Calcolatori Elettronici A a.a. 2008/2009
|
|
|
- Angelo Barbieri
- 8 anni fa
- Просмотров:
Транскрипт
1 Calcolatori Elettronici A a.a. 28/29 CPU multiciclo Massimiliano Giacomin
2 Esempi di processori che usano controllo a singolo ciclo: NESSUNO! Perché? Periodo di clock: abbastanza lungo per garantire la stabilità dei segnali attraverso il percorso più lungo tempo di esecuz. costante per diverse istruz. Istruzioni più lente limitano le istruzioni più veloci! Es. lw Memoria Istruz. Reg. File A L U Memoria Dati Reg. File Es. Tipo-R Memoria Istruz. Reg. File A L U Reg. File 2
3 Limitazione aggravata da - istruzioni che utilizzano decine di unità funzionali in serie, ad esempio comprendenti calcoli in virgola mobile! CPI =, ma T clock alto, ovvero frequenza di clock molto bassa! Nel complesso, il tempo di esecuzione di una istruzione è sempre pari al caso peggiore, ovvero a quello dell istruzione più complessa e lunga Altro svantaggio: duplicazione dell HW costi elevati! Nell esempio del MIPS, come visto: - occorrono due memorie diverse [dati e istruzioni] [NB: questo va comunque bene perché negli attuali calcolatori si usa memoria cache + pipeline] - occorrono tre ALU, una per istruzioni aritmetiche confronto operandi in beq calcolo indirizzo lw e sw, una per calcolare PC+4 ed una per calcolare indirizzo di salto beq [la cosa si complica considerando modalità di indirizzamento complesse, ad esempio quelle con autoincremento, o operazioni in virgola mobile] 3
4 Una strategia alternativa T istruzione costante e pari a T medio di esecuzione per istruzione lunga potenzialmente breve Suddividere le istruzioni in fasi : un ciclo di clock per una fase! T esecuzione T 2 esecuzione NB: T 2 esecuzione (il caso peggiore) può in generale essere maggiore del precedente! Tuttavia, le istruzioni più lunghe sono anche meno frequenti: principio rendere più veloce l evento più frequente comporta un guadagno! 4
5 Processore multiciclo Ogni istruzione divisa in fasi Ad ogni ciclo di clock una fase: controllo sequenziale E possibile utilizzare una stessa unità funzionale più volte nel corso di una istruzione: - unica memoria per istruzioni e dati - una sola ALU, che svolge le funzioni logico aritmetiche delle istruzioni di Tipo-R e beq (per confrontare rs e rt), somma PC+4 (per fetch), somma per calcolare indirizzi nei salti condizionati (beq) e nelle istruzioni lw e sw Necessità di memorizzare risultati intermedi in registri temporanei (non visibili al programmatore): - registri temporanei: salvano dati prodotti in un ciclo di clock e utilizzati dalla stessa istruzione in un ciclo di clock successivo - registri visibili al prog: dati utilizzati da istruzioni successive 5
6 Come visto, ciascuna fase deve essere sufficientemente breve (T clock breve) Bilanciare la suddivisione in fasi, evitare di mettere in serie più unità funzionali lente. Faremo in modo di non mettere in serie più di una delle operazioni: - accesso in memoria (istruzioni o dati) - accesso al register file (due letture e una scrittura) - operazioni della ALU (NB: accesso/scrittura in un registro singolo considerato non oneroso) Ciascuna di queste unità [memoria, register file, ALU] necessita di registri temporanei per memorizzarne il risultato. Sono inoltre necessari multiplexer aggiuntivi per instradare i dati verso le unità funzionali riutilizzate nella stessa istruzione [p.es. MUX per selezionare indirizzo memoria tra PC (per fetch) o uscita ALU (per lw o sw) ] Esistono diverse modalità di specifica e realizzazione del controllo 6
7 Specifica progressiva del datapath Di seguito sono schematizzate le attività che una macchina multiciclo svolge per eseguire le istruzioni del set del MIPS ridotto: le fasi rispettano i vincoli posti in precedenza sulle operazioni che si possono eseguire in serie. Nello specificare le diverse attività di calcolo si sono seguite le convenzioni adottate nel testo. In particolare, sono rese visibili le risorse impegnate nel ciclo in esame. La combinazione delle immagini risulta nello schema 5-28 del testo. 7
8 I ciclo:prelievo dell istruzione I ciclo: IR memoria [PC] ottimistiche: PC PC + 4 PCWrite IorD = MemRead IRWrite AluSrcA = P C indirizzo Memoria Dato scritto MemData Istruzioni [3-26] [25-2] [2-6] [5-] RegWrite scritto Dato scritto Registri letto Regist ro letto Registr o Dato letto Dato letto 2 4 A L U AluCom zero ris [indicati i valori affermati e controlli MUX rilevanti] AluSrcB = UC ALU AluOp= [addizione] 8
9 NB: Durante il primo ciclo di clock vengono creati i due percorsi paralleli: PC_out Memoria IR PC_out ALU PC_in + vengono attivati i segnali di scrittura in IR e PC Alla fine del periodo di clock (fronte del clock): PC e IR vengono scritti; i valori sono disponibili nel ciclo di clock successivo Durante il secondo ciclo di clock IR contiene l istruzione da eseguire, PC è già stato incrementato NB: si noti che ciascun percorso contiene soltanto un elemento critico (memoria e ALU); sorgente e destinazione infatti sono registri singoli (PC e IR) 9
10 II ciclo:decodifica e caricamento registri ottimistiche: alimentazione registri: A registro[ir[25-2]]; B registro[ir[2-6]] calcolo indirizzo branch: AluOut PC + (sign_ext(ir[5-]) << 2) Al controllo per decodifica AluSrcA = P C Memoria Istruzioni [25-2] [2-6] [5-] Nota: non si conosce l istruzione in questo passo: tutte le operazioni ottimistiche! Nota: A,B Aluout non sono controllati (memorizzano il valore ad ogni fronte del CK) [3-26] letto A Dato A letto letto scritto Dato scritto Est. segno Registri Dato letto 2 B Shift << AluSrcB=3 L U UC ALU AluCom zero ris Alu Out AluOp= [addizione]
11 NB: si è detto che nel secondo ciclo è già disponibile l istruzione in IR. D altra parte si dice anche che non si conosce quale sia l istruzione e quindi si effettua la decodifica + le uniche operazioni svolte sono ottimistiche Ciò perché si usa il modello di Moore: uscite del sistema di controllo dipendono solo dallo stato corrente, non dagli ingressi [IR]. FETCH Uscita: - carica IR - PC + 4 Unica transizione possibile! Questa è la decodifica DECODE Uscita: - ottimistiche Transizione dipende da IR! III ciclo caso III ciclo caso 2 Uscita:
12 III ciclo:se è branch (beq) IF ([A]= = [B]): PC [AluOut] Attenzione: si ritocca il data path e si introduce PCsource PCWrite = AluSrcA = PCsource= PCWriteCond P C Memoria Istruzioni Registri A questo punto istruzione terminata! (si ricomincia dal primo ciclo prox istruzione) letto letto scritto Dato scritto Dato letto Dato letto 2 A B Shift << AluSrtcB= A L U UC ALU AluCom ris zero Alu Out AluOp= [sottrazione] 2
13 PCWrite III ciclo: se è salto incondizionato (jump) PC PC[3-28] (IR[25-]<<) PCsource = 2 PC[3-28] 44 2 P C indirizzo Memoria Dato scritto MemData Istruzioni [3-26] [25-2] [2-6] [5-] IR[25-] 26 Shift << 2 28 Registri 4 32 A L U ris AluCom Alu Out A questo punto l istruzione è terminata! (si ricomincia dal primo ciclo prossima istruzione) UC ALU 3
14 III ciclo:per tipo R AluOut A op B AluSrcA= P C Memoria Istruzioni [3-26] [2-6] [5-] Registri A B 4 A L U AluCom ris zero Alu Out IR[5-] Shift << 2 AluSrcB= UC ALU AluOp= [op in base a funct] 4
15 IV ciclo: completamento istruzioni R Reg [IR[5-]] Aluout RegDst= RegWrite P C Memoria o MemData Dato scritto MDR Istruzioni [3-26] [25-2] [2-6] [5-] IR[5-] letto letto scritto Dato scritto Registri Dato letto Dato letto 2 A B 4 A L U UC ALU zero ris Alu Out MemToReg = A questo punto l istruzione è terminata! 5
