Tesina Di Maturità. Alunno : Galota Mario. Classe : 5^B I.T.I.S. Indirizzo: E.Elettrotecnica. Anno Scolastico: Alunno : Galota Mario.
|
|
|
- Iolanda Costa
- 6 anni fa
- Visualizzazioni
Transcript



1 Tesina Di Maturità Classe : 5^B I.T.I.S. Indirizzo: E.Elettrotecnica. Anno Scolastico:
2 T.D.P. : Inseguitore di luce In this project I have examined the data distribution system, in particular the stepper motors which are devices that are fed by a sequence of bits. Obiettivo del progetto : L obiettivo di questo progetto era di realizzare un inseguitore di luce capace di individuare il punto più luminoso all interno di una stanza e quindi una volta individuato il punto più luminoso l inseguitore si fermerà verso la fonte. Inoltre per rendere il progetto più completo si è cercato di creare un software capace di memorizzare il valore più elevato che viene rilevato durante le misurazioni e successivamente se questo valore cambia il dispositivo inizia di nuovo a cercare la fonte che emette più luce e quindi si verificherà uno spostamento del dispositivo. Per migliorare ulteriormente il progetto sono state utilizzate due foto resistenze e a secondo della foto resistenza più luminosa il motore girerà dal lato corrispondente. 2
3 3




4 Componenti utilizzati: Per realizzare questo progetto è stato necessario utilizzare i seguenti componenti: 1. Arduino uno. 2. Motor Schield foto resistenze. 4. Motore passo passo bipolare. 4
5 Principio di funzionamento Come già affermato il progetto che ho realizzato, è un inseguitore di luce, quindi il principale scopo è quello di individuare la fonte più luminosa e qualora la posizione della fonte più luminosa variasse il dispositivo va ad individuare dove si trova la nuova fonte luminosa. Il principio di funzionamento è abbastanza semplice e si basa sul seguente ragionamento: 5
6 Le due foto resistenze devono essere posizionate in modo da risultare a 90 l una rispetto all altra in modo che quando l illuminazione è verticale presentino lo stesso valore di resistenza, mentre i valori di resistenza si sbilanciano allo spostamento della fonte di luce. 6
7 Quando la fonte di luce si muove e di conseguenza il valore delle foto resistenze varia, Arduino deve rilevare il cambiamento rispetto alla condizione iniziale e far muovere il Motore passo passo nella direzione della foto resistenza che riceve più luce, finché la luminosità rilevata non sarà uguale al valore massimo. 7
8 Flow Chart 8
9 Spiegazione: Il flow chart che è stato realizzato rappresenta nelle linee generali il procedimento logico che segue il programma che è stato caricato sul microcontrollore, i passaggi che sono eseguiti sono i seguenti: Inizialmente dopo aver avviato il microcontrollore (alimentandolo), vengono rilevati i valori di luminosità delle rispettive foto resistenze. In seguito viene fatto un confronto tra questi valori per vedere in quale foto resistenza si presenta maggiore luminosità. Successivamente si possono verificare due condizioni che permettono di fare azionare il motore o verso destra o verso sinistra. 9
10 Ipotizzando la prima condizione (più luce sulla foto resistenza destra) il µc confronta questo valore con il valore massimo che è riuscito a trovare fino a quel momento, che viene contenuto in una variabile, e successivamente se il valore di luminosità ricevuto è maggiore di quello contenuto nella variabile allora viene aggiornata la variabile Max.Dx e quindi il motore non si muoverà dalla posizione raggiunta fino a quando non varieranno nuovamente le condizioni. Se invece la condizione iniziale che viene presa in considerazione risulta falsa il dispositivo rimarrà fermo perché già si trova in una posizione dove si presenta un elevata luminosità. Ipotizzando la seconda condizione (più luce sulla foto resistenza sinistra) il µc confronta questo valore con il valore massimo che è riuscito a trovare fino a quel momento, che viene contenuto in una variabile, e successivamente se il valore di luminosità ricevuto è maggiore di quello contenuto nella variabile allora viene aggiornata la variabile Max.Sx e quindi il motore non si muoverà dalla posizione raggiunta fino a quando non varieranno nuovamente le condizioni. Se invece la condizione iniziale che viene presa in considerazione risulta falsa il dispositivo rimarrà fermo perché già si trova in una posizione dove si presenta un elevata luminosità. Quindi questo ciclo si ripete per tutto il tempo durante il quale il dispositivo viene alimentato. Da ciò si deduce che con due foto resistenze si ha il vantaggiò di individuare immediatamente quale sia la zone maggiormente illuminata, e quindi il punto maggiormente illuminato viene individuato in maniera più rapida in quanto il dispositivo inizia a girare dalla parte più illuminata. 10
11 Lo Sketch: Di seguito vengono riportate le parti principali del programma che è stato caricato sul microcontrollore : questa è la parte iniziale dello sketch dove vengono indicate le variabili, e quindi ne viene specificata la loro tipologia; successivamente si procede con il «void Setup» dove vengono impostati i piedini se sono utilizzati come input o come output. 11
12 questa parte rappresenta il programma principale all interno del quale vengono svolti i controlli per capire se si presenta maggiore luce nel trasduttore destro o in quello sinistro; in particolare si presenta la prima condizione quando risulta essere maggiormente illuminata la fotoresistenza di destra. 12
13 Questa invece è la seconda parte, e si riferisce alla seconda condizione che si può verificare, cioè quella di avere maggiore intensità luminosa nella fotoresistenza di sinistra e di conseguenza il motore si azionerà in senso antiorario; inoltre alla fine del programma prima di mettere l ultimo end troviamo i comandi serial pirnt ln che vengono utilizzati per stampare i valori dei trasduttori nell apposito monitor seriale. 13
14 Schema elettrico Questo è lo schema elettrico dell inseguitore di luce che è stato realizzato, e come si può notare la scheda Arduino viene collegata in cascata con un altra scheda che è la Motor schield che in questo caso consente di pilotare il motore passo passo. 14

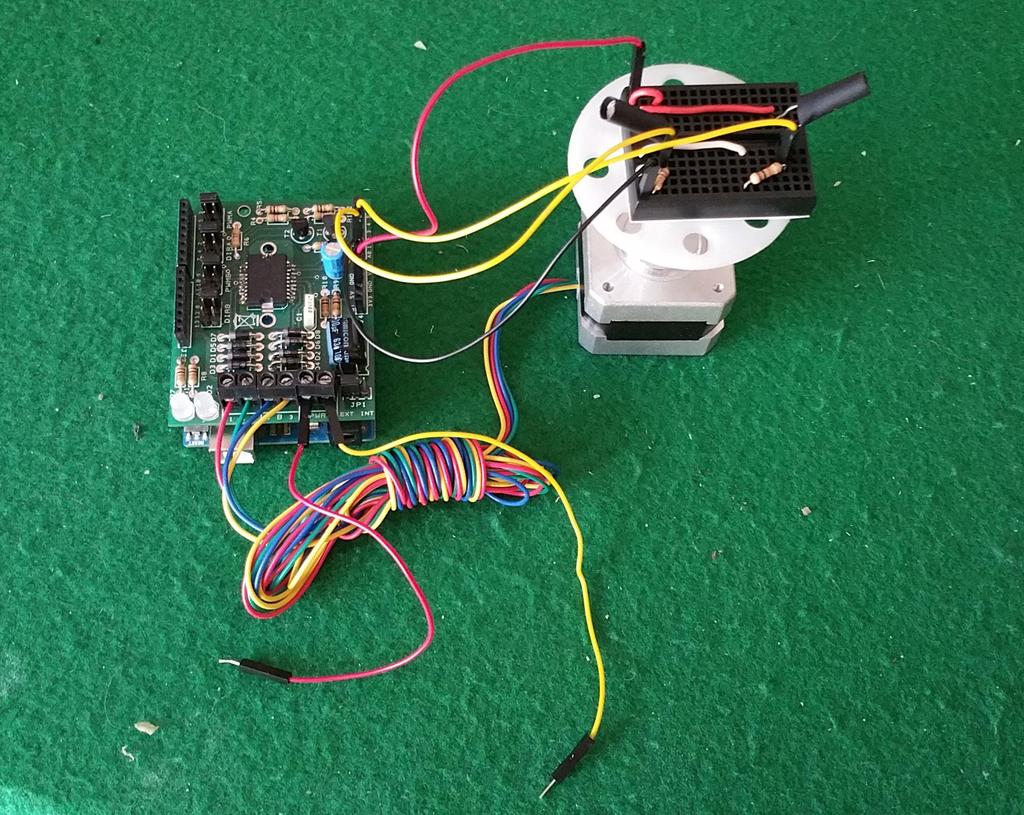
15 Schema di montaggio Lo schema riportato a fianco rappresenta il modo in cui è stato montato il circuito, quindi si può vedere com è stata inserita la Motor Schield, infatti è stata inserita sull Arduino stesso. Si nota inoltre che dalla scheda partono diversi fili, i quattro colorati rappresentano l alimentazione delle bobine del motore, mentre quello nero e quello rosso servono per alimentare il tutto. 15
