ROBOCUP JR ITALIA 2012
|
|
|
- Aldo Deluca
- 5 anni fa
- Visualizzazioni
Transcript
1 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile Della squadra NONSO Istituto Vito Volterra
2 La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica regolata dal D.P.R. 275/99 (art. 7) che permette alle scuole statali di operare sinergicamente per obiettivi condivisi e ritenuti importanti per l offerta formativa erogata all utenza. La Rete di scuole è nata sulla condivisione di una serie di principi EDUCATIVI e DIDATTICI riferiti alla realtà della scuola italiana. Questi principi e le conseguenti proposte operative erano stati riportati in un documento del maggio 2008 dal titolo: Manifesto per una RoboCupJr italiana - una proposta per la diffusione dell utilizzo didattico della Robotica nelle scuole a cura di Andrea Bonarini, Augusto Chioccariello e Giovanni Marcianò. Maggio 2008 L obiettivo della Rete organizzare l edizione italiana della Robocup Jr concretizza una spinta al confronto e alla collaborazione tra Istituti scolastici, elementi che motivano docenti e studenti all impegno nell innovazione, sia didattica che tecnologica, affrontando i problemi che costituiscono uno standard internazionale dal 2000, quando la Robocup (manifestazione riservata alle Università di tutto il mondo) ha proposto le tre gare per la scuola: Dance Rescue Soccer. La Robocup Jr ITALIA è Una manifestazione nazionale fondata di tre punti forti: 1. una struttura che cura l organizzazione e gestisce gli aspetti di organizzazione, promozione, svolgimento ai diversi livelli, regionali e nazionali; 2. un contenuto condiviso, ovvero regolamenti, formule di gara, supporto formativo e informativo ai partecipanti;
3 3. una documentazione delle proposte didattiche e del lavoro degli studenti che coinvolgono l uso di kit o robot auto costruiti per la partecipazione agli eventi organizzati dalla Rete. Questo volumetto appartiene alla collana di documentazione. Sul piano organizzativo e gestionale della Rete di scuole lo Statuto prevede organismi ben distinti ma fortemente integrati: COMITATO DI GESTIONE formato dai Dirigenti scolastici degli Istituti fondatori o associati alla Rete. Si riunisce due volte l anno in via ordinaria, e online per decisioni straordinarie. ISTITUTO CAPOFILA come previsto dal DPR 275/99 cura gli aspetti burocratici, amministrativi e contabili della Rete. Il Dirigente scolastico dell Istituto capofila è il legale rappresentante della Rete e provvede a dare esecuzione alle delibere del Comitato di Gestione. COMITATO TECNICO formato dai docenti referenti degli Istituti fondatori o associati alla Rete, provvede a definire il Bando e i Regolamenti di gara per la manifestazione annuale nazionale, trasmettendoli al Comitato di gestione che li deve approvare. COMITATO LOCALE - Cura l edizione annuale della manifestazione, ed è formato a cura del Istituto fondatore o associato a cui il Comitato di Gestione ha assegnato la cura dell evento. ISTITUTI PARTECIPANTI iscrivendosi alle gare, beneficiano del supporto della Rete ma non partecipano alle decisioni gestionali o tecniche. La partecipazione alla gara nazionale li rende idonei per aderire alla Rete. Diversamente serve il parere del Comitato Tecnico.
4 autori Andreos Davide Favaro Marco Linotti Andrea TEAM NONSO PARTECIPA ALLA GARA DI Rescue A Istituto Vito Volterra Classe 4F

5 CAP. 1 - DATI GENERALI La squadra è composta da tre studenti appartenenti all istituto ITIS Vito Volterra di San Donà Di Piave: -Andreos Davide -Favaro Marco -Linotti Andrea (Caposquadra) I docenti responsabili sono Segatello Mirco e Slepoi Daniele. ITIS VITO VOLTERRA Nel 1986 l Istituto Vito Volterra ha ottenuto l autonomia scolastica. Tutt' oggi, appena celebrato il suo 25 anno di età, la scuola può ritenersi una delle più importanti della provincia.
6 Grazie a i numerosi corsi, progetti e iniziative l' istituto può offrire conoscenze ed esperienze che potranno accompagnare i suoi studenti anche dopo il termine della 5 classe. Il corso di robotica fa parte di questi e di anno in anno accoglie gruppi di studenti sempre più numerosi; ed ora l'itis Vito Volterra è pronto a lanciarsi nell' impresa Robocup Jr.
7 CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE All' interno dell' istituto i corsi di robotica sono presenti dal 2009 ma solo quest' anno è stata proposta la partecipazione alla Robocup Jr. Italia. L idea di partecipare è stata proposta agli studenti già frequentanti il corso di robotica extrascolastico dal docente Segatello Mirco; gli studenti dopo aver visto alcuni file riguardanti le precedenti edizioni della Robocup (video, foto, ) hanno deciso di cimentarsi in questa nuova esperienza e di cogliere la sfida. Con l inizio del nuovo anno scolastico sono arrivati anche i primi ostacoli, l assenza di un campo di gara all interno della scuola faceva parte di questi. Nonostante tutto i professori hanno sempre cercato di incoraggiarci, ottenendo alla fine buoni risultati.

8 CAP. 3 NOME E STRUTTURA DEL ROBOT Il nome del Robot è nato per caso guardando un film intitolato INTERSTELLA 5555, che è proprio il nome di quest ultimo. Il robot ha subito una serie di modifiche nel tempo. Da una posizione interna dei motori si è passati ad una esterna per diminuire il peso che gravava troppo al centro del robot, facendolo perdere aderenza.

9 Una successiva modifica è stata attuata per il posizionamento dell'unità centrale. Ad una posizione troppo avanzata che rendeva impossibile l'uso della pseudo-pinza si è preferita una posizione più arretrata, riuscendo anche a bilanciare meglio il peso. Abbiamo preferito utilizzare una coppia di cingoli invece delle ruote; un ruotino inserito nella parte anteriore, aiutato da un peso, facilita la marcia in salita. BASE PARTICOLARE SENSORI + RUOTINO


10 COMPLETO

11 CAP. 4 MECCANICA Non abbiamo adottato soluzioni auto costruite e i pezzi che compongono il robot sono tutti ORIGINALI LEGO. La prima pinza che si è cercato di realizzare funzionava grazie ad una serie di combinazioni tra gli ingranaggi; questo progetto è stato successivamente abbandonato. La pseudo-pinza ora adottata serve semplicemente ad incastrare la lattina fra le due tenaglie per poi, in un secondo momento, attuare un semplice rilascio dell'oggetto tramite una collisione verso il basso con il piedistallo nero. PARTICOLARE PINZA

12 CAP. 5 UNITÀ DI CONTROLLO IL CERVELLO DEL ROBOT PROCESSORE A 32 BIT ATMEL AT91SAM7S256 (CLASSE ARM7) A 48 MHZ COPROCESSORE 8 BIT ATMEL ATMEGA48 (CLASSE AVR: È UN RISC A 8 BIT) A 8 MHZ, CON 4K FLASH E 512 BYTE RAM 256KB MEMORIA FLASH 64KB RAM INTERFACCIA BLUETOOTH V2.0+EDR (CHIPSET CSR BLUECORE 4 VERSION 2, CLOCKATO A 26 MHZ, CON PROPRI BUFFER RAM E FIRMWARE STACK BLUELAB 3.2) VELOCITÀ TEORICA MASSIMA 0,46 MBIT/SEC (PER TRASFERIRE IL SOFTWARE O PER CONTROLLARE IL ROBOT DA REMOTO)
13 DISPLAY LCD BIANCO E NERO DA PIXEL (OGNI PIXEL È CIRCA 0,4 0,4MM); SPEAKER MONO 8 BIT FINO A 16 KHZ; TASTIERA CON QUATTRO TASTI IN GOMMA. 4 PORTE DI INPUT 3 PORTE DI OUTPUT ALIMENTAZIONE CON 6 BATTERIE AA (1.5V)) OPPURE TRAMITE BATTERIA RICARICABILE AL LITIO INTERFACCIA PER PERMETTERE LO SVILUPPO DI PERIFERICHE DA PARTE DI TERZE PARTI.

14 CAP. 6 SENSORI Abbiamo impiegato tre sensori: - 2 sensori di luce per seguire la linea; - 2 sensore ad ultrasuoni ( uno per il rilevamento degli ostacoli; uno per l'individuazione della lattina). SENSORE DI LUCE: È in grado di rilevare la luce riflessa proiettata in precedenza dal LED. Inoltre è in grado di illuminare la zona interessata al rilevamento grazie ad un LED di colore rosso che è puntato verso il basso; ha una scala che va da 0 a100. Si collega all'unità centrale NXT mediante un cavo dati.