16 III ciclo:per tipo accesso a memoria AluOut [A]+ (signext([ir[5-]]) AluSrcA= P C Memoria Istruzioni [3-26] [2-6] [5-] Registri A B A L U AluCom ris zero Alu Out SignExt Shift << 2 UC ALU AluOp= [addizione] AluSrcB= 6
17 IV ciclo: carica parola (lw) MDR memoria [AluOut] IorD= MemRead P C indirizzo Memoria Dato scritto MemData 32 Istruzioni [3-26] [25-2] [2-6] [5-] letto letto scritto Dato scritto Registri Dato letto Dato letto 2 A B 4 A L U zero ris Alu Out MDR UC ALU 7
18 V ciclo: completamento lettura da memoria (lw) Reg [IR[2-6]] MDR RegDst= RegWrite P C Memoria o MemData Dato scritto MDR Istruzioni [3-26] [25-2] [2-6] [5-] letto letto scritto Dato scritto Registri Dato letto Dato letto 2 A B 4 A L U UC ALU zero ris Alu Out A questo punto istruzione terminata! MemToReg= 8
19 IV ciclo: memorizza parola (sw) memoria [AluOut] B (NB: B è stato letto due volte ) IorD= MemWrite P C indirizzo Memoria Dato scritto MemData 32 Istruzioni [3-26] [25-2] [2-6] [5-] letto letto scritto Dato scritto Registri Dato letto Dato letto 2 A B 4 A L U zero ris Alu Out MDR UC ALU A questo punto l istruzione è terminata! 9
20 Da queste considerazioni risultano immediatamente: unità di elaborazione (datapath) specifica dell unità di controllo PC M u x Address Write data Memory MemData Instruction [3-26] Instruction [25 2] Instruction [2 6] Instruction [5 ] Instruction register Instruction [5 ] Memory data register PCWriteCond PCWrite IorD MemRead MemWrite MemtoReg Outputs Control ALUOp ALUSrcB ALUSrcA RegWrite IRWrite Instruction [25 ] Op [5 ] M Instructionu [5 ] x M u x PCSource RegDst 6 Read register Read register 2 Registers Write register Write data Sign extend Read data Read data 2 32 Shift left 2 A B 4 M u x M u 2 x Shift left 2 ALU control PC [3-28] Zero ALU ALU result Jump address [3-] ALUOut 2 M u x Instruction [5 ] 2
21 Soluzione alternativa (permette di risparmiare connessioni): bus condiviso interno alla CPU read write read write read write Permette di risparmiare delle linee di dato, ma comporta una riduzione delle prestazioni, perché un bus è meno veloce di una connessione punto-punto Nel seguito, non considereremo questa soluzione (si parla di bus interno alla CPU!) 2
22 Specifica dell unità di controllo: ) Come macchina a stati finiti (Modello di Moore) 2) Come microprogramma Partiamo dalla prima modalità, ottenendo direttamente il diagramma a stati Ad ogni stato sono associate le uscite corrispondenti (cfr. lucidi precedenti): segnali di scrittura/lettura: non indicati segnali di controllo MUX: non indicati valore indifferente 22
23 2 Memory address computation ALUSrcA = ALUSrcB = ALUOp = Start Instruction fetch MemRead ALUSrcA = IorD = IRWrite ALUSrcB = ALUOp = PCWrite PCSource = 6 (Op = 'LW') or (Op = 'SW') Execution ALUSrcA = ALUSrcB = ALUOp= 8 (Op = R-type) Branch completion ALUSrcA = ALUSrcB = ALUOp = PCWriteCond PCSource = Instruction decode/ register fetch (Op = 'BEQ') 9 ALUSrcA = ALUSrcB = ALUOp = (Op = 'J') Jump completion PCWrite PCSource = 3 (Op = 'LW') Memory access (Op = 'SW') 5 Memory access 7 R-type completion MemRead IorD = MemWrite IorD = RegDst = RegWrite MemtoReg = 4 Write-back step RegDst = RegWrite MemtoReg = 23
24 Come può essere realizzata la macchina corrispondente a questa specifica? ) Con una macchina a stati finiti 2) Con tecnica di controllo microprogrammato Vediamo la prima modalità di realizzazione 24
25 Controllo con macchina a stati finiti Durante l esecuzione di un programma applicativo i circuiti interpretano le istruzioni: del programma costituito dal< programma applicativo i servizi OS> Logica di controllo Realizza f, η Unità di controllo di stato P C Memoria Istruzioni indirizzo Programma Os Servizi [3-26] Unità di elaborazione 25
26 Automa con stati 4 bit per codificarli (S3-S) memorizzati con 4 flip-flop di tipo D Codifica: assegnamento di un valore a ciascuno stato (useremo numero progressivo) PCWrite Control logic Inputs Outputs PCWriteCond IorD MemRead MemWrite IRWrite MemtoReg PCSource ALUOp ALUSrcB ALUSrcA RegWrite RegDst NS3 NS2 NS NS Dobbiamo realizzare due funzioni logiche combinatorie: - funzione di uscita η(s) restituisce 6 segnali di uscita - funzione di stato futuro f(s, I) restituisce NS3 NS dove s = (S3, S2, S, S) I = (OP5,, OP) Op5 Op4 Op3 Op2 Op Op S3 S2 S S Instruction register opcode field State register 26
27 CODIFICA DEGLI STATI 2 Memory address computation ALUSrcA = ALUSrcB = ALUOp = Start Instruction fetch MemRead ALUSrcA = IorD = IRWrite ALUSrcB = ALUOp = PCWrite PCSource = 6 (Op = 'LW') or (Op = 'SW') Execution ALUSrcA = ALUSrcB = ALUOp= 8 (Op = R-type) Branch completion ALUSrcA = ALUSrcB = ALUOp = PCWriteCond PCSource = Instruction decode/ register fetch (Op = 'BEQ') 9 ALUSrcA = ALUSrcB = ALUOp = (Op = 'J') Jump completion PCWrite PCSource = 3 (Op = 'LW') Memory access (Op = 'SW') 5 Memory access 7 R-type completion MemRead IorD = MemWrite IorD = RegDst = RegWrite MemtoReg = 4 Write-back step RegDst = RegWrite MemtoReg = 27
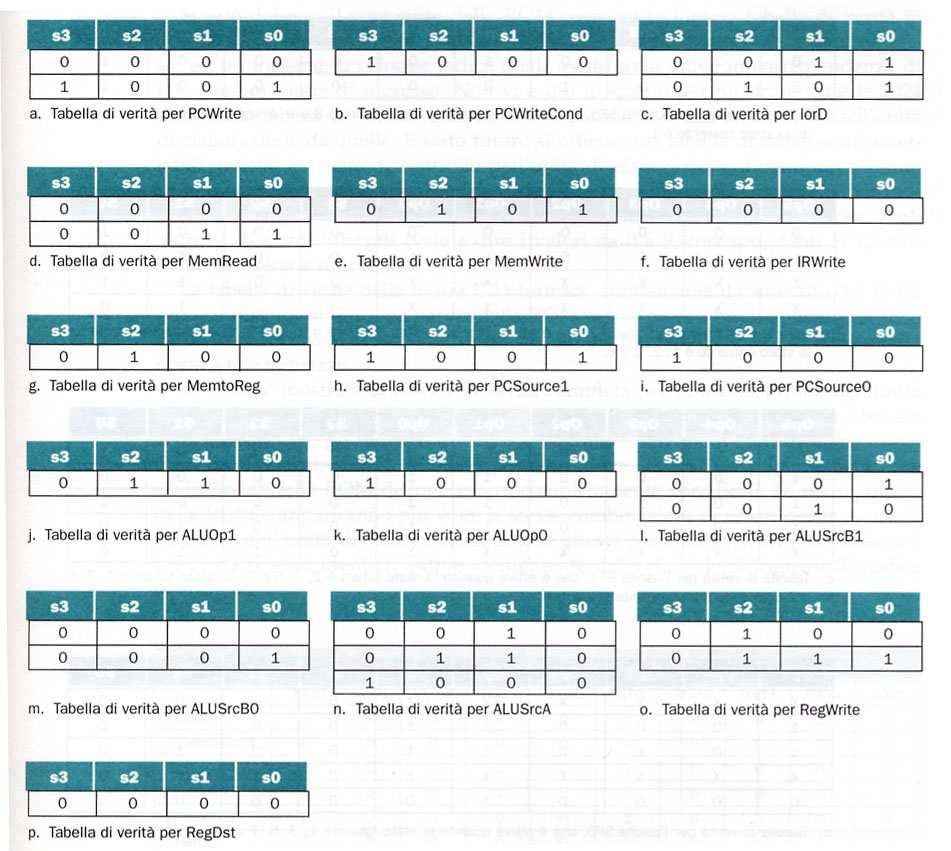
28 SPECIFICA FUNZIONE DI USCITA Tabelle di verità (dipendono solo da stato): indicati solo stati in cui esistono uscite = PCSource (PCSource PCSource) Dal diagramma di stato, si vede che: - PCSource vale nello stato 9 - PCSource vale nello stato 8 S3 S3 S2 S2 S S S S PCSource PCSource IorD Equazioni logiche: PCSource= S3 S2 S S PCSource= S3 S2 S S Dal diagramma di stato, si vede che vale negli stati 3 e 5 IorD= S3 S2 S S + S3 S2 S S Altre uscite ricavate con considerazioni analoghe S3 S2 S S IorD NB: campi Op don t care ( riga sta per 2 6 = 64 righe!) 28
29 29
30 SPECIFICA FUNZIONE DI STATO FUTURO NS: pari a quando stato futuro =, 3, 5, 7, 9 Dall analisi del diagramma di stato, si vede che ad essi si può arrivare: stato : da stato a prescindere da Op stato 3 : da stato 2 con Op = lw [] stato 5: da stato 2 con Op = sw [] stato 7: da stato 6 a prescindere da Op stato 9: da stato con Op = j [] Ciò corrisponde alla tabella di verità: OP5 OP4 OP3 OP2 OP OP S3 S2 S S NS X X X X X X X X X X X X NS = S3 S2 S S + OP5 OP4 OP2 OP OP S3 S2 S S + S3 S2 S S + OP5 OP4 OP3 OP2 OP OP S3 S2 S S 3
31 Con considerazioni analoghe si ricavano le altre uscite di stato futuro Abbiamo la specifica di entrambe le funzioni combinatorie Realizzazione in 2 (*2) modi alternativi: ) Tramite ROM - unica ROM per entrambe le funzioni - due ROM separate 2) Tramite PLA - unica PLA - due PLA separate Vediamo la specifica con due ROM e con due PLA (più efficiente) 3
32 Due ROM separate S ROM Segnali di uscita opcode S ROM 2 4 NS3-- Dimensione: 2 4 * * 4 = 4,3 Kbit Nelle ROM ci sono comunque molti elementi duplicati: - molte combinazioni dell ingresso non si verificano (ROM le codifica tutte) p.es. ho 4 bit per stati: 6-=6 combinazioni non si verificano - a volte le uscite non dipendono da [tutti] i valori dell ingresso. p.es. da stato si passa sempre a stato per qualunque valore di opcode, mentre ROM 2 duplica la parola NS () per 2 6 volte 32
33 PLA unico Ciascuna uscita è OR di termini prodotto (mintermini) Op5 Op4 Op3 Op2 Op Op S3 S2 S S In questo caso: 7 mintermini ( dipendono solo da stato corrente) PCWrite PCWriteCon IorD MemRead MemWrite IRWrite MemtoReg PCSource PCSource ALUOp ALUOp ALUSrcB ALUSrcB ALUSrcA RegWrite RegDst NS3 NS2 NS NS 33
