ROBOCUP JR ITALIA RIVA DEL GARDA
|
|
|
- Gianfranco Venturini
- 7 anni fa
- Visualizzazioni
Transcript
1 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto

2

3 autori MANETTI PARTECIPA ALLA GARA DI Istituto ISIT A. Manetti Classe: II A-B-C-D III AT-AA

4

5 CAP. 1 - DATI GENERALI La squadra Manetti è composta da due membri: Bargagna Leonardo, Santimaria Nicola frequentanti l istituto ISIT Alessandro Manetti di Grosseto (GR) nelle classi II A-B). Docente accompagnatore e responsabile: Antonio Turano.
.")
6

7 CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE All'inizio dell'anno scolastico il professore Daniele Dattrino, docente di fisica,ha proposto il progetto del corso di robotica alle classi seconde, che si sarebbe svolto nelle ore pomeridiane. Molti studenti delle classi seconde hanno partecipato al corso fin dall'inizio. Durante il progetto abbiamo incontrato molte difficoltà, superate anche grazie all'aiuto di alcuni studenti delle classi terze e alla guida dei professori. Il corso è stato interamente finanziato dalla scuola.

8

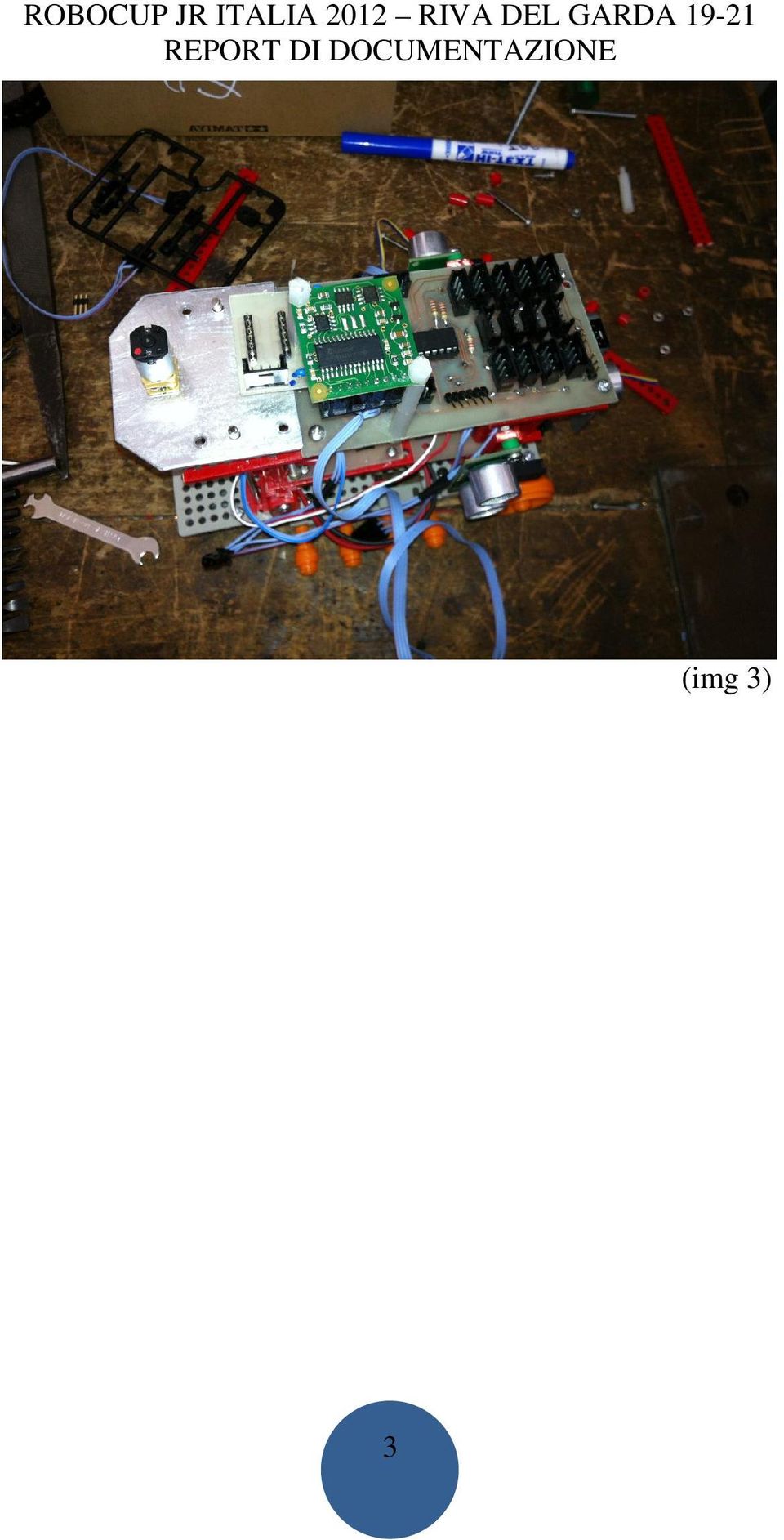
9 CAP. NOME E STRUTTURA DEL ROBOT Il nome PR.02EM, è stato scelto (sarcasticamente) verso la fine del corso. Il robot monta un PicKit 2 28pin-demo board (img.1a-1b)con un pic 16F886 sensori riflessivi infrarossi(img.), sonar SRF05(img.2), sensore di inclinazione BMA180(img.4)scheda motori auto costruita mentre la base e parte di un kit di montaggio della Tamya(img.5) (img.1a)
con un pic 16F886 sensori riflessivi infrarossi(img.), sonar SRF05(img.")
10 (img.1b) (img. 2) Tre sonar vengono usati per misurare le distanze laterali e frontali

11

12 (img.5) img. sensore ir : tre in linea vengono usati per seguire la linea nera

13 img.4 sensore di inclinazione: viene usato per riconoscere la presenza della rampa

14 CAP. 4 MECCANICA Per la struttura è stato usato un kit Tamiya,opportunamente modificato ed altre parti sono state realizzate da noi.

15 ROBOCUP JR ITALIA 2012 RIVA DEL GARDA 19-21

16 CAP. 5 UNITÀ DI CONTROLLO Per il nostro robot abbiamo usato una scheda di controllo PicKit 2 28pin-demo board (img.1a-1b)con un pic 16F886 ovvero un kit gia costruito a cui noi abbiamo collegato tutti i vari dispositivi montati. Noi per programmare la Demo bord usiamo pikit che viene programmato dal computer con il linguaggio C,il pikit poi invia le informazioni al 16F886. Inoltre usiamo un programma di diagnostica che ci permette di controllare il funzionamento di ogni singolo componente in tempo reale.

