (SFC) è un linguaggio di programmazione grafico per i PLC introdotto e definito dallo standard internazionale IEC 61131-3. Questo linguaggio
SISTEMA PER IL CONTROLLO DEL LIVELLO DEI SERBATOI. MANUALE D USO.
 NAVAL ELECTROTECHNICS Via dei Peecchi, 99 55049 VIAREGGIO (LU) ITALY Phone + 39-0584-390348 Fax +39-0584-385089 E-mail: navelitaly@tin.it WWW.NAVELITALY.COM SISTEMA PER IL CONTROLLO DEL LIVELLO DEI SERBATOI.
NAVAL ELECTROTECHNICS Via dei Peecchi, 99 55049 VIAREGGIO (LU) ITALY Phone + 39-0584-390348 Fax +39-0584-385089 E-mail: navelitaly@tin.it WWW.NAVELITALY.COM SISTEMA PER IL CONTROLLO DEL LIVELLO DEI SERBATOI.
LOGICA SEQUENZIALE. Un blocco di logica puramente combinatoria è un. blocco con N variabili di ingresso e M variabili di uscita
 LOGICA SEQUENZIALE Logica combinatoria Un blocco di logica puramente combinatoria è un blocco con N variabili di ingresso e M variabili di uscita che sono funzione (booleana) degli ingressi in un certo
LOGICA SEQUENZIALE Logica combinatoria Un blocco di logica puramente combinatoria è un blocco con N variabili di ingresso e M variabili di uscita che sono funzione (booleana) degli ingressi in un certo
Definire una chiave primaria. Microsoft Access. Definire una chiave primaria. Definire una chiave primaria. Definire una chiave primaria
 Microsoft Access Chiavi, struttura delle tabelle 1. Portare la tabella in Visualizzazione struttura Selezionare la tabella sulla quale si desidera intervenire nella finestra del database Poi: Fare clic
Microsoft Access Chiavi, struttura delle tabelle 1. Portare la tabella in Visualizzazione struttura Selezionare la tabella sulla quale si desidera intervenire nella finestra del database Poi: Fare clic
Interfaccia contatti Basic
 Interfaccia contatti Basic SCHEDA TECNICA Codice: 377 Descrizione Questo dispositivo consente di integrare apparecchiature di comando di tipo tradizionale (interruttore, pulsante etc.) in sistemi evoluti
Interfaccia contatti Basic SCHEDA TECNICA Codice: 377 Descrizione Questo dispositivo consente di integrare apparecchiature di comando di tipo tradizionale (interruttore, pulsante etc.) in sistemi evoluti
CM701. I Manuale dell utente PO Manual do Utilizador E Guía Del Usuario F Mode d emploi
 OFFMANAUTO CM701 I Manuale dell utente... 2-6 PO Manual do Utilizador... 7-11 E Guía Del Usuario... 12-16 F Mode d emploi... 17-21 D Benutzerhandbuch... 22-26 NL Gebruikershandleiding... 27-31 1 I Descrizione
OFFMANAUTO CM701 I Manuale dell utente... 2-6 PO Manual do Utilizador... 7-11 E Guía Del Usuario... 12-16 F Mode d emploi... 17-21 D Benutzerhandbuch... 22-26 NL Gebruikershandleiding... 27-31 1 I Descrizione
Automazione industriale
 Automazione industriale a.a. 2014-2015 Prof. Luca Ferrarini Ladder Diagram Processo di pulizia e verniciatura (1) In figura è rappresentato un processo industriale per la pulizia e la verniciatura di componenti
Automazione industriale a.a. 2014-2015 Prof. Luca Ferrarini Ladder Diagram Processo di pulizia e verniciatura (1) In figura è rappresentato un processo industriale per la pulizia e la verniciatura di componenti
MANUALE TECNICO Termocamino ad Aria Ventilata 1 Ventilatore LZ027P1. Fig. 1 - Aspetto Esterno. Fig. 2 - Schema di collegamento