34 Due PLA ) PLA a 4 ingressi (stato corrente) e 6 uscite di controllo mintermini (quelli che dipendevano solo da stato corrente, usati dalle uscite di controllo) Dimensione: 4* + *6 = 2 2) PLA a ingressi (stato e opcode) e 4 uscite di stato futuro mintermini (cfr. figura del PLA: sono quelli usati da uscite di stato futuro, dei quali 7 dipendono da stato e opcode) Dimensione: * + *4 = 4 Dimensione totale: proporzionale a = 34 34
35 NOTA: FINORA ABBIAMO VISTO specifica come FSM e implementazione come FSM Parti combinatorie: - specifica con tab. di verità equazioni logiche - realizzazione con ROM PLA (singole o doppie) ORA VEDIAMO LA SPECIFICA COME microprogramma 35
36 Il controllo specificato come microprogramma Nella pratica, set istruzioni più numeroso o istruzioni più complesse (cfr. Intel) drastico aumento del numero degli stati impraticabile rappresentare gli stati esplicitamente! Molti di questi stati raggiungibili in modo sequenziale (es. precedente: da stato_ si passa sempre a stato_ a prescindere da ingressi) idea: utilizzare i concetti della programmazione - Microistruzioni rappresentano segnali al datapath in un ciclo di clock - Controllo del processore rappresentato da un microprogramma (microistruzioni eseguite in sequenza + salti) VANTAGGIO PRINCIPALE Nel caso di molti stati, semplifica significativamente la specifica del controllo! 36
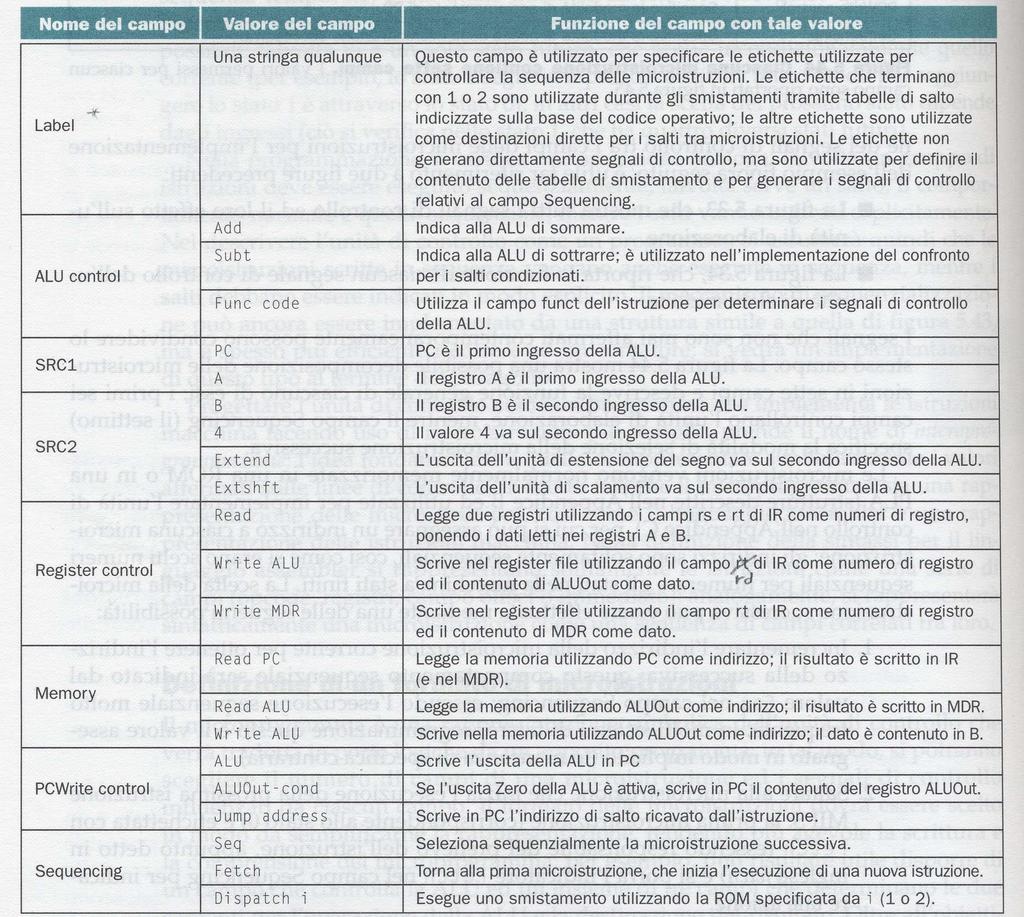
37 Nota bene: Abbiamo: un particolare datapath ISA (che include il formato delle istruzioni macchina) Dobbiamo specificare l unità di controllo! Solo dopo verrà illustrata la realizzazione. Passi necessari: ) Definire Formato (rappresentazione simbolica) delle microistruzioni: - Sequenza di campi distinti - Valori (simbolici) che ogni campo può assumere - Segnali di controllo associati a ciascun campo 37
38 38
39 Notare che: In Register control sono previsti due possibili valori per la scrittura dei registri: - Write ALU: scrive nel registro rd il contenuto di ALUout [usato nelle istruzioni di Tipo-R] - Write MDR: scrive nel registro rt il contenuto di MDR [usato nell istruzione lw] Sono quindi escluse le combinazioni: - scrittura in rt del contenuto di ALUout - scrittura in rd del contenuto di MDR possibili con il datapath progettato ma non usate in istruzioni MIPS considerate. In Memory i valori previsti non permettono ad esempio di: - leggere la memoria indirizzata da ALUout e scrivere il valore letto in IR - scrivere in memoria (il dato contenuto in B) nella locazione indirizzata da PC 39

40 2) Creare Microprogramma: rappresentazione simbolica del controllo traducibile automaticamente in circuiti logici di controllo. Write MDR Read ALU Write ALU Write ALU Fetch NB: Si vede che il microprogramma corrisponde esattamente al diagramma degli stati individuato nella specifica del processore come FSM. Ciò fa già capire come la realizzazione possa essere effettuata mediante: - sequenzializzatore - macchina a stati finiti! 4
41 Note: Nel microprogramma, le microistruzioni sono disposte in sequenza. Ciascuna istruzione può essere etichettata da una label (campo Label) che serve ad identificarla nei salti. Scelta della microistruzione successiva dipende da campo Sequencing: - Seq: eseguita l istruzione successiva nel microprogramma - Fetch: eseguita la microistruzione di fetch, etichettata con label Fetch, che di fatto corrisponde all esecuzione di una nuova istruzione MIPS - Dispatch i: l istruzione successiva viene scelta, sulla base degli ingressi (campo opcode di IR), entro la tabella di smistamento i. Ciascuna tabella contiene la corrispondenza ingresso (campo opcode) label della istruzione cui saltare Le label nel campo Label terminano con un numero i indicante la tabella di smistamento in cui sono contenute (vedi microprogramma). 4

42 Oltre al microprogramma, dobbiamo definire le tabelle di smistamento (forma simbolica) - sulla base di ciascun possibile valore di opcode, a quale istruzione si salta Con ciò la specifica è completa: - formato microistruzioni - microprogramma - tabelle di smistamento Cfr. Ling. Macchina vs. Ling. Assembler 42
 Comandi non specificati: - a elementi di memoria (lettura e scrittura): = - a MUX e controllo elementi combinatori (ALU): = don t care IRWrite 43")
43 A ciascun campo (a parte Sequencing) possiamo già associare segnali di controllo, il cui valore è determinato dal valore simbolico del campo stesso (cfr. Assembler vs. Linguaggio Macchina) Comandi non specificati: - a elementi di memoria (lettura e scrittura): = - a MUX e controllo elementi combinatori (ALU): = don t care IRWrite 43
44 REALIZZAZIONE DELLA SPECIFICA CON MICROPROGRAMMA Dobbiamo decidere come realizzare: - funzione di controllo (determina le uscite di controllo Data Path) - funzione di sequenzializzazione (determina la sequenza di computazione) Esistono due modalità di realizzazione: - come macchina a stati finiti (corrisponde alla stessa vista in precedenza): Funzione di controllo = funzione di uscita Funzione di sequenzializzazione = funzione di stato futuro funzione stato futuro codifica esplicitamente lo stato NB: vedremo brevemente questa tecnica alla fine - Usando una ROM per memorizzare le microistruzioni (funzione di controllo) ed un contatore che fornisce in maniera sequenziale l indirizzo microistruzione (stato futuro): la codifica dello stato all interno dell unità di controllo diventa un indirizzo Controllo microprogrammato della microistruzione 44
45 Controllo Microprogrammato Durante l esecuzione di un programma applicativo i circuiti interpretano iterativamente il microprogramma sulle istruzioni del < programma applicativo i servizi OS>. clock Unità di Controllo Microprogramma (ROM o PLA) Contatore di microprogramma Logica selezione dell indirizzo P C Memoria indirizzo Programma applicativo Istruzioni [3-26] Unità di Os Servizi elaborazione 45
46 Logica di selezione dell indirizzo, sulla base del segnale di controllo proveniente da microistruzione corrente, sceglie l indirizzo successivo tra: - indirizzo incrementato (microistruzione successiva) - indirizzo (di fetch) - indirizzo determinato da tabelle di dispatch funzione di opcode Segnale di controllo AddrCt a due bit (proveniente da microistruzione). PLA or ROM Adder State Mux 3 2 AddrCt Dispatch ROM 2 Dispatch ROM Address select logic Op Instruction register opcode field 46
47 A questo punto possiamo associare i valori simbolici del campo Sequencing al segnale di controllo AddrCt: - Seq AddrCt = - Fetch AddrCt = - Dispatch AddrCt = - Dispatch 2 AddrCt = Abbiamo quindi la corrispondenza completa valori campi-segnali Fase successiva: corrisponde alla compilazione del Linguaggio Assembler in LM Microprogramma in forma simbolica Tabelle di smistamento (simboliche) Formato microistruzioni Associazione campi - segnali ASSEMBLATORE DI MICROCODICE Specifica - ROM di controllo - ROM di smistamento (dispatch) 47