17

18 CAP. 6 SENSORI (Descrivere i sensori impiegati, il loro collegamento con l unità centrale, nel caso si tratti di sensori auto costruiti o sono stati significativamente modificati, allegare lo schema elettrico ed una breve descrizione. Se la natura meccanica del sensore è rilevante, aggiungere disegni cad o foto.) Per il nostro robot abbiamo usato tre tipi diversi di sensori: 1. Sonar SRF05 - Ultra-Sonic Ranger sensori usati per vedere ostacoli e girarci intorno nel robot ne sono presenti tre uno laterale sinistro uno laterale destro e uno centrale(img ). 2. sensori infrarossi ovvero sensori in grado di vedere le differenze di colore (bianco e nero )e grazie a essi il robot adeguatamente programmato riuscirà a vedere la linea presente nel circuito e seguirla.. Anche di questi sensori ne sono presenti tre uno laterale sinistro uno laterale destro e uno centrale montati nella parte sotto del robot a 5 mm di distanza dal suolo. Un sensore di posizione meglio detto come bussola, un sesnosre che misura la posizione in gradi (img 4) (img4)
e grazie a essi il robot adeguatamente programmato riuscirà a vedere la linea presente nel circuito e")
19 (img )
20

21 1 8 ROBOCUP JR ITALIA 2012 RIVA DEL GARDA CAP. 7 ATTUATORI Per il movimento dei cingoli ed il sollevamento della lattina sono usati tre motori a c.c.. I motori dei cingoli sono quelli del kit Tamiya alimentati con una scheda di interfaccia con L298n VDDBATTERIA BATTERIA BATTERIA C2 100nF C 100nF D1 DIODE D2 DIODE J2 FWDSX REVSX FWDDX REVDX PWMSX PWMDX U2 1A1 1A2 2A1 2A2 1EN 2EN VDD 9 BATTERIA 4 1E 2E GND 1Y1 1Y2 2Y1 2Y D DIODE 2 1 D4 DIODE MSX out J1 1 2 batteria BATTERIA L298D 15 BATTERIA BATTERIA J VDD D5 DIODE D6 DIODE J VDD J FWDDX REVDX PWMDX J FWDSX REVSX PWMSX D7 DIODE D8 DIODE MDX out MDX driv e MSX driv e Analogo circuito per pilotare il sollevamento e al chiusura della pinza.
22
23 CAP. 8 AMBIENTE DI SVILUPPO (Descrivere l ambiente di sviluppo impiegato ed il linguaggio di programmazione, precisandone la versione. Spiegare la motivazione della scelta.) La grande maggioranza delle nostre ore di lavoro sono state svolte in un laboratorio appositamente organizzato da noi, ovvero nei laboratori dell Istituto ISIT A. Manetti di Grosseto. Per la programmazione abbiamo l ambiente di sviluppo grafico sviluppato dai docenti della nostra scuola e basato su LabView. Questo ambiente permette di scrivere il programma sottoforma di un diagramma di flusso che viene poi tradotto in C, compilato e scaricato sul microcontrollore Per esempio in figura 6 è mostrato un semplice programma che accende i motori all indietro, in fig.7 il codice Labview che corrisponde all icona While True, in fig.8 la traduzione del diagramma di flusso in C. Noi non abbiamo realizzato le singole icone ma le abbiamo utilizzate per disegnare il nostro programma sottoforma di diagramma di flusso come viene fatto con molti ambienti di sviluppo commerciali (per esempio Robolab della LEGO).
24 5 fig. 6 indietro Substring Concatenated String while(true){ fig.7 while(true){ set_power_s(5,indietro); set_power_d(5,indietro); } fig.8
25 CAP. 9 IL PROGRAMMA SOFTWARE (Descrivere il software originale prodotto per implementare il robot (o i robot se più di uno). Per i linguaggi grafici si possono inserire le immagini di sezioni del programma.) avanti folle 0 80 folle avanti
26 Per programmare il robot si usa linguaggio C ma attraverso Labview lo si programma graficamente con delle icone contenenti stringe di comando che unite vengono unite tra loro attraverso un filo ogni icona può contenere degli if degli while oppure dei semplici comandi per far girare i motori. Per programmare il microcontrollore usiamo MpLab IDE fig 10 mentre per la stesura usiamo Labview. fig 11 Fig. 11
27 fig. 10
28 CAP. 10 SORGENTE DI ALIMENTAZIONE (Precisare la o le fonti di alimentazione del robot, indicandone tensione nominale e (se nota) carica nominale.) Per l'alimentazione abbiamo usato una batteria al Litio- Polimero da 11.1V e 1100 mah.
29 INDICE P.7 - CAP. 1 - DATI GENERALI P.9 - CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Report di documentazione delle squadre FerrariSusa_8 FerrariSusa_9 FerrariSusa_10 Istituto Enzo FERRARI di Susa (TO)
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Report di documentazione delle squadre FerrariSusa_8 FerrariSusa_9 FerrariSusa_10 Istituto Enzo FERRARI di Susa (TO)
ROBOCUP JR ITALIA 2015
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 19 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 19 Indice Premessa...3 1. Dati generali...5 2. Contesto e
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile
 aprile") Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra DA VINCI TN Liceo Scientifico L. Da Vinci Trento Dati generali La
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra DA VINCI TN Liceo Scientifico L. Da Vinci Trento Dati generali La
ROBOCUP JR ITALIA Riva del Garda aprile
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Report di documentazione delle squadre FerrariSusa_11 FerrariSusa_12 FerrariSusa_13 Istituto Enzo FERRARI di Susa
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Report di documentazione delle squadre FerrariSusa_11 FerrariSusa_12 FerrariSusa_13 Istituto Enzo FERRARI di Susa
ROBOCUP JUNIOR. CATANIA, Aprile SenigalliaRobot. A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni
 ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile
 aprile") Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE della squadra Other Robot ITIS G.B.Pininfarina Moncalieri (Torino) IL NOSTRO ISTITUTO
