La 2006/42/CE, RESS e la EN ISO /2
|
|
|
- Rita Fabiani
- 6 anni fa
- Visualizzazioni
Transcript


1 Safety, Detection, Control La 2006/42/CE, RESS e la EN ISO /2 1 Il RES e la ISO /11/2016 1
2 ALLEGATO I La Direttiva macchine 2006/42/CE e l'allegato 1 Requisiti essenziali di sicurezza e di tutela della salute relativi alla progettazione e alla costruzione delle macchine PRINCIPI GENERALI 1. Il fabbricante di una macchina, o il suo mandatario, deve garantire che sia effettuata una valutazione dei rischi per stabilire i requisiti di sicurezza e di tutela della salute che concernono la macchina. La macchina deve inoltre essere progettata e costruita tenendo conto dei risultati della valutazione dei rischi. Con il processo iterativo della valutazione dei rischi e della riduzione dei rischi di cui sopra, il fabbricante o il suo mandatario: stabilisce i limiti della macchina, il che comprende l'uso previsto e l'uso scorretto ragionevolmente prevedibile, individua i pericoli cui può dare origine la macchina e le situazioni pericolose che ne derivano, stima i rischi, tenendo conto della gravità dell'eventuale lesione o danno alla salute e della probabilità che si verifichi, valuta i rischi al fine di stabilire se sia richiesta una riduzione del rischio conformemente all'obiettivo della presente direttiva, elimina i pericoli o riduce i rischi che ne derivano, applicando le misure di protezione nell'ordine indicato nel punto 1.1.2, lettera b). 2
3 La Direttiva macchine 2006/42/CE e l'allegato 1 PRINCIPI GENERALI (segue) 2. Gli obblighi previsti dai requisiti essenziali di sicurezza e di tutela della salute si applicano soltanto se esiste il pericolo corrispondente per la macchina in questione, allorché viene utilizzata nelle condizioni previste dal fabbricante, o dal suo mandatario, o nelle condizioni anormali prevedibili. Il principio di integrazione della sicurezza di cui al punto e gli obblighi relativi alla marcatura e alle istruzioni di cui ai punti e si applicano comunque. 3. I requisiti essenziali di sicurezza e di tutela della salute elencati nel presente allegato sono inderogabili. Tuttavia, tenuto conto dello stato della tecnica, gli obiettivi da essi prefissi possono non essere raggiunti. In tal caso la macchina deve, per quanto possibile, essere progettata e costruita per tendere verso questi obiettivi. 4. Il presente allegato si articola in varie parti. La prima ha una portata generale ed è applicabile a tutti i tipi di macchine. Le altre parti si riferiscono a taluni tipi di pericoli più specifici. Tuttavia è indispensabile esaminare il presente allegato in tutte le sue parti, al fine di essere certi di soddisfare tutti i requisiti essenziali pertinenti. Nel progettare la macchina, conformemente al punto 1 dei presenti principi generali, si tiene conto dei requisiti esposti nella parte generale e di quelli elencati in una o più delle altre parti in funzione dei risultati della valutazione dei rischi. 3
4 La Direttiva macchine 2006/42/CE e l'allegato Principi d'integrazione della sicurezza a) Per progettazione e costruzione, le macchine devono essere atte a funzionare, ad essere azionate, ad essere regolate e a subire la manutenzione senza che tali operazioni espongano a rischi le persone, se effettuate nelle condizioni previste tenendo anche conto dell'uso scorretto ragionevolmente prevedibile. Le misure adottate devono avere lo scopo di eliminare ogni rischio durante l'esistenza prevedibile della macchina, comprese le fasi di trasporto, montaggio, smontaggio, smantellamento (messa fuori servizio) e rottamazione. b) Per la scelta delle soluzioni più opportune il fabbricante o il suo mandatario deve applicare i seguenti principi, nell'ordine indicato: eliminare o ridurre i rischi nella misura del possibile (integrazione della sicurezza nella progettazione e nella costruzione della macchina), adottare le misure di protezione necessarie nei confronti dei rischi che non possono essere eliminati, informare gli utilizzatori dei rischi residui dovuti all'incompleta efficacia delle misure di protezione adottate, indicare se è richiesta una formazione particolare e segnalare se è necessario prevedere un dispositivo di protezione individuale. 4
5 La Direttiva macchine 2006/42/CE e l'allegato 1 c) In sede di progettazione e di costruzione della macchina, nonché all'atto della redazione delle istruzioni, il fabbricante o il suo mandatario, deve prendere in considerazione non solo l'uso previsto della macchina, ma anche l'uso scorretto ragionevolmente prevedibile. La macchina deve essere progettata e costruita in modo da evitare che sia utilizzata in modo anormale, se ciò può comportare un rischio. Negli altri casi le istruzioni devono richiamare l'attenzione dell'utilizzatore sulle controindicazioni nell'uso della macchina che potrebbero, in base all'esperienza, presentarsi. d) La macchina deve essere progettata e costruita tenendo conto delle limitazioni imposte all'operatore dall'uso necessario o prevedibile delle attrezzature di protezione individuale. e) La macchina deve essere fornita completa di tutte le attrezzature e gli accessori speciali essenziali per poterla regolare, eseguirne la manutenzione e utilizzarla in condizioni di sicurezza. 5
6 La Direttiva macchine 2006/42/CE e l'allegato Sicurezza ed affidabilità dei sistemi di comando I sistemi di comando devono essere progettati e costruiti in modo da evitare l'insorgere di situazioni pericolose. In ogni caso essi devono essere progettati e costruiti in modo tale che: resistano alle previste sollecitazioni di servizio e agli influssi esterni, un'avaria nell'hardware o nel software del sistema di comando non crei situazioni pericolose, errori della logica del sistema di comando non creino situazioni pericolose, errori umani ragionevolmente prevedibili nelle manovre non creino situazioni pericolose. 6
7 La Direttiva macchine 2006/42/CE e l'allegato 1 Particolare attenzione richiede quanto segue: la macchina non deve avviarsi in modo inatteso, i parametri della macchina non devono cambiare in modo incontrollato, quando tale cambiamento può portare a situazioni pericolose, non deve essere impedito l'arresto della macchina, se l'ordine di arresto è già stato dato, nessun elemento mobile della macchina o pezzo trattenuto dalla macchina deve cadere o essere espulso, l'arresto manuale o automatico degli elementi mobili di qualsiasi tipo non deve essere impedito, i dispositivi di protezione devono rimanere pienamente efficaci o dare un comando di arresto, le parti del sistema di controllo legate alla sicurezza si devono applicare in modo coerente all'interezza di un insieme di macchine e/o di quasi macchine. In caso di comando senza cavo deve essere attivato un arresto automatico quando non si ricevono i segnali di comando corretti, anche quando si interrompe la comunicazione. 7
8 Le Norme ISO e UNI EN ISO :2008 Sicurezza del macchinario - Parti dei sistemi di comando legate alla sicurezza - Parte 1: Principi generali per la progettazione Sommario : La presente norma è la versione ufficiale della norma europea EN ISO (edizione giugno 2008) e tiene conto della errata corrige del marzo 2009 (AC:2009). La norma specifica i requisiti di sicurezza e le linee guida sui principi di progettazione e integrazione di parti dei sistemi di comando legate alla sicurezza, inclusa la progettazione del software. UNI EN ISO :2013 Sicurezza del macchinario - Parti dei sistemi di comando legate alla sicurezza - Parte 2: Validazione Sommario : La presente norma è la versione ufficiale in lingua inglese della norma europea EN ISO (edizione ottobre 2012). La norma specifica le procedure e le condizioni da seguire per la validazione mediante analisi e prove delle funzioni di sicurezza specificate, la categoria ottenuta e il livello di prestazione ottenuto dalle parti di un sistema di comando legate alla sicurezza progettate in conformità alla UNI EN ISO
9 La norma ed il RESS
10 Termini e definizione SRP/CS (Safety Related Parts of Command System) Sistemi di comando legati alla sicurezza Parte di un sistema di comando che risponde a segnali di ingresso legati alla sicurezza e genera dei corrispondenti segnali di uscita legati alla sicurezza. Fault - Avaria Stato di un entità caratterizzato dall'incapacità di eseguire una funzione richiesta, esclusa l'inabilità durante la manutenzione preventiva o durante altre azioni programmate o dovute alla mancanza di mezzi esterni Una avaria è spesso il risultato di un guasto, ma, può esistere anche senza il verificarsi dello stesso Failure - Guasto Cessazione dell'attitudine di un entità ad eseguire una azione richiesta Dangerous Failure Guasto pericoloso Guasto che, potenzialmente, può portare la SRP/CS in uno stato pericoloso e/o inibirne la capacità di effettuare la propria funzione PL (Performance Level) - Livello di prestazione Livello discreto usato per per specificare la capacità di un sistema di comando legato alla sicurezza di effettuare una funzione di sicurezza in determinate condizioni. 10