48 Controllo microprogrammato (realizzato con sequenzializzatore): valutazione Specifica come macchina a stati finiti: abbiamo visto che, nel caso delle 2 ROM: 2 4 * * 4 = uscita stato futuro 6% 94% Istruzioni complesse (p.es. virgola mobile) sono caratterizzate da sequenze di stati indipendenti da ingressi (opcode); all aumentare del set di istruzioni disponibili, queste sequenze diventano via via più frequenti Inoltre, complessità e numerosità delle istruzioni porta ad aumento numero stati totali In una macchina a stati, la funzione di stato futuro deve comunque codificare tutte le transizioni stato-stato: anche per quelle indipendenti da ingressi lo stato destinazione deve essere esplicitamente codificato; in una tabella di verità, vi sarà una riga per ogni transizione [opcode don t care]. Nel controllo microprogrammato, la funzione di controllo ha solo due bit in più per decidere la modalità di selezione: transizioni sequenziali non codificano esplicitamente lo stato destinazione, ma solo che bisogna scegliere il seguente. Le ROM di smistamento memorizzano solo stati cui si arriva in dipendenza dall ingresso! Stati in sequenza non codificati, semplificando unità di controllo wrt. FSM VEDIAMO IN DETTAGLIO 48
49 Implementazione di controllo e smistamento tramite ROM: dimensioni ROM di controllo: microistruzioni 4 bit di indirizzo ciascuna parola (microistruzione) 6+2 = 8 bit Dimensione: 2 4 * 8 = 288 bit ROM di smistamento: indirizzate da Opcode 6 bit di indirizzo ciascuna parola ha 4 bit Dimensione: 2 6 * 4 = 256 bit Dimensione totale = *256 = 8 bit 49
50 Implementazione di controllo e smistamento tramite PLA: dimensioni PLA di controllo: funzione stato (4 bit) bit di controllo di indirizzo Avevamo visto che per 6 uscite si usano mintermini (tutti i stati); quindi i 2 bit di controllo di indirizzo useranno parte di questi mintermini Dimensione: = 4* + *8 = 22 PLA di smistamento : funzione bit di opcode (6 bit) 4 bit di indirizzo [stato] dalla specifica ROM di smistamento si vede che ci sono 5 combinazioni di opcode che interessano: 5 mintermini Dimensione: = 6*5 + 5*4 = 5 PLA di smistamento 2: funzione bit di opcode (6 bit) 4 bit di indirizzo [stato] da specifica ROM di smistamento 2 si vede che ci sono 2 combinazioni di opcode che interessano: 2 mintermini Dimensione: = 6*2 + 2*4 = 2 Dimensione totale = = 29 5
51 Confronto con implementazione a stato esplicito Tramite ROM: Controllo Stato futuro/ smistamento Totale Stato esplicito K Microprog Tramite PLA: Controllo Stato futuro/ smistamento Totale Stato esplicito Microprog Lieve aumento della dimensione per il controllo (dovuta all introduzione dei segnali AddrCt per la scelta della microistruzione successiva) compensato dalla diminuzione della dimensione per stato futuro 5
52 Vantaggi e svantaggi della microprogrammazione Vantaggi a livello della specifica: - facilità nella scrittura (e progettazione) del codice vs. automa Vantaggi nell implementazione (usando ROM): - facile da modificare - possibilità di simulare altre architetture Svantaggi nell implementazione, tenendo conto che ora: - non c è più necessità di correzione grazie a strumenti CAD - unità di controllo non può essere esterna al processore (ragioni di efficienza) - Uso di cache interna ROM con microcodice non è più veloce rispetto a RAM (RISC vs. CISC) 52
53 NB: ABBIAMO VISTO Processore multi-ciclo [Unità di controllo sequenziale] - specifica come FSM e implementazione come FSM - specifica come microprogramma e implementazione con sequenzializzatore Sono possibili anche gli altri due passaggi! specifica come microprogramma e implementazione come FSM Ogni microistruzione corrisponde ad uno stato: codifica (numerica) dello stato dai valori dei campi di controllo delle microistruzioni deriva la funzione: stato uscita [funzione di uscita] dal campo Sequencing di una microistruzione (stato) + tabelle smistamento simboliche [che codificano istruzione futura sulla base di ingressi opcode] deriva la funzione: stato*ingressi stato futuro [funzione di stato futuro] 53
54 specifica come FSM e implementazione con sequenzializzatore Ogni stato corrisponde ad una microistruzione: assegnazione di un ordine agli stati (conviene: transizioni tra stati indipendenti dall ingresso stati posti in sequenza!) dalla funzione di uscita derivano per ogni microistruzione i segnali di controllo da attivare dalla funzione di stato futuro si può stabilire se vi sia un unica transizione verso la microistruzione seguente, verso la microistruzione di fetch o se la transizione dipenda dall ingresso [tabella di smistamento], ovvero: campo Sequencing tabelle di smistamento NB: l uso di strumenti automatici per la realizzazione (in grado di applicare tecniche di ottimizzazione) rende le fasi di specifica e realizzazione relativamente indipendenti! Si può scegliere la specifica che risulta più semplice e gestibile 54
55 Controllo di un processore-multiciclo: Riepilogo specifica e realizzazione Initial representation Finite state diagram Microprogram Sequencing control Explicit next state function Microprogram counter + dispatch ROMS Logic representation Logic equations Truth tables Implementation technique Programmable logic array Read only memory 55
56 ECCEZIONI Eventi inattesi che cambiano il flusso di esecuzione delle istruzioni Eccezioni: provenienti dall interno del processore - uso di istruzioni indefinite, divisione per zero, overflow, ecc. - chiamata del sistema operativo da parte di un programma utente Interruzioni (interrupt): provenienti dall esterno del processore (es. richieste dei dispositivi di I/O) NB: terminologia non standard, p.es. - Intel 8x86: si utilizza il termine interrupt per tutti gli eventi - MIPS: eccezione indica tutti gli eventi (esterni ed interni), quelli esterni sono anche chiamati interrupt ORA vediamo: eccezioni dovute a istruzioni indefinite e overflow 56
57 Gestione delle eccezioni Controllo trasferito a routine di servizio (handler S.O.) L indirizzo dell istruzione che causa l eccezione è salvata in EPC (exception program counter) Viene segnalata la causa: - in un registro di stato (approccio usato dal MIPS: cause register) e il controllo è trasferito a routine di indirizzo predefinito - mediante interrupt vettorizzato (indirizzi diversi a seconda della causa, tipicamente separati di poche istruzioni, p.es. 8) Vediamo come modificare il datapath per gestire eccezioni secondo l architettura MIPS: - undefined instruction: Causa[]= - overflow: Causa[]= 57

58 Modifiche datapath 58
59 Identificazione delle due tipologie di eccezioni istruzione indefinita: nella fase di decode overflow: quando si usa la ALU (un output dell ALU segnala overflow) UC A L U overflow NB: serve un registro di appoggio per non allungare il periodo di clock [la parte in rosso non è riportata nel datapath, ma c è!] 59
60 Modifiche diagramma degli stati 6
61 Nota Con questa implementazione, l istruzione che ha causato overflow scrive comunque nel registro destinazione (ISA MIPS non lo prevede). Per esercizio: pensare a come si potrebbe risolvere il problema Nota 2 Cosa fa la routine di servizio (SO)? Se il programma si può riprendere - azione correttiva - usa EPC per ritornare al programma Altrimenti: interrompe il programma (e segnala la causa) 6
Controllo con macchina a stati finiti
 Controllo con macchina a stati finiti Durante l esecuzione di un programma applicativo i circuiti interpretano le istruzioni: del programma costituito dal< programma applicativo i servizi OS> Logica di
Controllo con macchina a stati finiti Durante l esecuzione di un programma applicativo i circuiti interpretano le istruzioni: del programma costituito dal< programma applicativo i servizi OS> Logica di
Richiami sull architettura del processore MIPS a 32 bit
 Richiami sull architettura del processore MIPS a 32 bit Architetture Avanzate dei Calcolatori Valeria Cardellini Caratteristiche principali dell architettura del processore MIPS E un architettura RISC