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE della squadra Other Robot ITIS G.B.Pininfarina Moncalieri (Torino) IL NOSTRO ISTITUTO
CATANIA 2011 DATI GENERALI DATI DI CONTESTO E MOTIVAZIONE
 CATANIA 2011 DATI GENERALI LA SQUADRA ANCLETO TEAM CHE PARTECIPA ALLA ROBOCUP JR. ITALIA CATANIA 2011 È COMPOSTA DA 5 STUDENTI: LEONARDO SPANÒ (CAPO SQUADRA) SAIBENE MATTEO TAMPU IULIAN LUPI LORENZO NICETTO
CATANIA 2011 DATI GENERALI LA SQUADRA ANCLETO TEAM CHE PARTECIPA ALLA ROBOCUP JR. ITALIA CATANIA 2011 È COMPOSTA DA 5 STUDENTI: LEONARDO SPANÒ (CAPO SQUADRA) SAIBENE MATTEO TAMPU IULIAN LUPI LORENZO NICETTO
Programmazione Modulare
 Programmazione Modulare Indirizzo: Elettronica ed Elettrotecnica Disciplina: Sistemi Automatici Classe: IV Ae Ore settimanali previste: 5 ( ore Teoria - ore Laboratorio) La disciplina, nell ambito della
Programmazione Modulare Indirizzo: Elettronica ed Elettrotecnica Disciplina: Sistemi Automatici Classe: IV Ae Ore settimanali previste: 5 ( ore Teoria - ore Laboratorio) La disciplina, nell ambito della
Robot Escape scatola di montaggio. Presentazione del produttore. Attrezzi necessari per la costruzione del robot Escape:
 105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA
 PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA") PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Della squadra: Bionics soccer Istituto: ITI Archimede Ct ROBOCUP JR ITALIA 2011 - Catania 14-16 aprile La Rete di scuole
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Della squadra: Bionics soccer Istituto: ITI Archimede Ct ROBOCUP JR ITALIA 2011 - Catania 14-16 aprile La Rete di scuole
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra Pigrecamezzi Istituto d'istruzione Superiore Statale "G.B. Vaccarini" Catania ROBOCUP JR ITALIA 2011 -
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra Pigrecamezzi Istituto d'istruzione Superiore Statale "G.B. Vaccarini" Catania ROBOCUP JR ITALIA 2011 -
ROBOT CUP SCHOOL Competizione organizzata dall Università degli Studi di Salerno Corso di laurea in Ingegneria Informatica
 ROBOT CUP SCHOOL 2016 Competizione organizzata dall Università degli Studi di Salerno Corso di laurea in Ingegneria Informatica MBOT, IL ROBOT COSE E UN ROBOT? Il termine Robot deriva dal Ceco Robota,
ROBOT CUP SCHOOL 2016 Competizione organizzata dall Università degli Studi di Salerno Corso di laurea in Ingegneria Informatica MBOT, IL ROBOT COSE E UN ROBOT? Il termine Robot deriva dal Ceco Robota,
Sistema di Elaborazione. Sistema di Controllo. Figura 1
 DIDAROBOT. Introduzione Un qualunque Robot contiene al suo interno tutti gli elementi che vengono normalmente studiati in un corso di studi in Elettronica e questo lo rende uno strumento didattico ideale.
DIDAROBOT. Introduzione Un qualunque Robot contiene al suo interno tutti gli elementi che vengono normalmente studiati in un corso di studi in Elettronica e questo lo rende uno strumento didattico ideale.
AiM Infotech. Sensore velocità auto. Versione 1.02
 AiM Infotech Sensore velocità auto Versione 1.02 Questo datasheet spiega come utilizzare il sensore velocità auto AiM. Il codice prodotto di questo sensore è: X05SNVS00 1 Introduzione Gli strumenti AiM
AiM Infotech Sensore velocità auto Versione 1.02 Questo datasheet spiega come utilizzare il sensore velocità auto AiM. Il codice prodotto di questo sensore è: X05SNVS00 1 Introduzione Gli strumenti AiM
Il sensore seguilinea
 PROGETTO ROBOTICA Il progetto di Robotica, iniziato quest anno, ha suscitato particolare interesse nella maggioranza degli alunni. Infatti studiare e applicare la robotica non è importante soltanto per
PROGETTO ROBOTICA Il progetto di Robotica, iniziato quest anno, ha suscitato particolare interesse nella maggioranza degli alunni. Infatti studiare e applicare la robotica non è importante soltanto per
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra LaneRossi 2.0 Istituto A. Rossi (VI) ROBOCUP JR ITALIA 2012 Riva
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra LaneRossi 2.0 Istituto A. Rossi (VI) ROBOCUP JR ITALIA 2012 Riva
Elo-1145-MSS-Zentraleinheit 471 M41 H31.book Page 1 Tuesday, September 6, :13 PM, Datum:
 471 M41 H31 Betriebsanleitung MSS-Zentraleinheit Operating instructions MSS central control unit Notice d'utilisation Unité centrale MSS Istruzioni d'impiego Centralina MSS Datum: 06.09.2005 , Datum: 06.09.2005
471 M41 H31 Betriebsanleitung MSS-Zentraleinheit Operating instructions MSS central control unit Notice d'utilisation Unité centrale MSS Istruzioni d'impiego Centralina MSS Datum: 06.09.2005 , Datum: 06.09.2005
Istituto di Istruzione Superiore. Maria Montessori Leonardo Da Vinci Via della Repubblica, Porretta Terme ALTO RENO TERME (BO)
") Istituto di Istruzione Superiore Maria Montessori Leonardo Da Vinci Via della Repubblica, 3-40046 Porretta Terme ALTO RENO TERME (BO) C.F. 80071330379 - Tel. 0534/521211 Fax 0534/23098 Comunicato Docenti
Istituto di Istruzione Superiore Maria Montessori Leonardo Da Vinci Via della Repubblica, 3-40046 Porretta Terme ALTO RENO TERME (BO) C.F. 80071330379 - Tel. 0534/521211 Fax 0534/23098 Comunicato Docenti
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra NONSO Istituto Vito Volterra La Rete di scuole per la Robocup Jr ITALIA è espressione dell
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra NONSO Istituto Vito Volterra La Rete di scuole per la Robocup Jr ITALIA è espressione dell
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5. PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
Università degli Studi di Cagliari