11 Termini e definizione PLr (Performance Level Required) - Livello di prestazione richiesto Valore di PL minimo da raggiungere dalla SRP/CS, determinato dalla figura A.1 della UNI EN ISO MTTFd (Mean Time To Dangerous Failure) - Tempo medio ad un guasto pericoloso. B10d Tempo medio al verificarsi di un guasto pericoloso, espresso in anni. Numero dei cicli per il quale il 10% dei componenti ha subito un guasto pericoloso DC (Diagnostic Coverage) Copertura diagnostica Valore della capacità del SRP/CS di rilevare i guasti pericolosi, espresso come il rapporto tra la probabilità di guasti pericolosi diagnosticabili ed il totale dei guasti pericolosi che possono avvenire. Valore espresso in percentuale. CCF (Common Cause Failure) Guasti di causa comune Guasto di più di un entità, risultato di un singolo evento, dove un guasto non è conseguenza di altri. Tm (Mission Time) Tempo di utilizzo Periodo di tempo che copre l'utilizzo previsto di un SRP/CS. 11
12 Termini e definizione PLr (Performance Level Required) - Livello di prestazione richiesto Valore di PL minimo da raggiungere dalla SRP/CS, determinato dalla figura A.1 della UNI EN ISO MTTFd (Mean Time To Dangerous Failure) - Tempo medio ad un guasto pericoloso. B10d Tempo medio al verificarsi di un guasto pericoloso, espresso in anni. Numero dei cicli per il quale il 10% dei componenti ha subito un guasto pericoloso DC (Diagnostic Coverage) Copertura diagnostica Valore della capacità del SRP/CS di rilevare i guasti pericolosi, espresso come il rapporto tra la probabilità di guasti pericolosi diagnosticabili ed il totale dei guasti pericolosi che possono avvenire. Valore espresso in percentuale. CCF (Common Cause Failure) Guasti di causa comune Guasto di più di un entità, risultato di un singolo evento, dove un guasto non è conseguenza di altri. Tm (Mission Time) Tempo di utilizzo Periodo di tempo che copre l'utilizzo previsto di un SRP/CS. 12
13 Il PL (performace level) Quanto maggiore è il contributo alla riduzione del rischio tanto più bassa è la Probabilità media di guasto pericoloso/ora. Il PL è funzione della architettura del sistema di controllo, della affidabilità dei componenti, della capacità di rilevare per tempo eventuali guasti interni che potrebbero limitare la funzione di sicurezza e della qualità del progetto. 13
14 Il PL (performace level) Il seguente prospetto riassume gli aspetti qualitativi e quantitativi da rispettare se si vuole progettare un sistema di controllo di sicurezza conforme alla EN MTTFd per i singoli componenti (misura della affidabilità) Aspetti quantitativi DCavg (misura della capacità di diagnostica) CCF (Grado d'indipendenza al guasto) PL Categorie (descrizione della struttura) Aspetti qualitativi Comportamento del sistema di sicurezza in condizioni di guasto Controllo dei guasti sistematici Software di sicurezza Possibilità di adempiere alla funzione di sicurezza in determinate condizioni ambientali 14
15 PL o Performance Level Il progettista, per poter dichiarare un determinato valore di PL deve: Calcolare la Probabilità media di guasto pericoloso/ora del circuito di controllo realizzato, dimostrare di aver ottemperato a tutti i requisiti riguardanti gli aspetti qualitativi stabiliti dalla norma. Il progetto dovrà poi essere validato utilizzando la ISO EN Sicurezza del macchinario - Parti dei sistemi di comando legate alla sicurezza - Parte 2: Validazione. Essa definisce le procedure e le condizioni da seguire per la convalida mediante analisi e prove: della funzione di sicurezza fornita della categoria raggiunta del livello di prestazione raggiunto. 15
16 PL o Performance Level IMPORTANTE! Il valore PFHd è solo uno dei parametri che contribuiscono all assegnazione del PL. Bisogna altresì dimostrare e documentare di aver preso in considerazione e rispettato tutti i requisiti relativi: al controllo dei guasti sistematici; all uso di componenti robusti e affidabili (rispondenti a norme di prodotto, ove disponibili); all uso di norme di buona tecnica; di aver tenuto conto delle condizioni ambientali in cui dovrà operare il sistema di sicurezza; nel caso sia stato necessario scrivere software, di aver adottato tutti gli aspetti di organizzazione esemplificati nel modello di sviluppo a V di Fig. 6 della norma ISO EN e di aver rispettato i requisiti di sviluppo sia per il software applicativo che per quello incorporato. 16
17 Processo di progettazione di un SRP/CS Il processo di progettazione di un SRP/CS secondo la ISO EN può essere riassunto nei seguenti otto passi: 1. Individuazione della funzione di sicurezza tramite l analisi dei rischi 2. Assegnazione del Performance Level richiesto (PLr) tramite il grafico dei rischi 3. Scelta della struttura del sistema (architetture) e delle tecniche di autodiagnosi 4. Realizzazione tecnica del sistema di controllo 5. Calcolo di MTTFd, DCavg e verifica di CCF (non esemplificato in questa presentazione) 6. Calcolo di PL, per esempio tramite la Tabella 5 7. Verifica del PL (se il PL calcolato è inferiore al PLr occorre ritornare al passo 3) 8. Validazione 17
18 Individuazione della funzione di sicurezza e assegnazione del Performance Level richiesto - PLr Per ogni funzione di sicurezza individuata (Paragrafo 5 della Norma) il progettista decide il contributo alla riduzione del rischio che essa deve fornire, ossia il PLr. Questo contributo non copre il rischio complessivo della macchina, ma solo quella parte del rischio legata alla applicazione di quella particolare funzione di sicurezza. Il Parametro PLr rappresenta il Livello di Prestazione richiesto per quella funzione di sicurezza. Il parametro PL rappresenta invece il Livello di prestazione dell hardware che la implementa. PL>=PLr 18
19 Individuazione della funzione di sicurezza e assegnazione del Performance Level richiesto - PLr Lo strumento che viene utilizzato per stabilire quale dovrà essere il contributo alla riduzione del rischio fornito dalla funzione di sicurezza è un grafico del tipo ad albero delle decisioni che porta ad individuare in modo univoco il valore di PLr (Annesso A della norma). Se vengono individuate più funzioni di sicurezza, per ognuna di esse occorre definire il PLr. 19
20 Grafico per individuare in modo univoco il valore di PLr Nota: al contrario di quanto veniva detto nella EN954-1 a proposito delle Categorie, qui i PLr sono pienamente gerarchici. PLr(e) fornisce il più alto contributo alla riduzione del rischio, PLr(a) il più basso. 20
21 Realizzazione del sistema di controllo di sicurezza e calcolo del PL Dopo aver deciso il valore di PLr necessario bisogna progettare un SRP/CS idoneo, calcolare il PL risultante e verificare che sia maggiore o uguale al PLr. Dalla tabella 3 (vedi pag. 19) si vede che per ricavare il valore di PL occorre calcolare la Probabilità media di guasto pericoloso/ora del sistema di controllo progettato. Esistono diversi metodi per effettuare una stima della Probabilità media di guasto pericoloso/ora di un sistema di controllo di sicurezza. 21
22 Realizzazione del sistema di controllo di sicurezza e calcolo del PL L uso di questi metodi presuppone che per ogni componente si conosca: il tasso di guasto (λ) la percentuale di ripartizione del tasso di guasto per tutte le modalità di guasto del componente (es. per un interruttore ad azione positiva: il contatto non si apre quando richiesto = 20% dei casi, il contatto non si chiude quando richiesto = 80% dei casi) l effetto che ha ogni guasto sul comportamento del sistema di Sicurezza (es. guasto pericoloso- λd oppure guasto non pericoloso-λs) la percentuale di guasti pericolosi rilevati dalle tecniche automatiche di autodiagnosi implementate rispetto al totale dei guasti pericolosi: λdd = λd x DC la percentuale di guasti pericolosi non rilevati dalle tecniche automatiche di autodiagnosi implementate rispetto al totale dei guasti pericolosi: λdu = λd x (1-DC). 22
23 Realizzazione del sistema di controllo di sicurezza e calcolo del PL La ISO EN semplifica il calcolo fornendo una tabella basata sulla modellazione di Markov nella quale il valore di probabilità media di guasto pericoloso per ora è già pre-calcolato per diverse combinazioni di Categorie, e di valori di massima di MTTFd e di DCavg che vengono determinati anch essi tramite tabelle. Indicazione di MTTFd Valori espressi in anni Definizione DCavg Valore di DC DCavg Basso 3 MTTFd < 10 Nessuna DC < 60% Medio 10 MTTFd < 30 Basso 60% DC < 90% Alto 30 MTTFd < 100 Medio 90% DC < 99% Alto 99% DC 23
 nel caso di architetture")
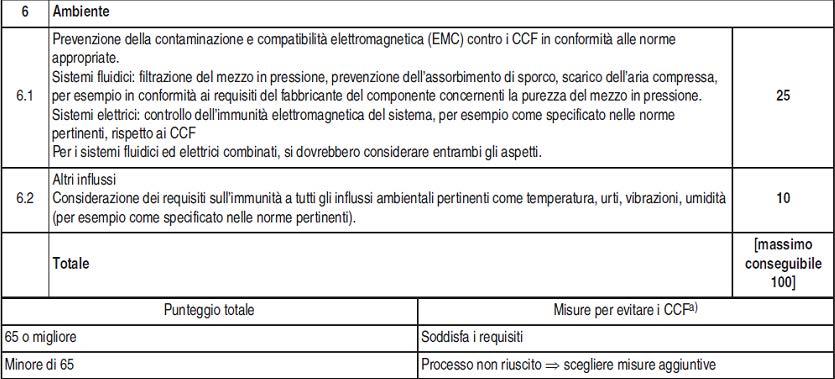
24 Si riconduce tutto a: scelta dell architettura; Calcolo del PL calcolo di DCavg in funzione delle tecniche di autodiagnosi; calcolo semplificato di MTTFd del circuito progettato; verifica rispettato delle condizioni di indipendenza di funzionamento dei canali (CCF) nel caso di architetture ridondanti. 24
25 Calcolo del PL Nel caso che la parte di colonna scelta comprenda due possibili valori di PL si può ricavare il valore puntuale di PL dalla tabella K.1 dell Annesso K della Norma. La Norma può essere usata solo se per il progetto del sistema di controllo ci si avvale di una (o più) delle cinque architetture prefissate. Ad ogni architettura corrisponde una delle categorie definite nella EN Per ogni Livello di Prestazione richiesto sono possibili più scelte. Esempio Per ottenere un sistema con PL pari a c sono possibili: Categoria 3 con MTTFd = basso e DCavg media Categoria 3 con MTTFd = medio e DCavg bassa Categoria 2 con MTTFd = medio e DCavg media Categoria 2 con MTTFd = alto e DCavg bassa Categoria 1 con MTTFd = alto. 25