Richiami sull architettura del processore MIPS a 32 bit Architetture Avanzate dei Calcolatori Valeria Cardellini Caratteristiche principali dell architettura del processore MIPS E un architettura RISC
CALCOLATORI ELETTRONICI 15 aprile 2014
 CALCOLATORI ELETTRONICI 15 aprile 2014 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1 Di seguito è riportato lo schema di una ALU a 32 bit in grado
CALCOLATORI ELETTRONICI 15 aprile 2014 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1 Di seguito è riportato lo schema di una ALU a 32 bit in grado
Implementazione semplificata
 Il processore 168 Implementazione semplificata Copre un sottoinsieme limitato di istruzioni rappresentative dell'isa MIPS aritmetiche/logiche: add, sub, and, or, slt accesso alla memoria: lw, sw trasferimento
Il processore 168 Implementazione semplificata Copre un sottoinsieme limitato di istruzioni rappresentative dell'isa MIPS aritmetiche/logiche: add, sub, and, or, slt accesso alla memoria: lw, sw trasferimento
CALCOLATORI ELETTRONICI 29 giugno 2011
 CALCOLATORI ELETTRONICI 29 giugno 2011 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di una PLA la funzione combinatoria (a 3 ingressi e due uscite)
CALCOLATORI ELETTRONICI 29 giugno 2011 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di una PLA la funzione combinatoria (a 3 ingressi e due uscite)
CALCOLATORI ELETTRONICI 29 giugno 2010
 CALCOLATORI ELETTRONICI 29 giugno 2010 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si disegni lo schema di un flip-flop master-slave S-R sensibile ai fronti di salita e
CALCOLATORI ELETTRONICI 29 giugno 2010 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si disegni lo schema di un flip-flop master-slave S-R sensibile ai fronti di salita e
L unità di controllo. Il processore: unità di controllo. Le macchine a stati finiti. Struttura della macchina a stati finiti
 Il processore: unità di lo Architetture dei Calcolatori (lettere A-I) L unità di lo L unità di lo è responsabile della generazione dei segnali di lo che vengono inviati all unità di elaborazione Alcune
Il processore: unità di lo Architetture dei Calcolatori (lettere A-I) L unità di lo L unità di lo è responsabile della generazione dei segnali di lo che vengono inviati all unità di elaborazione Alcune
Architettura dei calcolatori e sistemi operativi. Il processore Capitolo 4 P&H
 Architettura dei calcolatori e sistemi operativi Il processore Capitolo 4 P&H 4. 11. 2015 Sommario Instruction Set di riferimento per il processore Esecuzione delle istruzioni Struttura del processore
Architettura dei calcolatori e sistemi operativi Il processore Capitolo 4 P&H 4. 11. 2015 Sommario Instruction Set di riferimento per il processore Esecuzione delle istruzioni Struttura del processore
CALCOLATORI ELETTRONICI 31 marzo 2015
 CALCOLATORI ELETTRONICI 31 marzo 2015 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1. Tradurre in linguaggio assembly MIPS il seguente frammento di
CALCOLATORI ELETTRONICI 31 marzo 2015 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1. Tradurre in linguaggio assembly MIPS il seguente frammento di
Università degli Studi di Cassino
 Corso di Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 2007/2008 Francesco Tortorella Istruzioni di confronto Istruzione Significato slt $t1,$t2,$t3 if
Corso di Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 2007/2008 Francesco Tortorella Istruzioni di confronto Istruzione Significato slt $t1,$t2,$t3 if
Il set istruzioni di MIPS Modalità di indirizzamento. Proff. A. Borghese, F. Pedersini
 Architettura degli Elaboratori e delle Reti Il set istruzioni di MIPS Modalità di indirizzamento Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli Elaboratori e delle Reti Il set istruzioni di MIPS Modalità di indirizzamento Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Corso di Calcolatori Elettronici MIPS: Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M.
 di Cassino e del Lazio Meridionale Corso di MIPS: Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 201/201 Francesco Tortorella Istruzioni di confronto Istruzione
di Cassino e del Lazio Meridionale Corso di MIPS: Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 201/201 Francesco Tortorella Istruzioni di confronto Istruzione
Architettura di tipo registro-registro (load/store)
") Caratteristiche principali dell architettura del processore MIPS E un architettura RISC (Reduced Instruction Set Computer) Esegue soltanto istruzioni con un ciclo base ridotto, cioè costituito da poche
Caratteristiche principali dell architettura del processore MIPS E un architettura RISC (Reduced Instruction Set Computer) Esegue soltanto istruzioni con un ciclo base ridotto, cioè costituito da poche
Architettura di un calcolatore e linguaggio macchina. Primo modulo Tecniche della programmazione
 Architettura di un calcolatore e linguaggio macchina Primo modulo Tecniche della programmazione CPU Central Processing Unit, processore Unita logica/aritmetica: elaborazione dati Unita di controllo: coordina
Architettura di un calcolatore e linguaggio macchina Primo modulo Tecniche della programmazione CPU Central Processing Unit, processore Unita logica/aritmetica: elaborazione dati Unita di controllo: coordina
Elementi base per la realizzazione dell unità di calcolo
 Elementi base per la realizzazione dell unità di calcolo Memoria istruzioni elemento di stato dove le istruzioni vengono memorizzate e recuperate tramite un indirizzo. ind. istruzione Memoria istruzioni
Elementi base per la realizzazione dell unità di calcolo Memoria istruzioni elemento di stato dove le istruzioni vengono memorizzate e recuperate tramite un indirizzo. ind. istruzione Memoria istruzioni
AXO - Architettura dei Calcolatori e Sistema Operativo. organizzazione strutturata dei calcolatori
 AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
Il processore. Istituzionii di Informatica -- Rossano Gaeta
 Il processore Il processore (detto anche CPU, ovvero, Central Processing Unit) è la componente dell unità centrale che fornisce la capacità di elaborazione delle informazioni contenute nella memoria principale
Il processore Il processore (detto anche CPU, ovvero, Central Processing Unit) è la componente dell unità centrale che fornisce la capacità di elaborazione delle informazioni contenute nella memoria principale
Linguaggio macchina. 3 tipi di istruzioni macchina. Istruzioni per trasferimento dati. Istruzioni logico/aritmetiche
 3 tipi di istruzioni macchina Linguaggio macchina e assembler 1) trasferimento tra RAM e registri di calcolo della CPU 2) operazioni aritmetiche: somma, differenza, moltiplicazione e divisione 3) operazioni
3 tipi di istruzioni macchina Linguaggio macchina e assembler 1) trasferimento tra RAM e registri di calcolo della CPU 2) operazioni aritmetiche: somma, differenza, moltiplicazione e divisione 3) operazioni
Il linguaggio del calcolatore: linguaggio macchina e linguaggio assembly
 Il linguaggio del calcolatore: linguaggio macchina e linguaggio assembly Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Richiamo sull
Il linguaggio del calcolatore: linguaggio macchina e linguaggio assembly Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Richiamo sull
Componenti di un processore