15 SENSORE AD ULTRASUONI: È in grado di determinare la distanza di un oggetto mediante onde ad ultrasuoni. Inviando le onde calcola il tempo di andata e ritorno, riuscendo a determinare la sua distanza. Può rilevare oggetti fino ad una distanza massima di 250 cm ed una distanza minima di 6 cm. Si collega all'unità centrale NXT mediante un cavo dati.
16 CAP. 7 ATTUATORI Non abbiamo utilizzato attuatori. CAP. 8 AMBIENTE DI SVILUPPO Per la costruzione e la programmazione del Robot abbiamo usufruito in orario extrascolastico dei laboratori scolastici. Abbiamo utilizzato il software NXT program versione 2.1 Eravamo partiti con l idea di usare il NXC program per la programmazione il Robot, ma per motivi di tempo e di difficoltà di tipo tecnico abbiamo optato per l uso di NXT program.
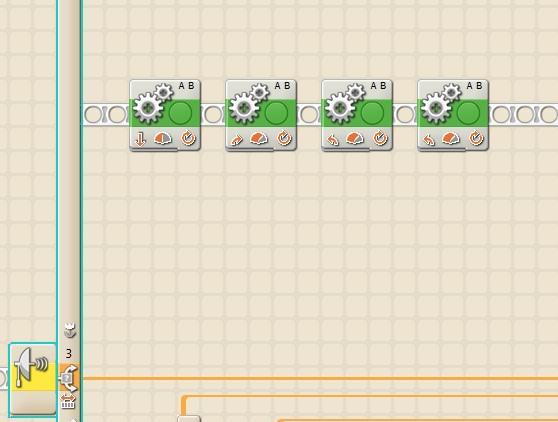
17 CAP. 9 IL PROGRAMMA SOFTWARE IL PROGRAMMA PRINCIPALE È FORMATO DA UNA SERIE DI AZIONI CHE VENGONO A SUSSEGUIRSI ALL INFINITO (SEGUI LA LINEA), CHE VIENE INTERROTTO DAL RILEVAMENTO DA PARTE DEI SENSORI DI ULTRASUONI O DI LUCE DI UN VALORE CHE È ANOMALO (OSTACOLO O CARTA STAGNOLA ALL INGRESSO DELLA TERZA STANZA). A QUESTO PUNTO VIENE VERIFICATO L ENTITÀ DEL VALORE ANOMALO E SI RISPONDE DI CONSEGUENZA: -SE È UN VALORE CHE INDICA UN OSTACOLO DAVANTI AL ROBOT SI PROCEDERÀ CON IL SOTTOPROGRAMMA CHE EVITERÀ QUEST ULTIMO. SEGUI LINEA: -SE È UN VALORE CHE INDICA LA CARTA STAGNOLA SI PROCEDERÀ CON IL SOTTOPROGRAMMA CHE CERCHERÀ LA LATTINA E LA ZONA DI SALVATAGGIO;
 VIENE A RALLENTARE IL MOTORE CHE CONTROLLA, FAVORENDO LA CURVATURA A DESTRA, SE")
18 VENGONO USATI DUE SENSORI DI LUCE CHE CONTROLLANO UNO IL MOTORE DESTRO DEL ROBOT (SENSORE A DESTRA) E L ALTRO IL MOTORE SINISTRO (SENSORE A SINISTRA). QUANDO UNO DEI DUE SENSORI RISCONTRA UN VALORE INFERIORE DI LUCE RISPETTO A QUELLO DEL BIANCO (NEL NOSTRO CASO IL NERO) VIENE A RALLENTARE IL MOTORE CHE CONTROLLA, FAVORENDO LA CURVATURA A DESTRA, SE IL SENSORE DI SINISTRA HA TROVATO LA LINEA NERA, E A SINISTRA SE È IL SENSORE DESTRO A TROVARLA. SCANSAMENTO OSTACOLO: -Destra
19


20 -Sinistra ALL'INTERNO DEL PROGRAMMA CHE PERMETTE AL ROBOT DI SEGUIRE LA LINEA, ABBIAMO INSERITO UN SOTTOPROGRAMMA ALL'INTERNO DEL QUALE IL SENSORE FRONTALE AD ULTRASUONI, QUANDO RIESCE A RILEVARE UN DETERMINATO SEGNALE DI DISTANZA DA UN OSTACOLO, AZIONA I MOTORI PERMETTENDO AL ROBOT DI SCHIVARLO SULLA DESTRA O SULLA SINISTRA. TERZA STANZA :
21 RISCONTRATO IL VALORE DELLA CARTA STAGNOLA, INIZIERÀ IL SOTTOPROGRAMMA DELLA TERZA STANZA CHE PUÒ ESSERE DIVISO IN DUE MOMENTI: -RICERCA E PRESA DELLA LATTINA: GRAZIE AL SENSORE LATERALE DI ULTRASUONI(POSTO SULLA DESTRA DEL ROBOT) IL ROBOT PERLUSTRA LA STANZA IN TUTTA LA SUA LUNGHEZZA IN CERCA DELLA LATTINA. UNA VOLTA TROVATO GIRA IN SENSO ORARIO IN MODO CHE ANCHE IL SENSORE ANTERIORE, SEMPRE DI ULTRASUONI, LA TROVI. UNA VOLTA PUNTATA LA LATTINA IL ROBOT PROSEGUE VERSO DI ESSA FINO A QUANDO NON SARÀ A UNA DISTANZA ADEGUATA PER AFFERRARLA CON LA PINZA. -RICERCA DEL PIEDISTALLO NERO: IL ROBOT ARRETRERÀ FINO ALLA PARETE DIETRO DI SE, COSI DA TROVARSI IN UN LUOGO PIÙ IDENTIFICABILE. INIZIERÀ A PERLUSTRARE OGNI ANGOLO ALLA RICERCA DELLA PEDANA MEDIANTE IL SENSORE DI ULTRASUONI. UNA VOLTA TROVATA POSERÀ LA LATTINA FINENDO LA PROVA.
.")
22 CAP. 10 SORGENTE DI ALIMENTAZIONE Il robot è alimentato da una batteria LEGO ricaricabile ai polimeri di litio, con una tensione di 7.4V e una potenza massima di 1400 MAH (1.4 AH). L alimentatore trasforma la corrente di ingresso di 220V ~ con la frequenza di 50 HZ in 10V ~e 700 MAH (0,7 AH).
23 INDICE P.5 - CAP. 1 - DATI GENERALI P.7 - CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE P.8 - CAP. 3 - NOME E STRUTTURA DEL ROBOT P.11 - CAP. 4 - MECCANICA P.12 - CAP.5 - UNITA' DI CONTROLLO P.14 - CAP.6 - SENSORI P.16 - CAP.7 - ATTUATORI P.16 - CAP.8 - AMBIENTE DI SVILUPPO P.17 - CAP.9 - IL PROGRAMMA SOFTWARE P.22 - CAP.10 - SORGENTE DI ALIMENTAZIONE
ROBOCUP JR ITALIA RIVA DEL GARDA
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
ROBOCUP JR ITALIA 2015
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Rete di scuole per la
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra Another Brick Istituto ITIS Marconi di Gorgonzola La Rete di scuole per la Robocup Jr ITALIA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra Another Brick Istituto ITIS Marconi di Gorgonzola La Rete di scuole per la Robocup Jr ITALIA
Lego Mindstorms NXT è un kit robotico programmabile rilasciato dalla Lego alla fine di Luglio 2006.
 Mindstorms NXT 2.0 Scritto da Prof. S. Giannitto - Amministratore 28/10/2010 Lego Mindstorms NXT è un kit robotico programmabile rilasciato dalla Lego alla fine di Luglio 2006. Rimpiazza il kit Lego Mindstorms
Mindstorms NXT 2.0 Scritto da Prof. S. Giannitto - Amministratore 28/10/2010 Lego Mindstorms NXT è un kit robotico programmabile rilasciato dalla Lego alla fine di Luglio 2006. Rimpiazza il kit Lego Mindstorms
Grande festa della robotica all'iti "Monaco" di Cosenza!