 Università degli Studi di Cagliari Laboratorio Eleonora d'arborea AUTOMAZIONE A FLUIDO Applicazione di controllori open-source a sistemi pneumatici con automazione a fluido Phd Student Eng. Mario Garau
Università degli Studi di Cagliari Laboratorio Eleonora d'arborea AUTOMAZIONE A FLUIDO Applicazione di controllori open-source a sistemi pneumatici con automazione a fluido Phd Student Eng. Mario Garau
Descrizione puntuale delle modalità di collocazione delle attrezzature
 ISTITUTO COMPRENSIVO DI CORINALDO con sedi staccate di Ostra Vetere e Castelleone di Suasa Via Dante, 45-60013 Corinaldo (AN) Tel. 071 67161 - Fax 0717978021 Mail anic834008@istruzione.it anic834008@pec.istruzione.it
ISTITUTO COMPRENSIVO DI CORINALDO con sedi staccate di Ostra Vetere e Castelleone di Suasa Via Dante, 45-60013 Corinaldo (AN) Tel. 071 67161 - Fax 0717978021 Mail anic834008@istruzione.it anic834008@pec.istruzione.it
Acquisizione dati a LABORATORIO - 4 (by Faso Diego)
") Acquisizione dati a LABORATORIO - 4 (by Faso Diego) Salve, sono il manuale che vi deve aiutare a risparmiare un po di tempo nell acquisizione dei dati userete Labview! Cos e? E un software della National
Acquisizione dati a LABORATORIO - 4 (by Faso Diego) Salve, sono il manuale che vi deve aiutare a risparmiare un po di tempo nell acquisizione dei dati userete Labview! Cos e? E un software della National
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche. Pietro Bonora Liceo Scientifico A.B.
 LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
KEYSTONE. OM2 - EPI 2 Attuatore elettrico a quarto di giro: batteria di emergenza al litio (9V) Manuale di istruzione.
 Manuale di istruzione.") KEYSTONE Indice 1 Modulo Opzionale 2: batteria di emergenza al litio (9V) 1 1.1 Funzione del modulo Batteria di emergenza al litio 1.2 Costruttore 2 Installazione 2 3 Schema elettrico della scheda OM2
KEYSTONE Indice 1 Modulo Opzionale 2: batteria di emergenza al litio (9V) 1 1.1 Funzione del modulo Batteria di emergenza al litio 1.2 Costruttore 2 Installazione 2 3 Schema elettrico della scheda OM2
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2015 Pag. 1di 1. PROGRAMMAZIONE ANNUALE A.S. 2015/ 2016 MECCANICA e MECCATRONICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2015 Pag. 1di 1 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2015/ 2016 MECCANICA e MECCATRONICA X MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2015 Pag. 1di 1 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2015/ 2016 MECCANICA e MECCATRONICA X MANUTENZIONE
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
ROBOTICA Syllabus Versione 1.0
 ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
ROBOT CALCIATORE VIPER III IIS Cobianchi ed Elettra Robotics Lab
 ROBOT CALCIATORE VIPER III IIS Cobianchi ed Elettra Robotics Lab DATI GENRALI Docente referente: Prof. Raimondo Sgrò Team di sviluppo: Filippo Marcodini (ERL) Christian Conti (ERL studente UniTo) Matteo
ROBOT CALCIATORE VIPER III IIS Cobianchi ed Elettra Robotics Lab DATI GENRALI Docente referente: Prof. Raimondo Sgrò Team di sviluppo: Filippo Marcodini (ERL) Christian Conti (ERL studente UniTo) Matteo
KSR5 ROBOT "SCARABEO" in KIT
 1. Introduzione e caratteristiche KSR5 ROBOT "SCARABEO" in KIT La ringraziamo per aver acquistato il KSR5! Si prega di leggere attentamente le informazioni contenute nel presente manuale prima di utilizzare
1. Introduzione e caratteristiche KSR5 ROBOT "SCARABEO" in KIT La ringraziamo per aver acquistato il KSR5! Si prega di leggere attentamente le informazioni contenute nel presente manuale prima di utilizzare
Internetworking V a nno
 Internetworking V anno Introduzione ad Arduino Introduzione La scheda Arduino nasce nel 2005 dall idea di alcuni giovani ricercatori guidati da Massimo Banzi. Il loro obiettivo era quello di creare una
Internetworking V anno Introduzione ad Arduino Introduzione La scheda Arduino nasce nel 2005 dall idea di alcuni giovani ricercatori guidati da Massimo Banzi. Il loro obiettivo era quello di creare una
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti!
 I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti! Pawel Jakub KOWALEWSKI IV a Elettronica & Telecomunicazioni 1 Robot 5 Minuti con kit Lego NXT MINDSTORMS
I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti! Pawel Jakub KOWALEWSKI IV a Elettronica & Telecomunicazioni 1 Robot 5 Minuti con kit Lego NXT MINDSTORMS
Cos è? Definizione ufficiale scritta dall inventore di Arduino, Massimo Banzi.
 Arduino Cos è? Definizione ufficiale scritta dall inventore di Arduino, Massimo Banzi. Arduino è una piattaforma open source di physical computing basata su una pemplice sheda input/output (I/O) e un ambiente
Arduino Cos è? Definizione ufficiale scritta dall inventore di Arduino, Massimo Banzi. Arduino è una piattaforma open source di physical computing basata su una pemplice sheda input/output (I/O) e un ambiente
Macchinina evita ostacoli Arduino
 Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Progetto di Eccellenza - OMAROBOT -
 Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
SCUOLA SECONDARIA STATALE DI I GRADO ITALO CALVINO PIACENZA
 SCUOLA SECONDARIA STATALE DI I GRADO ITALO CALVINO PIACENZA Sede Don Lorenzo Milani Via Boscarelli 23 - Piacenza - tel. 0523711562 fax 0523460918 Sede Angelo Genocchi Via Stradella 51 - Piacenza - tel.
SCUOLA SECONDARIA STATALE DI I GRADO ITALO CALVINO PIACENZA Sede Don Lorenzo Milani Via Boscarelli 23 - Piacenza - tel. 0523711562 fax 0523460918 Sede Angelo Genocchi Via Stradella 51 - Piacenza - tel.