26 Combinazione di più SRP/CS Una funzione di sicurezza può essere composta da uno o più SRP/CS, e più funzioni di sicurezza possono utilizzare gli stessi SRP/CS. I singoli SRP/CS poi, potrebbero essere realizzati con architetture diverse. Se la funzione di sicurezza è realizzata collegando in serie più SRP/CS (es. barriera di sicurezza, logica di controllo, uscita di potenza) e se per ciascuno di essi è noto il PL, la norma fornisce un modo semplice per calcolare il PL totale. Si identifica la parte col PL più basso (PL low), Si identifica il numero di parti che hanno PL = PL low Si inseriscono i dati nella tabella seguente e si ricava il PL totale 26
27 Combinazione di più SRP/CS PL (low) n (low) PL a > a b > 2 2 a b c > 2 2 b c d > 3 3 c d e > 3 3 d e Tabella 3 della EN ISO
28 Combinazione di più SRP/CS Il PL ricavato tramite questa tabella si riferisce a valori di probabilità media di guasto pericoloso per ora che si trovano a meta per ognuno degli intervalli di Tabella 3 della ISO Esempio Sensore PL = d Cat. 2 Unità di controllo PL = e Cat. 4 Attuatore PL = e Cat. 4 Risulta: PL low = d N low = 1 (< 3) Quindi: PL complessivo = d Il valore di Probabilità media di guasto pericoloso per ora dell intero sistema sarà un numero compreso fra 1x10-6 e 1x10-7 (vedere Tabella 3 della EN ISO ). 28
29 Le categorie 29
30 Calcolo MTTFd per componenti con B10d Calcolo MTTFd B 10 d MTTF d = 0,1 n op Dove n op =numero di operazioni n op = d op h op 3600 t cycle h op =ore operativeal giorno[h] d op =giorni operativi all ' anno[gg] t cycle =tempoche intercorre tradue succesive richieste d ' intervento[s] 30
31 Metodo semplificato per la stima di MTTFd Calcolo MTTFd Ñ 1 = MTTF d i=1 1 MTTF di I L O 1 = 1 + MTTF dtot MTTF di 1 MTTF dl + 1 MTTF do 31
32 MTTFd diverso per 2 canali, simmetrizzazione per ciascun canale Calcolo MTTFd I L O I L O MTTF d = 2 3 [MTTF dc 1+MTTF dc 2 1 ] MTTF dc 1 MTTF dc 2 32
33 Misure DC Dipendente da Dispositivi d'ingresso La copertura diagnostica Stimolo di prova ciclico mediante variazione dinamica dei segnali d ingresso Controllo di plausibilità, per esempio utilizzo di contatti collegati meccanicamente normalmente aperti e normalmente chiusi. Monitoraggio incrociato degli ingressi senza prova dinamica Monitoraggio incrociato dei segnali di ingresso con prova dinamica se i cortocircuiti non sono rilevabili (e.s I/O multipli) Monitoraggio incrociato dei segnali di ingresso e dei risultati all'interno della logica (L), monitoraggio software temporale e logico del flusso di programma e rilevamento della avarie statiche e dei cortocircuiti (per I/O multipli) Monitoraggio indiretto (per esempio monitoraggio mediante pressostato, monitoraggio elettrico della posizione degli attuatori) Monitoraggio diretto (per esempio monitoraggio elettrico di posizione delle valvole di comando, monitoraggio dei dispositivi elettromeccanici mediante elementi di contatto collegati meccanicamente) Non suff. Per PL in funzione della frequenza di cambiamento del segnale da parte dell'applicazione in funzione dell'applicazione Rilevamento delle avarie mediante processo 0 99 in funzione dell'applicazione e Monitoraggio di alcune caratteristiche del sensore (tempo di risposta, intervallo dei segnali analogici, per esempio resistenza elettrica, capacita)
34 La copertura diagnostica Monitoraggio indiretto (per esempio monitoraggio mediante pressostato, monitoraggio elettrico di posizione degli attuatori) Misure DC Dipendente da Logica Monitoraggio diretto (per esempio monitoraggio elettrico di posizione delle valvole di comando, monitoraggio dei dispositivi elettromeccanici mediante elementi di contatto collegati meccanicamente) Semplice monitoraggio temporale della logica ( per esempio timer come watchdog, in cui i punti di trigger rientrano nel programma della logica) Monitoraggio temporale e logico della logica mediante il watchdog in cui l attrezzatura di prova effettua controlli di plausibilità del comportamento della logica. Autodiagnosi all avvio per rilevare avarie latenti in parti della logica (per esempio programma e memoria dati, porte di ingresso/uscita, interfacce) Controllo della capacita di reazione del dispositivo di monitoraggio (per esempio, watchdog) mediante il canale principale all avvio od ogniqualvolta e richiesta la funzione di sicurezza o e richiesto da un segnale esterno, attraverso un dispositivo in ingresso. Principio dinamico (a tutti i componenti della logica e richiesto di cambiare lo stato ON-OFF-ON quando e richiesta la funzione di sicurezza), per esempio circuito di interblocco implementato mediante relè. Non suff. Per PL in funzione dell'applicazione (in funzione della tecnica di prova) Memoria invariabile: sigla di una parola singola (8 bit) Memoria invariabile: sigla di una parola doppia (16 bit)
35 La copertura diagnostica Misure DC Dipendente da Non suff. Per PL Logica Memoria variabile: Test della RAM mediante l utilizzo di dati ridondanti, per esempio indicatori, marcatori, costanti, timer e confronto incrociato di questi dati. Memoria variabile: controllo della leggibilità e della capacita di scrittura delle celle di memoria dati utilizzati. Memoria variabile: monitoraggio della RAM con codice Hamming modificato o autodiagnosi della RAM (e.s. "galpat" o "Abraham") Unita di elaborazione:autodiagnosi mediante software Unita di elaborazione:elaborazione codificata Rilevamento avarie da parte del processo 0 99 in funzione dell'applicazione e 35
36 La copertura diagnostica Misure DC Dipendente da Dispositivi di uscita Monitoraggio delle uscite mediante un canale senza prova dinamica Monitoraggio incrociato delle uscite senza prova dinamica Monitoraggio incrociato dei segnali di uscita con prova dinamica senza rilevamento dei cortocircuiti (per I/O multipli) Monitoraggio incrociato dei segnali di uscita e dei risultati intermedi all interno della logica (L), monitoraggio software temporale e logico del flusso di programma e rilevamento delle avarie statiche dei cortocircuiti (per I/O multipli) in funzione della frequenza di cambiamento del segnale da parte dell applicazione in funzione della frequenza di cambiamento del segnale da parte dell applicazione Non suff. Per PL Percorso di spegnimento ridondante senza monitoraggio dell attuatore Percorso di spegnimento ridondante con monitoraggio di uno degli attuatori mediante logica o attrezzatura di prova Percorso di spegnimento ridondante con monitoraggio degli attuatori mediante logica o attrezzatura di prova Monitoraggio indiretto (per esempio monitoraggio mediante pressostato, monitoraggio elettrico di posizione degli attuatori) in funzione dell applicazione - Rilevamento avarie da parte del processo 0 99 in funzione dell applicazione e Monitoraggio diretto (per esempio monitoraggio elettrico di posizione delle valvole di comando, monitoraggio dei dispositivi elettromeccanici mediante elementi di contatto collegati meccanicamente)
37 La copertura diagnostica Stima della copertura diagnostica media DC avg I L O I L O DC avg = DC 1 MTTF d 1 + DC 2 MTTF d MTTF d MTTF d DC n MTTF dn 1 MTTF dn 37
38 CCF 38
39 CCF 39

40 GRAZIE PER L'ATTENZIONE 40
Nuove norme per la sicurezza delle macchine
 Machines 2010 :Nuova legge in Europa :Nuove norme Quasi-macchine MTTFd Documenti B10d DC CCF SIL PL Nuove norme per la sicurezza delle macchine Comparazione tra le richieste PL Categorie EN 954-1 Determinazione:
Machines 2010 :Nuova legge in Europa :Nuove norme Quasi-macchine MTTFd Documenti B10d DC CCF SIL PL Nuove norme per la sicurezza delle macchine Comparazione tra le richieste PL Categorie EN 954-1 Determinazione:
Sicurezza ed affidabilità dei sistemi di comando (CR-001)
") 1.2 - Sistemi di comando 1.2.1 - Sicurezza ed affidabilità dei sistemi di comando I sistemi di comando devono essere progettati e costruiti in modo da evitare l'insorgere di situazioni pericolose. In ogni
1.2 - Sistemi di comando 1.2.1 - Sicurezza ed affidabilità dei sistemi di comando I sistemi di comando devono essere progettati e costruiti in modo da evitare l'insorgere di situazioni pericolose. In ogni
Le nuove norme armonizzate EN ISO e EN 62061
 Le nuove norme armonizzate EN ISO 13849-1 e EN 62061 La norma EN 954-1 verrà ritirata il 28.12.2009, il giorno prima dell entrata in vigore della nuova D.M 2006/42/CE. EN 954-1 Sicurezza del macchinario
Le nuove norme armonizzate EN ISO 13849-1 e EN 62061 La norma EN 954-1 verrà ritirata il 28.12.2009, il giorno prima dell entrata in vigore della nuova D.M 2006/42/CE. EN 954-1 Sicurezza del macchinario
ISO Calcolo del PL Performance Level
 ISO 13849-1 Calcolo del PL Performance Level Categorie MTTFd DC CCF ISO 13849-1 Calcolo del PL Performance Level Categorie MTTFd DC CCF PL a PL b PL c MTTF d low medium high PL d PL e DC avg Cat. B 0 Cat.
ISO 13849-1 Calcolo del PL Performance Level Categorie MTTFd DC CCF ISO 13849-1 Calcolo del PL Performance Level Categorie MTTFd DC CCF PL a PL b PL c MTTF d low medium high PL d PL e DC avg Cat. B 0 Cat.
I sistemi di comando delle macchine secondo le norme
 2017 I sistemi di comando delle macchine secondo le norme EN ISO 13849-1 e EN ISO 13849-2 2017 I sistemi di comando delle macchine secondo le norme en Iso 13849-1 e en Iso 13849-2 Pubblicazione realizzata
2017 I sistemi di comando delle macchine secondo le norme EN ISO 13849-1 e EN ISO 13849-2 2017 I sistemi di comando delle macchine secondo le norme en Iso 13849-1 e en Iso 13849-2 Pubblicazione realizzata
Workshop «stato dell arte e normativa: due strumenti per migliorare la sicurezza uomo/macchina»
 Modena, 15 Dicembre 2016 Ing. Luciano Di Donato (Inail) Workshop «stato dell arte e normativa: due strumenti per migliorare la sicurezza uomo/macchina» Il defeating di un dispositivo di interblocco «Sicurezza
Modena, 15 Dicembre 2016 Ing. Luciano Di Donato (Inail) Workshop «stato dell arte e normativa: due strumenti per migliorare la sicurezza uomo/macchina» Il defeating di un dispositivo di interblocco «Sicurezza
Interruttori di sicurezza
 Interruttori di sicurezza Area critica dell impianto La protezione mobile L allegato I della direttiva macchine punto 1.4.2.2 stabilisce i requisiti: - Un ostacolo di natura adeguata garantisca una protezione
Interruttori di sicurezza Area critica dell impianto La protezione mobile L allegato I della direttiva macchine punto 1.4.2.2 stabilisce i requisiti: - Un ostacolo di natura adeguata garantisca una protezione
La sicurezza funzionale vista da vicino: che cosa è il SIL. Micaela Caserza Magro Università di Genova
 La sicurezza funzionale vista da vicino: che cosa è il SIL Micaela Caserza Magro Università di Genova Micaela.caserza@unige.it Che cosa è la sicurezza funzionale La Sicurezza Funzionale è: Porzione della
La sicurezza funzionale vista da vicino: che cosa è il SIL Micaela Caserza Magro Università di Genova Micaela.caserza@unige.it Che cosa è la sicurezza funzionale La Sicurezza Funzionale è: Porzione della
Aspetti metodologici innovativi per la valutazione dei rischi nell'ambito della Nuova Direttiva Macchine
 ISPESL - Politecnico di Bari - ARPA Puglia La sicurezza delle macchine tra nuova Direttiva Macchine e Testo Unico Aspetti metodologici innovativi per la valutazione dei rischi nell'ambito della Nuova Direttiva
ISPESL - Politecnico di Bari - ARPA Puglia La sicurezza delle macchine tra nuova Direttiva Macchine e Testo Unico Aspetti metodologici innovativi per la valutazione dei rischi nell'ambito della Nuova Direttiva
La manomissione dei circuiti di sicurezza nelle macchine SEMINARIO TECNICO. Milano 4 dicembre 2013
 SEMINARIO TECNICO Milano 4 dicembre 2013 LA MANOMISSIONE DEI CIRCUITI DI SICUREZZA NELLE MACCHINE Relatore Dott. Ing. Federico Dosio Copyright F.D. - All rights reserved. - 1-11/17/2013 1 DIRETTIVA 2006/42/CE
SEMINARIO TECNICO Milano 4 dicembre 2013 LA MANOMISSIONE DEI CIRCUITI DI SICUREZZA NELLE MACCHINE Relatore Dott. Ing. Federico Dosio Copyright F.D. - All rights reserved. - 1-11/17/2013 1 DIRETTIVA 2006/42/CE
Aspetti normativi. Decreto legislativo 81/2008 Tutela della salute e della sicurezza nei luoghi di lavoro Articolo 15 Misure generali di tutela
 Decreto legislativo 81/2008 Tutela della salute e della sicurezza nei luoghi di lavoro Articolo 15 Misure generali di tutela Le misure generali di tutela della salute e della sicurezza dei lavoratori nei
Decreto legislativo 81/2008 Tutela della salute e della sicurezza nei luoghi di lavoro Articolo 15 Misure generali di tutela Le misure generali di tutela della salute e della sicurezza dei lavoratori nei
Il Ciclo di Vita della Sicurezza Funzionale
 Il Ciclo di Vita della Sicurezza Funzionale BORTOT Philippe Safety Consultant Italy & EMEA FS Eng (TÜV Rheinland, # 6228/13, Machinery) Copyright 2013 Rockwell Automation, Inc. All rights reserved. 2 Il
Il Ciclo di Vita della Sicurezza Funzionale BORTOT Philippe Safety Consultant Italy & EMEA FS Eng (TÜV Rheinland, # 6228/13, Machinery) Copyright 2013 Rockwell Automation, Inc. All rights reserved. 2 Il
UNI EN ISO 14119 DISPOSITIVI DI INTERBLOCCO ASSOCIATI AI RIPARI
 UNI EN ISO 14119 DISPOSITIVI DI INTERBLOCCO ASSOCIATI AI RIPARI COME EVITARE L ELUSIONE O IL BY-PASS DEI DISPOSITIVI DI INTERBLOCCO ASSOCIATI AI RIPARI 0. Note introduttive per la lettura del presente
UNI EN ISO 14119 DISPOSITIVI DI INTERBLOCCO ASSOCIATI AI RIPARI COME EVITARE L ELUSIONE O IL BY-PASS DEI DISPOSITIVI DI INTERBLOCCO ASSOCIATI AI RIPARI 0. Note introduttive per la lettura del presente
La banca dati infortuni per il settore agricolo e le novità introdotte dalla nuova direttiva macchine
 Dipartimento Tecnologie di Sicurezza La banca dati infortuni per il settore agricolo e le novità introdotte dalla nuova direttiva macchine Vincenzo Laurendi La banca dati infortuni per il settore agricolo
Dipartimento Tecnologie di Sicurezza La banca dati infortuni per il settore agricolo e le novità introdotte dalla nuova direttiva macchine Vincenzo Laurendi La banca dati infortuni per il settore agricolo
Procedura aggiornamento FTC
 Procedura aggiornamento FTC Direttiva macchine 2006/42/CE All. VII EN ISO 9001:2015 STATO DEL DOCUMENTO Rev. Par. Pag. Causa Data 00 --/--/---- 01 02 03 04 05 06 07 08 Rev. Data --/--/--- Elaborazione
Procedura aggiornamento FTC Direttiva macchine 2006/42/CE All. VII EN ISO 9001:2015 STATO DEL DOCUMENTO Rev. Par. Pag. Causa Data 00 --/--/---- 01 02 03 04 05 06 07 08 Rev. Data --/--/--- Elaborazione
La sicurezza delle macchine utensili
 La sicurezza delle macchine utensili Casistica di infortuni derivanti dall uso di macchine utensili Nicola Delussu Coordinamento Tecnico Regioni Gruppo macchine e impianti D.lgs. 81/2008 Art. 70 - Requisiti
La sicurezza delle macchine utensili Casistica di infortuni derivanti dall uso di macchine utensili Nicola Delussu Coordinamento Tecnico Regioni Gruppo macchine e impianti D.lgs. 81/2008 Art. 70 - Requisiti
Norma UNI EN ISO 13849-1
 Sistemi di comando per la sicurezza delle macchine Norma UNI EN ISO 13849-1 Parti dei sistemi di comando legate alla sicurezza. Parte 1: principi generali per la progettazione. Per.Ind. Antonio Rigutto
Sistemi di comando per la sicurezza delle macchine Norma UNI EN ISO 13849-1 Parti dei sistemi di comando legate alla sicurezza. Parte 1: principi generali per la progettazione. Per.Ind. Antonio Rigutto
PRINCIPI PER LA VALUTAZIONE DEL RISCHIO UNI EN 1050 PRINCIPI PER LA DEL RISCHIO VALUTAZIONE. RISCHIO Vittore Carassiti - INFN FE 1
 PRINCIPI PER LA DEL RISCHIO UNI EN 1050 PRINCIPI PER LA DEL RISCHIO RISCHIO Vittore Carassiti - INFN FE 1 SCOPO DELLA NORMA (UNI EN 1050 1) Descrivere le procedure per la stima dei pericoli e la valutazione
PRINCIPI PER LA DEL RISCHIO UNI EN 1050 PRINCIPI PER LA DEL RISCHIO RISCHIO Vittore Carassiti - INFN FE 1 SCOPO DELLA NORMA (UNI EN 1050 1) Descrivere le procedure per la stima dei pericoli e la valutazione
Formazione del personale
 Formazione del personale Salute e sicurezza nei luoghi di lavoro DEFINIZIONI Attrezzatura di lavoro: qualsiasi macchina, apparecchio, utensile o impianto, inteso come il complesso di macchine, attrezzature
Formazione del personale Salute e sicurezza nei luoghi di lavoro DEFINIZIONI Attrezzatura di lavoro: qualsiasi macchina, apparecchio, utensile o impianto, inteso come il complesso di macchine, attrezzature
Safety Speed Monitoring. Considerazioni sui sensori in applicazioni per il controllo della velocità di sicurezza
 Safety Speed Monitoring Considerazioni sui sensori in applicazioni per il controllo della velocità di sicurezza Safety Speed ESEMPI DI COMBINAZIONE TRA SENSORI E MOSAIC MV Encoder Proximity Modulo MV Livello
Safety Speed Monitoring Considerazioni sui sensori in applicazioni per il controllo della velocità di sicurezza Safety Speed ESEMPI DI COMBINAZIONE TRA SENSORI E MOSAIC MV Encoder Proximity Modulo MV Livello
Guida all applicazione della direttiva macchine 2006/42/CE
 Guida all applicazione della direttiva macchine 2006/42/CE Indice Introduzione generale 1 Premessa................................................................. pag. 8 2 L articolo 24...............................................................
Guida all applicazione della direttiva macchine 2006/42/CE Indice Introduzione generale 1 Premessa................................................................. pag. 8 2 L articolo 24...............................................................
Sicuri ma quanto? Introduzione alla Sicurezza Funzionale nei sistemi impieganti azionamenti elettrici ed alla normativa di riferimento.
 Sicuri ma quanto? Introduzione alla Sicurezza Funzionale nei sistemi impieganti azionamenti elettrici ed alla normativa di riferimento. Marco Franchi Ansaldo Sistemi Industriali Gruppo Azionamenti Elettrici
Sicuri ma quanto? Introduzione alla Sicurezza Funzionale nei sistemi impieganti azionamenti elettrici ed alla normativa di riferimento. Marco Franchi Ansaldo Sistemi Industriali Gruppo Azionamenti Elettrici
La Sicurezza nei lavori in presenza di rischio elettrico
 Questa presentazione ha l unico scopo di supportare l illustrazione verbale dell argomento. Essa non è completa né esaustiva ed i concetti espressi hanno valore di esempio e promemoria e non di trattazione
Questa presentazione ha l unico scopo di supportare l illustrazione verbale dell argomento. Essa non è completa né esaustiva ed i concetti espressi hanno valore di esempio e promemoria e non di trattazione
PROCEDURA OPERATIVA PER L ANALISI E LA GESTIONE DEL RISCHIO
 28/06/2011 Pag. 1 di 9 PROCEDURA OPERATIVA PER L ANALISI E LA GESTIONE DEL RISCHIO 1 SCOPO... 2 2 APPLICABILITÀ... 2 3 DOCUMENTI DI RIFERIMENTO... 2 3.1 Moduli... 2 4 RESPONSABILITÀ... 2 5 MODALITÀ OPERATIVE...
28/06/2011 Pag. 1 di 9 PROCEDURA OPERATIVA PER L ANALISI E LA GESTIONE DEL RISCHIO 1 SCOPO... 2 2 APPLICABILITÀ... 2 3 DOCUMENTI DI RIFERIMENTO... 2 3.1 Moduli... 2 4 RESPONSABILITÀ... 2 5 MODALITÀ OPERATIVE...
Gazzetta ufficiale dell'unione europea
 L 185/6 REGOLAMENTO DI ESECUZIONE (UE) 2015/1136 DELLA COMMISSIONE del 13 luglio 2015 che modifica il regolamento di esecuzione (UE) n. 402/2013 relativo al metodo comune di sicurezza per la determinazione
L 185/6 REGOLAMENTO DI ESECUZIONE (UE) 2015/1136 DELLA COMMISSIONE del 13 luglio 2015 che modifica il regolamento di esecuzione (UE) n. 402/2013 relativo al metodo comune di sicurezza per la determinazione
CAPITOLO 1: INTRODUZIONE
 CAPITOLO 1: INTRODUZIONE I componenti di natura elettrica o elettronica sono presenti in molti dispositivi di uso quotidiano. Pensiamo ai controlli elettronici presenti in un'automobile. Essi aiutano il
CAPITOLO 1: INTRODUZIONE I componenti di natura elettrica o elettronica sono presenti in molti dispositivi di uso quotidiano. Pensiamo ai controlli elettronici presenti in un'automobile. Essi aiutano il
CONVEGNO La sicurezza dei prodotti: in particolare delle macchine Bologna, 5 Maggio 2011
 CONVEGNO La sicurezza dei prodotti: in particolare delle macchine Bologna, 5 Maggio 2011 Functional Safety EN ISO 13849-1 Ing. Paolo Carlo De Benedetto Safety Specialist - Pilz Italia S.r.l. Procedura
CONVEGNO La sicurezza dei prodotti: in particolare delle macchine Bologna, 5 Maggio 2011 Functional Safety EN ISO 13849-1 Ing. Paolo Carlo De Benedetto Safety Specialist - Pilz Italia S.r.l. Procedura
INSTALLAZIONE ED ESERCIZIO DEGLI IMPIANTI ELETTRICI DI PROVA CEI EN 50191
 INSTALLAZIONE ED ESERCIZIO DEGLI IMPIANTI ELETTRICI DI PROVA CEI EN 50191 Introduzione La norma EN 50191 definisce in p a r t i c o l a r e i r e q u i s i t i p e r i l f u n z i o n a m e n t o s i c
INSTALLAZIONE ED ESERCIZIO DEGLI IMPIANTI ELETTRICI DI PROVA CEI EN 50191 Introduzione La norma EN 50191 definisce in p a r t i c o l a r e i r e q u i s i t i p e r i l f u n z i o n a m e n t o s i c
Workshop 2012. Associazione Provinciale Periti Industriali TECNOLOGIA GRAN SASSO
 Workshop 2012 Associazione Provinciale Periti Industriali TECNOLOGIA GRAN SASSO Collegio dei Periti Industriali e dei Periti Industriali Laureati di TERAMO Workshop 2012 I settori: -Sicurezza -Automazione
Workshop 2012 Associazione Provinciale Periti Industriali TECNOLOGIA GRAN SASSO Collegio dei Periti Industriali e dei Periti Industriali Laureati di TERAMO Workshop 2012 I settori: -Sicurezza -Automazione
Machines 2010. :Nuova legge in Europa. :Nuove norme. Quasi-macchine. MTTFd. Documenti DC SIL PL. B10d CCF
 Machines 2010 :Nuova legge in Europa :Nuove norme Quasi-macchine MTTFd B10d CCF Documenti DC SIL PL : Nuovi obblighi per progettisti, utilizzatori, costruttori, importatori di macchine: - Nuova Direttiva
Machines 2010 :Nuova legge in Europa :Nuove norme Quasi-macchine MTTFd B10d CCF Documenti DC SIL PL : Nuovi obblighi per progettisti, utilizzatori, costruttori, importatori di macchine: - Nuova Direttiva
SICUREZZA FUNZIONALE SECONDO LE NORME: EN ISO 13849-1 ed EN IEC 62061
 Per_Ind_Valeri_Vanni - PL.doc PAG. 1 DI 8 REV. 00 SAVE DATA: 09/10/12 PRINT DATA: 10/10/12 SICUREZZA FUNZIONALE SECONDO LE NORME: EN ISO 13849-1 ed EN IEC 62061 LA EN 954-1 VA IN PENSIONE A fine 2011,
Per_Ind_Valeri_Vanni - PL.doc PAG. 1 DI 8 REV. 00 SAVE DATA: 09/10/12 PRINT DATA: 10/10/12 SICUREZZA FUNZIONALE SECONDO LE NORME: EN ISO 13849-1 ed EN IEC 62061 LA EN 954-1 VA IN PENSIONE A fine 2011,
MINISTERO DELLE INFRASTRUTTURE. Decreto 5 marzo 2007 (GU 21 marzo 2007, n. 67)
") MINISTERO DELLE INFRASTRUTTURE Decreto 5 marzo 2007 (GU 21 marzo 2007, n. 67) Applicazione della direttiva n. 89/106/CEE sui prodotti da costruzione, recepita con decreto del Presidente della Repubblica
MINISTERO DELLE INFRASTRUTTURE Decreto 5 marzo 2007 (GU 21 marzo 2007, n. 67) Applicazione della direttiva n. 89/106/CEE sui prodotti da costruzione, recepita con decreto del Presidente della Repubblica
CAPITOLO M PROGRAMMA DI QUALITÀ E CONTROLLO
 CAPITOLO M PROGRAMMA DI QUALITÀ E CONTROLLO Obiettivi generali M1 M2 M3 Ogni impianto a tecnologia complessa deve essere progettato, realizzato e condotto secondo i principi della garanzia della qualità,
CAPITOLO M PROGRAMMA DI QUALITÀ E CONTROLLO Obiettivi generali M1 M2 M3 Ogni impianto a tecnologia complessa deve essere progettato, realizzato e condotto secondo i principi della garanzia della qualità,
INDIVIDUAZIONE DEI PRODOTTI E RELATIVE NORME ARMONIZZATE DI RIFERIMENTO
 Allegato 1 INDIVIDUAZIONE DEI PRODOTTI E RELATIVE NORME ARMONIZZATE DI RIFERIMENTO Per i «Sistemi fissi di lotta contro l'incendio - Componenti di estinzione a gas» le norme europee di riferimento sono:
Allegato 1 INDIVIDUAZIONE DEI PRODOTTI E RELATIVE NORME ARMONIZZATE DI RIFERIMENTO Per i «Sistemi fissi di lotta contro l'incendio - Componenti di estinzione a gas» le norme europee di riferimento sono:
Approccio alla nuova normativa macchine con Easy Safe Calculator
 Approccio alla nuova normativa macchine con Easy Safe Calculator SAVE, Verona 21 ottobre 2009 Pierluca Bruna Product Manager Safety & Atex CEI CT 44 Schneider Electric La Direttiva Macchine Il riferimento
Approccio alla nuova normativa macchine con Easy Safe Calculator SAVE, Verona 21 ottobre 2009 Pierluca Bruna Product Manager Safety & Atex CEI CT 44 Schneider Electric La Direttiva Macchine Il riferimento
IL QUADRO NORMATIVO DI RIFERIMENTO PER IL SETTORE
 IL QUADRO NORMATIVO DI RIFERIMENTO PER IL SETTORE Evoluzione degli standard UNI EN ISO 7396-1 ed UNI EN ISO 7396-2. RELATORE: Alessandro Sassi Ente / Azienda: Certiquality S.r.l. POLITECNICO DI MILANO,
IL QUADRO NORMATIVO DI RIFERIMENTO PER IL SETTORE Evoluzione degli standard UNI EN ISO 7396-1 ed UNI EN ISO 7396-2. RELATORE: Alessandro Sassi Ente / Azienda: Certiquality S.r.l. POLITECNICO DI MILANO,
Le novità introdotte dalla EN 81.20:2014 nelle certificazioni degli ascensori. Fabio Battellini
 Le novità introdotte dalla EN 81.20:2014 nelle certificazioni degli ascensori Fabio Battellini UNI EN 81-20:2014 ELEMENTI FONDAMENTALI DELLA CERTIFICAZIONE: Paragrafo 5 UNI EN 81-20:2014 Requisiti di sicurezza
Le novità introdotte dalla EN 81.20:2014 nelle certificazioni degli ascensori Fabio Battellini UNI EN 81-20:2014 ELEMENTI FONDAMENTALI DELLA CERTIFICAZIONE: Paragrafo 5 UNI EN 81-20:2014 Requisiti di sicurezza
legato I - requisiti - ALLEGATO I
 ALLEGATO I - Requisiti essenziali di sicurezza e di tutela della salute relativi alla progettazione e alla costruzione delle Allegato I - requisiti ALLEGATO I - Requisiti essenziali di sicurezza e di tutela
ALLEGATO I - Requisiti essenziali di sicurezza e di tutela della salute relativi alla progettazione e alla costruzione delle Allegato I - requisiti ALLEGATO I - Requisiti essenziali di sicurezza e di tutela
Pluto Manager. Pluto Manager 4/2. Manuale della sicurezza ABB 2TLC172001C0202 4/1
 Pluto Manager Pluto Manager /2 Manuale della sicurezza ABB 2TLC172001C0202 /1 Strumento di programmazione Pluto Manager Utilizzo: Recinzioni Portelli Vantaggi: Software gratuito Scaricabile da www.abb.com/jokabsafety
Pluto Manager Pluto Manager /2 Manuale della sicurezza ABB 2TLC172001C0202 /1 Strumento di programmazione Pluto Manager Utilizzo: Recinzioni Portelli Vantaggi: Software gratuito Scaricabile da www.abb.com/jokabsafety
Safety Standard NEWS 2016
 Safety Standard NEWS 2016 A.C. & E. S.r.l. siemens.com/answers Aggiornamento Legislativo e Normativo Le direttive Direttive Riferimenti superati Riferimenti Attuali Riferimenti futuri In vigore da (data
Safety Standard NEWS 2016 A.C. & E. S.r.l. siemens.com/answers Aggiornamento Legislativo e Normativo Le direttive Direttive Riferimenti superati Riferimenti Attuali Riferimenti futuri In vigore da (data
Sicurezza delle Macchine
 Sicurezza delle Macchine Indicazioni per l applicazione delle norme EN 62061 ed EN ISO 13849-1 2 o Edizione Fachverband Automation S I G L A E D I T O R I A L E Sicurezza delle Macchine Indicazioni per
Sicurezza delle Macchine Indicazioni per l applicazione delle norme EN 62061 ed EN ISO 13849-1 2 o Edizione Fachverband Automation S I G L A E D I T O R I A L E Sicurezza delle Macchine Indicazioni per
Collaudo statico di un ADC
 Collaudo statico di un ADC Scopo della prova Verifica del funzionamento di un tipico convertitore Analogico-Digitale. Materiali 1 Alimentatore 1 Oscilloscopio 1 Integrato ADC 0801 o equivalente Alcuni
Collaudo statico di un ADC Scopo della prova Verifica del funzionamento di un tipico convertitore Analogico-Digitale. Materiali 1 Alimentatore 1 Oscilloscopio 1 Integrato ADC 0801 o equivalente Alcuni
Informazione Tecnica. Barriere di sicurezza, interfacce di sicurezza, Mosaic, sensori magnetici, barriere di misura
 Codice progressivo BIT interessato Data Emissione BIT_11 Descrizione Oggetto Barriere di sicurezza, interfacce di sicurezza, Mosaic, sensori magnetici, barriere di misura 09/04/2015 Nuovi parametri di
Codice progressivo BIT interessato Data Emissione BIT_11 Descrizione Oggetto Barriere di sicurezza, interfacce di sicurezza, Mosaic, sensori magnetici, barriere di misura 09/04/2015 Nuovi parametri di
Un dispositivo che funziona insieme ad un generatore di segnale [1] per produrre uno strumento di misura.
![Un dispositivo che funziona insieme ad un generatore di segnale [1] per produrre uno strumento di misura.](/thumbs/52/29348130.jpg "Un dispositivo che funziona insieme ad un generatore di segnale [1] per produrre uno strumento di misura.") Allegati Specifici - Allegato MI-007 TASSAMETRI Ai tassametri si applicano i requisiti pertinenti dell'allegato 1, i requisiti specifici di cui al presente allegato e le procedure di accertamento di conformità
Allegati Specifici - Allegato MI-007 TASSAMETRI Ai tassametri si applicano i requisiti pertinenti dell'allegato 1, i requisiti specifici di cui al presente allegato e le procedure di accertamento di conformità
Macchine desilatrici, miscelatrici e/o trinciatrici e distributrici di insilati
 Macchine desilatrici, miscelatrici e/o trinciatrici e distributrici di insilati Nelle macchine con utensili di taglio e di carico o porta di carico è garantita la protezione contro il pericolo di impigliamento
Macchine desilatrici, miscelatrici e/o trinciatrici e distributrici di insilati Nelle macchine con utensili di taglio e di carico o porta di carico è garantita la protezione contro il pericolo di impigliamento
LE DIRETTIVE. CAIEL POINT s.r.l. Via G. Quarenghi, Bergamo telefono fax
 LE DIRETTIVE L esistenza di sistemi legislativi e normativi diversi, costituiva un ostacolo alla libera circolazione dei prodotti in Europa. Quindi si e reso necessario armonizzare le legislazioni degli
LE DIRETTIVE L esistenza di sistemi legislativi e normativi diversi, costituiva un ostacolo alla libera circolazione dei prodotti in Europa. Quindi si e reso necessario armonizzare le legislazioni degli
Sicurezza macchine, tutto da rifare
 Sicurezza macchine, tutto da rifare Felice Lanzetti Pierluca Bruna Schneider Electric CAMBIA IL PANORAMA NORMATIVO PER L ANALISI DEI SISTEMI DI COMANDO La vecchia EN 954-1 con il suo approccio deterministico
Sicurezza macchine, tutto da rifare Felice Lanzetti Pierluca Bruna Schneider Electric CAMBIA IL PANORAMA NORMATIVO PER L ANALISI DEI SISTEMI DI COMANDO La vecchia EN 954-1 con il suo approccio deterministico
QUESTIONARIO PER L EQUIPAGGIAMENTO ELETTRICO DELLE MACCHINE
 QUESTIONARIO PER L EQUIPAGGIAMENTO ELETTRICO DELLE MACCHINE Firma del Committente_ QUESTIONARIO PER L EQUIPAGGIAMENTO ELETTRICO DELLE MACCHINE Ver.2.0 Pagina 1 di 8 1.PREMESSE Il presente questionario
QUESTIONARIO PER L EQUIPAGGIAMENTO ELETTRICO DELLE MACCHINE Firma del Committente_ QUESTIONARIO PER L EQUIPAGGIAMENTO ELETTRICO DELLE MACCHINE Ver.2.0 Pagina 1 di 8 1.PREMESSE Il presente questionario
PL e probabilità di guasto
 PL e probabilità di guasto La EN ISO 13849-1 richiede che per valutare il livello di prestazione PL di un sistema di controllo di sicurezza si calcoli fra l altro la sua probabilità di guasto pericoloso/ora
PL e probabilità di guasto La EN ISO 13849-1 richiede che per valutare il livello di prestazione PL di un sistema di controllo di sicurezza si calcoli fra l altro la sua probabilità di guasto pericoloso/ora
IL MINISTRO DELLE INFRASTRUTTURE IL MINISTRO DELLO SVILUPPO ECONOMICO IL MINISTRO DELL INTERNO
 Decreto del Ministero delle infrastrutture 5 marzo 2007 Applicazione della direttiva n 89/106/CEE sui prodotti da costruzione recepita con D.P.R. 21/04/1993, n 246, relativa all individuazione dei prodotti
Decreto del Ministero delle infrastrutture 5 marzo 2007 Applicazione della direttiva n 89/106/CEE sui prodotti da costruzione recepita con D.P.R. 21/04/1993, n 246, relativa all individuazione dei prodotti
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 Area Comune Processo Gestione del processo produttivo, qualità, funzioni tecniche e logistica interna
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 Area Comune Processo Gestione del processo produttivo, qualità, funzioni tecniche e logistica interna
Lo stato dell arte della tecnologia visto dai fornitori di componenti e sistemi Safety
 PACKOLOGY 2013 Rimini Fiera Convegno: Sicurezza funzionale (UNI EN ISO 13849-1 e CEI EN 62061) delle macchine per il confezionamento e packaging: a che punto siamo Mercoledì 13 Giugno 2013, ore 10.30 13.30
PACKOLOGY 2013 Rimini Fiera Convegno: Sicurezza funzionale (UNI EN ISO 13849-1 e CEI EN 62061) delle macchine per il confezionamento e packaging: a che punto siamo Mercoledì 13 Giugno 2013, ore 10.30 13.30
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
f yd = f yk ; s 0, 7 f yk calcestruzzo armato. Le caratteristiche degli acciai, conformi con le Norme Tecniche, vengono presentate più avanti.
 Acciaio per cemento armato ordinario. Le barre di armatura sono caratterizzate dal diametro della barra tonda equipesante, calcolato nell ipotesi che il peso specifico dell acciaio sia 7850 kg/m 3. Secondo
Acciaio per cemento armato ordinario. Le barre di armatura sono caratterizzate dal diametro della barra tonda equipesante, calcolato nell ipotesi che il peso specifico dell acciaio sia 7850 kg/m 3. Secondo
ACCREDITAMENTO LABORATORI DI ANALISI UNI CEI EN ISO/IEC 17025:2005. Dr.ssa Eletta Cavedoni Cosmolab srl Tortona
 ACCREDITAMENTO LABORATORI DI ANALISI UNI CEI EN ISO/IEC 17025:2005 Dr.ssa Eletta Cavedoni Cosmolab srl Tortona UNI CEI EN ISO/IEC 17025:2005 Titolo: Requisiti generali per la competenza dei laboratori
ACCREDITAMENTO LABORATORI DI ANALISI UNI CEI EN ISO/IEC 17025:2005 Dr.ssa Eletta Cavedoni Cosmolab srl Tortona UNI CEI EN ISO/IEC 17025:2005 Titolo: Requisiti generali per la competenza dei laboratori
MODULO PREREQUISITI OBIETTIVI CONTENUTI ORE
 1 ELETTRONICA DIGITALE Conoscenze di fisica del primo biennio biennio Nozioni di base di elettrotecnica ed elettronica analogica Uso di internet per ricerca materiali e cataloghi. Logica combinatoria Concetto
1 ELETTRONICA DIGITALE Conoscenze di fisica del primo biennio biennio Nozioni di base di elettrotecnica ed elettronica analogica Uso di internet per ricerca materiali e cataloghi. Logica combinatoria Concetto
SERIE SG2-HAND APPLICAZIONI
 safety PROTEZIONE MANOLIGHT CURTAINS SERIE SG-HAND Le barriere di sicurezza SAFEasy TM SG rappresentano l evoluzione naturale della serie SF, prodotto di maggior successo della gamma di dispositivi di
safety PROTEZIONE MANOLIGHT CURTAINS SERIE SG-HAND Le barriere di sicurezza SAFEasy TM SG rappresentano l evoluzione naturale della serie SF, prodotto di maggior successo della gamma di dispositivi di
Dimensioni. Indicatori/Elementi di comando
 3. Rilevatore di loop Dimensioni Codifica d'ordine Allacciamento elettrico Rilevatore di loop V SL SL Caratteristiche Sistema sensori per il rilevamento dei veicoli Interfaccia di controllo completa per
3. Rilevatore di loop Dimensioni Codifica d'ordine Allacciamento elettrico Rilevatore di loop V SL SL Caratteristiche Sistema sensori per il rilevamento dei veicoli Interfaccia di controllo completa per
Installatore: Zone di rischio della serranda motorizzata e del portone a scorrimento verticale (figura 1)
") Installatore: GUIDA TAU PER LA MOTORIZZAZIONE DELLE SERRANDE E DEI PORTONI A SCORRIMENTO VERTICALE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 2006/42/CE E ALLE PARTI APPLICABILI DELLE NORME EN 13241-1, EN 12453,
Installatore: GUIDA TAU PER LA MOTORIZZAZIONE DELLE SERRANDE E DEI PORTONI A SCORRIMENTO VERTICALE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 2006/42/CE E ALLE PARTI APPLICABILI DELLE NORME EN 13241-1, EN 12453,
Esempio di applicazione delle norme EN ISO e EN IEC 62061
 Esempio di applicazione delle norme EN ISO 13849-1 e EN IEC 62061 Esempio: Pressa per cuscinetti Valutazione del rischio Secondo EN ISO 14121 Valutazione del rischio Funzione di sicurezza SF: Il movimento
Esempio di applicazione delle norme EN ISO 13849-1 e EN IEC 62061 Esempio: Pressa per cuscinetti Valutazione del rischio Secondo EN ISO 14121 Valutazione del rischio Funzione di sicurezza SF: Il movimento
Il processo di sterilizzazione
 Il processo di sterilizzazione http://wfhss.com/ Josefa Bizzarro Miniseminario 28 gennaio 2016 CPS-MT di Lugano 1 Metodi di sterilizzazione: collocazione Metodi chimico fisico Ossido di etilene Formald
Il processo di sterilizzazione http://wfhss.com/ Josefa Bizzarro Miniseminario 28 gennaio 2016 CPS-MT di Lugano 1 Metodi di sterilizzazione: collocazione Metodi chimico fisico Ossido di etilene Formald
Sicurezza delle Macchine
 Automatisation Sicurezza delle Macchine Indicazioni per l applicazione delle norme EN 62061 ed EN ISO 13849-1 SIGLA EDITORIALE Sicurezza delle macchine Indicazioni per l applicazione delle norme EN 62061
Automatisation Sicurezza delle Macchine Indicazioni per l applicazione delle norme EN 62061 ed EN ISO 13849-1 SIGLA EDITORIALE Sicurezza delle macchine Indicazioni per l applicazione delle norme EN 62061
PONTEGGI E SISTEMI ANTICADUTA
 PONTEGGI E SISTEMI ANTICADUTA PREMESSA Il presente volume ha lo scopo di fornire i criteri teorici e pratici di esecuzione e le misure di sicurezza per lo svolgimento dei lavori temporanei in quota per
PONTEGGI E SISTEMI ANTICADUTA PREMESSA Il presente volume ha lo scopo di fornire i criteri teorici e pratici di esecuzione e le misure di sicurezza per lo svolgimento dei lavori temporanei in quota per
REGOLAMENTO DELEGATO (UE) /... DELLA COMMISSIONE. del
 /... DELLA COMMISSIONE. del") COMMISSIONE EUROPEA Bruxelles, 10.6.2015 C(2015) 3759 final REGOLAMENTO DELEGATO (UE) /... DELLA COMMISSIONE del 10.6.2015 che stabilisce, in conformità al regolamento (UE) n. 1303/2013 del Parlamento
COMMISSIONE EUROPEA Bruxelles, 10.6.2015 C(2015) 3759 final REGOLAMENTO DELEGATO (UE) /... DELLA COMMISSIONE del 10.6.2015 che stabilisce, in conformità al regolamento (UE) n. 1303/2013 del Parlamento
D.Lgs 81/08 art. 96 c.1. Contenuti minimi del POS in presenza di rischi elettrici
 D.Lgs 81/08 art. 96 c.1 Contenuti minimi del POS in presenza di rischi elettrici POS: Il Piano Operativo di Sicurezza (POS) è un documento, redatto dal datore di lavoro, in cui devono essere riportate
D.Lgs 81/08 art. 96 c.1 Contenuti minimi del POS in presenza di rischi elettrici POS: Il Piano Operativo di Sicurezza (POS) è un documento, redatto dal datore di lavoro, in cui devono essere riportate
La Direttiva Macchine e le Norme di Sicurezza
 Sicurezza Seminario sulla implementazione della sicurezza elettrica nelle macchine SPS / IPC / Drives Parma 22 maggio 2012 relatore: Gianpiero Tomassini Eaton Industries (Italy) s.r.l. Sicurezza - L evoluzione
Sicurezza Seminario sulla implementazione della sicurezza elettrica nelle macchine SPS / IPC / Drives Parma 22 maggio 2012 relatore: Gianpiero Tomassini Eaton Industries (Italy) s.r.l. Sicurezza - L evoluzione
I REQUISITI INNOVATIVI DELLA ISO Alessandra Peverini Perugia 23 ottobre 2015
 I REQUISITI INNOVATIVI DELLA ISO 9001 Alessandra Peverini Perugia 23 ottobre 2015 Le principali novità 1. Le relazioni fra l Organizzazione ed il contesto interno ed esterno 2. Le aspettative delle parti
I REQUISITI INNOVATIVI DELLA ISO 9001 Alessandra Peverini Perugia 23 ottobre 2015 Le principali novità 1. Le relazioni fra l Organizzazione ed il contesto interno ed esterno 2. Le aspettative delle parti
Installatore: (Nome, indirizzo, telefono)
") Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N. 2 PER LA MOTORIZZAZIONE DEI CANCELLI A BATTENTE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 98/37/CE E ALLE PARTI APPLICABILI DELLE NORME EN 13241-1, EN
Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N. 2 PER LA MOTORIZZAZIONE DEI CANCELLI A BATTENTE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 98/37/CE E ALLE PARTI APPLICABILI DELLE NORME EN 13241-1, EN
Affidabilità e Manutenibilità
 Affidabilità e Manutenibilità Tiziano Iob Libero professionista collegio dei periti industriali e periti industriali laureati della Provincia di udine Premesse Per evidenti ragioni di sicurezza, le tecniche
Affidabilità e Manutenibilità Tiziano Iob Libero professionista collegio dei periti industriali e periti industriali laureati della Provincia di udine Premesse Per evidenti ragioni di sicurezza, le tecniche
Sicurezza e funzionalità: un unione non facile da realizzare Gli aspetti importanti da considerare in caso di integrazione di sensori Ex-i in un PLC
 Sicurezza e funzionalità: un unione non facile da realizzare Gli aspetti importanti da considerare in caso di integrazione di sensori Ex-i in un PLC La realizzazione di un classico loop di corrente per
Sicurezza e funzionalità: un unione non facile da realizzare Gli aspetti importanti da considerare in caso di integrazione di sensori Ex-i in un PLC La realizzazione di un classico loop di corrente per
Manuale ANCORAGGIO STRUTTURALE KIT STAFFE FISSAGGIO PALO ART
 Manuale ANCORAGGIO STRUTTURALE KIT STAFFE FISSAGGIO PALO ART. 50080 2 EDIZIONE LUGLIO 2012 Indice SOMMARIO ELEMENTO DI ANCORAGGIO STRUTTURALE Descrizione del prodotto Modalità d uso e limite di utilizzo
Manuale ANCORAGGIO STRUTTURALE KIT STAFFE FISSAGGIO PALO ART. 50080 2 EDIZIONE LUGLIO 2012 Indice SOMMARIO ELEMENTO DI ANCORAGGIO STRUTTURALE Descrizione del prodotto Modalità d uso e limite di utilizzo
NORME ARMONIZZATE AI SENSI DELLA DIRETTIVA MACCHINA 98/37/CE CEI EN
 Per_Ind_Valeri_Vanni NUOVE NORME.doc PAG. 1 DI 10 REV. 00 SAVE DATA: 09/10/12 PRINT DATA: 10/10/12 NORME ARMONIZZATE AI SSI DELLA DIRETTIVA MACCHINA 98/37/CE 1. CEI 60204-1:2006 sicurezza degli equipaggiamenti
Per_Ind_Valeri_Vanni NUOVE NORME.doc PAG. 1 DI 10 REV. 00 SAVE DATA: 09/10/12 PRINT DATA: 10/10/12 NORME ARMONIZZATE AI SSI DELLA DIRETTIVA MACCHINA 98/37/CE 1. CEI 60204-1:2006 sicurezza degli equipaggiamenti
15. Verifica delle tabelle della verità di alcune porte logiche
 Scopo della prova 15. Verifica delle tabelle della verità di alcune porte logiche Ricavare le tabelle della verità di diverse porte logiche. Materiali e strumentazione 1 Alimentatore da 5 15 V, 1 A 1 Voltmetro
Scopo della prova 15. Verifica delle tabelle della verità di alcune porte logiche Ricavare le tabelle della verità di diverse porte logiche. Materiali e strumentazione 1 Alimentatore da 5 15 V, 1 A 1 Voltmetro
Norma CEI : Impianti elettrici utilizzatori a tensione nominale non superiore a 1000 V in corrente alternata e a 1500 V in corrente continua
 Norma CEI 64-8 2012: Impianti elettrici utilizzatori a tensione nominale non superiore a 1000 V in corrente alternata e a 1500 V in corrente continua Norma CEI 64-8 Edizione 2012 Impianti elettrici utilizzatori
Norma CEI 64-8 2012: Impianti elettrici utilizzatori a tensione nominale non superiore a 1000 V in corrente alternata e a 1500 V in corrente continua Norma CEI 64-8 Edizione 2012 Impianti elettrici utilizzatori
D.M. 14/01/2008, Il Regolamento(UE) n. 305/2011 sui prodotti da costruzione(cpr)
 n. 305/2011 sui prodotti da costruzione(cpr)") Il contesto Normativo e gli obblighi per le aziende: D.M. 14/01/2008, Il Regolamento(UE) n. 305/2011 sui prodotti da costruzione(cpr) Igor SOLUSTRI RINA Services S.p.A. Product Certification Il panorama
Il contesto Normativo e gli obblighi per le aziende: D.M. 14/01/2008, Il Regolamento(UE) n. 305/2011 sui prodotti da costruzione(cpr) Igor SOLUSTRI RINA Services S.p.A. Product Certification Il panorama
Necessità di progetto: SI, secondo guida CEI 0-2, se classificato come ambiente ad uso medico o se di superficie superiore a 400 m 2
 Norme di riferimento: Norma CEI 64-8 Impianti elettrici utilizzatori a tensione nominale non superiore a 1000 V in corrente alternata e a 1500 V in corrente continua Norma CEI 64-8 /7 Sezione 710 Ambienti
Norme di riferimento: Norma CEI 64-8 Impianti elettrici utilizzatori a tensione nominale non superiore a 1000 V in corrente alternata e a 1500 V in corrente continua Norma CEI 64-8 /7 Sezione 710 Ambienti
TECNOLOGIE BIOMEDICALI
 TECNOLOGIE BIOMEDICALI APPARECCHIATURE BIOMEDICHE CONFORMITA DI UTILIZZO PREVISTA DAL FABBRICANTE COMPATIBILITA ELETROMAGNETICA VERIFICHE DI SICUREZZA ELETTRICA APPARECCHIATURE BIOMEDICHE - DEFINIZIONE
TECNOLOGIE BIOMEDICALI APPARECCHIATURE BIOMEDICHE CONFORMITA DI UTILIZZO PREVISTA DAL FABBRICANTE COMPATIBILITA ELETROMAGNETICA VERIFICHE DI SICUREZZA ELETTRICA APPARECCHIATURE BIOMEDICHE - DEFINIZIONE
CONTROLLO PRESENZA SERIE SG2-PRESENCE CONTROL APPLICAZIONI
 safety CONTROLLO PRESENZA LIGHT CURTAINS SERIE SG-PRESENCE CONTROL Le barriere di sicurezza SAFEasy SG rappresentano l evoluzione naturale della serie SF, prodotto di maggior successo della gamma di dispositivi
safety CONTROLLO PRESENZA LIGHT CURTAINS SERIE SG-PRESENCE CONTROL Le barriere di sicurezza SAFEasy SG rappresentano l evoluzione naturale della serie SF, prodotto di maggior successo della gamma di dispositivi
Verifica ed analisi dei rischi per porte basculanti
 Verifica ed analisi dei rischi per porte basculanti Rev 3.00 In conformità alla Direttiva Macchine 98/37/CE e alle parti applicabili delle norme EN 13241-1; EN 12453; EN 12445; EN 12635. 01/09/2007 Nota:
Verifica ed analisi dei rischi per porte basculanti Rev 3.00 In conformità alla Direttiva Macchine 98/37/CE e alle parti applicabili delle norme EN 13241-1; EN 12453; EN 12445; EN 12635. 01/09/2007 Nota:
In altri termini cos è
 Qualità Qualità?... Treviso, 20 ottobre 2012 Scuola di formazione delle AVIS del Triveneto Slide n. 2 Qualità è.. In altri termini cos è L insieme delle caratteristiche di un prodotto / servizio che lo
Qualità Qualità?... Treviso, 20 ottobre 2012 Scuola di formazione delle AVIS del Triveneto Slide n. 2 Qualità è.. In altri termini cos è L insieme delle caratteristiche di un prodotto / servizio che lo