 Grande festa della robotica all'iti "Monaco" di Cosenza! Il 1 Aprile scorso si sono svolte nel nostro Istituto le selezioni territoriali, per il Sud Italia, della rete di robotica 'Robocup Junior', relativamente
Grande festa della robotica all'iti "Monaco" di Cosenza! Il 1 Aprile scorso si sono svolte nel nostro Istituto le selezioni territoriali, per il Sud Italia, della rete di robotica 'Robocup Junior', relativamente
Apprendere la logica programmando Robot ROBOSCUOLA 2012
 Apprendere la logica programmando Robot ROBOSCUOLA 2012 1. Introduzione Autore: Domenico Ardito Docente di Elettronica presso IT Archimede Viale Regina Margherita, 22 95123 Catania (CT) E-mail personale:
Apprendere la logica programmando Robot ROBOSCUOLA 2012 1. Introduzione Autore: Domenico Ardito Docente di Elettronica presso IT Archimede Viale Regina Margherita, 22 95123 Catania (CT) E-mail personale:
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012
 19-21 aprile 2012") ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012 REPORT DI DOCUMENTAZIONE DELLA SQUADRA Galileo Galilei s Robots and Mechanical Men Corporation del LICEO SCIENTIFICO GALILEO GALILEI VIALE BOLOGNINI,
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012 REPORT DI DOCUMENTAZIONE DELLA SQUADRA Galileo Galilei s Robots and Mechanical Men Corporation del LICEO SCIENTIFICO GALILEO GALILEI VIALE BOLOGNINI,
Rete di scuole per la ROBOCUP JR ITALIA. ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
 19-21 aprile") Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) REPORT DI DOCUMENTAZIONE Della squadra: SALENTO Istituto: IIS F. BOTTAZZI dfi CASARANO (LE) 2 IL NOSTRO ISTITUTO 3 La
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) REPORT DI DOCUMENTAZIONE Della squadra: SALENTO Istituto: IIS F. BOTTAZZI dfi CASARANO (LE) 2 IL NOSTRO ISTITUTO 3 La
LE Academy Introduzione alla robotica
 LE Academy Introduzione alla robotica 12 Febbraio 2014 Villafranca (VR) Alberti Pietro Breve storia di LEGO Education Anno di fondazione 1980. Sede della divisione Ricerca e sviluppo in Danimarca Offerta
LE Academy Introduzione alla robotica 12 Febbraio 2014 Villafranca (VR) Alberti Pietro Breve storia di LEGO Education Anno di fondazione 1980. Sede della divisione Ricerca e sviluppo in Danimarca Offerta
Sistema di risparmio energetico aziendale Documento di Analisi della gestione dell illuminazione
 Sistema di risparmio energetico aziendale Documento di Analisi della gestione dell illuminazione Descrizione gestione dell illuminazione Nell ambito dello sviluppo di un sistema di risparmio energetico,
Sistema di risparmio energetico aziendale Documento di Analisi della gestione dell illuminazione Descrizione gestione dell illuminazione Nell ambito dello sviluppo di un sistema di risparmio energetico,
V -TECH V-TECH V -TECH. La gamma delle centraline V 0 -Tech V-Tech e. V 3 -Tech è stata pensata per soddisfare ogni
 0 V -TECH V-TECH H 3 V -TECH GESTIONE SEQUENZIALE La gamma delle centraline V 0 -Tech V-Tech e GESTIONE SEQUENZIALE V 3 -Tech è stata pensata per soddisfare ogni esigenza di controllo dell iniezione. L
0 V -TECH V-TECH H 3 V -TECH GESTIONE SEQUENZIALE La gamma delle centraline V 0 -Tech V-Tech e GESTIONE SEQUENZIALE V 3 -Tech è stata pensata per soddisfare ogni esigenza di controllo dell iniezione. L
Tastierini HomeWorks QS Dynamic
 HomeWorks QS I tastierini racchiudono le funzionalità di più tastierini Lutron in un unico strumento intuitivo e facile da usare. Aiutano infatti a ridurre la confusione e il disordine sulla parete, riunendo
HomeWorks QS I tastierini racchiudono le funzionalità di più tastierini Lutron in un unico strumento intuitivo e facile da usare. Aiutano infatti a ridurre la confusione e il disordine sulla parete, riunendo
BLUETOOTH FURNIBUS ADAPTER
 BLUETOOTH FURNIBUS ADAPTER Page 1/21 - stand of 11/2015 Bluetooth per comando di attuatori dotati di interfaccia FURNIBUS tramite telefono cellulare o tablet PC. BLUETOOTH FURNIBUS ADAPTER Page 2/21 -
BLUETOOTH FURNIBUS ADAPTER Page 1/21 - stand of 11/2015 Bluetooth per comando di attuatori dotati di interfaccia FURNIBUS tramite telefono cellulare o tablet PC. BLUETOOTH FURNIBUS ADAPTER Page 2/21 -
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra: Team LMT Istituto: I.T.I.S A.Rossi ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra: Team LMT Istituto: I.T.I.S A.Rossi ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
Raccolta dati wireless in libertà
 Raccolta dati wireless in libertà 02 Con Nylux non ci sono limiti. 03 Sistemi operativi in continuo cambiamento? Problemi di incompatibilità? Costi pesanti per l'adeguamento? Oggi Nylux vi libera da un
Raccolta dati wireless in libertà 02 Con Nylux non ci sono limiti. 03 Sistemi operativi in continuo cambiamento? Problemi di incompatibilità? Costi pesanti per l'adeguamento? Oggi Nylux vi libera da un
TAGLIAERBA RADIOCOMANDATO
 TAGLIAERBA 1 RADIOCOMANDATO INDICE 2 Progetto... Pag. 3 Realizzazione.. Pag. 6 Fase 1: Scelta dei materiali per la struttura... Pag. 7 Fase 2: Scelta dei motori.... Pag. 8 Fase 3: Scelta dei componenti
TAGLIAERBA 1 RADIOCOMANDATO INDICE 2 Progetto... Pag. 3 Realizzazione.. Pag. 6 Fase 1: Scelta dei materiali per la struttura... Pag. 7 Fase 2: Scelta dei motori.... Pag. 8 Fase 3: Scelta dei componenti
HP DESKJET 3000. Funzioni
 HP DESKJET 3000 La stampante a getto d'inchiostro a colori HP Deskjet serie 3000 è progettata per clienti molto impegnati, come utenti che portano il lavoro a casa e quindi apprezzano la possibilità di
HP DESKJET 3000 La stampante a getto d'inchiostro a colori HP Deskjet serie 3000 è progettata per clienti molto impegnati, come utenti che portano il lavoro a casa e quindi apprezzano la possibilità di
Dell Latitude 2110. Informazioni sui messaggi di Avvertenza AVVERTENZA: Un messaggio di AVVISO indica un rischio di
 Dell Latitude 2110 Informazioni sull'installazione e sulle funzionalità Informazioni sui messaggi di Avvertenza AVVERTENZA: Un messaggio di AVVISO indica un rischio di danni alla proprietà, lesioni personali
Dell Latitude 2110 Informazioni sull'installazione e sulle funzionalità Informazioni sui messaggi di Avvertenza AVVERTENZA: Un messaggio di AVVISO indica un rischio di danni alla proprietà, lesioni personali
Programma di Robotica[LEGO EV3]
![Programma di Robotica[LEGO EV3]](/thumbs/39/19338690.jpg "Programma di Robotica[LEGO EV3]") Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
EcoRemote SISTEMA DI GESTIONE DI UNA STAZIONE DI MONITORAGGIO DELLA QUALITÀ DELL ARIA. Ingegneria dei sistemi
 Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Seguendo alla lettera le istruzioni del presente manuale l automazione funzionerà perfettamente senza dare problemi.