 Componenti di un processore Unità di Controllo Bus Interno REGISTRI Program Counter (PC) Registro di Stato (SR) Registro Istruzioni (IR) Registri Generali Unità Aritmetico- Logica Registro Indirizzi Memoria
Componenti di un processore Unità di Controllo Bus Interno REGISTRI Program Counter (PC) Registro di Stato (SR) Registro Istruzioni (IR) Registri Generali Unità Aritmetico- Logica Registro Indirizzi Memoria
Il Ciclo Fetch-Decode-Execute. C Nyssen/Aberdeen College 2003
 Il Ciclo Fetch-Decode-Execute C Nyssen/Aberdeen College 2003 Linguaggio Assembler Op code (Mnemonico) Operando #assembly code program 0000 LDA-24 #loads 0001 ADD-25 #adds 0002 HLT #stops #end of program
Il Ciclo Fetch-Decode-Execute C Nyssen/Aberdeen College 2003 Linguaggio Assembler Op code (Mnemonico) Operando #assembly code program 0000 LDA-24 #loads 0001 ADD-25 #adds 0002 HLT #stops #end of program
ARCHITETTURA DI UN SISTEMA DI ELABORAZIONE
 ARCHITETTURA DI UN SISTEMA DI ELABORAZIONE Il computer o elaboratore è una macchina altamente organizzata capace di immagazzinare, elaborare e trasmettere dati con notevole precisione e rapidità. Schematicamente
ARCHITETTURA DI UN SISTEMA DI ELABORAZIONE Il computer o elaboratore è una macchina altamente organizzata capace di immagazzinare, elaborare e trasmettere dati con notevole precisione e rapidità. Schematicamente
Architettura dei computer
 Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore la memoria principale (memoria centrale, RAM) la memoria secondaria i dispositivi di input/output La
Architettura dei computer In un computer possiamo distinguere quattro unità funzionali: il processore la memoria principale (memoria centrale, RAM) la memoria secondaria i dispositivi di input/output La
Struttura del processore. Funzionamento del processore
 Struttura del processore L unità di elaborazione Funzionamento del processore. Prelievo dell istruzione dalla memoria al processore (dall indirizzo indicato dal PC al registro di istruzione IR) IR [[PC]]
Struttura del processore L unità di elaborazione Funzionamento del processore. Prelievo dell istruzione dalla memoria al processore (dall indirizzo indicato dal PC al registro di istruzione IR) IR [[PC]]
L unità di elaborazione e di controllo
 L unità di elaborazione e di controllo 1 The Processor: Datapath & Control We're ready to look at an implementation of the MIPS Simplified to contain only: memory-reference instructions: lw, sw arithmetic-logical
L unità di elaborazione e di controllo 1 The Processor: Datapath & Control We're ready to look at an implementation of the MIPS Simplified to contain only: memory-reference instructions: lw, sw arithmetic-logical
Fasi (MIPS) Dove NPC è un registro temporaneo PC (program counter) è il registro IP (instruction pointer)
 Dove NPC è un registro temporaneo PC (program counter) è il registro IP (instruction pointer)") Fasi (MIPS) Fasi senza pipeline: IF (istruction fetch): IR Mem[PC] ; NPC PC + 4 ; Dove NPC è un registro temporaneo PC (program counter) è il registro IP (instruction pointer) Lezione Architettura degli
Fasi (MIPS) Fasi senza pipeline: IF (istruction fetch): IR Mem[PC] ; NPC PC + 4 ; Dove NPC è un registro temporaneo PC (program counter) è il registro IP (instruction pointer) Lezione Architettura degli
Architettura di un calcolatore e ciclo macchina. Appunti per la classe 3 Dinf
 Architettura di un calcolatore e ciclo macchina Appunti per la classe 3 Dinf Il Sistema di Elaborazione Computer Hardware Software 2 Hardware Struttura fisica del calcolatore formata dai circuiti elettronici
Architettura di un calcolatore e ciclo macchina Appunti per la classe 3 Dinf Il Sistema di Elaborazione Computer Hardware Software 2 Hardware Struttura fisica del calcolatore formata dai circuiti elettronici
Architettura di una CPU
 Massimo VIOLANTE Politecnico di Torino Dipartimento di Automatica e Informatica Sommario Organizzazione di un processore Linguaggio macchina Modi di indirizzamento Tipi di istruzioni 2 M. Violante 1.1
Massimo VIOLANTE Politecnico di Torino Dipartimento di Automatica e Informatica Sommario Organizzazione di un processore Linguaggio macchina Modi di indirizzamento Tipi di istruzioni 2 M. Violante 1.1
L unità di controllo di CPU multi-ciclo
 L unità di controllo di CPU multi-ciclo Prof. Alberto Borghese Dipartimento di Scienze dell Informazione [email protected] Università degli Studi di Milano A.A. 23-24 /2 Sommario I segnali di controllo
L unità di controllo di CPU multi-ciclo Prof. Alberto Borghese Dipartimento di Scienze dell Informazione [email protected] Università degli Studi di Milano A.A. 23-24 /2 Sommario I segnali di controllo
Linguaggi di alto livello, compilatori e interpreti
 Linguaggi di alto livello, compilatori e interpreti Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Il punto della situazione STATO DATI
Linguaggi di alto livello, compilatori e interpreti Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Il punto della situazione STATO DATI
Calcolatori Elettronici
 Calcolatori Elettronici CPU a singolo ciclo assimiliano Giacomin Schema del processore (e memoria) Unità di controllo Condizioni SEGNALI DI CONTROLLO PC emoria indirizzo IR dato letto UNITA DI ELABORAZIONE
Calcolatori Elettronici CPU a singolo ciclo assimiliano Giacomin Schema del processore (e memoria) Unità di controllo Condizioni SEGNALI DI CONTROLLO PC emoria indirizzo IR dato letto UNITA DI ELABORAZIONE
Esercitazione sulle CPU pipeline
 Esercitazione sulle CPU pipeline Una CPU a ciclo singolo come pure una CPU multi ciclo eseguono una sola istruzione alla volta. Durante l esecuzione parte dell hardware della CPU rimane inutilizzato perché
Esercitazione sulle CPU pipeline Una CPU a ciclo singolo come pure una CPU multi ciclo eseguono una sola istruzione alla volta. Durante l esecuzione parte dell hardware della CPU rimane inutilizzato perché
Architettura degli Elaboratori. Classe 3 Prof.ssa Anselmo. Appello del 18 Febbraio Attenzione:
 Cognome.. Nome.... Architettura degli Elaboratori Classe 3 Prof.ssa Anselmo Appello del 18 Febbraio 2015 Attenzione: Inserire i propri dati nell apposito spazio sottostante e in testa a questa pagina.
Cognome.. Nome.... Architettura degli Elaboratori Classe 3 Prof.ssa Anselmo Appello del 18 Febbraio 2015 Attenzione: Inserire i propri dati nell apposito spazio sottostante e in testa a questa pagina.
che vengano generati nell ordine corretto i sistema (es., la memoria, l unità aritmetico-
 Principi di architetture dei calcolatori: l unità di controllo Mariagiovanna Sami L unità di controllo Per eseguire le istruzioni di macchina, occorre che vengano generati nell ordine corretto i segnali
Principi di architetture dei calcolatori: l unità di controllo Mariagiovanna Sami L unità di controllo Per eseguire le istruzioni di macchina, occorre che vengano generati nell ordine corretto i segnali
Architettura di un processore basato su registri generali.
 Architettura di un processore basato su registri generali. M. Esposito ([email protected]) 26 febbraio 2007 In Fig. 1 è riportato uno schema di principio che raffigura l architettura di un processore basato
Architettura di un processore basato su registri generali. M. Esposito ([email protected]) 26 febbraio 2007 In Fig. 1 è riportato uno schema di principio che raffigura l architettura di un processore basato
Accesso a memoria. Accesso a memoria. Accesso a memoria. Modalità di indirizzamento. Lezione 5 e 6. Architettura degli Elaboratori A.