ABB i-bus KNX Stazione meteorologica, 4 can., MDRC WS/S , 2CDG110191R0011
 Dati tecnici 2CDC504088D0901 ABB i-bus KNX Descrizione del prodotto L apparecchio viene utilizzato per rilevare i dati meteo. È possibile collegare all apparecchio un massimo di quattro sensori comunemente
Dati tecnici 2CDC504088D0901 ABB i-bus KNX Descrizione del prodotto L apparecchio viene utilizzato per rilevare i dati meteo. È possibile collegare all apparecchio un massimo di quattro sensori comunemente
Introduzione alla robotica
 LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
PROGETTUALITA DIDATTICA DIPARTIMENTO
 Anno Scolastico 2018/2019 Via dei Carpani 19/B 31033 Castelfranco V. ( TV ) Pag. 1 di 5 PROGETTUALITA DIDATTICA DIPARTIMENTO Disciplina SISTEMI E AUTOMAZIONE Classe 4^ Meccanica meccatronica DATI IN EVIDENZA
Anno Scolastico 2018/2019 Via dei Carpani 19/B 31033 Castelfranco V. ( TV ) Pag. 1 di 5 PROGETTUALITA DIDATTICA DIPARTIMENTO Disciplina SISTEMI E AUTOMAZIONE Classe 4^ Meccanica meccatronica DATI IN EVIDENZA
Piano di recupero del debito INFORMATICA PER L AUTOMAZIONE. Secondo Biennio
 1 ISTITUTO DI ISTRUZIONE SUPERIORE Liceo Scientifico Istituto Tecnico Industriale ALDO MORO Via Gallo Pecca n. 4/6 10086 RIVAROLO CANAVESE SEZIONE TECNICA A.S. 2015 2016 Piano di recupero del debito di
1 ISTITUTO DI ISTRUZIONE SUPERIORE Liceo Scientifico Istituto Tecnico Industriale ALDO MORO Via Gallo Pecca n. 4/6 10086 RIVAROLO CANAVESE SEZIONE TECNICA A.S. 2015 2016 Piano di recupero del debito di
Interfaccia RS 232 Tipo: x-101
 L interfaccia seriale viene utilizzata per collegare un PC all EIB e si monta su un dispositivo di accoppiamento bus da incasso. Può essere collocata in qualunque posizione del sistema. Si collega al PC
L interfaccia seriale viene utilizzata per collegare un PC all EIB e si monta su un dispositivo di accoppiamento bus da incasso. Può essere collocata in qualunque posizione del sistema. Si collega al PC
DISCIPLINA: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI CLASSE DI CONCORSO: A035 - C270
 A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo
 Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
MANUALE D'INSTALLAZIONE
 MANUALE D'INSTALLAZIONE Kit manometro digitale BHGP6A BHGP6A Kit manometro digitale Manuale d'installazione INDICE Pagina INSTALLAZIONE Accessori... Installazione... Procedura di lavoro... Controllo del
MANUALE D'INSTALLAZIONE Kit manometro digitale BHGP6A BHGP6A Kit manometro digitale Manuale d'installazione INDICE Pagina INSTALLAZIONE Accessori... Installazione... Procedura di lavoro... Controllo del
Tutto quello che abbiamo imparato all Istituto Tecnico Maserati. Scopri tutti i dettagli
 ROBOT @mico Tutto quello che abbiamo imparato all Istituto Tecnico Maserati Scopri tutti i dettagli ROBBIE SI PRESENTA!!!!! Ciao io sono R.O.B.B.I.E. Ovvero Robot Originale, Bello, Bravo, Intelligente
ROBOT @mico Tutto quello che abbiamo imparato all Istituto Tecnico Maserati Scopri tutti i dettagli ROBBIE SI PRESENTA!!!!! Ciao io sono R.O.B.B.I.E. Ovvero Robot Originale, Bello, Bravo, Intelligente
Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007
 SAVE Veronafiere 23-25 Ottobre 2007") Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007 Argomenti trattati Cosa è un P.L.C.? Logica cablata (Relé) Logica con il P.L.C. Vantaggi
Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007 Argomenti trattati Cosa è un P.L.C.? Logica cablata (Relé) Logica con il P.L.C. Vantaggi
MANUALE D USO serie MPNC020 ingressi / uscite digitali
 MANUALE D USO serie MPNC020 ingressi / uscite digitali M7015_06 07/17 INDICE INDICE... 3 1.0 Premessa... 2 1.1 Qualificazione del personale... 2 1.2 Simboli... 2 1.3 Nomenclatura... 2 1.4 Sicurezza...
MANUALE D USO serie MPNC020 ingressi / uscite digitali M7015_06 07/17 INDICE INDICE... 3 1.0 Premessa... 2 1.1 Qualificazione del personale... 2 1.2 Simboli... 2 1.3 Nomenclatura... 2 1.4 Sicurezza...
La piattaforma per la robotica educativa VEX IQ è pensata per gli studenti a partire dalla scuola primaria. Si adatta sia a studenti alle prime armi
 La piattaforma per la robotica educativa VEX IQ è pensata per gli studenti a partire dalla scuola primaria. Si adatta sia a studenti alle prime armi che sperimentano un linguaggio di programmazione a blocchi
La piattaforma per la robotica educativa VEX IQ è pensata per gli studenti a partire dalla scuola primaria. Si adatta sia a studenti alle prime armi che sperimentano un linguaggio di programmazione a blocchi
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi)
") IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
consegnare mediamente 8 esercizi a settimana per 7 settimane su 10
 T.D.P. - I compiti sono da consegnare settimanalmente a scuola (a mano o lettera o e-mail) all attenzione di Prof. Bolley e Prof. Di Ninno consegnare mediamente 8 esercizi a settimana per 7 settimane su
T.D.P. - I compiti sono da consegnare settimanalmente a scuola (a mano o lettera o e-mail) all attenzione di Prof. Bolley e Prof. Di Ninno consegnare mediamente 8 esercizi a settimana per 7 settimane su
ISTITUTO COMPRENSIVO LUCCA 2
 ISTITUTO COMPRENSIVO LUCCA 2 CURRICOLO TECNOLOGIA - SCUOLA SECONDARIA DI I GRADO L. DA VINCI CURRICOLO TECNOLOGIA - CLASSI PRIME ANNO SCOLASTICO 2015-2016 COMPETENZE ABILITA CONOSCENZE TECNOLOGIA ED ANALISI
ISTITUTO COMPRENSIVO LUCCA 2 CURRICOLO TECNOLOGIA - SCUOLA SECONDARIA DI I GRADO L. DA VINCI CURRICOLO TECNOLOGIA - CLASSI PRIME ANNO SCOLASTICO 2015-2016 COMPETENZE ABILITA CONOSCENZE TECNOLOGIA ED ANALISI
Elettrovalvole proporzionali ERP