 SPAZIO INNOVAZIONI Srl Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza
SPAZIO INNOVAZIONI Srl Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza
Leica DISTO D3a / BT Misure rivoluzionarie e precise
 Leica DISTO Da / BT Misure rivoluzionarie e precise Leica DISTO Da È davvero così preciso? Con una precisione di misura di ±,0 mm Leica DISTO Da garantisce misure perfette con la semplice pressione di
Leica DISTO Da / BT Misure rivoluzionarie e precise Leica DISTO Da È davvero così preciso? Con una precisione di misura di ±,0 mm Leica DISTO Da garantisce misure perfette con la semplice pressione di
Sistema antintrusione Vimar
 24 V 1 2 3 12 V 12 V 230 V 10 12 16887 PRI 230 V 50 Hz SEC 12-12 - 24 V 18-18 - 24 VA ta 25 C IP40 F Microfono SISTEMA ANTINTRUSIONE 32 Idea Sistema antintrusione Vimar Prodotti al microscopio di Francesco
24 V 1 2 3 12 V 12 V 230 V 10 12 16887 PRI 230 V 50 Hz SEC 12-12 - 24 V 18-18 - 24 VA ta 25 C IP40 F Microfono SISTEMA ANTINTRUSIONE 32 Idea Sistema antintrusione Vimar Prodotti al microscopio di Francesco
IC PIANEZZA. Via Manzoni 5 PIANEZZA
 IC PIANEZZA Via Manzoni 5 PIANEZZA CAPITOLATO TECNICO del DISCIPLINARE DI GARA Prot.n. 1633/C14 del 17/03/2016 Progetto 1 9035 del 13/7/2015 FESR realizzazione /ampliamento rete LAN/Wlan CIG: - ZDF1909968
IC PIANEZZA Via Manzoni 5 PIANEZZA CAPITOLATO TECNICO del DISCIPLINARE DI GARA Prot.n. 1633/C14 del 17/03/2016 Progetto 1 9035 del 13/7/2015 FESR realizzazione /ampliamento rete LAN/Wlan CIG: - ZDF1909968
velum wls DATASHEET Rilevatore di Movimento Doppia Tecnologia a Tenda per esterno con antimascheramento Wireless 868 Mhz Bi-Direzionale KSI5402010.
 velum wls Rilevatore di Movimento Doppia Tecnologia a Tenda per esterno con antimascheramento Wireless 868 Mhz Bi-Direzionale KSI540200.303 CARATTERISTICHE PRINCIPALI I I rilevatori di movimento velum
velum wls Rilevatore di Movimento Doppia Tecnologia a Tenda per esterno con antimascheramento Wireless 868 Mhz Bi-Direzionale KSI540200.303 CARATTERISTICHE PRINCIPALI I I rilevatori di movimento velum
FC8 Sensore ultrasonico a forcella per etichette. Sensori Ultrasonici
 Sensore ultrasonico a forcella per etichette Sensori Ultrasonici Catalogo Cod. CAT3IFC1372401 Catalogo italiano Ed.01/2013 2/3 Prodotti forcelle Serie Forcella www.microdetectors.com Settori di mercato
Sensore ultrasonico a forcella per etichette Sensori Ultrasonici Catalogo Cod. CAT3IFC1372401 Catalogo italiano Ed.01/2013 2/3 Prodotti forcelle Serie Forcella www.microdetectors.com Settori di mercato
Vivi la tua casa in tutta sicurezza
 Vivi la tua casa in tutta sicurezza Sistemi domotici di sicurezza per finestre Un vantaggio assoluto Valorizzazione dell immobile: valore aggiunto anche per aumentare la vendita o l affitto Facile da usare:
Vivi la tua casa in tutta sicurezza Sistemi domotici di sicurezza per finestre Un vantaggio assoluto Valorizzazione dell immobile: valore aggiunto anche per aumentare la vendita o l affitto Facile da usare:
Dati generali della procedura. PON FESR Ambienti Digitali 10.8.1.A3-FESRPON-PU-2015-248 Criterio di aggiudicazione:
 1/9 Dati generali della procedura Numero RDO: 1196569 Descrizione RDO: PON FESR Ambienti Digitali 10.8.1.A3-FESRPON-PU-2015-248 Criterio di aggiudicazione: Prezzo piu' basso Numero di Lotti: 2 Unita' di
1/9 Dati generali della procedura Numero RDO: 1196569 Descrizione RDO: PON FESR Ambienti Digitali 10.8.1.A3-FESRPON-PU-2015-248 Criterio di aggiudicazione: Prezzo piu' basso Numero di Lotti: 2 Unita' di
- Memoria interna flash e scheda SD da 2 - Software SoftPCE opzionale
 Torsiometro universale PCE-MMT E torsiometro universale per sistemi e ingegneria meccanica / 1... 5000 Nm / protezione IP 64 / frequenza 50... 2000 Hz / differenti sensori con TEDS memoria interna flash
Torsiometro universale PCE-MMT E torsiometro universale per sistemi e ingegneria meccanica / 1... 5000 Nm / protezione IP 64 / frequenza 50... 2000 Hz / differenti sensori con TEDS memoria interna flash
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Blade Runner Istituto J.C.MAXWELL Milano La Rete di scuole per la
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Blade Runner Istituto J.C.MAXWELL Milano La Rete di scuole per la
Elegante compagno che unisce potenza e sicurezza avanzata. Sito Web ufficiale di VAIO Europe http://www.vaiopro.eu/
 VGN-SR49XN/H Il compagno per i tuoi spostamenti Elegante compagno che unisce potenza e sicurezza avanzata Sito Web ufficiale di VAIO Europe http://www.vaio.eu/ Sito Web ufficiale di VAIO Europe http://www.vaiopro.eu/
VGN-SR49XN/H Il compagno per i tuoi spostamenti Elegante compagno che unisce potenza e sicurezza avanzata Sito Web ufficiale di VAIO Europe http://www.vaio.eu/ Sito Web ufficiale di VAIO Europe http://www.vaiopro.eu/
Integrata No Si Linux Mast. CD-RW/DVD-RW DL Grigio da 2 Kg a 4 Kg 6 celle
 ACER NB TM5335 T3500 2GB 320GB 15,6" DVD-RW LINUX Genova Market è un prodotto di EsseBi Tecnologia di Brizzante Stefano www.genovamarket.it info@genovamarket.it Tel.:3338805881 P.I.:00358578888 Cod. LX.V0E0C.002
ACER NB TM5335 T3500 2GB 320GB 15,6" DVD-RW LINUX Genova Market è un prodotto di EsseBi Tecnologia di Brizzante Stefano www.genovamarket.it info@genovamarket.it Tel.:3338805881 P.I.:00358578888 Cod. LX.V0E0C.002
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Delle squadre GREEKBOTS e NEVERLAND Istituto I.I.S. MARCONI GALLETTI DOMODOSSOLA ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Delle squadre GREEKBOTS e NEVERLAND Istituto I.I.S. MARCONI GALLETTI DOMODOSSOLA ROBOCUP JR ITALIA 2011 - Catania 14-16
OGGETTO: OFFERTA TECNICA RELATIVA ALLA GARA PER LA CONCESSIONE DEL SERVIZIO DI GESTIONE DELLA CIVICA SCUOLA DI MUSICA DI ARESE
 ALLEGATO B (DA PRESENTARE NEL PLICO, DENTRO LA SECONDA BUSTA B). Al Comune di Arese Via Roma, 2 20020 Arese (MI) OGGETTO: OFFERTA TECNICA RELATIVA ALLA GARA PER LA CONCESSIONE DEL SERVIZIO DI GESTIONE
ALLEGATO B (DA PRESENTARE NEL PLICO, DENTRO LA SECONDA BUSTA B). Al Comune di Arese Via Roma, 2 20020 Arese (MI) OGGETTO: OFFERTA TECNICA RELATIVA ALLA GARA PER LA CONCESSIONE DEL SERVIZIO DI GESTIONE
Audio. products. Via Enrico Fermi 34 39100 Bolzano Tel. 0471 543 777 Fax 0471 543 740 info@mediasat.com www.mediasat.com
 Audio products Via Enrico Fermi 34 39100 Bolzano Tel. 0471 543 777 Fax 0471 543 740 info@mediasat.com www.mediasat.com PS 4011 R Mini Speaker attivo Amplificatore digitale per un suono preciso Caricabile
Audio products Via Enrico Fermi 34 39100 Bolzano Tel. 0471 543 777 Fax 0471 543 740 info@mediasat.com www.mediasat.com PS 4011 R Mini Speaker attivo Amplificatore digitale per un suono preciso Caricabile
CARATTERISTICHE TECNICHE :
 KDQ-BVB Bilancia digitale, adatta per applicazioni avanzate di controllo statistico di preconfezionati (come da DPR 26/5/80 n 391 della legge 25/10/78 n 690), gestione dati e stampe. Collegamento fino
KDQ-BVB Bilancia digitale, adatta per applicazioni avanzate di controllo statistico di preconfezionati (come da DPR 26/5/80 n 391 della legge 25/10/78 n 690), gestione dati e stampe. Collegamento fino
Centrale M-Bus. Impiego. Funzioni. Maggio 1996
 s Maggio 1996 5 362 Centrale M-Bus OZW10 Centrale per la concentrazione dei dati dei misuratori. I dati vengono memorizzati in modo imperdibile per la lettura diretta e/o a posteriore tramite la scheda
s Maggio 1996 5 362 Centrale M-Bus OZW10 Centrale per la concentrazione dei dati dei misuratori. I dati vengono memorizzati in modo imperdibile per la lettura diretta e/o a posteriore tramite la scheda
Introduzione alle macchine a stati (non definitivo)
") Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
UNO SGUARDO ALL ELETTRONICA
 UNO SGUARDO ALL ELETTRONICA DESCRIZIONE TECNICA 12 Prima di passare alle prossime istruzioni di montaggio, diamo un occhiata un po più da vicino alle principali schede elettroniche di cui sarà dotato I-Droid01.