 < < } } Lezione 5 e 6 Accesso a memoria A questo livello di astrazione, la memoria viene vista come un array di byte Per ogni richiesta di un dato ad un certo indirizzo, la CPU ottiene un numero di byte
< < } } Lezione 5 e 6 Accesso a memoria A questo livello di astrazione, la memoria viene vista come un array di byte Per ogni richiesta di un dato ad un certo indirizzo, la CPU ottiene un numero di byte
L ARCHITETTURA DEI CALCOLATORI. Il processore La memoria centrale La memoria di massa Le periferiche di I/O
 L ARCHITETTURA DEI CALCOLATORI Il processore La memoria centrale La memoria di massa Le periferiche di I/O Caratteristiche dell architettura 2 Flessibilità adatta a svolgere diverse tipologie di compiti
L ARCHITETTURA DEI CALCOLATORI Il processore La memoria centrale La memoria di massa Le periferiche di I/O Caratteristiche dell architettura 2 Flessibilità adatta a svolgere diverse tipologie di compiti
Architettura (10/9/2003) Pag. 1/6. Cognome e Nome (in stampatello):
 Pag. 1/6. Cognome e Nome (in stampatello):") Architettura (10/9003) Pag. 1/6 Esame di Architettura (matr.0-1) del 10/9003 Per Fondamenti di Architettura NON rispondere Per le domande a risposta multipla cerchiare la risposta scelta. Non alle domande
Architettura (10/9003) Pag. 1/6 Esame di Architettura (matr.0-1) del 10/9003 Per Fondamenti di Architettura NON rispondere Per le domande a risposta multipla cerchiare la risposta scelta. Non alle domande
CPU. Maurizio Palesi
 CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
CPU Central Processing Unit 1 Organizzazione Tipica CPU Dispositivi di I/O Unità di controllo Unità aritmetico logica (ALU) Terminale Stampante Registri CPU Memoria centrale Unità disco Bus 2 L'Esecutore
LA GESTIONE DELLA I/O
 LA GESTIONE DELLA I/O Il S.O. È l interfaccia tra l hardware e i programmi che effettuano richieste di I/O Sottosistema di I/O strutturato in moduli chiamati DRIVER uno per ogni dispositivo I Driver rendono
LA GESTIONE DELLA I/O Il S.O. È l interfaccia tra l hardware e i programmi che effettuano richieste di I/O Sottosistema di I/O strutturato in moduli chiamati DRIVER uno per ogni dispositivo I Driver rendono
Cicli di clock e istruzioni
 Cicli di clock e istruzioni Numero di cicli di clock differenti per istruzioni differenti Le moltiplicazioni impiegano più tempo delle addizioni Operazioni in virgola mobile impiegano più tempo delle operazioni
Cicli di clock e istruzioni Numero di cicli di clock differenti per istruzioni differenti Le moltiplicazioni impiegano più tempo delle addizioni Operazioni in virgola mobile impiegano più tempo delle operazioni
Elementi di base del calcolatore
 Elementi di base del calcolatore Registri: dispositivi elettronici capaci di memorizzare insiemi di bit (8, 16, 32, 64, ) Clock: segnale di sincronizzazione per tutto il sistema si misura in cicli/secondo
Elementi di base del calcolatore Registri: dispositivi elettronici capaci di memorizzare insiemi di bit (8, 16, 32, 64, ) Clock: segnale di sincronizzazione per tutto il sistema si misura in cicli/secondo
Calcolatori Elettronici B a.a. 2006/2007
 Calcolatori Elettronici B a.a. 2006/2007 RETI LOGICHE: RICHIAMI Massimiliano Giacomin 1 Due tipi di unità funzionali Elementi di tipo combinatorio: - valori di uscita dipendono solo da valori in ingresso
Calcolatori Elettronici B a.a. 2006/2007 RETI LOGICHE: RICHIAMI Massimiliano Giacomin 1 Due tipi di unità funzionali Elementi di tipo combinatorio: - valori di uscita dipendono solo da valori in ingresso
Architettura. Indice:
 Architettura Indice: Architettura 1 Architettura degli elaboratori (3 / 10 / 2006)...4 Livelli di astrazione...4 Architettura di Von Neumann...4 La CPU...5 La memoria...5 Rappresentare gli interi...6 Rappresentazione
Architettura Indice: Architettura 1 Architettura degli elaboratori (3 / 10 / 2006)...4 Livelli di astrazione...4 Architettura di Von Neumann...4 La CPU...5 La memoria...5 Rappresentare gli interi...6 Rappresentazione
Laboratorio di Architettura degli Elaboratori LabArch 2007 Terzo Quadimestre, a.a Docente: H. Muccini
 [http://www.di.univaq.it/muccini/labarch] Laboratorio di Architettura degli Elaboratori LabArch 2007 Terzo Quadimestre, a.a. 2006-2007 Docente: H. Muccini Lecture 12: - Numeri con segno -Somma e sottrazione
[http://www.di.univaq.it/muccini/labarch] Laboratorio di Architettura degli Elaboratori LabArch 2007 Terzo Quadimestre, a.a. 2006-2007 Docente: H. Muccini Lecture 12: - Numeri con segno -Somma e sottrazione
Somma di numeri floating point. Algoritmi di moltiplicazione e divisione per numeri interi
 Somma di numeri floating point Algoritmi di moltiplicazione e divisione per numeri interi Standard IEEE754 " Standard IEEE754: Singola precisione (32 bit) si riescono a rappresentare numeri 2.0 10 2-38
Somma di numeri floating point Algoritmi di moltiplicazione e divisione per numeri interi Standard IEEE754 " Standard IEEE754: Singola precisione (32 bit) si riescono a rappresentare numeri 2.0 10 2-38
Modi di indirizzamento del processore MC68000 (parte prima)
") Corso di Calcolatori Elettronici I A.A. 2011-2012 Modi di indirizzamento del processore MC68000 (parte prima) Lezione 21 Prof. Antonio Pescapè Università degli Studi di Napoli Federico II Facoltà di Ingegneria
Corso di Calcolatori Elettronici I A.A. 2011-2012 Modi di indirizzamento del processore MC68000 (parte prima) Lezione 21 Prof. Antonio Pescapè Università degli Studi di Napoli Federico II Facoltà di Ingegneria
Tutorato Architettura degli elaboratori
 Tutorato Architettura degli elaboratori Dott. Damiano Braga Before we start.. Orario 12 Aprile h. 14.00-16.00 aula F6 20 Aprile h. 11.30-13.30 aula F6 10 Maggio h. 14.00-16.00 aula F4 18 Maggio h. 11.30-13.30
Tutorato Architettura degli elaboratori Dott. Damiano Braga Before we start.. Orario 12 Aprile h. 14.00-16.00 aula F6 20 Aprile h. 11.30-13.30 aula F6 10 Maggio h. 14.00-16.00 aula F4 18 Maggio h. 11.30-13.30
Architettura del calcolatore
 Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Architettura del calcolatore La prima decomposizione di un calcolatore è relativa a due macro-componenti: Hardware Software Architettura del calcolatore L architettura dell hardware di un calcolatore reale
Sviluppo di programmi
 Sviluppo di programmi Per la costruzione di un programma conviene: 1. condurre un analisi del problema da risolvere 2. elaborare un algoritmo della soluzione rappresentato in un linguaggio adatto alla
Sviluppo di programmi Per la costruzione di un programma conviene: 1. condurre un analisi del problema da risolvere 2. elaborare un algoritmo della soluzione rappresentato in un linguaggio adatto alla
Informatica ALGORITMI E LINGUAGGI DI PROGRAMMAZIONE. Francesco Tura. F. Tura
 Informatica ALGORITMI E LINGUAGGI DI PROGRAMMAZIONE Francesco Tura [email protected] 1 Lo strumento dell informatico: ELABORATORE ELETTRONICO [= calcolatore = computer] Macchina multifunzionale Macchina
Informatica ALGORITMI E LINGUAGGI DI PROGRAMMAZIONE Francesco Tura [email protected] 1 Lo strumento dell informatico: ELABORATORE ELETTRONICO [= calcolatore = computer] Macchina multifunzionale Macchina
Lezione n.19 Processori RISC e CISC
 Lezione n.19 Processori RISC e CISC 1 Processori RISC e Superscalari Motivazioni che hanno portato alla realizzazione di queste architetture Sommario: Confronto tra le architetture CISC e RISC Prestazioni
Lezione n.19 Processori RISC e CISC 1 Processori RISC e Superscalari Motivazioni che hanno portato alla realizzazione di queste architetture Sommario: Confronto tra le architetture CISC e RISC Prestazioni
Il calcolatore. Architettura di un calcolatore (Hardware)
") Il calcolatore Prima parlare della programmazione, e' bene fare una brevissima introduzione su come sono strutturati i calcolatori elettronici. I calcolatori elettronici sono stati progettati e costruiti
Il calcolatore Prima parlare della programmazione, e' bene fare una brevissima introduzione su come sono strutturati i calcolatori elettronici. I calcolatori elettronici sono stati progettati e costruiti
Corso di Informatica di Base
 Corso di Informatica di Base A.A. 2011/2012 Algoritmi e diagrammi di flusso Luca Tornatore Cos è l informatica? Calcolatore: esecutore di ordini o automa Programma: insieme di istruzioni che possono essere
Corso di Informatica di Base A.A. 2011/2012 Algoritmi e diagrammi di flusso Luca Tornatore Cos è l informatica? Calcolatore: esecutore di ordini o automa Programma: insieme di istruzioni che possono essere
Analizzatore lessicale o scanner. Lo scanner rappresenta un'interfaccia fra il programma sorgente e l'analizzatore sintattico o parser.
