Università ità degli Studi di Brescia
|
|
|
- Eloisa Fusco
- 6 anni fa
- Visualizzazioni
Transcript




1 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Automazione Industriale per Applicazioni Speciali Curriculum: Robotica e Automazione Industriale Coordinatore: Prof. Giovanni Legnani Tutore: Prof. Rodolfo Faglia Dottoranda: Cinzia Amici ersità ità degli Studi di Bre ltà di Ingeg Dip Ingeg Meccanica e Industriale
2 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 2 Ingeg Meccanica e Industriale
3 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 3 Ingeg Meccanica e Industriale
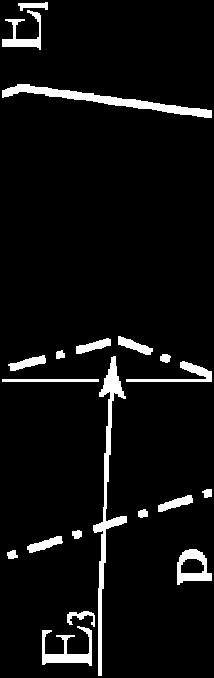
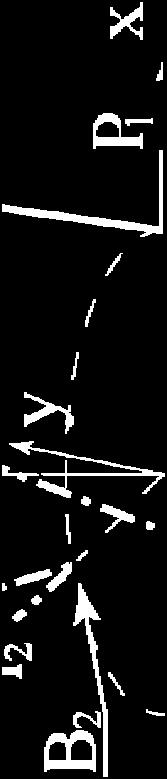
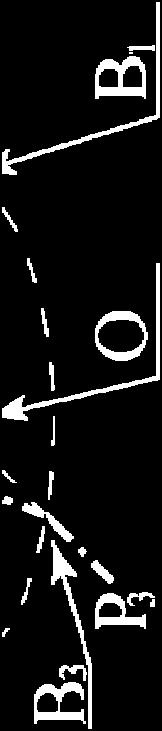
4 Industriale Meccanica e I Ingeg M Analisi Cinematica Diretta e Inversa Analisi Dinamica Inversa Spazio di Lavoro Configurazioni Singolari Attività i principali i lidi ricerca Mini-manipolatori: Analisi cinematica e dinamica di robot flessibile (cerniere flessionali), ad architettura parallela; l Realizzazione di prototipi non funzionali della struttura, in ABS. 4

5 Attività i principali i lidi ricerca Industriale Meccanica e I Ingeg M Leggi di moto agli attuatori: Acc. Costante t Acc. Trapezia con disturbo casuale [N,s] Modelli delle cerniere flessionali: [N,s] Modello 1 Modello 2 [N,s] [N,s] Andamento delle forze esterne: Costanti In funzione del tempo Mini-manipolatori: Analisi cinematica e dinamica di robot flessibile (cerniere flessionali), ad architettura parallela; l Realizzazione di prototipi non funzionali della struttura, in ABS. [N,s] [N,s] 5
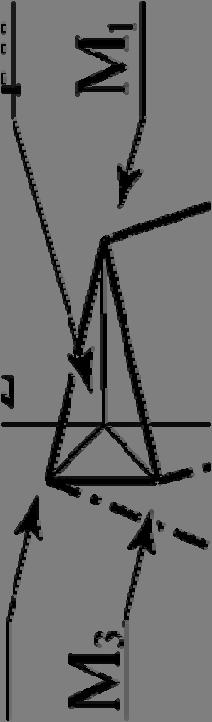
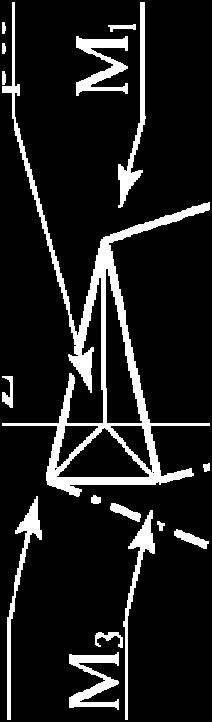
6 Industriale Meccanica e I Ingeg M Leggi di moto: Accelerazione costante Accelerazione trapezia Accelerazione trapezia con disturbo casuale Forze Esterne: Costanti Random in funzione del tempo Modelli di Cerniera Flessionale: Tipologia l i 1 Attività i principali i lidi ricerca Mini-manipolatori: Analisi cinematica e dinamica di robot flessibile (cerniere flessionali), ad architettura parallela; l Realizzazione di prototipi non funzionali della struttura, in ABS. Tipologia 2 6
7 Attività i principali i lidi ricerca Industriale Meccanica e I Ingeg M Mini-manipolatori: Analisi cinematica e dinamica di robot flessibile (cerniere flessionali), ad architettura parallela; l Realizzazione di prototipi non funzionali della struttura, in ABS. 7
8 Attività i principali i lidi ricerca Biomeccatronica (Progettazione e realizzazione di una spalla biomeccanica): Studio del complesso articolare della spalla; Industriale Meccanica e I Ingeg M Identificazione di un modello adatto a simulare cinematica e dinamica del complesso articolare. 8
9 Attività i principali i lidi ricerca Biomeccatronica (Progettazione e realizzazione di una spalla biomeccanica): Studio del complesso articolare della spalla; Industriale Meccanica e I Ingeg M Identificazione di un modello adatto a simulare cinematica e dinamica del complesso articolare. 9
10 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 10 Ingeg Meccanica e Industriale
11 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 11 Ingeg Meccanica e Industriale
12 Partecipazione a corsi, convegni e seminari: Attività i secondarie di ricerca Industriale Meccanica e I Ingeg M Esperienze e prospettive di Biomeccanica presso la ltà di Ingeg dell ersità di Bre : giornata di studio, Uni Studi di Bre, ltà di Ingeg, Bre, 30 Novembre Maple11BaseeMaple p 11 Advanced : corso,, Uni Studi di Bre, ltà di Ingeg, Bre, 6 e 7 Marzo Pro/ENGINEER (Pro/E) versione Wildfire 3.0 : corso, Uni Studi di Bre, ltà di Ingeg, Bre, 17, 18, 19, 20 e 21 Marzo Smart Sensors Systems Design : seminario, Uni Studi di Bre, ltà di Ingeg, Bre, 8 Aprile Programmazione fuori linea : convegno SIRI con mostra di affiancamento, ltà di Ingeg, Modena, 10 Aprile 2008 Corso nazionale automazione e robotica 2008 : corso SIRI, ltà di Ingeg, Bergamo, 21,2828 Maggio e 4, 18, 25 Giugno
13 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 13 Ingeg Meccanica e Industriale
14 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 14 Ingeg Meccanica e Industriale
15 Collaborazioni i e progetti Industriale Meccanica e I Ingeg M Collaborazione didattica nell ambito del settore disciplinare di meccanica applicata alle macchine (esercitazioni frontali, supporto alla stesura e alla correzione di elaborati). Collaborazione al corso di Biomeccanica, nell ambito del Corso di Laurea Specialistica in Ingeg dell Automazione Industriale. Correlazione alla tesi Analisi e valutazione di un modello cinematico del complesso articolare della spalla per il calcolo dello spazio di lavoro del braccio, C.A. Seneci, Laurea di I livello in Ingeg dell Automazione Industriale, Settembre Partecipazione al progetto Biorobot in collaborazione con il Dip Ingeg Meccanica e Industriale, ersità degli Studi di Bre, ltà di Ingeg. 15
16 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 16 Ingeg Meccanica e Industriale
17 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 17 Ingeg Meccanica e Industriale
18 Pubblicazioni i i Industriale Meccanica e I Ingeg M Partecipazione i al convegno EUCOMES 2008 (Cassino) C. Amici, A. Borboni, P. L. Magnani, D. Pomi, Kinematic Analysis of a Compliant, Parallel and Three-Dimensional Meso-Manipulator Generated from a Planar Structure, EUCOMES 2008, Cassino 17, 18 e 19 Settembre C. Amici, i A. Borboni, P. L. Magnani, D. Pomi, Dynamic Analysis of a Compliant, Parallel and Three-Dimensional Meso-Manipulator Generated from a Planar Structure EUCOMES 2008, Cassino 17, 18 e 19 Settembre Partecipazione al convegno IROS 2008 (Nizza) C. Amici, A. Borboni, R. Faglia, D. Fausti, P. L. Magnani, A Parallel Compliant Meso-ManipulatorManipulator for Finger Rehabilitation: Kinematic and Dynamic Analysis, IROS 2008, Nizza, 22, 23, 24, 25 e 26 Settembre