UNO SGUARDO ALL ELETTRONICA DESCRIZIONE TECNICA 12 Prima di passare alle prossime istruzioni di montaggio, diamo un occhiata un po più da vicino alle principali schede elettroniche di cui sarà dotato I-Droid01.
AiM Infotech. Sensore velocità auto. Versione 1.02
 AiM Infotech Sensore velocità auto Versione 1.02 Questo datasheet spiega come utilizzare il sensore velocità auto AiM. Il codice prodotto di questo sensore è: X05SNVS00 1 Introduzione Gli strumenti AiM
AiM Infotech Sensore velocità auto Versione 1.02 Questo datasheet spiega come utilizzare il sensore velocità auto AiM. Il codice prodotto di questo sensore è: X05SNVS00 1 Introduzione Gli strumenti AiM
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
TERMINALI PER IL RILEVAMENTO PRESENZE LBX 2780 FOGLIO
 TERMINALI PER IL RILEVAMENTO PRESENZE LBX 2780 FOGLIO Potente e dal design sofisticato Una gamma diversificata di terminali è la risposta di Solari alle esigenze più diverse ed articolate del mercato.
TERMINALI PER IL RILEVAMENTO PRESENZE LBX 2780 FOGLIO Potente e dal design sofisticato Una gamma diversificata di terminali è la risposta di Solari alle esigenze più diverse ed articolate del mercato.
Motori Motore passo-passo Stadio di potenza PWM Sincrono Stadio di potenza del motore passopasso. Blocchi funzionali. Set point e generatore PWM
 RC1 Blocchi funzionai Motori a corrente continua Generatori Circuiti per il controllo dei motori in CC Motori a corrente alternata Circuiti per il controllo dei motori in CA Motori passo-passo Circuiti
RC1 Blocchi funzionai Motori a corrente continua Generatori Circuiti per il controllo dei motori in CC Motori a corrente alternata Circuiti per il controllo dei motori in CA Motori passo-passo Circuiti
consegnare mediamente 8 esercizi a settimana per 7 settimane su 10
 T.D.P. - I compiti sono da consegnare settimanalmente a scuola (a mano o lettera o e-mail) all attenzione di Prof. Bolley e Prof. Di Ninno consegnare mediamente 8 esercizi a settimana per 7 settimane su
T.D.P. - I compiti sono da consegnare settimanalmente a scuola (a mano o lettera o e-mail) all attenzione di Prof. Bolley e Prof. Di Ninno consegnare mediamente 8 esercizi a settimana per 7 settimane su
SPECIFICHE TERMINALI RILEVAZIONE PRESENZE E CONTROLLO ACCESSI
 Procedura Aperta per la fornitura del servizio di manutenzione, supporto operativo e assistenza specialistica del sistema informativo per l'area risorse umane (SI HR) della Regione Basilicata 2016 2021.
Procedura Aperta per la fornitura del servizio di manutenzione, supporto operativo e assistenza specialistica del sistema informativo per l'area risorse umane (SI HR) della Regione Basilicata 2016 2021.
La ginnastica aerobica a scuola
 Corso provinciale di aggiornamento Per gli docenti di Educazione Fisica e di sostegno con diploma ISEF o laurea in Scienze Motorie della scuola secondaria di I e II grado La ginnastica aerobica a scuola
Corso provinciale di aggiornamento Per gli docenti di Educazione Fisica e di sostegno con diploma ISEF o laurea in Scienze Motorie della scuola secondaria di I e II grado La ginnastica aerobica a scuola
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile REPORT DI DOCUMENTAZIONE della squadra SKINWIRES Istituto ITIS G.CHILESOTTI Thiene (VI) ROBOCUP JR ITALIA 2011 - Catania
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile REPORT DI DOCUMENTAZIONE della squadra SKINWIRES Istituto ITIS G.CHILESOTTI Thiene (VI) ROBOCUP JR ITALIA 2011 - Catania
1. CONNESSIONE DI APPARECCHI LED IN BASE
 . COESSIOE DI APPARECCHI ED I BASE AA ORO AIMETAZIOE Gli apparecchi illuminanti a ED possono essere alimentati secondo tre diversi sistemi di alimentazione Con tensione di rete a -40VAC Con alimentatori
. COESSIOE DI APPARECCHI ED I BASE AA ORO AIMETAZIOE Gli apparecchi illuminanti a ED possono essere alimentati secondo tre diversi sistemi di alimentazione Con tensione di rete a -40VAC Con alimentatori
Realizzazione di un robot olonomo
 UNIVERSITÀ DI BRESCIA FACOLTÀ DI INGEGNERIA Dipartimento di Ingegneria dell Informazione Laboratorio di Robotica Avanzata Advanced Robotics Laboratory Corso di Robotica (Prof. Riccardo Cassinis) Realizzazione
UNIVERSITÀ DI BRESCIA FACOLTÀ DI INGEGNERIA Dipartimento di Ingegneria dell Informazione Laboratorio di Robotica Avanzata Advanced Robotics Laboratory Corso di Robotica (Prof. Riccardo Cassinis) Realizzazione
Pro Xpc Auto. Pistola a spruzzatura pneumatica elettrostatica automatica QUALITÀ COLLAUDATA. TECNOLOGIA ALL AVANGUARDIA.
 Pro Xpc Auto Pistola a spruzzatura pneumatica elettrostatica automatica QUALITÀ COLLAUDATA. TECNOLOGIA ALL AVANGUARDIA. Informazioni per l ordine La nuova eccellenza nel settore La pistola elettrostatica
Pro Xpc Auto Pistola a spruzzatura pneumatica elettrostatica automatica QUALITÀ COLLAUDATA. TECNOLOGIA ALL AVANGUARDIA. Informazioni per l ordine La nuova eccellenza nel settore La pistola elettrostatica
REGOLAMENTO SCUOLE DI RIFERIMENTO NAZIONALE S I C
 Società Italiana di Chirurgia REGOLAMENTO SCUOLE DI RIFERIMENTO NAZIONALE S I C (26/09/2013) Art.1 DEFINIZIONE E OBIETTIVI Le Scuole di Riferimento Nazionale SIC sono centri di formazione continua dei
Società Italiana di Chirurgia REGOLAMENTO SCUOLE DI RIFERIMENTO NAZIONALE S I C (26/09/2013) Art.1 DEFINIZIONE E OBIETTIVI Le Scuole di Riferimento Nazionale SIC sono centri di formazione continua dei
LE CLASSI DALLA PRIMA ALLA QUINTA
 Nell Anno Scolastico 2014/2015 è entrato in vigore il Nuovo Ordinamento Il DPR 263 in vigore dal 25/02/2013 ha dato l avvio alla riforma dei CPIA e dei corsi serali attivi nelle scuola secondarie superiori.
Nell Anno Scolastico 2014/2015 è entrato in vigore il Nuovo Ordinamento Il DPR 263 in vigore dal 25/02/2013 ha dato l avvio alla riforma dei CPIA e dei corsi serali attivi nelle scuola secondarie superiori.
MINISTERO DELLA PUBBLICA ISTRUZIONE ISTITUTO TECNICO INDUSTRIALE. ARTURO MALIGNANI - UDINE Viale Leonardo da Vinci, 10 33100 Udine
 MINISTERO DELLA PUBBLICA ISTRUZIONE ISTITUTO TECNICO INDUSTRIALE ARTURO MALIGNANI - UDINE Viale Leonardo da Vinci, 0 00 Udine Gara Nazionale di Elettronica e Telecomunicazioni Udine, mercoledì 0 dicembre
MINISTERO DELLA PUBBLICA ISTRUZIONE ISTITUTO TECNICO INDUSTRIALE ARTURO MALIGNANI - UDINE Viale Leonardo da Vinci, 0 00 Udine Gara Nazionale di Elettronica e Telecomunicazioni Udine, mercoledì 0 dicembre
Sistema di misurazione distanza ed anticollisione
 Sistema di misurazione distanza ed anticollisione LPR-1DP/2 LPR-1DP Area virtuale di stop Area virtuale di stop LPR-1DXi Regolatore e sensore di distanza semplice e veloce misurazione della posizione misurazione
Sistema di misurazione distanza ed anticollisione LPR-1DP/2 LPR-1DP Area virtuale di stop Area virtuale di stop LPR-1DXi Regolatore e sensore di distanza semplice e veloce misurazione della posizione misurazione
1. Contenuti della confezione. 2. Visualizzazione del prodotto
 1. Contenuti della confezione 1. 2. adattatore per corrente 3. Custodia 4. Cavo USB 5. 6. Certificato di garanzia 7. Info legali e precauzioni d uso 2. Visualizzazione del prodotto 15 16 3 4 5 6 1 2 13
1. Contenuti della confezione 1. 2. adattatore per corrente 3. Custodia 4. Cavo USB 5. 6. Certificato di garanzia 7. Info legali e precauzioni d uso 2. Visualizzazione del prodotto 15 16 3 4 5 6 1 2 13
A SCUOLA DI INNOVAZIONE 383 MILIONI DI EURO PER PIÙ QUALITÀ E INNOVAZIONE PER GLI STUDENTI LOMBARDI
 A SCUOLA DI INNOVAZIONE 383 MILIONI DI EURO PER PIÙ QUALITÀ E INNOVAZIONE PER GLI STUDENTI LOMBARDI 383 MILIONI DI EURO PER LE DOTI E INNOVAZIONE A SCUOLA Regione Lombardia ha stanziato 383 milioni di
A SCUOLA DI INNOVAZIONE 383 MILIONI DI EURO PER PIÙ QUALITÀ E INNOVAZIONE PER GLI STUDENTI LOMBARDI 383 MILIONI DI EURO PER LE DOTI E INNOVAZIONE A SCUOLA Regione Lombardia ha stanziato 383 milioni di
TIPO VEICOLO: SKODA OCTAVIA 1.6 TIPO INIEZIONE: Multipoint Bosch Simons SIGLA MOTORE: AEH - AHL - AKL ANNO DI FABBRICAZIONE: 9/98
 MATERIALE OCCORRENTE: Kit IGS 4 cilindri (Cod. 604702000) File: Octavia_16_98_74kW_G_006.s19 Emulatore LR 25 (Cod. 628071000) Serbatoi consigliati (toroidale lt.57 Ø 220 x 650 - cilindrico lt. 80 Ø 360
MATERIALE OCCORRENTE: Kit IGS 4 cilindri (Cod. 604702000) File: Octavia_16_98_74kW_G_006.s19 Emulatore LR 25 (Cod. 628071000) Serbatoi consigliati (toroidale lt.57 Ø 220 x 650 - cilindrico lt. 80 Ø 360
SINTESI ROBOTIC STORAGE SYSTEMS
 1 SINTESI ROBOTIC STORAGE SYSTEMS PHARMATHEK SINTESI: LA TECNOLOGIA FLEXIPICKING 2 3 SINTESI È IL CONNUBIO TRA TECNOLOGIA E SAPER FARE DI PHARMATHEK SINTESI È CONCEPITO PER RISPONDERE A 5 NECESSITÀ ESSENZIALI
1 SINTESI ROBOTIC STORAGE SYSTEMS PHARMATHEK SINTESI: LA TECNOLOGIA FLEXIPICKING 2 3 SINTESI È IL CONNUBIO TRA TECNOLOGIA E SAPER FARE DI PHARMATHEK SINTESI È CONCEPITO PER RISPONDERE A 5 NECESSITÀ ESSENZIALI
WIN 3 / PROFIBUS. Amplificatore digitale per celle di carico con interfaccia PROFIBUS DP-V1... ITALIANO [Pag. 2-3]
![WIN 3 / PROFIBUS. Amplificatore digitale per celle di carico con interfaccia PROFIBUS DP-V1... ITALIANO [Pag. 2-3]](/thumbs/39/19784887.jpg "WIN 3 / PROFIBUS. Amplificatore digitale per celle di carico con interfaccia PROFIBUS DP-V1... ITALIANO [Pag. 2-3]") WIN / PROFIBUS Amplificatore digitale per celle di carico con interfaccia PROFIBUS DP-V1... ITALIANO [Pag. -] Load cells digital amplifier with PROFIBUS DP-V1 interface... ENGLISH [Pag. 4-5] Display di
WIN / PROFIBUS Amplificatore digitale per celle di carico con interfaccia PROFIBUS DP-V1... ITALIANO [Pag. -] Load cells digital amplifier with PROFIBUS DP-V1 interface... ENGLISH [Pag. 4-5] Display di
Originali Bosch! Trasferimento digitale diretto. dei dati di misurazione
 Originali Bosch! Trasferimento digitale diretto dei dati di misurazione NOVITÀ! Distanziometro laser GLM 100 C Professional e App La soluzione intelligente per trasferire e documentare i vostri risultati
Originali Bosch! Trasferimento digitale diretto dei dati di misurazione NOVITÀ! Distanziometro laser GLM 100 C Professional e App La soluzione intelligente per trasferire e documentare i vostri risultati
CORSI PROFESSIONALI SPECIALIZZATI E LAVORA SUBITO MATCH ANALYST. Certificazione Sistemi di Gestione Qualità ISO 9001 I EDIZIONE
 SPECIALIZZATI E LAVORA SUBITO CORSI PROFESSIONALI MATCH ANALYST I EDIZIONE Certificazione Sistemi di Gestione Qualità ISO 9001 168 MATCH ANALYST Il match analyst, detto anche video analista tattico, è
SPECIALIZZATI E LAVORA SUBITO CORSI PROFESSIONALI MATCH ANALYST I EDIZIONE Certificazione Sistemi di Gestione Qualità ISO 9001 168 MATCH ANALYST Il match analyst, detto anche video analista tattico, è
Problematiche generali connesse con l'integrazione scolastica degli alunni disabili o con i bisogni educativi speciali"
 Piano di formazione del personale docente neoassunto a.s. 2015-16 Scuola Polo I.I.S. "FERRARIS-BRUNELLESCHI", Empoli LABORATORIO FORMATIVO Problematiche generali connesse con l'integrazione scolastica
Piano di formazione del personale docente neoassunto a.s. 2015-16 Scuola Polo I.I.S. "FERRARIS-BRUNELLESCHI", Empoli LABORATORIO FORMATIVO Problematiche generali connesse con l'integrazione scolastica
Automazioni per cancelli scorrevoli
 Automazioni per cancelli scorrevoli Residenziale C720 740 741 C721 746 Condominiale C721 746 844 reversibile 844 Industriale 844 reversibile 844 844 3Ph 884 3Ph peso max anta (kg) 400 500 900 800 600 1.000
Automazioni per cancelli scorrevoli Residenziale C720 740 741 C721 746 Condominiale C721 746 844 reversibile 844 Industriale 844 reversibile 844 844 3Ph 884 3Ph peso max anta (kg) 400 500 900 800 600 1.000
SOLUZIONI INNOVATIVE FINALIZZATE AL RISPARMIO ENERGETICO
 SOLUZIONI INNOVATIVE FINALIZZATE AL RISPARMIO ENERGETICO Ventilazione Meccanica Controllata Puntuale con Recuperatore di calore Ventilazione Meccanica Controllata Puntuale con Recuperatore di calore La
SOLUZIONI INNOVATIVE FINALIZZATE AL RISPARMIO ENERGETICO Ventilazione Meccanica Controllata Puntuale con Recuperatore di calore Ventilazione Meccanica Controllata Puntuale con Recuperatore di calore La
Arduino UNO. Single board microcontroller
 Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
CATALOGO IMPIANTO TELEVISIVO COMVISION 2010
 CATALOGO IMPIANTO TELEVISIVO COMVISION 2010 SECOM SRL Via Porta Romana, 18-44121 Ferrara Tel. 0532/65200-67227 Fax 0532/65555 e-mail: info@secomsrl.net Tutti i diritti riservati A cura di: Secom srl Via
CATALOGO IMPIANTO TELEVISIVO COMVISION 2010 SECOM SRL Via Porta Romana, 18-44121 Ferrara Tel. 0532/65200-67227 Fax 0532/65555 e-mail: info@secomsrl.net Tutti i diritti riservati A cura di: Secom srl Via
EFA Automazione S.r.l. SB3Conf Help V1.00 (01 ITA).doc pag. 1 / 10
.doc pag. 1 / 10") EFA Automazione S.r.l. SB3Conf Help V1.00 (01 ITA).doc pag. 1 / 10 SOMMARIO Requisiti software pag. 2 Istruzioni per l installazione pag. 2 Avvio del Configuratore pag. 2 Creazione di un nuovo progetto
EFA Automazione S.r.l. SB3Conf Help V1.00 (01 ITA).doc pag. 1 / 10 SOMMARIO Requisiti software pag. 2 Istruzioni per l installazione pag. 2 Avvio del Configuratore pag. 2 Creazione di un nuovo progetto
Scheda tecnica online. WTR1-P921B10 ZoneControl FOTOCELLULE A TASTEGGIO E SBARRAMENTO
 Scheda tecnica online WTR1-P921B10 ZoneControl A B C D E F L'immagine potrebbe non corrispondere Dati tecnici in dettaglio Caratteristiche Informazioni per l'ordine Tipo Cod. art. WTR1-P921B10 1025392
Scheda tecnica online WTR1-P921B10 ZoneControl A B C D E F L'immagine potrebbe non corrispondere Dati tecnici in dettaglio Caratteristiche Informazioni per l'ordine Tipo Cod. art. WTR1-P921B10 1025392
Il Bollino GRIN: coordinamento nazionale per le lauree di informatica
 Il Bollino GRIN: coordinamento nazionale per le lauree di informatica Prof. Enrico Nardelli Presidente GRIN (Associazione Italiana Docenti Universitari di Informatica) http://www.di.unipi.it/grin Verona,
Il Bollino GRIN: coordinamento nazionale per le lauree di informatica Prof. Enrico Nardelli Presidente GRIN (Associazione Italiana Docenti Universitari di Informatica) http://www.di.unipi.it/grin Verona,
GM grafica & multimedia
 GM grafica & multimedia ANDREA FANTONI L Arte di Fare Scuola dal 1898 Scuola d Arte Andrea Fantoni Quella della Scuola Fantoni è una storia dalle radici antiche: tradizione, cultura e innovazione sono
GM grafica & multimedia ANDREA FANTONI L Arte di Fare Scuola dal 1898 Scuola d Arte Andrea Fantoni Quella della Scuola Fantoni è una storia dalle radici antiche: tradizione, cultura e innovazione sono
La nuova generazione (NXT) di
 di") moria flash, 64Kbyte di RAM e clock a 48MHz. Un coprocessore Atmel AVR ad 8bit con 4Kbyte di memoria flash e 512Byte di RAM. Un CSR BlueCore 4, con 47Kbyte di RAM interna, memoria flash esterna ad 8Mbit
moria flash, 64Kbyte di RAM e clock a 48MHz. Un coprocessore Atmel AVR ad 8bit con 4Kbyte di memoria flash e 512Byte di RAM. Un CSR BlueCore 4, con 47Kbyte di RAM interna, memoria flash esterna ad 8Mbit
Gruppo di continuità UPS stand-alone. PowerValue 31/11 T da 10 a 20 kva UPS monofase per applicazioni critiche
 Gruppo di continuità UPS stand-alone PowerValue 31/11 T da 10 a 20 kva UPS monofase per applicazioni critiche Un efficiente gruppo di continuità (UPS) con autonomia scalabile Un alimentazione elettrica
Gruppo di continuità UPS stand-alone PowerValue 31/11 T da 10 a 20 kva UPS monofase per applicazioni critiche Un efficiente gruppo di continuità (UPS) con autonomia scalabile Un alimentazione elettrica
Premio A scuola di innovazione. Bando di partecipazione
 Premio A scuola di innovazione Bando di partecipazione 1 Che cos è il Premio E un iniziativa promossa dal Ministero per la Pubblica Amministrazione e l Innovazione - Dipartimento per la digitalizzazione
Premio A scuola di innovazione Bando di partecipazione 1 Che cos è il Premio E un iniziativa promossa dal Ministero per la Pubblica Amministrazione e l Innovazione - Dipartimento per la digitalizzazione
CS2000 Sistemi di conferenza
 CS2000 Sistemi di conferenza CS2100 Sistema per discussione e votazione II sistema per conferenze CS2100 consente la gestione automatica fino ad un massimo di 100 postazioni. Tutte le operazioni possono
CS2000 Sistemi di conferenza CS2100 Sistema per discussione e votazione II sistema per conferenze CS2100 consente la gestione automatica fino ad un massimo di 100 postazioni. Tutte le operazioni possono
Tutta la strumentazione per il tuo laboratorio
 S t r u me n t a z i o n e Tutta la strumentazione per il tuo laboratorio Una vasta gamma di strumenti di misura per tutte le esigenze, dal laboratorio professionale all angolo dell hobbista Oscilloscopio-generatore
S t r u me n t a z i o n e Tutta la strumentazione per il tuo laboratorio Una vasta gamma di strumenti di misura per tutte le esigenze, dal laboratorio professionale all angolo dell hobbista Oscilloscopio-generatore
Il notebook HP 630 è basato sul microprocessore Intel Celeron Dual Core B800 con frequenza di clock a 1,50 GHz e 2 MB di cache L3.
 Il notebook HP 630 è basato sul microprocessore Intel Celeron Dual Core B800 con frequenza di clock a 1,50 GHz e 2 MB di cache L3. Dispone di 2 GB di memoria SODIMM DDR3 a 1066 MHz espandibile fino ad
Il notebook HP 630 è basato sul microprocessore Intel Celeron Dual Core B800 con frequenza di clock a 1,50 GHz e 2 MB di cache L3. Dispone di 2 GB di memoria SODIMM DDR3 a 1066 MHz espandibile fino ad
l notebook ACER AS5750-2314G64Mnkk è basato sul microprocessore Intel Core i3-2310m con frequenza di clock a 2,10 GHz e 3 MB di cache L3.
 l notebook ACER AS5750-2314G64Mnkk è basato sul microprocessore Intel Core i3-2310m con frequenza di clock a 2,10 GHz e 3 MB di cache L3. Dispone di 4 GB di memoria su moduli SODIMM DDR3 espandibile fino
l notebook ACER AS5750-2314G64Mnkk è basato sul microprocessore Intel Core i3-2310m con frequenza di clock a 2,10 GHz e 3 MB di cache L3. Dispone di 4 GB di memoria su moduli SODIMM DDR3 espandibile fino
GALEP-5 user guide. GALEP-5 Device Programmer. Alientech srl electronic performance 1
 1 Introduzione a GALEP-5 GALEP-5 è un programmatore universale di dispositivi elettronici, il più veloce e compatto della sua categoria, la cui lista di oltre 15000 dispositivi supportati lo rende un perfetto
1 Introduzione a GALEP-5 GALEP-5 è un programmatore universale di dispositivi elettronici, il più veloce e compatto della sua categoria, la cui lista di oltre 15000 dispositivi supportati lo rende un perfetto
Nucleo di Valutazione UNIVERSITÀ DEGLI STUDI DELL INSUBRIA
 Scheda di sintesi sulla rilevazione del Nucleo di Valutazione di Ateneo in qualità di OIV (Allegato 3 delibera ANAC n. 77/2013) Data di svolgimento della rilevazione La rilevazione è stata condotta dal
Scheda di sintesi sulla rilevazione del Nucleo di Valutazione di Ateneo in qualità di OIV (Allegato 3 delibera ANAC n. 77/2013) Data di svolgimento della rilevazione La rilevazione è stata condotta dal
 CAPITOLATO TECNICO LOTTO 1 Codice Nazionale Progetto:E-1-FESR-2011-1125 Obiettivo/Azione E.1 Realizzazione di ambienti dedicati per facilitare e promuovere la formazione permanente dei docenti attraverso
CAPITOLATO TECNICO LOTTO 1 Codice Nazionale Progetto:E-1-FESR-2011-1125 Obiettivo/Azione E.1 Realizzazione di ambienti dedicati per facilitare e promuovere la formazione permanente dei docenti attraverso
TL-W5MD1*1 TL-W 5MD2*1
 Sensori di prossimità induttivi piatti Superficie di rilevamento laterale e frontale. IP67. Modelli in c.c. a e a fili. Modelli disponibili Modelli in c.c. a fili Aspetto Distanza di rilevamento n schermato
Sensori di prossimità induttivi piatti Superficie di rilevamento laterale e frontale. IP67. Modelli in c.c. a e a fili. Modelli disponibili Modelli in c.c. a fili Aspetto Distanza di rilevamento n schermato
UDA. Argomento: IL SISTEMA NERVOSO. Classe: II ITIS. con indicazioni per i BES