 MANUALE TECNICO Termocamino ad Aria Ventilata 1 Ventilatore LZ027P1 Display 7 Segmenti Pulsante ON/OFF Ricevitore Fig. 1 - Aspetto Esterno Fig. 2 - Schema di collegamento Alimentazione 230 Vac ± 10% 50Hz
MANUALE TECNICO Termocamino ad Aria Ventilata 1 Ventilatore LZ027P1 Display 7 Segmenti Pulsante ON/OFF Ricevitore Fig. 1 - Aspetto Esterno Fig. 2 - Schema di collegamento Alimentazione 230 Vac ± 10% 50Hz
Raccolta Test di Laboratorio di Sistemi a Microcontrollore
 Raccolta Test di Laboratorio di Sistemi a Microcontrollore prof. Corrado Santoro 1 Digital I/O 1. Quale delle seguenti istruzioni permette di porre a 0 la linea PC4? GPIOC->ODR &= (int32_t)0x10; GPIOC->ODR
Raccolta Test di Laboratorio di Sistemi a Microcontrollore prof. Corrado Santoro 1 Digital I/O 1. Quale delle seguenti istruzioni permette di porre a 0 la linea PC4? GPIOC->ODR &= (int32_t)0x10; GPIOC->ODR
Scenario: Spegni e chiudi tutto
 IT Italiano SCI-03-101014 Scenario: Spegni e chiudi tutto Storia delle revisioni Rev. Data Revisore Pag. Descrizione Doc. 0 10/10/2014 Versione Iniziale P a g. 2 Introduzione Questo scenario assicura la
IT Italiano SCI-03-101014 Scenario: Spegni e chiudi tutto Storia delle revisioni Rev. Data Revisore Pag. Descrizione Doc. 0 10/10/2014 Versione Iniziale P a g. 2 Introduzione Questo scenario assicura la
APP SECURKEYPAD IPHONE Manuale Edizione 1.0
 APP SECURKEYPAD IPHONE ----------------------- Manuale Edizione 1.0 Securforce Srl email : info@securforce.com web : www.securforce.com Rev. 1.0 del 01/06/2014 Ver. firmware 6.XX Manuale installatore pag.
APP SECURKEYPAD IPHONE ----------------------- Manuale Edizione 1.0 Securforce Srl email : info@securforce.com web : www.securforce.com Rev. 1.0 del 01/06/2014 Ver. firmware 6.XX Manuale installatore pag.
MANUALE DI USO E MANUTENZIONE TERMOSTUFA A PELLET Mod. GEMINI
 MANUALE DI USO E MANUTENZIONE TERMOSTUFA A PELLET Mod. GEMINI centopercento Made in Italy Supplemento al manuale della Termostufa mod. Gemini per il funzionamento a nocciolino Indice I INTRODUZIONE...
MANUALE DI USO E MANUTENZIONE TERMOSTUFA A PELLET Mod. GEMINI centopercento Made in Italy Supplemento al manuale della Termostufa mod. Gemini per il funzionamento a nocciolino Indice I INTRODUZIONE...
Interruttore singolo per comandi ON/OFF Tipo: x, EC 16x x
 SK 0062 B93 L interruttore viene montato su un dispositivo di accoppiamento bus o su un dispositivo ON/OFF per tapparelle SA/U 1.1. Il singolo pulsante può inviare comandi di commutazione, regolazione
SK 0062 B93 L interruttore viene montato su un dispositivo di accoppiamento bus o su un dispositivo ON/OFF per tapparelle SA/U 1.1. Il singolo pulsante può inviare comandi di commutazione, regolazione
Scheda delle funzioni SWCA (System-wide Call Appearance)
") Scheda delle funzioni SWCA (System-wide Call Appearance) N. parte N0069071 Novembre 2005 Informazioni sui tasti SWCA (System-wide Call Appearance) Linea 1 Linea 2 SWCA1 SWCA2 SWCA3 Utilizzare la funzione
Scheda delle funzioni SWCA (System-wide Call Appearance) N. parte N0069071 Novembre 2005 Informazioni sui tasti SWCA (System-wide Call Appearance) Linea 1 Linea 2 SWCA1 SWCA2 SWCA3 Utilizzare la funzione
MANUALE D'USO SINTETICO
 MANUALE D'USO SINTETICO ABBATTITORI GASTRONOMIA 5 / 10 / 15 TEGLIE GN/600 X 400 La seguente tabella illustra il significato dei tasti e di alcune parti della scheda di controllo: Parte Significato 1 Display
MANUALE D'USO SINTETICO ABBATTITORI GASTRONOMIA 5 / 10 / 15 TEGLIE GN/600 X 400 La seguente tabella illustra il significato dei tasti e di alcune parti della scheda di controllo: Parte Significato 1 Display
Controller 2308 Martin Manuale d uso
 PROFESSIONAL ITALY SPA Controller 2308 Martin Manuale d uso Operazioni primarie: Settaggio proiettori Verificare per prima cosa il numero di canale Rs485 MARTIN assegnato a ciascuno dei proiettori collegati
PROFESSIONAL ITALY SPA Controller 2308 Martin Manuale d uso Operazioni primarie: Settaggio proiettori Verificare per prima cosa il numero di canale Rs485 MARTIN assegnato a ciascuno dei proiettori collegati
academy lez. 9 controllo carichi - Il controllo carichi Parte 2
 Il controllo carichi Parte 2 1 2 Controllo carichi dislocato. Nella realtà sarebbe però bello avere un controllo carichi del tipo dislocato, ovvero non essere obbligati a collegare fisicamente i punti
Il controllo carichi Parte 2 1 2 Controllo carichi dislocato. Nella realtà sarebbe però bello avere un controllo carichi del tipo dislocato, ovvero non essere obbligati a collegare fisicamente i punti
Progetti. Alessandro Danese, Graziano Pravadelli (2017) 1
 1") Progetti Alessandro Danese, Graziano Pravadelli (2017) 1 Prog. 1: Contatore di persone Realizzare un circuito che usa il sensore di luminosità per contare quante persone accedono a una stanza Il numero
Progetti Alessandro Danese, Graziano Pravadelli (2017) 1 Prog. 1: Contatore di persone Realizzare un circuito che usa il sensore di luminosità per contare quante persone accedono a una stanza Il numero
Automazione. 4 Aprile 2016
 Automazione 4 Aprile 2016 Esercizio 1 Si consideri un sistema di automazione in cui, a livello di coordinamento, sia necessario portare a termine tre tipi di task periodici inerenti i componenti trasportati
Automazione 4 Aprile 2016 Esercizio 1 Si consideri un sistema di automazione in cui, a livello di coordinamento, sia necessario portare a termine tre tipi di task periodici inerenti i componenti trasportati
MANUALE DI INSTALLAZIONE E PROGRAMMAZIONE
 Modello SCALER Firmware ver. 1.0.0 MANUALE DI INSTALLAZIONE E PROGRAMMAZIONE BENVENUTI Grazie per aver acquistato una centralina luci RAPTOR! Questo controller unisce le sue ridotte dimensioni a una versatilità
Modello SCALER Firmware ver. 1.0.0 MANUALE DI INSTALLAZIONE E PROGRAMMAZIONE BENVENUTI Grazie per aver acquistato una centralina luci RAPTOR! Questo controller unisce le sue ridotte dimensioni a una versatilità
Modifica delle impostazioni della stampante 1
 Modifica delle impostazioni della stampante 1 Molte impostazioni della stampante possono essere modificate tramite l'applicazione software utilizzata, il driver per stampante Lexmark, il pannello operatore
Modifica delle impostazioni della stampante 1 Molte impostazioni della stampante possono essere modificate tramite l'applicazione software utilizzata, il driver per stampante Lexmark, il pannello operatore
K-19. Funzioni della vasca idromassaggio
 K-19 Sistema con due pompe Sistema con una pompa La Scheda di riferimento rapido fornisce una veloce panoramica sulle funzioni principali della vasca idromassaggio e sulle operazioni che si possono effettuare
K-19 Sistema con due pompe Sistema con una pompa La Scheda di riferimento rapido fornisce una veloce panoramica sulle funzioni principali della vasca idromassaggio e sulle operazioni che si possono effettuare
AUTOCLAVE Modello BABY S
 AZIENDA CON SISTEMA QUALITÀ CERTIFICATO UNI EN ISO 9001 & EN 13485 SETTORE DISPOSITIVI MEDICI Via Don L. Sturzo,6 42021 Barco (RE) (ITALY) Codice Fiscale e Partita IVA: IT 01363800358 Numero REA: 180051
AZIENDA CON SISTEMA QUALITÀ CERTIFICATO UNI EN ISO 9001 & EN 13485 SETTORE DISPOSITIVI MEDICI Via Don L. Sturzo,6 42021 Barco (RE) (ITALY) Codice Fiscale e Partita IVA: IT 01363800358 Numero REA: 180051
SFC. Sequential Functional Chart. Reti e Sistemi per l Automazione. Stefano Panzieri SFC - 1
 SFC Sequential Functional Chart Stefano Panzieri SFC - 1 Sequential Functional Chart Nel 1975 nasce il GRAFCET GRAPHe de Coordination Etapes Transitions Nel 1987 è stato adottato come standard internazionale
SFC Sequential Functional Chart Stefano Panzieri SFC - 1 Sequential Functional Chart Nel 1975 nasce il GRAFCET GRAPHe de Coordination Etapes Transitions Nel 1987 è stato adottato come standard internazionale
Dimensioni foratura pannello
 Tensione di alimentazione Consumo Dimensioni contenitore Dimensioni foratura pannello 12 40Vdc 9 30Vac 5VA max 144x72x80mm 138x68mm Tasto HELP Viene utilizzato per uscire dalle schermate Tasto ENT Viene
Tensione di alimentazione Consumo Dimensioni contenitore Dimensioni foratura pannello 12 40Vdc 9 30Vac 5VA max 144x72x80mm 138x68mm Tasto HELP Viene utilizzato per uscire dalle schermate Tasto ENT Viene
I Istruzioni di comando Sistema di comando per apparecchi di illuminazione. PULSE HFMD Vers. III
 Istruzioni di comando Sistema di comando per apparecchi di illuminazione PULSE HFMD Vers. III Gentilissimo Cliente! Oltre alle istruzioni per l uso dell apparecchio, vanno osservate anche le presenti istruzioni.
Istruzioni di comando Sistema di comando per apparecchi di illuminazione PULSE HFMD Vers. III Gentilissimo Cliente! Oltre alle istruzioni per l uso dell apparecchio, vanno osservate anche le presenti istruzioni.
Manuale d uso aggiuntivo
 IT Manuale d uso aggiuntivo Telecomando per stufe caminetto a gas (con sensore di temperatura) ORANIER Heiz- u. Kochtechnik GMBH - D-35075 Gladenbach tel.: (06462) 923-0 fax.: (06462) 923-349 Internet:
IT Manuale d uso aggiuntivo Telecomando per stufe caminetto a gas (con sensore di temperatura) ORANIER Heiz- u. Kochtechnik GMBH - D-35075 Gladenbach tel.: (06462) 923-0 fax.: (06462) 923-349 Internet:
Manuale del Termostato TACTO. v 2
 Manuale del Termostato TACTO v 2 Indice 1 Tipi di termostati (Maestro & Zona).... 2 2 Tasti e icone del termostato... 3 3 Modi di funzionamento.... 4 3.1 Descrizione dei modi di funzionamento... 4 STOP...
Manuale del Termostato TACTO v 2 Indice 1 Tipi di termostati (Maestro & Zona).... 2 2 Tasti e icone del termostato... 3 3 Modi di funzionamento.... 4 3.1 Descrizione dei modi di funzionamento... 4 STOP...
ISTRUZIONI D USO SISTEMA DI CONTROLLO ABBATTITORI PLUS DI MACCHEF-
 ISTRUZIONI D USO SISTEMA DI CONTROLLO ABBATTITORI PLUS DI MACCHEF- INDICE - Pag.2 Applicazione abbattitore - Pag.3 Spie controllo - Pag.4 Pulsanti di funzione Home - Pag.5 Programmi - Pag.10 Haccp Istruzioni