19 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 19 Ingeg Meccanica e Industriale
20 Struttura della presentazione Attività principali di ricerca Attività collaterali di ricerca Collaborazioni e progetti Pubblicazioni Sviluppi futuri 20 Ingeg Meccanica e Industriale
21 Sviluppi if futuri Mini-manipolatori i i i Industriale Meccanica e I Ingeg M Identificazione del materiale più adatto per la realizzazione di minimanipolatori ottimizzati; Individuazione di settori applicativi del robot a livello industriale: ambito medico fisioterapia e riabilitazione, limitatamente a specifiche applicazioni di nicchia (ausilio alla movimentazione- riabilitazione di singole dita) ambito industriale settori caratterizzati da prestazioni dinamiche spinte, elevate velocità di realizzazione Prospettiva di una produzione low-cost : realizzazione dal piano 21
22 Sviluppi if futuri Biomeccatronica i Industriale Meccanica e I Ingeg M settore medico e biomeccanico definizione di diagnosi o percorsi riabilitativi ad hoc per il paziente mediante una corretta modellizzazione del complesso articolare della spalla; ambito bioingegneristico interazione e fusione di meccanica, elettronica e sensoristica avanzata. Prospettive future: Nel successivo anno di corso si prevede di ampliare gli argomenti di interesse, in particolar modo dal punto di vista della ricerca avanzata, sempre senza trascurare possibili casi applicativi; non si esclude tuttavia di focalizzare l attenzione su uno specifico settore di ricerca qualora emergano elementi di particolare rilievo. 22


23 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Automazione Industriale per Applicazioni Speciali Curriculum: Robotica e Automazione Industriale Dottoranda: Cinzia Amici Coordinatore: Tutore: Prof. Giovanni Legnani Prof. Rodolfo Faglia Uni Studi di Bre ltà di Ingeg Dip Ingeg Meccanica e Industriale










24 Convenzioni i e Dati id delle Simulazioni i i 24 Ingeg Meccanica e Industriale
25 Convenzioni i e Dati id delle Simulazioni i i Lunghezza aste 0.05 m Larghezza aste m Industriale Meccanica e I Ingeg M Geometria Proprietà tàdel materiale (PTFE) Spessore aste m AB e BC di ogni gruppo 0.03 m PB di ogni gruppo 0.02 m Mptt di ogni gruppo 0.04 m Distanza tra piede e origine sistema di riferimento fisso 0.07 m Modulo di Young 0.3 GN/m 2 Masse m aste Kg Legge di Moto Tempo d azionamento 1 s Dt 0.01 s 25



26 Individuazione id i dello Spazio dil Lavoro 26 Ingeg Meccanica e Industriale
27 A finger rehabilitation i device Industriale Meccanica e I Ingeg M Compliance: Functional compliance Collateral compliance Coupling the robot bt to a cloth-glove: The patient s t finger can be driven External loads can be imposed 27
Università degli Studi di Brescia
 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Secondo Anno Automazione Industr per Applicazioni Speciali Curriculum: Robotica e Automazione Industr Coordinatore: Prof. Giovanni Legnani
XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Secondo Anno Automazione Industr per Applicazioni Speciali Curriculum: Robotica e Automazione Industr Coordinatore: Prof. Giovanni Legnani
Industrial Automation for Unconventional Applications
 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Terzo Anno Industrial Automation for Unconventional Applications Curriculum: Robotica e Automazione Industriale Coordinatore: Prof.
XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Terzo Anno Industrial Automation for Unconventional Applications Curriculum: Robotica e Automazione Industriale Coordinatore: Prof.
Università ità degli Studi di Brescia
 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Studio e Realizzazione di Sistemi Meccatronici per la Riabilitazione Curriculum: Biomeccanica Dottorando: Maurizio Mor Coordinatore:
XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Studio e Realizzazione di Sistemi Meccatronici per la Riabilitazione Curriculum: Biomeccanica Dottorando: Maurizio Mor Coordinatore:
Coordinatore: Prof. Giovanni Legnani Tutore: Prof. Rodolfo Faglia. Facoltà di Ingegneria Dipartimento t di Ingegneria Meccanica e Industriale
 XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Mechatronic paradigm: approccio teorico, esempi ed applicazioni del modello meccatronico Curriculum: Sistemi Avanzati di
XXIII Ciclo di Dottorato di Ricerca in Meccanica Applicata Relazione Primo Anno Mechatronic paradigm: approccio teorico, esempi ed applicazioni del modello meccatronico Curriculum: Sistemi Avanzati di
Modelli teorico-sperimentali per azionamenti industriali
 Università degli Studi di Brescia Facoltà di Ingegneria Dipartimento di Ingegneria Meccanica e Industriale XXIII Ciclo di Dottorato di Ricerca in Meccanica pplicata Relazione Primo nno Modelli teorico-sperimentali
Università degli Studi di Brescia Facoltà di Ingegneria Dipartimento di Ingegneria Meccanica e Industriale XXIII Ciclo di Dottorato di Ricerca in Meccanica pplicata Relazione Primo nno Modelli teorico-sperimentali
Università degli Studi di Brescia Dipartimento di Ingegneria Meccanica e Industriale Gruppo di Meccanica Applicata alle Macchine
 a Dipartimen Meccanica e Industriale Gruppo di Meccanica Applicata alle Macchine Proposte di Tesi di Laurea Riferimenti: Antonini Massimo, Pomi Diego Tel. 5927 Fausti Davide Tel. 5928 Amici Cinzia, Mor
a Dipartimen Meccanica e Industriale Gruppo di Meccanica Applicata alle Macchine Proposte di Tesi di Laurea Riferimenti: Antonini Massimo, Pomi Diego Tel. 5927 Fausti Davide Tel. 5928 Amici Cinzia, Mor
Progetto e Realizzazione di un Robot a Cinematica Parallela per Applicazioni Mediche
 Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
INGEGNERIA dell AUTOMAZIONE a Padova
 INGEGNERIA dell AUTOMAZIONE a Padova 1 Struttura dei corsi di laurea nel settore 1 Primo anno comune 2 3 INGEGNERIA DELL INFORMAZIONE ELET -prof IFprof BIOprof 4 * 5 * AUT ELET IF TLC BIO Attenzione!!!
INGEGNERIA dell AUTOMAZIONE a Padova 1 Struttura dei corsi di laurea nel settore 1 Primo anno comune 2 3 INGEGNERIA DELL INFORMAZIONE ELET -prof IFprof BIOprof 4 * 5 * AUT ELET IF TLC BIO Attenzione!!!
CURRICULUM FORMATIVO E PROFESSIONALE. dichiara: TITOLI SCOLASTICI. di aver conseguito il Diploma di Maturità classica il 30 luglio 1983,
 CURRICULUM FORMATIVO E PROFESSIONALE La sottoscritta Calderoni Maria Grazia nata a Faenza (RA) il 15.02.1964, residente a Russi dichiara: TITOLI SCOLASTICI di aver conseguito il Diploma di Maturità classica
CURRICULUM FORMATIVO E PROFESSIONALE La sottoscritta Calderoni Maria Grazia nata a Faenza (RA) il 15.02.1964, residente a Russi dichiara: TITOLI SCOLASTICI di aver conseguito il Diploma di Maturità classica
IMPORTI MASSIMI DI CONTRIBUTO A.A. 2017/18
 Corsi di Laurea 0880 ARCHITETTURA E PROCESSO EDILIZIO CE 1.670 0425 ATTUAZIONE E GESTIONE DEL PROGETTO IN ARCHITETTURA CE 1.670 8182 DESIGN DEL PRODOTTO INDUSTRIALE BO 0207 INGEGNERIA AEROSPAZIALE FO 0945
Corsi di Laurea 0880 ARCHITETTURA E PROCESSO EDILIZIO CE 1.670 0425 ATTUAZIONE E GESTIONE DEL PROGETTO IN ARCHITETTURA CE 1.670 8182 DESIGN DEL PRODOTTO INDUSTRIALE BO 0207 INGEGNERIA AEROSPAZIALE FO 0945
Manifesto degli Studi del Corso di Dottorato di Ricerca in Metodi, modelli e tecnologie per l ingegneria XXXII Ciclo
 Manifesto degli Studi del Corso di Dottorato di Ricerca in Metodi, modelli e tecnologie per l ingegneria XXXII Ciclo Nella composizione del Piano delle Attività Formative (PAF) i Dottorandi del XXXII ciclo
Manifesto degli Studi del Corso di Dottorato di Ricerca in Metodi, modelli e tecnologie per l ingegneria XXXII Ciclo Nella composizione del Piano delle Attività Formative (PAF) i Dottorandi del XXXII ciclo
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Controlli automatici
 Controlli automatici Informazioni sul corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Informazioni generali (1/2) Corso di
Controlli automatici Informazioni sul corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Informazioni generali (1/2) Corso di
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
 Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Laurea Magistrale in Ingegneria Meccatronica
 Università degli Studi di Padova Sede di Vicenza Laurea Magistrale in Ingegneria Meccatronica Requisiti per l ammissione Laurea di primo livello in Ingegneria Meccanica e Meccatronica (curriculum Meccatronico),
Università degli Studi di Padova Sede di Vicenza Laurea Magistrale in Ingegneria Meccatronica Requisiti per l ammissione Laurea di primo livello in Ingegneria Meccanica e Meccatronica (curriculum Meccatronico),
Informazioni e Programma
 Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura
 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
Ordine degli studi UNIVERSITA DI ROMA LA SAPIENZA. Facoltà di INGEGNERIA
 UNIVERSITA DI ROMA LA SAPIENZA Facoltà di INGEGNERIA Regolamento Didattico del Corso di Laurea Specialistica in INGEGNERIA MECCANICA Classe n 36/S (Ingegneria meccanica) Sede di Roma Articolo 1. Obiettivi
UNIVERSITA DI ROMA LA SAPIENZA Facoltà di INGEGNERIA Regolamento Didattico del Corso di Laurea Specialistica in INGEGNERIA MECCANICA Classe n 36/S (Ingegneria meccanica) Sede di Roma Articolo 1. Obiettivi
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica
 PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
Istituto di Istruzione Secondaria I.I.S. via Silvestri,301. Programma di FISICA
 Classe 1 a A - indirizzo ELETTRONICA ED ELETTROTECNICA PROGRAMMA SVOLTO Modulo A- GRANDEZZE E MISURE Unità 1- Le grandezze: Perché studiare la fisica Di che cosa si occupa la fisica - La misura delle grandezze
Classe 1 a A - indirizzo ELETTRONICA ED ELETTROTECNICA PROGRAMMA SVOLTO Modulo A- GRANDEZZE E MISURE Unità 1- Le grandezze: Perché studiare la fisica Di che cosa si occupa la fisica - La misura delle grandezze
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Robotica educativa nell insegnamento del disegno tecnico
 Robotica educativa nell insegnamento del disegno tecnico Genova, 12 Novembre 2008 Carlo Nati Disegno geometrico: l oggetto e la sua rappresentazione grafica problemi di confronto tra modello grafico e
Robotica educativa nell insegnamento del disegno tecnico Genova, 12 Novembre 2008 Carlo Nati Disegno geometrico: l oggetto e la sua rappresentazione grafica problemi di confronto tra modello grafico e
Ordine degli studi UNIVERSITA DI ROMA LA SAPIENZA. Facoltà di INGEGNERIA
 UNIVERSITA DI ROMA LA SAPIENZA Facoltà di INGEGNERIA Regolamento Didattico del Corso di Laurea Specialistica in INGEGNERIA MECCANICA Classe n 36/S (Ingegneria meccanica) Sede di Roma Articolo 1. Obiettivi
UNIVERSITA DI ROMA LA SAPIENZA Facoltà di INGEGNERIA Regolamento Didattico del Corso di Laurea Specialistica in INGEGNERIA MECCANICA Classe n 36/S (Ingegneria meccanica) Sede di Roma Articolo 1. Obiettivi
CORSO DI LAUREA MAGISTRALE IN INGEGNERIA INFORMATICA
 CORSO DI LAUREA MAGISTRALE IN INGEGNERIA INFORMATICA Corso afferente al Dipartimento di Ingegneria dell Informazione. Classe LM-32 Ingegneria informatica. Prof. Alberto Broggi alberto.broggi@unipr.it DIPARTIMENTO
CORSO DI LAUREA MAGISTRALE IN INGEGNERIA INFORMATICA Corso afferente al Dipartimento di Ingegneria dell Informazione. Classe LM-32 Ingegneria informatica. Prof. Alberto Broggi alberto.broggi@unipr.it DIPARTIMENTO
L IMPEGNO DEL DEI NELLA RICERCA
 Convegno sui risultati del progetto CARGEN Palazzo del Bo, 8/7/2009 L IMPEGNO DEL DEI NELLA RICERCA Alessandro Paccagnella DEI Dipartimento di Ingegneria dell Informazione Università di Padova 1 Certificazione
Convegno sui risultati del progetto CARGEN Palazzo del Bo, 8/7/2009 L IMPEGNO DEL DEI NELLA RICERCA Alessandro Paccagnella DEI Dipartimento di Ingegneria dell Informazione Università di Padova 1 Certificazione
Anno Accademico 2008/2009. Biomeccanica II. Anno Accademico 2008/2009. Lez. BM1. Natura dell intervento didattico (segue)
") Biomeccanica II Lez. BM1 Anno Accademico 2008/2009 1 Anno comune: Biomeccanica (Prof. Paola Zamparo), le basi della biomeccanica. Anno Accademico 2008/2009 2 Anno curriculum scientifico: Biomeccanica II,
Biomeccanica II Lez. BM1 Anno Accademico 2008/2009 1 Anno comune: Biomeccanica (Prof. Paola Zamparo), le basi della biomeccanica. Anno Accademico 2008/2009 2 Anno curriculum scientifico: Biomeccanica II,
SUMMER SCHOOL 2015. Ingegneria Informatica. Angelo Morzenti coordinatore del Corso di Studi
 SUMMER SCHOOL 2015 Ingegneria Informatica Angelo Morzenti coordinatore del Corso di Studi Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria 17 Giugno 2015 Il logo del Politecnico
SUMMER SCHOOL 2015 Ingegneria Informatica Angelo Morzenti coordinatore del Corso di Studi Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria 17 Giugno 2015 Il logo del Politecnico
TITOLI PROFESSIONALI. Cultore della materia in "Pedagogia Speciale" Membro effettivo della commissione di esami di Pedagogia Speciale
 Curriculum vitae et studiorum e Pubblicazioni di Impellizzeri Salvatore, nato a il 02/02/1961. Le dichiarazioni sono rese sotto la propria responsabilità personale consapevole delle conseguenze penali
Curriculum vitae et studiorum e Pubblicazioni di Impellizzeri Salvatore, nato a il 02/02/1961. Le dichiarazioni sono rese sotto la propria responsabilità personale consapevole delle conseguenze penali
Approccio Meccatronico alla progettazione. Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation
 Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
A spasso su Marte: modelli software per la cinematica di robot mobili
 A spasso su Marte: modelli software per la cinematica di robot mobili Davide Brugali Incontri Scientifici in Facoltà 30 Gennaio 2008 Didattica e Ricerca Corso di Laurea Specialistica in Ingegneria Informatica
A spasso su Marte: modelli software per la cinematica di robot mobili Davide Brugali Incontri Scientifici in Facoltà 30 Gennaio 2008 Didattica e Ricerca Corso di Laurea Specialistica in Ingegneria Informatica
Università di Pisa Facoltà di Scienze Matematiche Fisiche e Naturali
 Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea Specialistica in Informatica (classe 23/S: Informatica) Corso di Laurea Specialistica in Tecnologie Informatiche (classe 23/S: Informatica)
Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea Specialistica in Informatica (classe 23/S: Informatica) Corso di Laurea Specialistica in Tecnologie Informatiche (classe 23/S: Informatica)
 CURRICULUM VITAE INFORMAZIONI PERSONALI Nome PEROTTI CESARE Indirizzo DIPARTIMENTO DI SCIENZE DELLA TERRA E DELL AMBIENTE UNIVERSITÀ DEGLI STUDI DI PAVIA VIA FERRATA, 1 27100 PAVIA Telefono 0382985849
CURRICULUM VITAE INFORMAZIONI PERSONALI Nome PEROTTI CESARE Indirizzo DIPARTIMENTO DI SCIENZE DELLA TERRA E DELL AMBIENTE UNIVERSITÀ DEGLI STUDI DI PAVIA VIA FERRATA, 1 27100 PAVIA Telefono 0382985849
Allegato n. 1 alla relazione riassuntiva compilata il 10/4/2008
 Procedura di valutazione comparativa per la copertura di 1 posto di ricercatore universitario presso la Facoltà di Ingegneria della Seconda Università degli Studi di Napoli - Settore scientifico disciplinare
Procedura di valutazione comparativa per la copertura di 1 posto di ricercatore universitario presso la Facoltà di Ingegneria della Seconda Università degli Studi di Napoli - Settore scientifico disciplinare
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
POLITECNICO DI TORINO ALLEGATO B - Bando D.R. n. 148 del Settore Scientifico disciplinare
 ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI per la copertura numero diciassette posti per ricercatore a tempo determinato di cui all art. 1 del bando D.R. n 148 del 18.02.2000 H06X GEOTECNICA
ELENCO delle DISCIPLINE dei SETTORI SCIENTIFICO-DISCIPLINARI per la copertura numero diciassette posti per ricercatore a tempo determinato di cui all art. 1 del bando D.R. n 148 del 18.02.2000 H06X GEOTECNICA
Corso di Laurea Specialistica in Informatica Università di Pisa
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Curriculum Vitae Ing. LAURA RUBEO
 Informazioni personali Nome e Cognome Laura RUBEO Indirizzo Via IV Novembre 12, CAP 67069, Tagliacozzo, AQ (domicilio per la corrispondenza delle procedure di selezione) Via Prenestina 461, CAP 00177,
Informazioni personali Nome e Cognome Laura RUBEO Indirizzo Via IV Novembre 12, CAP 67069, Tagliacozzo, AQ (domicilio per la corrispondenza delle procedure di selezione) Via Prenestina 461, CAP 00177,
PROGRAMMAZIONE DIDATTICA DIPARTIMENTO MECCANICO. Tecnologia meccanica e applicazioni. Classe 3MT A.S
 Progettazione Disciplinare PROGRAMMAZIONE DIDATTICA DIPARTIMENTO MECCANICO Tecnologia meccanica e applicazioni Classe 3MT A.S.2016 2017 Rev. 0 del 08-03-04 pag. 1 di 7 Progettazione Disciplinare 1 Caratteristiche
Progettazione Disciplinare PROGRAMMAZIONE DIDATTICA DIPARTIMENTO MECCANICO Tecnologia meccanica e applicazioni Classe 3MT A.S.2016 2017 Rev. 0 del 08-03-04 pag. 1 di 7 Progettazione Disciplinare 1 Caratteristiche
UNIVERSITA' DEGLI STUDI DI PADOVA
 Candidato Giovanni BOSCHETTI allegato C) al Verbale 3 del 12/05/2017 VALUTAZIONE DELLE PUBBLICAZIONI SCIENTIFICHE, DEL CURRICULUM E DELL'ATTIVITA' DIDATTICA E DI RICERCA Giudizio collegiale della Commissione:
Candidato Giovanni BOSCHETTI allegato C) al Verbale 3 del 12/05/2017 VALUTAZIONE DELLE PUBBLICAZIONI SCIENTIFICHE, DEL CURRICULUM E DELL'ATTIVITA' DIDATTICA E DI RICERCA Giudizio collegiale della Commissione:
Collegio Ingegneria Informatica, del Cinema e Meccatronica LAUREA MAGISTRALE IN INGEGNERIA MECCATRONICA
 Collegio Ingegneria Informatica, del Cinema e Meccatronica LAUREA MAGISTRALE IN INGEGNERIA MECCATRONICA INNOVAZIONE NELLA PROGETTAZIONE Controlli Informatica Meccatronica Sistemi Elettrici Ingegneria Meccatronica
Collegio Ingegneria Informatica, del Cinema e Meccatronica LAUREA MAGISTRALE IN INGEGNERIA MECCATRONICA INNOVAZIONE NELLA PROGETTAZIONE Controlli Informatica Meccatronica Sistemi Elettrici Ingegneria Meccatronica
Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente
 Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente Torino, 12.12.2016 HuManS - Obiettivo generale progetto Il programma di ricerca è rivolto all'integrazione dei più recenti sistemi
Progetto HuManS Capofila COMAU Piattaforma Regionale Fabbrica Intelligente Torino, 12.12.2016 HuManS - Obiettivo generale progetto Il programma di ricerca è rivolto all'integrazione dei più recenti sistemi
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
TERAPIA MANUALE e RIABILITAZIONE
 Corso base in TERAPIA MANUALE e RIABILITAZIONE a - 8 edizione - Gennaio Ottobre 2015 Foligno (PG) NOTE INTRODUTTIVE Il trattamento dei disturbi funzionali e/o strutturali dei sistemi muscolo scheletrico
Corso base in TERAPIA MANUALE e RIABILITAZIONE a - 8 edizione - Gennaio Ottobre 2015 Foligno (PG) NOTE INTRODUTTIVE Il trattamento dei disturbi funzionali e/o strutturali dei sistemi muscolo scheletrico
CURRICULUM di Paola Rubbioni
 CURRICULUM di Paola Rubbioni Nata a Perugia il 16/9/1968 Coniugata, tre figli Borsista del CNR come laureanda nel 1992 Laureata in Matematica il 10/7/1992 presso l Università di Perugia con la votazione
CURRICULUM di Paola Rubbioni Nata a Perugia il 16/9/1968 Coniugata, tre figli Borsista del CNR come laureanda nel 1992 Laureata in Matematica il 10/7/1992 presso l Università di Perugia con la votazione
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico (ing. M. Troncossi)
") MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
CURRICULUM VITAE. Dott. Antonio Netti. Dati personali. Istruzione e formazione
 CURRICULUM VITAE Dott. Antonio Netti Dati personali Nome e cognome: Antonio Netti Luogo e data di nascita: San Giovanni Rotondo (Fg), 06/06/1981 Codice Fiscale: NTT NTN 81H06 H926I Residenza: Via Santa
CURRICULUM VITAE Dott. Antonio Netti Dati personali Nome e cognome: Antonio Netti Luogo e data di nascita: San Giovanni Rotondo (Fg), 06/06/1981 Codice Fiscale: NTT NTN 81H06 H926I Residenza: Via Santa
Modulo 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria
 Progettazione Disciplinare 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria Segmento 01 : Principio di omogeneità Presentazione: il modulo è propedeutico agli argomenti che
Progettazione Disciplinare 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria Segmento 01 : Principio di omogeneità Presentazione: il modulo è propedeutico agli argomenti che
CAP. VI CORSO DI LAUREA IN INGEGNERIA GESTIONALE
 CAP. VI CORSO DI LAUREA IN INGEGNERIA GESTIONALE Il Corso di Laurea in Ingegneria Gestionale comprende unità didattiche ed altre attività formative per un totale di 180 crediti. Sono previsti sei indirizzi:
CAP. VI CORSO DI LAUREA IN INGEGNERIA GESTIONALE Il Corso di Laurea in Ingegneria Gestionale comprende unità didattiche ed altre attività formative per un totale di 180 crediti. Sono previsti sei indirizzi:
MARIN LOUISE FISIOTERAPISTA. 1. Referente Aziendale Riabilitazione dal , 2. Titolare di posizione organizzativa dal 2005
 F O R M A T O E U R O P E O P E R I L C U R R I C U L U M V I T A E INFORMAZIONI PERSONALI COGNOME e NOME MARIN LOUISE Data di nascita Qualifica Incarico attuale FISIOTERAPISTA 1. Referente Aziendale Riabilitazione
F O R M A T O E U R O P E O P E R I L C U R R I C U L U M V I T A E INFORMAZIONI PERSONALI COGNOME e NOME MARIN LOUISE Data di nascita Qualifica Incarico attuale FISIOTERAPISTA 1. Referente Aziendale Riabilitazione
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
La Commissione giudicatrice della procedura, nominata con decreto rettorale n. 29841 del 23 settembre 2014, e composta dai seguenti professori:
 Verbale della procedura selettiva ai sensi del Regolamento di Ateneo per la disciplina della chiamata dei professori di prima e seconda fascia in attuazione degli articoli 18 e 24 della legge 240/2010.
Verbale della procedura selettiva ai sensi del Regolamento di Ateneo per la disciplina della chiamata dei professori di prima e seconda fascia in attuazione degli articoli 18 e 24 della legge 240/2010.
Curriculum Vitae di SIMONE CECCHETTO
 Curriculum Vitae di SIMONE CECCHETTO DATI PERSONALI nato a VICENZA il 11-12-1975 TITOLI DI STUDIO 20-11-2014 Corso di formazione manageriale per dirigenti di ambito sanitario ed. 2014 presso Facoltà di
Curriculum Vitae di SIMONE CECCHETTO DATI PERSONALI nato a VICENZA il 11-12-1975 TITOLI DI STUDIO 20-11-2014 Corso di formazione manageriale per dirigenti di ambito sanitario ed. 2014 presso Facoltà di
RELAZIONE DI FINE TIROCINIO
 FACOLTA DI INGEGNERIA CIVILE Corso di Laurea Magistrale in Ingegneria Civile per la protezione dai rischi naturali. Anno Accademico 2016/2017 RELAZIONE DI FINE TIROCINIO Realizzazione di un modello agli
FACOLTA DI INGEGNERIA CIVILE Corso di Laurea Magistrale in Ingegneria Civile per la protezione dai rischi naturali. Anno Accademico 2016/2017 RELAZIONE DI FINE TIROCINIO Realizzazione di un modello agli
CORSO DI LAUREA IN INGEGNERIA GESTIONALE a.a. 2017/18
 CORSO DI LAUREA IN INGEGNERIA GESTIONALE a.a. 2017/18 Il Corso di Laurea in Ingegneria Gestionale comprende unità didattiche ed altre attività formative per un totale di 180 crediti. Sono previsti cinque
CORSO DI LAUREA IN INGEGNERIA GESTIONALE a.a. 2017/18 Il Corso di Laurea in Ingegneria Gestionale comprende unità didattiche ed altre attività formative per un totale di 180 crediti. Sono previsti cinque
Benedetto Galeazzo. Italiana Maschile. Dal 1990 in corso Socio dell Ottica Galeazzo Giuseppe
 Curriculum Vitae Informazioni personali NOME / COGNOME INDIRIZZO TEL FAX E-MAIL Benedetto Galeazzo Via Principe di Palagonia 43, 90145 Palermo 091 6865040-3471215644 091 585524 benny@otticagaleazzo.it
Curriculum Vitae Informazioni personali NOME / COGNOME INDIRIZZO TEL FAX E-MAIL Benedetto Galeazzo Via Principe di Palagonia 43, 90145 Palermo 091 6865040-3471215644 091 585524 benny@otticagaleazzo.it
Cinematica differenziale inversa Statica
 Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
CURRICULUM VITAE dell ing. Davide Concato
 CURRICULUM VITAE dell ing. Davide Concato Formazione Laureato in Ingegneria Civile presso la Facoltà di Ingegneria di Ferrara sviluppando una tesi relativa a Il Sistema Qualità aziendale nel Settore delle
CURRICULUM VITAE dell ing. Davide Concato Formazione Laureato in Ingegneria Civile presso la Facoltà di Ingegneria di Ferrara sviluppando una tesi relativa a Il Sistema Qualità aziendale nel Settore delle
PROGRAMMAZIONE DIDATTICA MODULI RELATIVI ALLE COMPETENZE STCW
 Progetto esecutivo MD-STCW/02-7.3_2 Sistema Gestione Qualità per la Formazione Marittima MOD 7.3_2 Ed. 1 REV. 0 del 01.12.2014 Red. RSG App.DS Pag. 1 /9 PROGRAMMAZIONE DIDATTICA MODULI RELATIVI ALLE COMPETENZE
Progetto esecutivo MD-STCW/02-7.3_2 Sistema Gestione Qualità per la Formazione Marittima MOD 7.3_2 Ed. 1 REV. 0 del 01.12.2014 Red. RSG App.DS Pag. 1 /9 PROGRAMMAZIONE DIDATTICA MODULI RELATIVI ALLE COMPETENZE
DURATA PREVISTA Ore in presenza 20 Ore a distanza Totale ore 20 Competenza. 4. Applicare le norme del disegno tecnico
 2 periodo didattico - CLASSE III a Modulo n. 1: IL DISEGNO TECNICO MECCANICO DURATA PREVISTA Ore in presenza 20 Ore a distanza Totale ore 20 1. Scegliere in autonomia gli strumenti adeguati al disegno
2 periodo didattico - CLASSE III a Modulo n. 1: IL DISEGNO TECNICO MECCANICO DURATA PREVISTA Ore in presenza 20 Ore a distanza Totale ore 20 1. Scegliere in autonomia gli strumenti adeguati al disegno
Dal 1995 al 1997 Borsista Post-dottorato presso il Dipartimento di Rappresentazione, Università degli Studi di Palermo.
 ARCH. GABRIELLA CURTI DIPARTIMENTO DI ARCHITETTURA E ANALISI DELLA CITTA' MEDITERRANEA VIA MELISSARI, FEO DI VITO (REGGIO CALABRIA) CAP 89024 e-mail: gabriella.curti@unirc.it CURRICULUM VITAE PROFILO SCIENTIFICO
ARCH. GABRIELLA CURTI DIPARTIMENTO DI ARCHITETTURA E ANALISI DELLA CITTA' MEDITERRANEA VIA MELISSARI, FEO DI VITO (REGGIO CALABRIA) CAP 89024 e-mail: gabriella.curti@unirc.it CURRICULUM VITAE PROFILO SCIENTIFICO
Curriculum vitae del dott. ing. Gianfranco Beniamino Fiore
 Curriculum vitae del dott. ing. Gianfranco Beniamino Fiore Dati anagrafici Nato a Milano il 19.01.1968. Residente a Milano e-mail: gianfranco.fiore@polimi.it dal gennaio 2004 Attuale posizione Ricercatore
Curriculum vitae del dott. ing. Gianfranco Beniamino Fiore Dati anagrafici Nato a Milano il 19.01.1968. Residente a Milano e-mail: gianfranco.fiore@polimi.it dal gennaio 2004 Attuale posizione Ricercatore
Corso di laurea Magistrale in Matematica Classe LM-40 - Scienze Matematiche. Scienze
 Corso di laurea Magistrale in Matematica Classe LM-40 - Matematiche Prova di verifica della preparazione personale: 19 settembre 2017 N posti disponibili: accesso libero N posti studenti stranieri residenti
Corso di laurea Magistrale in Matematica Classe LM-40 - Matematiche Prova di verifica della preparazione personale: 19 settembre 2017 N posti disponibili: accesso libero N posti studenti stranieri residenti
Laboratorio di Sistemi e Automazione (A020-C320) esperienza competenze Competenze trasversali
 esperienza competenze Competenze trasversali") DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
Complementi di Controlli Automatici. Introduzione al corso
 Università di Roma Tre Complementi di Controlli Automatici Introduzione al corso Prof. Giuseppe Oriolo DIS, Università di Roma La Sapienza Organizzazione del corso le lezioni saranno tenute in parte da
Università di Roma Tre Complementi di Controlli Automatici Introduzione al corso Prof. Giuseppe Oriolo DIS, Università di Roma La Sapienza Organizzazione del corso le lezioni saranno tenute in parte da
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof Paolo Rocco (paolorocco@polimiit) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof Paolo Rocco (paolorocco@polimiit) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per
89026, San Ferdinando ( RC ), Italia , Castrolibero ( CS ), Italia
, Italia , Castrolibero ( CS ), Italia") F O R M A T O E U R O P E O P E R I L C U R R I C U L U M V I T A E INFORMAZIONI PERSONALI Nome Indirizzo di residenza via Rosarno, 43 89026, San Ferdinando ( RC ), Italia Indirizzo di domicilio via del
F O R M A T O E U R O P E O P E R I L C U R R I C U L U M V I T A E INFORMAZIONI PERSONALI Nome Indirizzo di residenza via Rosarno, 43 89026, San Ferdinando ( RC ), Italia Indirizzo di domicilio via del
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
MARCO BOELLA Curriculum vitæ
 Studi compiuti MARCO BOELLA Curriculum vitæ Maturità Classica nel 1989, presso il Liceo Ginnasio G. Carducci di Milano. Laureato a pieni voti in Matematica il 21 febbraio 1994 (quarto anno di corso), con
Studi compiuti MARCO BOELLA Curriculum vitæ Maturità Classica nel 1989, presso il Liceo Ginnasio G. Carducci di Milano. Laureato a pieni voti in Matematica il 21 febbraio 1994 (quarto anno di corso), con
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
L offerta formativa del Consiglio dei Corsi di Studio Integrati di Ingegneria Industriale
 L offerta formativa del Consiglio dei Corsi di Studio Integrati di Ingegneria Industriale Giorgio Donzella, Presidente del CCSA di Ingegneria Industriale I Corsi di Studio del CCSA 3 Corsi di primo livello
L offerta formativa del Consiglio dei Corsi di Studio Integrati di Ingegneria Industriale Giorgio Donzella, Presidente del CCSA di Ingegneria Industriale I Corsi di Studio del CCSA 3 Corsi di primo livello
ALLEGATO 2 al Regolamento didattico del Corso di Laurea in INGEGNERIA MECCANICA E MECCATRONICA Coorte 2016/2017
 ALLEGATO 2 al Regolamento didattico del Corso di Laurea in INGEGNERIA MECCANICA E MECCATRONICA Coorte 2016/2017 Obbligo Formativo Aggiuntivo (OFA) (Art. 2 del Regolamento didattico) L obbligo Formativo
ALLEGATO 2 al Regolamento didattico del Corso di Laurea in INGEGNERIA MECCANICA E MECCATRONICA Coorte 2016/2017 Obbligo Formativo Aggiuntivo (OFA) (Art. 2 del Regolamento didattico) L obbligo Formativo
Progetti di Tutorato Didattico per il Dipartimento di Ingegneria A.A. 2015/2016
 Progetti di Tutorato Didattico per il Dipartimento di A.A. 2015/2016 Nr Titolo Responsabile CDS Nr tutori Nr ore Ore totali Competenze richieste progetto 1 Formazione di base per il riconoscimento rocce
Progetti di Tutorato Didattico per il Dipartimento di A.A. 2015/2016 Nr Titolo Responsabile CDS Nr tutori Nr ore Ore totali Competenze richieste progetto 1 Formazione di base per il riconoscimento rocce
Prof.ssa Cecilia Laschi
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
F O R M A T O E U R O P E O
 F O R M A T O E U R O P E O P E R I L C U R R I C U L U M V I T A E INFORMAZIONI PERSONALI Nome Indirizzo Lisa Bellanti Via G. Pascoli 9, 54100, Massa, Italia Telefono +39-3200291233 E-mail lisabellanti77@hotmail.com,
F O R M A T O E U R O P E O P E R I L C U R R I C U L U M V I T A E INFORMAZIONI PERSONALI Nome Indirizzo Lisa Bellanti Via G. Pascoli 9, 54100, Massa, Italia Telefono +39-3200291233 E-mail lisabellanti77@hotmail.com,
ELETTRONICA ED ELETTROTECNICA
 ELETTRONICA ED ELETTROTECNICA Profilo in uscita Il Diplomato in Elettronica ed Elettrotecnica è in grado di intervenire nella progettazione, nella costruzione e nel collaudo di sistemi elettrici ed elettronici,
ELETTRONICA ED ELETTROTECNICA Profilo in uscita Il Diplomato in Elettronica ed Elettrotecnica è in grado di intervenire nella progettazione, nella costruzione e nel collaudo di sistemi elettrici ed elettronici,
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
produzione, dei servizi e delle professioni (art. 11 comma 4 DM509 del 3/11/99) sono state consultate in data 26/02/2003
 sono state consultate in data 26/02/2003") Allegato 23) Università degli Studi di BERGAMO Scheda informativa Università Classe Nome del corso Università degli Studi di BERGAMO Data del DM di approvazione del ordinamento 20/02/2004 didattico Data
Allegato 23) Università degli Studi di BERGAMO Scheda informativa Università Classe Nome del corso Università degli Studi di BERGAMO Data del DM di approvazione del ordinamento 20/02/2004 didattico Data
Giuseppe Lucisano e Cesare Fantuzzi. Flessibilità ed Adattabilità nella Fabbrica del Futuro
 Cluster Tecnologico Nazionale Fabbrica Intelligente Imprese, università, organismi di ricerca, associazioni e enti territoriali: insieme per la crescita del Manifatturiero Giuseppe Lucisano e Cesare Fantuzzi
Cluster Tecnologico Nazionale Fabbrica Intelligente Imprese, università, organismi di ricerca, associazioni e enti territoriali: insieme per la crescita del Manifatturiero Giuseppe Lucisano e Cesare Fantuzzi
FT5 ES* Le ns. Elettrovalvole CETOP 5. si caratterizzano per una progettazione. globale particolarmente accurata.
 Le ns. Elettrovalvole CETOP 5 FT5 ES* si caratterizzano per una progettazione globale particolarmente accurata. Infatti le caratteristiche tecniche c he le rendono molto affidabili e con performance molto
Le ns. Elettrovalvole CETOP 5 FT5 ES* si caratterizzano per una progettazione globale particolarmente accurata. Infatti le caratteristiche tecniche c he le rendono molto affidabili e con performance molto
REGOLAMENTO DIDATTICO DEL CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA INFORMATICA TITOLO PRIMO DISPOSIZIONI GENERALI E COMUNI
 REGOLAMENTO DIDATTICO DEL CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA INFORMATICA TITOLO PRIMO DISPOSIZIONI GENERALI E COMUNI Art. 1 Denominazione - Classe di appartenenza Titolo 1. E' istituito presso
REGOLAMENTO DIDATTICO DEL CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA INFORMATICA TITOLO PRIMO DISPOSIZIONI GENERALI E COMUNI Art. 1 Denominazione - Classe di appartenenza Titolo 1. E' istituito presso
Università degli Studi di Bari
 Università degli Studi di Bari Centro Interuniversitario Servizi Ingegneria Biomedica Giovanni Alfonso Borelli ANALISI DEL MOVIMENTO 2 FUNZIONI MOTORIE RESIDUE: CAMMINO STRUMENTAZIONE DEL LAM: SISTEMA
Università degli Studi di Bari Centro Interuniversitario Servizi Ingegneria Biomedica Giovanni Alfonso Borelli ANALISI DEL MOVIMENTO 2 FUNZIONI MOTORIE RESIDUE: CAMMINO STRUMENTAZIONE DEL LAM: SISTEMA
MANIFESTO DEGLI STUDI DEL CORSO DI LAUREA IN INFORMATICA (CREMA)
") MANIFESTO DEGLI STUDI DEL CORSO DI LAUREA IN INFORMATICA (CREMA) Nell anno accademico 2004/05, sono attivati il 1, il 2 e il 3 anno del Corso di Laurea triennale in Informatica presso il Polo Didattico
MANIFESTO DEGLI STUDI DEL CORSO DI LAUREA IN INFORMATICA (CREMA) Nell anno accademico 2004/05, sono attivati il 1, il 2 e il 3 anno del Corso di Laurea triennale in Informatica presso il Polo Didattico
Curriculum Vitae. Informazioni personali. Italiana
 Curriculum Vitae Informazioni personali Nome(i) / Cognome(i) Ivana Rabbone Indirizzo(i) Telefono(i) Tel + 390113131818 Fax +390113135459 E-mail ivana.rabbone@unito.it Cittadinanza Italiana Data di nascita
Curriculum Vitae Informazioni personali Nome(i) / Cognome(i) Ivana Rabbone Indirizzo(i) Telefono(i) Tel + 390113131818 Fax +390113135459 E-mail ivana.rabbone@unito.it Cittadinanza Italiana Data di nascita
Aston University School of Life & Health.