Installatore: (Nome, indirizzo, telefono)
") Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N.3 PER L INSTALLAZIONE DI PORTE BASCULANTI DA GARAGE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 98/37/CE E ALLE NORME EN 12453 - EN 12445 Con la presente
Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N.3 PER L INSTALLAZIONE DI PORTE BASCULANTI DA GARAGE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 98/37/CE E ALLE NORME EN 12453 - EN 12445 Con la presente
Scheda tecnica online UE43-2MF2D2 UE43-2MF DISPOSITIVI DI COMANDO E SICUREZZA
 Scheda tecnica online UE43-2MF2D2 UE43-2MF A B C D E F L'immagine potrebbe non corrispondere Informazioni per l'ordine Tipo Cod. art. UE43-2MF2D2 6024893 ulteriori esecuzioni degli apparecchi e accessori
Scheda tecnica online UE43-2MF2D2 UE43-2MF A B C D E F L'immagine potrebbe non corrispondere Informazioni per l'ordine Tipo Cod. art. UE43-2MF2D2 6024893 ulteriori esecuzioni degli apparecchi e accessori
MANUALE DELLA QUALITÀ SIF CAPITOLO 03 (ED.03) TERMINI E DEFINIZIONI
 TERMINI E DEFINIZIONI") INDICE 3.1 Termini e Definizioni 3.2 Acronimi 3.3 Modifiche Redatto da Controllato ed approvato da Ida Ceserani Achille Caputi Data 24 aprile 2008 Pagina 1 di 6 3.1 Termini e definizioni Nel Manuale della
INDICE 3.1 Termini e Definizioni 3.2 Acronimi 3.3 Modifiche Redatto da Controllato ed approvato da Ida Ceserani Achille Caputi Data 24 aprile 2008 Pagina 1 di 6 3.1 Termini e definizioni Nel Manuale della
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTI CLASSI PROGRAMMAZIONE ANNUALE A.S. 2016-2017 MECCANICA e MECCATRONICA MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTI CLASSI PROGRAMMAZIONE ANNUALE A.S. 2016-2017 MECCANICA e MECCATRONICA MANUTENZIONE
PANORAMICA SULLA DIRETTIVA MACCHINE 2006/42/CE
 PANORAMICA SULLA DIRETTIVA MACCHINE 2006/42/CE Premessa La direttiva individua come: macchine: quasi-macchine: l'insieme equipaggiato o destinato ad essere equipaggiato di un sistema di azionamento diverso
PANORAMICA SULLA DIRETTIVA MACCHINE 2006/42/CE Premessa La direttiva individua come: macchine: quasi-macchine: l'insieme equipaggiato o destinato ad essere equipaggiato di un sistema di azionamento diverso
Installatore: (Nome, indirizzo, telefono)
") Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N. 5 PER LA MOTORIZZAZIONE DELLE PORTE A LIBRO IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 2006/42/CE E ALLE PARTI APPLICABILI DELLE NORME EN 13241-1, EN
Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N. 5 PER LA MOTORIZZAZIONE DELLE PORTE A LIBRO IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 2006/42/CE E ALLE PARTI APPLICABILI DELLE NORME EN 13241-1, EN
KEYSTONE. OM4 - EPI 2 Modulo interfaccia Bluetooth Manuale di istruzioni.
 KEYSTONE Indice 1 Modulo opzionale OM44: interfaccia Bluetooth 1 2 Installazione 2 3 Descrizione dell interfaccia Bluetooth OM4 4 4 Schema elettrico del modulo OM4 5 1. Modulo opzionale 4: interfaccia
KEYSTONE Indice 1 Modulo opzionale OM44: interfaccia Bluetooth 1 2 Installazione 2 3 Descrizione dell interfaccia Bluetooth OM4 4 4 Schema elettrico del modulo OM4 5 1. Modulo opzionale 4: interfaccia
Installatore: (Nome, indirizzo, telefono)
") Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N. 6 PER L INSTALLAZIONE DELLE SERRANDE MOTORIZZATE E DEI PORTONI A SCORRIMENTO VERTICALE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 98/37/CE E ALLE NORME
Installatore: (Nome, indirizzo, telefono) GUIDA UNAC N. 6 PER L INSTALLAZIONE DELLE SERRANDE MOTORIZZATE E DEI PORTONI A SCORRIMENTO VERTICALE IN CONFORMITÀ ALLA DIRETTIVA MACCHINE 98/37/CE E ALLE NORME
PROCEDURA PER LA GESTIONE DELLE AZIONI CORRETTIVE E PREVENTIVE
 Pagina 1 di 8 REGIONE TOSCANA PROCEDURA PER LA GESTIONE DELLE AZIONI CORRETTIVE E PREVENTIVE DISTRIBUZIONE CONTROLLATA NON CONTROLLATA COPIA N DESTINATARIO 00 15-12-2014 Prima emissione Rev. Data Descrizione
Pagina 1 di 8 REGIONE TOSCANA PROCEDURA PER LA GESTIONE DELLE AZIONI CORRETTIVE E PREVENTIVE DISTRIBUZIONE CONTROLLATA NON CONTROLLATA COPIA N DESTINATARIO 00 15-12-2014 Prima emissione Rev. Data Descrizione
UNITA TERMINALI GAS MEDICALI
 UNITA TERMINALI GAS MEDICALI DZ MEDICALE SRL UNIPERSONALE: FABBRICANTE ITALIANO DI DISPOSITIVI MEDICI DAL 1993 APPLICA LA DIRETTIVA 93/42 DAL 1999 EFFETTUA I TESTS PRESSO ENTI ESTERNI PRODUCE SU PROPIA
UNITA TERMINALI GAS MEDICALI DZ MEDICALE SRL UNIPERSONALE: FABBRICANTE ITALIANO DI DISPOSITIVI MEDICI DAL 1993 APPLICA LA DIRETTIVA 93/42 DAL 1999 EFFETTUA I TESTS PRESSO ENTI ESTERNI PRODUCE SU PROPIA
Sicurezza e sicurezza funzionale. Guida generale
 Sicurezza e sicurezza funzionale. Guida generale ABB, da sempre attenta al mondo della sicurezza, offre un portafoglio di prodotti e di soluzioni di automazione innovativo e completo in grado di rispondere
Sicurezza e sicurezza funzionale. Guida generale ABB, da sempre attenta al mondo della sicurezza, offre un portafoglio di prodotti e di soluzioni di automazione innovativo e completo in grado di rispondere
A.S. 2015/16 CLASSE 5 AEE MATERIA: T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI
 A.S. 2015/16 CLASSE 5 AEE MATERIA: T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Applicare i fondamentali
A.S. 2015/16 CLASSE 5 AEE MATERIA: T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Applicare i fondamentali
Codice Progetto proposto UNI Adozione ISO. Titolo
 UNI1602194 Sistemi metallici di evacuazione fumi asserviti ad apparecchi e generatori a combustibile liquido o solido - Criteri di scelta in funzione del tipo di applicazione e relativa designazione del
UNI1602194 Sistemi metallici di evacuazione fumi asserviti ad apparecchi e generatori a combustibile liquido o solido - Criteri di scelta in funzione del tipo di applicazione e relativa designazione del
Capitolo 6 Le infrastrutture SoftWare
 Capitolo 6 Le infrastrutture SoftWare Funzioni del sistema operativo Rendere utilizzabili le risorse fisiche presenti nel sistema informatico: garantire la correttezza e la precisione nell elaborazione
Capitolo 6 Le infrastrutture SoftWare Funzioni del sistema operativo Rendere utilizzabili le risorse fisiche presenti nel sistema informatico: garantire la correttezza e la precisione nell elaborazione
Opzione manutentore impianti elettrici e automazione
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
I contenuti e i vantaggi della certificazione ISO 50001 in relazione agli obblighi del Dlgs 102/2014
 Per una migliore qualità della vita I contenuti e i vantaggi della certificazione ISO 50001 in relazione agli obblighi del Dlgs 102/2014 Alessandro Ficarazzo Certiquality 12 febbraio 2015 QUALITY ENVIRONMENT
Per una migliore qualità della vita I contenuti e i vantaggi della certificazione ISO 50001 in relazione agli obblighi del Dlgs 102/2014 Alessandro Ficarazzo Certiquality 12 febbraio 2015 QUALITY ENVIRONMENT
Realizzazione e collaudo dei trasformatori per gli alimentatori CS2 e CS3. P. Zito, A. Lampasi, G. Maffia, F. Starace. Report RdS/PAR2014/054
 Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Realizzazione e collaudo dei trasformatori per gli alimentatori CS2 e CS3 P.
Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Realizzazione e collaudo dei trasformatori per gli alimentatori CS2 e CS3 P.
Collaudo di macchine e impianti meccanici
 Collaudo di macchine e impianti meccanici 1 2 Il presente opuscolo si rivolge ai fabbricanti e ai responsabili dell immissione sul mercato di macchine e impianti meccanici e descrive i pericoli partico
Collaudo di macchine e impianti meccanici 1 2 Il presente opuscolo si rivolge ai fabbricanti e ai responsabili dell immissione sul mercato di macchine e impianti meccanici e descrive i pericoli partico
GARA NAZIONALE DI ELETTRONICA E TELECOMUNICAZIONI. Progetto di un sistema di riempimento e svuotamento di un contenitore.
 GARA NAZIONALE DI ELETTRONICA E TELECOMUNICAZIONI PROVA SCRITTA 25 NOVEMBRE 2008 Progetto di un sistema di riempimento e svuotamento di un contenitore. Un acquario situato in appartamento è collegato ad
GARA NAZIONALE DI ELETTRONICA E TELECOMUNICAZIONI PROVA SCRITTA 25 NOVEMBRE 2008 Progetto di un sistema di riempimento e svuotamento di un contenitore. Un acquario situato in appartamento è collegato ad
Criteri di valutazione e soluzioni da adottare
 1.5.1 1.5.2 1.5.10 1.5.11 [12] Contatti diretti e indiretti. Dispersione dell energia elettrica. Elettricità statica. [13] Rischi di compatibilità elettromagnetica. Utilizzare componenti e materiali marcati
1.5.1 1.5.2 1.5.10 1.5.11 [12] Contatti diretti e indiretti. Dispersione dell energia elettrica. Elettricità statica. [13] Rischi di compatibilità elettromagnetica. Utilizzare componenti e materiali marcati