 Elettrovalvole proporzionali ERP 2.01.05 Indice del contenuto: Descrizione: Pagina 3 Peculiarità & caratteristiche tecniche: Pagina 4 Curve di regolazione: Pagina 5 Dimensioni di installazione (valvole
Elettrovalvole proporzionali ERP 2.01.05 Indice del contenuto: Descrizione: Pagina 3 Peculiarità & caratteristiche tecniche: Pagina 4 Curve di regolazione: Pagina 5 Dimensioni di installazione (valvole
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile REPORT DI DOCUMENTAZIONE Della squadra _T4AT_ Istituto _ITIS A. ROSSI_ Vicenza La Rete di scuole per la Robocup Jr ITALIA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile REPORT DI DOCUMENTAZIONE Della squadra _T4AT_ Istituto _ITIS A. ROSSI_ Vicenza La Rete di scuole per la Robocup Jr ITALIA
BREADBOARD. saldare tutti i collegamenti, rendendo: estremamente laboriosa la modifica dei cablaggi, spesso non riutilizzabile la basetta.
 Breadboard BREADBOARD La costruzione di circuiti elettronici passa spesso per la costruzione di prototipi che possono richiedere più tentativi di cablaggio e messa a punto. Se il circuito prototipo fosse
Breadboard BREADBOARD La costruzione di circuiti elettronici passa spesso per la costruzione di prototipi che possono richiedere più tentativi di cablaggio e messa a punto. Se il circuito prototipo fosse
Panoramica del progetto DMBoard ICS
 Panoramica del progetto DMBoard ICS Sommario 1. HARDWARE... 1 1.1 Cos è DMBoard ICS... 2 1.2 DMBoard ICS come strumento didattico... 2 2. SOFTWARE... 2 2.1 Cos è DMDesign... 2 2.2 Cos è DMstate... 3 2.3
Panoramica del progetto DMBoard ICS Sommario 1. HARDWARE... 1 1.1 Cos è DMBoard ICS... 2 1.2 DMBoard ICS come strumento didattico... 2 2. SOFTWARE... 2 2.1 Cos è DMDesign... 2 2.2 Cos è DMstate... 3 2.3
Descrizione caratteristiche cilindri elettrici serie ECC+
 Descrizione caratteristiche cilindri elettrici serie ECC+ Tipologie e potenzialità nuovo cilindro elettrico in cc 12/24V della famiglia EASY tipo ECC + Caratteristiche generali del sistema: Alimentazione
Descrizione caratteristiche cilindri elettrici serie ECC+ Tipologie e potenzialità nuovo cilindro elettrico in cc 12/24V della famiglia EASY tipo ECC + Caratteristiche generali del sistema: Alimentazione
INNOVAZIONE DIGITALE: CODING, ROBOTICA, MAKING
 . la scuola digitale non è un altra scuola. È più concretamente la sfida dell innovazione della scuola. (PNSD pag 9) AZIONI DI RIFERIMENTO Azione #17 Portare il pensiero logico-computazionale a tutta la
. la scuola digitale non è un altra scuola. È più concretamente la sfida dell innovazione della scuola. (PNSD pag 9) AZIONI DI RIFERIMENTO Azione #17 Portare il pensiero logico-computazionale a tutta la
Scheda prodotto. Banco di flussaggio. Descrizione:
 Descrizione: Scheda prodotto Banco di flussaggio Il banco prova in oggetto è destinato alle prove di flussaggio d aria attraverso le valvole motore, in modalità aspirazione e scarico, di motori endotermici.
Descrizione: Scheda prodotto Banco di flussaggio Il banco prova in oggetto è destinato alle prove di flussaggio d aria attraverso le valvole motore, in modalità aspirazione e scarico, di motori endotermici.
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Squadra: TEXAS BOT Istituto: ITIS A.ROSSI La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Squadra: TEXAS BOT Istituto: ITIS A.ROSSI La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica
Gulliver: A self balancing robot
 Gulliver: A self balancing robot Ciao a tutti, io mi chiamo Davide e sono uno studente della università di Salerno, oggi voglio presentarvi un progetto già visto ma basato interamente su un microcontrollore
Gulliver: A self balancing robot Ciao a tutti, io mi chiamo Davide e sono uno studente della università di Salerno, oggi voglio presentarvi un progetto già visto ma basato interamente su un microcontrollore
Ministero dell Istruzione, dell Università e della Ricerca Ufficio Scolastico Regionale per la Sardegna
 Ministero dell Istruzione, dell Università e della Ricerca Ufficio Scolastico Regionale per la Sardegna ISTITUTO DI ISTRUZIONE SUPERIORE BUCCARI MARCONI Indirizzi: Trasporti Marittimi / Apparati ed Impianti
Ministero dell Istruzione, dell Università e della Ricerca Ufficio Scolastico Regionale per la Sardegna ISTITUTO DI ISTRUZIONE SUPERIORE BUCCARI MARCONI Indirizzi: Trasporti Marittimi / Apparati ed Impianti
Per vedere tutti i tutorial:
 www.creativecommons.org Arduino Tutorial #16 - Mocho - Robot pulitore. Materiale utilizzato Arduino UNO - Motor Shield (2A Motor Shield) - motoriduttori - 2 ruote - sensore Sharp di distanza - struttura
www.creativecommons.org Arduino Tutorial #16 - Mocho - Robot pulitore. Materiale utilizzato Arduino UNO - Motor Shield (2A Motor Shield) - motoriduttori - 2 ruote - sensore Sharp di distanza - struttura
Opzione manutentore impianti elettrici e automazione
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
TECNOLOGICI ED ESERCITAZIONI CLASSE 2ME
 PROGRAMMAZIONE DIDATTICA Dipartimento Elettrico Elettronico LABORATORI TECNOLOGICI ED ESERCITAZIONI CLASSE 2ME MODULO 1 : Illustrazione dei tipi di CAVI Sviluppo cronologico : Settembre / Ottobre Acquisire
PROGRAMMAZIONE DIDATTICA Dipartimento Elettrico Elettronico LABORATORI TECNOLOGICI ED ESERCITAZIONI CLASSE 2ME MODULO 1 : Illustrazione dei tipi di CAVI Sviluppo cronologico : Settembre / Ottobre Acquisire
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
ABB i-bus KNX Interfaccia contatore, MDRC ZS/S 1.1
 Dati tecnici ABB i-bus KNX Descrizione del prodotto L interfaccia contatore ZS/S consente la lettura a distanza dei dati contatore e dei valori contatore per contatori di energia ABB dei tipi Serie A,