16 Schema a blocchi Foto resistenze Arduino Uno Motor Schield Motore Passo Passo Adesso iniziamo con la descrizione dei blocchi approfondendo in modo particolare il blocco riguardante il motore passo passo. 16
17 Primo Blocco Fotoresistenze I trasduttori fotoelettrici trasformano variazioni di intensità luminosa in variazioni di grandezza elettrica. A parte i dispositivi fotoemissivi e le celle fotovoltaiche che, rispettivamente, trovano applicazioni nelle misure fotometriche in astronomia e negli esposimetri fotografici, sono gli elementi fotoconduttori che hanno più larghe applicazioni come trasduttori fotoelettrici. Agli elementi fotoconduttori appartengono le fotoresistenze, i fotodiodi e i fototransistori. 17
18 Le fotoresistenze traducono l'informazione luminosa in una variazione di resistenza. Sono realizzate con materiali semiconduttori composti (drogati di tipo N). Le più comuni sono le CdS (solfuro di cadmio) e le PbS (solfuro di piombo). Tra i pregi delle fotoresistenze vi è l'elevata sensibilità e la robustezza. Sono anche economiche e possono essere alimentate sia in corrente continua che alternata. 18

19 Secondo blocco Arduino Arduino è una piattaforma OPEN-SOURCE. Arduino è una semplice scheda di Input/Output con un µc. Implementa Hardware e software facile da utilizzare. Per la programmazione viene utilizzato un linguaggio semplice adatto anche ai principianti. Può essere interfacciato con un PC, tramite cavetto USB. Come già abbiamo visto in precedenza con la scheda Arduino si posso realizzare molti sistemi di controllo dai più semplici ai più complessi. Approfondimento 19

20 Terzo blocco Motor shield Questa scheda è basata su l integrato doppio full bridge L298P in grado di pilotare sia motori DC sia passo-passo. La scheda ha una morsettiera per il collegamento di due motori DC e un motore passo-passo bipolare. È munita pin strip maschio/femmina che consentono l inserimento in cascata di altre schede. L alimentazione può essere fornita dall esterno oppure dalla scheda stessa con una corrente massima di 2 A per fase Approfondimento 20

21 Quarto blocco Motore passo passo bipolare. I motori passo passo sono dei particolari motori in corrente continua la cui rotazione è ottenuta mediante l eccitazione in sequenza degli avvolgimenti in esso contenuti. Le differenze maggiori con i comuni motori in corrente continua sono: la mancanza di spazzole, la presenza di un maggior numero di fili, la possibilità di conoscere la posizione dell albero senza l utilizzo degli encoder. Le caratteristiche del motore, che di solito sono riportate dal costruttore ci permettono di capire quale può essere l impiego. 21
22 Classificazione dei motori passo passo I motori passo passo possono essere classificati in due differenti tipologie : Unipolari: sono i più semplici da pilotare in quanto la sequenza della rotazione è espressa dal succedersi dell eccitazione delle bobine di cui è composto. Bipolari: sono più complessi rispetto ai primi in quanto la rotazione avviene con un campo magnetico generato dalla corrente che percorre in entrambi i sensi le bobine. C è da dire però che i bipolari sviluppano maggiore forza rispetto agli unipolari in quanto la rotazione è prodotta da due avvolgimenti contemporaneamente. I motori passo passo si caratterizzano anche per il numero di fili di cui sono fatti che possono essere: 4, 5, 6, 8; quindi per quelli unipolari avremo (5, 6, o 8 conduttori) o bipolare (4, 8 conduttori). 22
23 Motori passo passo a 4 fili In figura è rappresentato un motore passo passo bipolare a 4 fili, pilotare questi motori è possibile facendo percorrere alla corrente gli avvolgimenti in entrambi i versi in modo alternato, in modo da formare un campo magnetico necessario alla corretta rotazione, inoltre c è da dire che questi motori non possono essere pilotati in altro modo. 23
24 Motori passo passo a 5 fili In figura è rappresentato un motore a 5 fili, questi motori sono di tipo unipolare. Per pilotare questi motori è necessario alimentare le fasi nella sequenza desiderata, ad esempio per produrre una rotazione in senso orario dell albero partendo da una situazione come quella illustrata in figura si deve applicare una tensione nella sequenza B+,A+,B-,A-; in senso antiorario avremo quindi la sequenza: B-,A+,B+,A-. 24
25 Motori passo passo a 6 fili Il motore illustrato in figura è un motore passo passo unipolare a sei fili, la figura mostra lo schema costruttivo evidenziando come gli avvolgimenti sono uniti tra di loro. Per pilotare questi motori si può adottare una tecnica simile a quella dei motori a cinque fili, in quanto i comuni delle due fasi (A e B) possono essere connessi assieme rendendo il motore simile a quello a cinque fili. Inoltre è possibile gestire le fasi A e B in maniera indipendente non solo attraverso i terminali A+, A-, B+, B- ma applicando corrente in modo indipendente su A e B. 25
26 Motori passo passo a 8 fili I motori a 8 fili possono essere utilizzati sia in configurazione unipolare che in configurazione bipolare. Lo schema di costruzione riportato in figura mostra le due bobine ciascuna con due terminali indipendenti. Questi motori vengono configurati in base alle necessità che si hanno nel progetto, e quindi in base al lavoro che devono compiere. 26
27 GRAZIE PER L ATTENZIONE! Galota Mario 27
8^ parte : Come riconoscere i motori passo-passo. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 8^ parte : Come riconoscere i motori passo-passo Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) I motori passo-passo sono particolari motori in corente continua la cui rotazione è ottenuta
8^ parte : Come riconoscere i motori passo-passo Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) I motori passo-passo sono particolari motori in corente continua la cui rotazione è ottenuta
INSEGUITORE SOLARE CON ARDUINO. Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3.
 INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
8^ parte : Come pilotare i motori passo-passo unipolari. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 8^ parte : Come pilotare i motori passo-passo unipolari Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) In questo articolo inizieremo analizzando lo schema di collegamento del nostro circuito.
8^ parte : Come pilotare i motori passo-passo unipolari Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) In questo articolo inizieremo analizzando lo schema di collegamento del nostro circuito.
HP LED Driver Shield. EtherMania di Signorini Marco Via Cadore 9 21046 MALNATE (VA) P.I. 03111760124 REA VA-324137 http://www.ethermania.
 P.I. 03111760124 REA VA-324137 http://www.ethermania.") HP LED Driver Shield Introduzione Lo HPLEDDriverShield e' uno shield per Arduino (UNO e Mega 2560) che permette di pilotare fino a 4 stringhe di LED High Power. Ogni canale e' dotato di un preciso generatore
HP LED Driver Shield Introduzione Lo HPLEDDriverShield e' uno shield per Arduino (UNO e Mega 2560) che permette di pilotare fino a 4 stringhe di LED High Power. Ogni canale e' dotato di un preciso generatore
PRIMI PASSI CON ARDUINO
 PRIMI PASSI CON ARDUINO 1) Accensione e spegnimento del led presente sulla scheda Arduino. La scheda Arduino presenta, a bordo, alcuni led uno dei quali può essere controllato dal pin digitale 13; quando
PRIMI PASSI CON ARDUINO 1) Accensione e spegnimento del led presente sulla scheda Arduino. La scheda Arduino presenta, a bordo, alcuni led uno dei quali può essere controllato dal pin digitale 13; quando
Display numerico con i LED
 Display numerico con i LED Ferrari, Porti, Zannetti 1 febbraio 2016 1 Scheda Questo progetto prevede l unione di più caratteristiche prese dai vari progetti fatti in precedenza, per riuscire a formare
Display numerico con i LED Ferrari, Porti, Zannetti 1 febbraio 2016 1 Scheda Questo progetto prevede l unione di più caratteristiche prese dai vari progetti fatti in precedenza, per riuscire a formare
Internetworking V a nno
 Internetworking V anno Introduzione ad Arduino Introduzione La scheda Arduino nasce nel 2005 dall idea di alcuni giovani ricercatori guidati da Massimo Banzi. Il loro obiettivo era quello di creare una
Internetworking V anno Introduzione ad Arduino Introduzione La scheda Arduino nasce nel 2005 dall idea di alcuni giovani ricercatori guidati da Massimo Banzi. Il loro obiettivo era quello di creare una
Il protocollo RS Introduzione. 1.2 Lo Standard RS-232
 1 Il protocollo RS232 1.1 Introduzione Come noto un dispositivo di interfaccia permette la comunicazione tra la struttura hardware di un calcolatore e uno o più dispositivi esterni. Uno degli obiettivi
1 Il protocollo RS232 1.1 Introduzione Come noto un dispositivo di interfaccia permette la comunicazione tra la struttura hardware di un calcolatore e uno o più dispositivi esterni. Uno degli obiettivi
SENSORI OTTICI - FOTORESISTENZE
 SENSORI OTTICI - FOTORESISTENZE ComponentI elettronici con resistenza inversamente proporzionale alla quantità di luce che lo colpisce. La corrente che attraversa una fotoresistenza è direttamente proporzionale
SENSORI OTTICI - FOTORESISTENZE ComponentI elettronici con resistenza inversamente proporzionale alla quantità di luce che lo colpisce. La corrente che attraversa una fotoresistenza è direttamente proporzionale
 Servomotori I servomotori sono motori conosciuti anche come servocomandi, motori servo, o più concisamente servo. In questa lezione andremo ad illustrare questi dispositivi in modo semplice e completo,
Servomotori I servomotori sono motori conosciuti anche come servocomandi, motori servo, o più concisamente servo. In questa lezione andremo ad illustrare questi dispositivi in modo semplice e completo,
Per vedere tutti i tutorial:
 www.creativecommons.org Arduino Tutorial #16 - Mocho - Robot pulitore. Materiale utilizzato Arduino UNO - Motor Shield (2A Motor Shield) - motoriduttori - 2 ruote - sensore Sharp di distanza - struttura
www.creativecommons.org Arduino Tutorial #16 - Mocho - Robot pulitore. Materiale utilizzato Arduino UNO - Motor Shield (2A Motor Shield) - motoriduttori - 2 ruote - sensore Sharp di distanza - struttura
Far lampeggiare un led o forse un semaforo?
 Far lampeggiare un led o forse un semaforo? Lezione 1 di Arduino Grazie per le slide a Giacomo Magisano, Duilio Peroni, Michele Maffucci Il circuito Un circuito è un percorso chiuso fatto da conduttore
Far lampeggiare un led o forse un semaforo? Lezione 1 di Arduino Grazie per le slide a Giacomo Magisano, Duilio Peroni, Michele Maffucci Il circuito Un circuito è un percorso chiuso fatto da conduttore
Domotica con Arduino. Prima di proseguire con la descrizione del progetto, elenco, di seguito, il materiale utilizzato:
 Domotica con Arduino Questo progetto, che chiamo sinteticamente come da titolo, si occupa di gestire l accensione e lo spegnimento di elettrodomestici e illuminazione, attraverso una semplice interfaccia
Domotica con Arduino Questo progetto, che chiamo sinteticamente come da titolo, si occupa di gestire l accensione e lo spegnimento di elettrodomestici e illuminazione, attraverso una semplice interfaccia
Esercitazioni Corso Automazione a fluido ESERCITAZIONE N4
 ESERCITAZIONE N4 Realizzare lo schema pneumatico di figura 1 comandato mediante azionamento elettrico secondo lo schema di figura 2. In questo schema si realizza la sequenza D+/D-C+/D+/D- C-. Dello schema
ESERCITAZIONE N4 Realizzare lo schema pneumatico di figura 1 comandato mediante azionamento elettrico secondo lo schema di figura 2. In questo schema si realizza la sequenza D+/D-C+/D+/D- C-. Dello schema
IL RELÈ PROF. ANTONIO MARRAZZO
 Il relè, o relàis, è uno dei dispositivi elettromeccanici più conosciuti, spesso sono racchiusi dentro un involucro trasparente, che permette come nella foto di capirne subito il funzionamento. L avvolgimento
Il relè, o relàis, è uno dei dispositivi elettromeccanici più conosciuti, spesso sono racchiusi dentro un involucro trasparente, che permette come nella foto di capirne subito il funzionamento. L avvolgimento
CIRCUITO DI CONDIZIONAMENTO PER IL TRASDUTTORE DI TEMPERATURA AD590
 CIRCUITO DI CONDIZIONAMENTO PER IL ASDUTTORE DI TEMPERATURA AD590 Gruppo n 5 Urbini Andrea Marconi Simone Classe 5C 2001/2002 SPECIFICHE DEL PROGETTO: realizzare un circuito in grado di trasformare una
CIRCUITO DI CONDIZIONAMENTO PER IL ASDUTTORE DI TEMPERATURA AD590 Gruppo n 5 Urbini Andrea Marconi Simone Classe 5C 2001/2002 SPECIFICHE DEL PROGETTO: realizzare un circuito in grado di trasformare una
I.T.I. Modesto PANETTI B A R I. Area di progetto III ETB Anno scolastico INNAFFIATORE AUTOMATICO
 I.T.I. Modesto PANETTI B A R I Via Re David, 186-70125 BARI 080-542.54.12 - Fax 080-542.64.32 Intranet http://10.0.0.222 - Internet http://www.itispanetti.it email : BATF05000C@istruzione.it Area di progetto
I.T.I. Modesto PANETTI B A R I Via Re David, 186-70125 BARI 080-542.54.12 - Fax 080-542.64.32 Intranet http://10.0.0.222 - Internet http://www.itispanetti.it email : BATF05000C@istruzione.it Area di progetto
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5. PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
CORSO ARDUINO. Corso ASEV Giulio Fieramosca Stefano Panichi. Lezione 3 PWM e motori. Stefano Panichi e Giulio Fieramosca
 CORSO ARDUINO Giulio Fieramosca Stefano Panichi Corso ASEV 2015 Lezione 3 PWM e motori PWM modulazione a larghezza d'impulso Formule e Dati Ton = 1/3 del periodo Toff = 2/3 del periodo Duty Cycle = Ton
CORSO ARDUINO Giulio Fieramosca Stefano Panichi Corso ASEV 2015 Lezione 3 PWM e motori PWM modulazione a larghezza d'impulso Formule e Dati Ton = 1/3 del periodo Toff = 2/3 del periodo Duty Cycle = Ton
Corso di programmazione Arduino DI MALVEZZI DAVIDE
 Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche. Pietro Bonora Liceo Scientifico A.B.
 LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
8^ parte: Pilotare Motori passo-passo bipolari usando l integrato SN754410NE. Author: Ing. Sebastiano Giannitto (ITIS M.