 C URRICULUM VITAE INFORMAZIONI PERSONALI Nome SCACCIA MASSIMILIANO Indirizzo VIALE MARCONI N.155, 00146 ROMA Telefono 393357151326 Fax E-mail maxs71@yahoo.it; Nazionalità Italiana Data di nascita 19/12/71
C URRICULUM VITAE INFORMAZIONI PERSONALI Nome SCACCIA MASSIMILIANO Indirizzo VIALE MARCONI N.155, 00146 ROMA Telefono 393357151326 Fax E-mail maxs71@yahoo.it; Nazionalità Italiana Data di nascita 19/12/71
UNIVERSITÀ DEGLI STUDI DI PISA FACOLTÀ DI INGEGNERIA CORSO DI LAUREA SPECIALISTICA in INGEGNERIA DELL AUTOMAZIONE
 Delibera n. 13 Il giorno 27/05/2003 alle ore 16 presso i locali del Dipartimento di Sistemi Elettrici e Automazione si è riunito il Consiglio del Corso di Laurea Specialistica in Ingegneria dell Automazione
Delibera n. 13 Il giorno 27/05/2003 alle ore 16 presso i locali del Dipartimento di Sistemi Elettrici e Automazione si è riunito il Consiglio del Corso di Laurea Specialistica in Ingegneria dell Automazione
Un sistema di interazione uomo-robot per compiti di manipolazione mobile basato su realtà virtuale
 Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
Presidente del Corso Maurizio Magnani Primario Ortopedico Villalba Hospital, Bologna Direttore Sanitario Centro Clinico Ortopedico Bologna
 III Corso di Aggiornamento INNOVAZIONI IN ORTOPEDIA, TRAUMATOLOGIA E RIABILITAZIONE: FAST- TRACK SURGERY - FAST- TRACK REHABILITATION Dalla chirurgia ricostruttiva artroscopica, meniscale, cartilaginea,
III Corso di Aggiornamento INNOVAZIONI IN ORTOPEDIA, TRAUMATOLOGIA E RIABILITAZIONE: FAST- TRACK SURGERY - FAST- TRACK REHABILITATION Dalla chirurgia ricostruttiva artroscopica, meniscale, cartilaginea,
PAS _ A020_UNIPD_2015. Didattica delle tecnologie meccaniche di processo e di prodotto. Professore Domenico Fernando Antonucci
 PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di prodotto. Professore Domenico Fernando Antonucci PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di
PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di prodotto. Professore Domenico Fernando Antonucci PAS _ A020_UNIPD_2015 Didattica delle tecnologie meccaniche di processo e di
Dottorato di Ricerca in "Scienze della Formazione e Psicologia" Ciclo XXXI Coordinatrice del Dottorato Prof.ssa Simonetta Ulivieri
 Dottorato di Ricerca in "Scienze della Formazione e Psicologia" Ciclo XXXI Coordinatrice del Dottorato Prof.ssa Simonetta Ulivieri Dottoranda: Giulia Vettori Anno di Dottorato: I Tutor: Prof.ssa Lucia
Dottorato di Ricerca in "Scienze della Formazione e Psicologia" Ciclo XXXI Coordinatrice del Dottorato Prof.ssa Simonetta Ulivieri Dottoranda: Giulia Vettori Anno di Dottorato: I Tutor: Prof.ssa Lucia
Tabella 1a - Corsi di Studio con sede didattica in Bologna
 Tabella 1a - Corsi di Studio con sede didattica in Bologna Cod. Materia Desc. Materia Desc. Integrato Sdopp. Mod. Ssd Cfu tot. Ciclo Ore componente Cds Desc. Cds Sede didattica 29894 FLUIDODINAMICA E APPLICAZIONI
Tabella 1a - Corsi di Studio con sede didattica in Bologna Cod. Materia Desc. Materia Desc. Integrato Sdopp. Mod. Ssd Cfu tot. Ciclo Ore componente Cds Desc. Cds Sede didattica 29894 FLUIDODINAMICA E APPLICAZIONI
candidato_ dott. MELLO Daniela
 candidato_ dott. MELLO Daniela DATI GENERALI Luogo e data di nascita: Napoli, 5 dicembre 1975 Laurea: Università di Napoli Federico II, Architettura, 2001 *** Sono presi in considerazione tutti i titoli
candidato_ dott. MELLO Daniela DATI GENERALI Luogo e data di nascita: Napoli, 5 dicembre 1975 Laurea: Università di Napoli Federico II, Architettura, 2001 *** Sono presi in considerazione tutti i titoli
CURRICULUM METODOLOGICO
 CURRICULUM METODOLOGICO UNITA DIDATTICHE A + B Competenze e abilità generali Esercitazioni e complememti di Chimica Inorganica I I I fisica II Chimica organica applicata Elettro Conosce e sa praticare
CURRICULUM METODOLOGICO UNITA DIDATTICHE A + B Competenze e abilità generali Esercitazioni e complememti di Chimica Inorganica I I I fisica II Chimica organica applicata Elettro Conosce e sa praticare
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
AL PRESIDENTE DEL C.C.L. INGEGNERIA CIVILE SEDE
 AL PRESIDENTE DEL C.C.L. INGEGNERIA CIVILE SEDE PROGRAMMA DELL ATTIVITÀ DIDATTICA PREVISTA PER L ANNO ACCADEMICO 2012/2013 DEL PROF. ING. Italo Meloni, ASSOCIATO di TRASPORTI (ICAR 05), A TEMPO PIENO,
AL PRESIDENTE DEL C.C.L. INGEGNERIA CIVILE SEDE PROGRAMMA DELL ATTIVITÀ DIDATTICA PREVISTA PER L ANNO ACCADEMICO 2012/2013 DEL PROF. ING. Italo Meloni, ASSOCIATO di TRASPORTI (ICAR 05), A TEMPO PIENO,
2, via dei Garofani, 61043, Cagli (PU), Italia
, Italia") Curriculum Vitae Informazioni personali Cognome(i/)/Nome(i) Indirizzo(i) Rossi Roberto 2, via dei Garofani, 61043, Cagli (PU), Italia Telefono(i) 0721/1794041 Fax E-mail fisio67@libero.it Mobile345319371
Curriculum Vitae Informazioni personali Cognome(i/)/Nome(i) Indirizzo(i) Rossi Roberto 2, via dei Garofani, 61043, Cagli (PU), Italia Telefono(i) 0721/1794041 Fax E-mail fisio67@libero.it Mobile345319371
Chi siamo (1) Lucio Zavanella. Nicola Saccani. Simone Zanoni
 Lucio Zavanella. Nicola Saccani. Simone Zanoni") GRUPPO DI IMPIANTI INDUSTRIALI MECCANICI ING-IND/17 IND/17 Dipartimento di Ingegneria Meccanica e Industriale Università degli Studi di Brescia 1 Chi siamo (1) 3 professori ordinari 1 professore associato
GRUPPO DI IMPIANTI INDUSTRIALI MECCANICI ING-IND/17 IND/17 Dipartimento di Ingegneria Meccanica e Industriale Università degli Studi di Brescia 1 Chi siamo (1) 3 professori ordinari 1 professore associato
" Meccatronica per le nuove attività produttive MECAP".
 UNIVERSITA' DEGLI STUDI DI MESSINA DIPARTIMENTO DI INGEGNERIA CIVILE POR SICILIA 2000-2006 ASSE III RISORSE UMANE MISURA 3.07 az C Cod. Prog. 1999:IT.16.1.PO.011/3.07/9.2.14/0332 Università degli Studi
UNIVERSITA' DEGLI STUDI DI MESSINA DIPARTIMENTO DI INGEGNERIA CIVILE POR SICILIA 2000-2006 ASSE III RISORSE UMANE MISURA 3.07 az C Cod. Prog. 1999:IT.16.1.PO.011/3.07/9.2.14/0332 Università degli Studi