Dati tecnici ABB i-bus KNX Descrizione del prodotto L interfaccia contatore ZS/S consente la lettura a distanza dei dati contatore e dei valori contatore per contatori di energia ABB dei tipi Serie A,
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
PECUP ELETTRONICA ED ELETTROTECNICA ELETTROTECNICA SISTEMI AUTOMATICI TERZO COMPETENZE ABILITA' CONOSCENZE
 ISTITUTO TECNICO INDUSTRIALE STATALE Enrico Fermi Via Capitano di Castri - 72021 FRANCAVILLA FONTANA (BR) Specializzazioni: ELETTRONICA E TELECOM. - ELETTROTECNICA E AUTOM. INFORMATICA - MECCANICA Tel.
ISTITUTO TECNICO INDUSTRIALE STATALE Enrico Fermi Via Capitano di Castri - 72021 FRANCAVILLA FONTANA (BR) Specializzazioni: ELETTRONICA E TELECOM. - ELETTROTECNICA E AUTOM. INFORMATICA - MECCANICA Tel.
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
Guida all assemblaggio e al testing del modulo di retroazione S2 V2
 Guida all assemblaggio e al testing del modulo di retroazione S2 V2 Versione guida 1.0 Il kit contiene sia il circuito stampato che tutti i componenti necessari per assemblare il modulo. L assemblaggio
Guida all assemblaggio e al testing del modulo di retroazione S2 V2 Versione guida 1.0 Il kit contiene sia il circuito stampato che tutti i componenti necessari per assemblare il modulo. L assemblaggio
MANUALE D USO DELLA SCHEDA DI CONTROLLO APM 2020
 MANUALE D USO DELLA SCHEDA DI CONTROLLO APM 2020 La scheda APM 2020 è stata progettata in modo da velocizzare l installazione e l operatività dell intero sistema e da migliorarne ancora di più l affidabilità.
MANUALE D USO DELLA SCHEDA DI CONTROLLO APM 2020 La scheda APM 2020 è stata progettata in modo da velocizzare l installazione e l operatività dell intero sistema e da migliorarne ancora di più l affidabilità.
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
LA PROGRAMMAZIONE DEL PLC /1
 LA PROGRAMMAZIONE DEL PLC /1 Per programmare correttamente un PLC è necessario... determinare ciò che il sistema deve eseguire ed in quale ordine; determinare il numero e il tipo di I/O (ingressi/uscite)
LA PROGRAMMAZIONE DEL PLC /1 Per programmare correttamente un PLC è necessario... determinare ciò che il sistema deve eseguire ed in quale ordine; determinare il numero e il tipo di I/O (ingressi/uscite)
I robot si sono evoluti...
 I robot si sono evoluti... 308 Ulteriori informazioni, datasheet e acquisti on-line: www.futurashop.it Robotic a e nuov e te c n o l o g i e Robot Rovio 499 00 di sistema di Navigazione TrueTrack che consente
I robot si sono evoluti... 308 Ulteriori informazioni, datasheet e acquisti on-line: www.futurashop.it Robotic a e nuov e te c n o l o g i e Robot Rovio 499 00 di sistema di Navigazione TrueTrack che consente
KNX Hotel Sistema di regolazione alberghiera Guida all installazione (per applicazioni con camere dotate di regolazione aggiuntiva di temperatura)
") KNX Hotel Guida all installazione KNX Hotel Sistema di regolazione alberghiera Guida all installazione (per applicazioni con camere dotate di regolazione aggiuntiva di temperatura) Building Technologies
KNX Hotel Guida all installazione KNX Hotel Sistema di regolazione alberghiera Guida all installazione (per applicazioni con camere dotate di regolazione aggiuntiva di temperatura) Building Technologies
MANUALE di ISTRUZIONI
 MANUALE di ISTRUZIONI IT 10-11 Indice 1. Introduzione 2 1.1. Istruzioni per la sicurezza. 2 1.2. Verifica imballo 2 2. Descrizione. 2 2.1. Caratteristiche generali.. 2 2.2. Abbinamento a strumenti FlowX3....
MANUALE di ISTRUZIONI IT 10-11 Indice 1. Introduzione 2 1.1. Istruzioni per la sicurezza. 2 1.2. Verifica imballo 2 2. Descrizione. 2 2.1. Caratteristiche generali.. 2 2.2. Abbinamento a strumenti FlowX3....
REALIZZAZIONE DI UN CIRCUITO PER LA GESTIONE, DA REMOTO, DELLO SCATTO DELLA CAMERA REFLEX NIKON D800E
 Università degli studi di Napoli Federico II Dipartimento di Agraria REALIZZAZIONE DI UN CIRCUITO PER LA GESTIONE, DA REMOTO, DELLO SCATTO DELLA CAMERA REFLEX NIKON D800E Alessandra Capolupo Obiettivo
Università degli studi di Napoli Federico II Dipartimento di Agraria REALIZZAZIONE DI UN CIRCUITO PER LA GESTIONE, DA REMOTO, DELLO SCATTO DELLA CAMERA REFLEX NIKON D800E Alessandra Capolupo Obiettivo
Control System.
 Control System HANGAR www.hangar-lab.com INDICE Introduzione a Systema 3 Sensori compatibili con Systema 4 Systema nell illuminotecnica 5 Una tecnologia versatile 6 Componenti 8 Configurazione con sensore
Control System HANGAR www.hangar-lab.com INDICE Introduzione a Systema 3 Sensori compatibili con Systema 4 Systema nell illuminotecnica 5 Una tecnologia versatile 6 Componenti 8 Configurazione con sensore
I sensori del robot 1
 I sensori del robot 1 Il sensore di contatto Il sensore di contatto è in grado di rilevare quando il proprio pulsante rosso viene premuto e rilasciato. Può essere utilizzato per esempio per programmare
I sensori del robot 1 Il sensore di contatto Il sensore di contatto è in grado di rilevare quando il proprio pulsante rosso viene premuto e rilasciato. Può essere utilizzato per esempio per programmare
PROGRAMMAZIONE E PIANO DI LAVORO
 Declinazione dei risultati di apprendimento in competenze, abilità e conoscenze (art. 5 DPR 15/03/2010, n. 88) Mod 1-DOCENTE-PIANO DI LAVORO PROGRAMMAZIONE INIZIALE ISTITUTO TECNICO INDUSTRIALE STATALE
Declinazione dei risultati di apprendimento in competenze, abilità e conoscenze (art. 5 DPR 15/03/2010, n. 88) Mod 1-DOCENTE-PIANO DI LAVORO PROGRAMMAZIONE INIZIALE ISTITUTO TECNICO INDUSTRIALE STATALE
MANUALE D USO Serie MPNC ingressi analogici