 8^ parte: Pilotare Motori passo-passo bipolari usando l integrato SN754410NE Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 7 Lo scopo del progetto è riuscire a gestire un motore
8^ parte: Pilotare Motori passo-passo bipolari usando l integrato SN754410NE Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 7 Lo scopo del progetto è riuscire a gestire un motore
1. Il moto della sbarretta (OLIMPIADI della FISICA 1991)
") 1. Il moto della sbarretta (OLIMPIADI della FISICA 1991) Obiettivi Determinare la f.e.m. indotta agli estremi di un conduttore rettilineo in moto in un campo magnetico Applicare il secondo principio della
1. Il moto della sbarretta (OLIMPIADI della FISICA 1991) Obiettivi Determinare la f.e.m. indotta agli estremi di un conduttore rettilineo in moto in un campo magnetico Applicare il secondo principio della
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P Serie P Serie P Serie P Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Motori con Encoder 22 Azionamento Passo Passo 25 Codifica 26 Note
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Motori con Encoder 22 Azionamento Passo Passo 25 Codifica 26 Note
Introduzione alla programmazione
 Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
1. Tre fili conduttori rettilinei, paralleli e giacenti sullo stesso piano, A, B e C, sono percorsi da correnti di intensità ia = 2 A,
 ebbraio 1. L intensità di corrente elettrica che attraversa un circuito in cui è presente una resistenza R è di 4 A. Se nel circuito si inserisce una ulteriore resistenza di 2 Ω la corrente diventa di
ebbraio 1. L intensità di corrente elettrica che attraversa un circuito in cui è presente una resistenza R è di 4 A. Se nel circuito si inserisce una ulteriore resistenza di 2 Ω la corrente diventa di
Algoritmi e soluzione di problemi
 Algoritmi e soluzione di problemi Dato un problema devo trovare una soluzione. Esempi: effettuare una telefonata calcolare l area di un trapezio L algoritmo è la sequenza di operazioni (istruzioni, azioni)
Algoritmi e soluzione di problemi Dato un problema devo trovare una soluzione. Esempi: effettuare una telefonata calcolare l area di un trapezio L algoritmo è la sequenza di operazioni (istruzioni, azioni)
Classe III specializzazione elettronica. Sistemi automatici
 Macro unità n 1 Classe III specializzazione elettronica Sistemi automatici Reti elettriche Reti elettriche in regime continuo. Generatore, resistori, legge di Ohm. Resistenze in serie e parallelo. Partitore
Macro unità n 1 Classe III specializzazione elettronica Sistemi automatici Reti elettriche Reti elettriche in regime continuo. Generatore, resistori, legge di Ohm. Resistenze in serie e parallelo. Partitore
La corrente alternata
 La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
SEA Descrizione. Centralina Controllo Strip LED RGB
 Descrizione La centralina di controllo consente di pilotare Strip LED RGB o Bianchi fino ad un massimo di 10 Mt per Strip da 60 LED/mt o 20 Mt per Strip da 30 LED/Mt. La centralina puo essere configurata
Descrizione La centralina di controllo consente di pilotare Strip LED RGB o Bianchi fino ad un massimo di 10 Mt per Strip da 60 LED/mt o 20 Mt per Strip da 30 LED/Mt. La centralina puo essere configurata
CARATTERISTICHE TECNICHE dei QUADRI A6 per MONITORI ELETTRICI TELECOMANDATI
 CARATTERISTICHE TECNICHE dei QUADRI A6 per MONITORI ELETTRICI TELECOMANDATI Generalità I monitori telecomandati sono disponibili in un campo di portate idroschiuma da 50 a 30.000 lt/min. e questo è conseguentemente
CARATTERISTICHE TECNICHE dei QUADRI A6 per MONITORI ELETTRICI TELECOMANDATI Generalità I monitori telecomandati sono disponibili in un campo di portate idroschiuma da 50 a 30.000 lt/min. e questo è conseguentemente
CONVERTITORE LUCE-TENSIONE
 CONVERTITORE LUCE-TENSIONE OBIETTIVO: realizzazione di un circuito contenente una foto resistenza in grado di convertire le variazioni di luminosità in variazioni di tensione. COMPONENTI E MATERIALI: -
CONVERTITORE LUCE-TENSIONE OBIETTIVO: realizzazione di un circuito contenente una foto resistenza in grado di convertire le variazioni di luminosità in variazioni di tensione. COMPONENTI E MATERIALI: -
Convoglio Navetta. Alimentazione commutata, a seconda della direzione di marcia, dalla loco o rispettivamente dalla semipilota.
 Convoglio Navetta Alimentazione commutata, a seconda della direzione di marcia, dalla loco o rispettivamente dalla semipilota. Enrico Ferrari 28 novembre 2012 Enrico Ferrari Convoglio Navetta Pagina 1
Convoglio Navetta Alimentazione commutata, a seconda della direzione di marcia, dalla loco o rispettivamente dalla semipilota. Enrico Ferrari 28 novembre 2012 Enrico Ferrari Convoglio Navetta Pagina 1
Macchinina evita ostacoli Arduino
 Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Area FA AE Specifica tecnica STM015 Cliente: FA AE
 Area FA AE Specifica tecnica STM015 Cliente: FA AE Prodotto: FX3U / FR-D720 Test comunicazione RS485 PLC- Inverter con istruzioni dedicate Mod. FA_STM_00 Data: 02.04.09 Pag. 1/24 STM015.doc Rev. 00 Preparato
Area FA AE Specifica tecnica STM015 Cliente: FA AE Prodotto: FX3U / FR-D720 Test comunicazione RS485 PLC- Inverter con istruzioni dedicate Mod. FA_STM_00 Data: 02.04.09 Pag. 1/24 STM015.doc Rev. 00 Preparato
SCHEDA DRIVER 4 ASSI - 3,5 A
 MANUALE UTENTE SCHEDA DRIVER 4 ASSI - 3,5 A 1 MANUALE UTENTE 1. Descrizione Scheda basata sul chip TB6560AHQ della Toshiba, in grado di gestire fino a 4 motori passo-passo bipolari con corrente massima
MANUALE UTENTE SCHEDA DRIVER 4 ASSI - 3,5 A 1 MANUALE UTENTE 1. Descrizione Scheda basata sul chip TB6560AHQ della Toshiba, in grado di gestire fino a 4 motori passo-passo bipolari con corrente massima
Istruzioni di funzionamento. Barriere fotoelettriche OG. N. di disegno /05 09/2005
 Istruzioni di funzionamento R Barriere fotoelettriche OG N. di disegno 706/05 09/005 Utilizzo conforme all applicazione a barriera fotoelettrica rileva oggetti e materiali senza entrare in contatto con
Istruzioni di funzionamento R Barriere fotoelettriche OG N. di disegno 706/05 09/005 Utilizzo conforme all applicazione a barriera fotoelettrica rileva oggetti e materiali senza entrare in contatto con
Lez. 5 La Programmazione. Prof. Salvatore CUOMO
 Lez. 5 La Programmazione Prof. Salvatore CUOMO 1 2 Programma di utilità: Bootstrap All accensione dell elaboratore (Bootsrap), parte l esecuzione del BIOS (Basic Input Output System), un programma residente
Lez. 5 La Programmazione Prof. Salvatore CUOMO 1 2 Programma di utilità: Bootstrap All accensione dell elaboratore (Bootsrap), parte l esecuzione del BIOS (Basic Input Output System), un programma residente
Lo schema a blocchi del circuito integrato Timer 555 è il seguente:
 Il timer 555 è un circuito integrato progettato allo scopo di fornire impulsi di durata prestabilita. In pratica il timer 555 è un temporizzatore. Lo schema a blocchi del circuito integrato Timer 555 è
Il timer 555 è un circuito integrato progettato allo scopo di fornire impulsi di durata prestabilita. In pratica il timer 555 è un temporizzatore. Lo schema a blocchi del circuito integrato Timer 555 è
Modulo 1 Concetti di base della Tecnologia dell Informazione
 Modulo 1 Concetti di base della Tecnologia dell Informazione 1.0.1.1 1.0.1.2 1.0.1.3 Algoritmi Definizione di algoritmo e sua rappresentazione grafica Per algoritmo si intende un procedimento, che permette
Modulo 1 Concetti di base della Tecnologia dell Informazione 1.0.1.1 1.0.1.2 1.0.1.3 Algoritmi Definizione di algoritmo e sua rappresentazione grafica Per algoritmo si intende un procedimento, che permette
STRUMENTO ELETTRONICO DI PESATURA
 STRUMENTO ELETTRONICO DI PESATURA WST MANUALE D INSTALLAZIONE.Pag. 2 MANUALE OPERATIVO.Pag. 10 CODICE SOFTWARE: PWST01 VERSIONE: Rev.0.7 Alimentazione Assorbimento Isolamento Categoria d installazione
STRUMENTO ELETTRONICO DI PESATURA WST MANUALE D INSTALLAZIONE.Pag. 2 MANUALE OPERATIVO.Pag. 10 CODICE SOFTWARE: PWST01 VERSIONE: Rev.0.7 Alimentazione Assorbimento Isolamento Categoria d installazione
MST_K12_INV2 Regolatore di velocita per motori in CC con inversione automatica della rotazione
 MST_K12_INV2 Regolatore di velocita per motori in CC con inversione automatica della rotazione Manuale d uso e d installazione INTRODUZIONE Il progetto MST_K12_INV2 e un semplice regolatore di velocità
MST_K12_INV2 Regolatore di velocita per motori in CC con inversione automatica della rotazione Manuale d uso e d installazione INTRODUZIONE Il progetto MST_K12_INV2 e un semplice regolatore di velocità
DIP SWITCH 1-4 LED 2 LED 1. SW1 pulsante di programmazione SEQUENZA DI PROGRAMMAZIONE MODALITÀ FUNZIONAMENTO SCHEDA
 MODALITÀ FUNZIONAMENTO SCHEDA SWITCH 1-4 LED 2 LED 1 SW1 pulsante di programmazione Nota: questo è il modo in cui si vedono i con la morsettiera posizionata in alto. Quando il piccolo interruttore bianco
MODALITÀ FUNZIONAMENTO SCHEDA SWITCH 1-4 LED 2 LED 1 SW1 pulsante di programmazione Nota: questo è il modo in cui si vedono i con la morsettiera posizionata in alto. Quando il piccolo interruttore bianco
Introduzione ad Arduino Giuseppe Augiero
 Introduzione ad Arduino Giuseppe Augiero Arduino Arduino è una scheda elettronica di piccole dimensioni con un micro-controllore e circuiteria di contorno, utile per creare rapidamente prototipi e per
Introduzione ad Arduino Giuseppe Augiero Arduino Arduino è una scheda elettronica di piccole dimensioni con un micro-controllore e circuiteria di contorno, utile per creare rapidamente prototipi e per
Programmazione dei PLC in linguaggio Ladder
 Programmazione dei PLC in linguaggio Ladder Prima Parte ITI Alessandro Volta - Sassuolo Anno Scolastico 2009/2010 Linguaggio LADDER (linguaggio a contatti ) Introduzione e concetti fondamentali Il LADDER
Programmazione dei PLC in linguaggio Ladder Prima Parte ITI Alessandro Volta - Sassuolo Anno Scolastico 2009/2010 Linguaggio LADDER (linguaggio a contatti ) Introduzione e concetti fondamentali Il LADDER
PS600. Digital Visualizer. Guida Rapida Di Inizio
 PS600 Digital Visualizer Guida Rapida Di Inizio Italiano - 1 1. Contenuto del prodotto (10 componenti) PS600 Guida introduttiva Manuale utente & CD Cavo S-Video Cavo di alimentazione Cavo USB Cavo C-Video
PS600 Digital Visualizer Guida Rapida Di Inizio Italiano - 1 1. Contenuto del prodotto (10 componenti) PS600 Guida introduttiva Manuale utente & CD Cavo S-Video Cavo di alimentazione Cavo USB Cavo C-Video
Anno scolastico Materia Classe TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI
 Anno scolastico Materia Classe 2013-2014 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI 3 a 4 a B ITIS 1 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI... 2 2 Classe 3 a
Anno scolastico Materia Classe 2013-2014 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI 3 a 4 a B ITIS 1 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI... 2 2 Classe 3 a
I.P.S.I.A. Di BOCCHIGLIERO
 I.P.S.I.A. Di BOCCHIGLIRO a.s. 2012/2013 -classe V- Materia: Sistemi, automazione e organizzazione della produzione ---- rasduttori di velocità ---- alunno: prof. Ing. Zumpano Luigi Chindamo Michelangelo
I.P.S.I.A. Di BOCCHIGLIRO a.s. 2012/2013 -classe V- Materia: Sistemi, automazione e organizzazione della produzione ---- rasduttori di velocità ---- alunno: prof. Ing. Zumpano Luigi Chindamo Michelangelo
Modellistica dei Sistemi Elettro-Meccanici
 1 Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2016/17 Corso di Fondamenti di Automatica A.A. 2016/17 Modellistica dei Sistemi Elettro-Meccanici Prof. Carlo Cosentino Dipartimento di Medicina Sperimentale
1 Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2016/17 Corso di Fondamenti di Automatica A.A. 2016/17 Modellistica dei Sistemi Elettro-Meccanici Prof. Carlo Cosentino Dipartimento di Medicina Sperimentale
ISTITUTO TECNICO INDUSTRIALE STATALE P. HENSEMBERGER
 ISTITUTO TECNICO INDUSTRIALE STATALE P. HENSEMBERGER Via Berchet 2-20052 Monza Anno scolastico 2005/06 Classe 5B 2 Progetto: AUTOMAZIONE TRAMITE PLC DEL CARROPONTE ALIMENTATO A 12/24 V c.c. Docente responsabile
ISTITUTO TECNICO INDUSTRIALE STATALE P. HENSEMBERGER Via Berchet 2-20052 Monza Anno scolastico 2005/06 Classe 5B 2 Progetto: AUTOMAZIONE TRAMITE PLC DEL CARROPONTE ALIMENTATO A 12/24 V c.c. Docente responsabile
Controllo di una soglia analogica
 Controllo di una soglia analogica CONTROLLO DI UNA SOGLIA ANALOGICA Questo esempio mostra il procedimento di acquisizione di un ingresso analogico ed il controllo del segnale rispetto ad una soglia con
Controllo di una soglia analogica CONTROLLO DI UNA SOGLIA ANALOGICA Questo esempio mostra il procedimento di acquisizione di un ingresso analogico ed il controllo del segnale rispetto ad una soglia con
FONDAMENTI DI ARDUINO
 FONDAMENTI DI ARDUINO LEZIONE 1: LE BASI 8 novembre 2016 presso POLIFACTORY il makerspace del Politecnico di Milano PROGRAMMA DEL CORSO 8/11 Le basi, corrente elettrica, led, resistenze 10/11 Ingressi
FONDAMENTI DI ARDUINO LEZIONE 1: LE BASI 8 novembre 2016 presso POLIFACTORY il makerspace del Politecnico di Milano PROGRAMMA DEL CORSO 8/11 Le basi, corrente elettrica, led, resistenze 10/11 Ingressi
Impianto ITIS Einstein
 Impianto ITIS Einstein INDICE: Energie rinnovabili Funzionamento celle fotovoltaiche Pannello fotovoltaico Tipologie di impianti Descrizione del nostro impianto Energie Rinnovabili Sono da considerarsi
Impianto ITIS Einstein INDICE: Energie rinnovabili Funzionamento celle fotovoltaiche Pannello fotovoltaico Tipologie di impianti Descrizione del nostro impianto Energie Rinnovabili Sono da considerarsi
Sistema di Controllo Pannello Solare ad Inseguimento
 Sistema di Controllo Pannello Solare ad Inseguimento Descrizione Schemi Singole Basette: Basette di Controllo Ai due ingressi vengono collegate due fotoresistenze poste agli estremi opposti (per esempio
Sistema di Controllo Pannello Solare ad Inseguimento Descrizione Schemi Singole Basette: Basette di Controllo Ai due ingressi vengono collegate due fotoresistenze poste agli estremi opposti (per esempio
Programma di Robotica[LEGO EV3]
![Programma di Robotica[LEGO EV3]](/thumbs/39/19338690.jpg "Programma di Robotica[LEGO EV3]") Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
TECNOLOGIA, DISEGNO E PROGETTAZIONE STRUMENTI DI MISURA
 TECNOLOGIA, DISEGNO E PROGETTAZIONE STRUMENTI DI MISURA CLASSIFICAZIONE DEGLI STRUMENTI TIPO DI IMPIEGO Strumenti da quadro Strumenti da laboratorio Strumenti portatili. PRINCIPIO DI FUNZIONAMENTO Elettronici
TECNOLOGIA, DISEGNO E PROGETTAZIONE STRUMENTI DI MISURA CLASSIFICAZIONE DEGLI STRUMENTI TIPO DI IMPIEGO Strumenti da quadro Strumenti da laboratorio Strumenti portatili. PRINCIPIO DI FUNZIONAMENTO Elettronici
ITIS «GUGLIELMO MARCONI» - VERONA. Programma (piano di lavoro) preventivo. Anno Scolastico 2015/16. Materia: SCIENZE E TECNOLOGIE APPLICATE
 preventivo. Anno Scolastico 2015/16. Materia: SCIENZE E TECNOLOGIE APPLICATE") ITIS «GUGLIELMO MARCONI» - VERONA Programma (piano di lavoro) preventivo Anno Scolastico 2015/16 Materia: SCIENZE E TECNOLOGIE APPLICATE Classe 2^DE Docenti GIOVANNI LUCA SEBASTIANO MANCUSO, IVO TAMBURINI
ITIS «GUGLIELMO MARCONI» - VERONA Programma (piano di lavoro) preventivo Anno Scolastico 2015/16 Materia: SCIENZE E TECNOLOGIE APPLICATE Classe 2^DE Docenti GIOVANNI LUCA SEBASTIANO MANCUSO, IVO TAMBURINI
CORSO ARDUINO. Jacopo Belli Giulio Fieramosca Luca Mattii GOLEM Jacopo Belli Giulio Fieramosca Luca Mattii
 CORSO ARDUINO Jacopo Belli Giulio Fieramosca Luca Mattii GOLEM 2016 1 FAQ time domande e risposte? 2 Iterazioni: while Si usa per ripetere un blocco di codice finché una condizione è vera, ma senza tenere
CORSO ARDUINO Jacopo Belli Giulio Fieramosca Luca Mattii GOLEM 2016 1 FAQ time domande e risposte? 2 Iterazioni: while Si usa per ripetere un blocco di codice finché una condizione è vera, ma senza tenere
Guida all assemblaggio e al testing del modulo LNPC
 Guida all assemblaggio e al testing del modulo LNPC Versione guida 1.0 Il kit contiene sia il circuito stampato che tutti i componenti necessari per assemblare il modulo. www.dccworld.com 1 L assemblaggio
Guida all assemblaggio e al testing del modulo LNPC Versione guida 1.0 Il kit contiene sia il circuito stampato che tutti i componenti necessari per assemblare il modulo. www.dccworld.com 1 L assemblaggio
Dalla tabella alla funzione canonica
 Dalla tabella alla funzione canonica La funzione canonica è la funzione logica associata alla tabella di verità del circuito che si vuole progettare. Essa è costituita da una somma di MinTerm con variabili
Dalla tabella alla funzione canonica La funzione canonica è la funzione logica associata alla tabella di verità del circuito che si vuole progettare. Essa è costituita da una somma di MinTerm con variabili
EEPROM SERIALI IN I2C BUS.
 Corso di BASCOM 8051 - (Capitolo 3 0 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. EEPROM SERIALI IN I2C BUS. Tra i dispositivi più utilizzati, nelle applicazioni
Corso di BASCOM 8051 - (Capitolo 3 0 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. EEPROM SERIALI IN I2C BUS. Tra i dispositivi più utilizzati, nelle applicazioni
SIMBOLO ELETTRICO. K1 contatti. bobina RELÈ
 DEFINIZIONE È un apparecchio di comando con uno o più contatti elettrici che vengono azionati per mezzo di un elettromagnete quando la bobina dello stesso viene percorsa da corrente ( eccitata ). SIMBOLO
DEFINIZIONE È un apparecchio di comando con uno o più contatti elettrici che vengono azionati per mezzo di un elettromagnete quando la bobina dello stesso viene percorsa da corrente ( eccitata ). SIMBOLO
RELAZIONE DI TELECOMUNICAZIONI ITIS Vobarno Titolo: I Transistor
 RLAZION DI TLCOMUNICAZIONI ITIS Vobarno Titolo: I Transistor Nome: Samuele Sandrini 4AT 05/10/14 Un transistor a giunzione bipolare (BJT Bipolar Junction Transistor) è formato da tre zone di semiconduttore
RLAZION DI TLCOMUNICAZIONI ITIS Vobarno Titolo: I Transistor Nome: Samuele Sandrini 4AT 05/10/14 Un transistor a giunzione bipolare (BJT Bipolar Junction Transistor) è formato da tre zone di semiconduttore
I SENSORI DI PROSSIMITA
 I SENSORI DI PROSSIMITA In questa lezione su Arduino, parleremo di un interessante trasduttore, che può essere utile per tantissimi progetti: il sensore di presenza o di prossimità I sensori di prossimità
I SENSORI DI PROSSIMITA In questa lezione su Arduino, parleremo di un interessante trasduttore, che può essere utile per tantissimi progetti: il sensore di presenza o di prossimità I sensori di prossimità
Competenze di ambito Prerequisiti Abilità / Capacità Conoscenze Livelli di competenza
 Docente: LASEN SERGIO Classe: 3MAT Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE_STRUTTURA E COMPONENTI Saper effettuare
Docente: LASEN SERGIO Classe: 3MAT Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE_STRUTTURA E COMPONENTI Saper effettuare
A1.2 - Utilizzare programmi applicativi per il monitoraggio ed il collaudo di sistemi elettronici.
 Programma effettivamente svolto Sez.D COMPETENZE (da linee guida DPR 15/03/2010, art. 8 comma 3 e direttiva 4 del 16 gennaio 2012) K1 - utilizzare la strumentazione di laboratorio e di settore e applicare
Programma effettivamente svolto Sez.D COMPETENZE (da linee guida DPR 15/03/2010, art. 8 comma 3 e direttiva 4 del 16 gennaio 2012) K1 - utilizzare la strumentazione di laboratorio e di settore e applicare
CN03P. Manuale d uso Controller per motori Passo Passo Ver. 1.5 del 6 giugno 07 Connessione Centronics
 CN03P Manuale d uso Controller per motori Passo Passo Ver. 1.5 del 6 giugno 07 Connessione Centronics Pagina 1 Introduzione: 3 Caratteristiche tecniche : 3 Montaggi: 4 Alimentazione 4 Motori Passo Passo
CN03P Manuale d uso Controller per motori Passo Passo Ver. 1.5 del 6 giugno 07 Connessione Centronics Pagina 1 Introduzione: 3 Caratteristiche tecniche : 3 Montaggi: 4 Alimentazione 4 Motori Passo Passo
Vettori paralleli e complanari
 Vettori paralleli e complanari Lezione n 9 1 (Composizione di vettori paralleli e complanari) Continuando lo studio delle grandezze vettoriali in questa lezione ci interesseremo ancora di vettori. In particolare
Vettori paralleli e complanari Lezione n 9 1 (Composizione di vettori paralleli e complanari) Continuando lo studio delle grandezze vettoriali in questa lezione ci interesseremo ancora di vettori. In particolare
IST-1395.CS01.01/A CE395CS / Istruzioni d uso Pag. 2/6
 IT IST-1395.CS01.01/A File: IST-1395.CS01.01-A_CE395CS-IT_Convertitore RS232-RS422.docx CONVERTITORE SERIALE RS232-RS485 CE395CS ISTRUZIONI D USO TECNOCONTROL S.r.l. Via Miglioli, 4720090 SEGRATE (MI)
IT IST-1395.CS01.01/A File: IST-1395.CS01.01-A_CE395CS-IT_Convertitore RS232-RS422.docx CONVERTITORE SERIALE RS232-RS485 CE395CS ISTRUZIONI D USO TECNOCONTROL S.r.l. Via Miglioli, 4720090 SEGRATE (MI)
Istruzioni di funzionamento Sistema a riflessione diretta OG
 Istruzioni di funzionamento R Sistema a riflessione diretta OG N. di disegno 7065/05 09/05 Utilizzo conforme all applicazioneil sistema a riflessione diretta rileva oggetti e materiali senza entrare in
Istruzioni di funzionamento R Sistema a riflessione diretta OG N. di disegno 7065/05 09/05 Utilizzo conforme all applicazioneil sistema a riflessione diretta rileva oggetti e materiali senza entrare in
Regolatore di velocità per motori DC SPEEDREGULATOR 1/8
 Regolatore di velocità per motori DC DC DCSPEED SPEEDREGULATOR REGULATOR 1/8 Descrizione La DC_SPEED_REG permette la regolazione della velocità di un motore in corrente continua a spazzole oppure ad induzione
Regolatore di velocità per motori DC DC DCSPEED SPEEDREGULATOR REGULATOR 1/8 Descrizione La DC_SPEED_REG permette la regolazione della velocità di un motore in corrente continua a spazzole oppure ad induzione
METODI DI RISOLUZIONE DEI SEGNALI BLOCCANTI. Prof. Mario Angelo Giordano
 METODI DI RISOLUZIONE DEI SEGNALI BLOCCANTI Prof. Mario Angelo Giordano Ipotizziamo ora di considerare la sequenza costituita da due cilindri A e B, entrambi DE: A+/B+/B-/A- E ipotizziamo che tale sequenza
METODI DI RISOLUZIONE DEI SEGNALI BLOCCANTI Prof. Mario Angelo Giordano Ipotizziamo ora di considerare la sequenza costituita da due cilindri A e B, entrambi DE: A+/B+/B-/A- E ipotizziamo che tale sequenza
Arduino Tutorial #7 - Nunchuk materiale utilizzato Arduino, cavi elettrici, breadboard, nunchuk, 3 led.
 www.creativecommons.org Arduino Tutorial #7 - Nunchuk materiale utilizzato Arduino, cavi elettrici, breadboard, nunchuk, 3 led. Per vedere tutti i tutorial: /arduino/ In questo tutorial colleghiamo il
www.creativecommons.org Arduino Tutorial #7 - Nunchuk materiale utilizzato Arduino, cavi elettrici, breadboard, nunchuk, 3 led. Per vedere tutti i tutorial: /arduino/ In questo tutorial colleghiamo il
Relè di alimentazione SPST,10 Pezzi,DC 5V Bobina 7A 240VAC 10A 125VAC/28VDC 5 pin JQC-3F
 Il relè è un dispositivo elettromeccanico costituito da un avvolgimento e da uno o più contatti meccanici, è utilizzato per operazione di interruzione e commutazione di circuiti elettrici. Normalmente
Il relè è un dispositivo elettromeccanico costituito da un avvolgimento e da uno o più contatti meccanici, è utilizzato per operazione di interruzione e commutazione di circuiti elettrici. Normalmente
Moduli logici. Interfacciamento di dispositivi logici. Parametri statici e dinamici. Circuiti logici combinatori Circuiti logici sequenziali
 Moduli logici Moduli logici Interfacciamento di dispositivi logici Parametri statici e dinamici Circuiti logici combinatori Circuiti logici sequenziali Registri, contatori e circuiti sequenziali Esempi
Moduli logici Moduli logici Interfacciamento di dispositivi logici Parametri statici e dinamici Circuiti logici combinatori Circuiti logici sequenziali Registri, contatori e circuiti sequenziali Esempi
BREVE GUIDA ALL'USO DEL TESTER
 BREVE GUIDA ALL'USO DEL TESTER Un tester digitale sufficientemente preciso per uso hobbistico si può acquistare oramai con pochi spiccioli: considerata l'utilità dello strumento, è un vero peccato non
BREVE GUIDA ALL'USO DEL TESTER Un tester digitale sufficientemente preciso per uso hobbistico si può acquistare oramai con pochi spiccioli: considerata l'utilità dello strumento, è un vero peccato non
M12 - Motori passo-passo.
 M12 - Motori passo-passo. I motori passo-passo convertono direttamente un'informazione numerica, costituita da impulsi elettrici di comando, in uno spostamento incrementale, costituito da un numero equivalente
M12 - Motori passo-passo. I motori passo-passo convertono direttamente un'informazione numerica, costituita da impulsi elettrici di comando, in uno spostamento incrementale, costituito da un numero equivalente
RELAZIONE DI TELECOMUNICAZIONI - ITIS Vobarno. Parte prima
 RELAZIONE DI TELECOMUNICAZIONI - ITIS Vobarno Nome: Fabio Castellini Gruppo n. 4 Data 17/10/13 TITOLO: Porta logica OR. Parte prima OBIETTIVO: Creare un circuito su breadboard, che ci permetta di verificare
RELAZIONE DI TELECOMUNICAZIONI - ITIS Vobarno Nome: Fabio Castellini Gruppo n. 4 Data 17/10/13 TITOLO: Porta logica OR. Parte prima OBIETTIVO: Creare un circuito su breadboard, che ci permetta di verificare
MOTORI IN CORRENTE CONTINUA (C.C.) Comprendere come si genera energia meccanica di rotazione a partire da una corrente continua
 Comprendere come si genera energia meccanica di rotazione a partire da una corrente continua") MOTORI IN CORRENTE CONTINUA (C.C.) Comprendere come si genera energia meccanica di rotazione a partire da una corrente continua Ing. Antonio Coppola 2 Motore CC Il motore in corrente continua a magnete
MOTORI IN CORRENTE CONTINUA (C.C.) Comprendere come si genera energia meccanica di rotazione a partire da una corrente continua Ing. Antonio Coppola 2 Motore CC Il motore in corrente continua a magnete
Esperienze di spettrofotometria per la scuola, con arduino
 Esperienze di spettrofotometria per la scuola, con arduino Andrea Canesi (1), Daniele Grosso (2) 1. Ministero della Pubblica Istruzione Liceo Classico e Linguistico C. Colombo, Genova 2. Università di
Esperienze di spettrofotometria per la scuola, con arduino Andrea Canesi (1), Daniele Grosso (2) 1. Ministero della Pubblica Istruzione Liceo Classico e Linguistico C. Colombo, Genova 2. Università di
Sensori di Posizione e Velocità
 Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
INTRODUZIONE ALLE LOGICHE PROGRAMMABILI
 INTRODUZIONE ALLE LOGICHE PROGRAMMABILI TEMA: L DESCRIZIONE: Introduzione al linguaggio VHDL per la descrizione dell hardware e sintesi di un circuito logico. LUOGO: Laboratori Nazionali di Legnaro (PD)
INTRODUZIONE ALLE LOGICHE PROGRAMMABILI TEMA: L DESCRIZIONE: Introduzione al linguaggio VHDL per la descrizione dell hardware e sintesi di un circuito logico. LUOGO: Laboratori Nazionali di Legnaro (PD)
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo
 Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" - ALBA (CN) ANNO SCOLASTICO 2015/2016
 ANNO SCOLASTICO 2015/2016") ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" - ALBA (CN) ANNO SCOLASTICO 2015/2016 CLASSE: 3 I articolazione Automazioni ITI indirizzo Elettronica ed Elettrotecnica Disciplina: Tecnologia e Progettazione
ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" - ALBA (CN) ANNO SCOLASTICO 2015/2016 CLASSE: 3 I articolazione Automazioni ITI indirizzo Elettronica ed Elettrotecnica Disciplina: Tecnologia e Progettazione
Scheda tecnica. Sonda lambda. Informazioni generali. Modo di funzionamento
 1 Hella s.p.a. Milano 13 Settembre 2005 Sonda lambda 1-5 Sonda lambda Informazioni generali A causa dell'inasprimento delle normative sui gas di scarico, l'industria automobilistica ha dovuto ridurre ulteriormente
1 Hella s.p.a. Milano 13 Settembre 2005 Sonda lambda 1-5 Sonda lambda Informazioni generali A causa dell'inasprimento delle normative sui gas di scarico, l'industria automobilistica ha dovuto ridurre ulteriormente
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi)
") IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
Laboratorio misure elettroniche ed elettriche: regolatori di tensione a tiristori
 Laboratorio misure elettroniche ed elettriche: regolatori di tensione a tiristori Circuiti di accensione per tiristori (Tavole E.1.1 - E.1.2) Considerazioni teoriche Per le debite considerazioni si fa
Laboratorio misure elettroniche ed elettriche: regolatori di tensione a tiristori Circuiti di accensione per tiristori (Tavole E.1.1 - E.1.2) Considerazioni teoriche Per le debite considerazioni si fa
COLLEGAMENTI ELETTRICI
 CAPITOLO 6 COLLEGAMENTI ELETTRICI A seconda della configurazione dell impianto, della potenza e della tensione dei pannelli, occorre opportunamente collegare tra loro i pannelli in modo da adattarli alle
CAPITOLO 6 COLLEGAMENTI ELETTRICI A seconda della configurazione dell impianto, della potenza e della tensione dei pannelli, occorre opportunamente collegare tra loro i pannelli in modo da adattarli alle
REGOLATORE TRIFASE IN CORRENTE ALTERNATA MODELLO: AZSC-97
 REGOLATORE TRIFASE IN CORRENTE ALTERNATA MODELLO: AZSC-97 1 INDICE 1. DESCRIZIONE DEL PRODOTTO... 4 2. COLLEGAMENTO INGRESSO REGOLAZIONE E RETROAZIONE...6 2.1.Collegamento in tensione con potenziometro.......6
REGOLATORE TRIFASE IN CORRENTE ALTERNATA MODELLO: AZSC-97 1 INDICE 1. DESCRIZIONE DEL PRODOTTO... 4 2. COLLEGAMENTO INGRESSO REGOLAZIONE E RETROAZIONE...6 2.1.Collegamento in tensione con potenziometro.......6
PS400. Digital Visualizer. Guida Rapida Di Inizio
 PS400 Digital Visualizer Guida Rapida Di Inizio Italiano - 1 1. Contenuto del prodotto (9 componenti) PS400 Guida introduttiva Manuale utente Download Card Cavo di alimentazione Cavo USB Cavo C-Video Cavo
PS400 Digital Visualizer Guida Rapida Di Inizio Italiano - 1 1. Contenuto del prodotto (9 componenti) PS400 Guida introduttiva Manuale utente Download Card Cavo di alimentazione Cavo USB Cavo C-Video Cavo
GENERATORI MECCANICI DI CORRENTE
 GENERATORI MECCANICI DI CORRENTE IL MAGNETISMO Il termine deriva da un minerale del ferro: la magnetite (o calamita naturale), che ha la proprietà di attrarre alcuni metalli. Il campo magnetico è lo spazio
GENERATORI MECCANICI DI CORRENTE IL MAGNETISMO Il termine deriva da un minerale del ferro: la magnetite (o calamita naturale), che ha la proprietà di attrarre alcuni metalli. Il campo magnetico è lo spazio
KA01. Shield RGB per Arduino. Permette di pilotare in PWM strip luminosi a LED (1 x RGB, 3 x monocromatici) mediante Arduino.
 mediante Arduino.") KA01 ISTRUZIONI DI MONTAGGIO HKA01IP 1 Shield RGB per Arduino Permette di pilotare in PWM strip luminosi a LED (1 x RGB, x monocromatici) mediante Arduino. Caratteristiche Compatibile con Arduino Due TM,
KA01 ISTRUZIONI DI MONTAGGIO HKA01IP 1 Shield RGB per Arduino Permette di pilotare in PWM strip luminosi a LED (1 x RGB, x monocromatici) mediante Arduino. Caratteristiche Compatibile con Arduino Due TM,
Informatica ALGORITMI E LINGUAGGI DI PROGRAMMAZIONE. Francesco Tura. F. Tura
 Informatica ALGORITMI E LINGUAGGI DI PROGRAMMAZIONE Francesco Tura francesco.tura@unibo.it 1 Lo strumento dell informatico: ELABORATORE ELETTRONICO [= calcolatore = computer] Macchina multifunzionale Macchina
Informatica ALGORITMI E LINGUAGGI DI PROGRAMMAZIONE Francesco Tura francesco.tura@unibo.it 1 Lo strumento dell informatico: ELABORATORE ELETTRONICO [= calcolatore = computer] Macchina multifunzionale Macchina
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Applicazioni dei microcontrollori PIC
 Applicazioni dei microcontrollori PIC In questa unità vengono esposte le modalità di realizzazione di un circuito hardware con il microcontroller PIC16C84 (o PIC16F84), per la prova dei programmi presentati
Applicazioni dei microcontrollori PIC In questa unità vengono esposte le modalità di realizzazione di un circuito hardware con il microcontroller PIC16C84 (o PIC16F84), per la prova dei programmi presentati
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 51-56025 PONTEDERA (PI)
") ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: 5AE DISCIPLINA: Sistemi Automatici - pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE A.S. 2014/2015 - CLASSE: 5AE DISCIPLINA: 5AE
ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: 5AE DISCIPLINA: Sistemi Automatici - pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE A.S. 2014/2015 - CLASSE: 5AE DISCIPLINA: 5AE
Istruzioni di funzionamento
 Istruzioni di funzionamento R Sistema reflex OG N. di disegno 706/05 09/05 Utilizzo conforme all applicazione Il sistema reflex, operando unitamente al catarifrangente a "nido d'ape" o al film adesivo
Istruzioni di funzionamento R Sistema reflex OG N. di disegno 706/05 09/05 Utilizzo conforme all applicazione Il sistema reflex, operando unitamente al catarifrangente a "nido d'ape" o al film adesivo
Real Time Clock, in I2C BUS, Provvisto di RAM.
 Corso di BASCOM 8051 - (Capitolo 4 1 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. Real Time Clock, in I2C BUS, Provvisto di RAM. Il PCF 8583 è un diffusissimo dispositivo
Corso di BASCOM 8051 - (Capitolo 4 1 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. Real Time Clock, in I2C BUS, Provvisto di RAM. Il PCF 8583 è un diffusissimo dispositivo
ELETTROTECNICA. Elettromagnetismo. Livello 13. Andrea Ros sdb
 ELETTROTECNICA Livello 13 Elettromagnetismo Andrea Ros sdb Livello 13 Elettromagnetismo Sezione 1 Campi magnetici e correnti elettriche Nel 1820 il fisico Oersted scoprì che il passaggio di una corrente
ELETTROTECNICA Livello 13 Elettromagnetismo Andrea Ros sdb Livello 13 Elettromagnetismo Sezione 1 Campi magnetici e correnti elettriche Nel 1820 il fisico Oersted scoprì che il passaggio di una corrente
VFO esterno universale con Arduino
 VFO esterno universale con Arduino di Enrico Guindani, IZ2NXF L IDEA Controllare il proprio ricetrasmettitore via computer attraverso un apposito software è pratica sempre più diffusa tra gli OM. La possibilità
VFO esterno universale con Arduino di Enrico Guindani, IZ2NXF L IDEA Controllare il proprio ricetrasmettitore via computer attraverso un apposito software è pratica sempre più diffusa tra gli OM. La possibilità