 UDA con indicazioni per i BES Argomento: IL SISTEMA NERVOSO Classe: II ITIS Prerequisiti Biologia: L'organizzazione dei sistemi viventi La cellula e i tessuti Fisica: Trasformazione dell'energia Elettricità
UDA con indicazioni per i BES Argomento: IL SISTEMA NERVOSO Classe: II ITIS Prerequisiti Biologia: L'organizzazione dei sistemi viventi La cellula e i tessuti Fisica: Trasformazione dell'energia Elettricità
Pag. 25-4. Pag. 25-5. Pag. 25-4
 Pag. -4 ATL 600 Commutatore di rete con porta ottica e display LCD grafico. Alimentazione AC. 6 ingressi digitali programmabili. 7 uscite a relè programmabili. Pag. -4 ATL 610 Commutatore di rete con porta
Pag. -4 ATL 600 Commutatore di rete con porta ottica e display LCD grafico. Alimentazione AC. 6 ingressi digitali programmabili. 7 uscite a relè programmabili. Pag. -4 ATL 610 Commutatore di rete con porta
MACCHINE PER LA LAVORAZIONE DELLA LAMIERA
 MACCHINE PER LA LAVORAZIONE DELLA LAMIERA Cesoie 100% Made in Italy MACCHINE PER LA LAVORAZIONE DELLA LAMIERA VIMERCATI Vimercati è stata fondata nel 1973 come impresa a conduzione familiare, ed è ancora
MACCHINE PER LA LAVORAZIONE DELLA LAMIERA Cesoie 100% Made in Italy MACCHINE PER LA LAVORAZIONE DELLA LAMIERA VIMERCATI Vimercati è stata fondata nel 1973 come impresa a conduzione familiare, ed è ancora
CANCELLI SCORREVOLI. www.came.com
 CANCELLI SCORREVOLI 64 www.came.com 66 Guida alla scelta 68 Bx 70 Bk 72 By-3500T 74 DIMENSIONI QUADRI COMANDO 75 FUNZIONI ELETTRONICHE CANCELLI SCORREVOLI 65 Guida alla scelta Automazioni per cancelli
CANCELLI SCORREVOLI 64 www.came.com 66 Guida alla scelta 68 Bx 70 Bk 72 By-3500T 74 DIMENSIONI QUADRI COMANDO 75 FUNZIONI ELETTRONICHE CANCELLI SCORREVOLI 65 Guida alla scelta Automazioni per cancelli
Scaler Athena della nuova generazione
 ImagePRO II è una soluzione unica che associa scaler video, convertitore di scansione, commutatore e transcoder, in grado di convertire qualsiasi formato di segnale di ingresso in qualsiasi formato in
ImagePRO II è una soluzione unica che associa scaler video, convertitore di scansione, commutatore e transcoder, in grado di convertire qualsiasi formato di segnale di ingresso in qualsiasi formato in
Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") - Arduino è orientato all'applicazione, - Permette di provare, partendo dal piccolo e crescendo pezzo per pezzo (sviluppo modulare); - Lo sviluppo è aiutato da una enorme community online con esempi e
- Arduino è orientato all'applicazione, - Permette di provare, partendo dal piccolo e crescendo pezzo per pezzo (sviluppo modulare); - Lo sviluppo è aiutato da una enorme community online con esempi e
COMUNE DI PULA PROVINCIA DI CAGLIARI
 COMUNE DI PULA PROVINCIA DI CAGLIARI Settore Tecnico Ambientale - Urbanistica - Lavori Pubblici Proposta DTAULP-65-203 del 20/06/203 DETERMINAZIONE N. 550 DEL 03/07/203 OGGETTO: Fornitura e installazione
COMUNE DI PULA PROVINCIA DI CAGLIARI Settore Tecnico Ambientale - Urbanistica - Lavori Pubblici Proposta DTAULP-65-203 del 20/06/203 DETERMINAZIONE N. 550 DEL 03/07/203 OGGETTO: Fornitura e installazione
MACCHINA PELLETTIZZATRICE
 MACCHINA PELLETTIZZATRICE Con la Pellettizzatrice N-PLUS potrete risparmiare denaro, ottenendo un basso costo di produzione del pellet, in quanto le nostre macchine sono state sviluppate al fine di generare
MACCHINA PELLETTIZZATRICE Con la Pellettizzatrice N-PLUS potrete risparmiare denaro, ottenendo un basso costo di produzione del pellet, in quanto le nostre macchine sono state sviluppate al fine di generare
CONTROLLER MONO, RGB E COMPONENTI ELETTRONICI
 MONO, RGB E COMPONENTI ELETTRONICI FOTO CODICE DESCRIZIONE USCITA ALIMENTAZIONE DIMM DRIVER DRIVER AMPLIFICATORE DI SEGNALE PER STRISCE MONO, 1 CANALE, 12A, DIM.140x38x34mm. 24V 288W RGB DRIVER DRIVER
MONO, RGB E COMPONENTI ELETTRONICI FOTO CODICE DESCRIZIONE USCITA ALIMENTAZIONE DIMM DRIVER DRIVER AMPLIFICATORE DI SEGNALE PER STRISCE MONO, 1 CANALE, 12A, DIM.140x38x34mm. 24V 288W RGB DRIVER DRIVER
Footmill_intimax 17/03/16 13.44 Pagina 157 SISTEMI DI FRESATURA E STAMPA 3D INDUSTRIALI
 Footmill_intimax 17/03/16 13.44 Pagina 157 SISTEMI DI FRESATURA E STAMPA 3D INDUSTRIALI Una soluzione eccezionale 3D per la progettazione e produzione di plantari e forme personalizzate per calzature ortopediche
Footmill_intimax 17/03/16 13.44 Pagina 157 SISTEMI DI FRESATURA E STAMPA 3D INDUSTRIALI Una soluzione eccezionale 3D per la progettazione e produzione di plantari e forme personalizzate per calzature ortopediche
Telefono Multifunzione Evoluto Il Nuovo telefono standard dotato di innumerevoli funzioni
 Telefono Multifunzione Evoluto Il Nuovo telefono standard dotato di innumerevoli funzioni Il grande display LCD alfanumerico, i tasti funzione, i tasti memoria, il vivavoce potenziato, i Led di segnalazione
Telefono Multifunzione Evoluto Il Nuovo telefono standard dotato di innumerevoli funzioni Il grande display LCD alfanumerico, i tasti funzione, i tasti memoria, il vivavoce potenziato, i Led di segnalazione
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
I sistemi di ancoraggio costituiscono il core business dell azienda neozelandese Maxwell che da più di 4 decenni offre soluzioni eccellenti per
 I sistemi di ancoraggio costituiscono il core business dell azienda neozelandese Maxwell che da più di 4 decenni offre soluzioni eccellenti per imbarcazioni da diporto, da lavoro e militari con lunghezze
I sistemi di ancoraggio costituiscono il core business dell azienda neozelandese Maxwell che da più di 4 decenni offre soluzioni eccellenti per imbarcazioni da diporto, da lavoro e militari con lunghezze
Centralina di rilevazione incendio detect 3004 plus e accessori
 Centralina di rilevazione incendio detect 3004 e accessori Le centraline di rilevazione detect 3004 sono progettate per coprire una vasta gamma di applicazioni: dal piccolo sistema analogico indirizzato
Centralina di rilevazione incendio detect 3004 e accessori Le centraline di rilevazione detect 3004 sono progettate per coprire una vasta gamma di applicazioni: dal piccolo sistema analogico indirizzato
Corso destinato agli Incaricati per i Sistemi di Gestione Ambientale UNI EN ISO 14001:2004 PROGRAMMA DEL CORSO 24 ORE
 Corso destinato agli Incaricati per i Sistemi di Gestione Ambientale UNI EN ISO 14001:2004 PROGRAMMA DEL CORSO 24 ORE Responsabile del progetto formativo: Dott. Ing. Antonio Razionale Tutor: Dott. Ing.
Corso destinato agli Incaricati per i Sistemi di Gestione Ambientale UNI EN ISO 14001:2004 PROGRAMMA DEL CORSO 24 ORE Responsabile del progetto formativo: Dott. Ing. Antonio Razionale Tutor: Dott. Ing.
Memoria Secondaria o di Massa
 .. Pacman ha una velocità che dipende dal processore...quindi cambiando computer va più velocemente..sarà poi vero? Memoria Secondaria o di Massa dischi fissi (hard disk), floppy disk, nastri magnetici,
.. Pacman ha una velocità che dipende dal processore...quindi cambiando computer va più velocemente..sarà poi vero? Memoria Secondaria o di Massa dischi fissi (hard disk), floppy disk, nastri magnetici,