 MANUALE D USO Serie MPNC030 01 4 ingressi analogici Via Enrico Fermi, 57/59-10091 ALPIGNANO (TO) Telefono: +39 (0)11 9664616 Fax: +39 (0)11 9664610 E-mail: srlmect@mect.it - C.F. e P.I. 04056380019 M7016_06
MANUALE D USO Serie MPNC030 01 4 ingressi analogici Via Enrico Fermi, 57/59-10091 ALPIGNANO (TO) Telefono: +39 (0)11 9664616 Fax: +39 (0)11 9664610 E-mail: srlmect@mect.it - C.F. e P.I. 04056380019 M7016_06
Robolaboratorio. Laboratorio Di Robotica: Proposta Per Alcune Attività Didattiche. Cristiana Bianchi
 Robolaboratorio Laboratorio Di Robotica: Proposta Per Alcune Attività Didattiche Cristiana Bianchi Descrizione dell unità di lavoro e apprendimento L unità di lavoro viene programmata e realizzata con
Robolaboratorio Laboratorio Di Robotica: Proposta Per Alcune Attività Didattiche Cristiana Bianchi Descrizione dell unità di lavoro e apprendimento L unità di lavoro viene programmata e realizzata con
Rete di scuole per la
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Linguaggi di Programmazione
 Linguaggi di Programmazione Linguaggi di Programmazione Programmazione. Insieme delle attività e tecniche svolte per creare un programma (codice sorgente) da far eseguire ad un computer. Che lingua comprende
Linguaggi di Programmazione Linguaggi di Programmazione Programmazione. Insieme delle attività e tecniche svolte per creare un programma (codice sorgente) da far eseguire ad un computer. Che lingua comprende
Sistema di prova monoassiale a fatica
 Sistema di prova monoassiale a fatica L impianto è composto dai seguenti gruppi principali: Macchina idraulica per test a fatica La funzione è di testare provini con carichi predefiniti in funzione delle
Sistema di prova monoassiale a fatica L impianto è composto dai seguenti gruppi principali: Macchina idraulica per test a fatica La funzione è di testare provini con carichi predefiniti in funzione delle
Zeus Din 3 Standard Kit
 Copertina DataSheet Zeus Din 3 Standard Kit Zeus Din 3 Standard Kit Logger di energia trifase multifunzione completo di sensori Codice prodotto: TP-021-100 Caratteristiche Generali Il Kit Zeus Din 3 Standard
Copertina DataSheet Zeus Din 3 Standard Kit Zeus Din 3 Standard Kit Logger di energia trifase multifunzione completo di sensori Codice prodotto: TP-021-100 Caratteristiche Generali Il Kit Zeus Din 3 Standard
DISPOSITIVO DI SICUREZZA ANTISCHIACCIAMENTO PER MACCHINE AGRICOLE
 DISPOSITIVO DI SICUREZZA ANTISCHIACCIAMENTO PER MACCHINE AGRICOLE Il dispositivo rende automatica l' operazione di inserimento del roll-bar sulle macchine agricole. Tale operazione in precedenza era realizzata
DISPOSITIVO DI SICUREZZA ANTISCHIACCIAMENTO PER MACCHINE AGRICOLE Il dispositivo rende automatica l' operazione di inserimento del roll-bar sulle macchine agricole. Tale operazione in precedenza era realizzata
AiM Manuale Utente. Kit sensori temperatura pneumatici per Kart. Versione 1.05
 AiM Manuale Utente Kit sensori temperatura pneumatici per Kart Versione 1.05 1 Introduzione Questo manuale utente mostra come installare il kit sensori temperatura gomme per kart e visualizzare i dati
AiM Manuale Utente Kit sensori temperatura pneumatici per Kart Versione 1.05 1 Introduzione Questo manuale utente mostra come installare il kit sensori temperatura gomme per kart e visualizzare i dati
CARICA PILE NI-CAD RIFERIMENTI
 IZ5AGZ op. ALESSANDRO FREZZOTTI CARICA PILE NI-CAD RIFERIMENTI Genere DATA Generalità Note Distribuzione RADIO 1998 BOX X CARICA PILE DESCRIZIONE DI PROGETTO DEL 1998 AF, NET GENERALITA Facendo un riordino
IZ5AGZ op. ALESSANDRO FREZZOTTI CARICA PILE NI-CAD RIFERIMENTI Genere DATA Generalità Note Distribuzione RADIO 1998 BOX X CARICA PILE DESCRIZIONE DI PROGETTO DEL 1998 AF, NET GENERALITA Facendo un riordino
Seguendo alla lettera le istruzioni del presente manuale l automazione funzionerà perfettamente senza dare problemi.
 SPAZIO INNOVAZIONI Srl Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza
SPAZIO INNOVAZIONI Srl Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza
Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola
 Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola Anatomia del nostro robot Daniele Grosso (1) 1. Dipartimento
Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola Anatomia del nostro robot Daniele Grosso (1) 1. Dipartimento
X700. Manuale di installazione. sistema GPS/GPRS per il monitoraggio delle flotte. Valido per il modello: X700
 Manuale di installazione Valido per il modello: numero / data documento:.3.1.3 / 2014-02-28.3.1 1. Componenti di sistema Fig. 1 - Contenuto kit di installazione (variante full optional) Componenti dotazione
Manuale di installazione Valido per il modello: numero / data documento:.3.1.3 / 2014-02-28.3.1 1. Componenti di sistema Fig. 1 - Contenuto kit di installazione (variante full optional) Componenti dotazione
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE della squadra GruzanteSoccer ITIS C. Zuccante - Mestre La Rete di scuole per la
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE della squadra GruzanteSoccer ITIS C. Zuccante - Mestre La Rete di scuole per la
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE della squadra GruzanteRescueB ITIS C. Zuccante - Mestre La Rete di scuole per la
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE della squadra GruzanteRescueB ITIS C. Zuccante - Mestre La Rete di scuole per la
Centro Assistenza Nazionale Tel
 SETTORE AUTOMAZIONI Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza Nazionale
SETTORE AUTOMAZIONI Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza Nazionale