ISTRUZIONI D USO SISTEMA DI CONTROLLO ABBATTITORI PLUS DI MACCHEF- INDICE - Pag.2 Applicazione abbattitore - Pag.3 Spie controllo - Pag.4 Pulsanti di funzione Home - Pag.5 Programmi - Pag.10 Haccp Istruzioni
Manuale d utilizzo della Rendiresto
 Manuale d utilizzo della Rendiresto Realizzato da: Via G. Watt, 37 20143 MILANO Tel. 02 89121800/4 Fax 02 89124990 La rendiresto Coinco è predisposta di un sistema di autodiagnostica. Gli errori possono
Manuale d utilizzo della Rendiresto Realizzato da: Via G. Watt, 37 20143 MILANO Tel. 02 89121800/4 Fax 02 89124990 La rendiresto Coinco è predisposta di un sistema di autodiagnostica. Gli errori possono
VELA-RX MOTORE 220V 500W
 VELA-RX MOTORE 220V 500W Centrale elettronica con funzioni UP, DOWN e STOP per la gestione via filo e/o via radio di motori 230V, max 500W 1 INDICE 1 - CARATTERISTICHE DEL PRODOTTO 1.1 - DATI TECNICI 1.2
VELA-RX MOTORE 220V 500W Centrale elettronica con funzioni UP, DOWN e STOP per la gestione via filo e/o via radio di motori 230V, max 500W 1 INDICE 1 - CARATTERISTICHE DEL PRODOTTO 1.1 - DATI TECNICI 1.2
Rhino VE Scheda operatore dello scaricatore CE - Italian -
 Rhino VE Scheda operatore dello scaricatore CE - Italian - Posizione dei componenti Vedi figura 1 e fare riferimento alla tabella 1. ILLUSTRATO IN POSIZIONE APERTA 1 3 8 4 7 6 5 Figura 1 Elemento Reperimento
Rhino VE Scheda operatore dello scaricatore CE - Italian - Posizione dei componenti Vedi figura 1 e fare riferimento alla tabella 1. ILLUSTRATO IN POSIZIONE APERTA 1 3 8 4 7 6 5 Figura 1 Elemento Reperimento
Esercizio 1 (12 punti) Minimizzare il numero di stati dell automa qui rappresentato. Disegnare l automa minimo.
 Minimizzare il numero di stati dell automa qui rappresentato. Disegnare l automa minimo.") Compito A Esercizio (2 punti) Minimizzare il numero di stati dell automa qui rappresentato. Disegnare l automa minimo. S / S 2 / S 3 / S 4 / S 5 / Esercizio 2 (5 punti) Progettare un circuito il cui output
Compito A Esercizio (2 punti) Minimizzare il numero di stati dell automa qui rappresentato. Disegnare l automa minimo. S / S 2 / S 3 / S 4 / S 5 / Esercizio 2 (5 punti) Progettare un circuito il cui output
Riassumendo quello che già è stato descritto precedentemente, possiamo dire che:
 ORSO SE PL 1.12 PL e logiche a Relais: il linguaggio ladder. Riassumendo quello che già è stato descritto precedentemente, possiamo dire che: I Relè gestiscono sensori e attuatori binari Gli ingressi di
ORSO SE PL 1.12 PL e logiche a Relais: il linguaggio ladder. Riassumendo quello che già è stato descritto precedentemente, possiamo dire che: I Relè gestiscono sensori e attuatori binari Gli ingressi di
AUTOCLAVE Modello BABY S
 SETTORE DISPOSITIVI MEDICI Via Don L. Sturzo,6 42021 Barco (RE) (ITALY) Codice Fiscale e Partita IVA: IT 01363800358 Numero REA: 180051 C.C.I.A.A. di Reggio Emilia Tel. 0039 (0) 522 875159 Fax 0039 (0)
SETTORE DISPOSITIVI MEDICI Via Don L. Sturzo,6 42021 Barco (RE) (ITALY) Codice Fiscale e Partita IVA: IT 01363800358 Numero REA: 180051 C.C.I.A.A. di Reggio Emilia Tel. 0039 (0) 522 875159 Fax 0039 (0)
CENTRALE DI RIVELAZIONE E SPEGNIMENTO INCENDI EUROPA CF4E-S MANUALE UTENTE. Dicembre 2003 REV 1
 CENTRALE DI RIVELAZIONE E SPEGNIMENTO INCENDI EUROPA CF4E-S MANUALE UTENTE Dicembre 2003 REV 1 CONTENUTO: CAP....PAG. 1- PANNELLO DI GESTIONE (PANNELLO BASE 4 ZONE DI SOLA RIV.)... 2 1-1 SEGNALAZIONI DEL
CENTRALE DI RIVELAZIONE E SPEGNIMENTO INCENDI EUROPA CF4E-S MANUALE UTENTE Dicembre 2003 REV 1 CONTENUTO: CAP....PAG. 1- PANNELLO DI GESTIONE (PANNELLO BASE 4 ZONE DI SOLA RIV.)... 2 1-1 SEGNALAZIONI DEL
Manuale di istruzioni Electraline Timer Digitale Settimanale
 Manuale di istruzioni Electraline 58107 Timer Digitale Settimanale A. Funzioni 1. Il programmatore Digitale Settimanale (di seguito chiamato timer ), può essere programmato per specifiche funzioni di ON/OFF
Manuale di istruzioni Electraline 58107 Timer Digitale Settimanale A. Funzioni 1. Il programmatore Digitale Settimanale (di seguito chiamato timer ), può essere programmato per specifiche funzioni di ON/OFF
Reti Logiche T. Esercizi reti sequenziali sincrone
 Reti Logiche T Esercizi reti sequenziali sincrone ESERCIZIO N. Si esegua la sintesi di una rete sequenziale sincrona caratterizzata da un unico segnale di ingresso (X) e da un unico segnale di uscita (Z),
Reti Logiche T Esercizi reti sequenziali sincrone ESERCIZIO N. Si esegua la sintesi di una rete sequenziale sincrona caratterizzata da un unico segnale di ingresso (X) e da un unico segnale di uscita (Z),
Impariamo a programmare con Scratch. Lezione 3: Proviamo a muoverci da soli
 Impariamo a programmare con Scratch Lezione 3: Proviamo a muoverci da soli Cosa abbiamo visto fino a oggi... Scratch è un LINGUAGGIO DI PROGRAMMAZIONE Linguaggio di Programmazione: In informatica, insieme
Impariamo a programmare con Scratch Lezione 3: Proviamo a muoverci da soli Cosa abbiamo visto fino a oggi... Scratch è un LINGUAGGIO DI PROGRAMMAZIONE Linguaggio di Programmazione: In informatica, insieme
FLIP 99 ISTRUZIONI PER L'USO
 FLIP 99 ISTRUZIONI PER L'USO INDICE 1- FUNZIONI DELL'APPARECCHIO x 2- MESSA IN FUNZIONE x 3- USO x 4- IMPOSTAZIONE DELL'ORA x 5- IMPOSTAZIONE DELLA DATA x 7- IMPOSTAZIONE DEL TIMER x 8- MODALITÀ DI VISUALIZZAZIONE
FLIP 99 ISTRUZIONI PER L'USO INDICE 1- FUNZIONI DELL'APPARECCHIO x 2- MESSA IN FUNZIONE x 3- USO x 4- IMPOSTAZIONE DELL'ORA x 5- IMPOSTAZIONE DELLA DATA x 7- IMPOSTAZIONE DEL TIMER x 8- MODALITÀ DI VISUALIZZAZIONE
RETI LOGICHE T Ingegneria Informatica. Esercitazione 3 Reti Sequenziali Sincrone
 RETI LOGICHE T Ingegneria Informatica Esercitazione 3 Reti Sequenziali Sincrone Marco Lippi (marco.lippi3@unibo.it) [Lucidi realizzati da Samuele Salti] Esercizio Sintesi RSS Si vuole progettare una rete
RETI LOGICHE T Ingegneria Informatica Esercitazione 3 Reti Sequenziali Sincrone Marco Lippi (marco.lippi3@unibo.it) [Lucidi realizzati da Samuele Salti] Esercizio Sintesi RSS Si vuole progettare una rete
OPERATING INSTRUCTIONs ISTRUZIONI D USO. MODE d EMPLOI
 OPERATING INSTRUCTIONs ISTRUZIONI D USO MODE d EMPLOI EN FR Control panel for air to water Inverter heat pump Pannello di controllo per pompa di calore Inverter aria / acqua Panneau de contrôle pour pompe
OPERATING INSTRUCTIONs ISTRUZIONI D USO MODE d EMPLOI EN FR Control panel for air to water Inverter heat pump Pannello di controllo per pompa di calore Inverter aria / acqua Panneau de contrôle pour pompe
SIMULATORE DI PARCHEGGIO A DUE ZONE DL 2120RM. Laboratorio di Automazione
 SIMULATORE DI PARCHEGGIO A DUE ZONE DL 2120RM Laboratorio di Automazione DL 2120RM Descrizione del modulo DL 2120RM Il modulo DL 2120RM è un unità didattica che riproduce in scala ridotta un parcheggio
SIMULATORE DI PARCHEGGIO A DUE ZONE DL 2120RM Laboratorio di Automazione DL 2120RM Descrizione del modulo DL 2120RM Il modulo DL 2120RM è un unità didattica che riproduce in scala ridotta un parcheggio
INFORMATICA MODULO DI CALCOLATORI ELETTRONICI LAUREA IN INGEGNERIA INFORMATICA
 Esercizio 001-17-18 Un sistema basato sul microprocessore MIPS R2000 (clock pari a 250 MHz) è incaricato della trasmissione seriale asincrona di una serie di caratteri ASCII memorizzati in un banco dell
Esercizio 001-17-18 Un sistema basato sul microprocessore MIPS R2000 (clock pari a 250 MHz) è incaricato della trasmissione seriale asincrona di una serie di caratteri ASCII memorizzati in un banco dell
POSIZIONATORE PROGRAMMABILE MONOASSE PRG 910A
 POSIZIONATORE PROGRAMMABILE MONOASSE PRG 910A MANUALE USO E PROGRAMMAZIONE SOFTWARE TIPO 0101 HARDWARE TIPO A01 FRONTALE POSIZIONATORE PRG 910A DISPLAY DELLA POSIZIONE E DEL CONTEGGIO DEGLI EVENTI PRG
POSIZIONATORE PROGRAMMABILE MONOASSE PRG 910A MANUALE USO E PROGRAMMAZIONE SOFTWARE TIPO 0101 HARDWARE TIPO A01 FRONTALE POSIZIONATORE PRG 910A DISPLAY DELLA POSIZIONE E DEL CONTEGGIO DEGLI EVENTI PRG
Programmatore Serie LED 100 VR
 Programmatore Serie LED 100 VR Manuale d uso e di programmazione Grazie per aver scelto il programmatore Rpe serie LED a batteria. Il programmatore serie LED è dotato della tecnologia di programmazione
Programmatore Serie LED 100 VR Manuale d uso e di programmazione Grazie per aver scelto il programmatore Rpe serie LED a batteria. Il programmatore serie LED è dotato della tecnologia di programmazione
Tecnica basata su Relazioni I/O Circuito di Clock
 SIMULAZIONE: Tecnica basata su Relazioni I/O Visualizzare nel SIMATIC Manager l «online» Carichiamo OB1 utilizzando uno dei 3 modi: A drag & drop dall offline all online B Menu «Sistema di destinazione»
SIMULAZIONE: Tecnica basata su Relazioni I/O Visualizzare nel SIMATIC Manager l «online» Carichiamo OB1 utilizzando uno dei 3 modi: A drag & drop dall offline all online B Menu «Sistema di destinazione»
Contatore avanti-indietro Modulo 4
 Contatore avanti-indietro Modulo 4 Un contatore avanti-indietro modulo 4 è un dispositivo a due uscite, che genera su queste la sequenza dei numeri binari da 0 a 4 cioè: 00->01->10->11 Il sistema dispone
Contatore avanti-indietro Modulo 4 Un contatore avanti-indietro modulo 4 è un dispositivo a due uscite, che genera su queste la sequenza dei numeri binari da 0 a 4 cioè: 00->01->10->11 Il sistema dispone
SPA-ITALIA.COM ISTRUZIONI PER LA PROGRAMMAZIONE
 1. Schema tastiera SPA-ITALIA.COM ISTRUZIONI PER LA PROGRMAZIONE Fig.1: schema pulsantiera vasca idromassaggio grande 1. Light Therapy : Luce fondovasca 2. FM/CD : Radio & CD Ingresso Acceso/Spento 9.
1. Schema tastiera SPA-ITALIA.COM ISTRUZIONI PER LA PROGRMAZIONE Fig.1: schema pulsantiera vasca idromassaggio grande 1. Light Therapy : Luce fondovasca 2. FM/CD : Radio & CD Ingresso Acceso/Spento 9.
2. Algoritmi e Programmi
 12 2. Algoritmi e Programmi Dato un problema, per arrivare ad un programma che lo risolva dobbiamo: individuare di cosa dispongo: gli input; definire cosa voglio ottenere: gli output; trovare un metodo
12 2. Algoritmi e Programmi Dato un problema, per arrivare ad un programma che lo risolva dobbiamo: individuare di cosa dispongo: gli input; definire cosa voglio ottenere: gli output; trovare un metodo
Manuale per il tecnico AUTOCLAVE Modello PRATIKA
 SETTORE DISPOSITIVI MEDICI Via Don L. Sturzo,6 42021 Barco (RE) (ITALY) Codice Fiscale e Partita IVA: IT 01363800358 Numero REA: 180051 C.C.I.A.A. di Reggio Emilia Tel. 0039 (0) 522 875159 Fax 0039 (0)
SETTORE DISPOSITIVI MEDICI Via Don L. Sturzo,6 42021 Barco (RE) (ITALY) Codice Fiscale e Partita IVA: IT 01363800358 Numero REA: 180051 C.C.I.A.A. di Reggio Emilia Tel. 0039 (0) 522 875159 Fax 0039 (0)
Manuale del programma PROGPAR. Per comandare la scheda relè connessa alla porta pa... Page 1 of 5
 Manuale del programma PROGPAR. Per comandare la scheda relè connessa alla porta pa... Page 1 of 5 Piccolo manuale per l' installazione e l' uso del programma PROGPAR. Questo software viene usato per programmare
Manuale del programma PROGPAR. Per comandare la scheda relè connessa alla porta pa... Page 1 of 5 Piccolo manuale per l' installazione e l' uso del programma PROGPAR. Questo software viene usato per programmare
PROGRAMMAZIONE CRONOTERMOSTATO 01910
 PROGRAMMAZIONE CRONOTERMOSTATO 01910 4 1 2 3 5 6 7 8 9 10 11 REGOLAZIONE DATA E ORA Prima di iniziare la programmazione, conviene programmare inizialmente il giorno e l ora corrente: Premere il tasto con
PROGRAMMAZIONE CRONOTERMOSTATO 01910 4 1 2 3 5 6 7 8 9 10 11 REGOLAZIONE DATA E ORA Prima di iniziare la programmazione, conviene programmare inizialmente il giorno e l ora corrente: Premere il tasto con
Un semplice multivibratore astabile si può realizzare con le porte logiche, come nel seguente circuito:
 Pagina 1 di 8 MULTIVIBRATORI Si dice multivibratore un circuito in grado di generare in uscita una forma d'onda di tipo rettangolare. Vi sono tre tipi di multivibratori. Multivibratore monostabile, multivibratore
Pagina 1 di 8 MULTIVIBRATORI Si dice multivibratore un circuito in grado di generare in uscita una forma d'onda di tipo rettangolare. Vi sono tre tipi di multivibratori. Multivibratore monostabile, multivibratore
AUTOMAZIONE INDUSTRIALE. 16 dicembre Cognome Nome Matricola Corso integrato
 AUTOMAZIONE INDUSTRIALE 16 dicembre 16 Cognome Nome Matricola Corso integrato SI NO Verificare che il fascicolo sia costituito da 6 pagine. Scrivere le risposte negli appositi spazi sotto ogni domanda.
AUTOMAZIONE INDUSTRIALE 16 dicembre 16 Cognome Nome Matricola Corso integrato SI NO Verificare che il fascicolo sia costituito da 6 pagine. Scrivere le risposte negli appositi spazi sotto ogni domanda.
Uso del pannello operatore
 Questa sezione fornisce informazioni sul pannello operatore della stampante, sulla modifica delle impostazioni e sui menu del pannello operatore. È possibile modificare la maggior parte delle impostazioni
Questa sezione fornisce informazioni sul pannello operatore della stampante, sulla modifica delle impostazioni e sui menu del pannello operatore. È possibile modificare la maggior parte delle impostazioni
Configurazione dei Dispositivi di Controllo della domotica con l'applicazione di monitoraggio
 Dicembre 2016 Configurazione dei Dispositivi di Controllo della domotica con l'applicazione di monitoraggio Indice Configurazione dei Dispositivi di Controllo della domotica con l'applicazione di monitoraggio
Dicembre 2016 Configurazione dei Dispositivi di Controllo della domotica con l'applicazione di monitoraggio Indice Configurazione dei Dispositivi di Controllo della domotica con l'applicazione di monitoraggio
Istituto d Istruzione Secondaria Superiore M.BARTOLO. A cura del Prof S. Giannitto
 Istituto d Istruzione Secondaria Superiore M.BARTOLO PACHINO (SR) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO I SISTEMI DI CONTROLLO A cura del Prof S. Giannitto SISTEMI DI CONTROLLO Cosa si intende per sistema
Istituto d Istruzione Secondaria Superiore M.BARTOLO PACHINO (SR) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO I SISTEMI DI CONTROLLO A cura del Prof S. Giannitto SISTEMI DI CONTROLLO Cosa si intende per sistema