 Analizzatore lessicale o scanner Dispensa del corso di Linguaggi e Traduttori A.A. 2005-2006 Lo scanner rappresenta un'interfaccia fra il programma sorgente e l'analizzatore sintattico o parser. Lo scanner,
Analizzatore lessicale o scanner Dispensa del corso di Linguaggi e Traduttori A.A. 2005-2006 Lo scanner rappresenta un'interfaccia fra il programma sorgente e l'analizzatore sintattico o parser. Lo scanner,
Esercitazioni di Reti Logiche. Lezione 4
 Esercitazioni di Reti Logiche Lezione 4 Progettazione dei circuiti logici combinatori Zeynep KIZILTAN [email protected] Argomenti Procedura di analisi dei circuiti combinatori. Procedura di sintesi
Esercitazioni di Reti Logiche Lezione 4 Progettazione dei circuiti logici combinatori Zeynep KIZILTAN [email protected] Argomenti Procedura di analisi dei circuiti combinatori. Procedura di sintesi
Lezione 1: L hardware
 Architettura del calcolatore Lezione 1: L hardware Architettura Componenti e funzionamento Il calcolatore è uno strumento programmabile per la rappresentazione, la memorizzazione e l elaborazione delle
Architettura del calcolatore Lezione 1: L hardware Architettura Componenti e funzionamento Il calcolatore è uno strumento programmabile per la rappresentazione, la memorizzazione e l elaborazione delle
Informatica Teorica. Macchine a registri
 Informatica Teorica Macchine a registri 1 Macchine a registri RAM (Random Access Machine) astrazione ragionevole di un calcolatore nastro di ingresso nastro di uscita unità centrale in grado di eseguire
Informatica Teorica Macchine a registri 1 Macchine a registri RAM (Random Access Machine) astrazione ragionevole di un calcolatore nastro di ingresso nastro di uscita unità centrale in grado di eseguire
La memoria principale
 La memoria principale DRAM (Dynamic RAM) il contenuto viene memorizzato per pochissimo tempo per cui deve essere aggiornato centinaia di volte al secondo (FPM, EDO, SDRAM, RDRAM) SRAM (Static RAM) veloce
La memoria principale DRAM (Dynamic RAM) il contenuto viene memorizzato per pochissimo tempo per cui deve essere aggiornato centinaia di volte al secondo (FPM, EDO, SDRAM, RDRAM) SRAM (Static RAM) veloce
Corso di Informatica Generale (C. L. Economia e Commercio) Ing. Valerio Lacagnina Rappresentazione dei numeri relativi
 Ing. Valerio Lacagnina Rappresentazione dei numeri relativi") Codice BCD Prima di passare alla rappresentazione dei numeri relativi in binario vediamo un tipo di codifica che ha una certa rilevanza in alcune applicazioni: il codice BCD (Binary Coded Decimal). È un
Codice BCD Prima di passare alla rappresentazione dei numeri relativi in binario vediamo un tipo di codifica che ha una certa rilevanza in alcune applicazioni: il codice BCD (Binary Coded Decimal). È un
Laboratorio di Architettura degli Elaboratori
 Laboratorio di Architettura degli Elaboratori Dott. Massimo Tivoli Set di istruzioni del MIPS32: istruzioni aritmetiche e di trasferimento Istruzioni (Alcune) Categorie di istruzioni in MIPS Istruzioni
Laboratorio di Architettura degli Elaboratori Dott. Massimo Tivoli Set di istruzioni del MIPS32: istruzioni aritmetiche e di trasferimento Istruzioni (Alcune) Categorie di istruzioni in MIPS Istruzioni
La macchina programmata Instruction Set Architecture (1)
") Corso di Laurea in Informatica Architettura degli elaboratori a.a. 2014-15 La macchina programmata Instruction Set Architecture (1) Schema base di esecuzione Istruzioni macchina Outline Componenti di un
Corso di Laurea in Informatica Architettura degli elaboratori a.a. 2014-15 La macchina programmata Instruction Set Architecture (1) Schema base di esecuzione Istruzioni macchina Outline Componenti di un
Calcolatori Elettronici
 Calcolatori Elettronici Classificazione dei calcolatori elettronici Sistemi basati sull architettura di Von Neumann Sistemi basati sull architettura Harward Architettura dei calcolatori: definizioni Evoluzione
Calcolatori Elettronici Classificazione dei calcolatori elettronici Sistemi basati sull architettura di Von Neumann Sistemi basati sull architettura Harward Architettura dei calcolatori: definizioni Evoluzione
FONDAMENTI DI INFORMATICA Lezione n. 11
 FONDAMENTI DI INFORMATICA Lezione n. 11 ARCHITETTURA INTERNA ARCHITETTURA ESTERNA CODICE MACCHINA MODI DI INDIRIZZAMENTO ARCHITETTURE A PIU' INDIRIZZI In questa lezione verranno introdotti i concetti di
FONDAMENTI DI INFORMATICA Lezione n. 11 ARCHITETTURA INTERNA ARCHITETTURA ESTERNA CODICE MACCHINA MODI DI INDIRIZZAMENTO ARCHITETTURE A PIU' INDIRIZZI In questa lezione verranno introdotti i concetti di
Lezione 3: Architettura del calcolatore
 Lezione 3: Architettura del calcolatore Architettura di Von Neumann BUS, CPU e Memoria centrale Ciclo di esecuzione delle istruzioni Architettura del calcolatore Il calcolatore è: uno strumento programmabile
Lezione 3: Architettura del calcolatore Architettura di Von Neumann BUS, CPU e Memoria centrale Ciclo di esecuzione delle istruzioni Architettura del calcolatore Il calcolatore è: uno strumento programmabile
Algoritmo. La programmazione. Algoritmo. Programmare. Procedimento di risoluzione di un problema
 Algoritmo 2 Procedimento di risoluzione di un problema La programmazione Ver. 2.4 Permette di ottenere un risultato eseguendo una sequenza finita di operazioni elementari Esempi: Una ricetta di cucina
Algoritmo 2 Procedimento di risoluzione di un problema La programmazione Ver. 2.4 Permette di ottenere un risultato eseguendo una sequenza finita di operazioni elementari Esempi: Una ricetta di cucina
PSPICE Circuiti sequenziali principali
 PSPICE Circuiti sequenziali principali Davide Piccolo Riccardo de Asmundis Elaboratori 1 Circuiti Sequenziali Tutti i circuiti visti fino ad ora erano circuiti combinatori, ossia circuiti in cui lo stato
PSPICE Circuiti sequenziali principali Davide Piccolo Riccardo de Asmundis Elaboratori 1 Circuiti Sequenziali Tutti i circuiti visti fino ad ora erano circuiti combinatori, ossia circuiti in cui lo stato
Il Modello di von Neumann (2) Prevede 3 entità logiche:
 Prevede 3 entità logiche:") Introduzione all Architettura degli Elaboratori Sommario Macchina di von Neumann Esecuzione dei programmi Rappresentazione dei dati Dati numerici Dati alfabetici 1 2 Il Modello di von Neumann (1) L architettura
Introduzione all Architettura degli Elaboratori Sommario Macchina di von Neumann Esecuzione dei programmi Rappresentazione dei dati Dati numerici Dati alfabetici 1 2 Il Modello di von Neumann (1) L architettura
I bistabili ed il register file
 I bistabili ed il register file Prof. Alberto Borghese ipartimento di Scienze dell Informazione [email protected] Università degli Studi di Milano 1/32 Sommario I problemi dei latch trasparenti sincroni
I bistabili ed il register file Prof. Alberto Borghese ipartimento di Scienze dell Informazione [email protected] Università degli Studi di Milano 1/32 Sommario I problemi dei latch trasparenti sincroni
Esercitazioni di Reti Logiche. Lezione 5
 Esercitazioni di Reti Logiche Lezione 5 Circuiti Sequenziali Zeynep KIZILTAN [email protected] Argomenti Circuiti sequenziali Flip-flop D, JK Analisi dei circuiti sequenziali Progettazione dei circuiti
Esercitazioni di Reti Logiche Lezione 5 Circuiti Sequenziali Zeynep KIZILTAN [email protected] Argomenti Circuiti sequenziali Flip-flop D, JK Analisi dei circuiti sequenziali Progettazione dei circuiti
Calcolatori Elettronici
 Calcolatori Elettronici RETI SEQUENZIALI : ESERCIZI Massimiliano Giacomin 1 Implementazione di contatori Un contatore è un dispositivo sequenziale che aggiorna periodicamente il suo stato secondo una regola
Calcolatori Elettronici RETI SEQUENZIALI : ESERCIZI Massimiliano Giacomin 1 Implementazione di contatori Un contatore è un dispositivo sequenziale che aggiorna periodicamente il suo stato secondo una regola
Lezione 20. Assembly MIPS: Il set istruzioni, strutture di controllo in Assembly
 Architettura degli Elaboratori Lezione 20 Assembly MIPS: Il set istruzioni, strutture di controllo in Assembly Prof. F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli Elaboratori Lezione 20 Assembly MIPS: Il set istruzioni, strutture di controllo in Assembly Prof. F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli Elaboratori
 Moltiplicazione e divisione tra numeri interi: algoritmi e circuiti slide a cura di Salvatore Orlando, Marta Simeoni, Andrea Torsello Operazioni aritmetiche e logiche Abbiamo visto che le ALU sono in grado
Moltiplicazione e divisione tra numeri interi: algoritmi e circuiti slide a cura di Salvatore Orlando, Marta Simeoni, Andrea Torsello Operazioni aritmetiche e logiche Abbiamo visto che le ALU sono in grado
Programmazione strutturata
 Corso di Fondamenti di Informatica Corso di Laurea in Ingegneria Gestionale (L-Z) 3. (testo di riferimento: Bellini-Guidi) Ing. Michele Ruta 1di 29 Linguaggi di programmazione Un programma è un algoritmo
Corso di Fondamenti di Informatica Corso di Laurea in Ingegneria Gestionale (L-Z) 3. (testo di riferimento: Bellini-Guidi) Ing. Michele Ruta 1di 29 Linguaggi di programmazione Un programma è un algoritmo
Introduzione alle macchine a stati (non definitivo)
") Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
Lecture 2: Prime Istruzioni
 [http://www.di.univaq.it/muccini/labarch] Modulo di Laboratorio di Architettura degli Elaboratori Corso di Architettura degli Elaboratori con Laboratorio Docente: H. Muccini Lecture 2: Prime Istruzioni
[http://www.di.univaq.it/muccini/labarch] Modulo di Laboratorio di Architettura degli Elaboratori Corso di Architettura degli Elaboratori con Laboratorio Docente: H. Muccini Lecture 2: Prime Istruzioni
Calcolatori Elettronici Parte VIII: linguaggi assemblativi
 Anno Accademico 2013/2014 Calcolatori Elettronici Parte VIII: linguaggi assemblativi Prof. Riccardo Torlone Universita di Roma Tre Linguaggi di Programmazione Linguaggi ad alto livello Maggiore espressività
Anno Accademico 2013/2014 Calcolatori Elettronici Parte VIII: linguaggi assemblativi Prof. Riccardo Torlone Universita di Roma Tre Linguaggi di Programmazione Linguaggi ad alto livello Maggiore espressività
Struttura del calcolatore
 Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione